

Ultrahigh Speed
LOWPASS
FILTER
1/N
VCO
AD9901
REFERENCE
INPUT
OSCILLATOR
OUTPUT
OPTIONAL 1/N PRESCALER
TYPICAL OF DIGITAL PLLs
a
FEATURES
Phase and Frequency Detection
ECL/TTL/CMOS Compatible
Linear Transfer Function
No “Dead Zone”
MIL-STD-883 Compliant Versions Available
APPLICATIONS
Low Phase Noise Reference Loops
Fast-Tuning “Agile” IF Loops
Secure “Hopping” Communications
Coherent Radar Transmitter/Receiver Chains
GENERAL DESCRIPTION
The AD9901 is a digital phase/frequency discriminator capable
of directly comparing phase/frequency inputs up to 200 MHz.
Processing in a high speed trench-oxide isolated process, combined with an innovative design, gives the AD9901 a linear
detection range, free of indeterminate phase detection zones
common to other digital designs.
With a single +5 V supply, the AD9901 can be configured to
operate with TTL or CMOS logic levels; it can also operate
with ECL inputs when operated with a –5.2 V supply. The
open-collector outputs allow the output swing to be matched to
post-filtering input requirements. A simple current setting resistor controls the output stage current range, permitting a reduction in power when operated at lower frequencies.
Phase/Frequency Discriminator
AD9901
PHASE-LOCKED LOOP
A major feature of the AD9901 is its ability to compare
phase/frequency inputs at standard IF frequencies without
prescalers. Excessive phase uncertainty which is common with
standard PLL configurations is also eliminated. The AD9901
provides the locking speed of traditional phase/frequency discriminators, with the phase stability of analog mixers.
The AD9901 is available as a commercial temperature range
device, 0°C to +70°C, and as a military temperature device,
–55°C to +125°C. The commercial versions are packaged in a
14-lead ceramic DIP and a 20-lead PLCC.
The AD9901 Phase/Frequency Discriminator is available in
versions compliant with MIL-STD-883. Refer to the Analog
Devices Military Products Databook or current AD9901/883B
data sheet for specifications.
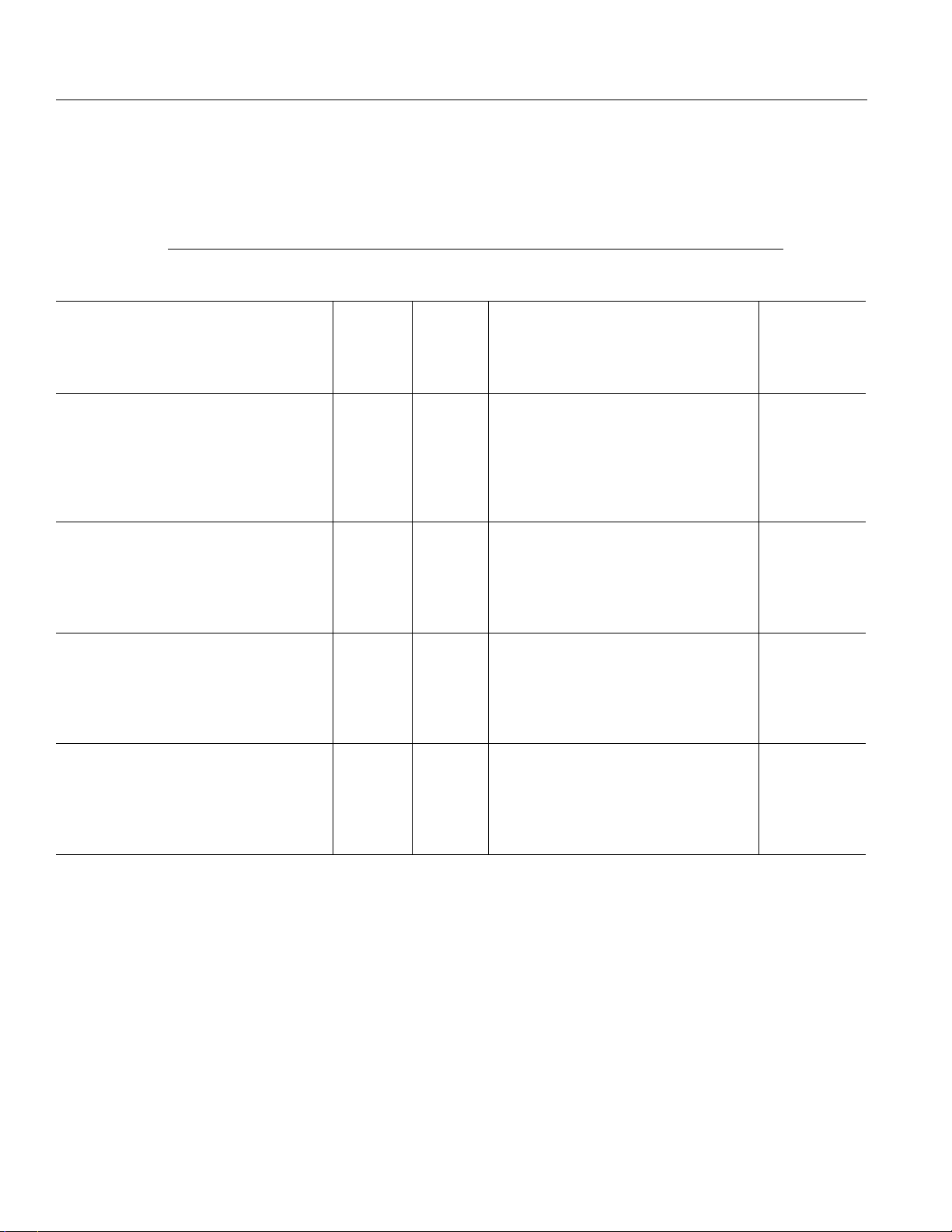
FUNCTIONAL BLOCK DIAGRAM
DQ
REFERENCE
INPUT
REFERENCE
INPUT
OSCILLATOR
INPUT
FLIP-FLOP
DQ
OSCILLATOR
FLIP-FLOP
Q
XOR
INPUT
Q
REV. B
Information furnished by Analog Devices is believed to be accurate and
reliable. However, no responsibility is assumed by Analog Devices for its
use, nor for any infringements of patents or other rights of third parties
which may result from its use. No license is granted by implication or
otherwise under any patent or patent rights of Analog Devices.
DQ
REFERENCE
FREQUENCY
DISCRIMINATOR
FLIP-FLOP
DQ
OSCILLATOR
FREQUENCY
DISCRIMINATOR
FLIP-FLOP
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781/329-4700 World Wide Web Site: http://www.analog.com
Fax: 781/326-8703 © Analog Devices, Inc., 1999
Q
R
S
Q
OUTPUT
OUTPUT
AD9901–SPECIFICATIONS
ABSOLUTE MAXIMUM RATINGS
1
Positive Supply Voltage (+VS for TTL Operation) . . . . . +7 V
Negative Supply Voltage (–V
for ECL Operation) . . . . . –7 V
S
Input Voltage Range (TTL Operation) . . . . . . . 0 V to +5.5 V
Differential Input Voltage (ECL Operation) . . . . . . . . . .4.0 V
Current . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 mA
I
SET
Output Current . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30 mA
ELECTRICAL CHARACTERISTICS
(ⴞVS = +5.0 V [for TTL] or –5.2 V [for ECL], unless otherwise noted)
Operating Temperature Range
AD9901KQ/KP . . . . . . . . . . . . . . . . . . . . . . . 0°C to +70°C
Storage Temperature Range . . . . . . . . . . . . –65°C to +150°C
Junction Temperature
2
Plastic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .+150°C
Ceramic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .+175°C
Lead Soldering Temperature (10 sec) . . . . . . . . . . . . .+300°C
Commercial Temperature
0ⴗC to +70ⴗC
AD9901KQ/KP
Test
Temp Level Min Typ Max Units
INPUT CHARACTERISTICS
TTL Input Logic “1” Voltage Full VI 2.0 V
TTL Input Logic “0” Voltage Full VI 0.8 V
TTL Input Logic “1” Current
TTL Input Logic “0” Current
3
3
Full VI 0.6 mA
Full VI 1.6 mA
ECL Differential Switching Voltage Full VI 300 mV
ECL Input Current Full VI 20 µA
OUTPUT CHARACTERISTICS
Peak-to-Peak Output Voltage Swing
4
Full VI 1.6 1.8 2.0 V
TTL Output Compliance Range Full V 3–7 V
ECL Output Compliance Range Full V ±2V
Range Full V 0.9–11 mA
I
OUT
Internal Reference Voltage Full VI 0.42 0.47 0.52 V
AC CHARACTERISTICS
Linear Phase Detection Range
4
40 kHz +25°C V 360 Degrees
30 MHz +25°C V 320 Degrees
70 MHz +25°C V 270 Degrees
Functionality @ 70 MHz +25°C I Pass/Fail
POWER SUPPLY CHARACTERISTICS
TTL Supply Current (+5.0 V)
ECL Supply Current (–5.2 V)
5, 6
5, 6
+25°C I 43.5 54.0 mA
Full I 43.5 54.0 mA
+25°C I 42.5 52.5 mA
Full I 42.5 52.5 mA
Nominal Power Dissipation +25°C V 218 mW
NOTES
1
Absolute maximum ratings are limiting values, to be applied individually, and beyond which the service ability of the circuit may be impaired. Functional operability
is not necessarily implied. Exposure to absolute maximum rating conditions for an extended period of time may affect device reliability.
2
Maximum junction temperature should not exceed +175 °C for ceramic packages, +150°C for plastic packages. Junction temperature can be calculated by:
t
= PD (θ
J
where:
PD = power dissipation
θJA = thermal impedance from junction to air (°C/W)
θJC = thermal impedance from junction to case (°C/W)
t
= ambient temperature (°C)
A
t
= case temperature (°C)
C
typical thermal impedances:
AD9901 Ceramic DIP = θJA = 74°C/W; θJC = 21°C/W
AD9901 LCC = θJA = 80°C/W; θJC = 19°C/W
AD9901 PLCC = θJA = 88.2°C/W; θJC = 45.2°C/W
3
VL = +0.4 V; VH = +2.4 V.
4
R
= 47.5 Ω; RL = 182 Ω.
SET
5
lncludes load current of 10 mA (load resistors = 182 Ω).
6
Supply should remain stable within ±5% for normal operation.
Specifications subject to change without notice.
) +t
= PD (θ
JA
A
) +t
JC
C
REV. B–2–

S
+5.0V
0.47V
REFERENCE
TTL MODE = GROUND
ECL MODE = V
S
(–5.2V)
R
SET
TTL MODE = +VS (+5.0V)
ECL MODE = GROUND
AD9901
INPUT/OUTPUT EQUIVALENT CIRCUITS
(Based on DIP Pinouts)
VCO/REF, INPUT
DA3
V
MID
1kV
AD9901
5/12
VCO/REF, INPUT
VCO/REF, INPUT
4/13
3/14
–5.2V
TTL Input ECL Input Output
AD9901 BURN-IN CIRCUIT
(Based on DIP ECL Pinouts)
180V
50V
REG
0.01mF
–V
(–5.2V)
S
DIE LAYOUT AND MECHANICAL INFORMATION
GND (REFERENCE IN)
GND (REFERENCE IN)
GND (VCO IN)
REFERENCE IN (–VS)+VS (GND) OUTPUT
GND (–V
)
S
VS (–VS)
VCO IN (–V
)GND (VCO IN)
OUTPUT
R
SET
GND (–VS)
(GND)
+V
S
MID
180V
ALL RESISTORS 65%
ALL CAPACITORS 620%
ALL SUPPLY VOLTAGES 65%
V
= –1.3V 65%
MID
STATIC: DA2 = ECL HIGH; DA3 = ECL LOW
DYNAMIC: ECL HIGH
ORDERING GUIDE
Temperature Package Package
DA2
ECL HIGH
DA2
ECL LOW
ECL HIGH
DA3
ECL LOW
1kV
V
Model Ranges Descriptions Options
AD9901KQ 0°C to +70°C 14-Lead Cerdip Q-14
AD9901KP 0°C to +70°C 20-Lead Plastic Leaded Chip Carrier P-20A
AD9901TQ/883
AD9901TE/883
NOTE
1
For specifications, refer to Analog Devices Military Products Databook.
1
–55°C to +125°C 14-Lead Cerdip Q-14
1
–55°C to +125°C 20-Terminal Ceramic Leadless Chip Carrier E-20A
REV. B –3–
Die Dimensions . . . . . . . . . . . . . . . . . 63 × 118 × 16 (±2) mils
Pad Dimensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 × 4 mils
Metalization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Aluminum
Backing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . None
Substrate Potential . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . –V
Passivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Nitride
Die Attach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Gold Eutectic
Bond Wire . . . . . . . . 1.25 mil Aluminum; Ultrasonic Bonding
S

AD9901
TTL/CMOS MODE FUNCTIONAL PIN DESCRIPTIONS
GROUND Ground connections for AD9901. Connect
all grounds together and to low impedance
ground plane as close to the device as
possible.
+V
S
Positive supply connection; nominally +5.0 V
for TTL operation.
BIAS Connect to +V
(+5 V) for TTL operation.
S
VCO INPUT TTL compatible input; normally connected
to the VCO output signal. VCO INPUT and
REFERENCE INPUT are equivalent to one
another.
OUTPUT The noninverted output. In TTL/CMOS
mode, the output swing is approximately
+3.2 V to +5 V.
R
SET
External R
through the R
mum full-scale output current. R
connection. The current
SET
resistor is equal to the maxi-
SET
SET
should
be connected to ground through an external
resistor in TTL mode. I
(max).
I
LOAD
= 0.47 V/R
SET
SET
=
OUTPUT The inverted output. In TTL/CMOS mode,
the output swing is approximately +3.2 V to
+5 V.
REFERENCE TTL compatible input, normally connected
INPUT to the reference input signal. The VCO
INPUT and the REFERENCE INPUT are
equivalent.
+V
S
R1
REFERENCE
OUTPUT
+V
S
OUTPUT
R2
R
SET
ECL MODE FUNCTIONAL PIN DESCRIPTIONS
–V
S
Negative supply connection, nominally
–5.2 V for ECL operation.
BIAS Connect to –5.2 V for ECL operation.
VCO INPUT Inverted side of ECL compatible differential
input, normally connected to the VCO output
signal.
VCO INPUT Noninverted side of ECL-compatible
differential input, normally connected to the
VCO output signal.
OUTPUT The noninverted output. In ECL mode, the
output swing is approximately 0 V to –1.8 V.
GROUND Ground connections for AD9901. Connect
all grounds together and to low-impedance
ground plane as close to the device as
possible.
R
SET
External R
through the R
mum full-scale output current. R
be connected to –V
resistor in ECL mode. I
(max).
I
LOAD
connection. The current
SET
resistor is equal to the maxi-
SET
through an external
S
SET
SET
= 0.47 V/R
should
SET
=
OUTPUT The inverted output. In ECL mode, the out-
put swing is approximately 0 V to –1.8 V.
REFERENCE Noninverted side of ECL-compatible
INPUT differential input, normally connected to the
reference input signal. The VCO INPUT and
the REFERENCE INPUT are equivalent to
one another.
REFERENCE Inverted side of ECL-compatible differential
INPUT input, normally connected to the reference
input signal. The VCO INPUT and the
REFERENCE INPUT are equivalent.
–V
S
R1
REFERENCE
INPUT
REFERENCE
INPUT
–V
S
OUTPUT
R2
R
SET
AD9901
REG
BIAS
+V
S
VCO
INPUT
OUTPUT
+V
R3
+V
S
S
Figure 1. TTL Mode (Based on DIP Pinouts)
AD9901
REG
BIAS
–V
S
VCO
INPUT
VCO
INPUT
–V
OUTPUT
S
R3
Figure 2. ECL Mode (Based on DIP Pinouts)
REV. B–4–

EXPLANATION OF TEST LEVELS
Test Level
I – 100% production tested.
II – 100% production tested at +25°C, and sample tested
at specified temperatures.
III – Sample tested only.
IV – Parameter is guaranteed by design and characteriza-
tion testing.
PIN CONFIGURATIONS
AD9901
V – Parameter is a typical value only.
VI – All devices are 100% production tested at +25°C. 100%
production tested at temperature extremes for extended
temperature devices; sample tested at temperature extremes for commercial/industrial devices.
GROUND
BIAS
GROUND
GROUND
VCO INPUT
OUTPUT
+V
S
4
GROUND
NC
5
6
GROUND
7
NC
VCO INPUT
8
NC = NO CONNECT
TTL DIP Pinouts
1
2
3
AD9901
4
TOP VIEW
(Not to Scale)
5
6
7
14
GROUND
13
GROUND
12
REFERENCE INPUT
11
+V
10
OUTPUT
9
R
SET
8
GROUND
TTL LCC Pinouts
BIASOUTPUT
GROUNDNCGROUND
GROUND
20 19123
AD9901
TOP VIEW
(Not to Scale)
910111213
S
NC
+V
SET
R
GROUND
S
18
REFERENCE INPUT
NC
17
16
+V
S
15
NC
14
OUTPUT
ECL DIP Pinouts
1
–V
S
2
BIAS
–V
S
3
4
(Not to Scale)
5
6
7
VCO INPUT
VCO INPUT
OUTPUT
GROUND
ECL LCC Pinouts
VCO INPUT
VCO INPUT
NC = NO CONNECT
4
NC
5
6
7
NC
8
–V
S
AD9901
TOP VIEW
BIASOUTPUT
–VSNC
AD9901
TOP VIEW
(Not to Scale)
910111213
GROUND
14
REFERENCE INPUT
13
REFERENCE INPUT
12
–V
S
11
GROUND
10
OUTPUT
9
R
SET
8
–V
S
REFERENCE INPUT
REFERENCE INPUT
20 19123
18
17
16
15
14
S
NC
SET
–V
R
–V
S
NC
GROUND
NC
OUTPUT
TTL PLCC Pinouts
BIAS
GROUND
NC
GROUND
PIN 1
IDENTIFIER
NC
GROUND
18
17
16
15
14
SET
R
S
OUTPUT
3 2 1 20 19
GROUND REFERENCE INPUT
GROUND NC
VCO INPUT +V
NC = NO CONNECT
4
5
AD9901
6
TOP VIEW
(Not to Scale)
7
OUTPUT NC
8
NC
9 10 11 12 13
S
NC
+V
GROUND
REV. B –5–
ECL PLCC Pinouts
S
BIAS
–V
NC
REFERENCE INPUT
3 2 1 20 19
VCO INPUT
VCO INPUT NC
NC = NO CONNECT
4
5
6
(Not to Scale)
7
8
9 10 11 12 13
AD9901
TOP VIEW
–V
S
OUTPUT NC
NC
NC
GROUND
REFERENCE INPUT
PIN 1
IDENTIFIER
S
NC
SET
–V
R
18
–V
17
GROUND
16
15
14
OUTPUT
S

AD9901
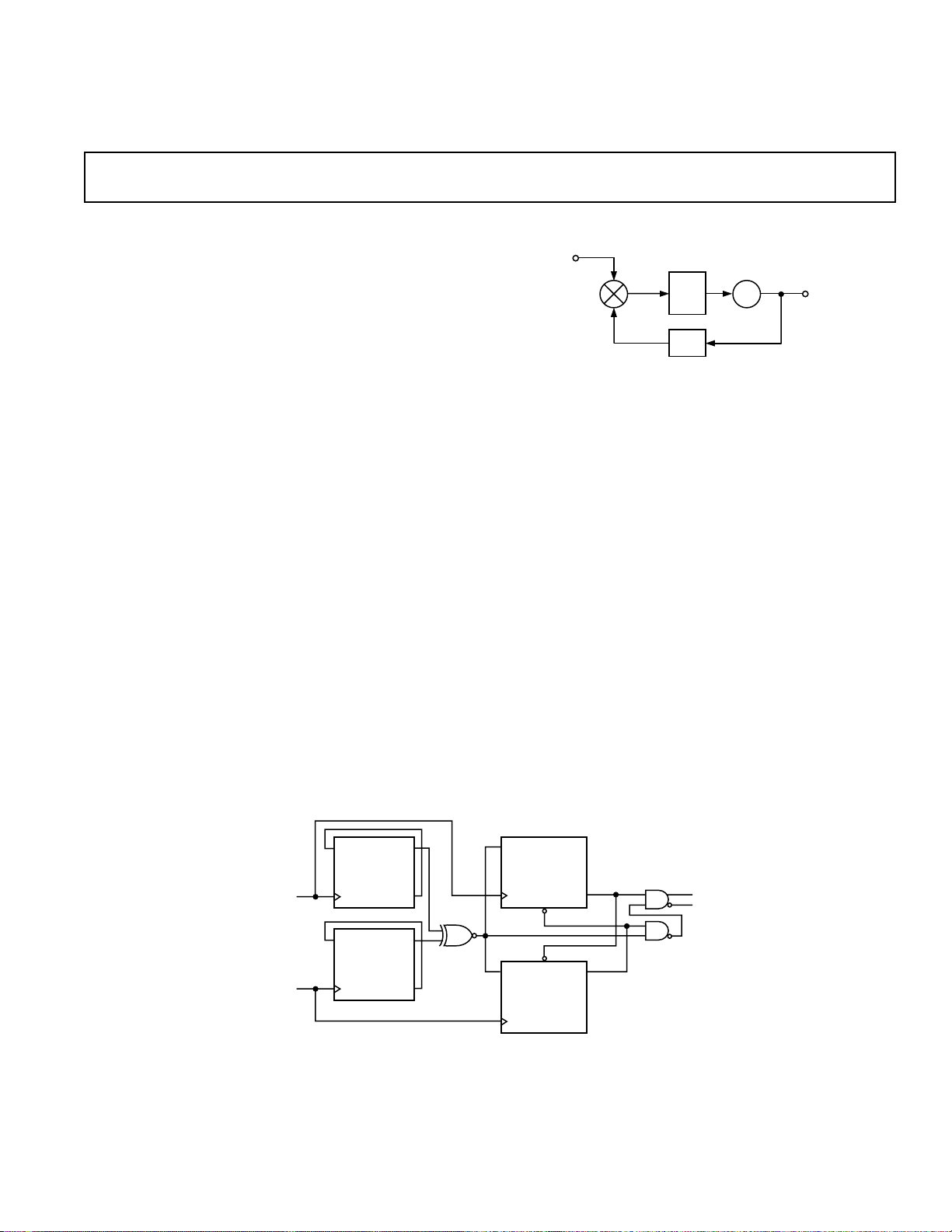
THEORY OF OPERATION
A phase detector is one of three basic components of a phaselocked loop (PLL); the other two are a filter and a tunable oscillator. A basic PLL control system is shown in Figure 3.
REFERENCE
INPUT
LOWPASS
FILTER
VCO
OSCILLATOR
OUTPUT
AD9901
1/N
OPTIONAL 1/N PRESCALER
TYPICAL OF DIGITAL PLLs
Figure 3. Phase-Locked Loop Control System
The function of the phase detector is to generate an error signal
that is used to retune the oscillator frequency whenever its output deviates from a reference input signal. The two most common methods of implementing phase detectors are (1) an analog
mixer and (2) a family of sequential logic circuits known as
digital phase detectors.
The AD9901 is a digital phase detector. As illustrated in the
block diagram of the unit, straightforward sequential logic design is used. The main components include four “D” flip-flops,
an exclusive-OR gate (XOR) and some combinational output
logic. The circuit operates in two distinct modes: as a linear
phase detector and as a frequency discriminator.
When the reference and oscillator are very close in frequency,
only the phase detection circuit is active. If the two inputs are
substantially different in frequency, the frequency discrimination circuit overrides the phase detector portion to drive the
oscillator frequency toward the reference frequency and put it
within range of the phase detector.
Input signals to the AD9901 are pulse trains, and its output
duty cycle is proportional to the phase difference of the oscillator and reference inputs. Figures 4, 5 and 6 illustrate, respectively, the input/output relationships at lock; with the
REFERENCE
INPUT
OSCILLATOR
INPUT
REFERENCE
FLIP-FLOP
OUTPUT
OSCILLATOR
FLIP-FLOP
OUTPUT
XORGATE
OUTPUT
DC MEAN VALUE
Figure 4. AD9901 Timing Waveforms at “Lock”
REFERENCE
INPUT
OSCILLATOR
INPUT
REFERENCE
FLIP-FLOP
OUTPUT
OSCILLATOR
FLIP-FLOP
OUTPUT
XORGATE
OUTPUT
Figure 5. Timing Waveforms (
DC MEAN VALUE
φ
OUT
Leads
φ
)
IN
REFERENCE
INPUT
OSCILLATOR
INPUT
REFERENCE
FLIP-FLOP
OUTPUT
OSCILLATOR
FLIP-FLOP
OUTPUT
XORGATE
OUTPUT
Figure 6. Timing Waveforms (
DC MEAN VALUE
φ
OUT
Lags
φ
)
IN
oscillator leading the reference frequency; and with the oscillator
lagging. This output pulse train is low-pass filtered to extract the
dc mean value [K
(φI – φ
φ
)] where Kφ is a proportionality con-
O
stant (phase gain).
At or near lock (Figures 4, 5 and 6), only the two input flipflops and the exclusive-OR gate (the phase detection circuit) are
active. The input flip-flops divide both the reference and oscillator frequencies by a factor of two. This insures that inputs to the
exclusive-OR are square waves, regardless of the input duty
cycles of the frequencies being compared. This division-by-two
also moves the nonlinear detection range to the ends of the
range rather than near lock, which is the case with conventional
digital phase detectors.
Figure 7 illustrates the constant gain near lock.
2
FO = 70MHz
1
OUTPUT VOLTAGE SWING
0
–2p
PHASE DIFFERENCE AT INPUTS
FO = 200MHz
TYPICAL PHASE DETECTOR
GAIN IS 0.2865V/RAD
–p
DV
OUT
FO = 50MHz
= 1.8V
0
Figure 7. Phase Gain Plot
When the two square waves are combined by the XOR, the
output has a 50% duty cycle if the reference and oscillator in-
puts are exactly 180° out of phase; under these conditions, the
AD9901 is operating in a locked mode. Any shift in the phase
relationship between these input signals causes a change in the
output duty cycle. Near lock, the frequency discriminator flipflops provide constant HIGH levels to gate the XOR output to
the final output.
The duty cycle of the AD9901 is a direct measure of the phase
difference between the two input signals when the unit is near
lock. The transfer function can be stated as [K
where K
is the allowable output voltage range of the AD9901
φ
(φI – φ
φ
](V/RAD),
O
divided by 2 π.
For a typical output swing of 1.8 V, the transfer function can be
stated as (1.8 V/2 π = 0.285 V/RAD). Figure 7 shows the rela-
tionship of the dc mean value of the AD9901 output as a function of the phase difference of the two inputs.
REV. B–6–

AD9901
10
0%
100
90
500mV
5ns
VARACTORS TUNING VOLTAGE – Volts
165
–1
VCO FREQUENCY – MHz
155
145
135
125
115
105
95
85
75
65
0
12 3 4 5 6
REV. B –7–
500mV
100
90
10
0%
200ns
Figure 8. AD9901 Output Waveform
(F
<< FI)
O
500mV
100
90
10
0%
Figure 9. AD9901 Output Waveform
(F
>> FI)
O
It is important to note that the slope of the transfer function is
constant near its midpoint. Many digital phase comparators have
an area near the lock point where their gain goes to zero, resulting in a “dead zone.” This causes increased phase noise (jitter) at
the lock point.
The AD9901 avoids this dead zone by shifting it to the endpoints of the transfer curve, as indicated in Figure 7. The increased gain at either end increases the effective error signal to
pull the oscillator back into the linear region. This does not
affect phase noise, which is far more dependent upon lock region
characteristics.
It should be noted, however, that as frequency increases, the
linear range is decreased. At the ends of the detection range, the
reference and oscillator inputs approach phase alignment. At this
point, slew rate limiting in the detector effectively increases
phase gain. This decreases the linear detection by nominally
3.6 ns. Therefore, the typical detection range can be found by
calculating [(1/F – 3.6 ns)/(1/F)] × 360°. As an example, at
200 MHz the linear phase detection range is ±50°.
Away from lock, the AD9901 becomes a frequency discriminator. Any time either the reference or oscillator input occurs twice
before the other, the Frequency High or Frequency Low flip-flop
is clocked to logic LOW. This overrides the XOR output and
holds the output at the appropriate level to pull the oscillator
toward the reference frequency. Once the frequencies are within
the linear range, the phase detector circuit takes over again.
Combining the frequency discriminator with the phase detector
eliminates locking to a harmonic of the reference.
Figure 8 shows the effect of the “Frequency Low” flip-flop when
the oscillator frequency is much lower than the reference input.
The narrow pulses, which result from cycles when two positive
reference-input transitions occur before a positive VCO edge,
increase the dc mean value. Figure 9 illustrates the inverse effect
when the “Frequency High” flip-flop reacts to a much higher
VCO frequency.
Figure 10 shows the output waveform at lock for 50 MHz operation. This output results when the phase difference between
reference and oscillator is approximately – πRad.
AD9901 APPLICATIONS
The figure below illustrates a phase-locked loop (PLL) system
utilizing the AD9901. The first step in designing this type of
circuit is to characterize the VCO’s output frequency as a function of tuning voltage. The transfer function of the oscillator in
the diagram is shown in Figure 11.
200ns
Figure 10. AD9901 Output Waveform
(F
= FI = 50 MHz)
O
Figure 11. VCO Frequency vs. Voltage
Next, the range of frequencies over which the VCO is to operate
is examined to assure that it lies on a linear portion of the transfer
curve. In this case, frequencies from 100 MHz to 120 MHz
result from tuning voltages of approximately +1.5 V to +2.5 V.
Because the nominal output swing of the AD9901 is 0 V to –1.8 V,
an inverting amplifier with a gain of 2 follows the loop filter.
As shown in the illustration, a simple passive RC low-pass filter
made up of two resistors and a tantalum capacitor eliminates the
need for an expensive high speed op amp active-filter design. In
this passive-filter second-order-loop system, where n = 2, the
damping factor is equal to:
δ = 0.5 [K
OKd
and the values for τ
/n(τ
and
1
1/2
+
τ
)]
[τ
1
2
τ
2
+ (n/KOKd)]
2
are the low-pass filter’s time constants R1C and R2C. The gain of 2 of the inverting stage, when
combined with the phase detector’s gain, gives:
K
= 0.572 V/RAD
d
With K
3.11 × 10
= 115.2 MRAD/s/V, τ1 equals 1.715s, and τ
O
–4
s for the required damping factor of 0.7. The illus-
equals
2
trated values of 30 Ω (R1), 160 Ω (R2), and 10 µF (C) in the
diagram approximate these time constants.
The gain of the RC filter is:
V
= (1 + sR2C)/[1 + s(R1 + R2)C].
O/VI
Where K
ω
n
>> ω
OKd
= [KOKd/n(
, the system’s natural frequency:
n
1
+
1/2
τ
)]
2
= 4.5 kHz.
τ
For general information about phase-locked loop design, the
user is advised to consult the following references: Gardner,
Phase-Lock Techniques (Wiley); or Best, Phase Locked Loops
(McGraw-Hill).

AD9901
3
PIN 1
IDENTIFIER
4
19
18
8
9
14
13
TOP VIEW
(PINS DOWN)
0.395 (10.02)
0.385 (9.78)
SQ
0.356 (9.04)
0.350 (8.89)
SQ
0.048 (1.21)
0.042 (1.07)
0.048 (1.21)
0.042 (1.07)
0.020
(0.50)
R
0.050
(1.27)
BSC
0.021 (0.53)
0.013 (0.33)
0.330 (8.38)
0.290 (7.37)
0.032 (0.81)
0.026 (0.66)
0.180 (4.57)
0.165 (4.19)
0.040 (1.01)
0.025 (0.64)
0.056 (1.42)
0.042 (1.07)
0.025 (0.63)
0.015 (0.38)
0.110 (2.79)
0.085 (2.16)
+V
AD9901
DIP
PINOUTS
ALTERNATE HIGH LEVEL
OUTPUT CIRCUIT
TYPICALLY +15V TO +60V)
(6V
S
REFERENCE
INPUT
S
OUTPUT
OUTPUT
55MHz
+5.0V
–5.2V
–5.2V
AD96685
OSC OSC
50V
–2V
REFREF
AD9901
47.5V
50V
OUT
OUT
–5.2V
DIVIDE-
BY-TWO
–5.2V
R
SET
182V
160kV
30V
10mF
LOOP
FILTER
OSCILLATOR
OUTPUT
110MHz
50V
–2V
OSCILLATOR
MC1648
–5.2V
AD741
OFFSET
1kV 2kV
1kV
390V
100nH
–5.2V
AD741
C1272b–0–1/99
MV1404
51kV
MV1404
Figure 12. Phased-Locked Loop Using AD9901
OUTLINE DIMENSIONS
Dimensions shown in inches and (mm).
14-Lead Cerdip
(Q-14)
0.005 (0.13) MIN 0.098 (2.49) MAX
0.200 (5.08)
MAX
0.200 (5.08)
0.125 (3.18)
14
1
PIN 1
0.785 (19.94) MAX
0.023 (0.58)
0.014 (0.36)
0.100
(2.54)
BSC
8
0.310 (7.87)
0.220 (5.59)
7
0.060 (1.52)
0.015 (0.38)
0.070 (1.78)
0.030 (0.76)
0.150
(3.81)
MIN
SEATING
PLANE
0.320 (8.13)
0.290 (7.37)
15°
0°
0.015 (0.38)
0.008 (0.20)
0.358 (9.09)
0.342 (8.69)
20-Terminal Ceramic Leadless Chip Carrier 20-Lead Plastic Leaded Chip Carrier
(E-20A) (P-20A)
0.200 (5.08)
BSC
0.075
(1.91)
REF
0.055 (1.40)
0.045 (1.14)
REF
19
18
14
13
20
1
BOTTOM
VIEW
0.150 (3.81)
0.100 (2.54) BSC
0.015 (0.38)
3
MIN
4
0.050 (1.27)
8
BSC
9
45° TYP
BSC
0.028 (0.71)
0.022 (0.56)
SQ
0.100 (2.54)
0.064 (1.63)
0.358
(9.09)
MAX
SQ
0.088 (2.24)
0.054 (1.37)
0.095 (2.41)
0.075 (1.90)
0.011 (0.28)
0.007 (0.18)
R TYP
0.075 (1.91)
PRINTED IN U.S.A.
REV. B–8–
 Loading...
Loading...