

14-Bit, 2.5 GSPS,
Data Sheet
FEATURES
Direct RF synthesis at 2.5 GSPS update rate
DC to 1.25 GHz in baseband mode
1.25 GHz to 3.0 GHz in mix mode
Industry leading single/multicarrier IF or RF synthesis
f
= 350 MHz, ACLR =80 dBc
OUT
f
= 950 MHz, ACLR = 78 dBc
OUT
f
= 2100 MHz, ACLR = 69 dBc
OUT
Dual-port LVDS data interface
Up to 1.25 GSPS operation
Source synchronous DDR clocking
Pin-compatible with the AD9739A
Multichip synchronization capability
Programmable output current: 8.7 mA to 31.7 mA
Low power: 1.16 W at 2.5 GSPS
APPLICATIONS
Broadband communications systems
Military jammers
Instrumentation, automatic test equipment
Radar, avionics
GENERAL DESCRIPTION
The AD9739 is a 14-bit, 2.5 GSPS high performance RF digitalto-analog converter (DAC) capable of synthesizing wideband
signals from dc up to 3.0 GHz. Its DAC core features a quadswitch architecture that provides exceptionally low distortion
performance with an industry-leading direct RF synthesis
capability. This feature enables multicarrier generation up to
the Nyquist frequency in baseband mode as well as second and
third Nyquist zones in mix mode. The output current can be
programmed over the 8.66 mA to 31.66 mA range.
The inclusion of on-chip controllers simplifies system integration.
A dual-port, source synchronous, LVDS interface simplifies the
digital interface with existing FGPA/ASIC technology. On-chip
controllers are used to manage external and internal clock domain
variations over temperature to ensure reliable data transfer from
the host to the DAC core. Multichip synchronization is possible
with an on-chip synchronization controller. A serial peripheral
interface (SPI) is used for device configuration as well as readback
of status registers.
The AD9739 is manufactured on a 0.18 µm CMOS process and
operates from 1.8 V and 3.3 V supplies. It is supplied in a 160-ball
chip scale ball grid array for reduced package parasitics.
RF Digital-to-Analog Converter
AD9739
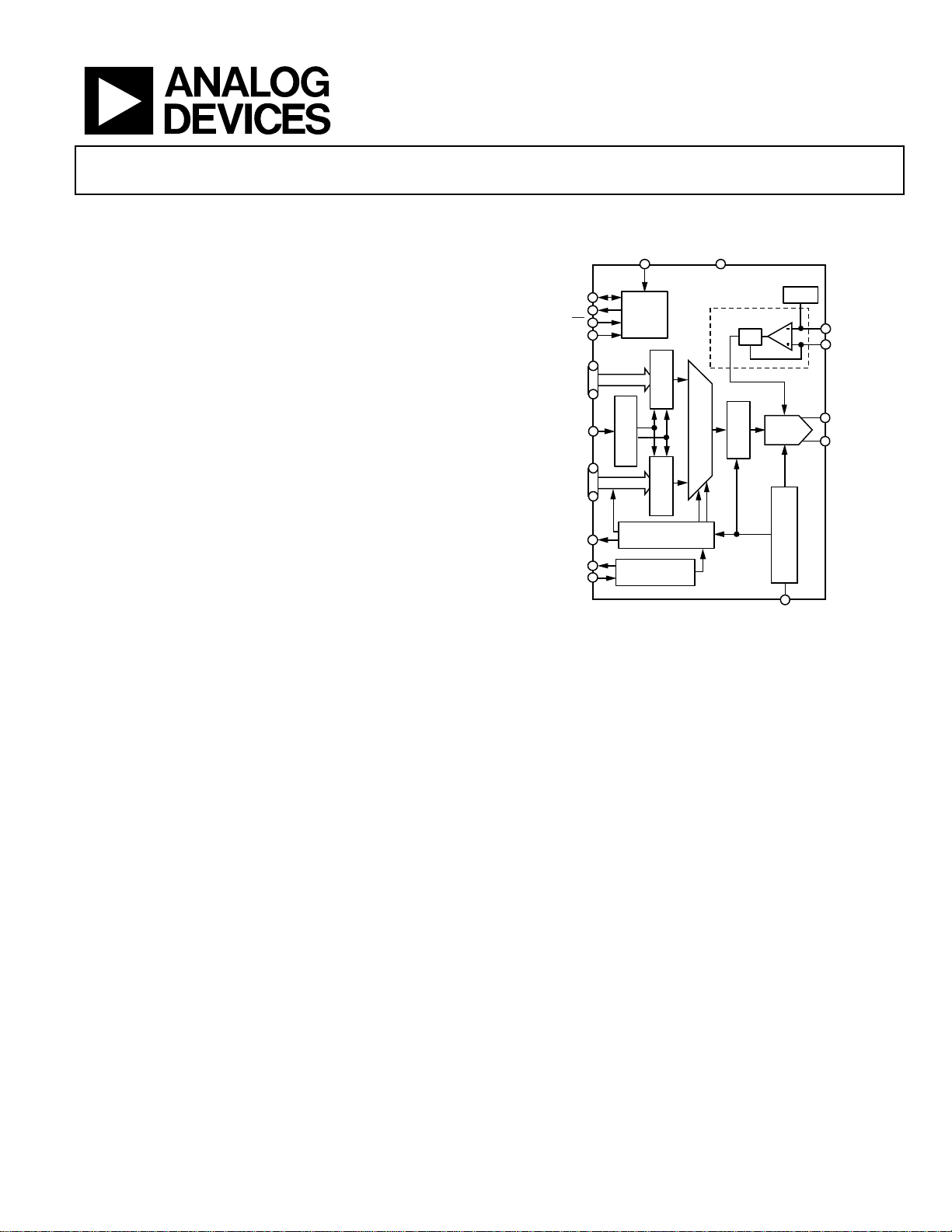
FUNCTIONAL BLOCK DIAGRAM
RESET
SDIO
SDO
CS
SCLK
DCI
DCO
SYNC_OUT
SYNC_IN
DB0[13:0]DB1[13:0]
SPI
LVDS DDR
DATA
CONTRO LLER
LVDS DDR
CLK DISTRIBUT ION
(DIV-BY-4)
SYNC-
CONTRO LLER
PRODUCT HIGHLIGHTS
1. Ability to synthesize high quality wideband signals with
bandwidths of up to 1.25 GHz in the first or second
Nyquist zone.
2. A proprietary quad-switch DAC architecture provides
exceptional ac linearity performance while enabling mix
mode operation.
3. A dual-port, double data rate, LVDS interface supports the
maximum conversion rate of 2500 MSPS.
4. On-chip controllers manage external and internal clock
domain skews.
5. A multichip synchronization capability.
6. Programmable differential current output with a 8.66 mA
to 31.66 mA range.
RECEIVER
RECEIVER
Figure 1.
IRQ
AD9739
DAC BIAS
4-TO-1
DATA ASSEMBLER
1.2V
VREF
I120
TxDAC
CORE
DATA
LATCH
DLL
DACCLK
IOUTP
IOUTN
(MU CONTROL LER)
07851-001
Rev. B
Information furnished by Analog Devices is believed to be accurate and reliable. However, no
responsibility is assumed by Analog Devices for its use, nor for any infringements of patents or other
rights of third parties that may result from its use. Specifications subject to change without notice. No
license is granted by implication or otherwise under any patent or patent rights of Analog Devices.
Trademarks and registered trademarks are the property of their respective owners.
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781.329.4700 www.analog.com
Fax: 781.461.3113 ©2009–2012 Analog Devices, Inc. All rights reserved.

AD9739 Data Sheet
TABLE OF CONTENTS
Features.............................................................................................. 1
Applications....................................................................................... 1
General Description ......................................................................... 1
Functional Block Diagram .............................................................. 1
Product Highlights ........................................................................... 1
Revision History ............................................................................... 2
Specifications..................................................................................... 4
DC Specifications ......................................................................... 4
LVDS Digital Specifications........................................................ 5
Serial Port Specifications............................................................. 6
AC Specifications.......................................................................... 7
Absolute Maximum Ratings............................................................ 8
Thermal Resistance ...................................................................... 8
ESD Caution.................................................................................. 8
Pin Configurations and Function Descriptions ........................... 9
Typical Performance Characteristics ........................................... 12
AC (Normal Mode).................................................................... 12
AC (Mix Mode) ..........................................................................15
Terminology .................................................................................... 17
Serial Port Interface (SPI) Register............................................... 18
SPI Register Map Description................................................... 18
SPI Operation.............................................................................. 18
SPI Register Map............................................................................. 20
SPI Port Configuration and Software Reset............................ 22
Power-Down LVDS Interface and TxDAC®............................ 22
Controller Clock Disable........................................................... 22
Interrupt Request (IRQ) Enable/Status ................................... 22
TxDAC Full-Scale Current Setting (I
TxDAC Quad-Switch Mode of Operation.............................. 23
) and Sleep ........... 23
OUTFS
DCI Phase Alignment Status .................................................... 23
SYNC_IN Phase Alignment Status.......................................... 23
Data Receiver Controller Configuration................................. 23
Data Receiver Controller_Data Sample Delay Value ............ 24
Data and Sync Receiver Controller_DCI Delay
Value/Window and Phase Rotation......................................... 24
Data Receiver Controller_Delay Line Status and Sync
Controller SYNC_OUT Status ................................................. 24
Sync and Data Receiver Controller Lock/Tracking Status.... 25
CLK Input Common Mode ...................................................... 25
Mu Controller Configuration and Status................................ 25
Part ID ......................................................................................... 26
Theory of Operation ...................................................................... 27
LVDS Data Port Interface.......................................................... 28
Mu Controller............................................................................. 32
Interrupt Requests...................................................................... 34
Multiple Device Synchronization............................................. 35
Analog Interface Considerations.................................................. 38
Analog Modes of Operation ..................................................... 38
Clock Input Considerations...................................................... 39
Voltage Reference ....................................................................... 40
Analog Outputs .......................................................................... 40
Nonideal Spectral Artifacts....................................................... 43
Lab Evaluation of the AD9739 ................................................. 44
Power Dissipation and Supply Domains................................. 44
Recommended Start-Up Sequence.......................................... 45
Outline Dimensions....................................................................... 48
Ordering Guide .......................................................................... 48
REVISION HISTORY
1/12—Rev. A to Rev. B
Changes to Features Section, Applications Section, General
Description Section, Figure 1, Product Highlights Section ........ 1
Changes to DC Specifications Section........................................... 4
Changed Digital Specifications Section to LVDS Digital
Specifications Section....................................................................... 5
Changes to LVDS Digital Specifications Section ......................... 5
Added Serial Port Specifications Section and Table 3;
Renumbered Sequentially................................................................ 6
Changes to AC Specifications Section........................................... 7
Changes to Table 5............................................................................ 8
Changes to Table 7.......................................................................... 10
Rev. B | Page 2 of 48
Deleted Static Linearity Section and Figure 7 to Figure 17;
Renumbered Sequentially ............................................................. 11
Changed Dynamic Performance Normal Mode, 20 mA Full
Scale (Unless Otherwise Noted) Section to AC (Normal Mode)
Section.............................................................................................. 12
Changes to AC (Normal Mode) Section ..................................... 12
Changed Dynamic Performance Mix Mode, 20 mA Full Scale
Section to AC (Mix Mode) Section.............................................. 15
Changes to AC (Mix Mode) Section............................................ 15
Added Serial Port Interface (SPI) Register Section, SPI Register
Map Description Section, Reset Section, Table 8, and SPI
Operation Section and Figure 34 ................................................. 18

Data Sheet AD9739
Deleted DOCSIS Performance Section and
Figure 46 to Figure 72.....................................................................19
Added Figure 35 through Figure 38; Renumbered Sequentially.... 19
Changes to SPI Register Map Section and Table 9......................20
Added SPI Port Configuration and Software Reset Section,
Power-Down LVDS Interface and TxDAC® Section, Controller
Clock Disable Section, Interrupt Request (IRQ) Enable/Status
Section, and Table 10 to Table 13 ..................................................22
Added TxDAC Full-Scale Current Setting (I
) and Sleep
OUTFS
Section, TxDAC Quad-Switch Mode of Operation Section, DCI
Phase Alignment Status Section, SYNC_IN Phase Alignment
Status Section, Data Receiver Controller Configuration Section,
and Table 14 to Table 18 .................................................................23
Added Data Receiver Controller_Data Sample Delay Value
Section, Data and Sync Receiver Controller_DCI Delay
Value/Window and Phase Rotation Section, Data Receiver
Controller_Delay Line Status and Sync Controller SYNC_OUT
Status Section, and Table 19 to Table 21.......................................24
Deleted Serial Peripheral Interface Section, General Operation
of the Serial Interface Section, Instruction Mode (8-Bit Instruction)
Section, and Serial Interface Port Pin Description Section .......25
Added Sync and Data Receiver Controller Lock/Tracking Status
Section, CLK Input Common Mode Section, Mu Controller
Configuration and Status Section, and Table 22 to Table 24.....25
Deleted MSB/LSB Transfers Section, Serial Port Configuration
Section, and Figure 74 to Figure 79 ..............................................26
Added Part ID Section and Table 25 ............................................26
Changes to Theory of Operation Section ....................................27
Added Figure 39 ..............................................................................27
Deleted SPI Registers Section and Table 8 to Table 31...............28
Moved and Changes to LVDS Data Port Interface Section .......28
Added Figure 40 and Figure 41 .....................................................28
Changes to Figure 42 ......................................................................29
Moved and Changes to Figure 43..................................................29
Added Data Receiver Controller Initialization Description
Section, Table 26, and Data Receiver Operation at Lower Clock
Rates Section ....................................................................................30
Added LVDS Driver and Receiver Input Section, Figure 44 to
Figure 47, and Table 27...................................................................31
Changed and Moved Mu Delay Controller Section to Mu
Controller Section...........................................................................32
Changes to Mu Controller Section, Figure 48, and Figure 49...32
Added Figure 50 and Table 28 .......................................................32
Added Mu Controller Initialization Description Section..........33
Changes to Interrupt Requests Section........................................34
Added Table 29 ................................................................................34
Changed Synchronization Controller Section to Multiple
Device Synchronization Section....................................................35
Added Figure 52 ..............................................................................35
Changes to Figure 53 ......................................................................36
Added Sync Controller Initialization Description Section........36
Added Synchronization Limitations Section...............................37
Changed Applications Information to Analog Interface
Considerations Section...................................................................38
Changes to Analog Modes of Operation Section .......................38
Deleted Clocking the AD9739 Section, Figure 85, and Figure 86..39
Added Clock Input Considerations Section, Figure 58 to
Figure 60...........................................................................................39
Deleted Clock Phase Noise Affects on AC Performance Section,
Table 32 to Table 34, Applying Data to the AD9739 Section, and
Figure 87...........................................................................................40
Moved Figure 61..............................................................................40
Changes to Voltage References Section and Analog Outputs
Section ..............................................................................................40
Added Equivalent DAC Output and Transfer Function and
Figure 63...........................................................................................40
Deleted Mu Control Operation Section, Search Mode Section,
and Figure 89 ................................................................................... 41
Moved Figure 64..............................................................................41
Added Peak DAC Output Power Capability Section and Figure 65. 41
Deleted Figure 90, Figure 91, Track Mode Section, Mu Delay
and Phase Readback Section, Operating the Mu Controller
Manually Section, and Calculating Mu Delay Line Step Size
Section ..............................................................................................42
Added Output Stage Configuration Section and Figure 66 to
Figure 70...........................................................................................42
Added Nonideal Spectral Artifacts Section, Figure 71, and
Table 30.............................................................................................43
Deleted Operation in Master Mode, Figure 93, and
Figure 94...........................................................................................44
Added Lab Evaluation of the AD9739 Section, Power Dissipation
and Supply Domains Section, and Figure 72 to Figure 74......... 44
Deleted Figure 95, Operation in Slave Mode Section, and Data
Receiver Operation in Auto Mode Section.................................. 45
Changes to Recommended Start-Up Sequence Section ............45
Added Figure 75..............................................................................45
Deleted Figure 97, Data Receiver Operation in Manual Mode
Section, Calculating the DCI Delay Line Step Size Section, and
Maximum Allowable Data Timing Skew/Jitter Section.............46
Added Table 31 ................................................................................ 46
Deleted Optimizing the Clock Common-Mode Voltage Section,
Figure 99, Analog Control Registers Section, Mirror Roll-Off
Frequency Control Section, and Figure 101................................47
Added Table 32 ................................................................................ 47
Deleted Figure 103, Figure 104, and Figure 106 .........................48
Updated Outline Dimensions........................................................48
Deleted Figure 107 to Figure 109..................................................49
Deleted Table 35 to Table 44.......................................................... 50
7/11—Rev 0 to Rev A
Changes to Table 2, DAC CLOCK INPUT (DACCLK_P,
DACCLK_N), Added DAC Clock Rate .........................................4
Changes to Table 3, Added Dynamic Performance Parameters....... 5
Change to Ordering Guide ............................................................ 53
2/09—Revision 0: Initial Release
Rev. B | Page 3 of 48
AD9739 Data Sheet
SPECIFICATIONS
DC SPECIFICATIONS
VDDA = VDD33 = 3.3 V, VDDC = VDD = 1.8 V, I
Table 1.
Parameter Min Typ Max Unit
RESOLUTION 14 Bits
ACCURACY
Integral Nonlinearity (INL) ±1.3 LSB
Differential Nonlinearity (DNL) ±0.8 LSB
ANALOG OUTPUTS
Gain Error (with Internal Reference) 5.5 %
Full-Scale Output Current 8.66 20.2 31.66 mA
Output Compliance Range −1.0 +1.0 V
Common-Mode Output Resistance 10 MΩ
Differential Output Resistance 70 Ω
Output Capacitance 1 pF
DAC CLOCK INPUT (DACCLK_P, DACCLK_N)
Differential Peak-to-Peak Voltage 1.2 1.6 2.0 V
Common-Mode Voltage 900 mV
DAC Clock Rate 0.8 2.5 GHz
TEMPERATURE DRIFT
Gain 60 ppm/°C
Reference Voltage 20 ppm/°C
REFERENCE
Internal Reference Voltage 1.15 1.2 1.25 V
Output Resistance 5 kΩ
ANALOG SUPPLY VOLTAGES
VDDA 3.1 3.3 3.5 V
VDDC 1.70 1.8 1.90 V
DIGITAL SUPPLY VOLTAGES
VDD33 3.10 3.3 3.5 V
VDD 1.70 1.8 1.90 V
SUPPLY CURRENTS AND POWER DISSIPATION, 2.0 GSPS
I
37 38 mA
VDDA
I
159 166 mA
VDDC
I
34 37 mA
VDD33
I
233 238 mA
VDD
Power Dissipation 0.940 0.975 W
Sleep Mode, I
2.5 2.75 mA
VDDA
Power-Down Mode (Register 0x01 = 0x33 and Register 0x02 = 0x80)
I
0.02 mA
VDDA
I
3.8 mA
VDDC
I
0.5 mA
VDD33
I
0.1 mA
VDD
SUPPLY CURRENTS AND POWER DISSIPATION, 2.5 GSPS
I
37 mA
VDDA
I
223 mA
VDDC
I
34 mA
VDD33
I
290 mA
VDD
Power Dissipation 1.16 W
OUTFS
= 20 mA.
Rev. B | Page 4 of 48
Data Sheet AD9739
LVDS DIGITAL SPECIFICATIONS
VDDA = VDD33 = 3.3 V, VDDC = VDD = 1.8 V, I
1996 reduced range link, unless otherwise noted.
Table 2.
Parameter Min Typ Max Unit
LVDS DATA INPUTS (DB0[13:0], DB1[13:0])1
Input Common-Mode Voltage Range, V
Logic High Differential Input Threshold, V
Logic Low Differential Input Threshold, V
825 1575 mV
COM
175 400 mV
IH_DTH
−175 −400 mV
IL_DTH
Receiver Differential Input Impedance, RIN 80 120 Ω
Input Capacitance 1.2 pF
LVDS Input Rate 1250 MSPS
LVDS Minimum Data Valid Period, t
(See Figure 41) 344 ps
VALI D
LVDS CLOCK INPUT (DCI and SYNC_IN)2
Input Common-Mode Voltage Range, V
Logic High Differential Input Threshold, V
Logic Low Differential Input Threshold, V
825 1575 mV
COM
175 400 mV
IH_DTH
−175 −400 mV
IL_DTH
Receiver Differential Input Impedance, RIN 80 120 Ω
Input Capacitance 1.2 pF
Maximum Clock Rate 625 MHz
LVDS CLOCK OUTPUT (DCO and SYNC_OUT)3
Output Voltage High (x_P or x_N) 1375 mV
Output Voltage Low (x_P or x_N) 1025 mV
Output Differential Voltage, |VOD| 150 200 250 mV
Output Offset Voltage, VOS 1150 1250 mV
Output Impedance, Single-Ended, RO 80 100 120 Ω
RO Single-Ended Mismatch 10 %
Maximum Clock Rate 625 MHz
1
DB0[x]P, DB0[x]N, DB1[x]P, and DB1[x]N pins.
2
DCI_P and DCI_N pins, as well as SYNC_IN_P and SYNC_IN_N pins.
3
DCO_P and DCO_N pins, as well as SYNC_OUT_P/SYNC_OUT_N pins with 100 Ω differential termination.
= 20 mA. LVDS drivers and receivers are compliant to the IEEE Standard 1596.3-
OUTFS
Rev. B | Page 5 of 48
AD9739 Data Sheet
SERIAL PORT SPECIFICATIONS
VDDA = VDD33 = 3.3 V, VDDC = VDD = 1.8 V.
Tabl e 3
.
Parameter Min Typ Max Unit
WRITE OPERATION (See Figure 36)
SCLK Clock Rate, f
SCLK Clock High, tHI 18 ns
SCLK Clock Low, t
SDIO to SCLK Setup Time, tDS 2 ns
SCLK to SDIO Hold Time, tDH 1 ns
CS to SCLK Setup Time, tS
SCLK to CS Hold Time, tH
READ OPERATION (See Figure 37 and Figure 38)
SCLK Clock Rate, f
SCLK Clock High, tHI 18 ns
SCLK Clock Low, t
SDIO to SCLK Setup Time, tDS 2 ns
SCLK to SDIO Hold Time, tDH 1 ns
CS to SCLK Setup Time, tS
SCLK to SDIO (or SDO) Data Valid Time, tDV 15 ns
CS to SDIO (or SDO) Output Valid to High-Z, tEZ
INPUTS (SDIO, SCLK, CS)
Voltage in High, VIH 2.0 3.3 V
Voltage in Low, VIL 0 0.8 V
Current in High, IIH −10 +10 μA
Current in Low, IIL −10 +10 μA
OUTPUT (SDIO)
Voltage Out High, VOH 2.4 3.5 V
Voltage Out Low, VOL 0 0.4 V
Current Out High, IOH 4 mA
Current Out Low, IOL 4 mA
(or /t
SCLK
18 ns
LOW
) 20 MHz
SCLK
3 ns
2 ns
(or /t
SCLK
18 ns
LOW
) 20 MHz
SCLK
3 ns
2 ns
Rev. B | Page 6 of 48
Data Sheet AD9739
AC SPECIFICATIONS
VDDA = VDD33 = 3.3 V, VDDC = VDD = 1.8 V, I
Table 4.
Parameter Min Typ Max Unit
DYNAMIC PERFORMANCE
DAC Clock Rate 800 2500 MSPS
Adjusted DAC Update Rate1 800 2500 MSPS
Output Settling Time (tst) to 0.1% 13 ns
SPURIOUS-FREE DYNAMIC RANGE (SFDR)
f
= 100 MHz 69.5 dBc
OUT
f
= 350 MHz 58.5 dBc
OUT
f
= 550 MHz 54 dBc
OUT
f
= 950 MHz 60 dBc
OUT
TWO-TONE INTERMODULATION DISTORTION (IMD), f
f
= 100 MHz 94 dBc
OUT
f
= 350 MHz 78 dBc
OUT
f
= 550 MHz 72 dBc
OUT
f
= 950 MHz 68 dBc
OUT
NOISE SPECTRAL DENSITY (NSD), 0 dBFS SINGLE TONE
f
= 100 MHz −166 dBm/Hz
OUT
f
= 350 MHz −161 dBm/Hz
OUT
f
= 550 MHz −160 dBm/Hz
OUT
f
= 850 MHz −160 dBm/Hz
OUT
WCDMA ACLR (SINGLE CARRIER), ADJACENT/ALTERNATE ADJACENT CHANNEL
f
= 2457.6 MSPS f
DAC
f
= 2457.6 MSPS, f
DAC
f
= 2457.6 MSPS, f
DAC
f
= 2457.6 MSPS, f
DAC
1
Adjusted DAC updated rate is calculated as f
with f
= 2500 MSPS, f
DAC
= 350 MHz 80/80 dBc
OUT
= 950 MHz 78/79 dBc
OUT
= 1700 MHz (Mix Mode) 74/74 dBc
OUT
= 2100 MHz (Mix Mode) 69/72 dBc
OUT
divided by the minimum required interpolation factor. For the AD9739, the minimum interpolation factor is 1. Thus,
adjusted = 2500 MSPS.
DAC
DAC
= 20 mA, f
OUTFS
= f
OUT2
= 2400 MSPS.
DAC
+ 1.25 MHz
OUT1
Rev. B | Page 7 of 48
AD9739 Data Sheet
ABSOLUTE MAXIMUM RATINGS
Table 5.
With
Parameter
VDDA VSSA −0.3 V to +3.6 V
VDD33 VSS −0.3 V to +3.6 V
VDD VSS −0.3 V to +1.98 V
VDDC VSSC −0.3 V to +1.98 V
VSSA VSS −0.3 V to +0.3 V
VSSA VSSC −0.3 V to +0.3 V
VSS VSSC −0.3 V to +0.3 V
DACCLK_P, DACCLK_N VSSC −0.3 V to VDDC + 0.18 V
DCI, DCO, SYNC_IN,
SYNC_OUT
LVDS Data Inputs VSS −0.3 V to VDD33 + 0.3 V
IOUTP, IOUTN VSSA −1.0 V to VDDA + 0.3 V
I120, VREF VSSA −0.3 V to VDDA + 0.3 V
IRQ, CS, SCLK, SDO,
SDIO, RESET
Junction Temperature 150°C
Storage Temperature −65°C to +150°C
Respect To
VSS −0.3 V to VDD33 + 0.3 V
VSS −0.3 V to VDD33 + 0.3 V
Rating
Stresses above those listed under Absolute Maximum Ratings
may cause permanent damage to the device. This is a stress
rating only; functional operation of the device at these or any
other conditions above those indicated in the operational
section of this specification is not implied. Exposure to absolute
maximum rating conditions for extended periods may affect
device reliability.
THERMAL RESISTANCE
θJA is specified for the worst-case conditions, that is, a device
soldered in a circuit board for surface-mount packages.
Table 6. Thermal Resistance
Package Type θJA θ
160-Ball CSP_BGA 31.2 7.0 °C/W1
1
With no airflow movement.
Unit
JC
ESD CAUTION
Rev. B | Page 8 of 48
Data Sheet AD9739
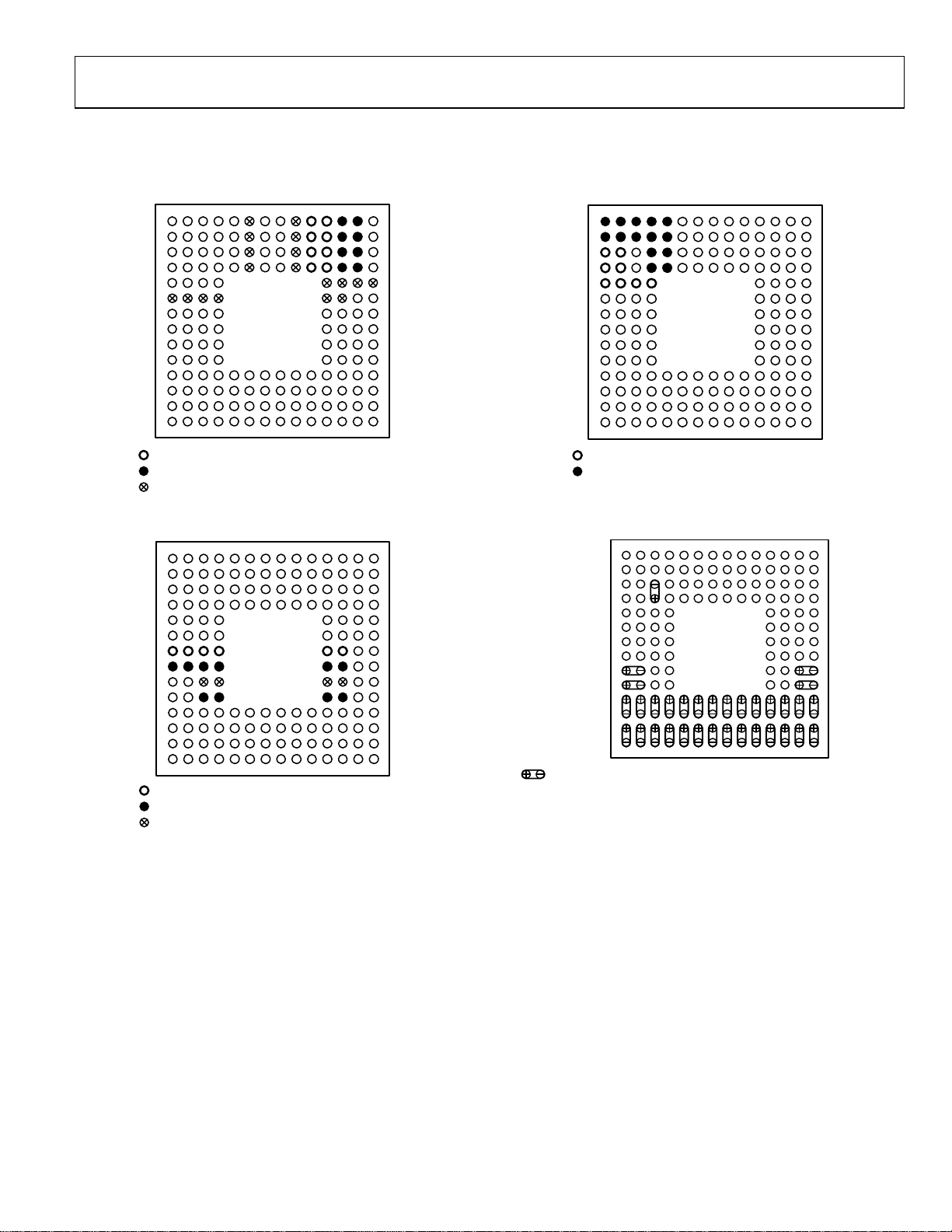
PIN CONFIGURATIONS AND FUNCTION DESCRIPTIONS
1413121110876321954
1413121110876321954
A
B
C
D
E
F
G
H
J
K
L
M
N
P
VDDA, 3.3V, ANALOG SUPPLY
VSSA, ANALOG SUPPLY GROUND
VSSA SHIELD, ANALOG SUPPLY GROUND SHIE LD
Figure 2. Analog Supply Pins (Top View)
A
B
C
D
E
F
G
H
J
K
L
M
N
P
VDD, 1.8V, DIGITAL SUPPLY
VSS DIGITAL SUPPLY GROUND
VDD33, 3.3V DIGITAL SUPPLY
Figure 3. Digital Supply Pins (Top View)
A
B
C
D
E
F
G
H
J
K
L
M
N
P
VDDC, 1.8V, CLOCK SUPPLY
VSSC, CLOCK SUPPLY GROUND
07851-002
07851-004
Figure 4. Digital LVDS Clock Supply Pins (Top View)
1413121110876321954
A
B
DACCLK_N
DACCLK_ P
SYNC_OUT_P/_N
SYNC_IN_P/_N
DB1[0:13]P
DB1[0:13]N
DB0[0:13]P
DB0[0:13]N
07851-003
C
D
E
F
G
H
J
K
L
M
N
P
DIFFERENTIAL INPUT SIGNAL (CLOCK OR DATA)
Figure 5. Digital LVDS Input, Clock I/O (Top View)
1413121110876321954
DCO_P/_N
DCI_P/_N
07851-005
Rev. B | Page 9 of 48
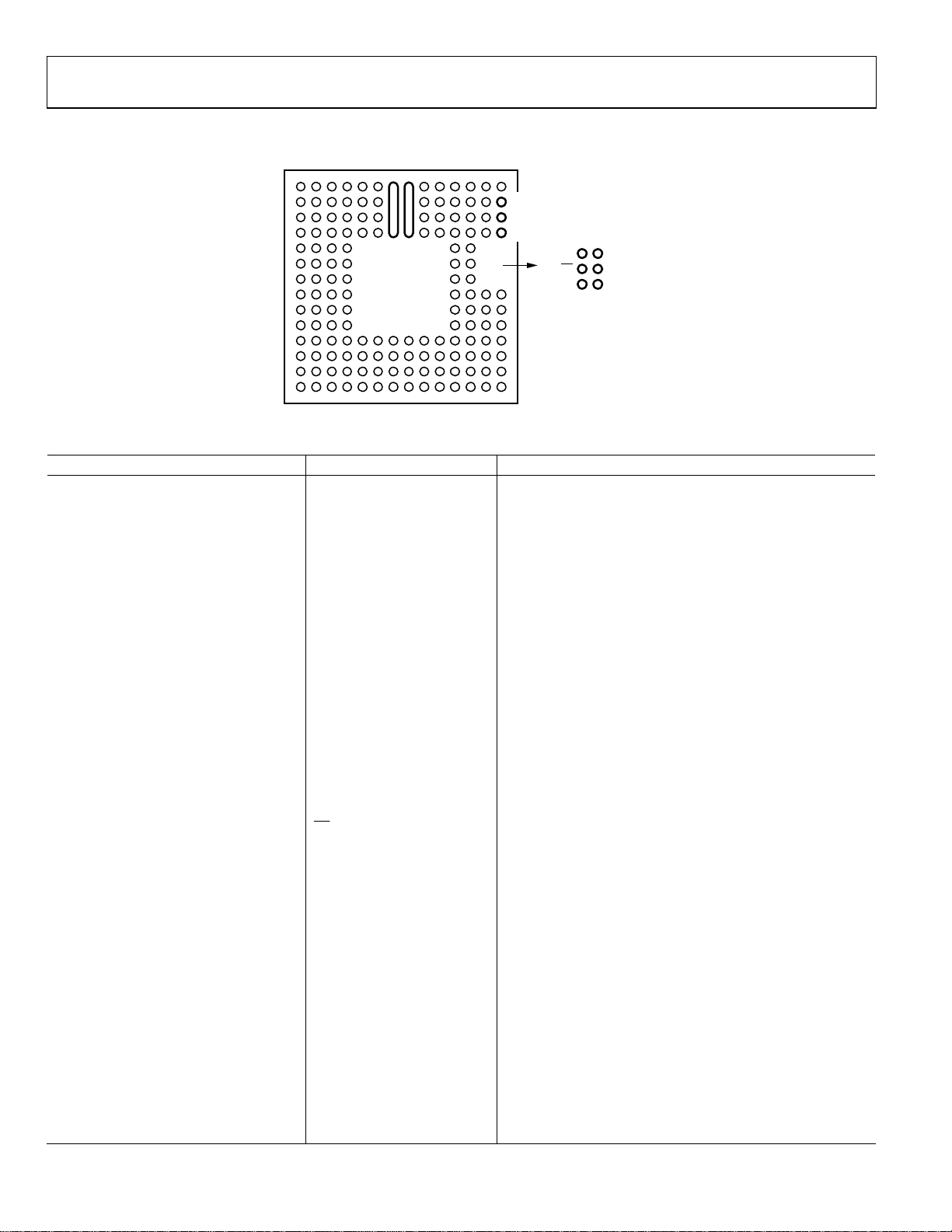
AD9739 Data Sheet
IOUTN
IOUTP
1413121110876321954
A
B
C
D
E
F
G
H
J
K
L
M
N
P
Figure 6. Analog I/O and SPI Control Pins (Top View)
I120
VREF
IPTAT
IRQ
SCLK
CS
RESET
SDIO
SDO
07851-006
Table 7. AD9739 Pin Function Descriptions
Pin No. Mnemonic Description
C1, C2, D1, D2, E1, E2, E3, E4 VDDC 1.8 V Clock Supply Input.
A1, A2, A3, A4, A5, B1, B2, B3, B4, B5, C4,
VSSC
Clock Supply Return.
C5, D4, D5
A10, A11, B10, B11, C10, C11, D10, D11 VDDA
A12, A13, B12, B13, C12, C13, D12, D13, VSSA
A6, A9, B6, B9, C6, C9, D6, D9, F1, F2, F3,
VSSA Shield
3.3 V Analog Supply Input.
Analog Supply Return.
Analog Supply Return Shield. Tie to VSSA at the DAC.
F4, E11, E12, E13, E14, F11, F12
A14 NC
A7, B7, C7, D7 IOUTN
A8, B8, C8, D8 IOUTP
B14 I120
No Connect. Do not connect to this pin.
DAC Negative Current Output Source.
DAC Positive Current Output Source.
Nominal 1.2 V Reference. Tie to analog ground via a 10 kΩ
resistor to generate a 120 μA reference current.
C14 VREF
Voltage Reference Input/Output. Decouple to VSSA with a
1 nF capacitor.
D14 NC
C3, D3 DACCLK_N/DACCLK_P
F13 IRQ
Factory Test Pin. Do not connect to this pin.
Negative/Positive DAC Clock Input (DACCLK).
Interrupt Request Open Drain Output. Active high. Pull up to
VDD33 with a 10 kΩ resistor.
F14 RESET
G13
CS
G14 SDIO
H13 SCLK
H14 SDO
J3, J4, J11, J12 VDD33
G1, G2, G3, G4, G11, G12 VDD
H1, H2, H3, H4, H11, H12, K3, K4, K11, K12 VSS
J1, J2 SYNC_OUT_P/SYNC_OUT_N
K1, K2 SYNC_IN_P/SYNC_IN_N
J13, J14 DCO_P/DCO_N
K13, K14 DCI_P/DCI_N
L1, M1 DB1[0]P/DB1[0]N
L2, M2 DB1[1]P/DB1[1]N
L3, M3 DB1[2]P/DB1[2]N
L4, M4 DB1[3]P/DB1[3]N
L5, M5 DB1[4]P/DB1[4]N
Reset Input. Active high. Tie to VSS if unused.
Serial Port Enable Input.
Serial Port Data Input/Output.
Serial Port Clock Input.
Serial Port Data Output.
3.3 V Digital Supply Input.
1.8 V Digital Supply. Input.
Digital Supply Return.
Positive/Negative SYNC Output (SYNC_OUT)
Positive/Negative SYNC Input (SYNC_IN)
Positive/Negative Data Clock Output (DCO).
Positive/Negative Data Clock Input (DCI).
Port 1 Positive/Negative Data Input Bit 0.
Port 1 Positive/Negative Data Input Bit 1.
Port 1 Positive/Negative Data Input Bit 2.
Port 1 Positive/Negative Data Input Bit 3.
Port 1 Positive/Negative Data Input Bit 4.
L6, M6 DB1[5]P/DB1[5]N Port 1 Positive/Negative Data Input Bit 5.
Rev. B | Page 10 of 48
Data Sheet AD9739
Pin No. Mnemonic Description
L7, M7 DB1[6]P/DB1[6]N Port 1 Positive/Negative Data Input Bit 6.
L8, M8 DB1[7]P/DB1[7]N Port 1 Positive/Negative Data Input Bit 7.
L9, M9 DB1[8]P/DB1[8]N Port 1 Positive/Negative Data Input Bit 8.
L10, M10 DB1[9]P/DB1[9]N Port 1 Positive/Negative Data Input Bit 9.
L11, M11 DB1[10]P/DB1[10]N Port 1 Positive/Negative Data Input Bit 10.
L12, M12 DB1[11]P/DB1[11]N Port 1 Positive/Negative Data Input Bit 11.
L13, M13 DB1[12]P/DB1[12]N Port 1 Positive/Negative Data Input Bit 12.
L14, M14 DB1[13]P/DB1[13]N Port 1 Positive/Negative Data Input Bit 13.
N1, P1 DB0[0]P/DB0[0]N Port 0 Positive/Negative Data Input Bit 0.
N2, P2 DB0[1]P/DB0[1]N Port 0 Positive/Negative Data Input Bit 1.
N3, P3 DB0[2]P/DB0[2]N Port 0 Positive/Negative Data Input Bit 2.
N4, P4 DB0[3]P/DB0[3]N Port 0 Positive/Negative Data Input Bit 3.
N5, P5 DB0[4]P/DB0[4]N Port 0 Positive/Negative Data Input Bit 4.
N6, P6 DB0[5]P/DB0[5]N Port 0 Positive/Negative Data Input Bit 5.
N7, P7 DB0[6]P/DB0[6]N Port 0 Positive/Negative Data Input Bit 6.
N8, P8 DB0[7]P/DB0[7]N Port 0 Positive/Negative Data Input Bit 7.
N9, P9 DB0[8]P/DB0[8]N Port 0 Positive/Negative Data Input Bit 8.
N10, P10 DB0[9]P/DB0[9]N Port 0 Positive/Negative Data Input Bit 9.
N11, P11 DB0[10]P/DB0[10]N Port 0 Positive/Negative Data Input Bit 10.
N12, P12 DB0[11]P/DB0[11]N Port 0 Positive/Negative Data Input Bit 11.
N13, P13 DB0[12]P/DB0[12]N Port 0 Positive/Negative Data Input Bit 12.
N14, P14 DB0[13]P/DB0[13]N Port 0 Positive/Negative Data Input Bit 13.
Rev. B | Page 11 of 48
AD9739 Data Sheet
–
–
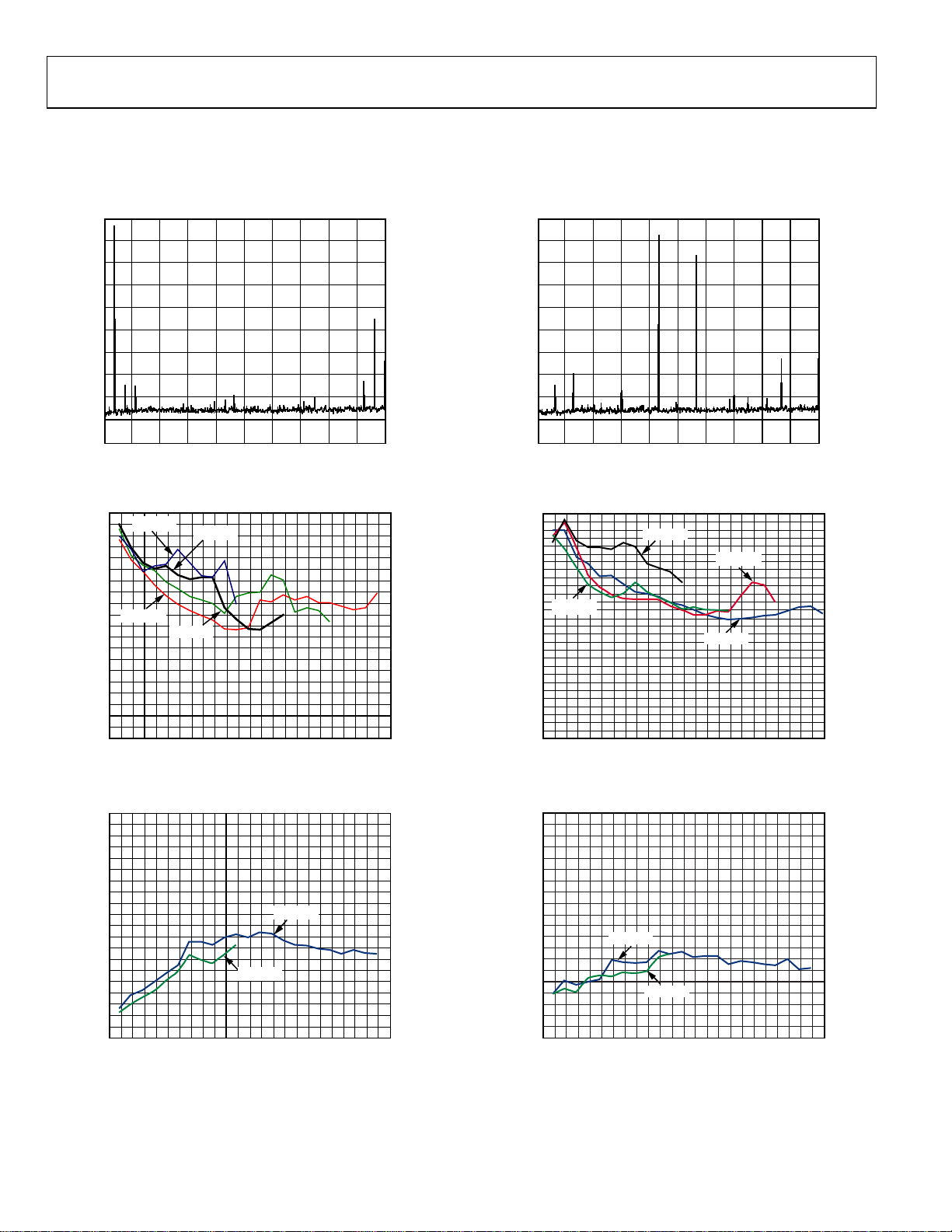
TYPICAL PERFORMANCE CHARACTERISTICS
AC (NORMAL MODE)
I
= 20 mA, nominal supplies, 25°C, unless otherwise noted.
OUTFS
10dB/DIV
Figure 7. Single-Tone Spectrum at f
80
1.2GSPS
75
70
65
60
2.4GSPS
55
50
SFDR (dBc)
45
40
35
30
0 100 200 300 400 500 60 0 700 800 900 1000 1100 1200
2.0GSPS
Figure 8. SFDR vs. f
150
–152
–154
–156
–158
–160
–162
NSD (dBm/Hz)
–164
–166
–168
–170
0 100 200 300 400 500 600 700 800 900 1000 1100 1200
Figure 9. Single-Tone NSD over f
VBW 10kHz
1.6GSPS
f
f
OUT
OUT
OUT
(MHz)
OUT
1.2GSPS
(MHz)
= 91 MHz, f
over f
DAC
2.4GSPS
OUT
STOP 2.4GHzSTART 20MHz
= 2.4 GSPS
DAC
10dB/DIV
STOP 2.4GHzSTART 20MHz
2.4GSPS
VBW 10kHz
1.2GSPS
f
OUT
1.2GSPS
f
OUT
= 1091 MHz, f
OUT
2.4GSPS
(MHz)
over f
OUT
(MHz)
2.0GSPS
DAC
OUT
DAC
= 2.4 GSPS
1100 1200
07851-010
07851-011
07851-012
07851-007
Figure 10. Single-Tone Spectrum at f
100
95
90
85
80
75
1.6GSPS
70
65
60
IMD (dBc)
55
50
45
40
35
30
0 100 200 300 400 500 600 700 800 900 1000
07851-008
Figure 11. IMD vs. f
160
–161
–162
–163
–164
–165
–166
NSD (dBm/Hz)
–167
–168
–169
–170
0 100 200 300 400 500 600 700 800 900 1000 1100 1200
07851-009
Figure 12. Eight-Tone NSD over f
Rev. B | Page 12 of 48
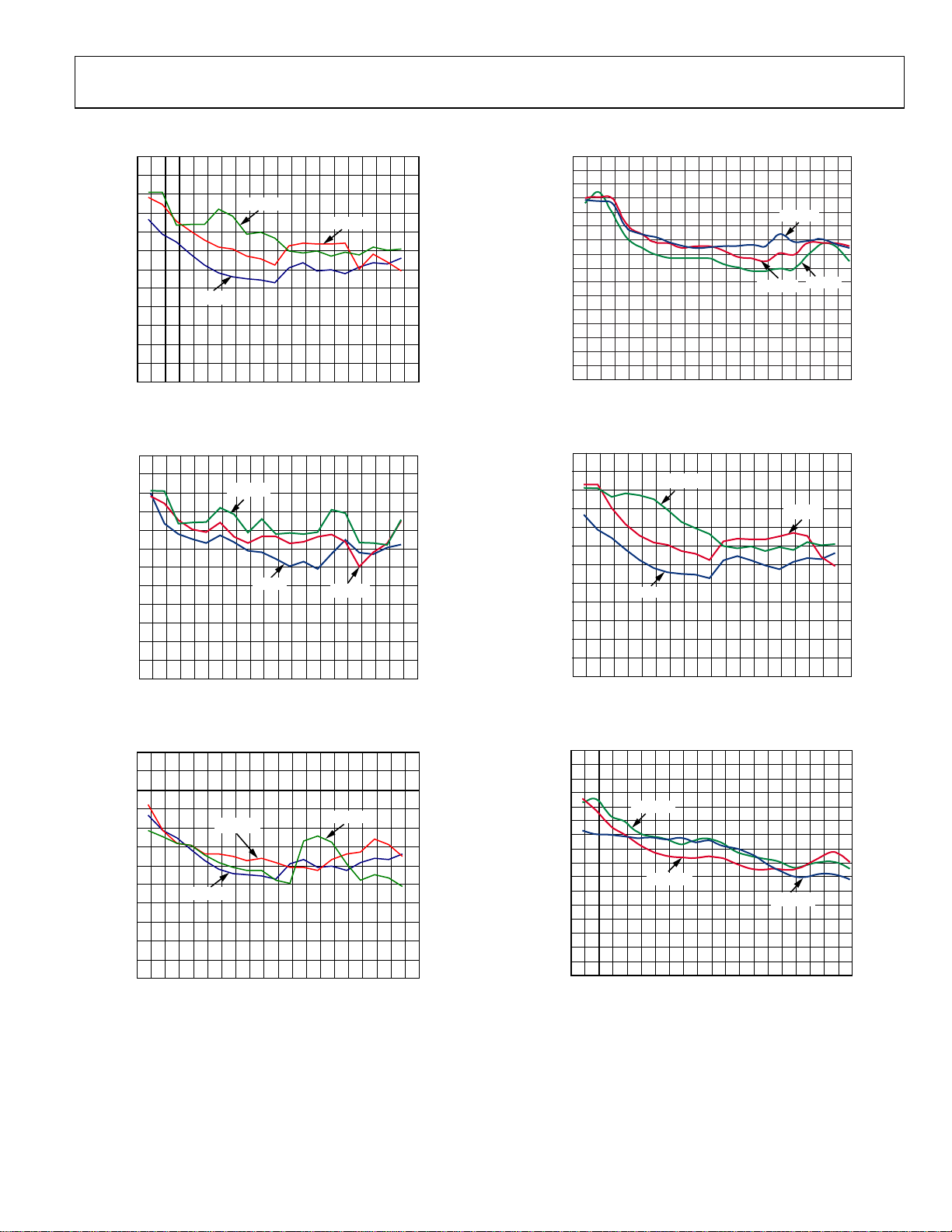
Data Sheet AD9739
f
= 2 GSPS, I
DAC
90
= 20 mA, nominal supplies, 25°C, unless otherwise noted.
OUTFS
110
80
70
60
SFDR (dBc)
50
40
30
0 100 200 300 400 500 600 700 800 900 1000
Figure 13. SFDR vs. f
90
80
70
60
SFDR (dB)
50
0dBFS
–6dBFS
f
(MHz)
OUT
over Digital Full Scale
OUT
–6dBFS
0dBFS
–3dBFS
–3dBFS
100
90
80
70
IMD (dBc)
60
50
40
30
0 100 200 300 400 500 600 700 800 900 1000
f
(MHz)
07851-013
Figure 16. IMD vs. f
90
80
70
60
SFDR (dB)
50
0dBFS
OUT
over Digital Full Scale
OUT
–6dBFS
–3dBFS
–6dBFS
–3dBFS
0dBFS
07851-016
40
30
0 100 200 300 400 500 600 700 800 900 1000
f
(MHz)
OUT
Figure 14. SFDR for Second Harmonic over f
90
80
70
60
SFDR (dBc)
50
40
30
0 100 200 300 400 500 600 700 800 900 1000
10mA FS
20mA FS
f
OUT
Figure 15. SFDR vs. f
(MHz)
OUT
vs. Digital Full Scale
OUT
30mA FS
over DAC I
OUTFS
40
30
0 100 200 300 400 500 600 700 800 900 1000
f
(MHz)
10mA FS
f
OUT
OUT
(MHz)
over DAC I
OUT
vs. Digital Full Scale
OUT
30mA FS
OUTFS
07851-014
Figure 17. SFDR for Third Harmonic over f
110
100
90
80
70
IMD (dBc)
60
50
40
30
0 100 200 300 400 500 600 700 800 900 1000
07851-015
20mA FS
Figure 18. IMD vs. f
7851-017
07851-018
Rev. B | Page 13 of 48
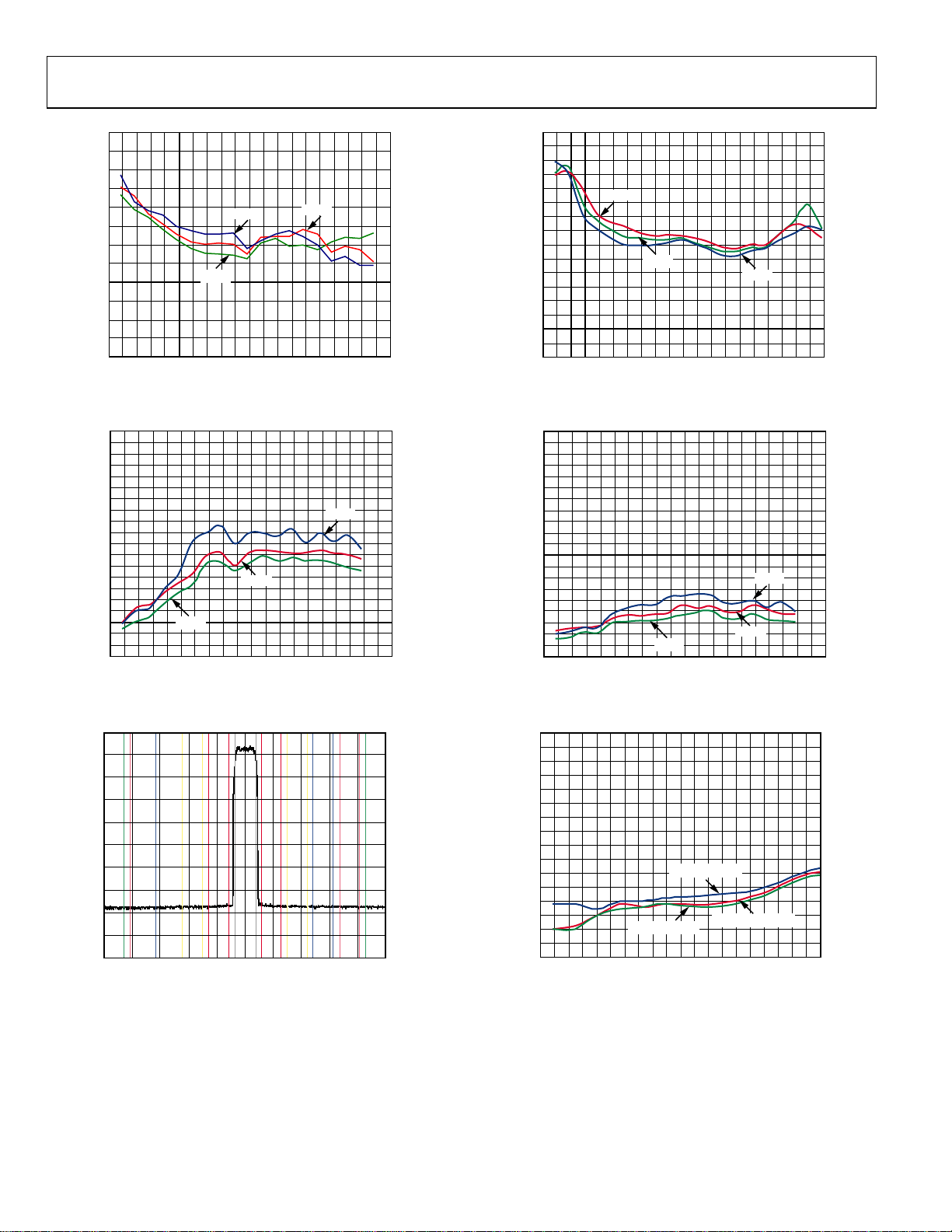
AD9739 Data Sheet
–
–
–
90
110
80
70
–40°C
+85°C
60
SFDR (dBc)
50
+25°C
40
30
0 100 200 300 400 500 600 700 800 900 1000
f
(MHz)
OUT
Figure 19. SFDR vs. f
over Temperature
OUT
150
–152
–154
–156
–158
–40°C
–160
–162
NSD (dBm/Hz)
–164
–166
–168
–170
0 200 400 600 800 1000100 300 500 700 900
+25°C
Figure 20. Single-Tone NSD vs. f
f
OUT
+85°C
(MHz)
over Temperature
OUT
100
90
+85°C
80
70
IMD (dBc)
60
+25°C
–40°C
50
40
30
0 100 200 300 400 500 600 700 800 900 1000
f
(MHz)
07851-019
Figure 22. IMD vs. f
OUT
over Temperature
OUT
07851-022
150
–152
–154
–156
–158
–160
–162
NSD (dBm/Hz)
–164
–40°C
–166
–168
–170
0 200 400 600 800 1000100 300 500 700 900
07851-020
+25°C
f
OUT
(MHz)
Figure 23. Eight-Tone NSD vs. f
+85°C
over Temperature
OUT
07851-023
50
10dB/DI V
CENTER 350. 27MHz
#RES BW 30kHz
RMS RESULTS
CARRIER POWER
–14.54dBm/
3.84MHz
FREQ
OFFSET
(MHz)
5
10
15
20
25
VBW 300kHz
REF
BW
(dBc)
(MHz)
–79.90
3.84
–80.60
3.84
–80.90
3.84
–80.62
3.84
–80.76
3.84
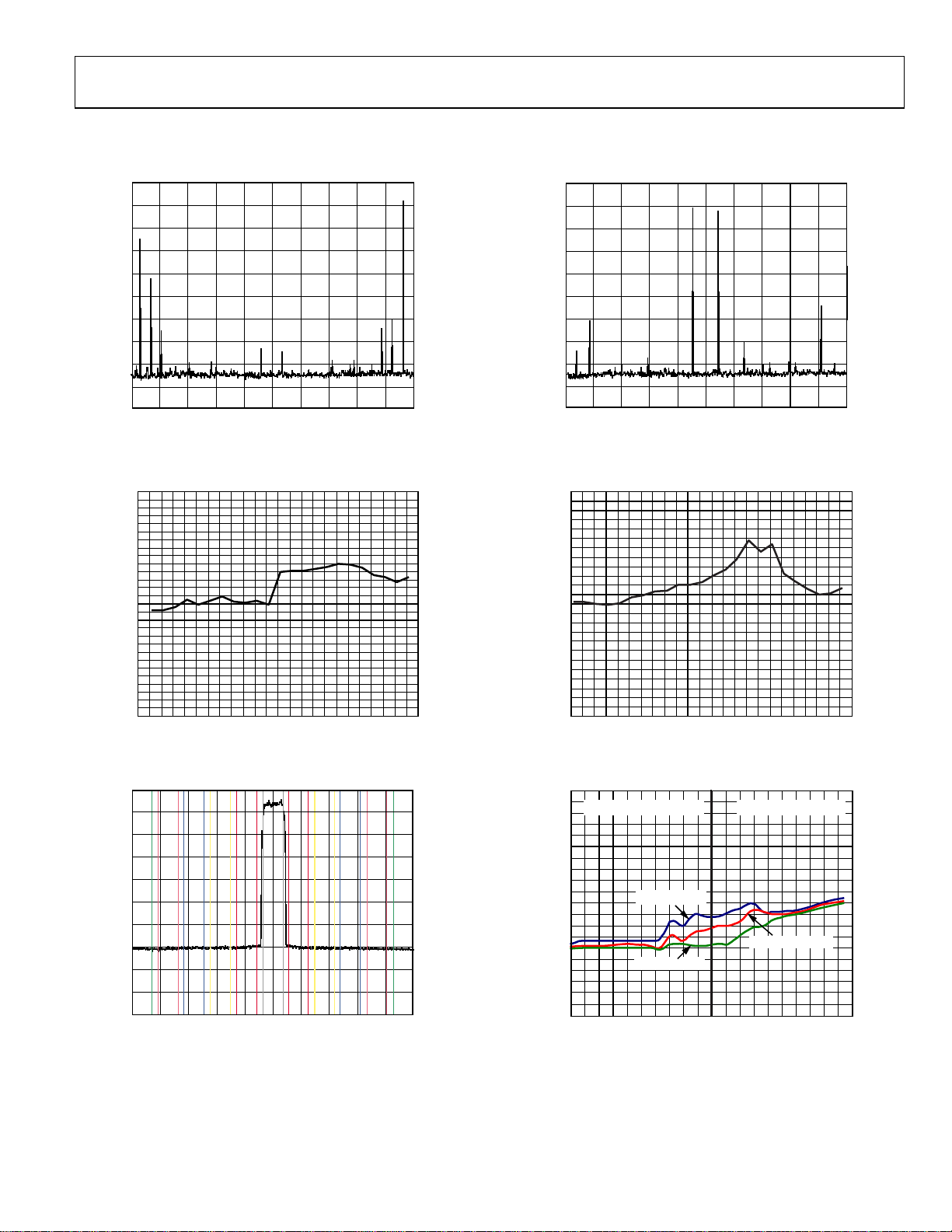
Figure 21. Single-Carrier WCDMA at 350 MHz, f
SPAN 53.84MHz
SWEEP 174.6ms (601pts)
(dBm)
–94.44
–95.14
–95.45
–95.16
–95.30
(dBc)
–79.03
–79.36
–80.73
–80.97
–80.95
UPPER
DAC
LOWER
(dBm)
–93.57
–94.40
–95.27
–95.51
–95.49
= 2457.6 MSPS
07851-021
Rev. B | Page 14 of 48
–55
–60
–65
–70
ACLR (dBc)
–75
FIRST ADJ CH
–80
–85
–90
0
245.76
122.88
FIFTH ADJ CH
491.52
368.64
f
OUT
614.40
(MHz)
737.28
Figure 24. Four-Carrier WCDMA at 350 MHz, f
SECOND ADJ CH
983.04
860.16
1105.90
= 2457.6 MSPS
DAC
1228.80
07851-024
Data Sheet AD9739
–
AC (MIX MODE)
f
= 2.4 GSPS, I
DAC
= 20 mA, nominal supplies, 25°C, unless otherwise noted.
OUTFS
10dB/DIV
START 20MHz
#RES BW 10kHz
VBW 10kHz
Figure 25. Single-Tone Spectrum at f
= 2.31 GHz, f
OUT
STOP 2.4GHz
SWEEP 28.7s (601pts)
= 2.4 GSPS
DAC
07851-025
80
75
70
65
60
55
50
45
40
SFDR (dBc)
35
30
25
20
15
10
1200 1300 1400 1500 1 600 1700 1800 1900 2000 2100 2200 2300 2400
f
(MHz)
OUT
Figure 26. SFDR in Mix Mode vs. f
10dB/DIV
CENTER 2.10706M Hz
#RES VW 30kHz
RMS RESULTS
CARRIER PO WER
–21.43dBm/
3.84MHz
FREQ
OFFSET
(MHz)
5
10
15
20
25
(MHz)
VBW 300kHz
REF
LOWER
BW
(dBc)
3.84
–68.99
3.84
–72.09
3.84
–72.86
3.84
–74.34
3.84
–74.77
at 2.4 GSPS
OUT
SPAN 53.84MHz
SWEEP 174.6ms (601pts)
UPPER
(dBm)
(dBc)
–63.94
–71.07
–71.34
–72.60
–73.26
(dBm)
–90.37
–92.50
–92.77
–94.03
–94.70
–90.43
–93.52
–94.30
–95.77
–96.20
07851-027
Figure 27. Typical Single-Carrier WCDMA ACLR Performance at 2.1 GHz,
= 2457.6 MSPS (Second Nyquist Zone)
f
DAC
Rev. B | Page 15 of 48
10dB/DIV
START 20MHz
#RES BW 10kHz
VBW 10kHz
Figure 28. Single-Tone Spectrum in Mix Mode at f
= 2.4 GSPS
f
DAC
90
85
80
75
70
65
60
55
IMD (dBc)
50
45
40
35
30
1200 1300 1400 1500 1600 1700 1800 1900 2000 2100 2200 2300 2400
f
(MHz)
07851-026
OUT
Figure 29. IMD in Mix Mode vs. f
40
SECOND NYQUI ST ZO NE THIRD NYQUIST ZONE
–45
–50
–55
–60
–65
–70
ACLR (dBc)
–75
–80
–85
–90
1229 1475 1720 1966 2212 2458 2703 2949 3195 3441 3686
FIRST ADJ CH
FIFTH ADJ CH
f
OUT
(MHz)
Figure 30. Single-Carrier WCDMA ACLR vs. f
STOP 2.4GHzSTART 20MHz STOP 2.4GHz
SWEEP 28.7s (601pts)
= 1.31 GHz,
OUT
at 2.4 GSPS
OUT
SECOND ADJ CH
at 2457.6 MSPS
OUT
07851-028
07851-029
07851-030

AD9739 Data Sheet
10dB/DIV
CENTER 2.807G Hz
#RES BW 30kHz
RMS RESULTS
CARRIER PO WER
–24.4dBm/
3.84MHz
FREQ
OFFSET
(MHz)
5
10
15
20
25
VBW 300kHz
REF
BW
(dBc)
(MHz)
–64.90
3.84
–66.27
3.84
–68.44
3.84
–70.20
3.84
–70.85
3.84
LOWER
–89.30
–90.67
–92.84
–94.60
–95.25
(dBm)
SPAN 53.84MHz
SWEEP 174.6ms (601pts)
UPPER
(dBm)
(dBc)
–88.22
–63.82
–90.10
–65.70
–90.95
–66.55
–93.35
–68.95
–94.85
–70.45
07851-031
Figure 31. Typical Single-Carrier WCDMA ACLR Performance at 2.8 GHz,
f
= 2457.6 MSPS (Third Nyquist Zone)
DAC
10dB/DIV
10dB/DIV
CENTER 2.81271GHz
#RES BW 30kHz
RMS RESULTS
CARRIER PO WER
–27.98dBm/
3.84MHz
FREQ
OFFSET
(MHz)
5
10
15
20
25
30
VBW 300kHz
REF
LOWER
BW
(MHz)
(dBc)
3.84
–0.42
3.84
–64.32
3.84
–66.03
3.84
–66.27
3.84
–66.82
3.84
–67.16
(dBm)
–28.40
–92.30
–94.01
–94.24
–94.79
–95.13
SPAN 63.84MHz
SWEEP 207ms (601p ts)
UPPER
(dBc)
(dBm)
–0.10
–28.07
–0.08
–28.06
–65.37
–93.34
–66.06
–94.03
–63.36
–93.34
–66.54
–94.51
Figure 33. Typical Four-Carrier WCDMA ACLR Performance at 2.8 GHz,
= 2457.6 MSPS (Third Nyquist Zone)
f
DAC
07851-033
CENTER 2.09758G Hz
#RES BW 30kHz
RMS RESULTS
CARRIER POWER
–25.53dBm/
3.84MHz
FREQ
OFFSET
(MHz)
5
10
15
20
25
30
VBW 300kHz
REF
LOWER
BW
(MHz)
(dBc)
3.84
0.22
3.84
–66.68
3.84
–68.01
3.84
–68.61
3.84
–68.87
3.84
–69.21
(dBm)
–25.31
–92.21
–93.53
–94.14
–94.40
–94.74
SPAN 63.84MHz
SWEEP 207ms ( 601pts)
UPPER
(dBc)
(dBm)
0.24
–25.29
0.14
–25.38
–66.82
–92.35
–67.83
–93.36
–67.64
–93.17
–68.50
–94.03
Figure 32. Typical Four-Carrier WCDMA ACLR Performance at 2.1 GHz,
= 2457.6 MSPS (Second Nyquist Zone)
f
DAC
07851-032
Rev. B | Page 16 of 48

Data Sheet AD9739
TERMINOLOGY
Linearity Error (Integral Nonlinearity or INL)
The maximum deviation of the actual analog output from the
ideal output, determined by a straight line drawn from 0 to
full scale.
Differential Nonlinearity (DNL)
The measure of the variation in analog value, normalized to full
scale, associated with a 1 LSB change in digital input code.
Monotonicity
A DAC is monotonic if the output either increases or remains
constant as the digital input increases.
Offset Error
The deviation of the output current from the ideal of 0 is called
the offset error. For IOUTP, 0 mA output is expected when the
inputs are all 0s. For IOUTN, 0 mA output is expected when all
inputs are set to 1.
Gain Error
The difference between the actual and ideal output span. The
actual span is determined by the output when all inputs are set
to 1 minus the output when all inputs are set to 0.
Output Compliance Range
The range of allowable voltage at the output of a current output
DAC. Operation beyond the maximum compliance limits may
cause either output stage saturation or breakdown, resulting in
nonlinear performance.
Temp er at u re D ri ft
Specified as the maximum change from the ambient (25°C)
value to the value at either T
drift, the drift is reported in ppm of full-scale range (FSR)
per °C. For reference drift, the drift is reported in ppm per °C.
MIN
or T
. For offset and gain
MAX
Power Supply Rejection (PSR)
The maximum change in the full-scale output as the supplies
are varied from nominal to minimum and maximum specified
voltages.
Spurious-Free Dynamic Range (SFDR)
The difference, in decibels (dB), between the rms amplitude of
the output signal and the peak spurious signal over the specified
bandwidth.
Total Harmonic Distortion (THD)
The ratio of the rms sum of the first six harmonic components
to the rms value of the measured input signal. It is expressed as
a percentage or in decibels (dB).
Noise Spectral Density (NSD)
NSD is the converter noise power per unit of bandwidth. This
is usually specified in dBm/Hz in the presence of a 0 dBm
full-scale signal.
Adjacent Channel Leakage Ratio (ACLR)
The adjacent channel leakage (power) ratio is a ratio, in dBc, of the
measured power within a channel relative to its adjacent channels.
Modulation Error Ratio (MER)
Modulated signals create a discrete set of output values referred
to as a constellation. Each symbol creates an output signal
corresponding to one point on the constellation. MER is a
measure of the discrepancy between the average output symbol
magnitude and the rms error magnitude of the individual symbol.
Intermodulation Distortion (IMD)
IMD is the result of two or more signals at different frequencies
mixing together. Many products are created according to the
formula, aF1 ± bF2, where a and b are integer values.
Rev. B | Page 17 of 48

AD9739 Data Sheet
SERIAL PORT INTERFACE (SPI) REGISTER
SPI REGISTER MAP DESCRIPTION
The AD9739 contains a set of programmable registers described
in Tabl e 1 0 that are used to configure and monitor various internal
parameters. Note the following points when programming the
AD9739 SPI registers:
• Registers pertaining to similar functions are grouped
together and assigned adjacent addresses.
• Bits that are undefined within a register should be assigned
a 0 when writing to that register.
• Registers that are undefined should not be written to.
• A hardware or software reset is recommended upon
power-up to place SPI registers in a known state.
• A SPI initialization routine is required as part of the boot
process. See Tab l e 3 1 and Tabl e 32 for example procedures.
Reset
Issuing a hardware or software reset places the AD9739 SPI
registers in a known state. All SPI registers (excluding 0x00) are
set to their default states as described in Tabl e 1 0 upon issuing a
reset. After issuing a reset, the SPI initialization process need only
write to registers that are required for the boot process as well as
any other register settings that must be modified, depending on
the target application.
Although the AD9739 does feature an internal power-on-reset
(POR), it is still recommended that a software or hardware reset
be implemented shortly after power-up. The internal reset signal is
derived from a logical OR operation from the internal POR
signal, the RESET pin, and the software reset state. A software
reset can be issued via the reset bit (Register 0x00, Bit 5) by
toggling the bit high then low. Note that, because the MSB/LSB
format may still be unknown upon initial power-up (that is,
internal POR is unsuccessful), it is also recommended that the
bit settings for Bits[7:5] be mirrored onto Bits[2:0] for the
instruction cycle that issues a software reset. A hardware reset
can be issued from a host or external supervisory IC by applying a
high pulse with a minimum width of 40 ns to the RESET pin
(that is, Pin F14). RESET should be tied to VSS if unused.
Table 8. SPI Registers Pertaining to SPI Options
Address (Hex) Bit Description
0x00
7 Enable 3-wire SPI
6 Enable SPI LSB first
5 Software reset
SPI OPERATION
The serial port of the AD9739 shown in Figure 34 has a 3- or
4-wire SPI capability, allowing read/write access to all registers
that configure the device’s internal parameters. It provides a
flexible, synchronous serial communications port, allowing easy
interface to many industry-standard microcontrollers and
microprocessors. The 3.3 V serial I/O is compatible with most
synchronous transfer formats, including the Motorola® SPI and
the Intel® SSR protocols.
SDO (PIN H14)
SDIO (PIN G14)
SCLK (PIN H13)
CS (PIN G13)
Figure 34. AD9739 SPI Port
The default 4-wire SPI interface consists of a clock (SCLK), serial
port enable (
CS
), serial data input (SDIO), and serial data output
(SDO). The inputs to SCLK,
trigger with a nominal hysteresis of 0.4 V centered about VDD33/2.
The maximum frequency for SCLK is 20 MHz. The SDO pin is
active only during the transmission of data and remains threestated at any other time.
A 3-wire SPI interface can be enabled by setting the SDIO_DIR
bit (Register 0x00, Bit 7). This causes the SDIO pin to become
bidirectional such that output data only appears on the SDIO
pin during a read operation. The SDO pin remains three-stated
in a 3-wire SPI interface.
Instruction Header Information
MSB LSB
17 16 15 14 13 12 11 10
R/W
A6 A5 A4 A3 A2 A1 A0
An 8-bit instruction header must accompany each read and write
operation. The MSB is a R/
W
indicating a read operation. The remaining seven bits specify
the address bits to be accessed during the data transfer portion.
The eight data bits immediately follow the instruction header
for both read and write operations. For write operations, registers
change immediately upon writing to the last bit of each transfer
CS
byte.
can be raised after each sequence of eight bits (except
the last byte) to stall the bus. The serial transfer resumes when
CS
is lowered. Stalling on nonbyte boundaries resets the SPI.
AD9739
SPI PORT
07851-034
CS
, and SDIO contain a Schmitt
indicator bit with logic high
Rev. B | Page 18 of 48

Data Sheet AD9739
S
The AD9739 serial port can support both most significant bit
(MSB) first and least significant bit (LSB) first data formats.
Figure 35 illustrates how the serial port words are formed for
the MSB first and LSB first modes. The bit order is controlled
by the SDIO_DIR bit (Register 0x00, Bit 7). The default value is 0,
MSB first. When the LSB first bit is set high, the serial port
interprets both instruction and data bytes LSB first.
CS
SCLK
SDATA
CS
SCLK
SDATA
INSTRUCTI ON CYCLE
R/W
A3A1 A2A0 A4
N2
Figure 35. SPI Timing, MSB First (Upper) and LSB First (Lower)
DATA TRANSFER CYCLE
A1A3 A2A4N1N1N2
A0
D7
D6
1
DATA TRANSFER CYCLEINSTRUCTI ON CYCLE
R/W
D01D1
1
1
D1ND0
D6ND7
N
N
07851-035
Figure 36 illustrates the timing requirements for a write operation
to the SPI port. After the serial port enable (
CS
) signal goes low,
data (SDIO) pertaining to the instruction header is read on the
rising edges of the clock (SCLK). To initiate a write operation,
the read/not-write bit is set low. After the instruction header is
read, the eight data bits pertaining to the specified register are
shifted into the SDIO pin on the rising edge of the next eight
clock cycles.
Figure 37 illustrates the timing for a 3-wire read operation to
the SPI port. After
CS
goes low, data (SDIO) pertaining to the
instruction header is read on the rising edges of SCLK. A read
operation occurs if the read/not-write indicator is set high. After
the address bits of the instruction header are read, the eight data
bits pertaining to the specified register are shifted out of the SDIO
pin on the falling edges of the next eight clock cycles.
Figure 38 illustrates the timing for a 4-wire read operation to
the SPI port. The timing is similar to the 3-wire read operation
with the exception that data appears at the SDO pin only, while the
SDIO pin remains at high impedance throughout the operation.
The SDO pin is an active output only during the data transfer
phase and remains three-stated at all other times.
CS
SCLK
SDIO
SCLK
t
R/W
DH
t
LOW
N1 N0
A0
D7
t
HI
t
DS
t
H
D1
D6
D0
7851-036
t
1/
f
S
Figure 36. SPI Write Operation Timing
t
f
1/
S
CS
CLK
t
SDIO
SCLK
t
R/W
t
LOW
t
DH
N1
A1
A2
DV
A0
D6
D7
t
EZ
D0
D1
07851-037
t
HI
DS
Figure 37. SPI 3-Wire Read Operation Timing
t
f
1/
S
CS
SCLK
t
SDIO
SCLK
t
R/W
t
LOW
t
DH
N1
A1
A2
A0
t
DV
EZ
t
EZ
t
HI
DS
D6
D0
SDO
D7
D1
07851-038
Figure 38. SPI 4-Wire Read Operation Timing
Rev. B | Page 19 of 48

AD9739 Data Sheet
SPI REGISTER MAP
Table 9. Full Register Map (N/A = Not Applicable)
Name
Mode 00 SDIO_DIR LSB/MSB Reset N/A N/A N/A N/A N/A 0x00
Power-
Down
CNT_
CLK_DIS
IRQ_EN 03 N/A N/A SYNC_
IRQ_REQ 04 N/A N/A SYNC_
RSVD 05 N/A N/A N/A N/A N/A N/A N/A N/A N/A
FSC_1 06 FSC[7] FSC[6] FSC[5] FSC[4] FSC[3] FSC[2] FSC[1] FSC[0] 0x00
FSC_2 07 Sleep N/A N/A N/A N/A N/A FSC[9] FSC[8] 0x02
DEC_
CNT
RSVD 09 N/A N/A N/A N/A N/A N/A N/A N/A N/A
LVDS_
CNT
DIG_
STAT
LVDS_
STAT1
LVDS_
STAT2
RSVD 0E N/A N/A N/A N/A N/A N/A N/A N/A N/A
RSVD 0F N/A N/A N/A N/A N/A N/A N/A N/A N/A
LVDS_
REC_
CNT1
LVDS_
REC_
CNT2
LVDS_
REC_
CNT3
LVDS_
REC_
CNT4
LVDS_
REC_
CNT5
LVDS_
REC_
CNT6
LVDS_
REC_
CNT7
LVDS_
REC_
CNT8
LVDS_
REC_
CNT9
LVDS_
REC_
STAT1
LVDS_
REC_
STAT2
Hex
Addr Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Default
01 N/A N/A LVDS_
02 N/A N/A N/A N/A CLKGEN_PD N/A REC_CNT_
08 N/A N/A N/A N/A N/A N/A DAC_DEC[1] DAC_DEC[0] 0x00
0A N/A N/A N/A N/A HNDOFF_
0B HNDOFF_
Fall[3]
0C SUP/HLD_
Edge1
0D SUP/HLD_
SYNC
10 SYNC_
FLG_RST
11 SMP_DEL[1] SMP_
12 SMP_DEL[9] SMP_
13 DCI_DEL[3] DCI_
14 CLKDIVPH[1] CLKDIVPH[0] DCI_
15 SYNC_
GAIN[1]
16 N/A SYNCO_
17 SYNCSH_
DEL[0]
18 SYNCSH_
DEL[8]
19 SMP_DEL[1] SMP_DEL[0] N/A N/A SMP_
1A SMP_DEL[9] SMP_
HNDOFF_
Fall[2]
N/A DCI_
SUP/HLD_
Edge0
SYNC_
LOOP_ON
DEL[0]
DEL[8]
DEL[2]
SYNC_
GAIN[0]
DEL[6]
N/A N/A N/A N/A N/A N/A N/A 0x00
SYNCSH_
DEL[7]
DEL[8]
DRVR_PD
LST_EN
LST_IRQ
HNDOFF_
Fall[1]
PHS3
SYNC_
SAMP1
SYNC_
MST/SLV
FINE_
DEL_
MID[3]
SMP_
DEL[7]
DCI_
DEL[1]
DEL[9]
SYNCOUT_
PH[1]
SYNCO_
DEL[5]
SYNCSH_
DEL[6]
SMP_
DEL[7]
LVDS_
RCVR_PD
SYNC_
LCK_EN
SYNC_
LCK_IRQ
HNDOFF_
Fall[0]
DCI_
PHS1
SYNC_
SAMP0
SYNC_
CNT_ENA
FINE_
DEL_
MID[2]
SMP_
DEL[6]
DCI_
DEL[0]
DCI_
DEL[8]
SYNCOUT_
PH[0]
SYNCO_
DEL[4]
SYNCSH_
DEL[5]
SMP_
DEL[6]
N/A N/A CLK_
MU_LST_EN MU_LCK_EN RCV_
MU_LST_
IRQ
CHK_RST
HNDOFF_
Rise[3]
DCI_PRE_
PH2
LVDS1_HI LVDS1_LO LVDS0_HI LVDS0_LO RNDM/0
N/A RCVR_
FINE_DEL_
MID[1]
SMP_
DEL[5]
FINE_DEL_
SKW[3]
DCI_
DEL[7]
LCKTHR[3] LCKTHR[2] LCKTHR[1] LCKTHR[0] 0x42
SYNCO_
DEL[3]
SYNCSH_
DEL[4]
FINE_
DEL[3]
SMP_
DEL[5]
MU_LCK_
IRQ
N/A LVDS_
HNDOFF_
Rise[2]
DCI_PRE_
PH0
FLG_RST
FINE_DEL_
MID[0]
SMP_
DEL[4]
FINE_DEL_
SKW[2]
DCI_
DEL[6]
SYNCO_
DEL[2]
SYNCSH_
DEL[3]
SMP_
FINE_
DEL[2]
SMP_
DEL[4]
RCVR_PD
CLK
LST_EN
RCVLST_
IRQ
Bias[1]
HNDOFF_
Rise[1]
DCI_PST_
PH2
RCVR_
LOOP_ON
RCVR_
GAIN[1]
SMP_
DEL[3]
FINE_DEL_
SKW[1]
DCI_
DEL[5]
SYNCO_
DEL[1]
SYNCSH_
DEL[2]
SMP_
FINE_
DEL[1]
SMP_
DEL[3]
DAC_
BIAS_PD
MU_CNT_
CLK
RCV_
LCK_EN
RCVLCK_
IRQ
LVDS_
Bias[0]
HNDOFF_
Rise[0]
DCI_PST_
PH0
RCVR_
CNT_ENA
RCVR_
GAIN[0]
SMP_
DEL[2]
FINE_DEL_
SKW[0]
DCI_
DEL[4]
SYNCO_
DEL[0]
SYNCSH_
DEL[1]
SMP_
FINE_
DEL[0]
SMP_
DEL[2]
0x00
0x03
0x00
0x00
0x00
RNDM
RNDM
0x42
0xDD
0x29
0x71
0x0A
0x00
0x00
0xC7
0x29
Rev. B | Page 20 of 48

Data Sheet AD9739
Hex
Name
LVDS_
REC_
STAT3
LVDS_
REC_
STAT4
LVDS_
REC_
STAT5
LVDS_
REC_
STAT6
LVDS_
REC_
STAT7
LVDS_
REC_
STAT8
LVDS_
REC_
STAT9
CROSS_
CNT1
CROSS_
CNT2
PHS_
DET
MU_
DUTY
MU_
CNT1
MU_
CNT2
MU_
CNT3
MU_
CNT4
MU_
STAT1
RSVD 2B N/A N/A N/A N/A N/A N/A N/A N/A N/A
RSVD 2C N/A N/A N/A N/A N/A N/A N/A N/A N/A
ANA_
CNT1
ANA_
CNT2
RSVD 34 N/A N/A N/A N/A N/A N/A N/A N/A N/A
PART ID 35 ID[7] ID[6] ID[5] ID[4] ID[3] ID[2] ID[1] ID[0] 0x20
Addr
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Default
1B DCI_DEL[1] DCI_DEL[0] N/A N/A SYNCOUT
1C DCI_DEL[9] DCI_
1D FINE_DEL_
PST[3]
1E N/A SYNCO_
1F SYNCSH_
DEL[0]
20 SYNCSH_
DEL[8]
21 SYNC_
TRK_ON
22 N/A N/A N/A DIR_P CLKP_
23 N/A N/A N/A DIR_N CLKN_
24 N/A N/A CMP_BST PHS_DET
25 MU_
DUTYAUTO_EN
26 N/A Slope Mode[1] Mode[0] Read Gain[1] Gain[0] Enable 0x42
27 MUDEL[0] SRCH_MODE
28 MUDEL[8] MUDEL[7] MUDEL[6] MUDEL[5] MUDEL[4] MUDEL[3] MUDEL[2] MUDEL[1] 0x00
29 SEARCH_TOL Retry CONTRST Guard[4] Guard[3] Guard[2] Guard[1] Guard[0] 0x0B
2A N/A N/A N/A N/A N/A N/A MU_LOST MU_LKD 0x00
32 HDRM[7] HDRM[6] HDRM[5] HDRM[4] HDRM[3] HDRM[2] HDRM[1] HDRM[0] 0xCA
33 N/A N/A N/A N/A N/A N/A MSEL[1] MSEL[0] 0x03
DEL[8]
FINE_DEL_
PST[2]
DEL[6]
N/A N/A N/A N/A N/A N/A N/A 0x00
SYNCSH_
DEL[7]
SYNC_
INIT_ON
POS/NEG ADJ[5] ADJ[4] ADJ[3] ADJ[2] ADJ[1] ADJ[0] 0x00
[1]
DCI_
DEL[7]
FINE_DEL_
PST[1]
SYNCO_
DEL[5]
SYNCSH_
DEL[6]
SYNC_
LST_LCK
SRCH_MODE
[0]
DCI_
DEL[6]
FINE_DEL_
PST[0]
SYNCO_
DEL[4]
SYNCSH_
DEL[5]
SYNC_LCK RCVR_
AUTO_EN
SET_PHS[4] SET_PHS[3] SET_PHS[2] SET_PHS[1] SETPHS[0] 0x40
PH[1]
DCI_
DEL[5]
FINE_DEL_
PRE[3]
SYNCO_
DEL[3]
SYNCSH_
DEL[4]
TRK_ON
OFFSET[3]
OFFSET[3]
Bias[3] Bias[2] Bias[1] Bias[0] 0x00
SYNCOUT
PH[0]
DCI_
DEL[4]
FINE_DEL_
PRE[2]
SYNCO_
DEL[2]
SYNCSH_
DEL[3]
RCVR_
FE_ON
CLKP_
OFFSET[2]
CLKN_
OFFSET[2]
CLKDIV
PH[1]
DCI_
DEL[3]
FINE_DEL_
PRE[1]
SYNCO_
DEL[1]
SYNCSH_
DEL[2]
RCVR_LST RCVR_LCK 0x00
CLKP_
OFFSET[1]
CLKN_
OFFSET[1]
CLKDIV
PH[0]
DCI_
DEL[2]
FINE_DEL_
PRE[0]
SYNCO_
DEL[0]
SYNCSH_
DEL[1]
CLKP_
OFFSET[0]
CLKN_
OFFSET[0]
0xC0
0x29
0x86
0x00
0x00
0x00
0x00
Rev. B | Page 21 of 48

AD9739 Data Sheet
SPI PORT CONFIGURATION AND SOFTWARE RESET
Table 10. SPI Port Configuration and Software Reset Register
Address
(Hex)
0x00
Name Bit R/W
SDIO_DIR 7 R/W 0 0 = 4-wire SPI, 1 = 3-wire SPI.
LSB/MSB 6 R/W 0 0 = MSB first, 1 = LSB first.
Reset 5 R/W 0
POWER-DOWN LVDS INTERFACE AND TXDAC®
Table 11. Power-Down LVDS Interface and TxDAC Register
Address
(Hex)
0x01
Name Bit R/W
LVDS_DRVR_PD 5 R/W 0
LVDS_RCVR_PD 4 R/W 0
CLK_RCVR_PD 1 R/W 0
DAC_BIAS_PD 0 R/W 0
CONTROLLER CLOCK DISABLE
Default
Setting
Comments
Software reset is recommended before modification of other SPI registers from the default
setting. Setting the bit to 1 causes all registers (except 0x00) to be set to the default setting.
Setting the bit to 0 corresponds to the inactive state, allowing the user to modify registers
from the default setting.
Default
Setting
Comments
Power-down of the LVDS drivers/receivers and TxDAC.
0 = enable, 1 = disable.
Table 12. Controller Clock Disable Register
Address
(Hex) Name Bit R/W
0x02
CLKGEN_PD 3 R/W 0
REC_CNT_CLK 1 R/W 1
MU_CNT_CLK 0 R/W 1
Default
Setting Comments
INTERRUPT REQUEST (IRQ) ENABLE/STATUS
Table 13. Interrupt Request (IRQ) Enable/Status Register
Address
(Hex) Name Bit R/W
0x03
0x04
SYNC_LST_EN 5 W 0
SYNC_LCK_EN 4 W 0
MU_LST_EN 3 W 0
MU_LCK_EN 2 W 0
RCV_LST_EN 1 W 0
RCV_LCK_EN 0 W 0
SYNC_LST_IRQ 5 R 0
SYNC_LCK_IRQ 4 R 0
MU_LST_IRQ 3 R 0
MU_LCK_IRQ 2 R 0
RCV_LST_IRQ 1 R 0
RCV_LCK_IRQ 0 R 0
Default
Setting Comments
This register enables the sync, mu, and LVDS Rx controllers to update their
corresponding IRQ status bits in Register 0x04, which defines whether the controller is
locked (LCK) or unlocked (LST).
0 = disable (resets the status bit).
1 = enable.
This register indicates the status of the controllers. For LCK_IQR bits: 0 = lost locked, 1
= locked. For LST_IQR bits: 0 = not lost locked, 1 = unlocked. Note that, if the
controller IRQ is serviced, the relevant bits in Register 0x03 should be reset by writing
0, followed by another write of 1 to enable.
Internal CLK distribution enable:
0 = enable, 1 = disable.
LVDS receiver and Mu controller clock disable.
0 = disable, 1 = enable.
Rev. B | Page 22 of 48

Data Sheet AD9739
TxDAC FULL-SCALE CURRENT SETTING (I
) AND SLEEP
OUTFS
Table 14. TxDAC Full-Scale Current Setting (I
Address
(Hex)
0x06 FSC_1 [7:0] R/W 0x00
0x07
Name Bit R/W
FSC_2 [1:0] R/W
Sleep 7 R/W
Default
Setting
0x02
) and Sleep Register
OUTFS
Comments
Sets the TxDAC I
I
= 0.0226 × FSC[9:0] + 8.58, where FSC = 0 to 1023.
OUTFS
0 = enable DAC output, 1 = disable DAC output (sleep).
current between 8 mA and 31 mA (default = 20 mA).
OUTFS
TxDAC QUAD-SWITCH MODE OF OPERATION
Table 15. TxDAC Quad-Switch Mode of Operation Register
Address
(Hex) Name Bit R/W
0x08 DAC-DEC [1:0] R/W 0x00
Default
Setting Comments
DCI PHASE ALIGNMENT STATUS
Table 16. DCI Phase Alignment Status Register
Address
(Hex) Name Bit R/W
0x0C
DCI_PRE_PH0 2 R 0
DCI_PST_PH0 0 R 0
Default
Setting Comments
0 = DCI rising edge is after the PRE delayed version of the Phase 0 sampling edge.
1 = DCI rising edge is before the PRE delayed version of the Phase 0 sampling edge.
0 = DCI rising edge is after the POST delayed version of the Phase 0 sampling edge.
1 = DCI rising edge is before the POST delayed version of the Phase 0 sampling edge.
SYNC_IN PHASE ALIGNMENT STATUS
0x00 = normal baseband mode.
0x01 = return-to-zero mode.
0x02 = mix mode.
Table 17. SYNC_IN Phase Alignment Status Register
Address
(Hex) Name Bit R/W
0x0D
SYNC_IN_PH90 5 R 0
SYNC_IN_PH0 4 R 0
Default
Setting Comments
DATA RECEIVER CONTROLLER CONFIGURATION
Table 18. Data Receiver Controller Configuration Register
Address
(Hex)
0x10
Name Bit R/W
SYNC_FLG_RST 7 W 0 Sync controller flag reset. Write 1 followed by 0 to reset flags.
SYNC_LOOP_ON 6 R/W 1
SYNC_MST/SLV 5 R/W 0 Sync controller configuration. 0 = slave, 1 = master.
SYNC_CNT_ENA 4 R/W 0 Sync controller enable. 0 = disable, 1 = enable
RCVR_FLG_RST 2 W 0 Data receiver controller flag reset. Write 1 followed by 0 to reset flags.
RCVR_LOOP_ON 1 R/W 1
RCVR_CNT_ENA 0 R/W 0 Data receiver controller enabled. 0 = disable, 1 = enable.
Default
Setting
Comments
0 = disable, 1 = enable. Enable for master only. When enabled, sync controller
generates an IRQ when master falls out of lock and automatically begins
search/track routine.
0 = disable, 1 = enable. When enabled, the data receiver controller generates an IRQ;
it falls out of lock and automatically begins a search/track routine.
0 = SYNCIN rising edge is after Phase 90 sampling edge.
1 = SYNCIN rising edge is before Phase 90 sampling edge.
0 = SYNCIN rising edge is after Phase 0 sampling edge.
1 = SYNCIN rising edge is before Phase 0 sampling edge.
Rev. B | Page 23 of 48

AD9739 Data Sheet
DATA RECEIVER CONTROLLER_DATA SAMPLE DELAY VALUE
Table 19. Data Receiver Controller_Data Sample Delay Value Register
Address
(Hex)
0x11 SMP_DEL[1:0] [7:6] R/W 11
0x12 SMP_DEL[9:2] [7:0] R/W 0x25
Name Bit R/W
DATA AND SYNC RECEIVER CONTROLLER_DCI DELAY VALUE/WINDOW AND PHASE ROTATION
Table 20. Data and Sync Receiver Controller_DCI Delay Value/Window and Phase Rotation Register
Address
(Hex)
0x14
0x15
Name Bit R/W
DCI_DEL[3:0] [7:4] R/W 0111 Refer to the DCI_DEL description in Register 0x14. 0x13
FINE_DEL_SKEW [3:0] R/W 0001
CLKDIVPH[1:0] [7:6] R/W 00
DCI_DEL[9:4] [5:0] R/W 001010
SYNC GAIN[1:0] [7:6] R/W 00 Sets the sync tracking gain (optimal value is 1).
Default
Setting
Default
Setting
Comments
Controller enabled: the 10-bit value (with a maximum of 332) represents the start
value for the delay line used by the state machine to sample data. Leave at the default
setting of 167, which represents the midpoint of the delay line. Controller disabled:
the value sets the actual value of the delay line.
Comments
A 4-bit value sets the difference (that is, window) for the DCI PRE and POST
sampling clocks. Leave at the default value of 1 for a narrow window.
Relative phase of internal div-by-4 circuit. This feature allows phase rotation in 90°
increments (that is, 1 count) to extend Rx controllers locking range for clock rates
between 0.8 GSPS to 1.6 GSPS (only valid with sync controller disabled).
Controller enabled: the 10-bit value (with a maximum of 332) represents the start
value for the delay line used by the state machine to sample the DCI input. Leave
at the default setting of 167, which represents the midpoint of the delay line.
Controller disabled: the value sets the actual value of the delay line.
SYNCOUT_PH[1:0] [5:4] R/W 00 Readback of the present SYNC_OUT phase selection.
LCKTHR[3:0] [3:0] R/W 0000 Sets the difference between the sample and DCI delays to lock (optimal value is 2).
0x16 SYNCO_DEL[6:0] [6:0] R/W 0x00
0x17 SYNCSH_DEL[0] [7] R/W 0x00
0x18 SYNCSH_DEL[8:1] [7:0] R/W 0x00
Sets the sync output delay value when the synch controller is disabled; otherwise,
is the read status of the sync output delay value when sync is enabled.
Sets the sync setup and hold delay value when the synch controller is disabled;
otherwise, is the read status of sync setup and hold value when sync is enabled.
Sets the sync setup and hold delay value when the synch controller is disabled;
otherwise, is the read status of sync setup and hold value when sync is enabled.
DATA RECEIVER CONTROLLER_DELAY LINE STATUS AND SYNC CONTROLLER SYNC_OUT STATUS
Table 21. Data Receiver Controller_Delay Line Status and Sync Controller SYNC_OUT Status Register
Address
(Hex) Name Bit R/W
0x19 SMP_DEL[1:0] [7:6] R 00
0x1A SMP_DEL[9:2] [7:0] R 0x00
0x1B
0x1C DCI_DEL[9:2] [7:0] R 0x00
SYNCOUT_PH[1:0] 3:2 R 00
CLKDIV PH[1:0] 1:0 R 00
DCI_DEL[1:0] [7:6] R 00
Default
Setting Comments
The actual value of the DCI and data delay lines determined by the data receiver
controller (when enabled) after the state machine completes its search and enters
track mode. Note that these values should be equal.
SYNCOUT_PH provides phase status (0/90/180/270) of phase select mux, while
CLKDIVPH provides phase status of data receiver controller (Register 0x14).
Rev. B | Page 24 of 48

Data Sheet AD9739
SYNC AND DATA RECEIVER CONTROLLER LOCK/TRACKING STATUS
Table 22. Sync and Data Receiver Controller Lock/Tracking Status Register
Address
(Hex)
0x21
Name Bit R/W
SYNC_TRK_ON 7 R 0
SYNC_LST 5 R 0
SYNC_LCK 4 R 0
RCVR_TRK_ON 3 R 0
RCVR_LST 1 R 0
RCVR_LCK 0 R 0
CLK INPUT COMMON MODE
Table 23. CLK Input Common Mode Register
Address
(Hex) Name Bit R/W
DIR_P 4 R/W 0 0x22
CLKP_OFFSET[3:0] [3:0] R/W 0000
DIR_N 4 R/W 0 0x23
CLKN_OFFSET[3:0] [3:0] R/W 0000
Default
Setting Comments
Default
Setting
DIR_P and DIR_N:
0 = VCM at the DACCLK_P input decreases with the offset value.
1 = VCM at the DACCLK_P input increases with the offset value.
CLKx_OFFSET sets the magnitude of the offset for the DACCLK_P and DACCLK_N
inputs. For optimum performance, set to 1111.
Comments
SYNC_TRK_ON and RCVR_TRK_ON:
0 = tracking not established.
1 = tracking established.
SYNC_LCK and RCVR_LCK:
0 = controller is not locked.
1 = controller is locked.
SYNC_LST and RCVR_LST:
0 = lock has not been lost.
1 = lock has been lost at some point.
MU CONTROLLER CONFIGURATION AND STATUS
Table 24. Mu Controller Configuration and Status Register
Address
(Hex) Name Bit R/W
CMP_BST 5 R/W 0 0x24
4 R/W 0
7 R/W 0 Mu controller duty cycle enable. Note that this bit should always be set to 1 to enable.
0x25
0x26
0x27
PHS_DET
AUTO_EN
MU_DUTY
AUTO_EN
Slope 6 R/W 1
Mode[1:0] [5:4] R/W 00
Read 3 R/W 0 Set to 1 to read the current value of the Mu delay line in.
Gain[1:0] [2:1] R/W 01 Sets the mu controller tracking gain. Recommended to leave at the default 01 setting.
Enable 0 R/W 0
MUDEL[0] 7 R/W 0 The LSB of the 9-bit MUDEL setting.
SRCH_MODE[1:0] [6:5] R/W 0
SET_PHS[4:0] [4:0] R/W 0
Default
Setting Comments
Phase detector enable and boost bias bits. Note that both bits should always be set to 1
to enable these functions.
Mu controller phase slope lock. 0 = negative slope, 1 = positive slope.
Refer to Table 2 8 for optimum setting.
Sets the mu controller mode of operation.
00 = search and track (recommended).
01 = search only.
10 = track.
1 = enable the mu controller.
0 = disable the mu controller.
Sets the direction in which the mu controller searches (from its initial MUDEL setting) for
the optimum mu delay line setting that corresponds to the desired phase/slope setting
(that is, SET_PHS and slope ).
00 = down.
01 = up.
10 = down/up (recommended).
Sets the target phase that the mu controller locks to with a maximum setting of 16.
Refer to Table 2 8 for optimum setting.
Rev. B | Page 25 of 48

AD9739 Data Sheet
Address
(Hex) Name Bit R/W
0x28 MUDEL[8:1] [7:0]
0x29
0x2A
SEARCH_TOL 7 R/W 0
Retry 6 R/W 0
CONTRST 5 R/W 0
Guard[4:0] 4 R/W 01011
MU_LST 1 R 0
MU_LKD 0 R 0
Default
Setting Comments
W 0x00
R 0x00
With enable (Bit 0, Register 0x26) set to 0, this 9-bit value represents the value that
the mu delay is set to. Note that the maximum value is 432.
With enable set to 1, this value represents the mu delay value at which the
controller begins its search. Setting this value to the delay line midpoint of 216 is
recommended.
When read (Bit 3, Register 0x26) is set to 1, the value read back is equal to the value
written into the register when enable = 0 or the value that the mu controller locks
to when enable = 1.
0 = not exact (can find a phase within two values of the desired phase).
1 = finds the exact phase that is targeted (optimal setting).
0 = stop the search if the correct value is not found.
1 = retry the search if the correct value is not found.
Controls whether the controller resets or continues when it does not find the
desired phase.
0 = continue (optimal setting).
1 = reset.
Sets a guard band from the beginning and end of the mu delay line which the mu
controller does not enter into unless it does not find a valid phase outside the
guard band (optimal value is Decimal 11 or 0x0B).
0 = mu controller has not lost lock.
1 = mu controller has lost lock.
0 = mu controller is not locked.
1= mu controller is locked.
PART ID
Table 25. Part ID Register
Default
Address (Hex) Name Bit R/W
0x35 PART_ID [7:0] R 0x20 Part ID number.
Setting Comments
Rev. B | Page 26 of 48

Data Sheet AD9739
THEORY OF OPERATION
Figure 39 shows a top-level functional diagram of the AD9739.
A high performance TxDAC core delivers a signal dependent,
differential current (nominal ±10 mA) to a balanced load
referenced to ground. The frequency of the clock signal
appearing at the AD9739 differential clock receiver, DACCLK,
sets the TxDAC’s update rate. This clock signal, which serves as
the master clock, is routed directly to the TxDAC as well as to a
clock distribution block that generates all critical internal and
external clocks.
SDIO
SDO
CS
SCLK
DCI
DCO
SYNC_OUT
SYNC_IN
RESET
SPI
DB0[13:0]DB1[13:0]
Figure 39. Functional Block Diagram of the AD9739
LVDS DDR
DATA
CONTRO LLER
LVDS DDR
CLK DISTRIBUTI ON
(DIV-BY-4)
SYNC-
CONTRO LLER
RECEIVER
RECEIVER
IRQ
AD9739
DAC BIAS
4-TO-1
DATA ASSEMBLER
1.2V
VREF
I120
TxDAC
CORE
DATA
LATCH
DLL
DACCLK
IOUTP
IOUTN
(MU CONTROL LER)
07851-039
The AD9739 includes two 14-bit LVDS data ports (DB0 and
DB1) to reduce the data interface rate to ½ the TxDAC update rate.
The host processor drives deinterleaved data with offset binary
format onto the DB0 and DB1 ports, along with an embedded DCI
clock that is synchronous with the data. Because the interface is
double data rate (DDR), the DCI clock is essentially an alternating
010101……….01010 bit pattern with a frequency equal to ¼ the
TxDAC update rate (f
). To simplify synchronization with the
DAC
host processor, the AD9739 passes an LVDS clock output (DCO)
that is also equal to the DCI frequency.
The AD9739 data receiver controller generates an internal
sampling clock offset by 90° from the DCI to sample the input
data on the DB0 and DB1 ports. When enabled and configured
properly for track mode, it ensures proper data recovery between
the host and the AD9739 clock domains. The data receiver
controller has the ability to track several hundreds of ps of drift
between these clock domains, typically caused by supply and
temperature variation.
As mentioned, the host processor provides the AD9739 with a
deinterleaved data stream such that the DB0 and DB1 data ports
receive alternating samples (that is, odd/even data streams). The
AD9739 data assembler is used to reassemble (that is, multiplex)
the odd/even data streams into their original order before
delivery into the TxDAC for signal reconstruction. The pipeline
delay from a sample being latched into the data port to when it
appears at the DAC output is on the order of 78 (±) DACCLK
cycles. Applications that require matching pipeline delays (that
is, synchronization) between multiple AD9739s can use the
SYNC controller. The SYNC controller phase aligns the outputs
of one or more AD9739 devices (that is,. slaves) to a master
AD9739 device.
The AD9739 includes a delay lock loop (DLL) circuit controlled
via a mu controller to optimize the timing hand-off between the
AD9739 digital clock domain and TxDAC core. Besides ensuring
proper data reconstruction, the TxDAC’s ac performance is also
dependent on this critical hand-off between these clock domains
with speeds of up to 2.5 GSPS. Once properly initialized and
configured for track mode, the DLL maintains optimum timing
alignment over temperature, time, and power supply variation.
A SPI interface is used to configure the various functional blocks as
well as monitor their status for debug purposes. Proper operation
of the AD9739 requires that controller blocks be initialized upon
power-up. A simple SPI initialization routine is used to configure
the controller blocks (see Figure 51 and Figure 52). An IRQ
output signal is available to alert the host should any of the
controllers fall out of lock during normal operation.
The following sections discuss the various functional blocks in
more detail as well as their implications when interfacing to
external ICs and circuitry. While a detailed description of the
various controllers (and associated SPI registers used to configure
and monitor) is also included for completeness, the recommended
SPI boot procedure can be used to ensure reliable operation.
Rev. B | Page 27 of 48

AD9739 Data Sheet
A
LVDS DATA PORT INTERFACE
The AD9739 supports input data rates from 1.6 GSPS to 2.5 GSPS
using dual LVDS data ports. The interface is source synchronous
and double data rate (DDR) where the host provides an embedded
data clock input (DCI) at f
aligned with the data transitions. The data format is offset binary;
however, twos complement format can be realized by reversing
the polarity of the MSB differential trace. As shown in Figure 40,
the host feeds the AD9739 with deinterleaved input data into
two 14-bit LVDS data ports (DB0 and DB1) at ½ the DAC clock
rate (that is, f
/2). The AD9739 internal data receiver controller
DAC
then generates a phase shifted version of DCI to register the
input data on both the rising and falling edges.
HOST
PROCESSOR
EVEN DATA
SAMPLES
f
DATA
ODD DATA
SAMPLES
LVDS DDR DRI VER
DATA DEINTERLEAVER
f
DCI
f
DCO
Figure 40. Recommended Digital Interface Between the AD9739 and
As shown in Figure 41, the DCI clocks edges must be coincident
with the data bit transitions with minimum skew, jitter, and
intersymbol interference. To ensure coincident transitions with the
data bits, the DCI signal should be implemented as an additional
data line with an alternating (010101…) bit sequence from the
same output drivers used for the data. Maximizing the opening
of the eye in both the DCI and data signals improves the reliability
of the data port interface. Differential controlled impedance traces
of equal length (that is, delay) should also be used between the
host processor and AD9739 input to limit bit-to-bit skew.
/4 with its rising and falling edges
DAC
AD9739
14 × 2
DB0[13:0]
=
f
/2
DAC
14 × 2
DB1[13:0]
1 × 2
=
1 × 2
=
f
DAC
f
DAC
/4
/4
DCI
DCO
DIV-BY-4
Host Processor
LVDS DDR
RECEIVER
LVDS DDR
RECEIVER
DATA
CONTROL LER
f
DAC
07851-040
The maximum allowable skew and jitter out of the host
processor with respect to the DCI clock edge on each LVDS
port is calculated as
MaxSkew + Jitter = Period(ns) − ValidWindow(ps) − Guard
= 800 ps − 344 ps − 100 ps
= 356 ps
where Va li dW in d ow (ps) is represented by t
represented by t
in Figure 41.
GUARD
and Guard is
VA L I D
The minimum specified LVDS valid window is 344 ps, and a
guard band of 100 ps is recommended. Therefore, at the maximum
operating frequency of 2.5 GSPS, the maximum allowable FPGA
and PCB bit skew plus jitter is equal to 356 ps.
For synchronous operation, the AD9739 provides a data clock
output, DCO, to the host at the same rate as DCI (that is, f
DAC
/4)
to maintain the lowest skew variation between these clock
domains. Since the DCO signal is generated from a separate
clock divider, its phase relationship relative to the f
/4 clocks
DAC
used by the data receiver controller will vary upon each power-up.
Applications sensitive to this phase ambiguity (resulting in a ±2
DACCLK pipeline variation) should consider using the sync
controller.
The host processor has a worst-case skew between DCO and
DCI that is both implementation and process dependent. This
worst-case skew can also vary an additional 30% over temperature
and supply corners. The delay line within the data receiver
controller can track a ±1.5 ns skew variation after initial lock.
While it is possible for the host to have an internal PLL that
generates a synchronous f
/4 from which the DCI signal is
DAC
derived, digital implementations that result in the shortest
propagation delays result in the lowest skew variation.
The data receiver controller is used to ensure proper data hand-off
between the host and AD9739 internal digital clock domains.
The circuit shown in Figure 42 functions as a delay lock loop in
which a 90
o
phase shifted version of the DCI clock input is used
to sample the input data into the DDR receiver registers. This
ensures that the sampling instance occurs in the middle of the
data pattern eyes (assuming matched DCI and DBx[13:0] delays).
Note that, because the DCI delay and sample delay clocks are
derived from the div-by-4 circuitry, this 90° phase relationship
holds as long as the delay settings (that is, DCI_DEL, SMP_DEL)
are also matched.
2 × 1
/f
DAC
DCI
t
+
t
VALID
DB0[13:0]
ND DB1[13:0]
t
VALID
GUARD
MAX SKEW
+ JITTER
07851-041
Figure 41. LVDS Data Port Timing Requirements
Rev. B | Page 28 of 48

Data Sheet AD9739
DATA RECEI VER CONT ROLLE R
DCI WINDOW PRE
DCI
DDR
FF
DBx[13:1]
DCO
DDR
DCI WINDOW P OST
FF
DCI WINDOW SAMPLE
DDR
FF
SAMPLE
DDR
FF
FINE
DELAY
PRE
FINE
DELAY
POST
FINE
DELAY
DDR
FF
ELASTIC FIFO
DELAY
DELAY
Figure 42. Top Level Diagram of the Data Receiver Controller
The div-by-4 circuit generates four clock phases that serve as inputs
to the data receiver controller. All of the DDR registers in the data
and DCI paths operate on both clock edges; however, for clarity
purposes, only the phases (that is, 0
o
and 90o) corresponding to
the positive edge of each path are shown. One of the div-by-4
phases is used to generate the DCO signal; therefore, the phase
relationship between DCO and clocks fed into the controller
remains fixed. Note that it is this attribute that allows possible
factory calibration of images and clock spurs attributed to f
DAC
/4
modulation of the critical DAC clock.
Once this data has been successively sampled into the first set
of registers, an elastic FIFO is used to transfer the data into
the AD9739 clock domain. To continuously track any phase
variation between the two clock domains, the data receiver
controller should always be enabled and placed into track
mode (Register 0x10, Bit 1 and Bit 0). Tracking mode operates
continuously in the background to track delay variations between
the host and AD9739 clock domains. It does so by ensuring that
the DCI signal is sampled within a very narrow window defined
by two internally generated clocks (that is, PRE and PST), as
shown in Figure 43.
STATE MACHINE/
TRACKING LOOP
DDR
FF
DELAY
DCI DELAY
SAMPLE
DELAY
DELAY
DCI
DELAY
PATH
SAMPLE
DELAY
PATH
DDR
FF
TO SYNC
CONTROLLER
DATA TO
CORE
FROM SYNC CONTRO LLER
OR
SPI REG 0x14, BIT[7:6]
PHASE
ROTATION
0
90
DIV-BY-4
180
270
DIV-BY-4
Proper sampling of the DCI signal can also be confirmed by
monitoring the status of DCI_PRE_PH0 (Register 0x0C, Bit 2)
and DCI_PST_PH0 (Register 0x0C, Bit 0). If the delay settings
are correct, the state of DCI_ PRE_PH0 should be 0, and the
state of DCI_PST_PH0 should be 1. Note that the states of these
status bits may toggle occasionally due to cycle-to cycle jitter
exceeding the window width. However, the controller averages
these status bits over multiple clock cycles to ensure that the
DCI signal falls within a programmable window.
DCI
FINE DELAY
PST
FINE DELAY
PRE
FINE_DEL_SKEW
Figure 43. Pre- and Post-Delay Sampling Diagram
The skew or window width (FINE_DEL_SKEW) is set via
Register 0x13, Bits[3:0], with a maximum skew of approximately
180 ps and resolution of 12 ps. It is recommended that the skew
be set to 36 ps (that is, Register 0x13 = 0x72) during initialization.
The skew setting also affects the speed of the controller loop,
with tighter skew settings corresponding to longer response time.
F
DAC
07851-042
07851-043
Rev. B | Page 29 of 48

AD9739 Data Sheet
Data Receiver Controller Initialization Description
The data controller should be initialized and placed into track
mode as the second step in the SPI boot sequence. The following
steps are recommended for the initialization of the data receiver
controller:
1. Set FINE_DEL_SKEW to 2 for a larger DCI sampling
window (Register 0x13 = 0x72). Note that the default
DCI_DEL and SMP_DEL settings of 167 are optimum.
2. Disable the controller before enabling (that is, Register
0x10 = 0x00).
3. Enable the Rx controller in two steps: Register 0x10 = 0x02
followed by Register 0x10 = 0x03.
4. Wait 135K clock cycles.
5. Read back Register 0x21 and confirm that it is equal to
0x05 to ensure that the DLL loop is locked and tracking.
6. Include this step for operation <1.6 GSPS. Read back the
DCI_DEL value to determine whether the value falls
within a user-defined tracking guard band. If it does not,
rotate CLKDIVPH by 1 (Register 0x14, Bits[7:6] and go
back to Step 2.
Once the controller is enabled during the initial SPI boot
process (see Ta b le 3 1 and Ta b le 3 2), the controller enters a
search mode where it seeks to find the closest rising edge of the
DCI clock (relative to a delayed version of an internal f
/4 clock)
DAC
by simultaneously adjusting the delays in the clocks used to
register the DCI and data inputs. A state machine searches
above and below the initial DCI_DEL value. The state machine
first searches for the first rising edge above the DCI_DEL and
then searches for the first rising edge below the DCI_DEL value.
The state machine selects the closest rising edge and then enters
track mode. It is recommended that the default midscale delay
setting (that is, Decimal 167) for the DCI_DEL and SMP_DEL
bits be kept to ensure that the selected edge remains closest to
the delay line midpoint, thus providing the greatest range for
tracking timing variations and preventing the controller from
falling out of lock.
The adjustable delay span for these internal clocks (that is, DCI
and sample delay) is nominally 4 ns. The 10-bit delay value is
user programmable from the decimal equivalent code (0 to 384)
with approximately 12 ps/LSB resolution via the DCI_DEL and
SMP_DEL registers (via Register 0x11 thru Register 0x14). When
the controller is enabled, it overwrites these registers with the
delay value it converges upon. The minimum difference
between this delay value and the minimum/maximum values
(that is, 0 and 334) represents the guard band for tracking.
Therefore, if the controller initially converges upon a DCI_DEL
and SMP_DEL value between 80 and 304, the controller has a
guard band of at least 80 code (approximately 1 ns) to track
phase variations between the clock domains.
Upon initialization of the AD9739, a certain period of time is
required for the data receiver controller to lock onto the DCI clock
signal. Note that, due to its dependency on the mu controller and
Rev. B | Page 30 of 48
synchronization controller (optional), the data receiver controller
should be enabled only after these other controllers have been
enabled and established locked. All of the internal controllers
operate at submultiples of the DAC update rate. The number of
f
clock cycles required to lock onto the DCI clock is dependent
DAC
on whether the synchronization controller is enabled as shown
in Tab l e 2 6 .
Table 26. Typical/Worst-Case Lock Times for LVDS Controller
(Relative to 1/f
Synchronization Controller Typical Worst Case
Off 70K 135K
Slave 70K 135K
Master 300K 560K
DAC
)
During the SPI initialization process, the user has the option of
polling Register 0x21 (Bit 0, Bit 1, and Bit 3) to determine if the
data receiver controller is locked, has lost lock, or has entered into
track mode before completing the boot sequence. Alternatively, the
appropriate IRQ bit (Register 0x03 and Register 0x04) can be
enabled such that an IRQ output signal is generated upon the
controller establishing lock (see the Interrupt Requests section).
The data receiver controller can also be configured to generate
an interrupt request (IRQ) upon losing lock. Losing lock can be
caused by excessive jitter on the DCI input signal, disruption of
the main DAC clock input, or loss of a power supply rail. To service
the interrupt, the host can poll the RCVR_LCK bit (Register 0x21,
Bit 0) to determine the current state of the controller. If this bit
is cleared, the search/track procedure can be restarted by setting
the RCVR_LOOP_ON bit in Register 0x10, Bit 1. After waiting
the required lock time, the host can poll the RCVR_LCK bit to
see if it has been set. Before leaving the interrupt routine, the
RCVR_FLG_RST bit (Register 0x10, Bit 2) should be reset by
writing a high followed by a low.
Data Receiver Operation at Lower Clock Rates
At clock rates below 1.6 GSPS, it is recommended to include
provisions to rotate the CLKDIVPH setting in the SPI boot
process. As previously mentioned, the delay line can be varied
over a nominal 4 ns window. If the minimum specified clock
rate of 800 MSPS is considered, a DCI clock rate of 200 MSPS
corresponds to a 5 ns period, thus exceeding the delay line length.
Therefore, it becomes possible that the initial startup phase from
the div-by-4 circuit (and DCO output) is such that the data receiver
controller can never establish initial lock upon power up.
If the clock rate is increased to 1600 MSPS (that is, DCI clock
period of 2.5 ns), the controller will always be able to find at
least two DCI clock edges, therefore, establish lock. However,
should the DCI edges fall symmetrically (equal distance) from
the initial DCI_DEL midscale setting, a guard band of ±0.75 ns
(that is, (4.0 − 2.5)/2) results. Rotating the CLKDIVPH can result
in an improvement in this case by skewing one of the DCI edges
toward the DCI_DEL midscale value.

Data Sheet AD9739
=
V
V
V
Rotating the CLKDIVPH phase provides a means of adjusting
the delay in course steps of f
/4. For example, in the 800 MSPS
DAC
and 1600 MSPS cases described above, rotating the CLKDIVPH
setting by 1 corresponds to a delay shift of 5 ns and 2.5 ns,
respectively. By adding an additional step in the SPI initialization
routine for the data receiver controller, it becomes possible to
increase the effective range of the delay line to ensure a
DCI_DEL value that falls within a reasonable guard band.
LVDS Driver and Receiver Input
The AD9739 features a LVDS-compatible driver and receivers.
The LVDS driver output used for the DCO and SYNC_OUT
signal includes an equivalent 200 source resistor that limits its
nominal output voltage swing to ±200 mV when driving a
100 load. The DCO output driver can be powered down via
Register 0x01, Bit 5. An equivalent circuit is shown in Figure 44
DD33
DCO_N
V+
ESD ESD
V–
100Ω
100Ω
VCM
V–
DCO_P
V+
V
COM
(VP + VN)/2
V
P
LOGIC BIT
EQUIVALENT
VP = 1.4V
V
P, N
V
N
EXAMPLE
V
P
V
N
V
P
V
N
Figure 46. LVDS Data Input Levels
DD33 = 3.3V
R1
100Ω
100Ω
LVDS INPUTS
(NO FAIL-SAFE)
GND
LVDS_1
LVD S
RECEIVER
1.4V
1.0V
0.4V
0V
–0.4V
LOGIC 1
LOGIC 0
07851-046
VSS
07851-044
Figure 44. Equivalent LVDS Output
DD33
VP = 1.4V
R2
R1 = 4.75 × 100/ N
R2 = 2.50 × 100/ N
DCI_P
DBx[13:0]P
ESD
100Ω
ESD
DCI_N
DBx[13:0]N
Figure 47. Resistor Network to Bias Unused LVDS Data Inputs
VSS
07851-045
Figure 45. Equivalent LVDS Input
The LVDS receivers include 100 termination resistors, as
shown in Figure 45. These receivers meet the IEEE-1596.3-1996
reduced swing specification (with the exception of input hysteresis,
which cannot be guaranteed over all process corners). Figure 46
The AD9739 LVDS inputs do not include fail-safe capability.
Any unused data input pins should be biased with an external
network or static driver. Figure 47 shows an external biasing
network that can be used to place unused data bits into a known
state. The resistor values for R1 and R2 are selected to establish
a V
and VN of 1.4 V and 1.0 V, respectively, depending on the
P
number of unused digital inputs, N.
and Figure 47 show an example of nominal LVDS voltage levels
seen at the input of the differential receiver with resulting commonmode voltage and equivalent logic level. The LVDS receivers
can be powered down via Register 0x01, Bit 4.
Table 27. Example of LVDS Input Levels
Applied Voltages Resulting Differential Voltage Resulting Common-Model Voltage
VP (V) VN (V) V
V
P, N
Logic Bit Binary Equivalent
COM
1.4 1.0 +0.4 V 1.2 V 1
1.0 1.4 −0.4 V 1.2 V 0
1.0 0.8 +200 mV 900 mV 1
0.8 1.0 −200 mV 900 mV 0
100Ω
100Ω
LVDS_2
LVDS_N
07851-047
Rev. B | Page 31 of 48

AD9739 Data Sheet
T
T
MU CONTROLLER
A delay lock loop (DLL) is used to optimize the timing between
the internal digital and analog domains of the AD9739 such that
data is successfully transferred into the TxDAC core at rates of
up to 2.5 GSPS. As shown in Figure 48, the DAC clock is split
into an analog and a digital path with the critical analog path
leading to the DAC core (for minimum jitter degradation) and
the digital path leading to a programmable delay line. Note that
the output of this delay line serves as the master internal digital
clock from which all other internal and external digital clocks
are derived. The amount of delay added to this path is under the
control of the mu controller, which optimizes the timing between
these two clock domains and continuously tracks any variation
(once in track mode) to ensure proper data hand-off.
14-BI
DAC
CLOCK
DATA
DIGIT AL
CIRCUITRY
MU
DELAY
CONTROL LER
Figure 48. Mu Delay Controller Block Diagram
The mu controller adjusts the timing relationship between the
digital and analog domains via a tapped digital delay line having
a nominal total delay of 864 ps. The delay value is programmable
to a 9-bit resolution (that is, 0 to 432 decimal) via the MUDEL
register, resulting in a nominal resolution of 2 ps/LSB. Because a
time delay maps to a phase offset for a fixed clock frequency,
the control loop essentially compares the phase relationship
between the two clock domains and adjusts the phase (that is, via a
tapped delay line) of the digital clock such that it is at the desired
fixed phase offset (SET_PHS) from the critical analog clock.
18
16
GUARD
14
BAND
12
10
DESIRED
PHASE
8
MU PHASE
6
4
2
0
0 40 80 120 160 200 240 280 320 360 400 440
SEARCH START ING
LOCATION
Figure 49. Typical Mu Phase Characteristic Plot at 2.4 GSPS
MU
DELAY
MU DELAY
14-BI
DATA
PHASE
DETECTOR
ANALOG
CIRCUITRY
IOUTP
IOUTN
GUARD
BAND
07851-048
07851-049
Figure 49 maps the typical mu phase characteristic at 2.4 GSPS vs.
the 9-bit digital delay setting (MUDEL). The mu phase scaling
is such that a value of 16 corresponds to 180 degrees. The critical
keep-out window between the digital and analog domains occurs
at a value of 0 (but can extend out to 2 depending on the clock
rate). The target mu phase (and slope) is selected to provide
optimum ac performance while ensuring that the mu controller
for any device can establish and maintain lock. For example,
while a slope and phase setting of −6 is considered optimum
for operation between 1.6 GSPS and 2.5 GSPS, other values are
required below 1.6 GSPS.
18
NOM_P1
SLOW_P1
16
FAST_P1
14
12
10
8
MU PHASE
6
4
2
0
0 40 80 120 160 200 240 280 320 360 400 440
DELAY LINE TAP
07851-050
Figure 50. Mu Phase Characteristics of Three Devices from Different Process
Lots at 1.2 GSPS
The mu phase characteristics can vary significantly among devices
due to gm variations in the digital delay line that are sensitive to
process skews (along with temperature and supply). As a result,
careful selection of the target phase location is required such
that the mu controller can converge upon this phase location
for all devices. Figure 50 shows that mu phase characteristics of
three devices at 25°C from slow, nominal, and fast skew lots at
1.2 GSPS. Note that a −6 mu phase setting does not map to any
delay line tap setting for the fast process skew case; therefore,
another target mu phase is recommended at this clock rate.
Tabl e 28 provides a list of recommended mu phase/slope settings
over the specified clock range of the AD9739 based on the
considerations previously described. These values should be
used to ensure robust operation of the mu controller.
Table 28. Recommended Target Mu Phase Settings vs. Clock Rate
Clock Rate (GSPS) Slope MU Phase
0.8 − 6
0.9 − 4
1.0 + 5
1.1 + 8
1.2 + 12
1.3 − 12
1.4 − 10
1.5 − 8
1.6 to 2.5 − 6
Rev. B | Page 32 of 48

Data Sheet AD9739
After the mu controller completes its search and establishes lock
on the target mu phase, it attempts to maintain a constant timing
relationship between the two clock domains over the specified
temperature and supply range. If the mu controller requests a
mu delay setting that exceeds the tapped delay line range (that
is, <0 or >432), the mu controller can lose lock, causing possible
system disruption (that is, can generate IRQ or restart the search).
To avoid this scenario, symmetrical guard bands are recommended
at each end of the mu delay range. The guard band scaling is
such that one LSB of Guard[4:0] (Register 0x29) corresponds to
eight LSBs of MUDEL (Register 0x28). The recommended guard
band setting of 11 (that is, Register 0x29 = 0xCB) corresponds
to 88 LSBs, thus providing sufficient margin.
Mu Controller Initialization Description
The mu controller must be initialized and placed into track
mode as a first step in the SPI boot sequence. The following
steps are required for initialization of the mu controller. Note
that the AD9739 data sheet specifications and characterization
data are based on the following mu controller settings:
1. Turn on the phase detector with boost (Register 0x24 = 0x30).
2. Enable the mu delay controller duty-cycle correction
circuitry and specify the recommended slope for phase.
(that is, Register 0x25 = 0x80 corresponds to a negative slope).
3. Specify search/track mode with a recommended target
phase, SET_PHS, of 6 (for example) and an initial
MUDEL[8:0] setting of 216 (Register 0x27 = 0x46 and
Register 0x28 = 0x6C).
4. Set search tolerance to exact and retry if the search fails
its initial attempt. Also, set the guard band to the
recommended setting of 11 (Register 0x29 = 0xCB).
5. Set the mu controller tracking gain to the recommended
setting and enable the mu controller state machine
(Register 0x26 = 0x03).
Upon completion of the last step, the mu controller begins a
search algorithm that starts with an initial delay setting specified
by the MUDEL register (that is, 216, which corresponds to the
midpoint of the delay line). The initial search algorithm works
by sweeping through different mu delay values in an alternating
manner until the desired phase (that is, a SET_PHS of 4) is
exactly measured. When the desired phase is measured, the
slope of the phase measurement is then calculated and
compared against the specified slope (slope = negative).
If everything matches, the search algorithm is finished. If not,
the search continues in both directions until an exact match can
be found or a programmable guard band is reached in one of
the directions. When the guard band is reached, the search still
continues but only in the opposite direction. If the desired phase is
not found before the guard band is reached in the second direction,
the search changes back to the alternating mode and continues
looking within the guard band. The typical locking time for the mu
controller is approximately 180K DAC cycles (at 2 GSPS ~ 75 µs).
The search fails if the mu delay controller reaches the endpoints.
The mu controller can be configured to retry (Register 0x29, Bit 6)
the search or stop. For applications that have a microcontroller,
the preferred approach is to poll the MU_LKD status bit
(Register 0x2A, Bit 0) after the typical locking time has expired.
This method allows the system controller to check the status of
other system parameters (that is, power supplies and clock source)
before reattempting the search (by writing 0x03 to Register 0x26).
For applications that do not have polling capabilities, the mu
controller state machine should be reconfigured to restart the
search in hopes that the system’s condition that did not cause
locking on the first attempt has disappeared.
Once the mu delay value is found that exactly matches the desired
mu phase setting and slope (for example, 6 with a negative.
slope), the mu controller goes into track mode. In this mode,
the mu controller makes slight adjustments to the delay value
to track any variations between the two clock paths due to
temperature, time, and supply variations. Two status bits,
MU_LKD (Register 0x2A, Bit 0) and MU_LST (Register 0x2A,
Bit 1) are available to the user to signal the existing status control
loop. If the current phase is more than four steps away from the
desired phase, the MU_LKD bit is cleared, and if the lock
acquired was previously set, the MU_LST bit is set. Should the
phase deviation return to within three steps, the MU_LKD bit is
set again while the MU_LST is cleared. Note that this sort of event
may occur if the main clock input (that is, DACCLK) is disrupted
or the mu controller exceeds the tapped delay line range (that is,
<0 or >432).
If lock is lost, the mu controller has the option of remaining in
the tracking loop or resetting and starting the search again via
the CONTRST bit (Register 0x29, Bit 5). Continued tracking is
the preferred state because it is the least disruptive to a system
in which the
the mu delay and phase value by first setting the read bit high
(Register 0x26, Bit 3). Once the read bit is set, the MUDEL[8:0]
bits and the SET_PHS[4:0] bits (Register 0x27 and Register 0x28)
that the controller is currently using can be read.
AD9739 temporarily loses lock. The user can poll
Rev. B | Page 33 of 48

AD9739 Data Sheet
INTERRUPT REQUESTS
The AD9739 can provide the host processor with an interrupt
request output signal (IRQ) that indicates that one or more of the
AD9739 internal controllers have achieved lock or lost lock. These
controllers include the mu, data receiver, and synchronization
controllers. The host can then poll the IRQ status register
(Register 0x04) to determine which controller has lost lock.
The IRQ output signal is an active high output signal available
on Pin F13. If used, its output should be connected via a 10 kΩ
pull-up resistor to VDD33.
Each IRQ is enabled by setting the enable bits in Register 0x03,
which purposely has the same bit mapping as the IRQ status
bits in Register 0x04. Note that these IRQ status bits are set only
when the controller transitions from a false to true state. Therefore,
it is possible for the x_LCK_IRQ and x_LST_IRQ status bits to
be set when a controller temporarily loses lock but is able to
reestablish lock before the IRQ is serviced by the host. In this
case, the host should validate the present status of the suspect
controller by reading back its current status bits, which are
available in Register 0x21 and/or Register 0x2A. Based on the
status of these bits, the host can take appropriate action, if required,
to reestablish lock. To clear an IRQ after servicing, it is necessary to
reset relevant bits in Register 0x03 by writing 0 followed by
another write of 1 to reenable. A detailed diagram of the
interrupt circuitry is shown in Figure 51.
(PIN F13)
SPI ISR
READ DATA
SPI ADDRESS
INT
SOURCE
SPI
DATA
SCLK
D
INT(n)
Q
INT
SOURCE
IMR
Figure 51. Interrupt Request Circuitry
SPI WRITE
DATA = 1
07851-051
It is also possible to use the IRQ during the AD9739 initialization
phase after power-up to determine when the mu and data receiver
controllers have achieved lock. For example, before enabling the
mu controller, the MU_LCK_EN bit (Register 0x03, Bit 2) can be
set and the IRQ output signal monitored to determine when lock
has been established before continuing in a similar manner with
the data receiver controllers. Note that the relevant LCK bit should
be cleared before continuing to the next controller. After all
controllers are locked, the lost lock enable bits (that is, x_LST_EN)
should be set.
Table 29. Interrupt Request Registers
Address (Hex)
0x03
Bit Description
5 SYNC_LST_EN
4 SYNC_LCK_EN
3 MU_LST_EN
2 MU_LCK_EN
1 RCV_LST_EN
0 RCV_LCK_EN
0x04
5 SYNC_LST_IRQ
4 SYNC_LCK_IRQ
3 MU_LST_IRQ
2 MU_LCK_IRQ
1 RCV_LST_IRQ
0 RCV_LCK_IRQ
0x21
7 SYNC_TRK_ON
5 SYNC_LST
4 SYNC_LCK
3 RCVR_TRK_ON
1 RCVR_LST
0 RCVR_LCK
1 MU_LST 0x2A
0 MU_LKD
Rev. B | Page 34 of 48

Data Sheet AD9739
MULTIPLE DEVICE SYNCHRONIZATION
Synchronization of multiple AD9739s requires all of the devices
to have matching pipeline delays. This implies the DAC outputs
are time aligned to the same phase when all devices are fed with
the same data pattern at the same instance of time. The main
contributor to phase ambiguity between devices is from the
div-by-4 circuitry that drives the Rx data path and data controller
(see Figure 53). This phase ambiguity can result in a ±2 sample
offset between any two devices. Because the state of this internal
divider is unknown at power-up, a synchronization method that
phase aligns the digital paths of multiple AD9739s is required to
ensure matching pipeline delays.
Figure 52 shows a top-level diagram of multiple AD9739s
synchronized to each other with sample alignment of the
different data streams within the FPGA (or among multiple
FPGAs) being assumed. A common RF clock source is
distributed to each of the AD9739 devices via a dual clock
buffer (such as the ADCLK946) with matched PCB trace
lengths to each device to ensure matched propagation delays.
MATCHED DELAYS
One AD9739 is designated as the master providing a SYNC_OUT
reference clock (equal to f
/4) to itself as well as the other
DAC
AD9739 slave device’s SYNC_IN input. LVDS fanout buffers with
matched output delays are again used to distribute the SYNC_OUT
and DCO signals of the master to the slave devices and FPGAs,
respectively, thus ensuring tight time alignment. Note, in the
case of a single FPGA implementation (that is, I/Q application),
the DCO of the master can drive the FPGA directly.
After synchronization, the internal div-by-4 circuitry will have
equal phases that drive their respective LVDS controllers. Note,
the mu and data receiver controller of both devices must be
configured for the same SPI register settings (that is, SET_PHS
and DCI_DEL) upon SPI initialization such that controllers
converge to similar delays. To validate that delays are roughly
matched, the user can read back the delays of both devices (that is,
MUDEL and DCI_DEL) to determine if they are in an acceptable
window that accounts for slight mismatches between different
devices’ delay lines.
FPGA_1
MASTER
DCO
FPGA_2
1:N
LVDS
REPEATER
DCO DACCL K
AD9739
MASTER
DCI
SYNC_IN
DCO DACCL K
AD9739
SLAVE_1
DCI
SYNC_OUT
DCO DACCL K
AD9739
SLAVE_N
DCI
SYNC_OUT
SYNC_OUT
SYNC_IN
SYNC_IN
DCO
TO FPG A_2
TO OTHER FPG As
TO SLAVE_1
TO SLAVE_N
MATCHED DELAYS
MATCHED DELAYS
ADCLK346
1:N
LVD S
REPEATER
COMMON
CLOCK SOURCE
0.8GHz T O 2.0GH z
Figure 52. Functional Block Diagram of Two AD9739s Synchronized
Rev. B | Page 35 of 48
07851-052

AD9739 Data Sheet
DB0[13:0]
DB1[13:0]
DCI
SYNC_IN
SYNC_OUT
DB0
EVEN
DB0
ODD
DB1
EVEN
DB1
ODD
DELAY
STATE MACHI NE
TRACKING LOOP
RX DATA CONTROLL ER
SYNCHRONIZ ATION CONTROLLER
PHASE
COMPARISO N
0
DELAY
STATE MACHI NE
TRACKING LOOP
DELAY
90
180
270
PHZ MUX
TO DAC
4:1 MUX
DATA ASSMBLER
f
DISTRIBUT ION
90/270
f
/4
DAC
0
90
DIV-BY-4
0/180
PHASE
ROTATOR
SLAVE ONLY
DAC
Mu Delay
MU DELAY
f
DAC
DCO
Figure 53. Top Level Block Diagram of Synchronization Circuitry and Controller
Figure 53 shows a top-level diagram of the synchronization
controller (bottom) and how it interfaces to other digital
functional blocks within the AD9739. Note the following
observations of this top level diagram:
• Synchronization between multiple devices is achieved by
rotating the div-by-4 phases of the slave devices such that
they align with the master.
• For the slave devices, the sync controller compares the phase
alignment of the master’s SYNC_IN reference signal with
the initial 0
o
/90o outputs of the div-by-4 and then rotates
the div-by-4 phase until the SYNC_IN signal falls between
these phases.
• A reference signal common to all devices is required for
synchronization. The master device generates this signal by
providing a SYNC_OUT signal which is then distributed to
all the devices (including itself with tight time alignment)
as a SYNC_IN signal.
• Because the SYNC_IN signal has a defined relationship
between the div-by-4 phase of the master, the slave devices can
now align their respective div-by-4 phases to the SYNC_IN
phase thus ensuring phase alignment among all devices.
DIV-BY-4
07851-053
• It is not possible to manually rotate the div-by-4 phases of
the data path with the sync controller enabled. This can be
a problem at lower clock rates were one may desire to rotate
the div-by-4 phase to ensure locking of the data receiver
controller and/or achieve a more optimum DCI_DEL value.
• The DCO output signal is generated from a separate div-
by-4 circuit, and therefore, has a random phase upon each
startup. For this reason, the DCO of the master should be
distributed to all the FPGAs.
SYNC Controller Initialization Description
The sync controller of the master is enabled by writing 0x70 to
Register 0x10. Once enabled, a state machine automatically adjusts
the output delay of its SYNC_OUT signal such that the fed back
reference SYNC_IN signal is centered between the 0° and 90°
output phases associated with its div-by-4 circuit. Note that the
coarse delay is performed by shifting phases via PHZ MUX while
the fine delay that centers (and tracks) variation is done by a
variable delay line. The variable delay line tap size is 12 ps. Once
SYNC_IN is centered, the controller enters tracking mode such
that SYNC_IN remains centered despite possible system variations
in temperature and/or supply. Centering the SYNC_IN signal
on the master device ensures that the SYNC_IN signals of the slave
Rev. B | Page 36 of 48

Data Sheet AD9739
devices also remain centered between their respective div-by-4
phases; therefore, providing the greatest margin to absorb nonideal
timing skews. The following status bits are available in Register
0x21 indicating lock, lost-lock, and tracking: SYNC_LCK,
SYNC_LST and SYNC_TRK_ON.
The sync controller of the slave is enabled by writing 0x50 to
Register 0x10. Once enabled, the state machine compares the
reference SYNC_IN signal to the 0°/90° phase outputs of the
div-by-4 phase settings. If the SYNC_IN signal does not fall
between these phases, the state machine of the slave rotates the divby-4 phase setting until it does. To validate that phase alignment
has been achieved, the SYNC_IN_PH90 and SYNC_IN_PH0
status bits should read 1 and 0, respectively (that is, Register 0x0D,
Bits[5:4]). Note that the DCO and SYNC_OUT outputs of the
slave can be disabled via Register 0x01, Bit 5.
Synchronization Limitations
Ensuring consistent synchronization over production lots in
systems containing two or more AD9739s becomes increasingly
more challenging at the higher update rates because the timing
offset between adjacent phases of the div-by-4 output clock is
equal to 1/f
. For example, a DAC update of 2 GSPS corresponds
DAC
to a 500 ps period. If the SYNC_IN signal of an ideal master
device is positioned in the center of its div-by-4 0
o
and 90o phase
outputs, only ±250 ps of timing margin exists for the slave
devices. This ideal margin is actually reduced by quadrature
phase errors in the div-by-4 circuit of the master as well as its
ability to position the SYNC_IN exactly in the center of the 0°
and 90° output phases.
The timing margin is further eroded by the following sources:
• Master-to-slave device(s) mismatch in the propagation delays
in the mu delay clock path and SYNC_IN. Note that these
mismatches can be up to 100 ps between devices that are at
opposite extremes of the process corners.
• Quadrature phase errors in the div-by-4 outputs of the slave.
These sources of timing skews become more significant as the
DACCLK period is decreased (that is, clock rate is increased),
leaving less margin for timing skews external to the master-toslave device(s). Special consideration to PCB layout and selection
of clock distribution ICs are required to ensure minimum skew
between the distributed DACCLK and SYNC_IN signals. Note
that timing skews can quickly accumulate considering that the
propagation delay on an FR4 PCB is on the order of 170 ps/inch,
and that output-to-output skews on each clock distribution IC
can be as high as 25 ps.
The problem becomes more pronounced in multiboard
synchronization where clock signals (that is, DACCLK,
SYNC_OUT, and DCO) are distributed over a back plane to
multiple PCBs. Data alignment among the various data sources
is required when driven by phase aligned DCO signals that are
a buffered version of the master’s DCO. However, these data
sources (FPGAs) also have process, supply voltage, and
temperature sensitivities (PVTs) that can cause misalignment
among their respective DCI outputs.
Adding to this dilemma is that it also possible for the data
receiver controller of different AD9739s to converge on different
delay settings due to PVT variations of the delay line (even if
DCI inputs are exactly aligned). This can result in a four sample
pipeline mismatch between devices if the difference in absolute
delays exceeds a period of 4/f
. Recall that the controller searches
DAC
up/down for its first valid edge from its initial start value (that is,
DCI_DEL and SMP_DEL). While the initial start values between
devices should be made the same, different absolute time delays
due to PVT can cause devices to converge on different edges of
DCI above or below this initial start value. As a result, confirm
that DCI_DEL values between multiple devices are matched
sufficiently such that the absolute differences between the
readback DCI_DEL values do not exceed a data period (that is,
4/f
). If the difference exceeds a data period, modify the
DAC
DCI_DEL (and SMP_DEL) setting of the slave device so that its
start point is roughly ½ the difference between the master and
slave readback values.
Rev. B | Page 37 of 48

AD9739 Data Sheet
V
T
ANALOG INTERFACE CONSIDERATIONS
ANALOG MODES OF OPERATION
The AD9739 uses the quad-switch architecture shown in Figure 54.
The quad-switch architecture masks the code-dependent glitches
that occur in a conventional two-switch DAC. Figure 55 compares
the waveforms for a conventional DAC and the quad-switch
DAC. In the two-switch architecture, a code-dependent glitch
occurs each time the DAC switches to a different state (that is,
D1 to D2). This code-dependent glitching causes an increased
amount of distortion in the DAC. In a quad-switch architecture
(no matter what the codes are), there are always two switches
transitioning at each half clock cycle, thus eliminating the codedependent glitches. However, a constant glitch occurs at 2 ×
DACCLK because half of the internal switches change state on
the rising DACCLK edge, while the other half change state on
the falling DACCLK edge.
DD
DACCLK_x
DBx[13:0]
DACCLK_x
TWO-SWITCH
DAC OUTPUT
FOUR-SW ITCH
DAC OUTPUT
(NORMAL MODE)
Another attribute of the quad-switch architecture is that it also
enables the DAC core to operate in one of the following three
modes: normal mode, mix mode, and return-to-zero (RZ) mode.
The mode is selected via SPI Register 0x08, Bits[1:0] with
normal mode being the default value. In the mix mode, the
output is effectively chopped at the DAC sample rate. This has
the effect of reducing the power of the fundamental signal while
increasing the power of the images centered around the DAC
sample rate, thus improving the output power of these images.
The RZ mode is similar to the analog mix mode, except that the
intermediate data samples are replaced with midscale values.
CLK
VG1
V
2
G
1G4VG3VG2
LATCHES
V
G
3
V
G
V
4
G
IOUTP
IOUTN
Figure 54. AD9739 Quad-Switch Architecture
INPU
D1D2D3D4D
DATA
D1D2D3D4D
D1D2D3D4D
D6D7D8D9D
5
5
D6D7D8D9D
D6D7D8D9D
5
10
10
10
Figure 55. Two-Switch and Quad-Switch DAC Waveforms
V
07851-054
t
t
INPUT
DATA
DACCLK_x
FOUR-SW ITCH
DAC OUTPUT
(
f
MIX MODE)
S
FOUR-SW ITCH
DAC OUTPUT
(RETURN TO
ZERO MO DE)
D1D2D3D4D
D
3
D
D
2
D
1
–D
1
–D
2
–D
3
D1D2D3D4D
D6D7D8D9D
5
4
D
5
D
–D
6
5
–D
4
D6D7D8D9D
5
10
–D
8
–D
–D
6
D
7
–D
7
9
–D
10
t
D
10
D
9
D
8
t
10
07851-056
Figure 56. Mix-Mode and RZ DAC Waveforms
Figure 56 shows the DAC waveforms for both the mix mode
and the RZ mode. Note that the disadvantage of the RZ mode
is the 6 dB loss of power to the load because the DAC is only
functioning for ½ the DAC update period. This ability to change
modes provides the user the flexibility to place a carrier anywhere
in the first three Nyquist zones, depending on the operating
mode selected. Switching between the analog modes reshapes
the sinc roll-off inherent at the DAC output. The maximum
amplitude in all three Nyquist zones is impacted by this sinc
roll-off, depending on where the carrier is placed (see Figure 57).
As a practical matter, the usable bandwidth in the third Nyquist
zone becomes limited at higher DAC clock rates (that is, >2 GSPS)
when the output bandwidth of DAC core and the interface
network (that is, balun) contributes to additional roll-off.
FIRST
NYQUIST ZONE
0
–5
RZ MODE
–10
–15
07851-055
dBFS
–20
–25
–30
–35
0FS 1.50FS1.25FS1.00FS0.75FS0.50FS0.25FS
Figure 57. Sinc Roll-Off for Each Analog Operating Mode
SECOND
NYQUIST ZONE
MIX MODE
FREQUENCY (Hz)
NORMAL
MODE
THIRD
NYQUIST ZONE
07851-057
Rev. B | Page 38 of 48

Data Sheet AD9739
CLOCK INPUT CONSIDERATIONS
The quality of the clock source and its drive strength are
important considerations in maintaining the specified ac
performance. The phase noise and spur characteristics of the
clock source should be selected to meet the target application
requirements. Phase noise and spurs at a given frequency offset
on the clock source are directly translated to the output signal. It
can be shown that the phase noise characteristics of a reconstructed
output sine wave are related to the clock source by 20 × log10
(f
thermal and quantization effects, are negligible.
The AD9739 clock receiver provides optimum jitter performance
when driven by a fast slew rate originating from the LVPECL or
CML output drivers. For a low jitter sinusoidal clock source, the
ADCLK914 can be used to square-up the signal and provide a
CML input signal for the AD9739 clock receiver. Note that all
specifications and characterization presented in the data sheet
are with the ADCLK914 driven by a high quality RF signal
generator with the clock receiver biased at a 800 mV level. A
dc blocking capacitor is used between the clock driver output
and clock receiver input to allow for different dc bias levels.
To minimize signal loss for high clock rates, a high quality, dc
blocking RF capacitor is recommended.
Figure 60 shows a clock source based on the ADF4350 low phase
noise/jitter PLL. The ADF4350 can provide output frequencies
from 140 MHz up to 4.4 GHz with jitter as low as 0.5 ps rms.
) when the DAC clock path contribution, along with
OUT/fCLK
Each single-ended output can provide a squared-up output level
that can be varied from −4 dBm to +5 dBm allowing for >2 V p-p
output differential swings. The ADF4350 also includes an
additional CML buffer that can be used to drive another
AD9739 device.
4-BIT PM OS
IOUT ARRAY
CLKx_OFF SET
DACCLK_P
DACCLK_N
ESD
DIR_x = 0
CLKx_OFF SET
DIR_x = 0
4-BIT NMOS
IOUT ARRAY
Figure 58. Clock Input and Common-Mode Control
VDDC
VSSC
07851-060
The AD9739 clock receiver features the ability to independently
adjust the common-mode level of its inputs over a span of
±100 mV centered about its midsupply point (that is, VDDC/2)
as well as an offset for hysteresis purposes. Figure 58 shows the
equivalent input circuit of one of the inputs. ESD diodes are not
shown for clarity purposes. It has been found through
characterization that the optimum setting is for both inputs to
be biased at approximately 0.8 V. This can be achieved by writing a
0x0F (corresponding to a −15) setting to both cross controller
registers (that is, Register 0x22 and Register 0x23).
V
V
CC
EE
ADCLK914
Q
Q
50Ω 50Ω
1nF
100Ω
1nF
AD9739
DACCLK_P
DACCLK_N
07851-058
50Ω
50Ω
10nF
10nF
V
REF
V
T
D
D
50Ω 50Ω
Figure 59. ADCLK914 Interface to the AD9739 CLK Input
AD9739
DACCLK_P
DACCLK_N
07851-059
FREF
V
ADF4350
PLL
VCO
DIV-BY-2
N = 0 – 4
VCO
RF
OUT
N
RF
OUT
RF
OUT
RF
OUT
Figure 60. ADF4350 Interface to the AD9739 CLK Input
3.9nH
1.8V p-p
1nF
1nF
100Ω
A+
A–
A+
A–
Rev. B | Page 39 of 48

AD9739 Data Sheet
1.10
1.05
1.00
0.95
0.90
0.85
COMMON-MODE (V)
0.80
0.75
0.70
–15 –13 –11 –9 –7 –5 –3 –1 1 3 5 7 9 11 13 15
OFFSET CODE
CLKP
CLKN
07851-061
Figure 61. Common-Mode Voltage with Respect to
CLKP_OFFSET/CLKN_OFFSET and DIR_P/DIR_N
VOLTAGE REFERENCE
The AD9739 output current is set by a combination of digital
control bits and the I120 reference current, as shown in Figure 62.
AD9739
V
BG
1.2V
1nF
VREF
I120
10kΩ
AGND
–
+
I120
Figure 62. Voltage Reference Circuit
The reference current is obtained by forcing the band gap voltage
across an external 10 kΩ resistor from I120 (Pin B14) to ground.
The 1.2 V nominal band gap voltage (VREF) generates a 120 µA
reference current in the 10 kΩ resistor. Note the following
constraints when configuring the voltage reference circuit:
• Both the 10 kΩ resistor and 1 nF bypass capacitor are required
for proper operation.
• Adjusting the output full-scale current, I
from its default setting of 20 mA should be performed
digitally.
• The AD9739 is not a multiplying DAC. Modulating the
reference current, I120, with an ac signal is not supported.
• The band gap voltage appearing at VREF (Pin C14) must
be buffered for use with external circuitry because its
output impedance is approximately 5 kΩ.
• An external reference can be used to overdrive the internal
reference by connecting it to VREF (Pin C14).
I
can be adjusted digitally over 8.7 mA to 31.7 mA by using
OUTFS
FSC[9:0] (Register 0x06 and Register 0x07).
FSC[9:0]
CURRENT
SCALING
DAC
IFULL -SCALE
, of the DAC
OUTFS
07851-062
The following equation relates I
to the FSC[9:0] register,
OUTFS
which can be set from 0 to 1023:
I
= 22.6 × FSC[9:0]/1000 + 8.7 (1)
OUTFS
Note that a default value of 0x200 generates 20 mA full scale,
which is used for most of the characterization presented in this
data sheet (unless noted otherwise).
ANALOG OUTPUTS
Equivalent DAC Output and Transfer Function
The AD9739 provides complementary current outputs, IOUTP
and IOUTN, that source current into an external ground reference
load. Figure 63 shows an equivalent output circuit for the DAC.
Note that, compared to most current output DACs of this type,
the AD9739 outputs exhibit a slight offset current (that is,
I
/16), and the peak differential ac current is slightly below
OUTFS
I
/2 (that is, 15/32 × I
OUTFS
I
OUTFS
I
PEAK
15/32 × I
Figure 63. Equivalent DAC Output Circuit
As shown in Figure 63, the DAC output can be modeled as a pair of
dc current sources that source a current of 17/32 × I
output. A differential ac current source, I
the signal-dependent nature of the DAC output. The polarity
and signal dependency of this ac current source are related to
the digital code by the following equations:
F(Code) = (DACCODE − 8192)/8192 (2)
−1 ≤ F(Code) < 1 (3)
where DACCODE = 0 to 16,383 (decimal).
Because I
can swing ±(15/32) × I
PEAK
measured at IOUTP and IOUTN can span from I
I
. However, because the ac signal-dependent current
OUTFS
component is complementary, the sum of the two outputs is
always constant (that is, IOUTP + IOUTN = (34/32) × I
The code-dependent current measured at the IOUTP (and
IOUTN) output is as follows:
IOUTP = 17/32 × I
IOUTN = 17/32 × I
OUTFS
= 8.6 – 31.2mA
17/32 × I
=
OUTFS
17/32 × I
OUTFS
OUTFS
).
OUTFS
AC
70Ω
OUTFS
OUTFS
+ 15/32 × I
− 15/32 × I
2.2pF
07851-063
to each
OUTFS
is used to model
PEAK,
, the output currents
/16 to
OUTFS
OUTFS
× F(Code) (4)
OUTFS
× F(Code) (5)
OUTFS
).
Rev. B | Page 40 of 48

Data Sheet AD9739
Figure 64 shows the IOUTP vs. DACCODE transfer function
when I
is set to 19.65 mA.
OUTFS
20
18
16
14
12
10
8
6
OUTPUT CURRENT (mA)
4
2
0
0 4096 8192 12,288
DAC CODE
Figure 64. Gain Curve for FSC[9:0] = 512, DAC Offset = 1.228 mA
16,384
07851-064
Peak DAC Output Power Capability
The maximum peak power capability of a differential current
output DAC is dependent on its peak differential ac current, I
PEAK
,
and the equivalent load resistance it sees. Because the AD9739
includes a differential 70 resistance, it is best to use a doubly
terminated external output network similar to what is shown in
Figure 65. In this case, the equivalent load seen by the ac current
source of the DAC is 25 .
I
= 8.6 – 31.2mA
OUTFS
If the AD9739 is programmed for I
current is 9.375 mA and its peak power delivered to the equivalent
load is 2.2 mW (that is, P = I
2
R). Because the source and load
resistance seen by the 1:1 balun are equal, this power is shared
equally; therefore, the output load receives 1.1 mW or 0.4 dBm.
To calculate the rms power delivered to the load, the following
must be considered:
• Peak-to-rms of the digital waveform
• Any digital backoff from digital full scale
• The DAC’s sinc response and nonideal losses in external
network
For example, a reconstructed sine wave with no digital backoff
ideally measures −2.6 dBm because it has a peak-to-rms ratio of
3 dB. If a typical balun loss of 0.4 dBm is included, −3 dBm of
actual power can be expected in the region where the sinc response
of the DAC has negligible influence. Increasing the output power is
best accomplished by increasing I
linearity performance must be considered acceptable for the
target application.
R
SOURCE
= 50Ω
= 20 mA, its peak ac
OUTFS
, although any degradation in
OUTFS
LOSSLESS
BALUN
1:1
15/32 × I
I
PEAK
OUTFS
=
AC
70Ω
180Ω
Figure 65. Equivalent Circuit for Determining Maximum Peak Power to a 50 Ω Load
R
LOAD
= 50Ω
07851-065
Rev. B | Page 41 of 48

AD9739 Data Sheet
Output Stage Configuration
The AD9739 is intended to serve high dynamic range applications
that require wide signal reconstruction bandwidth (that is,
DOCSIS CMTS) and/or high IF/RF signal generation. Optimum ac
performance can only be realized if the DAC output is configured
for differential (that is, balanced) operation with its output
common-mode voltage biased to analog ground. The output
network used to interface to the DAC should provide a near 0
dc bias path to analog ground. Any imbalance in the output
impedance between the IOUTP and IOUTN pins results in
asymmetrical signal swings that degrade the distortion
performance (mostly even order) and noise performance.
Component selection and layout are critical in realizing the
performance potential of the AD9739.
MINI-CIRCUITS
IOUTP
90Ω
70Ω
IOUTN
90Ω
TC1-33-75G+
Figure 66. Recommended Balun for Wideband Applications with Upper
Bandwidths of up to 2.2 GHz
®
07851-066
Most applications requiring balanced-to-unbalanced conversion can
take advantage of the Ruthroff 1:1 balun configuration shown in
Figure 66. This configuration provides excellent amplitude/phase
balance over a wide frequency range while providing a 0 dc bias
path to each DAC output. Also, its design provides exceptional
bandwidth and can be considered for applications requiring
signal reconstruction of up to 2.2 GHz. The characterization plots
shown in this data sheet are based on the AD9739 evaluation
board, which uses this configuration. Figure 67 compares the
measured frequency response for normal and mix mode using
the AD9739 evaluation board vs. the ideal frequency response.
0
–3
BASEBAND
TC1-33-75G
–6
–9
–12
–15
–18
–21
POWER (d Bc)
–24
–27
–30
–33
–36
0 500 1000 1500 2000 2500 3000 3500
Figure 67. Measured vs. Ideal Frequency Response for Normal (Baseband)
and Mix Mode Operation Using a TC1-33-75G Transformer on the AD9739
IDEAL BASEBAND MODE
IDEAL MIX MODE
FREQUENC Y (MHz)
Evaluation Board
MIX MODE
TC1-33-75G
07851-067
Figure 68 shows an interface that can be considered when
interfacing the DAC output to a self-biased differential gain
block. The inductors shown serve as RF chokes (L) that provide
the dc bias path to analog ground. The value of the inductor,
along with the dc blocking capacitors (C), determines the lower
cutoff frequency of the composite pass-band response. An RF
balun should also be considered before the RF differential gain
stage and any filtering to ensure symmetrical common-mode
impedance seen by the DAC output while suppressing any
common-mode noise, harmonics, and clock spurs prior to
amplification.
IOUTP
90Ω
70Ω
90Ω
IOUTN
Figure 68. Interfacing the DAC Output to the Self-Biased Differential Gain Stage
OPTIO NAL BALUN AND FI LTER
L
L
LPF
C
C
RF DIFF
AMP
For applications operating the AD9739 in mix mode with output
frequencies extending beyond 2.2 GHz, the circuits shown in
Figure 69 should be considered. The circuit in Figure 69 uses a
wideband balun with a configuration similar to the one shown
in Figure 68 to provide a dc bias path for the DAC outputs. The
circuit in Figure 70 takes advantage of ceramic chip baluns to
provide a dc bias path for the DAC outputs while providing
excellent amplitude/phase balance over a narrower RF band.
These low cost, low insertion loss baluns are available for
different popular RF bands and provide excellent amplitude/
phase balance over their specified frequency range.
MINI-CIRCUITS
C
IOUTP
IOUTN
70Ω
90Ω
90Ω
L
L
TC1-1-462M
C
07851-069
Figure 69. Recommended Mix Mode Configuration Offering Extended RF
Bandwidth Using a TC1-1-43A+ Balun
MURATA
JOHANSON TECHNOLOGY
IOUTP
IOUTN
70Ω
180Ω
CHIP BALU NS
07851-070
Figure 70. Lowest Cost and Size Configuration for Narrow RF Band Operation
07851-068
Rev. B | Page 42 of 48

Data Sheet AD9739
NONIDEAL SPECTRAL ARTIFACTS
The AD9739 output spectrum contains spectral artifacts that
are not part of the original digital input waveform. These nonideal artifacts included harmonics (including alias harmonics),
images, and clock spurs. Figure 71 shows a spectral plot of the
AD9739 within the first Nyquist zone (that is, dc to f
reconstructing a 650 MHz, 0 dBFS sine wave at 2.4 GSPS. Besides
the desired fundamental tone at the −7.8 dBm level, the spectrum
also reveals these nonideal artifacts that also appear as spurs
above the measurement noise floor. Because these nonideal
artifacts are also evident in the second and third Nyquist zones
during mix mode operation, the effects of these artifacts should
also be considered when selecting the DAC clock rate for a
target RF band.
0
–10
–20
–30
–40
–50
f
/4 –
DAC
–60
f
POWER ( dBc)
–100
OUT
–70
–80
–90
HD4
0 200 400 600 800 1000 1 200
FUND AT
–7.6dBm
f
/2 –
DAC
f
/4
DAC
f
OUT
HD3
FREQUENCY (MHz)
Figure 71. Spectral Plot
3/4 ×
HD5
HD6
Note the following important observations pertaining to these
nonideal spectral artifacts:
1. A full-scale sine wave (that is, single-tone) typically represents
the worst-case condition because it has a peak-to-rms ratio of
3 dB and is unmodulated. Harmonics and aliased harmonics
of a sine wave are easy to identify because they also appear
as discrete spurs. Significant characterization of a high
speed DAC is performed using single (or multitone)
signals for this reason.
2. Modulated signals (that is, AM, PM, or FM) do not appear as
spurs but rather as signals whose power spectral density is
spread over a defined bandwidth determined by the
modulation parameters of the signals. Any harmonics from
the DAC spread over a wider bandwidth determined by the
order of the harmonic and bandwidth of the modulated signal.
For this reason, harmonics often appear as slight bumps in
the measurement noise floor and can be difficult to discern.
f
f
OUT
HD9
DAC
HD2
DAC
/4 –
/2)
07851-071
3. Images appear as replicas of the original signal, therefore,
can be easier to identify. In the case of the AD9739, internal
modulation of the sampling clock at intervals related to
f
/4 generate image pairs at ¼ × f
DAC
DAC
, ½ × f
, and ¾ × f
DAC
DAC
Both upper and lower sideband images associated with ¼ ×
f
fall within the first Nyquist zone, while only the lower
DAC
image of ½ × f
and ¾ × f
DAC
fall back. Note that the lower
DAC
images appear frequency inverted. The difference in dBc
between the fundamental and various images remains
mostly signal independent because the mechanism causing
these images is related to corruption of the sampling clock.
4. The magnitude of these images for a given device is dependent
on several factors including DAC clock rate, output frequency,
mu controller phase setting, and div-by-4 clock divider
phase (Register 0x14, bit [7:6]. Tab le 3 0 shows how the
magnitude of these images vary as the phase is varied for
the case represented in Figure 71. Because the phase varies
at power up, the image magnitude varies making it difficult
to compensate digitally through a one-time factory
calibration procedure. Also, the image magnitude can vary
a few decibels over temperature and between devices due
to process dependencies. (Note that the AD9739A is a
viable option if factory calibration is considered acceptable
for nonmultichip synchronization applications operating
with clock rates in the 1.6 GSPS to 2.5 GSPS range).
Table 30. Image Magnitude vs. Phase (PHZ) Setting
Image location PHZ0 PHZ1 PHZ2 PHZ3
f
/4 − f
DAC
f
/2 − f
DAC
¾ × f
5. A clock spur appears at f
−70.2 −71.4 −72.2 −77.1
OUT
−80.2 −71.3 −69.9 −74.9
OUT
− f
DAC
−69.9 −72.5 −73.4 −73.7
OUT
/4 and integer multiples of this
DAC
frequency. Similar to images, the spur magnitude is also
dependent on the same factors that cause variations in
image levels. However, unlike images and harmonics, clock
spurs always appear as discrete spurs, albeit their magnitude
shows a slight dependency on the digital waveform and
output frequency. Note that the clock spur appearing at f
DAC
can also be factory calibrated.
6. A large clock spur also appears at 2 × f
in either normal
DAC
or mix mode operation. This clock spur is due to the quad
switch DAC architecture causing switching events to occur
on both edges of f
DAC
.
.
/4
Rev. B | Page 43 of 48

AD9739 Data Sheet
LAB EVALUATION OF THE AD9739
Figure 72 shows a recommended lab setup that was used to
characterize the performance of the AD9739. The DPG2 is a
dual port LVDS/CMOS data pattern generator available from
Analog Devices, Inc., with an up to 1.25 GSPS data rate. The
DPG2 directly interfaces to the AD9739 evaluation board via
Tyco Z-PACK HM-Zd connectors. A low phase noise/jitter RF
source, such as an R&S SMA100A signal generator, is used for
the DAC clock. A 5 V power supply is used to power up the
AD9739 evaluation board, and SMA cabling is used to interface
to the supply, clock source, and spectrum analyzer. A USB 2.0
interface to a host PC is used to communicate to both the AD9739
evaluation board and the DPG2.
A high dynamic range spectrum analyzer is required to evaluate
the AD9739 reconstructed waveform’s ac performance. This is
especially the case when measuring ACLR performance for high
dynamic range applications, such as multicarrier DOCSIS CMTS
applications. Harmonic, SFDR, and IMD measurements pertaining
to unmodulated carriers can benefit by using a sufficiently high
RF attenuation setting because these artifacts are easy to identify
above the spectrum analyzer noise floor. However, reconstructed
waveforms having modulated carrier(s) often benefit from the
use of a high dynamic range RF amplifier and/or passive filters
to measure close-in and wideband ACLR performance when
using spectrum analyzers of limited dynamic range.
RHODE AND
SCHWARTZ
SMA 100A
10 MHz
REFIN
ADI PATTERN G ENERATOR
DCO
1.6GHz TO
2.5GHz
3dBm
DPG2
LVDS
DATA
AND DCI
AD9739
EVAL. BOARD
10 MHz
REOUT
Figure 72. Lab Test Setup Used to Characterize the AD9739
USB 2.0
POWER
SUPPLY
+5V
LAB
PC
AGILENT PSA
E4440A
GPIB
07851-072
POWER DISSIPATION AND SUPPLY DOMAINS
The power dissipation of the AD9739 is dependent on the DAC
clock rate as shown in Figure 73 and Figure 74. The current
consumption from the 3.3 V supply remains relatively constant
because it is used for biasing the DAC core (that is, VDDA) and
differential input receivers (that is, VDD33). However, the current
consumption from the 1.8 V supply is clock rate dependent and
increases linearly with frequency because this supply is used by
the digital path (that is, VDD) as well as the clock distribution
circuitry (that is, VDDC).
Treat the VDDC supply as an analog supply because the clock
distribution circuitry has poor power supply rejection; therefore,
noise on this supply can induce clock jitter. To ensure low noise
on this sensitive supply, use a separate 1.8 V regulator powered
from the 3.3 V analog supply rail that is also used to power
VDDA. This supply rail can also be used to power-up VDD33
via an LC filter network. The digital 1.8 V supply, VDD, can be
supplied via a well-filtered switching regulator.
1.2
1.1
1.0
0.9
0.8
0.7
0.6
0.5
POWER (W)
0.4
0.3
0.2
0.1
0
0 250 500 750 1000 1250 1500 1750 2000 2250 2500
f
DAC
Figure 73. Power Consumption vs. f
360
330
300
270
240
210
180
150
CURRENT (mA)
120
90
60
30
0
0 250 500 750 1000 1250 1500 1750 2000 2250 2500
f
DAC
Figure 74. Current Consumption vs. f
(MHz)
I_VDD
I_VDDA
I_VDD33
(MHz)
TOTAL
VDD
VDDA
VDD33
DAC
I_VDDC
DAC
VDDC
@ 25°C
@ 25°C
07851-073
07851-074
Rev. B | Page 44 of 48

Data Sheet AD9739
RECOMMENDED START-UP SEQUENCE
Upon power-up of the AD9739, a host processor is required
to initialize and configure the AD9739 via its SPI port. Figure 75
shows a flowchart of the sequential steps required, while Tab le 3 1
and Tabl e 32 provides more detail on the SPI register write/read
operations required to implement the flowchart steps. Note the
following:
• A software reset is optional because the AD9739 has both
an internal POR circuit and a RESET pin.
• The SYNC controller is optional because it is only required
to synchronize two or more devices. If synchronization is
required, validate that DCI_DEL values between devices
are sufficiently matched.
• The mu controller must be first enabled (and in track mode)
before the data receiver controller is enabled because the
DCO output signal is derived from this circuitry.
• A wait period is related to f
DATA
periods.
• Limit the number of attempts to lock the controllers to
three; locks typically occur on the first attempt.
• Hardware or software interrupts can be used to monitor
the status of the controllers.
CONFIGURE
SPI PORT
SOFTWARE
RESET
SET CLK
INPUT CMV
CONFIGURE
MU CONT.
WAIT A
FEW 100µs
MU CONT.
LOCKED?
YES YES YES
NO
CONFIGURE
SYNC
CONT.
WAIT A
FEW 100µs
SYNC CONT.
VAL ID?
NO
CONFIGURE
Rx DATA
CONT.
WAIT A
FEW 100µs
Rx
DATA CONT.
LOCKED?
NO
COMPARE
DCI_DEL
VALU ES
RECONFIG URE
TxDAC FROM
DEFAULT SETTING
OPTIONAL
SYNC.
ONLY
07851-075
Figure 75. Flowchart for Initialization and Configuration of the AD9739
Rev. B | Page 45 of 48

AD9739 Data Sheet
Table 31. Recommended SPI Initialization with SYNC Controller Disabled
Step Address (Hex) Write Value Comments
1 0x00 0x00
2 0x00 0x20 Software reset to default SPI values.
3 0x00 0x00 Clear the reset bit.
4 0x22 0x0F
5 0x23 0x0F
6 0x24 0x30
7 0x25 0x80
8 0x27 0x44
9 0x28 0x6C
10 0x29 0xCB
11 0x26 0x02
12 0x26 0x03 Enable the mu controller search and track mode.
13 Not applicable Not applicable Wait for 160 K × 1/f
14 0x2A
15 Not applicable Not applicable Ensure that the AD9739 is fed with DCI clock input from the data source.
16 0x13 0x72 Set FINE_DEL_SKEW to 2.
17 0x10 0x00 Disable the data Rx controller before enabling it.
18 0x10 0x02 Enable the data Rx controller for loop and IRQ.
19 0x10 0x03 Enable the data Rx controller for search and track mode.
20 Not applicable Not applicable Wait for 135 K × 1/f
21 0x21
22 0x06, 0x07 0x00, 0x02 Optional: modify the TxDAC I
23 0x08 0x00 Optional: modify the TxDAC operation mode (the default is normal mode).
Configure for the 4-wire SPI mode with MSB. Note that Bits[7:5] must be mirrored onto
Bits[2:0] because the MSB/LSB format can be unknown at power-up.
Set the common-mode voltage of DACCLK_P and DACCLK_N inputs.
Configure the mu controller. Refer to Ta ble 28 for recommended target mu slope and
phase settings vs. clock rate.
cycles.
DATA
Read back Register 0x2A and confirm that it is equal to 0x01 to ensure that the DLL loop
is locked. If it is not locked, proceed to Step 10 and repeat. Limit attempts to three
before breaking out of the loop and reporting a mu lock failure.
cycles.
DATA
Read back Register 0x21 and confirm that it is equal to 0x09 to ensure that the DLL loop
is locked and tracking. If it is not locked and tracking, advance the CLKDIVPH[1:0] phase
in Register 0x14, Bit[7:6] before proceeding to Step 17 to repeat attempt. Limit attempts
to three before breaking out of the loop and reporting an Rx data lock failure.
setting (the default is 20 mA).
OUTFS
Rev. B | Page 46 of 48

Data Sheet AD9739
Table 32. Recommended SPI Initialization with SYNC Controller Enabled
Step Address (Hex) Write Value Comments
1 0x00 0x00
2 0x00 0x20 Software reset to default SPI values.
3 0x00 0x00 Clear the reset bit.
4 0x22 0x0F
5 0x23 0x0F
6 0x24 0x30
7 0x25 0x80
8 0x27 0x44
9 0x28 0x6C
10 0x29 0xCB
11 0x26 0x02
12 0x26 0x03 Enable the mu controller search and track mode.
13 Not applicable Not applicable Wait for 160 K × 1/f
14 0x2A
15 0x15 0x42 Configure sync controller.
16 0x10 0x00 Disable sync controller before enabling it.
17 0x10 0x60 or 0x40 Enable sync controller for loop and IRQ.
0x60 = master mode.
0x40 = slave mode.
18 0x10 0x70 or 0x50 Enable sync controller:
0x70 = master mode.
0x50 = slave mode.
19 Not applicable Not applicable Wait for 160 K × 1/f
20 0x21 Read back Register 0x21 to confirm proper operation:
0x90 = master mode.
0x00 = slave mode.
21 0x0D
22 Not applicable Not applicable Ensure that the AD9739 is fed with DCI clock input from the data source.
23 0x13 0x72 Set FINE_DEL_SKEW to 2.
24 0x10 0x00 Disable the data Rx controller before enabling it.
25 0x10 0x02 Enable the data Rx controller for loop and IRQ.
26 0x10 0x03 Enable the data Rx controller for search and track mode.
27 Wait for 135 K × 1/f
28 0x21
29 Not applicable Not applicable
30 0x06, 0x07 0x00, 0x02 Optional: modify the TxDAC I
31 0x08 0x00 Optional: modify the TxDAC operation mode (the default is normal mode).
Configure for the 4-wire SPI mode with MSB. Note that Bits[7:5] must be mirrored onto
Bits[2:0] because the MSB/LSB format can be unknown at power-up.
Set the common-mode voltage of DACCLK_P and DACCLK_N inputs.
Configure the mu controller. Refer to Ta ble 28 for recommended target Mu slope and
phase settings vs. clock rate.
cycles.
DATA
Read back Register 0x2A and confirm that it is equal to 0x01 to ensure that the DLL loop
is locked. If it is not locked, proceed to Step 10 and repeat. Limit attempts to three
before breaking out of the loop and reporting a mu lock failure.
for DLL to lock.
DATA
If not, proceed to Step 15 and repeat. Limit to three attempts before breaking out of
loop and reporting sync lock failure.
Read back Register 0x0D and confirm Bits[5:4] = 10. If not, proceed to Step 2 and repeat.
Limit to three attempts before breaking out of loop and reporting sync lock failure.
cycles.
DATA
Read back Register 0x21 and confirm that it is equal to 0x09 to ensure that the DLL loop
is locked and tracking. If it is not locked and tracking, proceed to Step 16 and repeat.
Limit attempts to three before breaking out of the loop and reporting an Rx data lock
failure.
Readback DCI_DEL value in Register 0x13 and Register 0x14 for master and. If slave
devices are not within 40 codes of each other, re-specify target DCI_DEL value to be
average between master and readback DCI_DEL value.
setting (the default is 20 mA).
OUTFS
Rev. B | Page 47 of 48

AD9739 Data Sheet
OUTLINE DIMENSIONS
12.10
A1 BALL
CORNER
12.00 SQ
11.90
TOP VIEW
10.40
BSC SQ
0.80
BSC
11
141312
BOTTOM VIEW
10 876
3219
5
4
A
B
C
D
E
F
G
H
J
K
L
M
N
P
A1 BALL
CORNER
1.00 MAX
0.85 MIN
COPLANARIT Y
0.12
11-18 -2011- A
1.40 MAX
DETAIL A
COMPLI ANT WIT H JEDEC STANDARDS MO-275-GG AA-1.
0.43 MAX
0.25 MIN
SEATING
PLANE
DETAIL A
0.55
0.50
0.45
BALL DIAME TER
Figure 76. 160-Ball Chip Scale Package Ball Grid Array [CSP_BGA]
(BC-160-1)
Dimensions shown in millimeters
ORDERING GUIDE
Model1 Temperature Range Package Description Package Option
AD9739BBCZ −40°C to +85°C 160-Ball Chip Scale Package Ball Grid Array [CSP_BGA] BC-160-1
AD9739BBCZRL −40°C to +85°C 160-Ball Chip Scale Package Ball Grid Array [CSP_BGA] BC-160-1
AD9739BBC −40°C to +85°C 160-Ball Chip Scale Package Ball Grid Array [CSP_BGA] BC-160-1
AD9739BBCRL
AD9739-R2-EBZ Evaluation Board
1
Z = RoHS Compliant Part.
−40°C to +85°C 160-Ball Chip Scale Package Ball Grid Array [CSP_BGA] BC-160-1
©2009–2012 Analog Devices, Inc. All rights reserved. Trademarks and
registered trademarks are the property of their respective owners.
D07851-0-1/12(B)
Rev. B | Page 48 of 48
 Loading...
Loading...