

14/12/10-Bit, 1200 MSPS
D/A Converters
Preliminary Technical Data AD9736/AD9735/AD9734
FEATURES
• 1.8/3.3 V Dual Supply Operation
• AD9736 SFDR > 53 dBc to f
• AD9736 IMD > 65 dBc to f
= 600 MHz
OUT
= 600 MHz
OUT
• AD9736 DNL = ± 1.0 LSB
• AD9736 INL = ± 2.0 LSB
• Low power: 380 mW (I
= 20 mA; f
OUTFS
= 330 MHz)
OUT
• LVDS data interface with on-chip 100 Ω terminations
• Analog Output: Adjustable 10-30mA (RL=25 Ω to 50 Ω)
• On-Chip 1.2 V Reference
• 160 pin BGA Package
APPLICATIONS
• Instrumentation
• Automatic Test Equipment
• RADAR
• Avionics
• Wideband Communications Systems:
Point-to-Point Wireless
LMDS
PA Linearization
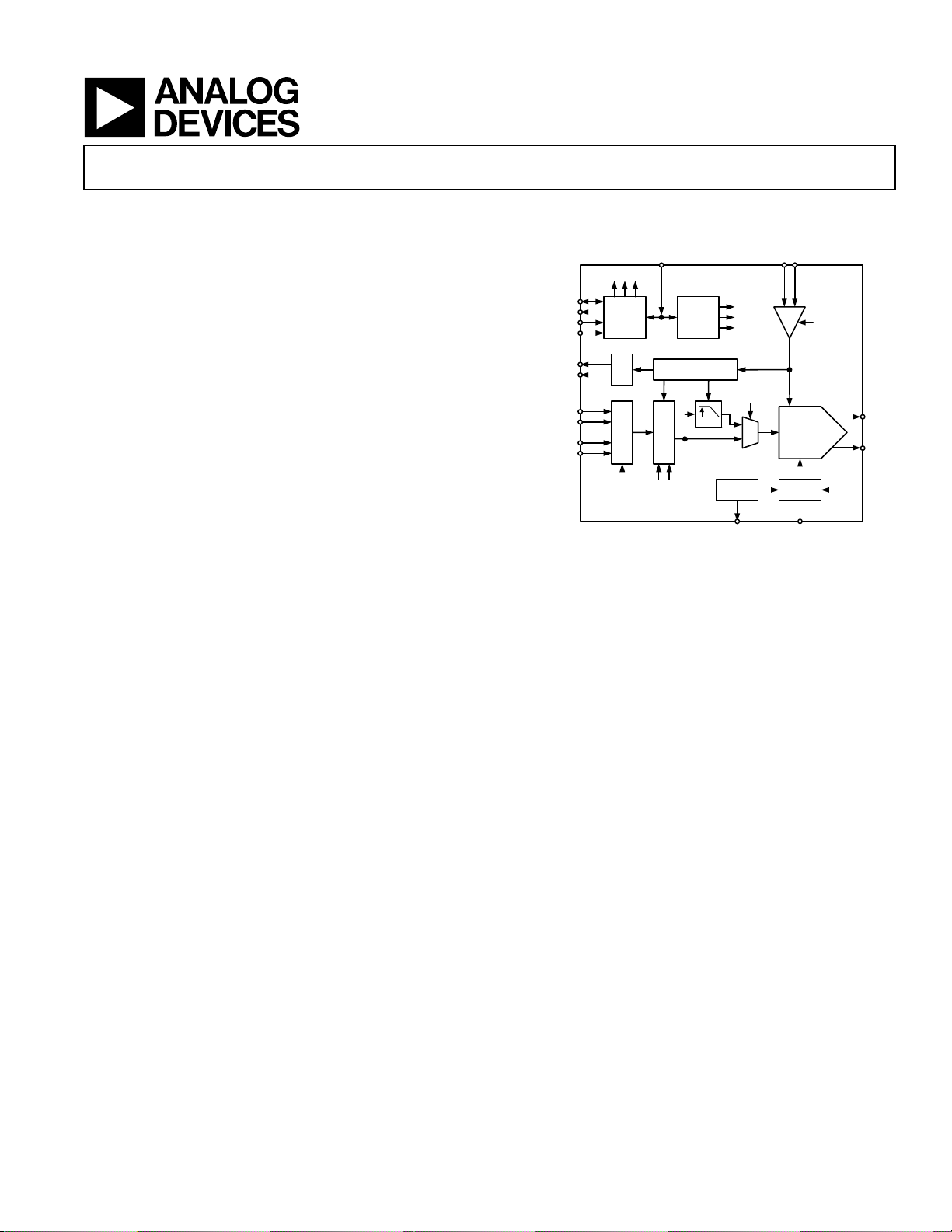
PRODUCT DESCRIPTION
FUNCTIONAL BLOCK DIAGRAM
CLK-
CLK+
14,12,10-Bit
DAC
Reference
Current
RSET
C3
S2
SDO
CSB
SCLK
DATACLK_OUT+
DATACLK_OUT-
DATACLK_IN+
DATACLK_IN-
DB[13:0]+
DB[13:0]-
RESET
S1 S2 S3
SDI
SPI
LVDS
Driver
LVDSReceiver
C2 C1 S1
Controller
Clock Distribution
Synchronization
Figure 1. Functional Block Diagram
C1
C2
C3
S3
2X
Bandgap
VREF
PRODUCT HIGHLIGHTS
Ultra-low Noise and Intermodulation Distortion (IMD) enable
high quality synthesis of wideband signals at intermediate
frequencies up to 600 MHz.
IOUTA
IOUTB
The AD9736, AD9735, and AD9734 are high performance, high
frequency DACs that provide sample rates of up to 1200 MSPS,
permitting multi-carrier generation up to their Nyquist frequency.
The AD9736 is the 14 bit member of the family, while the AD9735
and the AD9734 are the 12 and 10 bit members, respectively. They
include a serial peripheral interface (SPI) port that provides for
programming many internal parameters and also enables read-back
of status registers. They use a reduced specification LVDS interface
to minimize data interface noise that may degrade performance.
The output current can be programmed over a range of 10mA to
30mA. The AD9736 family is manufactured on a 0.18µm CMOS
process and operates from 1.8V and 3.3V supplies for a total power
consumption of 380mW in bypass mode. It is supplied in a 160 pin
BGA package for reduced package parasitics.
Rev. PrJ 9/7/2004
Information furnished by Analog Devices is believed to be accurate and reliable.
However, no responsibility is assumed by Analog Devices for its use, nor for any
infringements of patents or other rights of third parties that may result from its
use. No license is granted by implication or otherwise under any patent or patent
rights of Analog Devices. Trademarks and registered trademarks are the property
of their respective companies.
Double Data Rate (DDR) LVDS data receivers support the
maximum conversion rate of 1200 MSPS.
Direct pin programmability of basic functions or SPI port access
for complete control of all AD9736 family functions.
Manufactured on a CMOS process, the AD9736 family uses a
proprietary switching technique that enhances dynamic
performance.
The current output(s) of the AD9736 family can be easily
configured for various single-ended or differential circuit
topologies.
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781.329.4700 www.analog.com
Fax: 781.326.8703 © 2004 Analog Devices, Inc. All rights reserved.

AD9736/AD9735/AD9734 Preliminary Technical Data
TABLE OF CONTENTS
AD9736/AD9735/AD9734—Specifications ........................................3
DC SPECIFICATIONS ......................................................................3
DIGITAL SPECIFICATIONS............................................................4
AC SPECIFICATIONS....................................................................... 5
EXPLANATION OF TEST LEVELS................................................ 5
PIN FUNCTION DESCRIPTIONS...................................................... 6
PIN CONFIGURATION........................................................................ 7
PACKAGE OUTLINE.............................................................................9
Ordering Guide ...................................................................................9
TYPICAL PERFORMANCE CHARACTERISTICS........................10
SPI REGISTER MAP ............................................................................14
SPI REGISTER DESCRIPTIONS........................................................15
General Description ..............................................................................19
Serial Peripheral Interface................................................................19
AD9736 Data Interface Controllers ....................................................22
AD9736 LVDS Sample Logic...........................................................23
AD9736 SYNC Logic and Controller.............................................25
AD9736 Digital Built-In Self Test........................................................27
AD9736 Analog Control Register .......................................................28
Voltage Reference...................................................................................29
Applications Information .....................................................................30
AD9736 Evaluation Board Schematics...............................................31
AD9736 Evaluation Board PCB Layout..............................................36
REVISION HISTORY
Revision PrA: Initial Version
Revision PrB: Updated data based on initial evaluation results
Revision PrC: Updated data for web display and ongoing evaluation results
Revision PrD: Added SPI port information
Revision PrE: Cleaned up SPI port tables, added AD9736 rev A evaluation board schematics
Revision PrF: Added BGA Package Outline Drawing
Revision PrG: Added Package Pinout
Revision PrH: Added SPI Port Description
Revision PrI: Edits for readability and clarity, Added Idd typical values and plots, Updated SPI register tables, Added LVDS and SYNC controller
sections, Added pin function table, Added BIST description, Added Analog control section, Added Vref section, Updated eval
board schematic and PCB layout
Revision PrJ: Update BIST information, Update SPI definition to include SCLK edge change for read operation, Add SPI timing, Annotate
schematic to show component values for output circuit, Update ACLR plots, Add PCB fabrication details.
Rev. PrJ | Page 2 of 42
Preliminary Technical Data AD9736/AD9735/AD9734
AD9736/AD9735/AD9734—SPECIFICATIONS1
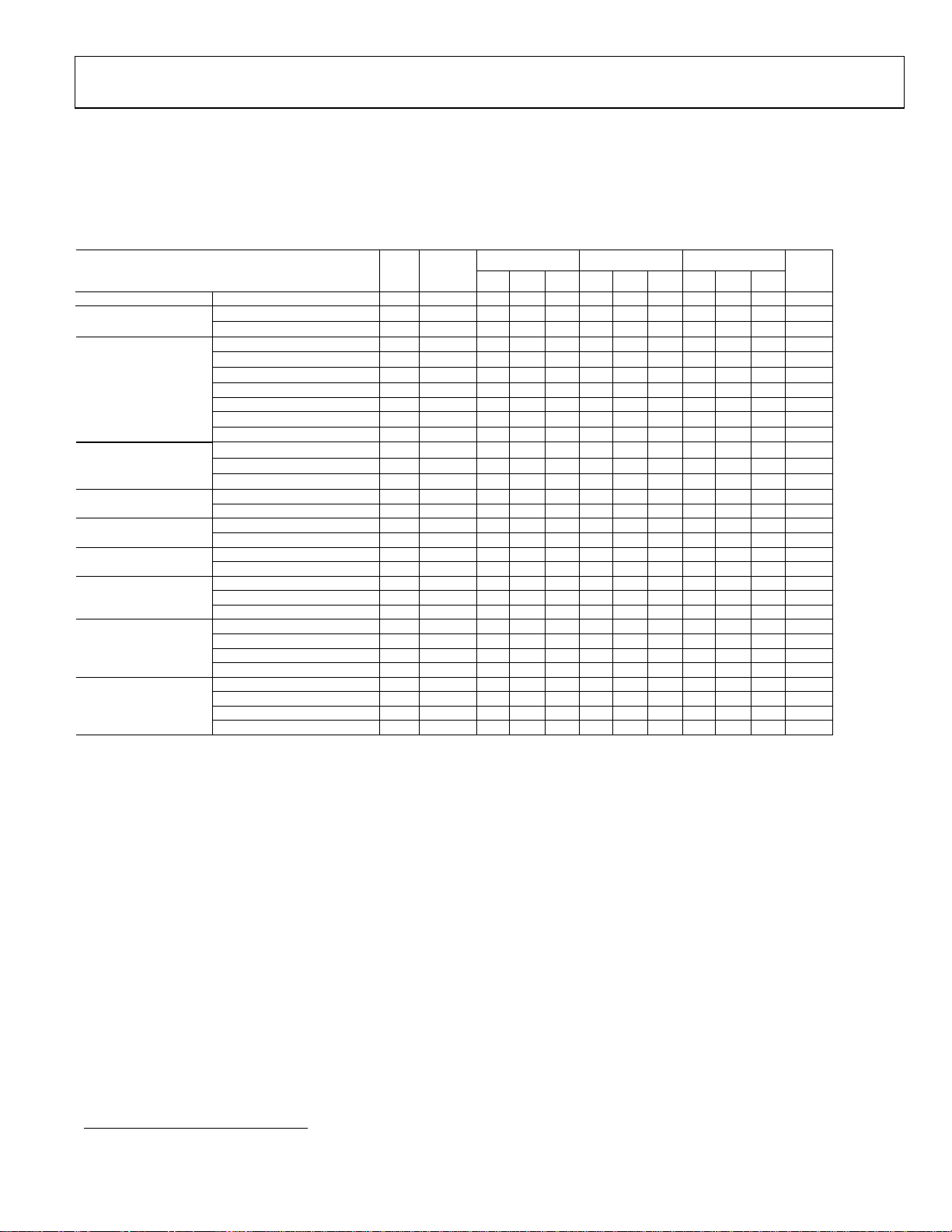
DC SPECIFICATIONS
(VDDA33 = VDDD33 = 3.3 V, VDDA18 = VDDD18 = VDDCLK = 1.8 V, MAXIMUM SAMPLE RATE, FS = 20MA,
1X MODE, 25 OHM 1% BALANCED LOAD, UNLESS OTHERWISE NOTED)
AD9736 AD9735 AD9734
Parameter Temp Test Level
RESOLUTION 14 12 10 Bits
ACCURACY
ANALOG OUTPUTS
TEMPERATURE DRIFT
REFERENCE
ANALOG SUPPLY VOLTAGES
DIGITAL SUPPLY VOLTAGES
POWER CONSUMPTION
SUPPLY CURRENTS
1X Mode
SUPPLY CURRENTS
2x Mode, Interpoation Enabled
Integral Nonlinearity (INL)
Differential Nonlinearity (DNL)
Offset Error TBD TBD TBD % FSR
Gain Error (With Internal Reference)
Gain Error (Without Internal Reference)
Full Scale Output Current 10 20 30 10 20 30 10 20 30 mA
Output Compliance Range 1.0 1.0 1.0 V
Output Resistance TBD TBD TBD
Output Capacitance TBD TBD TBD pF
Offset TBD TBD TBD
Gain TBD TBD TBD
Reference Voltage TBD TBD TBD
Internal Reference Voltage 1.2 1.2 1.2 V
Output Current 100 100 100 nA
VDDA33 3.13 3.3 3.47 3.13 3.3 3.47 3.13 3.3 3.47 V
VDDA18 1.70 1.8 1.90 1.70 1.8 1.90 1.70 1.8 1.90 V
VDDD33 3.13 3.3 3.47 3.13 3.3 3.47 3.13 3.3 3.47 V
VDDD18 1.70 1.8 1.90 1.70 1.8 1.90 1.70 1.8 1.90 V
Bypass Mode 380 380 380 mW
FIR Interpolation Filter Enabled 550 550 550 mW
Standby Power TBD TBD TBD mW
IDDA33 25 TBD TBD mA
IDDA18 47 TBD TBD mA
IDDD33 10 TBD TBD mA
IDDD18 122 TBD TBD mA
IDDA33 25 TBD TBD mA
IDDA18 47 TBD TBD mA
IDDD33 10 TBD TBD mA
IDDD18 234 TBD TBD mA
Min Typ Max Min Typ Max Min Typ Max
TBD TBD LSB
± 2.0
TBD TBD LSB
± 1.0
± 0.5
± 0.5
± 0.5
± 0.5
± 0.5
± 0.5
Table 1: DC Specifications
Unit
% FSR
% FSR
kΩ
ppm/°C
ppm/°C
ppm/°C
1
Specifications subject to change without notice
Rev. PrJ | Page 3 of 42
AD9736/AD9735/AD9734 Preliminary Technical Data
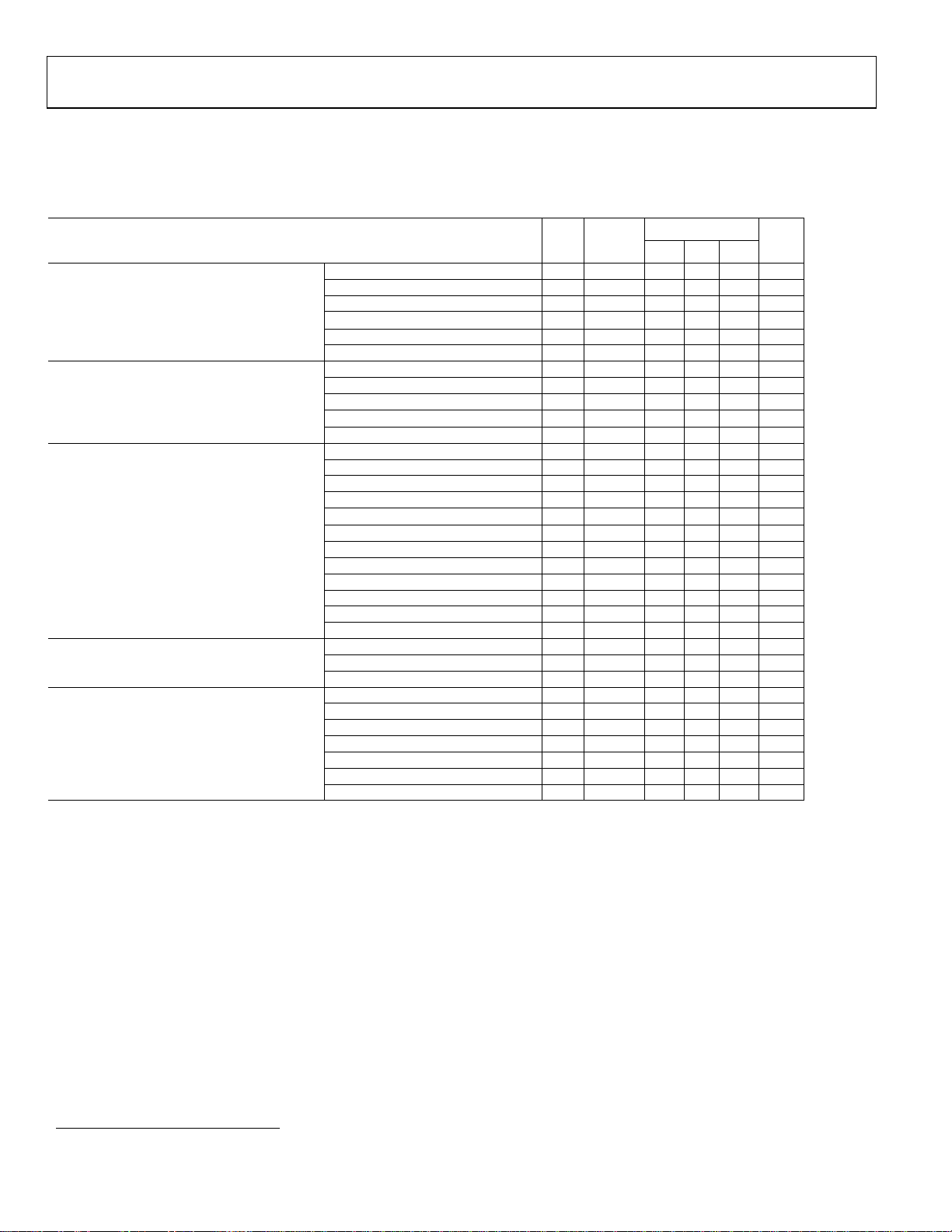
DIGITAL SPECIFICATIONS1
(VDDA33 = VDDD33 = 3.3 V, VDDA18 = VDDD18 = VDDCLK = 1.8 V, MAXIMUM SAMPLE RATE, FS = 20MA,
1X MODE, 25 OHM 1% BALANCED LOAD, UNLESS OTHERWISE NOTED)
LVDS DATA INPUTS (DB[13:0]+, DB[13:0]-)
DB+ = Via, DB- = Vib
LVDS CLOCK INPUT (DATACLK_IN+, DATACLK_IN-)
DATACLK+ = Via, DATACLK- = Vib
LVDS CLOCK OUTPUT (DATACLK_OUT+, DATACLK_ OUT-)
DATACLK_OUT+ = Voa, DATACLK_OUT- = Vob
100 ohm termination
DAC CLOCK INPUT (CLK+, CLK-)
SERIAL PERIPHERAL INTERFACE
AD9736,35,34 Parameter Temp Test Level
Min Typ Max
Input voltage range, Via or Vib 825 1575 mV
Input differential threshold -100 100 mV
Input differential hysteresis 20 mV
Receiver differential input impedance 80 120
LVDS input rate 1200 MSPS
LVDS data Bit Error Rate TBD Err/Bit
Input voltage range, Via or Vib 825 1575 mV
Input differential threshold -100 100 mV
Input differential hysteresis 20 mV
Receiver differential input impedance 80 120
Maximum Clock Rate 600 MHz
Output voltage high, Voa or Vob 1375 mV
Output voltage low, Voa or Vob 1025 mV
Output differential voltage 150 200 250 mV
Output offset voltage 1150 1250 mV
Output impedance, single ended 80 100 120
Ro mismatch between A & B 10 %
Change in |Vod| between ‘0’ and ‘1’ 25 mV
Change in Vos between ‘0’ and ‘1’ 25 mV
Output current – Driver shorted to ground 20 mA
Output current – Drivers shorted together 4 mA
Power-off output leakage TBD mA
Maximum Clock Rate 600 MHz
Differential peak-to-peak Voltage 800 mV
Common Mode Voltage 400 mV
Maximum Clock Rate 1200 MHz
Maximum Clock Rate (SCLK, 1/t
Minimum pulse width high, t
Minimum pulse width low, t
Minimum SDIO and CSB to SCLK setup, tDS 10 ns
Minimum SCLK to SDIO hold, tDH 5 ns
Maximum SCLK to valid SDIO and SDO, tDV 20 ns
Minimum SCLK to invalid SDIO and SDO, t
) 20 MHz
SCLK
20 ns
PWH
20 ns
PWL
5 ns
DNV
Table 2: Digital Specifications
Unit
Ω
Ω
Ω
1
LVDS Drivers and Receivers are compliant to the IEEE-1596 Reduced Range Link, unless otherwise noted
Rev. PrJ | Page 4 of 42
Preliminary Technical Data AD9736/AD9735/AD9734
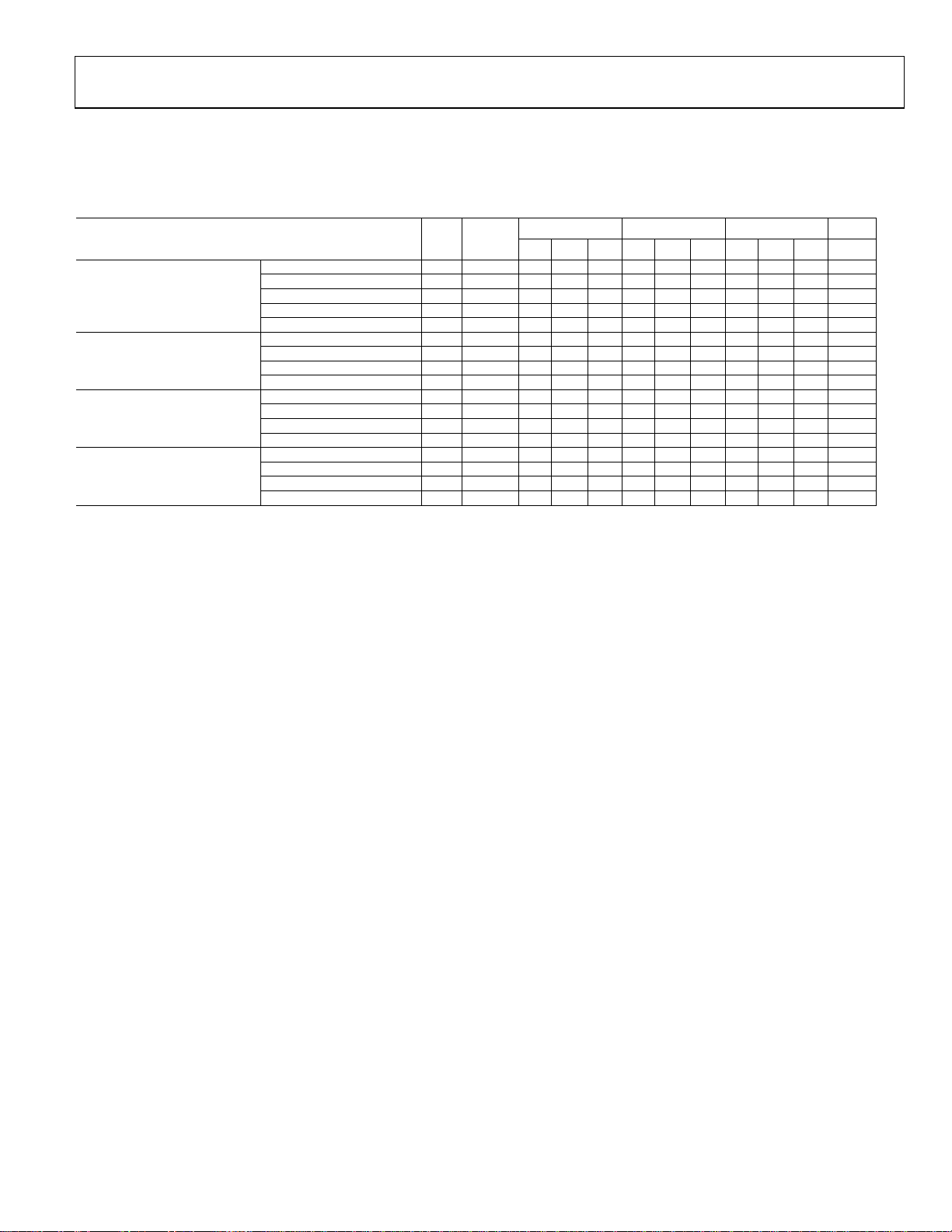
AC SPECIFICATIONS
(VDDA33 = VDDD33 = 3.3 V, VDDA18 = VDDD18 = VDDCLK = 1.8 V, MAXIMUM SAMPLE RATE, FS = 20MA,
1X MODE, 25 OHM 1% BALANCED LOAD, UNLESS OTHERWISE NOTED)
AD9736 AD9735 AD9734
Parameter Temp Test Level
DYNAMIC PERFORMANCE
SPURIOUS FREE DYNAMIC RANGE (SFDR)
Two Tone Intermodulation Distortion (IMD)
Noise Spectral Density (NSD)
Maximum Update Rate 1200 1200 1200 MSPS
Output Settling Time (tst) (to 0.025%) TBD TBD TBD ns
Output Rise Time (10% to 90%) TBD TBD TBD ns
Output Fall Time (90% to 10%) TBD TBD TBD ns
Output Noise (IoutFS=20mA) TBD TBD TBD pA/rtHz
f
= 1200 MSPS, f
DAC
f
= 1200 MSPS, f
DAC
f
= 1200 MSPS, f
DAC
f
= 1200 MSPS, f
DAC
f
= 1200 MSPS, f
DAC
f
= 1200 MSPS, f
DAC
f
= 1200 MSPS, f
DAC
f
= 1200 MSPS, f
DAC
f
= 1200 MSPS, f
DAC
f
= 1200 MSPS, f
DAC
f
= 1200 MSPS, f
DAC
f
= 1200 MSPS, f
DAC
= 50 MHz 80 dBc
OUT
= 100 MHz 77 dBc
OUT
= 316 MHz 63 dBc
OUT
= 550 MHz 55 dBc
OUT
= 50 MHz 85 dBc
OUT
= 100 MHz 84 dBc
OUT
= 316 MHz 74 dBc
OUT
= 550 MHz 65 dBc
OUT
= 50 MHz -165 dBm/Hz
OUT
= 100 MHz -164 dBm/Hz
OUT
= 316 MHz -158 dBm/Hz
OUT
= 550 MHz -155 dBm/Hz
OUT
Table 3: AC Specifications
Min Typ Max Min Typ Max Min Typ Max Unit
EXPLANATION OF TEST LEVELS
TEST LEVEL
I 100% production tested.
II 100% production tested at +25°C and guaranteed by design and characterization at specified temperatures.
III Sample Tested Only
IV Parameter is guaranteed by design and characterization testing.
V Parameter is a typical value only.
VI 100% production tested at +25°C and guaranteed by design and characterization for industrial temperature range.
Rev. PrJ | Page 5 of 42

AD9736/AD9735/AD9734 Preliminary Technical Data
PIN FUNCTION DESCRIPTIONS
Pin No. Name Description
A1, A2, A3, B1, B2, B3, C1, C2, C3, D2, D3 VDDC 1.8V, Clock supply
A4, A5, A6, A9, A10, A11, B4, B5, B6, B9,
B10, B11, C4, C5, C6, C9, C10, C11, D4, D5,
D6, D9, D10, D11
A7, B7, C7, D7 IOUTB DAC negative output, 10mA to 30mA full scale output current
A8, B8, C8, D8 IOUTA DAC positive output, 10mA to 30mA full scale output current
A12, A13, B12, B13, C12, C13, D12, D13 VDDA 3.3V Analog supply
A14, K1 DNC Do Not Connect
B14 I120
C14 VREF
D1, E2, E3, E4, F2, F3, F4, G1, G2, G3, G4 VSSC Clock supply ground
D14 IPTAT
E1, F1 CLK-, CLK+ Negative, Positive DAC clock input (DACCLK)
E11, E12, F11, F12, G11, G12 VSSA Analog supply ground shield
E13 IRQ / UNSIGNED
E14 RESET / PD
F13 CSB / 2x See SPI and PIN Mode sections for pin description
F14 SDIO / FIFO See SPI and PIN Mode sections for pin description
G13 SCLK / FSC0 See SPI and PIN Mode sections for pin description
G14 SDO / FSC1 See SPI and PIN Mode sections for pin description
H1, H2, H3, H4, H11, H12, H13, H14, J1, J2,
J3, J4, J11, J12, J13, J14
K2, K3, K4, K11, K12, L2, L3, L4, L5, L6, L9,
L10, L11, L12, M3, M4, M5, M6, M9, M10,
M11, M12
K13, K14 DB<13> -, + Negative, Positive data input bit 13 (MSB), reduced swing LVDS
L1 PIN_MODE
L7, L8, M7, M8, N7, N8, P7, P8 VDD33 3.3V Digital supply
L13, L14 DB<12> -, + Negative, Positive data input bit 12, reduced swing LVDS
M2, M1 DB<0> -, + Negative, Positive data input bit 0 (LSB), reduced swing LVDS
M13, M14 DB<11> -, + Negative, Positive data input bit 11, reduced swing LVDS
N1, P1 DB<1> -, + Negative, Positive data input bit 1, reduced swing LVDS
N2, P2 DB<2> -, + Negative, Positive data input bit 2, reduced swing LVDS
N3, P3 DB<3> -, + Negative, Positive data input bit 3, reduced swing LVDS
N4, P4 DB<4> -, + Negative, Positive data input bit 4, reduced swing LVDS
N5, P5 DB<5> -, + Negative, Positive data input bit 5, reduced swing LVDS
N6, P6 DATACLK_OUT -, + Negative, Positive output clock, reduced swing LVDS
N9, P9 DATACLK_IN -, + Negative, Positive data input clock, reduced swing LVDS
N10, P10 DB<6> -, + Negative, Positive data input bit 6, reduced swing LVDS
N11, P11 DB<7> -, + Negative, Positive data input bit 7, reduced swing LVDS
N12, P12 DB<8> -, + Negative, Positive data input bit 8, reduced swing LVDS
N13, P13 DB<9> -, + Negative, Positive data input bit 9, reduced swing LVDS
N14, P14 DB<10> -, + Negative, Positive data input bit 10, reduced swing LVDS
VSSA Analog supply ground
Nominal 1.2V reference tied to analog ground via 10kohm resistor to generate a
120uA reference current
Bandgap voltage reference I/O, tie to analog ground via 1nF capacitor, output
impedance approximately 5kohms
Factory test, output current proportional to absolute temperature, approximately
10uA at 25C with approximately 20nA/C slope
If PIN_MODE = 0, IRQ: Active low open-drain interrupt request output, pull up to
VDD3.3 with 10kohm resistor
If PIN_MODE = 1, UNSIGNED: Digital input pin where 0 = two’s complement input
data format, 1 = unsigned
If PIN_MODE = 0, RESET: 1 resets the AD9736
If PIN_MODE = 1, PD: 1 puts the AD9736 in the power down state
VDD 1.8V Digital supply
VSS Digital supply ground
0, SPI Mode, SPI enabled
1, PIN Mode, SPI disabled, direct pin control
Rev. PrJ | Page 6 of 42
Preliminary Technical Data AD9736/AD9735/AD9734
S
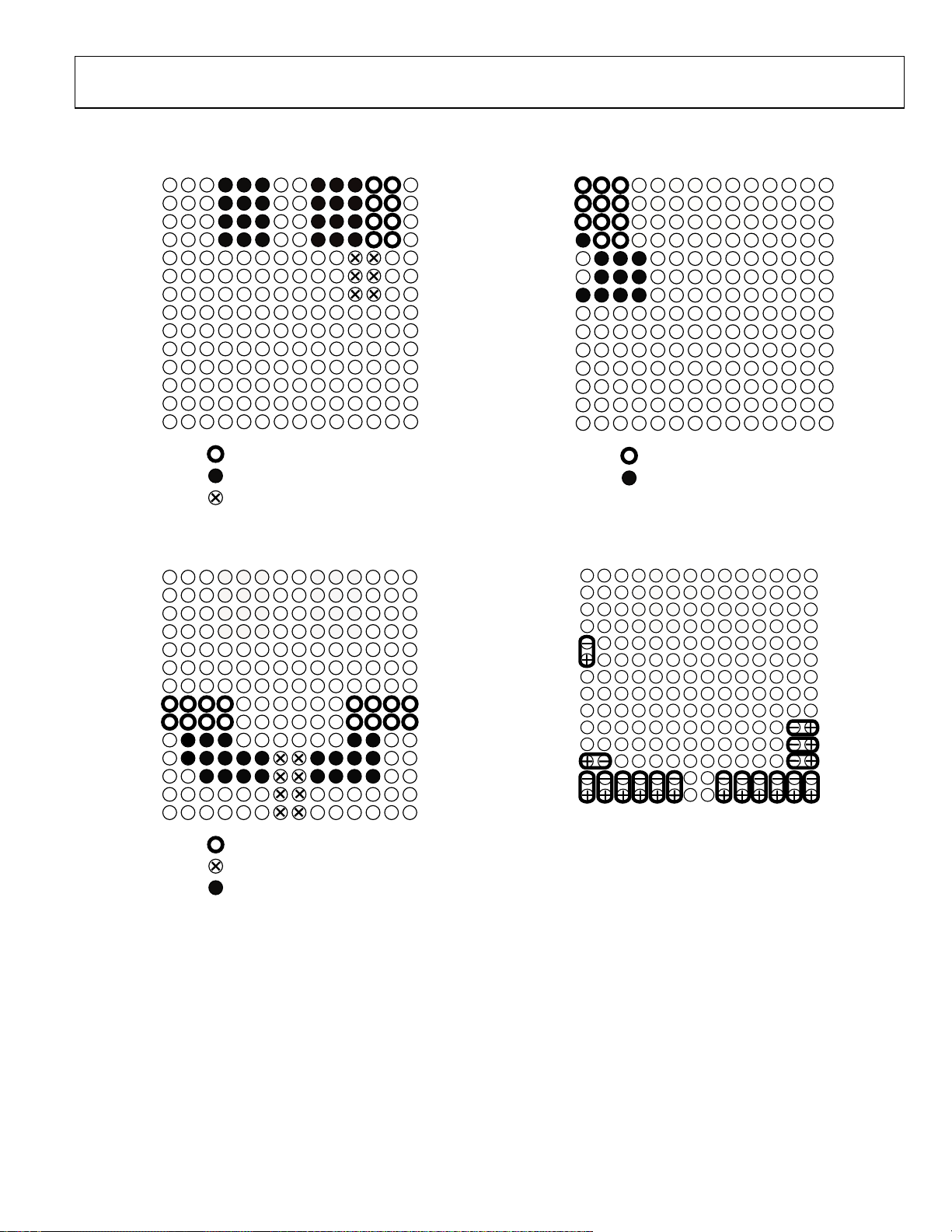
PIN CONFIGURATION
1234567891011121314
A
B
C
D
E
F
G
H
J
K
L
M
N
P
1 2 3 4 5 6 7 8 9 10 11 12 13 14
A
B
C
D
E
F
G
H
J
K
L
M
N
P
VDDA, 3.3V, Analog Supply
VSSA, Analog Supply Ground
VSSA, Analog Supply Ground Shield
Figure 2. AD9736 Analog Supply Pins ( TOP view)
1234567891011121314
A
B
C
D
E
F
G
H
J
K
L
M
N
P
VDD, 1.8V Digital Supply
VDD33, 3.3V Digital Supply
VSS Digital Supply Ground
Figure 4. AD9736 Digital Supply Pins ( TOP view)
VDDC, 1.8V, Clock Supply
VSSC, Clock Supply Ground
CLKN
LVDS0 (LSB)
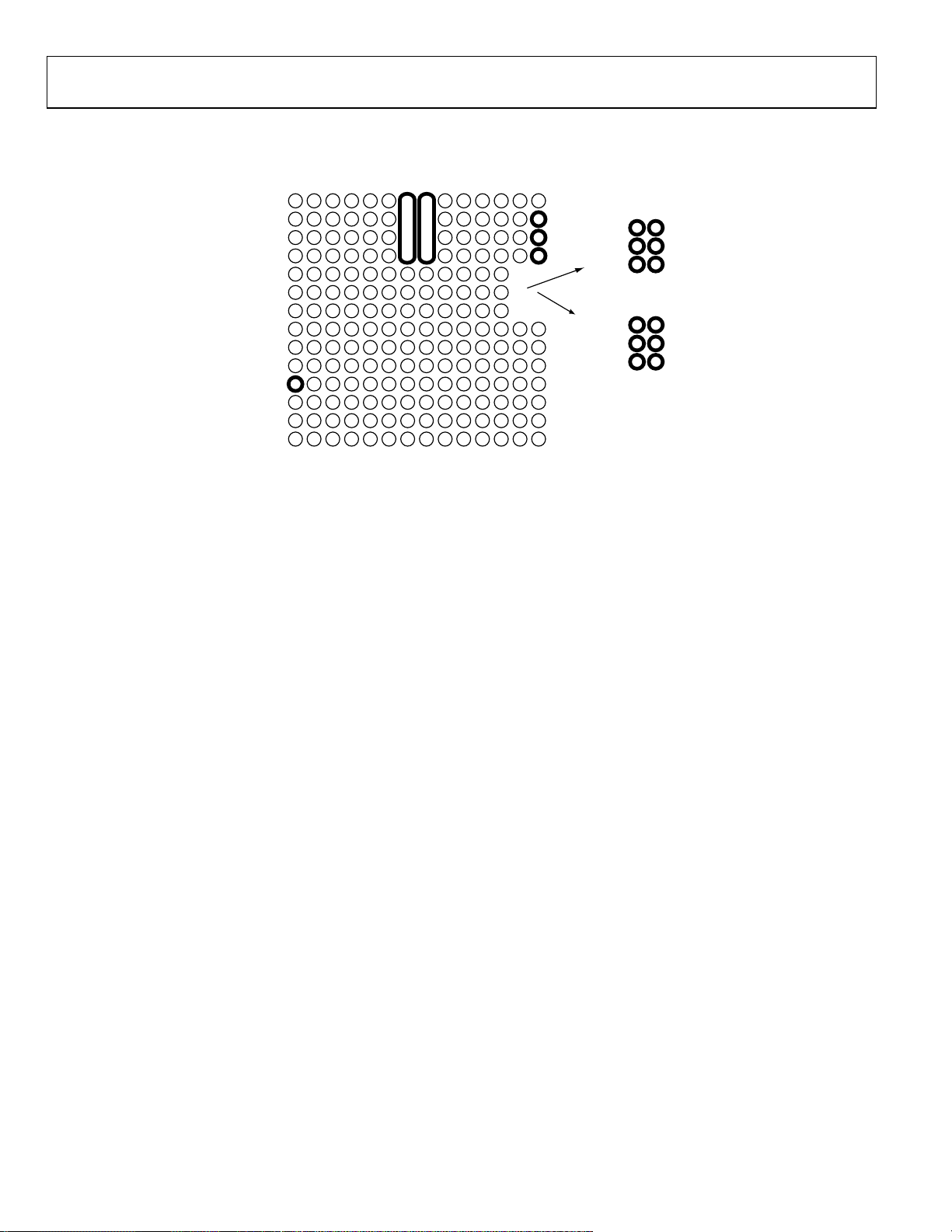
Figure 3. AD9736 Clock Supply Pins ( TOP view)
1 2 3 4 5 6 7 8 9 10 11 12 13 14
A
B
C
D
E
F
CLKP
G
H
J
K
L
M
N
P
LVDS
LVDS1
LVDS3
LVDS4
LVDS5
LVDSCLKP,N OUT
DCLKP,N IN
LVDS6
LVDS7
LVDS8
LVDS9
LVDS10
LVDS13 (M
LVDS12
LVDS11
Figure 5. AD9736 Digital LVDS Inputs, Clock I/O (TOP view)
Rev. PrJ | Page 7 of 42
AD9736/AD9735/AD9734 Preliminary Technical Data
IOUTN
IOUTP
PIN_MODE=0,
I120
VREF
IPTAT
UNSIGNED
SPI ENABLED
IRQ
CSB
SCLK
PIN_MODE=1,
SPI DISABLED
2x
FSCO
RESET
SDIO
SDO
PD
FIFO
FSC1
PIN_MODE
1 2 3 4 5 6 7 8 9 1011121314
A
B
C
D
E
F
G
H
J
K
L
M
N
P
Figure 6. AD9736 Analog I/O and SPI Control Pins ( TOP view)
Rev. PrJ | Page 8 of 42
Preliminary Technical Data AD9736/AD9735/AD9734
a
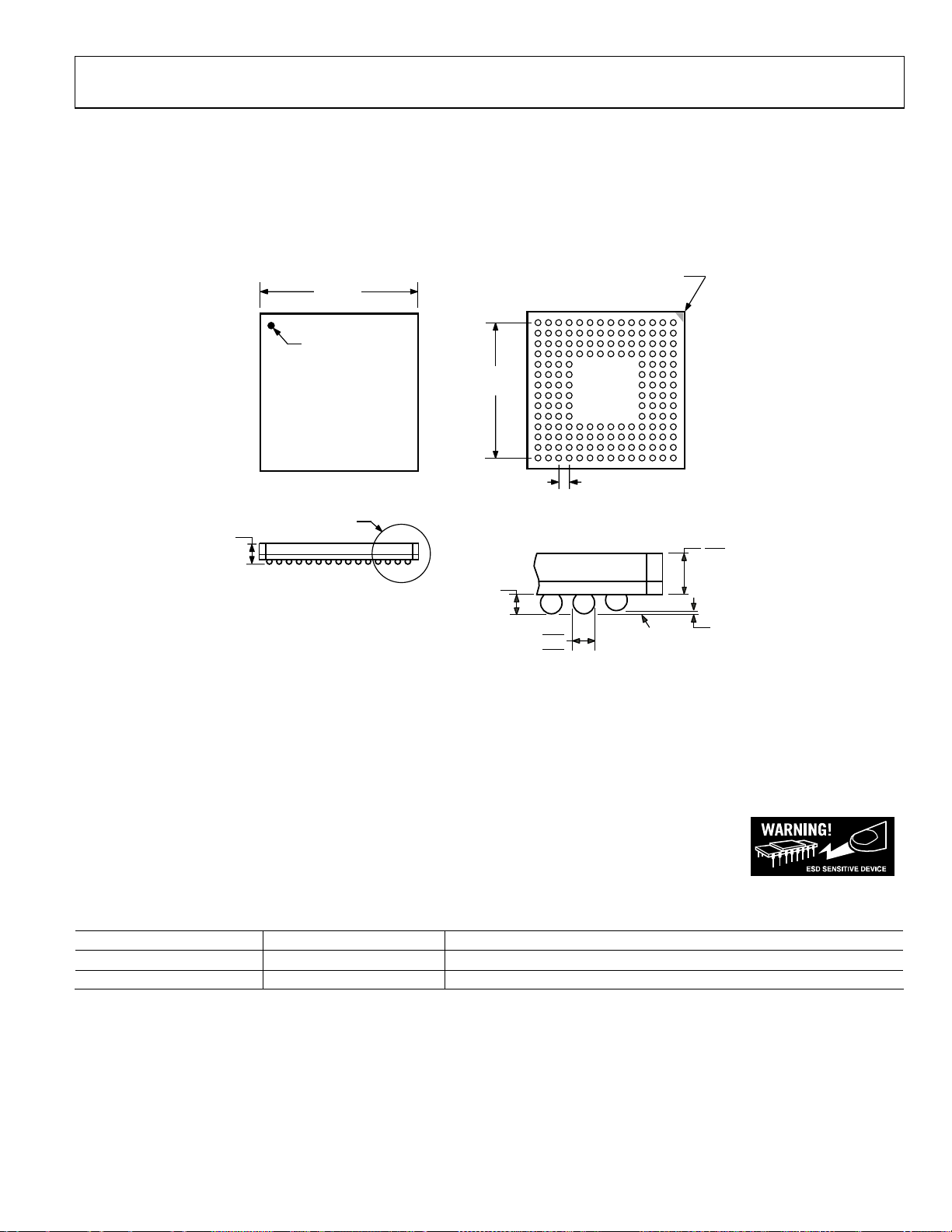
PACKAGE OUTLINE
160-Lead Chip Scale Ball Grid Array [CSPBGA]
(BC-160)
Dimensions shown in millimeters
A1 CORNER
INDEX AREA
95
BOTTOM
VIEW
0.80 BSC
DETAIL A
4
321
A
B
C
D
E
F
G
H
J
K
L
M
N
P
1.00
0.85
1.40 MAX
12.00
BSC SQ
BALL A1
INDICATOR
TOP VIEW
DETAIL A
10.40
BSC
1413121110 876
0.25 MIN
0.55
0.50
0.45
BALL DIAMETER
COMPLIANT WITH JEDEC STANDARDS MO-205-AE.
SEATING
PLANE
0.12 MAX
COPLANARITY
Figure 7. AD9736 BGA Package Outline Drawing
ESD CAUTION
ESD (electrostatic discharge) sensitive device. Electrostatic charges as high as 4000 V readily accumulate on the
human body and test equipment and can discharge without detection. Although this product features proprietary
ESD protection circuitry, permanent damage may occur on devices subjected to high energy electrostatic discharges.
Therefore, proper ESD precautions are recommended to avoid performance degradation or loss of functionality.
Ordering Guide
Model Temperature Range Description
AD9736BBC
-40°C to +85°C (Ambient)
AD9736-EB 25°C (Ambient) Evaluation Board
160-Lead Chip Scale BGA
Table 4: Ordering Guide
Rev. PrJ | Page 9 of 42
AD9736/AD9735/AD9734 Preliminary Technical Data
TYPICAL PERFORMANCE CHARACTERISTICS
1
0.8
0.6
0.4
0.2
0
Error - LSB
-0.2
-0.4
-0.6
-0.8
-1
0 2048 4096 6144 8192 10240 12288 14336 16384
Code
Figure 8. AD9736, Typical INL
0.5
0.3
0.1
-0.1
Error - LSB
-0.3
-0.5
-0.7
0 2048 4096 6144 8192 10240 12288 14336 16384
Code
Figure 9. AD9736, Typical DNL
3rd Order IM D With Respect t o Fout ( 20 mA FS)
800MSPS 1GSPS 1.2GSPS
90
85
80
75
70
IMD - [dBc]
65
60
55
50
0 50 100 150 200 250 300 350 400 450 500 550 600
Fout - [ MHz ]
Figure 10. AD9736, 3rd Order IMD vs. Fout and Sample Rate
Rev. PrJ | Page 10 of 42
Preliminary Technical Data AD9736/AD9735/AD9734
NSD Comparison With 1-Tone and 8-Tones at 1.2GSPS
1 Tone 8 Tones
-150
-152
-154
-156
-158
-160
-162
NSD - dBm / Hz
-164
-166
-168
-170
0 100 200 300 400 500 600 700
Figure 11. AD9736, Noise Spectral Density (NSD) vs. Fout at 1.2GSPS
In- Band SFDR With Respect to Fout (2 0mA FS)
Fout - Mhz
90
85
80
75
70
65
SFDR - [dBc]
60
55
50
0 50 100 150 200 250 300 350 400 450 500 550 600
800MSPS 1GSPS 1.2GSPS
Fout - [MHz]
Figure 12. AD9736, In Band SFDR vs. Fout and Sample Rate
Rev. PrJ | Page 11 of 42
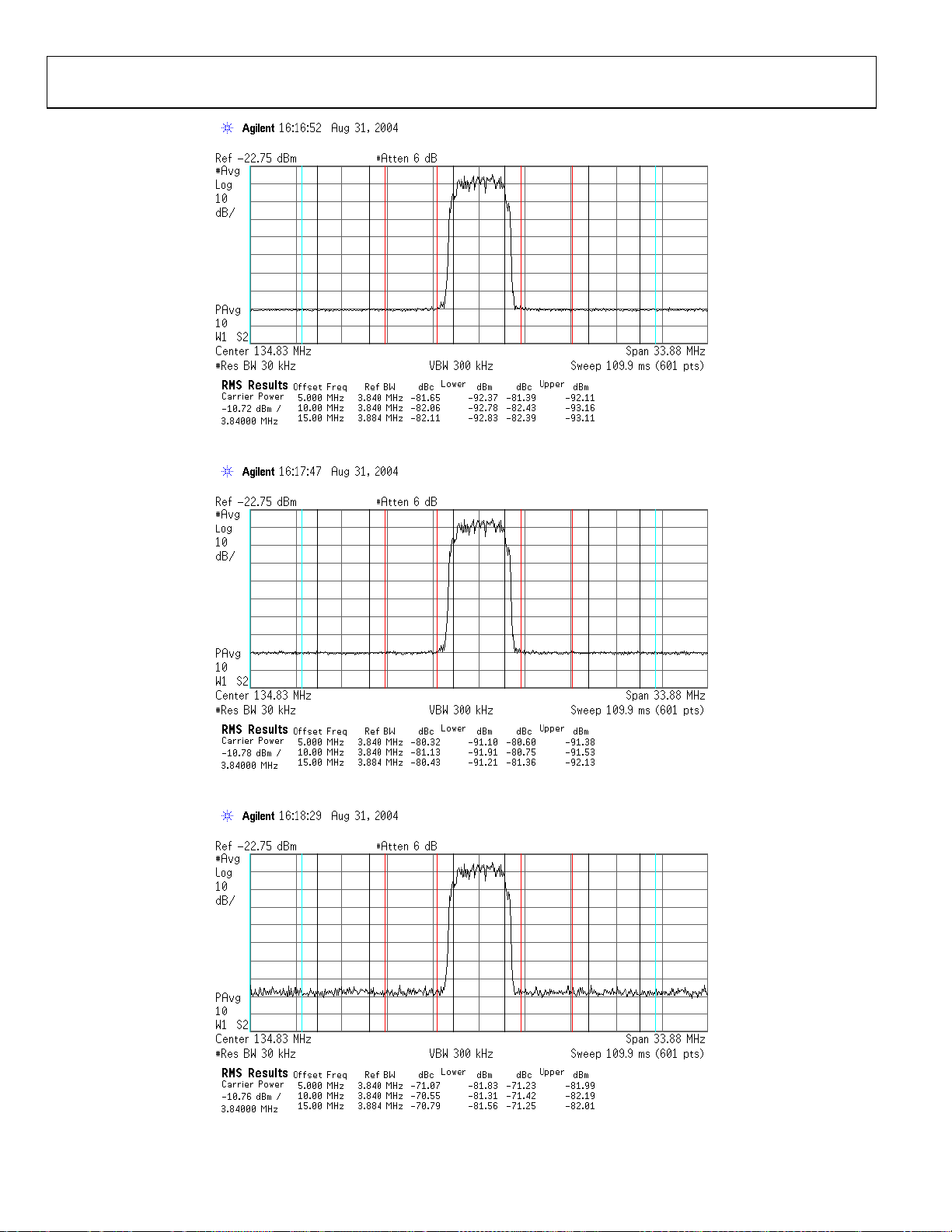
AD9736/AD9735/AD9734 Preliminary Technical Data
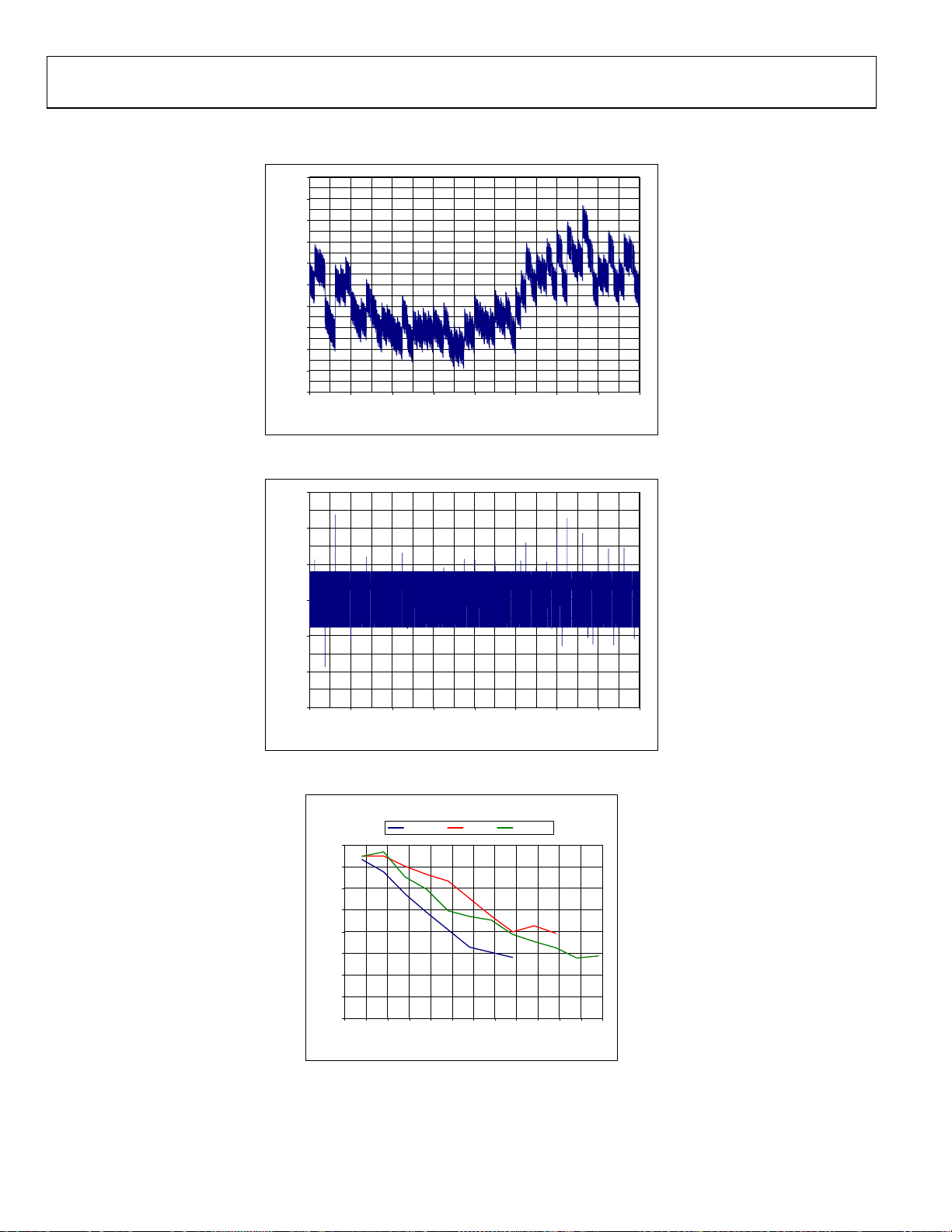
Figure 13. AD9736, WCDMA carrier at 134.83MHz, fdata=491.52MSPS
Figure 14. AD9735, WCDMA carrier at 134.83MHz, fdata=491.52MSPS
Figure 15. AD9734, WCDMA carrier at 134.83MHz, fdata=491.52MSPS
Rev. PrJ | Page 12 of 42
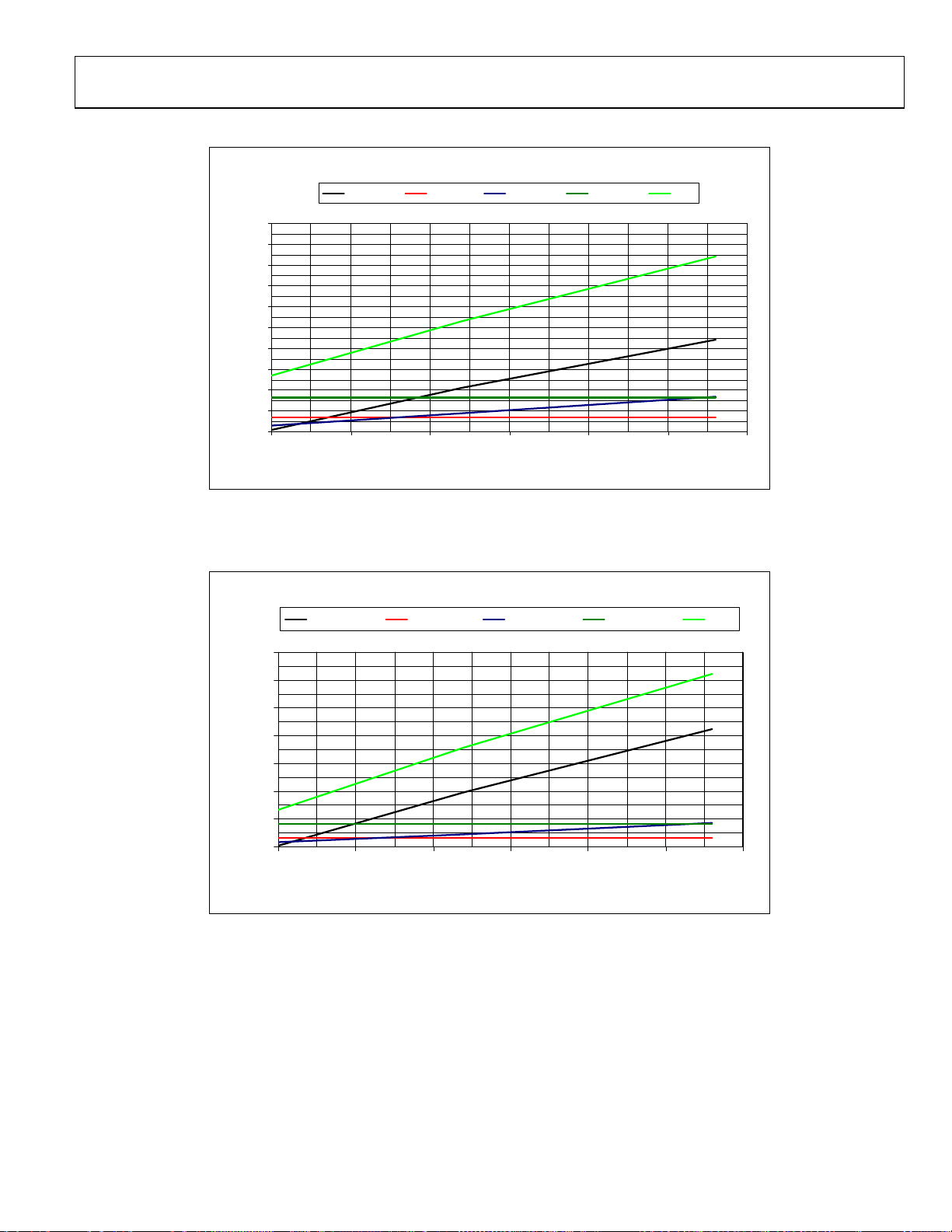
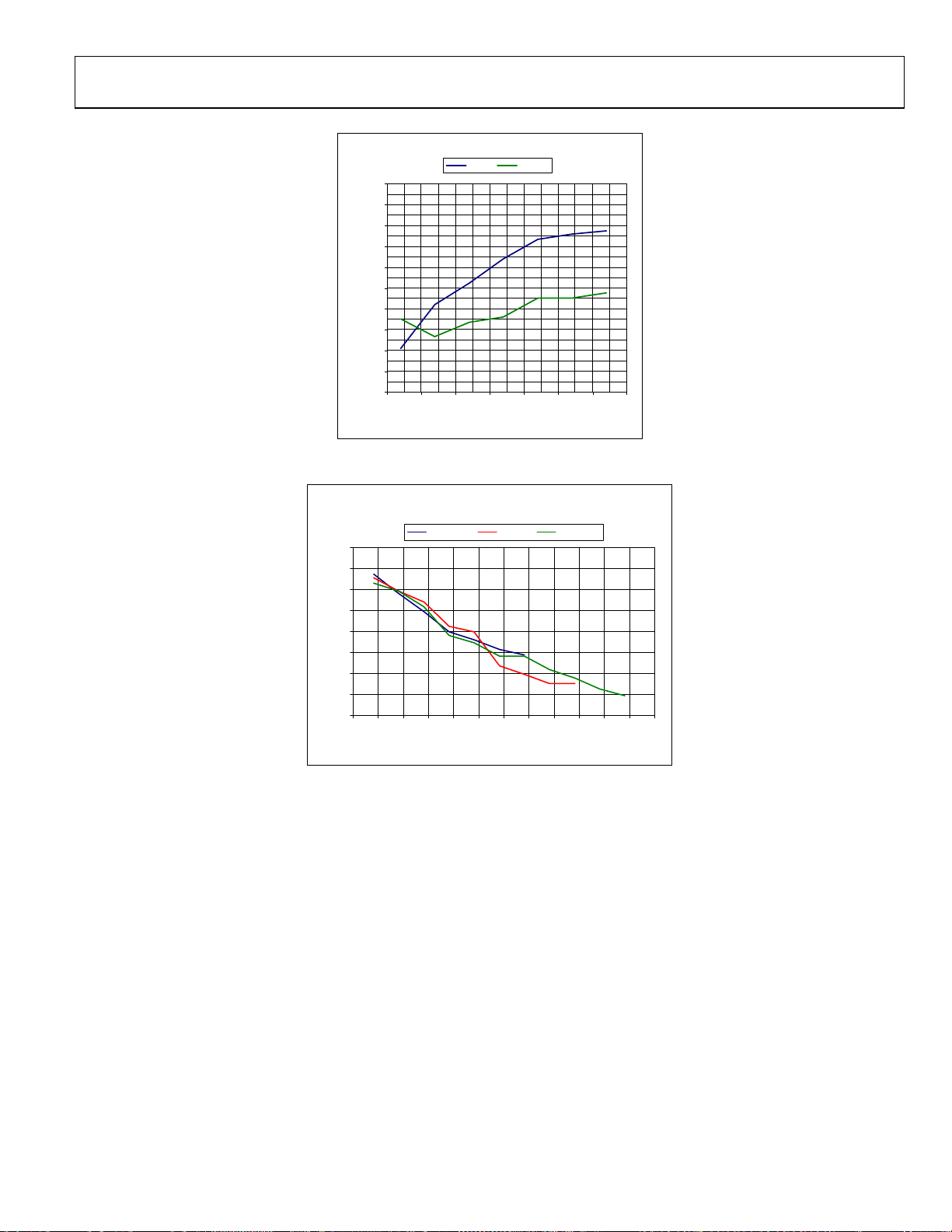
Preliminary Technical Data AD9736/AD9735/AD9734
AD9736 Power Co nsu mpti o n 1x Mode Wi t h R espect to Clock Sp ee d
VDDD_1.8 VDDD_33 VDDA_1.8 VDDA_3.3 total
0.5
0.45
0.4
0.35
0.3
0.25
0.2
Power - W
0.15
0.1
0.05
0
0 250 500 750 1000 1250 1500
FCLK- MHz
Figure 16. AD9736 Power vs. Clock Frequency
AD9736 Power Co nsu mpti o n 2x Mode Wi t h R espect to Clock Sp ee d
VDDD_1.8 VDDD_33 VDDA_1.8 VDDA_3.3 total
0.7
0.6
0.5
0.4
0.3
Power - W
0.2
0.1
0
0 250 500 750 1000 1250 1500
FCLK- MHz
Figure 17. AD9736 Power vs. Clock Frequency in 2x Mode
Rev. PrJ | Page 13 of 42

AD9736/AD9735/AD9734 Preliminary Technical Data
SPI REGISTER MAP
ADR
ADR
DEC
HEX
0 00
1 01
2 02
3 03
4 04
5 05
6 06
7 07
8 08
9 09
10 0A
11 0B
Register
Name
MODE
IRQ
FSC_1
FSC_2
LVD S_ CN T1
LVD S_ CN T2
LVD S_ CN T3
SYNC_CNT1
SYNC_CNT2
RESERVED
RESERVED
RESERVED
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Default
SDIO_DIR LSBFIRST RESET LONG_INS 2X MODE FIFO MODE DATAFRMT PD 00 00
LVDS SYNC CROSS RESV’D IE_LVDS IE_SYNC IE_CROSS RESV’D 00 00
SLEEP FSC<9> FSC<8> 02 02
FSC<7> FSC<6> FSC<5> FSC<4> FSC<3> FSC<2> FSC<1> FSC<0> 00 00
MSD<3> MSD<2> MSD<1> MSD<0> MHD<3> MHD<2> MHD<1> MHD<0> 00 00
SD<3> SD<2> SD<1> SD<0> LCHANGE ERR_HI ERR_LO CHECK 00 00
LSURV LAUTO LFLT<3> LFLT<2> LFLT<1> LFLT<0> LTRH<1> LTRH<0> 00 00
FIFOSTAT3 FIFOSTAT2 FIFOSTAT1 FIFOSTAT0 VALID SCHANGE PHOF<1> PHOF<0> 00 00
SSURV SAUTO SFLT<3> SFLT<2> SFLT<1> SFLT<0> RESV’D STRH<0> 00 00
(HEX)
MODE
(HEX)
PIN
12 0C
13 0D
14 0E
15 0F
16 10
17 11
18 12
19 13
20 14
21 15
22 16
31 1F
RESERVED
RESERVED
ANA_CNT1
ANA_CNT2
RESERVED
BIST_CNT
BIST<7:0>
BIST<15:8>
BIST<23:16>
BIST<31:24>
CCLK _DIV
VERSION
MSEL<1> MSEL<0> TRMBG<2> TRMBG<1> TRMBG<0> C0 C0
HDRM<7> HDRM<6> HDRM<5> HDRM<4> HDRM<3> HDRM<2> HDRM<1> HDRM<0> CA CA
SEL<1> SEL<0> SIG_READ LVDS_EN SYNC_EN CLEAR 00 00
RESV’D RESV’D RESV’D RESV’D CCD<3> CCD<2> CCD<1> CCD<0> 00 00
VER<5> VER<4> VER<3> VER<2> VER<1> VER<0> RES10 RES12
Note: Write ‘0’ to unspecified or reserved bit locations. Reading these bits will return unknown values.
Tab le 5. SPI Re gi ste r M ap
Rev. PrJ | Page 14 of 42

Preliminary Technical Data AD9736/AD9735/AD9734
SPI REGISTER DESCRIPTIONS
REG 00 -> MODE
Reading REG 00 returns previously written values for all defined register bits unless otherwise noted. Reset value in bold text.
ADR Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0x00 MODE SDIO_DIR LSB/MSB RESET LONG_INS 2X MODE FIFO MODE DATAFRMT PD
SDIO_DIR : WRITE ->
LSBFIRST : WRITE ->
RESET : WRITE->
LONG_INS : WRITE ->
2X_MODE : WRITE ->
FIFO_MODE : WRITE ->
DATAFRMT : WRITE ->
PD : WRITE ->
REG 01 -> Interrupt Request (IRQ)
Reading REG 01 returns previously written values for all defined register bits unless otherwise noted. Reset value in bold text.
ADR Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0, Input only per SPI standard
1, Bidirectional per SPI standard
0, MSB first per SPI standard
1, LSB first per SPI standard
NOTE: Only change LSB/MSB order in single byte instructions to avoid erratic behavior due to bit order errors
0, Execute software reset of SPI and controllers, reload default register values EXCEPT registers 0x00 and 0x04
1, Set software reset prior to writing ‘0’ to execute the software reset
0, Short (single-byte) instruction word
1, Long (two-byte) instruction word, not necessary since the maximum internal address is REG31 (0x1F)
0, Disable 2x Interpolation Filter
1, Enable 2x Interpolation Filter
0, Disable FIFO synchronization
1, Enable FIFO synchronization
0, Signed input DATA with midscale = 0x0000
1, Unsigned input DATA with midscale = 0x2000
0, Enable LVDS Receiver, DAC and Clock Circuitry
1, Power down LVDS Receiver, DAC and Clock Circuitry
0x01 IRQ LVDS SYNC CROSS RESV’D IE_LVDS IE_SYNC IE_CROSS RESV’D
LVDS : WRITE -> Don’t Care
: READ ->
SYNC : WRITE -> Don’t Care
: READ ->
CROSS : WRITE -> Don’t Care
: READ ->
IE_LVDS : WRITE ->
IE_SYNC : WRITE ->
IE_CROSS : WRITE ->
0, No active LVDS receiver interrupt
1, Interrupt in LVDS receiver occurred
0, No active SYNC logic interrupt
1, Interrupt in SYNC logic occurred
0, No active CROSS logic interrupt
1, Interrupt in CROSS logic occurred
0, Reset LVDS receiver interrupt and disable future LVDS receiver interrupts
1, Enable LVDS receiver interrupt to activate IRQ pin
0, Reset SYNC logic interrupt and disable future SYNC logic interrupts
1, Enable SYNC logic interrupt to activate IRQ pin
0, Reset CROSS logic interrupt and disable future CROSS logic interrupts
1, Enable CROSS logic interrupt to activate IRQ pin
Rev. PrJ | Page 15 of 42

AD9736/AD9735/AD9734 Preliminary Technical Data
REG 02, 03 -> Full Scale Current (FSC)
Reading REG 02 & 03 return previously written values for all defined register bits unless otherwise noted. Reset value in bold text.
ADR Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0x02 FSC_1 SLEEP FSC<9> FSC<8>
0x03 FSC_2 FSC<7> FSC<6> FSC<5> FSC<4> FSC<3> FSC<2> FSC<1> FSC<0>
SLEEP : WRITE ->
FSC<9:0> : WRITE ->
REG 04, 05, 06 -> LVDS Controller (LVDS_CNT)
Reading REG 04, 05 & 06 return previously written values for all defined register bits unless otherwise noted. Reset value in bold text.
ADR Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0x04 LVDS_CNT1 MSD<3> MSD<2> MSD<1> MSD<0> MHD<3> MHD<2> MHD<1> MHD<0>
0x05 LVDS_CNT2 SD<3> SD<2> SD<1> SD<0> LCHANGE ERR_HI ERR_LO CHECK
0x06 LVDS_CNT3 LSURV LAUTO LFLT<3> LFLT<2> LFLT<1> LFLT<0> LTRH<1> LTRH<0>
MSD<3:0> : WRITE ->
: READ ->
MHD<3:0> : WRITE ->
: READ ->
0, Enable DAC output
1, Set DAC output current to 0mA
0x000, 10mA full scale output current
0x200, 20mA full scale output current NOTE: Iout = (72 + 192 * ( FSC<9:0> / 1024 ) ) * I120
0x3FF, 30mA full scale output current where I120 = Vref / R120u, for example 1.2V / 10k = 120uA
0x0, Set setup delay for the measurement system
If ( LAUTO == 1) the latest measured value for the setup delay
If ( LAUTO == 0) read back of the last SPI write to this bit
0x0, Set hold delay for the measurement system
If ( LAUTO == 1) the latest measured value for the hold delay
If ( LAUTO == 0) read back of the last SPI write to this bit
SD<3:0> : WRITE->
: READ ->
LCHA NGE : RE AD ->
ERR_HI : READ -> One of the 15 LVDS inputs is above the input voltage limits of the IEEE reduce link spec.
ERR_LO : READ -> One of the 15 LVDS inputs is below the input voltage limits of the IEEE reduced link spec.
CHECK : READ ->
LSURV : WRITE ->
LAUTO : WRITE ->
LFLT<3:0> : WRITE ->
0x0, Set sample delay
If ( LAUTO == 1) the result of a measurement cycle is stored in this register
If ( LAUTO == 0) read back of the last SPI write to this bit
0, No change from previous measurement
1, Change in value from the previous measurement
NOTE: The average filter and the threshold detection are not applied to this bit
0, Phase measurement – sampling in the previous or following DATA cycle
1, Phase measurement – sampling in the correct DATA cycle
0, The controller stops after completion of the current measurement cycle
1, Continuous measurements are taken and an interrupt is issued if the clock alignment drifts beyond the threshold value
0, Sample delay is not automatically updated
1, Continuously starts measurement cycles and updates the sample delay according to the measurement
NOTE: LSURV (REG06 Bit 7) must be set to 1 and the LVDS IRQ (REG01 Bit 3) must be set to 0 for AUTO mode
0x0, Average filter length, Delay = Delay + Delta Delay / 2^ LFLT<3:0>, values greater than 12 (0x0C) are clipped to 12
Rev. PrJ | Page 16 of 42

Preliminary Technical Data AD9736/AD9735/AD9734
LTRH<2:0> : : WRITE ->
REG 07, 08 -> SYNC Controller (SYNC_CNT)
Reading REG 07 & 08 return previously written values for all defined register bits unless otherwise noted. Reset value in bold text.
ADR Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0x07 SYNC_CNT1 FIFOSTAT3 FIFOSTAT2 FIFOSTAT1 FIFOSTAT0 VALID SCHANGE PHOF<1> PHOF<0>
0x08 SYNC_CNT2 SSURV SAUTO SFLT<3> SFLT<2> SFLT<1> SFLT<0> RESV’D STRH<0>
FIFOSTAT<2:0> : READ -> Position of FIFO read counter, range from 0 to 7
000, Set auto update threshold values
FIFOSTAT<3> : READ ->
VALID : READ ->
SCHANGE : READ ->
PHOF<1:0> : WRITE ->
: READ ->
SSURV : WRITE ->
SAUTO : WRITE ->
SFLT<3:0> : WRITE ->
STRH<0> : WRITE ->
REG 14, 15 -> Analog Control (ANA_CNT)
Reading REG 14 & 15 return previously written values for all defined register bits unless otherwise noted. Reset value in bold text.
0, SYNC logic OK
1, Error in SYNC logic
0, FIFOSTAT<3:0> is not valid yet
1, FIFOSTAT<3:0> is valid after a reset
0, No change in FIFOSTAT<3:0>
1, FIFOSTAT<3:0> has changed since the previous measurement cycle when SSURV = 1 (surveillance mode active)
00, Change the readout counter
Current setting of the readout counter (PHOF<1:0>) in surveillance mode (SSURV = 1) after an interrupt
Current calculated optimal readout counter value in AUTO mode (SAUTO = 1)
0, The controller stops after completion of the current measurement cycle
1, Continuous measurements are taken and an interrupt is issued if the readout counter drifts beyond the threshold value
0, Readout counter (PHOF<3:0>) is not automatically updated
1, Continuously starts measurement cycles and updates the readout counter according to the measurement
NOTE: SSURV (REG08 Bit 7) must be set to 1 and the SYNC IRQ (REG01 Bit 2) must be set to 0 for AUTO mode
0x0, Average filter length, FIFOSTAT = FIFOSTAT + Delta FIFOSTAT / 2 ^ SFLT<3:0>, values greater than 12 (0x0C) are clipped to 12
0, If FIFOSTAT<2:0> = 0 | 7, generate a SYNC interrupt
1, If FIFOSTAT<2:0> = 0 | 1 | 6 | 7, generate a SYNC interrupt
ADR Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0x0E ANA_CNT1 MSEL<1> MSEL<0> TRMBG<2> TRMBG<1> TRMBG<0>
0x0F ANA_CNT2 HDRM<7> HDRM<6> HDRM<5> HDRM<4> HDRM<3> HDRM<2> HDRM<1> HDRM<0>
00, Mirror roll off frequency control = bypass
MSEL<1:0> : WRITE ->
TRMBG<2:0> : WRITE ->
HDRM<7:0> : WRITE ->
01, Mirror roll off frequency control = narrowest bandwidth
10, Mirror roll off frequency control = medium bandwidth
11, Mirror roll off frequency control = widest bandwidth
NOTE: See plot in the applications section
000, Bandgap temperature characteristic trim
NOTE: See plot in the applications section
0xCA, Output stack headroom control
HDRM<7:4> set reference offset from Vdd3v (vcas centering)
HDRM<3:0> set overdrive (current density) trim (temperature tracking)
Note: Set to 0xCA for optimum performance
Rev. PrJ | Page 17 of 42

AD9736/AD9735/AD9734 Preliminary Technical Data
REG 17, 18, 19, 20, 21 -> Built-in Self Test Control (BIST_CNT)
Reading REG17, 18, 19, 20 & 21 return previously written values for all defined register bits unless otherwise noted. Reset value in bold text.
ADR Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0x11 BIST_CNT SEL<1> SEL<0> SIG_READ LVDS_EN SYNC_EN CLEAR
0x12 BIST<7:0> BIST<7> BIST<6> BIST<5> BIST<4> BIST<3> BIST<2> BIST<1> BIST<0>
0x13 BIST<15:8> BIST<15> BIST<14> BIST<13> BIST<12> BIST<11> BIST<10> BIST<9> BIST<8>
0x14 BIST<23:16> BIST<23> BIST<22> BIST<21> BIST<20> BIST<19> BIST<18> BIST<17> BIST<16>
0x15 BIST<31:24> BIST<31> BIST<30> BIST<29> BIST<28> BIST<27> BIST<26> BIST<25> BIST<24>
00, Write result of the LVDS Phase 1 BIST to BIST<31:0>
SEL<1:0> : WRITE ->
01, Write result of the LVDS Phase 2 BIST to BIST<31:0>
10, Write result of the SYNC Phase 1 BIST to BIST<31:0>
11, Write result of the SYNC Phase 2 BIST to BIST<31:0>
SIG_READ : WRITE ->
LVDS_ EN : WRI TE- >
SYNC_EN : WRITE ->
CLEAR : WRITE ->
BIST<31:0> : READ -> Results of the Built-in Self Test
REG 22 -> Controller Clock Pre-divider (CCLK_DIV)
Reading REG 22 returns previously written values for all defined register bits unless otherwise noted. Reset value in bold text.
ADR Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0x16 CCLK_DIV RESV’D RESV’D RESV’D RESV’D CCD<3> CCD<2> CCD<1> CCD<0>
CCD<3:0> : WRITE ->
0, No action
1, Enable BIST signature readback
0, No action
1, Enable LVDS BIST
0, No Action
1, Enable SYNC BIST
0, No Action
1, Clear all BIST registers
0x0, Controller Clock = DACCLK / 16
0x1, Controller Clock = DACCLK / 32
0x2, Controller Clock = DACCLK / 64 …
0xF, Controller Clock = DACCLK / 524288
NOTE: The 100MHz to 1.2GHz DACCLK must be divided to less than 10MHz for correct operation. CCD<3:0> must be programmed to
divide the DACCLK so that this relationship is not violated. Controller Clock = DACCLK / ( 2 ^ ( CCD<3:0> + 4 ))
REG 31 -> VERSION
Reading REG 31 returns previously written values for all defined register bits unless otherwise noted. Reset value in bold text.
ADR Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0x1F VERSION VER<5> VER<4> VER<3> VER<2> VER<1> VER<0> RES10 RES12
VER<5:0> : READ -> Version number (part ID), 00001, Revision 1, initial release
RES10 (msb)
RES12 (lsb)
: READ ->
00, 14-bit DAC
01, 12-bit DAC
10, 10-bit DAC
Rev. PrJ | Page 18 of 42

Preliminary Technical Data AD9736/AD9735/AD9734
GENERAL DESCRIPTION
Serial Peripheral Interface
The AD9736/35/34 are 14/12/10-bit DACs which run at an update
rate up to 1.2GSPS. Input data can be accepted up to the full
1.2GSPS rate or a 2x interpolation filter may be enabled (2x mode)
allowing full-speed operation with a 600MSPS input data rate.
DATA and DATACLK_IN inputs are parallel LVDS meeting the
IEEE reduced swing LVDS specifications with the exception of
input hysteresis. The DATACLK_IN input runs at one half the
input DATA rate in a double data rate (DDR) format. Each edge of
DATACLK_IN is used to transfer DATA into the AD9736 as shown
in Figure 25.
The DACCLK (pins E1, F1) directly drives the DAC core to
minimize clock jitter. It is also divided by two (1x and 2x mode)
then output as the DATACLK_OUT. The DATACLK_OUT signal
is used to clock the data source. The DAC expects DDR LVDS data
(DB<13:0>) aligned with the DDR input clock (DATACLK_IN)
from a circuit similar to the one shown in Figure 35. Clock
relationships are shown in Table 6.
MODE DACCLK
1x 1.2GHz 600MHz 600MHz 1.2GSPS
2x 1.2GHz 600MHz 300MHz 600MSPS
Maintaining correct alignment of data and clock is a common
challenge with high-speed DACs, complicated by changes in
temperature and other operating conditions. The AD9736
simplifies this high-speed data capture problem with two adaptive
closed-loop timing controllers.
One timing controller manages the LVDS data and data clock
alignment (LVDS controller) and the other manages the LVDS data
and DACCLK alignment (SYNC controller). The LVDS controller
locates the data transitions and delays the DATACLK_IN so that its
transition is in the center of the valid data window. The SYNC
controller manages the FIFO that moves data from the LVDS
DATACLK_IN domain to the DACCLK domain. Both controllers
can be operated in manual mode under external processor control,
surveillance mode where error conditions generate external
interrupts or automatic mode where errors are automatically
corrected.
The LVDS and SYNC controllers include moving average filtering
for noise immunity and variable thresholds to control their activity.
Normally the controllers can be set to run in automatic mode and
they will make any necessary adjustments without dropping or
duplicating samples sent to the DAC. Both controllers require
initial calibration prior to entering automatic update mode.
DATACLK
OUT
Table 6. AD9736 Clock Relationships
DATACLK
IN
DATA
The AD9736 serial port is a flexible, synchronous serial
communications port allowing easy interface to many industrystandard microcontrollers and microprocessors. The serial I/O is
compatible with most synchronous transfer formats, including both
the Motorola SPI® and Intel® SSR protocols. The interface allows
read/write access to all registers that configure the AD9736. Single
or multiple byte transfers are supported, as well as MSB first or LSB
first transfer formats. The AD9736’s serial interface port can be
configured as a single pin I/O (SDIO) or two unidirectional pins for
in/out (SDIO/SDO).
SDO (Pin G14)
SDIO (Pin F14)
SCLK (Pin G13)
CSB (Pin F13)
Figure 18. AD9736 SPI Port
The AD9736 may optionally be configured via external pins rather
than the serial interface. When the PIN_MODE input (pin L1) is
high the serial interface is disabled and its pins are reassigned for
direct control of the DAC. Specific functionality is described in the
PIN Mode section.
AD9736
SPI Port
GENERAL OPERATION OF THE SERIAL INTERFACE
There are two phases to a communication cycle with the AD9736.
Phase 1 is the instruction cycle, which is the writing of an
instruction byte into the AD9736, coincident with the first eight
SCLK rising edges. The instruction byte provides the AD9736 serial
port controller with information regarding the data transfer cycle,
which is Phase 2 of the communication cycle. The Phase 1
instruction byte defines whether the upcoming data transfer is read
or write, the number of bytes in the data transfer, and the starting
register address for the first byte of the data transfer. The first eight
SCLK rising edges of each communication cycle are used to write
the instruction byte into the AD9736.
The remaining SCLK edges are for Phase 2 of the communication
cycle. Phase 2 is the actual data transfer between the AD9736 and
the system controller. Phase 2 of the communication cycle is a
transfer of 1, 2, 3, or 4 data bytes as determined by the instruction
byte. Using one multibyte transfer is the preferred method. Single
byte data transfers are useful to reduce CPU overhead when
register access requires one byte only. Registers change immediately
upon writing to the last bit of each transfer byte.
Control of the AD9736 functions is via the serially programmed
registers listed in Table 5.
CSB can be raised after each sequence of 8 bits (except the last byte)
to stall the bus. The serial transfer will resume when CSB is
lowered. Stalling on non-byte boundaries will reset the SPI.
Rev. PrJ | Page 19 of 42

AD9736/AD9735/AD9734 Preliminary Technical Data
SHORT INSTRUCTION MODE (8-BIT INSTRUCTION)
should stay low during the entire communication cycle.
The short instruction byte is shown in Table 7.
MSB LSB
I7 I6 I5 I4 I3 I2 I1 I0
R/W N1 N0 A4 A3 A2 A1 A0
Table 7. SPI Instruction Byte
R/W, Bit 7 of the instruction byte, determines whether a read or a
write data transfer will occur after the instruction byte write. Logic
high indicates read operation. Logic 0 indicates a write operation.
N1, N0, Bits 6 and 5 of the instruction byte, determine the number
of bytes to be transferred during the data transfer cycle. The bit
decodes are shown in Table 8.
A4, A3, A2, A1, A0, Bits 4, 3, 2, 1, 0 of the instruction byte,
determine which register is accessed during the data transfer
portion of the communications cycle. For multibyte transfers, this
address is the starting byte address. The remaining register
addresses are generated by the AD9736 based on the LSBFIRST bit
(REG00, bit 6).
N1 N2 Description
0 0 Transfer 1 Byte
0 1 Transfer 2 Bytes
1 0 Transfer 3 Bytes
1 1 Transfer 4 Bytes
Table 8. Byte Transfer Count
LONG INSTRUCTION MODE (16-BIT INSTRUCTION)
The long instruction bytes are shown in Table 7.
MSB LSB
I15 I14 I13 I12 I11 I10 I9 I8
R/W N1 N0 A12 A11 A10 A9 A8
I7 I6 I5 I4 I3 I2 I1 I0
A7 A6 A5 A4 A3 A2 A1 A0
Table 9. SPI Instruction Byte
If LONG_INS = 1 (REG00, bit 4) the instruction byte is extended to
two bytes where the second byte provides an additional 8 bits of
address information. Addresses 0x00 – 0x1F are equivalent in short
and long instruction modes. The AD9736 does not use any
addresses greater than 31 (0x1F) so always set LONG_INS = 0.
SERIAL INTERFACE PORT PIN DESCRIPTIONS
SCLK—Serial Clock. The serial clock pin is used to synchronize
data to and from the AD9736 and to run the internal state
machines. SCLK’s maximum frequency is 20 MHz. All data input
to the AD9736 is registered on the rising edge of SCLK. All data is
driven out of the AD9736 on the rising edge of SCLK.
CSB—Chip Select. Active low input starts and gates a
communication cycle. It allows more than one device to be used on
the same serial communications lines. The SDO and SDIO pins will
go to a high impedance state when this input is high. Chip select
SDIO—Serial Data I/O. Data is always written into the AD9736 on
this pin. However, this pin can be used as a bidirectional data line.
The configuration of this pin is controlled by SDIO_DIR at REG00,
bit 7. The default is Logic 0, which configures the SDIO pin as
unidirectional.
SDO—Serial Data Out. Data is read from this pin for protocols
that use separate lines for transmitting and receiving data. In the
case where the AD9736 operates in a single bidirectional I/O mode,
this pin does not output data and is set to a high impedance stat
e.
MSB/LSB TRANSFERS
The AD9736 serial port can support both most significant bit
(MSB) first or least significant bit (LSB) first data formats. This
functionality is controlled by LSBFIRST at REG00, bit 6. The
default is MSB first (LSBFIRST = 0).
When LSBFIRST = 0 (MSB first) the instruction and data bytes
must be written from most significant bit to least significant bit.
Multibyte data transfers in MSB first format start with an
instruction byte that includes the register address of the most
significant data byte. Subsequent data bytes should follow in order
from high address to low address. In MSB first mode, the serial
port internal byte address generator decrements for each data byte
of the multibyte communication cycle.
When LSBFIRST = 1 (LSB first) the instruction and data bytes
must be written from least significant bit to most significant bit.
Multibyte data transfers in LSB first format start with an
instruction byte that includes the register address of the least
significant data byte followed by multiple data bytes. The serial port
internal byte address generator increments for each byte of the
multibyte communication cycle.
The AD9736 serial port controller data address will decrement
from the data address written toward 0x00 for multibyte I/O
operations if the MSB first mode is active. The serial port controller
address will increment from the data address written toward 0x1F
for multibyte I/O operations if the LSB first mode is active.
NOTES ON SERIAL PORT OPERATION
The AD9736 serial port configuration is controlled by REG00, bits
4, 5, 6 and 7. It is important to note that the configuration changes
immediately upon writing to the last bit of the register. For
multibyte transfers, writing to this register may occur during the
middle of communication cycle. Care must be taken to compensate
for this new configuration for the remaining bytes of the current
communication cycle. The same considerations apply to setting the
software reset, RESET (REG00, bit 5). All registers are set to their
default values EXCEPT REG00 and REG04 which remain
unchanged.
Use of only single byte transfers when changing serial port
Rev. PrJ | Page 20 of 42

Preliminary Technical Data AD9736/AD9735/AD9734
configurations or initiating a software reset is highly
recommended. In the event of unexpected programming sequences
the AD9736 SPI may become inaccessible. For example, if user
code inadvertently changes the LONG_INS bit or LSBFIRST bit the
following bits may have unexpected results. The SPI can be
returned to a known state by writing an incomplete byte (1-7 bits)
of all zeroes followed by three bytes of 0x00. This will return to
MSB first short instructions (REG00 = 0x00) so the device may be
reinitialized.
INSTRUCTION CYCLE DATA TRANSFER CYCLE
CSB
SCLK
SDIO
SDO
CSB
SCLK
SDIO
SDO
CSB
SCLK
SDIO
CSB
R/WN0N1A0A1 A2A3A4D7D6ND5
D7 D6ND5
N
N
Figure 19. Serial Register Interface Timing MSB First
INSTRUCTION CYCLE DATA TRANSFER CYCLE
A0 A1 A2 A3 A4 N1 N0 R/W D0D10D2
D0D10D2
0
0
Figure 20. Serial Register Interface Timing LSB First
t
DS
t
DS
t
PWH
t
t
SCLK
t
PWL
DH
INSTRUCTION BIT 6INSTRUCTION BIT 7
Figure 21. Timing Diagram for SPI Register Write
D00D10D20D3
0
D00D10D20D3
0
D7ND6ND5ND4
N
D7ND6ND5ND4
N
03152-PrD-006
PIN MODE OPERATION
When the PIN_MODE input (pin L1) is set high, the SPI port is
disabled. The SPI port pins are remapped as shown in Table 10. The
function of these pins is described in Table 11. The remaining
PIN_MODE register settings are shown in Table 5, the SPI register
map.
Pin Number PIN_MODE = 0 PIN_MODE = 1
E13 IRQ UNSIGNED
F13 CSB 2X
G13 SCLK FSC0
E14 RESET PD
F14 SDIO FIFO
G14 SDO FSC1
Table 10. SPI_MODE vs. PIN_MODE Inputs
Pin Function
UNSIGNED
2X
0, Two’s complement input data format
1, Unsigned input data format
0, Interpolation disabled
1, Interpolation = 2x enabled
00, Sleep mode
FSC1, FSC0
01, 10mA full scale output current
10, 20mA full scale output current
11, 30mA full scale output current
PD
FIFO
0, Chip enabled
1, Chip in power down state
0, Input FIFO disabled
1, Input FIFO enabled
Table 11. PIN_MODE Input Functions
Care must be taken when using PIN_MODE since only the control
bits shown in Table 11 can be changed. If the remaining register
default values are not suitable for the desired operation
PIN_MODE cannot be used.
SCLK
t
DNV
I1 I0 D7 D6 D5
SDIO
t
DV
Figure 22. Timing Diagram for SPI Register Read
After the last instruction bit is written to the SDIO pin the driving
signal must be set to a high impedance in time for the bus to turn
around. The serial output data from the AD9736 will be enabled by
the falling edge of SCLK. This causes the first output data bit to be
shorter than the remaining data bits as shown in Figure 22.
Rev. PrJ | Page 21 of 42

AD9736/AD9735/AD9734 Preliminary Technical Data
AD9736 DATA INTERFACE CONTROLLERS
There are 2 internal controllers that can be utilized in the operation
of the AD9736. The first controller helps maintain optimum LVDS
data sampling and the second controller helps maintain optimum
synchronization between the DACCLK and the incoming data. The
LVDS controller is responsible for optimizing the sampling of the
data from the LVDS bus (DB13:0) while the SYNC controller
resolves timing problems between the DAC_CLK (CLK+, CLK-)
and the DATACLK. A block diagram of these controllers is shown
in Figure 23.
The controllers are clocked with a divided down version of the
DAC_CLK. The divide ratio is set utilizing the controller clock
predivider bits (CCD<3:0>) located at REG22 bits 3:0 to generate
the controller clock as follows:
Controller Clock = DAC_CLK / ( 2 ^ ( CCD<3 :0> + 4 ))
NOTE: The controller clock may not exceed 10MHz for correct
operation. Until CCD<3:0> has been properly programmed to
meet this requirement the DAC output may not be stable.
The LVDS and SYNC controllers can be independently operated in
3 different modes via SPI port REG06 and REG08.
1. Manual Mode
2. Surveillance Mode
3. Auto Mode
In manual mode all of the timing measurements and updates are
externally controlled via the SPI.
In surveillance mode each controller takes measurements and
calculates a new “optimal” value continuously. The result of the
measurement can be passed through an averaging filter before
evaluating the results for increased noise immunity. The filtered
result is compared to a threshold value set via REG06 and REG08
of the SPI port. If the error is greater then the threshold, an
interrupt is triggered and the controller stops. REG01 of the SPI
port controls the interrupts with bits 3 and 2 enabling the
respective interrupts and bits 7 and 6 indicating the respective
controller’s interrupt. If an interrupt is enabled it will also activate
the AD9736’s IRQ pin. In order to clear an interrupt the interrupt
enable bit of the respective controller must be set to a zero for at
least one controller clock cycle (controller clock < 10MHz).
Auto mode is almost identical to surveillance mode. Instead of
triggering an interrupt and stopping the controller, the controller
automatically updates its settings to the newly calculated “optimal”
value and continues to run.
DACCLK
DACCLK
DATACLK_OUT
DATACLK_OUT
CLK Control
CLK Control
LVDS
LVDS
Data Source
Data Source
i.e. FPGA
i.e. FPGA
DATACLK_IN
DATACLK_IN
DB<13:0>
DB<13:0>
Figure 23.AD9736 Internal Synchronization Engine
Controller
Controller
LVDS
LVDS
SAMPLE
SAMPLE
LOGIC
LOGIC
SYNC
SYNC
Controller
Controller
SYNC
SYNC
LOGIC
LOGIC
FIFO
FIFO
DAC
DAC
Rev. PrJ | Page 22 of 42

Preliminary Technical Data AD9736/AD9735/AD9734
K
AD9736 LVDS Sample Logic
SAMPLING SIGNAL (CSS) is controlled by MHD3:0 (REG04, bits
3:0).
A simplified diagram of the AD9736 LVDS data sampling engine is
shown in Figure 24, with the timing relationships shown in Figure
25.
The incoming LVDS data is latched by the DATA SAMPLING
SIGNAL (DSS) which is derived from DATACLK_IN. The LVDS
controller delays DATACLK_IN to create the DATA SAMPLING
SIGNAL (DSS) which is adjusted to sample the LVDS data in the
center of the valid data window. The skew between the
DATACLK_IN and the LVDS data bits (DB<13:0>) must be
minimal (t1 and t2 in Figure 25) for proper operation. Therefore, it
is recommended that the DATACLK_IN be generated in the same
manner as the LVDS data bits (DB<13:0>) with the same driver and
data lines (i.e. it should just be another LVDS data bit running a
constant 01010101… sequence, as shown in Figure 35).
DB<13:0>
DATA SAMPLING
DATACLK
IN
Figure 24. AD9736 Internal LVDS Data Sampling Logic
LVD S
RX
SIGNAL
SD<3:0>
Sample Delay
LVD S
RX
MSD<3:0>
Delay
MHD<3:0>
Delay
FF
FF
DELAYED
CLOCK
SIGNAL
FF
D1
D2
CHEC
CLOCK
SAMPLING
SIGNAL
LVDS SAMPLE LOGIC CALIBRATION
DATACLK_IN transitions must be time aligned with the LVDS
data (DB<13:0>) transitions. This allows the CLOCK SAMPLING
SIGNAL (CSS, derived from the DATACLK_IN), to find the valid
data window of DB<13:0> by locating the DATACLK_IN edges.
The latching (rising) edge of CSS is initially placed using bits
SD<3:0> and can then be shifted to the left using MSD<3:0> and to
the right using MHD<3:0>. When CSS samples the DELAYED
CLOCK SIGNAL (DCS) and the result is a 1, (which can be read
back via the CHECK bit at REG05, bit 0) then the sampling is
occurring in the correct data cycle. In order to find the leading
edge of the data cycle, increment MSD (Measured Set-up Delay)
until CHECK goes low. In order to find the trailing edge, increment
MHD (Measured Hold Delay) until CHECK goes low. Always set
MHD = 0 when incrementing MSD and vice-versa.
Note: The incremental units of SD, MSD, and MHD are in units of
real time, not fractions of a clock cycle. At this time, the delay from
each increment of these bits has not been fully characterized. Over
process, voltage, and temperature, each increment may introduce
between 25 and 100ps of delay with a nominal target of 80ps.
OPERATING THE LVDS CONTROLLER IN MANUAL
MODE VIA THE SPI PORT
The manual operation of the LVDS controller allows the user to
step through both the set-up and hold delays to calculate the
optimal sampling delay (i.e. center of the data eye).
With SD<3:0> and MHD<3:0> set to zero, increment the set-up
time delay (MSD<3:0>, REG04, bits 7:4) until the check bit
(REG05, bit 0) goes low and record this value. This locates the
leading DATACLK_IN (and DATA) transition as shown in Figure
26.
With SD<3:0> and MSD<3:0> set to zero, increment the hold time
delay (MHD<3:0>, REG04, bits 3:0) until the check bit (REG05 bit
0) goes low and record this value. This locates the trailing
DATACLK_IN (and DATA) transition as shown in Figure 27.
The internal DATA SAMPLING SIGNAL delay must be calibrated
to optimize the data sample timing. Once calibrated, the AD9736
can generate an IRQ or automatically correct its timing if
temperature or voltage variations change the timing too much. This
calibration is done by using the delayed CLOCK SAMPLING
SIGNAL (CSS) to sample the DELAYED CLOCK SIGNAL (DCS).
The LVDS sampling logic can find the edges of the DATACLK_IN
signal and from this measurement the center of the valid data
window can be located.
The internal delay line which derives the delayed DATA
SAMPLING SIGNAL (DSS) from DATACLK_IN is controlled by
SD3:0 (REG05, bits 7:4) while the DELAYED CLOCK SIGNAL
(DCS) is controlled by MSD3:0 (REG04, bits 7:4) and the CLOCK
Rev. PrJ | Page 23 of 42
Once both DATACLK_IN edges are located the Sample Delay
(SD<3:0>, REG05, bits 7:4) must be updated according to the
following equation:
Sample Delay = ( MHD – MSD ) / 2
After updating SD<3:0>, verify that the sampling signal is in the
middle of the valid data window by adjusting both MHD then
MSD with the new sample delay until the CHECK bit goes low. The
new MHD and MSD values should be equal or within one unit
delay if SD<3:0> was set correctly.
NOTE: The Sample Delay calibration just described should be
performed prior to enabling Surveillance mode or Auto mode.

AD9736/AD9735/AD9734 Preliminary Technical Data
SAMPLE
DELAY
PROP DELAY
TO LATCH
PROP DELAY
TO LATCH
Figure 25. AD9736 Internal LVDS Data Sampling Logic Timing
set up time (ts)
MSD<3:0> = 0 1 2 3 4 5
hold time (th)
Sample Delay , SD<3:0>
t1
CSS Samples DCS
t2
DB13:0
DATACLK_IN
DATA SAMPLING
SIGNAL
D1
D2
DB<13:0>
DATACLK_IN
CSS with
MHD<3:0> = 0
DCS, delayed
by MSD<3:0>
CHECK = 1 1 1 1 1 0
CHECK = 1
Figure 26. Set-Up Delay Measurement
set up time (ts)
MHD<3:0> = 0 1 2 3 4 5
CHECK = 1 1 1 1 1 0
hold time (th)
Sample Delay, SD<3:0>
CHECK = 1
CSS Samples DCS
DB<13:0>
DATACLK_IN
CSS, delayed
by MHD<3:0>
DCS with
MSD<3:0> = 0
Figure 27. Hold Delay Measurement
Rev. PrJ | Page 24 of 42

Preliminary Technical Data AD9736/AD9735/AD9734
OPERATING THE LVDS CONTROLLER IN SURVEILLANCE AND AUTO MODE
In surveillance mode, the controller searches for the edges of the
data eye in the same manner as above in the manual mode of
operation and triggers an interrupt if the CLOCK SAMPLING
SIGNAL (CSS) has moved more than the threshold value set by
LTHR<1:0> (REG06, bits 1:0).
There is an internal filter which averages the set-up and hold time
measurements to filter out noise and glitches on the clock lines.
between the DACCLK and the DATACLK_IN clock domains. The
SYNC Controller writes data from DB<13:0> into an eight word
memory based on a cyclic write counter clocked by the CLOCK
SAMPLING SIGNAL (CSS) which is a delayed version of
DACCLK_IN. The data is read out of the memory based on a
second cyclic read counter clocked by DACCLK. The eight word
deep FIFO shown in Figure 28 provides sufficient margin to
maintain proper timing under most conditions. The SYNC logic is
designed to prevent the read and write pointers from crossing. If
the timing drifts far enough to require an update of the phase offset
(PHOF<1:0>) two samples will be duplicated or dropped. Figure 29
shows the timing diagram for the SYNC logic.
Average Value = ( MHD – MSD ) / 2
New Average = Average Value + ( Delta Average / 2 ^ LFLT<3:0> )
If an accumulating error in the Average Value causes it to exceed
the Threshold value (LTHR<1:0>) an interrupt will be issued.
The maximum allowable value for LFLT<3:0> is 12.
In surveillance mode, the ideal sampling point should first be
found using manual mode and applied to the sample delay
registers. The user should then set the threshold and filter values
depending on how far the CSS signal is allowed to drift before an
interrupt occurs. Then set the surveillance bit high (REG06, bit 7)
and monitor the interrupt signal either via the SPI port read back
(REG01, bit 3) or the IRQ pin.
In auto mode, the same steps should be taken to set up the sample
delay, threshold and filter length. In order to run the controller in
auto mode both the LAUTO (REG06, bit 6) and LSURV (REG06,
bit 7) bits need to be set to 1. In AUTO mode the LVDS interrupt
should be set low (REG01, bit 7) to allow the Sample Delay to be
automatically updated if the threshold value is exceeded.
AD9736 SYNC Logic and Controller
A FIFO structure is utilized to synchronize the data transfer
SYNC LOGIC AND CONTROLLER OPERATION
The relationship between the readout pointer and the write pointer
will initially be unknown since the startup relationship between
DACCLK and DATACLK_IN is unknown. The SYNC logic
measures the relative phase between the two counters with the zero
detect block and the Flip Flop in Figure 5 above. The relative phase
is returned in FIFOSTAT<2:0> (REG07, bits 6:4) and SYNC logic
errors are indicated by FIFOSTAT<3> (REG07, bit 7). If
FIFOSTAT<2:0> returns a value of zero or seven it signifies that the
memory is sampling in a critical state (read and write pointers are
close to crossing). If the FIFOSTAT<2:0> returns a value of 3 or 4 it
signifies the memory is sampling at the optimal state (read and
write pointers are farthest apart). If FIFOSTAT<2:0> returns a
critical value the pointer can be adjusted with the phase offset
PHOF<1:0> (REG07, bits 1:0). Due to the architecture of the FIFO
the phase offset can only adjust the read pointer in steps of two.
OPERATING IN MANUAL MODE
Allow DACCLK and DATACLK_IN to stabilize then enable FIFO
mode (REG00, bit 2). Read FIFOSTAT<2:0> (REG07, bits 6:4) to
determine if adjustment is needed. For example if FIFOSTAT<2:0>
= 6 the timing is not yet critical but it is not optimal. To return to
an optimal state (FIFOSTAT<2:0> = 4) the PHOF<1:0> (REG07,
bits 1:0) needs to be set to 1. Setting PHOF<1:0> = 1 effectively
increments the read pointer by 2. This causes the write pointer
value to be captured two clocks later decreasing FIFOSTAT<2:0>
from 6 to 4.
DB<13:0>
DB<13:0>
CSS
CSS
M0
8 Word
8 Word
Memory
Memory
Write
Write
Counter
Counter
M0
M7
M7
Figure 28. SYNC Logic Block Diagram
Rev. PrJ | Page 25 of 42
Adder
Adder
Read
Read
Counter
Counter
DAC<13:0>
DAC<13:0>
ZD
ZD
FFFF
FFFF
PHOF<1:0>
PHOF<1:0>
DACCLK
DACCLK
FIFOSTAT<2:0>
FIFOSTAT<2:0>

AD9736/AD9735/AD9734 Preliminary Technical Data
1
OPERATION IN SURVEILLANCE AND AUTO MODES
Once FIFOSTAT<2:0> has been manually placed in an optimal
state the AD9736 SYNC logic can be run in Surveillance or Auto
mode. To start, turn on Surveillance mode by setting SSURV = 1
(REG08, bit 7) then enable the sync interrupt (REG01, bit 2). If
STRH<0> = 0 (REG08, bit 0) an interrupt will occur if
FIFOSTAT<2:0> = 0 or 7. If STRH<0> = 1 (REG08, bit 0) an
interrupt will occur if FIFOSTAT<2:0> = 0, 1, 6 or 7. The interrupt
can be read at REG01, bit 6 at the AD9736 IRQ pin.
To enter Auto mode, complete the preceding steps then set SAUTO
DACCLK
IN TERN AL_D ELA Y
DATACLK_OUT
EXTERNAL_DELAY
DATACLK_IN
= 1 (REG09, bit 6). Next set the SYNC interrupt = 0 (REG01, bit 2),
to allow the phase offset (PHOF<1:0>) to be automatically updated
if FIFOSTAT<2:0> violates the threshold value.
The FIFOSTAT signal is filtered to improve noise immunity and
reduce unnecessary phase offset updates. The filter operates with
the following algorithm:
FIFOSTAT = FIFOSTAT + Delta FIFOSTAT / 2 ^ SFLT<3:0>
Where 0 <= SFLT<3:0> <= 12. Values greater than 12 are set to 12.
DATA_IN
CSS1
D1
CSS2
D2
WRITE _PTR1
M0
M1
M2
M3
M4
M5
M6
B C D E F G H I J K M OL N P RQA
SAMPLE_HOLD
SAMPLE_SETUP
SAMPLE_DELAY
A
0 1 2 3 4 5 6 7 0 1 2 3
C
B
E
D
G
F
I
H
J
Safe Zone Error Zone
A
B
C
Data ‘A’ can be
D
safely read from
the FIFO in the
E
Safe Zone. In
the Error Zone,
the pointers
F
may briefly
overlap due to
K
M
L
5 6 7 0
I
O
N
J
K
Q
P
FIFOSTAT is set
equal to the
write pointer
L
each time the
read pointer
M
changes from 7
to 0.
G
M7
READ_PTR1
FIFOSTAT
DAC_DATA
4 5 6 7 0 1 2 3 4 5 6 740
44 4
A B C D E F G H I J K L M
H
1 2 3 4
Figure 29. SYNC Logic Timing Diagram
Rev. PrJ | Page 26 of 42

Preliminary Technical Data AD9736/AD9735/AD9734
AD9736 DIGITAL BUILT-IN SELF TEST
BIST may be used to validate data transfer to the AD9736 in
addition to final ATE device verification. There are 4 BIST
signatures that can be read back using Registers 18-21 based on the
setting of the BIST selection bits (REG17, bits 7:6) as shown in
Table 12.
1 - LVDS Phase 1 0 0
2 - LVDS Phase 2 0 1
3 - SYNC Phase 1 1 0
4 - SYNC Phase 2 1 1
Table 12. BIST Selection Bits
The BIST signature returned from the AD9736 will depend on the
input DATA during the test. Since the filters in the DAC have
SEL<1> SEL<0>
D1
memory, it is important to put the correct idle value on the DATA
inputs to flush the memory prior to reading the BIST signature.
Placing the idle value on the data inputs also allows the BIST to be
setup while the DAC clock is running. The idle value should be all
zeroes in unsigned mode (0x0000) and all zeroes except for the
MSB in two’s complement mode (0x2000).
The BIST consists of two stages; the first stage is after the LVDS
receiver and the second stage is after the FIFO stage. The first BIST
stage verifies correct sampling of the data from the LVDS bus while
the second BIST stage verifies correct synchronization between the
DAC_CLK domain and the DATA_CLK domain. The BIST vector
is generated using 32 bit LFSR signature logic. Since the internal
architecture is a two bus parallel system there are two 32-bit LFSR
signature logic blocks on the both the LVDS and SYNC blocks.
Figure 30 shows where the LVDS and SYNC phases are located.
SYNC Logic
DB<13:0>
DATACLK_IN
LVD S
RX
Figure 24
LVD S
BIST
PH1
D2
LVD S
BIST
PH2
Figure 30. Block Diagram Showing LVDS and SYNC Phase 1 and Phase 2
BIST OPERATION
The internal signature generator processes the input data to create
the BIST signatures. An external program which implements the
same algorithm may be used to generate the expected signature for
comparison. A Matlab routine can be provided upon request to
perform this function.
Clock the test vector in as described below and compare the
signature register values to the expected value to verify correct
operation and input data capture.
With all clocks running:
1. Apply the idle vector to the data inputs (0x0000 if
unsigned, 0x2000 if two's complement) for 1024 clocks,
2. Set LVDS_EN (REG17, bit 2) and SYNC_EN (REG17, bit
1) high,
SYNC
FIFO 2x
SPI Port
3. Set CLEAR (REG17, bit 0) high,
4. Set CLEAR low to clear the BIST signature register,
5. Clock the BIST vector into the LVDS data inputs,
6. After the BIST vector is complete, return the inputs to the
idle vector value,
7. Set LVDS_EN (REG17, bit 2) and SYNC_EN (REG17, bit
1) low,
8. Set the desired SEL<1:0> bits and read back the four
BIST signature registers (REG18, 19, 20 and 21).
When the DAC is in 1x mode, the signature at SYNC BIST, Phase 1
should equal the signature at LVDS BIST, Phase 1. The same is
true for Phase 2. BIST does not support 2x mode.
BIST
PH1
SYNC
BIST
PH2
DAC
Rev. PrJ | Page 27 of 42

AD9736/AD9735/AD9734 Preliminary Technical Data
AD9736 ANALOG CONTROL REGISTER
The AD9736 includes some registers for optimizing its analog
performance. These registers include temperature trim for the
bandgap, noise reduction in the output current mirror and output
current mirror headroom adjustments.
BANDGAP TEMPERATURE CHARACTERISTIC TRIM BITS
Using TRMBG<2:0> (REG14, bits 2:0) the temperature
characteristic of the internal bandgap can be trimmed to minimize
the drift over temperature as shown in Figure 31.
MIRROR ROLL OFF FREQUENCY CONTROL
With MSEL<1:0> (REG14, bits 7:6) the user can adjust the noise
contribution of the internal current mirror to optimize the 1/F
noise. Figure 32 shows MSEL vs. the 1/F noise with 20mA FullScale current into a 50ohm resistor.
Figure 32. 1/F Noise With Respect to MSEL Bits
Figure 31. BANDGAP Temperature Characteristic for Various TRMBG Values
It is important to note that the temperature changes are sensitive to
process variations and the above plot may not be representative of
all fabrication lots. Optimum adjustment requires measurement of
the device operation at two temperatures and development of a
trim algorithm to program the correct TRMBG<2:0> values in
external non-volatile memory.
HEADROOM BITS
HDRM<7:0> (REG15, bits 7:0) is for internal evaluation and it is
not recommended to change them from their default reset values.
Rev. PrJ | Page 28 of 42

Preliminary Technical Data AD9736/AD9735/AD9734
VOLTAGE REFERENCE
The AD9736 output current is set by a combination of digital
control bits and the I120 reference current as shown in Figure 33.
AD9736
Vbg
1.2V
Vref
I120
1nF
10kΩ
The reference current is obtained by forcing the bandgap voltage
across an external 10kohm resistor from I120 (pin B14) to ground.
The 1.2V nominal bandgap voltage (Vref) will generate a 120uA
reference current in the 10k resistor. This current is adjusted
digitally by FSC<9:0> (REG02, REG03) to set the output full scale
current I
FS
:
FS
Vref
R
I120
Figure 33. Voltage Reference Circuit
⎛
⎜
27
⎜
⎝
192
⎛
⎜
1024
⎝
FSC<9:0>
Current
Scaling
FSCI
DAC
Ifull-scale
⎞
⎞
⎟
><×+×= 0:9
⎟
⎟
⎠
⎠
The full scale output current range is 10mA to 30mA for register
values from 0x000 to 0x3FF. The default value of 0x200 generates
20mA full scale. The typical range is shown in
35
30
25
20
(ma)
FS
I
15
10
5
0
0 200 400 600 800 1000
Figure 34. IFS vs. DAC Gain Code
VREF (pin C14) must be bypassed to ground with a 1nF capacitor.
The bandgap voltage is present on this pin and may be buffered for
use in external circuitry. The typical output impedance is near
5kohms. If desired, an external reference may be used to overdrive
the internal reference by connecting it to the VREF pin.
IPTAT (pin D14) is used for factory testing. It may be left floating
(preferred) or tied to analog ground. It will output a current which
is proportional to absolute temperature. The nominal output is
approximately 10uA at 25C. The slope is approximately 20nA per
degree C.
DAC gain code
Figure 34.
Rev. PrJ | Page 29 of 42

AD9736/AD9735/AD9734 Preliminary Technical Data
B
APPLICATIONS INFORMATION
FPGA/ASIC DAC DRIVER REQUIREMENTS
To achieve data synchronization using the high speed capability of
the AD9736, ADI recommends the configuration in Figure 35 for
the FPGA/ASIC driving the digital inputs. Using the Double Data
Rate DATACLK_OUT, this configuration will generate the LVDS
DATACLK_IN to drive the AD9736 at the DDR rate. The circuit
also synchronizes the DATACLK_IN and the digital input data
(DB<13:0>) as required by the AD9736. The synchronization
engine in the AD9736 then uses DATACLK_IN to generate the
internal CLOCK SAMPLING SIGNAL to capture the incoming
data via the Manual, Surveillance or Auto mode.
To operate in 2x mode, the circuit in Figure 35 must be modified to
include a divide-by-two block in the DATACLK_OUT path.
Without this additional divider the DATA and DATACLK_IN will
be running 2x too fast. DATACLK_OUT is always DACCLK/2.
Figure 35. Recommended FPGA/ASIC Configuration for Driving AD9736
Digital Inputs, 1x Mode
DATA1
DATA2
D1
D2
DB
A C E
B D
Figure 36. FPGA/ASIC Timing for Driving AD9736 Digital Inputs, 1x Mode
DATACLK_OUT+
DATACLK_IN+
TIMING ERROR BUDGET
The following components make up the timing error budget for the
AD9736:
1. AD9736 DATACLK_OUT jitter
2. AD9736 DATACLK_IN jitter
A
A
B C
C
D
3. DB13:0 jitter
4. DB13:0 skew from data source
5. DB13:0 receiver skew margin (board + AD9736 internal
delays)
6. DB13:0 to DATACLK_IN skew from data source
Rev. PrJ | Page 30 of 42

Preliminary Technical Data AD9736/AD9735/AD9734
AD9736 EVALUATION BOARD SCHEMATICS
D
DEVORPPAETAD
MRJ
82.8030.bveragbcadagigmorfatadecruoSA
1
SNOISIVER
NOITPIRCSEDVER
C
B
A
VERREBMUNGNIWARDONMCSFEZIS
C
5
F0
1
TEEHS
91.5040=ETADELIF
1234
ELACSTONODELACS
ENON
B NEGORDYH
GNIRUTCAFUNAM
78810AM,NOTGNIMLIW
TEERTSNRUBOW408
NOTGNIMLIW
234
ASSV
SRETLIFTUPNIREWOP
:YBDEVORPPA:YBNWARD
TUDREDNU
1PJ
SSV
33DDV
4PT
DER
ETI
RREF6L
0121CL
11BT
GID33
SSV
KLB
FU01
V3.6
41C
ESACA
21BT
SSV
B81DDV
5PT
FU01
V3.6
22C
7PT
ESACA
DER
ETIRREF7L
0121CL
D
A81DDV
SSV
31PT
KLB
6PT
D
E
R
ETIRREF5L
0121CL
31BT
GID81
SSV
41PT
KLB
FU01
V3.6
81C
ES
A
CA
41BT
SSV
C
33ADDV
DER
1PT
ETIRREF1L
0121CL
ANA33
12BT
B
ASSV
CDDV
DER
9PT
KLB
FU01
1C
ESACA
3PT
V3.6
ETIRREF3L
0121CL
ANA81
32BT
22BT
ASSV
ASSV
KLB
FU01
01C
ESACA
11PT
V
3
.6
ETIRREF4L
0121CL
42BT
ASSV
A
Figure 37. Power Supply Inputs for AD9736 Evaluation Board, Rev C
Rev. PrJ | Page 31 of 42

AD9736/AD9735/AD9734 Preliminary Technical Data
D
8C
3060CC
C
PND
P1BD
N1BD
P0BD
N0BD
B
NINKLCD
NIPKLCD
P4BD
N4BD
P3BD
N3BD
P2BD
N2BD
N5
BD
P7BD
N7BD
P6BD
N6BD
P5BD
A
C
5NEGORDYH
FO
VER
PND
43C
3060CC
2
SSV
11M
01M
41H1H
21H
31H
1
11H
41J
21DDV
61DDV1DDV
31DDV
51DDV
41DDV
NEGORDYH
21K
11K
11L
31J
21J
11DDV
01DDV
01L
11J
9L
02SSV
61SSV
71SSV
81SSV
91SSV
9DDV
21M
21L
9M
11SSV
31SSV
21SSV
41SSV
51SSV
1U
7DDV
3DDV
2DDV
4DDV
8DDV
5DDV
6DDV
4H
2H
3H
52C
FN1
3060CC3060CCESACA
FU1.0
7C
42C
3060CC
3J
2J1J4J
PND
3K
5
2SSV
4SSV
3SSV
1SSV
SSV
4K
5L
6L
4L
3L
FN1
12C
3060CC3060CCESACA
FU1.0
02C
01SSV
8SSV
9SSV
7SSV
6SSV
5M
3M
4M
6M
31
51PJ
BA
2
234
FU7.4
FU7.4
V3.6
32C
A81DDV
SSV
V3.6
91C
33DDV
SSV
B81DDV
FU7.4
V3.6
2C
ASSV
NI
PI
3C
4C
33ADDV
ESACA
FU1.0
3060CC
FN1
3060CC
K0161R
THW
2PT
QR
I
PNDPND
6C
31M
31K
N3
1SDVL
12SSV
2K
33DDV
3060CR
41M
41K
31L
41L
N11SDVL
P31SDVL
P21SDVL
N21SDVL
P11SDVL
EDOM_
P0SDVL
N0SDVL
22SSV
1KCN
IPS
1M
2M
1K
1L
2L
P31BD
N31BD
31
8PJ
BA
2
K00.01
ASSV
%1.
ASSV
FN1
9C
3060CC
ERAPS
61PT
THW
21PT
THW
TATPI
JP4
21N
31N
11N
41N
41P
31P
N01SDVL
P01SDVL
N9SDVL
P9SDVL
P1SDVL
P2SDVL
N2SDVL
N1SDVL
1N
2N
1P
2P
P21BD
P11BD
N21BD
N11BD
1R
QRI
01N
21P
11P
01P
8M
9N
8N
9P
8P7P
8L
533DDV433D
733DDV
633DDV
833DDV
PNIKLCSDVL
P8SDVL
N8SDVL
N3SDVL
P3SDVL
3N
4N
3P
P01BD
N01BD
01PT
THW
021I
THW
8PT
FERV
A_TESER
NNIKLCSDVL
P6SDVL
N6SDVL
P7SDVL
N7SDVL
PTUOKLCSDVL
NTUOKLCSDVL
P5SDVL
N5SDVL
P4SDVL
N4SDVL
6N
6P
5P5N4P
TUOPKLCD
TUONKLCD
P9BD
P8BD
N9BD
N8BD
MOTTOB
233DDV
133DDV
333DDV
DV
7M
7N
7L
71C
FN1
3060CC3060CCESACA
FU1.0
61C
FU7.4
V3.6
51C
33DDV
33DDV
13
24
TESER
JP3
IDSPS
BSCPS
ODSPS
KLCPS
5;SSV
1WS
RC1206
5R
K01
1234
SSV
SSV
ASSV
21G4G
41G
21D
31D
21C
01B
11C
01C
8B
4133ASSV
3133ASSV
1PI
2PI
3PI3NI
4PI4NI
POT
133ASSV
233ASSV
2NI
1NI
5A4A4B
7B
7A
9C
81
9133ASSV
6133ASSV
7133ASSV
5133ASSV
33ASSV
633ASSV
733ASSV
533ASSV
433ASSV
333ASSV
4C
6A
5B
6B
11A
01A
11B
9B
9A
8C7C
8D7D
8A
11D
21A
01D
9D
0233ASSV
2233ASSV
1233ASSV
3233ASSV
133ADDV
4233ASSV
1133ASS
2133ASSV
0133ASSV
833ASSV
933ASSV
1CDDV
V
6D5D4D6C5C
1A
31C
41B
41A
31B
31A
21B
433ADD
333ADDV
633ADDV
733ADDV
533ADDV
233ADDV
V
3CDDV
4CDDV
5CDDV
7CDDV
2CDDV
2A
6CDDV
1C
2B1B3A
3B
41D
41C
833ADDV
021I
TATPI
ERAPS
FERV
11CDDV
01CDDV
8CDDV
9CDDV
1CSSV
1D
3D
2C
2D
3C
31G
41E
31E
31F
41F
TESER_DP
KLCS_0CSF
QRI_DENGIS
BSC_X2
OIDS_OFIF
ODS_1CSF
5CSSV
4CSSV
3CSSV
2CSSV
PKLC
NKLC
1F
1E
2F
4E3E2E
11G
21E
11E
21F
11F
3DLEIHS
4DLEIHS
1DLEIHS
2DLEIHS
5DLEIHS
6DLEIHS11CSSV
NEGORDYH
1U
01CSSV
9CSSV
8CSSV
6CSSV
7CSSV
3G
2G
1G
4F
3F
3060CC
FN1
3060CC 3060CC
5C
PKLC
NKLC
CDDV
D
C
B
31C
3060CCESACA
FU1.0
21C
11C
ASSV
V3.6
FU7.4
A
Figure 38. Circuitry Local to AD9736, Evaluation Board, Rev C
Rev. PrJ | Page 32 of 42

Preliminary Technical Data AD9736/AD9735/AD9734
D
C
B
A
C
FO 53NEGORDYH
TUONKLCD
NINKLCD
N01BD
N11BD
N31BD
N21BD
N8BD
N7BD
N9BD
1
N6BD
N5BD
N0BD
N1BD
N2BD
N3BD
N4BD
P0BD
P1BD
P2BD
P3BD
P4BD
SSV
TUOPKLCD
NIPKLCD
P01BD
P11BD
P31BD
P21BD
P8BD
P7BD
P6BD
P5BD
P9BD
VER
1234
3J
FCN-268 F024-G/0 D
Jack
G49 G50
S47 S48
G47 G48
S45 S46
G45 G46
S43 S44
G43 G44
S41 S42
G41 G42
S39 S40
G39 G40
S37 S38
G37 G38
234
S2
G2
S35 S36
G35 G36
S33 S34
G33 G34
S31 S32
G31 G32
S29 S30
G29 G30
S27 S28
G27 G28
S25 S26
G25 G26
S23 S24
G23 G24
S21 S22
G21 G22
S19 S20
G19 G20
S17 S18
G17 G18
S15 S16
G15 G16
S13 S14
G13 G14
S11 S12
G11 G12
S9 S10
G9 G10
S7 S8
G7 G8
S5 S6
G5 G6
S3 S4
G3 G4
1S
G1
Jack
51PT
THW
NTUOTSET
D
C
KLCTXE
B
Figure 39. High Speed Digital I/O Connector, AD9736 Evaluation Board, Rev C
Rev. PrJ | Page 33 of 42
PTUOTSET
A

AD9736/AD9735/AD9734 Preliminary Technical Data
D
CDDV
PKLC
NKLC
1
3060CR
3060CR
5212R
5202R
FU1.0
FU1.0
CC0603
234
CC0603
63C
53C
43
6
XX21-1LTDA
SP
A3T
1
C
B
A
C
54NEGORDYH
FO
VER
ASSV
1234
FN1
83C
3060CC
PND
72C
3060CC
PND
62C
3060CC
3R
K1
RC0603
92C
FN1
3060CC
FU1.0
82C
3060CC
ASSV
PU002AMS
003
4R
RC0603
5,4,3;ASSV
2J
Jumper Added
3
15
31-1-1CTE
SP
B3T
2=CN
4
1T
1234
P1-T1-2TDA
S P
5
6
51
4
31-1-1CTE
PS
2=CN
B4T
3
ASSV
ASSV
5,4,3;ASSV
PU002AMS
1J
NOTE:
T1, T3 & T3B are installed,
R6 & R8 = 50 ohms,
R17 & R19 = 20 ohms,
R161 & R162 = 0 ohms,
R7 = Open
Jumper added from T1 pin 3
to T1 pin 2
D
Figure 40. Clock Input and Analog Output, AD9736 Evaluation Board, Rev C
4
3421
P1-T1-2TDA
2T
S P
6
5
161RPND71RPND
PND
81R
RC0603
3060CR 3060CR
PND
6R
9.94
7R
RC0603 RC0603RC0603
ASSV
NI
C
B
51
31-1-1CTE
PS
2=CN
3T
3
261RPND
3060CR
91RPND
3060CR
PND
8R
PI
ASSV
A
Rev. PrJ | Page 34 of 42

Preliminary Technical Data AD9736/AD9735/AD9734
D
1
234
C
B
A
C
55NEGORDYH
FO
VER
1234
33C
FU1.
1P
12453
5080CR
K901R
6
2
5080CR
K911R
5080CR
K921R
FU7.4
V3.6
23C
13C
FU1.
FU7.4
V3.6
03C
ESACA 5080CC ESACA 5080CC
33DDV
2
TROPIPS
41;33DDV
41;33DDV
7;SSV
3121
5U
5U
41CA47
41;33DDV
7;SSV
12
5U
5U
41CA47
5PJ
SSV33DDV
31
31PJ
BA
2
6PJ
SSV33DDV
31
41PJ
BSCPS
9PJ
BA
2
KLCPS
41;33DDV
7;SSV
7;SSV
1101
98
5U
41CA
47
41;33DDV
7;SSV
34
56
5U
41CA
47
SSV33DDV
7PJ
31
BA
2
IDSPS
41CA4741CA47
2131
6U
41CA47
41
;33DDV
7;SSV
21
6U
41CA47
6U
41;33DDV
7;SSV
6U
41;33DDV
7;SSV
41R31R
K01
RC0603
K01
RC0603
SSV33DDV
2PJ
31
01PJ
BA
2
SSV33DDV
31
11PJ
BA
ODSPS
41CA47
41CA47
0111
89
6U
41;33DDV
41;33DDV
7;SSV
7;SSV
41CA47
41CA47
65
43
6U
41;33DDV
41;33DDV
7;SSV
7;SSV
ETIRREF9L
ETIRREF8L
0121CL
0121CL
SSV
SSV
A_TESER
SSV33DDV
QRI
31
21PJ
2
BA
2
D
C
B
A
Figure 41. SPI Port Interface, AD9736 Evaluation Board, Rev C
Rev. PrJ | Page 35 of 42

AD9736/AD9735/AD9734 Preliminary Technical Data
AD9736 EVALUATION BOARD PCB LAYOUT
NOTE:
AD9736 is soldered
directly to the PCB,
the socket is not
installed.
Silkscreen Error:
SPI
PIN
Figure 42. PCB Layout Top Placement, AD9736 Evaluation Board, Rev C
Rev. PrJ | Page 36 of 42

Preliminary Technical Data AD9736/AD9735/AD9734
Figure 43. PCB Layout Layer 1, AD9736 Evaluation Board, Rev C
Rev. PrJ | Page 37 of 42

AD9736/AD9735/AD9734 Preliminary Technical Data
Figure 44. PCB Layout Layer 2, AD9736 Evaluation Board, Rev C
Rev. PrJ | Page 38 of 42

Preliminary Technical Data AD9736/AD9735/AD9734
Figure 45. PCB Layout Layer 3, AD9736 Evaluation Board, Rev C
Rev. PrJ | Page 39 of 42

AD9736/AD9735/AD9734 Preliminary Technical Data
Figure 46. PCB Layout Layer 4, AD9736 Evaluation Board, Rev C
Rev. PrJ | Page 40 of 42

Preliminary Technical Data AD9736/AD9735/AD9734
Figure 47. PCB Layout Bottom Placement, AD9736 Evaluation Board, Rev C
Rev. PrJ | Page 41 of 42

AD9736/AD9735/AD9734 Preliminary Technical Data
PR04862-0-9/04(PrJ)
NOTE:
Special layer stack
to control LVDS
trace impedance.
Figure 48. PCB Fabrication Detail, AD9736 Evaluation Board, Rev C
Rev. PrJ | Page 42 of 42
 Loading...
Loading...