

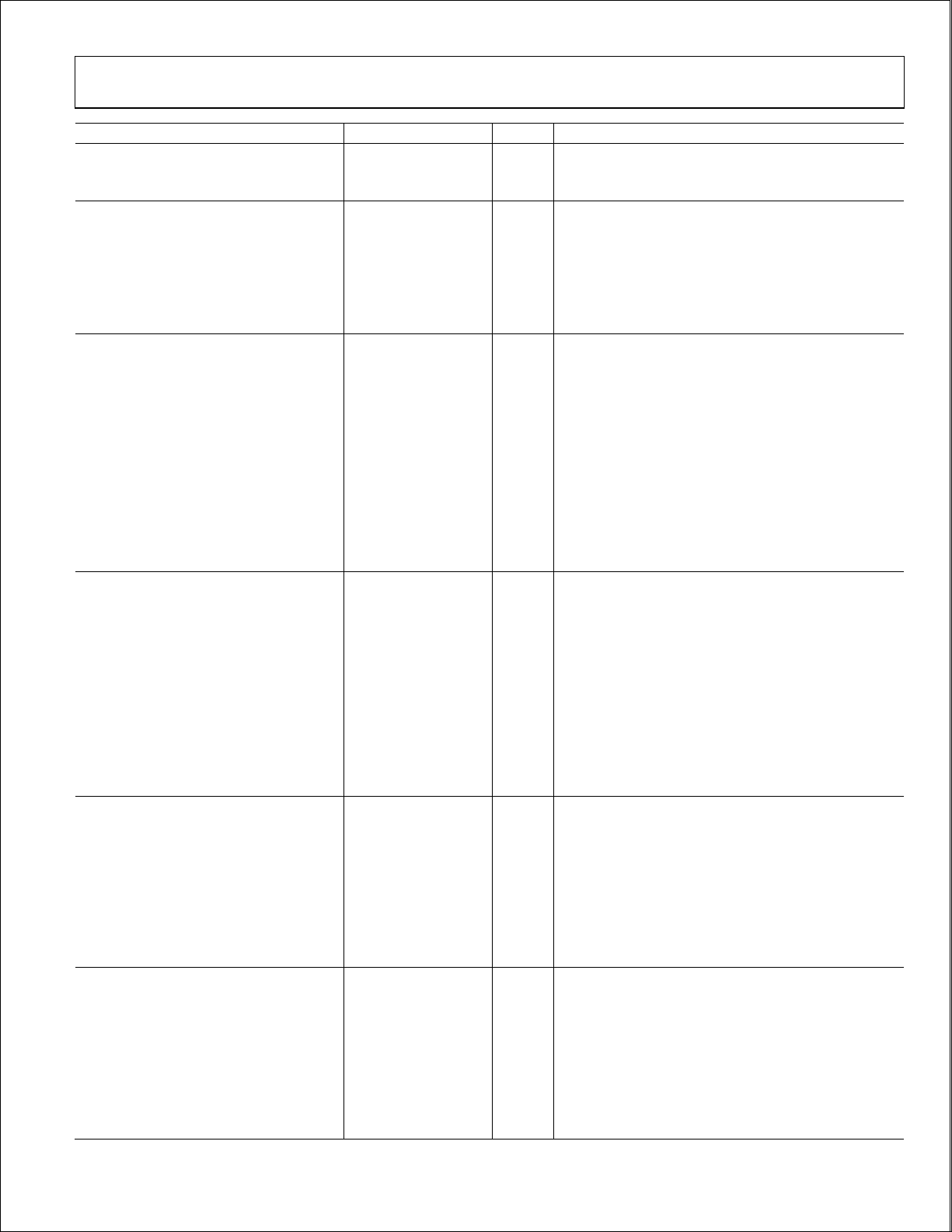
12路LVPECL/24路CMOS输出时钟
特性
低相位噪声锁相环(PLL)
片内VCO调谐范围:2.53 GHz至2.95 GHz
支持最高2.4 GHz的外部3.3 V/5 V VCO/VCXO
1路差分或2路单端参考输入
支持最高250 MHz的CMOS、LVDS或LVPECL参考
参考输入接受16.67 MHz至33.3 MHz晶振
可选参考时钟倍频器
参考监控功能
自动和手动参考切换/保持模式,支持可选的恢复式/非恢
复式切换
参考间无毛刺切换
从保持模式自动恢复
可选数字或模拟锁定检测
可选零延迟工作
12路1.6 GHz LVPECL输出分为4组
每组3路输出,具有一个带相位延迟的1至32分频器
加性输出抖动低至225 fs rms
分组输出的通道间偏斜:<16 ps
可以将每路LVPECL输出配置为2路CMOS输出(fOUT ≤ 250
MHz)
上电时所有输出自动同步
可以根据需要手动同步多路输出
SPI和I²C兼容型串行控制端口
64引脚LFCSP封装
非易失性EEPROM存储配置设置
应用
低抖动、低相位噪声时钟分配
SONET、10Ge、10G FC和其它10 Gbps协议的时钟产生和转换
前向纠错(G.710)
为高速ADC、DAC、DDS、DDC、DUC、MxFE提供时钟
高性能无线收发器
自动测试设备(ATE)和高性能仪器仪表
宽带基础设施
概述
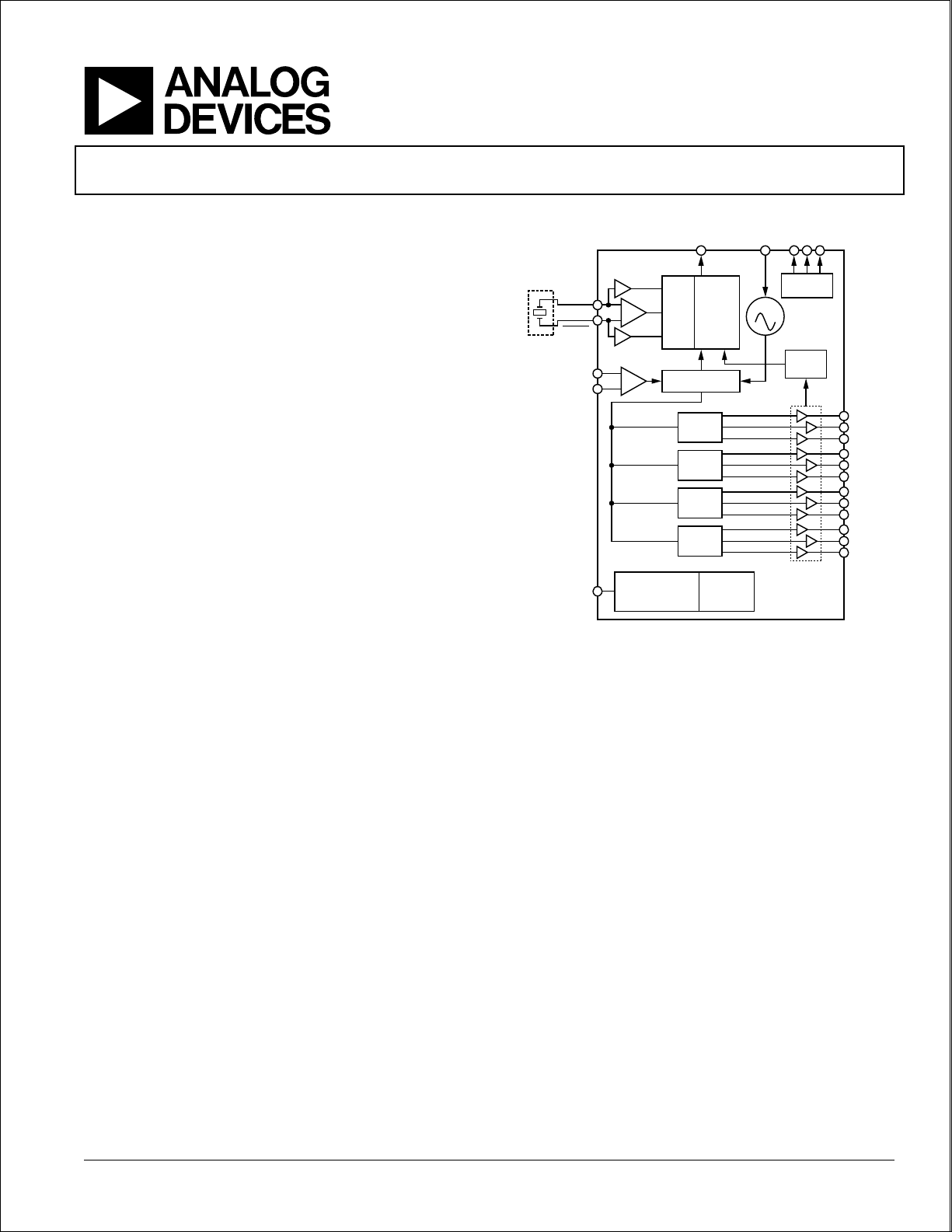
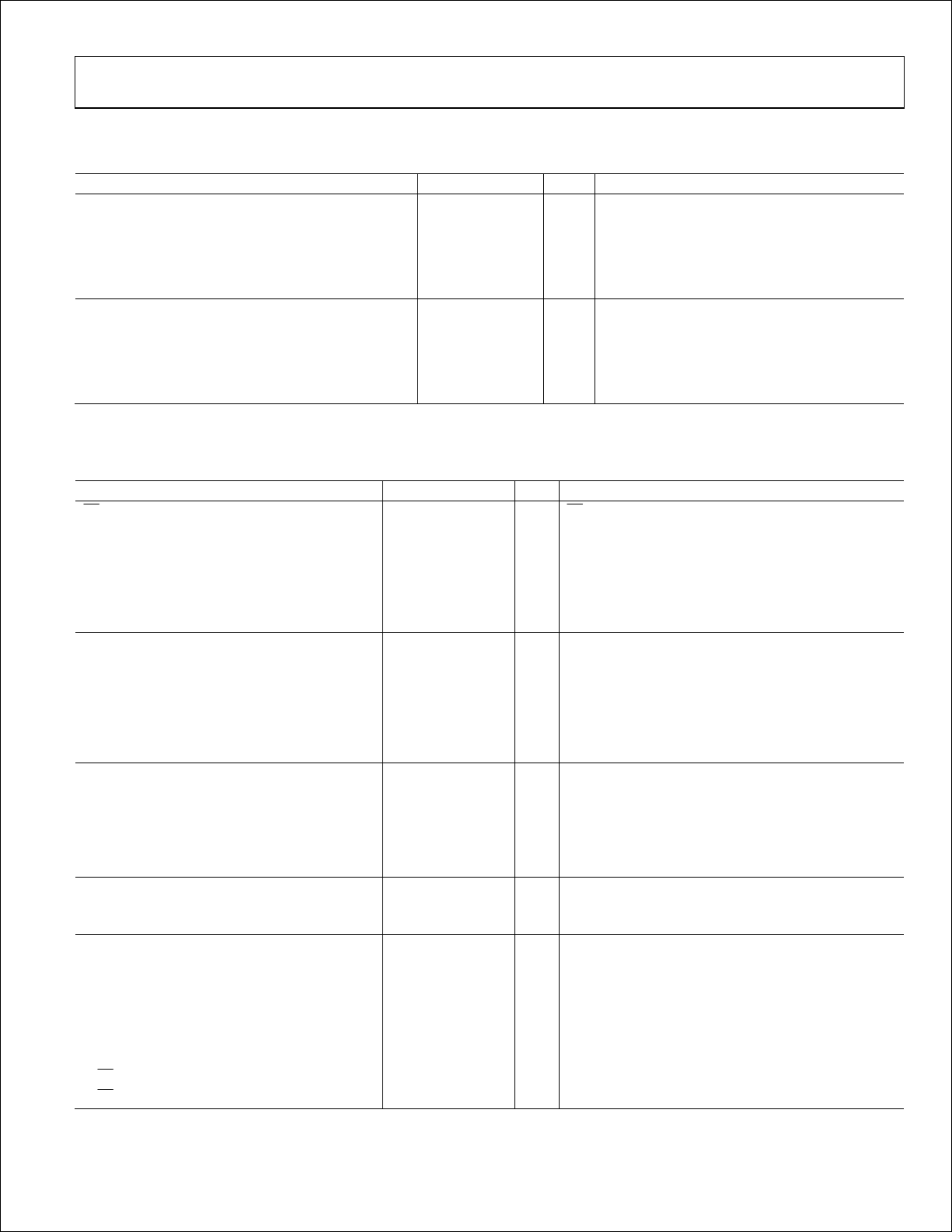
AD9520-01提供多路输出时钟分配功能,具有亚皮秒级抖动
性能,并且片内集成锁相环(PLL)和电压控制振荡器(VCO)。
片内VCO的调谐频率范围为2.53 GHz至2.95 GHz。也可以使
用最高2.4 GHz的外部3.3 V/5 V VCO/VCXO。
发生器,集成2.8 GHz VCO
AD9520-0
功能框图
CP
OPTIONAL
REFIN
REFIN
CLK
REF1
REF2
SWITCHOVER
DIVIDER
AND MUXES
SPI/I2C CONTROL
PORT AND
DIGITAL LOGIC
AND MONITOR
DIV/
DIV/
DIV/
DIV/
Φ
Φ
Φ
Φ
EEPROM
图1
AD9520串行接口支持SPI和I2C®端口。封装内EEPROM可
以通过串行接口进行编程,存储用于上电和芯片复位的用
户定义寄存器设置。
AD9520具有12路LVPECL输出,分为四组。任何一路1.6
GHz LVPECL输出都可以重新配置为两路250 MHz CMOS输
出。
每组输出具有一个分频器,其分频比(从1至32)和相位(粗
调延迟)均可以设置。
AD9520提供64引脚LFCSP封装,可以采用3.3 V单电源供电。
外部VCO的工作电压最高可达5.5 V。独立的输出驱动器电
源可以为2.375 V至3.465 V。
AD9520的额定工作温度范围为−40°C至+85°C标准工业温
度范围。
LF
STATUS
MONITOR
VCO
PLL
ZERO
DELAY
LVPECL/
CMOS
AD9520
OUT0
OUT1
OUT2
OUT3
OUT4
OUT5
OUT6
OUT7
OUT8
OUT9
OUT10
OUT11
07213-001
1
AD9520在本数据手册中泛指AD9520系列的所有器件。但是,使用AD9520-0时,它仅指AD9520系列的该特定器件。
Rev. 0
Information furnished by Analog Devices is believed to be accurate and reliable. However, no
responsibility is assumed by Analog Devices for its use, nor for any infringements of patents or other
rights of third parties that may result from its use. Specications subject to change without notice. No
license is granted by implication or otherwise under any patent or patent rights of Analog Devices.
Trademarks and registered trademark
ADI中文版数据手册是英文版数据手册的译文,敬请谅解翻译中可能存在的语言组织或翻译错误,ADI不对翻译中存在的差异或由此产生的错误负责。如需确认任何词语的准确性,请参考ADI提供
的最新英文版数据手册。
s are the property of their respective owners.
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781.329.4700 www.analog.com
Fax: 781.461.3113 ©2008 Analog Devices, Inc. All rights reserved.
AD9520-0
目录
特性....................................................................................................1
应用....................................................................................................1
概述....................................................................................................1
功能框图...........................................................................................1
修订历史...........................................................................................3
技术规格...........................................................................................4
电源要求......................................................................................4
PLL特性 .......................................................................................4
时钟输入......................................................................................7
时钟输出......................................................................................7
时序特性......................................................................................8
时序图.....................................................................................9
时钟输出加性相位噪声(仅分配;
未使用VCO分频器) ...............................................................10
时钟输出绝对相位噪声(使用内部VCO)........................... 11
时钟输出绝对时间抖动(使用内部VCO
的时钟产生).............................................................................11
时钟输出绝对时间抖动(使用内部
VCO的时钟净化).................................................................... 11
时钟输出绝对时间抖动(使用外部
VCXO的时钟产生)................................................................. 12
时钟输出加性时间抖动(未使用
VCO分频器) ............................................................................12
时钟输出加性时间抖动(使用VCO分频器) ......................13
串行控制端口—SPI模式 ....................................................... 13
2
串行控制端口—I
PD, SYNC和RESET引脚........................................................ 15
串行端口设置引脚:SP1、SP0 ........................................... 15
LD、STATUS和REFMON引脚 ...........................................15
功耗 ........................................................................................... 16
绝对最大额定值........................................................................... 17
热阻 ........................................................................................... 17
ESD警告.................................................................................... 17
引脚配置和功能描述 .................................................................. 18
典型工作特性 ...............................................................................21
术语................................................................................................. 26
详细框图........................................................................................ 27
工作原理........................................................................................ 28
C模式 ....................................................... 14
工作配置.........................................................................................28
模式0:内部VCO和时钟分配..............................................28
模式1:时钟分配或外部VCO <1600 MHz ........................30
模式2:高频时钟分配—CLK或外部
VCO > 1600 MHz .....................................................................32
锁相环(PLL) .............................................................................34
PLL配置 .....................................................................................34
鉴频鉴相器(PFD) ...................................................................34
电荷泵(CP) ...............................................................................35
片内VCO ...................................................................................35
PLL外部环路滤波器 ...............................................................35
PLL参考输入.............................................................................35
参考切换....................................................................................36
参考分频器R.............................................................................36
VCO/VCXO反馈分频器N:P、A、B、R.........................36
数字锁定检测(DLD) ..............................................................38
模拟锁定检测(ALD) ..............................................................38
电流源数字锁定检测(CSDLD) ............................................38
外部VCXO/VCO时钟输入(CLK/CLK) ..............................39
保持 ............................................................................................39
外部/手动保持模式.................................................................39
自动/内部保持模式.................................................................39
频率状态监控器.......................................................................41
VCO校准 ...................................................................................42
零延迟操作.....................................................................................43
内部零延迟模式.......................................................................43
外部零延迟模式.......................................................................43
时钟分配.........................................................................................44
工作模式....................................................................................44
CLK或VCO直接至LVPECL输出..........................................44
时钟分频....................................................................................45
VCO分频器...............................................................................45
通道分频器 ...............................................................................45
同步输出—SYNC功能............................................................47
LVPECL输出驱动器................................................................49
CMOS输出驱动器 ...................................................................49
Rev 0 | Page 2 of 84
AD9520-0
复位模式....................................................................................... 49
上电复位.................................................................................. 49
通过RESET引脚进行硬件复位........................................... 49
通过串行端口进行软复位................................................... 50
通过串行端口软复位到EEPROM中
的设置(EEPROM引脚= 0时)............................................... 50
关断模式....................................................................................... 50
通过PD关断芯片 ...................................................................50
PLL关断 ................................................................................... 50
分配关断.................................................................................. 50
各时钟输出独立关断............................................................ 50
各时钟通道独立关断............................................................ 50
串行控制端口 ..............................................................................51
2
C端口选择 .......................................................................51
SPI/I
2
C串行端口操作...................................................................... 51
I
2
C总线特性 ............................................................................ 51
I
数据传输过程......................................................................... 52
数据传输格式......................................................................... 53
2
C串行端口时序 ................................................................... 53
I
SPI串行端口操作...................................................................... 54
引脚描述.................................................................................. 54
SPI工作模式............................................................................ 54
通信周期—指令加数据........................................................ 54
写操作 ...................................................................................... 54
读操作 ...................................................................................... 54
修订历史
2008年9月—修订版0:初始版
SPI指令字(16位) .................................................................. 55
SPI MSB/LSB优先传输........................................................ 55
EEPROM操作 ............................................................................ 58
写入EEPROM ....................................................................... 58
读取EEPROM ....................................................................... 58
EEPROM缓冲段编程.......................................................... 59
寄存器段定义组................................................................... 59
IO_UPDATE(操作代码0x80) ............................................ 59
End-of-Data(操作代码0xFF).............................................. 59
Pseudo-End-of-Data(操作代码0xFE) ............................... 59
热性能 ......................................................................................... 61
寄存器映射................................................................................. 62
寄存器映射描述........................................................................ 67
应用信息..................................................................................... 82
使用AD9520进行频率规划 ............................................... 82
在ADC时钟应用中使用AD9520输出.............................. 82
LVPECL时钟分配 ................................................................ 82
CMOS时钟分配.................................................................... 83
外形尺寸..................................................................................... 84
订购指南................................................................................ 84
Rev. 0 | Page 3 of 84
AD9520-0
技术规格
除非另有说明,典型值的测量条件为:VS = VS_DRV = 3.3 V ± 5%;VS ≤ VCP ≤ 5.25 V;TA = 25°C;RSET = 4.12 kΩ;
CPRSET = 5.1 kΩ。最小值和最大值的测量条件为整个VS和TA(−40°C至+85°C)范围内。
电源要求
表1
最小值 典型值 最大值 单位单位测试条件/注释
VS 3.135 3.3 3.465 V 3.3 V ± 5%
VS_DRV 2.375 VS V 标称值为2.5 V至3.3 V ± 5%
VCP VS 5.25 V 标称值为3.3 V至5.0 V ± 5%
RSET引脚电阻 4.12 kΩ 设置内部偏置电流;接地
CPRSET引脚电阻 5.1 kΩ
BYPASS引脚电容 220 nF 内部LDO调节器的旁路电容;LDO稳定工作所必需的;接地
PLL特性
表2
最小值 典型值 最大值参数
VCO(片内)
频率范围
VCO增益(K
调谐电压(V
VCO
)
)
T
推频(开环)
1 kHz偏移时的相位噪声
100 kHz偏移时的相位噪声
1 MHz偏移时的相位噪声
参考输入
差模(REFIN、REFIN)
输入频率 0 250 MHz
输入灵敏度 280 mV p-p
REFIN自偏置电压 1.34 1.60 1.75 V REFIN的自偏置电压
REFIN自偏置电压
REFIN输入电阻 4.0 4.8 5.9 kΩ 自偏置
REFIN输入电阻
双路单端模式(REF1、REF2) 两路单端CMOS兼容型输入
输入频率(交流耦合,直流偏移关闭)
2530 2950 MHz 见图13
52 MHz/V 见图8
1 MHz/V
−51 dBc/Hz f = 2550 MHz
−108 dBc/Hz f = 2550 MHz
−127 dBc/Hz f = 2550 MHz
1.30 1.50 1.60 V
10 250 MHz 压摆率必须大于50 V/μs
设置内部电荷泵电流范围,标称值4.8 mA (CP_lsb = 600 μA);实际
电流计算如下:CP_lsb = 3.06/CPRSET;接地
测试条件/注释
VCP −
V 使用内部VCO时,VCP ≤ VS
0.5
差分模式(让未驱动的输入交流接地,可以
支持单端输入)
低于约1 MHz的频率应直流耦合;注意匹配
V
(自偏置电压)
CM
1
1
REFIN的自偏置电压
1
1
4.4 5.3 6.4 kΩ 自偏置
输入频率(交流耦合,直流偏移开启)
250 MHz
压摆率必须大于50 V/μs,并且必须满足输
入幅度灵敏度要求;见输入灵敏度
输入频率(直流耦合) 0 250 MHz 压摆率大于50 V/μs;CMOS电平
输入灵敏度(交流耦合,直流偏移关闭)
输入灵敏度(交流耦合,直流偏移开启)
0.55 3.28 V p-p V
1.5 2.78 V p-p V
不应超过V
IH
不应超过V
IH
S
S
输入逻辑高电平,直流偏移关闭 2.0 V
输入逻辑低电平,直流偏移关闭 0.8 V
输入电流 −100 +100 µA
输入电容 2 pF
Rev. 0 | Page 4 of 84
各引脚,REFIN (REF1)/REFIN (REF2)
AD9520-0
参数
晶体振荡器
晶振频率范围 16.67 33.33 MHz
最大晶体动态电阻 30 Ω
鉴频鉴相器(PFD)
PFD输入频率 100 MHz 防反冲脉冲宽度 = 1.3 ns、2.9 ns
45 MHz 防反冲脉冲宽度 = 6.0 ns
参考输入时钟倍频器频率 0.004 50 MHz 防反冲脉冲宽度 = 1.3 ns、2.9 ns
防反冲脉冲宽度 1.3 ns 0x017[1:0] = 01b
2.9 ns 0x017[1:0] = 00b; 0x017[1:0] = 11b
6.0 ns 0x017[1:0] = 10b
电荷泵(CP)
ICP吸/源电流 可编程
高值 4.8 mA
最小值 典型值 最大值 单位 测试条件/注释
CPRSET = 5.1 kΩ时;更改CPRSET可以获得更高的I
CP
低值 0.60 mA
CPRSET = 5.1 kΩ时;更改CPRSET可以获得更低的I
绝对精度 2.5 % 电荷泵电压设置为VCP/2
CPRSET范围 2.7 10 kΩ
ICP高阻抗模式漏电流 1 nA
吸电流与源电流匹配 1 %
0.5 V < VCP< VCP − 0.5 V;VCP为CP(电荷泵)引脚
上的电压;VCP为VCP电源引脚上的电压
I
CP与VCP
ICP与温度 2 %
1.5 %
0.5 V < V
V
= VCP/2 V
CP
< VCP − 0.5 V
CP
预分频器(N分频器的一部分)
预分频器输入频率
P = 1 FD 300 MHz
P = 2 FD 600 MHz
P = 3 FD 900 MHz
P = 2 DM (2/3) 600 MHz
P = 4 DM (4/5) 1000 MHz
P = 8 DM (8/9) 2400 MHz
P = 16 DM (16/17) 3000 MHz
P = 32 DM (32/33) 3000 MHz
预分频器输出频率 300 MHz
PLL N分频器延迟
A、B计数器输入频率(预分频器输入频率除以P)
寄存器0x019[2:0];见表53
000 O
001 410 ps
010 530 ps
011 650 ps
100 770 ps
101 890 ps
110 1010 ps
111 1130 ps
PLL R分频器延迟
寄存器0x019[5:3];见表53
000 O
001 370 ps
010 490 ps
011 610 ps
100 730 ps
101 850 ps
110 970 ps
111 1090 ps
CP
Rev. 0 | Page 5 of 84
AD9520-0
参数
零延迟模式下的相位偏移
内部零延迟模式下的相位偏移
(REF至LVPECL时钟输出引脚)
内部零延迟模式下的相位偏移
(REF至LVPECL时钟输出引脚)
外部零延迟模式下的相位偏移
(REF至CLK输入引脚)
外部零延迟模式下的相位偏移
(REF至CLK输入引脚)
噪声特性
电荷泵/鉴频鉴相器的带内相位噪声
(带内指在PLL的LBW内)
@ 500 kHz PFD频率 −165 dBc/Hz
@ 1 MHz PFD频率 −162 dBc/Hz
@ 10 MHz PFD频率 −152 dBc/Hz
@ 50 MHz PFD频率 −144 dBc/Hz
PLL品质因数(FOM) −222 dBc/Hz
PLL数字锁定检测窗口
2
锁定阈值(边沿重合)
低范围(ABP 1.3 ns、2.9 ns) 3.5 ns 0x017[1:0] = 00b, 01b,11b; 0x018[4] = 1b
高范围(ABP 1.3 ns、2.9 ns) 7.5 ns 0x017[1:0] = 00b, 01b, 11b; 0x018[4] = 0b
高范围(ABP 6.0 ns) 3.5 ns 0x017[1:0] = 10b; 0x018[4] = 0b
解锁阈值(迟滞)
2
低范围(ABP 1.3 ns、2.9 ns) 7 ns 0x017[1:0] = 00b, 01b, 11b; 0x018[4] = 1b
高范围(ABP 1.3 ns、2.9 ns) 15 ns 0x017[1:0] = 00b, 01b, 11b; 0x018[4] = 0b
高范围(ABP 6.0 ns) 11 ns 0x017[1:0] = 10b; 0x018[4] = 0b
1
REFIN和REFIN自偏置点略微偏移,以免在开路输入条件下发生震颤。
2
为使数字锁定检测可靠地工作,PFD频率的周期必须大于锁定后解锁的时间。
最小值 典型值 最大值 单位 测试条件/注释
REF指REFIN (REF1)/REFIN (REF2)
560 1060 1310 ps 旁路N延迟和R延迟时
−320 +50 +240 ps N延迟设置为110且旁路R延迟时
140 630 870 ps 旁路N延迟和R延迟时
−460 −20 +200 ps N延迟设置为011且旁路R延迟时
PLL带内相位噪底的估算方法如下:
测量VCO输出端的带内相位噪声,
然后减去20 log(N)(其中N为N分频器的值)
参考压摆率大于0.5 V/ns;FOM + 10 log(fPFD)为PLL
环路带宽内PFD/CP带内相位噪声(平坦区域中)的
近似值;闭环工作时,VCO输出端测得的相位噪声
提高20 log(N);PLL品质因数随着压摆率降低而降低;
见图12
通过适当的寄存器设置选择时,信号可在LD、STATUS
和REFMON引脚上提供;锁定检测窗口设置可通过更
改CPRSET电阻而改变
由0x017[1:0]和0x018[4]选择
(这是从解锁到锁定的阈值)
由0x017[1:0]和0x018[4]选择
(这是从锁定到解锁的阈值)
Rev. 0 | Page 6 of 84
时钟输入
表3
参数
时钟输入(CLK、CLK)
输入频率 0
0
最小值 典型值 最大值
测试条件/注释
差分输入
1
2.4 GHz 高频分配(VCO分频器)
1
1.6 GHz
仅分配(旁路VCO分频器);这是通道分频器支持的频率范围
AD9520-0
差分输入灵敏度 150 mV p-p
差分输入电平 2 V p-p
输入共模电压V
输入共模范围V
CM
CMR
1.3 1.57 1.8 V 自偏置;支持交流耦合
1.3 1.8 V
单端输入灵敏度 150 mV p-p
在2.4 GHz下测得;压摆率大于1 V/ns时可改善抖动性能
较大的电压摆幅可启动保护二极管,降低抖动性能
施加200 mV p-p信号;直流耦合
CLK交流耦合;CLK交流旁路至RF地
输入电阻 3.9 4.7 5.7 kΩ 自偏置
输入电容 2 pF
1
低于约1 MHz时,输入应直流耦合。应注意匹配VCM。
时钟输出
表4
参数
最小值 典型值 最大值单位单位
LVPECL时钟输出 终端 = 50 Ω接VS_DRV − 2 V
OUT0, OUT1, OUT2, OUT3, OUT4,
OUT5, OUT6, OUT7, OUT8,
OUT9, OUT10, OUT11
最大输出频率 2400 MHz
测试条件/注释
差分(OUT、OUT)
使用直接至输出;见图21(可以提供更高
的频率,但幅度无法满足V
输出频率受限于VCO最大频率或CLK输入
频率,取决于AD9520的配置
要求);最大
OD
输出高电压V
输出低电压V
OH
OL
输出差分电压V
VS_DRV −
1.07
VS_DRV −
1.95
OD
660 820 950 mV
VS_DRV −
0.96
VS_DRV −
1.79
VS_DRV −
0.84
VS_DRV −
1.64
V
V
CMOS时钟输出
OUT0A, OUT0B, OUT1A, OUT1B,
单端;终端 = 10 pF
OUT2A, OUT2B, OUT3A, OUT3B,
OUT4A, OUT4B, OUT5A, OUT5B,
OUT6A, OUT6B, OUT7A, OUT7B,
OUT8A, OUT8B, OUT9A, OUT9B,
OUT10A, OUT10B, OUT11A,
OUT11B
输出频率 250 MHz 见图22
输出高电压V
输出低电压V
输出高电压V
输出低电压V
输出高电压V
输出低电压V
OH
OL
OH
OL
OH
OL
VS − 0.1 V @ 1 mA load, VS_DRV = 3.3 V/2.5 V
0.1 V @ 1 mA load, VS_DRV = 3.3 V/2.5 V
2.7 V @ 10 mA load, VS_DRV = 3.3 V
0.5 V @ 10 mA load, VS_DRV = 3.3 V
1.8 V @ 10 mA load, VS_DRV = 2.5 V
0.6 V @ 10 mA load, VS_DRV = 2.5 V
Rev. 0 | Page 7 of 84
AD9520-0
时序特性
表5
参数 最小值 典型值 最大值 单位 测试条件/注释
LVPECL输出上升/下降时间 终端 = 50 Ω接VS_DRV − 2 V
输出上升时间tRP 130 170 ps
20%至80%,差分测量(上升/下降时间独立于
VS,在VS_DRV = 3.3 V和2.5 V下有效)
输出下降时间tFP 130 170 ps
80%至20%,差分测量(上升/下降时间独立于
VS,在VS_DRV = 3.3 V和2.5 V下有效)
传播延迟t
针对所有分频值
,CLK至LVPECL输出
PECL
850 1050 1280 ps 高频时钟分配配置
800 970 1180 ps 时钟分配配置
随温度的变化
输出偏斜,LVPECL输出
1
1.0 ps/°C
终端 = 50 Ω接VS_DRV − 2 V
共享同一分频器的LVPECL输出 5 16 ps VS_DRV = 3.3 V
5 20 ps VS_DRV = 2.5 V
不同分频器上的LVPECL输出 5 45 ps VS_DRV = 3.3 V
5 60 ps VS_DRV = 2.5 V
跨多个器件的所有LVPECL输出 190 ps VS_DRV = 3.3 V和2.5 V
CMOS输出上升/下降时间 终端 = 开路
输出上升时间t
输出下降时间t
输出上升时间t
输出下降时间t
传播延迟t
CMOS
针对所有分频值
RC
FC
RC
FC
,CLK至CMOS输出
750 960 ps 20% 至 80%; C
715 890 ps 80% 至 20%; C
965 1280 ps 20% 至 80%; C
890 1100 ps 80% 至 20%; C
时钟分配配置
2.1 2.75 3.55 ns VS_DRV = 3.3 V
= 10 pF; VS_DRV = 3.3 V
LOAD
= 10 pF; VS_DRV = 3.3 V
LOAD
= 10 pF; VS_DRV = 2.5 V
LOAD
= 10 pF; VS_DRV = 2.5 V
LOAD
3.35 ns VS_DRV = 2.5 V
随温度的变化
输出偏斜,CMOS输出
1
共享同一分频器的CMOS输出
2 ps/°C VS_DRV = 3.3 V和2.5 V
7 85 ps VS_DRV = 3.3 V
10 105 ps VS_DRV = 2.5 V
不同分频器上的所有CMOS输出 10 240 ps VS_DRV = 3.3 V
10 285 ps VS_DRV = 2.5 V
跨多个器件的所有CMOS输出 600 ps VS_DRV = 3.3 V
620 ps VS_DRV = 2.5 V
输出偏斜,LVPECL至CMOS输出
1
所有设置相同;逻辑类型不同
共享同一分频器的输出 1.18 1.76 2.48 ns 同一器件上的LVPECL至CMOS
不同分频器上的输出 1.20 1.78 2.50 ns 同一器件上的LVPECL至CMOS
1
输出偏斜是指在相同的电压、温度条件下,任何两条相似的延迟路径之间的差异。
Rev. 0 | Page 8 of 84
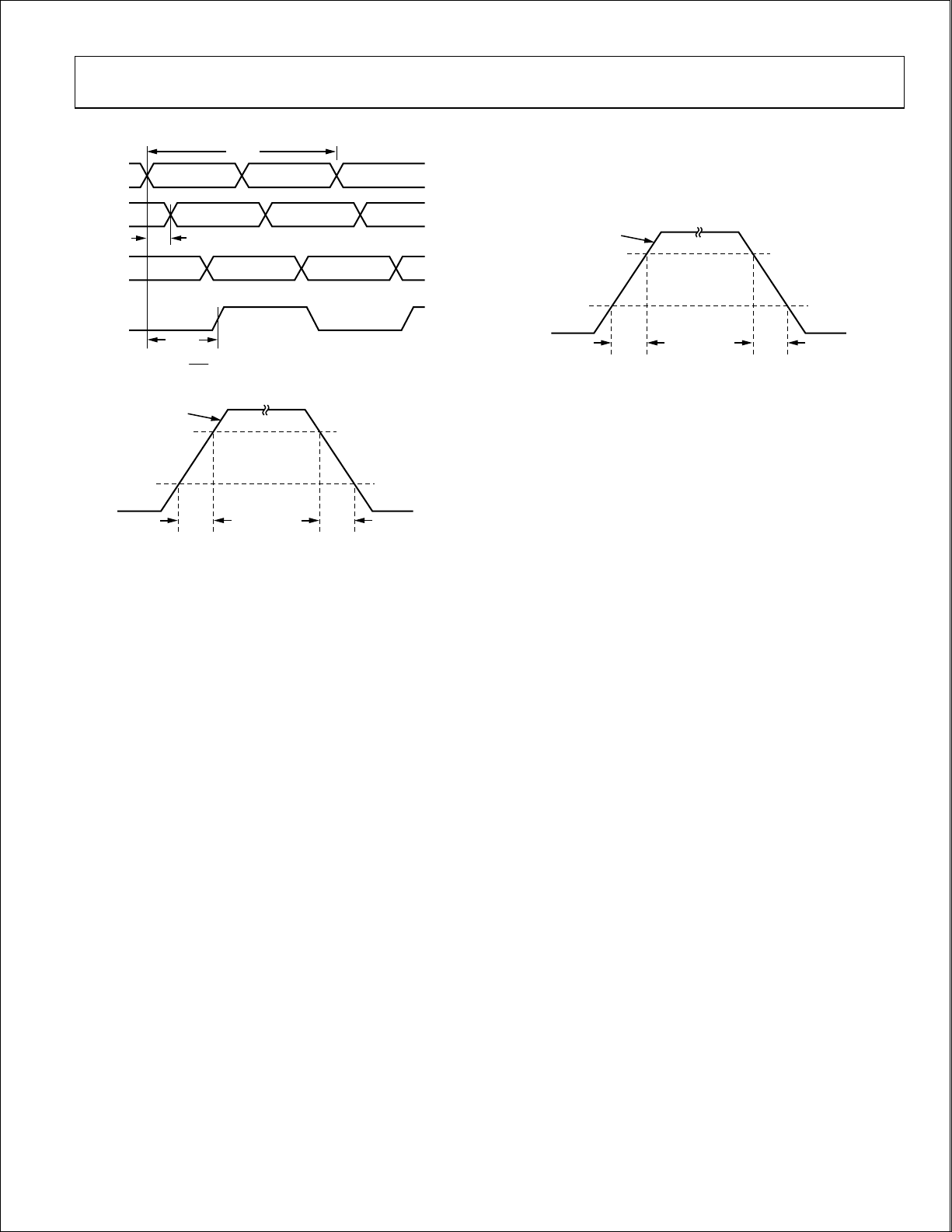
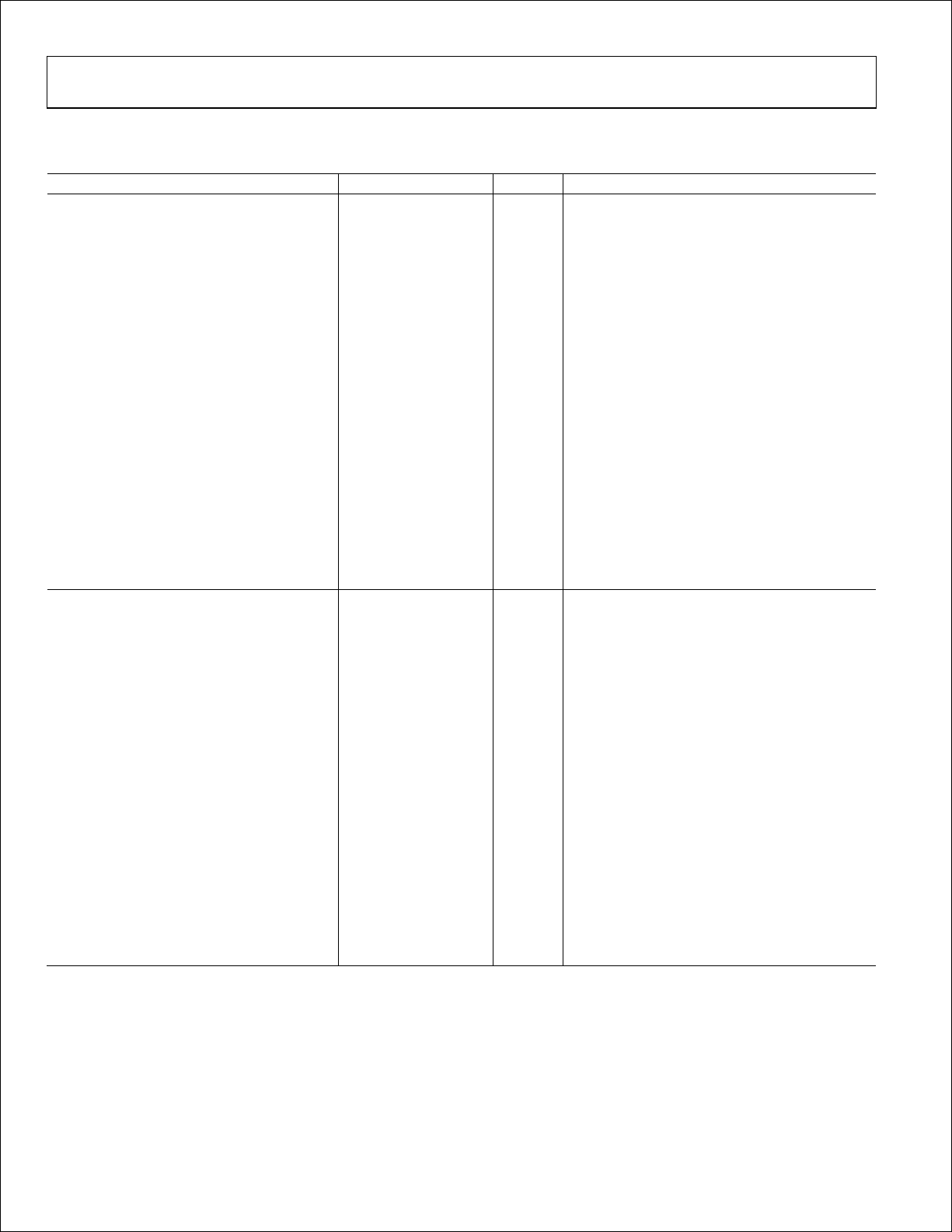
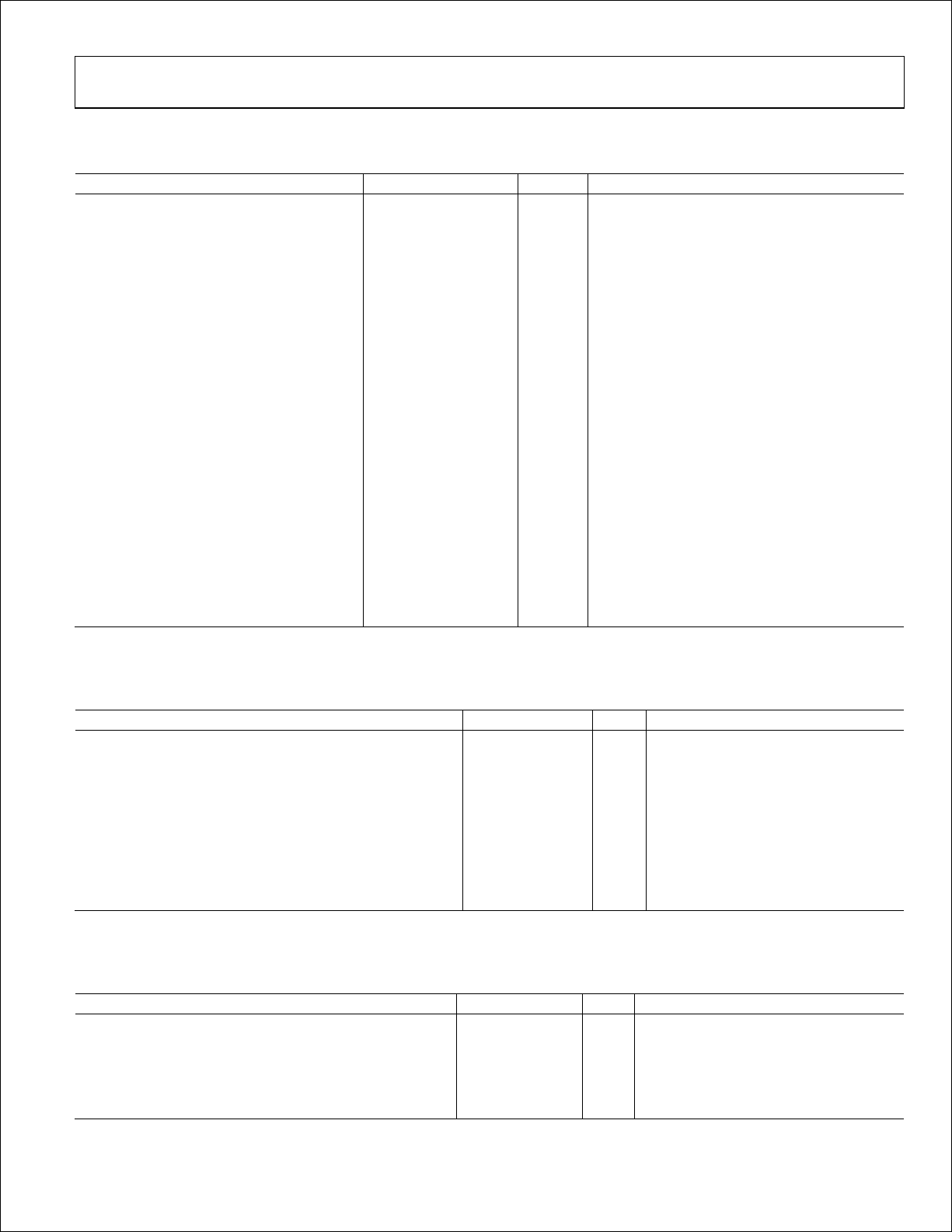
时序图
CLK
AD9520-0
t
CLK
SINGLE-ENDED
80%
20%
t
CMOS
10pF LOAD
RC
t
FC
07213-063
t
CMOS
t
PECL
07213-060
图2. CLK/CLK至时钟输出时序,分频比 = 1
图4. CMOS时序,单端,10 pF负载
DIFFERENTIAL
80%
20%
LVPECL
t
RP
t
FP
07213-061
图3. LVPECL时序,差分
Rev. 0 | Page 9 of 84
AD9520-0
时钟输出加性相位噪声(仅分配;未使用VCO分频器)
表6 .
参数
CLK至LVPECL加性相位噪声
CLK = 1 GHz,输出 = 1 GHz
分频比 = 1
@ 10 Hz偏移
@ 100 Hz偏移
@ 1 kHz偏移
@ 10 kHz偏移
@ 100 kHz偏移
@ 1 MHz偏移
@ 10 MHz偏移
@ 100 MHz偏移
CLK = 1 GHz,输出 = 200 MHz
分频比 = 5
@ 10 Hz偏移
@ 100 Hz偏移
@ 1 kHz偏移
@ 10 kHz偏移
@ 100 kHz偏移
@ 1 MHz偏移
>10 MHz偏移
CLK至CMOS加性相位噪声
CLK = 1 GHz,输出 = 250 MHz
分频比 = 4
@ 10 Hz偏移
@ 100 Hz偏移
@ 1 kHz偏移
@ 10 kHz偏移
@ 100 kHz偏移
@ 1 MHz偏移
>10 MHz偏移
CLK = 1 GHz,输出 = 50 MHz
分频比 = 20
@ 10 Hz偏移
@ 100 Hz偏移
@ 1 kHz偏移
@ 10 kHz偏移
@ 100 kHz偏移
@ 1 MHz偏移
>10 MHz偏移
最小值 典型值
−107 dBc/Hz
−117 dBc/Hz
−127 dBc/Hz
−135 dBc/Hz
−142 dBc/Hz
−145 dBc/Hz
−147 dBc/Hz
−150 dBc/Hz
−122 dBc/Hz
−132 dBc/Hz
−143 dBc/Hz
−150 dBc/Hz
−156 dBc/Hz
−157 dBc/Hz
−157 dBc/Hz
−107 dBc/Hz
−119 dBc/Hz
−125 dBc/Hz
−134 dBc/Hz
−144 dBc/Hz
−148 dBc/Hz
−154 dBc/Hz
−126 dBc/Hz
−133 dBc/Hz
−140 dBc/Hz
−148 dBc/Hz
−157 dBc/Hz
−160 dBc/Hz
−163 dBc/Hz
最大值 单位 测试条件/注释
仅分配部分;不包括PLL和VCO
输入压摆率 > 1 V/ns
输入压摆率 > 1 V/ns
仅分配部分;不包括PLL和VCO
输入压摆率 > 1 V/ns
输入压摆率 > 1 V/ns
Rev. 0 | Page 10 of 84
时钟输出绝对相位噪声(使用内部VCO)
表7
参数 最小值 典型值 最大值 单位 测试条件/注释
LVPECL绝对相位噪声
VCO = 2.95 GHz;输出 = 2.95 GHz
@ 1 kHz偏移
@ 10 kHz偏移
@ 100 kHz偏移
@ 1 MHz偏移
@ 10 MHz偏移
@ 40 MHz偏移
VCO = 2.75 GHz;输出 = 2.75 GHz
@ 1 kHz偏移
@ 10 kHz偏移
@ 100 kHz偏移
@ 1 MHz偏移
@ 10 MHz偏移
@ 40 MHz偏移
VCO = 2.55 GHz;输出 = 2.55 GHz
@ 1 kHz偏移
@ 10 kHz偏移
@ 100 kHz偏移
@ 1 MHz偏移
@ 10 MHz偏移
@ 40 MHz偏移
−46 dBc/Hz
−78 dBc/Hz
−104 dBc/Hz
−123 dBc/Hz
−139 dBc/Hz
−145 dBc/Hz
−49 dBc/Hz
−80 dBc/Hz
−106 dBc/Hz
−125 dBc/Hz
−140 dBc/Hz
−146 dBc/Hz
−51 dBc/Hz
−82 dBc/Hz
−108 dBc/Hz
−127 dBc/Hz
−140 dBc/Hz
−146 dBc/Hz
内部VCO;直接至LVPECL输出,
环路带宽小于1 kHz
AD9520-0
时钟输出绝对时间抖动(使用内部VCO的时钟产生)
表8
参数
LVPECL输出绝对时间抖动
VCO = 2.949 GHz; LVPECL = 245.76 MHz; PLL LBW = 63 kHz 176 fs rms
351 fs rms
VCO = 2.703 GHz; LVPECL = 122.88 MHz; PLL LBW = 63 kHz 158 fs rms
324 fs rms
VCO = 2.703 GHz; LVPECL = 61.44 MHz; PLL LBW = 63 kHz 177 fs rms
330 fs rms
最小值 典型值 最大值
时钟输出绝对时间抖动(使用内部VCO的时钟净化)
表9
参数
LVPECL输出绝对时间抖动
VCO = 2.799 GHz; LVPECL = 155.52 MHz; PLL LBW = 1.8 kHz 652 fs rms
VCO = 2.703 GHz; LVPECL = 122.88 MHz; PLL LBW = 2.1 kHz 607 fs rms
最小值 典型值 最大值
单位 测试条件/注释
应用示例基于典型设置,参考源干净,
因此使用较宽的PLL环路带宽;
参考 = 15.36 MHz;R DIV = 1
积分带宽 = 200 kHz至10 MHz
积分带宽 = 12 kHz至20 MHz
积分带宽 = 200 kHz至10 MHz
积分带宽 = 12 kHz至20 MHz
积分带宽 = 200 kHz至10 MHz
积分带宽 = 12 kHz至20 MHz
单位 测试条件/注释
应用示例基于典型设置,参考源抖动,
因此使用较窄的PLL环路带宽;
参考 = 19.44 MHz;R DIV = 162
积分带宽 = 12 kHz至20 MHz
积分带宽 = 12 kHz至20 MHz
Rev. 0 | Page 11 of 84
AD9520-0
时钟输出绝对时间抖动(使用外部VCXO的时钟产生)
表 10.
参数
LVPECL输出绝对时间抖动
LVPECL = 245.76 MHz; PLL LBW = 125 Hz 54 fs rms
77 fs rms
109 fs rms
LVPECL = 122.88 MHz; PLL LBW = 125 Hz 79 fs rms
114 fs rms
163 fs rms
LVPECL = 61.44 MHz; PLL LBW = 125 Hz 124 fs rms
176 fs rms
259 fs rms
时钟输出加性时间抖动(未使用VCO分频器)
表11 .
参数 最小值 典型值 最大值 单位 测试条件/注释
LVPECL输出加性时间抖动
CLK = 622.08 MHz
任意LVPECL输出 = 622.08 MHz
分频比 = 1
CLK = 622.08 MHz
任意LVPECL输出 = 155.52 MHz
分频比 = 4
CLK = 1000 MHz
任意LVPECL输出 = 100 MHz
分频比 = 10
CLK = 500 MHz
任意LVPECL输出 = 100 MHz
分频比 = 5
CMOS输出加性时间抖动
CLK = 200 MHz
任意CMOS输出对 = 100 MHz
分频比 = 2
最小值 典型值 最大值
46 fs rms
64 fs rms
223 fs rms
209 fs rms
325 fs rms
单位 测试条件/注释
应用示例基于使用外部245.76 MHz VCXO
(Toyocom TCO-2112)的典型设置;
参考 = 15.36 MHz;R DIV = 1
积分带宽 = 200 kHz至5 MHz
积分带宽 = 200 kHz至10 MHz
积分带宽 = 12 kHz至20 MHz
积分带宽 = 200 kHz至5 MHz
积分带宽 = 200 kHz至10 MHz
积分带宽 = 12 kHz至20 MHz
积分带宽 = 200 kHz至5 MHz
积分带宽 = 200 kHz至10 MHz
积分带宽 = 12 kHz至20 MHz
仅分配部分;不包括PLL和VCO;
在时钟信号的上升沿测量
积分带宽 = 12 kHz至20 MHz
积分带宽 = 12 kHz至20 MHz
根据ADC的信噪比方法计算
宽带抖动
根据ADC的信噪比方法计算
宽带抖动
仅分配部分;不包括PLL和VCO
根据ADC的信噪比方法计算
宽带抖动
Rev. 0 | Page 12 of 84
时钟输出加性时间抖动(使用VCO分频器)
表12
参数
最小值 典型值 最大值
LVPECL输出加性时间抖动
CLK = 1.0 GHz;VCO DIV = 5;LVPECL = 100 MHz;
230 fs rms
通道分频比 = 2;占空比校正 = 关
CLK = 500 MHz;VCO DIV = 5;LVPECL = 100 MHz;
215 fs rms
旁路通道分频器;占空比校正 = 开
CMOS输出加性时间抖动
CLK = 200 MHz;VCO DIV = 2;CMOS = 100 MHz;
326 fs rms
旁路通道分频器;占空比校正 = 关
CLK = 1600 MHz;VCO DIV = 2;CMOS = 100 MHz;
362 fs rms
通道分频比 = 8;占空比校正 = 关
串行控制端口—SPI模式
表13
参数
CS (输入)
最小值 典型值 最大值
输入逻辑1电压 2.0 V
输入逻辑0电压 0.8 V
输入逻辑1电流 3 µA
输入逻辑0电流 −110 µA
单位 测试条件/注释
AD9520-0
单位 测试条件/注释
仅分配部分;不包括PLL和VCO;
使用时钟信号的上升沿
根据ADC的信噪比方法计算(宽带抖动)
根据ADC的信噪比方法计算(宽带抖动)
仅分配部分;不包括PLL和VCO;
使用时钟信号的上升沿
根据ADC的信噪比方法计算(宽带抖动)
根据ADC的信噪比方法计算(宽带抖动)
CS 内置一个30 kΩ上拉电阻
负值表示内部上拉电阻导致电流流出AD9520
输入电容 2 pF
SCLK(输入),SPI模式
输入逻辑1电压 2.0 V
输入逻辑0电压 0.8 V
输入逻辑1电流 110 µA
输入逻辑0电流 1 µA
输入电容 2 pF
SDIO(输入处于双向模式)
输入逻辑1电压 2.0 V
输入逻辑0电压 0.8 V
输入逻辑1电流 1 µA
输入逻辑0电流 1 µA
输入电容 2 pF
SDIO、SDO(输出)
输出逻辑1电压 2.7 V
输出逻辑0电压 0.4 V
时序
时钟速率(SCLK, 1/t
高电平脉冲宽度,t
低电平脉冲宽度,t
SCLK
)
HIGH
LOW
25 MHz
16 ns
16 ns
SDIO至SCLK建立时间,tDS 4 ns
SCLK至SDIO保持时间,t
DH
0 ns
SCLK至有效SDIO和SDO时间,tDV 11 ns
CS 至SCLK建立和保持时间,tS、t
CS 最短脉冲宽度(高电平),t
PWH
C
2 ns
3 ns
SPI模式下SCLK内置一个30 kΩ下拉电阻,
2
C模式下无内置电阻
I
Rev. 0 | Page 13 of 84
AD9520-0
串行控制端口—I2C模式
表14
参数 最小值 典型值 最大值 单位 测试条件/注释
SDA、SCL(输入数据时)
输入逻辑1电压 0.7 × VS V
输入逻辑0电压 0.3 × VS V
输入电流(输入电压介于0.1 × VS和0.9 × VS之间)
施密特触发器输入的迟滞 0.015 × VS V
输入滤波器必须抑制的尖峰的脉冲宽度,t
SPIKE
SDA(输出数据时)
输出逻辑0电压(3 mA吸电流) 0.4 V
从VIH
MIN
到VIL
的输出下降时间
MAX
(总线电容从10 pF到400 pF)
时序
时钟速率(SCL,f
停止条件与起始条件之间的总线空闲时间,t
重复起始条件的建立时间,t
)
I2C
IDLE
SET;STR
(重复)起始条件保持时间(此周期
结束后产生第一个时钟脉冲),t
停止条件建立时间,t
SET;STP
SCL时钟的低电平周期,t
SCL时钟的高电平周期,t
SCL、SDA上升时间,t
SCL、SDA下降时间,t
数据建立时间,t
数据保持时间,t
RISE
FALL
SET;DAT
HLD;DAT
HLD;STR
1.3 µs
LOW
0.6 µs
HIGH
−10 +10 µA
50 ns
20 + 0.1 C
250 ns Cb = 一条总线的电容(单位pF)
b
400 kHz
1.3 µs
0.6 µs
0.6 µs
0.6 µs
20 + 0.1 Cb 300 ns
20 + 0.1 Cb 300 ns
120 ns
140 880 ns
注意所有I2C时序值均参考
VIH
(0.3 × VS)和VIL
MIN
电平(0.7 × VS)
这与100 ns最小值的原始I²C
规范略有不同
这与0 ns最小值的原始I²C规范略有不同
MAX
1
各条总线的容性负载,C
1
根据原始I2C规范,I2C主机还必须提供最短300 ns的保持时间,以便SDA信号桥接SCL下降沿的未定义区域。
b
400 pF
Rev. 0 | Page 14 of 84
AD9520-0
PD, SYNC和RESET引脚
表15
参数 最小值 典型值 最大值 单位 测试条件/注释
输入特性 这些引脚各有一个30 kΩ内部上拉电阻
逻辑1电压 2.0 V
逻辑0电压 0.8 V
逻辑1电流 1 µA
逻辑0电流 −110 µA
电容 2 pF
复位时序
低电平脉冲宽度 50 ns
RESET 无活动到启动寄存器编程
SYNC 时序
低电平脉冲宽度 1.3 ns 高速时钟为CLK输入信号
串行端口设置引脚:SP1、SP0
100 ns
表16
参数 最小值 典型值 最大值 单位 测试条件/注释
SP1, SP0 这些引脚无内部上拉/下拉电阻
逻辑电平0 0.25 × VS V VS为VS引脚上的电压
逻辑电平½ 0.4 × VS 0.65 × VS V
逻辑电平1 0.8 × VS V
用户可以使这些引脚悬空以获得逻辑电平½;如果此引脚悬空,用
户应将一个电容接地
负值表示内部上拉电阻导致电流流出AD9520
LD、STATUS和REFMON引脚
表17
参数 最小值典型值 最大值 单位 测试条件/注释
输出特性
输出高电压V
输出低电压V
最大反转率 100 MHz
模拟锁定检测
电容 3 pF
REF1、REF2和VCO频率状态监控器
正常范围 1.02 MHz
扩展范围 8 kHz
LD引脚比较器
跳变点 1.6 V
迟滞 260 mV
OH
OL
2.7 V
0.4 V
用作数字输出(CMOS)时;在其它一些模式下,这些
引脚不是CMOS数字输出;见表53 0x017、0x01A和0x01B
适用于多路复用器设置为任意分频器或计数器输出,
或者设置为PFD升/降脉冲时;也适用于模拟锁定检测
模式;通常仅在调试模式下使用;注意:当任一引脚反
转时,杂散可能耦合到输出
片内电容;用于计算模拟锁定检测回读的RC时间常数;
使用一个上拉电阻
高于此频率时,监控器指示参考存在
高于此频率时,监控器指示参考存在
Rev. 0 | Page 15 of 84
AD9520-0
功耗
表18
参数 最小值 典型值 最大值 单位 测试条件/注释
芯片功耗
不包括外部电阻的功耗;所有LVPECL输出端接50 Ω至V
所有CMOS输出具有10 pF容性负载;VS_DRV = 3.3 V
上电默认 1.32 1.5 W 无时钟;无编程;默认寄存器值
PLL锁定;一路LVPECL输出使能 0.55 0.64 W
PLL锁定;一路CMOS输出使能 0.52 W
仅分配模式;VCO分频器开启;
0.39 W
一路LVPECL输出使能
仅分配模式;VCO分频器关闭;
0.36 W
一路LVPECL输出使能
全面运作时的最大功耗 1.5 1.7 W
= 25 MHz;f
f
REF
一路LVPECL输出和输出分频器使能;零延迟关闭;I
= 25 MHz;f
f
REF
一路CMOS输出和输出分频器使能;零延迟关闭;I
f
= 2.4 GHz;f
CLK
和输出分频器使能;零延迟关闭
= 2.4 GHz;f
f
CLK
和输出分频器使能;零延迟关闭
= 250 MHz;VCO = 2.75 GHz;VCO分频比 = 2;
OUT
= 62.5 MHz;VCO = 2.75 GHz;VCO分频比 = 2;
OUT
= 200 MHz;VCO分频比 = 2;一路LVPECL输出
OUT
= 200 MHz;旁路VCO分频器;一路LVPECL输出
OUT
PLL开启;内部VCO = 2750 MHz;VCO分频比 = 2;所有通道分频
器开启;12路LVPECL输出(125 MHz);零延迟开启
PD
关断
PD
关断,最大休眠功耗
60 80 mW
24 33 mW
PD
引脚拉低;不包括终端电阻的功耗
PD
引脚拉低;PLL关断,0x010[1:0] = 01b;关断SYNC;
0x230[2] = 1b;关断分配参考,0x230[1] = 1b
VCP电源 4 4.8 mW PLL工作;典型闭环配置
各功能引起的功耗变化 使能/禁用某个功能时的功耗变化
VCO分频器开/关 32 40 mW 不使用VCO分频器
REFIN(差分)关闭 25 30 mW
REF1、REF2(单端)开/关 15 20 mW
参考输入关闭与差分参考输入模式之间的变化
参考输入关闭与一路单端参考使能之间的变化;如果REF1和
REF2均上电,此数值应加倍
VCO开/关 67 104 mW 内部VCO禁用;选择CLK输入
PLL分频器和鉴相器开/关 51 63 mW PLL关闭至PLL开启,正常工作;无参考使能
LVPECL通道 121 144 mW
无LVPECL输出开启至一路LVPECL输出开启;通道分频比设为1
LVPECL驱动器 51 73 mW 同一通道的第二路LVPECL输出开启
CMOS通道 145 180 mW
无CMOS输出开启至一路CMOS输出开启;通道分频比设为1;
f
= 62.5 MHz、10 pF容性负载
OUT
CMOS驱动器开/关 11 24 mW 同一通道内的其它CMOS输出开启
通道分频器使能 40 57 mW
分频器旁路(1分频)与2分频至32分频之间的变化
零延迟模块开/关 30 34 mW
CP
− 2 V;
CC
= 4.8 mA
CP
= 4.8 mA
Rev. 0 | Page 16 of 84
绝对最大额定值
表19
参数或引脚 相对于 额定值
VS GND −0.3 V至+3.6 V
VCP, CP GND −0.3 V至+5.8 V
VS_DRV GND −0.3 V至+3.6 V
REFIN, REFIN
GND
RSET, LF, BYPASS GND −0.3 V至VS + 0.3 V
CPRSET GND −0.3 V至VS + 0.3 V
CLK, CLK
CLK
SCLK/SCL, SDIO/SDA, SDO, CS
OUT0, OUT0, OUT1, OUT1,
OUT2, OUT2
OUT4, OUT4
OUT6, OUT6
OUT8, OUT8
OUT10, OUT10
SYNC
, OUT3, OUT3,
, OUT5, OUT5,
, OUT7, OUT7,
, OUT9, OUT9,
RESET, PD
,
, OUT11, OUT11
GND
CLK
GND
GND
GND −0.3 V至VS + 0.3 V
REFMON, STATUS, LD GND −0.3 V至VS + 0.3 V
SP0, SP1, EEPROM GND −0.3 V至VS + 0.3 V
1
结温
存储温度范围
引脚温度(10秒)
1
θJA见表20。
150°C
−65°C至+150°C
300°C
−0.3 V至VS + 0.3 V
−0.3 V至VS + 0.3 V
−1.2 V至+1.2 V
−0.3 V至VS + 0.3 V
−0.3 V至VS + 0.3 V
AD9520-0
注意,超出上述绝对最大额定值可能会导致器件永久性
损坏。这只是额定最值,不表示在这些条件下或者在任
何其它超出本技术规范操作章节中所示规格的条件下,
器件能够正常工作。长期在绝对最大额定值条件下工作
会影响器件的可靠性。
热阻
热阻采用JEDEC 51-5 2S2P测试板在静止空气条件下根据
JEDEC JESD51-2进行测量。详情见“热性能”部分。
表20
封装类型 θJA 单位
64引脚LFCSP (CP-64-4) 22 °C/W
ESD警告
ESD(静电放电)敏感器件。
带电器件和电路板可能会在没有察觉的情况下放电。
尽管本产品具有专利或专有保护电路,但在遇到高
能量ESD时,器件可能会损坏。因此,应当采取适当
的ESD防范措施,以避免器件性能下降或功能丧失。
Rev. 0 | Page 17 of 84
AD9520-0
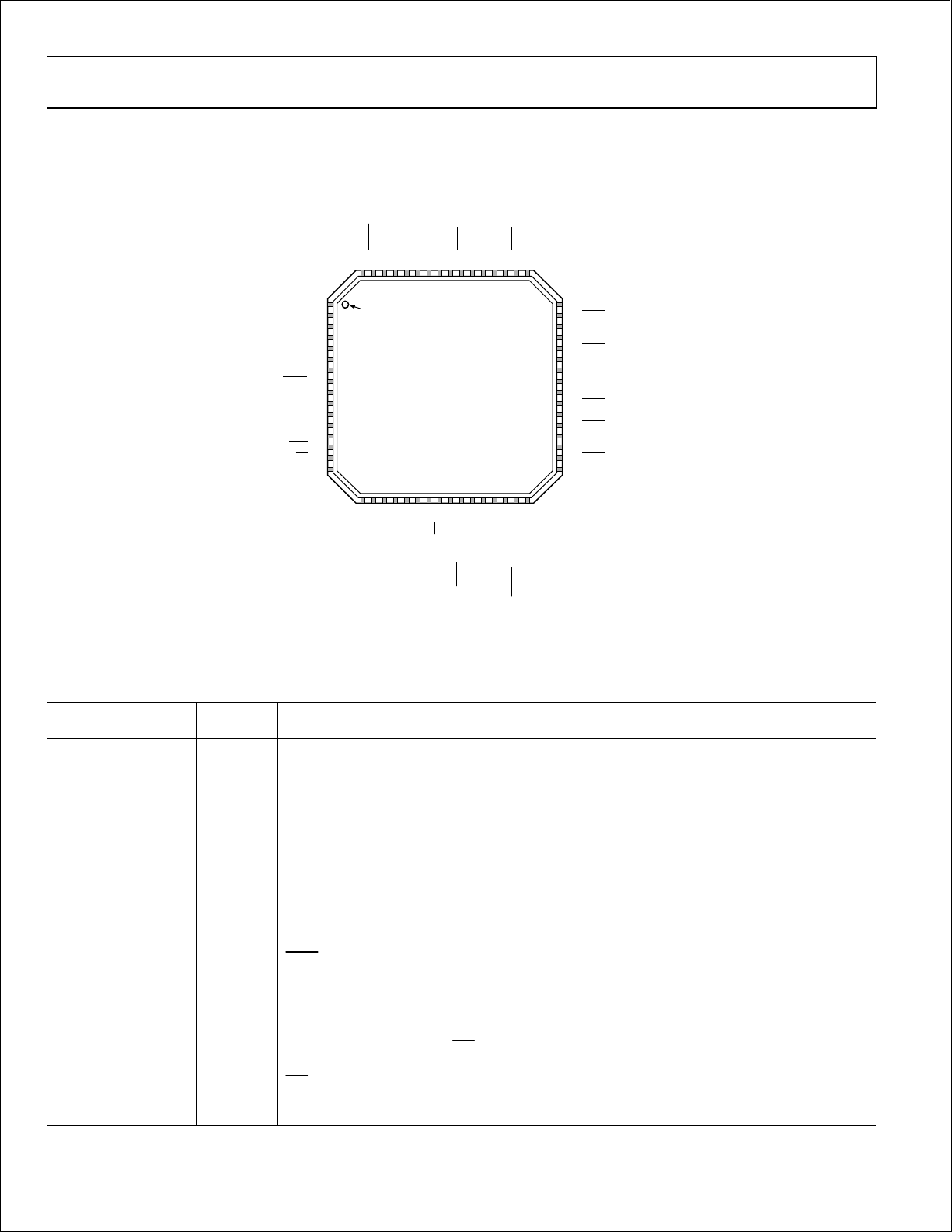
引脚配置和功能描述
REFIN (REF1)
REFIN (REF2)
CPRSETVSVS
GND
RSETVSOUT0 (OUT0A)
OUT0 (OUT0B)
VS_DRV
OUT1 (OUT1A)
OUT1 (OUT1B)
646362616059585756555453525150
OUT2 (OUT2A)
OUT2 (OUT2B)
VS
49
VS
1
PIN 1
REFMON
LD
VCP
CP
STATUS
REF_SEL
SYNC
LF
BYPASS
10
VS
11
VS
12
CLK
13
CLK
14
CS
15
SCLK/SCL
NOTES
1. EXPOSED DIE PAD MUST BE CONNECTED TO GND.
16
INDICATOR
2
3
4
5
6
7
8
9
171819202122232425262728293031
SDIO/SDA
SDO
GND
AD9520
TOP VIEW
(Not to Scale)
SP1
SP0
EEPROM
PD
RESET
VS_DRV
OUT10A)
T9 (OUT9A)
T9 (OUT9B)
OU
OU
OUT10 (
OUT10B)
OUT11A)
OUT11B)
OUT10 (
OUT11 (
OUT11 (
48
OUT3 (OUT3A)
47
OUT3 (OUT3B)
46
VS_DRV
45
O
UT4 (OUT4A)
44
OUT4 (OUT4B)
43
OUT5 (OUT5A)
42
OUT5 (OUT5B)
41
VS
40
VS
39
OUT8 (OUT8B)
38
OUT8 (OUT8A)
37
OUT7 (OUT7B)
36
OUT7 (OUT7A)
35
VS_DRV
34
OUT6 (OUT6B)
33
OUT6 (OUT6A)
32
VS
07213-003
图5. 引脚配置
表21. 引脚功能描述
输入/
引脚编号
1, 11, 12,32,
输出
I 电源 VS 3.3 V电源引脚。
引脚类型 引脚名称 描述
40, 41,49,
57, 60, 61
2 O 3.3 V CMOS REFMON 参考监控器(输出)。此引脚具有多个可选输出。
3 O 3.3 V CMOS LD
4 I 电源 VCP
锁定检测(输出)。此引脚具有多个可选输出。
电荷泵(CP)的电源;VS < VCP < 5.0 V。
如果不使用PLL,VCP仍须连接到3.3 V。
5 O CP
环路滤波器
电荷泵(输出)。此引脚连接到外部环路滤波器。
如果不使用PLL,此引脚可以不连接。
6 O 3.3 V CMOS STATUS
7 I 3.3 V CMOS REF_SEL
可编程状态输出。
参考选择。选择REF1(低电平)或REF2(高电平)。
此引脚内置一个30 kΩ下拉电阻。
8 I 3.3 V CMOS
SYNC
手动同步和手动保持。此引脚启动手动同步,并用于手动保持。
低电平有效。此引脚内置一个30 kΩ上拉电阻。
9 I
10 O BYPASS
13 I
环路滤波器
环路滤波器
差分时钟
LF
CLK
输入
14 I
差分时钟
此引脚与CLK一起构成时钟分配部分的差分输入。
CLK
输入
环路滤波器(输入)。内部连接到VCO控制电压节点。
此引脚用于通过一个220 nF电容将LDO旁路至地。
此引脚与CLK一起构成时钟分配部分的差分输入。
如果将单端输入连接到CLK引脚,应在该引脚与地之间连接一个0.1 μF旁路电容。
Rev. 0 | Page 18 of 84
输入/
引脚编号
输出
引脚类型 引脚名称 描述
15 I 3.3 V CMOS
AD9520-0
串行控制端口片选;低电平有效。此引脚内置一个30 kΩ上拉电阻。
CS
16 I 3.3 V CMOS SCLK/SCL
串行控制端口时钟信号。SPI模式下此引脚内置一个30 kΩ下拉电阻,
2
C模式下为高阻抗。
I
17 I/O 3.3 V CMOS SDIO/SDA 串行控制端口双向串行数据输入/输出。
18 O 3.3 V CMOS SDO 串行控制端口单向串行数据输出。
19, 59 I GND GND 接地引脚。
20 I
三电平逻辑
SP1
选择SPI或I
2
C作为串行接口端口,在I2C模式下选择I2C从机地址。三
电平逻辑。该引脚内部偏置到开路逻辑电平。
21 I
三电平逻辑
22 I 3.3 V CMOS EEPROM
SP0
选择SPI或I
电平逻辑。该引脚内部偏置到开路逻辑电平。
C作为串行接口端口,在I2C模式下选择I2C从机地址。三
2
设置此引脚为高电平,可选择在复位和/或上电时载入内部EEPROM
中存储的寄存器值。设置此引脚为低电平,则使AD9520在上电/复
位时载入硬编码的默认寄存器值。此引脚内置一个30 kΩ下拉电阻。
23 I 3.3 V CMOS
24 I 3.3 V CMOS
25 O
LVPECL 或
CMOS
26 O
LVPECL 或
CMOS
27, 35,
I 电源 VS_DRV
46, 54
28 O
LVPECL 或
CMOS
29 O
LVPECL 或
CMOS
30 O
LVPECL 或
CMOS
31 O
LVPECL 或
CMOS
33 O
LVPECL 或
CMOS
34 O
LVPECL 或
CMOS
36 O
LVPECL 或
CMOS
37 O
LVPECL 或
CMOS
38 O
LVPECL 或
CMOS
39 O
LVPECL 或
CMOS
42 O
LVPECL 或
CMOS
43 O
LVPECL 或
CMOS
44 O
LVPECL 或
CMOS
45 O
LVPECL 或
CMOS
47 O
LVPECL 或
CMOS
RESET
PD
OUT9 (OUT9A)
(OUT9B)
OUT9
OUT10
(OUT10A)
(OUT10B)
OUT10
OUT11
(OUT11A)
(OUT11B) 时钟输出。此引脚可以配置为差分LVPECL输出的一端,
OUT11
OUT6 (OUT6A)
(OUT6B) 时钟输出。此引脚可以配置为差分LVPECL输出的一端,
OUT6
OUT7 (OUT7A)
(OUT7B) 时钟输出。此引脚可以配置为差分LVPECL输出的一端,
OUT7
OUT8 (OUT8A)
(OUT8B) 时钟输出。此引脚可以配置为差分LVPECL输出的一端,
OUT8
(OUT5B) 时钟输出。此引脚可以配置为差分LVPECL输出的一端,
OUT5
OUT5 (OUT5A)
(OUT4B) 时钟输出。此引脚可以配置为差分LVPECL输出的一端,
OUT4
OUT4 (OUT4A)
(OUT3B) 时钟输出。此引脚可以配置为差分LVPECL输出的一端,
OUT3
芯片复位,低电平有效。此引脚内置一个30 kΩ上拉电阻。
芯片关断引脚,低电平有效。此引脚内置一个30 kΩ上拉电阻。
时钟输出。此引脚可以配置为差分LVPECL输出的一端,
或者配置为单端CMOS输出。
时钟输出。此引脚可以配置为差分LVPECL输出的一端,或
者配置为单端CMOS输出。
输出驱动器电源引脚。作为一组,这些引脚可以设置为2.5 V或3.3 V。
所有4个引脚必须设为相同的电压。
时钟输出。此引脚可以配置为差分LVPECL输出的一端,
或者配置为单端CMOS输出。
时钟输出。此引脚可以配置为差分LVPECL输出的一端,
或者配置为单端CMOS输出。
时钟输出。此引脚可以配置为差分LVPECL输出的一端,
或者配置为单端CMOS输出。
或者配置为单端CMOS输出。
时钟输出。此引脚可以配置为差分LVPECL输出的一端,
或者配置为单端CMOS输出。
或者配置为单端CMOS输出。
时钟输出。此引脚可以配置为差分LVPECL输出的一端,
或者配置为单端CMOS输出。
或者配置为单端CMOS输出。
时钟输出。此引脚可以配置为差分LVPECL输出的一端,
或者配置为单端CMOS输出。
或者配置为单端CMOS输出。
或者配置为单端CMOS输出。
时钟输出。此引脚可以配置为差分LVPECL输出的一端,
或者配置为单端CMOS输出。
或者配置为单端CMOS输出。
时钟输出。此引脚可以配置为差分LVPECL输出的一端,
或者配置为单端CMOS输出。
或者配置为单端CMOS输出。
Rev. 0 | Page 19 of 84
AD9520-0
输入/
引脚编号
48 O
50 O
51 O
52 O
53 O
55 O
56 O
58 O RSET
62 O
63 I
64 I
EPAD
输出
引脚类型 引脚名称 描述
LVPECL 或
CMOS
LVPECL 或
CMOS
LVPECL 或
CMOS
LVPECL 或
CMOS
LVPECL 或
CMOS
LVPECL 或
CMOS
LVPECL 或
CMOS
电流设置
电阻
电流设置
电阻
参考输入 REFIN
参考输入
GND GND
OUT3 (OUT3A)
OUT2
OUT2 (OUT2A)
OUT1
OUT1 (OUT1A)
OUT0
OUT0 (OUT0A)
CPRSET
REFIN (REF1)
时钟输出。此引脚可以配置为差分LVPECL输出的一端,
或者配置为单端CMOS输出。
(OUT2B) 时钟输出。此引脚可以配置为差分LVPECL输出的一端,
或者配置为单端CMOS输出。
时钟输出。此引脚可以配置为差分LVPECL输出的一端,
或者配置为单端CMOS输出。
(OUT1B) 时钟输出。此引脚可以配置为差分LVPECL输出的一端,
或者配置为单端CMOS输出。
时钟输出。此引脚可以配置为差分LVPECL输出的一端,
或者配置为单端CMOS输出。
(OUT0B) 时钟输出。此引脚可以配置为差分LVPECL输出的一端,
或者配置为单端CMOS输出。
时钟输出。此引脚可以配置为差分LVPECL输出的一端,
或者配置为单端CMOS输出。
时钟分配电流设置电阻。
应将一个4.12 kΩ电阻连接在此引脚与GND之间。
电荷泵电流设置电阻。应将一个5.1 kΩ电阻连接在此引脚与GND之间。
如果不使用PLL,则无需连接该电阻。
(REF2)
此引脚与REFIN一起构成PLL参考的差分输入。
此引脚还可以是REF1的单端输入。
此引脚与REFIN一起构成PLL参考的差分输入。
此引脚还可以是REF1的单端输入。
裸露焊盘必须连接到GND。
Rev. 0 | Page 20 of 84
–
典型工作特性
350
3 CHANNELS—6 LVPECL
AD9520-0
5
300
250
200
CURRENT (mA)
150
100
0 500 1000 1500 2000 2500 3000
3 CHANNELS—3 LVPECL
2 CHANNELS—2 LVPECL
1 CHANNEL—1 LVPECL
FREQUENCY (MHz)
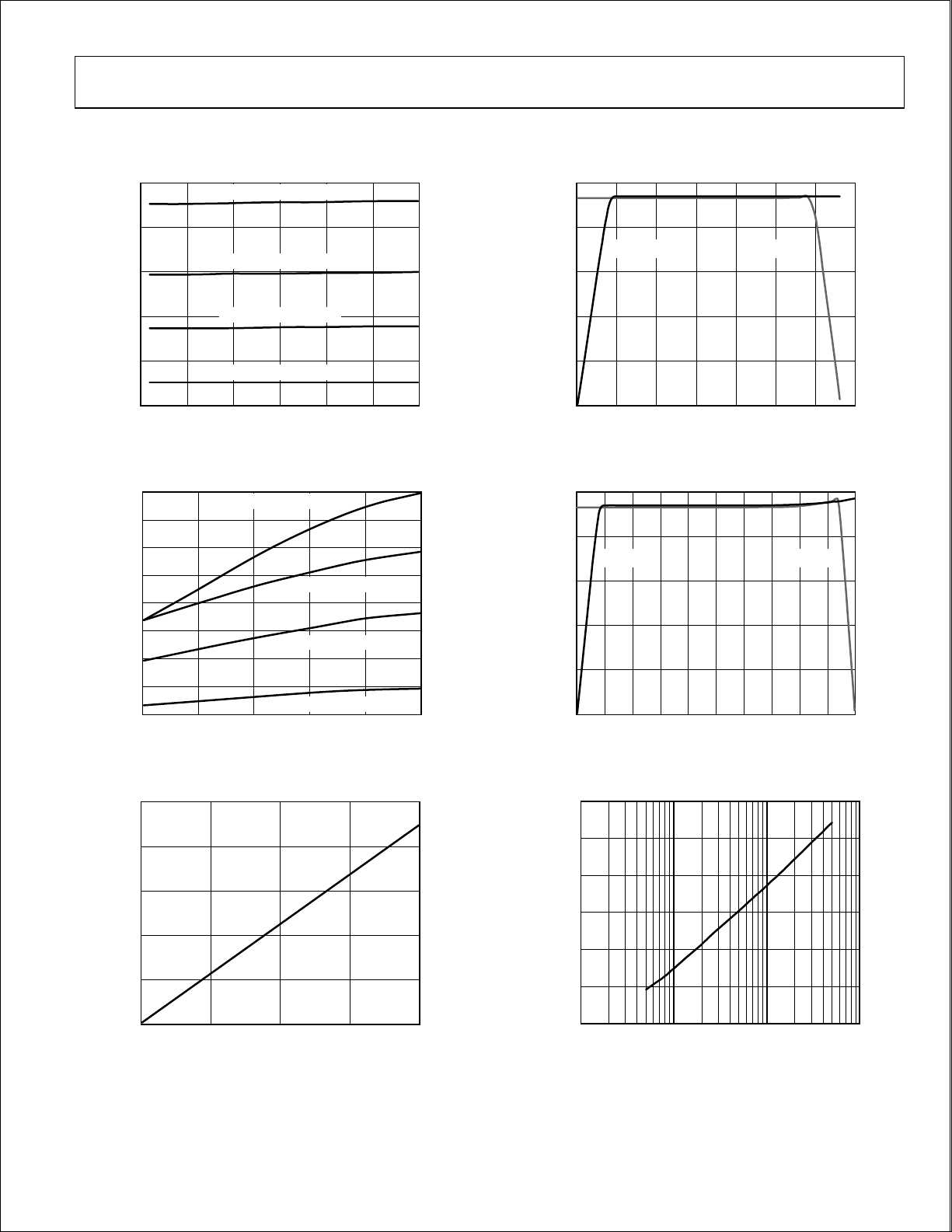
图6. 总电流与频率的关系,CLK至输出(PLL关闭),
LVPECL输出端接50 Ω至VS_DRV − 2 V
240
220
200
180
160
140
CURRENT (mA)
120
100
80
0 50 100 150 200 250
3 CHANNELS—6 CMOS
3 CHANNELS—3 CMOS
2 CHANNELS—2 CMOS
1 CHANNEL—1 CMOS
FREQUENCY (MHz)
图7. 总电流与频率的关系,CLK至输出
(PLL关闭),CMOS输出,10 pF负载
65
4
PUMP UPPUMP DOWN
3
2
CURRENT FROM CP PIN (mA)
1
0
07213-108
VOLTAGE ON CP PIN (V)
30 3.02.52.01.51.00.5
.5
07213-111
图9. 电荷泵特性(VCP = 3.3 V)
5
4
PUMP DOWN PUMP UP
3
2
CURRENT FROM CP PIN (mA)
1
0
07213-109
VOLTAGE ON CP PIN (V)
50 4.03.0 4.53.55.0 0.1 5.1 0.2 5.2
.0
07213-112
图10. 电荷泵特性(VCP = 5.0 V)
140
60
55
(MHz/V)
VCO
50
K
45
40
2.55 2.952.852.752.65
VCO FREQUENCY (GHz)
图8. K
与VCO频率的关系 图11. 折合到PFD输入端的PFD相位噪声与PFD频率的关系
VCO
07213-010
–145
–150
–155
(dBc/Hz)
–160
–165
PFD PHASE NOISE REFERRED TO PFD INPUT
–170
0.1 1 10010
PFD FREQUENCY (MHz)
07213-013
Rev. 0 | Page 21 of 84
AD9520-0
–208
–210
–212
–214
–216
–218
–220
PLL FIGURE OF MERIT (dBc/Hz)
–222
–224
DIFFERENTIAL INPUT
SINGLE-ENDED INPUT
0 0.4 0.8 1.20.2 0.6 1.0 1.4
INPUT SLEW RATE (V/ns)
07213-114
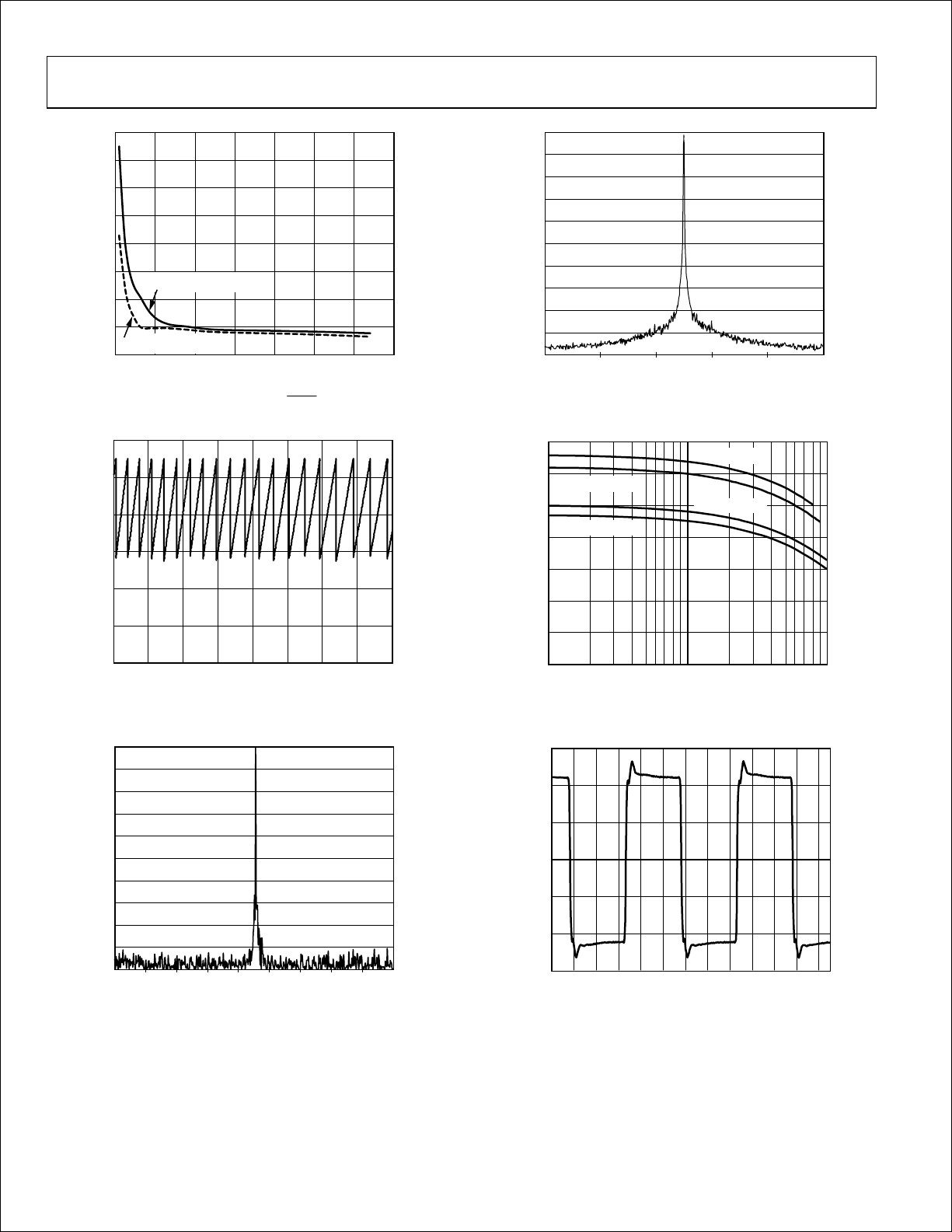
图12. PLL品质因数(FOM)与REFIN/REFIN压摆率的关系 图15. LVPECL输出频谱;122.88 MHz;PFD = 15.36 MHz;
2.1
1.9
1.7
1.5
1.3
VCO TUNING VOLTAGE (V)
1.1
0
–10
–20
–30
–40
–50
–60
POWER (dBm)
–70
–80
–90
–100
122.38 122.58 122.78 122.98 123.18 123.38
LBW = 127 kHz;I
3.5
3.0
VS_DRV = 3.135V
2.5
VS_DRV = 2.35V
2.0
(V)
OH
V
1.5
1.0
0.5
FREQUENCY (MHz)
= 3.0 mA;f
CP
VS_DRV = 3.3V
VS_DRV = 2.5V
= 2703.4 MHz
VCO
07213-117
0.9
2.55 2.952.902.852.802.752.702.652.60
FREQUENCY (GHz)
图13. VCO调谐电压与频率的关系 图16. CMOS输出V
0
–10
–20
–30
–40
–50
–60
POWER (dBm)
–70
–80
–90
–100
100 511 021 521 031 531 041 541110105
FREQUENCY (MHz)
图14. PFD/CP杂散;122.88 MHz;PFD = 15.36 MHz;
LBW = 127 kHz;I
= 3.0 mA;f
CP
= 2703.4 MHz
VCO
0
10k 1k 100
07213-115
1.2
0.8
0.4
0
–0.4
DIFFERENTIAL OUTPUT (V)
–0.8
–1.2
07213-116
RESISTIVE LOAD (Ω)
(静态)与R
OH
TIME (ns)
LOAD
(接地)的关系
07213-118
20 81 02 2241 6101 218642
4
07213-014
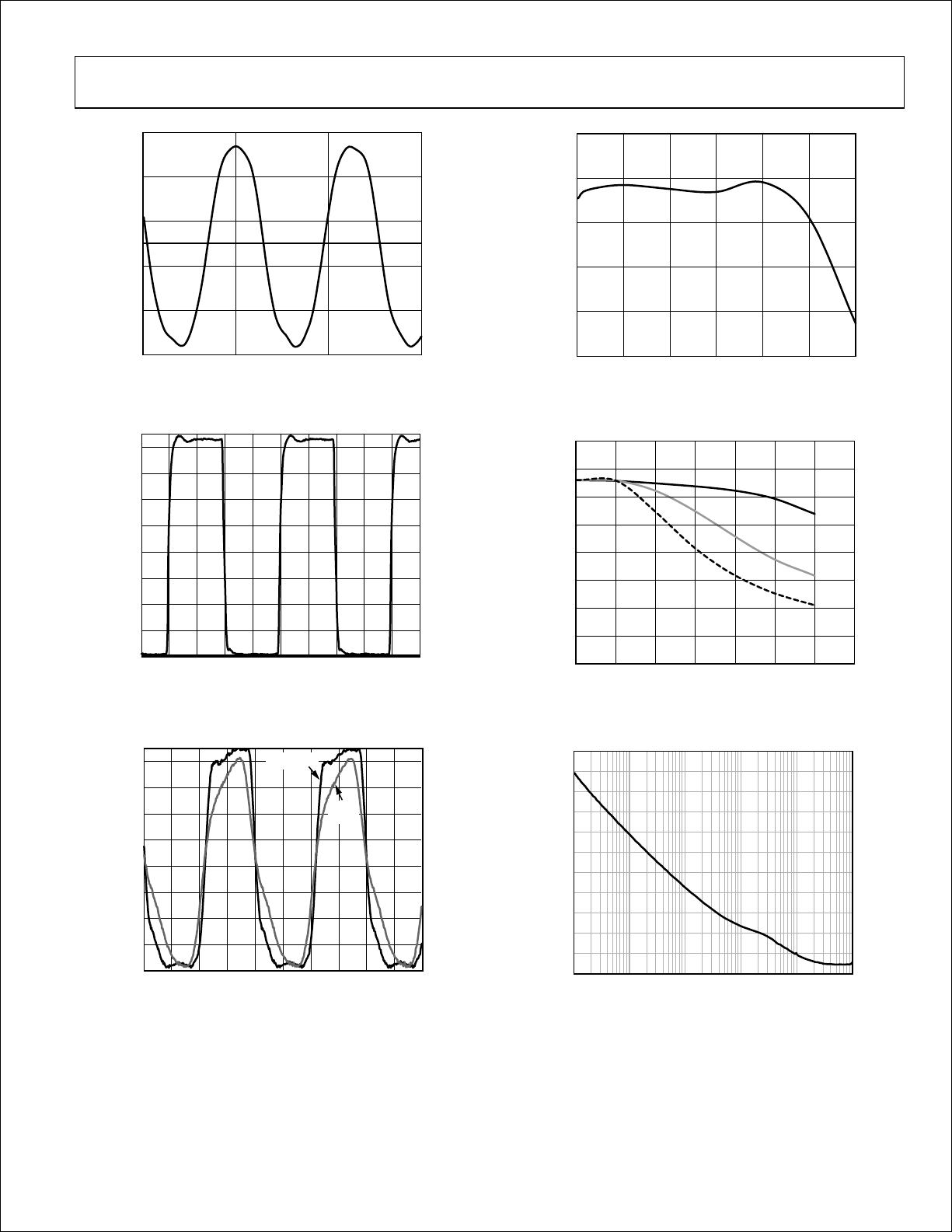
图17. LVPECL输出(差分,100 MHz)
Rev. 0 | Page 22 of 84
AD9520-0
1.0
2.0
0.6
0.2
–0.2
DIFFERENTIAL SWING (V p-p)
–0.6
–1.0
TIME (ns)
10 0.5 1.0
.5
07213-015
图18. LVPECL差分电压摆幅(1600 MHz)
3.2
2.8
2.4
2.0
1.6
AMPLITUDE (V)
1.2
0.8
0.4
0
TIME (ns)
80 60 1004020 7050 903010
0
07213-018
图19. CMOS输出(10 pF负载,25 MHz)
3.2
2.8
2.4
2.0
1.6
AMPLITUDE (V)
1.2
0.8
0.4
0
2pF LOAD
TIME (ns)
10pF
LOAD
987 6 5 4 3 2 1
10 0
07213-019
1.8
1.6
1.4
DIFFERENTIAL SWING (V p-p)
1.2
1.0
4.0
3.5
3.0
2.5
2.0
1.5
AMPLITUDE (V)
1.0
0.5
0
–40
–50
–60
–70
–80
–90
–100
–110
PHASE NOISE (dBc/Hz)
–120
–130
–140
–150
FREQUENCY (GHz)
图21. LVPECL差分电压摆幅与频率的关系
图22. CMOS输出摆幅与频率和容性负载的关系
1k 100M1M 10M100k10k
FREQUENCY (MHz)
FREQUENCY (Hz)
图20. CMOS输出(2 pF和10 pF负载,250 MHz) 图23. 内部VCO相位噪声(绝对),直接至LVPECL (2550 MHz)
30 1.5 2.0 2.51.00.5
.0
07213-123
2pF
10pF
20pF
70
600500400300200100
00
07213-124
07213-023
Rev. 0 | Page 23 of 84
AD9520-0
–40
–50
–60
–70
–80
–90
–100
–110
PHASE NOISE (dBc/Hz)
–120
–130
–140
–150
1k 100M1M 10M100k10k
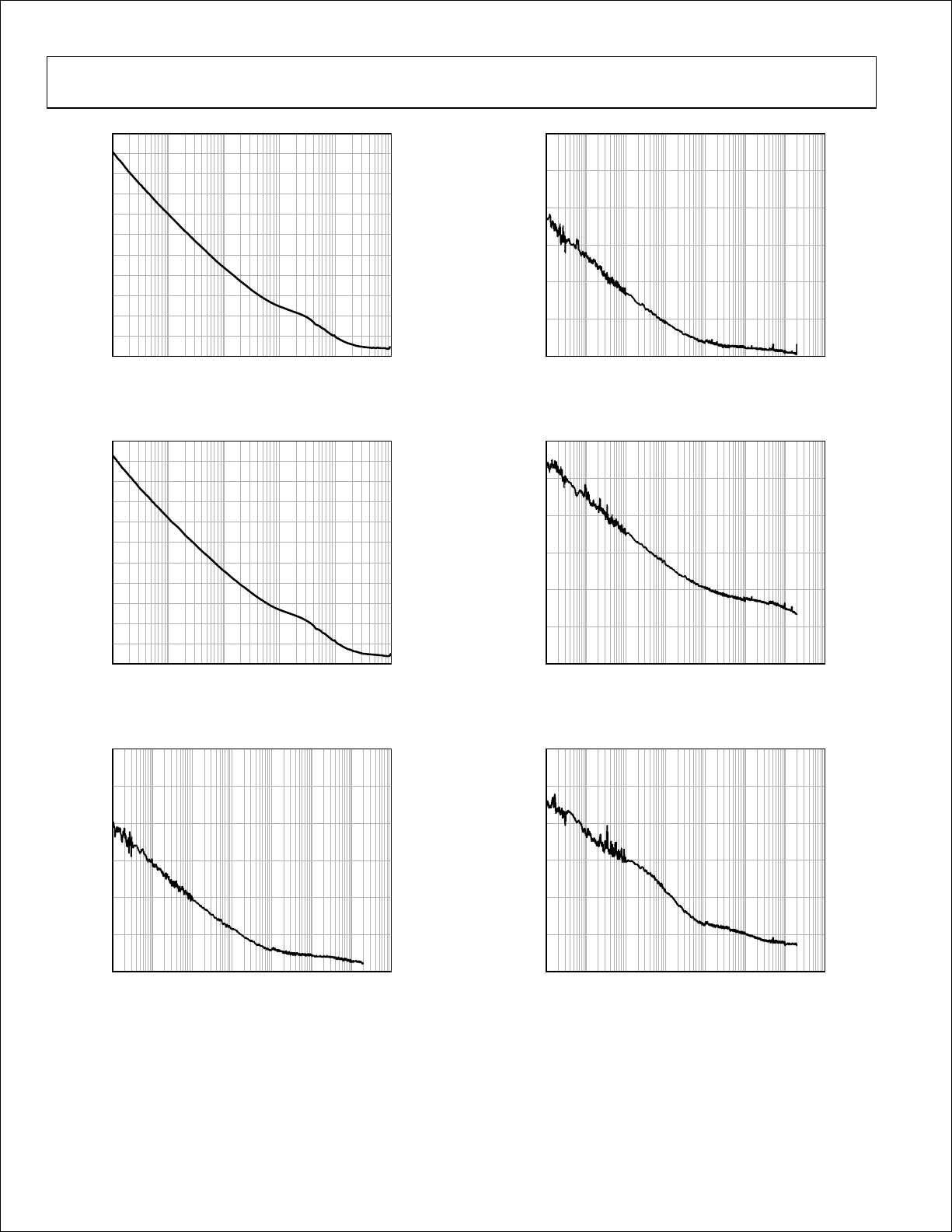
图24. 内部VCO相位噪声(绝对),直接至LVPECL (2750 MHz) 图27. 加性(残余)相位噪声,CLK至LVPECL (200 MHz),5分频
–40
–50
–60
–70
–80
–90
–100
–110
PHASE NOISE (dBc/Hz)
–120
–130
–140
–150
1k 100M1M 10M100k10k
图25. 内部VCO相位噪声(绝对),直接至LVPECL (2950 MHz) 图28. 加性(残余)相位噪声,CLK至LVPECL (1600 MHz),1分频
–100
FREQUENCY (Hz)
FREQUENCY (Hz)
07213-024
07213-025
–100
–110
–120
–130
–140
PHASE NOISE (dBc/Hz)
–150
–160
10 1k100 100M1M 10M100k10k
–100
–110
–120
–130
–140
PHASE NOISE (dBc/Hz)
–150
–160
10 1k100 100M1M 10M100k10k
–110
FREQUENCY (Hz)
FREQUENCY (Hz)
07213-129
07213-130
–110
–120
–130
–140
PHASE NOISE (dBc/Hz)
–150
–160
10 1k100 100M1M 10M100k10k
FREQUENCY (Hz)
07213-128
–120
–130
–140
–150
PHASE NOISE (dBc/Hz)
–160
–170
10 1k100 100M1M 10M100k10k
FREQUENCY (Hz)
图26. 加性(残余)相位噪声,CLK至LVPECL (245.76 MHz),1分频 图29. 加性(残余)相位噪声,CLK至CMOS (50 MHz),20分频
Rev. 0 | Page 24 of 84
07213-131
AD9520-0
–100
–110
–120
–120
–130
–130
–140
PHASE NOISE (dBc/Hz)
–150
–160
10 1k100 100M1M 10M100k10k
FREQUENCY (Hz)
07213-132
–140
PHASE NOISE (dBc/Hz)
–150
–160
1k 100M1M 10M100k10k
FREQUENCY (Hz)
图30. 加性(残余)相位噪声,CLK至CMOS (250 MHz),4分频 图33. 相位噪声(绝对),外部VCXO(Toyocom TCO-2112,245.76 MHz);
PFD = 15.36 MHz;LBW = 250 Hz;LVPECL输出 = 245.76 MHz
–100
–110
–120
–130
–140
PHASE NOISE (dBc/Hz)
–150
–160
1k 100M1M 10M100k10k
FREQUENCY (Hz)
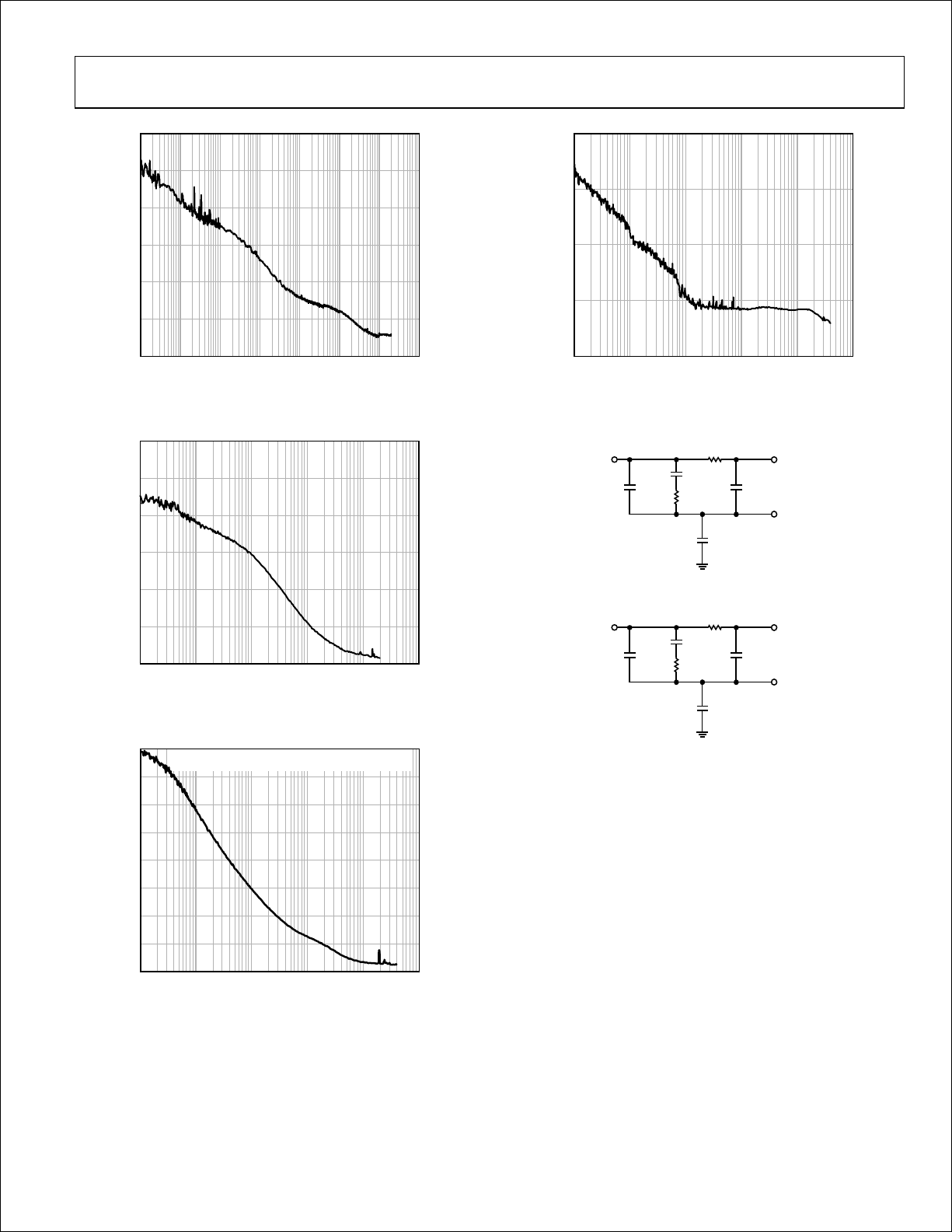
图31. 相位噪声(绝对)时钟产生;内部VCO (2.703 GHz);
PFD = 15.36 MHz;LBW = 63 kHz;LVPECL输出 = 122.88 MHz
–80
–90
INTEGRATED RMS JITTER (12kHz TO 20MHz): 652fs
C2
62pF
BYPASS
CAPACITOR
FOR LDO
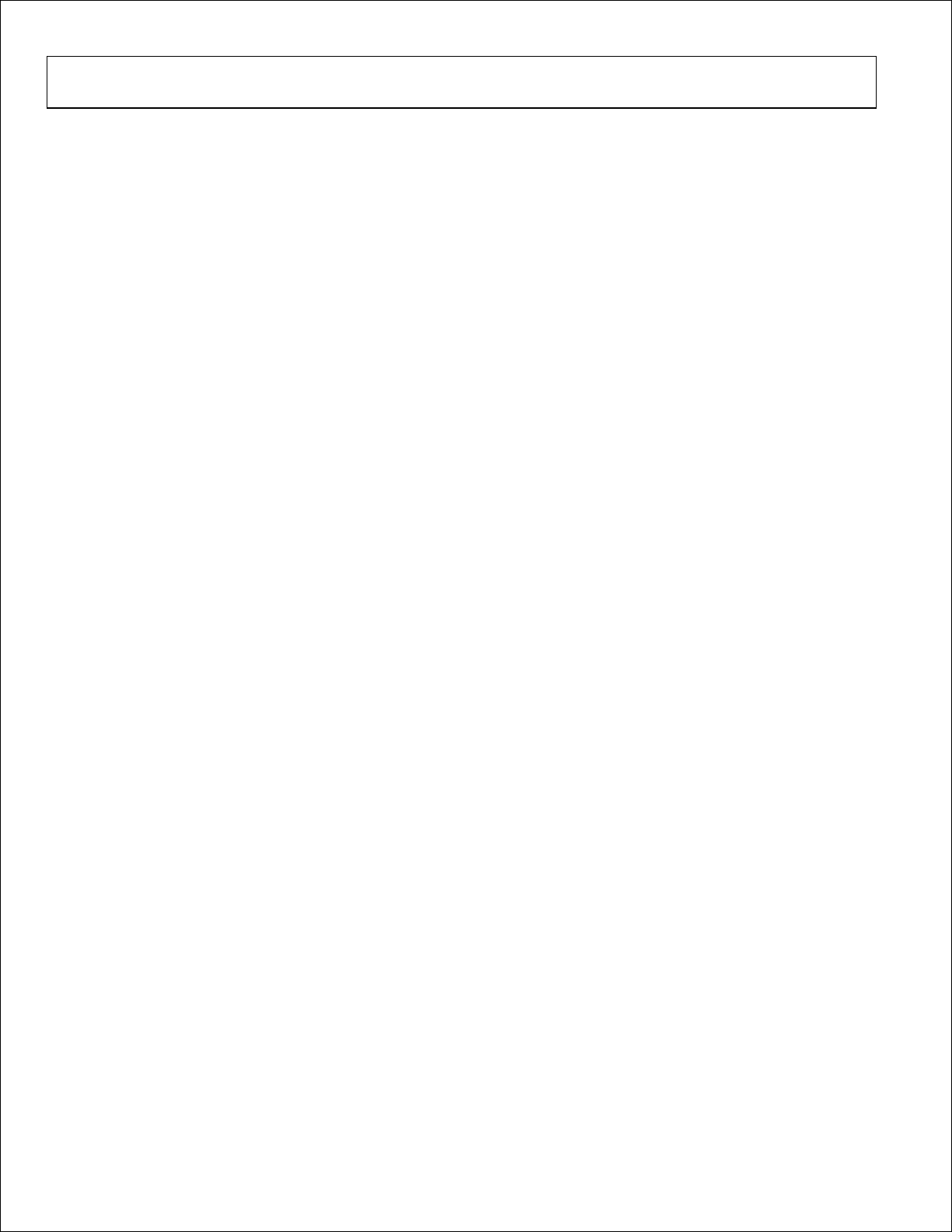
图34. 用于时钟产生的PLL环路滤波器图(见图31)
C2
1.5nF
07213-033
BYPASS
CAPACITOR
FOR LDO
图35. 用于时钟净化的PLL环路滤波器图(见图32)
C1
240nF
R1
820Ω
C1
4.7µF
R1
2.1kΩ
R2
390Ω
C12
220nF
R2
3kΩ
C12
220nF
C3
33pF
C3
2.2nF
LFCP
BYPASS
07213-234
LFCP
BYPASS
07213-235
07213-135
–100
–110
–120
–130
PHASE NOISE (dBc/Hz)
–140
–150
–160
1k 100M1M 10M100k10k
FREQUENCY (Hz)
图32. 相位噪声(绝对)时钟净化;内部VCO (2.799 GHz);
PFD = 120 kHz;LBW = 2.1 kHz;LVPECL输出 = 155.52 MHz
07213-034
Rev. 0 | Page 25 of 84
AD9520-0
术语
相位抖动和相位噪声
理想情况下,在正弦波的每个周期,相位都会随着时间从0°
连续均匀地变化到360°。不过,实际信号的相位随时间的
变化与理想情况会有一定的偏差,这种现象称为相位抖
动。导致相位抖动的原因有许多,其中一个主要原因是随
机噪声,其统计特征为高斯(正则)分布。
这种相位抖动导致正弦波能量在频域中扩散,产生连续的
功率频谱。通常将该功率频谱报告为相对于正弦波(载波)的
给定频率偏移下的一系列值,其单位为dBc/Hz。该值是1 Hz
带宽内包含的功率与载波频率时的功率之比(用dB表示)。对
于每次测量,还会给出相对于载波频率的偏移。
对一定偏移频率区间(例如10 kHz到10 MHz)内所含的总功
率进行积分很有意义。这称为该频率偏移区间内的积分相
位噪声,它与该偏移频率区间内的相位噪声所引起的时间
抖动直接相关。
相位噪声对ADC、DAC和RF混频器的性能有不利影响。虽
然影响方式不同,但它会降低转换器和混频器可实现的动
态范围。
时间抖动
相位噪声是一种频域现象。在时域内,该效应表现为时间
抖动。观察正弦波时,连续过零的时间并不固定。方波
中,时间抖动表现为边沿偏离其理想(规则)的出现时间。
这两种情况下,实际时序与理想时序的偏差即为时间抖
动。这些偏差是随机的,因此用均方根(rms)秒或高斯分布
的1 Σ来规定时间抖动。
出现在DAC或ADC采样时钟上的时间抖动会降低转换器的
信噪比(SNR)和动态范围。抖动最低的采样时钟可使给定
转换器发挥最高性能。
加性相位噪声
加性相位噪声指可归因于受测设备或子系统的相位噪声
量。所有外部振荡器或时钟源的相位噪声都会被扣除。这
样,当器件结合不同的振荡器和时钟源使用时,就可以预
测器件对系统总相位噪声的影响程度。各元件都会贡献一
定的相位噪声,但在许多情况下,某个元件的相位噪声占
居系统总相位噪声的主要部分。当有多个相位噪声源时,
总相位噪声等于各噪声源的平方和的平方根。
加性时间抖动
加性时间抖动指可归因于受测设备或子系统的时间抖动
量。所有外部振荡器或时钟源的时间抖动都会被扣除。这
样,当器件结合不同的振荡器和时钟源使用时,就可以预
测器件对系统总时间抖动的影响程度。各元件都会贡献一
定的时间抖动,但在许多情况下,外部振荡器和时钟源的
时间抖动占居系统时间抖动的主要部分。
Rev. 0 | Page 26 of 84

详细框图
OPTIONAL
REFIN
REFIN
BYPASS
LF
REF_SEL CPRSET VCPVS GND RSET
REFERENCE
REF1
REF2
SWITCHOVER
STATUS
BUF
AMP
LOW DROPOUT
REGULATOR (LDO)
STATUS
CLOCK
STATUS
P, P + 1
PRESCALER
N DIVIDER
ZERO DELAY BLOCK
DISTRIBUTION
REFERENCE
DOUBLER
A/B
COUNTERS
REFMON
R
DIVIDER
PROGRAMMABLE
PROGRAMMABLE
N DELAY
AD9520-0
LOCK
DETECT
R DELAY
PHASE
FREQUENCY
DETECTOR
PLL
REFERENCE
CHARGE
HOLD
PUMP
LD
CP
STATUS
CLK
CLK
PD
SYNC
RESET
EEPROM
SP1
SP0
SCLK/SCL
SDIO/SDA
SDO
CS
DIGITAL
LOGIC
SERIAL
PORT
DECODE
INTERFACE
SPI
EEPROM
INTERFACE
I2C
DIVIDE BY 1,
2, 3, 4, 5, OR 6
0 1
DIVIDE BY
1 TO 32
DIVIDE BY
1 TO 32
DIVIDE BY
1 TO 32
VS_DRV
OUT0
OUT0
OUT1
OUT1
OUT2
OUT2
OUT3
OUT3
OUT4
OUT4
OUT5
OUT5
OUT6
OUT6
LVPECL/CMOS OUTPUT
OUT7
OUT7
OUT8
OUT8
AD9520
DIVIDE BY
1 TO 32
图36
Rev. 0 | Page 27 of 84
OUT9
OUT9
OUT10
OUT10
OUT11
OUT11
07213-028

AD9520-0
工作原理
工作配置
AD9520有多种配置方式,必须通过加载控制寄存器进行配
置(见表49至表60)。各部分或功能必须通过设置相应的一
个或多个控制寄存器中的适当位进行独立编程。设置好所
需的配置后,用户可以将这些值存储到片内EEPROM中,
器件上电时便可以采用所需的配置,而无需用户干预。
模式0:内部VCO和时钟分配
使用内部VCO和PLL时,必须采用VCO分频器,确保提供
给通道分频器的频率不超过其额定最大频率(见表3)。内部
PLL利用外部环路滤波器设置环路带宽。该外部环路滤波
器对于环路稳定性也很重要。
使用内部VCO时,必须校准VCO (0x018[0]),确保性能最
佳。
对于内部VCO和时钟分配应用,应使用表22所示的寄存器
设置。
表22. 使用内部VCO时的设置
寄存器 描述
0x010[1:0] = 00b PLL正常工作(PLL开启)
0x010 to 0x01E
0x1E1[1] = 1b 选择VCO作为时钟源
0x01C[2:0] 使能参考输入
0x1E0[2:0] 设置VCO分频器
0x1E1[0] = 0b
0x018[0] = 0b
0x232[0] = 1b
0x018[0] = 1b
0x232[0] = 1b
PLL设置;选择并使能一路参考输入;
根据目标环路配置设置R、N(P、A、B)、
PFD极性和ICP
使用VCO分频器作为分配部分的时钟源
复位VCO校准并发出IO_UPDATE(上电后首
次工作时不需要,但随后需要)
启动VCO校准,发出IO_UPDATE
Rev. 0 | Page 28 of 84

AD9520-0
O
PTIONAL
REFIN
REFIN
BYPASS
CLK
CLK
PD
SYNC
RESET
EEPROM
REF1
REF2
REGULATOR (LDO)
LF
REF_SEL CPRSET VCPVS GND RSET
REFERENCE
SWITCHOVER
STATUS
STATUS
BUF
AMP
LOW DROPOUT
P, P + 1
PRESCALER
ZERO DELAY BLOCK
DIVIDE BY 1,
2, 3, 4, 5, OR 6
DIGITAL
LOGIC
EEPROM
STATUS
N DIVIDER
0 1
DISTRIBUTION
REFERENCE
CLOCK
DOUBLER
A/B
COUNTERS
REFMON
R
DIVIDER
PROGRAMMABLE
N DELAY
DIVIDE BY
1 TO 32
LOCK
DETECT
R DELAY
PROGRAMMABLE
PHASE
FREQUENCY
DETECTOR
PLL
REFERENCE
CHARGE
HOLD
PUMP
LD
CP
STATUS
VS_DRV
OUT0
OUT0
OUT1
OUT1
OUT2
OUT2
SP1
SP0
SCLK/SCL
SDIO/SDA
SDO
CS
SERIAL
PORT
DECODE
INTERFACE
SPI
INTERFACE
AD9520
I2C
DIVIDE BY
1 TO 32
DIVIDE BY
1 TO 32
DIVIDE BY
1 TO 32
图37. 内部VCO和时钟分配(模式0)
OUT3
OUT3
OUT4
OUT4
OUT5
OUT5
OUT6
OUT6
OUT7
OUT7
OUT8
OUT8
OUT9
OUT9
OUT10
OUT10
OUT11
OUT11
LVPECL/CMOS OUTPUT
07213-030
Rev. 0 | Page 29 of 84

AD9520-0
模式1:时钟分配或外部VCO <1600 MHz
当要分配的外部时钟源或外部VCO/VCXO小于1600 MHz
时,可以使用旁路VCO分频器的配置,这是模式2的唯一
不同之处。旁路VCO分频器时,时钟源的频率限制在1600
MHz以下(受限于通道分频器支持的最大输入频率)。
配置和寄存器设置
对于外部时钟小于1600 MHz的时钟分配应用,应使用表23
所示的寄存器设置。
表23. 时钟分配小于1600 MHz的设置
寄存器 描述
0x010[1:0] = 01b PLL异步关断(PLL关)
0x1E1[0] = 1b
0x1E1[1] = 0b 选择CLK作为时钟源
在外部VCO小于1600 MHz的情况下使用内部PLL时,必须
开启PLL。
旁路作为分配部分时钟源的VCO分频器
表24. 在外部VCO小于1600 MHz时使用内部PLL的设置
寄存器 描述
0x1E1[0] = 1b
0x010[1:0] = 00b
外部VCO/VCXO需要外部环路滤波器,必须将该环路滤波
旁路作为分配部分时钟源的VCO分频器
PLL正常工作(PLL开启),
以及0x010至0x01E中的其它适当PLL设置
器连接在CP与VCO/VCXO的调谐引脚之间。该环路滤波
器决定环路带宽和PLL的稳定性。针对所用的
VCO/VCXO,务必选择正确的PFD极性。
表25. 设置PFD极性
寄存器 描述
0x010[7] = 0b
0x010[7] = 1b
PFD正极性(较高的控制电压产生较高的频率)
PFD负极性(较高的控制电压产生较低的频率)
Rev. 0 | Page 30 of 84

AD9520-0
OPTIONAL
REFIN
REFIN
BYPASS
CLK
CLK
PD
SYNC
RESET
EEPROM
REF1
REF2
REGULATOR (LDO)
LF
REF_SEL CPRSET VCPVS GND RSET
REFERENCE
SWITCHOVER
STATUS
STATUS
BUF
AMP
LOW DROPOUT
P, P + 1
PRESCALER
ZERO DELAY BLOCK
DIVIDE BY 1,
2, 3, 4, 5, OR 6
DIGITAL
LOGIC
EEPROM
STATUS
N DIVIDER
0 1
DISTRIBUTION
REFERENCE
CLOCK
DOUBLER
A/B
COUNTERS
REFMON
R
DIVIDER
PROGRAMMABLE
N DELAY
DIVIDE BY
1 TO 32
LOCK
DETECT
R DELAY
PROGRAMMABLE
PHASE
FREQUENCY
DETECTOR
PLL
REFERENCE
CHARGE
HOLD
PUMP
LD
CP
STATUS
VS_DRV
OUT0
OUT0
OUT1
OUT1
OUT2
OUT2
SP1
SP0
SCLK/SCL
SDIO/SDA
SDO
CS
SERIAL
PORT
DECODE
INTERFACE
SPI
INTERFACE
AD9520
I2C
DIVIDE BY
1 TO 32
DIVIDE BY
1 TO 32
DIVIDE BY
1 TO 32
图38. 时钟分配或外部VCO <1600 MHz(模式1)
OUT3
OUT3
OUT4
OUT4
OUT5
OUT5
OUT6
OUT6
OUT7
OUT7
OUT8
OUT8
OUT9
OUT9
OUT10
OUT10
OUT11
OUT11
LVPECL/CMOS OUTPUT
07213-031
Rev. 0 | Page 31 of 84

AD9520-0
模式2:高频时钟分配—CLK或外部VCO > 1600 MHz
在AD9520的上电默认配置中,PLL关断,CLK/CLK输入通
过VCO分频器(1分频/2分频/3分频/4分频/5分频/6分频)连接
到分配部分。这是一种仅分配模式,支持最高达2400 MHz
的外部输入(见表3)。能够施加于通道分频器的最大频率为
1600 MHz,因此,更高的输入频率必须降频后才能到达通
道分频器。
当PLL使能时,这种连接也支持PLL与频率小于2400 MHz的
外部VCO或VCXO一起使用。该配置不使用内部VCO,因
而将其关断。外部VCO/VCXO直接馈入预分频器。
表26所示的寄存器设置是复位操作后这些寄存器在上电时
的默认值。
表26. 时钟分配模式的默认寄存器设置
寄存器
0x010[1:0] = 01b PLL异步关断(PLL关)
0x1E0[2:0] = 000b 设置VCO分频比 = 2
0x1E1[0] = 0b 设置VCO分频比 = 2
0x1E1[1] = 0b 选择CLK作为时钟源
内部PLL与外部VCO一起使用时,必须开启PLL。
描述
表27. 使用外部VCO时的设置
寄存器
0x010[1:0] = 00b PLL正常工作(PLL开启)
0x010 to 0x01E
描述
PLL设置;选择并使能一路参考输入;
根据目标环路配置设置R、N(P、A、B
PFD极性和ICP
)、
0x1E1[1] = 0b 选择CLK作为时钟源
外部VCO需要外部环路滤波器,必须将该环路滤波器连接
在CP与VCO的调谐引脚之间。该环路滤波器决定环路带宽
和PLL的稳定性。针对所用的VCO,务必选择正确的PFD极
性。
表28. 设置PFD极性
寄存器
0x010[7] = 0b
0x010[7] = 1b
描述
PFD正极性(较高的控制电压产生较高
的频率
)
PFD负极性(较高的控制电压产生较低
的频率)
Rev. 0 | Page 32 of 84

O
AD9520-0
PTIONAL
REFIN
REFIN
BYPASS
CLK
CLK
PD
SYNC
RESET
EEPROM
REF1
REF2
REGULATOR (LDO)
LF
REF_SEL CPRSET VCPVS GND RSET
REFERENCE
SWITCHOVER
STATUS
STATUS
BUF
AMP
LOW DROPOUT
P, P + 1
PRESCALER
ZERO DELAY BLOCK
DIVIDE BY 1,
2, 3, 4, 5, OR 6
DIGITAL
LOGIC
EEPROM
STATUS
N DIVIDER
0 1
DISTRIBUTION
REFERENCE
CLOCK
DOUBLER
A/B
COUNTERS
REFMON
R
DIVIDER
PROGRAMMABLE
N DELAY
DIVIDE BY
1 TO 32
LOCK
DETECT
R DELAY
PROGRAMMABLE
PHASE
FREQUENCY
DETECTOR
PLL
REFERENCE
CHARGE
HOLD
PUMP
LD
CP
STATUS
VS_DRV
OUT0
OUT0
OUT1
OUT1
OUT2
OUT2
SP1
SP0
SCLK/SCL
SDIO/SDA
SDO
CS
SERIAL
PORT
DECODE
INTERFACE
SPI
INTERFACE
AD9520
I2C
DIVIDE BY
1 TO 32
DIVIDE BY
1 TO 32
DIVIDE BY
1 TO 32
图39. 高频时钟分配或外部VCO >1600 MHz(模式2)
OUT3
OUT3
OUT4
OUT4
OUT5
OUT5
OUT6
OUT6
OUT7
OUT7
OUT8
OUT8
OUT9
OUT9
OUT10
OUT10
OUT11
OUT11
LVPECL/CMOS OUTPUT
7213-029
Rev. 0 | Page 33 of 84

AD9520-0
锁相环(PLL)
OPTIONAL
BYPASS
REFIN
REFIN
CLK
CLK
REF1
REF2
REGULATOR (LDO)
LF
REF_SEL CPRSET VCPVS GND RSET
REFERENCE
SWITCHOVER
STATUS
STATUS
BUF
LOW DROPOUT
P, P + 1
PRESCALER
ZERO DELAY BLOCK
DIVIDE BY 1,
2, 3, 4, 5, OR 6
STATUS
N DIVIDER
0 1
DISTRIBUTION
REFERENCE
CLOCK
DOUBLER
A/B
COUNTERS
图40. PLL功能模块
REFMON
R
DIVIDER
PROGRAMMABLE
N DELAY
FROM CHANNEL
DIVIDER 0
LOCK
DETECT
R DELAY
PROGRAMMABLE
PHASE
FREQUENCY
DETECTOR
PLL
REFERENCE
CHARGE
PUMP
HOLD
LD
CP
STATUS
VS_DRV
7213-064
AD9520片内集成PLL和VCO。PLL模块可以结合片内VCO
使用,构成一个完整的锁相环,或者结合外部VCO或
VCXO使用。PLL需要一个外部环路滤波器,它通常由少量
电容和电阻组成。环路滤波器的配置和元件有助于建立工
作PLL的带宽并确保其稳定性。
AD9520 PLL可用于从提供的参考频率产生时钟频率,包括
将参考频率转换为高得多的频率,以便随后进行分频和分
配。此外,PLL可以用来清除高噪声参考的抖动和相位噪
声。PLL参数和环路动态特性的确切选择取决于具体应
用。AD9520 PLL十分灵活且具深度,因而可以定制该器件
以用于许多不同的应用和信号环境。
PLL配置
AD9520 PLL的配置十分灵活,支持各种参考频率、PFD比
较频率、VCO频率、内部或外部VCO/VCXO以及环路动态
特性。上述支持是通过R分频器、N分频器、PFD极性(仅适
用于外部VCO/VCXO)、防反冲脉冲宽度、电荷泵电流、内
部VCO或外部VCO/VCXO的选择以及环路带宽的各种设置
实现的,这些设置通过可编程寄存器设置(见表49和表53)
以及外部环路滤波器的设置进行管理。
成功的PLL运作和满意的PLL环路性能高度依赖于PLL设置
的正确配置,而外部环路滤波器的设计对于PLL的正常工
作至关重要。
TM
ADIsimCLK
是一款免费程序,可帮助设计和探索AD9520
的能力和特性,包括PLL环路滤波器的设计。ADIsimCLK
1.2版中的AD9516模型也可以用于AD9520环路滤波器的建
模,请访问:www.analog.com/clocks。
鉴频鉴相器(PFD)
PFD接受R分频器和N分频器的输入,产生与二者的相位和
频率差成比例的输出。PFD内置一个可编程延迟元件,用
来控制防反冲脉冲的宽度。此脉冲可确保PFD传递函数中
无死区,并使相位噪声和参考杂散最小。防反冲脉冲宽度
由0x017[1:0]设置。
必须注意一项重要的限制条件,即PFD支持的最大频率。
PFD的最大输入频率是防反冲脉冲设置的函数,参见表2中
鉴频鉴相器(PFD)参数的规定。
Rev. 0 | Page 34 of 84

电荷泵(CP)
电荷泵由PFD控制。PFD监控其两路输入之间的相位和频
率关系,并告知电荷泵补充或移除电荷,从而给积分节点
(环路滤波器的一部分)充电或放电。经过积分和滤波的电
荷泵电流转化为电压,通过LF引脚驱动内部VCO的调谐节
点(或外部VCO的调谐引脚),以便提高或降低VCO频率。
电荷泵可以设置(0x010[3:2])为高阻抗模式(支持保持工
作)、正常工作模式(尝试锁定PLL环路)、充电或放电模式
(测试模式)。电荷泵电流可以在标称值600 μA至4.8 mA范围
内分8步设置。电荷泵电流LSB的确切值由标称值为5.1 kΩ
的CPRSET电阻设置。
片内VCO
AD9520片内集成VCO,其涵盖的频率范围如表2所示。实
现了低相位噪声是VCO设计的一个优先目标。
为了在该VCO涵盖的宽频率范围内进行调谐,需使用不同
的范围。这在很大程度上对用户是透明的,但正因如此,
所以在初次设置PLL环路时,必须校准VCO。针对所需的
VCO频率,校准程序确保VCO在正确的频段范围内工作。
更多信息参见“VCO校准”部分。
片内VCO由片内低压差(LDO)线性电压调节器供电。LDO
为VCO提供一定的隔离,使之不受电源电压变化的影响。
BYPASS引脚应通过一个220 nF电容连接到地,确保稳定
®
性。此LDO采用与ADI公司anyCAP
术,对所用电容的类型不敏感。不支持从BYPASS引脚驱动
外部负载。
PLL外部环路滤波器
使用内部VCO时,外部环路滤波器应参考BYPASS引脚,以
实现最佳的噪声和杂散性能。图41显示了一个用于PLL的
外部环路滤波器示例。环路滤波器必须针对所需的每种
PLL配置进行计算。元件值取决于VCO频率、K
率、CP电流、所需的环路带宽以及所需的裕量。环路滤波
器影响相位噪声、环路建立时间和环路稳定性。要了解环
路滤波器设计,关于PLL理论的知识是必不可少的。
ADIsimCLK等工具可以帮助用户根据应用要求计算环路滤
波器。
系列调节器相同的技
、PFD频
VCO
AD9520-0
AD9520
LF
VCO
CHARGE
PUMP
图41. PLL外部环路滤波器示例
CP
BYPASS
C
= 220nF
BP
PLL参考输入
AD9520具有一个灵活的PLL参考输入电路,通过片内保持
放大器支持一路全差分输入、两路独立的单端输入或16.67
MHz/33.33 MHz晶体振荡器。可选的参考时钟倍频器可用
来使PLL参考频率加倍。参考输入的输入频率范围见表2的
规定。差分输入和单端输入均为自偏置,输入信号可以轻
松进行交流耦合。
差分或单端参考必须明确使能。PLL的所有参考输入在默
认情况下均关闭。
差分输入和单端输入共用两个引脚:REFIN(REF1)/REFIN
(REF2)。所需的参考输入类型通过0x01C选择和控制(见表
49和表53)。
选择差分参考输入时,两端的自偏置电平略微偏移,以防
输入缓冲器在参考较慢或丢失时发生震颤。关于该电平的
规定见表2。输入迟滞提高驱动器需要提供的电压摆幅,以
消除偏移的影响。
单端输入可以通过直流耦合CMOS电平信号或交流耦合正
弦波或方波驱动。当单端交流耦合输入信号停止切换时,
为了防止输入缓冲器震颤,用户可以将0x018[7]设置为1b,
这会使直流偏移偏置点降低140 mV。为了提高隔离效果并
降低功耗,各单端输入可以独立关断。
当未选择差分参考输入或者PLL关断时,差分参考输入接
收器关断。当PLL关断或相应的关断寄存器置1时,单端缓
冲器关断。选择差分模式时,单端输入关断。
R2
R1
C1 C2 C3
7213-065
Rev. 0 | Page 35 of 84

AD9520-0
在差分模式下,参考输入引脚内部自偏置,因而能够通过
电容交流耦合。也可以直流耦合到这些。如果以单端信号
驱动差分REFIN,则未使用端(REFIN)应通过适当的电容去
耦到无噪声地。图42给出了REFIN的等效电路。
VS
参考切换有多种可配置的模式。切换可以手动或自动进
行。手动切换通过寄存器0x01C或使用REF_SEL引脚进行。
自动切换发生于REF1消失时。还有一个切换去抖特性,用
于确保PLL不会接收到与新选定的参考远未对齐的上升
沿。
自动参考切换有两种模式(0x01C):
85kΩ
REF1
VS
REFIN
REFIN
REF2
图42. 非XTA L 模式下的REFIN等效电路
10kΩ 12kΩ
150Ω
150Ω
10kΩ 10kΩ
VS
85kΩ
07213-066
晶振模式几乎与差分模式相同。用户通过将Enable XTAL
OSC位置1,并在REFIN/REFIN引脚上放置一个串联谐振AT
基本切割晶体,而使能保持放大器。
参考切换
AD9520不仅支持单路差分参考输入,而且支持双路单端
CMOS输入。在双路单端参考模式下,AD9520支持REF1
(引脚REFIN上)与REF2(引脚REFIN上)之间的自动和手动
PLL参考时钟切换,该特性支持需要冗余参考的网络和其
它应用。
在单端模式下,AD9520具有一个直流偏移选项。当参考输
入交流耦合并且参考时钟消失时,利用该选项可以消除参
考输入震颤的风险。使用参考切换时,单端参考输入应为
直流耦合的CMOS电平(AD9520直流偏移特性禁用)。或
者,这些输入可以交流耦合并且使能直流偏移。然而,用
户应注意,当直流偏移开启时,参考输入的最小输入幅度
更大。
• 优先使用REF1。当REF1消失时,从REF1切换到
REF2; 当REF1重新出现时,从REF2切换回REF1。
• 继续使用REF2。当REF1消失时,自动切换到REF2,
但当REF1重新出现时,不切换回REF1。在适当的时候
可以手动将参考重新设置为REF1。
在自动模式下,REF1由REF2监控。如果REF1消失(REF2上
有连续两个下降沿,而REF1上无边沿跃迁),则认为REF1
丢失。在REF2的下一个上升沿,REF2用作PLL的参考时
钟。如果0x01C[3] = 0b(默认),则当REF1重新出现时(REF1
上有四个上升沿,而在REF1的边沿之间REF2没有两个下降
沿),PLL参考切换回REF1。如果0x01C[3] = 1b,则用户可
以控制何时切换回REF1,这是通过将器件设置为手动参考
选择模式(0x01C[4] = 0b),并且确保寄存器和/或REF_SEL引
脚被设置为选择所需的参考而实现的。再次选择REF1后,
便可再次使能自动模式。
手动切换要求目标参考输入上存在一个时钟,或者去抖特
性禁用(0x01C[7])。
参考分频器R
参考输入被送至参考分频器R。通过写入0x011和0x012,可
以将R(14位计数器)设置为0到16,383的任何值(R = 0和R = 1
时,分频比均为1)。R分频器的输出进入PFD输入之一,以
便与VCO频率经N分频器分频后的结果进行比较。施加于
PFD的频率不得超过最大容许频率,最大容许频率取决于
防反冲脉冲设置(见表2)。
R分频器本身可以复位。利用R、A和B计数器共享的复位
位,可以复位R分频器。它也可以通过SYNC操作复位。
VCO/VCXO反馈分频器N:P、A、B、R
N分频器由一个预分频器(P)和两个计数器(A和 B)组合而
成。总分频器值为:
N = (P × B) + A
其中,P可以为2、4、8、16或32。
Rev. 0 | Page 36 of 84

预分频器
AD9520的预分频器支持两种工作模式:固定分频(FD)模式
(1、2或3)和双模(DM)模式。在双模模式中,预分频器除以
P和(P + 1)(2和3、4和5、8和9、16和17或32和33)。预分频器
的工作模式参见表53 0x016[2:0]。并不是所有频率下都可以
使用所有模式(见表2)。
AD9520在双模模式P/(P + 1)下工作时,输入参考频率与VCO
输出频率的关系如下:
f
= (f
VCO
/R) × (P × B + A) = f
REF
然而,当预分频器在FD模式1、FD模式2或FD模式3下工作
时,A计数器不使用(A = 0),因此上式可以简化为:
f
= (f
VCO
/R) × (P × B) = f
REF
当A = 0时,分频比为固定值:P = 2、4、8、16或32。
通过使用DM和FD模式的组合,AD9520可以实现各种N
值,最小值N = 1。表29显示了10 MHz参考输入如何锁定N
的任意整数倍。
注意,同一N值可以通过不同方式产生,如表中N = 12所
示。用户可以使用P = 2、B = 6的固定分频模式,使用A =
0、B = 6的双模模式2/3,或者使用A = 0、B = 3的双模模式
4/5。
× N/R
REF
× N/R
REF
AD9520-0
A/B计数器的最大输入频率反映在表2规定的预分频器最大
输出频率(~300 MHz)中,这是预分频器输入频率(VCO或
CLK)除以P的结果。例如,如果VCO频率大于2400 MHz,
则不支持双模P = 8/9模式,因为输入A/B计数器的频率太
高。
当AD9520 B计数器旁路(B = 1)时,A计数器应设为0,总分频
值等于预分频器设置P。这种模式下,可能的分频比为1、
2、3、4、8、16和32。这种模式仅在使用VCO/VCXO时才
有用,因为内部VCO的频率范围要求总反馈分频值大于
32。
虽然一般不需要手动复位,但A/B计数器有自己的复位
位。利用R、A和B计数器共享的复位位,也可以复位A和
计数器。注意,这些复位位不会自清0。
R、A和B计数器:SYNC 引脚复位
通过SYNC引脚,可以同时复位R、A和B计数器。此功能由
0x019[7:6]控制(见表53)。SYNC引脚复位默认禁用。
R和N分频器延迟
R和N分频器具有可编程延迟单元,可以使能这些延迟来调
整PLL参考时钟与VCO或CLK之间的相位关系。每个延迟
由三位控制,总延迟范围约为1 ns。参见表53中的0x019。
A和B计数器
B计数器必须≥3或旁路;与R计数器不同,A = 0时,A确实
为0。
表29. 10 MHz参考输入如何锁定N的任意整数倍
f
(MHz) R P A B N f
REF
10 1 1 X
10 1 2 X
10 1 1 X
10 1 1 X
10 1 1 X
10 1 2 X
1
1 1 10 FD P = 1, B = 1(旁路)
1
1 2 20 FD P = 2, B = 1(旁路)
1
3 3 30 FD P = 1, B = 3
1
4 4 40 FD P = 1, B = 4
1
5 5 50 FD P = 1, B = 5
1
3 6 60 FD P = 2, B = 3
(MHz) 模式 注释
VCO
10 1 2 0 3 6 60 DM P和P + 1 = 2和3, A = 0, B = 3
10 1 2 1 3 7 70 DM P和P + 1 = 2和3, A = 1, B = 3
10 1 2 2 3 8 80 DM P和P + 1 = 2和3, A = 2, B = 3
10 1 2 1 4 9 90 DM P和P + 1 = 2和3, A = 1, B = 4
10 1 2 X
1
5 10 100 FD P = 2, B = 5
10 1 2 0 5 10 100 DM P和P + 1 = 2和3, A = 0, B = 5
10 1 2 1 5 11 110 DM P和P + 1 = 2和3, A = 1, B = 5
10 1 2 X
1
6 12 120 FD P = 2, B = 6
10 1 2 0 6 12 120 DM P和P + 1 = 2和3, A = 0, B = 6
10 1 4 0 3 12 120 DM P和P + 1 = 4和5, A = 0, B = 3
10 1 4 1 3 13 130 DM P和P + 1 = 4和5, A = 1, B = 3
1
X = 无关位。
Rev. 0 | Page 37 of 84

AD9520-0
数字锁定检测(DLD)
通过各引脚上的多路复用器选择适当的输出,可以在LD、
STATUS和REFMON引脚上提供DLD功能。当PFD输入端的
上升沿时间差小于规定的值(锁定阈值)时,数字锁定检测
电路指示锁定。当该时间差超过规定的值(解锁阈值)时,
指示失锁。注意,解锁阈值宽于锁定阈值,因而允许相位
误差在一定程度上超过锁定窗口,但锁定指示器不会震颤。
锁定检测窗口时序取决于CPRSET电阻的值和以下三个设
置:数字锁定检测窗口位(0x018[4])、防反冲脉冲宽度位
(0x017[1:0],见表2)和锁定检测计数器(0x018[6:5])。表2中
的锁定和解锁检测值适用于标称值CPRSET = 5.11 kΩ。如果
CPRSET值增加一倍达到10 kΩ,则表2中的值也会加倍。
只有在可编程数量的连续PFD周期内,时间差一直小于锁
定检测阈值,才会指示锁定。此后锁定检测电路将继续指
示锁定,直到后续一个周期内的时间差大于解锁阈值。为
使锁定检测正常工作,PFD频率的周期必须大于解锁阈
值。锁定要求的连续PFD周期数是可编程的(0x018[6:5])。
注意,在某些低环路带宽(<500 Hz)、高相位裕量的情况下,
DLD可能会在获取期间震颤,导致AD9520自动进入和退出
保持模式。为避免发生该问题,建议用户在LD引脚上连接
一个接地电容,以便能够使用电流源数字锁定检测
(CSDLD)模式。
模拟锁定检测(ALD)
AD9520提供模拟锁定检测(ALD)功能,LD引脚可以选择使
用该功能。ALD有两种工作模式:
• N沟道开漏锁定检测。该信号需要通过一个上拉电阻拉
至正电源VS。在较短的趋低脉冲下,输出一般为高电
平。锁定由趋低脉冲的最小占空比指示。
• P沟道开漏锁定检测。该信号需要通过一个下拉电阻拉
至GND。在较短的趋高脉冲下,输出一般为低电平。锁
定由趋高脉冲的最小占空比指示。
模拟锁定检测功能需要一个RC滤波器来提供逻辑电平以指
示锁定/解锁。用户可以利用ADIsimCLK工具来帮助选择用
于ALD的合适无源元件值,以确保该功能正常工作。
VS = 3.3V
AD9520
LD
ALD
图43. 模拟锁定检测滤波器示例,使用N沟
道开漏驱动器
R2
V
R1
OUT
C
07213-067
电流源数字锁定检测(CSDLD)
在PLL锁定序列中,DLD信号一般要切换多次后才会保持
稳定,此时PLL完全锁定并处于稳定状态。某些应用中,
可能希望DLD在PLL完全锁定后才置位。通过使用电流源
锁定检测功能,这是可以实现的。启用该功能的方法如
下:在LD引脚上连接一个接地电容,并选择DLD作为LD引
脚的输出(0x01A[5:0] = 0x00)。
使能LD引脚比较器(0x01D[3] = 1)时,用户可以:
• 将CSDLD与自动切换和保持一起使用。
• 在STATUS和REFMON引脚上查看CSDLD状态。
当DLD为真时,电流源锁定检测提供110 μA的电流;当DLD
为假时,电流源锁定检测短接至地。如果将一个电容连接
到LD引脚,则在DLD为真期间,电容会以电流源所决定的
速率充电;但当DLD为假时,电容几乎立即放电。通过监
控LD引脚的电压(电容顶部),LD只有在DLD为真并保持足
够长的时间后才会变为高电平。任何短暂的DLD假状况都
会使电荷归零。通过选择适当大小的电容,可以将锁定检
测指示延迟到PLL稳定锁定并且锁定检测不震颤时。
电容上的电压可以通过连接到LD引脚的外部比较器检测。
然而,LD引脚内置一个比较器,可以通过REFMON引脚控
制(0x01B[4:0])或STATUS引脚控制(0x017[7:2])作为高电平有
效信号读取。它也可以作为低电平有效信号提供(REFMON
0x01B[4:0]和STATUS, 0x017[7:2])。LD引脚内部比较器的跳
变点和迟滞参见表17。
使用CSDLD时,用户还可以在CSDLD为高电平时异步使能
各时钟输出。要使能该特性,应将CSDLD寄存器(0x0FC和
0x0FD)中的适当使能输出位置1。
Rev. 0 | Page 38 of 84
AD9520
110µA
DLD
LD PIN
COMPARATOR
图44. 电流源数字锁定检测
LD
REFMON
OR
STATUS
V
OUT
C
07213-068

C
C
外部VCXO/VCO时钟输入(CLK/C LK)
该差分输入用于驱动AD9520时钟分配部分,支持最高2.4 GHz
的频率。引脚内部自偏置,输入信号应通过电容交流耦
合。
CLOCK INPUT
VS
LK
LK
2.5kΩ 2.5kΩ
5kΩ
5kΩ
图45. CLK等效输入电路
CLK/CLK输入既可以只用作分配输入(PLL关闭),也可以用
作外部VCO/VCXO的反馈输入(使用内部PLL,不使用内部
VCO)。这些输入也用作外部零延迟模式的反馈路径。
保持
AD9520 PLL具有保持功能。保持是通过将电荷泵置于高阻
态而实现的。当PLL参考时钟丢失时,此功能很有用。在
保持模式下,即使没有参考时钟,VCO也能维持一个相对
恒定的频率。如果没有此功能,电荷泵将被置于持续增强
或减弱状态,导致VCO频率大幅偏移。由于电荷泵被置于
高阻态,因此电荷泵输出或VCO调谐节点的任何泄漏都会
导致VCO频率偏移。这可以通过一个包含大容性元件的环
路滤波器来解决,因为此偏移受限于VCO控制电压的压摆
率(I
/C)引起的漏电流。
LEAK
该器件提供两种保持模式:使用SYNC引脚的手动保持模式
和自动保持模式。无论何种模式,首先必须使能保持功能
(0x01D[0])。
STAGE
07213-032
AD9520-0
外部/手动保持模式
在手动保持模式下,用户可以将SYNC引脚拉低,使电荷泵
进入高阻态。该操作对边沿敏感,而不是对电平敏感。电
荷泵会立即进入高阻态。要使电荷泵脱离高阻态,应将
SYNC引脚拉高。然后,电荷泵在参考时钟的下一个PFD上
升沿的同时离开高阻态。这可以防止外来电荷泵事件在
SYNC变为高电平与下一个PFD事件之间的时间内发生。同
时,这还意味着,如果没有参考时钟,电荷泵将一直处于
高阻态。
B计数器(位于N分频器中)在电荷泵因参考路径PFD事件而
离开高阻态的同时复位,这有助于对齐R和N分频器的边
沿,使PLL更快建立。由于预分频器未复位,因此当B数与
R数接近时,该功能效果最佳,此时环路要消除的相位差
较小。
使用该模式时,应设置通道分频器忽略SYNC引脚(至少在
初始SYNC事件之后)。如果未设置分频器忽略SYNC引脚,
则每次SYNC拉低都会将器件置于保持模式,分配输出关
闭。通道分频器0、1、2、3的忽略同步功能分别通过0x191
[6]、0x194[6]、0x197[6]、0x19A[6]设置。
自动/内部保持模式
如果使能此功能,则当环路失锁时,电荷泵自动进入高阻
态。这里有一个假设,即环路失锁的唯一原因是PLL丢失
参考时钟,因此,保持功能将电荷泵置于高阻态,使VCO
频率尽可能接近参考时钟消失前的原始频率。
图46给出了自动/内部保持功能操作的流程图。
Rev. 0 | Page 39 of 84

AD9520-0
PLL ENABLED
DLD == LOW
YES
WAS
LD PIN == HIGH
WHEN DLD WENT
LOW?
YES
HIGH IMPEDANCE
CHARGE PUMP
YES
REFERENCE
EDGE AT PFD?
YES
NO
NO
LOOP OUT OF LOCK. DIGITAL LOCK
DETECT SIGNAL GOES LOW WHEN THE
LOOP LEAVES LOCK AS DETERMINED
BY THE PHASE DIFFERENCE AT THE
INPUT OF THE PFD.
NO
ANALOG LOCK DETECT PIN INDICATES
LOCK WAS PREVIOUSLY ACHIEVED.
(0x01D[3] = 1; USE LD PIN VOLTAGE
WITH HOLDOVER.
0x01D[3] = 0; IGNORE LD PIN VOLTAGE,
TREAT LD PIN AS ALWAYS HIGH.)
CHARGE PUMP IS MADE
HIGH IMPEDANCE.
PLL COUNTERS CONTINUE
OPERATING NORMALLY.
CHARGE PUMP REMAINS HIGH
IMPEDANCE UNTIL THE REFERENCE
HAS RETURNED.
YES
RELEASE
CHARGE PUMP
HIGH IMPEDANCE
YES
NO
DLD == HIGH
图46. 自动/内部保持模式流程图
保持功能检测LD引脚的逻辑电平,作为进入保持模式的一
个条件。LD的信号可以来自DLD、ALD或电流源LD模式。
可以禁用LD比较器(0x01D[3]),使得保持功能始终检测到
LD为高电平。如果使用DLD,则当PLL重新获取锁定时,
DLD信号可能会震颤。保持功能可能会重新触发,防止保
持模式终止。建议使用电流源锁定检测模式来避免这种情
况(参见“电流源数字锁定检测(CSDLD)”部分)。
TAKE CHARGE PUMP OUT OF
HIGH IMPEDANCE. PLL CAN
NOW RESETTLE.
WAIT FOR DLD TO GO HIGH. THIS TAKES
5 TO 255 CYCLES (PROGRAMMING OF THE DLD
DELAY COUNTER) WITH THE REFERENCE AND
FEEDBACK CLOCKS INSIDE THE LOCK WINDOW AT
THE PFD. THIS ENSURES THAT THE HOLDOVER
FUNCTION WAITS FOR THE PLL TO SETTLE AND LOCK
BEFORE THE HOLDOVER FUNCTION CAN BE
RETRIGGERED.
在保持模式下,只要不存在参考时钟,电荷泵就一直处于
高阻态。
像在外部保持模式下一样,B计数器(位于N分频器中)在电
荷泵因参考路径PFD事件而离开高阻态的同时复位,这有
助于对齐R和N分频器的边沿,使PLL更快建立,并降低建
立期间的频率误差。由于预分频器未复位,因此当B数与R
数接近时,该功能效果最佳,此时环路要消除的相位差较
小。
7213-069
Rev. 0 | Page 40 of 84

AD9520-0
离开保持模式后,环路重新获取锁定,LD引脚必须充电(如
果0x01D[3] = 1),它才能重新进入保持模式(电荷泵高阻态)。
保持功能总是响应当前选定参考的状态(0x01C)。如果环路
在参考切换期间失锁(参见“参考切换”部分),则保持模式会
被短暂触发,直到PFD的下一个参考时钟沿。
下列寄存器会影响自动/内部保持功能:
• 0x018[6:5]—锁定检测计数器。该寄存器改变所需的边沿
在锁定检测窗口内的连续PFD周期数,只有经过该数量
的PFD周期后,DLD指示器才会指示锁定。这会影响LD
引脚开始充电的时间,以及从保持事件结束到保持功能
重新激活的延迟。
• 0x018[3]—禁用数字锁定检测。要使能DLD电路,必须
将此位设为0。如果DLD功能未使能,则内部/自动保持
模式不能正常工作。
• 0x01A[5:0]—锁定检测引脚控制。使用LD引脚比较器
时,该寄存器设为000100b可将锁定检测引脚置于电流源
锁定检测模式。LD引脚应加载一个适当大小的电容。
• 0x01D[3]—LD引脚比较器使能。1 = 使能,0 = 禁用。禁
用时,保持功能始终检测到LD引脚为高电平。
• 0x01D[1]—外部保持控制。
• 0x01D[0]—使能保持并忽略参考频率状态。如果禁用保
持,则外部和自动/内部保持均被禁用。
• 自动参考切换,优先使用REF1。
• 数字锁定检测:5个PFD周期,高范围窗口。
• 使用LD引脚比较器的自动保持。
设置下列寄存器(除一般PLL寄存器以外):
• 0x018[6:5] = 00b;锁定检测计数器 = 5个周期。
• 0x018[4] = 0b;数字锁定检测窗口 = 高范围。
• 0x018[3] = 1b;禁用DLD正常操作。
• 0x01A[5:0] = 000100b;将LD引脚控制设为电流源锁定检
测模式。
• 0x01C[4] = 1b;使能自动切换。
• 0x01C[3] = 0b;优先使用REF1。
• 0x01C[2:1] = 11b;使能REF1和REF2输入缓冲器。
• 0x01D[3] = 1b;使能LD引脚比较器。
• 0x01D[1] = 0b;禁用外部保持模式,使用自动/内部保持
模式。
• 0x01D[0] = 1b;使能保持。
频率状态监控器
AD9520包括三个频率状态监控器,用于指示PLL参考(或单
端模式下的参考)和VCO是否降到阈值频率以下。图47显示
了它们在PLL中的位置。
在下例中,自动保持模式配置如下:
REF_SEL CPRSET VCPVS GND RSET
REFERENCE
SWITCHOVER
REF1
STATUS
STATUS
BUF
OPTIONAL
BYPASS
REFIN
REFIN
CLK
CLK
REF2
REGULATOR (LDO)
LF
LOW DROPOUT
CLOCK
DOUBLER
VCO STATUS
P, P + 1
PRESCALER
N DIVIDER
ZERO DELAY BLOCK
DIVIDE BY 1,
2, 3, 4, 5, OR 6
0 1
PLL参考监控器具有两个阈值频率:正常和扩展(见表17)。
参考频率监控阈值通过0x01F选择。
REFMON
DISTRIBUTION
REFERENCE
R
DIVIDER
A/B
COUNTERS
图47. 参考和VCO状态监控器
PROGRAMMABLE
N DELAY
FROM CHANNEL
DIVIDER 0
LOCK
DETECT
R DELAY
PROGRAMMABLE
PHASE
FREQUENCY
DETECTOR
PLL
REFERENCE
CHARGE
HOLD
PUMP
LD
CP
STATUS
VS_DRV
07213-070
Rev. 0 | Page 41 of 84

AD9520-0
VCO校准
为确保AD9520能在整个工艺和温度范围内正常工作,必须
校准片内VCO。VCO校准由一个采用REFIN分频时钟工作
的校准控制器控制。校准要求正确设置PLL以便锁定PLL环
路,并且REFIN时钟存在。REFIN时钟必须来自AD9520外
部的一个稳定时钟源。
VCO校准方式有两种:上电时自动执行和手动执行。当
EEPROM被设置为自动加载EEPROM中的预编程值时,
VCO校准将自动执行。为使自动校准成功完成,上电时必
须提供一个有效参考。如果没有,用户必须手动校准
VCO。
在AD9520上电或复位后的首次初始化期间,设置0x018[0]
= 1b将启动手动VCO校准序列。这可以作为执行更新寄存
器(0x232[0] = 1b)之前的初始设置的一部分来完成。初始设
置完成后,就会启动VCO校准序列:复位0x018[0] = 0b,执
行一个更新寄存器操作,设置0x018[0] = 1b,再执行一个更
新寄存器操作。一个回读位(0x01F[6])通过返回逻辑真值
(即1b),指示VCO校准已完成。
VCO校准的操作顺序如下:
1. 将PLL寄存器编程为PLL环路所需的正确值。注意,在
VCO校准期间,VCO分频器(0x1E0[2:0])不得被设置为静
态。
2. 在上电或复位后的寄存器初始设置期间,设置0x018[0] =
1b将启动VCO校准。然后,只要需要校准,就应设置
0x018[0] = 0b,更新寄存器,然后设置0x018[0] = 1b,更新
寄存器。
3. 内部启动SYNC操作,使输出进入正常SYNC功能操作决
定的静止状态。
4. VCO校准到请求的VCO频率所需的设置。
5. 内部释放SYNC信号,使输出继续提供时钟。
6. PLL环路闭合。
7. PLL锁定。
VCO校准期间会执行SYNC,因此,AD9520的输出在校准
期间保持静态,防止产生不需要的频率。然而,在VCO校
准结束时,输出可能在PLL环路完全建立之前就恢复提供
时钟。
校准分频器将PFD频率(参考频率除以R)降频至校准时钟。
校准频率等于PFD频率除以校准分频器设置。VCO校准时
钟频率越低,则完成校准所需的时间越长。
VCO校准时钟频率的计算公式如下:
f
CAL_CLOCK
= f
REFIN
/(R × cal_div)
其中:
为REFIN信号的频率。
f
REFIN
R为R计数器的值。
cal_div为VCO校准分频器设置的分频比(0x018[2:1])。
用户应选择适当的校准分频比,使得校准频率小于6.25
MHz。表30给出了适当的校准分频值。
表30. 不同鉴相器频率下的VCO校准分频值
PFD速率(MHz) 推荐的VCO校准分频值
<12 任意
12至25 4, 8, 16
25至50 8, 16
50至100 16
VCO校准需要4400个校准时钟周期,因此,用PLL参考时
钟周期表示的VCO校准时间为:
VCO校准时间 = 4400 × R × cal_div(PLL参考时钟周期)
当PLL设置改变时,AD9520不会自动重新校准VCO,这使
得用户能够灵活地决定以何种顺序设置寄存器,以及何时
启动校准,而不是只要某些PLL寄存器的值发生变化,就
会执行校准。例如,可以少量改变VCO频率,而不必执行
自动校准,但这样做应谨慎,用户必须知道VCO控制电压
不会超过标称最佳性能限值,数百kHz的步进是可行的,
但数MHz可能不行。此外,校准程序会导致VCO频率迅速
改变,因此分配部分自动进入SYNC状态,直到校准完成为
止。所以,必须认识到输出会暂时丢失。
下列情况下应启动VCO校准:
• 更改PLL R、P、B、A分频器设置或者PLL参考时钟频率
改变之后。这实际上是指PLL寄存器或参考时钟
改 ,导致VCO频率改变。
• 需要进行系统校准时。VCO能够在极端温度下正常工
作,即使首次校准是在相反的极端温度下进行。然而,如
有需要,可以随时启动VCO校准。
VCO校准时钟分频器的设置如表53所示(0x018[2:1])。
Rev. 0 | Page 42 of 84

AD9520-0
REFIN/
REFIN
CLK/CLK
R
DIVIDERRDELAY
N
DIVIDERNDELAY
REG 0x01E[1] = 1
MUX1
LF
ZERO DELAY FEEDBACK CLOCK
DIVIDE BY 1,
2, 3, 4, 5, OR 6
0 1
PFD CP
INTERNAL FEEDBACK PATH
EXTERNAL FEEDBACK PATH
MUX3
REG 0x01E[0]
ZERO DELAY
CHANNEL DIVIDER 0
CHANNEL DIVIDER 1
CHANNEL DIVIDER 2
CHANNEL DIVIDER 3
AD9520
LOOP
FILTER
OUT0 TO OUT2
OUT3 TO OUT5
OUT6 TO OUT8
OUT9 TO OUT11
7213-053
图48. 零延迟功能
零延迟操作
零延迟操作能够使输出时钟的相位与外部PLL参考输入的
相位对齐。AD9520有两种零延迟模式:内部和外部。
内部零延迟模式
AD9520的内部零延迟功能是通过将通道分频器0的输出反
馈至PLL N分频器来实现的。图48中,内部零延迟模式的信
号路由变化如蓝色线所示。
内部零延迟模式通过设置寄存器0x01E[2:1] = 01b进行选择。
在默认内部零延迟模式下,通道分频器0的输出通过Mux3
和Mux1(图48蓝色线所示的反馈路径)返回PLL(N分频器)。
PLL使通道分频器0的输出相位/边沿与参考输入的相位/边
沿同步。用户也可以通过更改寄存器0x01E[4:3]的值,指定
通道分频器1、通道分频器2或通道分频器3为零延迟反馈。
由于通道分频器彼此同步,因此通道分频器的输出与参考
输入同步。PLL内的R延迟和N延迟均可以用来补偿输出驱
动器和PLL元件的传播延迟,使得时钟输出与参考输入之
间的相位偏移最小,从而实现零延迟。
外部零延迟模式
AD9520的外部零延迟功能是通过将一路时钟输出反馈至
CLK输入,最终回到PLL N分频器来实现的。图48中,外部
零延迟模式的信号路由变化如红色线所示。
外部零延迟模式通过设置0x01E[2:1] = 11进行选择。在外部
零延迟模式下,12路输出时钟(OUT0至OUT11)中的一路可
以通过CLK/CLK引脚,以及通过Mux3和Mux1返回PLL(N分
频器)。反馈路径如图48中的红色线所示。
PLL使反馈输出时钟的相位/边沿与参考输入的相位/边沿同
步。由于通道分频器彼此同步,因此时钟输出与参考输入
同步。PLL内的R延迟和N延迟均可以用来补偿PLL元件的
传播延迟,使得反馈时钟与参考输入之间的相位偏移最
小。
Rev. 0 | Page 43 of 84

AD9520-0
LF
CLK
CLK
DISTRIBUTION
MODE 0 (INTERNAL VCO MODE)
PLL
DIVIDE BY 1,
2, 3, 4, 5, OR 6
0 1
CLOCK
CLOCK
DISTRIBUTION
LF
CLK
CLK
MODE 1 (CLOCK DISTRIBUTION MODE)
图49. 三种时钟分配工作模式的简图
时钟分配
一个时钟通道由共享一个分频器的三路LVPECL时钟输出或
六路CMOS时钟输出组成。一路时钟输出包括多个驱动
器,这些驱动器连接到多个输出引脚。时钟输出引脚提供
LVPECL或CMOS输出。
AD9520有四个时钟通道,每个通道都有自己的可编程分频
器,以便对施加于输入端的时钟频率进行分频。通道分频
器可以在1到32范围内进行整数分频。
DIVIDE BY 1,
2, 3, 4, 5, OR 6
0 1
DISTRIBUTION
CLOCK
PLL
CLOCK
DISTRI-
BUTION
LF
CLK
CLK
DISTRIBUTION
MODE 2 (HF CLOCK DISTRIBUTION MODE)
PLL
DIVIDE BY 1,
2, 3, 4, 5, OR 6
0 1
CLOCK
工作模式
时钟分配有三种工作模式,如图49所示。其中一种模式使
用内部VCO,另外两种模式则旁路内部VCO并使用
CLK/CLK引脚提供的信号。
在模式0(内部VCO模式)下,有两条信号路径可用。在第一
条路径中,VCO信号被送至VCO分频器,然后输入各通道
分频器。在第二条路径中,用户旁路VCO和通道分频器,
将VCO信号直接送至驱动器。
CLOCK
DISTRI-
BUTION
07213-054
AD9520有一个VCO分频器,它对VCO输出进行1、2、3、
4、5或6分频,然后输入各通道分频器。VCO分频器有两方
面作用。一是将通道分频器的最大输入频率限制在1.6
GHz;二是让AD9520仅利用一个简单的后置分频器就能产
生非常低的频率。连接到CLK输入的外部时钟信号也可以
使用VCO分频器。
根据当前设定的分频比,通道分频器支持多种占空比选
择。也就是说,对于任何特定的分频比D,分频器的输出
可以在N + 1个输入时钟周期内设为高电平,在M + 1个输入
时钟周期内设为低电平(其中D = N + M + 2)。例如,5分频
输出可以在一个分频器输入周期内为高电平,在四个周期
内为低电平,或者在三个周期内为高电平,在两个周期内
为低电平。当然还有其它可能的组合。
通道分频器包括一个占空比校正功能,可以禁用该功能。
与上述可选占空比相比,该功能可以校正奇数分频引起的
非50%占空比,但它要求分频比按照M = N + 1进行设置。
此外,通道分频器支持设置粗调相位偏移或延迟。根据所
选的分频比,输出最多可以延迟15个输入时钟周期。例
如,如果通道分频器的输入频率为1 GHz,则通道分频器输
出最多可以延迟15 ns。分频器输出还可以设置为以高电平
或以低电平启动。
选择CLK为时钟源时,如果CLK频率小于通道分频器最大
输入频率(1600 MHz),则不必使用VCO分频器,否则就必须
使用VCO分频器以降低输入通道分频器的频率。
表31说明了如何选择VCO、CLK和VCO分频器。0x1E1[1:0]
选择通道分频器时钟源,并决定是否使用VCO分频器。无
法选择VCO而不使用VCO分频器。
表31. 工作模式
0x1E1
模式 [1] [0] 通道分频器时钟源 VCO分频器
2 0 0 CLK 使用
1 0 1 CLK 不用
0 1 0 VCO 使用
1 1 不允许 不允许
CLK或VCO直接至LVPECL输出
可以将内部VCO或CLK(被选为VCO分频器输入的时钟源)
直接连接到LVPECL输出。这种配置可以将高达VCO最高频
率的频率直接送至LVPECL输出端。然而,在最高频率时,
LVPECL输出可能无法满足表4中的V
要求。
OD
Rev. 0 | Page 44 of 84

可以选择内部VCO或CLK作为直接至输出信号路由的时钟
源。要将LVPECL输出直接连接到内部VCO或CLK,用户必
须选择VCO分频器作为分配部分的来源,无论有无通道使
用它。
表32. 直接将VCO分频器输入路由至输出
寄存器设置 选择
0x1E1[1:0] = 00b CLK为时钟源;选择VCO分频器
0x1E1[1:0] = 10b VCO为时钟源;选择VCO分频器
0x192[1] = 1b 直接至输出OUT0、OUT1、OUT2
0x195[1] = 1b 直接至输出OUT3、OUT4、OUT5
0x198[1] = 1b 直接至输出OUT6、OUT7、OUT8
0x19B[1] = 1b 直接至输出OUT9、OUT10、OUT11
时钟分频
总分频比由VCO分频器(使用时)和通道分频器组合而成。
使用VCO分频器时,从VCO或CLK到输出的总分频比为
VCO分频比(1、2、3、4、5和6)与通道分频比的乘积。表
33说明了一个通道的分频比是如何设置的。
表33. 分频比
选择CLK或
VCO
CLK或VCO
输入
CLK或VCO
输入
CLK或VCO
输入
CLK或VCO
输入
CLK
CLK(内部
VCO关闭)
CLK(内部
VCO关闭)
1
旁路VCO分频器(0x1E1[0] = 1)不同于VCO分频比 = 1。
馈入输出驱动器的通道分频器包括一个2至32分频器,该分
频器提供1至32分频,1分频是通过旁路分频器实现的。这
些分频器还提供可编程占空比,当分频比为奇数时,可以
使用占空比校正功能。相位偏移或延迟可以输入时钟周期
为增量进行选择。通道分频器的输入信号频率最高可达
1600 MHz。分频器的特性和设置通过设置适当的设置和控
制寄存器进行选择(见表49至表60)。
VCO分频
器设置
1至6
1至6 2至32 禁用
2至6 旁路 禁用 (2至6) × (1)
1 旁路 禁用
旁路VCO
分频器
旁路VCO
分频器
1
通道分频
器设置
无关
旁路
2至32
直接至输
出设置
使能 1
无关
无关
最终分频比
(1至6) × (2至32)
输出静态
(无效状态)
1
2至32
AD9520-0
VCO分频器
VCO分频器提供内部VCO或外部CLK输入与时钟分配通道
分频器之间的分频功能,分频比可以设置为1、2、3、4、5
或6(见表56的0x1E0[2:0])。然而,当VCO分频比设为1时,
任何一个通道输出分频器都无法旁路。
也可以将VCO分频器设置为静态,这在唯一需要的输出频
率就是VCO频率的应用中很有用。将VCO分频器设置为静
态可以提高宽带无杂散动态范围(SFDR)。如果VCO分频器
在VCO校准期间为静态,则不会有输出信号。因此,建议
用户在VCO校准期间将VCO分频器设置为非静态,然后在
VCO校准完成后,将VCO分频器设置为静态。
为实现同样的SFDR性能,推荐的替代方案是将VCO分频比
设置为1并使能VCO直接模式,这使得用户能够用所需的值
设置EEPROM,并且在VCO校准完成后无需采取进一步措
施。
通道分频器
三路LVPECL输出组成一组,每组输出由一个通道分频器驱
动,共有4个通道分频器(0、1、2和3)驱动12路LVPECL输出
(OUT0至OUT11)。表34列出了用于设置这些分频器的分频
比和其它功能的寄存器位置。分频比由M和N的值设置。
将旁路位置1可以旁路分频器(相当于1分频,分频器电路关
断)。根据禁用分频器DCC位的设置,可以使能或禁用占空
比校正功能。
表34. 输出分频器的设置D
分频器 低周期M 高周期N 旁路
0 0x190[7:4] 0x190[3:0] 0x191[7] 0x192[0]
1 0x193[7:4] 0x193[3:0] 0x194[7] 0x195[0]
2 0x196[7:4] 0x196[3:0] 0x197[7] 0x198[0]
3 0x199[7:4] 0x199[3:0] 0x19A[7] 0x19B[0]
通道分频(0、1、2和3)
对于每个通道(通道号x为0、1、2或3),分频比DX由M和N
的值(每个值有4位,代表十进制0到15)设置,其中:
Number of Low Cycles = M + 1
Number of High Cycles = N + 1
高电平和低电平周期数是指当前送至通道分频器输入端的
时钟信号(VCO分频器输出或CLK)的周期数。
当分频器被旁路时,D
其它情况下,DX =(N + 1)+(M + 1) = N + M + 2。因此,各通
道分频器的分频比可以是1到32范围内的任何整数。
X
= 1。
X
禁用分频
器DCC
Rev. 0 | Page 45 of 84

AD9520-0
占空比和占空比校正
通道输出端时钟信号的占空比是下列某些或全部条件的
结果:
• 通道的M和N值
• DCC使能/禁用
• VCO分频器使能/旁路
• CLK输入占空比(注意内部VCO具有50%的占空比)
各通道分频器的DCC功能默认使能。然而,通过将各通道
的禁用分频器DCC位置1,可以独立禁用各通道的DCC功
能。
通道分频器的某些M和N值会导致占空比不是50%。对于偶
数分频,如果M ≠ N,则也可能产生非50%的占空比。占空
比校正功能自动将通道分频器输出的非50%占空比校正为
50%占空比。
占空比校正需要下列通道分频器条件:
• 偶数分频必须设置为M = N
• 奇数分频必须设置为M = N + 1
当未旁路或未被DCC功能校正时,各通道分频器输出的占
空比为用百分数表示的数值(N + 1)/(N + M + 2)。
不同配置下通道分频器输出的占空比如表35至表38所示。
表35. 通道分频器输出占空比:VCO分频比 ≠ 1、
输入占空比为50%
D
输出占空比
X
VCO
分频器
偶数
奇数 = 3
奇数 = 5
偶数、奇数
偶数、奇数
N + M + 2 禁用分频器DCC = 1
旁路通道
分频器
旁路通道
分频器
旁路通道
分频器
偶数 (N + 1)/(N + M + 2)
奇数 (N + 1)/(N + M + 2)
50% 50%
33.3% 50%
40% 50%
禁用分频器
DCC = 0
50%,要求
M = N
50%,要求
M = N + 1
表36. 通道分频器输出占空比:VCO分频比 ≠ 1、
输入占空比为X%
D
输出占空比
X
VCO
分频器
偶数
奇数 = 3
奇数 = 5
偶数 偶数
偶数 奇数
奇数 = 3 偶数
奇数 = 3 奇数
奇数 = 5 偶数
奇数 = 5 奇数
N + M + 2
旁路通道
分频器
旁路通道
分频器
旁路通道
分频器
禁用分频器
DCC = 1
50% 50%
33.3% (1 + X%)/3
40% (2 + X%)/5
(N + 1)/
(N + M + 2)
(N + 1)/
(N + M + 2)
(N + 1)/
(N + M + 2)
(N + 1)/
(N + M + 2)
(N + 1)/
(N + M + 2)
(N + 1)/
(N + M + 2)
禁用分频器DCC = 0
50%,要求M = N
50%,要求M = N + 1
50%,要求M = N
(3N + 4 + X%)/(6N + 9),
要求M = N + 1
50%,要求M = N
(5N + 7 + X%)/(10N + 15),
要求M = N + 1
表37. 通道分频器输出占空比:VCO分频器使能并且置1
输出占空比
D
X
输入时钟
占空比
任意 偶数
50% 奇数
X% 奇数
N + M + 2
禁用分频器
DCC = 1
(N + 1)/
(M + N + 2)
(N + 1)/
(M + N + 2)
(N + 1)/
(M + N + 2)
禁用分频器DCC = 0
50%,要求M = N
50%,要求M = N + 1
(N + 1 + X%)/(2 × N + 3),
要求M = N + 1
注意:当VCO分频比 = 1时,必须使能通道分频器。
表38. 通道分频器输出占空比:旁路VCO分频器
D
输出占空比
X
输入时钟
占空比
任意
任意 偶数
50% 奇数
X% 奇数
N + M + 2
旁路通道
分频器
禁用分频器
DCC = 1
同输入占空比 同输入占空比
(N + 1)/
(M + N + 2)
(N + 1)/
(M + N + 2)
(N + 1)/
(M + N + 2)
禁用分频器DCC = 0
50%,要求M = N
50%,要求M = N + 1
(N + 1 + X%)/(2 × N + 3),
要求M = N + 1
Rev. 0 | Page 46 of 84

AD9520-0
内部VCO的占空比为50%。因此,当VCO直接连接到输出
端时,占空比为50%。如果CLK输入直接路由到输出端,
则输出占空比与CLK输入相同。
相位偏移或粗调时间延迟
通过设置寄存器位(见表39),可以设置各通道分频器的相
位偏移或粗调时间延迟。这些设置决定通道分频器输出的
上升沿偏移或延迟的时间,该时间用通道分频器输入频率
的周期数(连续上升沿)表示。这一延迟是相对于无延迟的
输出(即相位偏移为0)而言,延迟量由载入相位偏移(PO)寄
存器的5位加上各通道分频器的高电平启动(SH)位设置。当
高电平启动位置1时,延迟还受分频器的低电平周期数(M)
影响。
为使相位偏移有效,必须使用SYNC功能(参见“同步输出—
SYNC功能”部分)。
表39. 设置相位偏移和分频比
分频器
高电平启
动(SH)
相位偏移
(PO)
低周期M 高周期N
0 0x191[4] 0x191[3:0] 0x190[7:4] 0x190[3:0]
1 0x194[4] 0x194[3:0] 0x193[7:4] 0x193[3:0]
2 0x197[4] 0x197[3:0] 0x196[7:4] 0x196[3:0]
3 0x19A[4] 0x19A[3:0] 0x199[7:4] 0x199[3:0]
令
= 延迟(秒)
Δ
t
= 延迟(DX输入时钟信号的周期数)
Δ
c
= 分频器DX的输入时钟信号的周期(秒)
T
X
Φ = 16 × SH[4] + 8 × PO[3] + 4 × PO[2] + 2 × PO[1] + 1 × PO[0]
CHANNEL
DIVIDER INPUT
DIVIDER 0
DIVIDER 1
DIVIDER 2
0 1 2 3 456 7 8 9 10 11 12 13 14 15
Tx
CHANNEL DIVIDER OUTPUTS
SH = 0
PO = 0
SH = 0
PO = 1
SH = 0
PO = 2
图50. 粗调相位偏移(或延迟)的效果
DIV = 4, DUTY = 50%
1 × Tx
2 × Tx
同步输出—SYNC功能
AD9520的时钟输出可以彼此同步。如果某路输出不需要同
步,可以将其从同步中排除。要想同步,必须按照预设的
一组静态条件设置未排除的输出,这些条件包括给定通道
分频器的分频比和相位偏移。这样,用户就能为各通道分
频器指定不同的分频比和相位偏移。释放SYNC引脚后,输
出可以继续在预设条件下提供时钟。
输出同步可以通过多种方式执行:
• 将SYNC引脚拉低,然后释放(手动同步)。
• 设置然后复位以下三位中的任何一位:软SYNC(0x230
[0])、软复位位(0x000[5][镜像])和关断分配参考(0x230
[1])。
• 输出同步可以作为芯片上电序列的一部分来执行。
• 将RESET引脚拉低,然后释放(芯片复位)。
• 将PD引脚拉低,然后释放(芯片关断)。
07213-071
通道分频比设置为:N = 高电平周期数,M = 低电平周期数。
第一种情况
当 Φ ≤ 15,
Δ
= Φ × TX
t
Δ
= Δt/TX = Φ
c
第二种情况
当 Φ ≥ 16,
Δ
= (Φ − 16 + M + 1) × T
t
X
Δc = Δt/TX
通过为各分频器指定不同的相位偏移,便可设置以通道分
频器输入时钟周期为增量的输出间延迟。图50显示了设置
这样一种输出间粗调偏移的结果。
Rev. 0 | Page 47 of 84
• 每当校准VCO时,内部SYNC信号都会在校准开始时自
动置位,然后在校准完成时释放。
执行SYNC功能的最常见方式是使用SYNC引脚手动同步输
出,这要求在SYNC引脚上提供一个趋低信号,它保持低电
平,然后在需要同步时释放。SYNC操作的时序如图51(使
用VCO分频器)和图52(不使用VCO分频器)所示。由于
SYNC信号相对于AD9520内部时钟沿的异步特性,通道分
频器的输入存在最多1个时钟周期的不确定性。

S
R
R
AD9520-0
从SYNC上升沿到同步输出时钟开始的流水线延迟等于14到
15个通道分频器输入时钟周期加上1个VCO分频器输入周期
(见图51),或者加上一个通道分频器输入周期(见图52),具
体取决于是否使用VCO分频器。周期数从信号的上升沿开
始计数。此外还有从SYNC信号到内部同步逻辑的1.2 ns(典型
值)延迟,以及输出驱动器的传播延迟。对于LVPECL驱动
器,传播延迟约为100 ps;对于CMOS驱动器,传播延迟约
为1.5 ns。
执行SYNC功能的另一个常见方式是设置然后复位软SYNC
位(0x230[0])。设置和复位软SYNC位均要求执行更新所有
寄存器(0x232[0] = 1b)操作。
SYNC操作首先将所有未被排除(通过忽略SYNC位)的输出
设为预设状况,然后才允许输出开始同步提供时钟。预设
状况考虑到了各通道高电平启动位和相位偏移的设置,这
些设置既适用于SYNC操作正在进行时各路输出的静止状
态,也适用于SYNC操作完成后各路输出又开始提供时钟时
的状态和相对相位。在输出之间和同步之后,可以设置相
位偏移。
AD9520的差分LVPECL输出三路一组,共分四组,各组共
享一个通道分频器。对于CMOS输出,各LVPECL差分对可
以配置为2路单端CMOS输出。同步条件适用于所有属于同
一通道分频器的驱动器。
通过将通道的忽略SYNC位置1,可以将各通道(分频器及其
输出)从SYNC操作中排除。设置忽略SYNC的通道(排除在
外的通道)在SYNC操作期间不会将其输出设为静态,而且
其输出不与包括在内的通道的输出同步。
CHANNEL DIVIDE
OUTPUT CLOCKING
INPUT TO VCO DIVIDER
INPUT TO CHANNEL DIVIDER
YNC PIN
OUTPUT OF
CHANNEL DIVIDER
CHANNEL DIVIDER
OUTPUT CLOCKING
INPUT TO CLK
INPUT TO CHANNEL DIVIDER
CHANNEL DIVIDER OUTPUT STATIC
1 2 3 4 5 6 7
14 TO 15 CYCLES AT CHANNEL DIVIDER INPUT + 1 CYCLE AT VCO DIVIDER INPUT
9 10
8
11
12
图51. 使用VCO分频器时的SYNC时序流水线延迟(CLK或VCO为输入)
CHANNEL DIVIDER OUTPUT STATIC
1 2 3 4 5 6 7
9 10
8
11
13 14
12
13 14
CHANNEL DIVIDE
OUTPUT CLOCKING
1
CHANNEL DIVIDE
OUTPUT CLOCKING
1
07213-073
R
SYNC PIN
OUTPUT OF
CHANNEL DIVIDER
14 TO 15 CYCLES AT CHANNEL DIVIDER INPUT + 1 CYCLE AT CLK INPUT
07213-074
图52. 不使用VCO分频器时的SYNC时序流水线延迟(仅CLK为输入)
Rev. 0 | Page 48 of 84

V
LVPECL输出驱动器
LVPECL差分电压(V
行选择,参见寄存器0x0F0至寄存器0x0FB的位1和位2。
LVPECL输出具有专用电源引脚(VS_DRV),允许使用独立
的电源。VS_DRV的范围为2.5 V至3.3 V。
LVPECL输出极性可以设置为同相或反相,在应用中,无需
更改电路板布局便可调整输出的相对极性。各路LVPECL输
出可以根据需要关断或上电。LVPECL输出级的架构导致它
在某些关断条件下可能会发生电气过应力和击穿问题。
因此,LVPECL输出有两种关断模式:完全关断和安全关
断。
在完全关断模式下,所有输出驱动器同时关闭。如果输出
引脚上存在一个外部电压偏置网络(如戴维宁等效终端
等),则不得使用这种模式,因为它会导致关断的输出上出
现直流电压。然而,当LVPECL驱动器仅采用下拉电阻端接
时,则可以使用完全关断模式。设置0x230[1] = 1可激活完
全关断模式。
主要关断模式是安全关断模式。在关断期间,这种模式仍
能继续保护输出器件。激活安全关断模式有三种方法:将
各驱动器的关断位置1;独立关断各输出通道(属于该通道
的所有驱动器自动关断);以及激活休眠模式。
SW1B SW1A
R2
200ΩR1200Ω
图53. 简化的LVPECL输出等效电路
)可在约400 mV到960 mV的范围内进
OD
N1
N2
SW2
4.4mA
QN1
OUT
QN2
OUT
07213-058
AD9520-0
CMOS输出驱动器
用户可以将各路LVPECL输出配置为一对CMOS输出,该器
件最多可提供24路CMOS输出。当一路输出被配置为CMOS
输出时,CMOS输出A和CMOS输出B自动开启。对于给定
的差分对,CMOS输出A或输出B可以分别独立开启或关
闭。用户也可以选择CMOS输出的相对极性,设置反相和
同相的任意组合(参见寄存器0x0F0至寄存器0x0FB)。
用户可以根据需要关断各CMOS输出以省电。CMOS输出关
断由使能CMOS输出寄存器(0x0F0[6:5]至0x0FB[6:5])分别控
制。关断时,CMOS驱动器处于三态。
S_DRV
OUT1/
OUT1
07213-035
图54. CMOS等效输出电路
复位模式
AD9520可以通过上电复位(POR)和其它几种方式使芯片复
位。
上电复位
在芯片上电期间,当VS达到约2.6 V (<2.8 V)时,会发出一个
上电复位脉冲,将芯片复位到EEPROM中存储的设置
(EEPROM引脚 = 1)或片内设置(EEPROM引脚 = 0)。上电
时,AD9520还会执行SYNC操作,根据默认设置将输出的
相位对齐。内部产生上电复位脉冲信号后,大约需要70 ms
输出才会开始切换。
通过RESET引脚进行硬件复位
通过RESET引脚进行硬件复位(短暂拉低RESET可执行异步
硬复位),可以将芯片复位到EEPROM中存储的设置
(EEPROM引脚 = 1)或片内设置(EEPROM引脚 = 0)。硬复位
也会执行SYNC操作,根据默认设置将输出的相位对齐。当
EEPROM无效(EEPROM引脚 = 0)时,发出RESET后大约经
过2 μs输出就会开始切换。当EEPROM有效(EEPROM引脚 = 1)
时,拉高RESET后大约需要20 ms输出就会切换。
Rev. 0 | Page 49 of 84

AD9520-0
通过串行端口进行软复位
串行端口控制寄存器支持软复位,方法是将寄存器0x000的
位2和位5置1。当位5和位2置1时,芯片进入软复位模式,
恢复到EEPROM中的设置(EEPROM引脚 = 1) 或片内设置
(EEPROM引脚 = 0) ,寄存器0x000除外。这些位自动清0。
内部复位期间,输出保持静态。
• 在单端模式下,参考输入缓冲器关闭,直流偏置电路关
闭。
• 所有分频器均关闭。
• 所有CMOS输出处于三态。
• 所有LVPECL输出处于安全关断模式。
通过串行端口软复位到EEPROM中的设置(EEPROM引脚= 0时)
当EEPROM引脚 = 1时,通过0xB02[1]可以将芯片复位到
EEPROM中的设置。此位自动清0。当EEPROM引脚 = 0
时,此位不起任何作用。So_EEPROM寄存器清0后,大约
需要20 ms输出才会开始切换。
关断模式
通过PD关断芯片
通过拉低PD引脚,可以使AD9520进入关断状态,从而关
闭AD9520内部的大部分功能和电流。在重新拉高PD引脚
之前,芯片将一直处于关断状态。离开关断模式后,
AD9520返回到关断前其寄存器中的设置,除非在PD引脚
为低电平期间,寄存器被新设置更改。
关断芯片会关闭芯片上的电流,但保持LVPECL输出处于安
全关断模式所需的偏置电流除外。LVPECL偏置电流用于保
护LVPECL输出电路免受三态时某些终端和负载配置可能引
起的损害。由于这不是完全关断,因此可称之为休眠模
式。AD9520含有特殊电路,可防止芯片进入或退出休眠模
式时输出上出现不良脉冲。
当AD9520处于PD关断模式时,芯片的状态如下:
• PLL关闭(异步关断)
• VCO关闭
• CLK输入缓冲器关闭,但CLK输入直流偏置电路开启。
• 在差分模式下,参考输入缓冲器关闭,直流偏置电路
仍然开启。
• 串行控制端口有效,芯片可以响应命令。
PLL关断
AD9520的PLL部分可以选择性关断。PLL关断模式通过寄
存器0x010[1:0]设置,分为两种:异步关断和同步关断。
在异步关断模式下,寄存器一旦更新,器件就会关断。在
同步关断模式下,PLL关断受电荷泵控制,防止发生不需
要的跳频。寄存器更新后,器件在下一个电荷泵事件发生
时进入关断状态。
分配关断
通过写入0x230[1] = 1b以关闭分配部分的偏置电流,可以关
断分配部分。如果LVPECL关断模式为正常工作(0b),则
LVPECL输出上的低阻抗负载在关断期间可能会消耗相当大
的电流。如果LVPECL关断模式被设为1b,则LVPECL输出
不存在反向偏置保护,在某些终端条件下可能会受损。
各时钟输出独立关断
通过写入相应的寄存器,可以关断任意时钟分配输出,使
其进入安全关断模式。寄存器映射详细说明了各路输出的
关断设置,参见寄存器0x0F0[0]至寄存器0x0FD[0]。
各时钟通道独立关断
通过写入相应的寄存器,可以关断任意时钟分配通道。关
断一个时钟通道与关断一个驱动器相似,但前者更省电,
因为分频器也被关断。关断时钟通道还会自动关断与之相
连的驱动器。寄存器映射详细说明了各输出通道的关断设
置,参见寄存器0x192[2]、0x195[2]、0x198[2]和0x19B[2]。
Rev. 0 | Page 50 of 84

串行控制端口
AD9520串行控制端口是一种灵活的同步串行通信端口,可
以很方便地与多种工业标准微控制器和微处理器接口。该
2
端口兼容大多数同步传输格式,包括Philips I
®
和Intel® SSR协议。AD9520 I2C方案的两个规格与传统
SPI
I2C规格有差异,如本数据手册的表14所示。通过此串行控
制端口,可以对所有配置AD9520的寄存器进行读/写操
作。
SPI/I2C端口选择
AD9520有两个串行接口:SPI和I2C。用户可以选择SPI或
2
C,具体取决于三逻辑电平(高、开路、低)输入引脚SP1和SP0
I
的状态。当SP1和SP0均为高电平时,SPI接口使能。在其它
2
情况下,I
宽)设置,如表40所示。从机地址的4个 MSB是硬件编码
1011,3个LSB由SP1和SP0引脚编程。
C接口使能,它具有8个不同的I2C从机地址(7位
C、Motorola®
AD9520-0
I2C总线特性
2
表41. I
C总线定义
缩写 定义
S 起始
Sr 重复起始
P
A
A
W 写
R 读
对于所传输的每个数据位,都会在SCL时钟线上产生一个
脉冲。
SDA线上的数据在时钟的高电平期间不得改变。只有当SCL
线上的时钟为低电平时,数据线的状态才能改变。
停止
应答
不应答
表40. 串行端口模式选择
SP1 SP0 地址
低电平 Low I²C, 1011000
低电平 Open I²C, 1011001
低电平 High I²C, 1011010
开路 Low I²C, 1011011
开路 Open I²C, 1011100
开路 High I²C, 1011101
高电平 Low I²C, 1011110
高电平 Open I²C, 1011111
高电平 High SPI
I2C串行端口操作
AD9520 I2C端口基于I2C快速模式标准。AD9520支持两种
2
C协议:标准模式(100 kHz)和快速模式(400 kHz)。
I
AD9520 I2C端口是一个双线接口,由一条串行数据线(SDA)
2
和一条串行时钟线(SCL)构成。在I
C总线系统中,AD9520
作为从机连接到串行总线(数据总线SDA和时钟总线SCL),
这意味着AD9520不产生时钟。AD9520采用16位(两个字节)
直接存储器寻址,而不是传统的8位(一个字节)存储器寻
址。
SDA
SCL
DATA LINE
STABLE;
DATA VALID
CHANGE
OF DATA
ALLOWED
图55. 有效位传输
起始条件是SCL处于高电平时,SDA线上发生的高电平至低
电平跃迁。起始条件始终由主机产生,用于启动数据传
输。
停止条件是SCL处于高电平时,SDA线上发生的低电平至高
电平跃迁。停止条件始终由主机产生,用于结束数据传
输。
SDA
SCL
S
START
CONDITION
图56. 起始条件和停止条件
P
STOP
CONDITION
SDA线上的字节始终为8位长。每个字节之后必须跟随一个
应答位。字节以MSB优先方式发送。
7213-160
07213-161
应答位是附加到任何8位数据字节的第九个位。应答位始终
由接收器件(接收方)产生,用于通知发送方已收到该字
节。其实现方法是在每8位数据字节后的第9个时钟脉冲期
间拉低SDA线。
Rev. 0 | Page 51 of 84

SDA
AD9520-0
MSB
ACKNOWLEDGE FROM
SLAVE-RECEIVER
ACKNOWLEDGE FROM
SLAVE-RECEIVER
SCL
S
SDA MSB = 0
SCL
S
1 2 8 9 1 2 83 TO 73 TO 7 9 10
ACKNOWLEDGE FROM
SLAVE-RECEIVER
1 2 8 9 1 2 83 TO 73 TO 7 9 10
图58. 数据传输过程(主机写模式,使用2字节传输进行说明)
SDA
SCL
S
MSB = 1
ACKNOWLEDGE FROM
MASTER-RECEIVER
1 2 8 9 1 2 83 TO 73 TO 7 9 10
图59. 数据传输过程(主机读模式,使用2字节传输进行说明)
不应答位是附加到任何8位数据字节的第九个位。不应答位
始终由接收器件(接收方)产生,用于通知发送方未收到该
字节。其实现方法是在每8位数据字节后的第9个时钟脉冲
期间保持SDA线为高电平状态不变。
数据传输过程
主机通过置位起始条件来发起数据传输。这样,随后就会
2
发生数据流。连接到串行总线的所有I
C从机都会响应起始
条件。
然后,主机通过SDA线发送一个8位地址字节,它由7位从
机地址(MSB优先)和一个读写(R/W)位组成。读写位决定数
据传输的方向,即数据写入还是读取从机(0 = 写,1 = 读)。
地址与所发送地址对应的外设以一个应答位响应。在选定
器件等待读写数据期间,总线上的所有其它器件保持空闲
状态。如果R/W位为0,则主机(发送方)写入从机(接收方)。
如果R/W位为1,则主机(接收方)读取从机(发送方)。
这些命令的格式参见“数据传输格式”部分所述。
图57. 应答位
P
07213-162
ACKNOWLEDGE FROM
SLAVE-RECEIVER
P
07213-163
NO ACKNOWLEDGE
FROM
SLAVE-RECEIVER
P
07213-164
然后,主机(写入模式)或从机(读取模式)以9个时钟脉冲(8
位数据字节后跟1个来自接收器件的应答位)的格式通过串
行总线发送数据。每次传输能够发送的字节数不受限制。
在写入模式下,紧随从机地址字节之后的前两个数据字节
是内部存储器(控制寄存器)地址字节,高位字节地址优
16
先。这种寻址方案的存储器地址数量最多为2
− 1 = 65,535。
两个存储器地址字节之后的数据字节是写入控制寄存器的
寄存器数据。在读取模式下,从机地址字节之后的数据字
节是从控制寄存器读取的寄存器数据。
读取或写入所有数据字节之后,停止条件随即建立。在写
入模式下,主机(发送方)在从机(接收方)最后一个数据字节
的应答位之后的第10个时钟脉冲期间置位停止条件以结束
数据传输。在读取模式下,主机(接收方)接收从机(发送方)
最后一个数据字节,但在第9个时钟脉冲期间不拉低数据
线,这称为不应答位。接收到不应答位时,从机得知数据
传输已结束,从而释放SDA线。主机随后在第10个时钟脉
冲前的低电平期间拉低数据线,然后在第10个时钟脉冲期
间拉高数据线,以置位停止条件。
重复起始(Sr)条件可以代替停止条件。此外,起始或停止条
件可以随时发生,未完整传输的字节会被丢弃。
Rev. 0 | Page 52 of 84

AD9520-0
数据传输格式
发送字节格式——发送字节协议用于设置后续命令的寄存器地址。
S 从机地址 W A RAM地址高位字节 A RAM地址低位字节 A P
写入字节格式——写入字节协议用于将寄存器地址写入RAM,从指定RAM地址开始。 s.
S 从机地址 W A
RAM地址高位
字节
RAM地址低位
A
字节
A RAM数据0 A RAM数据1 A RAM数据2 A P
接收字节格式——接收字节协议用于从RAM读取数据字节,从当前地址开始。
A
S 从机地址 R A RAM数据0 A RAM数据1 A RAM数据2
读取字节格式——发送字节和接收字节的合并格式。
S 从机地址 W A
RAM地址高位
字节
RAM地址低位
A
字节
A Sr 从机地址 R A
RAM
数据0
RAM
A
数据1
A
RAM
数据2
A
I2C串行端口时序
SDA
SPIKE
t
RISE
t
IDLE
SCL
t
FALL
t
LOW
t
SET; DAT
t
RISE
t
FALL
t
HLD; STR
t
P
P
t
HLD; STR
S Sr P S
t
HLD; DAT
t
HIGH
2
表42. I
C时序定义
参数 描述
f
I2C时钟频率
I2C
t
停止与起始条件之间的总线空闲时间
IDLE
t
重复起始条件的保持时间
HLD; STR
t
重复起始条件的建立时间
SET; STR
t
停止条件的建立时间
SET; STP
t
数据保持时间
HLD; DAT
t
数据建立时间
SET; DAT
t
SCL时钟低电平持续时间
LOW
t
SCL时钟高电平持续时间
HIGH
t
SCL/SDA上升时间
RISE
t
SCL/SDA下降时间
FALL
t
输入滤波器必须抑制的电压尖峰脉冲宽度
SPIKE
t
SET; STR
图60. I2C串行端口时序
t
SET; STP
07213-165
Rev. 0 | Page 53 of 84

AD9520-0
SPI串行端口操作
引脚描述
SCLK(串行时钟)是串行移位时钟,此引脚为输入。SCLK用
来使串行控制端口的读写操作同步。写入数据位记录在该
时钟的上升沿,读出数据位记录在下降沿。此引脚由一个
30 kΩ电阻内部下拉至地。
SDIO(串行数据输入/输出)是一个两用引脚,既可以仅用作
输入(单向模式),也可以同时用作输入和输出(双向模式)。
AD9520默认采用双向I/O模式(0x000[7] = 0)。
SDO(串行数据输出)仅用于单向I/O模式(0x000[7]),作为回
读数据的独立输出引脚。
CS (片选引脚信号)是低电平有效控制,用来选通读写周
期。当CS为高电平时,SDO和SDIO处于高阻态。此引脚由
一个30 kΩ电阻内部上拉至VS。
15
CS
SCLK/SCL
SDIO/SDA
SDO
SPI工作模式
SPI模式支持单字节和多字节传输,以及MSB优先和LSB优
先传输格式。AD9520串行控制端口可以针对一个双向I/O
引脚(仅SDIO)或两个单向I/O引脚(SDIO/SDO)配置。
AD9520默认采用双向模式。它不支持短指令模式(8位指
令),仅支持长(16位)指令模式。
要启动对AD9520的写或读操作,须将CS拉低。
当传输三个或更少字节的数据(加上指令数据)时(见表43),
支持CS空闲高电平模式。在此模式中,CS引脚可以在任何
字节边界上暂时返回高电平,使系统控制器有时间处理下
一个字节。CS 仅可以在字节边界上进入高电平,但它可以
在传输的任一阶段(指令或数据)进入高电平。
在此期间,串行控制端口状态机进入等待状态,直到所有
数据发送完毕。如果数据尚未发送完毕,而系统控制器决
定中止传输,必须完成剩余传输,或者使CS返回低电平并
至少保持一个完整的SCLK周期(但少于8个SCLK周期),使
状态机复位。在非字节边界上拉高CS引脚将终止串行传输
并刷新缓冲器。
AD9520
16
SERIAL
17
CONTROL
PORT
18
图61. 串行控制端口
07213-036
在流模式中(见表43),可以连续流形式传输任意数量的数
据字节,寄存器地址自动递增或递减(见SPI MSB/LSB优先传
输部分)。在传输最后一个字节结束时,必须拉高CS,从而
结束流模式。
通信周期—指令加数据
AD9520的通信周期可分为两个部分。第一部分是在前16个
SCLK上升沿将一个16位指令字写入AD9520。该指令字向
AD9520串行控制端口提供有关数据传输(即通信周期的第
二部分)的信息,明确即将发生的数据传输是读操作还是写
操作,数据传输的字节数,以及数据传输中第一个字节的
起始寄存器地址。
写操作
如果指令字定义了一个写操作,则第二部分便是将数据传
输至AD9520的串行控制端口缓冲器。数据位记录在SCLK
的上升沿。
传输长度(1/2/3字节或流模式)由指令字节中的两位
(W1:W0)表示。当传输1、2或3字节(但不是流模式)时,在
每个8位序列之后可以拉高CS,使总线空闲,但最后一个
字节之后除外,此时会结束通信周期。当总线空闲时,如
果CS变为低电平,就会恢复串行传输。在非字节边界上拉
高CS引脚将复位串行控制端口。在写操作期间,流模式不
会跳过保留或空白寄存器;因此,用户必须知道向保留寄
存器写入何种位模式,以确保器件正常工作。对于空白寄
存器,无论写入何种数据都无关紧要。
由于数据是写入串行控制端口缓冲区,而不是直接写入
AD9520的实际控制寄存器,因此需要额外的操作来将串行
控制端口缓冲内容传输到AD9520的实际控制寄存器,从而
使其有效。更新寄存器操作包括设置0x232[0] = 1b(此位为
自清零位)。更新寄存器之前,可以改变任意字节的数据。
更新寄存器会同时激活上次更新以来所有已写入缓冲器的
寄存器变化。
读操作
AD9520仅支持长指令模式。如果指令字定义了一个读操
作,在接下来的N × 8个SCLK周期,数据从指令字所规定的
地址逐个输出,其中N为1至3,由W1:W0确定。如果N = 4,
读操作将为流模式,持续至CS变为高电平。流模式不会跳
过保留或空白寄存器。回读数据在SCLK的下降沿有效。
Rev. 0 | Page 54 of 84

AD9520串行控制端口的默认模式是双向模式。在双向模式
中,发送数据和回读数据均出现在SDIO引脚上。也可以将
AD9520设置为单向模式(0x000[7] = 1和0x000[0] = 1)。在单
向模式中,回读数据出现在SDO引脚上。
回读请求读取串行控制端口缓冲区或有效寄存器中的数据
(见图62)。对缓冲或有效寄存器的回读由0x004[0]控制。
AD9520使用寄存器地址0x000至0xB03。
图62. AD9520串行控制端口缓冲寄存器与有效寄存器之间
的关系
CS
SCLK/SCL
SDIO/SDA
SERIAL
SDO
CONTROL
PORT
WRITE REGISTER 0x232 = 0x001
TO UPDATE REGISTERS
图62. AD9520串行控制端口缓冲寄存器
与有效寄存器之间的关系
SPI指令字(16位)
指令字的MSB为R/W,表示该指令是读操作还是写操作。
接下来的两位(W1:W0)表示传输长度,单位为字节。最后
13位(A12:A0)是读或写操作的起始地址。
对于写操作,指令字之后是位[W1:W0]所代表的数据字节
数(见表43)。
表43. 字节传输计数
W1 W0 传输字节数
0 0 1
0
1 0 3
1 1 流模式
位[A12:A0]选择通信周期数据传输阶段写入或读取的寄存
器地址(寄存器映射范围内)。只需使用位[A9:A0]就能涵盖
AD9520所用的全部0x232寄存器。位[A12:A10]必须始终为
0b。对于多字节传输,此地址是起始字节地址。在MSB优
先模式中,后续字节会递增该地址。
1 2
UPDATE
REGISTERS
BUFFER REGISTERS
ACTIVE REGISTERS
07213-037
AD9520-0
SPI MSB/LSB优先传输
AD9520指令字和字节数据可以是MSB优先或LSB优先。写
入0x000的任何数据都必须进行镜像,高四位([7:4])必须与
低四位([3:0])构成镜像关系。这使得LSB优先或MSB优先事
实上是一样的。这种镜像的一个例子是寄存器0x000的默认
设置,它镜像第4位和第3位。这将设置长指令模式,它是
默认且唯一支持的模式。
AD9520的默认设置为MSB优先。
当0x000[1]和0x000[6]设置LSB优先时,它会立即生效,因
为这只影响串行控制端口的操作,而不需要执行更新。
当MSB优先模式有效时,指令和数据字节必须按照从MSB
到LSB的顺序写入。采用MSB优先格式的多字节数据传输由
一个包括高数据字节寄存器地址的指令字节开始。后续数
据字节必须按照从高地址到低地址的顺序传输。在MSB优
先模式下,多字节传输周期每传输一个数据字节,串行控
制端口的内部地址产生器便递减1。
当LSB优先模式有效时,指令和数据字节必须按照从LSB到
MSB的顺序写入。采用LSB优先格式的多字节数据传输由一
个包括低数据字节寄存器地址的指令字节开始,其后是多
个数据字节。在多字节传输周期中,每传输一个字节,串
行端口的内部字节地址产生器便递增1。
如果MSB优先模式有效(默认),AD9520串行控制端口的寄
存器地址将从刚才向控制寄存器0x000写入多字节I/O操作
的寄存器地址开始递减。如果LSB优先模式有效,串行控
制端口的寄存器地址将从刚才向控制寄存器0x232写入多字
节I/O操作的寄存器地址开始递增。
在流模式中,只要达到0x232,传输就会终止。请注意,在
多字节I/O操作期间,不会跳过不用的地址。
表44. 流模式(不跳过任何地址)
写入模式
LSB优先 递增 0x230、0x231、0x232、停止
MSB优先 递减 0x001、0x000、0x232、停止
地址方向 停止序列
表45. 串行控制端口,16位指令字,MSB优先
I15 I14 I13 I12 I11 I10 I9 I8 I7 I6 I5 I4 I3 I2 I1 I0
R/W
LSB
W1 W0 A12 = 0 A11 = 0 A10 = 0 A9 A8 A7 A6 A5 A4 A3 A2 A1 A0
Rev. 0 | Page 55 of 84

AD9520-0
CS
DON'T CARE
SCLK
DON'T CARE
DON'T CARE
SDIO A12W0W1R/W A11 A10 A9 A8 A7 A6 A5 A4 A3 A2 A1 A0 D7 D6 D5 D4 D3 D2 D1 D0 D7 D6 D5 D4 D3 D2 D1 D0
16-BIT INSTRUCTION HEADER REGISTER (N) DATA REGISTER (N – 1) DATA
表63. 串行控制端口写入:MSB优先,16位指令,双字节数据
CS
SCLK
DON'T CARE
SDIO
SDO
DON'T CARE
A121W 0WR/W A11A10 A9 A8 A7 A6 A5 A4 A3 A2 A1 A0
D7 D6 D5 D4 D3 D2 D1 D0 D7 D6 D5 D4 D3 D2 D1 D0 D7 D6 D5 D4 D3 D2 D1 D0 D7 D6 D5 D4 D3 D2 D1 D0
REGISTER (N) DATA16-BIT INSTRUCTION HEADER REGISTER (N – 1) DATA REGISTER (N – 2) DATA REGISTER (N – 3) DATA
表64. 串行控制端口读取:MSB优先,16位指令,4字节数据
t
HIGH
t
CLK
t
C
DON'T CARE
DON'T CARE
CS
SCLK
SDIO
DON'T CARE
DON'T CARE
t
DS
t
S
R/W
t
DH
t
LOW
W1 W0 A12 A11 A10 A9 A8 A7 A6 A5 D4 D3 D2 D1 D0
表65. 串行控制端口写入:MSB优先,16位指令,时序测量
CS
DON'T CARE
DON'T CARE
DON'T
CARE
07213-040
07213-038
07213-039
CS
SCLK
SDIO
DON'T CARE
DON'T CARE
SCLK
t
DV
SDIO
SDO
DATA BIT N – 1DATA BIT N
07213-041
图66. 串行控制端口寄存器读取时序图
A0 A1 A2 A3 A4 A5 A6 A7 A8 A9 A10 A11 A12 W/R 0D 1DW1W0 D2 D3 D4 D5 D6 D7 D0 D1 D2 D3 D4 D5 D6 D7
16-BIT INSTRUCTION HEADER REGISTER (N) DATA REGISTER (N + 1) DATA
表67. 串行控制端口写入:LSB优先,16位指令,双字节数据
DON'T CARE
DON'T CARE
07213-042
Rev. 0 | Page 56 of 84

AD9520-0
CS
SCLK
SDIO
表46. 串行控制端口时序
参数 描述
tDS
tDH
t
CLK
tS
tC
t
HIGH
t
LOW
t
DV
数据与SCLK上升沿之间的建立时间
数据与SCLK上升沿之间的保持时间
时钟周期
CS下降沿与SCLK上升沿之间的设置时间(通信周期开始)
SCLK上升沿与CS上升沿与之间的设置时间(通信周期结束)
SCLK应处于逻辑高电平状态的最短时间
SCLK应处于逻辑低电平状态的最短时间
SCLK至有效SDIO和SDO(见图66)
t
S
t
CLK
t
HIGH
t
DS
t
DH
BIT N BIT N + 1
t
LOW
t
C
07213-043
图68. 串行控制端口写操作时序
Rev. 0 | Page 57 of 84

AD9520-0
EEPROM操作
AD9520内置一个EEPROM(非易失性存储器)。用户可以对
EEPROM进行编程,以创建并在断电时存储用户自定义寄
存器设置文件。此设置文件可以用来提供上电和芯片复位
时的默认设置。EEPROM大小为512字节。
在数据传输过程中,一般无法通过串行端口访问写入和读
取寄存器,但有一个回读寄存器STATUS_EEPROM例外。
在SPI模式下,为了通过串行端口确定数据传输状态,用
户可以读取STATUS_EEPROM位的值(1表示进行中,0表
示已完成)。
2
在I
C模式下,用户可以通过外部I2C主机寻址AD9520从机
端口(向AD9520发送一个地址字节)。如果AD9520以不应
答位回应,则说明数据传输未完成。如果AD9520以应答位
回应,则说明数据传输过程已完成。用户可以监控
STATUS_EEPROM寄存器,或者设置STATUS引脚来监控
数据传输状态。
写入EEPROM
无法直接通过串行端口接口对EEPROM进行编程。要对
EEPROM进行编程并存储寄存器设置文件,请按照下述步
骤操作:
1. 将AD9520寄存器设置为所需的电路状态。如果用户希
望PLL在上电后自动锁定,则立即执行VCO校准位
(0x018[0])必须置1。这样,VCO校准就会在寄存器加载
后自动启动。注意,在VCO校准期间必须存在有效的
输入参考信号。
2. 如有必要,设置EEPROM缓冲寄存器(参见“EEPROM缓
冲段编程”部分)。
仅在下列情况下才需要执行此步骤:用户希望使用
EEPROM来控制AD9520一些(但不是全部)寄存器的默
认设置,或者用户希望在上电或芯片复位期间控制寄
存器设置更新序列。
3. 将使能EEPROM写入位(0xB02[0])置1,使能EEPROM。
回读寄存器STATUS_EEPROM (0xB00[0])用于指示EEPROM
与控制寄存器之间的数据传输状态(0表示已完成/无效;1
表示进行中/有效)。在数据传输开始时,EEPROM控制器
将 STATUS_EEPROM置 1,数据传输结束时清0。当
STATUS引脚被设置为监控STATUS_EEPROM位的状态
时,用户可以通过STATUS引脚访问STATUS_EEPROM。
或者,用户也可以监控STATUS_EEPROM位。
6. 数据传输过程完成后(0xB00[0] = 0),将使能EEPROM写
入寄存器(0xB02[0])清0,以禁用对EEPROM的写操作。
为验证数据传输已正确完成,用户可以检查0xB01[0]是否
为0。如果此寄存器的值为1,则说明数据传输发生错误。
读取EEPROM
下列复位相关事件可以启动将EEPROM中存储的设置恢复
到控制寄存器的过程。
当EEPROM引脚被拉高时,执行下列任一操作:
1. AD9520上电。
2. 将RESET引脚拉低后释放RESET,以执行硬件芯片复位。
3. 将自清零软复位位(0x000[5])置1。
当 EEPROM引脚被拉低时,将自清零So_EEPROM位
(0xB02[1])置1。AD9520随后便会启动对EEPROM的读操
作,并将读取值载入AD9520。
如果EEPROM引脚在复位或上电期间为低电平,则
EEPROM无效,AD9520转而加载默认值。
注意,如果使用EEPROM自动加载AD9520寄存器值并锁定
PLL,则在将寄存器值写入EEPROM时,立即执行VCO校
准位(0x018[0])必须置1。这样,VCO校准就会在寄存器加
载后自动启动。在VCO校准期间必须存在有效的输入参考
信号。
为验证数据传输已正确完成,用户可以检查0xB01[0]是否
为0。如果此寄存器的值为1,则说明数据传输发生错误。
4. 将REG2EEPROM位(0xB03[0])置1。
5. 将 IO_UPDATE位 (0x232[0])置1,启动写入数据到
EEPROM以创建EEPROM设置文件的过程。这样,
AD9520 EEPROM控制器将把当前寄存器值、存储器地
址和指令字节从EEPROM缓冲段传输到EEPROM。写
入过程完成后,内部控制器将0xB03[0]
(REG2EEPROM)重置为0。
Rev. 0 | Page 58 of 84

EEPROM缓冲段编程
EEPROM缓冲段是AD9520的一个寄存器空间,在EEPROM
编程期间,它允许用户指定将哪些寄存器组存储到
EEPROM。一般而言,用户无需对此段进行编程。
EEPROM缓冲段的上电默认值允许用户将寄存器0x000到寄
存器0x231的所有寄存器值存储到EEPROM。
例如,如果用户只想从EEPROM加载输出驱动器设置,而
不想触及AD9520中当前存储的PLL寄存器设置,则用户可
以修改EEPROM缓冲段,使其仅包括适用于输出驱动器的
寄存器,而排除适用于PLL配置的寄存器。
EEPROM缓冲段分为两个部分:寄存器段定义组和操作代
码。每个寄存器段定义组都包含起始地址和要写入
EEPROM的字节数。
如果AD9520寄存器映射从地址0x000到地址0x232是连续
的,则只会有一个寄存器段定义组,其起始地址为
0x000,长度为563字节。但是,事实并非如此。AD9520寄
存器映射不是连续的,而且EEPROM只有512字节长。因
此,寄存器段定义组告知EEPROM控制器AD9520寄存器映
射是如何分段的。
操作代码有三个:IO_UPDATE、 end-of-data和
pseudo-end-of-data。必须保证EEPROM缓冲段总是有一个
end-of-data或 pseudo-end-of-data操作代码,并且
IO_UPDATE操作代码至少在end-of-data操作代码之前出现
一次。
寄存器段定义组
寄存器段定义组用于定义EEPROM结构的连续寄存器段。
它由三个字节组成。第一个字节定义该组有多少连续的寄
存器字节。如果用户将0x000写入第一个字节,则说明该
组仅有一个字节。如果用户写入0x001,则说明该组有两
个字节。一组最多可以包括128个寄存器。
AD9520-0
IO_UPDATE(操作代码0x80)
EEPROM控制器利用此操作代码产生IO_UPDATE信号,
以便在下载过程中用缓冲寄存器组更新活动控制寄存器
组。
在最后一个寄存器段定义组结束后,至少应有一个
IO_UPDATE操作代码。这样在读取EEPROM时,当
AD9520的所有寄存器都加载完成后,至少会发生一次
IO_UPDATE。如果在写入EEPROM期间不存在此操作代
码,则从EEPROM加载的寄存器值不会传输到活动寄存器
空间,而且这些值在从EEPROM加载到AD9520之后不会生
效。
End-of-Data(操作代码0xFF)
在上传和下载过程中,EEPROM控制器使用此操作代码终
止EEPROM与控制寄存器之间的数据传输过程。EEPROM
缓冲段中的最后一项应当是此操作代码或pseudo-end-of-
data操作代码。
Pseudo-End-of-Data(操作代码0xFE)
AD9520 EEPROM缓冲段长23字节,最多可以容纳7个寄存
器段定义组。如果用户希望定义7个以上的寄存器段定义
组,则可以使用pseudo-end-of-data操作代码。在上传过程
中,当EEPROM控制器接收到pseudo-end-of-data操作代码
时,它会暂停数据传输过程,将REG2EEPROM位清零,并
使能AD9520串行端口。然后,用户可以再次对EEPROM缓
冲段进行编程,并将REG2EEPROM位 (0xB03)和
IO_UPDATE寄存器(0x232)置1,重新启动数据传输过程。
内部I2C主机随后开始写入EEPROM,从最后写入操作保
持的EEPROM地址开始。
该序列能够克服EEPROM缓冲段的大小限制,支持将更多
离散指令写入EEPROM。它还允许用户多次写入同一寄存
器,每次写入不同的值。
后两个字节是该组第一个寄存器的存储器地址(16位)的低
位字节和高位字节。
Rev. 0 | Page 59 of 84

AD9520-0
表47. EEPROM缓冲段示例
寄存器地址(十六进制) 位 7 (MSB) 位 6 位 5 位 4 位 3 位 2 位 1 位 0 (LSB)
启动EEPROM缓冲段
0xA00 0
0xA01
0xA02
0xA03 0
0xA04
0xA05
0xA06 0
0xA07
0xA08
0xA09
0xA0A
第一组寄存器的字节数[6:0]
第一组寄存器的地址[15:8]
第一组寄存器的地址[7:0]
第二组寄存器的字节数[6:0]
第二组寄存器的地址[15:8]
第二组寄存器的地址[7:0]
第三组寄存器的字节数[6:0]
第三组寄存器的地址[15:8]
第三组寄存器的地址[7:0]
IO_UPDATE操作代码(0x80)
End-of-data操作代码(0xFF)
Rev. 0 | Page 60 of 84

AD9520-0
热性能
表48. 64引脚LFCSP的热阻
符号 使用JEDEC JESD51-7加JEDEC JESD51-5 2S2P测试板测得的热特性 值(°C/W)
θJA 22.0
θ
JMA
θ
JMA
ΨJB 11.6
θJC 1.3
ΨJT 0.1
AD9520对壳温(T
可以使用气流源。
结至环境热阻,0.0 m/s气流,依据JEDEC JESD51-2(静止空气)
结至环境热阻,1.0 m/s气流,依据JEDEC JESD51-6(运动空气)
19.2
结至环境热阻,2.0 m/s气流,依据JEDEC JESD51-6(运动空气)
17.2
结至板特征参数,1.0 m/s气流,依据JEDEC JESD51-6(运动空气)
和JEDEC JESD51-8
结至壳热阻(芯片至散热器),依据MIL-Std 883的方法1012.1
结至封装顶部特征参数,0 m/s气流,依据JEDEC JESD51-2(静止空气)
)做了规定。为确保T
CASE
不超过范围,
CASE
θJA值供封装比较和PCB设计考虑时使用。θJA可用于计算T
的一阶近似值,计算公式如下:
J
通过下式可确定应用PCB上的结温:
= T
J
+ (ΨJT × PD)
CASE
T
其中:
T
为结温(°C)。
J
T
为壳温(°C),由用户在封装的顶部中央测量。
CASE
Ψ
值通过表48查找。
JT
PD为功耗(见表18中的总功耗)。
= TA + (θJA × PD)
T
J
其中,
T
为环境温度(°C)。
A
值是在需要外部散热器时,供封装比较和PCB设计考虑
θ
JC
时使用。
值则供封装比较和PCB设计考虑时使用。
Ψ
JB
Rev. 0 | Page 61 of 84

AD9520-0
寄存器映射
不能用表49中未列出的寄存器地址,写入这些寄存器不起作用。写入标示为“未用”的寄存器地址也不起作用。
表49. 寄存器映射概览
地址
(十六
参数 位 7 (MSB) 位 6 5 位 4 位 3 位 2 位 1 位 0 (LSB)
进制)
串行端口配置
000
串行端口配置
(SPI模式)
SDO有效 LSB优先/
地址递增
位
软复位
(自清零)
未用 未用
软复位
(自清零)
SDO有效 LSB优先/
地址递增
默认值
(十六
进制)
00
2
C模式)
(I
001 N/A
002
003 N/A
004 00
回读控制
EEPROM ID
EEPROM
005 00
客户版本ID
006 00
007
00
to
00F
PLL
010 7D
011 01
R计数器
012 00
A计数器
013 00
014 03
B计数器
015 00
016 PLL_CTRL_1 06
017 PLL_CTRL_2 00
018 PLL_CTRL_3
019 PLL_CTRL_4
01A PLL_CTRL_5 00
01B PLL_CTRL_6
未用 软复位
(自清零)
PFD极性 电荷泵电流 电荷泵模式 PLL关断PFD电荷泵
未用
未用
未用
设置CP引脚为
VCP/2
使能CMOS
参考输入
直流偏移
R、A、B计数器
SYNC 引脚复位
使能STATUS
引脚分频器
频器
使能VCO
频率监控
复位R
计数器
锁定检测计数器 数字锁定
参考频率
监控阈值
控阈值
(REFIN)
频率监控
复位A和
B计数器
STATUS引脚控制 防反冲脉冲宽度
R路径延迟
LD引脚控制
使能REF1
(REFIN)
频率监控
未用 串行端口配置
未用
EEPROM客户版本ID (LSB)
EEPROM客户版本ID (MSB)
14位R计数器的位[7:0] (LSB)
复位所有
计数器
检测窗口
REFMON引脚控制使能REF2
未用 软复位
(自清零)
未用
保留
保留
未用
14位R计数器的位[13:8] (MSB)
6位A计数器
13位B计数器的位[7:0] (LSB)
13位B计数器的位[12:8] (MSB)
B计数器旁路 预分频器P
禁用数字
锁定检测
VCO校准分频器 立即执行
N路径延迟
未用
N/A
回读有效
寄存器
06
VCO校准
00
00
01C PLL_CTRL_7
01D PLL_CTRL_8
禁用切换去抖 选择REF2 使用
REF_SEL
引脚
使能STATUS
引脚上的
Status_EEPROM
使能
XTAL OSC
使能时钟
倍频器
使能自动
参考切换
禁用PLL
状态
寄存器
Rev. 0 | Page 62 of 84
继续使用
REF2
使能LD
引脚比较器
使能
REF2
未用 使能外部
使能
REF1
保持
使能差分
参考
使能保持
00
80

地址
(十六
参数 位 7 (MSB) 位 6 位 5 位 4 位 3 位 2 位 1 位 0 (LSB)
进制)
01E PLL_CTRL_9 00
未用 外部零延迟反馈
通道分频器选择
使能外部
零延迟
使能零延迟 未用
AD9520-0
默认值
(十六
进制)
01F PLL_Readback N/A
Output Driver Control
0F0 64
0F1 64
0F2 64
0F3 64
0F4 64
0F5 64
0F6 64
0F7 64
0F8 64
0F9 64
0FA
0FB
0FC CSDLD En
0FD CSDLD En
0FE
至
18F
LVPECL通道分频器
190 77
191 00
(只读)
OUT0控制
OUT1控制
OUT2控制
OUT3控制
OUT4控制
OUT5控制
OUT6控制
OUT7控制
OUT8控制
OUT9控制
OUT10控制
OUT11控制
使能CSDLD
上的输出
使能CSDLD
上的输出
Unused 00
分频器0
(PECL)
未用
OUT0格式
OUT1格式
OUT2格式
OUT3格式
OUT4格式
OUT5格式
OUT6格式
OUT7格式
OUT8格式
OUT9格式
OUT10格式
OUT11格式
CSDLD En Out 7
未用
分频器0旁路 分频器0
VCO
校准完成
OUT0 CMOS配置
OUT1 CMOS配置
OUT2 CMOS配置
OUT3 CMOS配置
OUT4 CMOS配置
OUT5 CMOS配置
OUT6 CMOS配置
OUT7 CMOS配置
OUT8 CMOS配置
OUT9 CMOS配置
OUT10 CMOS配置
OUT11 CMOS配置
OUT6
未用
分频器0低周期
忽略SYNC
保持模式
激活
CSDLD En
OUT5
未用 未用
分频器0强
制高电平
选择
REF2
OUT0极性
OUT1极性
OUT2极性
OUT3极性
OUT4极性
OUT5极性
OUT6极性
OUT7极性
OUT8极性
OUT9极性
OUT10极性
OUT11极性
CSDLD En
OUT4
分频器0高
电平启动
大于阈值
CSDLD En
OUT3
OUT11
REF2频率
大于阈值
OUT0 LVPECL
差分电压
OUT1 LVPECL
差分电压
OUT2 LVPECL
差分电压
OUT3 LVPECL
差分电压
OUT4 LVPECL
差分电压
OUT5 LVPECL
差分电压
OUT6 LVPECL
差分电压
OUT7 LVPECL
差分电压
OUT8 LVPECL
差分电压
OUT9 LVPECL
差分电压
OUT10 LVPECL
差分电压
OUT11 LVPECL
差分电压
CSDLD
En
OUT2
CSDLD
En
OUT10
分频器0高周期
分频器0相位偏移
REF1频率
大于阈值
CSDLD En
OUT1
CSDLD En
OUT9
数字锁定检测 VCO频率
OUT0 LVPECL
关断
OUT1 LVPECL
关断
OUT2 LVPECL
关断
OUT3 LVPECL
关断
OUT4 LVPECL
关断
OUT5 LVPECL
关断
OUT6 LVPECL
关断
OUT7 LVPECL
关断
OUT8 LVPECL
关断
OUT9 LVPECL
关断
OUT10 LVPECL
关断
OUT11 LVPECL
关断
CSDLD En
OUT0
CSDLD En
OUT8
64
64
00
00
192 00
Rev. 0 | Page 63 of 84
未用未用 通道0
关断
通道0直接
至输出
禁用分频器
0 DCC

AD9520-0
地址
(十六
参数 位 7 (MSB) 位 6 5 位 4 位 3 位 2 位 1 位 0 (LSB)
进制)
193 33
分频器1
194 00
(PECL)
195 00
分频器1
旁路
分频器1低周期 分频器1高周期
分频器1
忽略SYNC
未用
分频器1强
制高电平
分频器1高
电平启动
未用 通道1关断 通道1直接
分频器1相位偏移
至输出
禁用分频器
1 DCC
默认值
(十六
进制)
分频器2
196 11
197 00
(PECL)
198 00
199 00
分频器3
(PECL)
19A 00
19B 00
19C
00
to
1DF
VCO分频器和CLK输入
1E0 00
1E1
输入CLK
1E2
00
to
22A
系统
230
关断和SYNC 禁用上电
分频器2
旁路
分频器3旁路 分频器3忽
未用 关断VCO
分频器2低周期 分频器2高周期
分频器2
忽略SYNC
分频器3低周期 分频器3高周期
略SYNC
分频器2强
制高电平
未用
分频器3强
制高电平
未用
未用
未用
(默认值= 1)
未用
分频器2高
电平启动
分频器3高
电平启动
关断时钟
输入部分
分频器2相位偏移
未用 通道2
未用
未用
未用 VCO分频器 VCO分频器
时钟接口
未用
SYNC
关断
分频器3相位偏移
通道3
关断
关断VCO
和CLK
关断
SYNC
通道2直接
至输出
通道3直接
至输出
选择VCO
或CLK
关断分配
参考
禁用分频器2
DCC
禁用分频器
3 DCC
旁路VCO
分频器
软SYNC
20
00
231 00
更新所有寄存器
232 IO_UPDATE 00
233
00
to
9FF
EEPROM缓冲段
EEPROM
A00 0 00
缓冲段寄存器1
A01
EEPROM
缓冲段寄存器2
A02
EEPROM
缓冲段寄存器3
A03
A04
EEPROM
缓冲段寄存器4
EEPROM
缓冲段寄存器5
0 02
未用 未用
未用
未用
EEPROM缓冲段寄存器1(默认值:第1组的字节数)
EEPROM缓冲段寄存器2(默认值:第1组的起始寄存器地址的位[15:8])
EEPROM缓冲段寄存器3(默认值:第1组的起始寄存器地址的位[7:0])
EEPROM缓冲段寄存器4(默认值:第2组的字节数)
EEPROM缓冲段寄存器5(默认值:第2组的起始寄存器地址的位[15:8])
Rev. 0 | Page 64 of 84
IO_UPDATE
(自清零)
00
00
00

AD9520-0
地址
(十六
参数 位 7 (MSB) 位 6 位 5 位 4 位 3 位 2 位 1 位 0 (LSB)
进制)
EEPROM缓冲段
A05 04
寄存器6
EEPROM缓冲段
A06 0 0E
寄存器7
EEPROM缓冲段
A07 00
寄存器8
EEPROM缓冲段
A08 10
寄存器9
A09 0 0E
EEPROM缓冲段
寄存器10
A0A 00
EEPROM缓冲段
寄存器11
EEPROM缓冲段
A0B F0
寄存器12
A0C 0 0B
EEPROM缓冲段
寄存器13
A0D 01
EEPROM缓冲段
寄存器14
EEPROM缓冲段寄存器6(默认值:第2组的起始寄存器地址的位[7:0])
EEPROM缓冲段寄存器7(默认值:第3组的字节数)
EEPROM缓冲段寄存器8(默认值:第3组的起始寄存器地址的位[15:8])
EEPROM缓冲段寄存器9(默认值:第3组的起始寄存器地址的位[7:0])
EEPROM缓冲段寄存器10(默认值:第4组的字节数)
EEPROM缓冲段寄存器11(默认值:第4组的起始寄存器地址的位[15:8])
EEPROM缓冲段寄存器12(默认值:第4组的起始寄存器地址的位[7:0])
EEPROM缓冲段寄存器13(默认值:第5组的字节数)
EEPROM缓冲段寄存器14(默认值:第5组的起始寄存器地址的位[15:8])
默认值
(十六
进制)
A0E
EEPROM缓冲段
寄存器15
A0F
EEPROM缓冲段
寄存器16
A10
EEPROM缓冲段
寄存器17
EEPROM缓冲段
A11
寄存器18
A12
EEPROM缓冲段
寄存器19
A13 02
EEPROM缓冲段
寄存器20
A14 30
EEPROM缓冲段
寄存器21
EEPROM缓冲段
A15 80
寄存器22
EEPROM缓冲段
A16 FF
寄存器23
A17
00
to
AFF
0 01
0 01
EEPROM缓冲段寄存器15(默认值:第5组的起始寄存器地址的位[7:0])
EEPROM缓冲段寄存器16(默认值:第6组的字节数)
EEPROM缓冲段寄存器17(默认值:第6组的起始寄存器地址的位[15:8])
EEPROM缓冲段寄存器18(默认值:第6组的起始寄存器地址的位[7:0])
EEPROM缓冲段寄存器19(默认值:第7组的字节数)
EEPROM缓冲段寄存器20(默认值:第7组的起始寄存器地址的位[15:8])
EEPROM缓冲段寄存器21(默认值:第7组的起始寄存器地址的位[7:0])
EEPROM缓冲段寄存器22(默认值:EEPROM中的IO_UPDATE)
EEPROM缓冲段寄存器23(默认值:数据结束)
未用
90
01
E0
Rev. 0 | Page 65 of 84

AD9520-0
地址
(十六
参数 位 7 (MSB) 位 6 位 5 位 4 位 3 位 2 位 1 位 0 (LSB)
进制)
EEPROM缓冲段
EEPROM状态
B00 00
(只读)
EEPROM错误
B01 00
校验(只读)
未用
未用
未用
未用
STATUS_
EEPROM
EEPROM
数据错误
默认值
(十六
进制)
EEPROM控制1
B02 00
EEPROM控制2
B03 00
未用
未用
Soft_EEPROM
(自清零)
未用
使能EEPROM
写入
REG2EEPROM
(自清零)
Rev. 0 | Page 66 of 84

AD9520-0
寄存器映射描述
表50至表60详细描述了控制寄存器的各个功能。寄存器按十六进制地址列出。对一个寄存器中的特定位或位域的引用用方括号
表示。例如,[3]表示位3,[5:2]表示从位5到位2的位域。
表50. SPI模式串行端口配置
寄存器地址(十六进制) 位 名称 描述
000 [7]
000 [6]
000 [5]
000 [4]
000 [3:0]
004 [0] 回读有效寄存器
SDO有效
LSB优先/地址递增
软复位
未用
镜像[7:4]
选择单向或双向数据传输模式。
[7] = 0;SDIO引脚用于读和写;SDO为高阻态(默认)。
[7] = 1;SDO用于读取;SDIO用于写入;单向模式。
SPI MSB或LSB数据方向。(I
[6] = 0;数据以MSB优先方向;递减寻址(默认)。
[6] = 1;数据以LSB优先方向;递增寻址。
软复位。
[5] = 1(自清零)。软复位;恢复内部寄存器的默认值。
位[3:0]应当始终是位[7:4]的镜像,这样器件处于MSB优先模式还是LSB优先模式都无所谓
(参见寄存器0x000[6])。按如下方式设置各个位:
[0] = [7]
[1] = [6]
[2] = [5]
[3] = [4]
选择用于回读的寄存器库。
[0] = 0;回读缓冲寄存器(默认)。
[0] = 1;回读有效寄存器。
2
C模式下忽略此寄存器。)
2
表51. I
C模式串行端口配置
寄存器地址(十六进制) 位 名称 描述
000 [7:6]
000 [5]
000 [4]
000 [3:0]
004 [0]
未用
软复位
未用
镜像[7:4]
回读有效寄存器
软复位。
[5] = 1(自清零)。软复位;恢复内部寄存器的默认值。
位[3:0]应当始终是位[7:4]的镜像,这样器件处于MSB优先模式还是LSB优先模式都无所谓
(参见寄存器0x000[6])。按如下方式设置各个位:
[0] = [7]
[1] = [6]
[2] = [5]
[3] = [4]
选择用于回读的寄存器库。
[0] = 0;回读缓冲寄存器(默认)。
[0] = 1;回读有效寄存器。
表52. EEPROM ID
寄存器地址(十六进制) 位 名称 描述
005
006
[7:0]
[7:0]
EEPROM客户版本
ID (LSB)
EEPROM客户版本
ID (MSB)
16位EEPROM ID[7:0]。此寄存器与0x006结合使用,允许用户存储一个唯一ID,
以识别EEPROM中存储何种版本的AD9520寄存器设置。它对AD9520的操作无任何影响
(默认值:0x00)。
16位EEPROM ID[15:8]。此寄存器与0x005结合使用,允许用户存储一个唯一ID,以识别
EEPROM中存储何种版本的AD9520寄存器设置。它对AD9520的操作无任何影响(默认
值:0x00)。
Rev. 0 | Page 67 of 84

AD9520-0
表53. PLL
寄存器
地址(十
六进制)
位 名称 描述
010 [7]
010 [6:4]
0 0 0 0.6
0 0 1 1.2
0 1 0 1.8
0 1 1 2.4
1 0 0 3.0
1 0 1 3.6
1 1 0 4.2
1 1 1 4.8
010 [3:2]
0 0
0 1
1 0
1 1
010 [1:0]
0 0
0 1
1 0
1 1
011 [7:0]
012 [5:0]
013 [5:0]
014 [7:0]
015 [4:0]
016 [7]
016 [6]
016 [5]
016 [4]
PFD极性
CP电流
PLL关断
设置PFD极性。负极性仅用于(如需要)外部VCO/VCXO。
片内VCO要求正极性,[7] = 0。
[7] = 0;正极性(较高的控制电压产生较高的频率,默认值)
[7] = 1;负极性(较高的控制电压产生较低的频率)
电荷泵电流(CPRSET = 5.1 kΩ)。
[6] [5] [4] I
电荷泵工作模式
CP
[3] [2] 电荷泵模式
高阻态
驱动源电流(增强)
驱动吸电流(减弱)
正常工作(默认)
PLL关断
PLL工作模式。
[1] [0] 模式
正常工作;要使用PLL,必须选择该模式。
异步关断(默认)
未用
同步关断
14位R计数器的
位[7:0] (LSB)
14位R计数器的
位[13:8] (MSB)
6位A计数器 A计数器(N分频器的一部分)。N分频器也称为反馈分频器(默认:0x00)。
13位B计数器的
位[7:0] (LSB)
13位B计数器的
位[12:8] (MSB)
设置CP引脚为
VCP/2
复位R计数器
复位A和B计数器 复位A和B计数器(N分频器的一部分)。
复位所有计数器 复位R、A和B计数器。
参考分频器LSB—最低8位。参考分频器(也称为R分频器或R计数器)为14位长。最低8位位于此寄存器中
(默认:0x01)。
参考分频器MSB—最高6位。参考分频器(也称为R分频器或R计数器)为14位长。最高6位位于此寄存器中
(默认:0x00)。
B计数器(N分频器的一部分)—最低8位。N分频器也称为反馈分频器(默认:0x03)。
B计数器(N分频器的一部分)—最高5位。N分频器也称为反馈分频器(默认:0x00)。
将CP引脚设为VCP电源电压的一半。
[7] = 0;电荷泵正常工作(默认)。
[7] = 1;CP引脚设为VCP/2。
复位R计数器(R分频器)。
[6] = 0;正常(默认)。
[6] = 1;R计数器保持复位状态。
[5] = 0;正常(默认)。
[5] = 1;A和B计数器保持复位状态。
[4] = 0;正常(默认)。
[4] = 1;R、A和B计数器保持复位状态。
(mA)
(默认)
Rev. 0 | Page 68 of 84

寄存器
地址(十
六进制)
位 名称 描述
016 [3]
B计数器旁路
AD9520-0
B计数器旁路。仅当预分频器在FD模式下工作时有效。
[3] = 0;正常(默认)。
[3] = 1;B计数器设为1分频,预分频器设置决定N分频器的分频比。
016 [2:0]
0 0 0 FD
0 0 1 FD
0 1 0 DM
0 1 1 DM
1 0 0 DM
1 0 1 DM
1 1 0 DM
1 1 1 FD
017 [7:2]
0 0 0 0 0 0 LVL
0 0 0 0 0 1 DYN
0 0 0 0 1 0 DYN
0 0 0 0 1 1 DYN
0 0 0 1 0 0 DYN
0 0 0 1 0 1 DYN
0 0 0 1 1 0 DYN
0 X X X X X LVL
1 0 0 0 0 0 LVL
1 0 0 0 0 1 DYN
1 0 0 0 1 0 DYN
1 0 0 0 1 1 DYN
预分频器P
STATUS
引脚控制
预分频器:DM = 双模,FD = 固定分频。预分频器P是反馈分频器的一部分。
[2] [1] [0] 模式 预分频器
1分频。
2分频。
当A ≠ 0时,2分频和3分频;当A = 0时,2分频。
当A ≠ 0时,4分频和5分频;当A = 0时,4分频。
当A ≠ 0时,8分频和9分频;当A = 0时,8分频。
当A ≠ 0时,16分频和17分频;当A = 0时,16分频。
当A ≠ 0时,32分频和33分频;当A = 0时,32分频(默认)。
3分频。
选择出现在STATUS引脚上的信号。要重新设置STATUS引脚,0x01D[7]必须为0。
电平或
[7] [6] [5] [4] [3] [2]
动态信号
STATUS引脚上的信号
直流地(默认)
N分频器输出(延迟后)
R分频器输出(延迟后)
A分频器输出
预分频器输出
PFD上升脉冲
PFD下降脉冲
地(直流);针对0XXXXX未规定的所有其它情况。
后续选择与REFMON相同。
地(直流)
REF1时钟(差分模式下为差分参考)
REF2时钟(差分模式下不可用)
选定的PLL参考(差分模式下为差分参考)
1 0 0 1 0 0 DYN
1 0 0 1 0 1 LVL
1 0 0 1 1 0 LVL
1 0 0 1 1 1 LVL
1 0 1 0 0 0 LVL
1 0 1 0 0 1 LVL
1 0 1 0 1 0 LVL
1 0 1 0 1 1 LVL
1 0 1 1 0 0 LVL
1 0 1 1 0 1 LVL
1 0 1 1 1 0 LVL
1 0 1 1 1 1 LVL
1 1 0 0 0 0 LVL
1 1 0 0 0 1 DYN
1 1 0 0 1 0 DYN
1 1 0 0 1 1 DYN
Rev. 0 | Page 69 of 84
未选定的PLL参考(差分模式下不可用)
选定参考的状态(差分参考的状态);高电平有效。
未选定参考的状态(差分模式下不可用);高电平有效。
REF1频率的状态(高电平有效)
REF2频率的状态(高电平有效)
(REF1频率的状态) AND (REF2频率的状态)
(DLD) AND (选定参考的状态) AND (VCO的状态)
VCO频率的状态(高电平有效)
选定参考(低电平= REF1,高电平= REF2)
DLD;高电平有效。
保持模式激活(高电平有效)
内部保持比较器输出不可用(高电平有效)
VS(PLL电源)
REF1 clock (差分模式下为差分参考)
REF2 clock (差分模式下不可用)
Selected reference to PLL (差分模式下为差分参考)

AD9520-0
寄存器
地址(十
六进制)
1 1 0 1 0 0 DYN
名称 描述
位
[7] [6] [5] [4] [3] [2]
电平或
动态信号
STATUS引脚上的信号
Unselected reference to PLL (差分模式下不可用)
1 1 0 1 0 1 LVL
1 1 0 1 1 0 LVL
1 1 0 1 1 1 LVL
1 1 1 0 0 0 LVL
1 1 1 0 0 1 LVL
1 1 1 0 1 0 LVL
1 1 1 0 1 1 LVL
1 1 1 1 0 0 LVL
1 1 1 1 0 1 LVL
1 1 1 1 1 0 LVL
1 1 1 1 1 1 LVL
017 [1:0]
0 0 2.9 (默认)
0 1 1.3
1 0 6.0
1 1 2.9
018 [7]
018 [6:5]
0 0 5 (默认)
0 1 16
1 0 64
1 1 255
018 [4]
018 [3]
018 [2:1]
0 0 2
0 1 4
1 0 8
1 1 16 (默认)
防反冲脉冲
宽度
使能CMOS参
考输入直流
偏移
锁定检测
计数器
数字锁定
检测窗口
禁用数字
锁定检测
VCO校准
分频器
[1] [0] 防反冲脉冲宽度(ns)
使能单端CMOS输入模式下的直流偏移,防止交流耦合和输入丢失时发生震颤。
[7] = 0;禁用直流偏移(默认)。
[7] = 1;使能直流偏移。
边沿在锁定检测窗口内的连续PFD周期数,只有经过该数量的PFD周期后,DLD才会指示锁定。
[6] [5] 确定锁定的PFD周期数
如果PFD输入端的上升沿时间差小于锁定检测窗口时间,则数字锁定检测标志置1。该标志将保持置1
状态,直到时间差大于失锁阈值。
[4] = 0;高范围(默认)。
[4] = 1;低范围。
数字锁定检测操作。
[3] = 0;锁定检测正常工作(默认)。
[3] = 1;禁用锁定检测。
VCO校准分频器。用于从PLL参考时钟产生VCO校准时钟的分频器(有关VCO校准分频器基于PFD
速率的推荐设置,参见“VCO校准”部分)。
[2] [1] VCO校准时钟分频器
选定参考的状态(差分参考的状态);低电平有效。
未选定参考的状态(差分模式下不可用);低电平有效。
REF1频率的状态(低电平有效)
REF2频率的状态(低电平有效)
(Status of REF1 frequency) AND (status of REF2 frequency)
(DLD) AND (Status of selected reference) AND (status of VCO)
VCO频率的状态(低电平有效)
选定参考(低电平= REF2,高电平= REF1)
DLD(低电平有效)
保持模式激活(低电平有效)
LD引脚比较器输出(低电平有效)
.
.
Rev. 0 | Page 70 of 84

寄存器
地址(十
六进制)
位
018 [0]
名称 描述
立即执行
VCO校准
用于启动VCO校准的位。在有效寄存器中,此位必须从0切换到1。启动校准的操作顺序如下:
设为0,跟随一个IO_UPDATE位(寄存器0x232[0]);然后置1,跟随另一个IO_UPDATE位
(寄存器0x232[0])。利用该操作顺序可以完全控制VCO校准相对于其它可能影响校准的寄存器
编程的发生时间(默认值为0)。注意,在VCO校准期间,VCO分频器(寄存器0x1E0[2:0])
不得是静态的。
AD9520-0
019 [7:6]
0 0
0 1
1 0
1 1
019 [5:3]
019 [2:0]
01A [7]
01A [6]
01A [5:0]
0 0 0 0 0 0 LVL
0 0 0 0 0 1 DYN
0 0 0 0 1 0 DYN
0 0 0 0 1 1 HIZ
0 0 0 1 0 0 CUR
0 X X X X X LVL
1 0 0 0 0 0 LVL
1 0 0 0 0 1 DYN
1 0 0 0 1 0 DYN
1 0 0 0 1 1 DYN
R、A、B
计数器SYNC
引脚复位
R路径延迟
N路径延迟
使能STATUS
引脚分频器
参考频率
监控阈值
LD引脚控制 选择连接到LD引脚的信号。
[7] [6] 操作
SYNC时无操作(默认)
异步复位
同步复位
SYNC时无操作
R路径延迟,见表2(默认值:0x0)。
N路径延迟,见表2(默认值:0x0)。
使能STATUS引脚的4分频,这样更容易查看离开R和N分频器的低占空比信号。
[7] = 0;禁用STATUS引脚的4分频(默认)。
[7] = 1;使能STATUS引脚的4分频。
设置参考(REF1/REF2)频率监控器的检测阈值频率。不影响VCO频率监控器的检测阈值
(见表17的REF1、REF2和VCO频率状态监控器参数)。
[6] = 0;如果频率高于1.02 MHz,则频率有效(默认)。
[6] = 1;如果频率高于6 kHz,则频率有效。
电平或
[5] [4] [3] [2] [1] [0]
动态信号
LD引脚的信号
数字锁定检测(高电平=锁定;低电平=未锁定,默认)
P沟道开漏锁定检测(模拟锁定检测)
N沟道开漏锁定检测(模拟锁定检测)
三态(高阻态)LD引脚
电流源锁定检测(当DLD为真时,110 μA)
地(直流);针对0XXXXX未规定的所有其它情况。
后续选择与REFMON相同。
地(直流)
REF1时钟(差分模式下为差分参考)
REF2时钟(差分模式下不可用)
选定的PLL参考(差分模式下为差分参考)
1 0 0 1 1 1 LVL
1 0 1 0 0 0 LVL
1 0 1 0 0 1 LVL
1 0 1 0 1 0 LVL
1 0 1 0 1 1 LVL
1 0 1 1 0 0 LVL
1 0 1 1 0 1 LVL
1 0 1 1 1 0 LVL
1 0 1 1 1 1 LVL
1 1 0 0 0 0 LVL
1 1 0 0 0 1 DYN
1 0 0 1 0 0 DYN
1 0 0 1 0 1 LVL
1 0 0 1 1 0 LVL
Rev. 0 | Page 71 of 84
未选定的PLL参考(差分模式下不可用)
选定参考的状态(差分参考的状态);
高电平有效。
未选定参考的状态(差分模式下不可用);
高电平有效。
REF1频率的状态(高电平有效)
REF2频率的状态(高电平有效)
(REF1频率的状态) AND (REF2频率的状态)
(DLD) AND (选定参考的状态) AND (VCO的状态)
VCO频率的状态(高电平有效)
选定参考(低电平= REF1,高电平= REF2)
DLD;高电平有效。
保持模式激活(高电平有效)
不使用
VS(PLL电源)
REF1 clock (差分模式下为差分参考)

AD9520-0
寄存器
地址(十
六进制)
1 1 0 0 1 0 DYN
1 1 0 0 1 1 DYN
名称 描述
位
[5] [4] [3] [2] [1] [0]
电平或
动态信号
LD引脚的信号
REF2 clock (差分模式下不可用)
Selected reference to PLL (差分模式下为差分参考)
1 1 0 1 0 0 DYN
1 1 0 1 0 1 LVL
1 1 0 1 1 0 LVL
1 1 0 1 1 1 LVL
1 1 1 0 0 0 LVL
1 1 1 0 0 1 LVL
1 1 1 0 1 0 LVL
1 1 1 0 1 1 LVL
1 1 1 1 0 0 LVL
1 1 1 1 0 1 LVL
1 1 1 1 1 0 LVL
1 1 1 1 1 1 LVL
01B [7]
01B [6]
01B [5]
01B [4:0]
0 0 0 0 0 LVL
0 0 0 0 1 DYN
0 0 0 1 0 DYN
0 0 0 1 1 DYN
0 0 1 0 0 DYN
0 0 1 0 1 LVL
0 0 1 1 0 LVL
0 0 1 1 1 LVL
0 1 0 0 0 LVL
0 1 0 0 1 LVL
0 1 0 1 0 LVL
0 1 0 1 1 LVL
0 1 1 0 0 LVL
0 1 1 0 1 LVL
使能VCO
频率监控
使能REF2
(REFIN)
频率监控
使能REF1
(REFIN)
频率监控
REFMON
引脚控制
.
.
使能或禁用VCO频率监控。
[7] = 0;禁用VCO频率监控(默认)。
[7] = 1;使能VCO频率监控。
使能或禁用REF2频率监控。
[6] = 0;禁用REF2频率监控(默认)。
[6] = 1;使能REF2频率监控。
使能REF1 (REFIN)频率监控,适用于REF1(单端)和REFIN(差分)输入(由差分参考模式选择)。
[5] = 0;禁用REF1 (REFIN)频率监控(默认)。
[5] = 1;使能REF1 (REFIN)频率监控。
选择连接到REFMON引脚的信号。
电平或
[4] [3] [2] [1] [0]
动态信号
Rev. 0 | Page 72 of 84
Selected reference to PLL (差分模式下不可用)
选定参考的状态(差分参考的状态);低电平有效。
未选定参考的状态(差分模式下不可用);低电平有效。
REF1频率的状态(低电平有效)
REF2频率的状态(低电平有效)
(Status of REF1 frequency) AND (status of REF2 frequency)
(DLD) AND (Status of selected reference) AND (status of VCO)
VCO频率的状态(低电平有效)
选定参考(低电平= REF2,高电平= REF1)
DLD;低电平有效。
保持模式激活(低电平有效)
不使用
LD引脚的信号
直流地(默认)
REF1时钟(差分模式下为差分参考)
REF2时钟(差分模式下不可用)
选定的PLL参考
(差分模式下为差分参考)
未选定的PLL参考(差分模式下不可用)
选定参考的状态(差分参考的状态);
高电平有效。
未选定参考的状态(差分模式下不可用);
高电平有效。
REF1频率的状态(高电平有效)
REF2频率的状态(高电平有效)
(REF1频率的状态) AND (REF2频率的状态)
(DLD) AND (选定参考的状态) AND (VCO的状态)
VCO频率的状态(高电平有效)
选定参考(低电平= REF1,高电平= REF2)
DLD;低电平有效。
.
.

寄存器
地址(十
六进制)
0 1 1 1 0 LVL
0 1 1 1 1 LVL
1 0 0 0 0 LVL
1 0 0 0 1 DYN
1 0 0 1 0 DYN
1 0 0 1 1 DYN
名称 描述
位
[4] [3] [2] [1] [0]
电平或
动态信号
AD9520-0
LD引脚的信号
保持模式激活(高电平有效)
不使用
VS(PLL电源)
REF1 clock (差分模式下为差分参考)
REF2 clock (差分模式下不可用)
Selected reference to PLL (差分模式下为差分参考)
1 0 1 0 0 DYN
1 0 1 0 1 LVL
1 0 1 1 0 LVL
1 0 1 1 1 LVL
1 1 0 0 0 LVL
1 1 0 0 1 LVL
1 1 0 1 0 LVL
1 1 0 1 1 LVL
1 1 1 0 0 LVL
1 1 1 0 1 LVL
1 1 1 1 0 LVL
1 1 1 1 1 LVL
01C [7]
01C [6]
01C [5]
01C [4]
禁用切换
去抖
选择REF2
使用REF_SEL
引脚
使能自动参考
切换
禁用或使能切换去抖电路。
[7] = 0;使能切换去抖电路(默认)。
[7] = 1;禁用切换去抖电路。
如果寄存器0x01C[5] = 0,则选择手动模式下PLL的参考;寄存器选择的参考控制。
[6] = 0;选择REF1(默认)。
[6] = 1;选择REF2。
如果寄存器0x01C[4] = 0(手动),则设置PLL参考选择的方法。
[5] = 0;使用寄存器0x01C[6](默认)。
[5] = 1;使用REF_SEL引脚。
自动或手动参考切换。单端参考模式必须通过寄存器0x01C[0] = 0选择。
[4] = 0;手动参考切换(默认)。
[4] = 1;自动参考切换。
设置该位也会使REF1和REF2上电,并覆盖寄存器0x01C[2:1]的设置。
Unselected reference to PLL (差分模式下不可用)
选定参考的状态(差分参考的状态);低电平有效。
未选定参考的状态(差分模式下不可用);低电平有效。
REF1频率的状态(低电平有效)
REF2频率的状态(低电平有效)
(Status of REF1 frequency) AND (status of REF2 frequency).
(DLD) AND (status of selected reference) AND (status of VCO).
VCO频率的状态(低电平有效)
选定参考(低电平= REF2,高电平= REF1)
DLD;低电平有效。
保持模式激活(低电平有效)
不使用
01C [3]
01C [2]
01C [1]
01C [0]
继续使用
REF2
使能
REF2
使能REF1
使能差分参考
切换后继续使用REF2。
[3] = 0;当REF1状态再次变为良好时,返回到REF1(默认)。
[3] = 1;切换后继续使用REF2。不会自动返回到REF1。
此位用于开启REF2的电源。使能自动参考切换时,此位被覆盖。
[2] = 0;REF2关断(默认)。
[2] = 1;REF2上电。
此位用于开启REF1的电源。使能自动参考切换时,此位被覆盖。
[1] = 0;REF1关断(默认)。
[1] = 1;REF1上电。
选择PLL参考模式:差分或单端。
当此位置1时,寄存器0x01C[2:1]应清0。
[0] = 0;单端参考模式(默认)。
[0] = 1;差分参考模式。
Rev. 0 | Page 73 of 84

AD9520-0
寄存器
地址(十
六进制)
01D [7]
01D [6]
01D [5]
01D [4]
01D [3]
01D [1]
01D [0]
01E [4:3]
0 0
0 1
1 0
1 1
01E [2]
01E [1]
01F [6]
01F [5]
01F [4]
01F [3]
名称 描述
位
使能STATUS
引脚上的
Status_EEPROM
使能
XTAL OSC
使能时钟
倍频器
禁用PLL
状态寄存器
使能LD
引脚比较器
使能外部
保持
使能保持
外部零延迟
反馈通道
分频器选择
使能外部
零延迟
使能零延迟
VCO校准完成
(只读)
保持模式激活
(只读)
选择REF2
(只读)
VCO频率大于
阈值(只读)
使能STATUS引脚上的Status_EEPROM信号。
[7] = 0;STATUS引脚由0x017[7:2]选择控制。
[7] = 1;选择STATUS引脚上的Status_EEPROM信号。此位覆盖0x017[7:2](默认)。
使能PLL参考输入端的晶振所需的保持放大器。
[6] = 0;禁用晶振保持放大器(默认)。
[6] = 1;使能晶振保持放大器。
使能PLL参考输入时钟倍频器。
[5] = 0;禁用倍频器(默认)。
[5] = 1;使能倍频器。
禁用PLL状态寄存器回读。
[4] = 0;使能PLL状态寄存器(默认)。
[4] = 1;禁用PLL状态寄存器。如果此位置1,则寄存器01F不会自动更新。
使能LD引脚电压比较器。用于LD引脚电流源锁定检测模式。当AD9520处于内部(自动)保持模式时,
可以利用LD引脚上的电压来确定PLL先前是否处于锁定状态(见图46)。否则,它可以与REFMON和
STATUS引脚一起使用,以监控此引脚上的电压。
[3] = 0;禁用LD引脚比较器并忽略LD引脚电压;内部/自动保持控制器视此引脚为真(高电平,默认)。
[3] = 1;使能LD引脚比较器(利用LD引脚电压确定PLL先前是否处于锁定状态)。
通过SYNC引脚使能外部保持控制。(这将禁用内部保持模式。)
[1] = 0;自动保持模式,保持由自动保持电路控制(默认)。
[1] = 1;外部保持模式,保持由SYNC引脚控制。
使能内部控制的保持功能。
[0] = 0;禁用保持(默认)。
[0] = 1;使能保持。
[4] [3] 选择外部零延迟路径中使用哪个通道分频器
选择使用何种零延迟模式。
[2] = 0;如果0x01E[1] = 1,则使能内部零延迟模式(默认)。
[2] = 1;如果0x01E[1] = 1,则使能外部零延迟模式。
使能零延迟功能。
[1] = 0;禁用零延迟功能(默认)。
[1] = 1;使能零延迟功能。
回读寄存器。指示VCO校准的状态。
[6] = 0;VCO校准未完成。
[6] = 1;VCO校准已完成。
回读寄存器。指示器件是否处于保持状态(见图46)。这与保持使能不同。
[5] = 0;非处于保持状态。
[5] = 1;保持状态激活。
回读寄存器。指示选择哪一个PLL参考作为PLL的输入。
[4] = 0;选择REF1(如果在差分模式下,则选择差分参考)。
[4] = 1;选择REF2。
回读寄存器。指示VCO频率是否大于阈值(见表17的REF1、REF2和VCO频率状态监控器参数)。
[3] = 0;VCO频率小于阈值。
[3] = 1;VCO频率大于阈值。
选择通道分频器0(默认)
选择通道分频器1
选择通道分频器2
选择通道分频器3
Rev. 0 | Page 74 of 84

寄存器
地址(十
六进制)
01F [2]
01F [1]
01F [0]
表54. 输出驱动器控制
寄存器
地址(十
六进制)
0F0 [7]
0F0 [6:5]
0F0 [4:3]
0 (默认) X 0 (默认) LVPECL
0 X 1 LVPECL
1 0 (默认) 0 CMOS
1 0 1 CMOS
1 1 0 CMOS
1 1 1 CMOS
0F0 [2:1]
0 0 400
0 1 600
1 (默认) 0 (默认) 780
1 1 960
0F0 [0]
0F1 [7:0]
0F2 [7:0]
0F3 [7:0]
0F4 [7:0]
0F5 [7:0]
名称 描述
位
REF2频率大于
阈值(只读)
REF1频率大于
阈值(只读)
数字锁定检测
(只读)
名称 描述
位
OUT0格式
OUT0 CMOS
配置
OUT0极性
OUT0 LVPECL
差分电压
OUT0 LVPECL
关断
OUT1控制
OUT2控制
OUT3控制
OUT4控制
OUT5控制
回读寄存器。指示REF2的信号频率是否大于寄存器0x01A[6]设置的阈值频率。
[2] = 0;REF2频率小于阈值频率。
[2] = 1;REF2频率大于阈值频率。
回读寄存器。指示REF1的信号频率是否大于寄存器0x01A[6]设置的阈值频率。
[1] = 0;REF1频率小于阈值频率。
[1] = 1;REF1频率大于阈值频率。
回读寄存器。数字锁定检测。
[0] = 0;PLL未锁定。
[0] = 1;PLL已锁定。
选择OUT0的输出类型。
[7] = 0;LVPECL(默认)。
[7] = 1;CMOS。
当0x0F0[7] = 1时,设置OUT0的CMOS输出配置。
[6:5] OUT0A OUT0B
00
01
10
11(默认)
设置OUT0的输出极性。
[7] [4] [3] 输出类型 OUT0A OUT 0B
设置LVPECL输出差分电压(V
[2] [1] V
LVPECL关断。
[0] = 0;正常工作(默认)。
[0] = 1;安全关断。
此寄存器控制OUT1,位功能分配与寄存器0x0F0相同。
此寄存器控制OUT2,位功能分配与寄存器0x0F0相同。
此寄存器控制OUT3,位功能分配与寄存器0x0F0相同。
此寄存器控制OUT4,位功能分配与寄存器0x0F0相同。
此寄存器控制OUT5,位功能分配与寄存器0x0F0相同。
三态
开
三态
开
三态
三态
开
开
)。
OD
(mV)
OD
同相
反相
同相
反相
同相
反相
AD9520-0
反相
同相
同相
反相
反相
同相
Rev. 0 | Page 75 of 84

AD9520-0
寄存器
地址(十
六进制)
0F6 [7:0]
0F7 [7:0]
0F8 [7:0]
0F9 [7:0]
0FA [7:0]
0FB [7:0]
0FC [7]
0 0
1 0
1 1
0FC [6]
0FC [5]
0FC [4]
0FC [3]
0FC [2]
0FC [1]
0FC [0]
0FD [3]
0FD [2]
0FD [1]
0FD [0]
名称 名称
位
OUT6控制
OUT7控制
OUT8控制
OUT9控制
OUT10控制
OUT11控制
CSDLD En OUT6
CSDLD En OUT5
CSDLD En OUT4
CSDLD En OUT3
CSDLD En OUT2
CSDLD En OUT1
CSDLD En OUT0
CSDLD En
OUT11
CSDLD En
OUT10
CSDLD En OUT9
CSDLD En
此寄存器控制OUT6,位功能分配与寄存器0x0F0相同。
此寄存器控制OUT7,位功能分配与寄存器0x0F0相同。
此寄存器控制OUT8,位功能分配与寄存器0x0F0相同。
此寄存器控制OUT9,位功能分配与寄存器0x0F0相同。
此寄存器控制OUT10,位功能分配与寄存器0x0F0相同。
此寄存器控制OUT11,位功能分配与寄存器0x0F0相同。
仅当CSDLD为高电平时,OUT7使能。 CSDLD En OUT7
[7] CSDLD信号 OUT7使能状态
仅当CSDLD为高电平时,OUT6使能。设置与寄存器0x0FC[7]相同。
仅当CSDLD为高电平时,OUT5使能。设置与寄存器0x0FC[7]相同。
仅当CSDLD为高电平时,OUT4使能。设置与寄存器0x0FC[7]相同。
仅当CSDLD为高电平时,OUT3使能。设置与寄存器0x0FC[7]相同。
仅当CSDLD为高电平时,OUT2使能。设置与寄存器0x0FC[7]相同。
仅当CSDLD为高电平时,OUT1使能。设置与寄存器0x0FC[7]相同。
仅当CSDLD为高电平时,OUT0使能。设置与寄存器0x0FC[7]相同。
仅当CSDLD为高电平时,OUT11使能。设置与寄存器0x0FC[7]相同。
仅当CSDLD为高电平时,OUT10使能。设置与寄存器0x0FC[7]相同。
仅当CSDLD为高电平时,OUT9使能。设置与寄存器0x0FC[7]相同。
OUT8
仅当CSDLD为高电平时,OUT8使能。设置与寄存器0x0FC[7]相同。
不受CSDLD信号影响(默认)
异步关断
如果未被其它设置关断,则异步使能OUT7。
要使用此功能,用户必须使用电流源数字锁定检测,并将使能LD引脚
比较器位(0x01D[3])置1。
表55. LVPECL通道分频器
寄存器
地址(十
六进制)
190 [7:4]
190 [3:0]
191 [7]
191 [6]
191 [5]
191 [4]
191 [3:0]
名称 名称
位
分频器0低周期
分频器0高周期
分频器0旁路
分频器0忽略SYNC
分频器0强制高电平
分频器0高电平启动
分频器输入的时钟周期数(减1),在该期间内分频器输出保持低电平。
值0x7表示分频器在8个输入时钟周期内保持低电平(默认:0x7)。
分频器输入的时钟周期数(减1),在该期间内分频器输出保持高电平。
值0x7表示分频器在8个输入时钟周期内保持高电平(默认:0x7)。
旁路并关断分频器;输入送入分频器输出。
[7] = 0;使用分频器(默认)。
[7] = 1;旁路分频器。
忽略同步。
[6] = 0;遵从芯片级SYNC信号(默认)。
[6] = 1;忽略芯片级SYNC信号。
强制分频器输出为高电平。要求同时设置忽略SYNC。
[5] = 0;分频器输出强制为低电平(默认)。
[5] = 1;分频器输出强制为高电平。
选择时钟输出以高电平启动或以低电平启动。
[4] = 0;低电平启动(默认)。
[4] = 1;高电平启动。
相位偏移(默认:0x0)。 分频器0相位偏移
Rev. 0 | Page 76 of 84

寄存器
地址(十
六进制)
位
192 [2]
192 [1]
192 [0]
193 [7:4]
193 [3:0]
194 [7]
194 [6]
194 [5]
194 [4]
194 [3:0]
195 [2]
195 [1]
195 [0]
196 [7:4]
196 [3:0]
197 [7]
名称 描述
通道0关断 通道0关断。
[2] = 0;正常工作(默认)。
[2] = 1;关断。(通过设置此位,OUT0/OUT0、OUT1/OUT1和OUT2/OUT2被置
于安全关断模式。)
通道0直接至输出 将OUT0、OUT1和OUT2连接到分频器0,或者直接连接到VCO或CLK。
[1] = 0;OUT0、OUT1和OUT2连接到分频器0(默认)。
[1] = 1;
如果0x1E1[1:0] = 10b,则VCO直接送至OUT0、OUT1和OUT2。
如果0x1E1[1:0] = 00b,则CLk直接送至OUT0、OUT1和OUT2。
如果0x1E1[1:0] = 01b,则不起作用。
禁用分频器0 DCC 占空比校正功能。
[0] = 0;使能占空比校正(默认)。
[0] = 1;禁用占空比校正。
分频器1低周期 分频器输入的时钟周期数(减1),在该期间内分频器输出保持低电平。
值0x3表示分频器在4个输入时钟周期内保持低电平(默认:0x3)。
分频器1高周期
分频器1旁路
分频器1忽略SYNC
分频器1强制高电平
分频器1高电平启动
分频器1相位偏移 相位偏移(默认:0x0)。
通道1关断 通道1关断。
通道1直接至输出
禁用分频器1 DCC
分频器2低周期
分频器2高周期
分频器2旁路
分频器输入的时钟周期数(减1),在该期间内分频器输出保持高电平。
值0x3表示分频器在4个输入时钟周期内保持高电平(默认:0x3)。
旁路并关断分频器;输入送入分频器输出。
[7] = 0;使用分频器(默认)。
[7] = 1;旁路分频器。
忽略同步。
[6] = 0;遵从芯片级SYNC信号(默认)。
[6] = 1;忽略芯片级SYNC信号。
强制分频器输出为高电平。要求同时设置忽略SYNC。
[5] = 0;分频器输出强制为低电平(默认)。
[5] = 1;分频器输出强制为高电平。
选择时钟输出以高电平启动或以低电平启动。
[4] = 0;低电平启动(默认)。
[4] = 1;高电平启动。
[2] = 0;正常工作(默认)。
[2] = 1;关断。(通过设置此位,OUT3/OUT3、OUT4/OUT4和OUT5/OUT5被置于
安全关断模式。)
将OUT3、OUT4和OUT5连接到分频器1,或者直接连接到VCO或CLK。
[1] = 0;OUT3、OUT4和OUT5连接到分频器1(默认)。
[1] = 1;
如果0x1E1[1:0] = 10b,则VCO直接送至OUT3、OUT4和OUT5。
如果0x1E1[1:0] = 00b,则CLK直接送至OUT3、OUT4和OUT5。
如果0x1E1[1:0] = 01b,则不起作用。
占空比校正功能。
[0] = 0;使能占空比校正(默认)。
[0] = 1;禁用占空比校正。
分频器输入的时钟周期数(减1),在该期间内分频器输出保持低电平。
值0x1表示分频器在2个输入时钟周期内保持低电平(默认:0x1)。
分频器输入的时钟周期数(减1),在该期间内分频器输出保持高电平。
值0x1表示分频器在2个输入时钟周期内保持高电平(默认:0x1)。
旁路并关断分频器;输入送入分频器输出。
[7] = 0;使用分频器(默认)。
[7] = 1;旁路分频器。
AD9520-0
Rev. 0 | Page 77 of 84

AD9520-0
寄存器
地址(十
六进制)
位
197 [6]
197 [5]
197 [4]
197 [3:0]
198 [2]
198 [1]
198 [0]
199 [7:4]
199 [3:0]
19A [7]
19A [6]
19A [5]
19A [4]
19A [3:0]
19B [2]
名称 描述
分频器2忽略SYNC 忽略同步。
[6] = 0;遵从芯片级SYNC信号(默认)。
[6] = 1;忽略芯片级SYNC信号。
分频器2强制高电平 强制分频器输出为高电平。要求同时设置忽略SYNC。
[5] = 0;分频器输出强制为低电平(默认)。
[5] = 1;分频器输出强制为高电平。
分频器2高电平启动 选择时钟输出以高电平启动或以低电平启动。
[4] = 0;低电平启动(默认)。
[4] = 1;高电平启动。
分频器2相位偏移 相位偏移(默认:0x0)。
通道2关断 通道2关断。
[2] = 0;正常工作(默认)。
[2] = 1;关断。(通过设置此位,OUT6/OUT6、OUT7/OUT7和OUT8/OUT8被置于
安全关断模式。)
通道2直接至输出
禁用分频器2 DCC
分频器3低周期
分频器3高周期
分频器3旁路
分频器3忽略SYNC
分频器3强制高电平
分频器3高电平启动
分频器3相位偏移 相位偏移(默认:0x0)。
通道3关断 通道3关断。
将OUT6、OUT7和OUT8连接到分频器2,或者直接连接到VCO或CLK。
[1] = 0;OUT6、OUT7和OUT8连接到分频器2(默认)。
[1] = 1:
如果0x1E1[1:0] = 10b,则VCO直接送至OUT6、OUT7和OUT8。
如果0x1E1[1:0] = 00b,则CLk直接送至OUT6、OUT7和OUT8。
如果0x1E1[1:0] = 01b,则不起作用。
占空比校正功能。
[0] = 0;使能占空比校正(默认)。
[0] = 1;禁用占空比校正。
分频器输入的时钟周期数(减1),在该期间内分频器输出保持低电平。
值0x0表示分频器在1个输入时钟周期内保持低电平(默认:0x0)。
分频器输入的时钟周期数(减1),在该期间内分频器输出保持高电平。
值0x0表示分频器在1个输入时钟周期内保持高电平(默认:0x0)。
旁路并关断分频器;输入送入分频器输出。
[7] = 0;使用分频器(默认)。
[7] = 1;旁路分频器。
忽略同步。
[6] = 0;遵从芯片级SYNC信号(默认)。
[6] = 1;忽略芯片级SYNC信号。
强制分频器输出为高电平。要求同时设置忽略SYNC。
[5] = 0;分频器输出强制为低电平(默认)。
[5] = 1;分频器输出强制为高电平。
选择时钟输出以高电平启动或以低电平启动。
[4] = 0;低电平启动(默认)。
[4] = 1;高电平启动。
[2] = 0;正常工作(默认)。
[2] = 1;关断。(通过设置此位,OUT9/OUT9、OUT10/OUT10和OUT11/OUT11也被置于
安全关断模式。)
Rev. 0 | Page 78 of 84

寄存器
地址(十
六进制)
19B [1]
19B [0]
表56. VCO分频器和CLK输入
寄存器
地址(十
六进制)
1E0 [2:0]
0 0 0
0 0 1
0 1 0
0 1 1
1 0 0
1 0 1
1 1 0
1 1 1
1E1 [4]
1E1 [3]
1E1 [2]
1E1 [1]
1E1 [0]
名称 描述
位
通道3直接至输出
禁用分频器3 DCC
名称 描述
位
VCO分频器
关断时钟输入部分 关断时钟输入部分(包括CLK缓冲器、VCO分频器和CLK树)。
关断VCO时钟接口 关断VCO与时钟分配之间的接口模块。
关断VCO和CLK 关断VCO和CLK输入。
选择VCO或CLK 选择VCO或CLK作为VCO分频器的输入。
旁路VCO分频器 旁路或使用VCO分频器。[0] = 0;使用VCO分频器(默认)。[0] = 1;旁路VCO分频器,
将OUT9、OUT10和OUT11连接到分频器3,或者直接连接到VCO或CLK。
[1] = 0;OUT9、OUT10和OUT11连接到分频器3(默认)。
[1] = 1;
如果0x1E1[1:0] = 10b,则VCO直接送至OUT9、OUT10和OUT11。
如果0x1E1[1:0] = 00b,则CLk直接送至OUT9、OUT10和OUT11。
如果0x1E1[1:0] = 01b,则不起作用。
占空比校正功能。
[0] = 0;使能占空比校正(默认)。
[0] = 1;禁用占空比校正。
[2] [1] [0] 分频比
[4] = 0;正常工作(默认)。
[4] = 1;关断。
[3] = 0;正常工作(默认)。
[3] = 1;关断。
[2] = 0;正常工作(默认)。
[2] = 1;关断。
[1] = 0;选择外部CLK作为VCO分频器的输入(默认)。
[1] = 1;选择VCO作为VCO分频器的输入,此时不能旁路VCO分频器。
要使用PLL和内部VCO,必须将此位置1。
此时无法选择VCO作为输入。
AD9520-0
2(默认)
3
4
5
6
输出静态
1(旁路)
输出静态
Rev. 0 | Page 79 of 84

AD9520-0
表 57. 系统
寄存器
地址(十
六进制)
230 [3]
230 [2]
230 [1]
230 [0]
表58. 更新所有寄存器
寄存器
地址(十
六进制)
232 [0] IO_UPDATE
名称 描述
位
禁用上电SYNC 上电同步模式。用于禁用防不良脉冲电路。
关断SYNC 关断同步功能。
关断分配参考 关断分配部分的参考。
软SYNC
名称 描述
位
[3] = 0;使能防不良脉冲电路(默认)。
[3] = 1;禁用防不良脉冲电路。
[2] = 0;SYNC功能正常工作(默认)。
[2] = 1;关断SYNC电路。
[1] = 0;分配部分的参考正常工作(默认)。
[1] = 1;关断分配部分的参考。
软SYNC位与SYNC引脚的工作方式相同,但该位的极性相反,即高电平将使选定的
通道进入预定静止状态,1到0跃迁将触发SYNC。
[0] = 0;同SYNC高电平。
[0] = 1;同SYNC低电平。
此位必须置1,才能将缓冲寄存器的内容传输到有效寄存器。这发生在下一个SCLK上升沿。此位为自清
零位,即不需要设置就能恢复为0。
[0] = 1(自清零);将所有的有效寄存器更新为缓冲寄存器的内容。
表59. EEPROM缓冲段
寄存器
地址(十
六进制)
A00 至
A16
名称 描述
位
EEPROM缓冲段
寄存器1到EEPROM
缓冲段寄存器23
EEPROM缓冲段部分存储需存储读取EEPROM的起始地址和字节数。AD9520寄存器空间不是连
续的,因此,为了存储和检索EEPROM,EEPROM控制器需要知道AD9520寄存器空间的起始地
址和字节数。此外,EEPROM控制器使用特殊指令——操作代码(即IO_UPDATE和end-of-data),
它们也存储在EEPROM缓冲段中。EEPROM缓冲段寄存器的片内默认设置方式如下:在所有寄
存器与EEPROM之间的传输完成后,发出IO_UPDATE指令。更多信息参见“EEPROM缓冲段编
程”部分。
Rev. 0 | Page 80 of 84

表 60. EEPROM 控制
寄存器
地址(十
六进制)
B00 [0]
B01 [0]
B02 [1]
B02 [0]
B03 [0]
名称 描述
位
STATUS_EEPROM
(只读)
EEPROM数据
错误(只读)
Soft_EEPROM
使能EEPROM
写入
REG2EEPROM
AD9520-0
该只读寄存器指示读写EEPROM期间,EEPROM与缓冲寄存器段之间的数据传输状态。当0x01D[7]置1时,
STATUS引脚也可提供此信号。
[0] = 0;数据传输已完成。
[0] = 1;数据传输未完成。
该只读寄存器指示EEPROM与缓冲器之间的数据传输是否发生错误。
[0] = 0;无错误。数据正确。
[0] = 1;检测到错误数据。
当EEPROM引脚接低电平时,Soft_EEPROM位置1即可利用EEPROM中保存的设置复位AD9520。
[1] = 1;用EEPROM设置进行软复位(自清零)。
使能用户写入EEPROM。
[0] = 0;使能EEPROM写保护。用户无法写入EEPROM(默认)。
[0] = 1;禁用EEPROM写保护。用户可以写入EEPROM。
将数据从缓冲寄存器传输到EEPROM(自清零)。
[0] = 1;此位置1将启动从缓冲寄存器到EEPROM的数据传输(写过程);数据传输完毕后,
2
I
C主机将其复位。
Rev. 0 | Page 81 of 84

AD9520-0
应用信息
使用AD9520进行频率规划
AD9520是一款高度灵活的PLL。选择AD9520的PLL设置和
版本时,应当注意以下几点。
AD9520有四个分频器:参考(或R)分频器、反馈(或N)分频
器、VCO分频器和通道分频器。当试图实现一个特别困
难、需要大量分频的分频比时,某些分频可以通过VCO分
频器或通道分频器执行,从而允许较高的鉴相器频率,并
且为环路带宽的选择提供更大的灵活性。
对于AD9520系列产品,较低的VCO频率一般意味着抖动
性能也略胜一筹。在AD9520系列的整个VCO频率范围
(1.4 GHz至2.95 GHz),相同输出频率下的积分抖动(12 kHz
至20 MHz偏移)之差通常小于150。如果利用VCO频率较低
的AD9520版本能够实现所需的频率,则选择频率较低的器
件可实现最佳的相位噪声和最低的抖动。然而,选择VCO
频率较高的器件可提高频率规划的灵活性。
关于电荷泵电流,设计人员应选择位于容许范围中间的标
称电荷泵电流作为起点,以便提高或降低电荷泵电流,从
而沿任一方向精调PLL环路带宽。
ADIsimCLK是一款功能强大的PLL建模工具,可以从
www.analog.com下载,它能精确地确定给定应用的最佳环
路滤波器。
在ADC时钟应用中使用AD9520输出
高速ADC对AD9520采样时钟的质量极为敏感。ADC可以
看作一个采样混频器,时钟上的任何噪声、失真或时间抖
动都会与模数转换输出端的目标信号合并。时钟完整性要
求随着模拟输入频率和分辨率的提高而提高,要求最苛刻
的是14位分辨率以上的高模拟输入频率应用。ADC的理论
信噪比(SNR)受ADC分辨率和采样时钟抖动限制。考虑一
个无限分辨率的理想ADC,步进大小和量化误差可忽略不
计,则可用SNR可以近似表示为:
其中:
f
为需要被数字化的最高模拟频率。
A
t
为采样时钟的均方根抖动。
J
图69显示出采样时钟抖动与模拟频率和有效位数(ENOB)的
函数关系。
110
100
90
80
70
SNR (dB)
60
50
40
30
10 1k100
f
A
(MHz)
SNR = 20log
t
J
=
1
0
t
J
=
2
0
t
J
=
4
0
t
J
=
1
p
t
J
=
2
p
t
J
=
1
0
2πf
0
f
s
0
f
s
0
f
s
s
s
p
s
18
1
AtJ
16
14
12
ENOB
10
8
6
07213-044
图69. SNR和ENOB与模拟输入频率的关系
参见应用笔记AN-756和AN-501 (www.analog.com)。
许多高性能ADC均提供差分时钟输入功能,以简化在嘈杂
的PCB上提供所需低抖动时钟的任务。(对嘈杂的PCB的单
端时钟进行分配可导致在采样时钟信号中产生耦合噪声。
差分分配具有共模抑制特性,可在嘈杂的环境下提供优越
的时钟性能。)利用AD9520差分LVPECL输出提供的时钟,
可以最大程度地提高转换器的信噪比性能。
在选择最佳时钟/转换器解决方案时,要考虑ADC的输入
需求(差分或单端、逻辑电平终端)。
LVPECL时钟分配
在AD9520的所有输出中,LVPECL输出提供的时钟信号抖
动最低。LVPECL输出(射极开路)要求直流端接以偏置输出
晶体管。图53显示了LVPECL输出级的简化等效电路。
在多数应用中,建议使用LVPECL远端戴维宁端接(见图70)
或Y型端接(见图71)。无论何种情况,接收缓冲器的V
配VS_DRV。如果不匹配,建议使用交流耦合(见图72)。
LVPECL Y型端接是一种有效的端接方案,使用的元件最
少,并且同时提供奇数模式和偶数模式的阻抗匹配。在高
频时,对于紧密耦合的传输线路,偶数模式阻抗匹配是一
个重要的考虑。它的一个主要缺点是不能灵活地改变射极
跟随器LVPECL驱动器的驱动强度。当驱动长走线时,这
可能是一个重要考虑,但通常不是问题。如果VS_DRV = 2.5 V,
则图71所示的50 Ω接地端接电阻应变为19 Ω。
应匹
S
Rev. 0 | Page 82 of 84

V
V
V
V
V
V
Ω
AD9520-0
戴维宁等效端接使用电阻网络提供50 Ω端接,连接到低于
LVPECL驱动器V
VS_DRV应等于接收缓冲器的V
的直流电压。这种情况下,AD9520的
OL
。虽然所示的电阻组合产
S
生 VS_DRV − 2 V的直流偏置点,但实际共模电压为
VS_DRV − 1.3 V,因为有额外电流从AD9520 LVPECL驱
动器流经下拉电阻。
当VS_DRV = 2.5 V时,电路相同,但下拉电阻变为62.5 Ω,
上拉电阻变为250 Ω。
S_DRV
VS_DRV
LVPECL
50Ω
SINGLE-ENDED
(NOT COUPLED)
50Ω
图70. 直流耦合的3.3 V LVPECL远端戴维宁端接
S_DRV
Z0 = 50Ω
LVPECL
Z0 = 50Ω
50Ω
图71. 直流耦合的3.3 V LVPECL Y型端接
S_DRV
LVPECL
200Ω 200Ω
0.1nF
100Ω DIFFERENTIAL
0.1nF
TRANSMISSION LINE
(COUPLED)
127Ω127Ω
83Ω83Ω
50Ω
50Ω
100Ω
V
S
LVPECL
= VS_DR
S
LVPECL
S
LVPECL
7213-045
07213-047
通常需要源端的串联端接电阻提供传输线匹配和/或降低驱
动器的瞬态电流。
电阻值由电路板设计及时序要求决定;典型值为10 Ω至
100 Ω。另外,CMOS输出还会受能驱动的容性负载或走线
长度的限制。通常,建议将走线长度控制在3英寸以内,
以保持信号上升/下降时间和信号完整性。
60.4
(1.0 INCH)
10Ω
CMOS CMOS
MICROSTRIP
07213-076
图73. CMOS输出的串行端接
PCB走线远端的终端是第二选项。AD9520的CMOS输出无
法提供足够的电流,来为低阻抗远端终端提供全电压摆幅
(见图74)。远端终端网络应与PCB走线的阻抗相匹配并提
供所需开关点。信号摆幅降低后仍可以满足某些应用对接
收器输入的需求。在不太重要的网络中驱动长走线时,这
一点非常有用。
V
S
10Ω
CMOS CMOS
50Ω
100Ω
100Ω
07213-077
图74. 远端终端CMOS输出
由于单端CMOS时钟的限制,在长走线上驱动高速信号
时,需考虑使用差分输出。AD9520能提供LVPECL输出,
因此,当差分信号的固有抗扰度能够提供出色的时钟转换
性能时,该器件能较好地驱动长走线。
07213-046
图72. 交流耦合LVPECL和并行传输线
CMOS时钟分配
AD9520的输出驱动器可以配置为CMOS驱动器。用作
CMOS驱动器时,各路输出变为一对CMOS输出,各CMOS
输出可以独立开启或关闭,以及设置为反相或同相。这些
输出与3.3 V或2.5 V CMOS兼容。然而,各输出驱动器(包
括LVPECL)必须采用2.5 V或3.3 V电源供电。用户不能混用
2.5 V和3.3 V输出。
采用单端CMOS时钟时,适用以下准则:
如果可能的话,应设计点对点连接,使得每个驱动器仅与
一个接收器对应。以这种方式连接输出引脚可以简化终端
方案并降低因输出走线的阻抗不匹配而导致的响铃振荡。
Rev. 0 | Page 83 of 84

AD9520-0
外形尺寸
PIN 1
INDICATOR
9.00
BSC SQ
TOP VIEW
8.75
BSC SQ
0.60
MAX
0.50
BSC
49
48
0.60 MAX
EXPOSED PAD
(BOTTOM VIEW)
PIN 1
64
INDICATOR
1
6.35
6.20 SQ
6.05
1.00
0.85
0.80
SEATING
PLANE
12° MAX
0.50
0.40
0.30
0.80 MAX
0.65 TYP
0.30
0.23
0.18
COMPLIANT TO JEDEC STANDARDS MO-220-VMMD-4
0.05 MAX
0.02 NOM
0.20 REF
33
32
7.50
REF
16
17
FOR PROPER CONNECTION OF
THE EXPOSED PAD, REFER TO
THE PIN CONFIGURATION AND
FUNCTION DESCRIPTIONS
SECTION OF THIS DATA SHEET.
0.25 MIN
091707-C
图75. 64引脚LFCSP_VQ[引脚架构芯片级]封装
9 mm x 9 mm , 超薄体
CP-64-4
图示尺寸单位:mm
订购指南
型号 温度范围 封装描述 封装选项
AD9520-0BCPZ
AD9520-0BCPZ-REEL7
AD9520-0/PCBZ
1
Z = 符合RoHS标准的器件。
1
1
−40°C至+85°C
1
CP-64-4
−40°C至+85°C
64引脚引脚架构芯片级封装(LFCSP_VQ)
64引脚引脚架构芯片级封装(LFCSP_VQ)
评估板
CP-64-4
©2011 Analog Devices, Inc. All rights reserved. Trademarks and
registered trademarks are the property of their respective owners.
D07213sc-0-10/11(0)
Rev. 0 | Page 84 of 84
 Loading...
Loading...