

450 MHz, Triple 16 × 9
VNEG
V
FEATURES
Large, triple 16 × 9 high speed, non-blocking switch array
Pin compatible with
AD8177, AD8178 (16 × 5 switch arrays)
Differential or single-ended operation
Supports sync-on common-mode and sync-on color
operating modes
RGB and HV outputs available for driving monitor directly
G = +4 operation (differential input to differential output)
Flexible power supplies: +5 V or ±2.5 V
Logic ground for convenient control interface
Serial or parallel programming of switch array
High impedance output disable allows connection of
multiple devices with minimal loading on output bus
Adjustable output CM and black level through external pins
Excellent ac performance
Bandwidth: 450 MHz
Slew rate: 1650 V/μs
Settling time: 4 ns to 1% to support 1600 × 1200 @ 85 Hz
Low power of 3.5 W
Low all hostile crosstalk
−82 dB @ 5 MHz
−47 dB @ 500 MHz
Wide input common-mode range of 4 V
Reset pin allows disabling of all outputs
Fully populated 26 × 26 ball PBGA package
(27 mm × 27 mm, 1 mm ball pitch)
Convenient grouping of RGB signals for easy routing
APPLICATIONS
RGB video switching
KVM
Professional video
AD8175 (16 × 9 switch array) and
SERIN
SER/PAR
WE
CLK
CS
UPDATE
RST
CMENC
R
G
B
16 x RGB
CHANNELS
R
G
B
Video Crosspoint Switch
AD8176
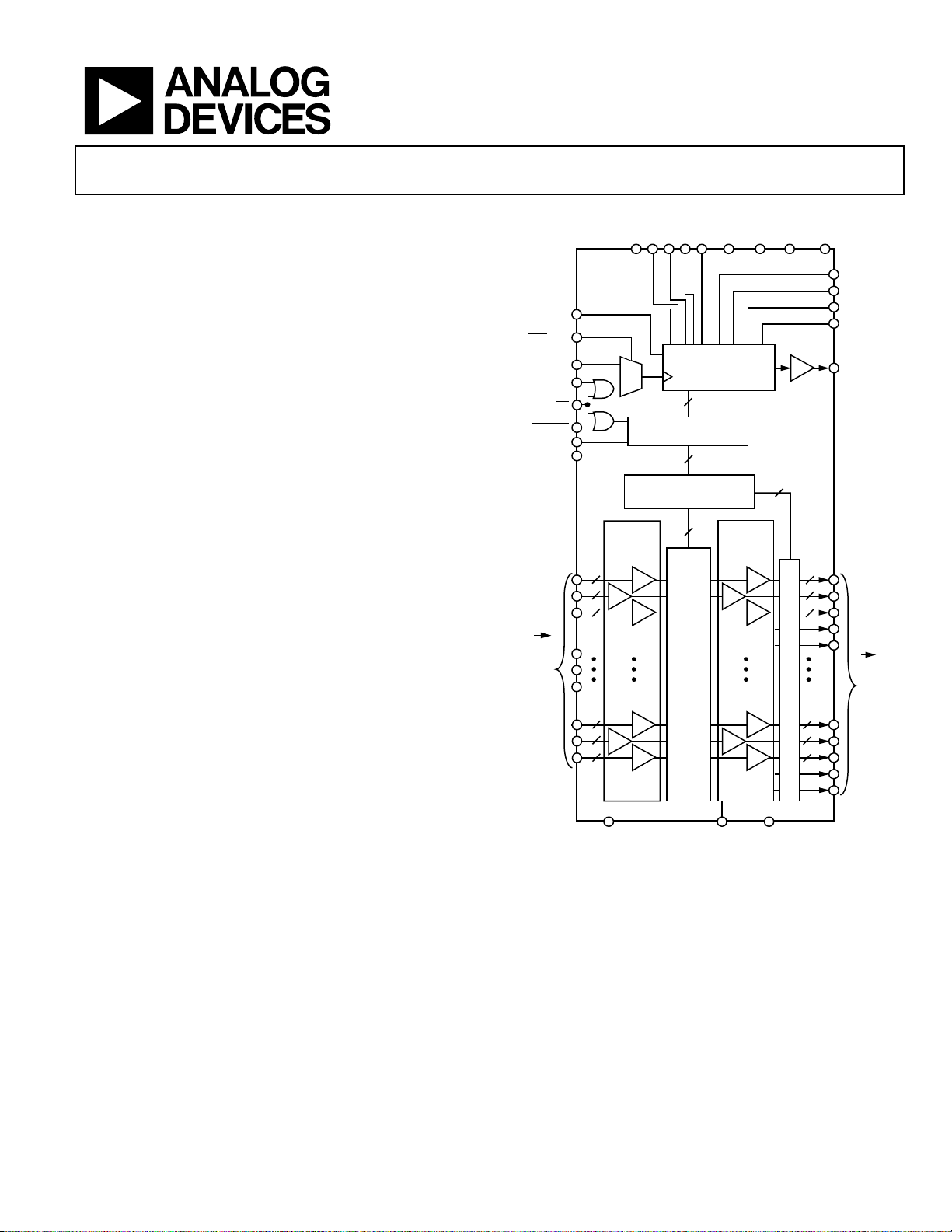
FUNCTIONAL BLOCK DIAGRAM
D0 D1 D2 D3 D4VPOS
AD8176
45-BIT SHIFT
1
0
INPUT
RECEIVER
G = +2
2
2
2
2
2
2
VBLK VOCM_CMENCON VOCM_CMENCOF F
REGISTER WITH
5-BIT PARALL EL
LOADING
45
PARALLEL L ATCH
45
DECODE
9 × 5:16 DECODERS
144
SWITCH
MATRIX
G = +2
OUTPUT
BUFFER
G = +1
Figure 1. AD8176
DD
DGND
A0
A1
A2
A3
SEROUT
9
SET INDIVIDUAL, OR
RESET ALL OUTPUTS TO OFF
2
2
2
ENABLE/DISABLE
2
2
2
R
G
B
H
V
R
G
B
H
V
9 x RGB, HV
CHANNELS
06596-001
GENERAL DESCRIPTION
The AD8176 is a high speed, triple 16 × 9 video crosspoint
switch matrix. It supports 1600 × 1200 RGB displays @ 85 Hz
refresh rate, by offering a 450 MHz bandwidth and a slew rate
of 1650 V/µs. With −82 dB of crosstalk and −90 dB isolation
(@ 5 MHz), the AD8176 is useful in many high speed video
applications.
The AD8176 supports two modes of operation: differential-in
to differential-out mode with sync-on CM signaling passed
through the switch and differential-in to differential-out mode
with CM signaling removed through the switch. The output
Rev. 0
Information furnished by Analog Devices is believed to be accurate and reliable. However, no
responsibility is assumed by Anal og Devices for its use, nor for any infringements of patents or ot her
rights of third parties that may result from its use. Specifications subject to change without notice. No
license is granted by implication or otherwise under any patent or patent rights of Analog Devices.
Trademarks and registered trademarks are the property of their respective owners.
CM and black level can be conveniently set via external pins.
The outputs can be used single-ended in conjunction with
decoded H and V outputs to drive a monitor directly.
The independent output buffers of the AD8176 can be placed
into a high impedance state to create larger arrays by paralleling
crosspoint outputs. Inputs can be paralleled as well. The AD8176
offers both serial and a parallel programming modes.
The AD8176 is packaged in a fully populated 26 × 26 ball
PBGA package and is available over the extended industrial
temperature range of −40°C to +85°C.
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781.329.4700 www.analog.com
Fax: 781.461.3113 ©2007 Analog Devices, Inc. All rights reserved.

AD8176
TABLE OF CONTENTS
Features.............................................................................................. 1
Applications....................................................................................... 1
Functional Block Diagram .............................................................. 1
General Description ......................................................................... 1
Revision History ............................................................................... 2
Specifications..................................................................................... 3
Timing Characteristics (Serial Mode) ....................................... 5
Timing Characteristics (Parallel Mode).................................... 6
Absolute Maximum Ratings............................................................ 7
Thermal Resistance ...................................................................... 7
Power Dissipation......................................................................... 7
ESD Caution.................................................................................. 7
REVISION HISTORY
7/07—Revision 0: Initial Version
Pin Configurations and Function Descriptions............................8
Truth Table and Logic Diagram ............................................... 17
Equivalent Circuits......................................................................... 19
Typical Performance Characteristics........................................... 21
Theory of Operation ...................................................................... 26
Applications..................................................................................... 27
Operating Modes........................................................................ 27
Programming.............................................................................. 28
Differential and Single-Ended Operation............................... 29
Outline Dimensions....................................................................... 38
Ordering Guide .......................................................................... 38
Rev. 0 | Page 2 of 40
AD8176
SPECIFICATIONS
VS = ± 2.5 V at TA = 25°C, G = +4, RL = 100 Ω (each output), VBLK = 0 V, output CM voltage = 0 V, differential I/O mode, unless
otherwise noted.
Table 1.
Parameter Conditions Min Typ Max Unit
DYNAMIC PERFORMANCE
−3 dB Bandwidth 200 mV p-p 450 MHz
2 V p-p 420 MHz
Gain Flatness 0.1 dB, 200 mV p-p 17 MHz
Propagation Delay 2 V p-p 1.3 ns
Settling Time 1% , 2 V step 4 ns
Slew Rate, Differential Output 2 V step 1650 V/μs
2 V step, 10% to 90% 1450 V/μs
Slew Rate, RGB Common Mode 1 V step , 10% to 90% 300 V/μs
Slew Rate, HV Outputs Rail-to-rail, TTL load 400 V/μs
NOISE/DISTORTION PERFORMANCE
Crosstalk, All Hostile f = 5 MHz −82 dB
f = 10 MHz −74 dB
f = 100 MHz −56 dB
f = 500 MHz −47 dB
Off Isolation, Input-Output f = 10 MHz, RL = 100 Ω, one channel −90 dB
Input Voltage Noise 0.01 MHz to 50 MHz 50 nV/√Hz
DC PERFORMANCE
Gain Error 1 %
Gain Matching R, G, B same channel 0.5 %
Gain Temperature Coefficient 32 ppm/°C
OUTPUT CHARACTERISTICS
Output Offset Voltage CMENC on or off 20 mV
Temperature coefficient 58 μV/°C
Output Offset Voltage,
RGB Common Mode
Temperature coefficient −16 μV/°C
Output Impedance Enabled, differential 1.5 Ω
Disabled, differential 2.7 kΩ
Output Disable Capacitance Disabled 2 pF
Output Leakage Current Disabled 1 μA
Output Voltage Range No load, differential 4 V p-p
Output Current Short circuit 45 mA
INPUT CHARACTERISTICS
Input Voltage Range,
Differential Mode
Input Voltage Range,
Common Mode
CMR, RGB Input ΔV
ΔV
CM Gain, RGB Input ΔV
ΔV
Input Capacitance Any switch configuration 2 pF
Input Resistance Differential 3.33 kΩ
Input Offset Current 1 μA
CMENC on or off 10 mV
1 V p-p
V
= 1 V p-p ±2.25 V p-p
IN
/ΔV
, ΔV
OUT, DM
OUT, DM
OUT, CM
OUT, CM
/ΔV
/ΔV
/ΔV
IN, CM
IN, CM
IN, CM
IN, CM
= ±0.5 V, CMENC off –62 dB
IN, CM
, ΔV
= ±0.5 V, CMENC on −45 dB
IN, CM
, ΔV
= ±0.5 V CMENC off −70 dB
IN, CM
, ΔV
= ±0.5 V, CMENC on 0 dB
IN, CM
Rev. 0 | Page 3 of 40
AD8176
Parameter Conditions Min Typ Max Unit
SWITCHING CHARACTERISTICS
Enable On Time
Switching Time, 2 V Step
UPDATE to 50% output
50%
UPDATE to 50% output
50%
POWER SUPPLIES
Supply Current V
, outputs enabled, no load 600 mA
POS
Outputs disabled 290 mA
V
, outputs enabled, no load 600 mA
NEG
Outputs disabled 290 mA
D
, outputs enabled, no load 4 mA
VDD
Supply Voltage Range 4.5 to 5.5 V
PSR ΔV
ΔV
OUT, DM
OUT, DM
/ΔV
/ΔV
POS
NEG
, ΔV
= ±0.5 V −55 dB
POS
, ΔV
= ±0.5 V −55 dB
NEG
OPERATING TEMPERATURE RANGE
Temperature Range Operating (still air) −40 to +85 °C
θJA Operating (still air) 15 °C/W
80 ns
70 ns
Rev. 0 | Page 4 of 40
AD8176
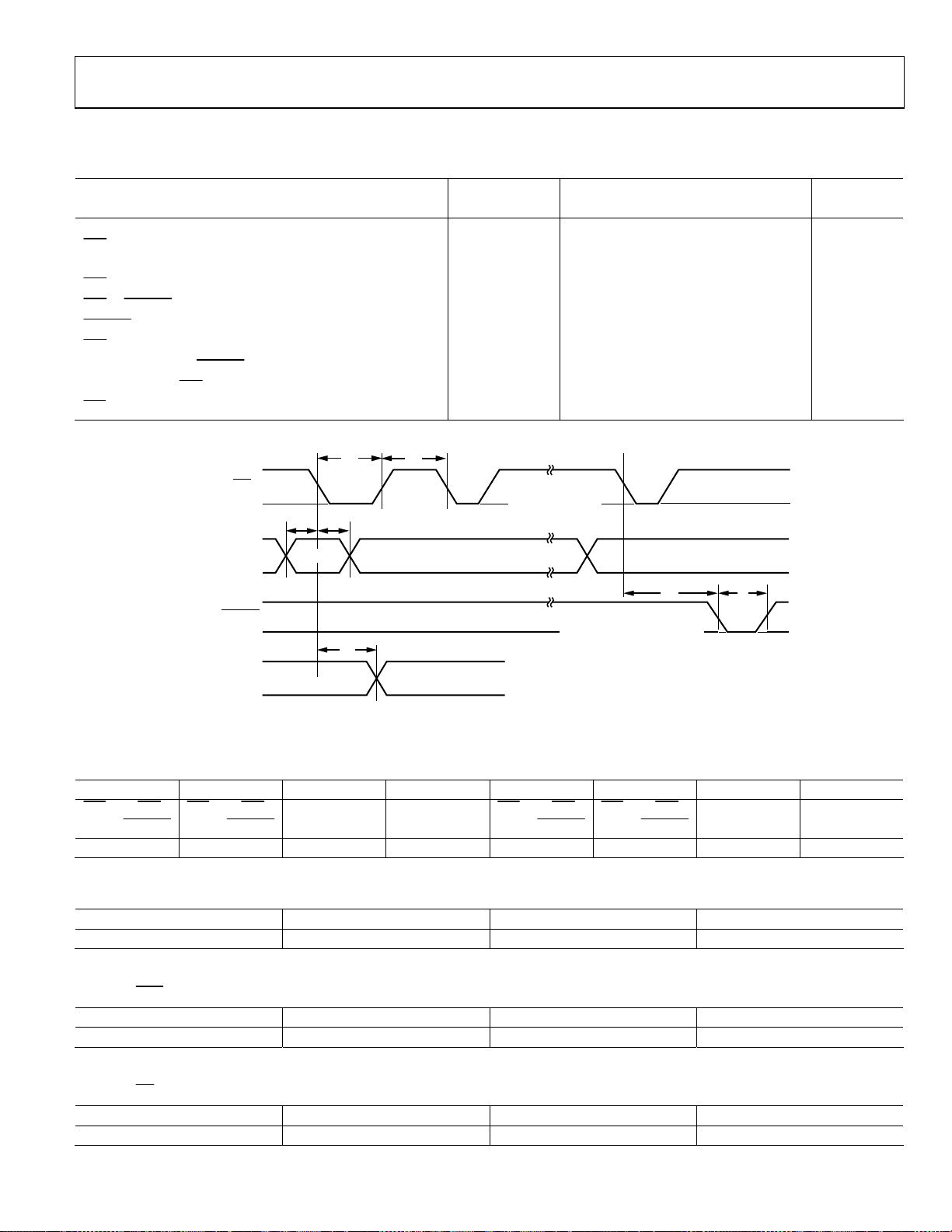
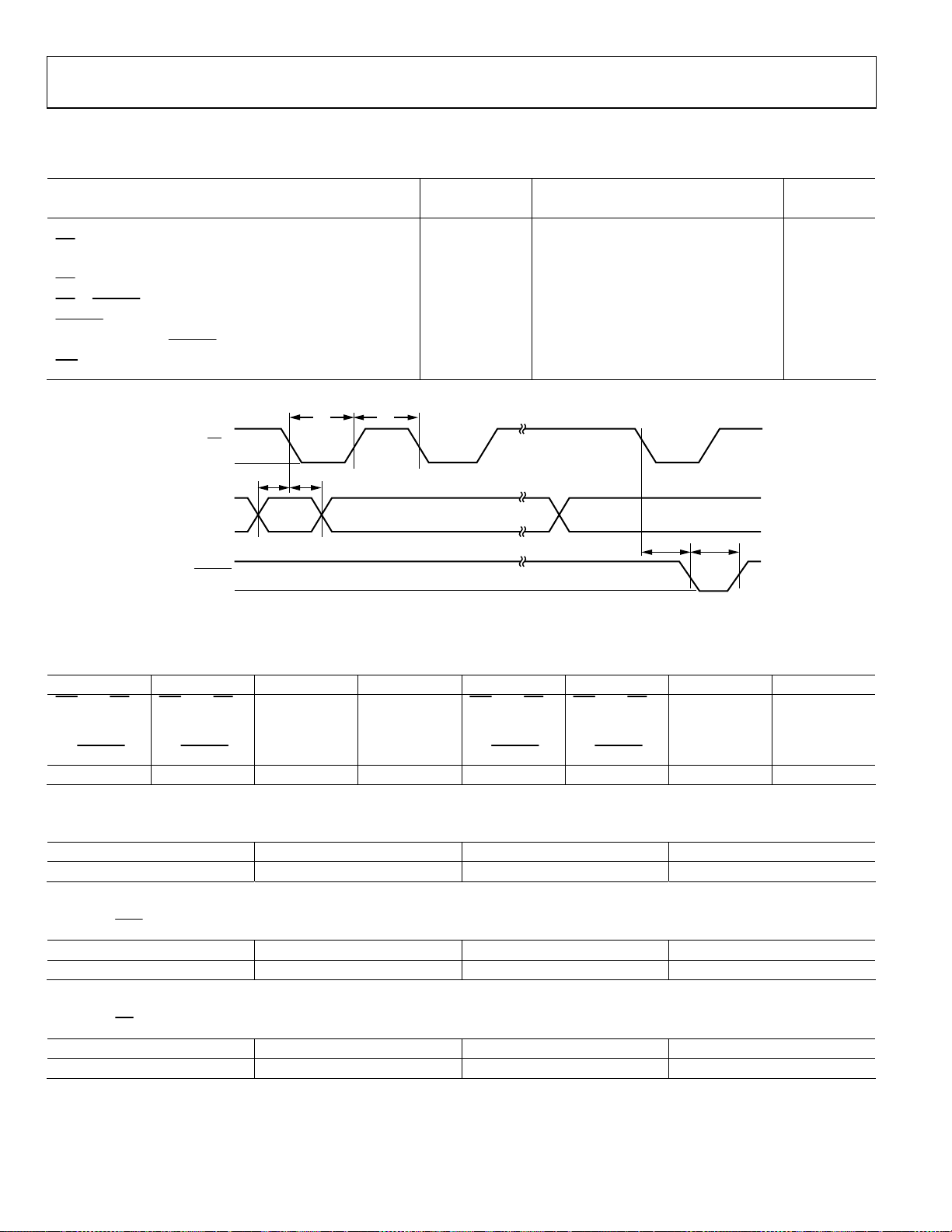
TIMING CHARACTERISTICS (SERIAL MODE)
Table 2.
Limit
Parameter Symbol Min Typ Max Unit
Serial Data Setup Time t1 40 ns
t
CLK Pulse Width
Serial Data Hold Time t3 50 ns
CLK Pulse Separation
CLK to UPDATE Delay
UPDATE Pulse Width
CLK to SEROUT Valid
Propagation Delay, UPDATE to Switch On
Data Load Time, CLK = 5 MHz, Serial Mode
RST Time
CLK
SERIN
1 = LATCHED
UPDATE
0 = TRANSPARENT
SEROUT
t
1
0
t1t
1
OUT8 (D4)
0
2
3
t
7
t
4
Figure 2. Timing Diagram, Serial Mode
60 ns
2
t
140 ns
4
t
10 ns
5
t
90 ns
6
t
120 ns
7
80 ns
9 μs
140 200 ns
LOAD DATA INTO
SERIAL REGISTER
ON FALLING EDGE
OUT8 (D3) OUT00 (D0)
t
5
TRANSFER DATA FROM SERIAL
REGISTER TO PARALLEL
LATCHES DURING LOW LEVEL
t
6
06596-002
Table 3. Logic Levels, V
VIH VIL V
SER/PAR, CLK,
SERIN, UPDATE
SER/PAR, CLK,
SERIN, UPDATE
= 3.3 V
DD
V
OH
I
OL
SEROUT SEROUT
I
IH
SER/PAR, CLK,
SERIN, UPDATE
I
IL
SER/PAR, CLK,
SERIN, UPDATE
I
OH
OL
SEROUT SEROUT
2.0 V min 0.6 V max 2.8 V min 0.4 V max 20 μA max –20 μA max –1 mA min 1 mA min
Table 4. H and V Logic Levels, V
VOH VOL I
= 3.3 V
DD
I
OH
OL
2.7 V min 0.5 V max –3 mA max 3 mA max
Table 5.
VIH VIL I
RST
Logic Levels, VDD = 3.3 V
I
IH
IL
2.0 V min 0.6 V max −60 μA max −120 μA max
Table 6.
VOH VOL I
CS
Logic Levels, VDD = 3.3 V
I
IH
OL
2.0 V min 0.6 V max 100 μA max 40 μA max
Rev. 0 | Page 5 of 40
AD8176
TIMING CHARACTERISTICS (PARALLEL MODE)
Table 7.
Limit
Parameter Symbol Min Typ Max Unit
Parallel Data Setup Time t1 80 ns
t
WE Pulse Width
Parallel Hold Time t3 150 ns
WE Pulse Separation
WE to UPDATE Delay
UPDATE Pulse Width
Propagation Delay, UPDATE to Switch On
RST Time
WE
D0 TO D4
A0 TO A3
1 = LATCHED
0 = TRANSPARENT
UPDATE
t
1
0
t1t
1
0
2
3
t
4
Figure 3. Timing Diagram, Parallel Mode
110 ns
2
t
90 ns
4
t
10 ns
5
t
90 ns
6
80 ns
140 200 ns
t
t
5
6
06596-003
Table 8. Logic Levels, V
VIH VIL V
SER/PAR, WE,
D0, D1, D2, D3,
D4, A0, A1, A2,
A3,
UPDATE
SER/PAR, WE,
D0, D1, D2, D3,
D4, A0, A1, A2,
A3,
= 3.3 V
DD
UPDATE
V
OH
I
OL
SEROUT SEROUT
I
IH
SER/PAR, WE,
D0, D1, D2, D3,
D4, A0, A1, A2,
A3,
UPDATE
I
IL
SER/PAR, WE,
D0, D1, D2, D3,
D4, A0, A1, A2,
A3,
UPDATE
I
OH
OL
SEROUT SEROUT
2.0 V min 0.6 V max Disabled Disabled 20 μA max −20 μA max Disabled Disabled
Table 9. H and V Logic Levels, V
VOH VOL I
= 3.3 V
DD
I
OH
OL
2.7 V min 0.5 V max –3 mA max 3 mA max
RST
Table 10.
VIH VIL I
Logic Levels, VDD = 3.3 V
I
IH
IL
2.0 V min 0.6 V max −60 μA max −120 μA max
Table 11.
VOH VOL I
CS
Logic Levels, VDD = 3.3 V
I
IH
OL
2.0 V min 0.6 V max 100 μA max 40 μA max
Rev. 0 | Page 6 of 40
AD8176
ABSOLUTE MAXIMUM RATINGS
Table 12.
Parameter Rating
Analog Supply Voltage (V
Digital Supply Voltage (VDD – D
Ground Potential Difference
– D
(V
NEG
GND
)
Maximum Potential Difference
(V
– V
NEG
)
DD
Common-Mode Analog Input Voltage
– V
POS
) +6 V
NEG
) +6 V
GND
+0.5 V to –2.5 V
+8 V
– 0.5 V)
(V
NEG
+ 0.5 V)
to (V
POS
Differential Analog Input Voltage ±2 V
Digital Input Voltage VDD
Output Voltage
(V
POS
– 1 V) to (V
NEG
+ 1 V)
(Disabled Analog Output)
Output Short-Circuit Duration Momentary
Storage Temperature −65°C to +125°C
Operating Temperature Range −40°C to +85°C
Lead Temperature Range
300°C
(Soldering 10 sec)
Junction Temperature 150°C
Stresses above those listed under Absolute Maximum Ratings
may cause permanent damage to the device. This is a stress
rating only; functional operation of the device at these or any
other conditions above those indicated in the operational
section of this specification is not implied. Exposure to absolute
maximum rating conditions for extended periods may affect
device reliability.
THERMAL RESISTANCE
θJA is specified for the worst-case conditions, that is, a device
soldered in a circuit board for surface-mount packages.
Table 13. Thermal Resistance
Package Type θJA Unit
PBGA 15 °C/W
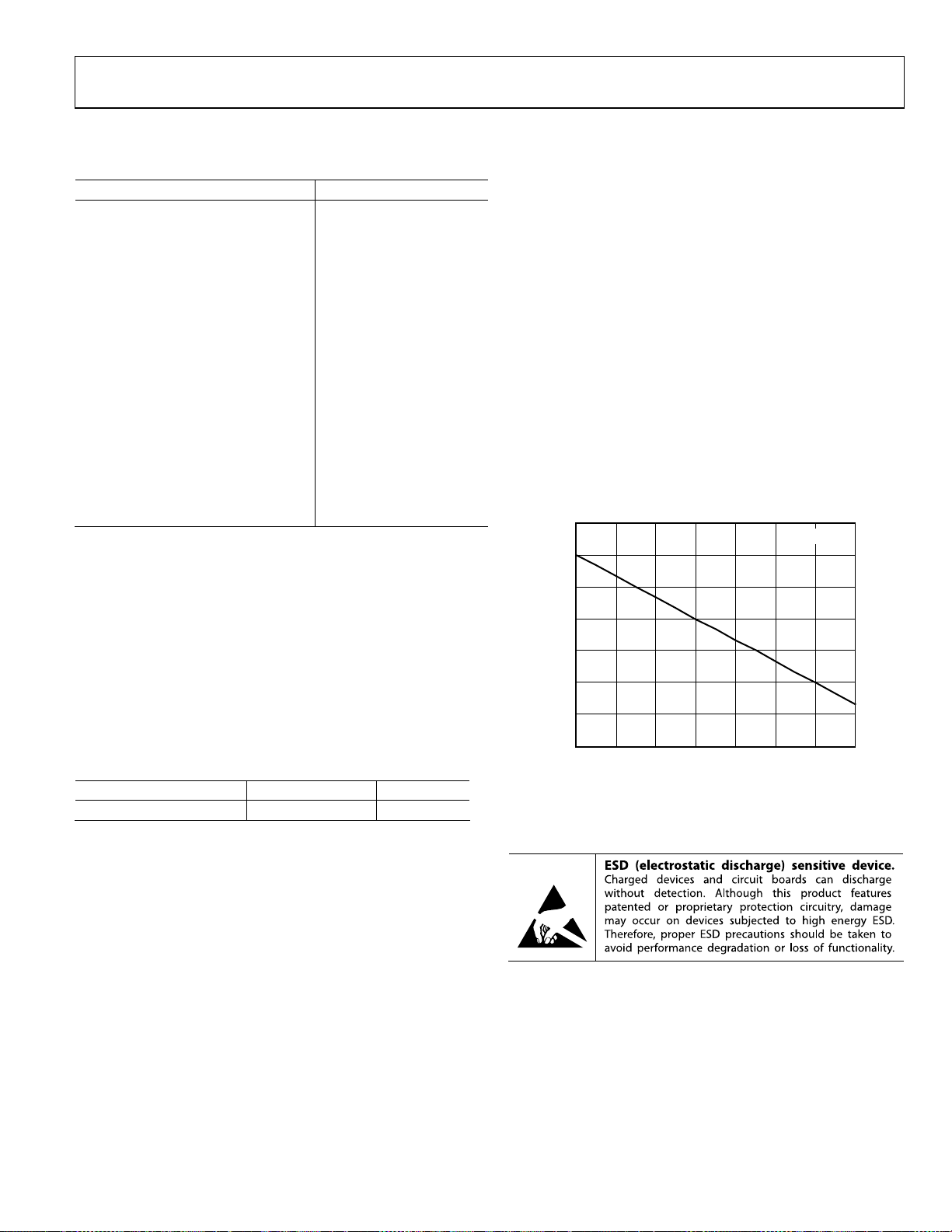
POWER DISSIPATION
The AD8176 is operated with ±2.5 V or +5 V supplies and
can drive loads down to 100 , resulting in a large range of
possible power dissipations. For this reason, extra care must
be taken derating the operating conditions based on ambient
temperature.
Packaged in a 676-lead BGA, the AD8176 junction-to-ambient
thermal impedance (θ
the maximum allowed junction temperature of the die should
not exceed 150°C. Temporarily exceeding this limit may cause a
shift in parametric performance due to a change in stresses
exerted on the die by the package. Exceeding a junction temperature of 175°C for an extended period can result in device
failure.
Figure 4 shows the range of allowed internal die power
dissipations that meet these conditions over the −40°C to +85°C
ambient temperature range. When using
external load power in the Maximum Power calculation, but do
include load current dropped on the die output transistors.
10
9
8
7
6
5
MAXIMUM POWER (W)
4
3
15 25 35 45 55 65 75 85
Figure 4. Maximum Die Power Dissipation vs. Ambient Temperature
) is 15°C/W. For long-term reliability,
JA
Tabl e 1 3 , do not include
TJ = 150°C
AMBIENT TEMPERATURE (°C)
06596-004
ESD CAUTION
Rev. 0 | Page 7 of 40
AD8176
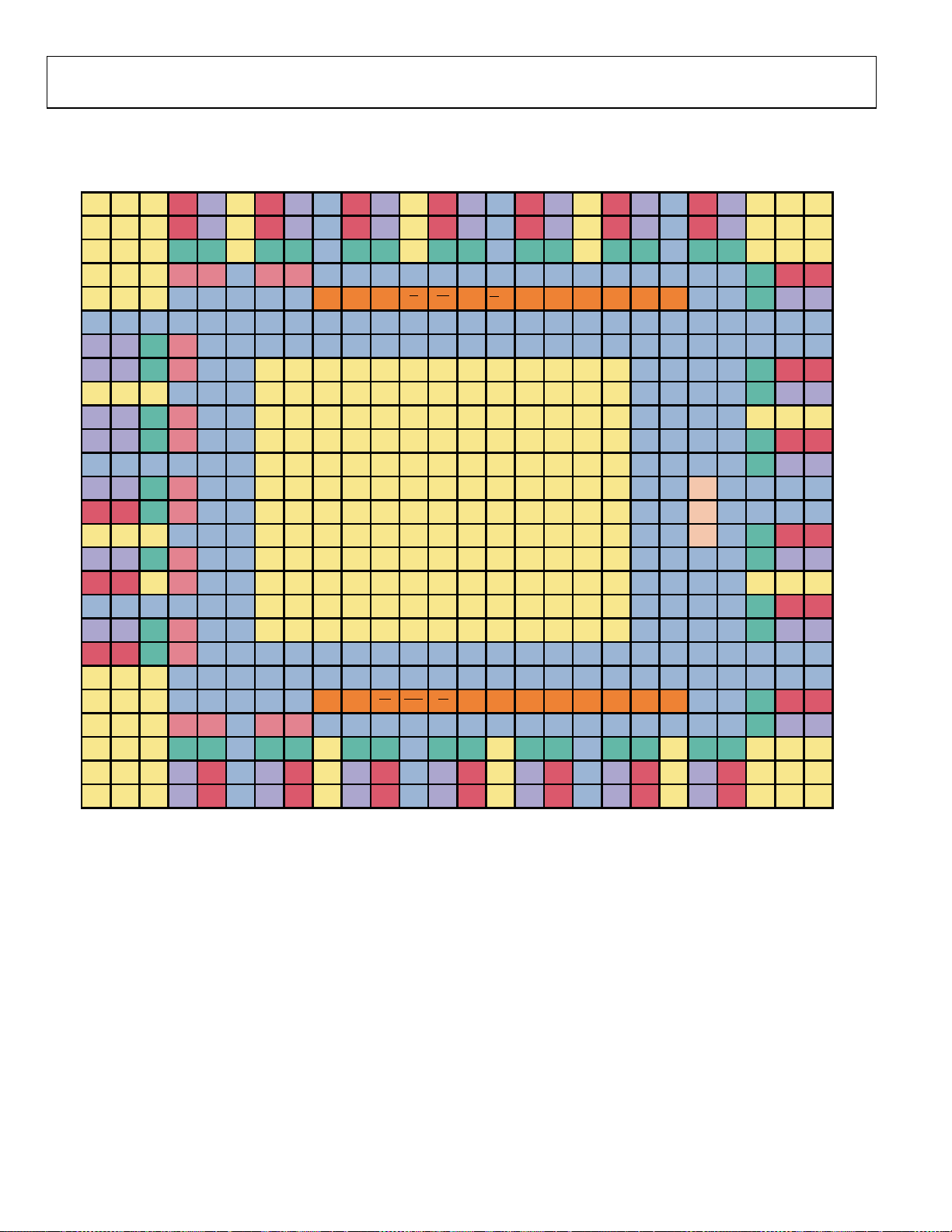
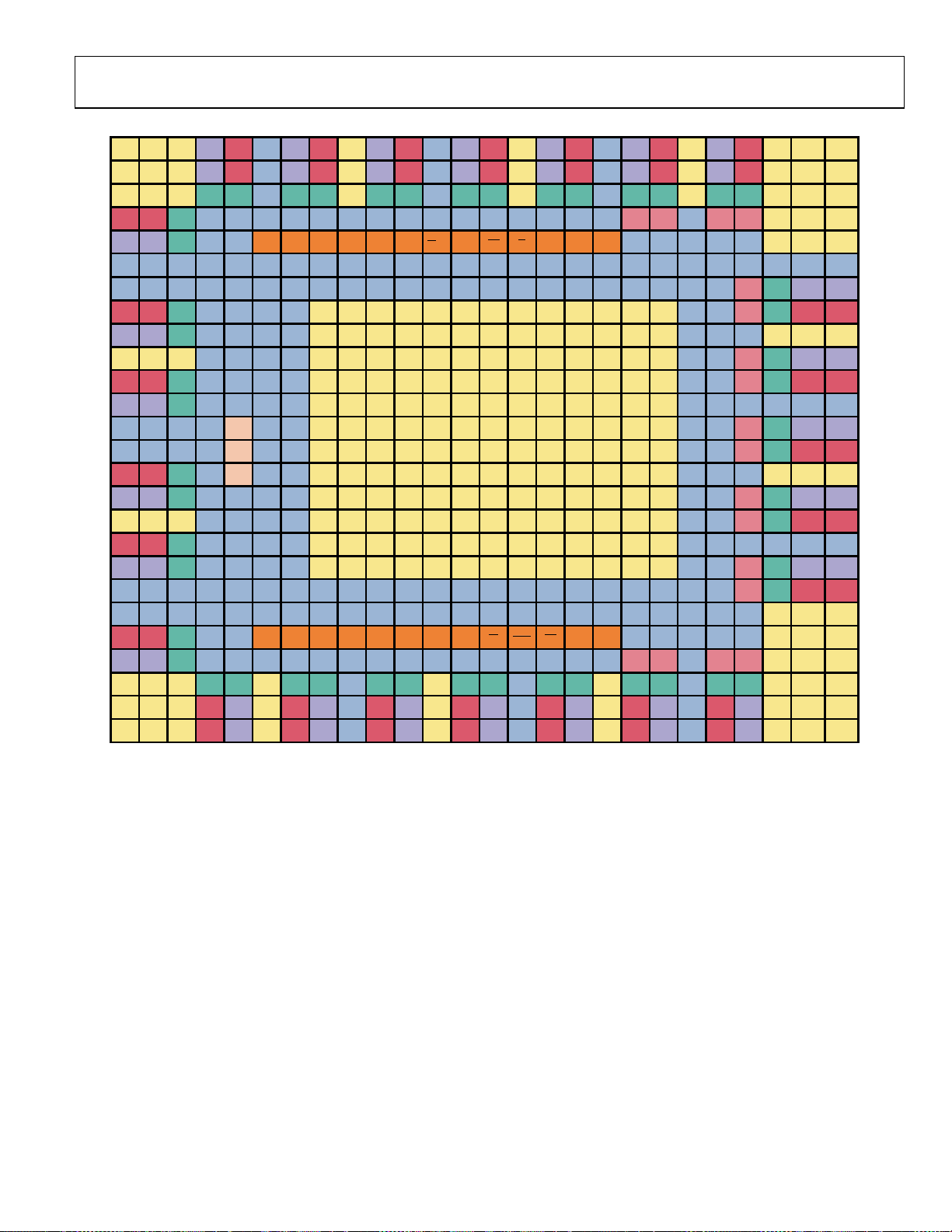
PIN CONFIGURATIONS AND FUNCTION DESCRIPTIONS
2625242322212019181716151413121110987654321
VNEG VNEG VNEG OPR7 ONB7 VNEG OPR8 ONB8 VPOS IPR8 INB8 VNEG IPR9 INB9 VPOS IPR10 INB10 VNEG IPR11 INB11 VPOS IPR12 INB12 VNEG VNEG VNEG
A
VNEG VNEG VNEG ONR7 OPB7 VNEG ONR8 OPB8 VPOS INR8 IPB8 VNEG INR9 IPB9 VPOS INR10 IPB10 VNEG INR11 IPB11 VPOS INR12 IPB12 VNEG VNEG VNEG
B
VNEG VNEG VNEG OPG7 ONG7 VNEG OPG8 ONG8 VPOS IPG8 ING8 VNEG IPG9 ING9 VPOS IPG10 ING10 VNEG IPG11 ING11 VPOS IPG12 ING12 VNEG VNEG VNEG
C
VNEG VNEG VNEG H7 V7 VPOS H8 V8 VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS IPG13 INR13 IPR13
D
VNEG VNEG VNEG VPOS VPOS VPOS VPOS VPOS DGND VDD
E
VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS
F
ONB6 OPB6 ONG6 V6 VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS
G
OPR6 ONR6 OPG6 H6 VPOS VPOS VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VPOS VPOS VPOS VPOS IPG14 INR14 IPR14
H
VNEG VNEG VNEG VPOS VPOS VPOS VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VPOS VPOS VPOS VPOS ING14 IPB14 INB14
J
ONB5 OPB5 ONG5 V5 VPOS VPOS VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VPOS VPOS VPOS VPOS VNEG VNEG VNEG
K
OPR5 ONR5 OPG5 H5 VPOS VPOS VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VPOS VPOS VPOS VPOS IPG15 INR15 IPR15
L
VPOS VPOS VPOS VPOS VPOS VPOS VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VPOS VPOS VPOS VPOS ING15 IPB15 INB15
M
ONB4 OPB4 ONG4 V4 VPOS VPOS VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VPOS VPOS VPOS VPOS VPOS VPOS
N
OPR4 ONR4 OPG4 H4 VPOS VPOS VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VPOS VPOS VBLK VPOS VPOS VPOS VPOS
P
VNEG VNEG VNEG VPOS VPOS VPOS VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VPOS VPOS VPOS IPG7 INR7 IPR7
R
ONB3 OPB3 ONG3 V3 VPOS VPOS VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VPOS VPOS VPOS VPOS ING7 IPB7 INB7
T
OPR3 ONR3 OPG3 H3 VPOS VPOS VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VPOS VPOS VPOS VPOS VNEG VNEG VNEG
U
VPOS VPOS VPOS VPOS VPOS VPOS VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VPOS VPOS VPOS VPOS IPG6 INR6 IPR6
V
ONB2 OPB2 ONG2 V2 VPOS VPOS VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VPOS VPOS VPOS VPOS ING6 IPB6 INB6
W
OPR2 ONR2 OPG2 H2 VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS
Y
VNEG VNEG VNEG VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS
AA
VNEG VNEG VNEG VPOS VPOS VPOS VPOS VPOS DGND VDD RST
AB
VNEG VNEG VNEG V1 H1 VPOS V0 H0 VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS ING5 IPB5 INB5
AC
VNEG VNEG VNEG ONG1 OPG1 VPOS ONG0 OPG0 VNEG ING0 IPG0 VPOS ING1 IPG1 VNEG ING2 IPG2 VPOS ING3 IPG3 VNEG ING4 IPG4 VNEG VNEG VNEG
AD
VNEG VNEG VNEG OPB1 ONR1 VPOS OPB0 ONR0 VNEG IPB0 INR0 VPOS IPB1 INR1 VNEG IPB2 INR2 VPOS IPB3 INR3 VNEG IPB4 INR4 VNEG VNEG VNEG
AE
VNEG VNEG VNEG ONB1 OPR1 VPOS ONB0 OPR0 VNEG INB0 IPR0 VPOS INB1 IPR1 VNEG INB2 IPR2 VPOS INB3 IPR3 VNEG INB4 IPR4 VNEG VNEG VNEG
AF
SEROUT
CS CLK SERIN
UPDATE
WE CMENC D4 D3 D2 D1 D0 VDD DGND VPOS VPOS IPG5 INR5 IPR5
SER/PAR
A3 A2 A1 A0 VDD DGND VPOS VPOS ING13 IPB13 INB13
VOCM_
CMENCON
VOCM_
CMENCOFF
2625242322212019181716151413121110987654321
Figure 5. Package Bottom View
A
B
C
D
E
F
G
H
J
K
L
M
N
P
R
T
U
V
W
Y
AA
AB
AC
AD
AE
AF
06596-005
Rev. 0 | Page 8 of 40
AD8176
1 2 3 4 5 6 7 8 9 101112131415161718192021222324 25 26
A
VNEG VNEG VNEG INB12 IPR12 VPOS INB11 IPR11 VNEG INB10 IPR10 VPOS INB9 IPR9 VNEG INB8 IPR8
B
VNEG VNEG VNEG IPB12 INR12 VPOS IPB11 INR11 VNEG IPB10 INR10 VPOS IPB9 INR9 VNEG IPB8 INR8 VPOS OPB8 ONR8 VNEG OPB7 ONR7 VNEG VNEG VNEG
C
VNEG VNEG VNEG ING12 IPG12 VPOS ING11 IPG11 VNEG ING10 IPG10 VPOS ING9 IPG9 VNEG ING8 IPG8 VPOS ONG8 OPG8 VNEG ONG7 OPG7 VNEG VNEG VNEG
D
IPR13 INR13 IPG13 VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS V8 H8 VPOS V7 H7 VNEG VNEG VNEG
E
INB13 IPB13 ING13 VPOS VPOS DGND VDD A0 A1 A2 A3
F
VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS
G
VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS V6 ONG6 OPB6 ONB6
H
IPR14 INR14 IPG14 VPOS VPOS VPOS VPOS VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VPOS VPOS H6 OPG6
J
INB14 IPB14 ING14 VPOS VPOS VPOS VPOS VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VPOS VPOS VPOS VNEG VNEG VNEG
K
VNEG VNEG VNEG VPOS VPOS VPOS VPOS VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VPOS VPOS V5 ONG5 OPB5 ONB5
L
IPR15 INR15 IPG15 VPOS VPOS VPOS VPOS VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VPOS VPOS H5 OPG5 ONR5 OPR5
M
INB15 IPB15 ING15 VPOS VPOS VPOS VPOS VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VPOS VPOS VPOS VPOS VPOS VPOS
N
VPOS VPOS VPOS VPOS
P
VPOS VPOS VPOS VPOS VBLK VPOS VPOS VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VPOS VPOS H4 OPG4 ONR4 OPR4
R
IPR7 INR7 IPG7 VPOS
T
INB7 IPB7 ING7 VPOS VPOS VPOS VPOS VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VPOS VPOS V3 ONG3 OPB3 ONB3
U
VNEG VNEG VNEG VPOS VPOS VPOS VPOS VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VPOS VPOS H3 OPG3 ONR3 OPR3
V
IPR6 INR6 IPG6 VPOS VPOS VPOS VPOS VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VPOS VPOS VPOS VPOS VPOS VPOS
W
INB6 IPB6 ING6 VPOS VPOS VPOS VPOS VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VPOS VPOS V2 ONG2 OPB2 ONB2
Y
VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS H2 OPG2 ONR2 OPR2
AA
VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VNEG VNEG VNEG
AB
IPR5 INR5 IPG5 VPOS VPOS DGND VDD D0 D1 D2 D3 D4 CMENC WE
AC
INB5 IPB5 ING5 VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS VPOS H0 V0 VPOS H1 V1 VNEG VNEG VNEG
AD
VNEG V NEG V NEG IPG4 ING4 V NEG IPG3 IN G3 VPOS IP G2 ING2 VNE G IPG1 ING1 VPOS IP G0 ING0 V NEG OPG0 ONG0 VPOS OPG1 ONG1 VN EG VNE G VNE G
AE
VNEG VNEG VNEG INR4 IPB4 VNEG INR3 IPB3 VPOS INR2 IPB2 VNEG INR1 IPB1 VPOS INR0 IPB0 VNEG ONR0 OPB0 VPOS ONR1 OPB1 VNEG VNEG VNEG
AF
VNEG VNEG VNEG IPR4 INB4 VNEG IPR3 INB3 VPOS IPR2 INB2 VNEG IPR1 INB1 VPOS IPR0 INB0 VNEG OPR0 ONB0 VPOS OPR1 ONB1 VNEG VNEG VNEG
VOCM_
VPOS VPOS VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VPOS VPOS V4 ONG4 OPB4 ONB4
CMENCON
VOCM _
VPOS VPOS VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VNEG VPOS VPOS VPOS VNEG VNEG VNEG
CMENCOFF
SER/PAR
SERIN CLK CS
UPDATE
SEROUT
RST VDD DGND VPOS VPOS VPOS VPOS VPOS VNEG VNEG VNEG
1 2 3 4 5 6 7 8 9 101112131415161718192021222324 25 26
Figure 6. Package Top View
VPOS ONB8 OPR8 VNEG ONB7 OPR7 VNEG VNEG VNEG
VDD DGND VPOS VPOS VPOS VPOS VPOS VNEG VNEG VNEG
ONR6 OPR6
A
B
C
D
E
F
G
H
J
K
L
M
N
P
R
T
U
V
W
Y
AA
AB
AC
AD
AE
AF
6596-006
Rev. 0 | Page 9 of 40
AD8176
Table 14. Ball Grid Description
Ball No. Mnemonic Description
A1 VNEG Negative Analog Power Supply.
A2 VNEG Negative Analog Power Supply.
A3 VNEG Negative Analog Power Supply.
A4 INB12 Input Number 12, Negative Phase.
A5 IPR12 Input Number 12, Positive Phase.
A6 VPOS Positive Analog Power Supply.
A7 INB11 Input Number 11, Negative Phase.
A8 IPR11 Input Number 11, Positive Phase.
A9 VNEG Negative Analog Power Supply.
A10 INB10 Input Number 10, Negative Phase.
A11 IPR10 Input Number 10, Positive Phase.
A12 VPOS Positive Analog Power Supply.
A13 INB9 Input Number 9, Negative Phase.
A14 IPR9 Input Number 9, Positive Phase.
A15 VNEG Negative Analog Power Supply.
A16 INB8 Input Number 8, Negative Phase.
A17 IPR8 Input Number 8, Positive Phase.
A18 VPOS Positive Analog Power Supply.
A19 ONB8 Output Number 8, Negative Phase.
A20 OPR8 Output Number 8, Positive Phase.
A21 VNEG Negative Analog Power Supply.
A22 ONB7 Output Number 7, Negative Phase.
A23 OPR7 Output Number 7, Positive Phase.
A24 VNEG Negative Analog Power Supply.
A25 VNEG Negative Analog Power Supply.
A26 VNEG Negative Analog Power Supply.
B1 VNEG Negative Analog Power Supply.
B2 VNEG Negative Analog Power Supply.
B3 VNEG Negative Analog Power Supply.
B4 IPB12 Input Number 12, Positive Phase.
B5 INR12 Input Number 12, Negative Phase.
B6 VPOS Positive Analog Power Supply.
B7 IPB11 Input Number 11, Positive Phase.
B8 INR11 Input Number 11, Negative Phase.
B9 VNEG Negative Analog Power Supply.
B10 IPB10 Input Number 10, Positive Phase.
B11 INR10 Input Number 10, Negative Phase.
B12 VPOS Positive Analog Power Supply.
B13 IPB9 Input Number 9, Positive Phase.
B14 INR9 Input Number 9, Negative Phase.
B15 VNEG Negative Analog Power Supply.
B16 IPB8 Input Number 8, Positive Phase.
B17 INR8 Input Number 8, Negative Phase.
B18 VPOS Positive Analog Power Supply.
B19 OPB8 Output Number 8, Positive Phase.
B20 ONR8 Output Number 8, Negative Phase.
B21 VNEG Negative Analog Power Supply.
B22 OPB7 Output Number 7, Positive Phase.
B23 ONR7 Output Number 7, Negative Phase.
B24 VNEG Negative Analog Power Supply.
B25 VNEG Negative Analog Power Supply.
Ball No. Mnemonic Description
B26 VNEG Negative Analog Power Supply.
C1 VNEG Negative Analog Power Supply.
C2 VNEG Negative Analog Power Supply.
C3 VNEG Negative Analog Power Supply.
C4 ING12 Input Number 12, Negative Phase.
C5 IPG12 Input Number 12, Positive Phase.
C6 VPOS Positive Analog Power Supply.
C7 ING11 Input Number 11, Negative Phase.
C8 IPG11 Input Number 11, Positive Phase.
C9 VNEG Negative Analog Power Supply.
C10 ING10 Input Number 10, Negative Phase.
C11 IPG10 Input Number 10, Positive Phase.
C12 VPOS Positive Analog Power Supply.
C13 ING9 Input Number 9, Negative Phase.
C14 IPG9 Input Number 9, Positive Phase.
C15 VNEG Negative Analog Power Supply.
C16 ING8 Input Number 8, Negative Phase.
C17 IPG8 Input Number 8, Positive Phase.
C18 VPOS Positive Analog Power Supply.
C19 ONG8 Output Number 8, Negative Phase.
C20 OPG8 Output Number 8, Positive Phase.
C21 VNEG Negative Analog Power Supply.
C22 ONG7 Output Number 7, Negative Phase.
C23 OPG7 Output Number 7, Positive Phase.
C24 VNEG Negative Analog Power Supply.
C25 VNEG Negative Analog Power Supply.
C26 VNEG Negative Analog Power Supply.
D1 IPR13 Input Number 13, Positive Phase.
D2 INR13 Input Number 13, Negative Phase.
D3 IPG13 Input Number 13, Positive Phase.
D4 VPOS Positive Analog Power Supply.
D5 VPOS Positive Analog Power Supply.
D6 VPOS Positive Analog Power Supply.
D7 VPOS Positive Analog Power Supply.
D8 VPOS Positive Analog Power Supply.
D9 VPOS Positive Analog Power Supply.
D10 VPOS Positive Analog Power Supply.
D11 VPOS Positive Analog Power Supply.
D12 VPOS Positive Analog Power Supply.
D13 VPOS Positive Analog Power Supply.
D14 VPOS Positive Analog Power Supply.
D15 VPOS Positive Analog Power Supply.
D16 VPOS Positive Analog Power Supply.
D17 VPOS Positive Analog Power Supply.
D18 VPOS Positive Analog Power Supply.
D19 V8 Output Number 8, V Sync.
D20 H8 Output Number 8, H Sync.
D21 VPOS Positive Analog Power Supply.
D22 V7 Output Number 7, V Sync.
D23 H7 Output Number 7, H Sync.
D24 VNEG Negative Analog Power Supply.
Rev. 0 | Page 10 of 40
AD8176
Ball No. Mnemonic Description
D25 VNEG Negative Analog Power Supply.
D26 VNEG Negative Analog Power Supply.
E1 INB13 Input Number 13, Negative Phase.
E2 IPB13 Input Number 13, Positive Phase.
E3 ING13 Input Number 13, Negative Phase.
E4 VPOS Positive Analog Power Supply.
E5 VPOS Positive Analog Power Supply.
E6 DGND Digital Power Supply.
E7 VDD Digital Power Supply.
E8 A0 Control Pin 0, Output Address Bit 0.
E9 A1 Control Pin 1, Output Address Bit 1.
E10 A2 Control Pin 2, Output Address Bit 2.
E11 A3 Control Pin 3, Output Address Bit 3.
E12
E13 SERIN Control Pin: Serial Data In.
E14
E15
E16 SEROUT Control Pin: Serial Data Out.
E17 VDD Digital Power Supply.
E18 DGND Digital Power Supply.
E19 VPOS Positive Analog Power Supply.
E20 VPOS Positive Analog Power Supply.
E21 VPOS Positive Analog Power Supply.
E22 VPOS Positive Analog Power Supply.
E23 VPOS Positive Analog Power Supply.
E24 VNEG Negative Analog Power Supply.
E25 VNEG Negative Analog Power Supply.
E26 VNEG Negative Analog Power Supply.
F1 VPOS Positive Analog Power Supply.
F2 VPOS Positive Analog Power Supply.
F3 VPOS Positive Analog Power Supply.
F4 VPOS Positive Analog Power Supply.
F5 VPOS Positive Analog Power Supply.
F6 VPOS Positive Analog Power Supply.
F7 VPOS Positive Analog Power Supply.
F8 VPOS Positive Analog Power Supply.
F9 VPOS Positive Analog Power Supply.
F10 VPOS Positive Analog Power Supply.
F11 VPOS Positive Analog Power Supply.
F12 VPOS Positive Analog Power Supply.
F13 VPOS Positive Analog Power Supply.
F14 VPOS Positive Analog Power Supply.
F15 VPOS Positive Analog Power Supply.
F16 VPOS Positive Analog Power Supply.
F17 VPOS Positive Analog Power Supply.
F18 VPOS Positive Analog Power Supply.
F19 VPOS Positive Analog Power Supply.
F20 VPOS Positive Analog Power Supply.
F21 VPOS Positive Analog Power Supply.
F22 VPOS Positive Analog Power Supply.
F23 VPOS Positive Analog Power Supply.
F24 VPOS Positive Analog Power Supply.
SER/PAR
CLK
CS
Control Pin: Serial Parallel Select Mode.
Control Pin: Serial Data Clock.
Control Pin: Chip Select.
Ball No. Mnemonic Description
F25 VPOS Positive Analog Power Supply.
F26 VPOS Positive Analog Power Supply.
G1 VPOS Positive Analog Power Supply.
G2 VPOS Positive Analog Power Supply.
G3 VPOS Positive Analog Power Supply.
G4 VPOS Positive Analog Power Supply.
G5 VPOS Positive Analog Power Supply.
G6 VPOS Positive Analog Power Supply.
G7 VPOS Positive Analog Power Supply.
G8 VPOS Positive Analog Power Supply.
G9 VPOS Positive Analog Power Supply.
G10 VPOS Positive Analog Power Supply.
G11 VPOS Positive Analog Power Supply.
G12 VPOS Positive Analog Power Supply.
G13 VPOS Positive Analog Power Supply.
G14 VPOS Positive Analog Power Supply.
G15 VPOS Positive Analog Power Supply.
G16 VPOS Positive Analog Power Supply.
G17 VPOS Positive Analog Power Supply.
G18 VPOS Positive Analog Power Supply.
G19 VPOS Positive Analog Power Supply.
G20 VPOS Positive Analog Power Supply.
G21 VPOS Positive Analog Power Supply.
G22 VPOS Positive Analog Power Supply.
G23 V6 Output Number 6, V Sync.
G24 ONG6 Output Number 6, Negative Phase.
G25 OPB6 Output Number 6, Positive Phase.
G26 ONB6 Output Number 6, Negative Phase.
H1 IPR14 Input Number 14, Positive Phase.
H2 INR14 Input Number 14, Negative Phase.
H3 IPG14 Input Number 14, Positive Phase.
H4 VPOS Positive Analog Power Supply.
H5 VPOS Positive Analog Power Supply.
H6 VPOS Positive Analog Power Supply.
H7 VPOS Positive Analog Power Supply.
H8 VNEG Negative Analog Power Supply.
H9 VNEG Negative Analog Power Supply.
H10 VNEG Negative Analog Power Supply.
H11 VNEG Negative Analog Power Supply.
H12 VNEG Negative Analog Power Supply.
H13 VNEG Negative Analog Power Supply.
H14 VNEG Negative Analog Power Supply.
H15 VNEG Negative Analog Power Supply.
H16 VNEG Negative Analog Power Supply.
H17 VNEG Negative Analog Power Supply.
H18 VNEG Negative Analog Power Supply.
H19 VNEG Negative Analog Power Supply.
H20 VNEG Negative Analog Power Supply.
H21 VPOS Positive Analog Power Supply.
H22 VPOS Positive Analog Power Supply.
H23 H6 Output Number 6, H Sync.
H24 OPG6 Output Number 6, Positive Phase.
Rev. 0 | Page 11 of 40
AD8176
Ball No. Mnemonic Description
H25 ONR6 Output Number 6, Negative Phase.
H26 OPR6 Output Number 6, Positive Phase.
J1 INB14 Input Number 14, Negative Phase.
J2 IPB14 Input Number 14, Positive Phase.
J3 ING14 Input Number 14, Negative Phase.
J4 VPOS Positive Analog Power Supply.
J5 VPOS Positive Analog Power Supply.
J6 VPOS Positive Analog Power Supply.
J7 VPOS Positive Analog Power Supply.
J8 VNEG Negative Analog Power Supply.
J9 VNEG Negative Analog Power Supply.
J10 VNEG Negative Analog Power Supply.
J11 VNEG Negative Analog Power Supply.
J12 VNEG Negative Analog Power Supply.
J13 VNEG Negative Analog Power Supply.
J14 VNEG Negative Analog Power Supply.
J15 VNEG Negative Analog Power Supply.
J16 VNEG Negative Analog Power Supply.
J17 VNEG Negative Analog Power Supply.
J18 VNEG Negative Analog Power Supply.
J19 VNEG Negative Analog Power Supply.
J20 VNEG Negative Analog Power Supply.
J21 VPOS Positive Analog Power Supply.
J22 VPOS Positive Analog Power Supply.
J23 VPOS Positive Analog Power Supply.
J24 VNEG Negative Analog Power Supply.
J25 VNEG Negative Analog Power Supply.
J26 VNEG Negative Analog Power Supply.
K1 VNEG Negative Analog Power Supply.
K2 VNEG Negative Analog Power Supply.
K3 VNEG Negative Analog Power Supply.
K4 VPOS Positive Analog Power Supply.
K5 VPOS Positive Analog Power Supply.
K6 VPOS Positive Analog Power Supply.
K7 VPOS Positive Analog Power Supply.
K8 VNEG Negative Analog Power Supply.
K9 VNEG Negative Analog Power Supply.
K10 VNEG Negative Analog Power Supply.
K11 VNEG Negative Analog Power Supply.
K12 VNEG Negative Analog Power Supply.
K13 VNEG Negative Analog Power Supply.
K14 VNEG Negative Analog Power Supply.
K15 VNEG Negative Analog Power Supply.
K16 VNEG Negative Analog Power Supply.
K17 VNEG Negative Analog Power Supply.
K18 VNEG Negative Analog Power Supply.
K19 VNEG Negative Analog Power Supply.
K20 VNEG Negative Analog Power Supply.
K21 VPOS Positive Analog Power Supply.
K22 VPOS Positive Analog Power Supply.
K23 V5 Output Number 5, V Sync.
K24 ONG5 Output Number 5, Negative Phase.
Ball No. Mnemonic Description
K25 OPB5 Output Number 5, Positive Phase.
K26 ONB5 Output Number 5, Negative Phase.
L1 IPR15 Input Number 15, Positive Phase.
L2 INR15 Input Number 15, Negative Phase.
L3 IPG15 Input Number 15, Positive Phase.
L4 VPOS Positive Analog Power Supply.
L5 VPOS Positive Analog Power Supply.
L6 VPOS Positive Analog Power Supply.
L7 VPOS Positive Analog Power Supply.
L8 VNEG Negative Analog Power Supply.
L9 VNEG Negative Analog Power Supply.
L10 VNEG Negative Analog Power Supply.
L11 VNEG Negative Analog Power Supply.
L12 VNEG Negative Analog Power Supply.
L13 VNEG Negative Analog Power Supply.
L14 VNEG Negative Analog Power Supply.
L15 VNEG Negative Analog Power Supply.
L16 VNEG Negative Analog Power Supply.
L17 VNEG Negative Analog Power Supply.
L18 VNEG Negative Analog Power Supply.
L19 VNEG Negative Analog Power Supply.
L20 VNEG Negative Analog Power Supply.
L21 VPOS Positive Analog Power Supply.
L22 VPOS Positive Analog Power Supply.
L23 H5 Output Number 5, H Sync.
L24 OPG5 Output Number 5, Positive Phase.
L25 ONR5 Output Number 5, Negative Phase.
L26 OPR5 Output Number 5, Positive Phase.
M1 INB15 Input Number 15, Negative Phase.
M2 IPB15 Input Number 15, Positive Phase.
M3 ING15 Input Number 15, Negative Phase.
M4 VPOS Positive Analog Power Supply.
M5 VPOS Positive Analog Power Supply.
M6 VPOS Positive Analog Power Supply.
M7 VPOS Positive Analog Power Supply.
M8 VNEG Negative Analog Power Supply.
M9 VNEG Negative Analog Power Supply.
M10 VNEG Negative Analog Power Supply.
M11 VNEG Negative Analog Power Supply.
M12 VNEG Negative Analog Power Supply.
M13 VNEG Negative Analog Power Supply.
M14 VNEG Negative Analog Power Supply.
M15 VNEG Negative Analog Power Supply.
M16 VNEG Negative Analog Power Supply.
M17 VNEG Negative Analog Power Supply.
M18 VNEG Negative Analog Power Supply.
M19 VNEG Negative Analog Power Supply.
M20 VNEG Negative Analog Power Supply.
M21 VPOS Positive Analog Power Supply.
M22 VPOS Positive Analog Power Supply.
M23 VPOS Positive Analog Power Supply.
M24 VPOS Positive Analog Power Supply.
Rev. 0 | Page 12 of 40

AD8176
Ball No. Mnemonic Description
M25 VPOS Positive Analog Power Supply.
M26 VPOS Positive Analog Power Supply.
N1 VPOS Positive Analog Power Supply.
N2 VPOS Positive Analog Power Supply.
N3 VPOS Positive Analog Power Supply.
N4 VPOS Positive Analog Power Supply.
N5
N6 VPOS Positive Analog Power Supply.
N7 VPOS Positive Analog Power Supply.
N8 VNEG Negative Analog Power Supply.
N9 VNEG Negative Analog Power Supply.
N10 VNEG Negative Analog Power Supply.
N11 VNEG Negative Analog Power Supply.
N12 VNEG Negative Analog Power Supply.
N13 VNEG Negative Analog Power Supply.
N14 VNEG Negative Analog Power Supply.
N15 VNEG Negative Analog Power Supply.
N16 VNEG Negative Analog Power Supply.
N17 VNEG Negative Analog Power Supply.
N18 VNEG Negative Analog Power Supply.
N19 VNEG Negative Analog Power Supply.
N20 VNEG Negative Analog Power Supply.
N21 VPOS Positive Analog Power Supply.
N22 VPOS Positive Analog Power Supply.
N23 V4 Output Number 4, V Sync.
N24 ONG4 Output Number 4, Negative Phase.
N25 OPB4 Output Number 4, Positive Phase.
N26 ONB4 Output Number 4, Negative Phase.
P1 VPOS Positive Analog Power Supply.
P2 VPOS Positive Analog Power Supply.
P3 VPOS Positive Analog Power Supply.
P4 VPOS Positive Analog Power Supply.
P5 VBLK Output Blank Level.
P6 VPOS Positive Analog Power Supply.
P7 VPOS Positive Analog Power Supply.
P8 VNEG Negative Analog Power Supply.
P9 VNEG Negative Analog Power Supply.
P10 VNEG Negative Analog Power Supply.
P11 VNEG Negative Analog Power Supply.
P12 VNEG Negative Analog Power Supply.
P13 VNEG Negative Analog Power Supply.
P14 VNEG Negative Analog Power Supply.
P15 VNEG Negative Analog Power Supply.
P16 VNEG Negative Analog Power Supply.
P17 VNEG Negative Analog Power Supply.
P18 VNEG Negative Analog Power Supply.
P19 VNEG Negative Analog Power Supply.
P20 VNEG Negative Analog Power Supply.
P21 VPOS Positive Analog Power Supply.
P22 VPOS Positive Analog Power Supply.
P23 H4 Output Number 4, H Sync.
P24 OPG4 Output Number 4, Positive Phase.
VOCM_
CMENCON
Output CM Reference with CM
Encoding On.
Ball No. Mnemonic Description
P25 ONR4 Output Number 4, Negative Phase.
P26 OPR4 Output Number 4, Positive Phase.
R1 IPR7 Input Number 7, Positive Phase.
R2 INR7 Input Number 7, Negative Phase.
R3 IPG7 Input Number 7, Positive Phase.
R4 VPOS Positive Analog Power Supply.
R5
R6 VPOS Positive Analog Power Supply.
R7 VPOS Positive Analog Power Supply.
R8 VNEG Negative Analog Power Supply.
R9 VNEG Negative Analog Power Supply.
R10 VNEG Negative Analog Power Supply.
R11 VNEG Negative Analog Power Supply.
R12 VNEG Negative Analog Power Supply.
R13 VNEG Negative Analog Power Supply.
R14 VNEG Negative Analog Power Supply.
R15 VNEG Negative Analog Power Supply.
R16 VNEG Negative Analog Power Supply.
R17 VNEG Negative Analog Power Supply.
R18 VNEG Negative Analog Power Supply.
R19 VNEG Negative Analog Power Supply.
R20 VNEG Negative Analog Power Supply.
R21 VPOS Positive Analog Power Supply.
R22 VPOS Positive Analog Power Supply.
R23 VPOS Positive Analog Power Supply.
R24 VNEG Negative Analog Power Supply.
R25 VNEG Negative Analog Power Supply.
R26 VNEG Negative Analog Power Supply.
T1 INB7 Input Number 7, Negative Phase.
T2 IPB7 Input Number 7, Positive Phase.
T3 ING7 Input Number 7, Negative Phase.
T4 VPOS Positive Analog Power Supply.
T5 VPOS Positive Analog Power Supply.
T6 VPOS Positive Analog Power Supply.
T7 VPOS Positive Analog Power Supply.
T8 VNEG Negative Analog Power Supply.
T9 VNEG Negative Analog Power Supply.
T10 VNEG Negative Analog Power Supply.
T11 VNEG Negative Analog Power Supply.
T12 VNEG Negative Analog Power Supply.
T13 VNEG Negative Analog Power Supply.
T14 VNEG Negative Analog Power Supply.
T15 VNEG Negative Analog Power Supply.
T16 VNEG Negative Analog Power Supply.
T17 VNEG Negative Analog Power Supply.
T18 VNEG Negative Analog Power Supply.
T19 VNEG Negative Analog Power Supply.
T20 VNEG Negative Analog Power Supply.
T21 VPOS Positive Analog Power Supply.
T22 VPOS Positive Analog Power Supply.
T23 V3 Output Number 3, V Sync.
T24 ONG3 Output Number 3, Negative Phase.
VOCM_
CMENCOFF
Output Reference with CM
Encoding Off.
Rev. 0 | Page 13 of 40

AD8176
Ball No. Mnemonic Description
T25 OPB3 Output Number 3, Positive Phase.
T26 ONB3 Output Number 3, Negative Phase.
U1 VNEG Negative Analog Power Supply.
U2 VNEG Negative Analog Power Supply.
U3 VNEG Negative Analog Power Supply.
U4 VPOS Positive Analog Power Supply.
U5 VPOS Positive Analog Power Supply.
U6 VPOS Positive Analog Power Supply.
U7 VPOS Positive Analog Power Supply.
U8 VNEG Negative Analog Power Supply.
U9 VNEG Negative Analog Power Supply.
U10 VNEG Negative Analog Power Supply.
U11 VNEG Negative Analog Power Supply.
U12 VNEG Negative Analog Power Supply.
U13 VNEG Negative Analog Power Supply.
U14 VNEG Negative Analog Power Supply.
U15 VNEG Negative Analog Power Supply.
U16 VNEG Negative Analog Power Supply.
U17 VNEG Negative Analog Power Supply.
U18 VNEG Negative Analog Power Supply.
U19 VNEG Negative Analog Power Supply.
U20 VNEG Negative Analog Power Supply.
U21 VPOS Positive Analog Power Supply.
U22 VPOS Positive Analog Power Supply.
U23 H3 Output Number 3, H Sync.
U24 OPG3 Output Number 3, Positive Phase.
U25 ONR3 Output Number 3, Negative Phase.
U26 OPR3 Output Number 3, Positive Phase.
V1 IPR6 Input Number 6, Positive Phase.
V2 INR6 Input Number 6, Negative Phase.
V3 IPG6 Input Number 6, Positive Phase.
V4 VPOS Positive Analog Power Supply.
V5 VPOS Positive Analog Power Supply.
V6 VPOS Positive Analog Power Supply.
V7 VPOS Positive Analog Power Supply.
V8 VNEG Negative Analog Power Supply.
V9 VNEG Negative Analog Power Supply.
V10 VNEG Negative Analog Power Supply.
V11 VNEG Negative Analog Power Supply.
V12 VNEG Negative Analog Power Supply.
V13 VNEG Negative Analog Power Supply.
V14 VNEG Negative Analog Power Supply.
V15 VNEG Negative Analog Power Supply.
V16 VNEG Negative Analog Power Supply.
V17 VNEG Negative Analog Power Supply.
V18 VNEG Negative Analog Power Supply.
V19 VNEG Negative Analog Power Supply.
V20 VNEG Negative Analog Power Supply.
V21 VPOS Positive Analog Power Supply.
V22 VPOS Positive Analog Power Supply.
V23 VPOS Positive Analog Power Supply.
V24 VPOS Positive Analog Power Supply.
Ball No. Mnemonic Description
V25 VPOS Positive Analog Power Supply.
V26 VPOS Positive Analog Power Supply.
W1 INB6 Input Number 6, Negative Phase.
W2 IPB6 Input Number 6, Positive Phase.
W3 ING6 Input Number 6, Negative Phase.
W4 VPOS Positive Analog Power Supply.
W5 VPOS Positive Analog Power Supply.
W6 VPOS Positive Analog Power Supply.
W7 VPOS Positive Analog Power Supply.
W8 VNEG Negative Analog Power Supply.
W9 VNEG Negative Analog Power Supply.
W10 VNEG Negative Analog Power Supply.
W11 VNEG Negative Analog Power Supply.
W12 VNEG Negative Analog Power Supply.
W13 VNEG Negative Analog Power Supply.
W14 VNEG Negative Analog Power Supply.
W15 VNEG Negative Analog Power Supply.
W16 VNEG Negative Analog Power Supply.
W17 VNEG Negative Analog Power Supply.
W18 VNEG Negative Analog Power Supply.
W19 VNEG Negative Analog Power Supply.
W20 VNEG Negative Analog Power Supply.
W21 VPOS Positive Analog Power Supply.
W22 VPOS Positive Analog Power Supply.
W23 V2 Output Number 2, V Sync.
W24 ONG2 Output Number 2, Negative Phase.
W25 OPB2 Output Number 2, Positive Phase.
W26 ONB2 Output Number 2, Negative Phase.
Y1 VPOS Positive Analog Power Supply.
Y2 VPOS Positive Analog Power Supply.
Y3 VPOS Positive Analog Power Supply.
Y4 VPOS Positive Analog Power Supply.
Y5 VPOS Positive Analog Power Supply.
Y6 VPOS Positive Analog Power Supply.
Y7 VPOS Positive Analog Power Supply.
Y8 VPOS Positive Analog Power Supply.
Y9 VPOS Positive Analog Power Supply.
Y10 VPOS Positive Analog Power Supply.
Y11 VPOS Positive Analog Power Supply.
Y12 VPOS Positive Analog Power Supply.
Y13 VPOS Positive Analog Power Supply.
Y14 VPOS Positive Analog Power Supply.
Y15 VPOS Positive Analog Power Supply.
Y16 VPOS Positive Analog Power Supply.
Y17 VPOS Positive Analog Power Supply.
Y18 VPOS Positive Analog Power Supply.
Y19 VPOS Positive Analog Power Supply.
Y20 VPOS Positive Analog Power Supply.
Y21 VPOS Positive Analog Power Supply.
Y22 VPOS Positive Analog Power Supply.
Y23 H2 Output Number 2, H Sync.
Y24 OPG2 Output Number 2, Positive Phase.
Rev. 0 | Page 14 of 40

AD8176
Ball No. Mnemonic Description
Y25 ONR2 Output Number 2, Negative Phase.
Y26 OPR2 Output Number 2, Positive Phase.
AA1 VPOS Positive Analog Power Supply.
AA2 VPOS Positive Analog Power Supply.
AA3 VPOS Positive Analog Power Supply.
AA4 VPOS Positive Analog Power Supply.
AA5 VPOS Positive Analog Power Supply.
AA6 VPOS Positive Analog Power Supply.
AA7 VPOS Positive Analog Power Supply.
AA8 VPOS Positive Analog Power Supply.
AA9 VPOS Positive Analog Power Supply.
AA10 VPOS Positive Analog Power Supply.
AA11 VPOS Positive Analog Power Supply.
AA12 VPOS Positive Analog Power Supply.
AA13 VPOS Positive Analog Power Supply.
AA14 VPOS Positive Analog Power Supply.
AA15 VPOS Positive Analog Power Supply.
AA16 VPOS Positive Analog Power Supply.
AA17 VPOS Positive Analog Power Supply.
AA18 VPOS Positive Analog Power Supply.
AA19 VPOS Positive Analog Power Supply.
AA20 VPOS Positive Analog Power Supply.
AA21 VPOS Positive Analog Power Supply.
AA22 VPOS Positive Analog Power Supply.
AA23 VPOS Positive Analog Power Supply.
AA24 VNEG Negative Analog Power Supply.
AA25 VNEG Negative Analog Power Supply.
AA26 VNEG Negative Analog Power Supply.
AB1 IPR5 Input Number 5, Positive Phase.
AB2 INR5 Input Number 5, Negative Phase.
AB3 IPG5 Input Number 5, Positive Phase.
AB4 VPOS Positive Analog Power Supply.
AB5 VPOS Positive Analog Power Supply.
AB6 DGND Digital Power Supply.
AB7 VDD Digital Power Supply.
AB8 D0 Control Pin, Input Address Bit 0.
AB9 D1 Control Pin, Input Address Bit 1.
AB10 D2 Control Pin, Input Address Bit 2.
AB11 D3 Control Pin, Input Address Bit 3.
AB12 D4 Control Pin, Input Address Bit 4.
AB13 CMENC Control Pin, Pass/Stop CM Encoding.
AB14
AB15
AB16
AB17 VDD Digital Power Supply.
AB18 DGND Digital Power Supply.
AB19 VPOS Positive Analog Power Supply.
AB20 VPOS Positive Analog Power Supply.
AB21 VPOS Positive Analog Power Supply.
AB22 VPOS Positive Analog Power Supply.
AB23 VPOS Positive Analog Power Supply.
AB24 VNEG Negative Analog Power Supply.
WE
UPDATE
RST
Control Pin, 1st Rank Write Strobe.
Control Pin, 2nd Rank Write Strobe.
Control Pin, 2nd Rank Data Reset.
Ball No. Mnemonic Description
AB25 VNEG Negative Analog Power Supply.
AB26 VNEG Negative Analog Power Supply.
AC1 INB5 Input Number 5, Negative Phase.
AC2 IPB5 Input Number 5, Positive Phase.
AC3 ING5 Input Number 5, Negative Phase.
AC4 VPOS Positive Analog Power Supply.
AC5 VPOS Positive Analog Power Supply.
AC6 VPOS Positive Analog Power Supply.
AC7 VPOS Positive Analog Power Supply.
AC8 VPOS Positive Analog Power Supply.
AC9 VPOS Positive Analog Power Supply.
AC10 VPOS Positive Analog Power Supply.
AC11 VPOS Positive Analog Power Supply.
AC12 VPOS Positive Analog Power Supply.
AC13 VPOS Positive Analog Power Supply.
AC14 VPOS Positive Analog Power Supply.
AC15 VPOS Positive Analog Power Supply.
AC16 VPOS Positive Analog Power Supply.
AC17 VPOS Positive Analog Power Supply.
AC18 VPOS Positive Analog Power Supply.
AC19 H0 Output Number 0, H Sync.
AC20 V0 Output Number 0, V Sync.
AC21 VPOS Positive Analog Power Supply.
AC22 H1 Output Number 1, H Sync.
AC23 V1 Output Number 1, V Sync.
AC24 VNEG Negative Analog Power Supply.
AC25 VNEG Negative Analog Power Supply.
AC26 VNEG Negative Analog Power Supply.
AD1 VNEG Negative Analog Power Supply.
AD2 VNEG Negative Analog Power Supply.
AD3 VNEG Negative Analog Power Supply.
AD4 IPG4 Input Number 4, Positive Phase.
AD5 ING4 Input Number 4, Negative Phase.
AD6 VNEG Negative Analog Power Supply.
AD7 IPG3 Input Number 3, Positive Phase.
AD8 ING3 Input Number 3, Negative Phase.
AD9 VPOS Positive Analog Power Supply.
AD10 IPG2 Input Number 2, Positive Phase.
AD11 ING2 Input Number 2, Negative Phase.
AD12 VNEG Negative Analog Power Supply.
AD13 IPG1 Input Number 1, Positive Phase.
AD14 ING1 Input Number 1, Negative Phase.
AD15 VPOS Positive Analog Power Supply.
AD16 IPG0 Input Number 0, Positive Phase.
AD17 ING0 Input Number 0, Negative Phase.
AD18 VNEG Negative Analog Power Supply.
AD19 OPG0 Output Number 0, Positive Phase.
AD20 ONG0 Output Number 0, Negative Phase.
AD21 VPOS Positive Analog Power Supply.
AD22 OPG1 Output Number 1, Positive Phase.
AD23 ONG1 Output Number 1, Negative Phase.
AD24 VNEG Negative Analog Power Supply.
Rev. 0 | Page 15 of 40

AD8176
Ball No. Mnemonic Description
AD25 VNEG Negative Analog Power Supply.
AD26 VNEG Negative Analog Power Supply.
AE1 VNEG Negative Analog Power Supply.
AE2 VNEG Negative Analog Power Supply.
AE3 VNEG Negative Analog Power Supply.
AE4 INR4 Input Number 4, Negative Phase.
AE5 IPB4 Input Number 4, Positive Phase.
AE6 VNEG Negative Analog Power Supply.
AE7 INR3 Input Number 3, Negative Phase.
AE8 IPB3 Input Number 3, Positive Phase.
AE9 VPOS Positive Analog Power Supply.
AE10 INR2 Input Number 2, Negative Phase.
AE11 IPB2 Input Number 2, Positive Phase.
AE12 VNEG Negative Analog Power Supply.
AE13 INR1 Input Number 1, Negative Phase.
AE14 IPB1 Input Number 1, Positive Phase.
AE15 VPOS Positive Analog Power Supply.
AE16 INR0 Input Number 0, Negative Phase.
AE17 IPB0 Input Number 0, Positive Phase.
AE18 VNEG Negative Analog Power Supply.
AE19 ONR0 Output Number 0, Negative Phase.
AE20 OPB0 Output Number 0, Positive Phase.
AE21 VPOS Positive Analog Power Supply.
AE22 ONR1 Output Number 1, Negative Phase.
AE23 OPB1 Output Number 1, Positive Phase.
AE24 VNEG Negative Analog Power Supply.
AE25 VNEG Negative Analog Power Supply.
Ball No. Mnemonic Description
AE26 VNEG Negative Analog Power Supply.
AF1 VNEG Negative Analog Power Supply.
AF2 VNEG Negative Analog Power Supply.
AF3 VNEG Negative Analog Power Supply.
AF4 IPR4 Input Number 4, Positive Phase.
AF5 INB4 Input Number 4, Negative Phase.
AF6 VNEG Negative Analog Power Supply.
AF7 IPR3 Input Number 3, Positive Phase.
AF8 INB3 Input Number 3, Negative Phase.
AF9 VPOS Positive Analog Power Supply.
AF10 IPR2 Input Number 2, Positive Phase.
AF11 INB2 Input Number 2, Negative Phase.
AF12 VNEG Negative Analog Power Supply.
AF13 IPR1 Input Number 1, Positive Phase.
AF14 INB1 Input Number 1, Negative Phase.
AF15 VPOS Positive Analog Power Supply.
AF16 IPR0 Input Number 0, Positive Phase.
AF17 INB0 Input Number 0, Negative Phase.
AF18 VNEG Negative Analog Power Supply.
AF19 OPR0 Output Number 0, Positive Phase.
AF20 ONB0 Output Number 0, Negative Phase.
AF21 VPOS Positive Analog Power Supply.
AF22 OPR1 Output Number 1, Positive Phase.
AF23 ONB1 Output Number 1, Negative Phase.
AF24 VNEG Negative Analog Power Supply.
AF25 VNEG Negative Analog Power Supply.
AF26 VNEG Negative Analog Power Supply.
Rev. 0 | Page 16 of 40

AD8176
TRUTH TABLE AND LOGIC DIAGRAM
Table 15. Operation Truth Table
/PAR
WE UPDATE CLK
X X X X X 0 X X X
0 1 1 X X 1 0 0 X
1 1
0 1 1 X X 1 1 0 X
1 0 1 X X 1 X 0 X
1 X X X X 1 1 0 X No change in logic.
SERIN SEROUT
SERIN
SERIN
i
RST
1 0 0 X
i-45
SER
CS
CMENC Operation/Comment
Asynchronous reset. All
outputs are disabled. Contents
of 45-bit shift register are
unchanged.
Broadcast. The data on D0
through D4 is loaded into all
locations of the 45-bit shift
register. Data is not applied to
switch array.
Serial mode. The data on the
SERIN line is loaded into the
45-bit shift register. The first bit
clocked into the shift register
appears at SEROUT 45 clock
cycles later. Data is not applied
to switch array.
Parallel mode. The data on
parallel lines D0 through D4 is
loaded into the shift register
location addressed by A0
through A3. Data is not applied
to switch array.
Switch array update. Data in
the 45-bit shift register is
transferred to the parallel
latches and applied to the
switch array.
Rev. 0 | Page 17 of 40

AD8176
SEROUT
DQ
CLK
Q
S
D1
D0
DQ
CLK
Q
S
D1
D0
DQ
CLK
Q
S
D1
D0
DQ
CLK
Q
S
D1
D0
DQ
CLK
Q
S
D1
D0
CLK
Q
S
D1
D0
CLK
DQ
Q
S
D1
D0
D
ENA
D
ENA
D
ENA
D
ENA
D
ENA
D
ENA
D
ENA
Q
EN
OUT8
CLR
Q
B3
OUT8
CLR
Q
B2
OUT8
CLR
Q
B1
OUT8
CLR
Q
B0
OUT8
CLR
Q
EN
OUT7
CLR
Q
B0
OUT1
CLR
06596-029
9
OUTPUT ENABLE
DECODE
D0D1D2D3D4
D
Q
EN
DQ DQ
CLK
Q
S
D1
D0
DQ
CLK
Q
S
D1
D0
DQ
CLK
Q
S
D1
D0
DQ
CLK
Q
S
D1
D0
DQ
CLK
Q
S
D1
D0
ENA
D
ENA
D
ENA
D
ENA
D
ENA
OUT0
CLR
Q
B3
OUT0
CLR
Q
B2
OUT0
CLR
Q
B1
OUT0
CLR
Q
B0
OUT0
CLR
UPDATE
144
SWITCH MATRIX
CS
RST
OUT0 EN
CS
WE
SER/PAR
PARALLEL DATA
(OUTPUT ENABLE)
CLK
SERIN
OUT1 EN
OUT2 EN
OUT3 EN
OUT4 EN
ADDRESS
OUTPUT
OUT5 EN
4 TO 9 DECODER
A3A2A1
A0
OUT6 EN
OUT7 EN
OUT8 EN
Figure 7. Logic Diagram
Rev. 0 | Page 18 of 40

AD8176
V
n
Ω
n
n
V
V
V
V
V
EQUIVALENT CIRCUITS
POS
OPn, ONn
1kΩ
1kΩ
(VPOS – VNEG)
2
06596-007
Figure 8. Enabled Output (See Also ESD Protection Map,
POS
20kΩ
20kΩ
3.4pF
3.4pF
VNEG
VPOS
20kΩ
20kΩ
VNEG
0.4pF 3.1kΩ
Figure 9. Disabled Output (See Also ESD Protection Map,
2500Ω
10kΩ
2500Ω
5050
5050Ω
IPn
IN
1.3pF
0.3pF
1.3pF
Figure 10. Receiver Differential (See Also ESD Protection Map,
Figure 19)
OPn
ONn
06596-008
Figure 19)
6596-009
Figure 19)
VNEG
10kΩ
6596-012
BLK,
OCM_CMENCOFF
0.1pF
0.1pF 10kΩ
Figure 13. VBLK and VOCM_CMENCOFF Inputs
POS
VNEG
Figure 19)
3.33kΩ
6596-013
(See Also ESD Protection Map,
0.3pF
VOCM_CMENCON
0.3pF 3.33kΩ
Figure 14. VOCM_CMENCON Input (See Also ESD Protection Map,
DD
25kΩ
1kΩ
DGND
06596-014
Figure 15.
RST
RST
Input (See Also ESD Protection Map, Figure 19)
Figure 19)
IP
INn
Figure 11. Receiver Simplified Equivalent Circuit When Driving Differentially
Figure 12. Receiver Simplified Equivalent Circuit When Driving Single-Ended
0.3pF
IP
INn
1.3pF
1.3pF
1.6pF
10kΩ
2.5kΩ
2500Ω
2500Ω
06596-011
CLK, SER/PAR, WE,
UPDATE, SERIN
A[3:0], D[4:0],
6596-010
CMENC
Figure 16. Logic Input (See Also ESD Protection Map,
CS
25kΩ
Figure 17.
CS
Input (See Also ESD Protection Map, Figure 19)
1kΩ
1kΩ
DGND
DGND
06596-030
06596-015
Figure 19)
Rev. 0 | Page 19 of 40

AD8176
V
V
V
DD
SEROUT,
H, V
DGND
06596-016
Figure 18. SEROUT, H, V Logic Outputs
(See Also ESD Protection Map,
Figure 19)
IPn, INn,
OPn, ONn, VBLK,
VOCM_CMENCOF F
VOCM_CMENCON
POS
VNEG DG ND
Figure 19. ESD Protection Map
DD
CLK, RST ,
SER/PAR,
WE,
UPDATE,
SERIN,
SEROUT,
A[3:0],
D[4:0],
CMENC,
CS
06596-017
Rev. 0 | Page 20 of 40

AD8176
TYPICAL PERFORMANCE CHARACTERISTICS
VS = ± 2.5 V at TA = 25°C, G = +2, RL = 100 Ω (each output), VBLK = 0 V, output CM voltage = 0 V, differential I/O mode, unless
otherwise noted.
20
18
16
14
12
10
GAIN (dB)
8
6
4
2
0
1 10 100 1000
FREQUENCY (MHz)
Figure 20. Small Signal Frequency Response, 200 mV p-p
06596-031
0.15
0.10
0.05
0
, DIFF (V)
OUT
V
–0.05
–0.10
–0.15
02468101214161820
TIME (ns)
Figure 23. Small Signal Pulse Response, 200 mV p-p
6596-034
18
16
14
12
10
8
GAIN (dB)
6
4
2
0
–2
1 10 100 1000
FREQUENCY (MHz)
Figure 21. Large Signal Frequency Response, 2 V p-p
22
20
18
16
14
12
10
GAIN (dB)
8
6
4
2
0
1 10 100 1000
FREQUENCY (MHz)
10pF
5pF
2pF
0pF
Figure 22. Small Signal Frequency Response with Capacitive Loads
1.5
1.0
0.5
0
, DIFF (V)
OUT
V
–0.5
–1.0
–1.5
02468101214161820
6596-032
TIME (ns)
06596-035
Figure 24. Large Signal Pulse Response, 2 V p-p
15
V
OUT
10
V
IN
5
0
–5
–10
OUTPUT ERROR ( %)
–15
–20
–25
012345678
6596-033
TIME (ns)
ERROR
1.2
0.9
0.6
0.3
0
–0.3
–0.6
–0.9
–1.2
, DIFF (V)
OUT
V
06596-036
Figure 25. Settling Time
Rev. 0 | Page 21 of 40

AD8176
5
4
3
2
1
0
–1
OUTPUT ERRO R (%)
–2
–3
–4
–5
012345678
TIME (ns)
Figure 26. Settling Time, 1% Zoom
2
1
0
–1
, DIFF (V)
–2
OUT
V
–3
1650V/µs PEAK
6000
5000
4000
3000
2000
1000
6596-037
SLEW RATE (V/µs)
0
–10
–20
–30
–40
–50
–60
CROSSTALK (dB)
–70
–80
–90
–100
1 10 100 1000
FREQUENCY (MHz)
Figure 29. Crosstalk, All Hostile
0
–20
–40
–60
–80
FEEDTHROUG H (dB)
6596-040
–4
–5
012345678910
TIME (ns)
Figure 27. Large Signal Rising Edge Slew Rate
0
–10
–20
–30
–40
–50
CROSSTALK (dB)
–60
–70
–80
1 10 100 1000
FREQUENCY (MHz)
Figure 28. Crosstalk, All Hostile, Single-Ended
0
–1000
–100
–120
1 10 100 1000
06596-038
FREQUENCY (MHz)
06596-041
Figure 30. Crosstalk, Off Isolation
0
–10
–20
–30
–40
CMR (dB)
–50
–60
–70
1 10 100 1000
06596-039
CMENC HIG H
CMENC LOW
FREQUENCY (MHz)
06596-042
Figure 31. Common-Mode Rejection
Rev. 0 | Page 22 of 40

AD8176
600
|I
| AND |I
500
400
| (mA)
NEG
300
| AND |I
200
POS
|I
100
POS
(BROADCAST)
|I
| AND |I
POS
(ALL OUTPUTS DISABLED)
NEG
NEG
|
|
10000
1000
IMPEDANCE (Ω)
0
–50 –40 –30 –20 –10 0 10 20 30 40 50 60 70 80 90 100
TEMPERATURE ( °C)
Figure 32. Quiescent Supply Currents vs. Temperature
3000
2500
2000
1500
IMPEDANCE (Ω)
1000
500
0
1 10 100 1000
FREQUENCY (MHz)
Figure 33. Output Impedance, Disabled
100
90
80
70
60
50
40
IMPEDANCE (Ω)
30
20
10
0
1 10 100 1000
FREQUENCY (MHz)
Figure 34. Output Impedance, Enabled
100
1 10 100 1000
6596-043
FREQUE NCY (MHz )
06596-046
Figure 35. Input Impedance
10000
1000
IMPEDANCE (Ω)
100
1 10 100 1000
06596-044
FREQUENCY (MHz)
06596-047
Figure 36. Input Impedance, Single-Ended
0
–10
–20
–30
–40
–50
BALANCE ERROR (dB)
–60
–70
–80
1 10 100 1000
6596-045
FREQUENCY (MHz)
06596-048
Figure 37. Output Balance Error
Rev. 0 | Page 23 of 40

AD8176
1.0
20
1400
0.5
0
–0.5
, COMMON MODE (V)
OUT
V
–1.0
–1.5
0 100 200 300 400 500 600 700 800 900 1000
BLUE
HSYNC
TIME (ns)
RED
Figure 38. Common-Mode Pulse Response
0
–10
–20
–30
–40
–50
FEEDTHROUG H (dB)
–60
–70
–80
1 10 100 1000
FREQUENCY (MHz)
Figure 39. Common-Mode Isolation, CMENC Low
GREEN
VSYNC
15
10
(V)
OUT
V
5
0
–5
6596-049
06596-050
1200
1000
800
COUNT
600
400
200
0
–70 –60 –50 –40 –30 –20 –10 0 10 20 30 40 50 60 70
VOS (mV)
Figure 41. V
5
4
3
2
1
0
(mV)
OS
V
–1
–2
–3
–4
–5
–40 –20 0 20 40 60 80 100
Figure 42. V
Distribution
OS
58µV/°C
TEMPERATURE (° C)
Drift, RTO
OS
06596-052
06596-053
200
160
120
80
40
NOISE SPECTRAL DENSIT Y (nV/√Hz)
0
0 102030405060708090100
FREQUENCY (MHz)
Figure 40. Noise Spectral Density
6596-051
Rev. 0 | Page 24 of 40
1.5
1.0
0.5
0
–0.5
COMMON MODE (mV)
OS
V
–1.0
–1.5
–40 –20 0 20 40 60 80 100
Figure 43. V
–16µV/° C
TEMPERATURE (° C)
Drift, Common Mode, RTO
OS
06596-054

AD8176
5
4
UPDATE
3
2
UPDATE (V)
1
0
–1
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280
TIME (ns)
Figure 44. Enable Time
1.25
1.00
V
OUT
0.75
0.50
, SINGLE -ENDED (V)
0.25
OUT
V
0
–0.25
06596-055
0.020
0.015
0.010
0.005
0
–0.005
–0.010
NORMALIZ ED DC GAIN (dB)
–0.015
–0.020
–40 –20 0 20 40 60 80 100
TEMPERATURE (° C)
32ppm/°C
06596-056
Figure 45. Normalized DC Gain vs. Temperature
Rev. 0 | Page 25 of 40

AD8176
THEORY OF OPERATION
The AD8176 is a non-blocking crosspoint with 16 RGB input
channels and 9 RGB output channels. Architecturally, the
AD8176 is a differential-in, differential-out crosspoint suited for
middle-of-Cat-5-run applications. Furthermore, its differentialin, differential-out gain of +4 and its decoded H and V sync
outputs make it the ideal solution for driving a monitor directly.
The ability to set the output common mode (CM) and black
level through external pins offers additional flexibility.
Processing of CM voltage levels is achieved by placing the
AD8176 in either of its two operation modes. In the first
operation mode (CMENC low), the input CM of each RGB
differential pair (possibly present either in the form of sync-on
CM signaling or noise) is removed through the switch, and the
output CM is set to a global reference voltage via the VOCM_
CMENCOFF analog input. In this mode, the AD8176 behaves
as a traditional differential-in, differential-out switch. If sync-on
CM signaling is present at the differential RGB inputs, then the
H and V outputs represent decoded syncs. In the second operation mode (CMENC high), input sync-on CM signaling is
propagated through the switch with unity gain. In this mode,
the overall output CM is set to a global reference voltage via the
VOCM_CMENCON analog input. Note that in both operation
modes, the overall input CM is blocked through the switch.
Input pin VBLK defines the black level of the positive output
phase. The combination of VBLK and VOCM_CMENCOFF
allows the user to position the positive and negative output
phases anywhere in the allowable output voltage range, thus
maximizing output headroom usage.
The switch is organized into nine 16:1 RBG multiplexers, with
each being responsible for connecting an RGB input channel to
its respective RGB output channel. Decoding logic selects a
single input (or none) in each multiplexer and connects it to its
respective output. Feedback around each multiplexer realizes a
closed-loop differential-in, differential-out gain of +2 in the core.
Each differential RGB input channel is buffered by a differential
receiver, which is capable of accepting input CM voltages extending all the way to either supply rail. Excess closed-loop receiver
bandwidth reduces the receiver’s effect on the overall device
bandwidth. Feedback around each differential receiver realizes
a gain of +2 yielding an overall differential-in, differential-out
crosspoint gain of +4. A separate loop realizes a closed-loop
common-mode gain of +1.
The output stage is designed for fast slew rate and settling time
while driving a series-terminated Cat-5 cable. Unlike competing
multiplexer designs, the small signal bandwidth closely
approaches the large signal bandwidth.
The outputs of the AD8176 can be disabled to minimize
on-chip power dissipation. When disabled, there is only a
common-mode feedback network of 2.7 k between the
differential outputs. This high impedance allows multiple ICs
to be bussed together without additional buffering. Care must
be taken to reduce output capacitance, which can result in
overshoot and frequency-domain peaking. A series of internal
amplifiers drive internal nodes such that wideband high impedance is presented at the disabled output, even while the output
bus experiences fast signal swings. When the outputs are disabled
and driven externally, the voltage applied to them should not
exceed the valid output swing range for the AD8176 in order to
keep these internal amplifiers in their linear range of operation.
Applying excessive differential voltages to the disabled outputs
can cause damage to the AD8176 and should be avoided (see the
Absolute Maximum Ratings section for guidelines).
The connectivity of the AD8176 is controlled by a flexible TTLcompatible logic interface. Either parallel or serial loading into a
first rank of latches preprograms each output. A global update
signal moves the programming data into the second rank of
latches, simultaneously updating all outputs. In serial mode, a
serial-out pin allows devices to be daisy-chained together for a
single-pin programming of multiple ICs. A power-on reset pin
is available to avoid bus conflicts by disabling all outputs. This
power-on reset clears the second rank of latches, but does not
clear the first rank of latches. A broadcast parallel programming
feature is available in parallel mode to quickly clear the first
rank. In serial mode, preprogramming individual inputs is not
possible and the entire shift register needs to be flushed. A
global chip-select pin gates the input clock and the global
update signal to the second rank of buffers.
The AD8176 can operate on a single +5 V supply, powering
both the signal path (with the VPOS/VNEG supply pins) and
the control logic interface (with the VDD/DGND supply pins).
Split supply operation is possible with ±2.5 V supplies in order
to easily interface to ground-referenced video signals. In this
case, a flexible logic interface allows the control logic supplies
(VDD/DGND) to be run off +5 V/0 V to +3.3 V/0 V while the
analog core remains on split supplies. Additional flexibility in
the analog output common-mode level (VOCM_CMENCOFF)
and output black level (VBLK) facilitates operation with
unequally split supplies. If +3 V/−2 V supplies to +2 V/−3 V
supplies are desired, the output CM can still be set to 0 V for
ground-referenced video signals.
Rev. 0 | Page 26 of 40

AD8176
APPLICATIONS
OPERATING MODES
Depending on the state of the CMENC logic input, the
AD8176 can be set in either of two differential-in, differentialout operating modes. In addition, monitors can be driven
directly by tapping the outputs single-ended and making use of
the decoded H and V sync outputs.
Middle-of-Cat-5-Run Application, CM Encoding Turned Off
In this application, the AD8176 is placed somewhere in the
middle of a Cat-5 run. By tying CMENC low, the CM of each
RGB differential pair is removed through the device (or turned
off), while the overall CM at the output is defined by the reference
value VOCM_CMENCOFF. In this mode of operation, CM
noise is removed, while the intended differential RGB signals
are buffered and passed to the outputs. The AD8176 is placed in
this operation mode when used in a sync-on color scheme.
Figure 46 shows the voltage levels and CM handling for a single
input channel connected to a single output channel in a middleof-Cat-5-run application with CM encoding turned off.
DIFF. R
CM
R
CM
G
Figure 46. AD8176 in a Middle-of-Cat-5-Run Application, CM Encoding Off
Inputs VBLK and VOCM_CMENCOFF allow the user
complete flexibility in defining the output CM level and the
amount of overlap between the positive and negative phases,
thus maximizing output headroom usage. Whenever VBLK
differs from VOCM_CMENCOFF by more than ±100 mV, a
differential voltage
the expression
Conversely, whenever the difference between VBLK and
VOCM_CMENCOFF is less than ±100 mV, no differential
voltage is added at the outputs.
Middle-of-Cat-5-Run Application, CM Encoding Turned On
In this application, the AD8176 is also placed somewhere in the
middle of a Cat-5 run, although the common-mode handling is
different. By tying CMENC high, the CM of each RGB input is
passed through the part with a gain of +1, while at the same
time, the overall output CM is stripped and set equal to the
voltage applied at the VOCM_CMENCON pin. The AD8176 is
placed in this operation mode when used with a sync-on CM
scheme. Although asserted, the H and V outputs are not used in
DIFF. B
CM
B
DIFF. R
DIFF. G
CM
CM
G
DIFF. G
INPUT
OVERALL
CM
CMENC
AD8176
CM
R
VOCM_CMENCO FF
(Note that in this application, the H and V outputs,
though asserted, are not used)
is added at the outputs according to
diff
= 2 × (VBLK − VOCM_CMENCOFF).
diff
DIFF. B
B
OUTPUT
OVERALL
CM
this application.
handling for a single input channel connected to a single output
channel in a middle-of-Cat-5-run application with CM
encoding turned on.
DIFF. R
CM
R
CM
G
Figure 47. AD8176 in Middle-of-Cat-5-Run Application, CM Encoding On
In this operation mode, the difference
VOCM_CMENCOFF) still adds an output differential voltage,
as described in the previous section.
End-of-Cat-5-Run Application, CM Encoding Turned Off—Driving a Monitor Directly
In this application, the AD8176 is placed at the end of a CAT-5
run to drive a monitor directly—the differential outputs are
tapped single-ended to drive the monitor’s inputs, CMENC is
tied to logic low to remove sync-on-CM information at the
output of the part, and the decoded H and V sync outputs are
06596-019
tied to the monitor’s sync inputs.
The differential-in, differential-out gain of +4 provides a
differential-in, single-ended out gain of +2 at the output pins of
the AD8176. This yields the correct differential-in, single-ended
out gain of +1 at the input of the monitor.
The relationship between the incoming sync-on CM signaling
and the H and V syncs is defined according to
Table 16. H and V Sync Truth Table (V
CMR CMG CMB H V
0.5 0 0 Low High
0 0.5 −0.5 Low Low
−0.5 0.5 0 High Low
0 −0.5 0.5 High High
The following two statements are equivalent to the truth table
(
Tabl e 16 ) in producing H and V for all allowable CM inputs:
• H sync is high when the CM of Blue is larger than the CM
of Red
• V sync is high when the combined CM of Red and Blue is
larger then the CM of Green.
Figure 47 shows the voltage levels and CM
DIFF. B
CM
B
AD8176
VOCM_CMENCON
DIFF. G
INPUT
OVERALL
CM
CMENC
(Note that in this application, the H and V outputs,
though asserted, are not used)
DIFF. R
CM
R
= 2 × (VBLK −
diff
CM
DIFF. G
CM
G
Tabl e 1 6 .
POS/VNEG
= ±2.5 V)
B
DIFF. B
OUTPUT
OVERALL
CM
06596-022
Rev. 0 | Page 27 of 40

AD8176
V
For a practical example, refer to Figure 48. (Note that the output
pulses have been slightly shifted with respect to each other for
clarity.)
OCM_CMENCOFF = 0.7V
NEGATIVE
PHASE
1.4V
VBLK = 0V
POSITIVE
PHASE
Figure 48. Output at the AD8176 pins for 0 V to 0.7 V Input Differential Pulse,
VBLK = 0 V, VOCM_CMENCOFF = 0.7 V
0V
06596-021
The input to the AD8176 is a differential pulse with a low level
of 0 V and a high level of 0.7 V. VBLK is set to 0 V, while
VOCM_CMENCOFF is set to 0.7 V. With this choice of values,
the positive and negative output phases are overlapped, (with
the positive phase ranging from 0 V to 1.4 V, and the negative
phase ranging from 1.4 V to 0 V, respectively). The supplies are
set to +3 V/−2 V to be in compliance with output headroom
requirements.
The voltage on the positive output phase for a 0 V differential
input is equal to the voltage on VBLK, for all cases when VBLK
and VOCM_CMENCOFF differ by more than ±100 mV.
PROGRAMMING
The AD8176 has two options for changing the programming of
the crosspoint matrix. In the first option, a serial word of 45 bits
can be provided that updates the entire matrix each time. The
second option allows for changing a single output’s programming
via a parallel interface. The serial option requires fewer signals,
but more time (clock cycles) for changing the programming; the
parallel programming technique requires more signals, but
allows for changing a single output at a time, therefore requiring
fewer clock cycles.
Serial Programming Description
The serial programming mode uses the CS,
UPDATE
CLK
the
SER
, and
/PAR device pins. The first step is to enable
on by pulling CS low. Next,
enable the serial programming mode. The parallel clock
should be held high during the entire serial programming
operation.
UPDATE
The
signal should be high during the time that data is
shifted into the device’s serial port. Although the data still shifts
in when
UPDATE
is low, the transparent, asynchronous latches
allow the shifting data to reach the matrix. This causes the
matrix to try to update to every intermediate state as defined by
the shifting data.
The data at SERIN is clocked in at every falling edge of
total of 45 bits must be shifted in to complete the programming.
A total of five bits must be supplied for each of the nine RGB
output channels, an output enable bit (D4) and four bits (D3 to
CLK
, SERIN,
SER
/PAR is pulled low to
WE
CLK
. A
D0) that determine the input channel. If D4 is low (output
disabled), the four associated bits (D3 to D0) do not matter,
because no input is switched to that output.
The most-significant-output-address data is shifted in first, with
the enable bit (D4) shifted in first, followed by the input address
(D3 to D0) entered sequentially with D3 first and D0 last. Each
remaining output is programmed sequentially, until the leastsignificant-output-address data is shifted in. At this point,
UPDATE
can be taken low, which causes the programming of
the device according to the data that was just shifted in. The
UPDATE
latches are asynchronous and when
UPDATE
is low,
they are transparent.
If more than one AD8176 device is to be serially programmed
in a system, the SEROUT signal from one device can be
connected to the SERIN of the next device to form a serial
chain. All of the
CLK, UPDATE
, and
SER
/PAR pins should be
connected in parallel and operated as described previously. The
serial data is input to the SERIN pin of the first device of the
chain, and it ripples through to the last. Therefore, the data for
the last device in the chain should come at the beginning of the
programming sequence. The length of the programming
sequence is 45 bits times the number of devices in the chain.
gates the
high both
CLK
CLK
state, while when
UPDATE
and
UPDATE
and
CS
is held low, both
signals, so that when CS is held
are held in their inactive high
CLK
and
UPDATE
CS
function normally.
Parallel Programming Description
When using the parallel programming mode, it is not necessary
to reprogram the entire device when making changes to the
matrix. In fact, parallel programming allows the modification of
a single output or more at a time. Since this takes only one
WE/UPDATE
cycle, significant time savings can be realized by
using parallel programming.
One important consideration in using parallel programming is
RST
that the
When taken low, the
signal does not reset all registers in the AD8176.
RST
signal only sets each output to the
disabled state. This is helpful during power-up to ensure that
two parallel outputs are not active at the same time.
After initial power-up, the internal registers in the device
generally have random data, even though the
RST
signal has
been asserted. If parallel programming is used to program one
output, then that output will be properly programmed, but the
rest of the device will have a random program state depending
on the internal register content at power-up. Therefore, when
using parallel programming, it is essential that all outputs be
programmed to a desired state after power-up. This ensures that
the programming matrix is always in a known state. From then
on, parallel programming can be used to modify a single output
or more at a time.
Rev. 0 | Page 28 of 40

AD8176
+
In similar fashion, if
UPDATE
is taken low after initial power-up,
the random power-up data in the shift register is programmed
into the matrix. Therefore, to prevent the crosspoint from being
programmed into an unknown state, do not apply a logic level
UPDATE
to
after power is initially applied. Programming the full
shift register once to a desired state, by either serial or parallel
programming after initial power-up, eliminates the possibility
of programming the matrix to an unknown state.
To change an output’s programming via parallel programming,
CS
should be taken low, while
be taken high. The serial programming clock,
left high during parallel programming. The parallel clock,
SER
/PAR and
UPDATE
CLK
, should be
should
WE
,
should start in the high state. The 4-bit address of the output to
be programmed should be put on A3 to A0. Data Bit D3 to Data
Bit D0 should contain the information that identifies the input
that gets programmed to the output that is addressed. Data Bit
D4 determines the enabled state of the output. If D4 is low
(output disabled), then the data on D3 to D0 does not matter.
After the desired address and data signals have been established,
they can be latched into the shift register by a high to low
transition of the
however, until the
WE
signal. The matrix is not programmed,
UPDATE
signal is taken low. It is thus possible
to latch in new data for several or all of the outputs first via
successive negative transitions of
WE
high, and then have all the new data take effect when
while
UPDATE
is held
UPDATE
goes low. This is the technique that should be used when
programming the device for the first time after power-up when
using parallel programming.
Reset
When powering up the AD8176, it is usually desirable to have
RST
the outputs come up in the disabled state. The
pin, when
taken low, causes all outputs to be in the disabled state.
However, the
RST
signal does not reset all registers in the
AD8176. This is important when operating in the parallel
programming mode. Please refer to that section for information
about programming internal registers after power-up. Serial
programming programs the entire matrix each time, so no
special considerations apply.
Because the data in the shift register is random after power-up,
it should not be used to program the matrix, or the matrix can
enter unknown states. To prevent this, do not apply a logic low
signal to
UPDATE
initially after power-up. The shift register
should first be loaded with the desired data, and only then can
UPDATE
the
The
RST
be taken low to program the device.
pin has a 20 k pull-up resistor to VDD that can be
used to create a simple power-up reset circuit. A capacitor from
RST
to ground holds
RST
low for some time while the rest of
the device stabilizes. The low condition causes all the outputs to
be disabled. The capacitor then charges through the pull-up
resistor to the high state, thus allowing full programming
capability of the device.
Broadcast
The AD8176 logic interface has a broadcast mode, in which all
first rank latches can be simultaneously parallel-programmed to
the same data in one write-cycle. This is especially useful in
clearing random first rank data after power-up. To access the
broadcast mode, the part is parallel-programmed using the
A0 to A3, D0 to D4, and
ence is that the
SER
were taking place. By holding
occurs, and instead, the
UPDATE
device pins. The only differ-
/PAR pin is held low, as if serial programming
CLK
high, no serial clocking
WE
can be used to clock all first rank
WE
latches in the chip at once.
DIFFERENTIAL AND SINGLE-ENDED OPERATION
Although the AD8176 has fully differential inputs and outputs,
it can also be operated in a single-ended fashion. Single-ended
and differential configurations are discussed in the following
sections, along with implications on gain, impedances, and
terminations.
Differential Input
Each differential input to the AD8176 is applied to a differential
receiver. These receivers allow the user to drive the inputs with
an uncertain common-mode voltage, such as from a remote
source over twisted pair. The receivers respond only to the
differences in input voltages and restore an internal common
mode suitable for the internal signal path. Noise or crosstalk,
which affect each receiver’s inputs equally, are rejected by the
input stage, as specified by its common-mode rejection ratio
(CMRR).
Furthermore, the overall common-mode voltage of all three
differential pairs comprising an RGB channel is processed and
rejected by a separate circuit block. For example, a static discharge
or a resistive voltage drop in a middle-of-Cat-5-run application
with sync-on CM signaling coupling into all three pairs in an
RGB channel are rejected at the output of the AD8176, while
the sync-on CM signals are allowed through the switch.
The circuit configuration used by the differential input receivers
is similar to that of several Analog Devices, Inc. general-purpose
differential amplifiers, such as the . The topology is that
of a voltage-feedback amplifier with internal gain resistors. The
input differential impedance for each receiver is 5 k in parallel
with 10 k or 3.33 k, as shown in
R
IN
IN–
G
R
CM
R
G
Figure 49. Input Receiver Equivalent Circuit
R
RCVR
F
R
F
AD8131
Figure 49.
TO SWITCH MATRIX
OUT–
OUT+
06596-023
,
Rev. 0 | Page 29 of 40

AD8176
This impedance creates a small differential termination error if
the user does not account for the 3.33 k parallel element.
However, this error is less than 1% in most cases. Additionally,
the source impedance driving the AD8176 appears in parallel
with the internal gain-setting resistors, such that there may be a
gain error for some values of source resistance. The AD8176 is
adjusted such that its gain is correct when driven by a backterminated Cat-5 cable (25 effective impedance to ground at
each input pin, or 100 differential source impedance across
pairs of input pins). If a different source impedance is presented,
the differential gain of the AD8176 input receiver can be
calculated as
k05.5
RG+=k5.2
S
where R
DM
is the effective impedance to ground at each input pin.
S
When operating with a differential input, care must be taken to
keep the common-mode, or average, of the input voltages
within the linear operating range of the AD8176 receiver. For
the AD8176 receiver, this common-mode range can extend railto-rail, provided the differential signal swing is small enough to
avoid forward biasing the ESD diodes (it is safest to keep the
common-mode plus differential signal excursions within the
supply voltages of the part).
The input voltage of the AD8176 is linear for ±0.5 V of differential input voltage difference (this limitation is primarily due
to the ability of the output to swing close to the rails, because
the differential gain through the part is +4). Beyond this level,
the signal path will saturate and limit the signal swing. This is
not a desired operation, as the supply current will increase and
the signal path will be slow to recover from clipping. The
absolute maximum allowed differential input signal is limited
by long-term reliability of the input stage. The limits in the
Absolute Maximum Ratings section of the data sheet should be
observed to avoid degrading device performance permanently.
AC Coupling of Inputs
It is possible to ac-couple the inputs of the AD8176 receiver, so
that bias current does not need to be supplied externally. A
capacitor in series with the inputs to the AD8176 creates a highpass filter with the input impedance of the device. This capacitor
needs to be sized large enough so that the corner frequency
includes all frequencies of interest.
Single-Ended Input
The AD8176 input receiver can be driven single-endedly (unbalanced). Single-ended inputs apply a component of commonmode signal to the receiver inputs, which is then rejected by the
receiver (see the
Specifications section for common-mode-to-
differential-mode ratio of the part).
The single-ended input resistance, R
, differs from the differen-
IN
tial input impedance, and is equal to
R
=
IN
1
and RF, as shown in Figure 49.
with R
G
Note that this value is smaller than the differential input
resistance, but it is larger than R
component of common-mode level applied to the receiver by
single-ended inputs. A second, smaller component of input
resistance (R
inputs in both single-ended and differential operation.
In single-ended operation, an input is driven, and the undriven
input is often tied to midsupply or ground. Because signalfrequency current flows at the undriven input, such input
should be treated as a signal line in the board design.
For example, to achieve best dynamic performance, the undriven
input should be terminated with an impedance matching that
seen by the part at the driven input.
Differential Output
Benefits of Differential Operation
The AD8176 has a fully-differential switch core with differential
outputs. The two output voltages move in opposite directions,
with a differential feedback loop maintaining a fixed output
stage differential gain of +2 through the core. This differential
output stage provides improved crosstalk cancellation due to
parasitic coupling from one output to another being equal and
out of phase. Additionally, if the output of the device is utilized
in a differential design, then noise, crosstalk, and offset voltages
generated on-chip that are coupled equally into both outputs
are cancelled by the common-mode rejection ratio of the next
device in the signal chain. By utilizing the AD8176 outputs in a
differential application, the best possible noise and offset
specifications can be realized.
Differential Gain
The specified signal path gain of the AD8176 refers to its
differential gain. For the AD8176, the gain of +4 means that the
difference in voltage between the two output terminals is equal
to four times the difference between the two input terminals.
Common-Mode Gain
The common mode, or average voltage pairs of output signals is
set by the voltage on the VOCM_CMENCOFF pin when
common-mode encoding is off (CMENC is a logic low), or by
the voltage on the VOCM_CMENCON pin when commonmode encoding is on (CMENC is a logic high). Note that in the
latter case, VCOM_CMENCON sets the overall common-mode
of RGB triplets of differential outputs, while the individual
common-mode of each RGB output is free to change. VCOM_
CMENCON and VCOM_CMENCOFF are typically set to
midsupply (often ground), but can be moved approximately
±0.5 V to accommodate cases where the desired output commonmode voltage may not be midsupply (as in the case of unequal
R
G
R
−
, also shown in Figure 49) is present across the
CM
F
G
(1)
)(2
RR
+×
F
. The difference is due to the
G
Rev. 0 | Page 30 of 40

AD8176
split supplies). Adjusting the output common-mode voltage
beyond ±0.5 V can limit differential swing internally below the
specifications on the data sheet. The overall common-mode of
the output voltages follow the voltage applied to VOCM_
CMENCON or VCOM_CMENCOFF, implying a gain of +1.
Likewise, sync-on common-mode signaling is carried through
the AD8176 (CMENC must be in its high state), implying a gain
of +1 for this path as well.
The common-mode reference pins are analog signal inputs,
common to all output stages on the device. They require only
small amounts of bias current, but noise appearing on these
pins is buffered to all the output stages. As such, they should
be connected to low noise, low impedance voltage references
to avoid being sources of noise, offset, and crosstalk in the
signal path.
Te r m in a t i o n
The AD8176 is designed to drive 100 terminated to ground
on each output (or an effective 200 differential) while
meeting data sheet specifications over the specified operating
temperature range, if care is taken to observe the maximum
power derating curves.
Termination at the load end is recommended to shorten settling
time and for best signal integrity. In differential signal paths, it
is often desirable to series-terminate the outputs, with a resistor
in series with each output. A side effect of termination is an
attenuation of the output signal by a factor of two. In this case,
gain is usually necessary somewhere else in the signal path to
restore the signal level.
Whenever a differential output is used single-ended, it is
desirable to terminate the used single-ended output with a
series resistor, as well as to place a resistor on the unused output
to match the load seen by the used output.
When disabled, the outputs float to midsupply. A small current
is required to drive the outputs away from their midsupply
state. This current is easily provided by an AD8176 output (in
its enabled state) bussed together with the disabled output.
Exceeding the allowed output voltage range may saturate
internal nodes in the disabled output, and consequently an
increase in disabled output current may be observed.
Single-Ended Output
Usage
The AD8176 output pairs can be used single-ended, taking
only one output and not using the second. This is often desired
to reduce the routing complexity in the design, or because a
single-ended load is being driven directly. This mode of operation produces good results, but has some shortcomings when
compared to taking the output differentially. When observing
the single-ended output, noise that is common to both outputs
appears in the output signal.
When observing the output single-ended, the distribution
of offset voltages appear greater. In the differential case, the
difference between the outputs when the difference between
the inputs is zero is a small differential offset. This offset is
created from mismatches in devices in the signal path. In the
single-ended case, this differential offset is still observed, but
an additional offset component is also relevant. This additional
component is the common-mode offset, which is the difference
between the average of the outputs and the output commonmode reference. This offset is created by mismatches that affect
the signal path in a common-mode manner. A differential
receiver rejects this common-mode offset voltage, but in the
single-ended case, this offset is observed with respect to the
signal ground. The single-ended output sums half the differential
offset voltage and all of the common-mode offset voltage for a
net increase in observed offset.
Single-Ended Gain
The AD8176 operates as a closed-loop differential amplifier.
The primary control loop forces the difference between the
output terminals to be a ratio of the difference between the
input terminals. One output increases in voltage, while the
other decreases an equal amount to make the total output
voltage difference correct. The average of these output voltages
is forced to the voltage on the common-mode reference
terminal (VOCM_CMENCOFF or VOCM_CMENCON) by a
second control loop. If only one output terminal is observed
with respect to the common-mode reference terminal, only half
of the difference voltage will be observed. This implies that
when using only one output of the device, half of the differential
gain is observed. An AD8176 taken with single-ended output
appears to have a gain of +2.
It is important to note that all considerations applying to the
used output phase regarding output voltage headroom, apply
unchanged to the complement output phase even if this is not
actually used.
Te r m in a t i o n
When operating the AD8176 with a single-ended output, the
preferred output termination scheme is to refer the load to the
output common-mode. A series-termination can be used, at an
additional cost of one half the signal gain.
In single-ended output operation, the complementary phase of
the output is not used, and may or may not be terminated
locally. Although the unused output can be floated to reduce
power dissipation, there are several reasons for terminating the
unused output with a load resistance matched to the load on the
signal output.
One component of crosstalk is magnetic coupling by mutual
inductance between output package traces and bond wires that
carry load current. In a differential design, there is coupling
from one pair of outputs to other adjacent pairs of outputs. The
differential nature of the output signal simultaneously drives the
coupling field in one direction for one phase of the output, and
in an opposite direction for the other phase of the output. These
Rev. 0 | Page 31 of 40

AD8176
(
)
−
=
(
−
=
magnetic fields do not couple equally into adjacent output pairs
due to different proximities, but they do destructively cancel the
crosstalk to some extent. If the load current in each output is
equal, this cancellation is greater and less adjacent crosstalk is
observed (regardless of whether the second output is actually
being used).
A second benefit of balancing the output loads in a differential
pair is to reduce fluctuations in current requirements from the
power supply. In single-ended loads, the load currents alternate
from the positive supply to the negative supply. This creates a
parasitic signal voltage in the supply pins due to the finite
resistance and inductance of the supplies. This supply fluctuation
appears as crosstalk in all outputs, attenuated by the power
supply rejection ratio (PSRR) of the device. At low frequencies,
this is a negligible component of crosstalk, but PSRR falls off as
frequency increases. With differential, balanced loads, as one
output draws current from the positive supply, the other output
draws current from the negative supply. When the phase
alternates, the first output draws current from the negative
supply and the second from the positive supply. The effect is
that a more constant current is drawn from each supply, such
that the crosstalk-inducing supply fluctuation is minimized.
A third benefit of driving balanced loads can be seen if one
considers that the output pulse response changes as load
changes. The differential signal control loop in the AD8176
forces the difference of the outputs to be a fixed ratio to the
difference of the inputs. If the two output responses are different
due to loading, this creates a difference that the control loop
sees as signal response error, and it attempts to correct this
error. This distorts the output signal from the ideal response
compared to the case when the two outputs are balanced.
Decoupling
The signal path of the AD8176 is based on high open-loop gain
amplifiers with negative feedback. Dominant-pole compensation
is used on-chip to stabilize these amplifiers over the range of
expected applied swing and load conditions. To guarantee this
designed stability, proper supply decoupling is necessary with
respect to both the differential control loops and the commonmode control loops of the signal path. Signal-generated currents
must return to their sources through low impedance paths at all
frequencies in which there is still loop gain (up to 700 MHz at a
minimum).
The signal path compensation capacitors in the AD8176 are
connected to the VNEG supply. At high frequencies, this limits
the power supply rejection ratio (PSRR) from the VNEG supply
to a lower value than that from the VPOS supply. If given a
choice, an application board should be designed such that the
VNEG power is supplied from a low inductance plane, subject
to a least amount of noise.
VOCM_CMENCON and VOCM_CMENCOFF are high speed
common-mode control loops of all output drivers. In the singleended output sense, there is no rejection from noise on these
inputs to the outputs. For this reason, care must be taken to
produce low noise sources over the entire range of frequencies
of interest. This is not only important to single-ended operation,
but to differential operation, as there is a common-mode-todifferential gain conversion that becomes greater at higher
frequencies.
VOCM_CMENCON and VOCM_CMENCOFF are internally
buffered to prevent transients flowing into or out of these inputs
from acting on the source impedance and becoming sources of
crosstalk.
Power Dissipation
Calculation of Power Dissipation
10
9
8
7
6
5
MAXIMUM POWER (W)
4
3
15 25 35 45 55 65 75 85
AMBIENT TEMP ERATURE (°C)
Figure 50. Maximum Die Power Dissipation vs. Ambient Temperature
TJ = 150°C
06596-024
The curve in Figure 50 was calculated from
−
TT
=
P
,
MAXD
,
AMBIENTMAXJUNCTION
θ
JA
(2)
As an example, if the AD8176 is enclosed in an environment at
45°C (T
), the total on-chip dissipation under all load and
A
supply conditions must not be allowed to exceed 7.0 W.
When calculating on-chip power dissipation, it is necessary to
include the power dissipated in the output devices due to
current flowing in the loads. For a sinusoidal output about
ground and symmetrical split supplies, the on-chip power
dissipation due the load can be approximated by
IVVP
OUTPUTD
,
OPOS
×
RMSUTPUT
,
(3)
RMSOUTPUT
,
For nonsinusoidal output, the power dissipation should be
calculated by integrating the on-chip voltage drop across the
output devices multiplied by the load current over one period.
The user can subtract the quiescent current for the Class AB
output stage when calculating the loaded power dissipation. For
each output stage driving a load, subtract a quiescent power,
according to
)
IVVP
where I
OUTPUTDQ
OUTPUT, QUIESCENT
×
NEGPOS
QUIESCENTOUTPUT
,,
= 1.65 mA for each single-ended output
(4)
pin for the AD8176.
Rev. 0 | Page 32 of 40

AD8176
Q
V
+
=
(
)
P
P
PnP
P
For each disabled RGB output channel, the quiescent
power supply current in VPOS and VNEG drops by approximately 34 mA.
POS
I
NPN
QPNP
Figure 51. Simplified Output Stage
O, QUI ESCENT
I
O, QUI ESCENT
V
NEG
V
OUTPUT
I
OUTPUT
06596-025
Example
For the AD8176, with an ambient temperature of 85°C, all nine
RGB output channels driving 1 V rms into 100 loads, and
power supplies at ±2.5 V, follow these steps:
1. Calculate power dissipation of AD8176 using data sheet
quiescent currents. Neglecting V
current, as it is
DD
insignificant.
()(
,
QUIESCENTD
P
,
QUIESCENTD
×=
()()
)
IVIVP ×
(5)
VNEGNEGVPOSPOS
×+×=
W3mA600V5.2mA600V5.2
2. Calculate power dissipation from loads. For a differential
output and ground-referenced load, the output power is
symmetrical in each output phase.
IVVP
OUTPUTD
P
,
OUTPUTD
POS
()
×−= (6)
()
RMSOUTPUTRMSOUTPUT
,,,
mW15100/V1V1V5.2
=×−=
There are 27 output pairs, or 54 output currents.
n
,
OUTPUTD
=×=
W81.0mW1554
3. Subtract quiescent output stage current for number of
loads (54 in this example). The output stage is either
standing or driving a load, but the current only needs to be
counted once (valid for output voltages > 0.5 V).
OUTPUTDQ
P
,
OUTPUTDQ
()
()
IVVP
×−= (7)
NEGPOS
QUIESCENTOUTPUT
,,
mW25.8mA65.1V)5.2(V5.2
=×−−=
There are 27 output pairs, or 54 output currents.
n
,
OUTPUTD
=×=
W45.0mW25.854
4. Verify that the power dissipation does not exceed the
maximum allowed value.
OUTPUTDQOUTPUTDQUIESCENTD
,,,
W36.3W45.0W81.0W3
(8)
PP
−
CHIPOND
,
,
−CHIPOND
From
Figure 50 or Equation 2, this power dissipation is below
n
−+=
=−+=
the maximum allowed dissipation for all ambient temperatures
up to and including 85°C.
In a general case, the power delivered by the digital supply and
dissipated into the digital output devices has to be taken into
account following a similar derivation. However, because the
loads driven by the H and V outputs are high and the voltage at
these outputs typically sits close either rail, the correction to the
on-chip power estimate is small. Furthermore, the H and V
outputs are active only briefly during sync generation and
returned to digital ground thereafter.
Short-Circuit Output Conditions
Although there is short-circuit current protection on the
AD8176 outputs, the output current can reach values of 80 mA
into a grounded output. Any sustained operation with too many
shorted outputs can exceed the maximum die temperature
and can result in device failure (see the
Ratings
section).
Absolute Maximum
Crosstalk
Many systems (such KVM switches) that handle numerous
analog signal channels have strict requirements for keeping the
various signals from influencing any of the other signals in the
system. Crosstalk is the term used to describe the coupling of
the signals of other nearby channels to a given channel.
When there are many signals in close proximity in a system, as
is undoubtedly the case in a system that uses the AD8176, the
crosstalk issues can be quite complex. A good understanding of
the nature of crosstalk and some definition of terms is required
to specify a system that uses one or more crosspoint devices.
Types of C ro s stal k
Crosstalk can be propagated by means of any of three methods.
These fall into the categories of electric field, magnetic field,
and the sharing of common impedances. This section explains
these effects.
Every conductor can be both a radiator of electric fields and a
receiver of electric fields. The electric field crosstalk mechanism
occurs when the electric field created by the transmitter
propagates across a stray capacitance (for example, free space)
and couples with the receiver and induces a voltage. This
voltage is an unwanted crosstalk signal in any channel that
receives it.
Currents flowing in conductors create magnetic fields that
circulate around the currents. These magnetic fields then
generate voltages in any other conductors whose paths they
link. The undesired induced voltages in these other channels are
crosstalk signals. The channels that crosstalk can be said to have
a mutual inductance that couples signals from one channel to
another.
The power supplies, grounds, and other signal return paths
of a multichannel system are generally shared by the various
channels. When a current from one channel flows in one of
these paths, a voltage that is developed across the impedance
Rev. 0 | Page 33 of 40

AD8176
becomes an input crosstalk signal for other channels that share
the common impedance.
All these sources of crosstalk are vector quantities, so the
magnitudes cannot simply be added together to obtain the total
crosstalk. In fact, there are conditions where driving additional
circuits in parallel in a given configuration can actually reduce
the crosstalk. The fact that the AD8176 is a fully-differential
design means that many sources of crosstalk either destructively
cancel, or are common-mode to the signal and can be rejected
by a differential receiver.
Areas of Crosstalk
A practical AD8176 circuit must be mounted to an actual
circuit board in order to connect it to power supplies and
measurement equipment. Great care has been taken to create an
evaluation board (available upon request) that adds minimum
crosstalk to the intrinsic device. This, however, raises the issue
that a system’s crosstalk is a combination of the intrinsic crosstalk
of the devices in addition to the circuit board to which they are
mounted. It is important to try to separate these two areas when
attempting to minimize the effect of crosstalk.
In addition, crosstalk can occur among the inputs to a crosspoint
and among the outputs. It can also occur from input to output.
In the following sections, techniques are discussed for diagnosing
which part of a system is contributing to crosstalk.
Measuring Crosstalk
Crosstalk is measured by applying a signal to one or more
channels and measuring the relative strength of that signal on a
desired selected channel. The measurement is usually expressed
as decibels down from the magnitude of the test signal. The
crosstalk is expressed by
XT
⎛
=
⎜
log20
10
⎜
⎝
SEL
TEST
⎞
sA
)(
⎟
(9)
⎟
sA
)(
⎠
where:
s is the Laplace transform variable (s = jω).
A
(s) is the amplitude of the crosstalk induced signal in the
SEL
selected channel.
A
(s) is the amplitude of the test signal.
TEST
It can be seen that crosstalk is a function of frequency, but not a
function of the magnitude of the test signal (to first order). In
addition, the crosstalk signal has a phase relative to the test
signal associated with it.
A network analyzer is most commonly used to measure
crosstalk over a frequency range of interest. It can provide both
magnitude and phase information about the crosstalk signal.
As a crosspoint system or device grows larger, the number
of theoretical crosstalk combinations and permutations can
become extremely large. For example, in the case of the triple
16 × 9 matrix of the AD8176, look at the number of crosstalk
terms that can be considered for a single channel, say input
channel INPUT0. INPUT0 is programmed to connect to one of
the AD8176 outputs where the measurement can be made.
First, the crosstalk terms associated with driving a test signal
into each of the other 15 input channels can be measured one at
a time, while applying no signal to INPUT0. Then, the crosstalk
terms associated with driving a parallel test signal into all 15
other inputs can be measured two at a time in all possible
combinations, then three at a time, and so on, until, finally,
there is only one way to drive a test signal into all 15 other input
channels in parallel.
Each of these cases is legitimately different from the others and
can yield a unique value, depending on the resolution of the
measurement system, but it is hardly practical to measure all
these terms and then specify them. In addition, this describes
the crosstalk matrix for just one input channel. A similar
crosstalk matrix can be proposed for every other input. In
addition, if the possible combinations and permutations for
connecting inputs to the other outputs (not used for measurement) are taken into consideration, the numbers rather quickly
grow to astronomical proportions. If a larger crosspoint array of
multiple AD8176s is constructed, the numbers grow larger still.
Obviously, some subset of all these cases must be selected to be
used as a guide for a practical measure of crosstalk. One
common method is to measure all hostile crosstalk; this means
that the crosstalk to the selected channel is measured while all
other system channels are driven in parallel. In general, this
yields the worst crosstalk number, but this is not always the
case, due to the vector nature of the crosstalk signal.
Other useful crosstalk measurements are those created by one
nearest neighbor or by the two nearest neighbors on either side.
These crosstalk measurements are generally higher than those
of more distant channels, so they can serve as a worst-case
measure for any other one-channel or two-channel crosstalk
measurements.
Input and Output Crosstalk
Capacitive coupling is voltage-driven (dV/dt), but is generally a
constant ratio. Capacitive crosstalk is proportional to input or
output voltage, but this ratio is not reduced by simply reducing
signal swings. Attenuation factors must be changed by changing
impedances (lowering mutual capacitance), or destructive
canceling must be utilized by summing equal and out of phase
components. For high input impedance devices such as the
AD8176, capacitances generally dominate input-generated
crosstalk.
Inductive coupling is proportional to current (dI/dt), and often
scales as a constant ratio with signal voltage, but also shows a
dependence on impedances (load current). Inductive coupling
can also be reduced by constructive canceling of equal and out
of phase fields. In the case of driving low impedance video
loads, output inductances contribute highly to output crosstalk.
Rev. 0 | Page 34 of 40

AD8176
The flexible programming capability of the AD8176 can be used
to diagnose whether crosstalk is occurring more on the input
side or the output side. Some examples are illustrative. A given
input channel (INPUT7 roughly in the middle for this example)
can be programmed to drive OUTPUT4 (exactly in the middle).
The inputs to INPUT7 are just terminated to ground (via 50
or 75 ) and no signal is applied.
All the other inputs are driven in parallel with the same test
signal (practically provided by a distribution amplifier), with all
other outputs except OUTPUT4 disabled. Because grounded
INPUT7 is programmed to drive OUTPUT4, no signal should
be present. Any signal that is present can be attributed to the
other 15 hostile input signals, because no other outputs are
driven (they are all disabled). Thus, this method measures the
all hostile input contribution to crosstalk into INPUT7. Of
course, the method can be used for other input channels and
combinations of hostile inputs.
For output crosstalk measurement, a single input channel is
driven (INPUT0, for example) and all outputs other than a
given output (OUTPUT4 in the middle) are programmed to
connect to INPUT0. OUTPUT4 is programmed to connect to
INPUT15 (far away from INPUT0), which is terminated to
ground. Thus, OUTPUT4 should not have a signal present
because it is listening to a quiet input. Any signal measured at
the OUTPUT4 can be attributed to the output crosstalk of the
other eight hostile outputs. Again, this method can be modified
to measure other channels and other crosspoint matrix
combinations.
Effect of Impedances on Crosstalk
The input side crosstalk can be influenced by the output
impedance of the sources that drive the inputs. The lower the
impedance of the drive source, the lower the magnitude of the
crosstalk. The dominant crosstalk mechanism on the input side
is capacitive coupling. The high impedance inputs do not have
significant current flow to create magnetically induced crosstalk.
However, significant current can flow through the input termination resistors and the loops that drive them. Thus, the PC
board on the input side can contribute to magnetically coupled
crosstalk.
From a circuit standpoint, the input crosstalk mechanism looks
like a capacitor coupling to a resistive load. For low frequencies,
the magnitude of the crosstalk is given by
[
10
S
]
sCRXT
×= )(log20
(10)
M
where:
R
is the source resistance.
S
C
is the mutual capacitance between the test signal circuit and
M
the selected circuit.
s is the Laplace transform variable.
From Equation 10, it can be observed that this crosstalk
mechanism has a high-pass nature; it can also be minimized by
reducing the coupling capacitance of the input circuits and
lowering the output impedance of the drivers. If the input is
driven from a 75 terminated cable, the input crosstalk can be
reduced by buffering this signal with a low output impedance
buffer.
On the output side, the crosstalk can be reduced by driving a
lighter load. Although the AD8176 is specified with excellent
settling time when driving a properly terminated Cat-5, the
crosstalk is higher than the minimum obtainable due to the
high output currents. These currents induce crosstalk via the
mutual inductance of the output pins and bond wires of the
AD8176.
From a circuit standpoint, this output crosstalk mechanism
looks like a transformer with a mutual inductance between the
windings that drives a load resistor. For low frequencies, the
magnitude of the crosstalk is given by
⎛
⎜
MXT
log20
10
XY
⎜
⎝
⎞
s
⎟
×=
(11)
⎟
R
L
⎠
where:
M
is the mutual inductance of output X to output Y.
XY
is the load resistance on the measured output.
R
L
This crosstalk mechanism can be minimized by keeping
the mutual inductance low and increasing R
. The mutual
L
inductance can be kept low by increasing the spacing of the
conductors and minimizing their parallel length.
PCB Layout
Extreme care must be exercised to minimize additional
crosstalk generated by the system circuit board(s). The areas
that must be carefully detailed are grounding, shielding, signal
routing, and supply bypassing.
The packaging of the AD8176 is designed to help keep the
crosstalk to a minimum. On the BGA substrate, each pair is
carefully routed to predominately couple to each other, with
shielding traces separating adjacent signal pairs. The ball grid
array is arranged such that similar board routing can be achieved.
Input and output differential pairs are grouped by channel
rather than by color to allow for easy, convenient board routing.
The input and output signals have minimum crosstalk if they
are located between ground planes on layers above and below,
and separated by ground in between. Vias should be located as
close to the IC as possible to carry the inputs and outputs to the
inner layer. The input and output signals surface at the input
termination resistors and the output series back-termination
resistors. To the extent possible, these signals should also be
separated as soon as they emerge from the IC package.
Rev. 0 | Page 35 of 40

AD8176
(
)
d
PCB Termination Layout
As frequencies of operation increase, the importance of proper
transmission line signal routing becomes more important. The
bandwidth of the AD8176 is large enough that using high
impedance routing does not provide a flat in-band frequency
response for practical signal trace lengths. It is necessary for the
user to choose a characteristic impedance suitable for the application and properly terminate the input and output signals of the
AD8176. Traditionally, video applications have used 75
single-ended environments. RF applications are generally 50
single-ended (and board manufacturers have the most experience
with this application). CAT- cabling is usually driven as
differential pairs of 100 differential impedance.
For flexibility, the AD8176 does not contain on-chip termination resistors. This flexibility in application comes with some
board layout challenges. The distance between the termination
of the input transmission line and the AD8176 die is a high
impedance stub, and causes reflections of the input signal. With
some simplification, it can be shown that these reflections cause
peaking of the input at regular intervals in frequency, dependent
on the propagation speed (V
) of the signal in the chosen board
P
material and the distance (d) between the termination resistor
and the AD8176. If the distance is great enough, these peaks
can occur in-band. In fact, practical experience shows that these
peaks are not high-Q, and should be pushed out to three or four
times the desired bandwidth in order to not have an effect on
the signal. For a board designer using FR4 (V
= 144 × 106 m/s),
P
this means the AD8176 should be no more than 1.5 cm after the
termination resistors, and preferably should be placed even
closer. The BGA substrate routing inside the AD8176 is approximately 1 cm in length and adds to the stub length, so 1.5 cm
PCB routing equates to d = 2.5 × 10
12 +
Vn
f
PEAK
=
P
(12)
4
–2
m in the calculations.
where n = {0, 1, 2, 3, …}.
In some cases, it is difficult to place the termination close to the
AD8176 due to space constraints, differential routing, and large
resistor footprints. A preferable solution in this case is to
maintain a controlled transmission line past the AD8176 inputs
and terminate the end of the line. This is known as fly-by
termination. The input impedance of the AD8176 is large
enough and stub length inside the package is small enough that
this works well in practice. Implementation of fly-by input
termination often includes bringing the signal in on one routing
layer, then passing through a filled-via under the AD8176 input
ball, then back out to termination on another signal layer. In
this case, care must be taken to tie the reference ground planes
together near the signal via if the signal layers are referenced to
different ground planes.
If multiple AD8176s are to be driven in parallel, a fly-by input
termination scheme is very useful, but the distance from each
AD8176 input to the driven input transmission line is a stub
that should be minimized in length and parasitics using the
discussed guidelines.
AD8176
IPn
INn
50Ω
Figure 52. Fly-By Input Termination (Grounds for the two transmission lines
shown must be tied together close to the INn pin)
OPn
ONn
6596-026
When driving the AD8176 single-endedly, the undriven input is
often terminated with a resistance to balance the input stage. It
can be seen that by terminating the undriven input with a
resistor of one-half the characteristic impedance, the input stage
will be perfectly balanced (25 , for example, to balance the two
parallel 50 terminations on the driven input). However, due
to the feedback in the input receiver, there is high speed signal
current leaving the undriven input. To terminate this high
speed signal, proper transmission line techniques should be
used. One solution is to adjust the trace width to create a
transmission line of half the characteristic impedance and
terminate the far end with this resistance (25 in a 50
system). This is not often practical as trace widths become large.
In most cases, the best practical solution is to place the halfcharacteristic impedance resistor as close as possible (preferably
less than 1.5 cm away) and to reduce the parasitics of the stub
(by removing the ground plane under the stub, for example). In
either case, the designer must decide if the layout complexity
created by a balanced, terminated solution is preferable to
simply grounding the undriven input at the ball with no trace.
While the examples discussed so far are for input termination,
the theory is similar for output back-termination. Taking the
AD8176 as an ideal voltage source, any distance of routing
between the AD8176 and a back-termination resistor will be an
impedance mismatch that potentially creates reflections. For
this reason, back-termination resistors should also be placed
close to the AD8176. In practice, because back-termination
resistors are series elements, they can be placed close to the
AD8176 outputs.
Finally, the AD8176 pinout allows the user to bring the outputs
out as surface traces to the back-termination resistors. The
designer can avoid creating stubs and reflections by keeping the
AD8176 output signal path on the surface of the board. A stub
is created when a top-to-bottom via connection is made on the
output signal path that is perpendicular to the signal flow.
Rev. 0 | Page 36 of 40

AD8176
VPOS VDD
15-PIN HD
CONNECTOR
15-PIN HD
CONNECTOR
15-PIN HD
CONNECTORS
PC
RGB, HV
CHANNEL
AD8147 (G = +2)
EVALUATION BOARD
SIGNAL G ENERATOR/
NETWORK ANALYZER
PC
PC
FOUR 15-P IN HD
CONNECT ORS
FOUR RGB, HV
CHANNELS
IN0 TO IN3
FOUR 15-P IN HD
CONNECT ORS
FOUR RGB, HV
CHANNELS
IN4 TO IN7
RJ-45
CONNECT OR
CAT5
IN8 TO IN11
FOUR RJ-45
CONNECTORS
TWELVE SMA
CONNECTORS
IN12 TO IN13
FOUR AD8147
(G = +2)
FOUR AD8147
(G = +2)
DIFFERENTIAL
OFFSET
FOUR DIFFERENTIAL
RGBWITHSYNC-ON
CM CHANNELS
TWO
DIFFERENTIAL
RGB CHANNELS
IN0 TO IN3
IN4 TO IN7
AD8176 DUT
THREE RGB
CHANNELS
OUT0 TO OUT2
OUT3 TO OUT5
OUT6IN8 TO IN11
OUT7IN12 TO IN13
OUT8IN14 TO IN15
DIFFERENTIAL
RGB, HV
CHANNEL
AD8003
(G = +4)
THREE HV
PAIRS
THREE RGB, HV
CHANNELS
DIFFERENTIAL
RGB WITH
SYNC-ON CM
EIGHT SMA
CONNECTORS
THREE 15-P IN HD
CONNECT ORS
THREE RGB, HV
CHANNELS
OUT0 TO OUT2
THREE 15-P IN HD
CONNECT ORS
THREE RGB, HV
CHANNELS
OUT3 TO OUT5
RJ-45
CONNECT OR
AD8145
(G = +2)
CAT-5
OUT6
DIFFERENTIAL
RGB, HV
OUT7
RGB
MONITOR
RGB
MONITOR
RGB, HV
CHANNEL
RGB
MONITOR
HIGH SPEED
SCOPE/
NETWO RK
ANALYZER
GORE
HEADER
OUT8
06596-057
IN14 TO IN15
TWO GORE
HEADERS
AD8176
CUSTOM ER
EVALUAT ION BO ARD
GND VNEG TO CONTROLLER PC USB
RIBBON CABLE
NATIONAL
INSTRUMENTS
CONTROLL ER BOARD
USB
Figure 53. Evaluation Board Schematic
Rev. 0 | Page 37 of 40

AD8176
OUTLINE DIMENSIONS
27.20
27.00 SQ
26.80
A1 BALL
PAD CORNER
TOP VIEW
24.20
24.00 SQ
23.80
1.00
BSC
18
22
26
20
232425
21
14
19
13
151617
11
1012
9
A1 CORNER
INDEX AREA
678
234
5
1
A
B
C
D
E
F
G
H
J
K
L
M
N
P
R
T
U
V
W
Y
AA
AB
AC
AD
AE
AF
2.43
2.32
2.15
DETAIL A
0.60
0.55
0.50
0.70
0.60
0.50
COMPLIANT TO JEDEC STANDARDS MS-034-AAL-1
DETAIL A
0.70
0.60
0.50
BALL DIAM ETER
SEATING
PLANE
1.19
1.17
1.15
COPLANARITY
0.20 MAX
070207-B
Figure 54. 676-Ball Plastic Ball Grid Array [PBGA]
(B-676)
Dimensions shown in millimeters
ORDERING GUIDE
Model Temperature Range Package Description Package Option
AD8176ABPZ
AD8176-EVALZ
1
Z = RoHS Compliant Part.
1
−40°C to +85°C 676-Ball Plastic Ball Grid Array [PBGA] B-676
1
Evaluation Board
Rev. 0 | Page 38 of 40

AD8176
NOTES
Rev. 0 | Page 39 of 40

AD8176
NOTES
©2007 Analog Devices, Inc. All rights reserved. Trademarks and
registered trademarks are the property of their respective owners.
D06596-0-7/07(0)
Rev. 0 | Page 40 of 40
 Loading...
Loading...