

Low Noise, 90 MHz
www.BDTIC.com/ADI
FEATURES
Linear-in-dB gain control
Pin-programmable gain ranges
−11 dB to +31 dB with 90 MHz bandwidth
9 dB to 51 dB with 9 MHz bandwidth
Any intermediate range, for example −1 dB to +41 dB
with 30 MHz b
Bandwidth independent of variable gain
1.3 nV/√Hz input noise spectral density
±0.5 dB typical gain accuracy
APPLICATIONS
RF/IF AGC amplifiers
Video gain controls
A/D range extensions
Signal measurements
GENERAL DESCRIPTION
The AD603 is a low noise, voltage-controlled amplifier for use
in RF and IF AGC systems. It provides accurate, pin-selectable
gains of −11 dB to +31 dB with a bandwidth of 90 MHz or +9 dB to
51+ dB with a bandwidth of 9 MHz. Any intermediate gain
range may be arranged using one external resistor. The input
referred noise spectral density is only 1.3 nV/√Hz, and power
consumption is 125 mW at the recommended ±5 V supplies.
andwidth
Variable Gain Amplifier
AD603
The decibel gain is linear in dB, accurately calibrated, and stable
ver temperature and supply. The gain is controlled at a high
o
impedance (50 MΩ), low bias (200 nA) differential input; the
scaling is 25 mV/dB, requiring a gain control voltage of only
1 V to span the central 40 dB of the gain range. An overrange
and underrange of 1 dB is provided whatever the selected range.
The gain control response time is less than 1 μs for a 40 dB change.
The differential gain control interface allows the use of either
ferential or single-ended positive or negative control voltages.
dif
Several of these amplifiers may be cascaded and their gain
control gains offset to optimize the system SNR.
The AD603 can drive a load impedance as low as 100 Ω with
lo
w distortion. For a 500 Ω load in shunt with 5 pF, the total
harmonic distortion for a ±1 V sinusoidal output at 10 MHz is
typically −60 dBc. The peak specified output is ±2.5 V minimum
into a 500 Ω load.
The AD603 uses a patented proprietary circuit topology—the
X-AM
P®. The X-AMP comprises a variable attenuator of 0 dB
to −42.14 dB followed by a fixed-gain amplifier. Because of the
attenuator, the amplifier never has to cope with large inputs and
can use negative feedback to define its (fixed) gain and dynamic
performance. The attenuator has an input resistance of 100 Ω,
laser trimmed to ±3%, and comprises a 7-stage R-2R ladder
network, resulting in an attenuation between tap points of
6.021 dB. A proprietary interpolation technique provides a
continuous gain control function that is linear in dB.
The AD603 is specified for operation from −40°C to +85°C.
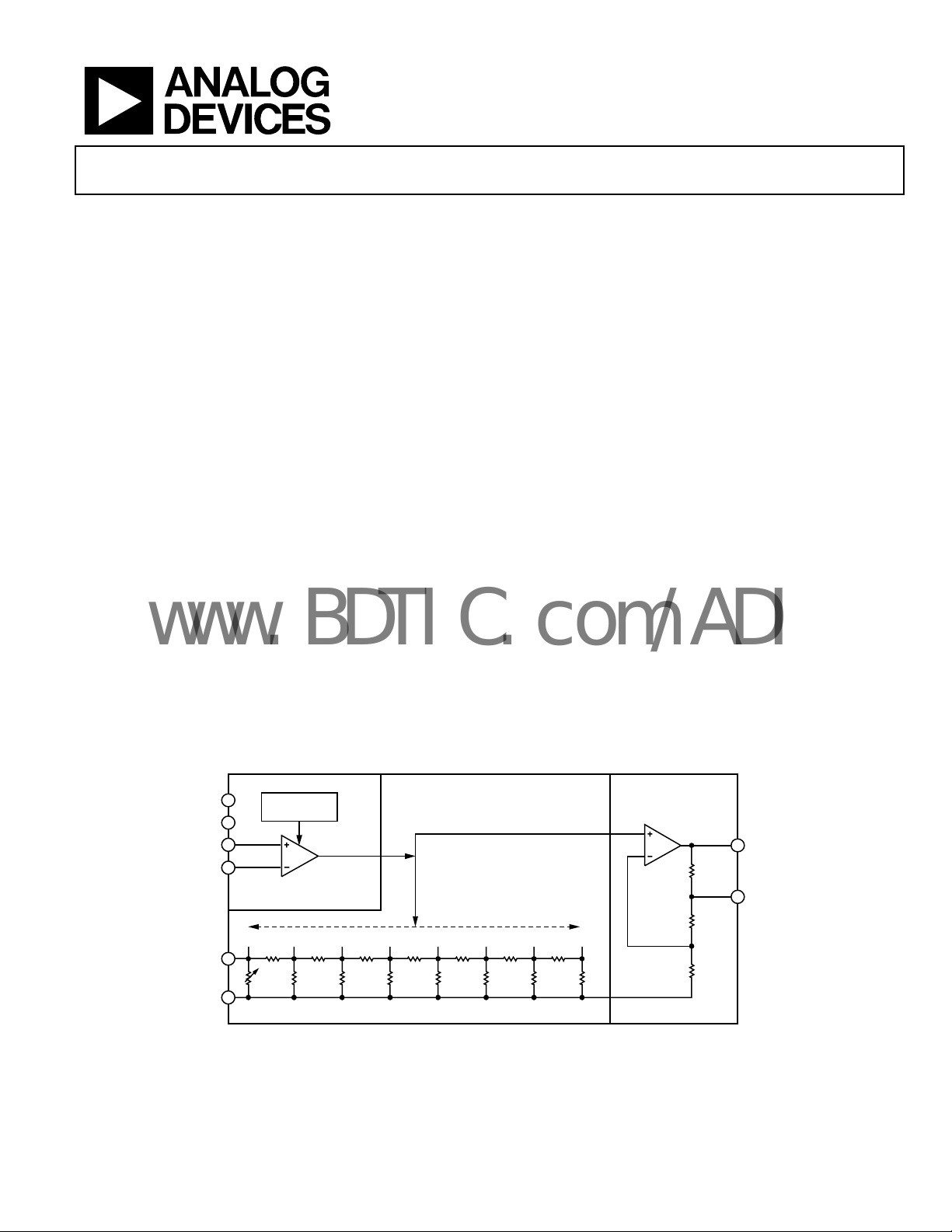
FUNCTIONAL BLOCK DIAGRAM
8
VPOS
6
VNEG
1
GPOS
2
GNEG
3
VINP
4
COMM
*NOMINAL VALUES.
Rev. H
Information furnished by Analog Devices is believed to be accurate and reliable. However, no
responsibility is assumed by Anal og Devices for its use, nor for any infringements of patents or ot her
rights of third parties that may result from its use. Specifications subject to change without notice. No
license is granted by implication or otherwise under any patent or patent rights of Analog Devices.
Trademarks and registered trademarks are the property of their respective owners.
SCALING
REFERENCE
V
G
GAIN-
CONTROL
INTERFACE
0dB –6.02dB –12.04dB –18.06dB –24.08dB –30.1dB –36.12dB –42.14dB
RRRRRRR
2R 2R 2R 2R 2R 2R R
R-2R LADDER NETWORK
PRECISION PASSIVE
INPUT ATTENUATOR
FIXED-GAIN
AMPLIFIER
7
VOUT
AD603
Figure 1.
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781.329.4700 www.analog.com
Fax: 781.461.3113 ©2007 Analog Devices, Inc. All rights reserved.
6.44kΩ*
694Ω*
20Ω*
5
FDBK
00539-001

AD603
www.BDTIC.com/ADI
TABLE OF CONTENTS
Features .............................................................................................. 1
Applications....................................................................................... 1
General Description......................................................................... 1
Functional Block Diagram .............................................................. 1
Revision History ............................................................................... 2
Specifications..................................................................................... 3
Absolute Maximum Ratings............................................................ 4
ESD Caution.................................................................................. 4
Pin Configurations and Function Descriptions ...........................5
Typical Performance Characteristics ............................................. 6
Theory of Operation ...................................................................... 11
Noise Performance .....................................................................11
The Gain Control Interface....................................................... 12
REVISION HISTORY
5/07—Rev. G to Rev. H
Changes to Layout...........................................................................14
Changes to Layout...........................................................................15
Changes to Layout...........................................................................16
Inserted Evaluation Board Section, and Figure 48 to
Figure 51 ...........................................................................................19
Inserted Figure 52 and Table 4.......................................................20
Changes to Ordering Guide...........................................................21
3/05—Rev. F to Rev. G
U
pdated Format.................................................................. Universal
Change to Features............................................................................1
Changes to General Description .....................................................1
Change to Figure 1 ............................................................................1
Changes to Specifications.................................................................3
New Figure 4 and Renumbering Subsequent Figures...................6
Change to Figure 10 ..........................................................................7
Change to Figure 23 ..........................................................................9
Change to Figure 29 ........................................................................12
Updated Outline Dimensions........................................................20
Programming the Fixed-Gain Amplifier Using
Pin Strapping............................................................................... 12
Using the AD603 in Cascade........................................................ 14
Sequential Mode (Optimal SNR)............................................. 14
Parallel Mode (Simplest Gain Control Interface) .................. 16
Low Gain Ripple Mode (Minimum Gain Error) ................... 16
Applications Information.............................................................. 17
A Low Noise AGC Amplifier.................................................... 17
Caution........................................................................................ 18
Evaluation Board ............................................................................ 19
Outline Dimensions .......................................................................21
Ordering Guide .......................................................................... 21
4/04—Rev. E to Rev. F
hanges to Specifications.................................................................2
C
Changes to Ordering Guide............................................................. 3
8/03—Rev. D to Rev E
pdated Format.................................................................. Universal
U
Changes to Specifications.................................................................2
Changes to TPCs 2, 3, 4....................................................................4
Changes to Sequential Mode (Optimal S/N Ratio) section.........9
Change to Figure 8..........................................................................10
Updated Outline Dimensions........................................................14
Rev. H | Page 2 of 24
AD603
www.BDTIC.com/ADI
SPECIFICATIONS
@ TA = 25°C, VS = ±5 V, –500 mV ≤ VG ≤ +500 mV, GNEG = 0 V, –10 dB to +30 dB gain range, RL = 500 Ω, and CL = 5 pF, unless
otherwise noted.
Table 1.
Parameter Conditions Min Typ Max Unit
INPUT CHARACTERISTICS
Input Resistance Pin 3 to Pin 4 97 100 103 Ω
Input Capacitance 2 pF
Input Noise Spectral Density
Noise Figure f = 10 MHz, gain = maximum, RS = 10 Ω 8.8 dB
1 dB Compression Point f = 10 MHz, gain = maximum, RS = 10 Ω −11 dBm
Peak Input Voltage ±1.4 ±2 V
OUTPUT CHARACTERISTICS
−3 dB Bandwidth V
Slew Rate RL ≥ 500 Ω 275 V/μs
Peak Output
2
Output Impedance f ≤ 10 MHz 2 Ω
Output Short-Circuit Current 50 mA
Group Delay Change vs. Gain f = 3 MHz; full gain range ±2 ns
Group Delay Change vs. Frequency VG = 0 V; f = 1 MHz to 10 MHz ±2 ns
Differential Gain 0.2 %
Differential Phase 0.2 Degree
Total Harmonic Distortion f = 10 MHz, V
Third-Order Intercept f = 40 MHz, gain = maximum, RS = 50 Ω 15 dBm
ACCURACY
Gain Accuracy, f = 100 kHz; Gain (dB) = (40 VG + 10) dB −500 mV ≤ VG ≤ +500 mV −1 ±0.5 +1 dB
T
to T
MIN
MAX
Gain, f = 10.7 MHz VG = -0.5 V −10.3 −9.0 −8.0 dB
V
V
Output Offset Voltage
T
to T
MIN
MAX
Output Offset Variation vs. V
T
to T
MIN
MAX
GAIN CONTROL INTERFACE
Gain Scaling Factor 100 kHz 39.4 40 40.6 dB/V
T
to T
MIN
MAX
10.7 MHz 38.7 39.3 39.9 dB/V
GNEG, GPOS Voltage Range
Input Bias Current 200 nA
Input Offset Current 10 nA
Differential Input Resistance Pin 1 to Pin 2 50 MΩ
Response Rate Full 40 dB gain change 80 dB/μs
POWER SUPPLY
Specified Operating Range ±4.75 ±6.3 V
Quiescent Current 12.5 17 mA
T
to T
MIN
1
Typical open or short-circuited input; noise is lower when system is set to maximum gain and input is short-circuited. This figure includes the effects of both voltage
and current noise sources.
2
Using resistive loads of 500 Ω or greater or with the addition of a 1 kΩ pull-down resistor when driving lower loads.
3
The dc gain of the main amplifier in the AD603 is ×35.7; therefore, an input offset of 100 μV becomes a 3.57 mV output offset.
4
GNEG and GPOS, gain control, and voltage range are guaranteed to be within the range of −VS + 4.2 V to +VS − 3.4 V over the full temperature range of −40°C to +85°C.
MAX
1
Input short-circuited 1.3 nV/√Hz
= 100 mV rms 90 MHz
OUT
RL ≥ 500 Ω ±2.5 ±3.0 V
= 1 V rms −60 dBc
OUT
−1.5 +1.5 dB
= 0.0 V +9.5 +10.5 +11.5 dB
G
= 0.5 V +29.3 +30.3 +31.3 dB
3
G
VG = 0 V −20 +20 mV
−30 +30 mV
G
−500 mV ≤ VG ≤ +500 mV −20 +20 mV
−30 +30 mV
38 42 dB/V
4
−1.2 +2.0 V
20 mA
Rev. H | Page 3 of 24
AD603
www.BDTIC.com/ADI
ABSOLUTE MAXIMUM RATINGS
Table 2.
Parameter Rating
Supply Voltage ±V
Internal Voltage VINP (Pin 3) ±2 V Continuous
±VS for 10 ms
GPOS, GNEG (Pin 1 and Pin2) ±V
Internal Power Dissipation 400 mW
Operating Temperature Range
AD603A −40°C to +85°C
AD603S −55°C to +125°C
Storage Temperature Range −65°C to +150°C
Lead Temperature (Soldering, 60 sec) 300°C
Stresses above those listed under Absolute Maximum Ratings
may cause permanent damage to the device. This is a stress
rating only; functional operation of the device at these or any
other conditions above those indicated in the operational
section of this specification is not implied. Exposure to absolute
maximum rating conditions for extended periods may affect
device reliability.
S
±7.5 V
S
Table 3. Thermal Characteristics
Package Type θ
8-Lead SOIC 155 33 °C/W
8-Lead CERDIP 140 15 °C/W
JA
θ
JC
Unit
ESD CAUTION
Rev. H | Page 4 of 24
AD603
www.BDTIC.com/ADI
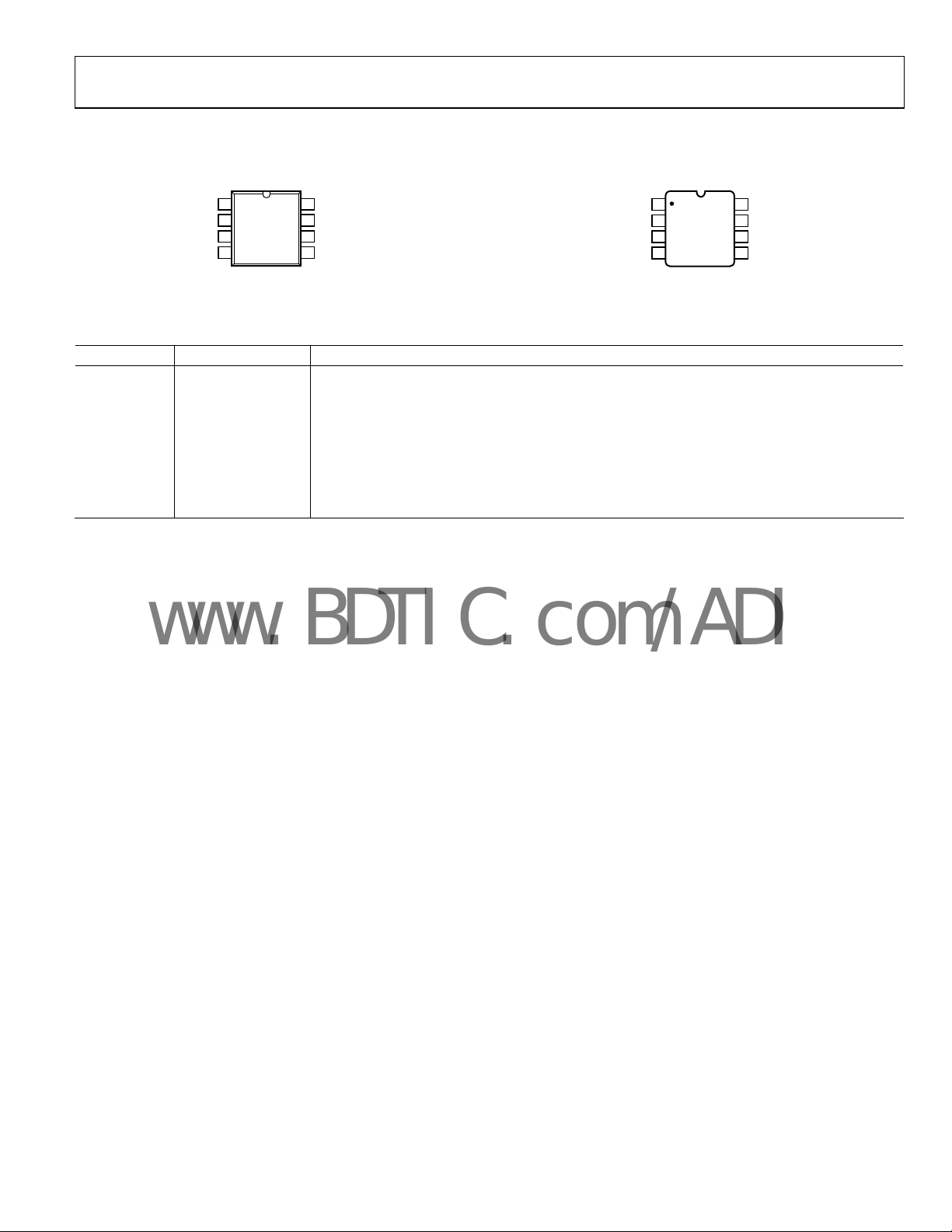
PIN CONFIGURATIONS AND FUNCTION DESCRIPTIONS
1
GPOS
GNEG
VINP
COMM
AD603
2
3
TOP VIEW
(Not to Scale)
4
Figure 2. 8-Lead SOIC Pin Configuration
8
7
6
5
VPOS
VOUT
VNEG
FDBK
GPOS
GNEG
VINP
00539-002
COMM
Figure 3. 8-Lead CERDIP Pin Configuration
Table 4. Pin Function Descriptions
Pin No. Mnemonic Description
1 GPOS Gain Control Input High (Positive Voltage Increases Gain).
2 GNEG Gain Control Input Low (Negative Voltage Increases Gain).
3 VINP
4 COMM
5 FDBK
6 VNEG
7 VOUT
Amplifier Input.
Amplifier Ground.
Connection to Feedback Network.
Negative Supply Input.
Amplifier Output.
8 VPOS Positive Supply Input.
1
AD603
2
TOP VIEW
3
(Not to Scale)
4
8
7
6
5
VPOS
VOUT
VNEG
FDBK
00539-003
Rev. H | Page 5 of 24
AD603
L
A
www.BDTIC.com/ADI
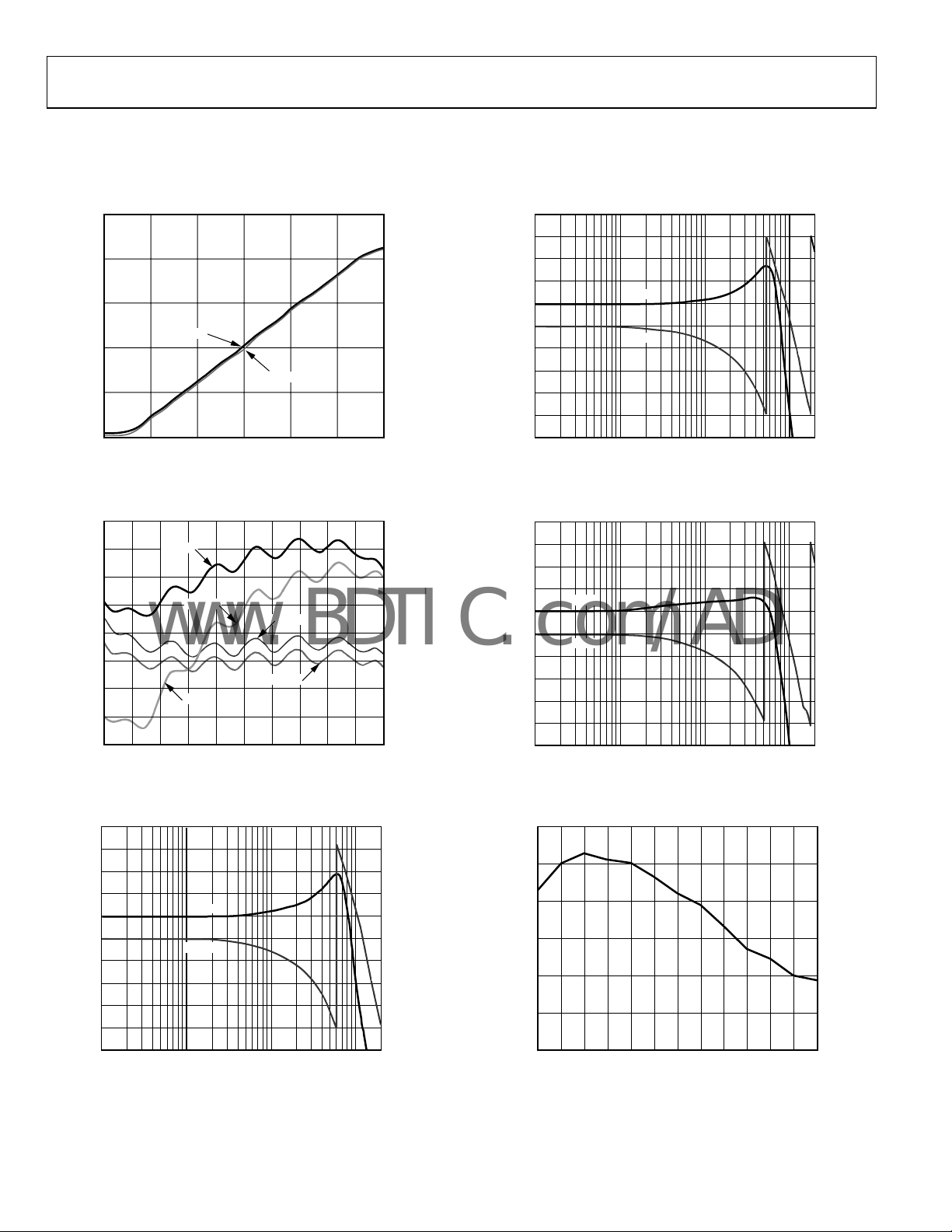
TYPICAL PERFORMANCE CHARACTERISTICS
@ TA = 25°C, VS = ±5 V, –500 mV ≤ VG ≤ +500 mV, GNEG = 0 V, –10 dB to +30 dB gain range, RL = 500 Ω, and CL = 5 pF, unless
otherwise noted.
40
30
20
10
GAIN (dB)
0
–10
10.7MHz
Figure 4. Gain vs. V
100kHz
VG (V)
at 100 kHz and 10.7 MHz
G
2.5
2.0
1.5
1.0
0.5
0
GAIN ERROR (d B)
–0.5
–1.0
–1.5
45MHz
70MHz
10.7MHz
455kHz
70MHz
GAIN VOLTAGE (V)
Figure 5. Gain Error vs. Gain Control Voltage at 455 kHz,
10.
7 MHz, 45 MHz, 70 MHz
4
3
2
1
0
–1
–2
GAIN (dB)
–3
–4
–5
–6
100k 1M 10M 100M
GAIN
PHASE
FREQUENCY ( Hz)
Figure 6. Frequency and Phase Response vs. Gain
(Gain
= −10 dB, P
= −30 dBm)
IN
0.6–0.6 –0.4 –0.2 0 0.2 0.4
0.5–0.5 –0.4 –0.3 –0.2 –0.1 0 0.1 0.2 0.3 0.4
225
180
135
90
45
0
–45
–90
–135
–180
–225
00539-004
00539-005
PHASE (Degrees)
00539-006
4
3
2
1
0
–1
–2
GAIN (dB)
–3
–4
–5
–6
100k 1M 10M 100M
GAIN
PHASE
FREQUENCY ( Hz)
Figure 7. Frequency and Phase Response vs. Gain
n = 10 dB, P
(Gai
4
3
2
1
0
–1
–2
GAIN (dB)
–3
–4
–5
–6
100k 1M 10M 100M
GAIN
PHASE
FREQUENCY ( Hz)
= −30 dBm)
IN
Figure 8. Frequency and Phase Response vs. Gain
(Gai
n = 30 dB, P
7.6
7.4
7.2
Y (ns)
7.0
6.8
GROUP DE
6.6
6.4
GAIN CONTRO L VOLTAGE (V)
= −30 dBm)
IN
Figure 9. Group Delay vs. Gain Control Voltage
0.6–0.6 –0.4 –0.2 0 0.2 0.4
225
180
135
90
45
0
–45
–90
–135
–180
–225
225
180
135
90
45
0
–45
–90
–135
–180
–225
PHASE (Degrees)
00539-007
PHASE (Degrees)
00539-008
00539-009
Rev. H | Page 6 of 24
AD603
G
A
–
(
(
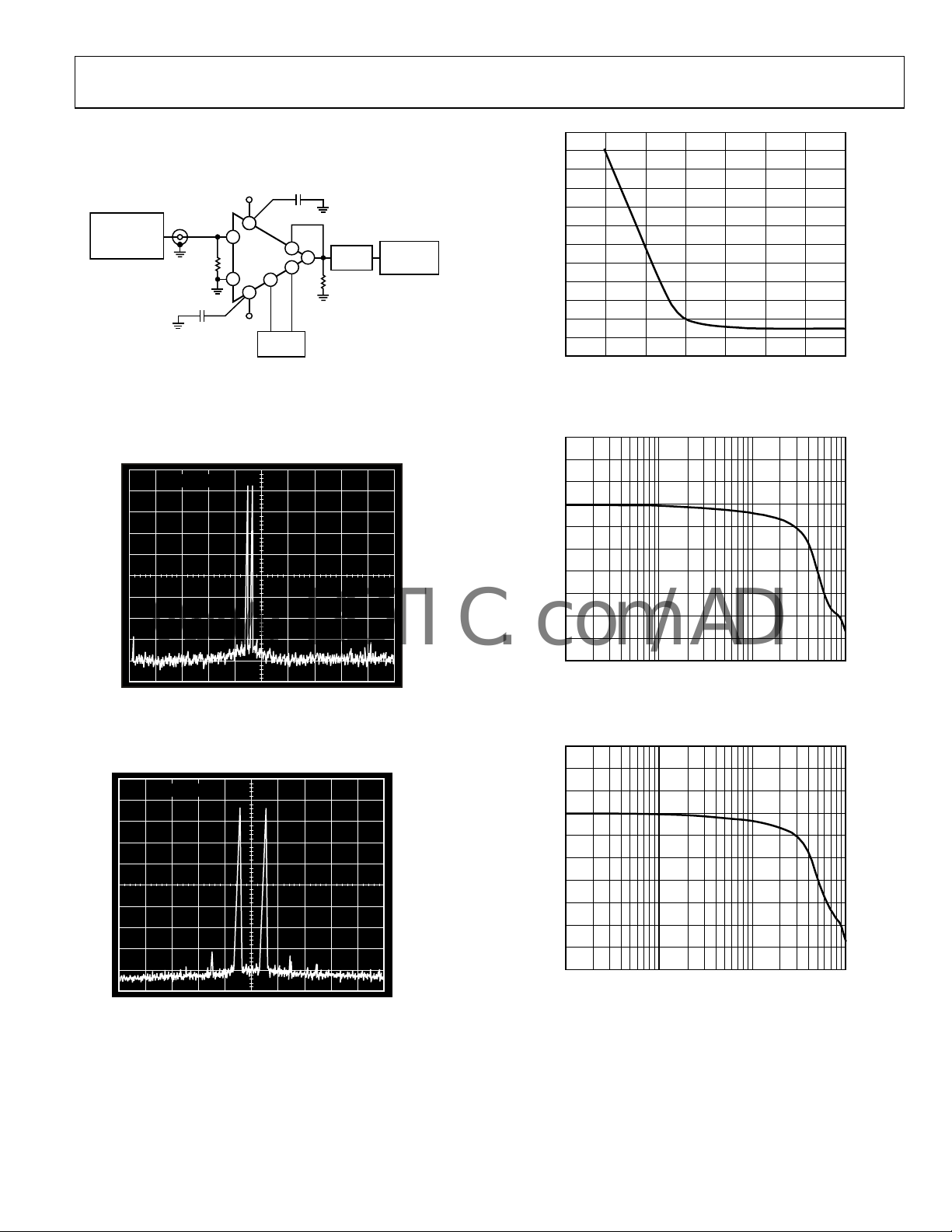
www.BDTIC.com/ADI
0.1µF
+5V
HP3326A
DUAL-
CHANNEL
SYNTHESIZER
100Ω
0.1µF
3
AD603
4
–5V
8
6
DVC 8500
1
DATEL
5
2
10×
7
PROBE
511Ω
Figure 10. Third-Order Intermodulation Distortion Test Setup
10dB/DIV
HP3585A
SPECTRUM
ANALYZER
00539-010
1.0
–1.2
–1.4
–1.6
–1.8
–2.0
–2.2
–2.4
–2.6
TIVE OUTPUT VOLTAGE (V)
–2.8
–3.0
NE
–3.2
–3.4
0 50 100 200 500 1000 2000
LOAD RESISTANCE (Ω)
Figure 13. Typical Output Voltage Swing vs. Load Resistance
(Nega
tive Output Swing Limits First)
102
100
Ω)
00539-013
Figure 11. Third-Order Intermodulation Distortion at 455 kHz
0× Probe Used to HP3585A Spectrum Analyzer, Gain = 0 dB, P
(1
10dB/DIV
Figure 12. Third-Order Intermodulation Distortion at 10.7 MHz
(1
0× Probe Used to HP3585A Spectrum Analyzer, Gain = 0 dB, P
00539-011
= 0 dBm)
IN
00539-012
= 0 dBm)
IN
98
96
INPUT IMP EDANCE
94
FREQUENCY (Hz)
100M100k 1M 10M
00539-014
Figure 14. Input Impedance vs. Frequency (Gain = −10 dB)
102
100
Ω)
98
96
INPUT IMP EDANCE
94
FREQUENCY (Hz)
100M100k 1M 10M
00539-015
Figure 15. Input Impedance vs. Frequency (Gain = 10 dB)
Rev. H | Page 7 of 24
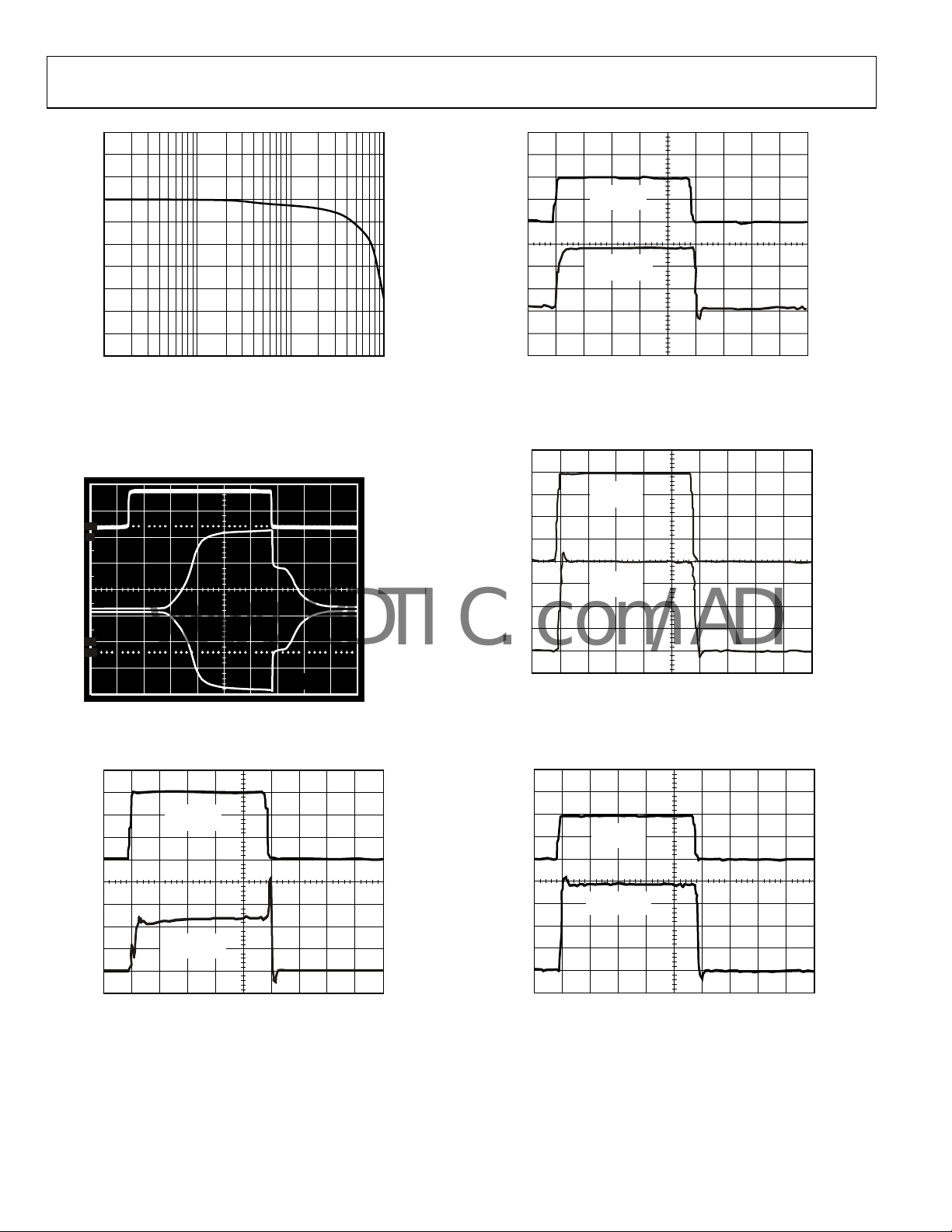
AD603
(
V
V
V
V
V
V
www.BDTIC.com/ADI
3
102
100
Ω)
98
96
INPUT IMP EDANCE
94
FREQUENCY (Hz)
Figure 16. Input Impedance vs. Frequency (Gain = 30 dB)
1V
100
90
10
0%
1V
200ns
Figure 17. Gain Control Channel Response Time
4.5
INPUT GND
100MV/DIV
1V
OUTPUT GND
1V/DIV
100M100k 1M 10M
00539-016
–2V
Figure 19. Output Stage Ove
rload Recovery Time
451ns–49ns 50ns
00539-019
(Input Is 500 ns Period, 50% Duty-Cycle Square Wave,
Output Is Captured Using Tektronix 11402 Digitizing Oscilloscope)
3.5
INPUT
500mV/DIV
GND
500m
OUTPUT
500mV/DIV
–1.5V
00539-017
GND
456ns–44ns 50ns
00539-020
Figure 20. Transient Response, G = 0 dB
(Input
Is 500 ns Period, 50% Duty-Cycle Square Wave,
Output Is Captured Using Tektronix 11402 Digitizing Oscilloscope)
3.5
INPUT GND
1V/DIV
500mV
–500mV
OUTPUT GND
500mV/DIV
451ns–49ns 50ns
00539-018
500m
–1.5V
Figure 18. Input Stage Overload Recovery Time
Is 500 ns Period, 50% Duty-Cycle Square Wave,
(Input
Output Is Captured Using Tektronix 11402 Digitizing Oscilloscope)
Output Is Captured Using Tektronix 11402 Digitizing Oscilloscope)
INPUT GND
100mV/DIV
OUTPUT GND
500mV/DIV
Figure 21. Transient Response, G = 20 dB
Is 500 ns Period, 50% Duty-Cycle Square Wave,
(Input
Rev. H | Page 8 of 24
456ns–44ns 50ns
00539-021

AD603
www.BDTIC.com/ADI
21
0
–10
–20
–30
–40
–50
PSRR (dB)
–60
19
17
15
13
11
NOISE FI GURE (dB)
9
7
10MHz
20MHz
TA = 25°C
R
= 50Ω
S
TEST SETUP FIGURE 23
FREQUENCY (Hz)
100M100k 1M 1 0M
Figure 22. PSRR vs. Frequency
(Wors
t Case Is Negative Supply PSRR, Shown Here)
0.1µF
+5V
HP3326A
DUAL-
CHANNEL
SYNTHESIZER
100Ω
0.1µF
8
3
AD603
4
6
–5V
5
2
1
DATEL
DVC 8500
7
SPECTRUM
ANALYZER
HP3585A
50Ω
Figure 23. Test Setup Used for: Noise Figure, Third-Order Intercept, and
ompression Point Measurements
1 dB C
23
21
19
17
15
13
11
NOISE FI GURE (dB)
9
7
5
70MHz
30MHz
GAIN (dB)
Figure 24. Noise Figure in −
TA = 25°C
R
= 50V
S
TEST SETUP FIGURE 23
50MHz
10MHz
10 dB/+30 dB Mode
3020 21 22 23 24 25 26 27 28 29
5
00539-022
GAIN (dB)
4030 31 32 33 34 35 36 37 38 39
00539-025
Figure 25. Noise Figure in 0 dB/40 dB Mode
0
–5
–10
–15
INPUT LEVEL (dBm)
–20
–25
00539-023
INPUT FREQUENCY (MHz)
TA = 25°C
TEST SETUP FIGURE 23
7010 30 50
00539-026
Figure 26. 1 dB Compression Point, −10 dB/+30 dB Mode, Gain = 30 dB
20
18
16
14
12
OUTPUT LEVEL (dBm)
10
0
00539-024
30MHz
40MHz
70MHz
INPUT LEVEL (dBm)
Figure 27. Third-Order Intercept −10 d
TA = 25°C
TEST SETUP FIGURE 23
0–20 –10
B/+30 dB Mode, Gain = 10 dB
00539-027
Rev. H | Page 9 of 24

AD603
www.BDTIC.com/ADI
20
18
30MHz
16
40MHz
14
12
OUTPUT LEVEL (dBm)
10
70MHz
TA = 25°C
R
= 50Ω
S
R
= 50Ω
IN
R
= 100Ω
L
TEST SETUP FIGURE 23
8
INPUT LEVEL (dBm)
Figure 28. Third-Order Intercept −10 d
–20–40 –30
B/+30 dB Mode, Gain = 30 dB
00539-028
Rev. H | Page 10 of 24

AD603
www.BDTIC.com/ADI
THEORY OF OPERATION
The AD603 comprises a fixed-gain amplifier, preceded by a
broadband passive attenuator of 0 dB to 42.14 dB, having a gain
control scaling factor of 40 dB per volt. The fixed gain is lasertrimmed in two ranges, to either 31.07 dB (×35.8) or 50 dB
(×358), or it may be set to any range in between using one
external resistor between Pin 5 and Pin 7. Somewhat higher
gain can be obtained by connecting the resistor from Pin 5 to
common, but the increase in output offset voltage limits the
maximum gain to about 60 dB. For any given range, the
bandwidth is independent of the voltage-controlled gain. This
system provides an underrange and overrange of 1.07 dB in all
cases; for example, the overall gain is −11.07 dB to +31.07 dB in
the maximum bandwidth mode (Pin 5 and Pin 7 strapped).
This X-AMP structure has many advantages over former
m
ethods of gain control based on nonlinear elements. Most
importantly, the fixed-gain amplifier can use negative feedback
to increase its accuracy. Because large inputs are first attenuated,
the amplifier input is always small. For example, to deliver a
±1 V output in the −1 dB/+41 dB mode (that is, using a fixed
amplifier gain of 41.07 dB), its input is only 8.84 mV; therefore,
the distortion can be very low. Equally important, the smallsignal gain and phase response, and thus the pulse response, are
essentially independent of gain.
Figure 29 is a simplified schematic. The input attenuator is a
7-s
ection R-2R ladder network, using untrimmed resistors of
nominally R = 62.5 Ω, which results in a characteristic resistance of
125 Ω ± 20%. A shunt resistor is included at the input and laser
trimmed to establish a more exact input resistance of 100 Ω ± 3%,
which ensures accurate operation (gain and HP corner frequency)
when used in conjunction with external resistors or capacitors.
The nominal maximum signal at input VINP is 1 V rms
(±1.4 V p
although operation to ±2 V peak is permissible with some
increase in HF distortion and feedthrough. Pin 4 (COMM)
must be connected directly to the input ground; significant
impedance in this connection reduces the gain accuracy.
The signal applied at the input of the ladder network is attenuated
b
y 6.02 dB by each section; therefore, the attenuation to each of
the taps is progressively 0 dB, 6.02 dB, 12.04 dB, 18.06 dB,
24.08 dB, 30.1 dB, 36.12 dB, and 42.14 dB. A unique circuit
technique is employed to interpolate between these tap points,
indicated by the slider in
ttenuation from 0 dB to 42.14 dB. It helps in understanding the
a
AD603 to think in terms of a mechanical means for moving this
slider from left to right; in fact, its position is controlled by the
voltage between Pin 1 and Pin 2. The details of the gain control
interface are in the
eak) when using the recommended ±5 V supplies,
Figure 29, thus providing continuous
The Gain Control Interface section.
The gain is at all times very exactly determined, and a linear-ind
B relationship is automatically guaranteed by the exponential
nature of the attenuation in the ladder network (the X-AMP
principle). In practice, the gain deviates slightly from the ideal
law, by about ±0.2 dB peak (see, for example,
Figure 5).
NOISE PERFORMANCE
An important advantage of the X-AMP is its superior noise
performance. The nominal resistance seen at inner tap points is
41.7 Ω (one third of 125 Ω), which exhibits a Johnson noise
spectral density (NSD) of 0.83 nV/√Hz (that is, √4kTR) at 27°C,
which is a large fraction of the total input noise. The first stage
of the amplifier contributes a further 1 nV/√Hz, for a total input
noise of 1.3 nV/√Hz. It is apparent that it is essential to use a
low resistance in the ladder network to achieve the very low
specified noise level. The source impedance of the signal
forms a voltage divider with the 100 Ω input resistance of the
AD603. In some applications, the resulting attenuation may
be unacceptable, requiring the use of an external buffer or
preamplifier to match a high impedance source to the low
impedance AD603.
The noise at maximum gain (that is, at the 0 dB tap) depends on
w
hether the input is short-circuited or open-circuited. When
short-circuited, the minimum NSD of slightly over 1 nV/√Hz is
achieved. When open-circuited, the resistance of 100 Ω looking
into the first tap generates 1.29 nV/√Hz, so the noise increases
to 1.63 nV/√Hz. (This last calculation would be important if the
AD603 were preceded by, for example, a 900 Ω resistor to allow
operation from inputs up to 10 V rms.) As the selected tap
moves away from the input, the dependence of the noise on
source impedance quickly diminishes.
Apart from the small variations just discussed, the signal-ton
oise (SNR) at the output is essentially independent of the
attenuator setting. For example, on the −11 dB/+31 dB range,
the fixed gain of ×35.8 raises the output NSD to 46.5 nV/√Hz.
Therefore, for the maximum undistorted output of 1 V rms and
a 1 MHz bandwidth, the output SNR would be 86.6 dB, that is,
20 log(1 V/46.5 μV).
Rev. H | Page 11 of 24

AD603
www.BDTIC.com/ADI
8
VPOS
VNEG
GPOS
GNEG
VINP
COMM
6
1
2
3
4
SCALING
REFERENCE
V
G
GAIN-
CONTROL
INTERFACE
0dB –6.02dB –12.04dB –18.06dB –24.08dB –30.1dB –36.12dB –42.14dB
RRRRRRR
2R 2R 2R 2R 2R 2R R
R-2R LADDER NETWO RK
PRECISION PASSIVE
INPUT ATTENUATOR
AD603
FIXED-GAIN
AMPLIFIER
6.44kΩ*
694Ω*
20Ω*
7
5
VOUT
FDBK
*NOMINAL VALUES.
Figure 29. Simplified Block Diagram
THE GAIN CONTROL INTERFACE
The attenuation is controlled through a differential, high
impedance (50 MΩ) input, with a scaling factor that is lasertrimmed to 40 dB per volt, that is, 25 mV/dB. An internal band
gap reference ensures stability of the scaling with respect to
supply and temperature variations.
When the differential input voltage V
slider is centered, providing an attenuation of 21.07 dB. For the
maximum bandwidth range, this results in an overall gain of
10 dB (= −21.07 dB + 31.07 dB). When the control input is
−500 mV, the gain is lowered by +20 dB (= 0.500 V × 40 dB/V)
to −10 dB; when set to +500 mV, the gain is increased by
+20 dB to +30 dB. When this interface is overdriven in either
direction, the gain approaches either −11.07 dB (= − 42.14 dB +
+31.07 dB) or 31.07 dB (= 0 + 31.07 dB), respectively. The only
constraint on the gain control voltage is that it be kept within
the common-mode range (−1.2 V to +2.0 V assuming +5 V
supplies) of the gain control interface.
The basic gain of the AD603 can therefore be calculated by
Gain (dB) = 40 V
where V
is in volts. When Pin 5 and Pin 7 are strapped (see the
G
+10 (1)
G
Programming the Fixed-Gain Amplifier Using Pin Strapping
on), the gain becomes
secti
Gain (dB) = 40 V
+ 20 for 0 to +40 dB
G
and
Gain (dB) = 40 V
+ 30 for +10 to +50 dB (2)
G
The high impedance gain control input ensures minimal
lo
ading when driving many amplifiers in multiple channel
or cascaded applications. The differential capability provides
flexibility in choosing the appropriate signal levels and
polarities for various control schemes.
= 0 V, the attenuator
G
00539-029
For example, if the gain is to be controlled by a DAC providing
a p
ositive-only, ground-referenced output, the gain control low
(GNEG) pin should be biased to a fixed offset of 500 mV to set
the gain to −10 dB when gain control high (GPOS) is at zero,
and to 30 dB when at 1.00 V.
It is a simple matter to include a voltage divider to achieve other
caling factors. When using an 8-bit DAC having an FS output
s
of 2.55 V (10 mV/bit), a divider ratio of 2 (generating 5 mV/bit)
results in a gain-setting resolution of 0.2 dB/bit. The use of such
offsets is valuable when two AD603s are cascaded, when
various options exist for optimizing the signal-to-noise profile,
as is shown in the
Sequential Mode (Optimal SNR) section,
PROGRAMMING THE FIXED-GAIN AMPLIFIER
USING PIN STRAPPING
Access to the feedback network is provided at Pin 5 (FDBK).
The user may program the gain of the output amplifier of the
AD603 using this pin, as shown in Figure 30, Figure 31, and
Figure 32. There are three modes: in the default mode, FDBK
is un
connected, providing the range +9 dB/+51 dB; when V
and FDBK are shorted, the gain is lowered to −11 dB/+31 dB;
and, when an external resistor is placed between V
OUT
FDBK, any intermediate gain can be achieved, for example,
−1 dB/+41 dB.
ernal resistor for this mode.
ext
VIN
Figure 33 shows the nominal maximum gain vs.
1
2
3
4
GPOS
AD603
GNEG
VINP
COMM
VC1
VC2
Figure 30. −10 dB to +30 dB; 90 MHz Bandwidth
VPOS
VOUT
VNEG
FDBK
8
VPOS
7
6
VNEG
5
and
VOUT
OUT
00539-030
Rev. H | Page 12 of 24

AD603
V
www.BDTIC.com/ADI
Optionally, when a resistor is placed from FDBK to COMM,
higher gains can be achieved. This fourth mode is of limited
value because of the low bandwidth and the elevated output
offsets; it is thus not included in
Figure 30, Figure 31, or
Figure 32.
The gain of this amplifier in the first two modes is set by the
ra
tio of on-chip laser-trimmed resistors. While the ratio of these
resistors is very accurate, the absolute value of these resistors
can vary by as much as ±20%. Therefore, when an external
resistor is connected in parallel with the nominal 6.44 kΩ ± 20%
internal resistor, the overall gain accuracy is somewhat poorer.
The worst-case error occurs at about 2 kΩ (see
1.2
1.0
0.8
0.6
0.4
0.2
0
–0.2
GAIN ERROR (d B)
–0.4
–0.6
–0.8
–1.0
Figure 34. Worst-Case Gain Error, Assuming Internal Resistors Have a
mum Tolerance of −20% (Top Curve) or = 20% (Bottom Curve)
Maxi
–1:VdB (OUT) – (–1):VdB (O
VdB (OUT) – VdB (O
R
(Ω)
EXT
Figure 34).
REF
REF
)
)
1M10 100 1k 10k 100k
00539-034
While the gain bandwidth product of the fixed-gain amplifier is
about 4 GHz, the actual bandwidth is not exactly related to the
maximum gain. This is because there is a slight enhancing of
the ac response magnitude on the maximum bandwidth range,
due to higher order poles in the open-loop gain function; this
mild peaking is not present on the higher gain ranges.
Figure 30,
Figure 31, and Figure 32 show how an optional capacitor may
b
e added to extend the frequency response in high gain modes.
IN
VIN
52
50
48
46
44
42
40
GAIN (dB)
38
36
34
32
30
Figure 33. Gain vs. R
VC1
1
GPOS
VPOS
8
VPOS
AD603
VC2
2
3
4
GNEG
VINP
COMM
VOUT
VNEG
FDBK
7
6
VNEG
2.15kΩ
5
5.6pF
Figure 31. 0 dB to 40 dB; 30 MHz Bandwidth
VC1
1
GPOS
VPOS
8
VPOS
AD603
VC2
2
GNEG
3
VINP
4 5
COMM
VOUT
VNEG
FDBK
7
6
VNEG
18pF
Figure 32. 10 dB to 50 dB; 9 MHz to Set Gain
–1:VdB (OUT)
VdB (OUT)
–2:VdB (OUT)
R
(Ω)
EXT
, Showing Worst-Case Limits Assuming Internal
EXT
Resistors Have a Maximum Tolerance of 20%
VOUT
VOUT
1M10 100 1k 10k 100k
00539-031
00539-032
00539-033
Rev. H | Page 13 of 24

AD603
–
V
–
V
www.BDTIC.com/ADI
USING THE AD603 IN CASCADE
Two or more AD603s can be connected in series to achieve
higher gain. Invariably, ac coupling must be used to prevent the
dc offset voltage at the output of each amplifier from overloading
the following amplifier at maximum gain. The required highpass coupling network is usually just a capacitor, chosen to set
the desired corner frequency in conjunction with the welldefined 100 Ω input resistance of the following amplifier.
For two AD603s, the total gain control range becomes 84 dB
(2 × 42.14 dB); th
e overall −3 dB bandwidth of cascaded stages
is somewhat reduced. Depending on the pin strapping, the gain
and bandwidth for two cascaded amplifiers can range from
−22 dB to +62 dB (with a bandwidth of about 70 MHz) to
+22 dB to +102 dB (with a bandwidth of about 6 MHz).
There are several ways of connecting the gain control inputs
i
n cascaded operation. The choice depends on whether it is
important to achieve the highest possible instantaneous signalto-noise ratio (ISNR), or, alternatively, to minimize the ripple
in the gain error. The following examples feature the AD603
programmed for maximum bandwidth; the explanations apply
to other gain/bandwidth combinations with appropriate
changes to the arrangements for setting the maximum gain.
SEQUENTIAL MODE (OPTIMAL SNR)
In the sequential mode of operation, the ISNR is maintained at
its highest level for as much of the gain control range as possible.
A1
–40.00dB –51.07dB
Figure 35 shows the SNR over a gain range of −22 dB to +62 dB,
assumin
g an output of 1 V rms and a 1 MHz bandwidth. Figure 36,
Figure 37, and Figure 38 show the general connections to
a
ccomplish this. Here, both the positive gain control inputs
(GPOS) are driven in parallel by a positive-only, ground-referenced
source with a range of 0 V to 2 V, while the negative gain
control inputs (GNEG) are biased by stable voltages to provide
the needed gain offsets. These voltages may be provided by
resistive dividers operating from a common voltage reference.
90
85
80
75
70
SNR (dB)
65
60
55
50
VC (V)
Figure 35. SNR vs. Control Voltage, Seq
A2
uential Control (1 MHz Bandwidth)
2.2–0.2 0.60.2 1.41.0 1.8
00539-035
INPUT
0dB
V
C
= 0V
–42.14dB
GPOS GNEG
V
G1
VO1 = 0.473V VO2 = 1.526V
31.07dB
Figure 36. AD603 Gain Control Input Calculat
–8.93dB
–42.14dB
GPOS GNEG
V
G2
31.07dB
ions for Sequential Control Operation V
OUTPUT
–20dB
= 0 V
C
00539-036
0dB
INPUT
0dB
= 1.0V
C
0dB
GPOS GNEG
V
G1
VO1 = 0.473V VO2 = 1.526V
31.07dB
31.07dB
GPOS GNEG
Figure 37. AD603 Gain Control Calculations for Sequential Control Operation V
0dB
INPUT
0dB
= 2.0V
C
0dB
GPOS GNEG
V
G1
VO1 = 0.473V VO2 = 1.526V
31.07dB
31.07dB
GPOS GNEG
Figure 38. AD603 Gain Control Input Calculations for Sequential Operation V
–42.14dB
V
G2
–2.14dB
V
G2
11.07dB
28.93dB
31.07dB
31.07dB
OUTPUT
20dB
= 1.0 V
C
OUTPUT
60dB
= 2.0 V
C
00539-037
00539-038
Rev. H | Page 14 of 24

AD603
m
www.BDTIC.com/ADI
The gains are offset (Figure 39) such that the gain of A2 is
increased only after the gain of A1 has reached its maximum
value. Note that for a differential input of –600 mV or less, the
gain of a single amplifier (A1 or A2) is at its minimum value of
−11.07 dB; for a differential input of 600 mV or more, the gain
is at its maximum value of 31.07 dB. Control inputs beyond
these limits do not affect the gain and can be tolerated without
damage or foldover in the response. This is an important aspect
of the gain control response of the AD603. (See the
ection for more details on the allowable voltage range.) The
s
Specifications
gain is now
Gain (dB) = 40 V
+ GO (3)
G
where:
V
is the applied control voltage.
G
G
is determined by the gain range chosen.
O
In the explanatory notes that follow, it is assumed that
he maximum bandwidth connections are used, for which
t
G
is −20 dB.
O
+31.07dB
+10dB
–8.93dB
GAIN
–22.14
(dB)
*GAIN OF FSET O F 1.07dB, OR 26.75
A1 A2
–11.07dB
0.473 1.52 6
–20
0
0.5
0
+31.07dB +28.96dB
*
*
1.0
20
V.
1.50
40
–11.07dB
2.060V
(V)
C
62.14
Figure 39. Explanation of Offset Calibration for Sequential Control
With reference to Figure 36, Figure 37, and Figure 38, note that
V
refers to the differential gain control input to A1, and VG2
G1
refers to the differential gain control input to A2. When V
0 V, V
= −473 mV and thus the gain of A1 is −8.93 dB (recall
G1
is
G
that the gain of each individual amplifier in the maximum
bandwidth mode is –10 dB for V
= 0 V); meanwhile, V
= −1.908 V so the gain of A2 is pinned
G2
= −500 mV and 10 dB for VG
G
at −11.07 dB. The overall gain is therefore –20 dB (see Figure 36).
When V
= 1.00 V, VG1 = 1.00 V − 0.473 V = 0.526 V, which sets
G
the gain of A1 to nearly its maximum value of +31.07 dB, while
V
= 1.00 V − 1.526 V = 0.526 V, which sets the gain of A2 to
G2
nearly its minimum value of −11.07 dB. Close analysis shows
that the degree to which neither AD603 is completely pushed to
its maximum nor minimum gain exactly cancels in the overall
gain, which is now 20 dB (see
When V
= 2.0 V, the gain of A1 is pinned at 31.07 dB and that
G
Figure 37).
of A2 is near its maximum value of 28.93 dB, resulting in an
overall gain of 60 dB (see
urther clarified in Figure 40, which is a plot of the separate
f
ins of A1 and A2 and the overall gain vs. the control voltage.
ga
Figure 38). This mode of operation is
00539-039
Figure 41 is a plot of the SNR of the cascaded amplifiers vs. the
ontrol voltage. Figure 42 is a plot of the gain error of the
c
cas
caded stages vs. the control voltages.
70
60
50
40
30
20
10
0
OVERALL GAIN (dB)
–10
–20
–30
A1
VC (V)
COMBINED
A2
2.0–0.2 0.2 0.6 1. 0 1. 4 1 .8
00539-040
Figure 40. Plot of Separate and Overall Gains in Sequential Control
90
80
70
60
50
SNR (dB)
40
30
20
10
Figure 41. SNR for Cascaded St
2.0
1.5
1.0
0.5
0
–0.5
GAIN ERROR (d B)
–1.0
–1.5
–2.0
VC (V)
ages—Sequential Control
VC (V)
2.0–0.2 0.2 0.6 1. 0 1. 4 1 .8
00539-041
2.2–0.2 0 0.2 0.4 0.6 0.8 1.0 1. 2 1.4 1.6 1.8 2. 0
00539-042
Figure 42. Gain Error for Cascaded Stages–Sequential Control
Rev. H | Page 15 of 24

AD603
www.BDTIC.com/ADI
PARALLEL MODE (SIMPLEST GAIN CONTROL INTERFACE)
In this mode, the gain control of voltage is applied to both
inputs in parallel: the GPOS pins of both A1 and A2 are
connected to the control voltage and the GNEW inputs are
grounded. The gain scaling is then doubled to 80 dB/V,
requiring only a 1.00 V change for an 80 dB change of gain
Gain = (dB) = 80 V
where, as before, G
in the maximum bandwidth mode, G
the GNEG pins may be connected to an offset voltage of
0.500 V, in which case G
The amplitude of the gain ripple in this case is also doubled, as
n Figure 43, while the ISNR at the output of A2 now
shown i
de
creases linearly as the gain increases, as shown in Figure 44.
2.0
1.5
1.0
0.5
0
–0.5
GAIN ERROR (d B)
–1.0
–1.5
–2.0
Figure 43. Gain Error for Cascaded Stages—Parallel Control
90
85
80
+ GO (4)
G
depends on the range selected; for example,
O
is 20 dB. Alternatively,
O
is −20 dB.
O
VC (V)
2.2–0.2 0 0.2 0.4 0.6 1.0 1.20.8 1.6 1.8 2.01.4
00539-043
LOW GAIN RIPPLE MODE (MINIMUM GAIN ERROR)
As can be seen in Figure 42 and Figure 43, the error in the gain
is periodic, that is, it shows a small ripple. (Note that there is
also a variation in the output offset voltage, which is due to the
gain interpolation, but this is not exact in amplitude.) By
offsetting the gains of A1 and A2 by half the period of the ripple,
that is, by 3 dB, the residual gain errors of the two amplifiers
can be made to cancel.
hen configured in this manner. Figure 46 plots the ISNR as a
w
f
unction of gain; it is very similar to that in the parallel mode.
3.0
2.5
2.0
1.5
1.0
0.5
0
–0.5
–1.0
GAIN ERROR (d B)
–1.5
–2.0
–2.5
–3.0
Figure 45. Gain Error for Cascaded Stages—Low Ripple Mode
90
85
80
75
70
ISNR (dB)
65
60
Figure 45 shows much lower gain ripple
VC (V)
1.1–0.1 0 0.1 0. 2 0.3 0.4 0.5 0. 6 0.7 0.8 0.9 1. 0
00539-045
75
70
ISNR (dB)
65
55
50
Figure 46. ISNR vs. Control Voltage—Low Ripple Mode
60
55
50
VC (V)
1.2–0.2 0 0.2 0.4 0.6 0.8 1. 0
00539-044
Figure 44. ISNR for Cascaded Stages—Parallel Control
Rev. H | Page 16 of 24
VC(V)
1.2–0.2 0 0.2 0.4 0.6 0.8 1. 0
00539-046

AD603
V
www.BDTIC.com/ADI
APPLICATIONS INFORMATION
A LOW NOISE AGC AMPLIFIER
Figure 47 shows the ease with which the AD603 can be
connected as an AGC amplifier. The circuit illustrates many of
the points previously discussed: it uses few parts, has linear-indB gain, operates from a single supply, uses two cascaded amplifiers
in sequential gain mode for maximum SNR, and an external
resistor programs each gain of the amplifier. It also uses a
simple temperature-compensated detector.
The circuit operates from a single 10 V supply. Resistors R1, R2,
R3, a
nd R4 bias the common pins of A1 and A2 at 5 V. The
common pin is a low impedance point and must have a low
impedance path to ground, provided here by the 100 μF tantalum
capacitors and the 0.1 μF ceramic capacitors.
The cascaded amplifiers operate in sequential gain. Here, the
ffset voltage between Pin 2 (GNEG) of A1 and A2 is 1.05 V
o
(42.14 dB × 25 mV/dB), provided by a voltage divider consisting of
Resistors R5, R6, and R7. Using standard values, the offset is not
exact, but it is not critical for this application.
The gain of both A1 and A2 is programmed by Resistors R13
14, respectively, to be about 42 dB; therefore, the maximum
and R
gain of the circuit is twice that, or 84 dB. The gain control range
can be shifted up by as much as 20 dB by appropriate choices of
R13 and R14.
The circuit operates as follows:
nd A2 are cascaded.
• A1 a
pacitor C1 and the 100 Ω of resistance at the input of A1
• Ca
form a time constant of 10 μs.
locks the small dc offset voltage at the output of A1
• C2 b
(which might otherwise saturate A2 at its maximum gain)
and introduces a high-pass corner at about 16 kHz,
eliminating low frequency noise.
A half-wave detector is used, based on Q1 and R8. The current
i
nto capacitor, C
, is the difference between the collector
AV
current of Q2 (biased to be 300 μA at 300 K, 27°C) and the
collector current of Q1, which increases with the amplitude
of the output signal.
The automatic gain control voltage, V
of this error current. For V
(and thus the gain) to remain
AGC
, is the time integral
AGC
insensitive to short-term amplitude fluctuations in the output
signal, the rectified current in Q1 must, on average, exactly
balance the current in Q2. If the output of A2 is too small to
do this, V
increases, causing the gain to increase until Q1
AGC
conducts sufficiently.
Consider the case where R8 is zero and the output voltage V
OUT
is a square wave at, for example, 455 kHz, which is well above
the corner frequency of the control loop.
10
C7
0.1µF
C1
0.1µF
10V
R2
2.49kΩ
5.49kΩ
3
4
J1
2
C3
100µFC40.1µF
1
RT
100Ω
R1
2.49kΩ
+
1
RT PROVIDES A 50Ω INPUT IMPEDANC E.
2
C3 AND C5 ARE TANTALUM.
10V
R13
8
A1
AD603
1
R5
2.49kΩ
6
5
7
2
C5
100µFC60.1µF
5.5V 6.5V
C2
0.1µF
2
+
1V OFFSET FOR
SEQUENTIAL GAIN
R3
2.49kΩ
R6
1.05kΩ
C8
0.1µF
10V
Figure 47. A Low Noise AGC Amplifier
R4
2.49kΩ
THIS CAPACITOR SETS
AGC TI ME CONSTANT
10V
8
6
3
AD603
4
5
A2
2
1
R14
2.49kΩ
7
0.1µF
R7
3.48kΩ
V
AGC
C
AV
AGC LINE
10V
1.54kΩ
2N3906
2N3904
806Ω
Q2
Q1
R9
R8
R10
1.24kΩ
R11
3.83kΩ
5V
R12
4.99kΩ
C10
0.1µF
C11
0.1µF
C9
0.1µF
J2
00539-047
Rev. H | Page 17 of 24

AD603
www.BDTIC.com/ADI
During the time V
voltage of Q1, Q1 conducts; when V
Because the average collector current of Q1 is forced to be
300 μA, and the square wave has a duty cycle of 1:1, Q1’s
collector current when conducting must be 600 μA. With R8
omitted, the peak amplitude of V
of Q1 at 600 μA, typically about 700 mV, or 2 V
This voltage, the amplitude at which the output stabilizes, has a
strong negative temperature coefficient (TC), typically −1.7 mV/°C.
Although this may not be troublesome in some applications, the
correct value of R8 renders the output stable with temperature.
To understand this, note that the current in Q2 is made to be
ortional to absolute temperature (PTAT). For the moment,
prop
continue to assume that the signal is a square wave.
When Q1 is conducting, V
voltage that is PTAT and that can be chosen to have an equal
but opposite TC to that of the V
than an application of the band gap voltage reference principle.
When R8 is chosen such that the sum of the voltage across it
and the V
V
OUT
course, that Q1 and Q2 share the same thermal environment.
Because the average emitter current is 600 μA during each half
c
ycle of the square wave, a resistor of 833 Ω adds a PTAT
voltage of 500 mV at 300 K, increasing by 1.66 mV/°C. In
practice, the optimum value depends on the type of transistor
used and, to a lesser extent, on the waveform for which the
temperature stability is to be optimized; for the inexpensive
2N3904/2N3906 pair and sine wave signals, the recommended
value is 806 Ω.
of Q1 is close to the band gap voltage of about 1.2 V,
BE
is stable over a wide range of temperatures, provided, of
is negative with respect to the base
OUT
is positive, it is cut off.
OUT
is forced to be just the VBE
OUT
BE
is now the sum of VBE and a
OUT
. This is actually nothing more
BE
peak-to-peak.
This resistor also serves to lower the peak current in Q1 when
more
typical signals (usually sinusoidal) are involved, and the
1.8 kHz LP filter it forms with C
due to ripple in V
wave conditions is higher than for a square wave because the
average value of the current for an ideal rectifier is 0.637 times
as large, causing the output amplitude to be 1.88 (= 1.2/0.637) V,
or 1.33 V rms. In practice, the somewhat nonideal rectifier
results in the sine-wave output being regulated to about
1.4 V rms, or 3.6 V p-p.
The bandwidth of the circuit exceeds 40 MHz. At 10.7 MHz, the
GC threshold is 100 μV (−67 dBm) and its maximum gain is
A
83 dB (20 log 1.4 V/100 μV). The circuit holds its output at
1.4 V rms for inputs as low as −67 dBm to +15 dBm (82 dB),
where the input signal exceeds the maximum input rating of the
AD603. For a 30 dBm input at 10.7 MHz, the second harmonic
is 34 dB down from the fundamental, and the third harmonic is
35 dB down from the fundamental.
. Note that the output amplitude under sine
AGC
helps to minimize distortion
AV
CAUTION
Careful component selection, circuit layout, power supply
decoupling, and shielding are needed to minimize the susceptibility
of the AD603 to interference from signals such as those from
radio and TV stations. In bench evaluation, it is recommended
to place all of the components into a shielded box and use
feedthrough decoupling networks for the supply voltage. Circuit
layout and construction are also critical because stray capacitances
and lead inductances can form resonant circuits and are a
potential source of circuit peaking, oscillation, or both.
Rev. H | Page 18 of 24

AD603
VOUT
www.BDTIC.com/ADI
EVALUATION BOARD
The evaluation board of the AD603 enables simple bench-top
experimenting to be performed with easy control of the
AD603. Built-in flexibility allows convenient configuration to
accommodate most operating configurations.
p
hotograph of the AD603 evaluation board.
Figure 48. AD603 Evaluation Board
Figure 48 is a
00539-048
Any dual-polarity power supply capable of providing 20 mA is
all that is required, in addition to whatever test equipment the
user wishes to perform the intended tests.
Referring to the schematic in Figure 49, the input to the VGA is
ingle-ended, ac-coupled, and terminated in 50 Ω to accommodate
s
most commonly available signal generators.
V+
V–
G1 G4G2 G3GND
The output is also ac-coupled and includes a 453 Ω series
resistor. The gain of the AD603 is adjusted by connecting a
voltage source between the GNEG and GPOS test loops. A 0 Ω
resistor, R5, is provided, permitting ground reference of the
differential gain control inputs. For other gain configurations, a
signal generator may be connected to the test loops, or the
GNEG and/or GPOS pins may be biased. Either pin may be
driven to either polarity within the common-mode limits of
−1.2 V to +2.0 V; therefore, to invert the gain slope, simply
consider the GPOS as the reference and drive the GNEG pin
positively with respect to GPOS.
The AD603 includes built-in gain resistors selectable at the
F
DBK pin. The board is shipped with the gain at minimum,
with a 0 Ω resistor installed in R3. For maximum gain, simply
remove R3. Because of the architecture of the AD603, the
bandwidth decreases by 10, but the gain range remains at 40 dB.
Intermediate gain values may be selected by installing a resistor
between the VOUT and FDBK pins.
Figure 50, Figure 51, and Figure 52 show the component and
cuit side copper patterns and silkscreen. A bill of materials is
cir
shown in
Table 5.
GPOS
GNEG
R6
R2
100Ω
V+
C8
10µF
+
25V
R7
AD603
1
GPOS
2
GNEG
3
VINP VNEG
4
COMM FDBK
VPOS
VOUT
8
7
6
5
10µF
25V
0.1µF
C7
+
V+ V–
C1
C4
VIN
W2
R1
R5
0Ω
C5
0.1µF
Figure 49. Schematic of the AD603 Evaluation Board
V+
C6
0.1µF
R3
0Ω
C9
C2
0.1µF
R4
453Ω
W1
C3
0.1µF
VO
00539-050
Figure 50. Component Side Copper
V–
00539-049
Figure 51. Circuit Side Copper
Rev. H | Page 19 of 24
00539-051

AD603
www.BDTIC.com/ADI
G1 G4
V–V+
GND
+
GPOS
GNEG
VIN
W2
C7
R7
R1
C1
R6
C4
R5
C5
R2
DUT
C2
C9
C8
+
R3
C6
C3
W1
VO
R4
VOUT
Pb
G2
Figure 52. Component Side Silk Screen
AD603ARZ
EVALUATION BOARD
G3
RoHS
00539-052
Table 5. Bill of Materials
Qty Name Description Reference Designator Manufacturer Mfg Part Number
5 Capacitors 0.1 μF, 16 V, 0603, X7R C1, C2, C3, C5, C6 KEMET C0603C104K4RACTU
2 Capacitors 10 μF, 25 V, C size tantalum C7, C8 Nichicon F931E106MCC
1 IC Variable gain amplifier DUT Analog Devices, Inc. AD603ARZ
5 Test Loops 0.125” diameter, black G1, G2, G3, G4, GND Components Corp. TP-104-01-00
3 Test Loops 0.125” diameter, purple GNEG, GPOS, VO Components Corp. TP-104-01-07
1 Resistor 100 Ω, 1%, 1/16 W, 0603 R2 Panasonic ERJ-3EKF1000V
2 Resistors 0 Ω, 5%, 1/10 W, 0603 R3, R5 Panasonic ERJ-2GE0R00X
1 Resistor 453 Ω, 1/16 W, 1%, 0603 R4 Panasonic ERJ-3EKF4530V
1 Test Loop 0.125” diameter, red +5V Components Corp. TP-104-01-02
1 Test Loop 0.125” diameter, green −5 V Components Corp. TP-104-01-05
2 Connectors SMA female PC mount, RA VIN, VOUT Amphenol 901-143-6RFX
2 Headers 2-pin 025" sq., 0.1" spacing W1, W2 Molex 22-11-2032
Not inserted C4, C9, R1, R6, R7
Rev. H | Page 20 of 24

AD603
www.BDTIC.com/ADI
OUTLINE DIMENSIONS
0.005 (0.13)
0.200 (5.08)
MAX
0.200 (5.08)
0.125 (3.18)
0.023 (0.58)
0.014 (0.36)
CONTROLLING DIMENSIONS ARE IN INCHES; MILLIMETER DIMENSIONS
(IN PARENTHESES) ARE ROUNDED-OFF INCH EQUIVALENTS FOR
REFERENCE ONLY AND ARE NOT APPROPRIATE FOR USE IN DESIGN.
Figure 53. 8-Lead Ceramic Dual In-Line Package [CERDIP]
Dim
0.055 (1.40)
MIN
14
0.100 (2.54) BSC
0.405 (10.29) MAX
MAX
0.070 (1.78)
0.030 (0.76)
58
0.310 (7.87)
0.220 (5.59)
0.060 (1.52)
0.015 (0.38)
0.150 (3.81)
MIN
SEATING
PLANE
15°
0°
(Q-8)
ensions shown in inches and (millimeters)
5.00 (0.1968)
4.80 (0.1890)
0.320 (8.13)
0.290 (7.37)
0.015 (0.38)
0.008 (0.20)
4.00 (0.1574)
3.80 (0.1497)
0.25 (0.0098)
0.10 (0.0040)
COPLANARITY
0.10
CONTROLL ING DIMENSI ONS ARE IN MILLIMETERS; INCH DI MENSIONS
(IN PARENTHESES) ARE ROUNDED-OFF MILLIMETER EQUIVALENTS FOR
REFERENCE ONLY AND ARE NOT APPROPRI ATE FOR USE IN DES IGN.
85
1
1.27 (0.0500)
SEATING
PLANE
COMPLIANT TO JEDEC STANDARDS MS-012-A A
BSC
6.20 (0.2441)
5.80 (0.2284)
4
1.75 (0.0688)
1.35 (0.0532)
0.51 (0.0201)
0.31 (0.0122)
8°
0°
0.25 (0.0098)
0.17 (0.0067)
0.50 (0.0196)
0.25 (0.0099)
1.27 (0.0500)
0.40 (0.0157)
45°
012407-A
Figure 54. 8-Lead Standard Small Outline Package [SOIC-N]
Narrow B
ody (R-8)
Dimensions shown in millimeters and (inches)
ORDERING GUIDE
Model Temperature Range Package Description Package Option
AD603AR −40°C to +85°C 8-Lead SOIC R-8
AD603AR-REEL −40°C to +85°C 8-Lead SOIC, 13" Reel R-8
AD603AR-REEL7 −40°C to +85°C 8-Lead SOIC, 7" Reel R-8
AD603ARZ
AD603ARZ-REEL
AD603ARZ-REEL7
AD603AQ −40°C to +85°C 8-Lead CERDIP Q-8
AD603SQ/883B
AD603-EVALZ
AD603ACHIPS DIE
1
Z = RoHS Compliant Part.
2
Refer to AD603 Military data sheet. Also available as 5962-9457203MPA.
1
1
1
2
1
−40°C to +85°C 8-Lead SOIC R-8
−40°C to +85°C 8-Lead SOIC, 13" Reel R-8
−40°C to +85°C 8-Lead SOIC, 7" Reel R-8
−55°C to +125°C 8-Lead CERDIP Q-8
Evaluation Board
Rev. H | Page 21 of 24

AD603
www.BDTIC.com/ADI
NOTES
Rev. H | Page 22 of 24

AD603
www.BDTIC.com/ADI
NOTES
Rev. H | Page 23 of 24

AD603
www.BDTIC.com/ADI
NOTES
©2007 Analog Devices, Inc. All rights reserved. Trademarks and
registered trademarks are the property of their respective owners.
C00539-0-5/07(H)
T
Rev. H | Page 24 of 24
TTT
 Loading...
Loading...