

Page 1
Low Cost, Complete 12-Bit
a
FEATURES
Complete Monolithic Resolver-to-Digital Converter
Incremental Encoder Emulation (1024-Line)
Absolute Serial Data (12-Bit)
Differential Inputs
12-Bit Resolution
Industrial Temperature Range
20-Lead PLCC
Low Power (50 mW)
APPLICATIONS
Industrial Motor Control
Servo Motor Control
Industrial Gauging
Encoder Emulation
Automotive Motion Sensing and Control
Factory Automation
Limit Switching
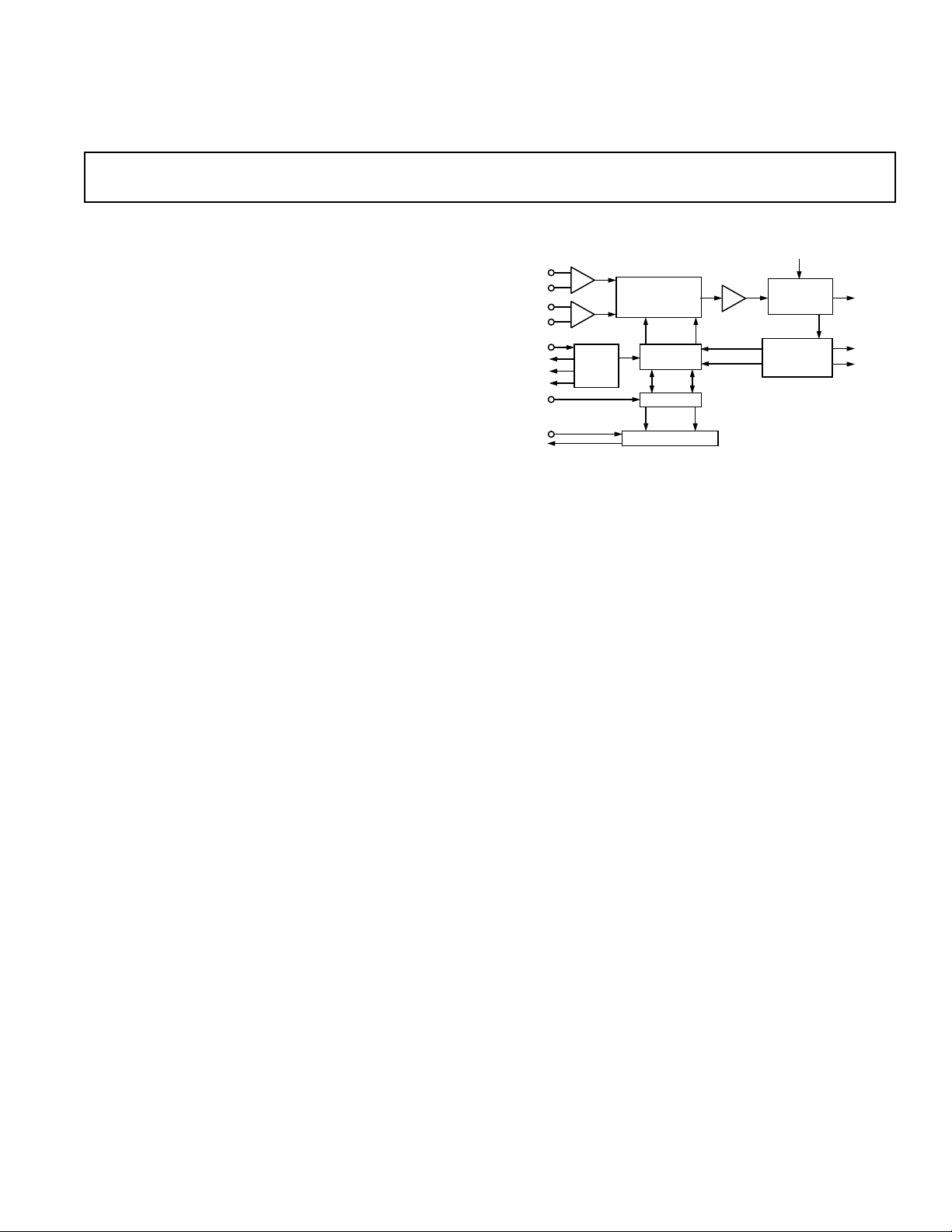
GENERAL DESCRIPTION
The AD2S90 is a complete 12-bit resolution tracking resolverto-digital converter. No external components are required to
operate the device.
The converter accepts 2 V rms ± 10% input signals in the range
3 kHz–20 kHz on the SIN, COS and REF inputs. A Type II
servo loop is employed to track the inputs and convert the input
SIN and COS information into a digital representation of the
input angle. The bandwidth of the converter is set internally at
1 kHz within the tolerances of the device. The guaranteed maximum tracking rate is 500 rps.
Angular position output information is available in two forms,
absolute serial binary and incremental A quad B.
The absolute serial binary output is 12-bit (1 in 4096). The data
output pin is high impedance when Chip Select CS is logic HI.
This allows the connection of multiple converters onto a common bus. Absolute angular information in serial pure binary
form is accessed by CS followed by the application of an external clock (SCLK) with a maximum rate of 2 MHz.
The encoder emulation outputs A, B and NM continuously
produce signals equivalent to a 1024 line encoder. When decoded this corresponds to 12 bits of resolution. Three common
north marker pulsewidths are selected via a single pin (NMC).
An analog velocity output signal provides a representation of
velocity from a rotating resolver shaft traveling in either a clockwise or counterclockwise direction.
Resolver-to-Digital Converter
AD2S90
FUNCTIONAL BLOCK DIAGRAM
REF
SIN
SIN LO
COS
COS LO
NMC
NM
CS
SCLK
DATA
A
B
ANGLE
u
DECODE
LOGIC
HIGH ACCURACY
SIN COS
MULTIPLIER
DIGITAL
ANGLE f
UP-DOWN
COUNTER
LATCH
SERIAL INTERFACE
The AD2S90 operates on ±5 V dc ± 5% power supplies and is
fabricated on Analog Devices’ Linear Compatible CMOS process (LC
2
MOS). LC2MOS is a mixed technology process that
combines precision bipolar circuits with low power CMOS logic
circuits.
PRODUCT HIGHLIGHTS
Complete Resolver-Digital Interface. The AD2S90 provides
the complete solution for digitizing resolver signals (12-bit resolution) without the need for external components.
Dual Format Position Data. Incremental encoder emulation
in standard A QUAD B format with selectable North Marker
width. Absolute serial 12-bit angular binary position data
accessed via simple 3-wire interface.
Single High Accuracy Grade in Low Cost Package. ±10.6 arc
minutes of angular accuracy available in a 20-lead PLCC.
Low Power. Typically 50 mW power consumption.
SIN (u – f
ERROR
AMPLIFIER
U/D
CLK
)
P.S.D. AND
FREQUENCY
SHAPING
HIGH
DYNAMIC
RANGE V.C.O.
VEL
CLKOUT
DIR
REV. D
Information furnished by Analog Devices is believed to be accurate and
reliable. However, no responsibility is assumed by Analog Devices for its
use, nor for any infringements of patents or other rights of third parties
which may result from its use. No license is granted by implication or
otherwise under any patent or patent rights of Analog Devices.
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781/329-4700 World Wide Web Site: http://www.analog.com
Fax: 781/326-8703 © Analog Devices, Inc., 1999
Page 2
(VDD = +5 V ⴞ 5%, VSS = –5 V ⴞ 5%, AGND = DGND = 0 V, TA = –40ⴗC to +85ⴗC unless
AD2S90–SPECIFICATIONS
otherwise noted)
Parameter Min Typ Max Units Test Condition
SIGNAL INPUTS
Voltage Amplitude 1.8 2.0 2.2 V rms Sinusoidal Waveforms, Differential
SIN to SINLO, COS to COSLO
Frequency 3 20 kHz
Input Bias Current 100 nA V
Input Impedance 1.0 MΩ V
Common-Mode Volts
1
100 mV peak CMV @ SINLO, COSLO w.r.t.
= 2 ± 10% V rms
IN
= 2 ± 10% V rms
IN
CMRR 60 dB AGND @ 10 kHz
REFERENCE INPUT
Voltage Amplitude 1.8 2.0 3.35 V rms Sinusoidal Waveform
Frequency 3 20 kHz
Input Bias Current 100 nA
Input Impedance 100 kΩ
Permissible Phase Shift –10 +10 Degrees Relative to SIN, COS Inputs
CONVERTER DYNAMICS
Bandwidth 700 840 1000 Hz
Maximum Tracking Rate 500 rps
Maximum VCO Rate (CLKOUT) 2.048 MHz
Settling Time
1° Step 2 7 ms
179° Step 20 ms
ACCURACY
Angular Accuracy
Repeatability
2
3
±10.6 + 1 LSB arc min
1 LSB
VELOCITY OUTPUT
Scaling 120 150 180 rps/V dc
Output Voltage at 500 rps ±2.78 ±3.33 ±4.17 V dc
Load Drive Capability ±250 µAV
= ±2.5 V dc (typ), RL ≥ 10 kΩ
OUT
LOGIC INPUTS SCLK, CS
Input High Voltage (V
Input Low Voltage (V
Input Current (I
IN
) 3.5 V dc VDD = +5 V dc, VSS = –5 V dc
INH
) 1.5 V dc VDD = +5 V dc, VSS = –5 V dc
INL
) 10µA
Input Capacitance 10 pF
LOGIC OUTPUTS DATA, A, B,
4
NM, CLKOUT, DIR VDD = +5 V dc, VSS = –5 V dc
Output High Voltage 4.0 V dc I
Output Low Voltage 1.0 V dc I
0.4 V dc I
= 1 mA
OH
= 1 mA
OL
= 400 µA
OL
SERIAL CLOCK (SCLK)
SCLK Input Rate 2 MHz
NORTH MARKER CONTROL (NMC)
90° +4.75 +5.0 +5.25 V dc North Marker Width Relative to
180° –0.75 DGND +0.75 V dc “A” Cycle
360° –4.75 –5.0 –5.25 V dc
POWER SUPPLIES
V
DD
V
SS
I
DD
I
SS
NOTES
1
If the tolerance on signal inputs = ±5%, then CMV = 200 mV.
2
1 LSB = 5.3 arc minute.
3
Specified at constant temperature.
4
Output load drive capability.
Specifications subject to change without notice.
+4.75 +5.00 +5.25 V dc
–4.75 –5.00 –5.25 V dc
10 mA
10 mA
–2–
REV. D
Page 3
TIMING CHARACTERISTICS
(VDD = +5 V ⴞ 5%, VSS = –5 V ⴞ 5%, AGND = DGND = 0 V, TA = –40ⴗC to +85ⴗC unless
1, 2
otherwise noted)
AD2S90
CSB
SCLK
DATA
t
2
t
3
t
4
t
1
*THE MINIMUM ACCESS TIME: USER DEPENDENT
t
5
t
6
t*
LSBMSB
t
7
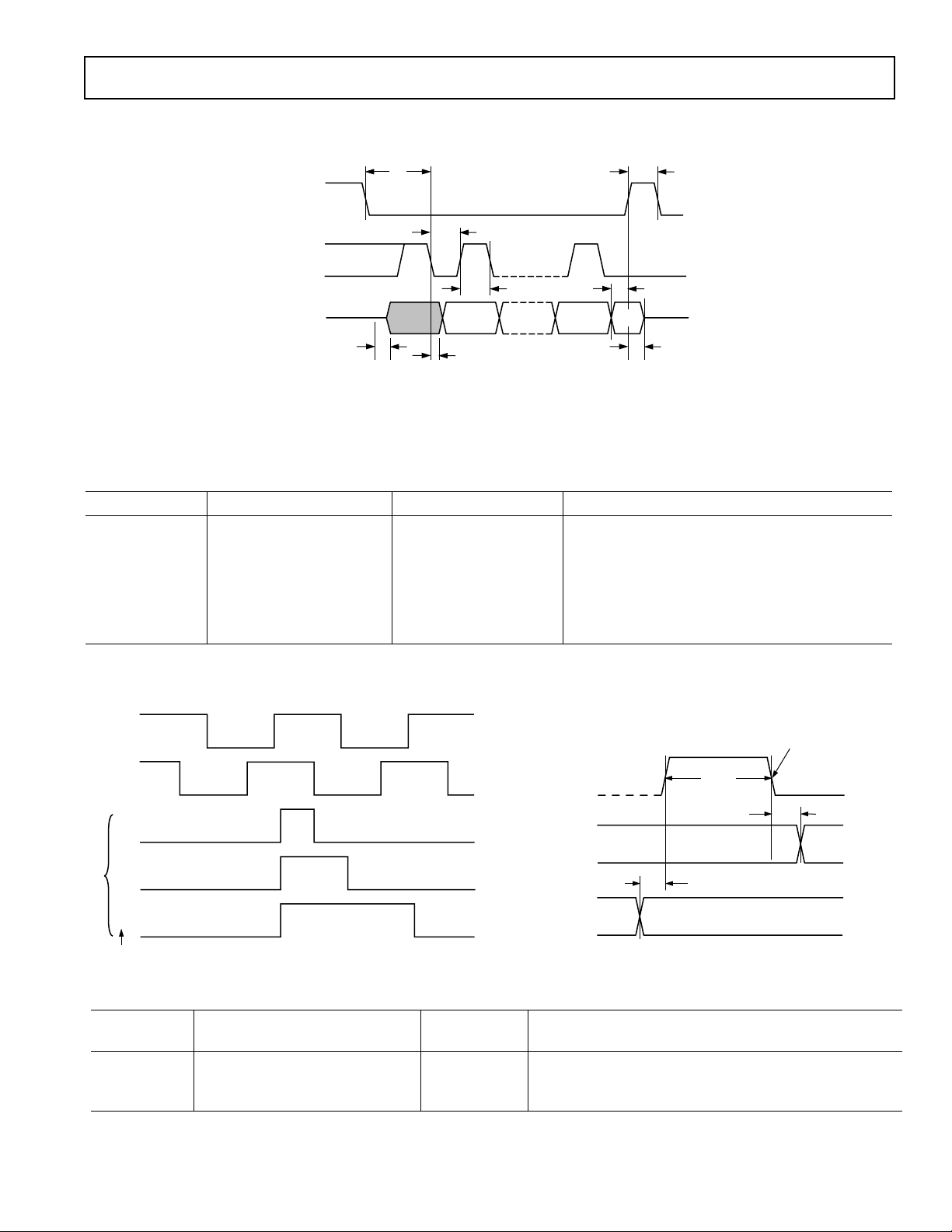
Figure 1. Serial Interface
NOTES
1
Timing data are not 100% production tested. Sample tested at +25°C only to ensure conformance to data sheet limits. Logic output timing tests carried out using
10 pF, 100 kΩ load.
2
Capacitance of data pin in high impedance state = 15 pF.
Parameter AD2S90 Units Test Conditions/Notes
t
1
1
t
2
t
3
t
4
t
5
t
6
t
7
NOTE
1
SCLK can only be applied after t2 has elapsed.
150 ns max CS to DATA Enable
600 ns min CS to 1st SCLK Negative Edge
250 ns min SCLK Low Pulse
250 ns min SCLK High Pulse
100 ns max SCLK Negative Edge to DATA Valid
600 ns min CS High Pulsewidth
150 ns max CS High to DATA High Z (Bus Relinquish)
A
B
908
1808
NM
3608
NUMBER OF DEGREES REFERS TO WIDTH RELATIVE TO "A" CYCLE
Figure 2. Incremental Encoder
CLKOUT
A, B, NM
t
DIR
DIR
Figure 3. DIR/CLKOUT/A, B and NM Timing
AD2S90
Parameter Min Max Units Test Conditions/Notes
t
DIR
t
CLK
t
ABN
250 400 ns CLKOUT Pulsewidth
200 ns DIR to CLKOUT Positive Edge
250 ns CLKOUT Negative Edge to A, B and NM Transition
COUNTER IS CLOCKED
ON THIS EDGE
t
CLK
t
ABN
REV. D
–3–
Page 4
AD2S90
RECOMMENDED OPERATING CONDITIONS
Power Supply Voltage (VDD – V
) . . . . . . . . . . ±5 V dc ± 5%
SS
Analog Input Voltage (SIN, COS & REF) . . . . .2 V rms ± 10%
Signal and Reference Harmonic Distortion . . . . . . . . . . . . 10%
Phase Shift between Signal and Reference . . . . . . . . . . . . . ±10°
Ambient Operating Temperature Range
Industrial (AP) . . . . . . . . . . . . . . . . . . . . . . . –40°C to +85°C
ABSOLUTE MAXIMUM RATINGS*
VDD to AGND . . . . . . . . . . . . . . . . . . . . –0.3 V dc to +7.0 V dc
to AGND . . . . . . . . . . . . . . . . . . . . +0.3 V dc to –7.0 V dc
V
SS
AGND to DGND . . . . . . . . . . . . –0.3 V dc to V
+ 0.3 V dc
DD
Analog Inputs to AGND
REF . . . . . . . . . . . . . . . . . . V
SIN, SIN LO . . . . . . . . . . . V
COS, COS LO . . . . . . . . . . V
– 0.3 V dc to VDD + 0.3 V dc
SS
– 0.3 V dc to VDD + 0.3 V dc
SS
– 0.3 V dc to VDD + 0.3 V dc
SS
Analog Output to AGND
VEL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . V
SS
to V
DD
Digital Inputs to DGND, CSB,
SCLK, RES . . . . . . . . . . . . . . . –0.3 V dc to V
+ 0.3 V dc
DD
Digital Outputs to DGND, NM, A, B,
DIR, CLKOUT DATA . . . . . . –0.3 V dc to V
+ 0.3 V dc
DD
Operating Temperature Range
Industrial (AP) . . . . . . . . . . . . . . . . . . . . . . . –40°C to +85°C
Storage Temperature Range . . . . . . . . . . . . . –65°C to +150°C
Lead Temperature (Soldering 10 sec) . . . . . . . . . . . . . . 300°C
Power Dissipation to +75°C . . . . . . . . . . . . . . . . . . . . 300 mW
Derates above +75°C by . . . . . . . . . . . . . . . . . . . . . 10 mW/°C
*Stresses above those listed under Absolute Maximum Ratings may cause perma-
nent damage to the device. This is a stress rating only; functional operation of the
device at these or any other conditions above those indicated in the operational
section of this specification is not implied. Exposure to absolute maximum rating
conditions for extended periods may affect device reliability.
ORDERING GUIDE
Model Temperature Range Accuracy Package Option
AD2S90AP –40°C to +85°C 10.6 arc min P-20A
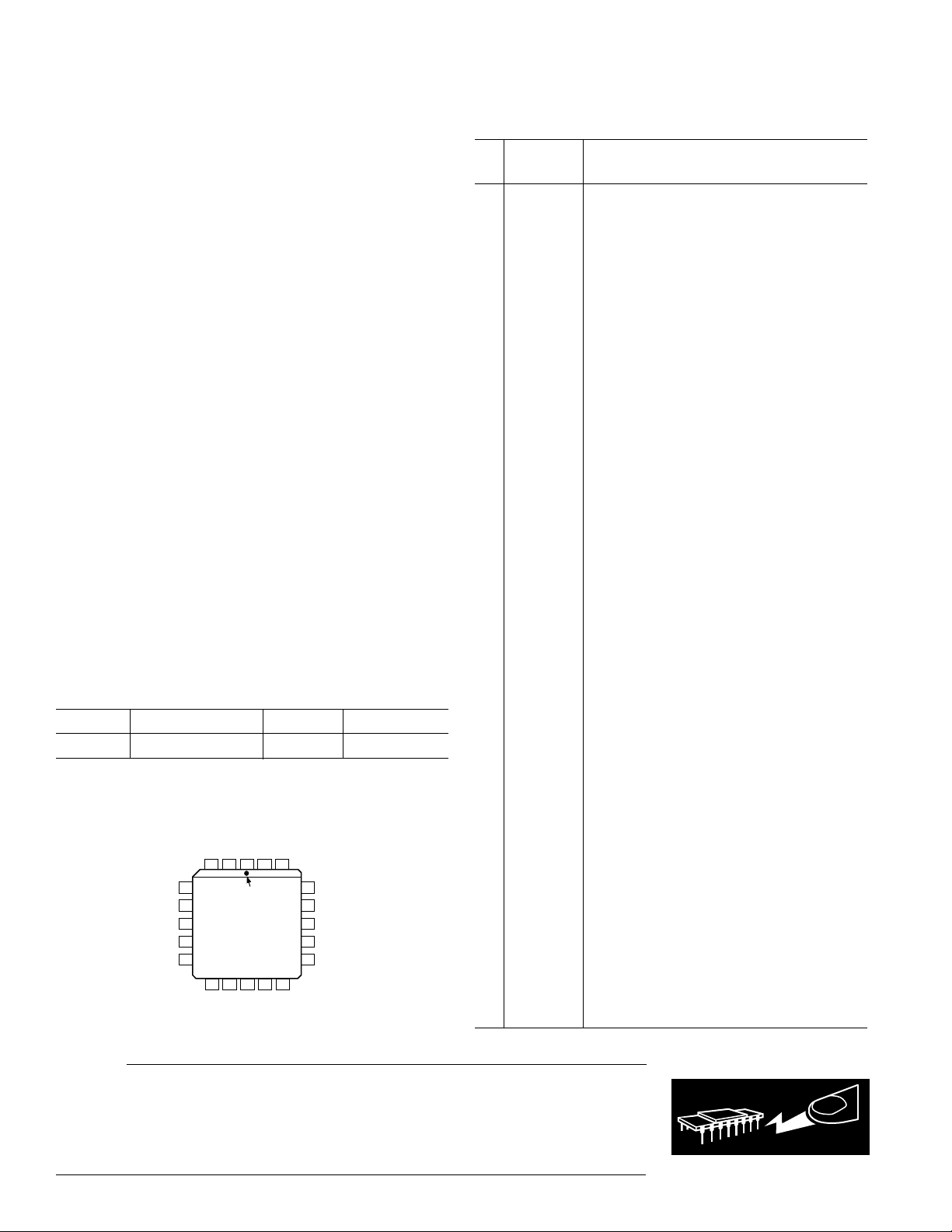
PIN CONFIGURATION
SIN LO
SIN
AGND
COS
DATA
SCLK
CS
4
5
6
7
A
8
B
3 2 1 20 19
AD2S90
TOP VIEW
(Not to Scale)
9 10 11 12 13
NM
DIR
PIN 1
IDENTIFIER
SS
V
DGND
COS LO
18
17
16
15
14
DD
V
REF
VEL
CLKOUT
NMC
V
DD
PIN DESCRIPTIONS
Pin
No. Mnemonic Function
1 AGND Analog ground, reference ground.
2 SIN SIN channel noninverting input connect to
resolver SIN HI output. SIN to SIN LO =
2 V rms ± 10%.
3 SIN LO SIN channel inverting input connect to
resolver SIN LO.
4 DATA Serial interface data output. High impedance
with CS = HI. Enabled by CS = 0.
5 SCLK Serial interface clock. Data is clocked out on
“first” negative edge of SCLK after a LO transition on CS. 12 SCLK pulses to clock data out.
6 CS Chip select. Active LO. Logic LO transition
enables DATA output.
7 A Encoder A output.
8 B Encoder B output.
9 NM Encoder North Marker emulation output.
Pulse triggered as code passes through zero.
Three common pulsewidths available.
10 DIR Indicates direction of rotation of input.
Logic HI = increasing angular rotation.
Logic LO = decreasing angular rotation.
11 DGND Digital power ground return.
12 V
13 V
14 V
SS
DD
DD
Negative power supply, –5 V dc ± 5%.
Positive power supply, +5 V dc ± 5%.
Positive power supply, +5 V dc ± 5%. Must
be connected to Pin 13.
15 NMC North marker width control. Internally pulled
HI via 50 kΩ nominal.
16 CLKOUT Internal VCO clock output. Indicates angular
velocity of input signals. Max nominal rate =
1.536 MHz. CLKOUT is a 300 ns positive pulse.
17 VEL Indicates angular velocity of input signals.
Positive voltage w.r.t. AGND indicates increasing angle. FSD = 375 rps.
18 REF Converter reference input. Normally derived
from resolver primary excitation. REF = 2 V
rms nominal. Phase shift w.r.t. COS and SIN
= ±10° max
19 COS LO COS channel inverting input. Connect to
resolver COS LO.
20 COS COS channel noninverting input. Connect to
resolver COS HI output. COS = 2 V rms ± 10%.
CAUTION
The AD2S90 features an input protection circuit consisting of large “distributed” diodes and
polysilicon series resistors to dissipate both high energy discharges (Human Body Model) and
fast, low energy pulses (Charges Device Model).
Proper ESD precautions are strongly recommended to avoid functional damage or performance
degradation. For further information on ESD precautions, refer to Analog Devices ESD
Prevention Manual.
–4–
WARNING!
ESD SENSITIVE DEVICE
REV. D
Page 5

AD2S90
RESOLVER FORMAT SIGNALS
A resolver is a rotating transformer which has two stator windings and one rotor winding. The stator windings are displaced
mechanically by 90° (see Figure 4). The rotor is excited with an
ac reference. The amplitude of subsequent coupling onto the
stator windings is a function of the position of the rotor (shaft)
relative to the stator. The resolver, therefore, produces two
output voltages (S3–S1, S2–S4) modulated by the SINE and
COSINE of shaft angle. Resolver format signals refer to the
signals derived from the output of a resolver. Equation 1 illustrates the output form.
S3–S1 = EO SIN ωt • SIN
S2–S4 = EO SIN ωt • COS
θ
θ
(1)
where: θ = shaft angle
SIN ωt = rotor excitation frequency
E
= rotor excitation amplitude
O
Principle of Operation
The AD2S90 operates on a Type 2 tracking closed-loop principle. The output continually tracks the position of the resolver
without the need for external convert and wait states. As the
transducer moves through a position equivalent to the least
significant bit weighting, the output is updated by one LSB.
On the AD2S90, CLKOUT updates corresponding to one LSB
increment. If we assume that the current word state of the
up-down counter is φ, S3–S1 is multiplied by COS φ and S2–S4
is multiplied by SIN φ to give:
E
SIN ωt • SIN θ COS
O
EO SIN ωt • COS θ SIN
φ
φ
(2)
An error amplifier subtracts these signals giving:
E
SIN θ • (SIN θ COS φ – COS θ SIN φ)
O
or
E
SIN ωt • SIN (θ – φ) (3)
O
where (θ – φ) = angular error
A phase sensitive detector, integrator and voltage controlled
oscillator (VCO) form a closed loop system which seeks to null
sin (θ – φ). When this is accomplished the word state of the
up/down counter, φ, equals within the rated accuracy of the
converter, the resolver shaft angle θ.
For more information on the operation of the converter, see
Circuit Dynamics section.
S2 TO S4
(COS)
S3 TO S1
(SIN)
R2 TO R4
(REF)
08
908 1808 2708 3608
u
Figure 4. Electrical and Physical Resolver Representation
Connecting The Converter
Refer to Figure 4. Positive power supply V
= +5 V dc ± 5%
DD
should be connected to Pin 13 & Pin 14 and negative power
supply V
= –5 V dc ± 5% to Pin 12. Reversal of these power
SS
supplies will destroy the device. S3 (SIN) and S2 (COS)
from the resolver should be connected to the SIN and COS pins
of the converter. S1 (SIN) and S4 (COS) from the resolver
should be connected to the SINLO and COSLO pins of the
converter. The maximum signal level of either the SIN or COS
resolver outputs should be 2 V rms ± 10%. The AD2S90
AGND pin is the point at which all analog signal grounds should
be star connected. The SIN LO and COS LO pins on the
AD2S90 should be connected to AGND. Separate screened
twisted cable pairs are recommended for all analog inputs SIN,
COS, and REF. The screens should terminate at the converter
AGND pin.
North marker width selection is controlled by Pin 15, NMC.
Application of V
, 0 V, or VSS to NMC will select standard
DD
90°, 180° and 360° pulsewidths. If unconnected, the NM pulse
defaults to 90°. For a more detailed description of the output
formats available see the Position Output section.
REV. D
TWISTED PAIR
SCREENED
CABLE
S2
R1
R2
RESOLVER
OSCILLATOR
15161718 14
S4
S2
S4
S3
S1
S3
S1
POWER RETURN
REF
19
COS LO
20
COS
AGND
1
2
SIN
SIN LO
3
V
DD
V
V
DGND
AD2S90AP
76548
DD
10nF
10nF
13
12
SS
11
10
9
47mF
47mF
+5V
0V (POWER GROUND)
–5V
Figure 5. Connecting the AD2S90 to a Resolver
–5–
Page 6

AD2S90
ABSOLUTE POSITION OUTPUT
SERIAL INTERFACE
Absolute angular position is represented by serial binary data
and is extracted via a three-wire interface, DATA, CS and
SCLK. The DATA output is held in a high impedance state
when CS is HI.
Upon the application of a Logic LO to the CS pin, the DATA
output is enabled and the current angular information is transferred from the counters to the serial interface. Data is retrieved
by applying an external clock to the SCLK pin. The maximum
data rate of the SCLK is 2 MHz. To ensure secure data retrieval
it is important to note that SCLK should not be applied until a
minimum period of 600 ns after the application of a Logic LO
to CS. Data is then clocked out, MSB first, on successive negative edges of the SCLK; 12 clock edges are required to extract
the full 12 bits of data. Subsequent negative edges greater than
the defined resolution of the converter will clock zeros from the
data output if CS remains in a low state.
If a resolution of less than 12 bits is required, the data access
can be terminated by releasing CS after the required number of
bits have been read.
CSB
SCLK
DATA
t
2
t
3
t
4
t
1
*
THE MINIMUM ACCESS TIME: USER DEPENDENT
t
5
t
6
t*
LSBMSB
t
7
Figure 6. Serial Read Cycle
CS can be released a minimum of 100 ns after the last negative
edge. If the user is reading data continuously, CS can be reapplied a minimum of 250 ns after it is released (see Figure 6).
The maximum read time is given by: (12-bits read @ 2 MHz)
Max RD Time = [600 + (12 × 500) + 600 + 100] = 7.30 µs.
INCREMENTAL ENCODER OUTPUTS
The incremental encoder emulation outputs A, B and NM are
free running and are always valid, providing that valid resolver
format input signals are applied to the converter.
The AD2S90 emulates a 1024-line encoder. Relating this to
converter resolution means one revolution produces 1024 A, B
pulses. B leads A for increasing angular rotation (i.e., clockwise
direction). The addition of the DIR output negates the need for
external A and B direction decode logic. DIR is HI for increasing angular rotation.
The north marker pulse is generated as the absolute angular
position passes through zero. The AD2S90 supports the three
industry standard widths controlled using the NMC pin. Figure
7 details the relationship between A, B and NM. The width of
NM is defined relative to the A cycle.
INCREASING ANGLE
A
B
908
1808
*
NM
3608
NUMBER OF DEGREES REFERS TO WIDTH RELATIVE TO "A" CYCLE
WIDTH
SELECTABLE WITH THREE - LEVEL
*
CONTROL PIN "MARKER" DEFAULT
TO 908 USING INTERNAL PULL - UP.
LEVEL
+V
DD
0
–V
SS
908
1808
3608
Figure 7. A, B and NM Timing
Unlike incremental encoders, the AD2S90 encoder output is
not subject to error specifications such as cycle error, eccentric-
ity, pulse and state width errors, count density and phase φ.
The maximum speed rating, n, of an encoder is calculated from
its maximum switching frequency, f
, and its ppr (pulses per
MAX
revolution).
60 × f
n =
MAX
PPR
The AD2S90 A, B pulses are initiated from CLKOUT which
has a maximum frequency of 2.048 MHz. The equivalent
encoder switching frequency is:
1/4 × 2.048 MHz = 512 kHz (4 updates = 1 pulse)
At 12 bits the ppr = 1024, therefore the maximum speed, n, of
the AD2S90 is:
×
60 512000
n rpm=
1024
This compares favorably with encoder specifications where f
=
30000
MAX
is specified from 20 kHz (photo diodes) to 125 kHz (laser based)
depending on the light system used. A 1024 line laser-based
encoder will have a maximum speed of 7300 rpm.
The inclusion of A, B outputs allows the AD2S90 + resolver
solution to replace optical encoders directly without the need to
change or upgrade existing application software.
–6–
REV. D
Page 7

AD2S90
VELOCITY OUTPUT
The analog velocity output VEL is scaled to produce 150 rps/V
dc ± 15%. The sense is positive V dc for increasing angular
rotation. VEL can drive a maximum load combination of
10 kΩ and 30 pF. The internal velocity scaling is fixed.
POSITION CONTROL
The rotor movement of dc or ac motors used for servo control is
monitored at all times. Feedback transducers used for this purpose detect either relative position in the case of an incremental
encoder or absolute position and velocity using a resolver. An
incremental encoder only measures change in position not
actual position.
Closed Loop Control Systems
The primary demand for a change in position must take into
account the magnitude of that change and the associated acceleration and velocity characteristics of the servo system. This is
necessary to avoid “hunting” due to over- or underdamping of
the control employed.
A position loop needs both actual and demand position information. Algorithms consisting of proportional, integral and
derivative control (PID) may be implemented to control the
velocity profile.
A simplified position loop is shown in Figure 8.
POSITION
DEMAND
POSITION CONTROLLER
ACTUAL
POSITION
SERVO
AMP
AD2S90
SERVO
MOTOR
RE-
SOLVER
Figure 8. Position Loop
MOTION CONTROL PROCESSES
Advanced VLSI designs mean that silicon system blocks are now
available to achieve high performance motion control in servo
systems.
A digital position control system using the AD2S90 is shown in
Figure 9. In this system the task of determining the acceleration
and velocity characteristics is fulfilled by programming a trapezoidal velocity profile via the I/O port.
As can be seen from Figure 9 encoder position feedback information is used. This is a popular format and one which the
AD2S90 emulates thereby facilitating the replacement of encoders with an AD2S90 and a resolver. However, major benefits
can be realized by adopting the resolver principle as opposed to
the incremental technique.
Incremental feedback based systems normally carry out a periodic check between the position demanded by the controller
and the increment position count. This requires software and
hardware comparisons and battery backup in the case of power
failure. If there is a supply failure and the drive system moves,
unless all parts of the system are backed up, a reset to a known
datum point needs to take place. This can be extremely hazardous in many applications. The AD2S90 gets round this problem
by supplying an absolute position serial data stream upon request, thus removing the need to reset to a known datum.
HOST I/O
PORT
COMMAND POSITION
SEQUENCER (32-BIT)
+
S
–
POSITION
FEEDBACK
PROCESSOR
(32-BIT)
IN, A, B
ABSOLUTE
POSITION
HOST
INTERFACE
DIGITAL
PID
DAC
FILTER
PORT
(16-BIT)
INCREMENTAL POSITION
TO HOST PROCESSOR
8 – 12
DAC
POWER
AD2S90
AMP
DC
MOTOR
OPTIONAL
VELOCITY
FEEDBACK
RESOLVER
Figure 9. Practical Implementation of the AD2S90
DSP Interfacing
The AD2S90 serial output is ideally suited for interfacing to
DSP configured microprocessors. Figures 10 to 13 illustrate
how to configure the AD2S90 for serial interfacing to the DSP.
ADSP-2105 Interfacing
Figure 10 shows the AD2S90 interfaced to an ADSP-2105. The
on-chip serial port of the ADSP-2105 is used in alternate framing receive mode with internal framing (internally inverted) and
internal serial clock generation (externally inverted) options
selected. In this mode the ADSP-2105 provides a CS and a
serial clock to the AD2S90. The serial clock is inverted to prevent timing errors as a result of both the AD2S90 and ADSP2105 clock data on the negative edge of SCLK. The first data
bit is void; 12 bits of significant data then follow on each consecutive negative edge of the clock. Data is clocked from the
AD2S90 into the data receive register of the ADSP-2105. This
is internally set to 13 bit (12 bits and one “dummy” bit) when
13 bits are received. The serial port automatically generates an
internal processor interrupt. This allows the ADSP-2105 to read
12 significant bits at once and continue processing.
The ADSP-2101, ADSP-2102, ADSP-2111 and 21msp50 can
all interface to the AD2S90 with similar interface circuitry.
ADSP-2105
SCLK
RFS
DR
NOTE:
ADDITIONAL PINS OMITTED FOR CLARITY
SCLK
CS
DATA
AD2S90
Figure 10. ADSP-2105/AD2S90 Serial Interface
REV. D
–7–
Page 8
AD2S90
TMS32020 Interfacing
Figure 11 shows the serial interface between the AD2S90 and
the TMS32020. The interface is configured in alternate internal
framing, external clock (externally inverted) mode. Sixteen bits
of data are clocked from the AD2S90 into the data receive register (DRR) of the TMS32020. The DRR is fixed at 16 bits. To
obtain the 12-significant bits, the processor needs to execute
three right shifts. (First bit read is void, the last three will be
zeros). When 16 bits have been received by the TMS32020, it
generates an internal interrupt to read the data from the DRR.
SCLK
TMS32020
FSR
DRR
NOTE:
ADDITIONAL PINS OMITTED FOR CLARITY
SCLK
CS
DATA
AD2S90
Figure 11. TMS32020/AD2S90 Serial Interface
DSP56000 Interface
Figure 12 shows a serial interface between the AD2S90 and the
DSP56000. The DSP in configured for normal mode synchronous operation with gated clock with SCLK and SC1 as outputs. SC1 is applied to CS.
Select the AD2S90 and frame the data. The S1 register is fixed
at 16 bits, therefore, to obtain the 12-significant bits the processor needs to execute four right shifts. Once the NEC7720 has
read 16 bits, an internal interrupt is generated to read the internal contents of the S1 register.
SCLK
mPD7720
SIEN
S1
NOTE:
ADDITIONAL PINS OMITTED FOR CLARITY
SCLK
CS
DATA
AD2S90
Figure 13.µPD7720/AD2S90 Serial Interface
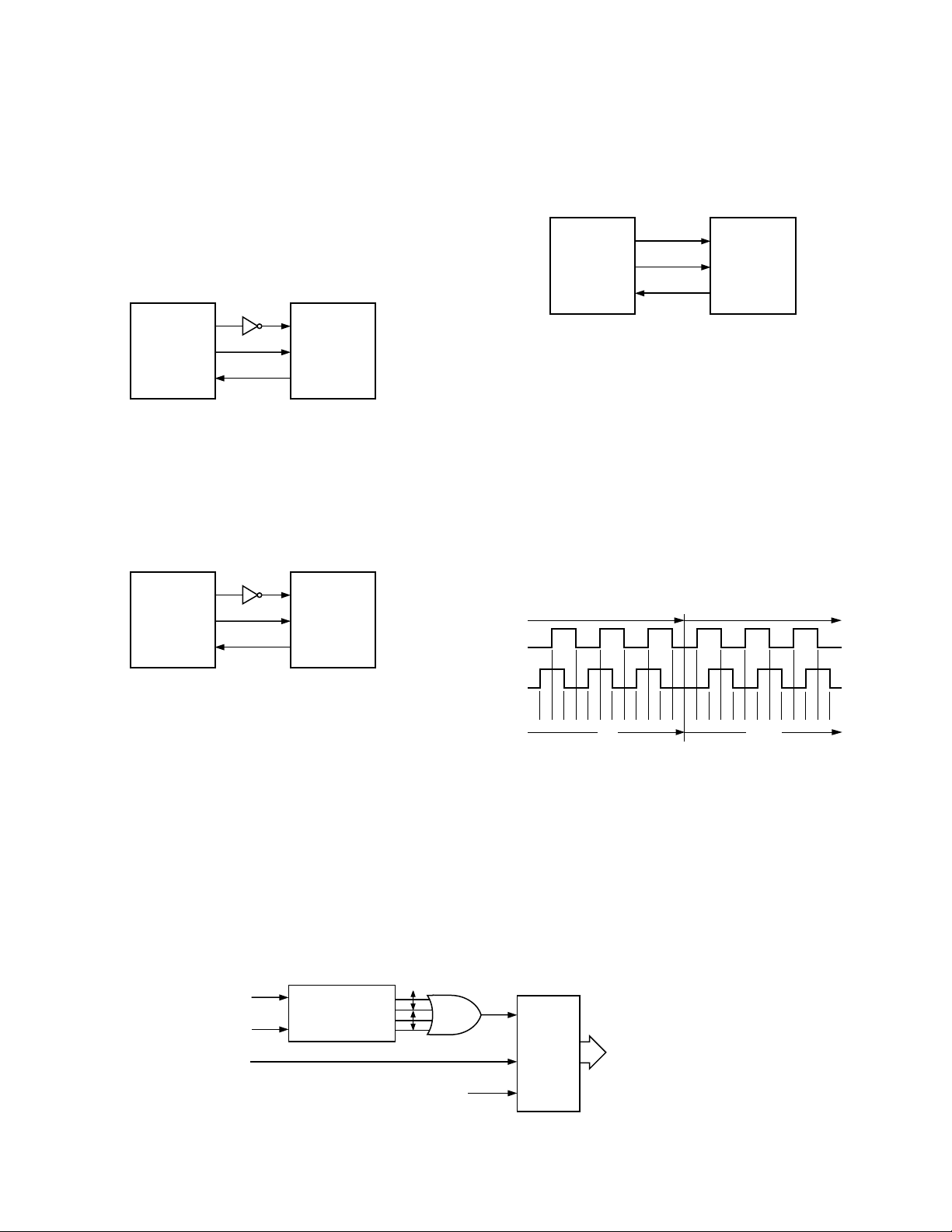
EDGE TRIGGERED 4ⴛ DECODING LOGIC
In most data acquisition or control systems the A, B incremental
outputs must be decoded into absolute information, normally a
parallel word, before they can be utilized effectively.
To decode the A, B outputs on the AD2S90 the user must
implement a 4× decoding architecture. The principle states that
one A, B cycle represents 4 LSB weighted increments of the
converter (see Equation 4).
Up = (↑A) • B + (↓B) • A + (↓A) • B + (↑
Β
) • A
Down = (↑A) • B + (↑B) • A + (↓A) • B + (↓B) • A (4)
SCLK
DSP56000
SC1
SRD
NOTE:
ADDITIONAL PINS OMITTED FOR CLARITY
SCLK
CS
DATA
AD2S90
Figure 12. DSP56000/AD2S90 Serial Interface
The DSP56000 assumes valid data on the first falling edge of
SCLK. SCLK is inverted to ensure that the valid data is clocked
in after one leading bit. The receive data shift register (SRD) is
set for a 13-bit word.
When this register has received 13 bits of data, it generates an
internal interrupt on the DSP56000 to read the 12 bits of significant data from the register.
NEC7720 Interface
Figure 13 shows the serial interface between the NEC7720 and
the AD2S90. The NEC7720 expects data on the rising edge of
its SCLK output, and therefore unlike the previous interfaces no
inverter is required to clock data into the S1 register. There is
no need to ignore the first data bit read. SIEN is used to Chip
CHA
CHB
DIRECTION
EDGE GENERATOR
A
A
B
B
CLOCKWISE ROTATION COUNTER CLOCKWISE ROTATION
CH A
CH B
UP
DOWN
Figure 14. Principles of 4× Decoding
The algorithms in Equation 4 can be implemented using the
architecture shown in Figure 15. Traditionally the direction of
the shaft is decoded by determining whether A leads B. The
AD2S90 removes the need to derive direction by supplying a
direction output state which can be fed straight into the updown counter.
For further information on this topic please refer to the application note “Circuit Applications of the AD2S90 Resolver-toDigital Converters.”
CLOCK
U/D
RESET
UP/DOWN
COUNTER
PARALLEL
DIGITAL
OUTPUT
Figure 15. 4× Decoding Incremental to Parallel Conversion
–8–
REV. D
Page 9

AD2S90
5
–45
–30
–40
10
–35
1
–15
–25
–20
–10
–5
0
1k100
FREQUENCY – Hz
10k
FREQUENCY – Hz
0
–180
10k
–140
–160
101
–120
–100
–80
–60
–40
–20
1k100
REMOTE MULTIPLE SENSOR INTERFACING
The DATA output of the AD2S90 is held in a high impedance
state until CS is taken LO. This allows a user to operate the
AD2S90 in an application with more than one converter connected on the same line. Figure 16 shows four resolvers interfaced to four AD2S90s. Excitation for the resolvers is provided
locally by an oscillator.
SCLK, DATA and two address lines are fed down low loss
cables suitable for communication links. The two address lines
are decoded locally into CS for the individual converters. Data
is received and transmitted using transmitters and receivers.
A0
A1
RES1
RES2
RES3
RES4
4
4
4
4
2
BUFFER
AD2S90
1
AD2S90
2
AD2S90
3
AD2S90
4
2-4 DECODING
(74HC139)
CS1CS2CS3CS
2
OSC
SCLK
DATA
4
V
DD
V
SS
0V
Figure 16. Remote Sensor Interfacing
The AD2S90 acceleration constant is given by:
KKK
=×≅ ×
12
a
30 10. sec
62
(8)
−
The AD2S90’s design has been optimized with a critically
damped response. The closed-loop transfer function is given by:
θ
OUT
=
θ
IN
st
++ +
1
st
+
1
1
2
s
1
KKstKK
12
3
2
12
(9)
The normalized gain and phase diagrams are given in Figures 18
and 19.
CIRCUIT DYNAMICS/ERROR SOURCES
Transfer Function
The AD2S90 operates as a Type 2 tracking servo loop. An
integrator and VCO/counter perform the two integrations inher-
Figure 18. AD2S90 Gain Plot
ent in a Type 2 loop.
The overall system response of the AD2S90 is that of a unity
gain second order low-pass filter, with the angle of the resolver
as the input and the digital position data as the output. Figure
17 illustrates the AD2S90 system diagram.
VEL OUT
u IN
A2 (S)A1 (S)
u OUT
Figure 17. AD2S90 Transfer Function
The open-loop transfer function is given by:
(1 + st
1+ st
)
1
2
(5)
Figure 19. AD2S90 Phase Plot
OUT
IN
K
1K2
=
2
s
θ
θ
where:
Ksst
1
As
As
()
2
()=
1
=
11
st
1
+
2
K
2
s
=×
K V LSB
1
=×
K LSB V
2
+
tms
10
=
1
ts
90
=.µ
2
4 875
./(sec
, /( sec)
614 400
(6)
)
(7)
REV. D
–9–
Page 10

AD2S90
The small step response is given in Figure 20, and is the time
taken for the converter to settle to within 1 LSB.
ts = 7.00 ms (maximum)
The large step response (steps >20°) applies when the error
voltage will exceed the linear range of the converter. Typically it
will take three times longer to reach the first peak for a 179°
step.
In response to a velocity step [VELOUT/(dθ/dt)] the velocity
output will exhibit the same response characteristics as outlined
above.
108
DEGREES
08
200164 812
Figure 20. Small Step Response
SOURCES OF ERROR
Acceleration Error
A tracking converter employing a Type 2 servo loop does not
suffer any velocity lag, however, there is an additional error due
to acceleration. This additional error can be defined using the
acceleration constant K
Input Acceleration
=
K
a
Error in Output Angle
The numerator and denominator’s units must be consistent. K
of the converter.
a
(10)
a
does not define maximum input acceleration, only the error due to
its acceleration. The maximum acceleration allowable before the
converter loses track is dependent on the angular accuracy
requirements of the system.
Angular Error
K
can be used to predict the output position error for a given
a
input acceleration. The AD2S90 has a fixed K
×
Ka = degrees/sec2 (11)
= 3.0 × 10
a
6
sec–2 if we apply an input accelerating at 100 revs/sec2, the error
can be calculated as follows:
2
(12)
Error in LSBs =
rev LSB rev
100 2
[]
=
Input Acceleration LSB / sec
Kasec
[]
12
2
×
//
sec
×
. sec
30 10
[]
62
–
[]
=
014
LSBs
.
[]
−2
–10–
REV. D
Page 11

AD2S90
AD2S90/AD2S99 TYPICAL CONFIGURATION
Figure 21 shows a typical circuit configuration for the AD2S99
Oscillator and the AD2S90 Resolver-to-Digital Converter. The
maximum level of the SIN and COS input signals to the
AD2S90 should be 2 V rms ±10%. All the analog ground sig-
nals should be star connected to the AD2S90 AGND pin. If
shielded twisted pair cables are used for the resolver signals, the
NC = NO CONNECT
NC
SIN
DGND
COS
COS
S2 S4
R2
R4
RESOLVER
SEL2 = GND
SEL1 = V
SS
F
= 5kHz
OUT
S3
SINREF
S1
NC
shields should also be terminated at the AD2S90 AGND pin.
The SYNREF output of the AD2S99 should be connected to
the REF input pin of the AD2S90 via a 0.1 µF capacitor with a
100 kΩ resistor to GND. This is to block out any dc offset in
the SYNREF signal. For more detailed information please refer
to the AD2S99 data sheet.
V
SS
V
0.1mF
0.1mF
DD
V
4.7mF
4.7mF
0.1mF
0.1mF
DD
V
SS
BIAS
F
SEL1
2
3 1
4
5
AD2S99
TOP VIEW
6
(Not to Scale)
7
8
910111213
NC
SYNREF
0.1mF
18 17 1416 15
REF
19
COS LO
COS
20
AGND
1
SIN
2
3
SIN LO
4
SS
V
V
SEL2
20 19
DD
V
LOS
50kV
100kV
AD2S90
TOP VIEW
(Not to Scale)
586
SS
NC
DGND
7
16
14
4.7mF
V
V
4.7mF
18
17
15
DD
SS
EXC
EXC
AGND
NC
NC
13
12
11
10
9
REV. D
Figure 21. AD2S90 and AD2S99 Example Configuration
–11–
Page 12

AD2S90
OUTLINE DIMENSIONS
Dimensions shown in inches and (mm).
P-20A
20-Lead Plastic Leaded Chip Carrier (PLCC)
0.180 (4.57)
0.050
(1.27)
BSC
0.165 (4.19)
0.110 (2.79)
0.085 (2.16)
0.048 (1.21)
0.042 (1.07)
0.020
(0.50)
R
0.020
(0.50)
0.048 (1.21)
0.042 (1.07)
3
4
IDENTIFIER
TOP VIEW
(PINS DOWN)
8
9
0.356 (9.04)
0.350 (8.89)
0.395 (10.02)
0.385 (9.78)
R
IDENTIFIER
BOTTOM
PIN 1
PIN 1
VIEW
(PINS UP)
19
18
14
13
SQ
SQ
0.056 (1.42)
0.042 (1.07)
0.025 (0.63)
0.015 (0.38)
0.021 (0.53)
0.013 (0.33)
0.032 (0.81)
0.026 (0.66)
0.040 (1.01)
0.025 (0.64)
0.330 (8.38)
0.290 (7.37)
C1653b–2–1/99
–12–
PRINTED IN U.S.A.
REV. D
 Loading...
Loading...