

Datasheet AM29F016B-90SIB, AM29F016B-90SI, AM29F016B-90SEB, AM29F016B-90SE, AM29F016B-90SCB Datasheet (AMD Advanced Micro Devices)
...
PRELIMINARY
Publication# 21444 Rev: B Amendment/+2
Issue Date: April 1998
Am29F016B
16 Megabit (2 M x 8-Bit)
CMOS 5.0 Volt-only, Uniform Sector Flash Memory
DISTINCTIVE CHARACTERISTICS
■ 5.0 V ± 10%, single power supply operation
— Minimizes system level power requirements
■ Manufactured on 0.35 µm process technology
— Compatible with 0.5 µm Am29F016 device
■ High performance
— Access times as fast as 70 ns
■ Low power consumption
— 25 mA typical active read current
— 30 mA typical program/erase current
— 1 µA typical standby current (standard access
time to active mode)
■ Flexible sector architecture
— 32 uniform sectors of 64 Kbytes each
— Any combination of sectors can be erased
— Supports full chip erase
— Group sector protection:
A hardware method of locking sector groups to
prevent any program or erase operations within
that sector group
Temporary Sector Group Unprotect allows code
changes in previously locked sectors
■ Embedded Algorithms
— Embedded Erase algorithm automatically
preprograms and erases the entire chip or any
combination of designated sectors
— Embedded Program algorithm automatically
writes and verifies bytes at specified addresses
■ Minimum 1,000,000 progr am/erase cycles per
sector guaranteed
■ Package options
— 48-pin and 40-pin TSOP
— 44-pin SO
■ Compatible with JEDEC standards
— Pinout and software c ompatible with
single-power-supply Flash standard
— Superior inadvertent write protection
■ Data# Polling and toggle bits
— Provides a software method of detecting
program or erase cycle completion
■ Ready/Busy# output (RY/BY#)
— Provides a hardware method f or detecting
program or erase cycle completion
■ Erase Suspend/Erase Resume
— Suspends a sector erase oper ation to read da ta
from, or program data to, a non-erasing sector,
then resumes the erase operation
■ Hardware reset p in (RESET#)
— Resets internal state machine to the read mode

2 Am29F016B
PRELIMINARY
GENERAL DESCRIPTION
The Am29F016B is a 16 Mbit, 5.0 v olt-only Flash memory organized as 2,097,152 bytes. The 8 bits of data
appear on DQ0–DQ7. The Am29F016B is offered in
48-pin and 40-pin TSOP, and 44-pin SO packages.
This device is designed to be programmed in-s ystem
with the standard system 5.0 volt V
CC
supply. A 12.0
volt V
PP
is not required for program or erase
operations. The device can also be programmed in
standard EPROM programmers.
This device is manufactured using AMD’s 0.35 µm
process technology, and offers all the f eatures and benefits of the Am29F016, which was m anufactured using
0.5 µm process technology.
The standard device of fers access t imes of 70, 90, 120,
and 150 ns, allowing high-speed microprocessors to
operate without wait states. To elim inate bus conten tion, the device has separate c hip enable (CE#), write
enable (WE#), and output enable (OE#) controls.
The device requires only a si ngle 5.0 volt power sup-
ply for both read and w rite functions. Internally generated and regulated voltages are provided for the
program and erase operations.
The device is entirely command set c ompatible with the
JEDEC single-power-supply Flash standard. Commands are written to the command register using standard microprocessor write timings. Register contents
serve as input to an internal state-machine that controls the erase and programming circuitry. Write cycles
also internally latch addresses and data n eeded f o r the
programming and erase operations. Reading data out
of the device is similar to reading from other Flash or
EPROM devices.
Device programming occurs by executing the program
command sequence. This initiates the Embedded
Program algorithm—an internal algorithm that automatically times the program pulse widths and verifies
proper cell margin.
Device erasure occurs by executing the erase command sequence. This initiates the Embedded Erase
algorithm—an inter nal algorithm that automatically
preprograms the array (if it is not already progr ammed)
before e xecutin g the erase operatio n. During erase, t he
device automatically times the erase pulse widths and
verifies proper cell margin.
The host system can detect whether a program or
erase operation is complete by obser ving the RY/BY#
pin, or by reading the DQ7 (Data# Polling) and DQ6
(toggle) status bits. After a program or erase cycle has
been completed, the de vice is ready to read array data
or accept another command.
The sector erase ar chitecture allows memory sectors
to be erased and reprogrammed without affecting the
data contents of other sectors. The device is fully
erased when shipped from the factory.
Hardware data protection measures include a low
V
CC
detector that automatically inhibits write operations during power transitions. The hardware sector
protection feature disables both program and erase
operations in any com bination of the sectors of memory. This can be achie v ed via prog ramming equipment.
The Erase Suspend feature enables the user to put
erase on hold for any period of time to read data from,
or program data to, any sector that is not selected for
erasure. True background erase can thus be achie ved.
The hardware RESET# pin terminates any operation
in progress and resets the internal state machine to
reading array data. The RESET# pin ma y be t ied to the
system reset circuitry. A system reset would thus also
reset the device, enabling the system microprocessor
to read the boot-up firmware from the Flash memory.
The system can place the device into the standby
mode. Power consumption is greatly reduced in
this mode.
AMD’s Flash technology combines years of Flash
memory manufacturing experience to produce the
highest levels of quality, reliability and cost
effectiveness. The device electrically erases all
bits within a sector simultaneously via
Fowler-Nordheim tunneling. The data is
programmed using hot electron injection.
Am29F016B 3
PRELIMINARY
PRODUCT SELECTOR GUIDE
Note: See the AC Characteristics section for more information.
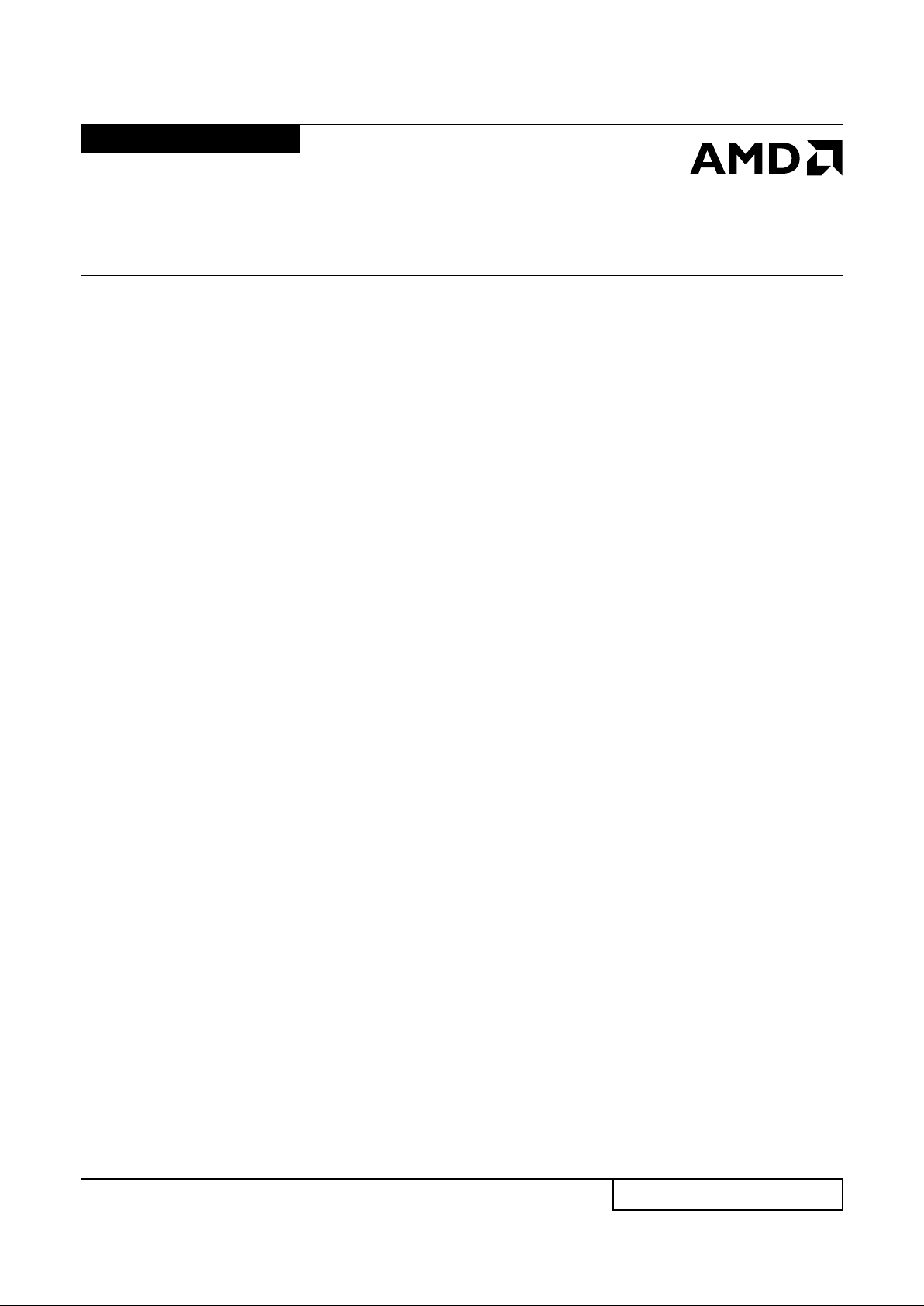
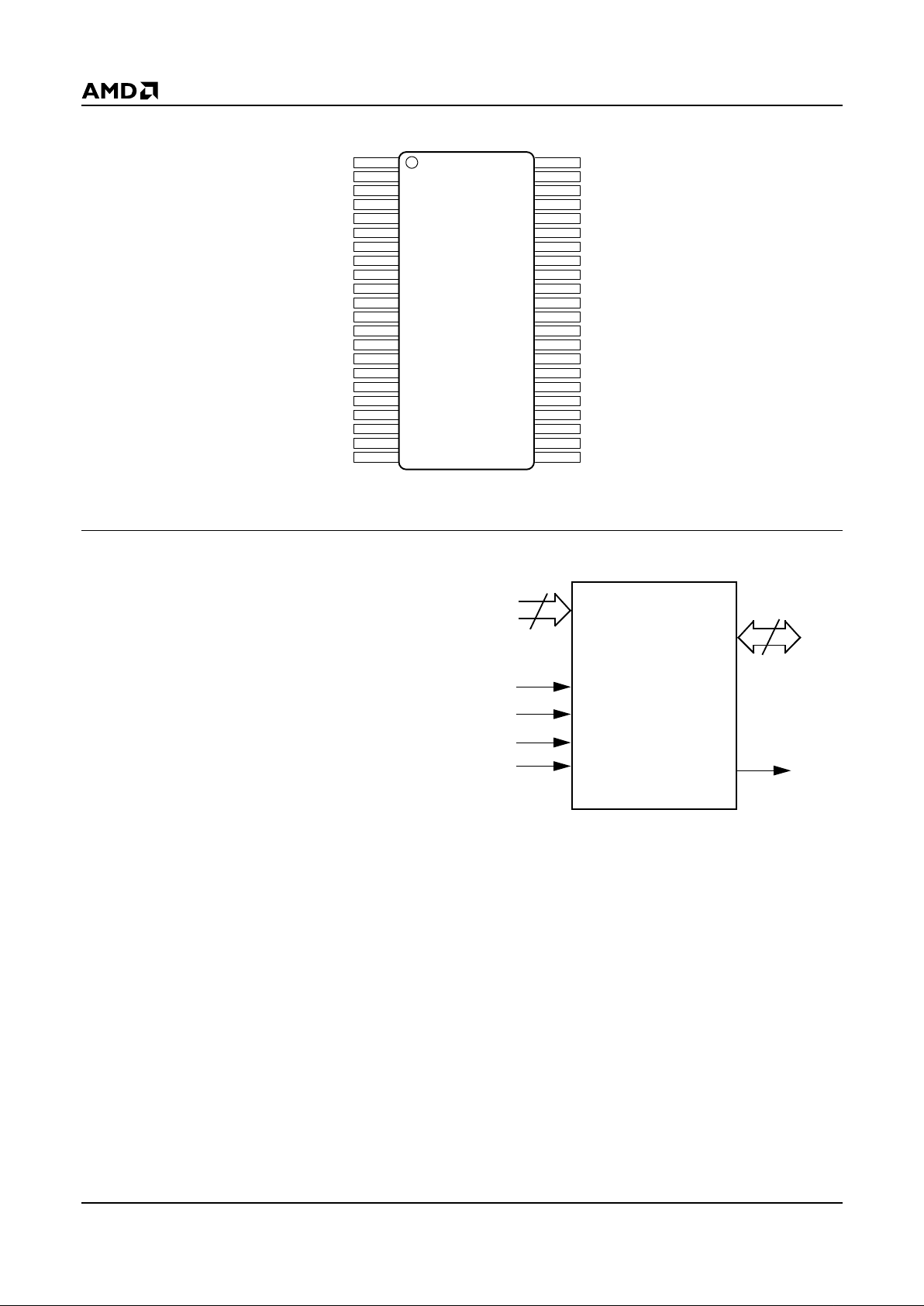
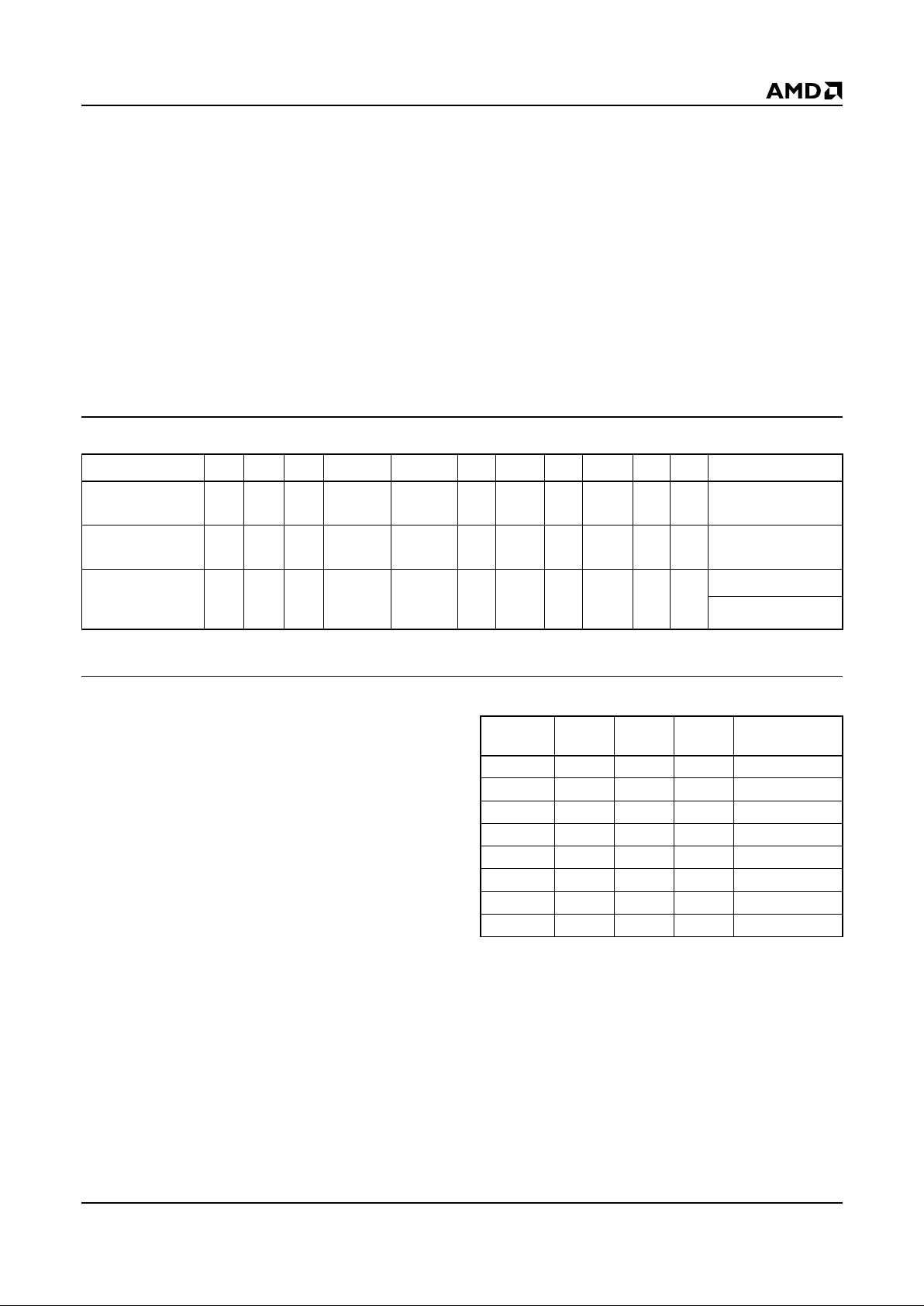
BLOCK DIAGRAM
Family Part Number Am29F016B
Speed Options (V
CC
= 5.0 V ± 10%) -70 -90 -120 -150
Max Access Time (ns) 70 90 120 150
CE# Access (ns) 70 90 120 150
OE# Access (ns) 40 40 50 75
Input/Output
Buffers
X-Decoder
Y-Decoder
Chip Enable
Output Enable
Logic
Erase Voltage
Generator
PGM Voltage
Generator
Timer
VCC Detector
State
Control
Command
Register
V
CC
V
SS
WE#
CE#
OE#
STB
STB
DQ0
–
DQ7
Sector Switches
RY/BY#
RESET#
Data
Latch
Y-Gating
Cell Matrix
Address Latch
A0–A20
21444B-1
4 Am29F016B
PRELIMINARY
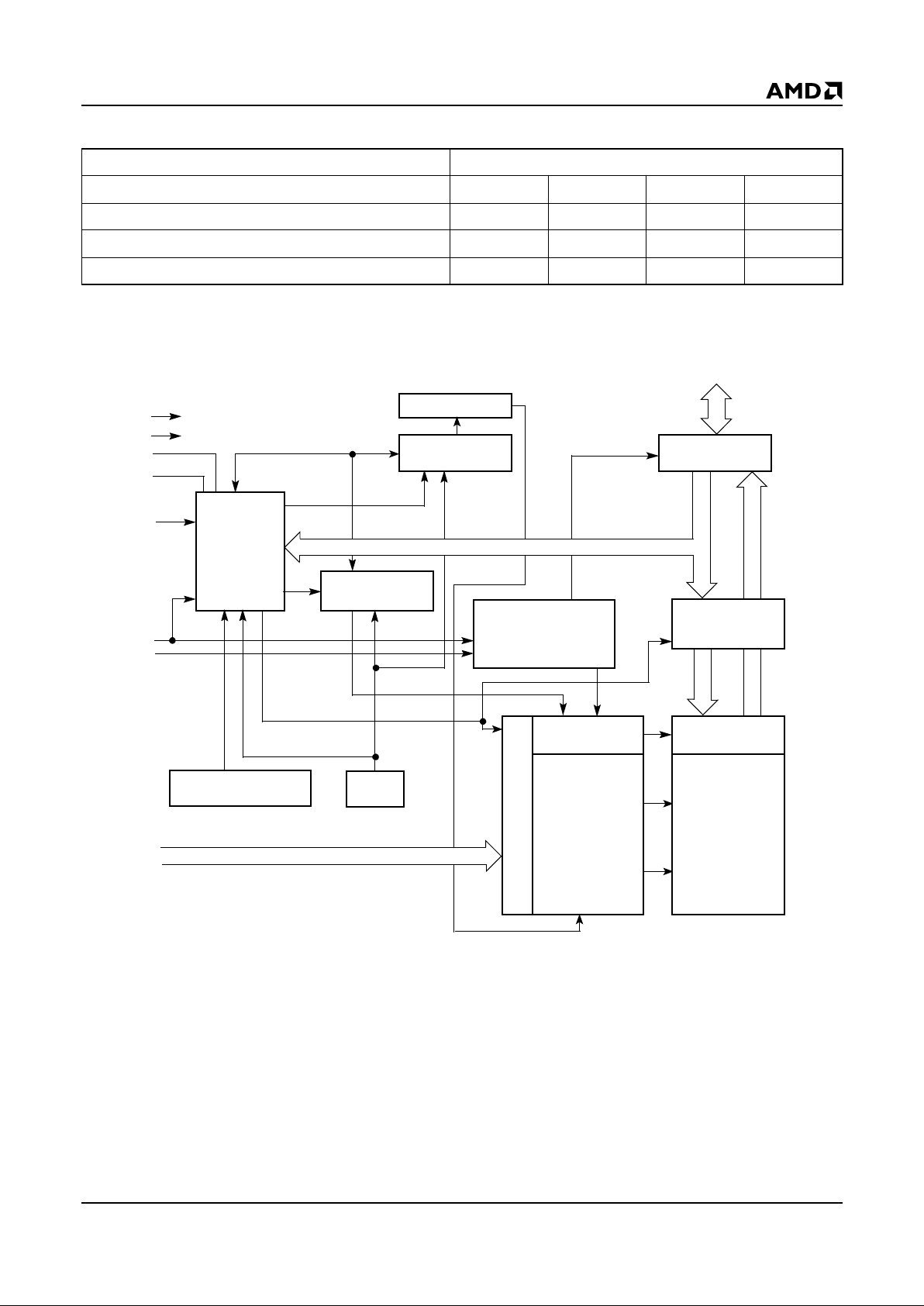
CONNECTION DIAGRAMS
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
A19
A18
A17
A16
A15
A14
A13
A12
CE#
V
CC
NC
RESET#
A11
A10
A9
A8
A7
A6
A5
A4
40
39
38
37
36
35
34
33
32
31
30
29
28
27
26
25
24
23
22
21
A20
NC
WE#
OE#
RY/BY#
DQ7
DQ6
DQ5
DQ4
V
CC
V
SS
V
SS
DQ3
DQ2
DQ1
DQ0
A0
A1
A2
A3
40-Pin Standard TSOP
21444B-2
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
A19
A18
A17
A16
A15
A14
A13
A12
CE#
V
CC
NC
RESET#
A11
A10
A9
A8
A7
A6
A5
A4
40
39
38
37
36
35
34
33
32
31
30
29
28
27
26
25
24
23
22
21
A20
NC
WE#
OE#
RY/BY#
DQ7
DQ6
DQ5
DQ4
V
CC
V
SS
V
SS
DQ3
DQ2
DQ1
DQ0
A0
A1
A2
A3
40-Pin Reverse TSOP
Am29F016B 5
PRELIMINARY
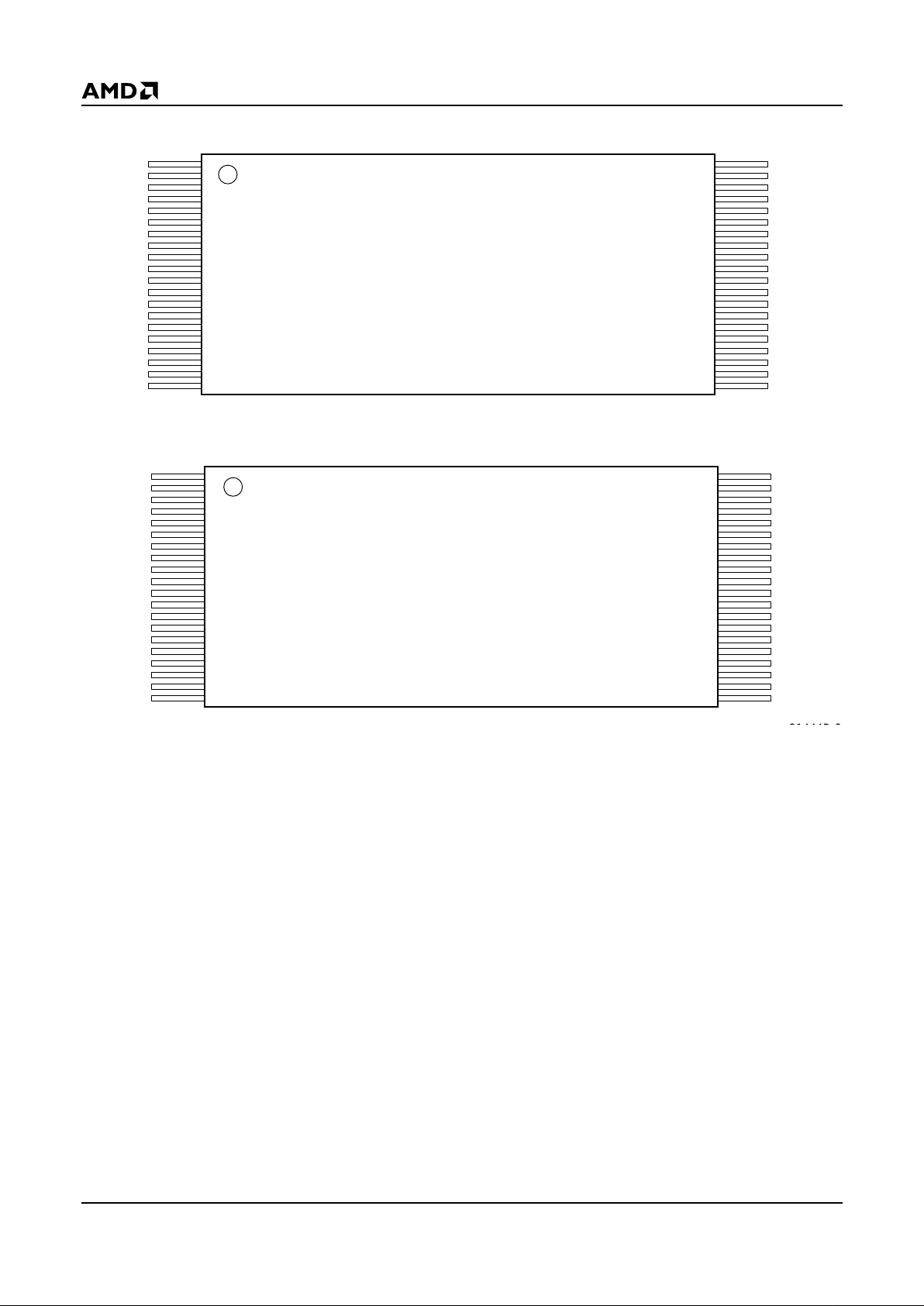
CONNECTION DIAGRAMS (continued)
1
24
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
NC
NC
NC
A19
A18
A17
A16
A15
A14
A13
A12
CE#
V
CC
NC
RESET#
A11
A10
A9
A8
A7
A6
A5
A4
NC
48
25
47
46
45
44
43
42
41
40
39
38
37
36
35
34
33
32
31
30
29
28
27
26
NC
NC
NC
A20
NC
WE#
OE#
RY/BY#
DQ7
DQ6
DQ5
DQ4
V
CC
V
SS
V
SS
DQ3
DQ2
DQ1
DQ0
A0
A1
A2
A3
NC
48-Pin Standard TSOP
21444B-4
1
24
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
NC
NC
NC
A20
NC
WE#
OE#
RY/BY#
DQ7
DQ6
DQ5
DQ4
V
CC
V
SS
V
SS
DQ3
DQ2
DQ1
DQ0
A0
A1
A2
A3
NC
48
25
47
46
45
44
43
42
41
40
39
38
37
36
35
34
33
32
31
30
29
28
27
26
NC
NC
NC
A19
A18
A17
A16
A15
A14
A13
A12
CE#
V
CC
NC
RESET#
A11
A10
A9
A8
A7
A6
A5
A4
NC
48-Pin Reverse TSOP
21444B-5
6 Am29F016B
PRELIMINARY
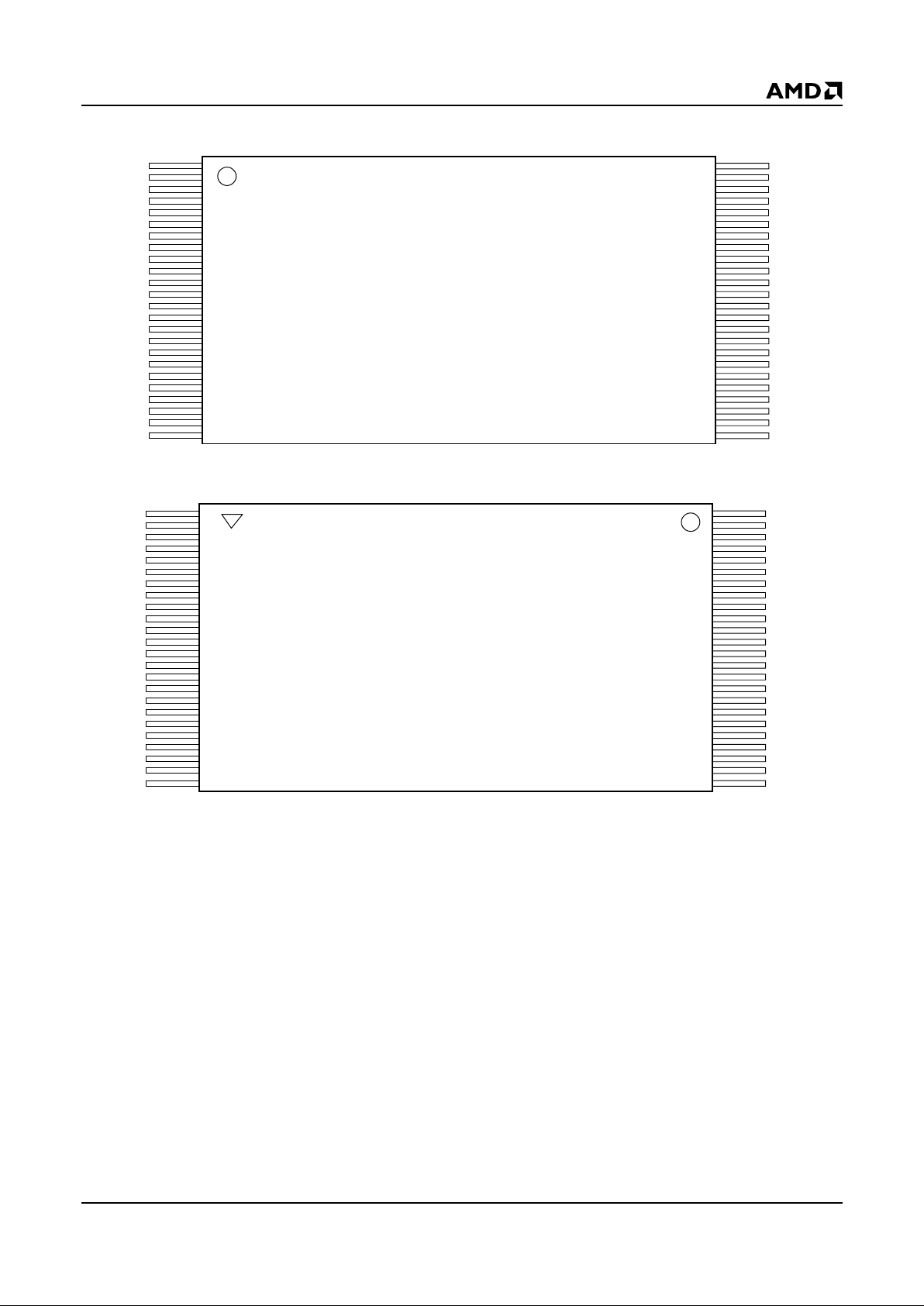
CONNECTION DIAGRAMS
PIN CONFIGURATION
A0–A20 = 21 Addresses
DQ0–DQ7 = 8 Data Inputs/Outputs
CE# = Chip Enable
WE# = Write Enable
OE# = Output Enable
RESET# = Hardware Reset Pin, Active Low
RY/BY# = Ready/Busy Output
V
CC
= +5.0 V single power supply
(see Product Selector Guide for
device speed ratings and voltage
supply tolerances)
V
SS
= Device Ground
NC = Pin Not Connected Internally
LOGIC SYMBOL
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
NC
RESET#
A11
A10
A9
A8
A7
A6
A5
A4
NC
NC
A3
A2
A1
A0
DQ0
DQ1
DQ2
DQ3
V
SS
V
SS
44
43
42
41
40
39
38
37
36
35
34
33
32
31
30
29
28
27
26
25
24
23
V
CC
CE#
A12
A13
A14
A15
A16
A17
A18
A19
NC
NC
A20
NC
WE#
OE#
RY/BY#
DQ7
DQ6
DQ5
DQ4
V
CC
SO
21444B-6
21
8
DQ0–DQ7
A0–A20
CE#
OE#
WE#
RESET# RY/BY#
21444B-7
Am29F016B 7
PRELIMINARY
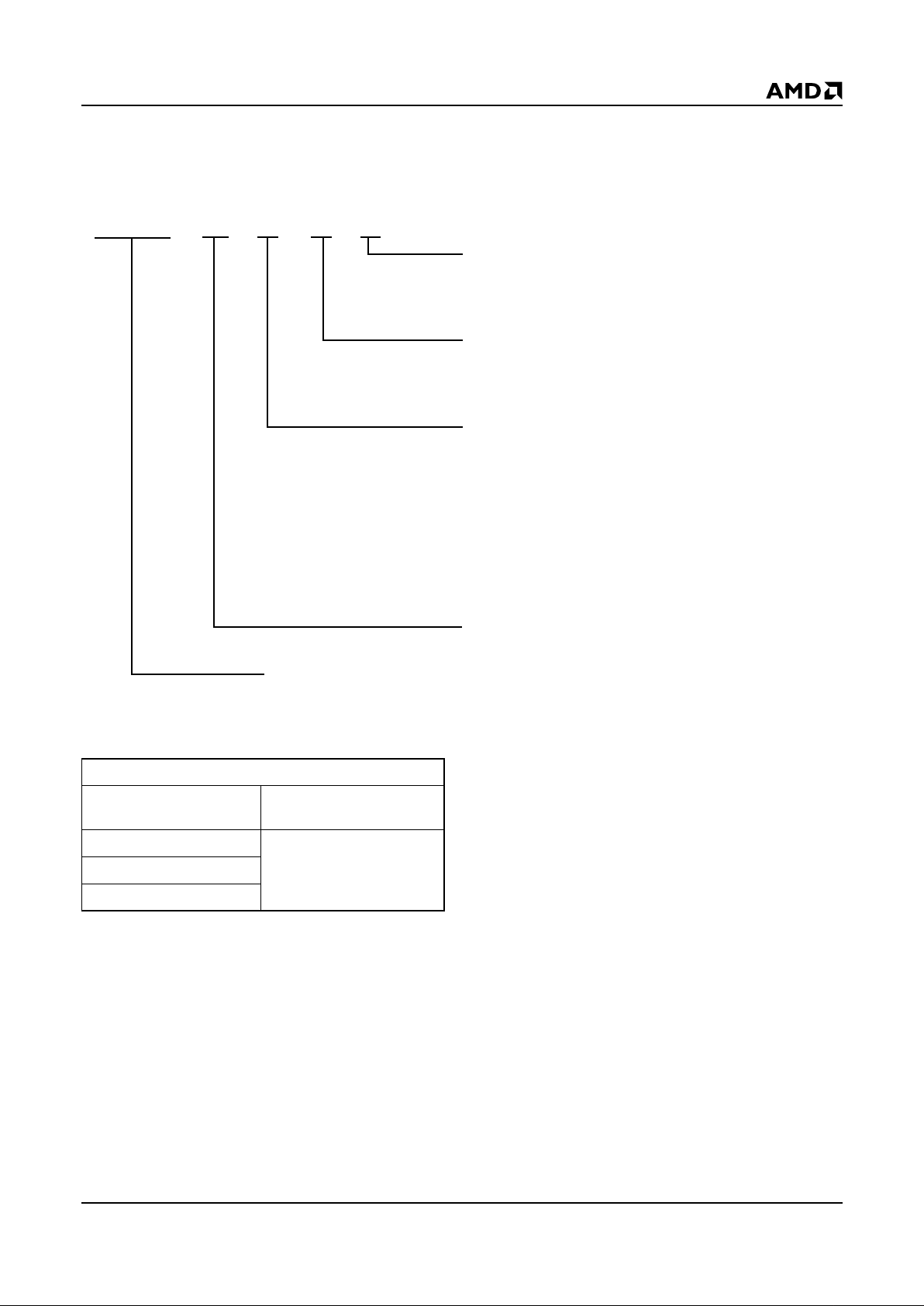
ORDERING INFORMATION
Standard Pr od ucts
AMD standard products are available in several packages and operating ranges. The order number (Valid Combination) is
formed by a combination of the following:
Valid Combinations
Valid Combinations list configurations planned to be supported in volume for this device. Cons ult the loc al AM D sale s office to confirm availab ility of specific valid combinations and
to check on newly released combinations.
DEVICE NUMBER/DE SCR IP TIO N
Am29F016B
16 Megabit (2 M x 8-Bit) CMOS 5.0 Volt-only Sec tor Era se Flash Mem or y
5.0 V Read, Program, and Erase
Am29F016B -70 E I
OPTIONAL PROCESSING
Blank = Standard Processing
B = Burn-in
(Contact an AMD representative for more information)
TEMPERATURE RANGE
C=Commercial (0°C to +70°C)
I = Industrial (–40 °C to +85 °C)
E = Extended (–55°C to +125°C)
PACKAGE TYPE
E = 48-Pin Thin Small Outline Package
(TSOP) Standard Pinout (TS 048)
F = 48-Pin Thin Small Outline Package
(TSOP) Reverse Pinout (TSR048)
E4 = 40-Pin Thin Small Outline Package
(TSOP) Standard Pinout (TS 040)
F4 = 40-Pin Thin Small Outline Package
(TSOP) Reverse Pinout (TS R0 40)
S = 44-Pin Small Outline Package (SO 044)
SPEED OPTION
See Product Selector Guide and Valid Combinations
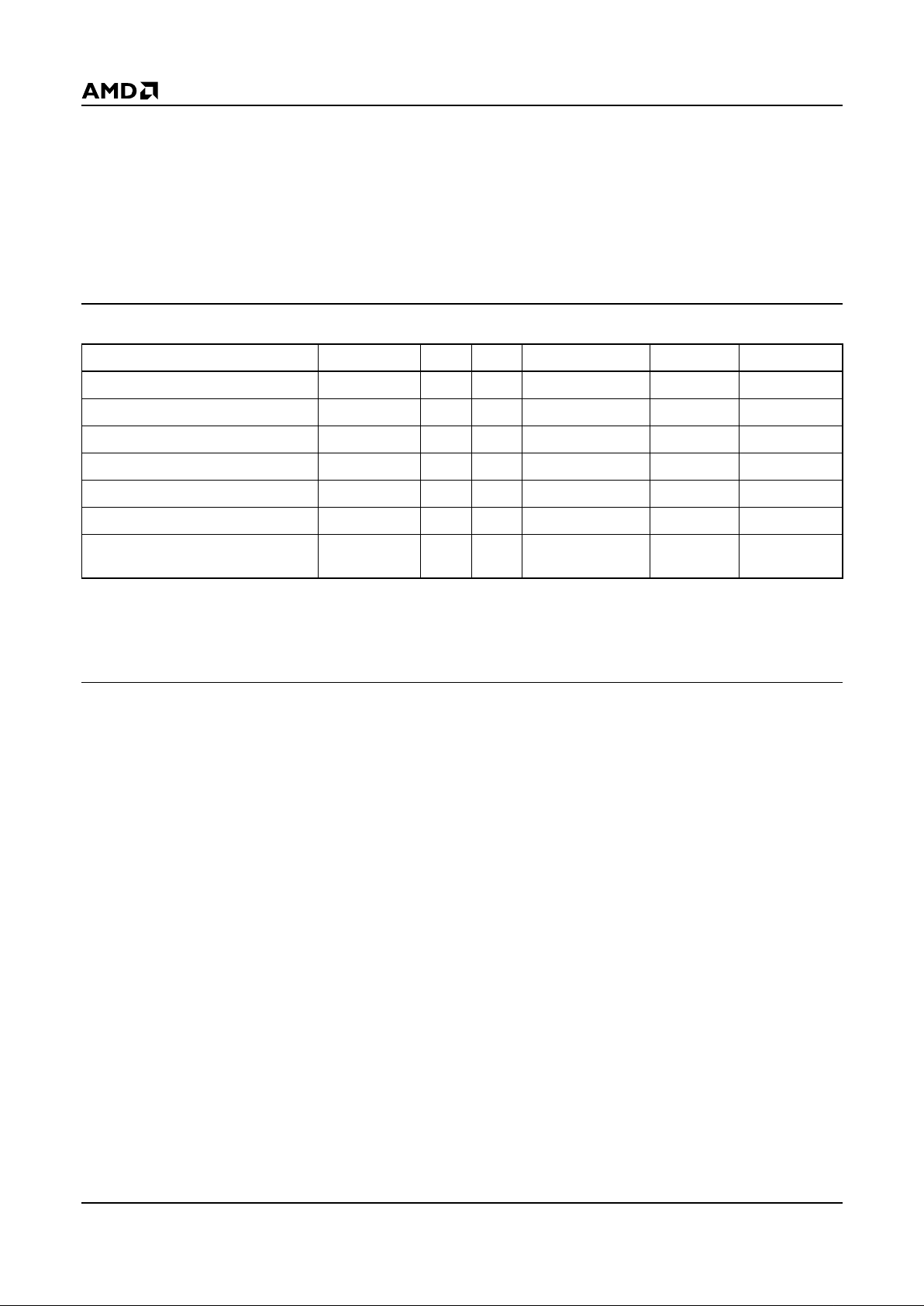
Valid Combinations
Am29F016B-70
EC, EI, FC, FI,
E4C, E4I, F4C, F4I, SC, SI
Am29F016B-90
EC, EI, EE, FC, FI, FE
E4C, E4I, E4E, F4C, F4I,
F4E, SC, SI, SE
Am29F016B-120
Am29F016B-150
8 Am29F016B
PRELIMINARY
DEVICE BUS OPERATIONS
This section describes the requirements and use of the
device bus operations, which are initiated through the
internal c ommand register. The command register itself does not occupy any addressable memory location. The register is composed of l atches that store the
commands, along with the address and data information needed to execute the command. The contents of
the register serve as inputs to the internal state machine. The state machine outputs dictate the function of
the device. The appropriate device bus operations
table lists the inputs and control le vels requ ired, and the
resulting output. The following subsections describe
each of these operations in further detail.
Table 1. Am29F016B Device Bus Operations
Legend:
L = Logic Low = V
IL
, H = Logic High = VIH, VID = 12.0 ± 0.5 V, X = Don’t Care, DIN = Data In, D
OUT
= Data Out, AIN = Address In
Note:
See the sections on Sector Protection and Temporary Sector Unprotect for more information.
Requirements for Reading Array Data
To read array data from the outputs, the system must
drive the CE# and OE# pins to V
IL
. CE# is the power
control and selects the device. OE# is the output control
and gates array data to the output pins. WE# should remain at V
IH
.
The internal state machin e is set for reading array
data upon device power-up, or after a hardware reset.
This ensures that no spurious alteration of the memory content occurs during the power transition. No
command is necessar y in this mode to obtain array
data. Standard microprocessor read cycles that assert valid addresses on the device address inputs
produce valid data on the device data outputs. The
device remains enable d for read access until the
command register contents are altered.
See “Reading Array Data” for more information. Refer
to the AC Read Operations table for timing specifications and to the Read Operations Timings diagram for
the timing waveforms. I
CC1
in the DC Characteristics
table represents the active current specification for
reading array data.
Writing Commands/Command Sequences
To write a command or command sequence (which includes programming data to the device and erasing
sectors of memory), the system must drive WE# and
CE# to V
IL
, and OE# to VIH.
An erase operation can erase one sect or, multiple sectors, or the entire de vice. The Sector Address Tables indicate the address space that each sector occupies. A
“sector address” consists of the address bits required
to uniquely select a sector. See the “Command Definitions” section for details on erasing a sector or the entire chip, or suspending/resuming the erase operation.
After the system writes the autoselect command sequence, the device enters the autoselect mode. The
system can then read autoselect codes from the internal register (which is separate from the memory array)
on DQ7–DQ0. Standard read cycle timings apply in this
mode. Refer to the “Autoselect Mode” and “Autoselect
Command Sequence” sections for more information.
I
CC2
in the DC Characteristics table represents the active current specification for the write mode. The “AC
Characteristics” section contains timing specification
tables and timing diagrams for write operations.
Operation CE# OE# WE# RESET# A0–A20 DQ0–DQ7
Read L L H H A
IN
D
OUT
Write L H L H A
IN
D
IN
CMOS Standby VCC ± 0.5 V X X VCC ± 0.5 V X High-Z
TTL Standby H X X H X High-Z
Output Disable L H H H X High-Z
Hardware Reset X X X L X High-Z
Temporary Sector Unprotect
(See Note)
XXX V
ID
A
IN
D
IN

Am29F016B 9
PRELIMINARY
Program and Erase Operation Status
During an erase or program operation, the system ma y
check the status of the operation by reading the status
bits on DQ7–DQ0. Standard read cycle timings and I
CC
read specifications apply. Refer to “Write Operation
Status” for more infor mation, and to each AC Characteristics section for timing diagrams.
Standby Mode
When the system is not reading or writing to the device ,
it can place the device in the standby mode. In this
mode, current consumption is great ly reduc ed, and the
outputs are placed in the high impedance state, independent of the OE# input.
The device enters the CMOS standby mode when CE#
and RESET# pins are both held at V
CC
± 0.5 V. (Note
that this is a more restrict ed voltage range than V
IH
.)
The device enters the TTL standby mode when CE#
and RESET# pins are both held at V
IH
. The device requires standard access time (tCE) for read access when
the device is in either of these standb y modes, bef ore it
is ready to read data.
The device also enters the standb y mode when the RESET# pin is driven low. Refer to the next section, “RESET#: Hardware Reset Pin”.
If the device is deselected during erasure or program ming, the device draws active current until the
operation is completed.
In the DC Charac teristics tables, I
CC3
represents the
standby current specification.
RESET#: Hardware Reset Pin
The RESET# pin provides a har dware method of resetting the device to readi ng arr ay data. When the system
drives the RESET# pin low for at least a period of t
RP
,
the device immediately terminates any operation in
progress, tristates all data output pins, and ignores all
read/write attempts for the duration o f the RESET#
pulse. The device also resets the inter nal state machine to reading array data. The operation that was interrupted should be reinitiated once the device is ready
to accept another command sequence, to ensure data
integrity.
Current is reduced for the duration of the RESET#
pulse. When RESET# is held at V
IL
, the device enters
the TTL standby mode; if RESET# is held at V
SS
±
0.5 V, the device enters the CMOS standby mode.
The RESET# pin may be tied to the system reset cir-
cuitry. A system reset would thus also reset the Flash
memory, enabling the system to read the boot-up firmware from the Flash memory.
If RESET# is asserted during a program or erase operation, the RY/BY# pin remains a “0” (busy) until the internal reset operatio n is complete, which requires a
time of t
READY
(during Embedded Algorithms). The
system can thus monitor RY/BY# to determine whether
the reset operation is complete. If RESET# is asserted
when a program or erase operation is not executing
(RY/BY# pin is “1”), the reset operation is completed
within a time of t
READY
(not during Embe dded Algo-
rithms). The system can read data t
RH
after the RE-
SET# pin returns to V
IH
.
Refer to the AC Characteristics tables for RESET# parameters and timing diagram.
Output Disable Mode
When the OE# input is at VIH, output from the device is
disabled. The output pins are placed in t he high impedance state.
10 Am29F016B
PRELIMINARY
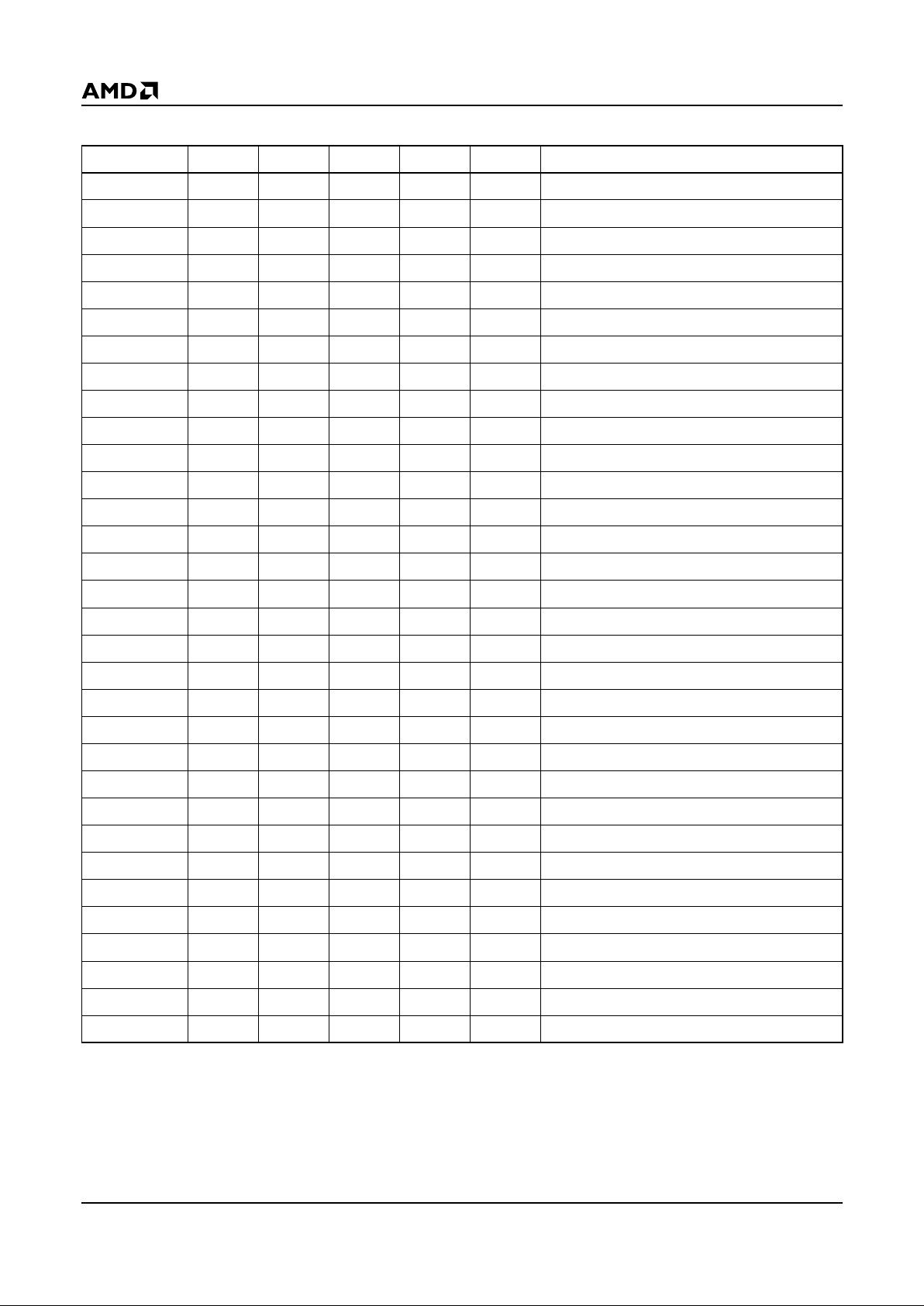
Table 2. Sector Address Table
Note: All sectors are 64 Kbytes in size.
Sector A20 A19 A18 A17 A16 Address Range
SA0 0 0 0 0 0 000000h-00FFFFh
SA1 0 0 0 0 1 010000h-01FFFFh
SA2 0 0 0 1 0 020000h-02FFFFh
SA3 0 0 0 1 1 030000h-03FFFFh
SA4 0 0 1 0 0 040000h-04FFFFh
SA5 0 0 1 0 1 050000h-05FFFFh
SA6 0 0 1 1 0 060000h-06FFFFh
SA7 0 0 1 1 1 070000h-07FFFFh
SA8 0 1 0 0 0 080000h-08FFFFh
SA9 0 1 0 0 1 090000h-09FFFFh
SA10 0 1 0 1 0 0A0000h-0AFFFFh
SA11 0 1 0 1 1 0B0000h-0BFFFFh
SA12 0 1 1 0 0 0C0000h-0CFFFFh
SA13 0 1 1 0 1 0D0000h-0DFFFFh
SA14 0 1 1 1 0 0E0000h-0EFFFFh
SA15 0 1 1 1 1 0F0000h-0FFFFFh
SA16 1 0 0 0 0 100000h-10FFFFh
SA17 1 0 0 0 1 110000h-11FFFFh
SA18 1 0 0 1 0 120000h-12FFFFh
SA19 1 0 0 1 1 130000h-13FFFFh
SA20 1 0 1 0 0 140000h-14FFFFh
SA21 1 0 1 0 1 150000h-15FFFFh
SA22 1 0 1 1 0 160000h-16FFFFh
SA23 1 0 1 1 1 170000h-17FFFFh
SA24 1 1 0 0 0 180000h-18FFFFh
SA25 1 1 0 0 1 190000h-19FFFFh
SA26 1 1 0 1 0 1A0000h-1AFFFFh
SA27 1 1 0 1 1 1B0000h-1BFFFFh
SA28 1 1 1 0 0 1C0000h-1CFFFFh
SA29 1 1 1 0 1 1D0000h-1DFFFFh
SA30 1 1 1 1 0 1E0000h-1EFFFFh
SA31 1 1 1 1 1 1F0000h-1FFFFFh
Am29F016B 11
PRELIMINARY
Autoselect Mode
The autoselect mode provides manufacturer and device identification, and sector protection verification,
through identifier codes output on DQ7–DQ0. This
mode is primarily intended for progr amming equipment
to automatically match a device to be progr ammed with
its correspondi ng programming al gorithm. However,
the autoselect codes can also be accessed in-system
through the command register.
When using programming equipment, the autoselect
mode requires V
ID
(11.5 V to 12.5 V) on address pin
A9. Address pins A6, A1, and A0 must be as shown in
Autoselect Codes (High Voltage Method) table. I n addition, when verifying sector protection, the sector ad-
dress must appear on the appropriate highest order
address bits. Refer to the corresponding Sector Address Tables. The Comm and Definitions table shows
the remaining address bits that are don’t c are. When all
necessary bits have been set as required, the programming equipment may then read the corresponding
identifier code on DQ7–DQ0.
To access the autoselect codes in-system, the host
system can issue the autoselect command via the
command register, as shown in the C ommand Definitions table. This method does not require V
ID
. See
“Command Definitions” for details on using the autoselect mode.
Table 3. Am29F016B Autoselect Codes (High Voltage Method)
L = Logic Low = VIL, H = Logic High = VIH, SA = Sector Address, X = Don’t care.
Sector Group Protection/Unprotection
The hardware sector group protection feature disables both program and erase operations in any sector gr o u p. Each sector group consists of four adjacent
sectors. Table 4 shows how the sectors are grouped,
and the address range that each sector group contains. The hardware sector group unprotection feature re-enables both program and erase operations in
previously protected sector groups.
Sector group protection/unprotection must be implemented using programming equipment. The procedure
requires a high voltage (V
ID
) on address pin A9 and the
control pins. Details on this method are provided in a
supplement, publication number 19613. Contact an
AMD representative to obtain a cop y of the appropriate
document.
The device is shipped with all sector grou ps unprotected. AMD offers t he optio n of prog r amming a nd protecting sector groups at its factory prior to shipping the
device through AMD’s ExpressFlash™ Service. Contact an AMD representative for details.
It is possible to determine whether a sector group is
protected or unprotected. See “Autoselect Mode” for
details.
Table 4. Sector Group Addresses
Temporary Sector Group Unprotect
This feature allows temporary unprotection of previously protected sector groups to change data in-system. The Sector Group Unprotect mode is activated
by setting the RESET# pin to V
ID
. During this mode,
formerly protected sector g roups can be programmed
or erased by selecting the sector group addresses.
Once V
ID
is removed from the RESET# pin, all the
previously protected sector groups are
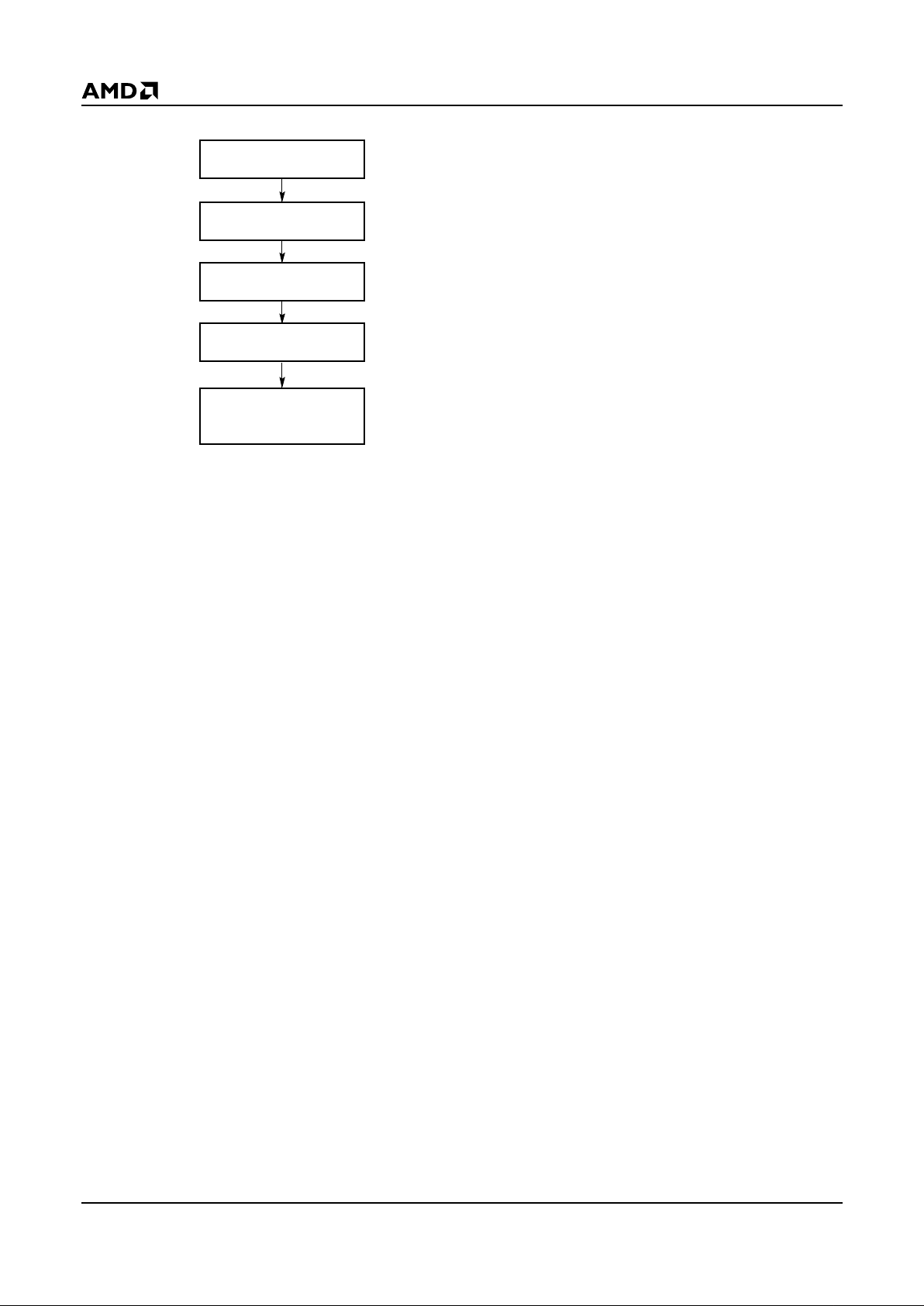
protected again. Figure 1 shows the algorithm, and
the Temporary Sector Group Unprotect diagram (Figure 16) shows the timing waveforms, for this feature.
Description CE# OE# WE# A20-A18 A17-A10 A9 A8-A7 A6 A5-A2 A1 A0 DQ7-DQ0
Manufacturer ID:
AMD
LLH X X V
ID
XVILXVILV
IL
01h
Device ID:
Am29F016B
LLH X X VIDXVILXVILV
IH
ADh
Sector Group
Protection
Ve r ific atio n
LLH
Sector
Group
Address
XVIDXVILXVIHV
IL
01h (protected)
00h (unprotected)
Sector
Group A20 A19 A18 Sectors
SGA0 0 0 0 SA0
–
SA3
SGA1 0 0 1 SA4
–
SA7
SGA2 0 1 0 SA8
–
SA11
SGA3 0 1 1 SA12
–
SA15
SGA4 1 0 0 SA16
–
SA19
SGA5 1 0 1 SA20
–
SA23
SGA6 1 1 0 SA24
–
SA27
SGA7 1 1 1 SA28
–
SA31
12 Am29F016B
PRELIMINARY
Figure 1. Temporary Sector Group Unprotect
Operation
Hardware Data Protection
The command sequence requirement of unlock cycles
for programming or erasing provides data protection
against inadvertent writes (refer to the Command Definitions table). In addition, the following hardware data
protection measures pre vent a ccidental eras ure or programming, which might otherwise be caused by spurious system level signals during V
CC
power-up and
power-down transitions, or from system noise.
Low V
CC
Write Inhibit
When V
CC
is less than V
LKO
, the device does not ac-
cept any write cycles. This protects data during V
CC
power-up and power-down. The command register and
all internal program/erase circuits are disabled, and the
device resets. Subsequent writes are ignored until V
CC
is greater than V
LKO
. The system must provide the
proper signals to the control pins to prevent unintentional writes when V
CC
is greater than V
LKO
.
Write Pulse “Glitch” Protection
Noise pulses of less than 5 ns (typical) on OE#, CE# or
WE# do not initiate a write cycle.
Logical Inhibit
Write cycles are inhibited by holding any one of OE#
= V
IL
, CE# = VIH or WE# = VIH. To initiate a write cycle, CE# and WE# must be a logical zero while OE#
is a logical one.
Power-Up Write Inhibit
If WE# = CE# = V
IL
and OE# = VIH during powe r
up, the device does not accept commands on the
rising edge of WE#. The inter nal state machine is
automatically reset to reading array data on
power-up.
START
Perform Erase or
Program Operations
RESET# = V
IH
Temporary
Sector Group Unprotect
Completed (Note 2)
RESET# = V
ID
(Note 1)
Notes:
1. All protected sector groups unprotected.
2. All previously protected sector groups are protected
once again.
21444B-8

Am29F016B 13
PRELIMINARY
COMMAND DEFINITIONS
Writing specific addre ss and data commands or sequences into the command register initiates device operations. The Command Definitions table defines the
valid register command sequences. Writing incorrect
address and data values or writing them in the im-
proper sequence resets the device to reading array
data.
All addresses are latched on the falling edge of WE# or
CE#, whichever happens later. All data is latched on
the rising edge of WE# or CE#, whichever happens
first. Refer to the appropriate timing diagrams in the
“AC Characteristics” section.
Reading Array Data
The device is automatically set to reading array data
after device power-up. No commands are required to
retrieve data. The device is also ready to read array
data after comp leting an Embe dded Program or Embedded Erase algorithm.
After the device accepts an Er ase Suspend command,
the device enters the Erase Suspend m ode. The system can read array data using the standard read timings, except that if it reads at an address within erasesuspended sectors, the device outputs status data.
After completing a programming operation in the Erase
Suspend mode, the system may once agai n read arra y
data with the same ex ception. See “Erase Suspend/
Erase Resume Commands” for more information on
this mode.
The system
must
issue the reset command to re-enable the dev ice f or reading arra y data if DQ5 goes high,
or while in the autoselect mode. See the “Reset Command” section, next.
See also “Requirements for Reading Arr a y Data” in the
“Device Bus Operations” section for more information.
The Read Operations table provides the read parameters, and Read Operation Tim ings diagram shows the
timing diagram.
Reset Command
Writing the reset command to the devi ce resets the device to reading array data. Address bits are don’t care
for this command.
The reset command may be written between the sequence cycles in an erase command sequence before
erasing begins. This resets the device to reading array
data. Once erasure begins, however, the device ignores reset commands until the operation is complete.
The reset command may be written between the sequence cycles in a program command sequence before programming begins. This resets the device to
reading array data (also applies to programming in
Erase Suspend mode). Once programming begins,
however, the device ignores reset commands until the
operation is complete.
The reset command may be written between the sequence cycles in an autoselect command sequence.
Once in the autoselect mode, t he reset c ommand
must
be written to return to reading array data (also applies
to autoselect during Erase Suspend).
If DQ5 goes high during a program or erase operation,
writing the reset command returns the device to reading array data (also applies during Erase Suspend).
Autoselect Command Sequence
The autoselect c ommand sequenc e allows the host
system to access the manufacturer and devices codes ,
and determine whether or not a sector is protected.
The Command Definitions table shows the address
and data requirements. This method is an a lternative to
that shown in the Autoselect Codes (High Voltage
Method) table, which is in tended for PROM programmers and requires V
ID
on address bit A9.
The autoselect command sequence is initiated by
writing two unlock cycles, followed by the autoselect
command. The device then en ters the autoselect
mode, and the system may read at any address any
number of times, without initiating another command
sequence.
A read cycle at address XX00h retrieves the manufacturer code. A read cycle at address XX01h returns the
device code. A read cycle containing a sector address
(SA) and the address 02h in returns 01h if that sector
is protected, or 00h if it is unprotected. Refer to the
Sector Ad dr e ss ta bles for valid sector addres s es.
The system must write the reset command to exit the
autoselect mode and return to reading array data.
Byte Program Command Sequence
Programming is a four-bus-cycle operation. The program command sequence is initiated by writing two unlock write cycles, followed by the program set-up
command. The program address and data are wr itten
next, which in turn initiate the Embedded Program algorithm. The system is
not
required to provide further
controls or timings. The device automatically provides
internally generated program pulses and v erify the programmed cell margin. The Command Definitions take
shows the address and data requirements for the byte
program command sequence.
When the Embedded Program algorithm is complete,
the device then returns to reading array data and addresses are no longer latched. The system can determine the status of the program operation b y using DQ7,

14 Am29F016B
PRELIMINARY
DQ6, or RY/BY#. See “Write Operation Status” for information on these status bits.
Any commands written to the device dur ing the Embedded Program Algorithm are ignored. Note that a
hardware reset immediately terminates the programming operation. The program command sequenc e
should be reinitiated once the de vi ce has reset t o reading array data, to ensure data integrity.
Programming is allowed in any sequence an d across
sector boundaries. A bit cannot be programmed
from a “0” back to a “1”. Attempting to do so may halt
the operation and set DQ5 to “1”, or cause the Data#
Polling algorithm to indicate the op eration was successful. However, a succeeding read will show that the
data is still “0”. Only erase operations can convert a “0”
to a “1”.
Note: See the appropriate Command Definitions table for
program command sequence.
Figure 2. Program Operation
Chip Erase Command Sequence
Chip erase is a six-bus-cycle operation. The chip erase
command sequence is initiated by writing two unlock
cycles, followed by a set-up command. Two additional
unlock write cycles are then followed by the chip erase
command, which in turn invokes the Embedded Erase
algorithm. The device does
not
require the system to
preprogram prior to erase. The Embedded Erase algorithm automatically preprograms and verifies the entire
memory for an all zero data patter n prior to electr ical
erase. The system is not required to provide any controls or timings during these operations. The Command
Definitions table show s the address and data requirements for the chip erase command sequence.
Any commands written to the chip during the Embedded Erase algorithm are ignored. Note that a ha rd ware
reset during the chip erase operation immediately terminates the operation. The Chip Erase command sequence should be reinitiated once the device has
returned to reading array data, to ensure data int eg rity.
The system can deter mine the status of the erase
operation by using DQ7, DQ6, DQ2, or RY/BY#. See
“Write Operation Status” for information on these
status bits. When the Embedded Erase algorithm is
complete, the device returns to reading array data
and addresses are no long er latched.
Figure 3 illustrates the algorithm for the erase operation. See the Erase/Program Operations tables in “AC
Characteristics” for p arameters , and to the Chip/Sector
Erase Operation Timings for t i ming waveforms.
Sector Erase Command Sequence
Sector erase is a six bus cycle operation. The sector
erase command sequence is initiated by writing two unlock cycles, followed by a set-up command. Two additional unlock write cycles are then followed by the
address of the sector to be erased, and the sector
erase command . The Command Definitions table
shows the address and data requirement s for the sector erase command sequence.
The device does
not
require the system to preprogram
the memory prior to erase. The Embedded Erase algorithm automatically programs and verifies the s ector for
an all zero data pattern prior to electrical erase. The
system is not required to provide a ny controls or timings during these operations.
After the command sequence is written, a sector erase
time-out of 50 µs begins. During the time-out period,
additional sector addresses and sector erase commands may be written. Loading the sector erase buffer
may be done in any sequence, and the number of sectors may be from one sector to all sector s. The time between these additional cycl es must be less than 50 µs,
otherwise the last address and command might not be
accepted, and erasure may begin. It is recommended
that processor interrupts be disab led during this time to
ensure all commands are accepted. The interrupts can
be re-enabled after the last Sector Erase command is
START
Write Program
Command Sequence
Data Poll
from System
Verify Data?
No
Yes
Last Address?
No
Yes
Programming
Completed
Increment Address
Embedded
Program
algorithm
in progress
21444B-9

Am29F016B 15
PRELIMINARY
written. If the time between additional sector erase
commands can be assumed to be less than 50 µs, the
system need not monitor DQ3. Any command other
than Sector Erase or Erase Suspend during the
time-out period resets the device to reading array
data. The system must rewrite the command sequence
and any additional sector addresses and commands.
The system can monitor DQ3 to determine if the sector
erase timer has timed out. (See the “DQ3: Sec tor Erase
Timer” section.) The time-out be gins from the rising
edge of the final WE# pulse in the command sequence .
Once the sector erase operation has begun, onl y the
Erase Suspend command is valid. All other commands
are ignored. Note th at a hardware reset during the
sector erase operation immediately ter m inates the operation. The Sector Erase command sequence s hould
be reinitiated once the device has returned to reading
array data, to ensure data integrity.
When the Embedded Erase algorithm is complete, the
device returns to reading arra y data and addresses are
no longer latched. The system can determine the status of the erase operation b y usi ng DQ7, DQ6, DQ2, or
RY/BY#. Refer to “Write Operation Status” for information on these status bits.
Figure 3 illustrates the algorithm for the erase operation. Refer to the Erase/Program Operations tables in
the “AC Characteristics” section f or par amet ers , and to
the Sector Erase Operations Ti ming diagr am for timing
waveforms.
Erase Suspend/Erase Resume Commands
The Erase Suspend command allows the s yst em to interrupt a sector erase operation and then read data
from, or program data to, any sector not selected for
erasure. This command is valid only dur ing the sector
erase operation, including the 50 µs time-out period
during the sector erase command sequence. The
Erase Suspend comm and is ignored if written dur ing
the chip erase operation or Embedded Program algorithm. Writing the Erase Suspend command during the
Sector Erase time-out immediately ter minates the
time-out period and suspends the er ase oper at ion. Ad-
dresses are “don’t-cares” when writing the Erase Suspend command.
When the Erase Suspend command is written during a
sector erase operation, the de vice requires a maximum
of 20 µs to suspend the erase operation. However,
when the Erase Suspend command is written during
the sector erase time-out, the device immediately terminates the time-out period and suspends the erase
operation.
After the erase operation has been suspended, the
system can read array data from or program data to
any sector not selected for erasu re. (The de vice “er ase
suspends” all sectors selected for erasure.) Normal
read and write timings and command definitions apply.
Reading at any address within erase-suspended sectors produces status data on DQ7–DQ0. The system
can use DQ7, or DQ6 and DQ2 together, to determine
if a sector is actively erasing or is erase-suspended.
See “Write Operation Status” for information on these
status bits.
After an erase-suspended program operation is complete, the system c an once again r ead arra y d ata within
non-suspended sectors. The system can determine
the status of the program operation using the DQ7 or
DQ6 status bits, just as in the standard program operation. See “Write Operation Status” for more information.
The system may also write the autos elect command
sequence when the device is in the Erase Suspend
mode. The device allows reading autoselect codes
even at addresses within erasing sectors, since the
codes are not stored in the memory array. When the
device exits the autoselect mode, the device reverts to
the Erase Suspend mode, and is ready for another
valid operation. See “Autoselect Command Sequence”
for more information.
The system must write the Erase Resume command
(address bits are “don’t care”) to exit the erase suspend
mode and continue the sector erase operati on. Further
writes of the Resume command are ignored. Another
Erase Suspend command can be written after the device has resumed erasing.

16 Am29F016B
PRELIMINARY
Notes:
1. See the appropriate Command Definitions table for erase
command sequence.
2. See “DQ3: Sector Erase Timer” for more information.
Figure 3. Erase Operation
START
Write Erase
Command Sequence
Data Poll
from System
Data = FFh?
No
Yes
Erasure Completed
Embedded
Erase
algorithm
in progress
21444B-10

Am29F016B 17
PRELIMINARY
Table 5. Am29F016B Command Definitions
Legend:
X = Don’t care
RA = Address of the memory location to be read.
RD = Data read from location RA during read operation.
PA = Address of the memory location to be programmed.
Addresses latch on the falling edge of the WE# or CE# pulse,
whichever happens later.
PD = Data to be programmed at location PA. Data latches on
the rising edge of WE# or CE# pulse, whichever happens
first.
SA = Address of the sector to be verified (in autoselect mode)
or erased. Address bits A20–A16 select a unique sector.
SGA = Address of the sector group to be verified. Address
bits A20–A18 select a unique sec tor group.
Notes:
1. See Table 1 for description of bus operations.
2. All values are in hexadecimal.
3. Except when reading array or autoselect data, all bus
cycles are write operations.
4. Address bits A20–A11 are don’t cares for unlock and
command cycles, unless SA or PA required.
5. No unlock or command cycles required when reading
array data.
6. The Reset command is required to return to reading array
data when device is in the autoselect mode, or if DQ5
goes high (while the device is providing status data).
7. The fourth cycle of the autoselect command sequence is
a read cycle.
8. The data is 00h for an unprotected sector group and 01h
for a protected sector group. See “Autoselect Command
Sequence” for more information.
9. The system may read and program in non-erasing
sectors, or enter the autoselect mode, when in the Erase
Suspend mode. The Erase Suspend command is valid
only during a sector erase operation.
10. The Erase Resume command is valid only during the
Erase Suspend mode.
Command
Sequence
(Note 1)
Bus Cycles (Notes 2–4)
First Second Third Fourth Fifth Sixth
Addr Data Addr Data Addr Data Addr Data Addr Data Addr Data
Read (Note 5) 1 RA RD
Reset (Note 6) 1 XXX F0
Autoselect
(Note 7)
Manufacturer ID 4 555 AA 2AA 55 555 90 X00 01
Device ID 4 555 AA 2AA 55 555 90 X01 AD
Sector Group Protect
Verify (Note 8)
4 555 AA 2AA 55 555 90
SGA
X02
XX00
XX01
Program 4 555 AA 2AA 55 555 A0 PA PD
Chip Erase 6 555 AA 2AA 55 555 80 555 AA 2AA 55 555 10
Sector Erase 6 555 AA 2AA 55 555 80 555 AA 2AA 55 SA 30
Erase Suspend (Note 9) 1 XXX B0
Erase Resume (Note 10) 1 XXX 30
Cycles

18 Am29F016B
PRELIMINARY
WRITE OPERATION STATUS
The device provides several bits to determine the status of a write operation: DQ2, DQ3, DQ5, DQ6, DQ7,
and RY/BY#. Table 6 and the following subsections describe the functions of these bits. DQ7, RY/BY#, and
DQ6 each offer a method for deter mining whether a
program or erase operation is complete or in progress.
These three bits are discussed first.
DQ7: Data# Polling
The Data# Polling bit, DQ7, in dicates to the host
system whether an Embedded Algorithm is in
progress or completed, or whether the device is in
Erase Suspend. Data# P olling is v alid after the rising
edge of the final WE# pulse in the program or erase
command sequence.
During the Em bedded Program algor ithm, the device
outputs on DQ7 the complement of the datum programmed to DQ7. This DQ7 status also applies to programming during Erase Suspend. When the
Embedded Program algorithm is complete, the device
outputs the datum programmed to DQ7. The system
must provide the program address to read valid status
information on DQ7. If a program address falls within a
protected sector, Data# Polling on DQ7 is active for approximately 2 µs, then the device returns to reading
array data.
During the Embedded Erase algorithm, Data# Polling
produces a “0” on DQ7. When the Embedded Erase algorithm is complete, or if the device enters the Erase
Suspend mode, Data# Polling produces a “1” on DQ7.
This is analogous to the complement/true datum output
described for the Embedded Program algor ithm: the
erase function changes all the bits in a sector to “1”;
prior to this, the device outputs the “complement,” o r
“0.” The system must provide an address within any of
the sectors selected for erasure to read valid status information on DQ7.
After an erase command sequence is written, if all s ectors selected for erasing are protected, Data# Polling
on DQ7 is active f or appro ximately 100 µs , the n the device returns to reading array data. If not all selected
sectors are protected, the Embedded Erase algorithm
erases the unprotected sectors, and ignores the selected sectors that are protected.
When the system detects DQ7 has changed from the
complement to true data, it can read va lid data at DQ7–
DQ0 on the
following
read cycles. This is because DQ7
may change asynchronously with DQ0–DQ6 while
Output Enable (OE#) is asserted low. The Data# Polling Timings (During Embedded Algorithms) figure in
the “AC Characteristics” section illustrates this.
Table 6 shows the outputs for Data# Polling on DQ7.
Figure 4 shows the Data# Polling algorithm.
DQ7 = Data?
Yes
No
No
DQ5 = 1?
No
Yes
Yes
FAIL
PASS
Read DQ7–DQ0
Addr = VA
Read DQ7–DQ0
Addr = VA
DQ7 = Data?
START
Notes:
1. VA = Valid address for programming. During a sector
erase operation, a valid address is an address within any
sector selected for erasure. During chip erase, a valid
address is any non-protected sector address.
2. DQ7 should be rechecked even if DQ5 = “1” because
DQ7 may change simultaneously with DQ5.
21444B-11
Figure 4. Data# Polling Algorithm

Am29F016B 19
PRELIMINARY
RY/BY#: Ready/Busy#
The RY/BY# is a dedicated, open-drain output pin that
indicates whether an Embedded Algorithm is in
progress or complete. The RY/BY# status is valid after
the rising edge of the final WE# pulse in the command
sequence. Since RY/BY# is an open-drain output, several RY/BY# pins can be tied together in parallel with a
pull-up resistor to V
CC
.
If the output is low (Busy ), the de vice is activ ely er asing
or programming. (T his includes programming in the
Erase Suspend mode.) If th e output is high (Ready) ,
the device is ready to read array data (including during
the Erase Suspend mode), or is in the standby mode.
Table 6 shows the outputs for RY/BY#. The timing diagrams for read, reset, program, and erase shows the
relationship of RY/BY# to other signals.
DQ6: Toggle Bit I
Toggle Bit I on D Q6 indicates whether a n Embedded
Program or Erase algorithm is in progress or complete,
or whether the device has entered the Erase Suspend
mode. Toggle Bit I may be read at any address, and is
valid after the rising edge of the final WE# pulse in the
command sequence (prior to the program or eras e operation), and during the s ector erase time-out.
During an Embedded Program or Erase algorithm operation, successive read cyc les to any address cause
DQ6 to toggle. (The system may use either OE# or
CE# to control the read cycles.) When the operation is
complete, DQ6 stops toggling.
After an erase command sequence is written, if all
sectors selected for erasing are protected, DQ6 toggles for appro xi mately 100 µ s , t hen returns to read ing
array data. If not all selected sectors are pro tected,
the Embedded Erase algorithm erases the unprotected sectors, and ignores the selected sectors that
are protected.
The system can use DQ6 and DQ2 together to determine whether a sector is actively erasing or is erasesuspended. When the device is activ ely erasing (that is ,
the Embedded Erase algorithm is in progress), D Q6
toggles. When the device enters the Erase Suspend
mode, DQ6 stops toggling. However, the system must
also use DQ2 to determine which sectors are erasing
or erase-suspended. Alternatively, the system can use
DQ7 (see the subsection on “DQ7: Data# Polling”).
If a program address falls within a pro tected sector,
DQ6 toggles for approximately 2 µs after the program
command sequence is written, then returns to reading
array data.
DQ6 also toggles during the erase-suspend-program
mode, and stops toggling once the Embedded Program algorithm is complete.
The Write Operation Status table shows the outputs for
Toggle Bit I on DQ6. Refer to Figure 5 for the toggle bit
algorithm, and to the Toggle Bit Timings figure in the
“AC Characteristics” section for the timing diagram.
The DQ2 vs. DQ6 figure show s the differences between DQ2 and DQ6 in graphical form. See also the
subsection on “DQ2: Toggle Bit II”.
DQ2: Toggle Bit II
The “Toggle Bit II” on DQ2, when used with DQ6, indicates whether a par ticular sect or is actively erasing
(that is, the Embedded Erase algo rithm is in pro gress),
or whether that sector is erase-suspended. Toggle Bit
II is valid after the rising edge of t he final WE# pulse in
the command sequence.
DQ2 toggles w hen the system reads at addresses
within those sector s that have been selected for erasure. (The system may use either OE# or CE# to control the read cycles.) But DQ2 cannot distinguish
whether the sector is actively erasing or is erase-suspended. DQ6, by comparison, indicates whether the
device is actively erasing, or is in Erase Suspend, but
cannot distinguish which sectors are selected for erasure. Thus, both status bits are required for s ector and
mode information. Refer to Table 6 to compare outputs
for DQ2 and DQ6.
Figure 5 shows the toggle bit algorithm in flowchar t
form, and the section “DQ2: Toggle Bit II” explains the
algorithm. See also the “DQ6: Toggle Bit I” subsection.
Refer to the Toggle Bit Timings figure for the toggle bit
timing diagram. The DQ2 vs. DQ6 figure shows t he differences between DQ2 and DQ6 in graphical f orm.
Reading Toggle Bits DQ6/DQ2
Refer to Figure 5 for the follow ing discussion. Whenever the system initially begins reading toggle bit status, it must read DQ7–DQ0 at least twice in a row to
determine whether a toggle bit is toggling. Typically , a
system would note a nd store th e val ue of the to ggle bit
after the first read. After the second read, the system
would compare the ne w v alue of the toggle bit with the
first. If the toggle bit is not to ggling, the device has
completed the program or erase operation. The system can read arra y data on DQ7–DQ0 on the f ollo wing
read cycle.
However, if after the initial two read cycles, the system
determines that the toggle bit is still toggli ng, the
system also should note whether the value of DQ5 is
high (see the section on DQ5). If it is, the system
should then determine again whether the toggle bit is
toggling, since the toggle bit may have stopped toggling just as DQ5 went high. If the toggle bit is no longer
toggling, the device has successfully comp leted the
program or erase operation. If it is still toggling, the
device did not complete the oper ation successfully, and

20 Am29F016B
PRELIMINARY
the system must write the reset command to return to
reading array data.
The remaining scenario is that the system initially determines that the toggle bit is toggling and DQ5 has not
gone high. The system may continue to monitor the
toggle bit and DQ5 through success ive read cycle s, determining the status as described in the previous paragraph. Alterna tively, it may choose to perform o ther
system tasks. In this case, the system must start at the
beginning of the algorithm when it returns to determine
the status of the operation (top of Figure 5).
DQ5: Exceeded Timing Limits
DQ5 indicates whether the program or erase time has
exceeded a specified internal pulse count limit. Under
these conditions DQ5 produces a “1.” This is a failure
condition that indicates the prog ram or er ase cycle was
not successfully completed.
The DQ5 failure condition may appear if the system
tries to program a “1” to a location that i s previously programmed to “0.” Only an era se operation can change
a “0” back to a “1.” Under this condition, the device
halts the operation, and when the operation has ex-
ceeded the timing limits, DQ5 produces a “1.”
Under both these conditions, t he system must issue the
reset command to return the device to reading array
data.
DQ3: Sector Erase Timer
After writing a sector erase command sequence, the
system may read DQ3 to det ermine whether or not an
erase operation has begun. (The sector erase timer
does not apply to the chip erase command.) If additional sectors are selec ted for er asure, th e entire timeout also applies after each add itional sector erase
command. When the time-out is complete, DQ3
switches from “0” to “1.” The system may ignore DQ3
if the system can guar antee t hat the time betw een additional sector erase commands will always be less
than 50 µs. Se e also th e “S ector Er ase Command Sequence” section.
After the sector erase command sequence is written,
the system should read the status on DQ7 (Data# Polling) or DQ6 (Toggle Bit I) to ensure the device has accepted the command sequence, and then read DQ3. If
DQ3 is “1”, the internally controlled erase cycle has begun; all further commands (other than Erase Su spend)
are ignored u ntil the erase operation is complete. If
DQ3 is “0”, the device will accept additional sector
erase commands. To ensure the command has been
accepted, the system software should ch eck the s tatus
of DQ3 prior to and following each subsequent s ector
erase command. If DQ3 is high on the second status
check, the last command might not have been accepted. Table 6 shows the outputs for DQ3.
START
No
Yes
Yes
DQ5 = 1?
No
Yes
Toggle Bit
= Toggle?
No
Program/Erase
Operation Not
Complete, Write
Reset Command
Program/Erase
Operation Complete
Read DQ7–DQ0
Toggle Bit
= Toggle?
Read DQ7–DQ0
Twice
Read DQ7–DQ0
Notes:
1. Read toggle bit twice to determine whether or not it is
toggling. See text.
2. Recheck toggle bit because it may stop toggling as DQ5
changes to “1”. See text.
21444B-12
Figure 5. Toggle Bit Algorithm
(Notes
1, 2)
(Note 1)

Am29F016B 21
PRELIMINARY
Table 6. Write Operation Status
Notes:
1. DQ7 and DQ2 require a valid address when reading status information. Refer to the appropriate subsection for further details.
2. DQ5 switches to ‘1’ when an Embedded Program or Embedded Erase operation has exceeded the maximum timing limits.
See “DQ5: Exceeded Timing Limits” for more information.
Operation
DQ7
(Note 1) DQ6
DQ5
(Note 2) DQ3
DQ2
(Note 1) RY/BY#
Standard
Mode
Embedded Program Algorithm DQ7# Toggle 0 N/A No toggle 0
Embedded Erase Algorithm 0 Toggle 0 1 Toggle 0
Erase
Suspend
Mode
Reading within Erase
Suspended Sector
1 No toggle 0 N/A Toggle 1
Reading within Non-Erase
Suspended Sector
Data Data Data Data Data 1
Erase-Suspend-Program DQ7# Toggle 0 N/A N/A 0

22 Am29F016B
PRELIMINARY
ABSOLUTE MAXIMUM RATINGS
Storage Temperature
Plastic Packages . . . . . . . . . . . . . . . –65°C to +125°C
Ambient Temperature
with Power Applied. . . . . . . . . . . . . . –55°C to +125°C
Voltage with Respect to Ground
V
CC
(Note 1) . . . . . . . . . . . . . . . . .–2.0 V to 7.0 V
A9, OE#, RESET# (Note 2). . . . .–2.0 V to 12.5 V
All other pins (Note 1) . . . . . . . . . .–2.0 V to 7.0 V
Output Short Circuit Current (Note 3) . . . . . . 200 mA
Notes:
1. Minimum DC voltage on input or I/O pins is –0.5 V . During
voltage transitions, inputs may overshoot V
SS
to –2.0 V
for periods of up to 20 ns. See Figure 6. Maximum DC
voltage on output and I/O pins is V
CC
+ 0.5 V. During
voltage transitions, outputs may overshoot to V
CC
+ 2.0 V
for periods up to 20 ns. See Figure 7.
2. Minimum DC input voltage on A9, OE#, RESET# pins is
–0.5V . During voltage transitions, A9, OE#, RESET# pins
may overshoot V
SS
to –2.0 V for periods of up to 20 ns.
See Figure 6. Maximum DC input voltage on A9, OE#,
and RESET# is 12.5 V which may overshoot to 13.5 V for
periods up to 20 ns.
3. No more than one output shorted at a time. Duration of
the short circuit should not be greater than one second.
Stresses greater than those listed in this section may cause
permanent da mage to the device. This is a stress rating
only; functional operation of the device at these or any other
conditions above those indicated in the operational sections
of this specification is not implied. Exposure of the device to
absolute maximum rating conditions for extended periods
may affect device reliability.
Figure 6. Maximum Negative Overshoot
Waveform
Figure 7. Maximum Positive Overshoot
Waveform
OPERATING RANGES
Commercial (C) Devices
Case Temperature (TC) . . . . . . . . . . . . . 0°C to +70°C
Industrial (I) Devices
Case Temperature (T
C
) . . . . . . . . . . . –40°C to +85°C
Extended (E) Devices
Ambient Temperature (T
A
) . . . . . . . . –55°C to +125°C
V
CC
Supply Voltages
VCC for± 10% de vices . . . . . . . . . . . .+4.5 V to +5.5 V
Operating rang es define those limits between which the
functionality of the device is guaranteed.
20 ns
20 ns
+0.8 V
–0.5 V
20 ns
–2.0 V
21444B-13
20 ns
20 ns
V
CC
+2.0 V
V
CC
+0.5 V
20 ns
2.0 V
21444B-14

Am29F016B 23
PRELIMINARY
DC CHARACTERISTICS
TTL/NMOS Compatible
CMOS Compatible
Notes for DC Characteristics (both tables):
1. The I
CC
current is typically less than 1 mA/MHz, with OE# at VIH.
2. I
CC
active while Embedded Program or Embedded Erase algorithm is in progress.
3. Not 100% tested.
Parameter
Symbol Parameter Description Test Description Min Typ Max Unit
I
LI
Input Load Current VIN = V
SS
to VCC, V
CC
= VCC Max ±1.0 µA
I
LIT
A9 Input Load Current V
CC
= V
CC
Max, A9 = 12.5 V 50 µA
I
LO
Output Leakage Current V
OUT
= V
SS
to VCC, V
CC
= VCC Max ±1.0 µA
I
CC1
VCC Read Current (Note 1) CE# = V
IL,
OE# = V
IH
25 40 mA
I
CC2
VCC Write Current (Notes 2, 3) CE# = V
IL,
OE# = V
IH
40 60 mA
I
CC3
V
CC
Standby Current
(CE# Controlled)
VCC = VCC Max, CE# = VIH,
RESET#
= VIH
0.4 1.0 mA
I
CC4
V
CC
Standby Current
(RESET# Controlled)
V
CC
= V
CC
Max, RESET# = V
IL
0.4 1.0 mA
V
IL
Input Low Level –0.5 0.8 V
V
IH
Input High Level 2.0 V
CC
+ 0.5 V
V
ID
Voltage for Autoselect and Sector
Protect
V
CC
= 5.0 V 11.5 12.5 V
V
OL
Output Low Voltage IOL = 12 mA, V
CC
= V
CC
Min 0.45 V
V
OH
Output High Level IOH = –2.5 mA V
CC
= V
CC
Min 2.4 V
V
LKO
Low VCC Lock-out Voltage 3.2 4.2 V
Parameter
Symbol Parameter Description Test Description Min Typ Max Unit
I
LI
Input Load Current VIN = V
SS
to VCC, V
CC
= V
CC
Max ±1.0 µA
I
LIT
A9 Input Load Current V
CC
= V
CC
Max, A9 = 12.5 V 50 µA
I
LO
Output Leakage Current V
OUT
= V
SS
to VCC, V
CC
= V
CC
Max ±1.0 µA
I
CC1
V
CC
Read Current (Note 1) CE# = V
IL,
OE# = V
IH
25 40 mA
I
CC2
V
CC
Write Current (Notes 2, 3) CE# = V
IL,
OE# = V
IH
30 40 mA
I
CC3
V
CC
Standby Current
(CE# Controlled)
V
CC = VCC
Max, CE# = V
CC
± 0.5 V,
RESET# = V
CC
± 0.5 V
15µA
I
CC4
V
CC
Standby Current
(RESET# Controlled)
V
CC
= V
CC
Max,
RESET# = V
SS
± 0.5 V
15µA
V
IL
Input Low Level –0.5 0.8 V
V
IH
Input High Level 0.7x V
CC
V
CC
+ 0.3 V
V
ID
Voltage for Autoselect
and Sector Protect
V
CC
= 5.0 V 11.5 12.5 V
V
OL
Output Low Voltage IOL = 12 mA, V
CC
= V
CC
Min 0.45 V
V
OH1
Output High Voltage
I
OH
= –2.5 mA, V
CC
= V
CC
Min 0.85 V
CC
V
V
OH2
IOH = –100 µA, V
CC
= V
CC
Min VCC – 0.4 V
V
LKO
Low V
CC
Lock-out Voltage 3.2 4.2 V

24 Am29F016B
PRELIMINARY
TEST CONDITIONS
Table 7. Test Specifications
KEY TO SWITCHING WAVEFORMS
2.7 kΩ
C
L
6.2 kΩ
5.0 V
Device
Under
Test
21444B-15
Figure 8. Test Setup
Note: Diodes are IN3064 or equivalent
Test Condition
All speed
options Unit
Output Load 1 TTL gate
Output Load Capacitance, C
L
(including jig capacitance)
100 pF
Input Rise and Fall Times 20 ns
Input Pulse Levels 0.45–2.4 V
Input timing measurement
reference levels
0.8 V
Output timing measurement
reference levels
2.0 V
KS000010-PAL
WAVEFORM I NP UTS OUTPUTS
Steady
Changing from H to L
Changing from L to H
Don’t Care, Any Change Permitted Changing, State Unknown
Does Not Apply Center Line is High Impedance State (High Z)

Am29F016B 25
PRELIMINARY
AC CHARACTERISTICS
Read-only Operations
Notes:
1. Not 100% tested.
2. Refer to Figure 1 and Table 6 for test specifications.
Parameter Symbol
Parameter Description
Test
Setup
Speed Options
UnitJEDEC Standard -70 -90 -120 -150
t
AVAV
t
RC
Read Cycle Time (Note 1) Min 70 90 120 150 ns
t
AVQV
t
ACC
Address to Output Delay
CE# = V
IL
OE# = V
IL
Max 70 90 120 150 ns
t
ELQV
t
CE
Chip Enable to Output Delay OE# = VILMax 70 90 120 150 ns
t
GLQV
t
OE
Output Enable to Output Delay Max 40 40 50 55 ns
t
OEH
Output Enable Hold
Time (Note 1)
Read Min0000ns
Toggle and
Data# Polling
Min10101010ns
t
EHQZ
t
DF
Chip Enable to Output High Z (Note 1) Max 20 20 30 35 ns
t
GHQZ
t
DF
Output Enable to Output High Z (Note 1) Max 20 20 30 35 ns
t
AXQX
t
OH
Output Hold Time From Addresses CE#
or OE# Whichever Occurs First
Min0000ns
t
Ready
RESET# Pin Low to Read Mode
(Note 1)
Max20202020µs
t
CE
Outputs
WE#
Addresses
CE#
OE#
HIGH Z
Output Valid
HIGH Z
Addresses Stable
t
RC
t
ACC
t
OEH
t
OE
0 V
RY/BY#
RESET#
t
DF
t
OH
21444B-16
Figure 9. Read Operation Ti mi ng s

26 Am29F016B
PRELIMINARY
AC CHARACTERISTICS
Hardware Reset (RESET#)
Note: Not 100% tested.
Parameter
Description All Speed OptionsJEDEC Std Test Setup Unit
t
READY
RESET# Pin Low (During Embedded
Algorithms) to Read or Write (See Note)
Max 20 µs
t
READY
RESET# Pin Low (NOT During Embedded
Algorithms) to Read or Write (See Note)
Max 500 ns
t
RP
RESET# Pulse Width Min 500 ns
t
RH
RESET# High Time Before Read (See Note) Min 50 ns
t
RB
RY/BY# Recovery Time Min 0 ns
RESET#
RY/BY#
RY/BY#
t
RP
t
Ready
Reset Timings NOT during Embedded Algorithms
t
Ready
CE#, OE#
t
RH
CE#, OE#
Reset Timings during Embedded Algorithms
RESET#
t
RP
t
RB
21444B-17
Figure 10. RESET# Timings

Am29F016B 27
PRELIMINARY
AC CHARACTERISTICS
Erase/Program Operations
Notes:
1. Not 100% tested.
2. See the “Erase And Programming Performance” section for more information.
Parameter
Parameter Description
Speed Options
UnitJEDEC Std -70 -90 -120 -150
t
AVAV
t
WC
Write Cycle Time (Note 1) Min 70 90 120 150 ns
t
AVWL
t
AS
Address Setup Time Min 0 ns
t
WLAX
t
AH
Address Hold Time Min 40 45 50 50 ns
t
DVWH
t
DS
Data Setup Time Min 40 45 50 50 ns
t
WHDX
t
DH
Data Hold Time Min 0 ns
t
OES
Output Enable Setup Time Min 0 ns
t
GHWL
t
GHWL
Read Recover Time Before Write
(OE# high to WE# low)
Min 0 ns
t
ELWL
t
CS
CE# Setup Time Min 0 ns
t
WHEH
t
CH
CE# Hold Time Min 0 ns
t
WLWH
t
WP
Write Pulse Width Min 40 45 50 50 ns
t
WHWL
t
WPH
Write Pulse Width High Min 20 ns
t
WHWH1tWHWH1
Byte Programming Operation (Note 2) Typ 7 µs
t
WHWH2tWHWH2
Sector Erase Operation (Note 2)
Typ 1 sec
Max 8 sec
t
VCS
VCC Set Up Time (Note 1) Min 50 µs
t
BUSY
WE# to RY/BY# Valid Min 40 40 50 60 ns

28 Am29F016B
PRELIMINARY
AC CHARACTERISTICS
OE#
WE#
CE#
V
CC
Data
Addresses
t
DS
t
AH
t
DH
t
WP
PD
t
WHWH1
t
WC
t
AS
t
WPH
t
VCS
555h
PA PA
Read Status Data (last two cycles)
A0h
t
GHWL
t
CS
Status
D
OUT
Program Command Sequence (last two cycles)
RY/BY#
t
RB
t
BUSY
t
CH
PA
Note: PA = program address, PD = program data, D
OUT
is the true data at the program address.
21444B-18
Figure 11. Program Operation Timings

Am29F016B 29
PRELIMINARY
AC CHARACTERISTICS
OE#
CE#
Addresses
V
CC
WE#
Data
2AAh SA
t
GHWL
t
AH
t
WP
t
WC
t
AS
t
WPH
555h for chip erase
10 for Chip Erase
30h
t
DS
t
VCS
t
CS
t
DH
55h
t
CH
In
Progress
Complete
t
WHWH2
VA
VA
RY/BY#
t
RB
t
BUSY
Note:
SA = Sector Address. VA = Valid Address for reading status data.
21444B-19
Figure 12. Chip/Sector Erase Operation Timings

30 Am29F016B
PRELIMINARY
AC CHARACTERISTICS
WE#
CE#
OE#
High Z
t
OE
High Z
DQ7
DQ0–DQ6
RY/BY#
t
BUSY
Complement
True
Addresses
VA
t
OEH
t
CE
t
CH
t
OH
t
DF
VA VA
Status Data
Complement
Status Data
True
Valid Data
Valid Data
t
ACC
t
RC
Note:
V A = Valid address. Illustration shows first status cycle after command sequence, last status read cycle, and array data read cycle.
21444B-20
Figure 13. Data# Polling Timings (During Embedded Algorithms)
WE#
CE#
OE#
High Z
t
OE
DQ6/DQ2
RY/BY#
t
BUSY
Addresses
VA
t
OEH
t
CE
t
CH
t
OH
t
DF
VA VA
t
ACC
t
RC
Valid DataValid StatusValid Status
(first read) (second read) (stops toggling)
Valid Status
VA
Note:
V A = Valid address; not required for DQ6. Illustration shows first two status cycle after command sequence, last status read cycle,
and array data read cycle.
21444B-21
Figure 14. Toggle Bit Timings (During Embedded Algorithms)

Am29F016B 31
PRELIMINARY
AC CHARACTERISTICS
Temporary Sector Unprotect
Note: Not 100% tested.
Parameter
All Speed OptionsJEDEC Std. Description Unit
t
VIDR
VID Rise and Fall Time (See Note) Min 500 n s
t
RSP
RESET# Setup Time for Temporary Sector
Unprotect
Min 4 µs
Enter
Erase
Erase
Erase
Enter Erase
Suspend Program
Erase Suspend
Read
Erase Suspend
Read
Erase
WE#
DQ6
DQ2
Erase
Complete
Erase
Suspend
Suspend
Program
Resume
Embedded
Erasing
Note: The system may use OE# or CE# to toggle DQ2 and DQ6. DQ2 toggles only when read at an address within the
erase-suspended sector.
21444B-22
Figure 15. DQ2 vs. DQ6
RESET#
t
VIDR
12 V
0 or 5 V
CE#
WE#
RY/BY#
t
VIDR
t
RSP
Program or Erase Command Sequence
0 or 5 V
21444B-23
Figure 16. Temporary Sector Group Unprotect Timings

32 Am29F016B
PRELIMINARY
AC CHARACTERISTICS
Erase and Program Operations
Alternate CE# Controlled Writes
Notes:
1. Not 100% tested.
2. See the “Erase And Programming Performance” section for more information.
Parameter Symbol
Parameter Description
Speed Options
UnitJEDEC Standard -70 -90 -120 -150
t
AVAV
t
WC
Write Cycle Time (Note 1) Min 7 0 90 120 1 50 ns
t
AVEL
t
AS
Address Setup Time Min 0 ns
t
ELAX
t
AH
Address Hold Time Min 40 45 50 50 ns
t
DVEH
t
DS
Data Setup Time Min 40 45 50 50 ns
t
EHDX
t
DH
Address Hold Time Min 0 ns
t
GHEL
t
GHEL
Read Recover Time Before Write Min 0 ns
t
WLEL
t
WS
CE# Setup Time Min 0 ns
t
EHWH
t
WH
CE# Hold Time Min 0 ns
t
ELEH
t
CP
Write Pulse Width Min 4 0 45 50 50 ns
t
EHEL
t
CPH
Write Pulse Width High Min 20 ns
t
WHWH1
t
WHWH1
Byte Programming Operation (Note 2) Typ 7 µs
t
WHWH2
t
WHWH2
Sector Erase Operation (Note 2)
Typ 1 sec
Max 8 sec

Am29F016B 33
PRELIMINARY
AC CHARACTERISTICS
t
GHEL
t
WS
OE#
CE#
WE#
RESET#
t
DS
Data
t
AH
Addresses
t
DH
t
CP
DQ7# D
OUT
t
WC
t
AS
t
CPH
PA
Data# Polling
A0 for program
55 for erase
t
RH
t
WHWH1 or 2
RY/BY#
t
WH
PD for program
30 for sector erase
10 for chip erase
555 for program
2AA for erase
PA for program
SA for sector erase
555 for chip erase
t
BUSY
Notes:
1. PA = Program Address, PD = Program Data, SA = Sector Address, DQ7# = Complement of Data Input, D
OUT
= Array Data.
2. Figure indicates the last two bus cycles of the command sequence.
21444B-24
Figure 17. Alternate CE# Controlled Write Operation Timings

34 Am29F016B
PRELIMINARY
ERASE AND PROGRAMMING PERFORMANCE
Notes:
1. Typical program and erase times assume the following conditions: 25
°
C, 5.0 V VCC, 1,000,000 cycles. Additionally,
programming typicals assume checkerboard pattern.
2. Under worst case conditions of 90°C, V
CC
= 4.5 V, 1,000,000 cycles.
3. The typical chip programming time is considerably less than the maximum chip programming time listed, since most bytes
program faster than the maximum byte program time listed. If the maximum byte program time given is exceeded, only then
does the device set DQ5 = 1. See the section on DQ5 for further information.
4. In the pre-programming step of the Embedded Erase algorithm, all bytes are programmed to 00h before erasure.
5. System-level overhead is the time required to execute the four-bus-cycle sequence for programming. See Table 6 for further
information on command definitions.
6. The device has a guaranteed minimum erase and program cycle endurance of 1,000,000 cycles.
LATCHUP CHARACTERISTIC
S
Includes all pins except VCC. Test conditions: VCC = 5.0 Volt, one pin at a time.
TSOP AND SO PIN CAPACITANCE
Notes:
1. Sampled, not 100% tested.
2. Test conditions T
A
= 25°C, f = 1.0 MHz.
DATA RETENTION
Parameter Typ (Note 1) Max (Note 2) Unit Comments
Sector Erase Time 1 8 sec
Excludes 00h programming prior to
erasure (Note 4)
Chip Erase Time 32 256 sec
Byte Programming Time 7 300 µs
Excludes system-level overhead
(Note 5)
Chip Programming Time (Note 3) 14.4 43.2 sec
Min Max
Input Voltage with respect to V
SS
on I/O pins –1.0 V VCC + 1.0 V
V
CC
Current –100 mA +100 mA
Parameter
Symbol Parameter Description Test Conditions Min Max Unit
C
IN
Input Capacitance VIN = 0 6 7.5 pF
C
OUT
Output Capacitance V
OUT
= 0 8.5 12 pF
C
IN2
Control Pin Capacitance VIN = 0 7.5 9 pF
Parameter Test Conditions Min Unit
Minimum Pattern Data Retention Time
150°C 10 Years
125°C 20 Years

Am29F016B 35
PRELIMINARY
PHYSICAL DIMENSIONS
TS 040—40-Pin Standard Thin Small Outline Package (measured in millimeters)
TSR040—40-Pin Reverse Thin Small Outline Package (measured in millimeters)
18.30
18.50
19.80
20.20
40
20
Pin 1 I.D.
21
1
0.50 BSC
9.90
10.10
0.95
1.05
0.05
0.15
1.20
MAX
0.50
0.70
0°
5°
16-038-TSOP-1_AE
TS 040
2-27-97 lv
0.10
0.21
0.08
0.20
18.30
18.50
19.80
20.20
40
20
Pin 1 I.D.
21
1
0.50 BSC
9.90
10.10
0.95
1.05
0.05
0.15
1.20
MAX
0.50
0.70
0°
5°
16-038-TSOP-1_AE
TSR040
2-27-97 lv
0.10
0.21
0.08
0.20

36 Am29F016B
PRELIMINARY
PHYSICAL DIMENSIONS (continued)
TS 048—48-Pin Standard Thin Small Outline Package (measured in millimeters)
TSR048—48-Pin Reverse Thin Small Outline Package (measured in millimeters)
48
25
1
24
18.30
18.50
19.80
20.20
11.90
12.10
0.05
0.15
0.50 BSC
0.95
1.05
16-038-TS48-2
TS 048
DT95
8-8-96 lv
Pin 1 I.D.
1.20
MAX
0.50
0.70
0.10
0.21
0.25MM (0.0098") BSC
0°
5°
0.08
0.20
48
25
1
24
18.30
18.50
19.80
20.20
11.90
12.10
SEATING PLANE
0.05
0.15
0.50 BSC
0.95
1.05
16-038-TS48
TSR048
DT95
8-8-96 lv
Pin 1 I.D.
1.20
MAX
0.50
0.70
0.10
0.21
0.25MM (0.0098") BSC
0°
5°
0.08
0.20

Am29F016B 37
PRELIMINARY
PHYSICAL DIMENSIONS (continued)
SO 044—44-Pin Small Outline Package (measured in millimeters)
44
23
1
22
13.10
13.50
15.70
16.30
1.27 NOM.
28.00
28.40
2.17
2.45
0.35
0.50
0.10
0.35
2.80
MAX.
SEATING
PLANE
16-038-SO44-2
SO 044
DF83
8-8-96 lv
0.10
0.21
0.60
1.00
0°
8°
END VIEW
SIDE VIEW
TOP VIEW

38 Am29F016B
PRELIMINARY
REVISION SUMMARY FOR AM29F016B
Revision B
Global
Made formatting and layout consistent with other data
sheets. Used updated common tables and diagr ams.
Revision B+1
AC Characteristics—Read-only Operations
Deleted note referring to output driver disable time.
Figure 16—Temporary Sector Group Unprotect
Timings
Corrected title to indicate “sector group. ”
Revision B+2
Global
Added -70 speed option, deleted -75 speed option.
Distinctive Characteristics
Changed minimum 100K wr ite/erase cycles guaranteed to 1,000,000.
Ordering Information
Added extended temperature availability to -90, -120,
and -150 speed options.
Operating Ranges
Added extended temperature range.
DC Characteristics, CMOS Compatible
Corrected the CE# and RESET# test conditions for
I
CC3
and I
CC4
to VCC ±0.5 V.
AC Characteristics
Erase/Program Operations; Erase and Program Operations Alternate CE# Controlled Writes:
Corrected the
notes reference f or t
WHWH1
and t
WHWH2
. These parameters are 100% tested. Corrected the note ref erence for
t
VCS
. This parameter is not 100% tested.
Temporary Sector Unprotect Table
Added note reference for t
VIDR
. This parameter is not
100% tested.
Erase and Programming Performance
Changed mini mum 100K program a nd erase cycles
guaranteed to 1,000,000.
Trademarks
Copyright © 1998 Advanced Micro Devices, Inc. All rights reserved.
AMD, the AMD logo, and combinations thereof are registered trademarks of Advanced Micro Devices, Inc.
ExpressFlash is a trademark of Advanced Micro Devices, Inc.
Product names used in this publication are for identification purposes only and may be trademarks of their respective companies.
 Loading...
Loading...