

Page 1
PowerFlex 750-Series AC Drives with TotalFORCE Control
Catalog Number 20G
Quick Start
Original Instructions
Page 2
PowerFlex 750-Series AC Drives with TotalFORCE Control Quick Start
Important User Information
Read this document and the documents listed in the additional resources section about installation, configuration, and
operation of this equipment before you install, configure, operate, or maintain this product. Users are required to familiarize
themselves with installation and wiring instructions in addition to requirements of all applicable codes, laws, and standards.
Activities including installation, adjustments, putting into service, use, assembly, disassembly, and maintenance are required to
be carried out by suitably trained personnel in accordance with applicable code of practice.
If this equipment is used in a manner not specified by the manufacturer, the protection provided by the equipment may be
impaired.
In no event will Rockwell Automation, Inc. be responsible or liable for indirect or consequential damages resulting from the use
or application of this equipment.
The examples and diagrams in this manual are included solely for illustrative purposes. Because of the many variables and
requirements associated with any particular installation, Rockwell Automation, Inc. cannot assume responsibility or liability for
actual use based on the examples and diagrams.
No patent liability is assumed by Rockwell Automation, Inc. with respect to use of information, circuits, equipment, or software
described in this manual.
Reproduction of the contents of this manual, in whole or in part, without written permission of Rockwell Automation, Inc., is
prohibited.
Throughout this manual, when necessary, we use notes to make you aware of safety considerations.
WARNING: Identifies information about practices or circumstances that can cause an explosion in a hazardous environment, which may
lead to personal injury or death, property damage, or economic loss.
ATTENTION: Identifies information about practices or circumstances that can lead to personal injury or death, property damage, or
economic loss. Attentions help you identify a hazard, avoid a hazard, and recognize the consequence.
IMPORTANT
Identifies information that is critical for successful application and understanding of the product.
Labels may also be on or inside the equipment to provide specific precautions.
SHOCK HAZARD: Labels may be on or inside the equipment, for example, a drive or motor, to alert people that dangerous voltage may
be present.
BURN HAZARD: Labels may be on or inside the equipment, for example, a drive or motor, to alert people that surfaces may reach
dangerous temperatures.
ARC FLASH HAZARD: Labels may be on or inside the equipment, for example, a motor control center, to alert people to potential Arc
Flash. Arc Flash will cause severe injury or death. Wear proper Personal Protective Equipment (PPE). Follow ALL Regulatory requirements
for safe work practices and for Personal Protective Equipment (PPE).
2 Rockwell Automation Publication 750-QS100B-EN-P - August 2020
Page 3

Table of Contents
Preface Introduction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Who Should Use This Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Equipment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Supported Applications. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Summary of Changes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Step 1: Gather the Required
Information
Step 2: Validate the Drive
Installation
Step 3: Power Up, Configure the
Modular Control Profiles
Step 4: Configure the Line Side
Converter
Step 5: Enter Motor Data Enter Motor Nameplate Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Step 6: Set Up Velocity Feedback
for Flux Vector Control
Record System Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Record Velocity Reference and Start/Stop Sources . . . . . . . . . . . . . . . . 9
Verify the Setting of the ENABLE and SAFETY Jumpers . . . . . . . . 12
Verify Power Source Ratings and Wiring Configurations . . . . . . . . . 13
Verify Power Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Verify Power Jumper Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Verify I/O Wiring. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Preparation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
How to Use the HIM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
HIM Navigation Keys . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
HIM Soft Keys . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
HIM Single Function Keys . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
HIM Alarms and Faults. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Power the Drive. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
For Drives Without 24V Auxiliary Power . . . . . . . . . . . . . . . . . . . 19
For Drives With 24V Auxiliary Power. . . . . . . . . . . . . . . . . . . . . . . 19
Select the Language . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Configure the Motor Side Inverter. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Enter the Voltage Class . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Enter the Duty Rating . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Enter the Velocity Units . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Enter the Motor Control Mode. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Enter the Application Selection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Enter the Embedded Logic Selection . . . . . . . . . . . . . . . . . . . . . . . . 23
Enter the Motor Stop Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Enter the Motor Side Bus Regulation Mode . . . . . . . . . . . . . . . . . 25
Reset Device and Verify the Configurations . . . . . . . . . . . . . . . . . . . . . 25
Configure Embedded EtherNet/IP Communication Adapter. . . . . 26
Set the Embedded Ethernet Adapter IP Address Switches. . . . . . . . . 27
Enter Line Side Converter Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Enter Motor Poles. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Enter Motor Overload Hertz. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Enter Motor Protection Class . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Enter Motor Hot Start Coefficient . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Enter Motor Cooling Time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Record Encoder Information. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Configure Motor Encoder Velocity Feedback. . . . . . . . . . . . . . . . . . . . 34
Rockwell Automation Publication 750-QS100B-EN-P - August 2020 3
Page 4

Table of Contents
Step 7: Tune the Motor Side
Inverter Control
Enable the HIM Start Key . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Set Maximum Velocity for Permanent Magnet Motor . . . . . . . . . . . . 35
Perform the Direction Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Select the Source of Motor Control Parameter Values . . . . . . . . . . . . 38
Enter Motor Inertia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Motor Inertia Test. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Perform the Motor ID Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Rotate Motor ID Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Static Motor ID Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Autotune Bandwidth Calculations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Step 8: Set Up Velocity Reference Default Reference Source . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Door Mounted or Remote Mounted HIM . . . . . . . . . . . . . . . . . . . . . . 44
Connections on 11-Series and 22-Series I/O Modules . . . . . . . . . . . . 44
Embedded EtherNet/IP Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Step 9: Set Up Start/Stop Human Interface Module. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Control on 11-Series and 22-Series I/O Modules . . . . . . . . . . . . . . . . 46
Three-Wire Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Two-Wire Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Embedded EtherNet/IP Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Step 10: Set Acceleration and
Acceleration and Deceleration Times . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Deceleration Times
Step 11: Configure Outputs Analog Outputs. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Digital Outputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Step 12: Verify Drive Operation Configuration Troubleshooting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Contact Technical Support. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
After Basic Setup Configure Predictive Maintenance. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Advanced Configuration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Reference Information Reset Device . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Cycle Power to the Drive and Control Pod . . . . . . . . . . . . . . . . . . 53
Use the HIM Reset Device Function . . . . . . . . . . . . . . . . . . . . . . . . 53
Status Indicators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Setting Factory Defaults . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Line Side Converter Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
LCL Filter Capacitor Resonance Alarms . . . . . . . . . . . . . . . . . . . . 57
High Inertia Loads . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Acceleration Time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Deceleration Time. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Disable the HIM Start Function. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Using the HIM CopyCat Function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Calculating AC Line Impedance. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
4 Rockwell Automation Publication 750-QS100B-EN-P - August 2020
Page 5

Preface
Introduction
This Quick Start is designed to guide you through the basic steps that are required to start up your PowerFlex® 755TL
low harmonic, or PowerFlex 755TR regenerative standalone AC drives, for the first time, for simple applications. This
procedure uses the Human Interface Module (HIM) to configure parameters. However, you can use Connected
Components Workbench™ (CCW) (version 11 or later) software and the associated PowerFlex 755T Wizards to
configure parameters, instead of using the HIM.
Who Should Use This Manual
This manual is intended for qualified personnel.
• You must understand the hazards that are associated with electromechanical equipment installations.
• You must understand and follow all applicable local, national, and/or international electrical codes.
• You must be able to program and operate Adjustable Frequency AC Drive devices.
• You must have an understanding of the parameter settings and functions.
Equipment
The following equipment requirements apply to the use of this publication:
• The drive is a PowerFlex 755TL or PowerFlex 755TR standalone installation.
• The motor is either an induction motor, a synchronous reluctance motor, or a permanent magnet motor.
• No load sharing or multiple motors on a single drive.
• The drive has all required circuit protection installed.
• The drive and motor are connected and ready to have AC power applied.
• The drive is equipped with either a PowerFlex 20-HIM-A6 or a 20-HIM-C6S Human Interface Module (HIM).
• If used, the motor feedback device is a quadrature (AqB) incremental encoder.
Supported Applications
This publication is intended for use on simple velocity control applications with fans, pumps, compressors, and
conveyors.
Rockwell Automation Publication 750-QS100B-EN-P - August 2020 5
Page 6

Preface
Installation
The content of this manual assumes that the drive is installed according to the guidelines in the following publications:
• Wiring and Grounding for Pulse Width Modulated (PWM) AC Drives, publication DRIVES-IN001
• PowerFlex 750-Series Products with TotalFORCE Control Installation Instructions, publication 750-IN100
The following is assumed:
• The drive installation meets mechanical requirements for drive orientation, cooling airflow, and mounting
hardware.
• The drive installation meets environmental requirements for surrounding air temperature, ambient atmosphere,
and the enclosure rating.
• The drive installation meets electrical requirements for AC supply, motor sizing, wiring and grounding, and
overload and short circuit protection.
• The drive installation is compliant with all applicable local, national, and international codes, standards, and
requirements.
Summary of Changes
This publication contains the following new or updated information. This list includes substantive updates only and is
not intended to reflect all changes. Translated versions are not always available for each revision.
Topic Page
Made changes regarding firmware revision 10 Throughout
Reorganized and added information to incorporate steps unique to Flux Vector motor control into the main
start-up procedure
Added information regarding permanent magnet motors 5, 15, 22, 35, 40
Added information regarding synchronous reluc tance motors 5, 15, 22
Added information on Motor Protection Class, Motor Hot Start Coefficient, and Motor Cooling Time parameters 8, 31, 32
Added information regarding oil well applications 15, 23
Added information regarding the Embedded Logic Select parameter 15, 23
Changed the Perform the Direction Test procedures 36
Added Autotune Bandwidth Calculation section for Flux Vector motor control 43
Added After Basic Setup section to reference predictive maintenance and advanced configuration resources 52
Updated status indicator information 54
Added information on calculating AC line impedance for a system with a line reactor 60
Througho ut
6 Rockwell Automation Publication 750-QS100B-EN-P - August 2020
Page 7

Step 1: Gather the Required Information
When you apply power to your drive for the first time, you must enter specific information about your application. This
step helps you to verify that you have the needed information before drive power-up.
Table 1 on page 8
provides a place to record the data you need for the rest of the steps in this document.
Rockwell Automation Publication 750-QS100B-EN-P - August 2020 7
Page 8
Step 1: Gather the Required Information
Record System Data
Record the data that will be used to configure system parameters. This includes motor nameplate data, AC power data,
and other motor data. Use this table to record a descriptive name, and parameter values for each drive/motor
combination. You can record data for up to five drive/motor combinations.
Table 1 - System Data
Drive/Motor Identifier (example, Main Exhaust Fan) Drive/Motor 1: Drive/Motor 2: Drive/Motor 3: Drive/Motor 4: Drive/Motor 5:
Drive Type
❑
❑
755TL
755TR
❑
❑
755TL
755TR
❑
❑
755TL
755TR
❑
❑
755TL
755TR
Drive Catalog Number 20G1 20G1 20G1 20G1 20G1
Transformer Identifier
Port No. Parameter No. Description
(1)
Drive/Motor 1: Drive/Motor 2: Drive/Motor 3: Drive/Motor 4: Drive/Motor 5:
10 400 Motor Nameplate Volts
10 401 Motor Nameplate Amps
10 402 Motor Nameplate Hertz
10 403 Motor Nameplate RPM
10 405 Motor Nameplate Power Units
❑
kW ❑ Hp
❑
kW ❑ Hp
❑
kW ❑ Hp
❑
kW ❑ Hp
10 406 Motor Nameplate Power
10 407 Motor Poles
10 204 Motor Overload Hertz
10 209 Motor Protection Class
10 210 Motor Hot Start Coefficient
10 210 Motor Cooling Time
10 900 Motor Inertia
(2)
(7)
(3)
(4)
(5)
(6)
(kg•m2)
0 33 AC Line Voltage nom (V AC)
13 30 AC Line Frequency nom
❑
50 Hz ❑ 60 Hz❑ 50 Hz ❑ 60 Hz❑ 50 Hz ❑ 60 Hz❑ 50 Hz ❑ 60 Hz❑ 50 Hz ❑ 60 Hz
(50 Hz or 60 Hz)
13 32 AC Line Transformer Rating
(kVA)
13 34 AC Line Impedance (%)
Power jumpers configuration. AC Power Source Grounding
Method
(9)
Braking Chopper (only if used) External Brake Chopper and
(8)
❑
—
❑
—
❑
—
❑
—
DB Resistor Data
Motor Encoder, also known as a
Motor Encoder Data
Feedba ck Device (only if use d)
(1) Motor parameters with descriptions that do not include “Motor Nameplate” are typically not present on the motor nameplate.
(2) See Step 5: Enter Motor Data
(3) See Step 5: Enter Motor Data
(4) See Step 5: Enter Motor Data
(5) See Step 5: Enter Motor Data
(6) See Step 5: Enter Motor Data
(7) Only needed for Flux Vector motor control mode. Methods to determine motor inertia are covered in Step 7: Tune the Motor Side Inverter Control
(8) If your system uses a line reactor, see Calculating AC Line Impedance on page 60
(9) For example, solid (low res), non-solid (high res).
(10) Only needed if a motor encoder is used. For more information, see Appendix A > Line Side Converter Settings on page 57
> Enter Motor Poles on page 30 .
> Enter Motor Overload Her tz on page 31.
> Enter Motor Protec tion Class on page 31.
> Enter Motor Hot Start Coefficient on page 32.
> Enter Motor Cooling Time on page 32.
(10)
❑
—
PPR: _____
.
❑
—
PPR: _____
❑
—
PPR: _____
.
❑
—
PPR: _____
> Enter Motor Inertia on page 39.
❑
755TL
❑
755TR
❑
kW ❑ Hp
❑
—
❑
—
PPR: _____
8 Rockwell Automation Publication 750-QS100B-EN-P - August 2020
Page 9
Step 1: Gather the Required Information
3
4
Sh
Sh
PTC–
PTC+
Ao0–
Ao0+
Ao1–
Ao1+
–10V
10VC
+10V
Ai0–
Ai0+
Ai1–
Ai1+
24VC
+24V
DiC
Di0
Di1
Di2
Di3
Di4
Di5
7
55
66
1
2
1010
89
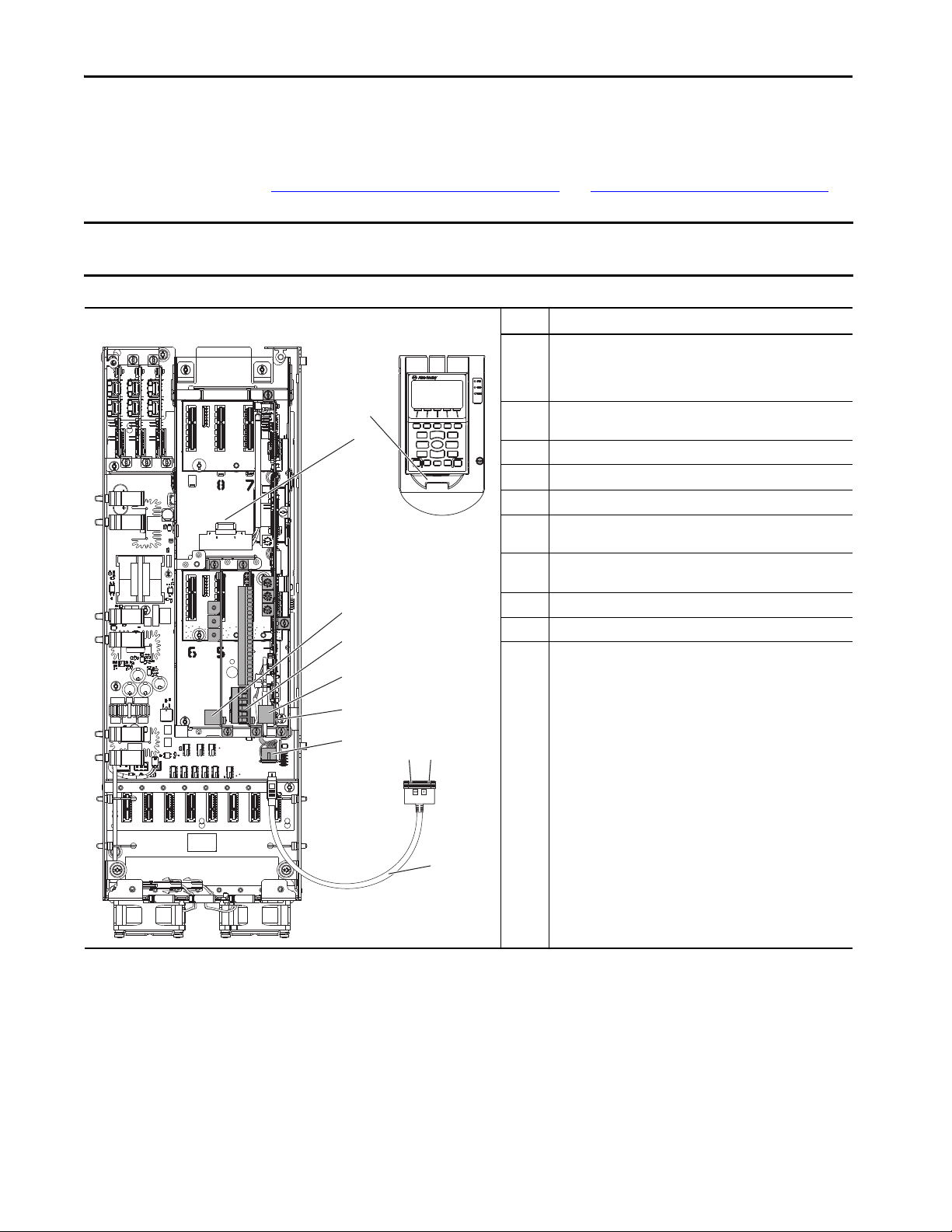
Record Velocity Reference and Start/Stop Sources
Use this diagram to help determine where signal and control sources are connected in each of your drives. You need this
information when you get to Step 8: Set Up Velocity Reference on page 44
IMPORTANT PowerFlex® 755T products use the term ‘port’ to designate (in firmware and software) the physical location where hardware is
located to make it easier to select hardware or functions to program.
and Step 9: Set Up Start/Stop on page 46.
Figure 1 - Basic Subset of Signal Source and Port Locations
Items Descriptions
1 Port 1 connection on the drive-mounted Human Interface Module
(HIM) (The drive-mounted HIM is shown not installed. When it is
installed, the drive-mounted HIM is mounted to the HIM cradle,
connecting at item 2.)
2 Port 1 connection on the HIM cradle (where the drive-mounted HIM
is installed and item 1 connects)
3 Communication option module (shown installed at port 5)
4 Expansion I/O module (shown installed at port 4)
5 Embedded EtherNet/IP™ connectors
6 Terminal block TB1 behind port 0 (the EtherNet/IP port) on the main
control board
7 Port 2 for handheld HIM connection, remote HIM connection, or a
splitter cable (item 10)
8 Splitter cable connection to port 2
9 Splitter cable connection to port 3
10 Splitter cable that connec ts to port 2 (item 7) and provides a port 2
splitter cable connection (item 8) and port 3 splitter cable
connection (item 9)
Rockwell Automation Publication 750-QS100B-EN-P - August 2020 9
Page 10
Step 1: Gather the Required Information
Table 2 - Velocity Reference and Start/Stop Control Sources
(1)
Item
03 Are signal sources connected to a communication option module installed in your drive? If yes, note the catalog number and port number for the module.
Drive 1:
❑
Yes: Port No. _____❑ No
Cat. No.: 20-750-_____
Drive 2:
❑
Yes: Port No._____ ❑ No
Cat. No.: 20-750-_____
Address Information: Address Information: Address Information: Address Information: Address Information:
Drive 3:
❑
Yes: Port No._____ ❑ No
Cat. No.: 20-750-_____
Drive 4:
❑
Yes: Port No._____ ❑ No
Cat. No.: 20-750-_____
Drive 5:
❑
Yes: Port No. _____❑ No
Cat. No.: 20-750-_____
(2)
04 Are signal sources connected to the digital and analog inputs of an I/O option module that is installed in your drive?
If yes, note the catalog number, port number and wiring terminal information for the module.
Drive 1:
❑
Yes: Port No._____ ❑ No
Cat. No.: 20-750-_____
Vel Ref Term: Ai ___
DI 0 Term: _____
DI 1 Term: _____
DI 2 Term: _____
DI 3 Term: _____
DI 4 Term: _____
DI 5 Term: _____
Ao0 Term: _____
Ao1 Term: _____
R0 Term: _____
R1 Term: _____
T0 Term: _____
T1 Term: _____
Drive 2:
❑
Yes: Port No._____ ❑ No
Cat. No.: 20-750-_____
Vel Ref Term: Ai ___
DI 0 Term: _____
DI 1 Term: _____
DI 2 Term: _____
DI 3 Term: _____
DI 4 Term: _____
DI 5 Term: _____
Ao0 Term: _____
Ao1 Term: _____
R0 Term: _____
R1 Term: _____
T0 Term: _____
T1 Term: _____
Drive 3:
❑
Yes: Port No._____ ❑ No
Cat. No.: 20-750-_____
Vel Ref Term: Ai ___
DI 0 Term: _____
DI 1 Term: _____
DI 2 Term: _____
DI 3 Term: _____
DI 4 Term: _____
DI 5 Term: _____
Ao0 Term: _____
Ao1 Term: _____
R0 Term: _____
R1 Term: _____
T0 Term: _____
T1 Term: _____
(3)
Drive 4:
❑
Yes: Port No._____ ❑ No
Cat. No.: 20-750-_____
Vel Ref Term: Ai ___
DI 0 Term: _____
DI 1 Term: _____
DI 2 Term: _____
DI 3 Term: _____
DI 4 Term: _____
DI 5 Term: _____
Ao0 Term: _____
Ao1 Term: _____
R0 Term: _____
R1 Term: _____
T0 Term: _____
T1 Term: _____
05 Is there a connection to the Embedded EtherNet/IP Adapter? If yes, note the IP address and other applicable information.
Drive 1: ❑ Yes ❑ No Drive 2: ❑ Yes ❑ No Drive 3: ❑ Yes ❑ No Drive 4: ❑ Yes ❑ No Drive 5: ❑ Yes ❑ No
Por t No. 0
IP Address:
___:___:___:___
Port No. 0
IP Address:
___:___:___:___
Port No. 0
IP Address:
___:___:___:___
Por t No. 0
IP Address:
___:___:___:___
Drive 5:
❑
Yes: Port No._____ ❑ No
Cat. No.: 20-750-_____
Vel Ref Term: Ai ___
DI 0 Term: _____
DI 1 Term: _____
DI 2 Term: _____
DI 3 Term: _____
DI 4 Term: _____
DI 5 Term: _____
Ao0 Term: _____
Ao1 Term: _____
R0 Term: _____
R1 Term: _____
T0 Term: _____
T1 Term: _____
(4)
Port No. 0
IP Address:
___:___:___:___
Subnet Mask:
___:___:___:___
Gateway Address (if used):
___:___:___:___
Subnet Mask:
___:___:___:___
Gateway Address (if used):
___:___:___:___
Subnet Mask:
___:___:___:___
Gateway Address (if used):
___:___:___:___
Subnet Mask:
___:___:___:___
Gateway Address (if used):
___:___:___:___
Subnet Mask:
___:___:___:___
Gateway Address (if used):
___:___:___:___
01, 02 Are you using the drive HIM to set the speed reference or for Start/Stop control? If yes, note the HIM port number.
Drive 1:
❑
Yes: Port No._____ ❑ No
(1) Item numbers are referenced to the control pod diagram, Figure 1 on page 9.
(2) See the user manual for the communication option module installed in the drive.
(3) See Connections on 11-Series and 22-Series I/O Modules on page 44
wiring diagrams to determine the functions of digital and analog I/O that are wired to various I/O option module terminals. Possible motor side control functions that can be assigned to the digital
inputs include; Stop, Start, and Run. See the PowerFlex Drives with TotalFORCE Control Programming Manual,
publication 750-PM100
(4) See Configure Embedded EtherNet/IP Communication Adapter on page2 6
, for all motor side control functions available for assignment to digital inputs.
Drive 2:
❑
Yes: Port No._____ ❑ No
for information regarding analog I/O parameter assignments. Leave unused digital and analog assignments blank. See application
Drive 3:
❑
Yes: Port No._____ ❑ No
for information regarding methods to set the embedded EtherNet adapter IP address.
Drive 4:
❑
Yes: Port No._____ ❑ No
Drive 5:
❑
Yes: Port No._____ ❑ No
10 Rockwell Automation Publication 750-QS100B-EN-P - August 2020
Page 11
Step 2: Validate the Drive Installation
Step 2: Validate the Drive Installation
It is important that you thoroughly inspect each of your drive installations before applying power for the first time. This
is especially important if you did not personally perform the installation tasks. Verify that each drive is ready to be
energized when you get to Step 3: Power Up, Configure the Modular Control Profiles on page 14
ATTENTION: To avoid an electric shock hazard, the drive must be locked and tagged before you start Step 2: Validate the Drive
Installation. Failure to comply can result in personal injury and/or equipment damage.
.
Rockwell Automation Publication 750-QS100B-EN-P - August 2020 11
Page 12
Step 2: Validate the Drive Installation
Verify the Setting of the ENABLE and SAFETY Jumpers
• If the ENABLE jumper is removed, then to enable the product to operate, you must apply control power to the
main control board, port 0 TB1 terminal <Di0> and <DiC>. No modification of drive parameters is required.
Port 0 TB1 terminal <Di0> becomes the dedicated product enable input. For more information, see the
PowerFlex 750-Series Products with TotalFORCE Control Installation Instructions, publication 750-IN100
• If the SAFETY jumper is removed, install the ENABLE jumper and install a safety option module in a valid
control pod port. Configuring a safety option module is beyond the scope of this document. See the manual for
the safety option that is installed:
– Catalog number 20-750-S: PowerFlex 750-Series Safe Torque Off User Manual, publication 750-UM002
– Catalog number 20-750-S1: Safe Speed Monitor Option Module for PowerFlex 750-Series AC Drives Safety
Reference Manual, publication 750-RM001
– Catalog number 20-750-ATEX: PowerFlex 750-Series ATEX Option Module User Manual,
publication 750-UM003
.
– Catalog number 20-750-S3: PowerFlex 755 Integrated Safety - Safe Torque Off User Manual,
publication 750-UM004
.
– Catalog number 20-750-S4: PowerFlex 755/755T Integrated Safety Functions Option Module, publication
750-UM005
.
.
.
.
1
2
3
4
5
6
9
8
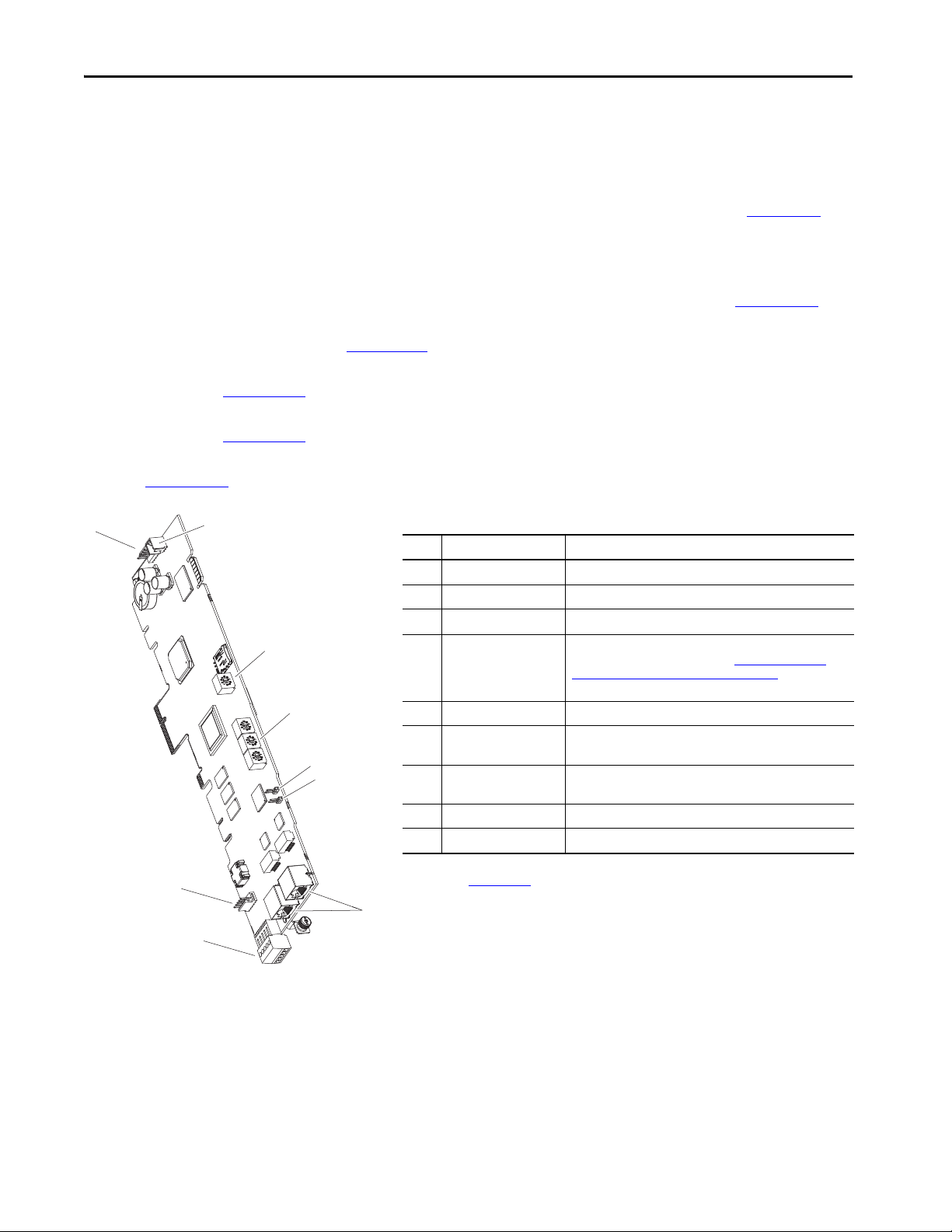
Figure 2 - Main Control Board
Item Name Description
1 HIM Connector DPI port 01 (HIM Cradle) connection.
2 Fan Connector Power supply for internal cooling fan.
3 Control Selector Rotary switch for setting the programming mode.
4 Embedded EtherNet/IP
Address Selectors
5 SAFETY Jumper Safety enable jumper. Removed when safety option is installed.
6 ENABLE Jumper Hardware enable jumper. TB1 becomes an Enable when this
7 Built-in EtherNet/IP
Adapter
8TB1 I/O terminal block.
9 DPI port 2/3 Cable connection for handheld and remote HIM options.
(1) See the PowerFlex Drives with TotalFORCE Control Built-in EtherNet/IP Adapter User Manual,
publication 750COM-UM009
7
(1)
Rotary switches for setting lowest octet of EtherNet address
(forces address to 192.168.1.xxx). See Configure Embedded
EtherNet/IP Communication Adapter on page 26 for instructions
on setting the IP address.
jumper is removed.
A single adapter with dual EtherNet/IP network cable
connecti ons.
.
12 Rockwell Automation Publication 750-QS100B-EN-P - August 2020
Page 13
Step 2: Validate the Drive Installation
Verify Power Source Ratings and Wiring Configurations
The installation must conform with the guidelines that are given in the PowerFlex 750-Series Products with
TotalFORCE Control Installation Instructions, publication 750-IN100
If any of the following conditions exist, confirm that these items have been addressed and that the power source and
cabling is suitable for operation of the PowerFlex 755TL/TR drives.
• The power-source-short-circuit-current capacity must not exceed 100,000 A rms symmetrical amperes at 400/
480/600V systems, and 65,000 A rms symmetrical amperes for 690V systems.
• The PowerFlex 755TL/TR drives must not be used on undersized or high impedance supply systems. The supply
system kVA must be equal to or greater than the drive kW, and the system impedance must be less than 10%.
• Other drives share the AC input source transformer with the PowerFlex 755TL/TR drive, certain measures may
be required for proper operation of the PowerFlex 755TL/TR drive.
• The power source grounding method is not the recommended wye secondary with solid (low resistance) X0
ground with cable that is connected to the drive PE terminal. DC bus conditioning filters and other devices may
be required.
• The motor output cable length is greater than the recommendations in Appendix A of the Wiring and Grounding
for Pulse Width Modulated (PWM) AC Drives, publication DRIVES-IN001
cable length in comparison to the recommendations, consider the following:
– Motor insulation rating
– PWM switching frequency
– Any reflected wave protection devices, such as an RWR filter, if any such devices have been installed
.
. When assessing the motor output
See the Wiring and Grounding for Pulse Width Modulated (PWM) AC Drives, publication DRIVES-IN001
, for
important information regarding installation of AC drives.
Verify Power Wiring
Visually inspect the power wiring connections to each drive. Be sure that you are satisfied that the correct wires are
connected to the input terminals and to the output terminals and are tightened with the correct torque.
See the PowerFlex 750-Series Products with TotalFORCE Control Installation Instructions, publication 750-IN100
more information on where these connections are made and torque requirements.
See the Wiring and Grounding for Pulse Width Modulated (PWM) AC Drives, publication DRIVES-IN001
important information regarding installation of AC drives.
Verify Wiring Drive 1
AC input power is on L1, L2, L3 / R, S, T. ❑❑ ❑❑❑
Output motor connection is on T1, T2, T3 / U, V, W. ❑❑ ❑❑❑
Proper ground wire terminations at PE ground studs. ❑❑ ❑❑❑
The motor output cable length does not exceed the max
recommended length.
Wiring is Correct
❑❑ ❑❑❑
Drive 2
Wiring is Correct
Drive 3
Wiring is Correct
Drive 4
Wiring is Correct
Wiring is Correct
for
, for
Drive 5
Rockwell Automation Publication 750-QS100B-EN-P - August 2020 13
Page 14
Step 3: Power Up, Configure the Modular Control Profiles
Verify Power Jumper Configuration
PowerFlex 755T drives contain protective MOVs and common mode capacitors that are referenced to ground. To guard
against drive damage and/or operation problems, these devices must be configured based on the AC power source
grounding method that is recorded in Tab le 1 on pa ge 8
IMPORTANT The drive-power-source-grounding method must be accurately determined and the jumpers must be configured for the power
source. See the PowerFlex 750-Series Products with TotalFORCE Control Installation Instructions, publication 750-IN100
more information on common power source types. See the Power Jumper Configuration sections for the proper jumper
configuration for your power source and the locations of power jumpers in the drives.
.
for
Drive 1
Power jumpers are
configured correctly.
❑❑❑❑❑
Drive 2
Power jumpers are
configured correctly.
Drive 3
Power jumpers are
configured correctly.
Drive 4
Power jumpers are
configured correctly.
Drive 5
Power jumpers are
configured correctly.
Verify I/O Wiring
To configure a drive correctly, you must know the source of the velocity reference and the start/stop commands. There
are four places where signal sources (such as push buttons, potentiometers, communication network cabling, or HIM)
are connected to the drive:
1. The main control board.
• Embedded EtherNet/IP port
• Terminal block TB1 (Di0)
2. An I/O option module. This is where an analog input or preset speed would connect.
3. A communication option module.
4. A HIM.
Step 3: Power Up, Configure the Modular Control Profiles
In this step, you power up the drive and configure the drive modular control profiles and system properties. Modular
Control Profiles are parts of the drive that change to match your application needs. A power cycle or drive reset is
required for the new configuration to be applied. Modular Control Profiles improve the user interface and performance.
14 Rockwell Automation Publication 750-QS100B-EN-P - August 2020
Page 15
Step 3: Power Up, Configure the Modular Control Profiles
Preparation
Use the following table to record your configurations and preferences. See the detailed description below the table for
more information about what to record in this table.
Table 3 - Configurations and Preferences
Drive/Motor Name (example, Main Exha ust Fan)
Por t
Related
No.
Param eter
No.
033 Voltage Class
035 Duty Rating Class
0 46 Velocity Units
0 65 Primary Motor Control Mode
0 70 Application Select
0 72 Embedded Logic Select
10 110 Stop Mode
10 116 Motor Side DC Bus Regulation Mode
(1) Low for 400V and 600V drives. High for 480V and 690V drives. See Enter the Voltage Class on page 20 for more information about this setting.
(2) Depends on the application overload requirements. LD = 110% for 60 s, ND = 110%/150% for 60 s/3 s, HD = 150%/180% for 60 s/3 s. See Enter the Duty Rating on page 21
setting.
(3) Motor control mode options include: Induction Volts Per Hertz, Induc tion Sensorless Vector, Induction Economizer, Induction Flux Vector, Interior Permanent Magnet Flux Vector, Surface Permanent Magnet
Flux Vec tor, Perman ent Magn et Volts Per H ertz, Pe rmanent Magnet Sensorless Vector, Synchronous Reluctance Volts Per Hertz, and Synchronous Reluctance Sensorless Vector. For most applications, select
an SV (Sensorless Vector) or Econ (Econ SV) motor control mode. If your application requires closed loop velocity control with encoder feedback, select an FV (Flux Vector) motor control mode.
See Enter the Motor Control Mode on page22
(4) For most applications, select ‘None‘. See Enter the Application Selection on page 23
(5) For most applications, select ‘None’. S ee Enter the Embedded Logic Selection on page 23
(6) For most applications, select ‘Ramp’. See Enter the Motor Stop Mode on page 24
Device procedure changes parameters that are associated with port 10.
(7) For PowerFlex 755TL drives, select ‘Adjust Frequency’. For PowerFlex 755TR drives, select ‘Disabled’. See Enter the Motor Side Bus Regulation Mode on page 25
parameter 0:65 is changed, then performing a Reset Device procedure changes parameters that are associated with por t 10.
Description Drive/Motor 1: Drive/Motor 2: Drive/Motor 3: Drive/Motor 4: Drive/Motor 5:
(1)
(Low, High)
(2)
(Light Duty [LD], Normal Duty [ND], Heavy
Duty [HD])
(Hertz, RPM)
(3)
(4)
(None, PID, Torque Prove, OilWell Pump)
(5)
(None, DeviceLogix™)
(6)
(Coast, Ramp, Current Limit, Decel Hold)
(7)
(Disabled, Adjust Frequency)
for more information about this
for more information about this setting.
for more information about this setting.
for more information about this setting.
for more information about this setting. If parameter 0:65 (port 0, parameter 65) is changed, then performing a Reset
for more information about this setting. If
Some of the parameters that are listed in Ta b l e 3 require you to reset the device to change the value of the parameter. See
Appendix A > Reset Device on page 53
. The parameters that require reset are listed in Reset Device and Verify the
Configurations on page 25.
Rockwell Automation Publication 750-QS100B-EN-P - August 2020 15
Page 16

Step 3: Power Up, Configure the Modular Control Profiles
ESC
VIEW
REF
PAR #
TEXT
Soft Key Labels
Soft Keys
How to Use the HIM
The PowerFlex 20-HIM-A6 / -C6S HIM User Manual, publication 20HIM-UM001, provides detailed instructions on
how to use the Human Interface Module (HIM) capabilities for configuring PowerFlex 750-Series drive settings.
The PowerFlex 755T product does not support Assisted Startup using the HIM. You must manually select parameters as
directed in the following procedure.
HIM Navigation Keys
The navigation keys are the blue keys (2, 4, 5, 6, 8). The navigation keys are also used for entering numeric values.
•Use the
or
to scroll up or down through selection lists shown on the LCD display.
• Use the or keys to scroll left or right through selection options that are shown on the LCD display.
• Use the key to accept selections.
HIM Soft Keys
The HIM soft keys are the top row of gray unmarked keys. Soft key function depends on context. The function that a key
currently has is shown by the corresponding soft key label at the bottom of the LCD display. When prompted to use a
soft key function, use the key label to determine which soft key button to press.
16 Rockwell Automation Publication 750-QS100B-EN-P - August 2020
Page 17

Step 3: Power Up, Configure the Modular Control Profiles
Stopped
0.00 Hz
AUTO
Fault Code 81
Port 1 DPI Loss
Elapsed Time 01:26:37
– – FAULTED – –
ESC
CLR
HIM Single Function Keys
There are four single-function keys, which are highlighted. Each single-function key always performs only its dedicated
function.
• The key is the drive Start push button.
• The key is the drive Stop push button and can be used to clear alarms and faults.
• The key accesses folder for parameters, diagnostics, memory functions, preferences, and other tasks.
• The key accesses drive control such as jog, direction, auto/manual and other functions.
HIM Alarms and Faults
The HIM displays various alarm and fault codes. When alarm and fault codes display, you have the following options:
• Correct the cause of the fault and then clear the fault code by pressing the drive Stop push button or the CLR soft
key. Once the fault is corrected and cleared, the fault no longer exists, and normal drive operation can resume.
• Do not correct the cause of the fault and just press the drive Stop push button or the CLR soft key. If the fault is
cleared, but not corrected, whatever condition is causing the fault still exists, but the fault is removed from the
HIM display.
• Do not clear faults and just exit the fault screen by pressing the ESC soft key.
Normal drive operation cannot be resumed until any faults that exist are both corrected and cleared. See the PowerFlex
Drives with TotalFORCE Control Programming Manual, publication 750-PM100
for Fault/Alarm code information.
Rockwell Automation Publication 750-QS100B-EN-P - August 2020 17
Page 18

Step 3: Power Up, Configure the Modular Control Profiles
00
Stopped
0.00 Hz
AUTO
Host Drive
480V 740 A
20G...D740
ESC
REF TEXT
PAR#PAR#
Navigating to a Port and Parameter
Throughout this document you are prompted to ‘Navigate to parameter nn:xxxx [name]’. ‘Parameter nn:xxxx’ means
port nn, parameter xxxx. When prompted to access a parameter, use the following procedure.
1. From the Status screen, use the or navigation keys to scroll to the indicated port number.
2. Press the PAR# soft key.
3. Use the numeric keys to enter the indicated parameter number. Entry of leading zeroes is not required.
4. Press the ENTER soft key.
Edit a value
When prompted to Edit a value, use the following procedures.
1. When the parameter display screen appears, press the EDIT soft key.
2. Depending on the parameter properties, you can enter the parameter value directly with the numeric keys or there
may be a list of available selections.
If there is a list of available selection use the HIM navigation keys or , to scroll up or down
through selection list that is shown on the LCD display.
Other settings such as bit selections use the HIM navigation keys or to scroll let or right to the
indicated value or bit number.
3. To accept the entered data or selection, press the ENTER soft key.
Depending on the parameter properties, there may be multiple selection lists that appear each time you press the
ENTER soft key.
4. If you do not want to accept a value or selection, press the ESC soft key.
5. To return to the Status screen, press the ESC soft key. Multiple presses may be required.
18 Rockwell Automation Publication 750-QS100B-EN-P - August 2020
Page 19
Step 3: Power Up, Configure the Modular Control Profiles
Power the Drive
Use one of the following procedures to energize your drive.
ATTENTION: Power must be applied to the drive to perform the following start-up procedure. Some of the voltages present are
at incoming line potential. To avoid electric shock hazard or damage to equipment, allow only qualified service personnel to
perform the following procedure. Thoroughly read and understand the procedure before beginning.
For Drives Without 24V Auxiliary Power
1. Energize the 3-phase power source to the drive.
2. For Frames 7…15, turn the Fused Disconnect handle on the drive input bay to the ON position.
3. After the drive boots up, if there are any faults, correct and clear them.
TIP The drive should remain energized for the next procedure, but if you ever want to de-energize the drive, do so as follows:
1. For Frames 7…15, turn the Fused Disconnect handle on the drive input bay to the OFF position.
2. De-energize the 3-phase power source to the drive.
For Drives With 24V Auxiliary Power
1. Energize the three-phase power source to the drive.
2. For Frames 7…15, turn the Fused Disconnect handle on the drive input bay to the ON position.
3. After the drive boots up, if there are any faults, correct and clear them.
4. Energize the 24V Auxiliary Power supply source.
5. Keep the 24V Auxiliary Power source energized even if the AC power is de-energized. This maintains operation of
the control pod port devices and communication adapters.
TIP The drive should remain energized for the next procedure, but if you ever want to de-energize the drive, do so as follows:
1. For Frames 7…15, turn the Fused Disconnect handle on the drive input bay to the OFF position.
2. De-energize the 3-phase power source to the drive.
Rockwell Automation Publication 750-QS100B-EN-P - August 2020 19
Page 20
Step 3: Power Up, Configure the Modular Control Profiles
Stopped
0.000 Hz
AUTO
Select Language to Use
English
Francaise
Espanol
Italiano
ENTER
Select the Language
If you are prompted to select the language, use the following procedure.
1. Use the HIM navigation keys to scroll through the list of selections to highlight the desired display language.
2. To accept the setting, press the ENTER soft key.
Configure the Motor Side Inverter
IMPORTANT If the drive was previously configured for a different application, and is being repurposed for this application, you must reset the
parameters to factory defaults. Do this before configuring the motor side inverter. See Appendix A > Setting Factory Defaults on
page 55.
Enter the following data, which was gathered in Table 3 on page 15.
IMPORTANT Some parameter settings and related control mode changes only take effect after you perform a Reset Device procedure. You
only need to perform the Reset Device procedure once, after entering all settings to configure the motor side inverter.
Enter the Voltage Class
A change to this parameter is needed only when you are applying a drive on a voltage other than what the catalog number
specifies.
• For 400/480V products, ‘Low Voltage’ selects 400V and ‘High Voltage’ selects 480V.
• For 600/690V products, ‘Low Voltage’ selects 600V and ‘High Voltage’ selects 690V.
1. Navigate to parameter 0:33 [VoltageClass Cfg].
2. Press the EDIT soft key.
3. Edit the value to either 0 ‘Low Voltage’ or 1 ‘High Voltage’, choosing the option corresponding to the data
collected in Ta b l e 3
4. Press the ENTER soft key.
20 Rockwell Automation Publication 750-QS100B-EN-P - August 2020
.
Page 21

Step 3: Power Up, Configure the Modular Control Profiles
Enter the Duty Rating
The duty class parameter allows you to select the continuous and overload modes of operation. The value of this
parameter affects the continuous current rating of the drive.
• Normal Duty (ND) - Selects the normal continuous rating, with overload ratings of 110% for 60 seconds and
150% for 3 seconds.
• Heavy Duty (HD) - Provides a lower continuous rating, with overload ratings of 150% for 60 seconds and 180%
for 3 seconds.
• Light Duty (LD) - provides the highest continuous rating, with an overload rating of 110% for 60 seconds. Not
available on all drive ratings.
1. Navigate to parameter 0:35 [Duty Rating Cfg].
2. Press the EDIT soft key.
3. Edit the value to 0 ‘Normal Duty’, 1 ‘Heavy Duty’, or 2 ‘Light Duty’, choosing the option corresponding to the data
collected in Table 3 on page 15
4. Press the ENTER soft key.
.
Enter the Velocity Units
This parameter allows you to select either Hertz (Hz) or Revolutions per Minute (RPM) as the units for velocity (speed).
1. Navigate to parameter 0:46 [Velocity Units].
2. Press the EDIT soft key.
3. Edit the value to 0 ‘Hz’ or 1 ‘RPM’, choosing the option corresponding to the data collected in Ta b l e 3
4. Press the ENTER soft key.
.
Rockwell Automation Publication 750-QS100B-EN-P - August 2020 21
Page 22

Step 3: Power Up, Configure the Modular Control Profiles
Enter the Motor Control Mode
Setting the motor control mode determines how the drive controls the motor. There are four basic control modes. Some
of them have different variations for different motor types. The four basic modes are as follows:
• Volts per Hertz (VHz) - The most basic form of motor control. Useful for variable torque applications such as
pumps, fans, and multiple motors in parallel.
• Sensorless Vector (SV) - An enhanced form of VHz control with better low speed operation and better torque
control at low frequencies. Useful for variable torque and simple constant torque applications. If you choose an SV
control mode, we recommend that you run a Motor ID test.
• Economize (Econ) - An enhanced form of Sensorless Vector control designed to reduce energy consumption when
the drive is not accelerating. If you choose Econ, we recommend that you run a Motor ID test.
• Flux Vector (FV) - The highest performance control mode. A control mode that is designed for precise Torque,
Velocity, and/or Position regulation. Usually uses a motor feedback device. Useful for variable torque, constant
torque, and constant power applications. Provides precise position and velocity tracking. Provides excellent
disturbance rejection. This mode is required for position and load sharing applications. If you choose an FV
control mode, it is required that you run a Motor ID test. You may also have to run a Motor Inertia test. We
recommend that you use a Flux Vector control mode for both encoder and encoderless control of permanent
magnet motors.
For the control modes where a Motor ID test or Motor Inertia is recommended or required, these tests are performed
during Step 7: Tune the Motor Side Inverter Control on page 35
.
The motor-type-specific motor control modes are as follows. Choose from these options based on your type of motor
and application:
• Induction Volts Per Hertz (InductionVHz)
• Induction Sensorless Vector (Induction SV)
• Induction Economize (Induct Econ)
• Induction Flux Vector (Induction FV)
• Interior Permanent Magnet Flux Vector (IPM FV)
• Surface Permanent Magnet Flux Vector (SPM FV)
• Permanent Magnet Volts Per Hertz (PM VHz)
• Permanent Magnet Sensorless Vector (PM SV)
• Synchronous Reluctance Volts Per Hertz (SynR VHz)
• Synchronous Reluctance Sensorless Vector (SynR SV)
1. Navigate to parameter 0:65 [Pri MtrCtrl Mode].
2. Press the EDIT soft key.
3. Edit the value to one of the following, choosing the option corresponding to the data collected in Table 3 on
page 15: 1 ‘InductionVHz’, 2 ‘Induction SV’, 3 ‘Induct Econ’, 4 ‘Induction FV’, 5 ‘IPM FV’, 6 ‘SPM FV’, 7 ‘PM
VHz’, 8 ‘PM SV’, 9 ‘SynR VHz’, or 10 ‘SynR SV’.
4. Press the ENTER soft key.
22 Rockwell Automation Publication 750-QS100B-EN-P - August 2020
Page 23

Step 3: Power Up, Configure the Modular Control Profiles
Enter the Application Selection
You can add Process PID, Torque Prove, or Oil Well Pump application functionality to determine which application
parameters are present in virtual port 9. This is only needed when you are using Process PID, Torque Prove, or Oil Well
Pump. The following options are available:
• None - leaves port 9 empty. This is the default setting
• Process PID only - provides a PID regulator for process applications in port 9. Use Process PID for pressure or
flow transducers on fan or pump applications; you can also use it for tension transducers on winding applications.
• Torque Prove - provides a mechanism for coordinating the motor and mechanical brake on lifting applications.
This selection loads these parameters and the Process PID parameters into port 9.
• Oil Well Pump - provides a mechanism for pump jack and progressive cavity pump applications
1. Navigate to parameter 0:70 [Application Sel].
2. Press the EDIT soft key.
3. Edit the value to 0 ‘None’, 1 ‘ProcPID Only’, 2 ‘Torque Prove’, or 3 `OilWell Pump', choosing the option
corresponding to the data collected in Table 3 on page 15
4. Press the ENTER soft key.
.
Enter the Embedded Logic Selection
Selecting DeviceLogix as the embedded logic source loads embedded logic parameters into port 9 following a reset or
power cycle. These parameters contain the default values.
1. Navigate to parameter 0:72 [Emb Logic Select].
2. Press the EDIT soft key.
3. Edit the value to 0 ‘None’ or 1 ‘DeviceLogix’, choosing the option corresponding to the data collected in Ta b l e 3
4. Press the ENTER soft key.
.
Rockwell Automation Publication 750-QS100B-EN-P - August 2020 23
Page 24

Step 3: Power Up, Configure the Modular Control Profiles
Enter the Motor Stop Mode
Select how the drive executes a stop command. For operation with a controller, Stop Mode A (parameter 10:110
[Mtr Stop Mode A]) defines the method that is used for a Normal Stop. The default motor stop mode is ‘Ramp’.
• Coast - the motor side inverter immediately stops modulating (stops gating its power devices), and stops the motor
side inverter from powering the motor. In most applications, Coast causes the motor to coast to a standstill.
• Ramp - the motor side inverter decelerates the motor from the Base speed to the Zero Speed threshold,
10:146 [Zero Speed Limit]. Active Decel Time (10:1917 [VRef Decel Time1] or 10:1918
[VRef Decel Time2]) controls the rate of deceleration. Active Decel Time sets the amount of time it takes for the
motor to decelerate from Base speed to the Zero Speed threshold. Once the motor reaches the Zero Speed
threshold, modulation is stopped (stops gating its power devices). Decel rate is defined as motor Base speed/Decel
time.
• Current Limit - the motor side inverter decelerates the motor at a rate where the Decel Time is 0.1 seconds.
Deceleration does not exceed the Current Limit to stop at this rate.
• Decel To Hold - the motor side inverter decelerates the motor from the Base speed to the Zero Speed threshold,
10:146 [Zero Speed Limit]. Active Decel Time (10:1917 [VRef Decel Time1] or 10:1918
[VRef Decel Time2]) controls the rate of deceleration. Active Decel Time sets the amount of time it takes for the
motor to decelerate from Base speed to the Zero Speed threshold. Once the motor reaches the Zero Speed
threshold, the motor side inverter holds by continuing to modulate with a zero speed (zero frequency) output.
Hold continues until there is a new start command, new run command, or another kind of stop command. Decel
rate is defined as motor Base speed/Decel time.
1. Navigate to parameter 10:110 [Mtr Stop Mode A].
2. Press the EDIT soft key.
3. Edit the value to 0 ‘Coast’, 1 ‘Ramp’, 2 ‘Current Lmt’, or 3 ‘DecelToHold’, choosing the option corresponding to
the data collected in Table 3 on page 15
.
4. Press the ENTER soft key.
24 Rockwell Automation Publication 750-QS100B-EN-P - August 2020
Page 25

Step 3: Power Up, Configure the Modular Control Profiles
Enter the Motor Side Bus Regulation Mode
Selects how the motor side inverter attempts to mitigate rising DC bus voltage during motor regeneration.
• Disabled - the motor side inverter does nothing to regulate the DC bus voltage. In this mode, the regenerative line
side converter or an external DC bus voltage control (brake resistor, regen module) is required to regulate the DC
bus voltage during motor regeneration.
– Disabled is the typical setting for a 755TR regenerative drive.
– Disabled is the required setting if you have installed an external brake chopper and dynamic brake resistor.
• Adjust Output Frequency - the motor side inverter adjusts its fundamental output frequency or torque, depending
on the motor control mode, to reduce the amount of motor regeneration. The use of this option may result in
extended deceleration times.
– Adjust Output Frequency is the typical setting for a 755TL low harmonic drive.
– Adjust Output Frequency is default motor side bus regulation mode.
1. Navigate to parameter 10:116 [Bus Reg Mode A].
2. Press the EDIT soft key.
3. Edit the value to 0 ‘Disabled’ or 1 ‘Adjust Freq’, choosing the option corresponding to the data collected in Ta b l e 3
on page 15.
4. Press the ENTER soft key.
Reset Device and Verify the Configurations
For the setting changes you entered earlier to be accepted, you must perform a Reset Device procedure. You can cycle
power to the drive and control pod or use the HIM. See Appendix A > Reset Device on page 53
IMPORTANT You must perform a Reset Device procedure to load the modified values of these parameters.
To verify the configurations, verify the values of the following parameters:
0:34 [VoltageClass Act] 0:47 [Vel Units Act] 0:71 [Application Act]
0:36 [Duty Rating Act] 0:66 [Pri MtrCtrl Act] 0:73 [Emb Logic Act]
, for more information.
Rockwell Automation Publication 750-QS100B-EN-P - August 2020 25
Page 26

Step 3: Power Up, Configure the Modular Control Profiles
Configure Embedded EtherNet/IP Communication Adapter
If you are using a communication adapter, configure the address so that it corresponds to the data collected in Table 2 on
page 10.
If you are using a communication option module (20-750 series), refer to the appropriate 750COM-UM user manual for
more information about setting communication addresses.
See PowerFlex Drives with TotalFORCE Control Built-in EtherNet/IP Adapter User Manual, publication 750COM-
UM009, for more information about configuring the embedded EtherNet/IP adapter.
Active IP addresses are shown in the diagnostic items, parameters 0:49…60.
There are three methods for configuring the embedded EtherNet/IP IP address in the adapter:
1. Adapter Rotary Switches - Use the switches when working on a simple, isolated network (for example,
192.168.1.xxx). The three adapter switches are read when the drive powers up, and represent three decimal digits
from top to bottom (see Figure 3 on page 27
a. Set the rotary switches to a valid address (001-254) corresponding to the data collected in Ta b l e 2
uses that value as the lower octet of its IP address (192.168.1.xxx, where xxx = rotary switch settings), along
with a subnet mask of 255.255.255.0. No gateway is configured. Also, the setting for adapter parameter 0:300
[Net Addr Sel] is automatically ignored.
b. To accept the changes to IP address switches, perform a Reset Device procedure. See Appendix A > Reset
Device on page 53 for more information.
).
. The adapter
2. BOOTP or DHCP Server - If you prefer to control the IP addresses of devices using a server, use BOOTP/
DHCP. The IP address, subnet mask, and gateway addresses are then provided by the BOOTP/DHCP server. If
the address is invalid, DHCP is used.
3. Adapter Parameters - Use adapter parameters when you want more flexibility in configuring the IP address, or
when you must communicate outside the control network using a gateway. When adapter parameters are used, the
IP address, subnet mask, and gateway addresses come from the adapter parameters you set.
a. Set the adapter rotary switches to 999. See Figure 3
and their related descriptions.
b. Navigate to parameter 0:300 [Net Addr Sel]. Press the EDIT soft key. Edit to a value of 1 'Parameters'. Press the
ENTER soft key.
c. Navigate to parameters 0:302…305 [IP Addr Cfg 1…4]. Press the EDIT soft key. Edit the value of each IP
address octet corresponding to the data collected in Ta b l e 2
IP address to 10.20.3.123, you would set the parameters as follows:
– 0:302 [IP Addr Cfg 1] = 10
– 0:303 [IP Addr Cfg 2] = 20
– 0:304 [IP Addr Cfg 3] = 3
– 0:305 [IP Addr Cfg 4] = 123
and its accompanying table for all possible switch settings
. Press the ENTER soft key. For example, to set the
26 Rockwell Automation Publication 750-QS100B-EN-P - August 2020
Page 27

Step 3: Power Up, Configure the Modular Control Profiles
Hundreds
Ten s
Ones
d. Navigate to parameters 0:306…309 [Subnet Cfg 1…4] corresponding the data collected in Ta ble 2 on page 10.
Press the EDIT soft key. Edit the value of each subnet mask octet. Press the ENTER soft key. The subnet mask
cannot be set to 0.0.0.0. If you set the subnet incorrectly, the drive uses DHCP.
e. Navigate to parameters 0:310…313 [Gateway Cfg 1…4] corresponding to the data collected in Ta b l e 2
. Press
the EDIT soft key. Edit the value of each gateway address octet. Press the ENTER soft key.
If the gateway address is set to 0.0.0.0, the drive can only communicate with devices on the same subnet as the
drive. It is not able to communicate with devices on other subnets. If the gateway address is not set to 0.0.0.0,
then it must be set to an address that is on the same subnet as the IP address of the drive. If you set the gateway
incorrectly, the drive uses DHCP.
f. To accept the changes to the switch and parameter settings, perform a Reset Device procedure. See Appendix A
> Reset Device on page 53
for more information.
g. Verify the entered values of parameters 0:301…313. Active IP addresses are shown in the diagnostic items,
parameters 0:49…60.
IMPORTANT Regardless of the method used to set the IP address on the adapter, each node on the EtherNet/IP network must have a unique
IP address. To accept IP address changes, you must perform a Reset Device procedure.
Set the Embedded Ethernet Adapter IP Address Switches
Set the embedded Ethernet adapter IP address switches using Figure 3 and the information in Ta b l e 4 .
Figure 3 - Location of Ethernet Adapter IP Address Switches
Table 4 - Ethernet Adapter IP Address Switches
Possible Settings Description
000, 255…887,
889…999
001…254 Adapter uses the rotary switch settings for the IP address (192.168.1.xxx, where xxx = rotary switch settings).
888 Resets the adapter IP address function to factory defaults. This setting also resets most parameters to factory defaults on a drive or bus supply.
(1) 999 is the default setting and disables the rotary switches.
(1)
Adapter uses, depending on 0:300 [Net Addr Sel], BOOTP setting, DHCP setting, or the adapter parameter settings for the IP address.
Thereafter, the drive must be powered down, the switches set to a setting other than 888, and then the drive must be powered up again to accept the
new address.
Rockwell Automation Publication 750-QS100B-EN-P - August 2020 27
Page 28

Step 4: Configure the Line Side Converter
Step 4: Configure the Line Side Converter
In this step, you configure the line side converter. The line-side-converter-regulation parameters can usually be left at the
default values. If you are having issues or alarm/faults, refer to Appendix A > Line Side Converter Settings on page 57
Enter Line Side Converter Settings
1. Navigate to parameter 13:30 [Nom Line Freq]. Press the EDIT soft key.
.
2. Edit the nominal line frequency in Hertz, corresponding to the data collected in Table 1 on pag e 8
3. Press the ENTER soft key.
4. Navigate to parameter 13:32 [AC Line kVA A]. Press the EDIT soft key.
5. Edit the supply transformer power rating in kVA, corresponding to the data collected in Ta b l e 1
6. Press the ENTER soft key.
7. Navigate to parameter 13:34 [AC Line Imped% A]. Press the EDIT soft key.
8. Edit the power source line impedance in percent, corresponding to the data collected in Ta b l e 1
9. Press the ENTER soft key.
10. At this point, the basic line side converter settings required for most applications are configured. You may
configure additional parameters such as:
• Current Rate Limit, parameter 10:227 [Current Rate Lim].
• Regen Power Limit, parameter 10:229 [Regen Power Lim]. Only for Flux Vector motor control modes.
• Motor Power Limit, parameter 10:230 [Motor Power Lim]. Only for Flux Vector motor control modes.
To determine the settings for these parameters, refer to either of the following:
• Connected Components Workbench™ (version 11 or later) software and the associated PowerFlex 755T
Startup Wizard.
• The PowerFlex Drives with TotalFORCE Control Programming Manual, publication 750-PM100
.
.
.
.
28 Rockwell Automation Publication 750-QS100B-EN-P - August 2020
Page 29

Step 5: Enter Motor Data
Step 5: Enter Motor Data
In this step, you configure the Motor Side Inverter Control using the motor data recorded in Ta b l e 1 on pag e 8 .
Enter Motor Nameplate Data
1. Navigate to parameter 10:400 [Motor NP Volts]. Press the EDIT soft key.
2. Edit the motor nameplate voltage to match the data recorded in Tab l e 1
3. Press the ENTER soft key.
4. Navigate to parameter 10:401 [Motor NP Amps]. Press the EDIT soft key.
5. Edit the motor nameplate full load current in amps, to match the data collected Ta b l e 1
key.
6. Navigate to parameter 10:402 [Motor NP Hertz]. Press the EDIT soft key.
7. Edit the motor nameplate fundamental frequency in Hertz, to match the data collected Ta b l e 1
8. Press the ENTER soft key.
9. Navigate to parameter 10:403 [Motor NP RPM]. Press the EDIT soft key.
10. Edit the motor nameplate base speed in RPM, to match the data collected Tab l e 1
11. Press the ENTER soft key.
12. Navigate to parameter 10:405 [Mtr NP Pwr Units]. Press the EDIT soft key.
13. Edit the value to 0 ‘HP’ or 1 ‘kW’, to match the motor nameplate power units collected Ta b l e 1
14. Press the ENTER soft key.
15. Navigate to parameter 10:406 [Motor NP Power]. Press the EDIT soft key.
16. Edit the motor nameplate power, to match the data collected Ta b l e 1
.
. Press the ENTER soft
.
.
.
.
17. Press the ENTER soft key.
Rockwell Automation Publication 750-QS100B-EN-P - August 2020 29
Page 30

Step 5: Enter Motor Data
Enter Motor Poles
If the number of motor poles is not on the motor nameplate, contact the motor manufacturer and confirm the number of
motor poles. The number of motor poles is ALWAYS an even integer multiple of 2.
Use this table to help determine the number of poles. The motor NP RPM is always less than the Sync RPM by the
amount of motor slip RPM. If the motor NP Hertz is not 50 Hz or 60 Hz, or if the motor has a low NP RPM, contact
the motor manufacturer and confirm the number of poles.
No. Poles Sync RPM
NP Hertz = 60 Hz
2 3600 3000
4 1800 1500
6 1200 1000
8900750
10 720 600
12 600 500
Sync RPM
NP Hertz = 50 Hz
1. Navigate to parameter 10:407 [Motor Poles]. Press the EDIT soft key.
2. Edit the number of motor poles to match the data collected Ta b l e 1 o n pa g e 8
.
3. Press the ENTER soft key.
30 Rockwell Automation Publication 750-QS100B-EN-P - August 2020
Page 31

Step 5: Enter Motor Data
Enter Motor Overload Hertz
The motor OL Hertz is typically not on the motor nameplate. This information is available from the motor
manufacturer data sheets. Motor OL Hertz is the fundamental frequency below which the motor cannot deliver rated
torque continuously without the possibility of overheating. This is sometimes referred to as the 'speed turn-down ratio'.
Self-cooled motors with Totally Enclosed Non-Ventilated (TENV) enclosures, Drip Proof Guarded (DPG) enclosures,
and Totally Enclosed Fan Cooled (TEFC) enclosures, have shaft driven cooling fans. These fans cannot produce the
volume and pressure of cooling air that is required to produce rated motor torque continuously, without the motor
overheating when operated below the minimum speed turn-down frequency. Motors with separately powered cooling
fans, such as those with Totally Enclosed Blower Cooled (TEBC) enclosures, and Drip Proof Guarded Force Ventilated
(DPG-FV) enclosures, can typically be operated to zero speed without overload Hertz derating.
For example, a 60 Hz base speed TEFC motor with 4:1 speed turndown ratio can only produce rated torque
continuously down to 60 Hz / 4 = 15 Hz. In this example, parameter 10:204 [Mtr OL Hertz] would be set to 15 Hz.
Another example is a 60 Hz base speed TEBC blower cooled motor with a 1000:1 speed turndown ratio. In this case,
parameter 10:204 [Mtr OL Hertz] would be set to 60 Hz / 1000 = 0.06 Hz or 0 Hz.
Setting parameter 10:204 [Mtr OL Hertz] does not affect the drives capability to deliver motor current or limit output
current in any way. Parameter 10:204 only sets the threshold where the motor overload counter begins to increment.
1. Navigate to parameter 10:204 [Mtr OL Hertz]. Press the EDIT soft key.
2. Edit the overload threshold frequency in Hertz, based on the data collected in Ta ble 1 on page 8
calculations. Press the ENTER soft key.
and the previous
Enter Motor Protection Class
This parameter is available in firmware revision 10 and higher. The motor protection class, or trip class, defines the
length of time it takes to trip the system in an overload condition. The Motor Protection Class parameter can have a
value between 1 and 60. This value is the maximum number of seconds until the motor trips off when it is in an overload
condition. An overload condition is defined as the current being over 600% of the maximum thermal current rating (or
600% of the actual dial setting on adjustable overloads). So if the motor current is over 600% of the maximum thermal
current rating, and the motor protection class is 60, the motor will trip in 60 seconds or less.
The default value for Motor Protection Class is 11. Many industrial loads, particularly high inertia loads, require Class
30. Use a protection class appropriate for your application, considering motor thermal curves, operating conditions, and
inertia of the load. For more information on motor protection class, refer to the Low Voltage Motor Protection White
Paper, publication 193-WP008
1. Navigate to parameter 10:209 [Mtr Protn Class]. Press the EDIT soft key.
2. Enter the Motor Protection Class that is recorded in Ta ble 1 on pag e 8
. To set Motor Protection Class, use the following procedure.
. Press the ENTER soft key.
Rockwell Automation Publication 750-QS100B-EN-P - August 2020 31
Page 32

Step 5: Enter Motor Data
Enter Motor Hot Start Coefficient
This parameter is available in firmware revision 10 and higher. The Motor Hot Start Coefficient parameter allows you to
set the hot state overload curve to some percent of the cold curve representing the motor protection class. This
accommodates requirements for both cold start and hot start. Running from a cold state, the cold curve is used. The
motor is considered to be in a hot state if it has been running above the rated current for at least 20 minutes. Once the
motor is considered to be in a hot state, the hot curve is used for any overload condition. The parameter can have a value
in the range of 0.1…1. A value of 1 makes the hot state overload curve equivalent to the cold curve. A value of 0.1 makes
the hot state overload curve equivalent to 10% of the cold curve.
The default value for Motor Hot Start Coefficient is 0.33. To set Motor Hot Start Coefficient, use the following
procedure.
1. Navigate to parameter 10:210 [Mtr HotStrtCoeff ]. Press the EDIT soft key.
2. Enter the Motor Hot Start Coefficient that is recorded in Table 1 on page 8
. Press the ENTER soft key.
Enter Motor Cooling Time
This parameter is available in firmware revision 10 and higher. The Motor Cooling Time parameter allows you to set the
decay time for the motor to go from a hot state to a cool state. The parameter value is the time in minutes. The motor is
considered to be in a hot state if it has been running above the rated current for at least 20 minutes. A hot state occurs
when a motor overload condition appears and the overload count reaches 100%. If the motor was just in a hot state, and
is no longer running above the rated Amps, the motor cooling time begins. This could be because the motor was tripped
off due to an overload, was turned off by a user, or it could still be running, but below the rated Amps. Once the full
length of the motor cooling time has passed, the motor overload count reaches 0%, and the motor is considered to be in a
cool state.
The default value for Motor Cooling Time is 20 minutes. To set Motor Cooling Time, use the following procedure.
1. Navigate to parameter 10:211 [Mtr Cooling Time]. Press the EDIT soft key.
2. Enter the Motor Cooling Time in minutes, that is recorded in Table 1 on page 8
. Press the ENTER soft key.
32 Rockwell Automation Publication 750-QS100B-EN-P - August 2020
Page 33

Step 6: Set Up Velocity Feedback for Flux Vector Control
Step 6: Set Up Velocity Feedback for Flux Vector Control
Perform this step only if your application uses Flux Vector motor control and closed loop (encoder) feedback. If your
application uses open loop (encoderless) feedback, skip this section. Default velocity feedback values are for open loop
feedback, so no setup is required for open loop feedback.
Record Encoder Information
If your application uses Flux Vector motor control and closed loop (encoder) feedback, record the system information for
the encoder feedback option modules and wiring terminals in Ta b l e 5
.
Additional information is available in PowerFlex 755T Flux Vector Tuning, publication 750-AT006
.
Examples of wiring encoder feedback devices to option modules can be found in the PowerFlex 750-Series I/O,
Feedback, and Power Option Modules Installation Instructions, publication 750-IN111
Table 5 - Encoder Information
Enter the encoder feedback module catalog number, port number, and wiring terminals.
Drive 1: _____
Port No. _____
Cat. No.: 20-750- ________
Encoder Term: _____ A…Z
Drive 2:_____
Port No. _____
Cat. No.: 20-750-________
Encoder Term:_____ A…Z
Drive 3:_____
Port No. _____
Cat. No.: 20-750- ________
Encoder Term:_____ A…Z
Drive 4:_____
Port No. _____
Cat. No.: 20-750- ________
Encoder Term: _____ A…Z
.
Drive 5:_____
Port No. _____
Cat. No.: 20-750-________
Encoder Term: _____ A…Z
Rockwell Automation Publication 750-QS100B-EN-P - August 2020 33
Page 34

Step 6: Set Up Velocity Feedback for Flux Vector Control
Configure Motor Encoder Velocity Feedback
This procedure is needed only if you are using closed loop Flux Vector motor control with a motor-incremental-encoderfeedback device. In this procedure, you configure the motor incremental encoder feedback.
1. Navigate to parameter 10:1000 [Pri Vel Fb Sel] and press the EDIT soft key.
2. Edit the value to assign the encoder module port and feedback parameter number for the velocity feedback,
corresponding to the encoder terminal connections you recorded in Table 1 on pag e 8
Example: Suppose that the encoder is wired to terminals <1A…1Z> of the dual encoder feedback module
(20-750-DENC-1) in port 5. In this case, you would do the following:
Navigate to parameter 10:1000 [Pri Vel Fb Sel]. Press the EDIT soft key. Edit the value using the HIM navigation
keys to select the encoder module in port 5. Press the ENTER soft key. Use the HIM navigation keys to select
parameter 5:14 [Enc 1 FB]. Press the ENTER soft key.
3. Navigate to the port and parameters for the encoder feedback option module. Press the EDIT soft key.
. Press the ENTER soft key.
4. Edit the parameter values to the value required for the application and corresponding to data recorded in Ta b l e 1
Press the ENTER soft key. For more information about setting these parameters, see the PowerFlex Drives with
TotalFORCE Control Programming Manual, publication 750-PM100
Example: Continuing the example in step 2
5:11 [Enc1 Cfg], 5:12 [Enc1 PPR], and 5:13 [Enc 1 FB Lss Cfg].
Examples of wiring encoder feedback option modules can be found in the PowerFlex 750-Series I/O, Feedback, and
Power Option Modules Installation Instructions, publication 750-IN111
, you would navigate to port 5 and edit values for these parameters:
.
.
.
34 Rockwell Automation Publication 750-QS100B-EN-P - August 2020
Page 35

Step 7: Tune the Motor Side Inverter Control
Step 7: Tune the Motor Side Inverter Control
In this step, you tune the motor side inverter control by using HIM Autotune routines and entering some values that are
derived from the motor nameplate or motor data sheet.
These tests require use of the HIM Start key . Verify that parameter 0:41 [Logic Mask] bits 01…03 are enabled (set
to '1') to allow operation with the HIM port you are using. See Appendix A > Disable the HIM Start Function on
page 59 for more information.
IMPORTANT During this test, the drive uses an internal reference that is positive (forward). During operation and other tests, the drive uses
an external reference that you select. An external reference can include the HIM, analog input, or communicated reference. The
direction of rotation depends on the polarity (direction) of that external reference. Make sure the external reference moves the
motor in the intended direction.
IMPORTANT If you are using a motor feedback device and you are using automatic tach switch over, parameter 10: 1019 [FB Loss Action] is
set for ‘Auto Tach SW’, and the autotune must be performed twice. Once with the motor feedback device and once without.
Enable the HIM Start Key
Some autotune tests require use of the HIM Start key . To enable Start key operation with the HIM port you are
using, ensure that parameter 0:41 [Logic Mask] bits 01…03 are enabled (set to '1'). See Appendix A > Disable the HIM
Start Function for more information.
Set Maximum Velocity for Permanent Magnet Motor
If you have a permanent magnet motor application using firmware revision 6 or lower, perform the following procedure
before you run autotune tests.
IMPORTANT If you have a permanent magnet motor application using firmware revision 10 or higher, do not perform this procedure. In
revision 10 and higher, parameter 10:691 [PM Bus Prot] and parameter 10:699 [PM Vel Max] are set as a percentage of motor
nameplate RPM or a percentage of motor nameplate Hertz. These parameters are defaulted to 100%, so they are set correctly
for a permanent magnet motor application by default.
1. Navigate to parameter 10:691 [PM Bus Prot]. Press the EDIT soft key.
2. Enter either the Motor Nameplate RPM or Hertz, depending on the velocity unit selection in parameter 0:46
[Velocity Units]. If unit conversion is necessary, see the formula in Step 5: Enter Motor Data on page 29
Enter soft key.
Rockwell Automation Publication 750-QS100B-EN-P - August 2020 35
. Press the
Page 36

Step 7: Tune the Motor Side Inverter Control
3. Navigate to parameter 10:699 [PM Vel Max]. Press the EDIT soft key.
4. Enter the same value you entered for parameter 10:691. Press the Enter soft key.
Perform the Direction Test
This procedure is for use with Flux Vector motor control mode.
1. Navigate to parameter 10:910 [Autotune]. Press the EDIT soft key.
2. Edit the value to 1 'Direction Test'. Press the Enter soft key.
3. To start motor rotation, press the Start key . The maximum motor speed during the test is 5 Hz.
You can stop motor rotation at any time during this test by pressing the Stop key .
4. To determine whether the current forward direction is the forward direction that the application requires, observe
the motor direction.
If the direction is as required, proceed to step 7
5. Change the motor forward rotation direction.
If the motor direction is opposite from application requirements, you have two alternatives:
• Stop the drive, shutdown, and safely lockout drive power sources. Exchange any two motor output leads on the
drive output.
• Navigate to parameter 10:420 [Mtr Cfg Options]. Press the EDIT soft key. Use the HIM navigation keys to
select bit 4. Enter a value of 1. Press the ENTER soft key. This electronically reverses the phase rotation of the
applied voltage, effectively reversing the direction of rotation.
IMPORTANT If you reset parameters to defaults, this parameter is reset to 0 and the motor may rotate in the incorrect direction.
6. Perform step 1
application.
through step 4 again to verify that the motor direction is now the direction that is required by the
. If the direction is opposite from required, proceed to step 5.
36 Rockwell Automation Publication 750-QS100B-EN-P - August 2020
Page 37

Step 7: Tune the Motor Side Inverter Control
7. Perform this step only if Flux Vector motor control is used. Address the motor velocity feedback polarity as
follows:
IMPORTANT If you are using another type of motor velocity feedback device, and/or the universal feedback
option module, the parameter numbers may be different than described here. See the PowerFlex
750-Series I/O, Feedback, and Power Option Modules Installation Instructions,
publication 750-IN111
, for more information about feedback option modules.
a. Ascertain by observation whether parameter 10:1044 [Motor Vel Fb] is positive (+) or negative (-) for the
application forward rotation direction.
b. Do one of the following:
• If the motor velocity feedback polarity is positive (+) for the application forward rotation direction, this test
is complete.
• If the motor velocity feedback polarity is negative (-) when the motor is rotating in the forward application
direction, proceed to the next substep.
c. Change the feedback polarity using one of the following two options:
• Stop the drive, shutdown, and safely lockout drive power sources. Exchange the encoder A and Anot wires
on the encoder module terminal board.
• Set the encoder configuration parameter to electronically invert the feedback polarity:
– If you are using a single encoder feedback module (20-750-ENC-1), navigate to parameter nn:1
[Encoder Cfg], where nn is the port where the motor encoder feedback module is installed. Press the
EDIT soft key. Edit the value using the HIM navigation keys to select bit 5 'Direction'. Enter a value of
1 to invert the polarity. Press the ENTER soft key.
– If you are using a dual encoder feedback module (20-750-DENC-1), navigate to parameter
nn:1 [Enc0 Cfg] or parameter nn:11 [Enc1 Cfg], where nn is the port where the motor encoder
feedback module is installed. Press the EDIT soft key. Edit the value using the HIM navigation keys to
select bit 5 'Direction'. Enter a value of 1 to invert the polarity. Press the ENTER soft key.
IMPORTANT If you reset parameters to defaults, this parameter is reset to (0) and the motor feedback may be negative, which may
cause loss of speed regulation and potential motor overspeed.
Rockwell Automation Publication 750-QS100B-EN-P - August 2020 37
Page 38

Step 7: Tune the Motor Side Inverter Control
Select the Source of Motor Control Parameter Values
In this procedure, you select the source of motor control parameter settings. These parameters include stator resistance,
leakage inductance, flux current reference, encoderless electrical angle compensation, stator resistance compensation
factor, and slip speed at full load.
1. Navigate to parameter 10:510 [MtrParam C/U Sel].
2. Press the EDIT soft key.
3. Set the value for this parameter to 2 ‘LoadCalcData’.
TIP The options for this parameter include the following:
0 ‘Calculated’ – The parameters are set to values that have been calculated from previously entered information. These
values are not based on the results of a Motor ID test.
1 ‘User Entered’ – The parameters are set to values entered by the user. User entered values can be values that were
copied from the Calculated values, if LoadCalcData was selected and no Motor ID test was run. User entered values can
also be the measured test results from a Motor ID test, if LoadCalcData was selected and then a Motor ID test was run.
2 ‘LoadCalcData’ – When this option gets set, it copies the default Calculated values into the parameter as User Entered
values, providing default values to start with before any test has been run. It then sets the value of 10:510 [MtrParam
C/U Sel] to 1 ‘User Entered’, allowing you to adjust the Calculated values. Additionally, when LoadCalcData has been set,
whenever a Motor ID test is run, the motor control parameter values are updated using the results of the test. After the
values are updated using the test results, the value of [MtrParam C/U Sel] is set to 1 ‘User Entered’. This allows User
Entered changes to the test result values.
4. Press the ENTER soft key.
38 Rockwell Automation Publication 750-QS100B-EN-P - August 2020
Page 39

Step 7: Tune the Motor Side Inverter Control
Enter Motor Inertia
This procedure is only needed for applications that use Flux Vector motor control mode.
1. Determine what value to use for the Motor Inertia parameter. The Motor Inertia parameter is set in units of
2
kg•m
. There are four ways to determine the Motor Inertia value. These four ways are listed from most effective to
least effective:
• If a motor inertia value is provided on the motor nameplate or data sheet, ensure that it is in units of kg•m
2
use that value. If the motor inertia value is given in lb•ft
2
kg•m
.
•Perform the Motor Inertia Test on page 40
. This test dynamically measure motor inertia. The test can only be
performed if the load is uncoupled from the motor.
• Use the following equation to roughly approximate the Motor Inertia value based on the motor nameplate
horsepower (HP):
Jm = HP/250 x (HP/500 + 1)
If the motor nameplate provides a value in kW, multiply the kW value by 1.341 to convert to HP for this
equation.
• Let the Motor Inertia parameter stay set to the default value, which is based on a motor power rating that is
equal to the drive power rating.
or WK2, divide the value by 23.73 to convert to
2
and
2. If you used the nameplate/data sheet, or the equation method to find the motor inertia, continue on to step 3
you used the Motor Inertia Test, or chose to leave the Motor Inertia parameter at the default value, then the Motor
Inertia parameter is already set, and you have finished the Enter Motor Inertia procedure.
3. Navigate to parameter 10:900 [Motor Inertia]. Press the EDIT soft key.
4. Edit the value to the motor inertia you found in step 1
, in units of kg•m2. Press the ENTER soft key.
. If
Rockwell Automation Publication 750-QS100B-EN-P - August 2020 39
Page 40

Step 7: Tune the Motor Side Inverter Control
Motor Inertia Test
Use this test to measure the motor inertia only when the following are all true:
• The application uses Flux Vector motor control mode.
• The motor inertia value cannot be obtained from the manufacturer.
• It is possible to operate the motor while it is uncoupled from the load.
See the Auto Tuning section in the PowerFlex 755T Flux Vector Tuning application technique, publication 750-AT006
for more information about the autotuning features of the drive.
1. Navigate to parameter 10:910 [Autotune]. Press the EDIT soft key.
2. Edit the value to 4 'InertiaMotor'. Press the ENTER soft key.
3. Ensure that the motor is uncoupled from the load. Ensure that the area around the motor is safely secured and the
motor shaft can freely rotate up to a speed of 75% of the motor nameplate base speed.
IMPORTANT The motor rotates during this test.
4. Press the Start key .
You can stop motor rotation at any time during this test by pressing the Stop key .
5. Wait for the test to complete. When complete, the drive stops and the HIM status display shows 'Stopped'.
Parameter 10:900 [Motor Inertia] is updated and parameter 10:901 [Load Ratio] is set to 0.
TIP You can leave the load uncoupled from the motor because it will need to be uncoupled to perform the Rotate Motor ID Test.
,
Perform the Motor ID Test
A Motor ID test is recommended when using Sensorless Vector, or Economize motor control modes. A Motor ID test is
required when using Flux Vector motor control mode. There are two methods of conducting a Motor ID Test. It is only
necessary to conduct the test using one of these methods:
• Rotate Motor ID Test on page 41
uncoupled from the load and can safely be rotated up to Base speed. Applications that use a permanent magnet
motor require the Rotate Motor ID test.
• Static Motor ID Test on page 42
Static Motor ID Test cannot be used for applications that use a permanent magnet motor. This test can only be
used for applications that use an induction motor.
See the Auto Tuning section in the PowerFlex 755T Flux Vector Tuning application technique,
publication 750-AT006
40 Rockwell Automation Publication 750-QS100B-EN-P - August 2020
, for more information about the autotuning features of the drive.
: This is the preferred method. This method requires that the motor be
: If the motor is coupled to the load or cannot be rotated, use this method. The
Page 41

Step 7: Tune the Motor Side Inverter Control
Rotate Motor ID Test
1. Navigate to parameter 10:910 [Autotune].
2. Press the EDIT soft key.
3. Set the value of the parameter to 3 ‘Rotate MtrID’.
4. Press the ENTER soft key.
Rotate Tune measures the following motor parameters;
• Stator Resistance. This is one of the following depending on which control mode is used:
– Induction Motor Stator Resistance, parameter 10:512 [u IM Stator Res].
– Permanent Magnet Stator Resistance, parameter 10:620 [u PM Stator Res].
– Synchronous Reluctance Stator Resistance, parameter 10:731 [u SynR Stator Res].
• Flux Current, parameter 10:518 [u Flux Cur Ref ].
• Levels of inductances. Only in Flux Vector motor control mode. For permanent magnet motor only.
– PM D Axis Inductance at 0 Cur, parameter 10:627 [u PM Ld at 0].
– PM D Axis Inductance at 100 Cur, parameter 10:629 [u PM Ld at 100].
– PM Q Axis Inductance at 25 Cur, parameter 10:637 [u PM Lq at 25].
– PM Q Axis Inductance at 50 Cur, parameter 10:639 [u PM Lq at 50].
– PM Q Axis Inductance at 75 Cur, parameter 10:641 [u PM Lq at 75].
– PM Q Axis Inductance at 100 Cur, parameter 10:643 [u PM Lq at 100].
– PM Q Axis Inductance at 125 Cur, parameter 10:645 [u PM Lq at 125].
– PM Q Axis Inductance at 150 Cur, parameter 10:647 [u PM Lq at 150].
– PM Q Axis Inductance at 175 Cur, parameter 10:649 [u PM Lq at 175].
– PM Q Axis Inductance at 200 Cur, parameter 10:651 [u PM Lq at 200].
• Stator Leakage Inductance, parameter 10:515 [u IM Leakage L]. Only in Flux Vector motor control mode. For
induction motor only.
• Slip RPM, parameter 10:490 [u Slip RPM atFLA]. Only in Flux Vector motor control mode when motor
feedback is used. For induction motor only.
• Stator Resistance Compensation, parameter 10:524 [u IM StatResComp]. Only in Flux Vector motor control
mode when motor feedback is not used. For induction motor only.
• EncoderLess Angle Compensation, parameter 10:521 [u EncLs AngCmp]. Only in Flux Vector motor control
mode when motor feedback is not used. For induction motor only.
Rockwell Automation Publication 750-QS100B-EN-P - August 2020 41
Page 42

Step 7: Tune the Motor Side Inverter Control
5. Ensure that the motor is uncoupled from the load. Ensure that the area around the motor is safely secured and the
motor shaft can freely rotate up to a speed of 75% of the motor nameplate base speed.
IMPORTANT The motor rotates during this test.
6. To begin the test, press the Start key. The maximum motor speed during the test is 75% of base speed.
Autotuning begins, indicated when the top line of the HIM shows ‘Autotuning’.
If you want to stop the motor rotation anytime during the Autotuning test, you can press the Stop key. The
HIM then shows a code 10032 ‘AutoTune Aborted’ fault and the motor coasts to a stop.
7. Wait for the test to complete. When complete, the drive stops and the HIM shows 'Stopped'.
8. Once the motor has stopped and is in a safe state, couple the load to the motor.
Static Motor ID Test
1. Navigate to parameter 10:910 [Autotune].
2. Press the EDIT soft key.
3. Set the value for this parameter to 2 ‘Static MtrID’.
4. Press the ENTER soft key.
Static Tune measures the following motor parameters:
• Stator Resistance, parameter 10:512 [u IM Stator Res]
• Stator Leakage Inductance, parameter 10:515 [u IM Leakage L]. Only in Flux Vector motor control mode.
• Stator Resistance Compensation, parameter 10:524 [u IM StatResComp]. Only in Flux Vector motor control
mode when motor feedback is not used.
5. To begin the test, press the Start key.
Autotuning begins, indicated when the top line of the HIM shows ‘Autotuning’.
If you want to stop the motor rotation anytime during the Autotuning test, you can press the Stop key. The
HIM then shows a code 10032 ‘AutoTune Aborted’ fault and the motor coasts to a stop.
6. Wait for the test to complete. When complete, the drive stops and the HIM shows 'Stopped'.
42 Rockwell Automation Publication 750-QS100B-EN-P - August 2020
Page 43

Step 7: Tune the Motor Side Inverter Control
Autotune Bandwidth Calculations
Perform this procedure only if your application uses Flux Vector motor control. For more information on Autotune
Bandwidth Calculations, refer to the PowerFlex 755T Flux Vector Tuning Application Technique,
publication 750-AT006
1. Navigate to parameter 10:902 [Load Coupling].
2. Ensure that the value of the parameter is 1 ‘Compliant’. This indicates that the load is a non-rigid load where
position misalignment, backlash, and flexing of couplings, gearboxes, belts, and shafts can occur which creates an
indirect connection of the load to the motor shaft. This setting is common for most machines. It is the
recommended default setting when parameter 10:901 [Load Ratio] is set to 0.
3. Navigate to parameter 10:907 [System Damping].
4. Ensure that the value of the parameter is 1. This is the recommended default value.
5. Navigate to parameter 10:2020 [LdObs Mode]. This parameter configures the load observer feature. Press the
EDIT soft key.
6. Set the value of the parameter to one of the following options based on which type of Flux Vector control mode
your application uses (Torque, Velocity, or Position):
• 0 ‘Disabled’ - For applications using Torque mode
• 1 ‘LdObs Only’ - For applications using Velocity mode
• 2 ‘LdObs VelEst’ - For applications using Position mode
. This procedure does not initiate motion.
7. Press the ENTER soft key.
8. Navigate to parameter 10:910 [Autotune]. Press the EDIT soft key.
9. Set the value of the parameter to 6 ‘BW Calc’. Press the ENTER soft key.
The following parameters are calculated based on motor inertia, load ratio, load coupling, system damping, load
observer mode, and motor parameters that were entered in previous steps:
• 10:906 [System BW]
• 10:1010 [Alt Fb GnScale]
• 10:1392 [Max Speed Fwd]
• 10:1393 [Max Speed Rev]
• 10:1898 [Vel Limit Pos]
• 10:1899 [Vel Limit Neg]
• 10:1965 [Accel Limit Pos]
• 10:1966 [Accel Limit Neg]
• 10:2083 [Torque Limit Pos]
• 10:2084 [Torque Limit Neg]
Rockwell Automation Publication 750-QS100B-EN-P - August 2020 43
Page 44

Step 8: Set Up Velocity Reference
Step 8: Set Up Velocity Reference
Select the configuration according to the wiring you recorded in Table 2 on pa ge 10.
Default Reference Source
The default velocity reference source is the drive-mounted HIM, port 1 (the HIM cradle - see Figure 1 on page 9). To
verify the reference source, navigate to parameter 10:1800 [VRef A Sel]. Verify that the source is parameter 0:214 'Port 1
Reference'.
Door Mounted or Remote Mounted HIM
To use a door-mounted or remote-mounted HIM reference source:
IMPORTANT The drive must be stopped.
1. Navigate to parameter 10:1800 [VRef A Sel]. Press the EDIT soft key.
2. Use the HIM navigation keys to choose port 0. Press the ENTER soft key.
3. Do one of the following:
• For a HIM installed in port 2, select parameter 215 ‘Port 2 Reference’.
• For a HIM installed in port 3, select parameter 216 ‘Port 3 Reference’.
4. Press the ENTER soft key.
Connections on 11-Series and 22-Series I/O Modules
The 11-Series I/O Module is Catalog Number 20-750-11xxx-xxxx. The 22-Series I/O Module is Catalog Number 20750-22xxx-xxxx.
Examples of wiring option module analog I/O can be found in the PowerFlex 750-Series I/O, Feedback, and Power
Option Modules Installation Instructions, publication 750-IN111
.
44 Rockwell Automation Publication 750-QS100B-EN-P - August 2020
Page 45

Step 8: Set Up Velocity Reference
Use this table to determine the parameters that are associated with I/O option module port location, and analog input
that is used for the velocity reference. The port where the I/O module is installed is designated by nn.
Terminal Name Option Module Related Parameters
Ai0+, Ai0- Analog Input 0 11-Series
22-Series
Ai1+, Ai1- Analog Input 1 22-Series nn:45 [Anlg In Type], Bit 1
nn:45 [Anlg In Type], Bit 0
nn:50 [Anlg In0 Value]
nn:51 [Anlg In0 Hi]
nn:52 [Anlg In0 Lo]
nn:53 [Anlg In0 LssActn]
nn:60 [Anlg In1 Value]
nn:61 [Anlg In1 Hi]
nn:62 [Anlg In1 Lo]
nn:63 [Anlg In1 LssActn]
IMPORTANT The drive must be stopped.
1. Navigate to parameter 10:1800 [VRef A Sel]. Press the EDIT soft key.
2. Edit the value using the HIM navigation keys to select the I/O module port and velocity-reference-analog-input
parameter corresponding to the analog input terminals you recorded in Table 2 on page 10
.
For example, when using a 22-Series (20-750-22xxx-xxxx) in port 4 with the velocity reference wired to terminals
<Ai1+> and <Ai1->. Navigate to parameter 10:1800 [VRef A Sel]. Press the EDIT soft key. Edit the value using
the HIM navigation keys to select the I/O module in port 4. Press the ENTER soft key. Use the HIM navigation
keys to select parameter 4:60 [Anlg In1 Value]. Press the ENTER soft key.
3. Navigate to the port and parameters containing the I/O option card. Edit each of the parameter values so that they
match the application requirements. See the PowerFlex Drives with TotalFORCE Control Programming Manual,
publication 750-PM100
, for more information about setting these parameters.
In the preceding example, you would edit values for these parameters: 4:61 [Anlg In1 Hi], 4:62 [Anlg In1 Lo], and
4:63 [Anlg In1 LssActn].
Embedded EtherNet/IP Interface
IMPORTANT The drive must be Stopped.
1. Navigate to parameter 10:1800 [VRef A Sel]. Press the EDIT soft key.
2. Edit the value using the HIM navigation keys to select port 0. Press the ENTER soft key.
3. Use the HIM navigation keys to select parameter 211 ‘Emb Enet Ref’. Press the ENTER soft key.
See Configure Embedded EtherNet/IP Communication Adapter on page 26
and Set the Embedded Ethernet
Adapter IP Address Switches on page 27 for more information about setting the Embedded EtherNet IP address.
Rockwell Automation Publication 750-QS100B-EN-P - August 2020 45
Page 46

Step 9: Set Up Start/Stop
Step 9: Set Up Start/Stop
Human Interface Module
By default, the drive-mounted HIM (port1) or remote mounted HIM (ports 2/3) provide three-wire control. This
allows you to start the drive with the Start key , and stop the drive with the Stop key .
If you want to use the HIM for Start/Stop control, verify that parameter 0:41 [Logic Mask] bits 01…03 are enabled (set
to '1') to allow operation with the HIM port you are using. See Appendix A > Disable the HIM Start Function on
page 59 for more information.
IMPORTANT If you are not using the HIM for Start/Stop control, disable the HIM Start key to help prevent inadvertent drive operation if the
HIM Start key is pressed. See Appendix A > Disable the HIM Start Function
for more information.
Control on 11-Series and 22-Series I/O Modules
The 11-Series I/O Module is Catalog Number 20-750-11xxx-xxxx.
The 22-Series I/O Module is Catalog Number 20-750-22xxx-xxxx.
IMPORTANT Two-Wire and Three-Wire control discrete wired inputs are not compatible. Select one mode or the other. Configuring a Start
and a Run on the same drive causes a Digital Input Configuration fault.
Three-Wire Control
Examples of wiring option module digital I/O can be found in the PowerFlex 750-Series I/O, Feedback, and Power
Option Modules Installation Instructions, publication 750-IN111
IMPORTANT The drive must be Stopped.
1. Navigate to parameter 0:108 [DI M Stop]. Press the EDIT soft key.
.
46 Rockwell Automation Publication 750-QS100B-EN-P - August 2020
Page 47

Step 9: Set Up Start/ Stop
2. Edit the value using the HIM navigation keys to assign the I/O module port, and digital input status bit,
parameter nn:1 [Dig In Sts], corresponding to the Stop digital input terminal you recorded in Ta ble 2 on page 10
For example, the Stop push button is wired to terminal DI 0 of a 22-Series (20-750-22xxx-xxxx) I/O module in
port 4. Navigate to parameter 0:108 [DI M Stop]. Press the EDIT soft key. Edit the value using the HIM
navigation keys to select the I/O module in port 4. Press the ENTER soft key. Use the HIM navigation keys to
select parameter 4:1 [Dig In Sts]. Press the ENTER soft key. Use the HIM navigation keys to select bit 0. Press the
ENTER soft key.
3. Navigate to parameter 0:117 [DI M Start]. Press the EDIT soft key.
4. Edit the value using the HIM navigation keys to assign the I/O module port and digital input status bit, and the
parameter nn:1 [Dig In Sts], corresponding to the motor side Start digital input terminal you recorded in Ta b l e 2
For example, the Start push button is wired to terminal DI 1 of a 22-Series (20-750-22xxx-xxxx) I/O module in
port 4. Navigate to parameter 0:117 [DI M Start]. Press the EDIT soft key. Edit the value using the HIM
navigation keys to select the I/O module in port 4. Press the ENTER soft key. Use the HIM navigation keys to
select parameter 4:1 [Dig In Sts]. Press the ENTER soft key. Use the HIM navigation keys to select bit 1. Press the
ENTER soft key.
Two-Wire Control
.
.
Examples of wiring option module digital I/O can be found in the PowerFlex 750-Series I/O, Feedback, and Power
Option Modules Installation Instructions, publication 750-IN111
IMPORTANT The drive must be stopped.
1. Navigate to parameter 0:120 [DI M Run]. Press the EDIT soft key.
2. Edit the value using the HIM navigation keys to assign the I/O module port and digital input status bit, and
parameter 0:1 [Dig In Sts], corresponding to the motor side Run digital input terminal you recorded in Ta b l e 2
For example, the Run input is wired to terminal DI 2 of a 22-Seriex (20-750-22xxx-xxxx) I/O module in port 4.
Navigate to parameter 0:120 [DI M Run]. Press the EDIT soft key. Edit the value using the HIM navigation keys
to select the I/O module in port 4. Press the ENTER soft key. Use the HIM navigation keys to select parameter
4:1 [Dig In Sts]. Press the ENTER soft key. Use the HIM navigation keys to select bit 2. Press the ENTER soft
key.
.
Embedded EtherNet/IP Interface
The logic command word from the controller starts and stops the drive without any special parameter settings.
.
Rockwell Automation Publication 750-QS100B-EN-P - August 2020 47
Page 48

Step 10: Set Acceleration and Deceleration Times
Step 10: Set Acceleration and Deceleration Times
In this step, you set acceleration and deceleration times for the motor to help protect the drive and motor from overload.
Acceleration and Deceleration Times
The default acceleration time is 10 seconds (from 0 to Motor NP RPM). The default deceleration time is 10 seconds
(from Motor NP RPM to 0).
Some applications with high inertia loads, such as fans and centrifuges, can cause drive overload and other faults
especially during acceleration and deceleration. See Appendix A > High Inertia Loads on page 57
about optimizing drive parameters.
Use the following procedure to modify acceleration and deceleration times if needed.
for more information
1. Navigate to parameter 10:1915 [VRef Accel Time1].
2. Press the EDIT soft key.
3. Edit the value to the desired acceleration time in seconds and press the ENTER soft key.
4. Navigate to parameter 10:1917 [VRef Decel Time1].
5. Press the EDIT soft key.
6. Edit the value to the desired deceleration time in seconds and press the ENTER soft key.
Step 11: Configure Outputs
In this step, you configure analog and digital outputs.
48 Rockwell Automation Publication 750-QS100B-EN-P - August 2020
Page 49

Step 11: Configure Outputs
Analog Outputs
Select the configuration according to the analog output wiring you recorded in Table 2 on page 10.
Examples of wiring option module analog I/O can be found in the PowerFlex 750-Series I/O, Feedback, and Power
Option Modules Installation Instructions, publication 750-IN111
Use this table to determine the parameters associated with I/O option module analog output parameters, where nn is
port where the I/O module is installed.
Terminal Name Option Module Related Parameters
Ao0+, Ao0- Analog Out 0 11- Series
22-Series
Ao1+, Ao1- Analog Out 1 22- Series nn:70 [Anlg Out Type], bit 1
.
nn:70 [Anlg Out Type], bit 0
nn:71 [Anlg Out Abs], bit 0
nn:75 [Anlg Out0 Sel]
nn:76 [Anlg Out0 Stpt]
nn:77 [Anlg Out0 Data]
nn:78 [Anlg Out0 DataHi]
nn:79 [Anlg Out0 DataLo]
nn:80 [Anlg Out0 Hi]
nn:81 [Anlg Out0 Lo]
nn:82 [Anlg Out0 Val]
nn:71 [Anlg Out Abs], bit 1
nn:85 [Anlg Out1 Sel]
nn:86 [Anlg Out1 Stpt]
nn:87 [Anlg Out1 Data]
nn:88 [Anlg Out1 DataHi]
nn:89 [Anlg Out1 DataLo]
nn:90 [Anlg Out1 Hi]
nn:91 [Anlg Out1 Lo]
nn:92 [Anlg Out1 Val]
1. Navigate to port nn, parameter 75 [Anlg Out0 Sel] for I/O terminal <Ao0>, or parameter 85 [Anlg Out1 Sel] for
I/O terminal <Ao1>. Press the EDIT soft key.
2. Edit the value using the HIM navigation keys to select the port and parameter corresponding with the analog
output functions you recorded in Ta b l e 2
.
For example, when using a 22-Series (20-750-22xxx-xxxx) in port 4 with a motor current meter wired to analog
output terminals <Ao0+> and <Ao0->. Navigate to port 4, parameter 75 [Anlg Out0 Sel]. Press the EDIT soft
key. Edit the value using the HIM navigation keys to select port 10. Press the ENTER soft key. Use the HIM
navigation keys to select the motor side inverter 'Output Current', parameter 10:3 [Output Current]. Press the
ENTER soft key.
3. Navigate to the port and parameters for the I/O option card. Edit each of the parameter values to match the
application requirements. See the PowerFlex Drives with TotalFORCE Control Programming Manual,
publication 750-PM100
, for more information about setting these parameters.
In the previous example, you would navigate to port 4 and edit values for these parameters: 4:70 [Angl Out Type]
bit 0, 4:71 [Anlg Out Abs] bit 0, 4:78 [Anlg Out0 DataHi], 4:79 [Anlg Out0 DataLo], 4:80 [Anlg Out0 Hi], and
4:81 [Anlg Out0 Lo].
Rockwell Automation Publication 750-QS100B-EN-P - August 2020 49
Page 50

Step 11: Configure Outputs
Digital Outputs
Select the configuration according to the digital output wiring you recorded in Table 2 on p age 10.
Examples of wiring option module analog I/O can be found in the PowerFlex 750-Series I/O, Feedback, and Power
Option Modules Installation Instructions, publication 750-IN111
Use this table to determine the parameters associated with I/O option module digital output parameters, where nn is
port where the I/O module is installed.
Terminal Name Option Module Related Parameters
R0NO, R0NC, R0C Relay Out 0 11-Series
R1NO, R1NC, R0C Relay Out 1 22-Series nn:20 [Ro1 Sel]
T0, TC Transistor Out 0 11-Series
T1, TC Transistor Out 1 11-Series
.
nn:10 [Ro0 Sel]
22-Series
nn:20 [To0 Sel]
22-Series
nn:30 [To1 Sel]
22-Series
1. Navigate to port nn.
2. Navigate to the parameter for the I/O terminals you want to edit:
• For I/O terminals R0NO/R0C/R0NC, navigate to parameter 10 [RO0 Sel].
• For I/O terminals R1NO/R1C/R1NC (T0/TC), navigate to parameter 20 [RO1 Sel] ([TO0 Sel]).
• For I/O terminals T1/TC, navigate to parameter 30 [TO1 Sel].
3. Press the EDIT soft key.
4. Edit the value using the HIM navigation keys to select the port and parameter corresponding to the digital output
function you recorded in Ta b l e 2
.
The following is an example illustrating how to edit the value. Suppose the following situation:
• You are using a 22-Series (20-750-2262C-2R) in port 4.
• It requires a connection that is wired to digital output terminals <R0NO> and <R0C>.
• It is required to turn on when the motor side inverter is active.
In this situation, you would do the following : Navigate to parameter 4:20 [RO0 Sel]. Press the EDIT soft key. Edit
the value using the HIM navigation keys to select port 10. Press the ENTER soft key. Use the HIM navigation
keys to select the motor side status, parameter 10:354 [Motor Side Sts 1]. Use the HIM navigation keys to select
bit 1 'Active'. Press the ENTER soft key.
5. Navigate to the port and parameters for the I/O option card. Edit each of the parameter values to match the
application requirements. See the PowerFlex Drives with TotalFORCE Control Programming Manual,
publication 750-PM100
, for more information about setting these parameters.
In the preceding example, you would navigate to port 4 and edit values for these parameters: 4:11 [RO0 Level Sel],
4:12 [RO0 Level], 4:14 [RO0 On Time], 4:15 [RO0 Off Time].
50 Rockwell Automation Publication 750-QS100B-EN-P - August 2020
Page 51

Step 12: Verify Drive Operation
Step 12: Verify Drive Operation
At this point, you have completed the steps that are required to start up your drive for the first time. Now, verify and
record that each of your drive/motor combinations is operating correctly.
Use the information displayed on the HIM, the drive status indicators to the right of the HIM, and the system operation
to assist with verifying drive operation. See Appendix A > Status Indicators on page 54
interpreting the status indicators.
1. Is each drive/motor combination responding correctly to each of the signal sources?
Signal Command Drive/Motor 1 Drive/Motor 2 Drive/Motor 3 Drive/Motor 4 Drive/Motor 5
Start/Stop or Run
Direction
(if applicable)
❑❑❑❑❑
❑❑❑❑❑
for more information about
2. Is each drive/motor combination responding correctly to the speed reference source? (Check only the boxes that
apply.)
Velocity Reference Drive/Motor 1 Drive/Motor 2 Drive/Motor 3 Drive/Motor 4 Drive/Motor 5
❑
Yes
❑
Yes
Yes
Yes
❑
❑
❑
No
No
No
No
❑
❑
❑
❑
Yes
Yes
Yes
Yes
❑
❑
❑
❑
No
No
No
No
❑
❑
❑
❑
Yes
Yes
Yes
Yes
❑
❑
❑
❑
No
No
No
No
❑
❑
❑
❑
Yes
Yes
Yes
Yes
❑
❑
❑
❑
No
No
No
No
❑
❑
❑
❑
Yes
Yes
Yes
Yes
❑
❑
❑
❑
No
No
No
No
Communications over Other Protocol
I/O Option Module Analog Input
Communications over Embedded EtherNet/IP Adapter
HIM Source
❑
❑
❑
Configuration Troubleshooting
If any of your drive/motor combinations are not functioning properly, review Step 1: Gather the Required Information
through Step 11: Configure Outputs
parameters were set correctly.
If your EtherNet/IP communications are not functioning properly, verify that the controller/PLC is communicating the
expected commands and/or reference. For more information, see the PowerFlex Drives with TotalFORCE Control
Built-in EtherNet/IP Adapter User Manual, publication 750COM-UM009
page 52.
to be sure that the correct information was gathered or calculated and that
, or see Contact Technical Support on
To interpret the Status Indicators, refer to Appendix A > Status Indicators on page 54
and the Troubleshooting chapter
within the PowerFlex Drives with TotalFORCE Control Programming Manual, publication 750-PM100
If performance problems persist, see the publications that are listed in Additional Resources on page 61
Rockwell Automation Publication 750-QS100B-EN-P - August 2020 51
.
.
Page 52

After Basic Setup
Contact Technical Support
If you feel you need additional technical support, have the information that is gathered in Table 1 on pag e 8 ,
Table 2 on page 10
, and Table 3 on page 1 5, before contacting a support representative.
After Basic Setup
Step 1: Gather the Required Information through Step 12: Verify Drive Operation cover the basic steps to start up and
operate your drive. This section briefly describes steps that you can take beyond basic setup.
Configure Predictive Maintenance
When configured, the Predictive Maintenance feature evaluates drive operation and sensor inputs to calculate the
remaining life of key components. We highly recommend using Predictive Maintenance. We recommend configuring
Predictive Maintenance soon after the initial startup of the drive and monitoring Predictive Maintenance information on
a regular schedule. For information on configuring and using Predictive Maintenance, see the Predictive Maintenance
section in the PowerFlex 750-Series Products with TotalFORCE Control Reference Manual, publication 750-RM100
.
Advanced Configuration
If you want to perform configuration of your drive beyond the basic setup, refer to the following documents:
• PowerFlex Drives with TotalFORCE Control Programming Manual, publication 750-PM100
• PowerFlex 755T Flux Vector Tuning Application Technique, publication 750-AT006 (only for applications that
use Flux Vector motor control mode)
52 Rockwell Automation Publication 750-QS100B-EN-P - August 2020
Page 53

Appendix A
Reference Information
This appendix provides reference information that supplements the start-up and configuration procedure.
Reset Device
There are two Reset Device procedures. You can use either method to reset the device:
• Cycle Power to the Drive and Control Pod
• Use the HIM Reset Device Function
Cycle Power to the Drive and Control Pod
1. De-energize the external 24V DC power source that is connected to the drive 24V Auxiliary Power terminals, if
used.
2. De-energize the AC power supply to the drive AC input. To ensure that the drive is adequately de-energized, wait
3 minutes or wait until all lights are off in the drive cabinet.
3. Energize the AC power supply to the drive AC input.
4. Energize the 24V Auxiliary Power supply source, if used.
IMPORTANT If the 24V Auxiliary Power supply source is energized, cycling the AC power does not reset the control pod port devices.
Use the HIM Reset Device Function
1. Ensure that the drive is not communicating to a controller. You cannot use the HIM reset device function while
the drive is communicating to a controller.
2. Access the HIM Status screen. The AC power and 24V Auxiliary Power sources can be energized when using the
HIM Reset Device function.
3. Use the HIM navigation keys to scroll to the port of the device you want to reset. Typically this is port 0 Host
drive.
4. Press the key and use the HIM navigation keys to scroll to the DIAGNOSTIC folder.
5. Use the HIM navigation keys to select 'Reset Device'.
6. Press the key. When the confirmation dialog box opens, press the ENTER soft key to reset the device. The
device restarts. To cancel Reset Device, press the ESC soft key.
Rockwell Automation Publication 750-QS100B-EN-P - August 2020 53
Page 54

Appendix A Reference Information
Status Indicators
The status indicators on the drive-mounted HIM cradle indicate the status of the drive.
Name Color State Description
STS
(Status)
ENET Unlit Off There is no link on port1 or port 2. Embedded EtherNet/IP™ is not properly
LNK1
(Link 1)
LNK2
(Link 2)
Green Flashing The drive is not running and no faults or alarms are present. The drive is ready to run.
Steady The drive is running and no faults or alarms are present.
Yellow Flashing The drive is not running. A start inhibit condition is present in the drive. The drive
Steady The drive is not running and a type 1 (user configurable) alarm exists. The drive
Red Flashing A major fault has occurred. If the drive is running, it stops. The drive cannot be
Steady A non-resettable fault has occurred.
Red /
Flashing
Yel lo w
Alternately
Yel lo w/
Flashing
Green
Alternately
Green/
Flashing
Red
Alternately
Unlit Off The main control board is not powered.
Red Flashing At least one of the following has occurred:
Steady At least one of the following has occurred:
Green Flashing There is normal operation with an I/O connection and network peer input, but
Steady I/O connection, network peer input, or explicit messaging control is active (the drive
Unlit Off There is no link on this port because the adapter is not powered or is not
Green Flashing Adapter is properly connected (100 Mbps or 1 Gbps), and transmitting data packets
Steady Adapter is properly connected (100 Mbps or 1 Gbps), but is not transmitting on the
Amber Flashing Adapter is properly connected (10 Mbps), and transmitting data packets on the
Steady Adapter is properly connected (10 Mbps but is not transmitting on the network.
cannot be started until the start inhibit condition is cleared.
See parameter 0:603 [Start Inhibits].
cannot be started until the alarm condition is cleared.
See parameters 10:465 [Alarm Status A] and 10:466 [Alarm Status B].
started until the fault condition is cleared.
See parameter 0:610 [Last Fault Code].
A minor fault has occurred. If the drive is running, it continues to run. The drive
cannot be restarted until the fault condition is cleared.
The drive is running and a type 1 alarm exists. The drive can continue to run. The
drive can be restarted without clearing the alarm condition.
See parameters 10:465 [Alarm Status A] and 10:466 [Alarm Status B].
The drive is updating the flash memory for firmware on the main control board, an
option card, or a peripheral device.
connected to the network or needs an IP address.
• An I/O connection timed out.
• Network peer input timed out.
• Explicit messaging control timed out.
• Network address rotary switches have changed.
• The IP address is invalid. If this occurs, communication defaults to DHCP.
• There is a duplicate IP address.
• The network address rotary switches are set to 888.
• DHCP lease expired.
explicit messaging control is inactive (there is a valid IP address, the network cable is
plugged in, and a physical layer connection is established to a remote device, but
the drive is not being controlled via Ethernet).
is being controlled via Ethernet).
transmitting on the network.
on the network.
network.
network.
54 Rockwell Automation Publication 750-QS100B-EN-P - August 2020
Page 55

Reference Information Appendix A
00
Stopped
0.00 Hz
Host Drive
240V 4.2 A
20G...D014
ESC
REF
PAR#
TEXT
AUTO
ESC
ESC
INFO
INFO
Stopped
0.00 Hz
Stopped
0.00 Hz
Port 00 Set Defaults
Host and Ports (Preferred)
This Port Only
Port xx Set Defaults
This Port Only
INFOINFO
Setting Factory Defaults
1. Ensure that the drive is not communicating to a controller. If the drive is communicating to a controller, you
cannot set to factory defaults.
2. Access the Status screen.
3. Use the left or right key to scroll to the port of the device whose parameters you want to set to
factory defaults. For example, port 0 for the Host drive, or the respective port number for one of the connected
peripherals on the drive.
4. To display its last-viewed folder, press the key.
5. To scroll to the 'MEMORY' folder, use the left or right keys.
6. To select 'Set Defaults', use the up or down keys.
7. To select the appropriate action, use the up or down key.
8. If you chose the Host device (port 0), these choices appear:
• Host and Ports (Preferred): Selects the Host device (port 0) and all ports for a factory default action.
• This Port Only: Selects only this port for a factory default action.
Press the INFO soft key to display a description of the selected menu function.
9. To display the Set Defaults popup box, press the key.
Rockwell Automation Publication 750-QS100B-EN-P - August 2020 55
Page 56

Appendix A Reference Information
ESC ENTER
WARNING
Sets most parameters in the host
device and all ports to factory
defaults.
Continue?
WARNING
Use MOST to reset typical ?
settings on this port
(preferred). Use ALL to
reset all settings.
?
ESC
ALL
MOST
10. If you selected either port 0, Host drive and 'Host and Ports (Preferred)', or 'This Port Only' for any other port or
peripheral device, select the appropriate action by using a soft key:
• The ENTER soft key sets most parameters for the selected port devices to factory defaults.
To see the settings that are not restored to factory defaults if you chose the Host device (port 0), see the Setting
Factory Defaults section of the PowerFlex Drives with TotalFORCE Control Programming Manual,
publication 750-PM100
.
If you chose any other port device, then all parameters in that port/peripheral are set to factory defaults.
• The ESC soft key cancels the operation; no parameters are set to factory defaults.
11. If you selected port 0 Host drive, and 'This Port Only', select the appropriate action by using a soft key. If you
selected another port/peripheral device, then the only selection is as shown in the previous step.
• MOST sets most parameters for port 0, Host drive to factory defaults.
To see the Host device settings that are not restored to factory defaults if you choose MOST, see the Setting
Factory Defaults section of the PowerFlex Drives with TotalFORCE Control Programming Manual, publication
750-PM100
.
• ALL sets all parameters for port 0, Host drive to factory defaults.
• ESC cancels the operation; no parameters are set to factory defaults.
IMPORTANT If 'Host and Ports' are set to factory default, port 0 Fault Code 18 'System Defaulted' appears. If 'This Port Only' is set to factory
default, port 0 Fault Code 27 'Module Defaulted' appears. This is normal and expected. Press the HIM Stop key to reset the fault.
56 Rockwell Automation Publication 750-QS100B-EN-P - August 2020
Page 57

Reference Information Appendix A
Line Side Converter Settings
If necessary, configure the following line side converter settings.
LCL Filter Capacitor Resonance Alarms
If you are experiencing LCL filter capacitor alarms, code 14117 'CapHighResonance' and/or, code 14118
'CapOverResonace', it may be necessary to tune the line side converter regulator and/or replace the LCL filter capacitors.
Review practices for sizing and locating transformers, found in the following publications:
• PowerFlex 750-Series Products with TotalFORCE Control Installation Instructions, publication 750-IN100
• Drives in Common Bus Configurations with PowerFlex 755TM Bus Supplies Application Techniques,
publication DRIVES-AT005
If this event occurs while the line side converter is modulating, then the configuration and tuning of the Line Side
Converter may be causing the resonance.
Consider reducing the bandwidth of current and voltage regulators. When parameter 13:300 [BusDistRej Mode] is set
to 2 'FF Power', refer to parameters 13:55 [Volt Reg BW] and 13:75 [Curr Reg BW].
.
.
If this event occurs while the line side converter is not modulating, then equipment that shares the source of AC power
may be causing the resonance. Consider changing the power distribution scheme. Consider installing a form of magnetic
isolation, such as an isolation transformer or line reactor. Also consider using the Energy Pause function, which
disconnects the line side converter from the AC source when not needed. For information about configuring the Energy
Pause feature, see PowerFlex 750-Series Products with TotalFORCE Control Reference Manual, publication
750-RM100
.
High Inertia Loads
This section provides information about configuring a drive that is used in an application with a high inertia load.
Acceleration Time
In applications with high inertia of the load and motor rotating mass, the length of the acceleration time is an important
consideration. A typical application where this consideration applies is a centrifugal fan load. High inertia loads can cause
overload conditions of the motor, overload conditions of the drive, or overcurrent conditions of the drive. These issues
can result in the following:
• A motor overload fault (code 10003)
• A drive overload fault (code 10028)
• A software overcurrent fault (code 10092)
• A hardware overcurrent fault (code 10093)
Rockwell Automation Publication 750-QS100B-EN-P - August 2020 57
Page 58

Appendix A Reference Information
To help prevent faults that are related to overload and overcurrent conditions, acceleration time must be set to the
capabilities of the drive based on the load and application requirements. The normal solution is to set parameter 10:1915
[VRef Accel Time 1] to a longer time period so that an overload or overcurrent condition of the drive does not occur.
To set parameter 10:1915 [VRef Accel Time 1], incrementally increase the acceleration time by a 30 second interval, and
after each increase, restart the drive. Repeat this process until the load is able to start without a fault condition. The
maximum acceleration time for most applications is up to 5 minutes, however high inertia loads could require higher
acceleration times. For example, 30 minutes may be common for a centrifuge. If faster acceleration time is required for
the load, contact your local distributor or Rockwell Automation® technical support for further application review or
potential drive sizing considerations.
Recommendation
If the load has a large inertia value, and acceleration time is not an application concern, set the current limit of the drive in
amps to the continuous current rating of the drive in amps. This current limit setting lets the drive apply its rated current
to the motor on a continuous basis until the application reaches full speed. The overload current setting is configured in
parameter 10:222 [Current Limit 1]. Default values for this parameter that are time limited equal 110% of the Normal
Duty (ND), or 150% of the Heavy Duty (HD) rating of the drive that may have induced a hardware overcurrent fault. To
obtain the continuous current rating of the drive, see parameter 10:21 [Rated Amps]. If the application can never reach
full speed, it is an indication that the motor and/or the drive may be undersized for the application. Contact your
Local distributor or Rockwell Automation technical support for further application review, or potential drive sizing
considerations.
Deceleration Time
If the drive faults on either an overload (F10003 or F10028), or an overvoltage (F10107) fault condition during
deceleration, it is likely due to the deceleration time being too short for the system, which results in the fault condition.
There are two ways to eliminate the fault condition:
• The drive can be set to coast to rest (parameter 10:110 [Mtr Stop Mode A] set = 0 'Coast').
• The deceleration time can be increased (parameter 10:1917 [VRef Decel Time 1] set to a larger value).
Set parameter 10:1917 [VRef Decel Time 1] to the longest necessary deceleration time allowed by the system. If drive
faults or DC bus overvoltage conditions continue to exist, dynamic braking can be required.
PowerFlex® 755TR regenerative drives are capable of regeneration to the AC line and should not require dynamic
braking.
PowerFlex 755TL low harmonic AC drives do not have regeneration capability and may benefit from the addition of a
dynamic brake resistor. See PowerFlex Dynamic Braking Resistor Calculator, publication PFLEX-AT001
how to apply a dynamic brake to the application.
, to understand
58 Rockwell Automation Publication 750-QS100B-EN-P - August 2020
Page 59

Reference Information Appendix A
Disable the HIM Start Function
There are times when disabling the HIM is necessary, such as the following situations:
• You only need to use the other discrete input.
• You only need to use communications that are controlled by Start/Run, Jog, and Direction commands.
Parameter 0:41 [Logic Mask] is used to disable or 'mask out' the HIM from performing any Start, Jog, and Direction
Logic function. Bits 1…3 correspond to a HIM connected to ports 1…3. The default setting is all bits set to '1', ports
enabled, or unmasked.
Setting parameter 0:41 [Logic Mask] bits 1…3 equal to '0' disables operation from the HIM that is installed in
ports 1…3.
IMPORTANT Setting parameter 0:41 [Logic Mask] bits to '0' to disable the Start, Jog, and Direction commands does not mask the Stop
commands. The Stop function cannot be disabled.
Using the HIM CopyCat Function
It is possible to store a set of drive parameters within the HIM. You can upload drive parameters from the drive to the
HIM, then use the HIM to download the same set of parameters to a new drive. Detailed information regarding the
HIM CopyCat function can be found in the PowerFlex 20-HIM-A6 and 20-HIM-C6S HIM user manual,
publication 20HIM-UM001
The following applies when downloading parameters from the HIM to a drive:
•The drive must be Stopped.
• Do not use the HIM CopyCat function if the port 9, Embedded DeviceLogix application is enabled. To use the
HIM CopyCat feature, first disable the embedded DeviceLogix by navigating to parameter 9:1000 [DLX
OperationCmd]. Edit the value to 0 'DisableLogic'. Navigate to parameter 9:1001 [DLX OperationSts] and check
if the value is 0 'LogicDisabld'.
• If the drive is communicating with Logix™ controller (the controller is 'Online'), the HIM CopyCat function does
not operate. To use the HIM CopyCat function, inhibit the IO connection to the Logix controller.
.
Rockwell Automation Publication 750-QS100B-EN-P - August 2020 59
Page 60

Appendix A Reference Information
Calculating AC Line Impedance
If your system uses a line reactor, you must adjust AC line kVA (parameter 13:32 [AC Line kVA A]), and
AC line impedance (parameter 13:34 [AC Line Imped% A]) using the following equations and information:
For Converter Rated Volts, use the value of parameter 13:25 [Line Side Converter Rated Voltage].
For Converter Rated Amps, use the value of parameter 13:26 [Line Side Converter Rated Current].
Example
A drive system has:
• A 2500 kVA transformer with 7% impedance
• A linear reactor with 5% impedance
• Converter Rated Volts of 480
• Converter Rated Amps of 761
In this case:
• Set parameter 13:32 [AC Line kVA A] to 2500.
• Set parameter 13:34 [AC Line Imped% A] to 27, as found in the calculations below:
60 Rockwell Automation Publication 750-QS100B-EN-P - August 2020
Page 61

PowerFlex 750-Series AC Drives with TotalFORCE Control Quick Start
Additional Resources
These documents contain additional information concerning related products from Rockwell Automation.
Resource Description
Industrial Automation Wiring and Grounding Guidelines, publication 1770-4.1
PowerFlex 750-Series Products with TotalFORCE Control Technical Data,
publication 750-TD100
PowerFlex 750-Series Products with TotalFORCE Control Installation
Instructions, publication 750-IN100
PowerFlex 755T Flux Vector Tuning Application Technique,
publication 750-AT006
PowerFlex 20-HIM-A6 / -C6S HIM (Human Interface Module) User Manual,
publication 20HIM-UM001
Low Voltage Motor Protection White Paper, publication 193-WP008
PowerFlex 755TM IP00 Open Type Kits Installation Instructions, publication
750-IN101
PowerFlex 755TM AC Precharge Modules Unpacking and Lifting Instructions,
publication 750-IN102
PowerFlex 755TM DC Precharge Modules Unpacking and Lifting Instructions,
publication 750-IN103
PowerFlex 755TM Power and Filter Modules Unpacking and Lifting
Instructions, publication 750-IN104
PowerFlex 750-Series Service Cart and DCPC Module Lift Instructions,
publication 750-IN105
PowerFlex 755TM Power and Filter Module Storage Hardware Instructions,
publication 750-IN106
PowerFlex 755T Module Service Ramp Instructions, publication 750-IN108
PowerFlex 755TM IP00 Open Type Kits Technical Data, publication 750-TD101
PowerFlex 750-Series Products with TotalFORCE Control Hardware Service
Manual, publication 750-TG100
PowerFlex 750-Series Safe Speed Monitor Option Module Safety Reference
Manual, publication 750-RM001
PowerFlex 750-Series Safe Torque Off Option Module User Manual,
publication 750-UM002
PowerFlex 750-Series ATEX Option Module User Manual, publication 750-
UM003
PowerFlex 755 Integrated Safety - Safe Torque Off Option Module User
Manual, publication 750-UM004
PowerFlex 755/755T Integrated Safety Functions Option Module User Manual,
publication 750-UM005
PowerFlex Drives with TotalFORCE Control Built-in EtherNet/IP Adapter User
Manual, publication 750COM-UM009
Industry Installation Guidelines for Pulse Width Modulated (PWM) AC Drives,
publication DRIVES-AT003
Drives in Common Bus Configurations with PowerFlex 755TM Bus Supplies
Application Techniques, publication DRIVES-AT005
PowerFlex 750-Series I/O, Feedback, and Power Option Modules Installation
Instructions, publication 750-IN111.
Provides general guidelines for installing a Rockwell Automation industrial system.
Provides detailed information on:
• Drive and bus supply specifications
• Option specifications
• Fuse and circuit breaker ratings
Provides the basic steps to install PowerFlex® 755TL low harmonic drives, PowerFlex 755TR
regenerative drives, and PowerFlex 755TM drive systems.
Provides guidance on how to tune Flux Vector position and velocity loops, filters, and other
features to achieve the level of performance that is required for a given application. This
publication is intended for novice drives users and users with advanced skills.
Provides detailed information on HIM components, operation, and features.
Provides information about short-circuit protection, and overload protection for low voltage
motors.
Provides instructions to install IP00 Open Type kits in user-supplied enclosures.
These publications provide detailed information on:
• Component weights
• Precautions and recommendations
• Hardware attachment points
• Lifting the component out of the packaging
Provides detailed setup and operating instructions for the module service cart and DC
precharge module lift.
Provides detailed installation and usage instructions for this hardware accessory.
Provides detailed usage instructions for the module service ramp.
Provides detailed information on:
• Kit selection
• Kit ratings and specifications
• Option specifications
Provides detailed information on:
• Preventive maintenance
• Component testing
• Hardware replacement procedures
These publications provide detailed information on installation, setup, and operation of the
750-Series safety option modules.
Provides information on how to install, configure, and troubleshoot applications for the
PowerFlex drives with the built-in EtherNet/IP™ adapter.
Provides basic information on enclosure systems, considerations to help protect against
environmental contaminants, and power and grounding considerations for installing Pulse
Width Modulated (PWM) AC drives.
Provides basic information to properly wire and ground the following products in common
bus applications:
• PowerFlex 755TM drive system for common bus solutions
• PowerFlex 750-Series AC and DC input drives
• Kinetix™ 5700 servo drives
Provides drive compatibility, jumper settings, terminal designations, wiring examples for
analog and digital I/O, feedback, and auxiliary power options option modules.
Rockwell Automation Publication 750-QS100B-EN-P - August 2020 61
Page 62

PowerFlex 750-Series AC Drives with TotalFORCE Control Quick Start
Resource Description
Wiring and Grounding Guidelines for Pulse Width Modulated (PWM) AC Drives,
publication DRIVES-IN001
EtherNet/IP Network Devices User Manual, ENET-UM006
Ethernet Reference Manual, ENET-RM002
System Security Design Guidelines Reference Manual, SECURE-RM001
Industrial Components Preventive Maintenance, Enclosures, and Contact
Ratings Specifications, publication IC-TD002
Safety Guidelines for the Application, Installation, and Maintenance of
Solid-State Control, publication SGI-1.1
Provides basic information to properly wire and ground PWM AC drives.
Describes how to configure and use EtherNet/IP devices to communicate on the EtherNet/IP
network.
Describes basic Ethernet concepts, infrastructure components, and infrastructure features.
Provides guidance on how to conduct security assessments, implement Rockwell
Automation products in a secure system, harden the control system, manage user access,
and dispose of equipment.
Provides a quick reference tool for Allen-Bradley® industrial automation controls and
assemblies.
Designed to harmonize with NEMA Standards Publication No. ICS 1.1-1987 and provides
general guidelines for the application, installation, and maintenance of solid-state control in
the form of individual devices or packaged assemblies incorporating solid-state
components.
You can view or download publications at rok.auto/literature. You can access declarations of conformity, certificates,
other certification details, and product drawings at rok.auto/documentation
.
62 Rockwell Automation Publication 750-QS100B-EN-P - August 2020
Page 63

Notes:
PowerFlex 750-Series AC Drives with TotalFORCE Control Quick Start
Rockwell Automation Publication 750-QS100B-EN-P - August 2020 63
Page 64

Rockwell Automation Support
Use these resources to access support information.
Technical Support Center Find help with how-to videos, FAQs, chat, user forums, and product notification updates. rok.auto/support
Knowledgebase Access Knowledgebase articles. rok.auto/knowledgebase
Local Technical Support Phone Numbers Locate the telephone number for your country. rok.auto/phonesupport
Literature Library Find installation instructions, manuals, brochures, and technical data publications. rok.auto/literature
Product Compatibility and Download Center
(PCDC)
Get help determining how products interact, check features and capabilities, and find
associated firmware.
rok.auto/pcdc
Documentation Feedback
Your comments help us serve your documentation needs better. If you have any suggestions on how to improve our
content, complete the form at rok.auto/docfeedback
.
Waste Electrical and Electronic Equipment (WEEE)
At the end of life, this equipment should be collected separately from any unsorted municipal waste.
Rockwell Automation maintains current product environmental information on its website at rok.auto/pec.
Allen-Bradley, Connected Components Workbench, DeviceLogix, expanding human possibility, Kinetix, Logix, PowerFlex, Rockwell Automation, and TotalFORCE are trademarks of Rockwell
Automation, Inc.
EtherNet/IP is a trademark of ODVA, Inc.
Trademarks not belonging to Rockwell Automation are property of their respective companies.
Rockwell Otomasyon Ticaret A.Ş. Kar Plaza İş Merkezi E Blok Kat:6 34752, İçerenkÖy, İstanbul, Tel: +90 (216) 5698400 EEE YÖnetmeliğine Uygundur
Publication 750-QS100B-EN-P - August 2020
Supersedes Publication 750-QS100 A-EN-P - July 2019 Copyright © 2020 Rockwell Automation, Inc. All rights reserved. Printed in the U.S.A.
 Loading...
Loading...