

Page 1

User Manual
PowerFlex 525 Embedded EtherNet/IP Adapter
Page 2

Important User Information
IMPORTANT
Solid-state equipment has operational characteristics differing from those of electromechanical equipment. Safety
Guidelines for the Application, Installation and Maintenance of Solid State Controls (publication
your local Rockwell Automation® sales office or online at
http://www.rockwellautomation.com/literature/
important differences between solid-state equipment and hard-wired electromechanical devices. Because of this difference,
and also because of the wide variety of uses for solid-state equipment, all persons responsible for applying this equipment
must satisfy themselves that each intended application of this equipment is acceptable.
In no event will Rockwell Automation, Inc. be responsible or liable for indirect or consequential damages resulting from the
use or application of this equipment.
The examples and diagrams in this manual are included solely for illustrative purposes. Because of the many variables and
requirements associated with any particular installation, Rockwell Automation, Inc. cannot assume responsibility or
liability for actual use based on the examples and diagrams.
No patent liability is assumed by Rockwell Automation, Inc. with respect to use of information, circuits, equipment, or
software described in this manual.
Reproduction of the contents of this manual, in whole or in part, without written permission of Rockwell Automation,
Inc., is prohibited.
Throughout this manual, when necessary, we use notes to make you aware of safety considerations.
SGI-1.1 available from
) describes some
WARNING: Identifies information about practices or circumstances that can cause an explosion in a hazardous environment,
which may lead to personal injury or death, property damage, or economic loss.
ATTENTION: Identifies information about practices or circumstances that can lead to personal injury or death, property
damage, or economic loss. Attentions help you identify a hazard, avoid a hazard, and recognize the consequence.
SHOCK HAZARD: Labels may be on or inside the equipment, for example, a drive or motor, to alert people that dangerous
voltage may be present.
BURN HAZARD: Labels may be on or inside the equipment, for example, a drive or motor, to alert people that surfaces may
reach dangerous temperatures.
Identifies information that is critical for successful application and understanding of the product.
Allen-Bradley, Rockwe ll Automation, Rockwell Soft ware, PowerFlex, Studio 5000 and Conne cted Components Workbench are trademarks of Rockwell Automation, Inc.
Trademarks not belonging to Rockwell Automation are property of their respective companies.
Page 3

Overview
Getting Started
Setting Up the Adapter
Table of Contents
Important User Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
Preface
Recommended Documentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Manual Conventions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Chapter 1
Components. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Compatible Products . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Required Equipment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Safety Precautions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Quick Start . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Status Indicators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Chapter 2
Preparing for Set-Up . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Setting the IP Address . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Connecting the Adapter to the Network . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Applying Power . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Commissioning the Adapter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Configuring the Adapter
Configuring the I/O
Using the I/O
Chapter 3
Configuration Tools. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Using the Drive Keypad Interface to Access Parameters . . . . . . . . . . . . . 22
Using the PowerFlex 4-Class HIM to Access Parameters. . . . . . . . . . . . . 23
Using BOOTP. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Setting the IP Address, Subnet Mask, and Gateway Address. . . . . . . . . . 27
Setting the Data Rate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Using Master-Slave Hierarchy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Setting a Fault Action . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Resetting the Adapter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Viewing the Adapter Status Using Parameters . . . . . . . . . . . . . . . . . . . . . . 32
Chapter 4
Using RSLinx Classic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
CompactLogix Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Limitations in Using MicroLogix 1100/1400 . . . . . . . . . . . . . . . . . . . . . . . 58
Chapter 5
About I/O Messaging . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Understanding the I/O Image. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Using Logic Command/Status . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 3
Page 4

Table of Contents
Using Explicit Messaging
Using Multi-Drive Mode
Using Reference/Feedback . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Using Datalinks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Example Ladder Logic Program Information . . . . . . . . . . . . . . . . . . . . . . . 62
CompactLogix Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
Chapter 6
About Explicit Messaging . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Performing Explicit Messaging . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
CompactLogix Examples. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
Chapter 7
Single-Drive Mode vs. Multi-Drive Mode . . . . . . . . . . . . . . . . . . . . . . . . . . 81
System Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
Understanding the I/O Image. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
Configuring the RS-485 Network . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
Using Multi-Drive Add-On Profile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Multi-Drive Ladder Logic Program for Generic Profile . . . . . . . . . . . . . . 95
CompactLogix Example Using Generic Profile . . . . . . . . . . . . . . . . . . . . . 97
Multi-Drive Mode Explicit Messaging . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
Additional Information. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
Troubleshooting
Specifications
Adapter Parameters
EtherNet/IP Objects
Chapter 8
Understanding the Status Indicators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
ENET Status Indicator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
LINK Status Indicator. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
Viewing Adapter Diagnostic Items. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
Viewing and Clearing Events . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
Appendix A
Communication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
Regulatory Compliance. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
Appendix B
Parameter List . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
Appendix C
Supported Data Types . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
Identity Object. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
Assembly Object . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
Register Object. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
Parameter Object . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
PCCC Object . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
DPI Device Object . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
DPI Parameter Object . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
4 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 5

Logic Command/Status Words:
PowerFlex 525 Drives
Index
Table of Contents
DPI Fault Object. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
TCP/IP Interface Object . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
Ethernet Link Object. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
Appendix D
Logic Command Word . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
Logic Status Word . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
Glossary
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 5
Page 6

Table of Contents
Notes:
6 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 7

Overview
For information on… See page…
Recommended Doc umentation
Manual Conventions 7
7
Preface
Recommended
Documentation
All the recommended documentation listed in this section is available online at
http://www.rockwellautomation.com/literature
.
The following publications provide additional information:
For... See... Publication
EtherNet/IP™ EtherNet/IP Media Planning and Installation Manual
EtherNet/IP Network Infrastructure Guidelines
EtherNet/IP Network Configuration User Manual
Troubleshoot EtherNet/IP Networks
EtherNet/IP Design, Commissioning, and
Troubleshooting Quick Reference Drawings
Ethernet Design Considerations Reference Manual
PowerFlex®520-Series Drives PowerFlex 525 Adjustable Frequency AC Drive User Manual
HIM (Human Interface Module) PowerFlex 4-Class HIM (DSI) Quick Reference
RSLinx® Classic RSLinx Classic Getting Results Guide
RSLogix™ 5000 RSLogix 5000 online help
CompactLogix™ 5370 CompactLogix 5370 Controllers User Manual (1769-L36ERM)
MicroLogix™ 1100 MicroLogix 1100 Programmable Controllers User Manual
MicroLogix™ 1400 MicroLogix 1400 Programmable Controllers User Manual
(1) For ODVA publications, see the ODVA Ethernet/IP library at
http://odva.org/Home/ODVATECHNOLOGIES/EtherNetIP/EtherNetIPLibrary/tabid/76/lng/en-US/Default.aspx
(2) The online help is installed with the software.
(2)
(2)
(1)
(1)
ODVA Pub. 148
ODVA Pub. 35
ENET-UM001
ENET-AT003
IASIMP-QR023
ENET-RM002
520-UM001
22HIM-QR001
LINX-GR001
–
1769-UM021
1763-UM001
1766-UM001
Manual Conventions
This manual provides information about the EtherNet/IP adapter embedded on
the Main Control Board in PowerFlex 525 drives, and using it for network
communication.
The following conventions are used throughout this manual:
• Parameter names are shown in the format axxx [*]. The a represents the
parameter group. The xxx represents the parameter number. The *
represents the parameter name— for example C141 [EN Rate Cfg].
• Menu commands are shown in bold type face and follow the format Menu
> Command. For example, if you read “Select File > Open,” yo u s ho ul d
click the File menu and then click the Open command.
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 7
Page 8

Preface Overview
• The Studio 5000™ Engineering and Design Environment combines
engineering and design elements into a common environment. The first
element in the Studio 5000 environment is the Logix Designer
application. The Logix Designer application is the rebranding of
RSLogix 5000 software and will continue to be the product to program
Logix 5000 controllers for discrete, process, batch, motion, safety, and
drive-based solutions. The Studio 5000 environment is the foundation for
the future of Rockwell Automation engineering design tools and
capabilities. It is the one place for design engineers to develop all the
elements of their control system.
• RSLogix 5000 (version 20.0) was used for the screen captures in this
manual. Different versions of the software may differ in appearance and
procedures.
8 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 9

Chapter 1
Esc
Sel
Item Part Description
➊ ENET status
indicator
Two LEDs that indicate the status
of the embedded EtherNet/IP
adapter and network
communications.
LINK status
indicator
➋ Ethernet port An RJ-45 connector for the
Ethernet cable. It is CAT-5
compliant to ensure reliable
data transfer on 100Base-Tx
Ethernet connections.
➌ DSI port An RS485 cable connection for
handheld and remote options.
Shown with control module cover removed
➊
➋➌
Getting Started
The EtherNet/IP adapter, embedded on the Main Control Board in
PowerFlex 525 drives, is used for network communication.
Top ic Pa ge
Components
Feature s 10
Compatible Products 10
Required Equipment 10
Safety Precautions 12
Quick Start 12
Status Indicators 13
9
Components
Components of the Embedded EtherNet/IP Adapter
FWD
ENET LINK
EtherNet/IP
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 9
Page 10

Chapter 1 Getting Started
Features
The features of the embedded EtherNet/IP adapter include:
• Drive parameters to set an IP address – or you can use a BOOTP server to
configure the IP address.
• Compatibility with various configuration tools to configure the embedded
EtherNet/IP adapter and host drive. The tools include the PowerFlex 4/
40-class HIM (Human Interface Module 22-HIM-A3 or 22-HIM-C2S),
and drive-configuration software such as RSLogix 5000 (version 17.0 or
greater), Logix Designer (version 21.0 or greater), and Connected
Components Workbench (version 3.0 or greater).
• Status indicators on the drive’s LCD display that report the status of the
embedded EtherNet/IP adapter and network communications.
• Parameter-configured 16-bit Datalinks in the I/O to meet application
requirements (four Datalinks to write data from the network to the drive,
and four Datalinks to read data to the network from the drive).
• Explicit Messaging support.
• Master-Slave hierarchy that can be config ured to transmit data to and from
a controller on the network.
• Multi-drive mode which allows up to five drives to share a single
EtherNet/IP node.
• User-defined fault actions to determine how the embedded EtherNet/IP
adapter and its host PowerFlex 525 drive respond to:
– I/O messaging communication disruptions (Comm Flt Action)
– Controllers in idle mode (Idle Flt Action)
• Automatic Device Configuration (ADC) is an RSLogix 5000 (version
20.0 or greater), and Logix Designer (version 21.0 or greater) feature that
supports the automatic download of configuration data upon the Logix
controller establishing an EtherNet/IP network connection to a
PowerFlex 525 drive and its associated peripherals.
Compatible Products
Required Equipment
10 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
At the time of publication, the embedded EtherNet/IP adapter is compatible
with Allen-Bradley PowerFlex 525 drives.
Equipment Shipped with the Drive
Since the EtherNet/IP adapter is embedded on the Main Control Board in the
PowerFlex 525 drive, it is always an integral part of the drive and, therefore, is not
shipped with installation instructions.
Page 11
Getting Started Chapter 1
User-Supplied Equipment
The embedded EtherNet/IP adapter can be configured using the built-in keypad
interface on the drive. In addition, you must supply:
❑ Ethernet cable (see the EtherNet/IP Media Planning and Installation Manual, ODVA publication 148 available on the
ODVA web site at http://odva.org/Home/ODVATECHNOLOGIES/EtherNetIP/EtherNetIPLibrary/tabid/76/Default.aspx
for details)
❑ Ethernet switch (see the Ethernet Design Considerations Reference Manual, Rockwell Automation publication
ENET-RM002 for details)
❑ Optional configuration tool, such as:
– PowerFlex 22-HIM-A3/-C2S HIM
– DHCP/BOOTP Utilities
❑ Controller configuration software, such as:
– RSLinx Classic (version 2.60 or later)
– RSLogix 5000 (version 17.0 or greater) and Logix Designer (version 21.0 or greater) when using drive-specific
Add-On Profile (AOP)
– Connected Components Workbench (version 3.0 or greater)
❑ A PC connection to the EtherNet/IP network
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 11
Page 12

Chapter 1 Getting Started
Safety Precautions
Please read the following safety precautions carefully.
ATT EN TI ON : Risk of injury or equipment damage exists. Only personnel
familiar with drive and power products and the associated machinery should
plan or implement the installation, start up, configuration, and subsequent
maintenance of the drive using this embedded adapter. Failure to comply may
result in injury and/or equipment damage.
ATT EN TI ON : Risk of equipment damage exists. The embedded adapter
contains ESD (Electrostatic Discharge) sensitive parts that can be damaged if
you do not follow ESD control procedures. Static control precautions are
required when handling the adapter. If you are unfamiliar with static control
procedures, see Guarding Against Electrostatic Damage (publication 8000-
4.5.2)
ATT EN TI ON : Risk of injury or equipment damage exists. If the adapter is
transmitting control I/O to the drive, the drive may fault when you reset the
adapter. Determine how your drive will respond before resetting the adapter.
ATT EN TI ON : Risk of injury or equipment damage exists. Drive parameters
C143 [EN Comm Flt Actn] and C144 [EN Idle Flt Actn] let you determine the
action of the embedded EtherNet/IP adapter and drive if I/O communication is
disrupted, the controller is idle, or explicit messaging for drive control is
disrupted. By default, these parameters fault the drive. You may configure these
parameters so that the drive continues to run, however, precautions should be
taken to ensure that the settings of these parameters do not create a risk of
injury or equipment damage. When commissioning the drive, verify that your
system responds correctly to various situations (for example, a disconnected
cable or a controller in idle state).
ATT EN TI ON : Risk of injury or equipment damage exists. When a system is
configured for the first time, there may be unintended or incorrect machine
motion. Disconnect the motor from the machine or process during initial system
testing.
ATT EN TI ON : Risk of injury or equipment damage exists. The examples in this
publication are intended solely for purposes of example. There are many
variables and requirements with any application. Rockwell Automation, Inc.
does not assume responsibility or liability (to include intellectual property
liability) for actual use of the examples shown in this publication.
Quick Start
This section is provided to help experienced users quickly start using the
embedded EtherNet/IP adapter. If you are unsure how to complete a step, refer to
the referenced chapter.
Step Action See...
1 Review the safety precautions for the adapter. Throughout this manual
2 Verify that the PowerFlex drive is properly installed. PowerFlex 525
3 Connect the drive to the EtherNet/IP network.
Verify that the PowerFlex drive is not powered. Then, connect the embedded EtherNet/
IP adapter to the network using an Ethernet cable.
12 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Adjusta ble Frequency AC
Drive User Manual
(publication
Chapter 2,
Setting Up the Adapter
520-UM001
)
Page 13

Getting Started Chapter 1
Esc
Sel
Item Name
➊ ENET indicator
➋ LINK indicator
➊➋
Step Action See...
4 Apply power to the drive.
a. Replace the control module cover.
b. The embedded EtherNet/IP adapter receives power from the drive. Apply power
to the drive. The ENET/LINK status indicators on the drive’s LCD display should
light up and remain steady or flash. If the drive’s Fault LED lights up, there is a
problem. See
c. Configure/verify key drive parameters.
5 Configure the adapter for your application.
Set drive parameters for the following functions as required by your application:
– IP address, subnet mask, and gateway address
– Data rate
– I/O configuration
– Master-Slave hierarchy
– Fault actions
6 Configure the controller to communicate with the adapter.
Use a controller configuration tool such as RSLogix 5000/Logix Designer to configure
the master on the EtherNet/IP network to recognize the embedded EtherNet/IP
adapter and drive.
7 Create a ladder logic program.
Use a controller configuration tool such as RSLogix 5000/Logix Designer to create a
ladder logic program that enables you to:
– Control the embedded EtherNet/IP adapter and drive using I/O.
– Monitor or configure the drive usin g Explicit messages.
Chapter 8, Troubleshooting.
Chapter 2,
Setting Up the Adapter
Chapter 3,
Configuring the Adapter
Chapter 4,
Configuring the I/O
Chapter 5,
Using the I/O
Chapter 6,
Using Explicit Messaging
Status Indicators
The embedded EtherNet/IP adapter uses two status indicators to report its
operating status.
FWD
ENET LINK
EtherNet/IP
ENET LINK
EtherNet/IP
After connecting the embedded EtherNet/IP adapter to the network and
applying power to the drive, see
Startup Status Indication
on page 17 for possible
start-up status indications and their descriptions.
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 13
Page 14

Chapter 1 Getting Started
Notes:
14 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 15
Chapter 2
Setting Up the Adapter
Since the EtherNet/IP adapter is embedded on the Main Control Board in the
PowerFlex 525 drive, the only required step is setting its IP address and
connecting it to the network.
Top ic Pag e
Preparing for Set-Up 15
Setting the IP Address 16
Connecting the Adapter to the Network 16
Applying Power 17
Commissioning the Adapter 19
Preparing for Set-Up
Before setting up the embedded EtherNet/IP adapter:
• Make sure the Ethernet switch is the correct type. A “managed” switch that
supports IGMP snooping is usually recommended. An “unmanaged”
switch can be used instead if RSLogix 5000 (version 18.0 or greater) is
used and all devices on the network are configured for “unicast” I/O. For
more details, see the following documents:
– EtherNet/IP Media Planning and Installation Manual
(ODVA publication 148)
– EtherNet/IP Network Infrastructure Guidelines
(ODVA publication 35)
– Ethernet Design Considerations Reference Manual
(Rockwell Automation publication
• Understand IGMP Snooping/Ethernet Switches
The embedded EtherNet/IP adapter is a multicast device. In most
situations, an IGMP snooping (managed) switch is required. If more than
one or two embedded EtherNet/IP adapters are connected to the switch, a
managed switch is required—otherwise the drive may fault on a Net I/O
Timeout network loss. The embedded EtherNet/IP adapter,
RSLogix 5000 (version 18.0 or greater), and a ControlLogix or
CompactLogix controller will support unicast. Unicast setup is required
when adding the drive to the I/O. When all embedded EtherNet/IP
adapters are set up as unicast devices, then an IGMP snooping (managed)
switch is not needed.
ENET-RM002
)
Much of EtherNet/IP implicit (I/O) messaging uses IP multicast to
distribute I/O control data, which is consistent with the CIP producer/
consumer model. Historically, most switches have treated multicast
packets the same as broadcast packets. That is, all multicast packets are retransmitted to all ports.
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 15
Page 16
Chapter 2 Setting Up the Adapter
IMPORTANT
IGMP snooping constrains the flooding of multicast traffic by dynamically
configuring switch ports so that multicast traffic is forwarded only to ports
associated with a particular IP multicast group.
Switches that support IGMP snooping (managed switches) “learn” which
ports have devices that are part of a particular multicast group and only
forward the multicast packets to the ports that are part of the multicast
group.
Be careful as to what level of support a switch has of IGMP snooping.
Some layer 2 switches that support IGMP snooping require a router
(which could be a layer 3 switch) to send out IGMP polls to learn what
devices are part of the multicast group. Some layer 2 switches can use
IGMP snooping without a router sending polls. If your control system is a
stand-alone network or is required to continue performing if the router is
out of service, make sure the switch you are using supports IGMP
snooping without a router being present.
Appendix A
• See
embedded EtherNet/IP adapter.
• Verify that you have all required equipment. See
page 10.
for the number of CIP connections supported by the
Required Equipment
on
Setting the IP Address
Connecting the Adapter to
the Network
There are two methods for configuring the embedded EtherNet/IP adapter’s IP
address:
• BOOTP Server – Use BOOTP if you prefer to control the IP addresses of
devices using a BOOTP server. The IP address, subnet mask, and gateway
addresses will then be provided by the BOOTP server. This is enabled by
default.
• Parameters – Use parameters when you want more flexibility in setting up
the IP address, or need to communicate outside the control network using
a gateway. The IP address, subnet mask, and gateway addresses will then
come from the parameters you set.
Regardless of the method used to set the adapter’s IP address, each node on
the network must have a unique IP address. To change an IP address, you must
set the new value and then remove and reapply power to (or reset) the drive.
ATT EN TI ON : Risk of injury or death exists. The PowerFlex drive may contain
high voltages that can cause injury or death. Remove power from the drive, and
then verify power has been discharged before connecting the embedded
EtherNet/IP adapter to the network.
1. Remove power from the drive.
2. Remove the drive control module cover.
16 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 17

Setting Up the Adapter Chapter 2
1 (Front)1 (Front)1 (Front)
2 (Rear)
00:00:BC:2E:69:F6
Esc
Sel
Ethernet
switch
1769-L36ERM CompactLogix controller
with embedded EtherNet/IP bridge
PowerFlex 525 drive with
embedded EtherNet/IP
adapter (Frame A shown)
3. Use static control precautions.
4. Connect one end of an Ethernet cable to the EtherNet/IP network.
5. Route the other end of the Ethernet cable through the bottom of the
PowerFlex 525 drive, and insert the cable’s plug into the embedded
EtherNet/IP adapter’s mating socket (item 2 in
Components of the
Embedded EtherNet/IP Adapter on page 9).
Applying Power
Install the control module cover, and apply power to the drive. The embedded
EtherNet/IP adapter receives its power from the drive. When you apply power to
the embedded EtherNet/IP adapter for the first time, the “ENET” status
indicator on the drive LCD display should remain steady after an initialization. If
it does not light up or is flashing, there is a problem. See
Troubleshooting.
Startup Status Indication
After power has been applied, status indicators for the PowerFlex 525 drive and
embedded EtherNet/IP adapter can be viewed on the drive LCD display. See
Drive and Adapter Status Indicators
status indications.
ATT EN TI ON : Risk of equipment damage, injury, or death exists. Unpredictable
operation may occur if you fail to verify that parameter settings are compatible
with your application. Verify that settings are compatible with your application
before applying power to the drive.
Chapter 8,
on page 18 for their location and possible
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 17
Page 18

Chapter 2 Setting Up the Adapter
TIP
Esc
Sel
Item Name State Description
➊ ENET Off Adapter is not connected to the network.
Steady Adapter is connected to the network and drive is controlled through Ethernet.
Flashing Adapter is connected to the network but drive is not controlled through Ethernet.
➋ LINK Off Adapter is not connected to the network
Steady Adapter is connected to the network but not transmitting data.
Flashing Adapter is connected to the network and transmitting data.
➌ FAULT Flashing Red Indicates drive is faulted.
➊➋
➌
Drive and Adapter Status Indicators
FWD
ENET LINK
EtherNet/IP
ENET LINK
EtherNet/IP
For more details on status indicator operation see
Indicators on page 109.
Configuring/Verifying Key Drive Parameters
The PowerFlex 525 drive can be separately configured for the control and
Reference functions in various combinations. For example, you could set the
drive to have its control come from a peripheral or terminal block with the
Reference coming from the network. Or you could set the drive to have its
control come from the network with the Reference coming from another
peripheral or terminal block. Or you could set the drive to have both its control
and Reference come from the network.
18 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Configuring the drive parameters can be done using the drive’s keypad, a HIM,
RSLogix 5000/Logix Designer or Connected Components Workbench. In the
following example, the drive will receive the Logic Command and Reference
from the network.
1. Set the value of drive parameter P046 [Start Source 1]
to 5 “EtherNet/IP”.
2. Set the value of drive parameter P047 [Speed Reference1]
to 15 “EtherNet/IP”.
The PowerFlex 525 drive supports up to three control functions and
three Reference functions.
Understanding the Status
Page 19
Setting Up the Adapter Chapter 2
IMPORTANT
For more information on how to set different combinations of the control and
Reference functions, see the PowerFlex 525 drive user manual,
publication
520-UM001
.
Commissioning the Adapter
To commission the embedded EtherNet/IP adapter, you must set a unique IP
address. See the
server or parameters to set the IP address after connecting the adapter to the
network and applying power to the drive.
By default, the adapter is configured to accept an IP address from a BOOTP
server. For details, see
parameters, see
page 27.
Glossary
Setting the IP Address, Subnet Mask, and Gateway Address
New settings for some parameters (for example, parameters C129 [EN IP
Addr Cfg 1] through C132 [EN IP Addr Cfg 4]) are recognized only when
power is applied to the adapter. After you change parameter settings, cycle
drive power.
for details about IP addresses. Use either a BOOTP
Using BO OTP
on page 24. To set the IP address using
on
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 19
Page 20

Chapter 2 Setting Up the Adapter
Notes:
20 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 21

Chapter 3
Configuring the Adapter
This chapter provides instructions and information for setting the parameters to
configure the embedded EtherNet/IP adapter.
Top ic Pa ge
Confi guration Tool s 21
Using the Drive Keypad Interface to Access Parameters 22
Using the PowerFlex 4-Class HIM to Access Parameters 23
Using BOOTP 24
Setting the IP Address, Subnet Mask, and Gateway Address 27
Setting the Data Rate 28
Using Master-Slave Hierarchy 29
Setting a Fault Action 31
Resetting the Ad apter 32
Viewing the Adapter Status Using Parameters 32
Configuration Tools
For a list of parameters, see
terms in this chapter, see the
Appendix B
Glossary
The parameters can be configured using the drive keypad interface (see
or a PowerFlex 4-class HIM (Human Interface Module, see
, Adapter Parameters. For definitions of
.
page 22)
page 23
).
RSLogix 5000 (version 17.0 or greater), Logix Designer (version 21.0 or greater),
and Connected Components Workbench (version 3.0 or greater) can also be
used to access the parameters.
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 21
Page 22

Chapter 3 Configuring the Adapter
HERT
Z
FWD
Esc
FWD
Esc
FWD
or
FWD
Sel
or
FWDorFWDFW
D
Sel
or
PROGRAM
FWD
or
PROGRAM
FWD
Sel
PROGRAM
FWD
Esc
or
FWDFW
D
or
Esc
FWD
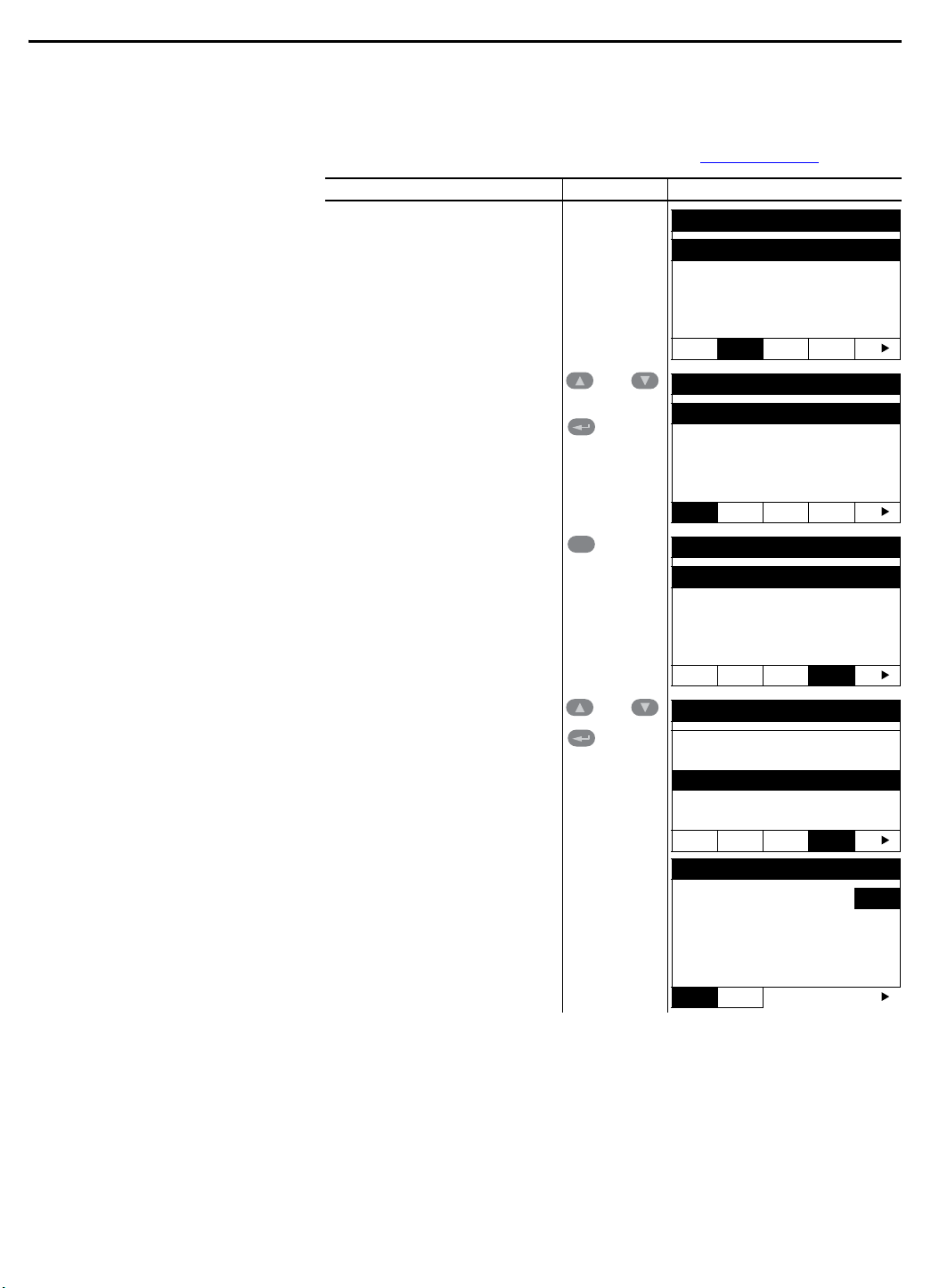
Using the Drive Keypad
Interface to Access
Parameters
The following is an example of basic integral keypad and display functions. This
example provides basic navigation instructions and illustrates how to program a
parameter.
Step Key(s) Example Display
1. When power is applied, the last user-selected
Basic Display Group parameter number is briefly
displayed with flashing characters. The display
then defaults to that parameter’s current value.
(Example shows the value of b001 [O utput
Freq] with the drive stopped.)
2. Press Esc to display the Basic Display Group
parameter number shown on power-up. The
parameter number will flash.
3. Press Esc to enter the parameter group list. The
parameter group letter will flash.
4. Press t he Up Arrow or Down Arrow to scroll
through the group list (b, P, t, C, L, d, A, f and
Gx).
5. Press Enter or Sel to enter a group. The right
digit of the last viewed parameter in that group
will flash.
6. Press t he Up Arrow or Down Arrow to scroll
through the parameter list.
7. Press Enter to view the value of the parameter.
Or
Press Esc to return to the para meter list.
8. Press Enter or Sel to enter Program Mode and
edit the value. The right digit will flash and the
word Program on the LCD display will light up.
9. Press the Up Arrow or D own Arrow to change
the parameter value.
10. If desired, press Sel to move from digit to digit
or bit to bit. The digit or bit that you can change
will flash.
11. Press Esc to cancel a change and exit Program
Mode.
Or
Press Enter to save a change and exit Program
Mode.
The digit will stop flashing and the word
Program on the LCD display will turn off.
12. Press Esc to return to the parameter list.
Continue to press Esc to back out of the
programming menu.
If pressing Esc does not change the display, then
b001 [Output Freq] is displayed. Press Enter or
Sel to enter the group list again.
22 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 23
Configuring the Adapter Chapter 3
Param eters
Groups
Linear List
Changed Params
DIAG
PAR A M DSEL MEM SEL
and
Basic Display
001 Output Freq
002 Commanded Freq
003 Output Current
004 Output Voltage
005 DC Bus Voltage
B PTCSEL
Sel
Communications
121 Comm Write Mode
122 Cmd Stat Select
123 RS485 Data Rate
124 RS485 Node Addr
125 Comm Loss Ac tion
BPTC SEL
and
Communications
121 Comm Write Mode
122 Cmd Stat Select
123 RS485 Data Rate
124 RS485 Node Addr
125 Comm Loss Ac tion
BPTC SEL
RS485 Data Rate
Param eter: # 123
9600
3
VALU E LIMITS SEL
Using the PowerFlex 4-Class
HIM to Access Parameters
The PowerFlex 4-class HIM can be used to access parameters in the drive (see
basic steps shown below). It is recommended that you read through the steps for
your HIM before performing the sequence. For additional HIM information,
refer to the HIM Quick Reference card, publication
Step Key(s) Example Display
1. Power up the drive. Then connect the HIM
to the DSI port of the drive. The Parameters
tab for the drive will be displayed.
2. Select Groups in the Parameters tab if it is
not already selected using the Up Arrow or
Down Arrow.
Press Enter to selec t Groups.
3. Press Sel repeatedly until the C tab
(Communications parameters) is selected.
22HIM-QR001.
4. Press the Up Arrow or Down Arrow to scroll
to the Communications parameter you
wish to display or modify, then press Enter.
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 23
Page 24

Chapter 3 Configuring the Adapter
RS485 Data Rate
Param eter: # 123
9600
3
VALU E LIMITS SEL
RS485 Data Rate
Param eter: # 123
19,200
4
VALU E LIMITS SEL
RS485 Data Rate
Param eter: # 123
19,200
4
VALU E LIMITS SEL
and
Esc
TIP
Step Key(s) Example Display
5. Press Enter to select the current paramete r
value and the numeric keys to enter a new
value.
6 Press Enter to write the new value to the
parameter and the parameter number will
be selected again.
Using BOOTP
7 While the parameter number is selected,
you may:
a. use the arrow keys to select
additional parameters you wish to
modify.
b. press Enter to go to the parameter
number you have input using the
keypad.
c. press Esc to return to the group
parameter list.
By default, the adapter is configured to accept an IP address, subnet mask, and
gateway address from a BOOTP server. You can select from a variety of BOOTP
utilities.
The instructions below use the DHCP/BOOTP Utility (version 2.3 or greater),
a free stand-alone program from Rockwell Automation that incorporates the
functionality of standard DHCP/BOOTP utilities with a graphical interface. It
is available from
http://www.ab.com/networks/ethernet/bootp.html
. See the
Readme file and online Help for directions and more information.
If desired, you can disable BOOTP and configure the IP address, subnet mask,
and gateway address using parameters. For details, see
Setting the IP Address,
Subnet Mask, and Gateway Address on page 27.
24 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 25

Configuring the Adapter Chapter 3
Ethernet Address label example
Configuring the Adapter Using DHCP/BOOTP Utility
1. Verify and note the adapter’s hardware Ethernet Address (MAC), which
will be used in Step 6. There are two ways to do this:
• Use the PowerFlex 525 drive’s keypad or a HIM to access the diagnostic
parameters of the drive. Scroll to parameters F687 [HW Addr 1]
through F692 [HW Addr 6] to view the adapter’s hardware Ethernet
Address (MAC). Finally, convert these decimal values to a hex value.
• Remove the PowerFlex 525 control module front cover and locate the
adapter’s hardware Ethernet Address (MAC) label.
2. On a computer connected to the EtherNet/IP network, start the
BOOTP/DHCP software. The BOOTP/DHCP Server window
appears.
3. To properly configure devices on your EtherNet/IP network, you must
configure settings in the BOOTP/DHCP software to match the network.
Select To o l s > Network Settings to display the Network Settings window.
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 25
Page 26

Chapter 3 Configuring the Adapter
4. Edit the following:
Box Type
Subnet Mask
Gateway
Primary DNS The address of the primary DNS server to be used on the local end of the link for
Secondary DNS Optional – the address of the secondary DNS server to be used on the local end of the
Domain Name The text name corresponding to the numeric IP address that was assigned to the server
(1) For definitions of these terms, see the
(1)
(1)
The subnet mask for the adapter’s network.
The IP address of the gateway device on the adapter’s network.
negotiating with remote devices.
link for negotiating with remote devices when the primary DNS server is unavailable.
that controls the network.
Glossary.
5. Click OK to apply the settings. Devices on the network issuing BOOTP/
DHCP requests appear in the BOOTP/DHCP Request History list.
6. In the BOOTP/DHCP Request History list, either double-click the
adapter’s Ethernet Address (MAC) noted in Step 1, or click Ne w in the
Relation List. The New Entry window appears. In the first case, the
Ethernet Address (MAC) is automatically entered. In the latter case, you
must manually enter it.
7. Edit the following:
Box Type
(1)
IP Address
Host Name Optional
Description Optional
(1) For definitions of these terms, see the
A unique IP address for the adapter
Glossary.
8. Click OK to apply the settings. The adapter appears in the Relation List
with the new settings.
26 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 27

Configuring the Adapter Chapter 3
TIP
192.168.1.62
[EN IP Addr Cfg 1]
[EN IP Addr Cfg 2]
[EN IP Addr Cfg 3]
[EN IP Addr Cfg 4]
Default = 0.0.0.0
9. To assign this configuration to the adapter, select the device in the Relation
List and click Disable BOOTP/DHCP. When power is cycled on the
drive, the adapter will use the configuration you assigned it and not issue
new BOOTP/DHCP requests.
To enable BOOTP for an embedded adapter that has had BOOTP
disabled, first select the adapter in the Relation List. Then click Enable
BOOTP and power cycle the drive.
10. To save the Relation List, select File > Save.
Setting the IP Address,
Subnet Mask, and Gateway
Address
By default, the adapter is configured to accept an IP address, subnet mask, and
gateway address from a BOOTP server. If you want to set these attributes using
parameters instead, you must first disable BOOTP and then set these network
address parameters in the drive.
Disabling the BOOTP Feature
1. Set the value of parameter C128 [EN Addr Sel] to 1“Parameters”.
Options 1“Parameters”
2“BOOTP” (Default)
2. Reset the adapter by power cycling the drive.
After disabling the BOOTP feature, you can then configure the IP
address, subnet mask, and gateway address using parameters.
Setting an IP Address Using Parameters
1. Verify that parameter C128 [EN Addr Sel] is set to 1“Parameters”. This
parameter must be set to “Parameters” to configure the IP address using
parameters.
2. Set the value of parameters C129 [EN IP Addr Cfg 1] through C132
[EN IP Addr Cfg 4] to a unique IP address.
3. Reset the adapter by power cycling the drive.
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 27
Page 28

Chapter 3 Configuring the Adapter
Default = 0.0.0.0 255.255.255.0
[EN Subnet Cfg 1]
[EN Subnet Cfg 2]
[EN Subnet Cfg 3]
[EN Subnet Cfg 4]
Default = 0.0.0.0 192.168.1.1
[EN Gateway Cfg 1]
[EN Gateway Cfg 2]
[EN Gateway Cfg 3]
[EN Gateway Cfg 4]
Setting a Subnet Mask Using Parameters
1. Verify that parameter C128 [EN EN Addr Sel] is set to 1“Parameters”.
This parameter must be set to “Parameters” to configure the subnet mask
using parameters.
2. Set the value of parameters C133 [EN Subnet Cfg 1] through C136 [EN
Subnet Cfg 4] to the desired value for the subnet mask.
3. Reset the adapter by power cycling the drive.
Setting a Gateway Address Using Parameters
1. Verify that parameter C128 [EN EN Addr Sel] is set to 1“Parameters”.
This parameter must be set to “Parameters” to configure the gateway
address using parameters.
2. Set the value of parameters C137 [EN Gateway Cfg 1] through C140
[EN Gateway Cfg 4] to the desired value for the gateway address.
3. Reset the adapter by power cycling the drive.
Setting the Data Rate
By default, the adapter automatically detects the data (baud) rate and duplex
setting used on the network. If you need to set a specific data rate and duplex
setting, the value of parameter C141 [EN Rate Cfg] determines the Ethernet
data rate and duplex setting that the adapter will use to communicate. For
definitions of data rate and duplex, see the
1. Set the value of parameter C141 [EN Rate Cfg] to the data rate at which
your network is operating.
Options 0 “Auto detect” (Default)
1 “10Mbps Full”
2 “10Mbps Half”
28 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
3 “100Mbps Full”
4 “100Mbps Half”
Glossary
.
Page 29
TIP
Auto detection of data rate and duplex works properly only if the
IMPORTANT
TIP
device (usually a switch) on the other end of the cable is also set to
automatically detect the data rate/duplex. If one device has the data
rate/duplex hard-coded, the other device must be hard-coded to the
same settings.
2. Reset the adapter by power cycling the drive.
Configuring the Adapter Chapter 3
Using Master-Slave Hierarchy
A hierarchy determines the type of device with which the adapter exchanges data.
In a Master-Slave hierarchy, the adapter exchanges data with a master, such as a
scanner or bridge.
For a Master-Slave hierarchy, the devices exchanging data must be on the same IP
subnet. See “IP Addresses” in the
Glossary for information about IP subnets.
Configuring a Master-Slave Hierarchy
The controller I/O image can have anywhere from zero to eight (four In and four
Out) additional 16-bit parameters called Datalinks. They are configured using
parameters C153 [EN Data In 1] through C156 [EN Data In 4], and C157
[EN Data Out 1] through C160 [EN Data Out 4]. The number of Datalinks
actively used is controlled by the connection size in the controller and the in/out
parameters. See the respective controller example sections in
information on setting the connection size.
The [EN Data In x] and [EN Data Out x] parameters are named with respect to
the master (controller), not the drive. [EN Data In x] parameters are for data
incoming to the master (controller) from the drive, and [EN Data Out x]
parameters are for data outgoing from the master (controller) to the drive.
Chapter 4 for more
When using a ControlLogix or CompactLogix controller and the Generic
Profile, or a MicroLogix 1100/1400 controller, configure the Datalink
parameters now as described in this section.
When using a ControlLogix or CompactLogix controller and an RSLogix 5000
(version 17.0 or greater) or Logix Designer (version 21.0 or greater) drive AddOn Profile, there is no need to configure Datalink parameters at this time. They
will be assigned when configuring the drive Add-On Profile (see
Drive to the I/O Configuration on page 38).
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 29
Adding the
Page 30

Chapter 3 Configuring the Adapter
IMPORTANT
IMPORTANT
Enabling Datalinks To Write Data
Always use the Datalink parameters in consecutive numerical order, starting
with the first parameter. For example, use Parameters C157, C158, and C159 to
configure three Datalinks to write data. Otherwise, the network I/O connection
will be larger than necessary, which needlessly increases controller response
time and memory usage.
Parameters C157 [EN Data Out 1] through C160 [EN Data Out 4] control
which parameters in the drive, adapter, or any other connected peripheral receive
values from the network. To configure these parameters, set them to the drive
parameter number you want to write them to.
The following steps are required to enable Datalinks to write data:
1. Set the values of only the required number of contiguous controller-todrive Datalinks needed to write data to the drive and that are to be
included in the network I/O connection.
2. Reset the adapter by power cycling the drive.
After the above steps are complete, the adapter is ready to receive input data and
transfer status data to the master (controller). Next, configure the controller to
recognize and transmit I/O to the adapter. See
Chapter 4
, Configuring the I/O.
Enabling Datalinks To Read Data
Always use the Datalink parameters in consecutive numerical order, starting
with the first parameter. For example, use Parameters C153, C154, and C155 to
configure three Datalinks to read data. Otherwise, the network I/O connection
will be larger than necessary, which needlessly increases controller response
time and memory usage.
Parameters C153 [EN Data In 1] through C156 [EN Data In 4] configure
which parameters in the drive, adapter, or any other connected peripheral send
values to the network. To configure these parameters, set them to the parameter
number you wish to read over the network.
The following steps are required to enable Datalinks to read data:
1. Set the values of only the required number of contiguous drive-tocontroller Datalinks needed to read data from the drive and that are to be
included in the network I/O connection.
2. Reset the adapter by power cycling the drive.
After the above steps are complete, the adapter is ready to send output data to the
master (controller). Next, configure the controller to recognize and transmit I/O
to the adapter. See
30 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Chapter 4, Configuring the I/O.
Page 31

Configuring the Adapter Chapter 3
Setting a Fault Action
By default, when communications are disrupted (the network cable is
disconnected) and/or the controller is idle (in program mode or faulted), the
drive responds by faulting if it is using I/O from the network. You can configure a
different response to:
• Disrupted I/O communication by using parameter
C143 [EN Comm Flt Actn].
• An idle controller by using parameter C144 [EN Idle Flt Actn].
ATT EN TI ON : Risk of injur y or equipment damage exists. Drive parameters C143
[EN Comm Flt Actn] and C144 [EN Idle Flt Actn] respectively let you determine
the action of the embedded EtherNet/IP adapter and drive if communications
are disrupted or the controller is idle. By default, these parameters fault the
drive. You may configure these parameters so that the drive continues to run,
however, precautions should be taken to ensure that the settings of these
parameters do not create a risk of injury or equipment damage. When
commissioning the drive, verify that your system responds correctly to various
situations (a disconnected network cable or controller in idle state).
Changing the Fault Action
Set the values of parameters C143 [EN Comm Flt Actn] and C144 [EN Idle Flt
Actn] to the desired responses:
Value Action Description
0 Fault The drive is faulted and stopped (Default).
1 Stop The drive is stopped as per P045 [Stop Mode] setting.
2 Zero Data The Reference and Datalink values transmitted to the drive will be set to “0”.
3 Hold Last The Reference and Datalink values transmitted to the drive will be held at their last value.
4 Send Flt Cfg The Logic, Reference, and Datalink values will be transmitted to the drive as configured in
C145 [EN Flt Cfg Logic], C146 [EN Flt Cfg Ref], and C157 [EN Data Out 1] through C160 [EN Data
Out 4].
Changes to these parameters take effect immediately. A reset is not required. If
communication is disrupted and then re-established, the drive will automatically
receive commands over the network again.
Setting the Fault Configuration Parameters
When setting parameter C143 [EN Comm Flt Actn] and C144 [EN Idle Flt
Actn] to 4 “Send Flt Cfg,” the values in the following parameters are sent to the
drive after a communications fault and/or idle fault for drive control fault occurs.
You must set these parameters to values required by your application. Changes to
these parameters take effect immediately. A reset is not required.
Parameter Description
C145 [EN Flt Cfg Logic] A 16-bit value sent to the drive for Logic Command.
C146 [EN Flt Cfg Ref] A 16-bit REAL (floating point) value sent to the drive for Reference.
C157 [EN Data Out 1] through
C160 [EN Data Out 4]
A 16-bit integer value sent to the drive for a Datalink.
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 31
Page 32
Chapter 3 Configuring the Adapter
Resetting the Adapter
Viewing the Adapter Status
Using Parameters
Changes to some parameters require that you reset the adapter before the new
settings take effect. You can reset the adapter by cycling power to the drive.
ATT EN TI ON : Risk of injury or equipment damage exists. If the adapter is
transmitting control I/O to the drive, the drive may fault when you reset the
adapter. Determine how your drive will respond before resetting the adapter.
The following diagnostic parameters provide information about the status of the
adapter. You can view these parameters at any time.
Embedded EtherNet/IP Adapter Diagnostic Parameters
Name Description
F681 [Comm Sts - DSI] Displays the status of the RS485 serial (DSI) port to the drive.
F682 [Comm Sts - Opt] Displays the status of the internal communication to the drive.
F683 [Com Sts-Emb Enet] Displays the status of the embedded EtherNet/IP interface to the drive.
F684 [EN Addr Src] Displays the network configuration source currently used by the embedded
F685 [EN Rate Act] Displays the network data rate currently used by the embedded EtherNet/IP
F686 [DSI I/O Act] Displays the drives that are active in Multi-drive mode.
F687 [HW Addr 1] through
F692 [HW Addr 6]
F693 [EN IP Addr Act 1] through
F696 [EN IP Addr Act 4]
F697 [EN Subnet Act 1] through
F700 [EN Subnet Act 4]
F701 [EN Gateway Act 1] through
F704 [EN Gateway Act 4]
F705 [Drive 0 Logic Cmd]
F709 [Drive 1 Logic Cmd]
F713 [Drive 2 Logic Cmd]
F717 [Drive 3 Logic Cmd]
F721 [Drive 4 Logic Cmd]
F706 [Drv 0 Reference]
F710 [Drv 1 Reference]
F714 [Drv 2 Reference]
F718 [Drv 3 Reference]
F722 [Drv 4 Reference]
F707 [Drv 0 Logic Sts]
F711 [Drv 1 Logic Sts]
F715 [Drv 2 Logic Sts]
F719 [Drv 3 Logic Sts]
F723 [Drv 4 Logic Sts]
F708 [Drv 0 Feedback]
F712 [Drv 1 Feedback]
F716 [Drv 2 Feedback]
F720 [Drv 3 Feedback]
F724 [Drv 4 Feedback]
F725 [EN Rx Overruns] A count of the number of receive overrun errors reported by the embedded
F726 [EN Rx Packets] A count of the number of receive packets reported by the embedded EtherNet/IP
F727 [EN Rx Errors] A count of the number of receive errors reported by the embedded EtherNet/IP
EtherNet/IP interface.
interface.
Decimal value of each byte in the adapter’s Ethernet hardware address.
Value of each byte in the adapter’s present IP address. A value of “0” appears if the
adapter does not currently have an IP address.
Value of each byte in the adapter’s present subnet mask. A value of “0” appears if
the adapter does not currently have a subnet mask.
Value of each byte in the adapter’s present gateway address. A value of “0” appears
if the adapter does not currently have a gateway address.
In Multi-drive mode, this is the logic command being transmitted to drive 0.
In Single-drive mode, this is the logic command being used by the drive (whether
HS-DSI, EtherNet/IP, or DSI) at the time. If comms control is NOT being used, and
the drive is in single-drive mode, then this parameter will show 0.
In Multi-drive mode, this is the reference being transmitted to drive 0/1/2/3/4.
In Single-drive mode, this is the reference being used by the drive (whether HS-
DSI, EtherNet/IP, or DSI) at the time. If comms control is NOT being used, and the
drive is in single-drive mode, then this parameter will show 0.
In Multi-drive mode, this is the logic status being received from drive 0/1/2/3/4.
In Single-drive mode, this is the logic status of the drive at the time.
In Multi-drive mode, this is the feedback being received from drive 0/1/2/3/4.
In Single-drive mode, this is the feedback of the drive at the time.
EtherNet/IP interface.
interface.
interface.
32 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 33

Configuring the Adapter Chapter 3
Embedded EtherNet/IP Adapter Diagnostic Parameters
Name Description
F728 [EN Tx Packets] A count of the number of transmitted packets reported by the embedded EtherNet/
F729 [EN Tx Errors] A count of the number of transmit errors reported by the embedded EtherNet/IP
F730 [EN Missed IO Pkt] The number of I/O packets missed.
F731 [DSI Errors] The number of total DSI errors.
IP interface.
interface.
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 33
Page 34

Chapter 3 Configuring the Adapter
Notes:
34 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 35

Chapter 4
Configuring the I/O
This chapter provides instructions on how to configure a CompactLogix
controller to communicate with the embedded EtherNet/IP adapter in the
PowerFlex 525 drive.
Top ic Pag e
Using RSLinx Classic
CompactLogix Example 36
Limitations in Using MicroLogix 1100/1400 58
35
Using RSLinx Classic
RSLinx Classic, in all its variations (Lite, Gateway, OEM, etc.), is used to provide
a communication link between the computer, network, and controller. RSLinx
Classic requires its network-specific driver to be configured before
communications are established with network devices. To configure the RSLinx
driver:
1. Start RSLinx and select Communications > Configure Drivers to display
the Configure Drivers window.
2. From the Available Driver Types pull-down box, choose “EtherNet/IP
Driver” and then click Add New… to display the Add New RSLinx Driver
window.
3. Use the default name or type a name and click OK. The “Configure
driver:” window appears.
4. Depending on your application, select either the browse local or remote
subnet option, and click OK. The Configure Drivers window reappears
with the new driver in the Configured Drivers list.
5. Click Close to close the Configure Drivers window. Keep RSLinx
running.
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 35
Page 36

Chapter 4 Configuring the I/O
Esc
Sel
Ethernet
switch
IP Address 192.168.1.3
1769-L36ERM CompactLogix controller
with embedded EtherNet/IP bridge
IP Address 192.168.1.4
PowerFlex 525 drive with embedded
EtherNet/IP adapter (Frame A shown)
Computer with
Ethernet connection
6. Verify that your computer recognizes the drive. Select Communications >
RSWho and, in the menu tree, click the “+” symbol next to the Ethernet
driver.
7. Note that two other RSLinx drivers (Ethernet devices or Remote Devices
through Linx Gateway) may be used. Use one of these drivers if the
“EtherNet/IP Driver” cannot see your drive.
CompactLogix Example
After the adapter is configured, the drive and adapter will be a single node on the
network. This section provides the steps needed to configure a simple EtherNet/
IP network. In our example, we will configure a 1769-L36ERM CompactLogix
controller with embedded EtherNet/IP capability to communicate with a drive
using Logic Command/Status, Reference/Feedback, and eight Datalinks (four to
read and four to write) over the network.
00:00:BC:2E:69:F6
1 (Front)1 (Front)1 (Front)
2 (Rear)
Adding the Controller to the I/O Configuration
To establish communications between the controller and drive over the network,
you must first add the CompactLogix controller and its embedded EtherNet/IP
bridge to the I/O configuration.
36 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 37

Configuring the I/O Chapter 4
1. Start RSLogix 5000/Logix Designer. The application window appears.
Select File > Ne w to display the New Controller window.
Select the appropriate choices for the fields in the window to match your
application. Then click OK. The application window reappears with the
treeview in the left pane.
Note : If you are using a controller without an embedded EtherNet/IP
bridge, you will also need to add the bridge to the I/O configuration. See
the user manual for your controller for details.
2. Configure the IP address/Network Settings on your controller or bridge.
In this example, the Network Settings are set for a private network.
3. Click OK. The controller is now configured for the EtherNet/IP network.
It appears in the I/O Configuration folder. In our example, a
1769-L36ERM controller appears under the I/O Configuration folder
with its assigned name.
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 37
Page 38

Chapter 4 Configuring the I/O
There are two ways to add the embedded EtherNet/IP adapter into the I/O
configuration:
• Drive Add-On Profiles (RSLogix 5000 version 17.0 or greater, Logix
Designer version 21.0 or greater)
• Generic Profile (RSLogix 5000 or Logix Designer, all versions)
These are described in the following separate sections. If your version of
RSLogix 5000/Logix Designer supports drive Add-On Profiles, we highly
recommend using this method.
Using Drive Add-On Profiles with RSLogix 5000 (version 17.0 or
greater) or Logix Designer (version 21.0 or greater)
When compared to using the Generic Profile (all versions), the drive Add-On
Profiles provide these advantages:
• Profiles for specific drives that provide descriptive controller tags for basic
control I/O words (Logic Command/Status and Reference/Feedback)
and Datalinks. Additionally, Datalinks automatically take the name of the
drive parameter to which they are assigned. These profiles virtually
eliminate I/O mismatch errors and substantially reduce drive
configuration time.
• New Drive tab eliminates the need for a separate drive software
configuration tool.
• Drive configuration settings are saved as part of the RSLogix 5000/
Logix Designer project file (.ACD) and also downloaded to the controller.
• Unicast connection (RSLogix 5000 version 18.0 or greater, or Logix
Designer version 21.0 or greater)
• Drive Add-On Profiles enable I/O to be added online while the controller
is in the Run mode.
• Drive Add-On Profiles can be updated anytime. When a new drive is used
or to benefit from new updates for Add-On Profiles, you will need the
newest Add-On Profile update. Go to
webupdate to download the latest RSLogix 5000/Logix Designer drive
Add-On Profile.
www.ab.com/support/abdrives/
Adding the Drive to the I/O Configuration
To transmit data between the controller and the drive, you must add the drive as a
child device to the parent controller. In this example, RSLogix 5000 version 20.0
is used with drive Add-On Profile version 1.01 or later.
38 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 39

Configuring the I/O Chapter 4
TIP
1. In the treeview, right-click on the icon and select New
Module… to display the Select Module window. Expand the Drives group
to display all of the available drives with their communication adapters.
If the PowerFlex drive is not shown, go to www.ab.com/support/
abdrives/webupdate and download the latest drive Add-On Profile.
2. In the Select Module Type window, select the drive and its connected
adapter from the list. For this example, we selected “PowerFlex 525EENET.” Then click Create. The drive’s New Module window appears.
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 39
Page 40

Chapter 4 Configuring the I/O
3. On the General tab, edit the following data about the drive:
Box Setting
Name A name to identify the drive.
Description Optional – description of the drive.
IP Address The IP address of the adapter.
4. On the New Module window in the Module Definition section, click
Change… to launch the Module Definition window and begin the drive
configuration process.
40 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 41

Configuring the I/O Chapter 4
TIP
5. In the Module Definition window, edit the following information:
You may create a database from a network accessible drive using the
Create Database... button (Recommended).
Box Setting
Drive Rating The voltage and current rating of the drive. If the drive rating is not listed, the drive
Revision The major and minor revision of the firmware (database) in the drive. If the drive’s major
Electronic Keying Compatible Module. The “Compatible Module” setting for Elec tronic Keying ensures the
Input Data Assigns drive or connected peripheral parameters to be READ by the controlle r using
Output Data Assigns drive or connected peripheral parameters to be WRITTEN by the controller using
Mode Select Sets the I/O configuration to either Velocity or Position mode.
database is not installed on your computer. To get the drive rating, use the Create
Database…, or Web Update… button described above.
and minor revision is not available, the drive database is not installed on your computer. To
get the correct database revision, use one of the following buttons at the bottom left of the
Module Definition window:
•Create Database… Creates a database from an online network drive. Clicking this
button displays an RSLinx RSWho window. Browse to the online drive (PowerFlex 525),
select it, and click OK. The database will be uploaded and stored on the computer.
Thereafter, close the Module Definition window and then re-open it to display the new
revisio n.
• Web Update… When a drive is not available online, opens the Allen-Bradley Drives
Web Updates web site to download a specific database file. After downloading the file,
close the Module Definition window and then re-open it to display the new revision.
physical module is consistent with the software configuration before the controller and
bridge make a connection. Therefore, ensure that you have set the correct revision in this
window. See the online Help for additional information on this and other Electronic Keying
settings. If keying is not required, select “Disable Keying.” Drives do not require keying, and
so “Disable Keying” is recommended.
When using RSLogix 5000 (version 20.0) or Logix Designer (version 21.0 or greater) and
Automatic Device Configuration (ADC) with Firmware Supervisor flash support to store
firmware for the drive, always choose “Exact Match.” See the table on
details when using ADC.
Datalinks.
Datalinks.
page 49
for full
On the Module Definition window, notice that the automatically-assigned
controller tags Drive Status, Feedback, Logic Command, and Reference
are always used.
When using Datalinks you must still assign parameters C153 [EN Data In
1] through C156 [EN Data In 4] and C157 [EN Data Out 1] through
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 41
Page 42

Chapter 4 Configuring the I/O
IMPORTANT
C160 [EN Data Out 4] to point to the appropriate drive or connected
peripheral parameters. The procedure to configure the Datalinks on the
Module Definition window for the Input Data and Output Data is the
same:
• Click the button to assign a parameter to each input and output
Datalink you require.
Always use the Datalink parameters in consecutive numerical order,
starting with the first parameter. (For example, use parameters C157,
C158, and C159 to configure three Datalinks to write data and/or
parameters C153, C154, C155, and C156 to configure four Datalinks to
read data.) Otherwise, the network I/O connection will be larger than
necessary, which needlessly increases controller response time and
memory usage.
6. Click OK on the Module Definition window to save the drive
configuration and close the window. The drive’s New Module window
reappears.
7. On the New Module window, click the Connection tab.
8. In the “Requested Packet Interval (RPI)” box, set the value to 5.0
milliseconds or greater. This value determines the maximum interval that a
controller should use to move data to and from the adapter. To conserve
bandwidth, use higher values for communicating with low priority devices.
The “Inhibit Module” box, when checked, inhibits the module from
communicating with the RSLogix 5000/Logix Designer project. When
the “Major Fault on …” box is checked, a major controller fault will occur
when the module’s connection fails while the controller is in the Run
Mode. For this example, leave the “Inhibit Module” and “Major Fault On
…” boxes unchecked.
42 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 43

Configuring the I/O Chapter 4
9. Click OK on the New Module window.
The new node (“PowerFlex 525-EENET PowerFlex_52X_Drive” in this
example) now appears under the icon in the I/O Configuration
folder. If you double-click on the Input Controller Tag (
Controller Input
Ta g s on page 43) and Output Controller Tag (Controller Output Tags on
page 43), you will see that module-defined data types and tags have been
automatically created. Note that all tag names are defined and Datalinks
include the assigned drive parameter name. After you save and download
the configuration, these tags allow you to access the Input and Output data
of the drive using the controller’s ladder logic.
Controller Input Tags
Controller Output Tags
Saving the I/O Configuration to the Controller
After adding the controller and drive to the I/O configuration, you must
download the configuration to the controller. You should also save the
configuration to a file on your computer.
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 43
Page 44
Chapter 4 Configuring the I/O
TIP
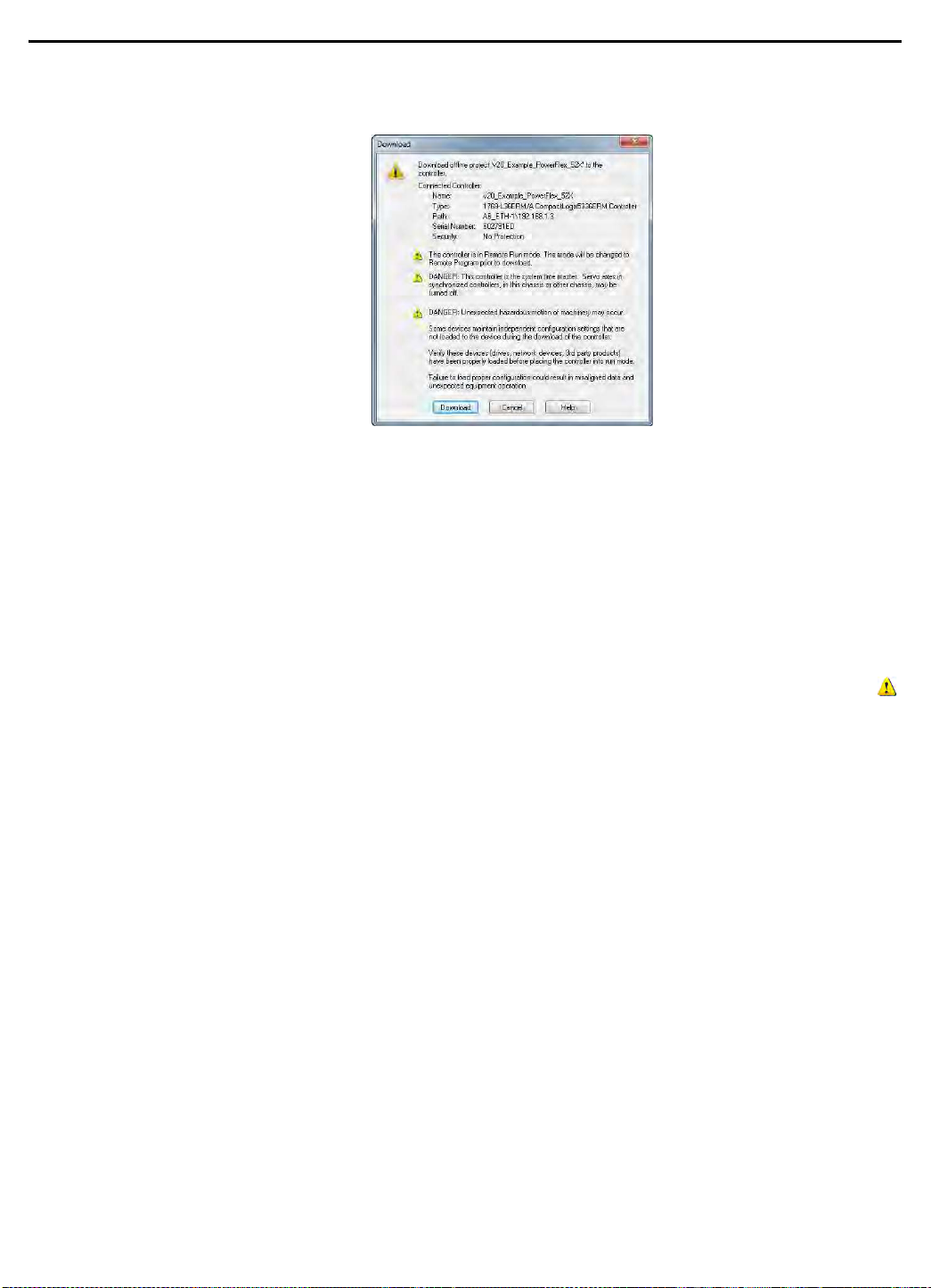
1. In the RSLogix 5000/Logix Designer window, select Communications >
Download. The Download dialog box appears.
If a message box reports that RSLogix 5000/Logix Designer is unable to
go online, select Communications > Who Active to find your
controller in the Who Active screen. After finding and selecting the
controller, click Set Project Path to establish the path. If your
controller does not appear, you need to add or configure the EtherNet/
IP driver in RSLinx. See the RSLinx online help.
2. Click Download to download the configuration to the controller. When
the download is successfully completed, RSLogix 5000/Logix Designer
goes into Online Mode and the I/O Not Responding box in the upper-left
of the window should be flashing green. Also, a yellow warning symbol
should be displayed on the I/O Configuration folder in the treeview and
on the drive profile.
3. If the controller was in Run Mode before clicking Download,
RSLogix 5000/Logix Designer prompts you to change the controller
mode back to Remote Run. In this case, choose the appropriate mode for
your application. If the controller was in Program Mode before clicking
Download, this prompt will not appear.
4. Select File > Save. If this is the first time you saved the project, the Save As
dialog box appears. Navigate to a folder, type a file name, and click Save to
save the configuration to a file on your computer.
5. To ensure that the present project configuration values are saved,
RSLogix 5000/Logix Designer prompts you to upload them. Click Ye s to
upload and save them.
Correlating the Drive with the Controller
You must now correlate the drive settings to the RSLogix 5000/Logix Designer
project I/O settings so that they match. This requires loading the project I/O
settings into the drive.
44 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 45

Configuring the I/O Chapter 4
TIP
1. In the treeview under I/O Configuration, right-click on the drive profile
(for this example “PowerFlex 525-EENET PowerFlex_52X_Drive”) and
select Properties.
2. Select the Drive tab to begin the correlation process.
After the drive configuration data has been verified, the Drive tab will
display a request to synchronize the configuration with the drive. Click
Accept.
Differences Found Screen on page 46 appears—which is typical,
If the
click Download. This will download the project settings from the
controller to the drive. If Up loa d is clicked, the drive settings are uploaded
to the controller.
On subsequent connections to the drive (after the initial download),
select Upload.
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 45
Page 46

Chapter 4 Configuring the I/O
Differences Found Screen
3. The Drive tab displays a screen of the drive.
If the download is successful, the Drive tab will show a green
indicator in the upper right corner of the window. This tab is extremely
useful for configuring drive parameters, accessing start-up wizards and
troubleshooting.
4. Click OK to close the Module Properties window for the drive.
Using Automatic Device Configuration (ADC) with RSLogix 5000
(version 20.0) or Logix Designer (version 21.0 or greater)
Automatic Device Configuration (ADC) is an RSLogix 5000 (version 20.0) and
Logix Designer (version 21.0 or greater) feature that supports the automatic
download of configuration data upon the Logix controller establishing an
EtherNet/IP network connection to a PowerFlex 525 drive and its associated
peripherals.
46 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 47

Configuring the I/O Chapter 4
IMPORTANT
TIP
IMPORTANT
• ADC is not available for DSI peripherals.
• ADC is not available in Multi-drive mode.
• ADC is only available when the drive is connected using the embedded
EtherNet/IP adapter or future EtherNet/IP DLR adapter to a compatible
controller.
An RSLogix 5000 (version 20.0) or Logix Designer (version 21.0 or greater)
project (.ACD file) contains the configuration settings for any PowerFlex drives
in the project. When the project is downloaded to the Logix controller, these
settings are also transferred and reside in the controller’s memory. Prior to ADC
in RSLogix 5000 (version 20.0) or Logix Designer (version 21.0 or greater),
downloading PowerFlex 525 configuration data was a manual process where the
user would open the Drive tab in the respective drive Add-On Profile (AOP) in
the application and click on the Download icon. ADC now automates the
process and saves the user time. It is particularly beneficial in a drive replacement
situation when a production line is down.
Use with Stratix switches (Stratix 5700) to provide dynamic IP address
assignment by port. This eliminates the need for the user to manually enter
the IP address, Subnet mask, and Gateway address prior to connecting a
replacement drive to the Ethernet network.
ADC can also work in tandem with Firmware Super visor. If Firmware Supervisor
is set up and enabled for a drive (“Exact Match” keying must be used), the drive/
peripheral will be automatically flashed (if necessary) prior to any ADC
operation for that port.
Logix “owns” the configuration of the drive. ADC will be triggered any
time the Logix controller detects a configuration signature mismatch
when establishing an EtherNet/IP network I/O connection. The use of
other configuration tools, such as a HIM or Connected Components Workbench
software should be minimized and restricted to monitor-only operation. Any
configuration changes made by these tools will cause a configuration signature
mismatch the next time the Logix controller connects to the device and ADC
will write over any changes made by the other tool(s). Any drive configuration
changes should be made with the drive Add-On Profile.
The drive AOP requires user action to enable ADC. This helps ensure that the
user understands ADC operation prior to turning it on. The drive AOPs also
have an ADC icon on the Drive tab to show general ADC enable/disable status
for the drive:
Icon Meaning
No ports on the drive have ADC enabled.
At least one port on the drive has ADC enabled.
ADC is not supported.
Clicking on the ADC icon will launch the ADC configuration window. This
provides a single, convenient location to enable/disable ADC on the drive.
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 47
Page 48

Chapter 4 Configuring the I/O
Configuring a PowerFlex 525 Drive for ADC
ADC is configured within the AOP of the PowerFlex 525 drive. Start by creating
or opening a PowerFlex 525 drive in the RSLogix 5000/Logix Designer I/O
Configuration folder.
1. In the Module Properties window, select the General tab and click
Change… to open the Module Definition window.
2. Select the appropriate Electronic Keying for your application.
48 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 49

Configuring the I/O Chapter 4
TIP
There are three Electronic Keying choices available in the Module
Definition window in the drive AOP, but only two are recommended with
ADC:
Keying Selection Recommendation
Exact Match This selection should only be used if:
Compatible Module This selection is the typical ADC selection when Firmware Supervisor is not used. A replacement
Disabled When using ADC, this selection should generally not be used. This selection allows a replacement
• Your system design specification requires that a replacement drive/peripheral be identical –
down to the Minor revision of firmware (x.xxx).
• You will be implementing Firmware Super visor flash support in addition to ADC. ControlFlash
firmware kits for the revision of firmware used for each drive/peripheral must be installed on the
PC running RSLogix 5000/Logix Designer. Flash files can be downloaded from:
http://www.ab.com/support/abdrives/webupdate
drive (including peripherals) will need to have the same or hi gher firmware re vision as the original.
Since drives with newer firmware are required to be compatible with older firmware, this allows
ADC to work without compatibility concerns. Note that if a Series change accompanies a Major
firmware change, the replacement drive may or may not be “compatible” with respect to keying.
drive to have any different Major ( x.xxx) and/or Minor (x.xxx) firmware revision. It is up to the user
to provide a replacement that has a firmware revision later than or equal to the original drive. If a
replacement drive with older firmware is used, the ADC download may fail.
Electronic Keying for HIMs and serial converters are disabled by default.
These are typically temporary devices or used for monitoring purposes
only and therefore “do not matter” if they are present or not. You still have
the option to select these to other Keying selections if desired.
Electronic Keying settings for peripherals can be modified in the Drive
tab of the AOP. Select the peripheral tab for the device you wish to
modify, then click Properties.
Click OK when finished.
3. Select the Drive tab and click the ADC icon to open the ADC
Settings.
The ADC Settings window provides a single location for ADC
configuration of the drive’s ports. Global checkboxes at the top of each
column checks or unchecks the entire column. Ports can also be turned
on/off individually. See the checkbox selection information in Step 3 for
additional details.
Click OK when finished.
4. Perform the above steps for each additional PowerFlex 525 drive.
5. Save your project and download the project to the Logix controller.
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 49
Page 50

Chapter 4 Configuring the I/O
ADC and Logix Memory
Starting in RSLogix 5000 version 16.0, drive configuration settings have been
stored in the project's ACD file which is downloaded and stored in the controller.
The majority of Logix controllers have megabytes of memory available, so this
typically should not be an issue. You can monitor Logix memory usage in the
application in the Controller Properties > Memory tab.
Storing the Drive’s and Peripheral’s Firmware in the Logix Controller (Firmware Supervisor)
The Logix Firmware Supervisor function has been extended to provide firmware
updates for the peripherals connected to the drive. To configure the controller to
check and refresh the correct firmware for the drive and peripherals, perform the
following steps:
1. Verify that “Exact Match” keying is selected in the drive’s and peripherals’
properties screens (the drive’s is in the General tab; the peripherals’ are
under the Drive tab, after right-clicking on each peripheral and choosing
Proper ties).
2. Verify that ControlFlash firmware kits for each revision of firmware for
each device that should be stored in the controller have been installed on
the PC running RSLogix 5000/Logix Designer.
3. Verify that a CompactFlash or other storage card has been installed in the
controller.
4. Use RSLogix 5000/Logix Designer to go online with the controller in
Program mode. Download your program if you have not done so already.
5. In the treeview, right-click on the controller folder at the top of the
Controller Organizer and choose Prop erties. On the Controller
Properties window, select the Nonvolatile Memory tab.
50 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 51

Configuring the I/O Chapter 4
IMPORTANT
6. Click Load/Store…. The Nonvolatile Memory Load/Store window
appears.
In the Controller section for the Automatic Firmware Update field, select
“Enable and Store Files to Image,” and click the <-- Store button. You may
see two different continue confirmation dialog boxes relating to
communication disruptions and erasure of the current contents of the
storage card. If okay, click Ye s on each dialog box.
7. The application will go to the Offline state, and the following dialog box
will appear.
Wait a short period of time for the store operation to complete, and then
attempt to go online with the controller again.
Monitoring the ADC Progress
The time it takes for the ADC process to complete will vary from seconds to
several minutes depending on several factors:
• The number of peripherals enabled for ADC.
• If a configuration signature for the drive/peripheral indicates a
configuration download needs to be performed for the given port.
• Whether Firmware Supervisor is enabled and needs to flash the drive and/
or any peripherals.
ADC can automatically reset the drive as part of the configuration process. This
is done because some parameters require a reset before they take effect. If a
drive is being replaced with an out-of-the-box drive, you will typically see one
or more resets during the ADC process.
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 51
Page 52

Chapter 4 Configuring the I/O
An operational drive in a running Logix system will have the following LED
states:
Drive LED State Description
ENET Off Adapter is not connected to the network.
Steady Adapter is connected to the network and drive is controlled through Ethernet.
Flashing Adapter is connected to the network but drive is not controlled through Ethernet.
LINK Off Adapter is not connected to the network.
Steady Adapter is conn ected to the network but not transmitting data.
Flashing Adapter is connected to the network and transmitting data.
FAULT Flashing Red Indicates drive is faulted
Understanding the Status Indicators
See
on page 109 for more information.
Additional information may also be displayed on the HIM if it is present (flash
status, etc.).
If ADC is unsuccessful, RSLogix 5000/Logix Designer can be used to get
additional information. When online, the drive at issue should have a yellow
triangle next to it in the RSLogix 5000/Logix Designer project's I/O
Configuration folder. Double-click on the drive to open the drive AOP. The
Connection tab will show a Module Fault code and the Drive tab can help you
identify issues.
ADC Status Field Description
Running Any desired configuration is complete, and the I/O connection is running.
Configuring ADC is currently updating the configuration of the drive or one of its peripherals. Clicking
Firmware Updating ADC is currently updating the firmware of the drive or one of its peripherals. Clicking on
Inhibited The program has the connection inhibited. You can uninhibit the connection on the
Faulted A problem is preventing the controller from connecting to the drive (for example, the
on the Connection tab will show which device is being updated.
the Drive tab will show which device is being updated.
Connection tab.
device at the IP address provided is not a PowerFlex 525 drive). Clicking on the
Connection tab will show the cause (Module Fault). Clicking on the D rive tab may also
show the faulted ports.
Examples of potential issues/solutions are:
Issue Solution
“Compatible module” keying selected, but replacement
drive or peripheral has an earlier firmware revision than the
failed device.
Peripheral is required for connec tion (“Fail Drive Connection
on Peripheral Error” was checked), but it is missing.
Parameter “out of range” error—ADC wrote a value to a
parameter that was out of range (typically would only
occur during initial commissioning of a drive system).
52 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Replace device with a revision that is later than or equal to
the failed device. If necessar y, use ControlFLASH to fla sh
replacement device first to an acceptable revision level.
Add required peripheral or remove peripheral from
RSLogix 5000/Logix Designer project for the drive and
download project to the controller.
Use any available drive software tool to view a linear list of
changed parameters to see if the configured value is
outside the minimum/maximum value. The drive AOPs are
the preferred tool and will highlight any out of range
parameter in the Linear List editor. Connected Components
Workbench (version 3.0 or later) may also be used.
Page 53

Configuring the I/O Chapter 4
Using the RSLogix 5000 (version 17.0 or greater) or Logix Designer
(version 21.0 or greater) Generic Profile
The basic RSLogix 5000/Logix Designer Generic Profile is only recommended
when:
• A specific drive profile in other versions of RSLogix 5000/Logix Designer
is unavailable.
• Users are already familiar with a Generic Profile and do not want to
convert an existing project to a drive Add-On Profile (RSLogix 5000
version 17.0 or greater and Logix Designer version 21.0 or greater).
• A project must maintain specific revision level control.
• The controller cannot be taken offline. RSLogix 5000 (version 17.0 or
greater) and Logix Designer (version 21.0 or greater) enables the drive
Generic Profile to be added while the controller is online and in the Run
mode.
Adding the Drive to the I/O Configuration
To transmit data between the bridge and the drive, you must add the drive as a
child device to the parent bridge.
1. In the treeview, right-click on the icon and select New
Module… to display the Select Module Type window. Expand the
Communications group to display all of the available communication
modules or search for “ETHERNET-MODULE”.
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 53
Page 54

Chapter 4 Configuring the I/O
2. Select “ETHERNET-MODULE” from the list in the Select Module Type
window to configure the drive’s embedded EtherNet/IP adapter, and then
click Create. The drive’s New Module window appears.
3. Edit the following information about the drive:
Box Setting
Name A name to identify the drive.
Description Optional – description of the drive.
Comm Format Data – INT (This setting formats the data in 16-bit words.)
IP Address The IP address of the drive.
Open Module
Properties
When this box is checked, clicking OK opens additional module properties screens to
further configure the drive. When unchecked, clicking OK closes the drive’s New
Module screen. For this example, check this box.
4. Under Connection Parameters, edit the following:
Box Assembly Instance Size
Input 1 (This value is required.) The value will vary based on the total number of [ EN Data
Output 2 (This value is required.) The value will vary based on the total number of [EN Data
Confi guration 6 (This value is required.) 0 (This value is required.)
Out x] parameters used for your application, either in
Single-drive mode (see details below) or Multi-drive mode
(see
Out x] parameters used for your application, either in
Single-drive mode (see details below) or Multi-drive mode
(see
Enter the number of 16-bit words that are required for your I/O in the
Input Size and Output Size boxes. Since the adapter always uses the 16-bit
54 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Using Multi-Drive Mode
Using Multi-Drive Mode
on page 81).
on page 81).
Page 55

Configuring the I/O Chapter 4
IMPORTANT
Adapter
Word and I/O
Logic CommandWord 0
ReferenceWord 1
Datalink 1Word 2
Datalink 2Word 3
Datalink 3Word 4
Datalink 4Word 5
Logic StatusWord 2
FeedbackWord 3
Required
Padword
(1)
Word 0
PadwordWord 1
Datalink 1Word 4
Datalink 2Word 5
Datalink 3Word 6
Datalink 4Word 7
Optional
Required
Optional
Output
Image
(Write)
Input
Image
(Read)
(1) Padwords only apply when using the generic profile. Padwords are not used when using the full-featured drive Add-
On-Profile.
Logic Status, 16-bit Feedback, and two 16-bit words dedicated for
memory allocation of the Generic Ethernet module profile, at least four
16-bit words must be set for the Input Size. The adapter also uses the 16bit Logic Command and 16-bit Reference, requiring at least two 16-bit
words for the Output Size. If any or all of the drive’s eight 16-bit Datalinks
are used (see
Configuring a Master-Slave Hierarchy on page 29), the Input
and Output Size settings must be increased accordingly.
Generic Profile Example of I/O Image
For the example below, all four [EN Data Out x] and all four [EN Data In
x] parameters are used, resulting in an Input Size of “8” and an Output Size
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 55
of “6.”
5. After setting the information in the drive’s New Module window, click
OK. The Module Properties window appears.
The Datalink parameters [EN Data Out x] and [EN Data In x] do not
actually contain data. These are user-configurable parameters that
only contain the parameter number of the parameter whose data will
be made available for write/read in the I/O image. See
Using Datalinks
on page 61.
Page 56

Chapter 4 Configuring the I/O
6. Click the Connection tab.
7. In the “Requested Packet Interval (RPI)” box, set the value to 5.0
milliseconds or greater. This value determines the maximum interval that a
controller should use to move data to and from the adapter. To conserve
bandwidth, use higher values for communicating with low priority devices.
For this example, leave the “Inhibit Module” and Major Fault …” boxes
unchecked.
8. Click OK. The new node
(“ETHERNET-MODULE_PowerFlex_52X_Drive” in this example)
now appears under the icon in the I/O Configuration folder. If
you double-click on the Input Controller Tag (
Input Image Controller
Ta g s on page 56) and Output Controller Tag (Output Image Controller
Ta g s on page 56), you will see that module-defined data types and tags
have been automatically created. After you save and download the
configuration, these tags allow you to access the Input and Output data of
the drive using the controller’s ladder logic.
Input Image Controller Tags
Output Image Controller Tags
56 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 57

Configuring the I/O Chapter 4
TIP
TIP
Saving the I/O Configuration to the Controller
After adding the bridge and drive to the I/O configuration, you must download
the configuration to the controller. You should also save the configuration to a
file on your computer.
When using RSLogix 5000/Logix Designer, you can add the I/O configuration of
a Generic Profile while the controller is online and in the Run mode.
1. In the RSLogix 5000/Logix Designer window, select Communications >
Download. The Download dialog box appears.
If a message box reports that RSLogix 5000/Logix Designer is unable to
go online, select Communications > Who Active to find your
controller in the Who Active screen. After finding and selecting the
controller, click Set Project Path to establish the path. If your
controller does not appear, you need to add or configure the EtherNet/
IP driver in RSLinx. See
Using RSLinx Classic
on page 35 for details.
2. Click Download to download the configuration to the controller. When
the download is successfully completed, RSLogix 5000/Logix Designer
goes into the Online mode and the I/O OK box in the upper-left of the
screen should be steady green.
3. Select File > Save. If this is the first time you saved the project, the Save As
dialog box appears. Navigate to a folder, type a file name, and click Save to
save the configuration to a file on your computer.
4. Any Datalinks that were enabled in the controller and drive during I/O
configuration must also be configured in the drive. Each Datalink being
used must be assigned to a specific parameter in the drive or connected
peripheral (see
Configuring a Master-Slave Hierarchy
on page 29). If this is
not done, the controller will receive or send placeholder data instead of
actual drive or peripheral parameter values.
5. Place the controller in Remote Run or Run Mode.
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 57
Page 58

Chapter 4 Configuring the I/O
Limitations in Using
MicroLogix 1100/1400
Controlling I/O with explicit messages is relatively complex compared to normal
implicit I/O control.
ControlLogix and CompactLogix controllers with EtherNet/IP provide the
easiest and most integrated form of implicit I/O control for a PowerFlex drive.
RSLogix 5000/Logix Designer programming software for ControlLogix and
CompactLogix controllers contains integrated profiles for PowerFlex drives that,
with a few clicks of the mouse, automatically create all controller tags and an
implicit connection at the specified Requested Packet Interval to control the
drive. This connection is monitored at both ends to ensure that the controller
and drive are communicating. A watchdog will cause a drive fault if the drive does
not respond within approximately 100 milliseconds. Therefore, using a
ControlLogix or CompactLogix controller is by far the much preferred method
of controlling drives on EtherNet/IP.
If you are not using either of these type of controllers, then PowerFlex drives on
EtherNet/IP can be controlled with explicit messages using
MicroLogix 1100/1400 controllers with the following limitations:
• An explicit message is a much slower form of control and is nondeterministic. This means that you cannot guarantee how long the drive
will take to start up or stop when the command is given. Therefore, all
equipment used in this manner should be subject to a risk assessment,
taking into account the mechanical and electrical implementation.
• A timeout value (in seconds) in the embedded EtherNet/IP adapter will
issue a drive fault if a message is not received from the controller within the
specified time. However, the controller has no way of detecting a loss of
communications to the drive until the next cycle of explicit messages. This
is another factor in the risk assessment.
• Any additional drives to be controlled will require additional explicit
messages for their control, and they need to be carefully sequenced. Most
controllers have small communication queues (see its User Manual), which
need to be carefully managed if messages are not to be lost.
• Each controller has a limited number of communication connections (see
its User Manual for maximum connections), which will limit the number
of drives that can be connected.
In summary, unlike a ControlLogix or CompactLogix controller, programming a
MicroLogix 1100/1400 controller using RSLogix 500 software with explicit
messages is more difficult, and produces a more complex program.
58 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 59

Chapter 5
Using the I/O
This chapter provides information and examples that explain how to control,
configure, and monitor a PowerFlex 525 drive using the configured I/O.
Top ic Pa ge
About I/O Messaging
Understanding the I/O Image 59
Using Logic Command/Status 60
Using Reference/Feedback 61
Using Datalinks 61
Example Ladder Logic Program Information 62
CompactLogix Example 62
ATT EN TI ON : Risk of injury or equipment damage exists. The examples in this
publication are intended solely for purposes of example. There are many
variables and requirements with any application. Rockwell Automation, Inc.
does not assume responsibility or liability (to include intellectual property
liability) for actual use of the examples shown in this publication.
59
About I/O Messaging
Understanding the I/O Image
On CIP-based networks, including EtherNet/IP, I/O connections are used to
transfer the data which controls the PowerFlex drive and sets its Reference. I/O
can also be used to transfer data to and from Datalinks in PowerFlex 525 drives.
The adapter includes the Logic Command, Logic Status, Reference, Feedback,
and memory allocation for the Generic Ethernet module profile (all as 16-bit
words) in the controller’s I/O image. This basic I/O must always be configured in
the Ethernet bridge using RSLogix 5000/Logix Designer. Additional I/O, if
needed, can be set using up to four Datalinks to write data and/or up to four
Datalinks to read data. When using any combination of these Datalinks, add one
16-bit word for each Datalink to the basic I/O Input Size and/or Output Size.
Chapter 3
discuss how to configure the adapter and controller on the network for the
required I/O. The Glossary defines the different options. This chapter discusses
how to use I/O after you have configured the drive and controller.
The terms input and output are defined from the controller’s point of view.
Therefore, output I/O is data that is produced by the controller and consumed by
the adapter. Input I/O is data that is produced by the adapter and consumed as
input by the controller. The I/O image will vary based on:
, Configuring the Adapter, and Chapter 4, Configuring the I/O,
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 59
Page 60

Chapter 5 Using the I/O
• How many of the drive’s 16-bit Datalinks ([EN Data In 1...4] and [EN
Data Out 1...4]) are used.
• ControlLogix/CompactLogix Controllers only—The drive Add-On
Profile (AOP) used in RSLogix 5000 (version 17.0 or greater) or Logix
Designer (version 21.0 or greater), or the Generic Profile (all versions).
• If Multi-drive mode is enabled, and the number of daisy-chained drives
that are present.
I/O Controller Image
Since the drive Add-On Profile in RSLogix 5000 (version 17.0 or greater) and
Logix Designer (version 21.0 or greater) provides descriptive controller tags, the
I/O image (tag size and location) is automatically configured based on the drive
being used. When using the Generic Profile in RSLogix 5000/Logix Designer,
however, controller tags are not descriptive.
I/O Image for PowerFlex 525 Drives on page 60 shows the I/O image when using
all of the 16-bit Datalinks.
Using Logic Command/Status
I/O Image for PowerFlex 525 Drives
(16-bit Logic Command/Status, Reference/Feedback, and Datalinks)
INT Output Input Using...
INT Drive Add-On Profile INT Generic Profile
0Logic Command0Logic Status 0Padword
1 Reference 1 Feedback 1 Padword
2 EN Data Out 1 2 EN Data In 1 2 Logic Status
3 EN Data Out 2 3 EN Data In 2 3 Feedback
4 EN Data Out 3 4 EN Data In 3 4 EN Data In 1
5 EN Data Out 4 5 EN Data In 4 5 EN Data In 2
6 EN Data In 3
7 EN Data In 4
The Logic Command is a 16-bit word of control data produced by the controller
and consumed by the adapter. The Logic Status is a 16-bit word of status data
produced by the adapter and consumed by the controller.
When using a ControlLogix, CompactLogix, or MicroLogix 1100/1400
controller, the Logic Command word is always INT 0 in the output image and
the Logic Status word is always:
• INT 0 in the input image when using the drive Add-On Profile.
• INT 2 when using the Generic Profile.
This manual contains the bit definitions for compatible products available at the
time of publication in
Appendix D, Logic Command/Status Words: PowerFlex
525 Drives.
60 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 61

Using the I/O Chapter 5
IMPORTANT
Using Reference/Feedback
The Reference is a 16-bit word that is produced by the controller and consumed
by the adapter. The Feedback is a 16-bit word produced by the adapter and
consumed by the controller.
When using a ControlLogix, CompactLogix, or MicroLogix 1100/1400
controller, the Reference is always INT 1 in the output image (see
PowerFlex 525 Drives on page 60) and the 16-bit Feedback is always:
• INT 1 in the input image when using the drive Add-On Profile.
• INT 3 when using the Generic Profile.
The Reference and Feedback are 16-bit values which represent drive speed in
0.01 Hz.
There are several parameters in the drive that will override the start source and
speed reference command if enabled. For details on these parameters, see the
PowerFlex 525 drive’s user manual, publication
Attempting to write a negative value to the Speed Reference will result in the
drive ramping to maximum speed due to overflow, the direction of the drive
can only be controlled programmatically with the appropriate bits (bits 4 and
5) in the Command Word.
520-UM001.
I/O Image for
Using Datalinks
A Datalink is a mechanism used by PowerFlex drives to transfer data to and from
the controller. Datalinks allow a drive parameter value to be read or written to
without using an Explicit Message. When enabled, each Datalink occupies one
16-bit word in a ControlLogix, CompactLogix, or MicroLogix controller.
The following rules apply when using PowerFlex 525 drive Datalinks:
• Datalinks cannot be used with Multi-drive mode.
• The target of a Datalink can be any parameter, including those of a
peripheral. For example, drive parameter P041 [Accel Time 1] can be the
target of the embedded EtherNet/IP adapter and any or all Option Cards
installed in the drive.
• The data passed through the drive’s Datalink mechanism is determined by
the settings of parameters C157...C160 [EN Data Out 1...4] and
parameters C153...C156 [EN Data In 1...4].
• When an I/O connection that includes Datalinks is active, those Datalinks
being used are locked and cannot be changed until that I/O connection
becomes idle or inactive.
• When you use a Datalink to change a value, the value is NOT written to
the Non-Volatile Storage (NVS). The value is stored in volatile memory
and lost when the drive loses power. Thus, use Datalinks when you need to
change a value of a parameter frequently.
Datalinks for PowerFlex 525 drive peripherals (embedded EtherNet/IP adapter
and Option Modules such as a communication module) are locked when the
peripheral has an I/O connection with a controller. When a controller has an I/O
connection to the drive, the drive does not allow a reset to defaults, configuration
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 61
Page 62

Chapter 5 Using the I/O
download or anything else that could change the makeup of the I/O connection
in a running system. The I/O connection with the controller must first be
disabled to allow changes to the respective Datalinks.
Depending on the controller being used, the I/O connection can be disabled by:
• Inhibiting the module in RSLogix 5000/Logix Designer
• Putting the controller in Program mode
• Placing the scanner in idle mode
• Disconnecting the drive from the network
Example Ladder Logic
Program Information
CompactLogix Example
The example ladder logic programs in the sections of this chapter are intended for
PowerFlex 525 drives.
Functions of the Example Programs
The example programs enable you to:
• Receive Logic Status information from the drive.
• Send a Logic Command to control the drive (for example, start, stop).
• Send a Reference to the drive and receive Feedback from the drive.
• Send/receive Datalink data to/from the drive.
Logic Command/Status Words
These examples use the Logic Command word and Logic Status word for
PowerFlex 525 drives. See
PowerFlex 525 Drives to view details.
Appendix D, Logic Command/Status Words:
Creating Ladder Logic Using the RSLogix 5000/Logix Designer Drive
Add-On Profiles
Since the drive Add-On Profile automatically created descriptive controller tags
(see
Controller Input Tags
I/O image in
the drive without creating any ladder logic program. However, if you intend to
use Human Machine Interface devices (PanelView, etc.) to operate the drive and
view its status, you will need to create descriptive user-defined Program tags (see
CompactLogix Program Tags for Drive Add-On Profile Ladder Logic Program
Example on page 63) and a ladder logic program that will pass the Controller tag
data to the Program tags.
62 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Chapter 4
and Controller Output Tags on page 43) for the entire
, you can use these tags to directly control and monitor
Page 63

Using the I/O Chapter 5
Copy File
Source
Dest
Length
PowerFlex_52X_Drive:I.OutputFreq
Speed_Feedback
1
COP
PowerFlex_52X_Drive:I.DriveStatus_Ready Status_Ready
PowerFlex_52X_Drive:I.DriveStatus_Active Status_Active
PowerFlex_52X_Drive:I.DriveStatus_ActualDir Status_Forward
PowerFlex_52X_Drive:I.DriveStatus_ActualDir Status_Reverse
PowerFlex_52X_Drive:I.DriveStatus_Faulted Status_Faulted
PowerFlex_52X_Drive:I.DriveStatus_AtReference Status_At_Speed
CompactLogix Program Tags for Drive Add-On Profile Ladder Logic Program Example
An example ladder logic program that uses the automatically-created descriptive
Controller tags and passes their data to the user-defined Program tags is shown in
CompactLogix Example Ladder Logic Program Using a Drive Add-On Profile
for Logic Status/Feedback on page 63 and CompactLogix Example Ladder Logic
Program Using a Drive Add-On Profile for Logic Command/Reference on
page 64. Note that the prefix for the drive Controller tags is determined by the
name assigned when configuring the I/O (see
CompactLogix Example Ladder Logic Program Using a Drive Add-On Profile for Logic Status/
Feedback
Chapter 4
).
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 63
Page 64

Chapter 5 Using the I/O
Copy File
Source
Dest
Length
Speed_Reference
PowerFlex_52X_Drive:O.FreqCommand
1
COP
Command_Stop PowerFlex_52X_Drive:O.DriveLogicRslt_Stop
Command_Start PowerFlex_52X_Drive:O.DriveLogicRslt_Star t
Command_Jog PowerFlex_52X_Drive:O.DriveLogicRslt_Jog
Command_Clear_Faults PowerFlex_52X_Drive:O.DriveLogicRslt_ClearFault
Command_Forward_Reverse PowerFlex_52X_Drive:O.DriveLogicRslt_Forward
Command_Forward_Reverse PowerFlex_52X_Drive:O.DriveLogicRslt_Reverse
CompactLogix Example Ladder Logic Program Using a Drive Add-On Profile for Logic Command/
Reference
Creating Ladder Logic Using the RSLogix 5000/Logix Designer Generic
Profile
Controller Tags
When you add the drive to the I/O configuration (see
RSLogix 5000/Logix Designer automatically creates generic (non-descriptive)
controller tags. In this example program, the following controller tags are used.
CompactLogix Controller Tags for Drive Generic Profile Ladder Logic Program Example
Chapter 4),
64 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 65

Using the I/O Chapter 5
Copy File
Source
Dest
Length
PowerFlex_52X_Drive:I.Data[3]
Speed_Feedback
1
COP
PowerFlex_52X_Drive:I.Data[2].0 Status_Ready
PowerFlex_52X_Drive:I.Data[2].1 Status_Active
PowerFlex_52X_Drive:I.Data[2].3 Status_Forward
PowerFlex_52X_Drive:I.Data[2].3 Status_Reverse
PowerFlex_52X_Drive:I.Data[2].7 Status_Faulted
PowerFlex_52X_Drive:I.Data[2].8 Status_At_Speed
You can expand the Input and Output tags to reveal the input and output
configuration (see
CompactLogix Controller Tags for Drive Generic Profile
Ladder Logic Program Example on page 64). The Input tag for this example
requires eight16-bit words of data. The Output tag for this example program
requires six 16-bit words of data.
Program Tags
To use the Controller tags that are automatically created, you need to create the
following Program tags for this example program.
CompactLogix Program Tags for Drive Generic Profile Ladder Logic Program Example
CompactLogix Example Ladder Logic Program Using a Drive Generic Profile for Logic Status/
Feedback
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 65
Page 66

Chapter 5 Using the I/O
Copy File
Source
Dest
Length
Speed_Reference
PowerFlex_52X_Drive:O.Data[1]
1
COP
Command_Stop PowerFlex_52X_Drive:O.Data[0].0
Command_Start PowerFlex_52X_Drive:O.Data[0].0
Command_Jog PowerFlex_52X_Drive:O.Data[0].0
Command_Clear_Faults PowerFlex_52X_Drive:O.Data[0].0
Command_Forward_Reverse PowerFlex_52X_Drive:O.Data[0].0
Command_Forward_Reverse PowerFlex_52X_Drive:O.Data[0].0
CompactLogix Example Ladder Logic Program Using a Drive Generic Profile for Logic Command/
Reference
66 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 67

Chapter 6
IMPORTANT
Using Explicit Messaging
This chapter provides information and examples that explain how to use Explicit
Messaging to configure and monitor the PowerFlex 525 drive and embedded
EtherNet/IP adapter.
Top ic Pa ge
About Explicit Messaging
Performing Explicit Messaging 68
CompactLogix Examples 68
ATT EN TI ON : Risk of injury or equipment damage exists. The examples in this
publication are intended solely for purposes of example. There are many
variables and requirements with any application. Rockwell Automation, Inc.
does not assume responsibility or liability (to include intellectual property
liability) for actual use of the examples shown in this publication.
ATT EN TI ON : Risk of equipment damage exists. If Explicit Messages are
programmed to write parameter data to Non-Volatile Storage (NVS) frequently,
the NVS will quickly exceed its life cycle and cause the drive to malfunction. Do
not create a program that frequently uses Explicit Messages to write parameter
data to NVS. Datalinks do not write to NVS and should be used for frequently
changed parameters.
ATT EN TI ON : If you need to make frequent parameter changes using Explicit
Messages, set parameter C121 [Comm Write Mode] to 1 “RAM only”.
67
About Explicit Messaging
Chapter 5
See
Command/Status, Reference/Feedback, and Datalinks.
Explicit Messaging is used to transfer data that does not require continuous
updates. With Explicit Messaging, you can configure and monitor a device’s
parameters on the network.
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 67
, Using the I/O for information about the I/O Image, using Logic
When an explicit message is performed, by default no connection is made
since it is an “unconnected” message. When timing of the message transaction
is important, you can create a dedicated message connection between the
controller and drive by checking the “Connected” box on the Communications
tab message configuration screen during message setup. These message
connections are in addition to the I/O connection. However, the trade off for
more message connections is decreased network performance. If your
application cannot tolerate this, do not check the “Connected” box, which is
recommended.
Page 68

Chapter 6 Using Explicit Messaging
IMPORTANT
IMPORTANT
➎
➊
➋
➌
➍
Esc
Sel
1 (Front)1 (Front)1 (Front)
2 (Rear)
00:00:BC:2E:69:F6
Complete Explicit
Message
Retrieve Explicit
Message Response
Set up and send Explicit
Message Request
Network
Ethernet
switch
TIP
PowerFlex 525 drives have explicit messaging limitations. See Explicit
Messaging Class Code Compatibility with PowerFlex 525 Drives on page 68 for
more information.
Explicit Messaging Class Code Compatibility with PowerFlex 525 Drives
EtherNet/IP Object Class Code Compatibility Explicit Messaging Function
Parameter Object 0x0F Yes Single parameter reads/write
DPI Parameter Object 0x93 Yes Single and scattered parameter reads/write
Performing Explicit
Messaging
There are five basic events in the Explicit Messaging process. The details of each
step will vary depending on the type of controller being used. See the
documentation for your controller.
There must be a request message and a response message for all Explicit
Messages, whether you are reading or writing data.
Explicit Messaging Process
Event Description
➊ You format the required data and set up the ladder logic program to send an Explicit Message request to the
scanner or bridge module (download).
➋ The scanner or bridge module transmits the Explicit Message Request to the slave device over the network.
➌ The slave device transmits the Explicit Message Response back to the scanner. The data is stored in the
scanner buffer.
➍ The controller retrieves the Explicit Message Response from the scanner’s buffer (upload).
➎ The Explicit Message is complete.
For information on the maximum number of Explicit Messages that can be
executed at a time, see the documentation for the bridge or scanner and/or
controller that is being used.
CompactLogix Examples
To display the Message Configuration screen in RSLogix 5000/Logix Designer,
add a message instruction (MSG), create a new tag for the message
68 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
(Properties: Base tag type, MESSAGE data type, controller scope), and click the
button in the message instruction.
Page 69

Using Explicit Messaging Chapter 6
IMPORTANT
Execute_Scattered_Read_Message
Message
Message Control Scattered_Read_Message
MSG
EN
DN
ER
For supported classes, instances, and attributes, see
Appendix C, EtherNet/IP
Objects.
The explicit messaging examples in this section can be performed using any
firmware version of RSLogix 5000/Logix Designer.
The read and write messaging examples in this section are for Device
parameters which use Class Code 0x93.
The Message Configuration has a Service Type of “Parameter Read” which is
Class code 0x0F, Parameter Object.
CompactLogix Example Ladder Logic Program to Read a Single
Parameter
A Get Attribute Single message is used to read a single parameter. This read
message example reads the value of the 16-bit parameter b003 [Output Current]
in a PowerFlex 525 drive.
Example Controller Tags to Read a Single Parameter
Operation Controller Tags for Single Read Message Data Types
XIC Execute_Single_Read_Message BOOL
MSG Single_Read_Message MESSAGE
Example Ladder Logic to Read a Single Parameter
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 69
Page 70
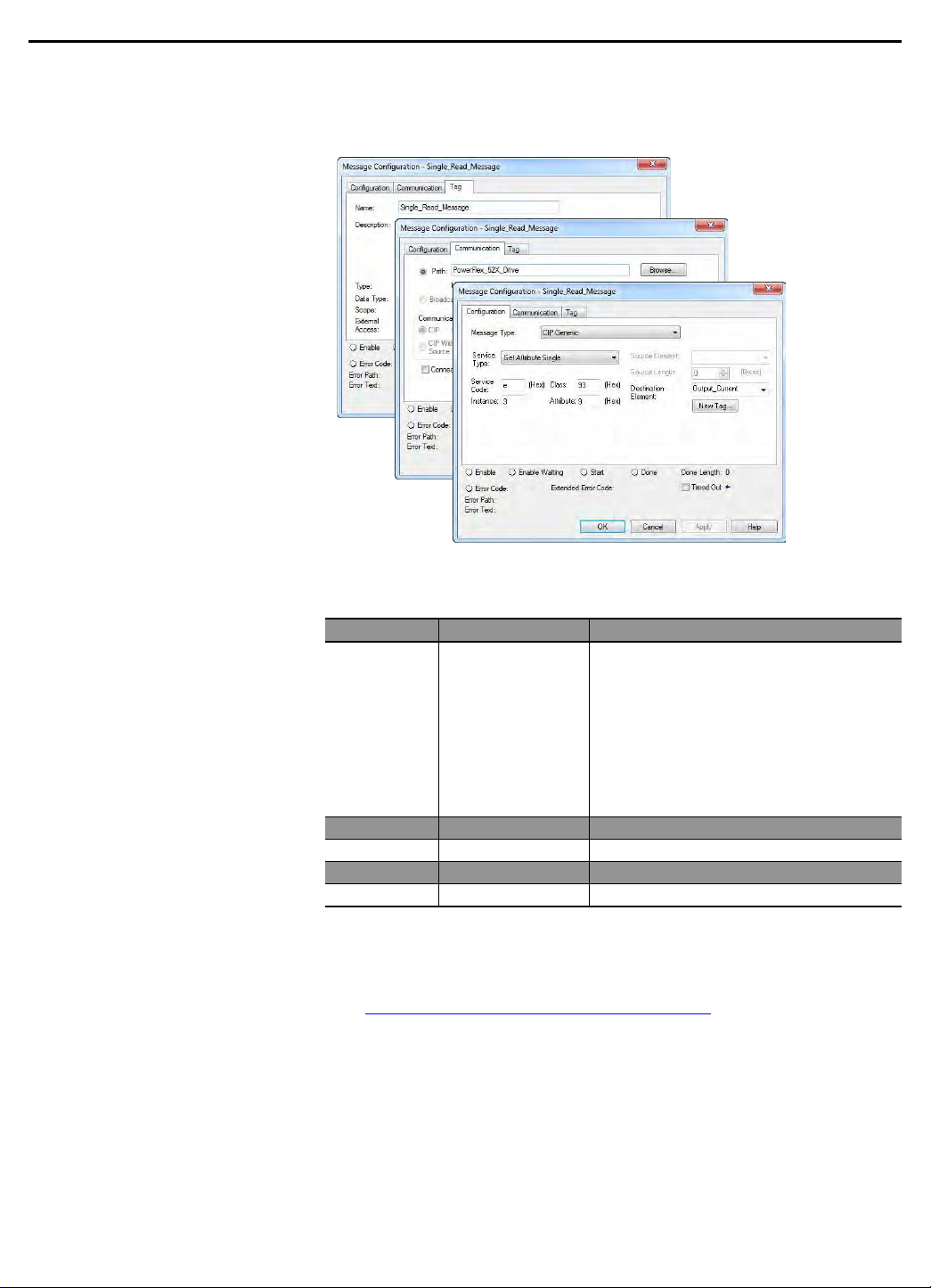
Chapter 6 Using Explicit Messaging
CompactLogix – Formatting a Message to Read a Single Parameter
Get Attribute Single Message Configuration Screens
The following table identifies the data that is required in each box to configure a
message to read a single parameter.
Configuration Tab Example Value Description
Message Type
Service Type
Service Code
Class
Instance
Attribute
Source Element
Source Length
Destination
(1)
(1)
CIP Generic
Get Attribute Single
e (Hex.)
(3)
93
3 (Dec.)
9 (Hex.)
–
0 bytes
Output_Current
(4)
Communication Tab Example Value Description
Path
(2)
PowerFlex_52X_Drive The path is the route that the message will follow.
Tag Ta b Example Value Description
Name Single_Read_Message The name for the message.
(1) The default setting for Service Type is “Custom,” enabling entry of a Service Code not available from the Service Type pull-down
menu. When choosing a Service Type other than “Custom” from the pull- down menu, an appropriate Hex. value is automatically
assigned to the Service Code box which is dimmed (unavailable).
(2) Click Browse to find the path, or type in the name of the device listed in the I/O Configuration folder (for this example,
PowerF lex_52 X_Driv e).
Explicit Messaging Class Code Compatibility with PowerFlex 525 Drives on page 68 for limitations of PowerFlex 525 drives when
(3) See
using DPI Parameter Object Class code 0x93 for explicit messaging.
(4) In this example, Output Current is a 16-bit parameter requiring the Data Type field to be set to “INT ” when creating the controller
tag. See the drive documentation to determine the size of the parameter and its data type.
Used to access the DPI Parameter Object in the adapter.
This service is used to read a parameter value.
Code for the requested service.
Class ID for the DPI Parameter Object.
Instance number is the same as parameter number.
Attribute number for the Parameter Value att ribute.
Leave blank (not applicable).
Number of bytes of service data to be sent in the message.
The tag where the data that is read is stored.
70 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 71

Using Explicit Messaging Chapter 6
Execute_Single_Write_Message
Message
Message Control Single_Write_Message
MSG
EN
DN
ER
CompactLogix Example Ladder Logic Program to Write a Single
Parameter
A Set Attribute Single message is used to write to a single parameter. This write
message example writes a value to the 16-bit parameter P041 [Accel Time 1] in a
PowerFlex 525 drive.
Example Controller Tags to Write a Single Parameter
Operation Controller Tags for Single Write Message Data Types
XIC Execute_Single_Write_Message BOOL
MSG Single_Write_Message MESSAGE
Example Ladder Logic to Write a Single Parameter
CompactLogix – Formatting a Messageto Write a Single Parameter
Set Attribute Single Message Configuration Screens
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 71
Page 72

Chapter 6 Using Explicit Messaging
The following table identifies the data that is required in each box to configure a
message to write a single parameter.
Configuration Tab Example Value Description
Message Type
Service Type
Service Code
Class
(2)
Instance
(3)
Attribute
Source Element
Source Length
Destination
(1)
(1)
CIP Generic
Get Attribute Single
10 (Hex.)
(5)
93
41 (Dec.)
9 or A (Hex.)
Accel_Time_1
(6)
2 bytes
–
Communication Tab Example Value Description
Path
(4)
PowerFlex_52X_Drive The path is the route that the message will follow.
Tag Ta b Example Value Description
Name Single_Write_Message The name for the message.
(1) The default setting for Service Type is “Custom,” enabling entry of a Service Code not available from the Service Type pull-down
menu. When choosing a Service Type other than “Custom” from the pull- down menu, an appropriate Hex. value is automatically
assigned to the Service Code box which is dimmed (unavailable).
(2) The instance is the parameter number in the drive.
(3) Setting the Attribute value to “9” will write the parameter value to the drive’s Non-Volatile Storage (EEPROM) memory, so the
parameter value will remain even after the drive is power cycled. Impor tant: When set to “9,” be very cau tious as the EEPROM may
quickly exceed its life cycle and cause the drive to malfunction. Setting the Attribute value to “A” will write the parameter value to
temporary memory, so the parameter value will be lost after the drive is powe r cycled. It is recommended to use the “A” setting
when frequent write messages are required. Important: If you need to make frequent parameter changes using Explicit Messages,
set parameter C121 [Comm Write Mode] to 1 “RAM only”.
(4) Click Browse to find the path, or type in the name of the device listed in the I/O Configuration folder (for this example,
PowerF lex_52 X_Driv e).
(5) See
Explicit Messaging Class Code Compatibility with PowerFlex 525 Drives on page 68 for limitations of PowerFlex 525 drives when
using DPI Parameter Object Class code 0x93 for explicit messaging.
(6) In this example, Accel Time 1 is a 16-bit parameter requiring the Data Type field to be set to “INT” when creating the controller tag.
Also, the Source Length field on the Message Configuration screen must correspond to the selected Data Type in bytes (for example,
2 bytes for an INT). See the drive documentation to determine the size of the parame ter and its data type.
Used to access the DPI Parameter Object in the adapter.
This service is used to read a parameter value.
Code for the requested service.
Class ID for the DPI Parameter Object.
Instance number is the same as parameter number.
Attribute number for the Parameter Value att ribute.
Name of the tag for any service data to be sent from the scanner
or bridge to the drive.
Number of bytes of service data to be sent in the message.
Leave blank (not applicable).
CompactLogix Example Ladder Logic Program to Read Multiple
Parameters
A Scattered Read message is used to read the values of multiple parameters. This
read message example reads the values of these five 16-bit parameters in a
PowerFlex 525 drive:
• Parameter b001[Output Freq]
• Parameter b003 [Output Current]
• Parameter b004 [Output Voltage]
• Parameter b005 [DC Bus Voltage]
• Parameter b017 [Output Power]
Example Controller Tags to Read Multiple Parameters
Operation Controller Tags for Scattered Read Message Data Types
XIC Execute_Scattered_Read_Message BOOL
MSG Scattered_Read_Message MESSAGE
72 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 73

Using Explicit Messaging Chapter 6
Execute_Scattered_Read_Message
Message
Message Control Scattered_Read_Message
MSG
EN
DN
ER
Example Ladder Logic to Read Multiple Parameters
CompactLogix – Formatting a Messageto Read Multiple Parameters
Scattered Read Message Configuration Screens
The following table identifies the data that is required in each box to configure a
message to read multiple parameters.
Configuration Tab Example Value Description
Message Type
Service Type
Service Code
Class
Instance
Attribute
Source Element
Source Length
Destination
Communication Tab Example Value Description
Path
Tag Ta b Example Value Description
Name Scattered_Read_Message The name for the message.
(1) The default setting for Service Type is “Custom,” enabling entry of a Service Code not available from the Service Type pull-down
(2) Click Browse to find the path, or type in the name of the device listed in the I/O Configuration folder (for this example,
(3) See
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 73
(1)
(1)
(2)
menu. When choosing a Service Type other than “Custom” from the pull- down menu, an appropriate Hex. value is automatically
assigned to the Service Code box which is dimmed (unavailable).
PowerF lex_52 X_Driv e).
Explicit Messaging Class Code Compatibility with PowerFlex 525 Drives on page 68 for limitations of PowerFlex 525 drives when
using DPI Parameter Object Class code 0x93 for explicit messaging.
CIP Generic
Custom
0x32 (Hex.)
(3)
93
0 (Dec.)
0 (Hex.)
Scattered_Read_Request
(4)
20 bytes
Scattered_Read_Response
Used to access the DPI Parameter Object in the adapter.
Required for scattered messages.
Code for the requested service.
Class ID for the DPI Parameter Object.
Required for scattered messages.
Required for scattered messages.
(4)
Name of the tag for any service data to be sent from the scanner
or bridge to the drive.
(5)
Number of bytes of service data to be sent in the message.
The tag where the data that is read is stored.
PowerFlex_52X_Drive The path is the route that the message will follow.
Page 74
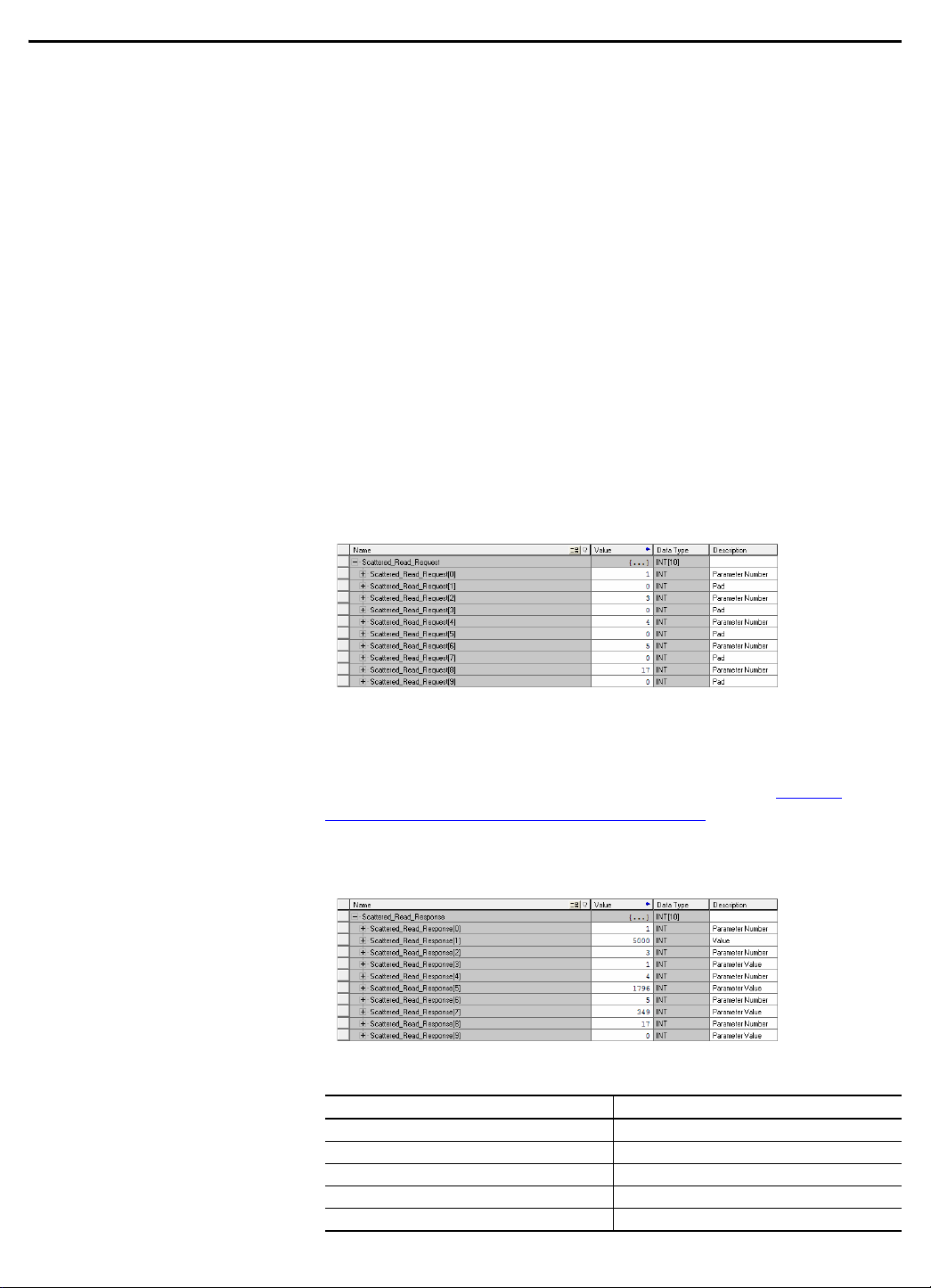
Chapter 6 Using Explicit Messaging
(4) In this example, we are reading five 16-bit parameters. Each parameter being read requires two contiguous INT registers. Therefore,
a controller tag was created with its Data Type field set to “INT[10].” Also, the Source Length field on the Message Configuration
screen must correspond to the selected Data Type in bytes (for this example, 20 bytes for an INT[10] array). Scattered read messages
always assume that every parameter be ing read is a16-bit parameter, regardless of its actual size. Maximum message length is 25 6
bytes which can read up to 6 4 parameters, regardless of their size.
(5) The controller tag for “Scattered_Read_Response” must be the same size as the controller tag for “Scattered_Read_Request” (for
this example, 20 bytes), but can be a different data type (for this example, a UDDT to handle conver sions to parameter values that
are a REAL data type).
CompactLogix Example Scattered Read Request Data
In this message example, we use the data structure in Figure 101 in the source tag
named Scattered Read Request to read these five 16-bit parameters in a
PowerFlex 525 drive:
• Parameter b001 [Output Freq]
• Parameter b003 [Output Current]
• Parameter b004 [Output Voltage]
• Parameter b005 [DC Bus Voltage]
• Parameter b017 [Output Power]
Example Scattered Read Request Data
CompactLogix Example Scattered Read Response Data
The Scattered Read Request message reads the multiple parameters and returns
their values to the destination tag (Scattered_Read_Response).
Scattered Read Response Converted Data on page 74 shows the parameter
values.
Example Scattered Read Response Converted Data
In this message example, the parameters have the following values:
PowerFlex 525 Drive Parameters Read Value
b001 [Output Freq] 50.00 Hz
b003 [Output Current] 0.01 Amp (No load)
b004 [Output Voltage] 179.6V AC
b005 [DC Bus Voltage] 349V DC
b017 [Output Power] 0 kW (No load)
Example
74 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 75

Using Explicit Messaging Chapter 6
IMPORTANT
Execute_Scattered_Write_Message
Message
Message Control Scattered_Write_Message
MSG
EN
DN
ER
CompactLogix Example Ladder Logic Program to Write Multiple
Parameters
A Scattered Write message is used to write to multiple parameters. This write
message example writes the following values to these five 16-bit parameters in a
PowerFlex 525 drive:
PowerFlex 525 Drive Parameters Write Value
A442 [Accel Time 2] 11.10 Sec
A443 [Decel time 2] 22.20 Sec
A415 [Preset Freq 5] 33.30 Hz
A416 [Preset Freq 6] 44.40 Hz
A417 [Preset Freq 7] 55.50 Hz
Example Controller Tags to Write Multiple Parameters
Operation Controller Tags for Scattered Write Message Data Types
XIC Execute_Scattered_Write_Message BOOL
MSG Scattered_Write_Message MESSAGE
Example Ladder Logic to Write Multiple Parameters
If the explicit message scattered write must be written continuously, then use
a separate explicit message single write for each parameter using DPI
Parameter Object Class code 0x93 and attribute A (see
CompactLogix –
Formatting a Messageto Write a Single Parameter on page 71). Attribute A
writes to RAM—not NVS (EEPROM) memory. This example scattered write
message using attribute 0 writes to NVS. Over time, continuous writes will
exceed the EEPROM life cycle and cause the drive to malfunction.
If you need to make frequent parameter changes using Explicit Messages, set
parameter C121 [Comm Write Mode] to 1 “RAM only”.
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 75
Page 76

Chapter 6 Using Explicit Messaging
CompactLogix – Formatting a Message to Write Multiple Parameters
Scattered Write Multiple Message Configuration Screens
The following table identifies the data that is required in each box to configure a
message to write multiple parameters.
Configuration Tab Example Value Description
Message Type
Service Type
Service Code
(1)
(1)
Class
Instance
(2)
Attribute
Source Element
Source Length
Destination
Communication Tab Example Value Description
(3)
Path
Tag Ta b Example Value Description
Name Scattered_Read_Message The name for the message.
(1) The default setting for Service Type is “Custom,” enabling entry of a Service Code not available from the Service Type pull-down
menu. When choosing a Service Type other than “Custom” from the pull- down menu, an appropriate Hex. value is automatically
assigned to the Service Code box which is dimmed (unavailable).
(2) Scattered writes always write parameter values to the drive’s Non-Volatile Storage (EEPROM) memory, so these values will remain
even after the drive is power cycled. Important: Be very cautious as the EEPROM may quick ly exce ed its life cycle and cause the
drive to malfunction. Important: If you need to make frequent parameter changes using Explicit Messages, set parameter C121
[Comm Write Mode] to 1 “RAM only”.
(3) Click Browse to find the path, or type in the name of the device listed in the I/O Configuration folder (for this example,
PowerF lex_52 X_Driv e).
Explicit Messaging Class Code Compatibility with PowerFlex 525 Drives on page 68 for limitations of PowerFlex 525 drives when
(4) See
using DPI Parameter Object Class code 0x93 for explicit messaging.
(5) In this example, we are writing to five 16-bit parameters. Each parameter being written to requires two contiguous INT registers.
Also, the Source Length field on the Message Configuration screen must correspond to the selected Data Type in bytes (for this
example, 20 bytes for an array of ten INTs). Scattered write messages always assume that every parameter being written to is a 16bit parameter, regardless of its actual size. Maximum message length is 256 bytes which can write up to 64parameters, regardless of
their size. For parameter numbering, see
CIP Generic
Custom
0x34 (Hex.)
(4)
93
0 (Dec.)
0 (Hex.)
Scattered_Write_Request
(5)
20 bytes
Scattered_Write_Response
Used to access the DPI Parameter Object in the adapter.
Required for scattered messages.
Code for the requested service.
Class ID for the DPI Parameter Object.
Required for scattered messages.
Required for scattered messages.
(5)
Name of the tag for any service data to be sent from the scanner
or bridge to the drive.
(6)
Number of bytes of service data to be sent in the message.
The tag where the data that is read is stored.
PowerFlex_52X_Drive The path is the route that the message will follow.
DPI Parameter Object
on page 138 (Class code 0x93).
76 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 77
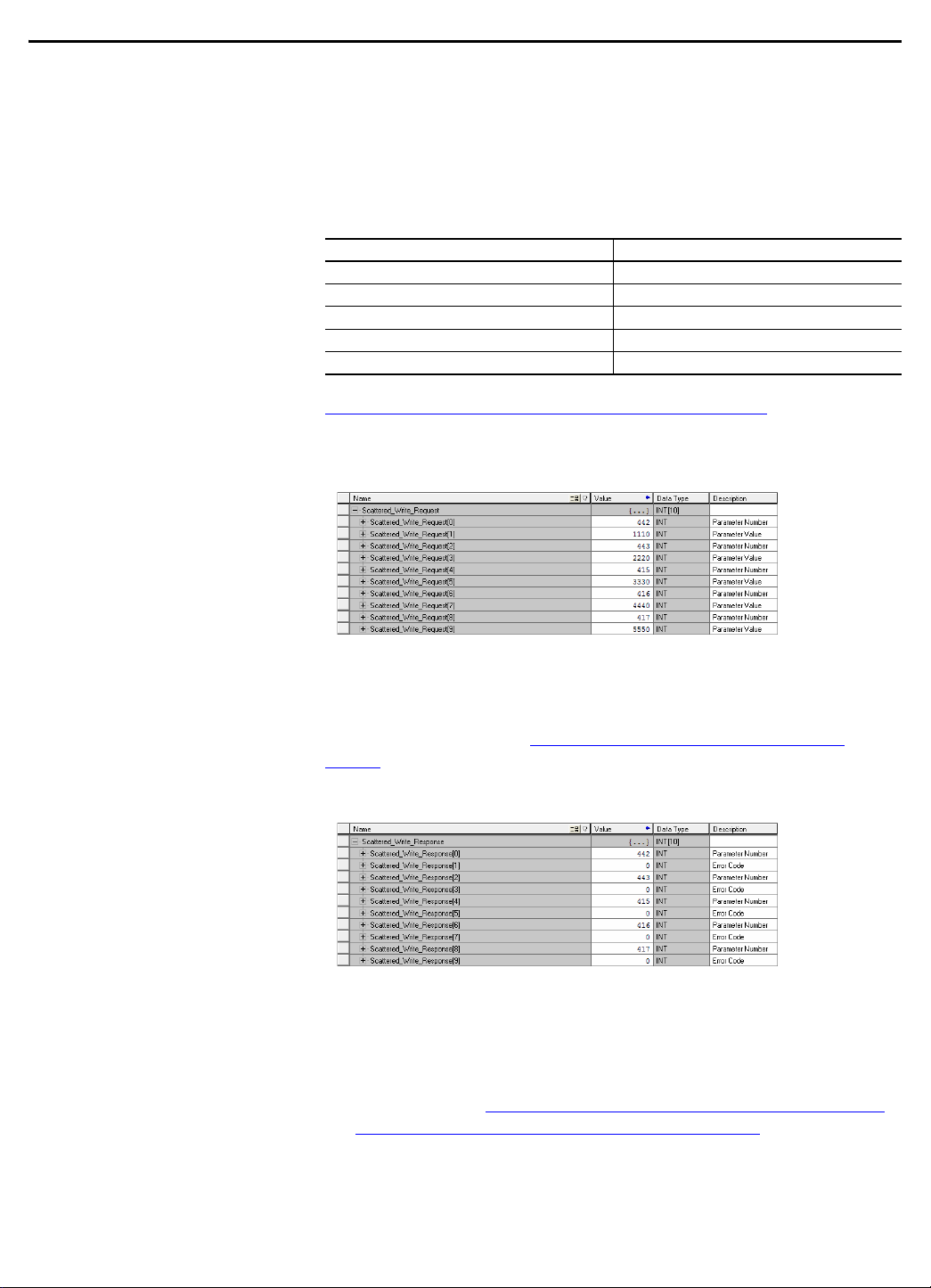
Using Explicit Messaging Chapter 6
(6) The controller tag for “Scattered_Write_Response” must be the same size as the controller tag for “Scattered_Write_Request” (for
this example, 20 bytes). An array of INTs is suggested to be able to read any error codes that are returned.
CompactLogix Example Scattered Write Request Data
In this message example, we use the source tag (Scattered_Write_Request) to
write new values to these 16-bit parameters:
PowerFlex 525 Drive Parameters Write Value
A442 [Accel Time 2] 11.10 Sec
A443 [Decel time 2] 22.20 Sec
A415 [Preset Freq 5] 33.30 Hz
A416 [Preset Freq 6] 44.40 Hz
A417 [Preset Freq 7] 55.50 Hz
Example Scattered Write Request Converted Data on page 77 shows the
parameter values.
Example Scattered Write Request Converted Data
CompactLogix Example Scattered Write Response Data
The results of the message appear in the destination tag named
Scattered_Write_Response (
Example Scattered Write Response Data
on
page 77). Values of “0” indicate no errors occurred.
Example Scattered Write Response Data
CompactLogix – Explanation of Request and Response Data for Read/
Write Multiple Messaging
The data structures in
Data Structures for Scattered Write Messages
and
and can accommodate up to 64 parameters in a single message. In the Response
Message, a parameter number with Bit 15 set indicates that the associated
parameter value field contains an error code (parameter number in response data
will be negative).
Data Structures for Scattered Read Messages on page 78
on page 79 use 16-bit words
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 77
Page 78

Chapter 6 Using Explicit Messaging
The PowerFlex 525 Adjustable Frequency AC Drive User Manual, publication
520-UM001
Data Structures for Scattered Read Messages
INT 0 Parameter Number INT 0 Parameter Number
1Pad 1Parameter Value
2 Parameter Number 2 Parameter Number
3Pad 3Parameter Value
4 Parameter Number 4 Parameter Number
5Pad 5Parameter Value
6 Parameter Number 6 Parameter Number
7Pad 7Parameter Value
8 Parameter Number 8 Parameter Number
9Pad 9Parameter Value
10 Parameter Number 10 Parameter Number
11 Pad 11 Parameter Value
12 Parameter Number 12 Parameter Number
13 Pad 13 Parameter Value
14 Parameter Number 14 Parameter Number
15 Pad 15 Parameter Value
16 Parameter Number 16 Parameter Number
17 Pad 17 Parameter Value
18 Parameter Number 18 Parameter Number
19 Pad 19 Parameter Value
20 Parameter Number 20 Parameter Number
21 Pad 21 Parameter Value
22 Parameter Number 22 Parameter Number
23 Pad 23 Parameter Value
24 Parameter Number 24 Parameter Number
25 Pad 25 Parameter Value
26 Parameter Number 26 Parameter Number
27 Pad 27 Parameter Value
28 Parameter Number 28 Parameter Number
29 Pad 29 Parameter Value
30 Parameter Number 30 Parameter Number
31 Pad 31 Parameter Value
32 Parameter Number 32 Parameter Number
33 Pad 33 Parameter Value
34 Parameter Number 34 Parameter Number
35 Pad 35 Parameter Value
...
62 Parameter Number 62 Parameter Number
63 Pad 63 Parameter Value
lists the data type for each parameter.
Request (Source Data) Response (Destination Data)
...
...
...
78 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 79
Using Explicit Messaging Chapter 6
Data Structures for Scattered Write Messages
Request (Source Data) Response (Destination Data)
INT 0 Parameter Number INT 0 Parameter Number
1 Parameter Value 1 Pad
2 Parameter Number 2 Parameter Number
3 Parameter Value 3 Pad
4 Parameter Number 4 Parameter Number
5 Parameter Value 5 Pad
6 Parameter Number 6 Parameter Number
7 Parameter Value 7 Pad
8 Parameter Number 8 Parameter Number
9 Parameter Value 9 Pad
10 Parameter Number 10 Parameter Number
11 Parameter Value 11 Pad
12 Parameter Number 12 Parameter Number
13 Parameter Value 13 Pad
14 Parameter Number 14 Parameter Number
15 Parameter Value 15 Pad
16 Parameter Number 16 Parameter Number
17 Parameter Value 17 Pad
18 Parameter Number 18 Parameter Number
19 Parameter Value 19 Pad
20 Parameter Number 20 Parameter Number
21 Parameter Value 21 Pad
22 Parameter Number 22 Parameter Number
23 Parameter Value 23 Pad
24 Parameter Number 24 Parameter Number
25 Parameter Value 25 Pad
26 Parameter Number 26 Parameter Number
27 Parameter Value 27 Pad
28 Parameter Number 28 Parameter Number
29 Parameter Value 29 Pad
30 Parameter Number 30 Parameter Number
31 Parameter Value 31 Pad
32 Parameter Number 32 Parameter Number
33 Parameter Value 33 Pad
34 Parameter Number 34 Parameter Number
35 Parameter Value 35 Pad
...
62 Parameter Number 62 Parameter Number
63 Parameter Value 63 Pad
...
...
...
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 79
Page 80

Chapter 6 Using Explicit Messaging
Notes:
80 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 81

Chapter 7
Esc
Sel
Esc
Sel
Esc
Sel
One drive per node
EtherNet/IP
PowerFlex 525 PowerFlex 525 PowerFlex 525
Using Multi-Drive Mode
This chapter provides instructions on how to configure a CompactLogix
controller to use the PowerFlex 525 drive in Multi-drive mode.
Top ic Pag e
Single-Drive Mode vs. Multi-Drive Mode
System Wiring 83
Understanding the I/O Image 83
Configuring the RS-485 Network 84
Using Multi-Drive Add-On Profile 85
Multi-Drive Ladder Logic Program for Generic Profile 95
CompactLogix Example Using Generic Profile 97
Multi-Drive Mode Explicit Messaging 105
Additional Information 106
81
Single-Drive Mode vs. MultiDrive Mode
ATT EN TI ON : Risk of injury or equipment damage exists. The examples in this
publication are intended solely for purposes of example. There are many
variables and requirements with any application. Rockwell Automation, Inc.
does not assume responsibility or liability (to include intellectual property
liability) for actual use of the examples shown in this publication.
Single-drive mode is a typical network installation, where a single EtherNet/IP
node consists of a single drive with an EtherNet/IP adapter.
Single-Drive Mode Example for Network
Multi-drive mode is an alternative to the typical network installation, where a
single EtherNet/IP node can consist of one to five drives (see
Multi-Drive Mode
Example for Network on page 82). The first drive must be a PowerFlex 525 drive.
The remaining drives can be any PowerFlex drive which supports Multi-drive
mode.
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 81
Page 82

Chapter 7 Using Multi-Drive Mode
IMPORTANT
Esc
Sel
Up to 5 drives per node
EtherNet/IP
Up to four daisy-chained PowerFlex drives
(PowerFlex 4M s hown)
RS-485 cable
PowerFlex 525
as master drive
AK-U0-RJ45-TB2P connector with
terminating resistor (120 Ω)
AK-U0-RJ45-TB2P connector with
terminating resistor (120 Ω)
AK-U0-RJ45-TB2P
For the examples in the chapter, we will use the PowerFlex 525 as a master
drive with four daisy-chained PowerFlex 4M drives.
Multi-Drive Mode Example for Network
Benefits of Multi-drive mode include:
• Lower hardware costs. No need to purchase additional communication
adapters for daisy-chained drives.
• Reduces the network node count. For example, in Single-drive mode 30
drives would consume 30 nodes. In Multi-drive mode, 30 drives can be
connected in 6 nodes.
• Controller can control, monitor, and read/write parameters for all five
drives.
The trade-offs of Multi-drive mode include:
• If the PowerFlex 525 with embedded EtherNet/IP adapter is powered
down, then communications with the daisy-chained drives is disrupted
and the drives will take the appropriate communications loss action set in
each drive.
• Communications throughput to the daisy-chained drives will be slower
than if each drive was a separate node on EtherNet/IP (Single-drive
mode). This is because the embedded EtherNet/IP adapter must take the
EtherNet/IP data for the other drives and sequentially send the respective
data to each drive over RS-485. The approximate additional throughput
time for Logic Command/Reference to be transmitted and received by
each drive is:
Drive Additional Throughput Time
PowerFlex 525 0 ms
PowerFlex 525 plus 1 drive +24 ms
PowerFlex 525 plus 2 drives +48 ms
PowerFlex 525 plus 3 drives +72 ms
PowerFlex 525 plus 4 drives +96 ms
versus Single-Drive Mode
82 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 83

Using Multi-Drive Mode Chapter 7
To PowerFlex 525 with
embedded EtherNet/IP
To Drive #2 To Drive #3 To Drive #4 To Drive #5
120 Ω, 1/4 W
resistor
120 Ω, 1/4 W
resisto r
• Since the RS-485 ports are used for daisy-chaining the drives, there is no
connection for a peripheral device such as a HIM or USB converter
module (1203-USB). DSI Splitter cables cannot be used to add a second
connection for a peripheral device.
System Wiring
To daisy-chain the drives of the PowerFlex 525, the AK-U0-RJ45-TB2P terminal
block connector can be used for easy installation.
The wiring diagram for using AK-U0-RJ45-TB2P terminal block connectors is
shown below.
Understanding the I/O Image
The AK-U0-RJ45-TB2P comes with (5) terminal block connectors and (2)
terminating resistors.
The terms input and output are defined from the scanner’s point of view.
Therefore, Output I/O is data that is output from the scanner and consumed by
the EtherNet/IP adapter. Input I/O is status data that is produced by the adapter
and consumed as input by the scanner.
The I/O image table will vary based on the configuration of parameters C169
[MultiDrv Sel] and C175 [DSI I/O Cfg]. The image table always uses
consecutive words starting at word 0.
Multi-Drive Example of I/O Image on page 84 is an illustration of the
The
Multi-drive I/O image with 16-bit words.
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 83
Page 84

Chapter 7 Using Multi-Drive Mode
Multi-Drive Example of I/O Image
Controller
Scanner
Output
Image
(Write)
Input
Image
(Read)
EtherNet/IP
Drive 0
Drive 1
Drive 2
Drive 3
Drive 4
Drive 0
Drive 1
Drive 2
Drive 3
Drive 4
Adapter
Wor d and I /O
Word 0
Logic CommandWord 0
ReferenceWord 1
Logic CommandWord 2
ReferenceWord 3
Logic CommandWord 4
ReferenceWord 5
Logic CommandWord 6
ReferenceWord 7
Logic CommandWord 8
ReferenceWord 9
Padword
PadwordWord 1
Logic StatusWord 2
FeedbackWord 3
Logic StatusWord 4
FeedbackWord 5
Logic StatusWord 6
FeedbackWord 7
Logic StatusWord 8
FeedbackWord 9
Logic StatusWord 10
FeedbackWord 11
DSI
PowerFlex Drive 0
PowerFlex Drive 1
PowerFlex Drive 2
PowerFlex Drive 3
PowerFlex Drive 4
(1)
PowerFlex Drive 0
PowerFlex Drive 1
PowerFlex Drive 2
PowerFlex Drive 3
PowerFlex Drive 4
Configuring the RS-485
Network
Message
Handler
(1) Padwords only apply when using the generic profile. Padwords are not used when using the full-featured drive Add-On-Profile.
Message
Buffer
Note: If a daisy-chained drive is disconnected from the RS-485 (DSI) network
or powered down, the Logic Status and Feedback words for the affected drive will
be set to 0.
The following parameters must be set in the daisy-chained PowerFlex 4M drives
and not in the master drive:
Parame ter Value
P106 [Start Source] 5 “Comm Port”
P108 [Speed Reference] 5 “Comm Port”
C302 [Comm Data Rate] 4 “19.2K”
C303 [Comm Node Addr] 1...247 (must be unique)
C306 [Comm Format] 0 “RTU-8-N-1”
Note : The RS-485 Multi-drive network is fixed at 19.2K baud rate, 8 data bits,
no parity, and 1 stop bit.
84 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 85
Using Multi-Drive Mode Chapter 7
IMPORTANT
IMPORTANT
Parameters C125 [Comm Loss Action] and C126 [Comm Loss Time] in the daisychained drives are still used in Multi-drive mode. If the RS-485 cable is
disconnected or broken, the disconnected drive(s) will take the corresponding
Comm Loss Action(s). On the EtherNet/ IP side, parameters C143 [EN Comm Flt
Actn] and C144 [EN Idle Flt Actn] determine the action taken for ALL of the
drives on the Multi-drive node.
The following Multi-drive parameters must be set in the master PowerFlex 525
drive:
Parame ter Value
P046 [Start Source 1] 5 “EtherNet/IP”
P047 [Speed Reference1] 15 “EtherNet/IP”
C169 [MultiDrv Sel] 0 “Disabled”
1 “Network Opt”
2 “EtherNet/IP”
Note: Drive must be power cycled after setting this
parameter.
C171 [Drv 1 Addr] C124 [RS485 Node Addr] in Drive 1
C172 [Drv 2 Addr] C124 [RS485 Node Addr] in Drive 2
C173 [Drv 3 Addr] C124 [RS485 Node Addr] in Drive 3
C174 [Drv 4 Addr] C124 [RS485 Node Addr] in Drive 4
C175 [DSI I/O Cfg] 0 “Drive 0”
1 “Drive 0-1”
2 “Drive 0-2”
3 “Drive 0-3”
4 “Drive 0-4”
Using Multi-Drive Add-On
Profile
Parameters can be set using a DSI peripheral (22-HIM-A3 or 22-HIM-C2S) only
when parameter C169 [MultiDrv Sel] is set to 0 “Disabled”.
Before using the Multi-drive Add-On Profile, ensure that you have completed the
following steps:
• The master and daisy-chained drives are powered, networked, and
configured. See
• The RS-485 network is configured. See
System Wiring on page 83.
Configuring the RS-485 Network
on page 84.
• The controller has been added to the I/O configuration. See
Adding the
Controller to the I/O Configuration on page 36.
Adding the Drive to the I/O Configuration
To transmit data between the controller and the drive, you must add the drive as a
child device to the parent controller. In this example, RSLogix 5000 version 20.0
is used with drive Add-On Profile version 1.01 or later.
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 85
Page 86

Chapter 7 Using Multi-Drive Mode
TIP
1. In the treeview, right-click on the icon and select New
Module… to display the Select Module window. Expand the Drives group
to display all of the available drives with their communication adapters.
If the PowerFlex drive is not shown, go to www.ab.com/support/
abdrives/webupdate and download the latest drive Add-On Profile.
2. In the Select Module Type window, select the drive and its connected
adapter from the list. For this example, we selected “PowerFlex 525EENET-Multi.” Then click Create. The drive’s New Module window
appears.
86 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 87

Using Multi-Drive Mode Chapter 7
3. On the General tab, edit the following data about the drive:
Box Setting
Name A name to identify the drive.
Description Optional – description of the drive/adapter.
IP Address The IP address of the adapter.
4. On the New Module window in the Module Definition section, click
Change… to launch the Module Definition window and begin the drive
configuration process.
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 87
Page 88
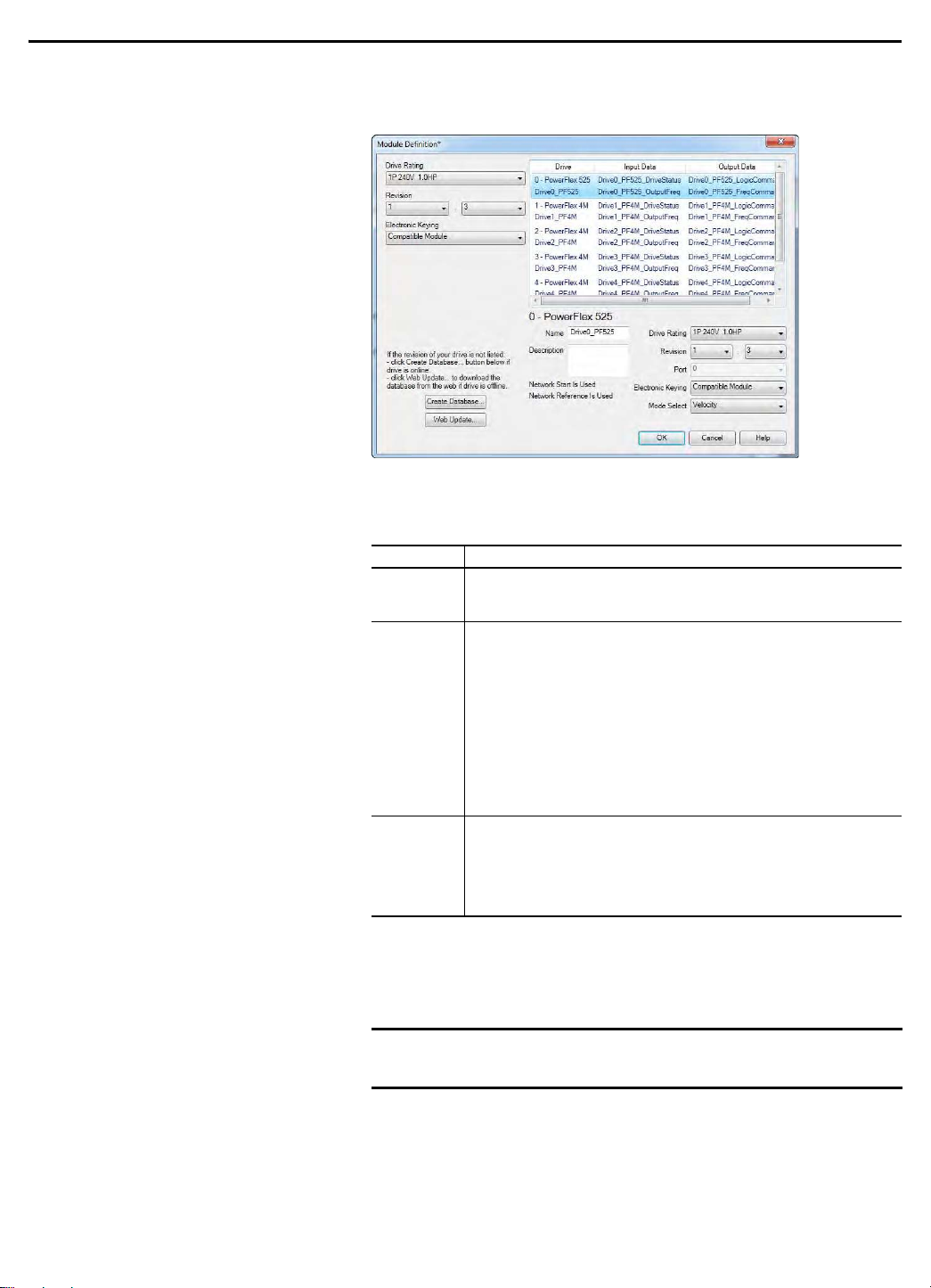
Chapter 7 Using Multi-Drive Mode
TIP
IMPORTANT
5. In the Module Definition window, edit the following information for the
master drive:
You may create a database from a network accessible drive using the
Create Database... button (Recommended).
Box Setting
Drive Rating The voltage and current rating of the drive. If the drive rating is not listed, the drive
Revision The major and minor revision of the firmware (database) in the drive. If the drive’s major
Electronic Keying Compatible Module. The “Compatible Module” setting for Elec tronic Keying ensures the
database is not installed on your computer. To get the drive rating, use the Create
Database…, or Web Update… button described above.
and minor revision is not available, the drive database is not installed on your computer. To
get the correct database revision, use one of the following buttons at the bottom left of the
Module Definition window:
•Create Database… Creates a database from an online network multi-drive. Clicking
this button displays an RSLinx RSWho window. Browse to the online drive (PowerFlex
525), select it, and click OK. The database will be uploaded and stored on the computer.
Thereafter, close the Module Definition window and then re-open it to display the new
revisio n.
• Web Update… When a drive is not available online, opens the Allen-Bradley Drives
Web Updates web site to download a specific database file. After downloading the file,
close the Module Definition window and then re-open it to display the new revision.
physical module is consistent with the software configuration before the controller and
bridge make a connection. Therefore, ensure that you have set the correct revision in this
window. See the online Help for additional information on this and other Electronic Keying
settings. If keying is not required, select “Disable Keying.” Drives do not require keying, and
so “Disable Keying” is recommended.
On the Module Definition window, notice that the automatically-assigned
controller tags Drive Status, Feedback, Logic Command, and Reference
are always used.
The Velocity/Positioning mode select is in the lower right of the
window when the master PowerFlex 525 drive is selected.
88 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 89

Using Multi-Drive Mode Chapter 7
TIP
6. Click Add to select and define each daisy-chained drive:
You may create a database from a network accessible drive using the
Create Database... button (Recommended).
Box Setting
Name A name to identify an individual drive.
Description Optional – description of an individual drive.
Drive Rating The voltage and current rating of the drive. If the drive rating is not listed, the drive
Revision The major and minor revision of the firmware (database) in the drive. If the drive’s major
Port Por t assig nment for each d rive
Electronic Keying Compatible Module. The “Compatible Module” setting for Elec tronic Keying ensures the
Mode Select Sets the I/O configuration to either Velocity or Position mode.
database is not installed on your computer. To get the drive rating, use the Create
Database…, or Web Update… button described above.
and minor revision is not available, the drive database is not installed on your computer. To
get the correct database revision, use one of the following buttons at the bottom left of the
Module Definition window:
•Create Database… Creates a database from an online network multi-drive. Clicking
this button displays an RSLinx RSWho window. Browse to the online drive (PowerFlex
525), select it, and click OK. The database will be uploaded and stored on the computer.
Thereafter, close the Module Definition window and then re-open it to display the new
revisio n.
• Web Update… When a drive is not available online, opens the Allen-Bradley Drives
Web Updates web site to download a specific database file. After downloading the file,
close the Module Definition window and then re-open it to display the new revision.
physical module is consistent with the software configuration before the controller and
bridge make a connection. Therefore, ensure that you have set the correct revision in this
window. See the online Help for additional information on this and other Electronic Keying
settings. If keying is not required, select “Disable Keying.” Drives do not require keying, and
so “Disable Keying” is recommended.
7. Click OK on the Module Definition window to save the drive
configuration and close the window. The drive’s New Module window
reappears.
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 89
Page 90

Chapter 7 Using Multi-Drive Mode
8. On the New Module window, click the Connection tab.
9. In the “Requested Packet Interval (RPI)” box, set the value to 5.0
milliseconds or greater. This value determines the maximum interval that a
controller should use to move data to and from the adapter. To conserve
bandwidth, use higher values for communicating with low priority devices.
The “Inhibit Module” box, when checked, inhibits the module from
communicating with the RSLogix 5000/Logix Designer project. When
the “Major Fault on …” box is checked, a major controller fault will occur
when the module’s connection fails while the controller is in the Run
Mode. For this example, leave the “Inhibit Module” and “Major Fault On
…” boxes unchecked.
10. Click OK on the New Module window.
The new node (“PowerFlex 525-EENET-Multi PowerFlex_52X_Drive-
Multi” in this example) now appears under the icon in the I/O
Configuration folder. If you double-click on the Input Controller Tag
Controller Input Tags on page 91) and Output Controller Tag
(
Controller Output Tags on page 92), you will see that module-defined
(
data types and tags have been automatically created. Note that all tag
names are defined for each drive. After you save and download the
configuration, these tags allow you to access the Input and Output data of
the drives using the controller’s ladder logic.
90 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 91

Controller Input Tags
Using Multi-Drive Mode Chapter 7
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 91
Page 92

Chapter 7 Using Multi-Drive Mode
Controller Output Tags
92 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 93
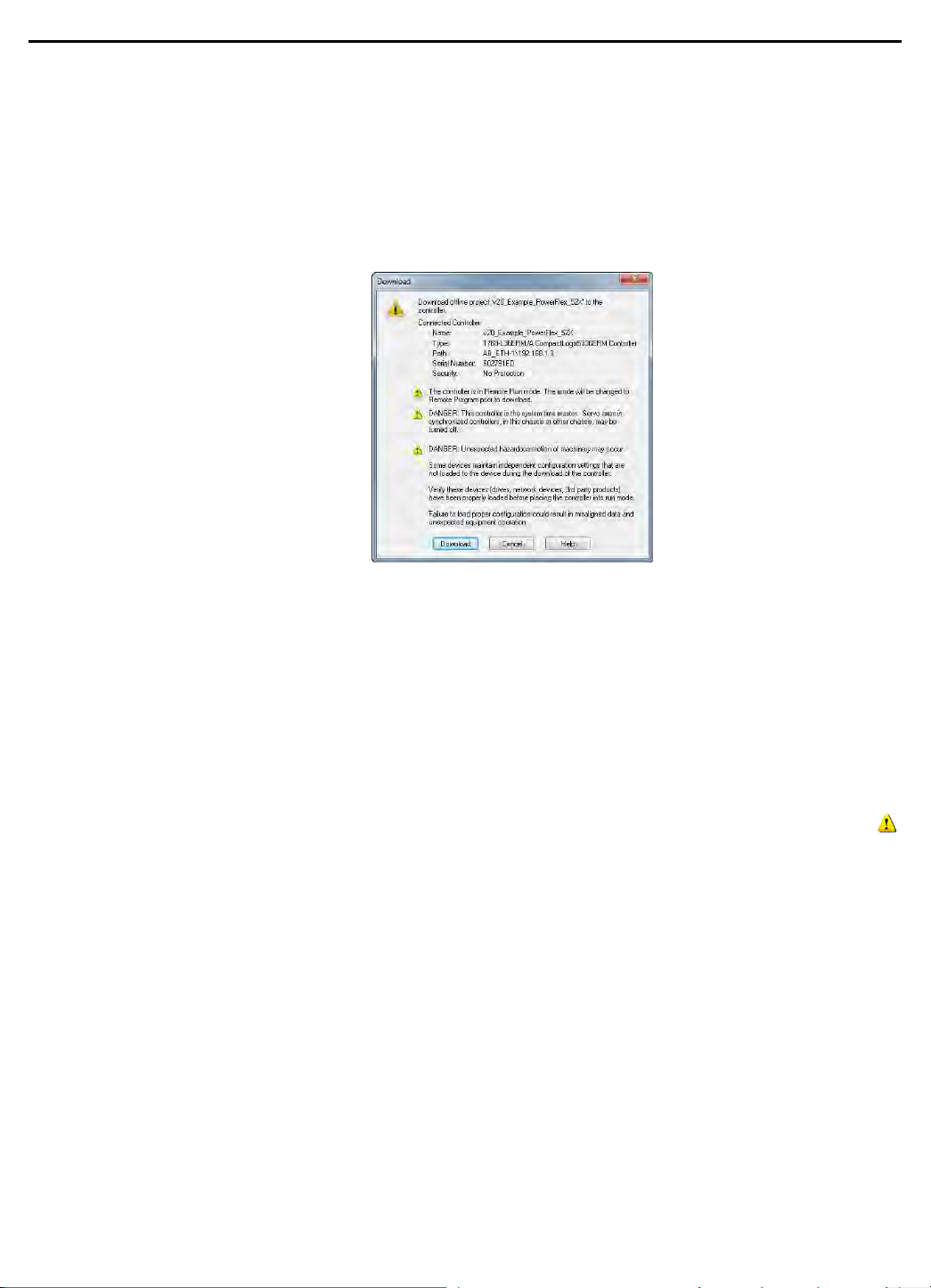
Using Multi-Drive Mode Chapter 7
TIP
Saving the I/O Configuration to the Controller
After adding the controller and drives to the I/O configuration, you must
download the configuration to the controller. You should also save the
configuration to a file on your computer.
1. In the RSLogix 5000/Logix Designer window, select Communications >
Download. The Download dialog box appears.
If a message box reports that RSLogix 5000/Logix Designer is unable to
go online, select Communications > Who Active to find your
controller in the Who Active screen. After finding and selecting the
controller, click Set Project Path to establish the path. If your
controller does not appear, you need to add or configure the EtherNet/
IP driver in RSLinx. See the RSLinx online help.
2. Click Download to download the configuration to the controller. When
the download is successfully completed, RSLogix 5000/Logix Designer
goes into Online Mode and the I/O Not Responding box in the upper-left
of the window should be flashing green. Also, a yellow warning symbol
should be displayed on the I/O Configuration folder in the treeview and
on the drive profile.
3. If the controller was in Run Mode before clicking Download,
RSLogix 5000/Logix Designer prompts you to change the controller
mode back to Remote Run. In this case, choose the appropriate mode for
your application. If the controller was in Program Mode before clicking
Download, this prompt will not appear.
4. Select File > Save. If this is the first time you saved the project, the Save As
dialog box appears. Navigate to a folder, type a file name, and click Save to
save the configuration to a file on your computer.
5. To ensure that the present project configuration values are saved,
RSLogix 5000/Logix Designer prompts you to upload them. Click Ye s to
upload and save them.
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 93
Page 94

Chapter 7 Using Multi-Drive Mode
TIP
Correlating the Drive with the Controller
You must now correlate the drive settings to the RSLogix 5000/Logix Designer
project I/O settings so that they match. This requires loading the project I/O
settings into the drive.
1. In the treeview under I/O Configuration, right-click on the drive profile
(for this example “PowerFlex 525-EENET PowerFlex_52X_Drive”) and
select Properties.
2. Select the Drive tab to begin the correlation process.
After the drive configuration data has been verified, the Drive tab will
display a request to synchronize the configuration with the drive. Click
Upl oad . The correlation process will continue. This may take several
minutes depending on the number and type of daisy-chained drives.
Differences Found Screen on page 95 appears—which is typical,
If the
click Download. This will download the project settings from the
controller to the drives. If Upl oad is clicked, the drive settings are
uploaded to the controller.
On subsequent connections to the drive (after the initial download),
select Upload.
94 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 95

Differences Found Screen
TIP
3. The Drive tab displays a screen of the drive.
Using Multi-Drive Mode Chapter 7
Multi-Drive Ladder Logic
Program for Generic Profile
If the download is successful, the Drive tab will show a green
indicator in the upper right corner of the window. This tab is extremely
useful for configuring drive parameters, accessing start-up wizards and
troubleshooting. Note that there is a tab for the master as well as each of
the daisy-chained drives.
You may now use the automatically generated tags to create your
controller logic.
4. Click OK to close the Module Properties window for the drive.
The following is an example of the ladder logic program for the Generic Profile
and demonstrates using Multi-drive mode with five drives. See
Mode Example for Network on page 82 for an example of a system layout
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 95
Multi-Drive
Page 96

Chapter 7 Using Multi-Drive Mode
diagram. If you have not set-up your drive using the Generic Profile, see
Using the
RSLogix 5000 (version 17.0 or greater) or Logix Designer (version 21.0 or
greater) Generic Profile on page 53 for instructions.
Multi-Drive Example of I/O Image
See
on page 84 for the number of 16-bit
input and output words to use for your application. In this example, the number
of input words is 12 and the number of output words is 10.
Function of the Example Program
The example program provided is for the CompactLogix family, but other Logixbased controllers can also be used similarly. This example program enables you
to:
• View status information from the drives such as Ready, Fault, At Speed,
and Feedback.
• Control the drives using various Logic Command bits (Stop, Start, etc.)
and Reference.
• Perform a single parameter read and write for each drive. The example uses
PowerFlex 4M drive parameter P109 [Accel Time 1] for both so you can
see (read) the change after a write is performed.
The same programming approach can be used with the tags generated by the
Multi-drive Add-On Profile. Note that the tags used in this example will be
different from those created by the Multi-drive Add-On Profile.
Drive 0 (PowerFlex 525) Settings for the Example Program
• Parameter C169 [MultiDrv Sel] is set to 2 “EtherNet/IP”.
• The following parameters are set:
Parameter Value Description
P046 [Start Source1] 5 “EtherNet/IP”
P047 [Speed Reference1] 15 “EtherNet/IP ”
C175 [DSI I/O Cfg] 4 “Drive 0-4” (5 drives on 1 node)
C171 [Drv 1 Addr]
C172 [Drv 2 Addr] 2 Modbus address of Drive 2
C173 [Drv 3 Addr] 3 Modbus address of Drive 3
C174 [Drv 4 Addr] 4 Modbus address of Drive 4
(1) The settings for these parameters must match the node address settings in the respective daisy-chained drives.
(1)
1 Modbus address of Drive 1
96 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 97

Using Multi-Drive Mode Chapter 7
Drive 1...4 (PowerFlex 4M) Settings for the Example Program
The following parameters are set:
Value
Parameter Drive 1 Drive 2 Drive 3 Drive 4
P106 [Start Source] 5555
P108 [Speed Reference] 5 5 5 5
C302 [Comm D ata Rate] 4 4 4 4
C303 [Comm Node Addr] 1 2 3 4
C304 [Co mm Loss Acti on] 0 0 0 0
C305 [Comm Loss Time] 5.0 s 5.0 s 5.0 s 5.0 s
C306 [Co mm Format] 0 0 0 0
CompactLogix Example Using
Generic Profile
The following common Tags are used:
Tag Name Type Description
PowerFlex_52X_Drive_Multi_Generic:O AB:ETHERNET_MODULE_xxx:O:0 Generic EtherNet/IP
PowerFlex_52X_Drive_Multi_Generic:I AB:ETHERNET_MODULE_xxx:I:0
PowerFlex_52X_Drive_Multi_Generic:C AB:ETHERNET_MODULE:C:0
Accel_Time_1 INT –
Drive_Input_Image INT [12] Input Image Table
Drive_Output_Image INT [10] O utput Image Table
module I/O tags and
configuration
The following Tags are used for Drive 0:
Tag Name Type Description
Drive_0_Command_Stop BOOL Logic Command bit 0 (STOP)
Drive_0_Command_Start BOOL Logic Command bit 1 (START)
Drive_0_Command_Jog BOOL Logic Command bit 2 (JOG)
Drive_0_Command_Clear_Faults BOOL Logic Command bit 3 (CLEAR FAULTS)
Drive_0_Command_Forward BOOL Logic Command bit 4 (FORWARD)
Drive_0_Reference INT Speed Reference
Drive_0_Status_Ready B OOL Logic Status bit 0 (READY)
Drive_0_Status_Active BOOL Logic Status bit 1 (ACTIVE)
Drive_0_Status_Forward BOOL Logic Status bit 2 (FORWARD)
Drive_0_S tatus_Faulted BOOL Logic Status bit 7 (FAULT)
Drive_0_Status_At_Reference BOOL Logic Status bit 8 (AT SPEED)
Drive_0_Feedback INT Speed Feedback
Perform_Parameter_Read_0 BOOL Initiates the parameter read
Parameter_RD_Value_0 INT Read value of the para meter
Parameter_RD_Message_0 MESSAGE Get_Attribute_Single (Read)
Perform_Parameter_Write_0 BOOL Initiates the parameter value
Parameter_WR_Value_0 IN T Write value to the p arameter
Parameter_WR_Message_0 MESSAGE Set_Attritbute_Single (Write)
The same type of Tags are also used for Drive 1 through Drive 4.
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 97
Page 98

Chapter 7 Using Multi-Drive Mode
PowerFlex 525 EtherNet/IP Multi-Drive Demo
Main Routine
The Main Routine reads the network Input Image from the scanner, calls the
various drive control subroutines, and writes the network Output Image to the
scanner. See
Main Routine
0
Main Routine on page 98.
CompactLogix EtherNet/IP Multi-Drive example program with a PowerFlex 525 on EtherNet/IP.
Four PowerFlex 4M drives are daisy-chained to the main PowerFlex 525 using their RJ45 ports (RS-485). I n this mode,
up to five PowerFlex drives can exist on one EtherNet/IP node.
This rung retrieves the Logic Status and Feedback data for all five drives from the scanner (DINTs), and moves it to
specific INT tags for use elsewhere in the ladder program. The input image is as follows:
Drive_Input_Image[2] and Drive_Input_Image[3] = Drive 0 Logic Status and Feedback
Drive_Input_Image[4] and Drive_Input_Image[5] = Drive 1 Logic Status and Feedback
Drive_Input_Image[6] and Drive_Input_Image[7] = Drive 2 Logic Status and Feedback
Drive_Input_Image[8] and Drive_Input_Image[9] = Drive 3 Logic Status and Feedback
Drive_Input_Image[10] and Drive_Input_Image[11] = Drive 4 Logic Status and Feedback
Copy File
PowerFlex_52X_Drive_Multi_Generic:I.Data [0]
Source
Dest
Length
COP
Drive_Input_Image[0]
12
Drive 0 control subroutine.
1
Drive 1 control subroutine.
2
Drive 2 control subroutine.
3
Drive 3 control subroutine.
4
Drive 4 control subroutine.
5
This rung writes the output image to the scanner. The output image is as follows:
Drive_Output_Image[0] and Drive_Output_Image[1] = Drive 0 Logic Command and Reference
Drive_Output_Image[2] and Drive_Output_Image[3] = Drive 0 Logic Command and Reference
Drive_Output_Image[4] and Drive_Output_Image[5] = Drive 0 Logic Command and Reference
Drive_Output_Image[6] and Drive_Output_Image[7] = Drive 0 Logic Command and Reference
Drive_Output_Image[8] and Drive_Output_Image[9] = Drive 0 Logic Command and Reference
6
Copy File
Source
PowerFlex_52X_Drive_Multi_Generic:O.Data[0]
Dest
Length
Jump To Subroutine
Routine Name Drive0
Jump To Subroutine
Routine Name Drive1
Jump To Subroutine
Routine Name Drive2
Jump To Subroutine
Routine Name Drive3
Jump To Subroutine
Routine Name Drive4
COP
JSR
JSR
JSR
JSR
JSR
Drive_Output_Image[0]
10
(End)
98 Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013
Page 99

Using Multi-Drive Mode Chapter 7
Drive 0...4 Control Routines
The following Drive Control routines provide status information (Logic Status
and Feedback), control (Logic Command and Reference), and parameter read/
write for each of the respective drives:
Control Routine See page...
Drive 0
Drive 1 101
Drive 2 102
Drive 3 103
Drive 4 104
100
Rockwell Automation Publication 520COM-UM001A-EN-E - February 2013 99
Page 100

Chapter 7 Using Multi-Drive Mode
Explicit Messaging Example
Drive 0 Control Subroutine
Drive 0 Control Routine
This section takes the data from the input area and moves it to specific tags (Logic Status bits and Feedback) for use
elsewhere in the ladder program.
Drive_Input_Image[2].0 Drive_0_Status_Ready
0
Drive_Input_Image[2].1 Drive_0_Status_Active
1
Drive_Input_Image[2].3 Drive_0_Status_Forward
2
Drive_Input_Image[2].7 Drive_0_Status_Faulted
3
Drive_Input_Image[2].8 Drive_0_Status_At_Reference
4
5
This section takes the data from specific tags (Logic Command bits and Reference) and moves them to the output
image area for transmission to the scanner.
Drive_0_Command_Stop Drive_Output_Image[0].0
6
Drive_0_Command_Start Drive_Output_Image[0].1
7
Drive_0_Command_Jog Drive_Output_Image[0].2
8
Drive_0_Command_Clear_Faults Drive_Output_Image[0].3
9
Drive_0_Command_Forward Drive_Output_Image[0].4
10
Drive_0_Command_Forward Drive_Output_Image[0].5
11
Copy File
Source
Dest
Length
COP
Drive_Input_Image[1]
Drive_0_Feedback
1
12
Drive 0 parameters are accessed by referencing the desired parameter number. For example, to access parameter P041
an Instance of 41 is used.
Perform_Parameter_Read_0
13
Perform_Parameter_Write_0
14
15
(End)
Message
Message Control Parameter_RD_Message_0
Message
Message Control Parameter_WR_Message_0
100 Rockwell Automation Publication 520COM-U M001A-EN-E - February 2013
Copy File
Source
Dest
Length
MSG
MSG
COP
Drive_0_Reference
Drive_Output_Image[1]
RET
Return from Subroutine
1
EN
DN
ER
EN
DN
ER
 Loading...
Loading...