

Allen-Bradley 22C-B065A103, 22C-B017N103, 22C-B024N103, 22C-B049A103, 22C-B075A103 User Manual
...Page 1

User Manual
Original Instructions
PowerFlex 400 Adjustable Frequency AC Drive for Fan
& Pump Applications
Catalog Numbers 22C, Series B
Page 2

Important User Information
Read this document and the documents listed in the additional resources section about installation, configuration, and
operation of this equipment before you install, configure, operate, or maintain this product. Users are required to
familiarize themselves with installation and wiring instructions in addition to requirements of all applicable codes, laws,
and standards.
Activities including installation, adjustments, putting into service, use, assembly, disassembly, and maintenance are
required to be carried out by suitably trained personnel in accordance with applicable code of practice.
If this equipment is used in a manner not specified by the manufacturer, the protection provided by the equipment may
be impaired.
In no event will Rockwell Automation, Inc. be responsible or liable for indirect or consequential damages resulting from
the use or application of this equipment.
The examples and diagrams in this manual are included solely for illustrative purposes. Because of the many variables and
requirements associated with any particular installation, Rockwell Automation, Inc. cannot assume responsibility or
liability for actual use based on the examples and diagrams.
No patent liability is assumed by Rockwell Automation, Inc. with respect to use of information, circuits, equipment, or
software described in this manual.
Reproduction of the contents of this manual, in whole or in part, without written permission of Rockwell Automation,
Inc., is prohibited
Throughout this manual, when necessary, we use notes to make you aware of safety considerations.
WARNING: Identifies information about practices or circumstances that can cause an explosion in a hazardous
environment, which may lead to personal injury or death, property damage, or economic loss.
ATTENTION: Identifies information about practices or circumstances that can lead to personal injury or death, property
damage, or economic loss. Attentions help you identify a hazard, avoid a hazard, and recognize the consequence.
IMPORTANT Identifies information that is critical for successful application and understanding of the product.
Labels may also be on or inside the equipment to provide specific precautions.
SHOCK HAZARD: Labels may be on or inside the equipment, for example, a drive or motor, to alert people that dangerous
voltage may be present.
BURN HAZARD: Labels may be on or inside the equipment, for example, a drive or motor, to alert people that surfaces may
reach dangerous temperatures.
ARC FLASH HAZARD: Labels may be on or inside the equipment, for example, a motor control center, to alert people to
potential Arc Flash. Arc Flash will cause severe injury or death. Wear proper Personal Protective Equipment (PPE). Follow ALL
Regulatory requirements for safe work practices and for Personal Protective Equipment (PPE).
Page 3

Table of Contents
Important User Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
Summary of Changes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5
Preface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7
Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Who Should Use This Manual? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Additional Resources . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Manual Conventions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Drive Frame Sizes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
General Precautions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Catalog Number Explanation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Chapter 1
Installation/Wiring Opening the Cover . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Frame C Drives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Frame D Drives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Frame E Drives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Frame F Drives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Frame G Drives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Frame H Drives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Mounting Considerations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Maximum Surrounding Air Temperature. . . . . . . . . . . . . . . . . . . . 15
Minimum Mounting Clearances. . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Debris Protection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Storage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
AC Supply Source Considerations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Ungrounded Distribution Systems. . . . . . . . . . . . . . . . . . . . . . . . . . 18
Input Power Conditioning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
General Grounding Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Ground Fault Monitoring. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Safety Ground - (PE) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Motor Ground . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Shield Termination - SHLD. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
RFI Filter Grounding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Fuses and Circuit Breakers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Fusing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Bulletin 140M (Self-Protected Combination Controller)/UL489
Circuit Breakers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Power Wiring. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Motor Cable Types Acceptable for 200...600 Volt Installations 23
Reflected Wave Protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Output Disconnect . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Power Terminal Block . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
I/O Wiring Recommendations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Motor Start/Stop Precautions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 1
Page 4

Table of Contents
Control Wire Types . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
I/O Terminal Block . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Maximum Control Wire Recommendations. . . . . . . . . . . . . . . . . 29
I/O Wiring Examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Typical Multiple Drive Connection Examples . . . . . . . . . . . . . . . 36
Start and Speed Reference Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Accel/Decel Selection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
RS485 Network Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
On Drive Connections. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
EMC Instructions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
CE Conformity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Low Voltage Directive (2014/35/EU). . . . . . . . . . . . . . . . . . . . . . . 39
EMC Directive (2014/30/EU) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
General Notes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Essential Requirements for CE Compliance. . . . . . . . . . . . . . . . . . 40
FCC Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
FCC Compliance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Essential Requirements for FCC Compliance . . . . . . . . . . . . . . . . 42
Chapter 2
Start Up Prepare For Drive Start-Up . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Before Applying Power to the Drive. . . . . . . . . . . . . . . . . . . . . . . . . 45
Applying Power to the Drive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Start, Stop, Direction and Speed Control . . . . . . . . . . . . . . . . . . . . 46
Integral Keypad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Operator Keys. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
LED Status Indicators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
LCD Display. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Viewing and Editing Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Keypad Hand-Off-Auto Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Hand-Off-Auto Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Local/Remote Mode. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Auto/Manual Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
No Function Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Chapter 3
Programming and Parameters About Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Parameter Organization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
Basic Display Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Basic Program Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Terminal Block Group. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
Communications Group. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Advanced Program Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
Aux Relay Card Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
Advanced Display Group . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
Parameter Cross Reference by Name . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
2 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 5
Table of Contents
Chapter 4
Troubleshooting Drive Status . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
LED Indications. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
Faults . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
Manually Clearing Faults. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
Auto Restart (Reset/Run) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
Fault Descriptions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
Common Symptoms and Corrective Actions . . . . . . . . . . . . . . . . . . . 117
Motor does not Start. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
Drive does not Start from Start or Run Inputs wired to the
terminal block. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
Drive does not Start from Integral Keypad. . . . . . . . . . . . . . . . . . 118
Motor and/or drive will not accelerate to commanded speed.. 119
Motor operation is unstable.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
Drive will not reverse motor direction. . . . . . . . . . . . . . . . . . . . . . 119
Drive does not power up.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
Appendix A
Supplemental Drive Information Drive, Fuse & Circuit Breaker Ratings . . . . . . . . . . . . . . . . . . . . . . . . . 121
Fusing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
Circuit Breakers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
PowerFlex 400 Watts Loss (Rated Load, Speed & PWM) . . . . 127
Input Power Connections. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
Appendix B
Accessories and Dimensions Product Selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
Product Dimensions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
Appendix C
RJ45 DSI Splitter Cable Connectivity Guidelines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
DSI Cable Accessories . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
Connectivity Examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
Appendix D
Application Notes Damper Control Setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
PID Setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
PID Control Loop. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
Exclusive Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
Trim Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
PID Reference and Feedback . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
Analog PID Reference Signals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
PID Deadband . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
PID Preload. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
PID Limits. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 3
Page 6

Table of Contents
PID Gains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
Guidelines for Adjusting the PID Gains . . . . . . . . . . . . . . . . . . . . 163
Auxiliary Motor Control Setup. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
Appendix E
Modbus RTU Protocol Network Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169
Parameter Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 170
Supported Modbus Function Codes . . . . . . . . . . . . . . . . . . . . . . . . . . . 170
Writing (06) Logic Command Data . . . . . . . . . . . . . . . . . . . . . . . . . . . 170
Writing (06) Reference . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
Reading (03) Logic Status Data. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
Reading (03) Feedback . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
Reading (03) Drive Error Codes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
Reading (03) and Writing (06) Drive Parameters . . . . . . . . . . . . . . . 173
Additional Information. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
Appendix F
Metasys N2 Understanding Metasys N2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
Metasys N2 Virtual Objects . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
Metasys N2 Data Types . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176
Network Points . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
Using Percent (%) for the Reference . . . . . . . . . . . . . . . . . . . . . . . . . . . 180
Using Metasys Configurable Objects to Access Parameters. . . . . . . 181
Reading Parameter Values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181
Writing Parameter Values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182
Appendix G
P1 – Floor Level Network (FLN) Understanding P1-FLN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
P1-FLN Points . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
Network Points . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184
Using Percent (%) for the Reference . . . . . . . . . . . . . . . . . . . . . . . . . . . 188
Using P1 Configurable Points to Access Parameters . . . . . . . . . . . . . 188
Reading Parameter Values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 188
Writing Parameter Values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189
Index . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191
4 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 7

Summary of Changes
This manual contains new and updated information as indicated in the
following table.
Top ic Pag e
CE Conformity updated 39
Programming options updated 55
UL and CE certification updated 123
Internal DC Bus Choke specification for 380-480V AC Input updated
from "18.5-160 kW (25-250 HP)" to "11-160 kW (15-250 HP)".
Connected Components Workbench and DriveExecutive software
compatibility updated
New Parameters
No new parameters have been added with the release of Firmware Release
Number (FRN) 8.xx.
124
134
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 5
Page 8

Summary of Changes
Notes:
6 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 9
Preface
Overview
Who Should Use This Manual?
Additional Resources
The purpose of this manual is to provide you with the basic information
needed to install, start-up and troubleshoot the PowerFlex 400 Adjustable
Frequency AC Drive.
This manual is intended for qualified personnel. You must be able to program
and operate Adjustable Frequency AC Drive devices. In addition, you must
have an understanding of the parameter settings and functions.
These documents contain additional information concerning related products
from Rockwell Automation.
Resource Description
Wiring and Grounding Guidelines for Pulse Width
Modulated (PWM) AC Drives, publication DRIVES-IN001
Preventive Maintenance of Industrial Control and Drive
System Equipment, publication DRIVES-TD001
Safety Guidelines for the Application, Installation, and
Maintenance of Solid-State Control, publication SGI-1.1
Industrial Automation Wiring and Grounding Guidelines,
publication 1770-4.1
Product Certifications website, http://
www.rockwellautomation.com/global/certification/
overview.page
Provides basic information to install, protect, wire,
and ground pulse width modulated (PWM) AC drives.
Provides a checklist as a guide in performing
preventive maintenance.
Provide general guidelines for the application,
installation, and maintenance of solid-state control in
the form of individual devices or packaged assemblies
incorporating solid-state components.
Provides general guidelines for installing a Rockwell
Automation industrial system.
Provides declarations of conformity, certificates, and
other certification details.
You can view or download publications at
http://www.rockwellautomation.com/global/literature-library/overview.page.
To order paper copies of technical documentation, contact your local
Allen-Bradley distributor or Rockwell Automation sales representative.
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 7
Page 10

Preface
Manual Conventions
• In this manual we refer to the PowerFlex 400 Adjustable Frequency AC
Drive as; drive, PowerFlex 400 or PowerFlex 400 Drive.
• Parameter numbers and names are shown in this format:
P031 [Motor NP Volts]
Name
Number
Group
b = Basic Display Group
P = Basic Program Group
T = Terminal Block Group
C = Communications Group
A = Advanced Program Group
R = Aux Relay Card Group
d = Advanced Display Group
• The following words are used throughout the manual to describe an
action:
Word Mean ing
Can Possible, able to do something
Cannot Not possible, not able to do something
May Permitted, allowed
Must Unavoidable, you must do this
Shall Required and necessary
Should Recommended
Should Not Not Recommended
Drive Frame Sizes
Similar PowerFlex 400 drive sizes are grouped into frame sizes to simplify spare
parts ordering, dimensioning, etc. A cross reference of drive catalog numbers
and their respective frame sizes is provided in Appendix B
8 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
.
Page 11
Preface
General Precautions
ATT EN TI ON : To avoid an electric shock hazard, verify that the voltage on the
bus capacitors has discharged before performing any work on the drive.
Measure the DC bus voltage at the –DC and +DC terminals or at the –DC and
P2 terminals on the Power Terminal Block (refer to Chapter 1
Power Terminal
descriptions). The voltage must be zero.
A darkened LCD display and LEDs is not an indication that capacitors have
discharged to safe voltage levels.
ATT EN TI ON : Only qualified personnel familiar with adjustable frequency AC
drives and associated machinery should plan or implement the installation,
start-up and subsequent maintenance of the system. Failure to comply may
result in personal injury and/or equipment damage.
ATT EN TI ON : This drive contains ESD (Electrostatic Discharge) sensitive parts
and assemblies. Static control precautions are required when installing,
testing, servicing or repairing this assembly. Component damage may result
if ESD control procedures are not followed. If you are not familiar with static
control procedures, reference A-B publication 8000-4.5.2, “Guarding Against
Electrostatic Damage” or any other applicable ESD protection handbook.
ATT EN TI ON : An incorrectly applied or installed drive can result in
component damage or a reduction in product life. Wiring or application
errors, such as, undersizing the motor, incorrect or inadequate AC supply, or
excessive ambient temperatures may result in malfunction of the system.
ATT EN TI ON : The bus regulator function is extremely useful for preventing
nuisance overvoltage faults resulting from aggressive decelerations,
overhauling loads, and eccentric loads. However, it can also cause either of
the following two conditions to occur.
1. Fast positive changes in input voltage or imbalanced input voltages can cause
uncommanded positive speed changes;
2. Actual deceleration times can be longer than commanded deceleration times
However, a “Stall Fault” is generated if the drive remains in this state for 1
minute. If this condition is unacceptable, the bus regulator must be disabled
(see parameter A187
).
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 9
Page 12
Preface
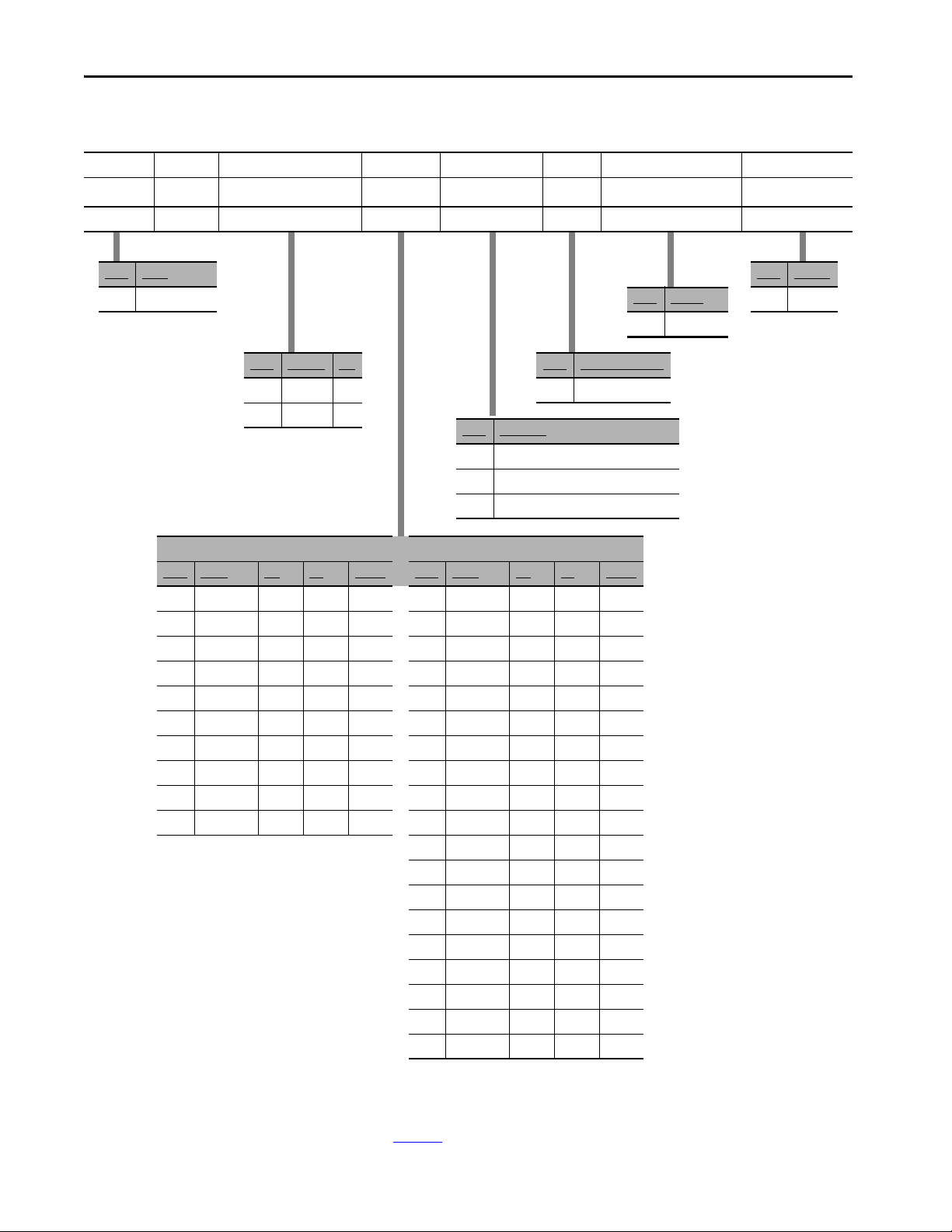
1-3 4 5 6-8 9 10 11 12
22C – D 038 A 1 0 3
Drive Dash Voltage Rating Rating Enclosure HIM Emission Class Comm Slot
Code Drive
22C PowerFlex 400
Code Voltage Ph.
B 240V AC 3
D 480V AC 3
Output Current @ 200...240V 60Hz Input Output Current @ 380...480V Input
Code Amps kW HP Frame Code Amps kW HP Frame
012 12 2.2 3.0 C 6P0 6.0 2.2 3.0 C
017 17.5 3.7 5.0 C 010 10.5 4.0 5.0 C
024 24 5.5 7.5 C 012 12 5.5 7.5 C
033 33 7.5 10 C 017 17 7.5 10 C
04949 1115D 02222 1115C
06565 1520D 03030 1520C
075 75 18.5 25 D 038 38 18.5 25 D
09090 2230D 04545.5 2230D
120 120 30 40 E 060 60 30 40 D
145 145 37 50 E 072 72 37 50 E
088 88 45 60 E
105 105 55 75 E
142 142 75 100 E
170 170 90 125 F
208 208 110 150 F
260 260 132 200 G
310 310 160 250 G
370 370 200 300 H
460 460 250 350 H
Code Enclosure
N Panel Mount - IP20/UL Open-Type
(1)
A Panel Mount - IP30/NEMA 1/UL Type 1
(2)
F Flange Mount - IP20/UL Open Type
(3)
Code Interface Module
1 Fixed Keypad
Code Rating
0 Not Filtered
Code Versi on
3RS485
(1) Frame C drives only available with IP20/UL Open-Type enclosure. Field installed conversion kit available to achieve IP30/NEMA 1/UL Type 1 rating.
(2) Frame D, E, F, G and H drives only available with IP30/NEMA 1/UL Type 1 enclosure.
(3) Frame C drives only.
Additional accessories, options and adapters are available. See Appendix B for details.
Catalog Number Explanation
10 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 13
Installation/Wiring
This chapter provides information on mounting and wiring the
PowerFlex 400 Drive.
For information on... See page
Opening the Cover 12
Mounting Considerations 15
AC Supply Source Considerations 18
General Grounding Requirements 19
Fuses a nd Circuit Breakers 21
Power Wiring 22
I/O Wiring Recommendations 28
Start and Speed Reference Control 37
RS485 Network Wiring 38
EMC Instructions 39
FCC Instructions 42
Chapter 1
Most start-up difficulties are the result of incorrect wiring. Every precaution
must be taken to assure that the wiring is done as instructed. All items must be
read and understood before the actual installation begins.
ATT EN TI ON : The following information is merely a guide for proper
installation. Rockwell Automation, Inc. cannot assume responsibility for the
compliance or the noncompliance to any code, national, local or otherwise
for the proper installation of this drive or associated equipment. A hazard of
personal injury and/or equipment damage exists if codes are ignored during
installation.
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 11
Page 14
Chapter 1 Installation/Wiring
Opening the Cover
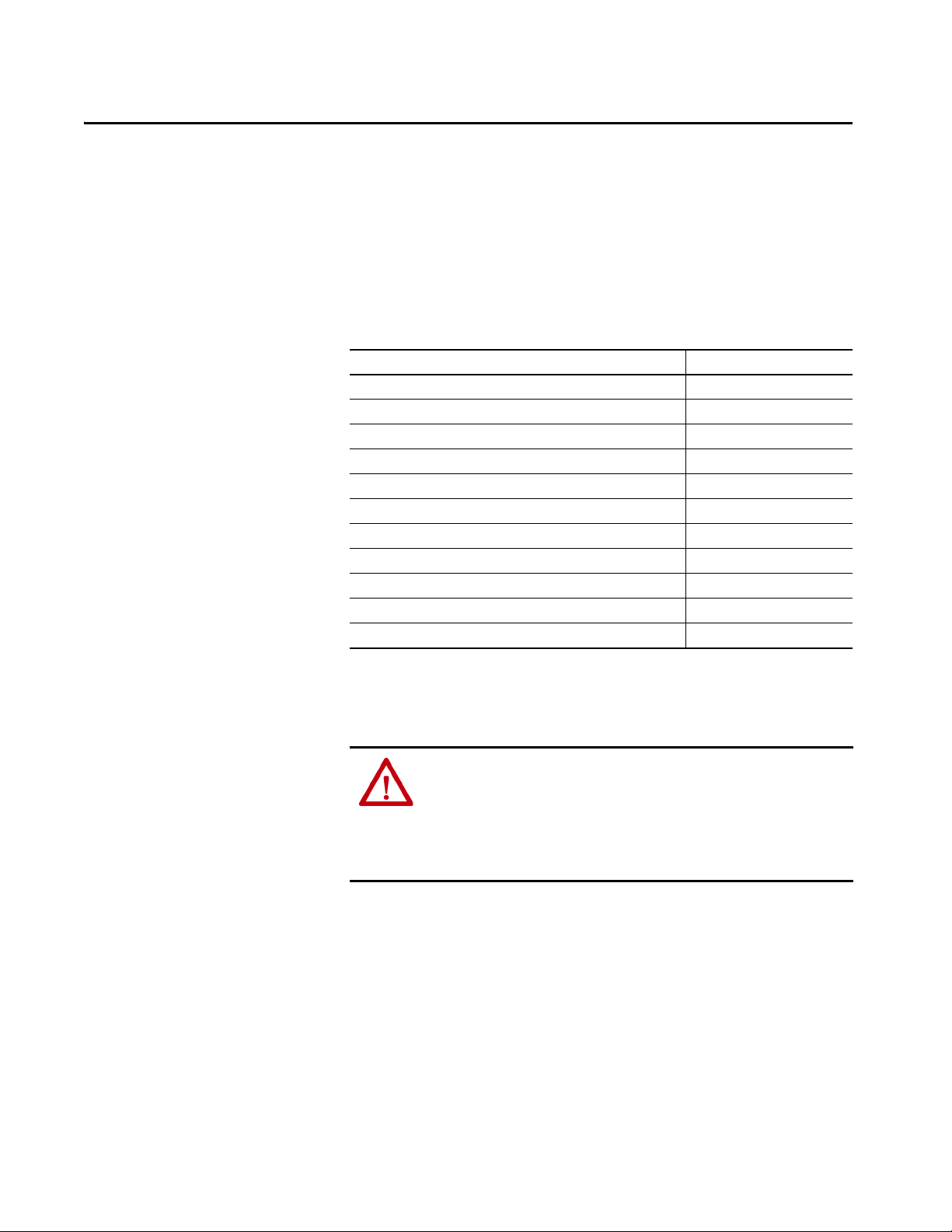
Frame C Drives
1. Press and hold in the tabs on each side of the cover.
2. Pull the cover out and up to release.
Frame D Drives
1. Loosen the two captive cover screws.
2. Pull the bottom of the cover out and up to release.
12 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 15
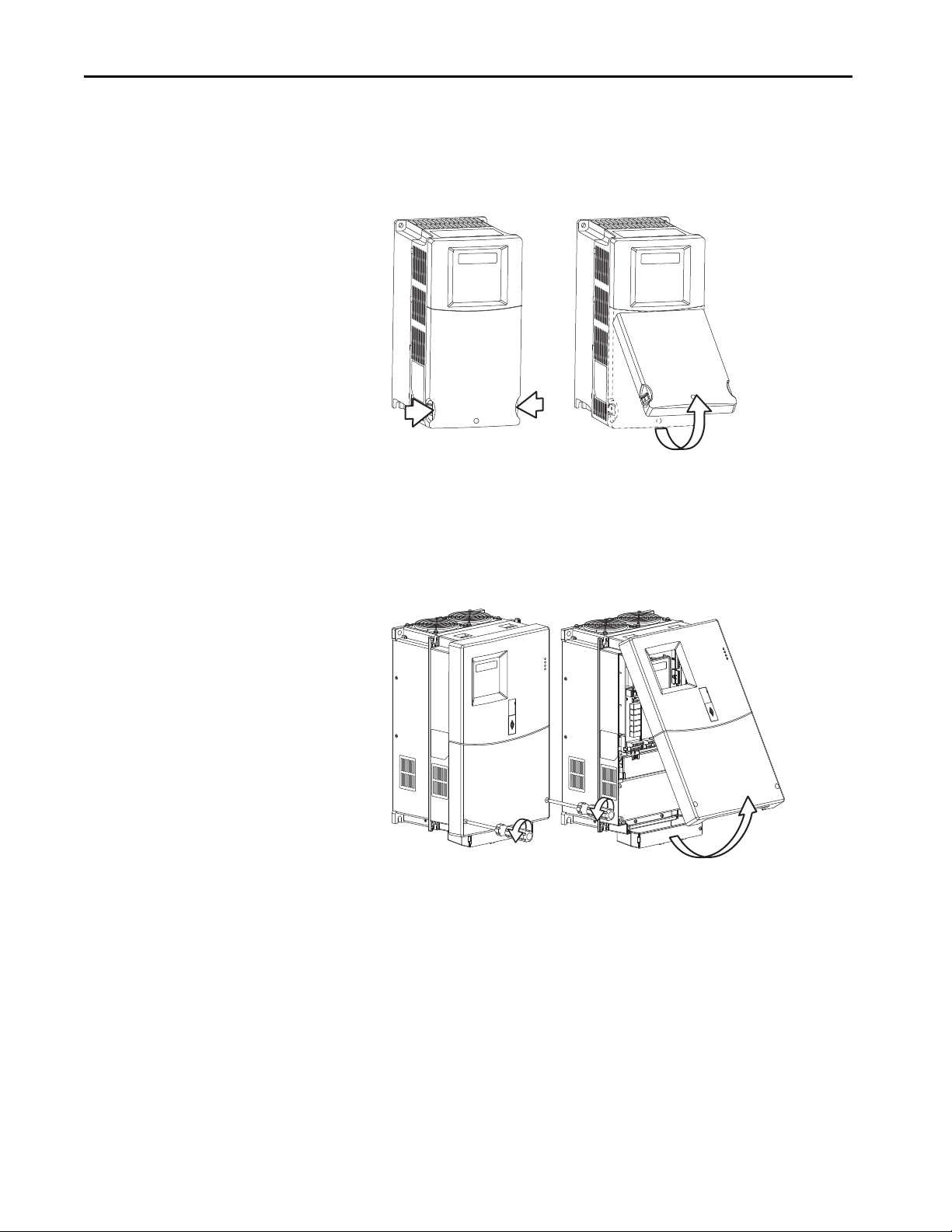
Frame E Drives
1. Loosen the four captive cover screws.
2. Pull the bottom of the cover out and up to release.
Installation/Wiring Chapter 1
Frame F Drives
1. Turn the latch counterclockwise.
2. Pull on the latch to swing the door open.
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 13
Page 16
Chapter 1 Installation/Wiring
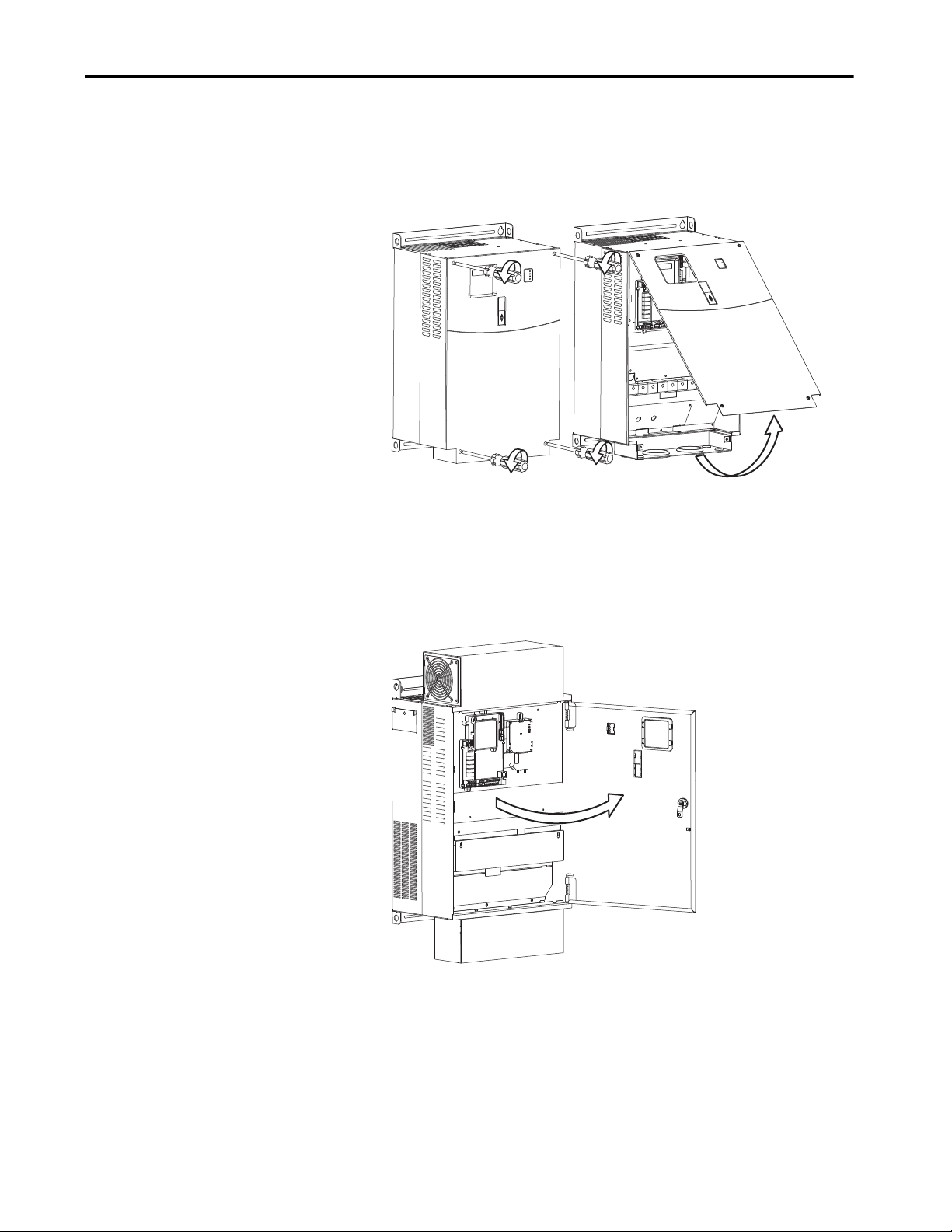
Frame G Drives
1. 1. Loosen the four captive cover screws.
2. Pull the bottom of the cover out and up to release.
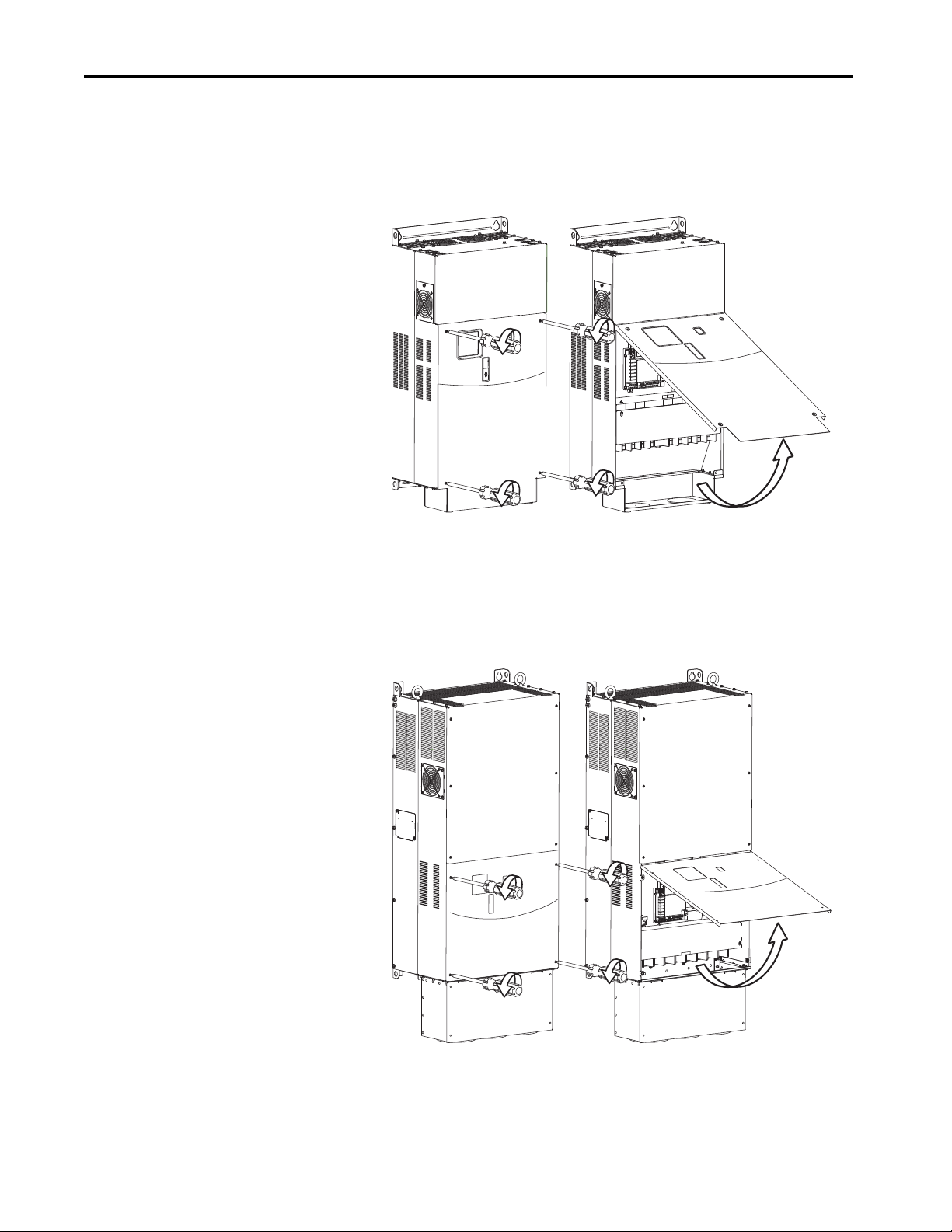
Frame H Drives
1. Loosen the four captive cover screws.
2. Pull the bottom of the cover out and up to release.
14 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 17
Installation/Wiring Chapter 1
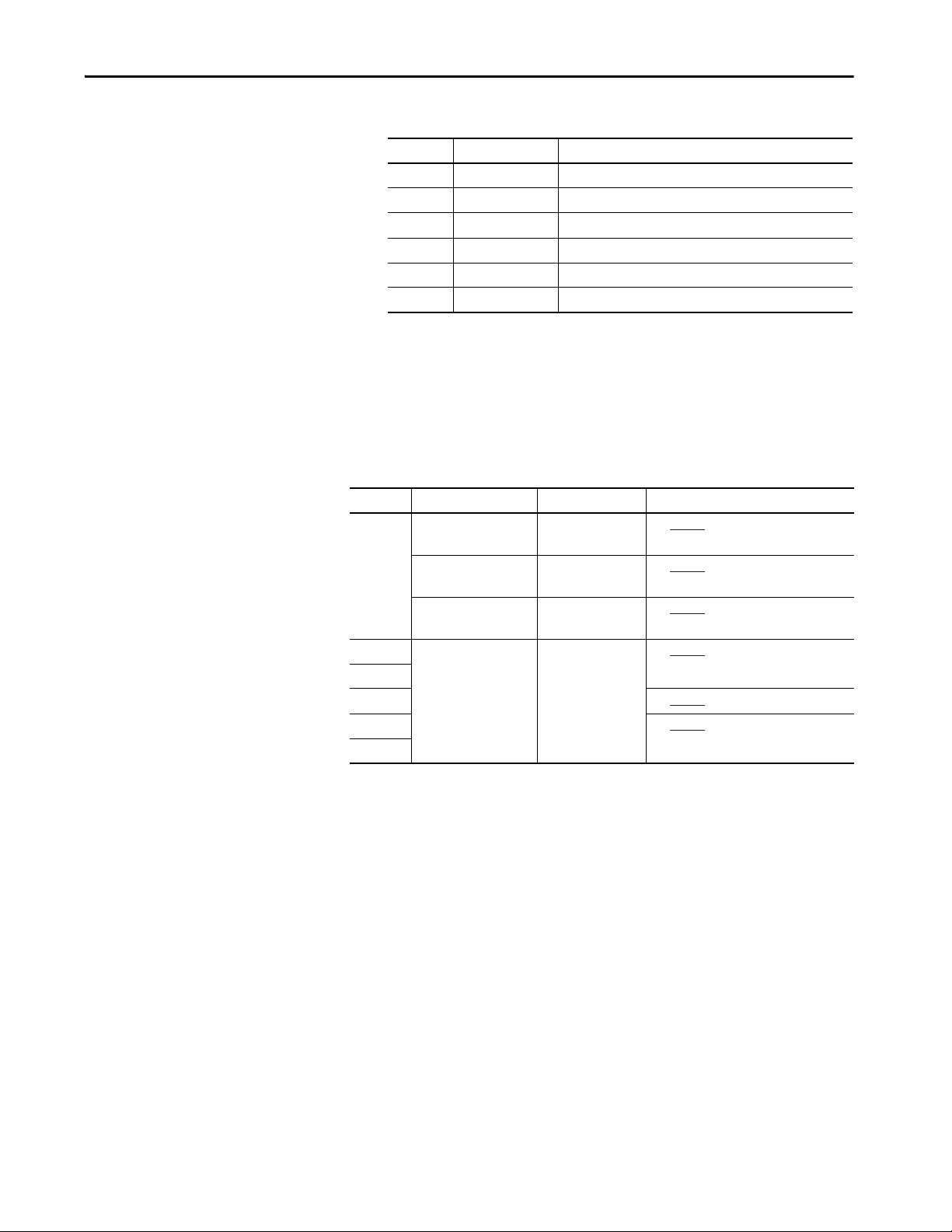
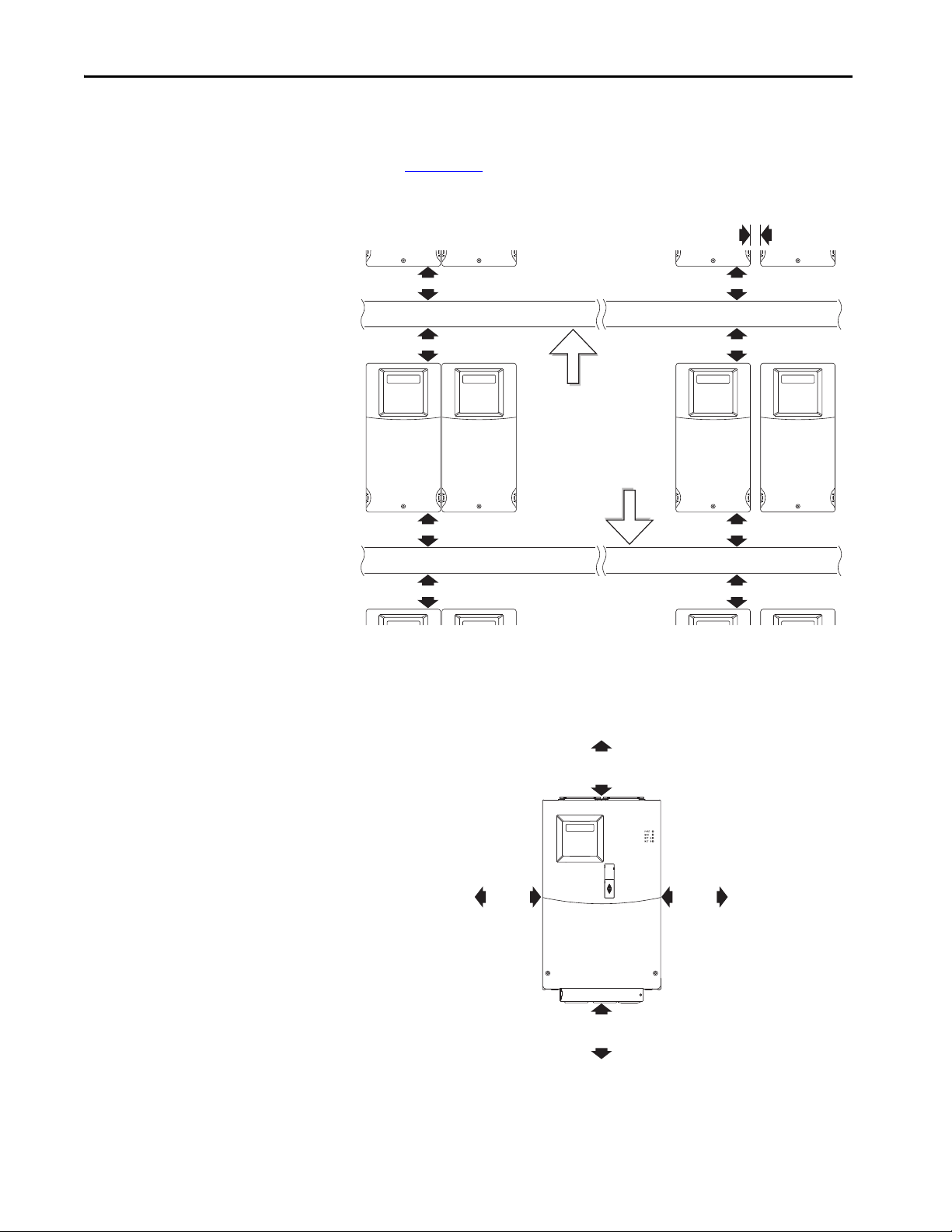
Mounting Considerations
• Mount the drive upright on a flat, vertical and level surface.
Frame Screw Size Screw Torque
C M5 (#10-24) 2.45-2.94 N-m (22-26 lb.-in.)
D M8 (5/16 in.) 6.0-7.4 N-m (53.2-65.0 lb.-in.)
E M8 (5/16 in.) 8.8-10.8 N-m (78.0-95.3 lb.-in.)
F M10 (3/8 in.) 19.6-23.5 N-m (173.6-208.3 lb.-in.)
G M12 (1/2 in.) 33.5-41.0 N-m (296.5-362.9 lb.-in.)
H M12 (1/2 in.) 33.5-41.0 N-m (296.5-362.9 lb.-in.)
• Protect the cooling fan by avoiding dust or metallic particles.
• Do not expose to a corrosive atmosphere.
• Protect from moisture and direct sunlight.
Maximum Surrounding Air Temperature
Frame Enclosure Rating Temperature Range Minimum Mounting Clearances
C IP 20/UL Open-Type -10° to 45°C
(14° to 113°F)
IP 30/NEMA 1/UL Type 1
IP 20/UL Open-Type -10° to 50°C
D IP 30/NEMA 1/UL Type 1 -10° to 45°C
E
FSee Figure 3
GSee Fi gure 4
H
(1) Frame C drives require installation of the PowerFlex 400 IP 30/NEMA 1/UL Type 1 option kit to achieve this rating.
(1)
-10° to 45°C
(14° to 113°F)
(14° to 122°F)
(14° to 113°F)
See Figure 1
See Figure 1, Mounting Option B
See Figure 1, Mounting Option B
See Figure 2
, Mounting Option A
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 15
Page 18
Chapter 1 Installation/Wiring
120 mm
(4.7 in.)
120 mm
(4.7 in.)
25 mm
(1.0 in.)
120 mm
(4.7 in.)
120 mm
(4.7 in.)
120 mm
(4.7 in.)
120 mm
(4.7 in.)
120 mm
(4.7 in.)
120 mm
(4.7 in.)
Closest object that may
restrict air flow
through the drive heat
sink and chassis.
Mounting Option A
No clearance required
between drives.
Mounting Option B
150 mm
(6.0 in.)
150 mm
(6.0 in.)
50 mm
(2.0 in.)
50 mm
(2.0 in.)
Minimum Mounting Clearances
Refer to Appendix B for mounting dimensions.
Figure 1 - Frame C Mounting Clearances
Figure 2 - Frames D & E Mounting Clearances
16 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 19
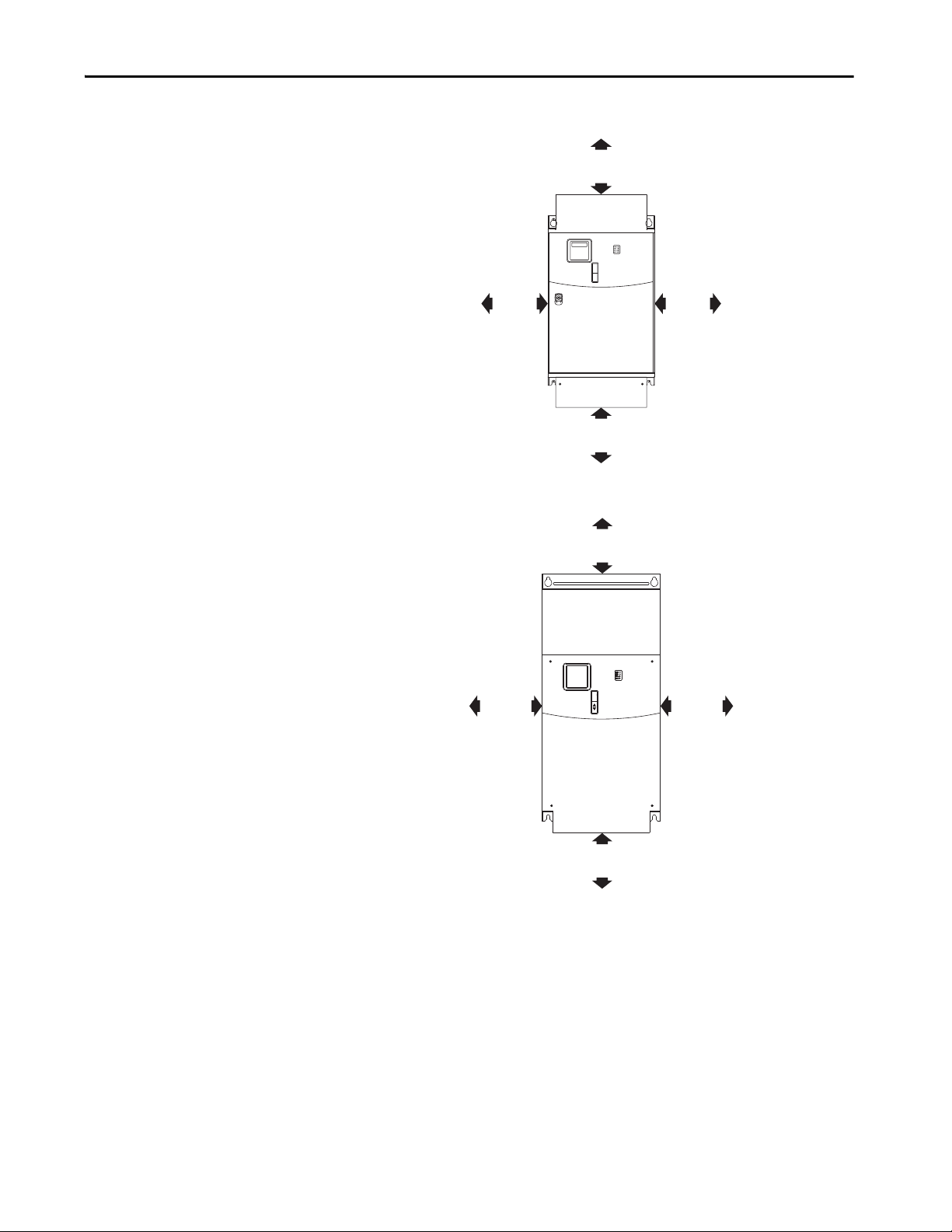
Figure 3 - Frame F Mounting Clearances
300 mm
(11.8 in.)
300 mm
(11.8 in.)
200 mm
(1)
(7.9 in.)
200 mm
(1)
(7.9 in.)
(1)
(1) If the drive is installed with a side gap of 200 mm, it has to be removed from the shelf to change the fan. If the drive
is installed with a side gap of 300 mm, it does not need to be removed from the shelf to change the fan.
Installation/Wiring Chapter 1
250 mm
(9.8 in.)
50 mm
(2.0 in.)
Figure 4 - Frames G & H Mounting Clearances
50 mm
(2.0 in.)
150 mm
(6.0 in.)
Debris Protection
Frame C Drives – A plastic top panel is included with the drive. Install the
panel to prevent debris from falling through the vents of the drive housing
during installation. Remove the panel for IP 20/Open Type applications.
Frame D, E, F, G and H Drives – These drives have built-in debris protection.
Installation of a protective panel is not required.
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 17
Page 20
Chapter 1 Installation/Wiring
Frame C Frame E and F (Typical)
Important:
Tighten screw after jumper removal.
Storage
• Store within an ambient temperature range of -40° to +85°C.
• Store within a relative humidity range of 0% to 95%,non-condensing.
• Do not expose to a corrosive atmosphere.
AC Supply Source Considerations
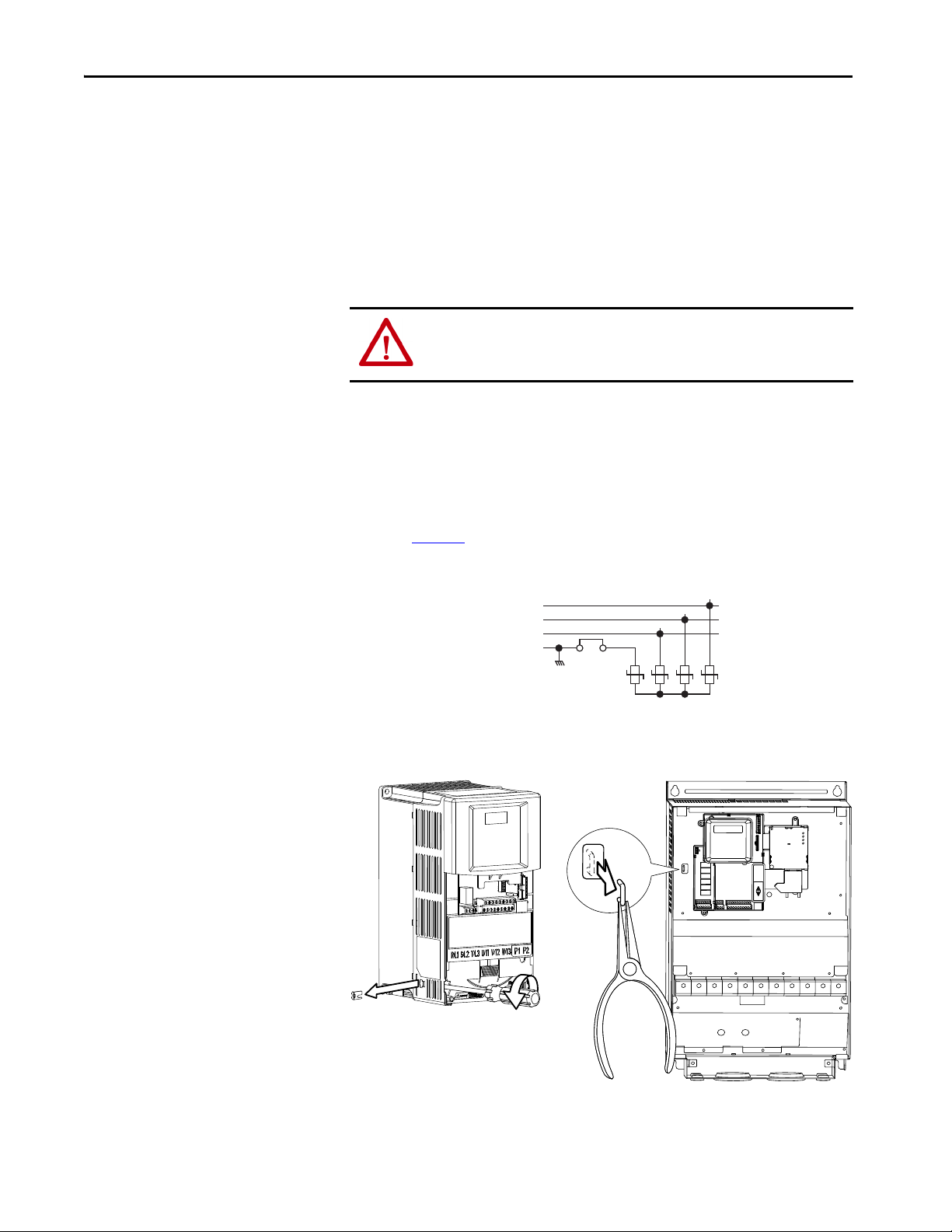
Ungrounded Distribution Systems
ATT EN TI ON : PowerFlex 400 drive frames contain protective MOVs that are
referenced to ground. These devices must be disconnected if the drive is
installed on an ungrounded or resistive grounded distribution system.
Disconnecting MOVs (Drive Frames C, E and F only.)
To prevent drive damage, the MOVs connected to ground shall be
disconnected if the drive is installed on an ungrounded distribution system
where the line-to-ground voltages on any phase could exceed 125% of the
nominal line-to-line voltage. To disconnect these devices, remove the jumper
shown in Figure 6
Figure 5 - Phase to Ground MOV Removal
.
Three-Phase
AC Input
R/L1
S/L2
T/L3
Jumper
123
4
18 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Figure 6 - MOV Jumper Location
Page 21
Installation/Wiring Chapter 1
SHLD
U/T1
V/T2
W/T3
R/L1
S/L2
T/L3
Note: Frame D, G and H drives do not contain a MOV to ground connection
and are suitable for operation in both grounded and ungrounded distribution
systems without modification.
Input Power Conditioning
The drive is suitable for direct connection to input power within the rated
voltage of the drive (see Appendix A
conditions which may cause component damage or reduction in product life. If
any of the conditions exist, as described in Ta b l e 1
listed under the heading Corrective Action on the line side of the drive.
IMPORTANT Only one device per branch circuit is required. The device should be mounted
closest to the branch and sized to handle the total current of the branch
circuit.
Table 1 - Input Power Conditions
Input Power Condition Corrective Action
Low Line Impedance (less than 1% line reactance) • Install Line Reactor
Line has power factor correction capacitors • Install Line Reactor
Line has frequent power interruptions
Line has intermittent noise spikes in excess of 6000V
(lightning)
Phase to ground voltage exceeds 125% of normal line to
line voltage
Ungrounded distribution system
(1) Refer to Appendix B for accessory ordering information.
). Listed in Ta b l e 1 are certain input power
, install one of the devices
(1)
• or Isolation Transformer
(1)
• or Isolation Transformer
• Remove MOV jumper to ground (Frame C, E and F
drives only)
• or Install Isolation Transformer with grounded
secondary if necessary
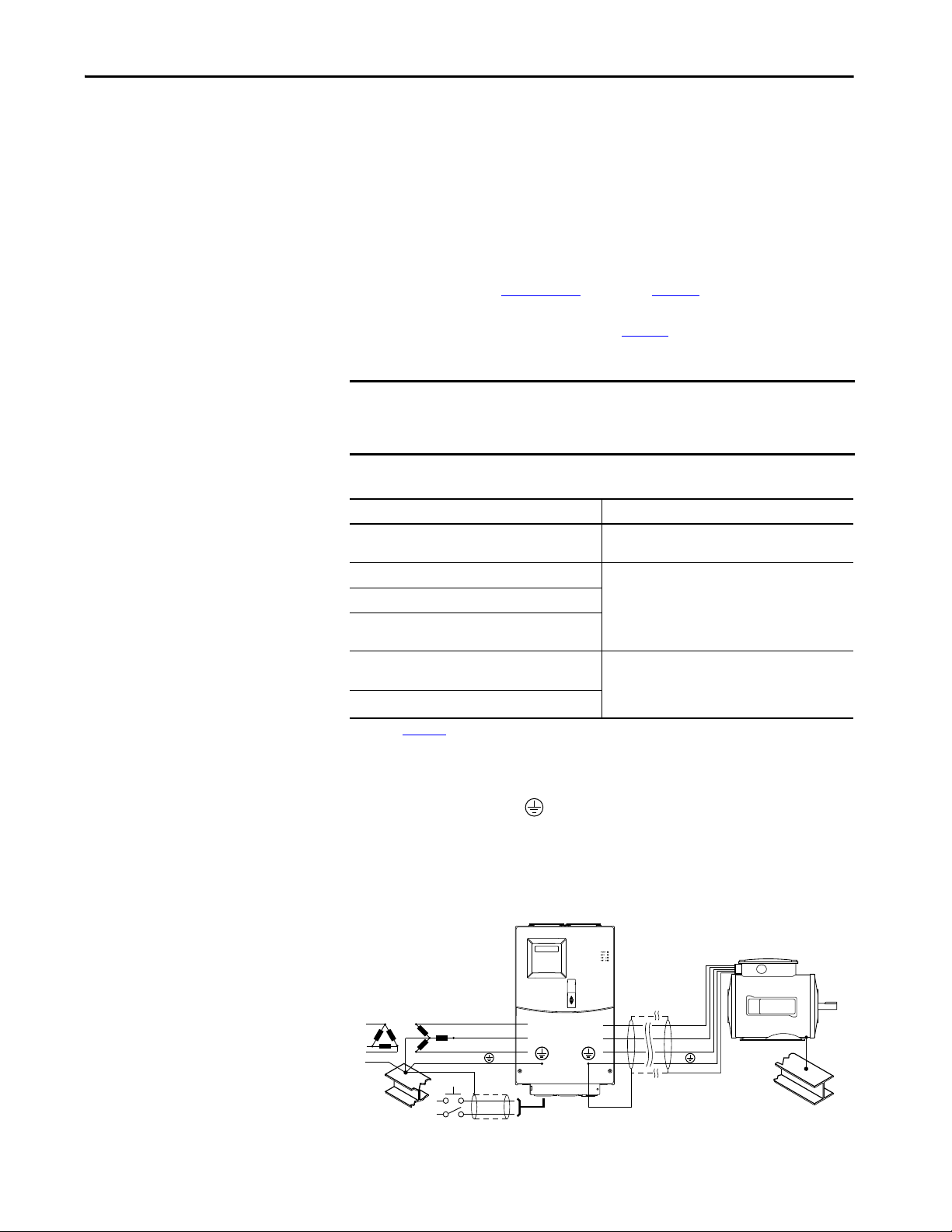
General Grounding Requirements
The drive Safety Ground - (PE) must be connected to system ground.
Ground impedance must conform to the requirements of national and local
industrial safety regulations and/or electrical codes. The integrity of all ground
connections should be periodically checked.
Figure 7 - Typical Grounding
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 19
Page 22

Chapter 1 Installation/Wiring
Ground Fault Monitoring
If a system ground fault monitor (RCD) is to be used, only Type B (adjustable)
devices should be used to avoid nuisance tripping.
Safety Ground - (PE)
This is the safety ground for the drive that is required by code. One of these
points must be connected to adjacent building steel (girder, joist), a floor
ground rod or bus bar. Grounding points must comply with national and local
industrial safety regulations and/or electrical codes.
Motor Ground
The motor ground must be connected to one of the ground terminals on the
drive.
Shield Termination - SHLD
Either of the safety ground terminals located on the power terminal block
provides a grounding point for the motor cable shield. The motor cable shield
connected to one of these terminals (drive end) should also be connected to
the motor frame (motor end). Use a shield terminating or EMI clamp to
connect the shield to the safety ground terminal. The conduit box may be used
with a cable clamp for a grounding point for the cable shield.
When shielded cable is used for control and signal wiring, the shield should
be grounded at the source end only, not at the drive end.
RFI Filter Grounding
Using an external filter with any drive rating, may result in relatively high
ground leakage currents. Therefore, the filter must only be used in
installations with grounded AC supply systems and be permanently
installed and solidly grounded (bonded) to the building power distribution
ground. Ensure that the incoming supply neutral is solidly connected (bonded)
to the same building power distribution ground. Grounding must not rely on
flexible cables and should not include any form of plug or socket that would
permit inadvertent disconnection. Some local codes may require redundant
ground connections. The integrity of all connections should be periodically
checked.
20 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 23
Installation/Wiring Chapter 1
Fuses and Circuit Breakers
The PowerFlex 400 does not provide branch short circuit protection. This
product should be installed with either input fuses or an input circuit breaker.
National and local industrial safety regulations and/or electrical codes may
determine additional requirements for these installations.
Fusing
The ratings in the table that follows are the recommended values for use with
each drive rating. The devices listed in this table are provided to serve as a
guide.
Bulletin 140M (Self-Protected Combination Controller)/UL489 Circuit Breakers
When using Bulletin 140M or UL489 rated circuit breakers, the guidelines
listed below must be followed in order to meet the NEC requirements for
branch circuit protection.
• Bulletin 140M can be used in single and group motor applications.
• Bulletin 140M can be used up stream from the drive without the need
for fuses.
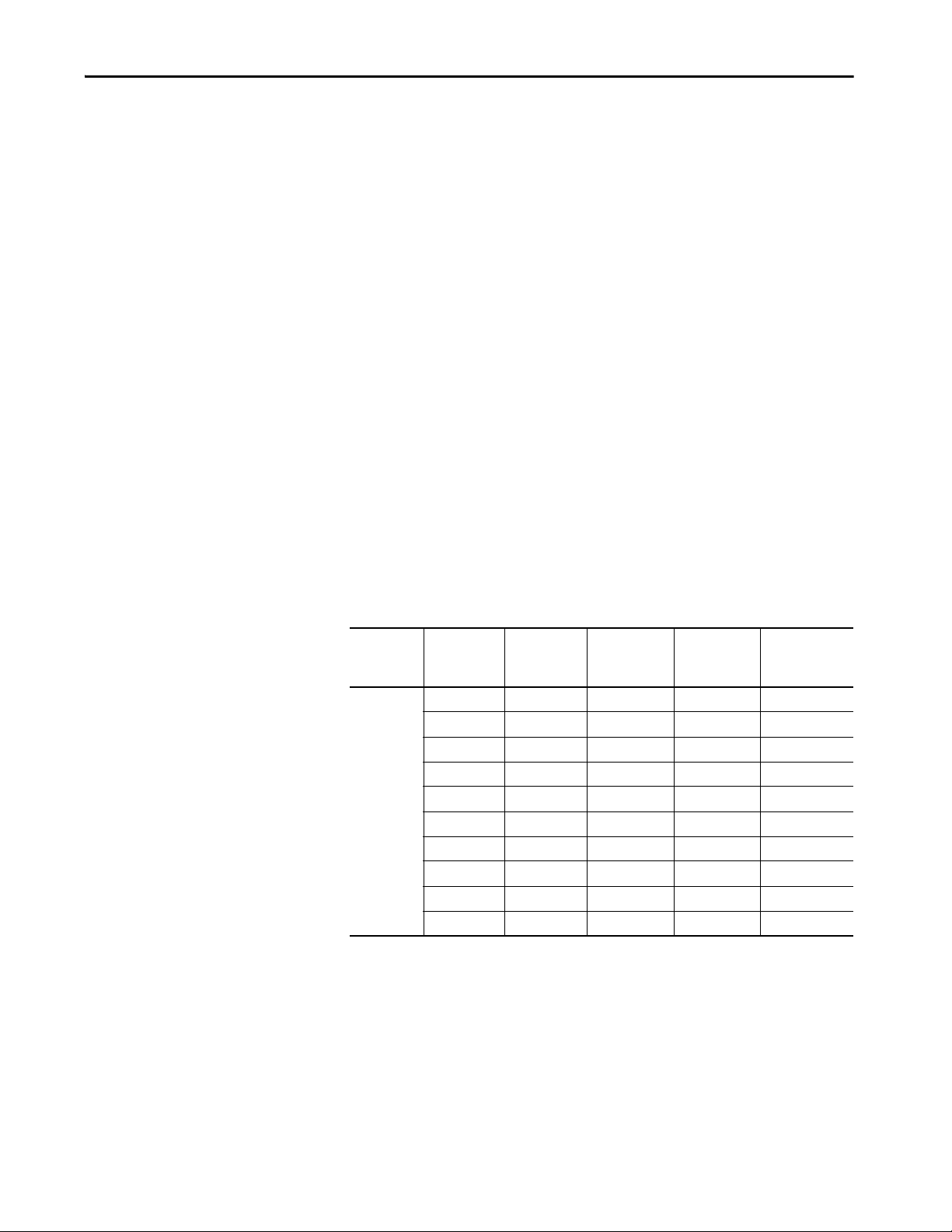
Table 2 - Recommended Branch Circuit Protective Devices
Volt age
Rating
200-240V AC
– 3-Phase
Drive Rating
kW (HP)
2.2 (3.0) 20 140M-F8E-C16 100-C23 5098
3.7 (5.0) 30 140M-F8E-C25 100-C37 5098
5.5 (7.5) 35 140M-F8E-C32 100-C37 5098
7.5 (10) 45 140M-F8E-C45 100-C45 5098
11 (15) 70 — 100-C60 —
15 (20) 90 — 100-C85 —
18.5 (25) 100 — 100-D95 —
22 (30) 125 — 100-D110 —
30 (40) 175 — 100-D180 —
37 (50) 200 — 100-D180 —
Fuse Rating
Amps
(1)
140M Motor
Protectors
Catalog No.
(2)(3)
Recommended
MCS Contactors
Catalo g No.
Min. Enclosure
(4)
Volume
3
Inches
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 21
Page 24
Chapter 1 Installation/Wiring
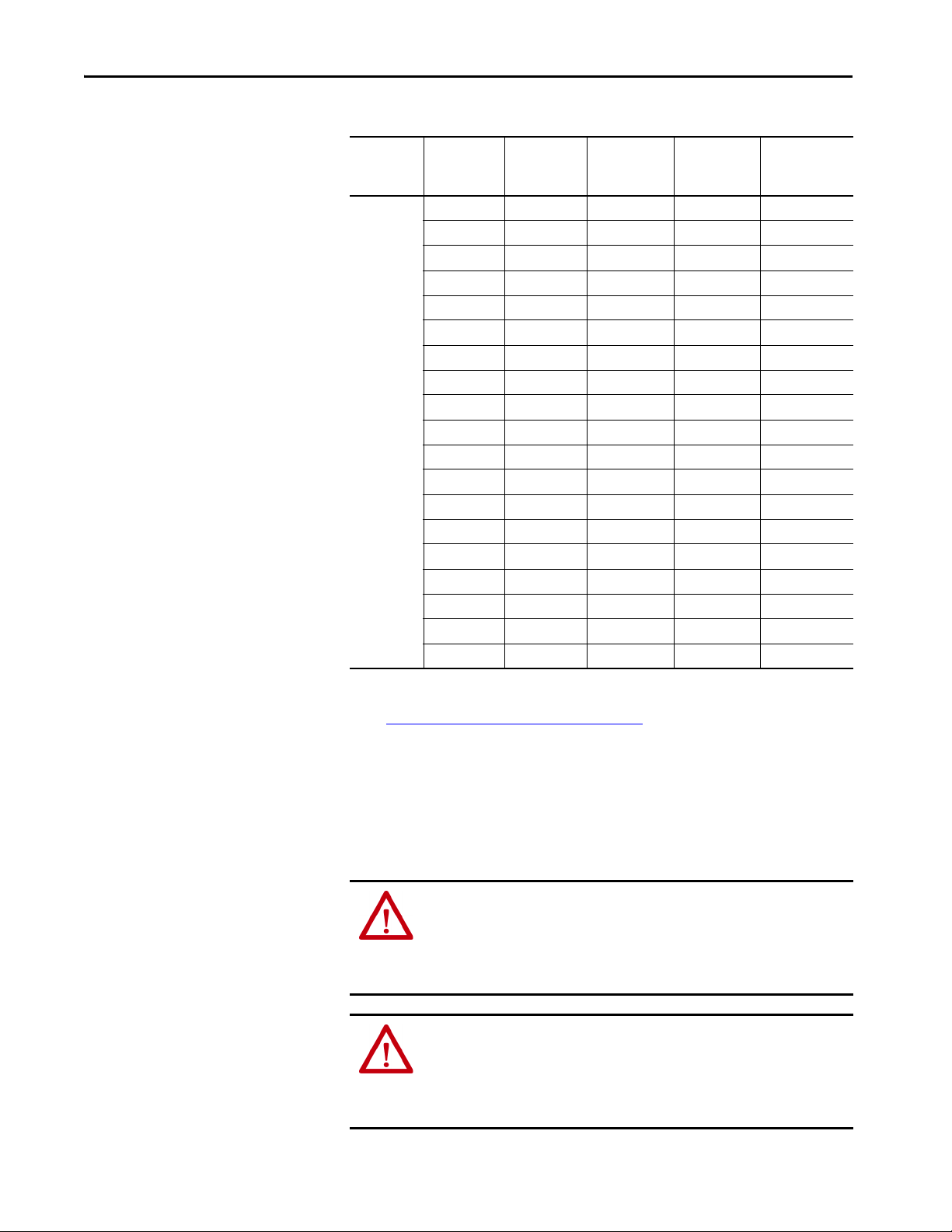
Table 2 - Recommended Branch Circuit Protective Devices
Volt age
Rating
380-480V AC
–
3-Phase
(1) Recommended Fuse Class: UL Class J, CC, T or Type BS88; 600V (550V) or equivalent.
(2) The AIC ratings of the Bulletin 140M Motor Protector Circuit Breakers may vary.
See Bulletin 140M Motor Protection Circuit Breakers Application Ratings.
(3) Manual Self-Protected (Type E) Combination Motor Controller, UL listed for 208 Wye or Delta, 240 Wye or Delta, 480Y/277 or
600Y/347. Not UL listed for use on 480V or 600V Delta/Delta, corner ground, or high-resistance ground systems.
(4) When using a Manual Self-Protected (Type E) Combination Motor Controller, the drive must be installed in a ventilated or non-
ventilated enclosure with the minimum volume specified in this column. Application specific thermal considerations may
require a larger enclo sure.
Drive Rating
kW (HP)
2.2 (3.0) 10 140M-D8E-C10 100-C09 5098
4.0 (5.0) 20 140M-D8E-C16 100-C16 5098
5.5 (7.5) 20 140M-D8E-C16 100-C23 5098
7.5 (10) 25 140M-D8E-C20 100-C23 5098
11 (15) 30 140M-F8E-C32 100-C30 5098
15 (20) 40 140M-F8E-C32 100-C37 5098
18.5 (25) 50 140M-F8E-C45 100-C60 9086
22 (30) 60 — 100-C60 —
30 (40) 80 — 100-C85 —
37 (50) 100 — 100-C85 —
45 (60) 125 — 100-D110 —
55 (75) 150 — 100-D140 —
75 (100) 200 — 100-D180 —
90 (125) 250 — 100-D210 —
110 (150) 250 — 100-D250 —
132 (200) 300 — 100-D300 —
160 (250) 400 — 100-D420 —
200 (300) 500 — 100-D420 —
250 (350) 600 — 100-D630 —
Fuse Rating
Amps
(1)
140M Motor
Protectors
Catalog No.
(2)(3)
Recommended
MCS Contactors
Catalo g No.
Min. Enclosure
(4)
Volume
3
Inches
Power Wiring
ATT EN TI ON : National Codes and standards (NEC, VDE, BSI, etc.) and local
codes outline provisions for safely installing electrical equipment.
Installation must comply with specifications regarding wire types, conductor
sizes, branch circuit protection and disconnect devices. Failure to do so may
result in personal injury and/or equipment damage.
ATT EN TI ON : To avoid a possible shock hazard caused by induced voltages,
unused wires in the conduit must be grounded at both ends. For the same
reason, if a drive sharing a conduit is being serviced or installed, all drives
using this conduit should be disabled. This will help minimize the possible
shock hazard from “cross coupled” power leads.
22 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 25
Installation/Wiring Chapter 1
Motor Cable Types Acceptable for 200...600 Volt Installations
A variety of cable types are acceptable for drive installations. For many
installations, unshielded cable is adequate, provided it can be separated from
sensitive circuits. As an approximate guide, allow a spacing of 0.3 meters (1
foot) for every 10 meters (32.8 feet) of length. In all cases, long parallel runs
must be avoided. Do not use cable with an insulation thickness less than 15
mils (0.4 mm/0.015 in.). Do not route more than three sets of motor leads in a
single conduit to minimize “cross talk”. If more than three drive/motor
connections per conduit are required, shielded cable must be used.
UL installations must use 600V, 75°C or 90°C wire.
Use copper wire only.
Unshielded
THHN, THWN or similar wire is acceptable for drive installation in dry
environments provided adequate free air space and/or conduit fill rates limits
are provided. Do not use THHN or similarly coated wire in wet areas. Any
wire chosen must have a minimum insulation thickness of 15 mils and should
not have large variations in insulation concentricity.
Shielded/Armored Cable
Shielded cable contains all of the general benefits of multi-conductor cable
with the added benefit of a copper braided shield that can contain much of the
noise generated by a typical AC Drive. Strong consideration for shielded cable
should be given in installations with sensitive equipment such as weigh scales,
capacitive proximity switches and other devices that may be affected by
electrical noise in the distribution system. Applications with large numbers of
drives in a similar location, imposed EMC regulations or a high degree of
communications /networking are also good candidates for shielded cable.
Shielded cable may also help reduce shaft voltage and induced bearing currents
for some applications. In addition, the increased impedance of shielded cable
may help extend the distance that the motor can be located from the drive
without the addition of motor protective devices such as terminator networks.
Refer to Reflected Wave in “Wiring and Grounding Guidelines for PWM AC
Drives,” publication DRIVES-IN001A-EN-P
Consideration should be given to all of the general specifications dictated by
the environment of the installation, including temperature, flexibility, moisture
characteristics and chemical resistance. In addition, a braided shield should be
included and be specified by the cable manufacturer as having coverage of at
least 75%. An additional foil shield can greatly improve noise containment.
.
A good example of recommended cable is Belden® 295xx (xx determines
gauge). This cable has four (4) XLPE insulated conductors with a 100%
coverage foil and an 85% coverage copper braided shield (with drain wire)
surrounded by a PVC jacket.
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 23
Page 26
Chapter 1 Installation/Wiring
Other types of shielded cable are available, but the selection of these types may
limit the allowable cable length. Particularly, some of the newer cables twist 4
conductors of THHN wire and wrap them tightly with a foil shield. This
construction can greatly increase the cable charging current required and
reduce the overall drive performance. Unless specified in the individual
distance tables as tested with the drive, these cables are not recommended and
their performance against the lead length limits supplied is not known.
Table 3 - Recommended Shielded Wire
Location Rating/Type Description
Standard
(Option 1)
Standard
(Option 2)
Class I & II;
Division I & II
600V, 90°C (194°F)
XHHW2/RHW-2
Anixter B209500-B209507,
Belden 29501-29507,
or equivalent
Tray rated 600V, 90°C
(194°F) RHH/RHW-2
Anixter OLF-7xxxxx
or equivalent
Tray rated 600V, 90°C
(194°F) RHH/RHW-2
Anixter 7V-7xxxx-3G
or equivalent
• Four tinned copper conductors with XLPE
insulation.
• Copper braid/aluminum foil combination shield
and tinned copper drain wire.
•PVC jacket.
• Three tinned copper conductors with XLPE
insulation.
• 5 mil single helical copper tape (25% overlap min.)
with three bare copper grounds in contact with
shield.
•PVC jacket.
• Three bare copper conductors with XLPE insulation
and impervious corrugated continuously welded
aluminum armor.
• Black sunlight resistant PVC jacket overall.
• Three copper grounds on #10 AWG and smaller.
Reflected Wave Protection
The drive should be installed as close to the motor as possible. Installations
with long motor cables may require the addition of external devices to limit
voltage reflections at the motor (reflected wave phenomena). See Ta b l e 4
for
recommendations.
The reflected wave data applies to all frequencies 2 to 10 kHz.
For 240V ratings, reflected wave effects do not need to be considered.
Table 4 - Maximum Cable Length Recommendations
Reflected Wave
380...480V Ratings Motor Insulation Rating Motor Cable Only
1000 Vp-p 7.6 meters (25 feet)
1200 Vp-p 22.9 meters (75 feet)
1600 Vp-p 152.4 meters (500 feet)
(1) Longer cable lengths can be achieved by installing devices on the output of the drive. Consult factory for recommendations.
(1)
Output Disconnect
The drive is intended to be commanded by control input signals that will start
and stop the motor. A device that routinely disconnects then reapplies output
power to the motor for the purpose of starting and stopping the motor should
24 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 27
Installation/Wiring Chapter 1
Frame D
R/L1
S/L2
T/L3
P1
P2
DC–
U/T1
V/T2
W/T3
Frame C
R/L1 S/L2 T/L3
U/T1 V/T2
W/T3
P2 P1
BR–BR+DC+DC–
not be used. If it is necessary to disconnect power to the motor with the drive
outputting power, an auxiliary contact should be used to simultaneously
disable drive control run commands.
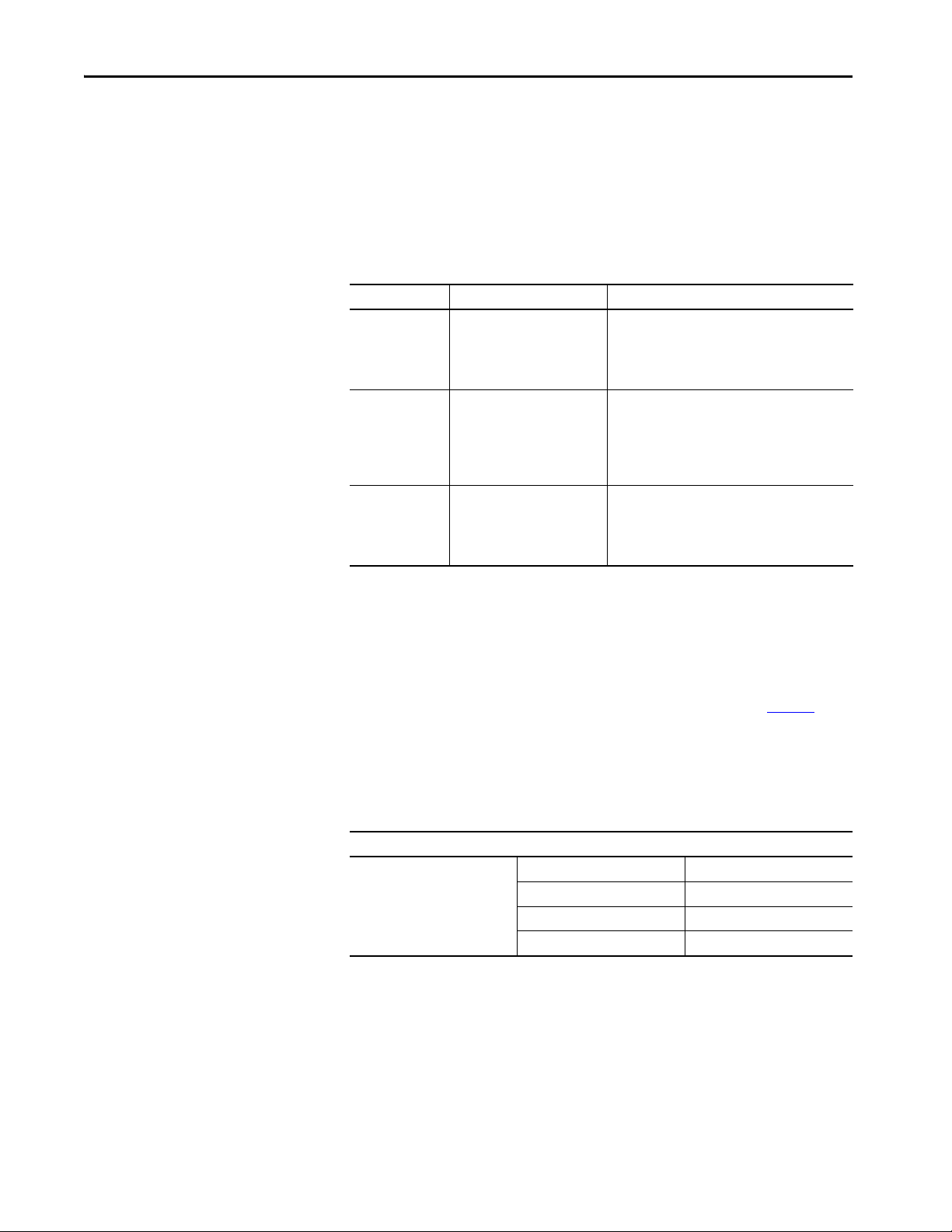
Power Terminal Block
Frame C, D, F, G and H drives utilize a finger guard over the power wiring
terminals. Replace the finger guard when wiring is complete.
Figure 8 - Power Terminal Blocks (Frames C through D)
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 25
Page 28
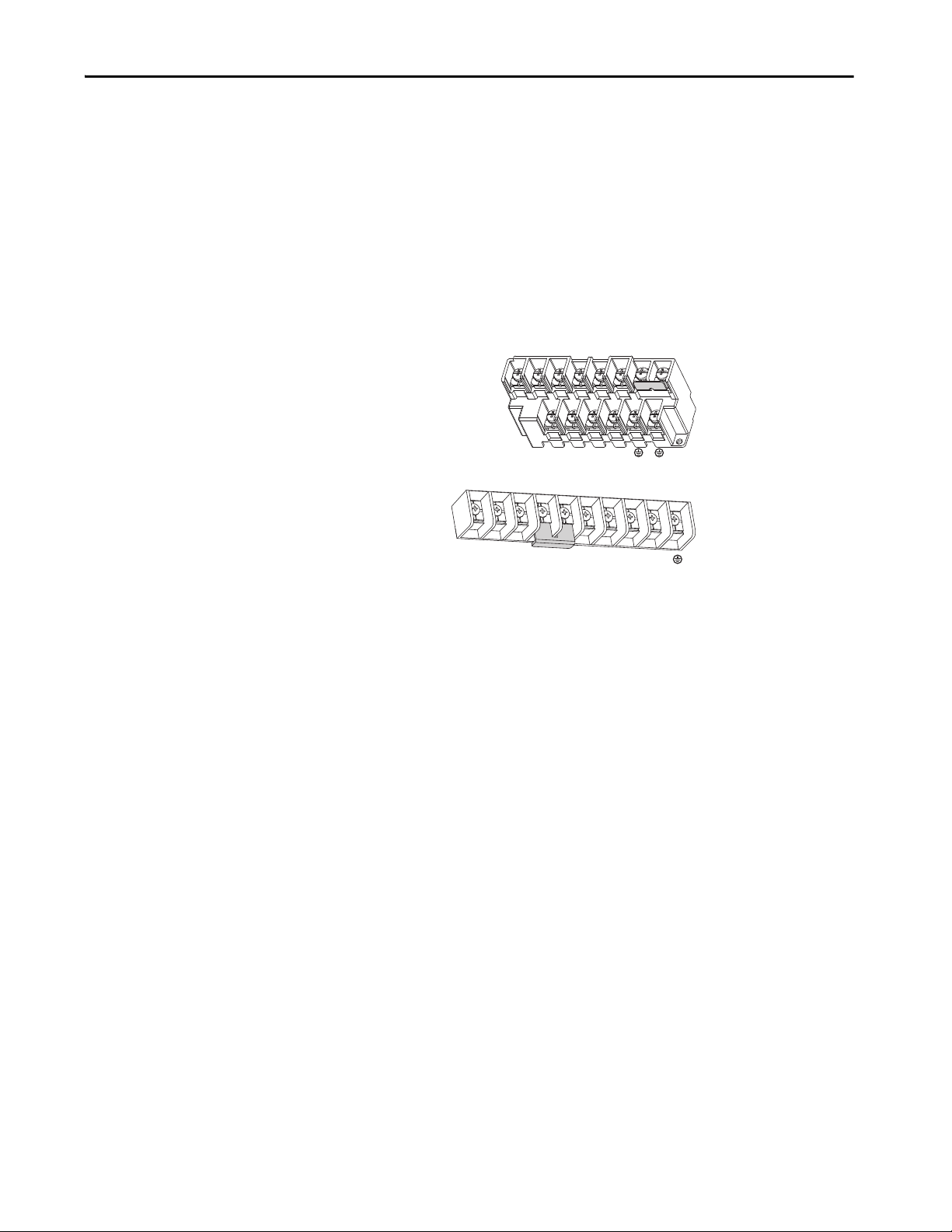
Chapter 1 Installation/Wiring
Bottom view of terminal block and wire
Jumper
Wire
Wire
Jumper
Correc t Incor rect
Figure 9 - Power Terminal Blocks (Frames E through H)
R/L1
S/L2
R/L1
R/L1
S/L2
T/L3
S/L2
T/L3
T/L3
P1
P1
P2
DC–
P1
P2
DC–
U/T1
V/T2
P2
DC–
U/T1
V/T2
W/T3
U/T1
V/T2
W/T3
W/T3
Frame E:
480V
37-45 kW
(50-60 HP)
Frame E:
240V 480V
30-37 kW 55-75 kW
(40-50 HP) (75-100 HP)
See note at the bottom
of this page.
Frame F
Frame G
R/L1
S/L2
T/L3
P2
U/T1
W/T3
DC–
V/T2
P1
Frame H
R/L1
S/L2
T/L3
DC+
DC–
U/T1
V/T2
W/T3
IMPORTANT For Frame E, 240V 30...37 kW (40...50 HP) and 480V 55...75 kW (75...100 HP)
drives, take care to place the wire beneath the jumper and not above it when
connecting to terminals P1 and P2.
P1 P2 DC- P1 P2 DC-
26 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 29
Installation/Wiring Chapter 1
Table 5 - Power Terminal Descriptions
(1)
Ter min al
R/L1, S/L2, T/L3 3-Phase Input
U/T1 To Motor U/T1
V/T2 To Motor V/T2 =
W/T3 To Motor W/T3
P2, P1 DC Bus Inductor Connection
DC–, DC+ DC Bus Connection (Frame C and H Drives)
P2, DC– DC Bus Connection (Frame D, E, F and G Drives)
BR+, BR– Not Used
(1) Important: Terminal screws may become loose during shipment. Ensure that all terminal screws are tightened
to the recommended torque before applying power to the drive.
Description
Switch any two
motor leads to change
forward direction.
Drives are shipped with a jumper between Terminals P2 and P1.
Remove this jumper only when a DC Bus Inductor will be connected.
Drive will not power up without a jumper or inductor connected.
Safety Ground - PE
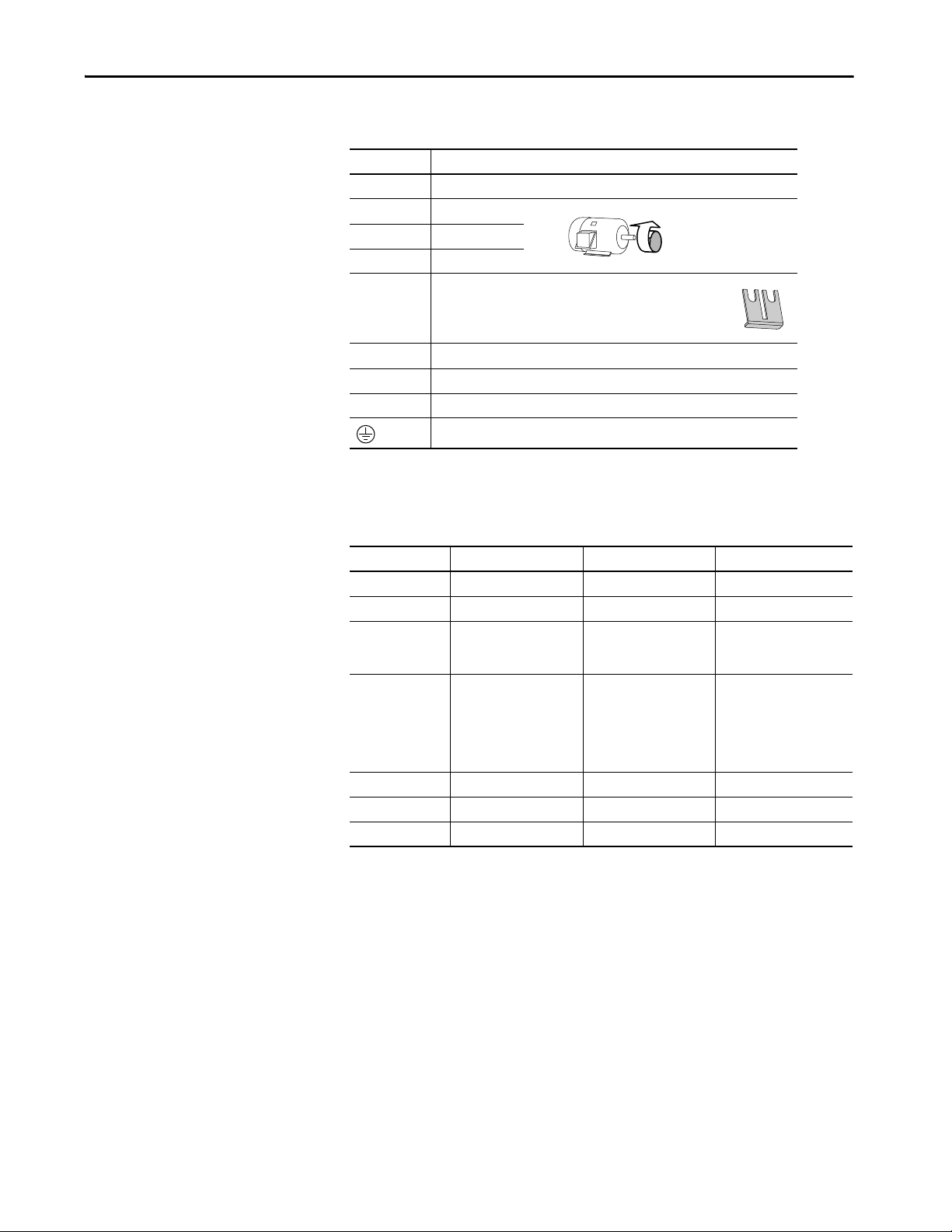
Table 6 - Power Terminal Block Specifications
Frame Maximum Wire Size
C8.4 mm
2
(8 AWG) 1.3 mm2 (16 AWG) 2.9 N-m (26 lb-in)
(1)
Minimum Wire Size
D 33.6 mm2 (2 AWG) 8.4 mm2 (8 AWG) 5.1 N-m (45 lb-in)
E480V
33.6 mm2 (2 AWG) 3.5 mm2 (12 AWG) 5.6 N-m (49.5 lb-in)
37...45 kW
(50...60 HP)
E240V
107.2 mm
2
(4/0 AWG) 53.5 mm2 (1/0 AWG) 19.5 N-m (173 lb-in)
30-37 kW
(40...50 HP)
480V
55...75 kW
(75...100 HP)
F 152.0 mm2 (300 MCM) 85.0 mm2 (3/0 AWG) 19.5 N-m (173 lb-in)
2
G 152.0 mm
(300 MCM) 107.2 mm2 (4/0 AWG) 29.4 N-m (260 lb-in)
H 253.0 mm2 (500 MCM) 152.0 mm2 (300 MCM) 40.0 N-m (354 lb-in)
(1) Maximum/minimum sizes that the terminal block will accept – these are not recommendations. If national or local codes
require sizes outside this range, lugs may be used. Some ratings will require a pair of wires.
(1)
Recommended Torque
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 27
Page 30
Chapter 1 Installation/Wiring
I/O Wiring Recommendations
Motor Start/Stop Precautions
ATT EN TI ON : A contactor or other device that routinely disconnects and
reapplies the AC line to the drive to start and stop the motor can cause drive
hardware damage. The drive is designed to use control input signals that will
start and stop the motor. If used, the input device must not exceed one
operation per minute or drive damage can occur.
ATT EN TI ON : The drive start/stop control circuitry includes solid-state
components. If hazards due to accidental contact with moving machinery or
unintentional flow of liquid, gas or solids exist, an additional hardwired stop
circuit may b e require d to remove the AC line to the drive. When the AC line is
removed, there will be a loss of any inherent regenerative braking effect that
might be present - the motor will coast to a stop. An auxiliary braking
method may be required.
Important points to remember about I/O wiring:
• Always use copper wire.
• Wire with an insulation rating of 600V or greater is recommended.
• Control and signal wires should be separated from power wires by at
least 0.3 meters (1 foot).
•
ATT EN TI ON : Driving the 4-20 mA analog input from a voltage source could
cause component damage. Verify proper configuration prior to applying
input signals.
Control Wire Types
Table 7 - Recommended Control and Signal Wire
Wire Type(s) Description Minimum Insulation Rating
Belden 8760/9460
or equivalent
Belden 8770
or equivalent
(1) If the wires are short and contained within a cabinet which has no sensitive circuits, the use of shielded wire may not be
necessary, but is always recommended.
2
0.8 mm
(18 AWG), twisted pair,
100% shield with drain
0.8 mm2 (18 AWG), 3 conductor,
shielded for remote pot only.
(1)
300V
60 °C
(140 °F)
I/O Terminal Block
Table 8 - I/O Terminal Block Specifications
Frame Maximum Wire Size
All 1.3 mm
(1) Maximum/minimum sizes that the terminal block will accept - these are not recommendations.
2
(16 AWG) 0.13 mm2 (26 AWG) 0.5...0.8 N-m (4.4...7 lb-in)
(1)
Minimum Wire Size
(1)
Tor que
28 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 31

Installation/Wiring Chapter 1
P036 [Start Source] Stop I/O Terminal 01 Stop
Keypad Per P037 Coast
3-Wire Per P037 Per P037
(4)
2-Wire Per P037 Coast
RS485 Port Per P037 Coast
Maximum Control Wire Recommendations
Do not exceed control wiring length of 30 meters (100 feet). Control signal
cable length is highly dependent on electrical environment and installation
practices. To improve noise immunity, the I/O terminal block Common must
be connected to ground terminal/protective earth. If using the RS485 (DSI)
port, I/O Terminal 20 should also be connected to ground terminal/protective
earth.
Figure 10 - Control Wiring Block Diagram
SNK Wiring
Pot must be
1-10k ohm
2 Watt Min.
Common
Typical
(3)
24V
ENBL
#1 Relay N.O.
#1 Relay Common
#1 Relay N.C.
#2 Relay N.O.
#2 Relay Common
#2 Relay N.C.
Enable
Jumper
R1
R2
R3
R4
R5
R6
AO1
10V
(4)
20MA
1 of 7 Digital Input Circuits
SNK
SRC
Earth Referenced
Frames D & E
Isolated
30V DC
50mA
Non-inductive
AO2
10V
10V
20MA
AI1
20MA
SRCSNK
(5)
0-10V
0-20mA
AI2
10V
20MA
+24V
+10V
0-10V
0-20mA
0-10V
0-20mA
Stop/
Function Loss
01
Start/Run FWD
02
Direction/Run REV
03
Digital Common
04
Digital Input 1
05
Digital Input 2
06
Digital Input 3
07
Digital Input 4
08
Digital Common
09
Opto Common
10
+24V DC Source
11
+10V DC Source
12
Analog Input 1 (AI1)
13
Analog Common 1
14
Analog Output 1 (AO1)
15
Analog Output 2 (AO2)
16
Analog Input 2 (AI2)
17
Analog Common 2
18
Opto Output
19
RS485 Shield
20
RS485
(DSI)
(1)(4)
(2)
Typical
SRC Wiring
(6)
(1) Important: I/O Terminal 01 is always a coast to stop input
except when P036 [Start Source] is set to option 1 “3-Wire”
or 6 “2-W Lvl/Enbl”. In three wire control, I/ O Terminal 01 is
controlled by P037 [Stop Mode]. All other stop sources are
controlled by P037 [Stop Mode].
Important: The drive is shipped with a jumper installed
between I/O Terminals 01 and 11. Remove this jumper
when using I/O Terminal 01 as a stop or enable input.
(2) Two wire co ntrol shown. Fo r three wire con trol use a mom entary input on I/O Terminal 02 to command a start. If reverse
is enabled by A166, use a maintained input for I/O Terminal 03 to change direction.
(3) When using an opto output with an inductive load such as a relay, install a recovery diode parallel to the relay as shown, to
prevent damage to the output.
(4) When the ENBL enable jumper is removed, I/O Terminal 01 will always act as a hardware enable, causing a coast to stop without
softwa re interpretat ion.
(5) Most I/O terminals labeled “Common” are not referen ced to the sa fety ground (PE) terminal and are designed to greatly reduce
common mode interference. Frame D...H drives have Analog Common 1 referenced to ground.
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 29
Page 32

Chapter 1 Installation/Wiring
(6) Common for Analog Input 2 (AI2). Electronically isolated from digital I/O and opto output. Not to be used with Analog Input 1
(AI1), Analog Output 1 (AO1) or Analog Output 2 (AO2). With Analog Input 2, provides one fully isolated analog input channel.
Table 9 - Control I/O Terminal Designations
No. Signal Default Description Param.
01 Stop
(1)
/
Funct ion Loss
Coast Factory installed jumper or a normally closed input
must be present for the drive to start.
Program with P036 [Start Source].
02 Start/Run FWD – HAND Mode: Command comes from Integral Keypad.
AUTO Mode: I/O Terminal 02 is active.
Program with P036 [Start Source].
03 Direction/Run REV Rev Disabled To enable reverse operation, program with A166
[Reverse Disable].
Program with P036 [Start Source].
04 Digital Common – For digital inputs. Tied to I/O Terminal 09.
Electronically isolated with digital inputs from analog
I/O and opto output.
05 Digital Input 1 Purge
(2)
Program with T051 [Digital In1 Sel]. T051
06 Digital Input 2 Local Program with T052 [Digital In2 Sel]. T052
07 Digital Input 3 Clear Fault Program with T053 [Digital In3 Sel]. T053
08 Digital Input 4 Comm Port Program with T054 [Digital In4 Sel]. T054
09 Digital Common – For digital inputs. Tied to I/O Terminal 04.
Electronically isolated with digital inputs from analog
I/O and opto output.
10 Opto Common – For opto-coupled outputs. Electronically isolated with
opto output from analog I/O and digital inputs.
11 +24V DC – Drive supplied power for digital inputs.
Referenced to Digital Common. Max. Output: 100mA.
12 +10V DC – Drive supplied power for 0-10V external
potentiometer.
Referenced to Analog Common. Max. Output: 15mA.
13 Analog Input 1 0-10V External 0-10V (unipolar), 0-20mA or 4-20mA input
supply or potentiometer wiper. Default input is 0-10V.
For current (mA) input, set AI1 DIP Switch to 20mA.
Program with T069 [Analog In 1 Sel].
Input Impedance: 100k ohm (Voltage Mode)
250 ohm (Current Mode)
14 Analog Common 1 – Common for Analog Input 1 and Analog Output 1 and
2. Electrically isolated from digital I/O and opto
output.
15 Analog Output 1 OutFreq 0-10 Default analog output is 0-10V.
For current (mA) value, set AO1 DIP Switch to 20mA.
Program with T082 [Analog Out1 Sel].
Maximum Load: 4-20mA = 525 ohm (10.5V)
0-10V = 1k ohm (10mA)
16 Analog Output 2 OutCurr 0-10 Default analog output is 0-10V.
For a current (mA) value, set AO2 DIP Switch to 20mA.
Program with T085 [Analog Out2 Sel].
Maximum Load: 4-20mA = 525 ohm (10.5V)
0-10V = 1k ohm (10mA)
17 Analog Input 2 0-10V Optically isolated external 0-10V (unipolar), ±10V
(bipolar), 0-20mA or 4-20mA input supply or
potentiometer wiper. Default input is 0-10V.
For current (mA) input, set AI2 DIP Switch to 20mA.
Program with T073 [Analog In 2 Sel].
Input Impedance: 100k ohm (Voltage Mode)
250 ohm (Current Mode)
P036
P036,
P037
P036,
P037,
A166
P038
T069,
T070,
T071,
T072
P038
T051...
T054,
A152
T082,
T084,
T085,
T086,
T087
T073,
T074,
T075,
T076
(1)
,
30 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 33

Installation/Wiring Chapter 1
Table 9 - Control I/O Terminal Designations
No. Signal Default Description Param.
18 Analog Common 2 – For Analog Input 2. Elec tronically isolated from digital
I/O and opto output. With Analog Input 2, provides
one fully isolated analog input channel.
19 Opto Output At Frequency Program with T065 [Opto Out Sel]. T065
T066
T068
20 RS485 (DSI) Shield – Terminal connected to Safety Ground - PE when using
the RS485 (DSI) Communication Port.
(1) See Footnotes (1) and (4) on page 29.
(2) Important information regarding Stop commands and the [Digital Inx Sel] Purge option is provided on page 66
.
Table 10 - Relay Terminal Designations and DIP Switches
No. Signal Default Description Param.
R1 #1 Relay N.O. Ready/Fault Normally open contact for No. 1 output relay. T055
R2 #1 Relay Common – Common for output relay.
R3 #1 Relay N.C. Ready/Fault Normally closed contact for No. 1 output relay. T055
R4 #2 Relay N.O. Motor Running Normally open contact for No. 2 output relay. T060
R5 #2 Relay Common – Common for output relay.
R6 #2 Relay N.C. Motor Running Normally closed contact for No. 2 output relay. T060
,
,
Selection DIP Switches:
Analog Input (AI1 & AI2)
Analog Output (AO1 & AO2)
0-10V Sets analog output to either voltage or current.
Settings must match: AI1 & T069 [Analog In 1 Sel]
AI2 & T073 [Analog In 2 Sel]
AO1 & T082 [Analog Out1 Sel]
AO2 & T085 [Analog Out2 Sel]
Sink/Source DIP Switch Source (SRC) Inputs can be wired as Sink (SNK) or Source (SRC)
via DIP Switch setting.
Figure 11 - User Installed Auxiliary Relay Card (Frames D, E, F, G and H Only)
3A
3B
4A
4B
5A
5B
6A
6B
7A
7B
8A
8B
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 31
Page 34

Chapter 1 Installation/Wiring
12
13
14
17
18
-/+ 10V
Common
IMPORTANT If using auxiliary motor control, ensure that wiring and parameter
configuration are correct before wiring contactor outputs. All relays on the
Auxiliary Relay Card will energize on power-up by default. Failure to verify
proper wiring and parameter configuration can result in improper motor
operation or drive damage. Refer to Appendix D
Table 11 - User Installed Relay Board Terminal Designations
No. Signal Default Description Param.
3A #3 Relay N.O. Ready/Fault Normally open contact for Number 3 Output Relay R221
3B #3 Relay Common – Common for Number 3 Output Relay
4A #4 Relay N.O. Ready/Fault Normally open contact for Number 4 Output Relay R224
4B #4 Relay Common – Common for Number 4 Output Relay
5A #5 Relay N.O. Ready/Fault Normally open contact for Number 5 Output Relay R227
5B #5 Relay Common – Common for Number 5 Output Relay
6A #6 Relay N.O. Ready/Fault Normally open contact for Number 6 Output Relay R230
6B #6 Relay Common – Common for Number 6 Output Relay
7A #7 Relay N.O. Ready/Fault Normally open contact for Number 7 Output Relay R233
7B #7 Relay Common – Common for Number 7 Output Relay
8A #8 Relay N.O. Ready/Fault Normally open contact for Number 8 Output Relay R236
8B #8 Relay Common – Common for Number 8 Output Relay
for more details.
I/O Wiring Examples
Input/Output Connection Example Required Settings
Potentiometer
1-10k Ohm Potentiometer
Recommended
(2 Watt Minimum)
Analog Input
Bipolar Speed Reference,
±10V Input
DIP Switch
AI1 = 10V
Param eters
P038 [Speed Reference] = 2 “Analog In1”
T069 [Analog In 1 Sel] = 2 “0-10V”
Scaling
T070 [Analog In 1 Lo]
T071 [Analog In 1 Hi]
Check Results
d305 [Analog In 1]
DIP Switch
AI2 = 10V
Param eters
P038 [Speed Reference] = 3 “Analog In2”
T073 [Analog In 2 Sel] = 3 “-10 to +10V”
Scaling
T074 [Analog In 2 Lo]
T075 [Analog In 2 Hi]
Check Results
d306 [Analog In 2]
32 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 35

Installation/Wiring Chapter 1
13
14
+
Common
13
14
+
Common
14
15
Common
+
14
16
Common
+
Input/Output Connection Example Required Settings
Analog Input
Unipolar Speed Reference,
0 to +10V Input
DIP Switch
AI1 = 10V
Param eters
P038 [Speed Reference] = 2 “Analog In1”
T069 [Analog In 1 Sel] = 2 “0-10V”
Scaling
T070 [Analog In 1 Lo]
T071 [Analog In 1 Hi]
Check Results
d305 [Analog In 1]
Analog Input
Unipolar Speed Reference,
4-20 mA Input
Analog Output
Unipolar, 0 to +10V Output
• 1k Ohm Minimum
Analog Output
Unipolar, 4-20 mA Output
• 525 Ohm Maximum
DIP Switch
AI1 = 20MA
Param eters
P038 [Speed Reference] = 2 “Analog In1”
T069 [Analog In 1 Sel] = 1 “4-20 mA”
Scaling
T070 [Analog In 1 Lo]
T071 [Analog In 1 Hi]
Check Results
d305 [Analog In 1]
DIP Switch
AO1 = 10V
Param eters
T082 [Analog Out1 Sel] = 0 through 6
Scaling
T083 [Analog Out1 High]
T084 [Analog Out1 Setpt]
DIP Switch
AO2 = 20MA
Param eters
T082 [Analog Out1 Sel] = 14 through 20
Scaling
T083 [Analog Out1 High]
T084 [Analog Out1 Setpt]
2 Wire Control
Sourcing (SRC),
Internal Supply,
Non-Reversing
• Input must be active for
the drive to run.
11
Stop-Run
DIP Switch
01
SNK/SRC = SRC
02
Param eters
P036 [Start Source] = 2, 3, 4
P037 [Stop Mode] = 0 through 7
• When input is opened, the
drive will stop as specified
by P037 [Stop Mode].
• Drive will not run if I/O
Terminal 01 is open. Drive
will coast to stop if opened
while running
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 33
Page 36

Chapter 1 Installation/Wiring
01
02
04
Stop-Run
11
01
02
03
Stop-Run
Forward
Stop-Run
Reverse
Input/Output Connection Example Required Settings
2 Wire Control
Sourcing (SRC),
External Supply,
Non-Reversing
• Input must be active for
Stop-Run
DIP Switch
01
SNK/SRC = SRC
02
Param eters
P036 [Start Source] = 2, 3, 4
04
P037 [Stop Mode] = 0 through 7
the drive to run.
• When input is opened, the
+24V Common
drive will stop as specified
by P037 [Stop Mode].
• User supplied 24V DC
power source must be
used.
• Each digital input draws
6mA.
• Drive will not run if I/O
Terminal 01 is open. Drive
will coast to stop if opened
while running.
2 Wire Control
Sinking (SNK),
Internal Supply,
Non-Reversing
• Input must be active for
DIP Switch
SNK/SRC = SNK
Param eters
P036 [Start Source] = 2, 3, 4
P037 [Stop Mode] = 0 through 7
the drive to run.
• When input is opened, the
drive will stop as specified
by P037 [Stop Mode].
• Drive will not run if I/O
Terminal 01 is open. Drive
will coast to stop if opened
while running.
2 Wire Control
Sourcing (SRC),
Internal Supply,
Run FWD/Run REV
• Input must be active for
the drive to run.
DIP Switch
SNK/SRC = SRC
Param eters
P036 [Start Source] = 2, 3, 4
P037 [Stop Mode] = 0 through 7
A166 [Reverse Disable] = 0 “Enabled”
• When input is opened, the
drive will stop as specified
by P037 [Stop Mode].
• If both Run FWD and Run
REV inputs are closed at
the same time, an
undetermined state could
occur.
• Drive will not run if I/O
Terminal 01 is open. Drive
will coast to stop if opened
while running.
34 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 37

Installation/Wiring Chapter 1
11
01
02
Stop
Start
11
01
02
03
Stop
Start
Direction
Common+24V
CR
09
19
Input/Output Connection Example Required Settings
2 Wire Control with
Function Loss and SW
Enable
Sourcing (SRC),
Internal Supply,
Non-Reversing
• Input must be active for
Function Loss
Run FWD
SW Enable
11
DIP Switch
01
SNK/SRC = SRC
02
Param eters
03
P036 [Start Source] = 6 “2-W Lvl/Enbl”
P037 [Stop Mode] = 0 through 7
the drive to run.
• When input is opened, the
drive will stop as specified
by P037 [Stop Mode].
• Drive will not run if I/O
Terminal 03 is open. Drive
will coast to stop if opened
while running.
• Drive will fault if I/O
Terminal 01 is open. Drive
will coast to stop if opened
while running. Requires
drive reset once terminal is
closed.
3 Wire Control
Sourcing (SRC),
Internal Supply,
Non-Reversing
• A momentary input will
DIP Switch
SNK/SRC = SRC
Param eters
P036 [Start Source] = 1 “3-Wire”
P037 [Stop Mode] = 0 through 7
start the drive.
• A stop input to I/O
Terminal 01 will stop the
drive as specified by P037
[Stop Mode].
3 Wire Control
Sourcing (SRC),
Internal Supply,
Reversing
• A momentary input will
start the drive.
DIP Switch
SNK/SRC = SRC
Param eters
P036 [Start Source] = 1 “3-Wire”
P037 [Stop Mode] = 0 through 7
A166 [Reverse Disable] = 0 “Rev Enabled”
• A stop input to I/O
Terminal 01 will stop the
drive as specified by P037
[Stop Mode].
• I/O Terminal 03 determines
direction.
Opto Output
• When using Opto Output
with an inductive load
such as a relay, install a
Param eters
T065 [Opto Out Sel] = 0 through 15
T066 [Opto Out Level]
T068 [Opto Out Logic]
recovery diode parallel to
the relay as shown to
prevent damage to the
output.
• Opto Output is rated 30V
DC, 50 mA (non-inducti ve).
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 35
Page 38

Chapter 1 Installation/Wiring
ATT EN TIO N: Digital inputs on multiple drives should not be tied
together when using SNK (Internal Supply) mode. In SNK mode, if
power is removed from one drive, inadvertent operation of other
drives that share the same I/O Common connection may occur.
Typical Multiple Drive Connection Examples
Input/Output Connection Example
Multiple Digital
Input Connections
Customer Inputs can
be wired per the
External Supply (SRC)
example on page 34.
Customer Inputs Optional Ground Connection
When connecting a single input such as Run, Stop, Reverse or Preset Speeds to multiple
drives, it is important to connect I/O Terminal 04 common together for all drives. If they are
to be tied into another common (such as earth ground or separate apparatus ground) only
one point of the daisy chain of I/O Terminal 04 should be connected.
Multiple Analog
Connections
12 13 1413 14 13 14
04020402 0402
Remote Potentiometer Optional Ground Connection
When connecting a single potentiometer to multiple drives it is important to connect I/O
Terminal 14 common together for all drives. I/O Terminal 14 common and I/O Terminal 13
(potentiometer wiper) should be daisy-chained to each drive. All drives must be powered
up for the analog signal to be read correctly.
36 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 39

Installation/Wiring Chapter 1
(1) Refer to
page 50
for
additional
information
on the
operation of
the Hand/
Auto Mode.
Start and Speed Reference Control
The drive speed command can be obtained from a number of different sources.
The source is normally determined by P038
command is normally determined by P036
[Speed Reference]. The drive Start
[Start Source]. However, the
settings for these parameters can be overridden by a variety of methods. See the
chart below for the override priority.
Purge Input
Enabled and Active:
[Digital Inx Sel] = 1
No
Local Input
Enabled and Active
[Digital Inx Sel] = 3
No
Auto Input
Enabled and Active
[Digital Inx Sel] = 2
No
Comm Select Input
Enabled and Active:
[Digital Inx Sel] = 4
No
Drive is in
Hand/Local Mode
selected by AUTO key
(1)
No
Analog Input 1
Override Enabled & Active:
[Digital Inx Sel] = 14
No
Analog Input 2
Override Enabled & Active:
[Digital Inx Sel] = 15
Run as specified by P038 [Speed Reference].
Start and Direction commands come
No
P038 [Speed Reference]
= 4 or 5
No
Preset Inputs Active
T051/T052/T053 = 8
No
PID Enabled:
A152 [PID Ref Sel] ¹ 0
No
from P036 [Start Source].
Ye s
Ye s
Ye s
Ye s
Ye s
Ye s
Ye s
Ye s
Ye s
Ye s
Drive will Start and Run as
specified by A141 [Purge Frequency].
Direction is always Forward.
Start, Speed and Direction commands
come from Integral Keypad.
Direction is Forward unless an input is
programmed for "Keypad/Jog Direction"
Run as specified by
P038 [Speed Reference].
Start and Direction commands
come from P036 [Start Source].
Start, Speed and Direction commands
come from RS485 (DSI) port.
Start and Speed commands
come from Integral Keypad.
Direction is Forward unless an input is
programmed for "Cmd Reverse"
Speed commands come from
Analog Input 1 (I/O Terminal 13).
Start and Direction
follows P036 [Start Source].
Speed commands come from
Analog Input 2 (I/O Terminal 17).
Start and Direction
follows P036 [Start Source].
Run as specified by
P038 [Speed Reference].
Start and Direction commands come
from P036 [Start Source].
Run as specified by
A144-A146 [Preset Freq 1-3].
Start follows P036 [Start Source],
Direction follows
Preset Frequency settings.
Run as specified by
A152 [PID Ref Sel].
Start and Direction commands come
from P036 [Start Source].
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 37
Page 40

Chapter 1 Installation/Wiring
RS485 (DSI) Port
Controls Speed
No
Ye s
Either
P039 [Accel Time 1]/P040 [Decel Time 1]
or
A147 [Accel Time 2]/A148 [Decel Time 2]
can be selected when
RS485 (DSI) port is active.
Input is programmed
as "Acc & Dec 2"
[Digital Inx Sel] = 18
No
Ye s
A147 [Accel Time 2]/A148 [Decel Time 2]
is active when input is active.
Speed is controlled
by [Preset Freq x]
No
Ye s
P039 [Accel Time 1]/P040 [Decel Time 1];
A147 [Accel Time 2]/A148 [Decel Time 2]
determined by the active
Preset Frequency.
See A143-A146 [Preset Freq 0-3]
Drive is performing an
Auxiliary Motor AutoSwap
No
Ye s
A147 [Accel Time 2]/A148 [Decel Time 2]
are used.
P039 [Accel Time 1]/P040 [Decel Time 1]
are used.
Master
PowerFlex 400
Node 1
4
5
PowerFlex 400
Node 2
4
5
PowerFlex 400
Node "n"
4
5
TxRxD+
TxRxD-
TxRxD+
TxRxD-
TxRxD+
TxRxD-
NOTE: The shield should be grounded at ONLY ONE location.
Shield Shield Shield
120 ohm resistor
120 ohm resistor
FRONT
PIN 8
PIN 1
Accel/Decel Selection
The Accel/Decel rate can be obtained by a variety of methods. The default rate
is determined by P039
Accel/Decel rates can be made through digital inputs, RS485 (DSI)
communications and/or parameters. See the chart below for the override
priority.
[Accel Time 1] and P040 [Decel Time 1]. Alternative
RS485 Network Wiring
38 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Network wiring consists of a shielded 2-conductor cable that is daisy-chained
from node to node.
Figure 12 - Network Wiring Diagram
Only pins 4 and 5 on the RJ45 plug should be wired. The other pins on the
PowerFlex 400 RJ45 socket contain power, etc. for other Rockwell
Automation peripheral devices and must not be connected.
Page 41

Installation/Wiring Chapter 1
RS485 (DSI) Network Connection
Second RS485 (DSI) Connection
Wiring terminations on the master controller will vary depending on the
master controller used and “TxRxD+” and “TxRxD-” are shown for
illustration purposes only. Refer to the master controller’s user manual for
network terminations. Note that there is no standard for the “+” and “-” wires,
and consequently Modbus device manufacturers interpret them differently. If
you have problems with initially establishing communications, try swapping
the two network wires at the master controller.
On Drive Connections
PowerFlex 400 Frame D, E, F, G and H drives are equipped with two RS485
(DSI) ports. One is accessible via an access door when the cover is on and one is
only accessible with the cover off. When one of these ports has a Rockwell DSI
device connected, the second port cannot be used.
Figure 13 - Frame D, E, F, G and H RS485 Ports
EMC Instructions
CE Conformity
Conformity with the Low Voltage (LV) Directive and Electromagnetic
Compatibility (EMC) Directive has been demonstrated using harmonized
European Norm (EN) standards published in the Official Journal of the
European Communities. PowerFlex Drives comply with the EN standards
listed below when installed according to the User Manual.
CE Declarations of Conformity are available online at:
http://www.rockwellautomation.com/certification/overview.page
.
Low Voltage Directive (2014/35/EU)
• EN 61800-5-1 Electronic equipment for use in power installations.
EMC Directive (2014/30/EU)
• EN61800-3 Adjustable speed electrical power drive systems Part 3:
EMC product standard including specific test methods.
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 39
Page 42

Chapter 1 Installation/Wiring
General Notes
All Drive Frames
• The motor cable should be kept as short as possible in order to avoid
electromagnetic emission as well as capacitive currents.
• Use of line filters in ungrounded systems is not recommended.
• Conformity of the drive with CE EMC requirements does not
guarantee an entire machine installation complies with CE EMC
requirements. Many factors can influence total machine/installation
compliance.
Frame C Drives Only
• If the plastic top panel is removed or the optional conduit box is not
installed, the drive must be installed in an enclosure with side openings
less than 12.5 mm (0.5 in.) and top openings less than 1.0 mm (0.04 in.)
to maintain compliance with the LV Directive.
Essential Requirements for CE Compliance
Conditions 1...4 listed below must be satisfied for PowerFlex drives to meet
the requirements of EN61800-3.
1. Grounding as described in Figure 14
grounding recommendations.
2. Output power, control (I/O) and signal wiring must be braided,
shielded cable with a coverage of 75% or better, metal conduit or
equivalent attenuation.
3. All shielded cables should terminate with the proper shield connector.
4. Conditions in Ta b l e 1 2
Table 12 - PowerFlex 400 – EN61800-3 Compliance
PowerFlex 400 Drive First Environment Restricted First Environment Unrestric ted
kW
(HP)
200...240 Volts
2.2 (3.0) B012N103 22-RF034-CS 10 No 22-RF034-CS 1 Required
3.7 (5.0) B017N103 22-RF034-CS 10 No 22-RF034-CS 1 Required
5.5 (7.5) B024N103 22-RF034-CS 10 No 22-RF034-CS 1 Required
7.5 (10) B033N103 22-RF034-CS 10 No 22-RF034-CS 1 Required
11 (15) B049A103 22-RFD070 150 Required Deltron MIF Series 50 Required
15 (20) B065A103 22-RFD100 150 Required Deltron MIF Series 50 Required
18.5 (25) B075A103 22-RFD100 150 Required Deltron MIF Series 50 Required
22 (30) B090A103 22-RFD150 150 Required Deltron MIF Series 50 Required
Cat No.
22C-...
Required Filter
(Allen-Bradley)
.
Restrict
Motor
Cable to
(Meters)
. Refer to page 20 for additional
Install
Drive and
Filter in
Shielded
Enclosure
Required Filter Restrict
Motor
Cable to
(Meters)
Install
Drive and
Filter in
Shielded
Enclosure
40 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 43

Installation/Wiring Chapter 1
R/L1
S/L2
T/L3
U/T1
V/T2
W/T3
EMI Fittings and Metal Conduit
IP 30/NEMA 1/UL Type 1
Option Kit (Frame C Drives Only)
Shielded Enclosure
(1)
Building Structure Steel
Enclosure Ground Connection
EMI Filter
L1'
L2'
L3'
L1
L2
L3
Shielded Motor Cable
Table 12 - PowerFlex 400 – EN61800-3 Compliance
PowerFlex 400 Drive First Environment Restricted First Environment Unrestric ted
kW
(HP)
30 (40) B120A103 22-RFD150 150 No Deltron MIF Series 50 Required
37 (50) B145A103 22-RFD180 150 No Deltron MIF Series 75 Required
380...480 Volts
2.2 (3.0) D6P0N103 22-RF018-CS 10 No 22-RF018-CS 1 Required
4.0 (5.0) D010N103 22-RF018-CS 10 No 22-RF018-CS 1 Required
5.5 (7.5) D012N103 22-RF018-CS 10 No 22-RF018-CS 1 Required
7.5 (10) D017N103 22-RF018-CS 10 No 22-RF018-CS 1 Required
11 (15) D022N103 22-RF026-CS 10 No 22-RF026-CS 1 Required
15 (20) D030N103 22-RFD036 100 No Deltron MIF Series 5 Required
18.5 (25) D038A103 22-RFD050 150 No Deltron MIF Series 5 Required
22 (30) D045A103 22-RFD050 150 No Deltron MIF Series 5 Required
30 (40) D060A103 22-RFD070 50 No Deltron MIF Series 5 Required
37 (50) D072A103 22-RFD100 50 No Deltron MIF Series 5 Required
45 (60) D088A103 22-RFD100 50 No Deltron MIF Series 5 Required
55 (75) D105A103 22-RFD150 150 No Deltron MIF Series 5 Required
75 (100) D142A103 22-RFD180 50 No Deltron MIF Series 5 Required
90 (125) D170A103 22-RFD208 50 No 22-RFD208 5 Required
110 (150) D208A103 22-RFD208 50 No 22-RFD208 5 Required
132 (200) D260A103 22-RFD323 50 Required 22-RFD323 5 Required
160 (250) D310A103 22-RFD480 50 Required 22-RFD480 5 Required
200 (300) D370A103 22-RFD480 50 Required 22-RFD480 5 Required
250 (350) D460A103 22-RFD480 50 Required 22-RFD480 5 Required
Cat No.
22C-...
Required Filter
(Allen-Bradley)
Restrict
Motor
Cable to
(Meters)
Install
Drive and
Filter in
Shielded
Enclosure
Required Filter Restrict
Motor
Cable to
(Meters)
Install
Drive and
Filter in
Shielded
Enclosure
Figure 14 - Connections and Grounding
(1) Shielded Enclosure required to meet EN61800-3 First Environment Restricted for 200-240V AC 11-22 kW (15-30 HP) PowerFlex
400 drives and to meet EN61800-3 First Environment Unrestricted for all PowerFlex 400 ratings.
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 41
Page 44

Chapter 1 Installation/Wiring
FCC Instructions
FCC Compliance
This equipment has been tested and found to comply with the limits for a
Class A digital device, pursuant to Part 15 of the FCC Rules when installed
according to the User Manual. These limits are designed to provide reasonable
protection against harmful interference when the equipment is operated in a
commercial environment. This equipment generates, uses, and can radiate
radio frequency energy and if not installed and used in accordance with the
User Manual, may cause harmful interference to radio communications.
Operation of this equipment in a residential area is likely to cause harmful
interference in which case the user will be required to correct the interference
at their own expense.
Essential Requirements for FCC Compliance
Conditions 1...4 listed below must be satisfied for PowerFlex 400 drives to
meet the requirements of FCC Part 15 Subpart B.
1. Grounding as described in Figure 15
grounding recommendations.
2. Output power, control (I/O) and signal wiring must be braided,
shielded cable with a coverage of 75% or better, metal conduit or
equivalent attenuation.
. Refer to page 20 for additional
3. All shielded cables should terminate with the proper shield connector.
4. Conditions in Ta b l e 1 3
Table 13 - PowerFlex 400 – FCC Part 15 Subpart B Compliance
PowerFlex 400 Drive Required Filter Restrict Motor
kW (HP) Cat No.
200...240 Volts
2.2 (3.0) 22C-B012N103 22-RF034-CS 10 No
3.7 (5.0) 22C-B017N103 22-RF034-CS 10 No
5.5 (7.5) 22C-B024N103 22-RF034-CS 10 No
7.5 (10) 22C-B033N103 22-RF034-CS 10 No
11 (15) 22C-B049A103 22-RFD070 150 Required
15 (20) 22C-B065A103 22-RFD100 150 Required
18.5 (25) 22C-B075A103 22-RFD100 150 Required
22 (30) 22C-B090A103 22-RFD150 150 Required
30 (40) 22C-B120A103 22-RFD150 150 No
37 (50) 22C-B145A103 22-RFD180 150 No
380...480 Volts
2.2 (3.0) 22C-D6P0N103 22-RF018-CS 10 No
4.0 (5.0) 22C-D010N103 22-RF018-CS 10 No
5.5 (7.5) 22C-D012N103 22-RF018-CS 10 No
.
Cable to (Meters)
Install Drive and
Filter in Enclosure
42 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 45

Table 13 - PowerFlex 400 – FCC Part 15 Subpart B Compliance
Installation/Wiring Chapter 1
PowerFlex 400 Drive Required Filter Restrict Motor
kW (HP) Cat No.
Cable to (Meters)
Install Drive and
Filter in Enclosure
7.5 (10) 22C-D017N103 22-RF018-CS 10 No
11 (15) 22C-D022N103 22-RF026-CS 10 No
15 (20) 22C-D030N103 22-RFD036 100 No
18.5 (25) 22C-D038A103 22-RFD050 150 No
22 (30) 22C-D045A103 22-RFD050 150 No
30 (40) 22C-D060A103 22-RFD070 50 No
37 (50) 22C-D072A103 22-RFD100 50 No
45 (60) 22C-D088A103 22-RFD100 50 No
55 (75) 22C-D105A103 22-RFD150 150 No
75 (100) 22C-D142A103 22-RFD180 50 No
90 (125) 22C-D170A103 22-RFD208 50 No
110 (150) 22C-D208A103 22-RFD208 50 No
132 (200) 22C-D260A103 22-RFD323 50 Required
160 (250) 22C-D310A103 22-RFD480 50 Required
200 (300) 22C-D370A103 22-RFD480 50 Required
250 (350) 22C-D460A103 22-RFD480 50 Required
Figure 15 - Connections and Grounding
R/L1
S/L2
T/L3
(1)
IP 30/NEMA 1/UL Type 1
Option Kit (Frame C Drives Only)
EMI Fittings and Metal Conduit
Shielded Motor Cable
U/T1
V/T2
W/T3
Shielded Enclosure
EMI Filter
L1'
L1
L2'
L2
L3'
L3
Enclosure Ground Connection
Building Structure Steel
(1) Shielded Enclosure required for 200-240V AC 11-22 kW (15-30 HP) PowerFlex 400 drives.
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 43
Page 46

Chapter 1 Installation/Wiring
Notes:
44 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 47

Chapter 2
Start Up
This chapter describes how to start up the PowerFlex 400 Drive. To simplify
drive setup, the most commonly programmed parameters are organized in a
single Basic Program Group.
For information on... See page
Prepare For Drive Start-Up 45
Integral Keypad 47
Viewing and Editing Parameters 49
IMPORTANT Read the General Precautions section before proceeding.
Prepare For Drive Start-Up
ATT EN TI ON : Power must be applied to the drive to perform the following
start-up procedures. Some of the voltages present are at incoming line
potential. To avoid electric shock hazard or damage to equipment, only
qualified service personnel should perform the following procedure.
Thoroughly read and understand the procedure before beginning. If an event
does not occur while performing this procedure, Do Not Proceed. Remove
All Power including user supplied control voltages. User supplied voltages
may exist even when main AC power is not applied to the drive. Correct the
malfunction before continuing.
Before Applying Power to the Drive
1. Confirm that all inputs are connected to the correct terminals and are
secure.
2. Verify that AC line power at the disconnect device is within the rated
value of the drive.
3. Verify that any digital control power is 24 volts.
4. Verify that the Sink (SNK)/Source (SRC) Setup DIP Switch is set to
match your control wiring scheme. See Tab le 9 on pa ge 3 0
for location.
IMPORTANT The default control scheme is Source (SRC). The Stop terminal is jumpered (I/
O Terminals 01 and 11) to allow starting from the keypad. If the control
scheme is changed to Sink (SNK), the jumper must be removed from I/O
Terminals 01 and 11 and installed between I/O Terminals 01 and 04.
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 45
Page 48

Chapter 2 Start Up
5. Verify that the Stop input is present or the drive will not start.
IMPORTANT If I/O Terminal 01 is used as a stop input, the jumper between I/O Terminals
01 and 11 must be removed.
6. Verify that the Analog I/O DIP Switches are set to 10 volts.
Applying Power to the Drive
7. Apply AC power and control voltages to the drive.
8. . 8. Familiarize yourself with the integral keypad features (see page 47
before setting any Program Group parameters.
)
Start, Stop, Direction and Speed Control
Factory default parameter values allow the drive to be controlled from the
integral keypad. No programming is required to start, stop, and control speed
directly from the integral keypad.
If a fault appears on power up, refer to Fault Descriptions
explanation of the fault code.
on page 115 for an
46 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 49

Integral Keypad
Operator Keys
Key Name Description
Escape Back one step in programming menu.
Cancel a change to a parameter value and exit Program
Mode.
Select Advance one step in programming menu.
Select a digit when viewing parameter value.
Up Arrow
Down Arrow
Enter Advance one step in programming menu.
Digital Speed Increment and
Decrement Arrows
Run/Start & Hand
(1)
Auto
(1)
Used to select Auto control mode.
Scroll through groups and parameters.
Increase/decrease the value of a flashing digit.
Save a change to a parameter value.
Used to control speed of drive. Default is active.
Control is activated by parameter P038 [Speed
Reference] or P042 [Auto Mode].
Used to start the drive. Default is Hand mode as
controlled by parameter P042 [Auto Mode].
Control is activated by parameter P036 [Start Source] or
P042 [Auto Mode].
Controlled by parameter P042
Start Up Chapter 2
[Auto Mode].
Stop/Off Used to stop the drive or clear a fault.
This key is always ac tive.
Controlled by parameter P037
(1) Important: Certain digital input settings can override drive operation. Refer to Start and Speed Reference Control on page 37
for details.
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 47
[Stop Mode].
Page 50

Chapter 2 Start Up
2
1
3
4
5
LED Status Indicators
LED LED State Description
Program Status Steady Red Indicates parameter value can be changed.
Selected digit will flash.
Fault Status Flashing Red Indicates that the drive is faulted.
Speed Status Steady Green Indicates that the digital speed control keys are enabled.
Hand Status Steady Green Indicates that the Run/Start key is enabled.
Auto Status Steady Yellow Indicates that the drive is in Auto mode.
LCD Display
No. Description
1Parameter Name
2 Run/Stop Status: = Stopped / = Running
flashes to indicate that the drive is stopping, but is still decelerating.
flashes when DC Injection is commanded.
Direction Indication: The Directio n Arrow indicates the commanded direction of rotation. If the
Arrow is flashing, the drive has been commanded to change direction, but is still decelerating.
Sleep Mode Indication: flashes to indicate that the drive is in sleep mode.
3 Parameter Group and Number:
= Basic Display = Basic Program = Terminal Block
= Communications = Advanced Program = Aux Relay Card
= Advanced Display
4 Fault Indication and Fault Number
5Fault Name
48 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 51

Start Up Chapter 2
Viewing and Editing Parameters
The last user-selected Basic Display Group parameter is saved when power is
removed and is displayed by default when power is reapplied. The following is
an example of basic integral keypad and display functions. This example
provides basic navigation instructions and illustrates how to program the first
Basic Program Group parameter.
Step Key(s) Example Displays
1. When power is applied, the last user-selected
Basic Display Group parameter number is
displayed with flashing characters. The display
then defaults to that parameter’s current
value. (Example shows the value of b001
[Output Freq] with the drive stopped.)
2. Press the Up Arrow or Down Arrow to scroll
through the Basic Display Group parameters.
(Only in Display Groups)
3. Press Esc once to display the Basic Display
Group parameter number shown on powerup. The parameter number will flash.
4. Press Esc again to enter the group menu. The
group menu letter will flash.
5. Press the Up Arrow or Down Arrow to scroll
through the group menu (b, P, T, C, A and d).
6. Press Enter or Sel to enter a group. The right
digit of the last viewed parameter in that
group will flash.
7. Press the Up Arrow or Down Arrow to scroll
through the parameters that are in the group.
or
or
or
or
8. Press Enter or Sel to view the value of a
parameter. If you do not want to edit the
value, press Esc to return to the parameter
number.
9. Press Enter or Sel to enter program mode to
edit the parameter value. The right digit will
flash and the Program LED will illuminate if
the parameter can be edited.
10.If desired, press Sel to move from digit to digit
or bit to bit. The digit or bit that you can
change will flash.
11.Press the Up Arrow or Down Arrow to change
the parameter value.
12.Press Esc to cancel a change. The digit will stop
flashing, the previous value is restored and the
Program LED will turn off.
Or Press Enter to save a change. The digit will
stop flashing and the Program LED will turn
off.
13.Press Esc to return to the parameter list.
Continue to press Esc to back out of the
programming menu.
If pressing Esc does not change the display,
then b001
[Output Freq] is displayed. Press
Enter or Sel to enter the last group menu
viewed.
The Basic Program Group (page 61
) contains the most commonly changed parameters.
or
or
or
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 49
Page 52

Chapter 2 Start Up
Keypad Hand-Off-Auto Functions
Parameter P042 [Auto Mode] defines the operation mode of the control keys
on the integral keypad.
Hand-Off-Auto Mode
In HAND mode:
• Control keys operate as Hand-Off-Auto.
• Start command and speed reference come from the integral keypad
Start/Hand and Digital Speed Increment and Decrement keys.
• Auto key switches control from HAND mode to AUTO mode in a
bumpless transfer as long as there is an active Run command.
In AUTO mode:
•Auto key LED is illuminated.
• Start command is defined by P036
• Speed Reference command is defined by P038
• Start/Hand key switches control to the integral keypad in a bumpless
transfer and switches the speed reference to the integral keypad.
• Stop key stops the drive and the drive switches to HAND mode.
[Start Source].
[Speed Reference].
Table 14 - P042 [Auto Mode] = 1 “Hnd-Off-Auto” (Default)
T051-T054 [Digital Inx Sel] ≠ 2 “Auto Mode” or 3 “Local”
HAND Mode AUTO Mode
Key LED Key Function LED Key Function
On Starts drive.
Runs according to Speed Increment/
Decrement keys.
On Changes speed. Off Not active.
Off Changes to AUTO Mode. On Not active.
N/A Stops drive. N/A Changes to HAND Mode and Stops
On Changes to HAND Mode and Starts
drive.
Runs according to Speed Increment/
Decrement keys.
Keys are only active if P038 [Speed
Source] = 0 “Drive Pot”.
drive.
IMPORTANT Certain digital input settings can override drive operation.
Refer to Start and Speed Reference Control
50 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
on page 37 for details.
Page 53

Start Up Chapter 2
Local/Remote Mode
In Local mode:
• Start command and speed reference come from the integral keypad
Start/Hand and Digital Speed Increment and Decrement keys.
• Auto key stops the drive and the drive switches to Remote mode.
IMPORTANT If the drive is running and P036 [Start Source] = 3 or 6 (2-Wire Control), the
drive will continue to run at reference defined by P038 [Speed Reference] if a
valid start command is present
In Remote mode:
•Auto key LED is illuminated.
• Start command is defined by P036
• Speed Reference command is defined by P038
• Auto key stops the drive and the drive switches to Local mode.
Table 15 - P042 [Auto Mode] = 2 “Local/Remote”
T051-T054 [Digital Inx Sel] ≠ 2 “Auto Mode” or 3 “Local”
[Start Source].
[Speed Reference].
Local Mode Remote Mode
Key LED Key Function LED Key Function
On Starts drive.
Runs according to Speed Increment/
Decrement keys.
On Changes speed. Off Not active.
Off Stops drive and changes to Remote
Mode.
N/A Stops drive. N/A Changes to HAND Mode and Stops
Off Not active.
Only active if P036 [Start Source] = 0
“Keypad”. Starts drive.
Keys are only active if P038 [Speed
Source] = 0 “Drive Pot”.
On Stops drive and changes to Local
Mode.
drive.
IMPORTANT Certain digital input settings can override drive operation.
Refer to Start and Speed Reference Control
on page 37 for details.
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 51
Page 54

Chapter 2 Start Up
Auto/Manual Mode
In Manual mode:
• Start command is defined by P036
• Speed Reference command is defined by the Digital Speed Increment
and Decrement keys.
• Auto key toggles frequency control to AUTO in a bumpless transfer.
In AUTO mode:
•Auto key LED is illuminated.
• Start command is defined by P036
• Speed Reference command is defined by P038
• Auto key switches frequency control to the integral keypad in a
bumpless transfer.
Table 16 - P042 [Auto Mode] = 2 “Auto/Manual”
T051-T054 [Digital Inx Sel] ≠ 2 “Auto Mode” or 3 “Local”
Manual Mode AUTO Mode
Key LED Key Function LED Key Function
Off Not active.
Only active if P036 [Start Source] = 0
“Keypad”. Starts drive.
Runs according to Speed Increment/
Decrement keys.
On Changes speed. Off Not active.
[Start Source].
[Start Source].
[Speed Reference].
Off Not active.
Only active if P036 [Start Source] = 0
“Keypad”. Starts drive.
Keys are only active if P038 [Speed
Source] = 0 “Drive Pot”.
Off Changes to AUTO Mode.
If running, drive will continue to run
at reference defined by P038 [Speed
Reference].
N/A Stops drive. N/A Stops drive.
IMPORTANT Certain digital input settings can override drive operation.
Refer to Start and Speed Reference Control
52 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
On Changes to Manual Mode.
If running, drive will continue to run
according to Digital Speed Increment
and Decrement keys.
on page 37 for details.
Page 55

No Function Mode
In No Function mode:
•Auto key LED has no function.
• Start command is defined by P036
• Speed Reference command is defined by P038
Table 17 - P042 [Auto Mode] = 0 “No Function”
T051-T054 [Digital Inx Sel] ≠ 2 “Auto Mode” or 3 “Local”
Key LED Key Function
Off Not active.
Only active if P036 [Start Source] = 0
“Keypad”. Starts drive.
On Not active.
Only active if P038 [Speed Reference]
= 0 “Drive Pot”. Changes drive speed.
Off Not active.
[Start Source].
Start Up Chapter 2
[Speed Reference].
N/A Stops drive.
IMPORTANT Certain digital input settings can override drive operation.
Refer to Start and Speed Reference Control
on page 37 for details.
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 53
Page 56

Chapter 2 Start Up
Notes:
54 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 57

Chapter 3
Programming and Parameters
This chapter provides a complete listing and description of the PowerFlex 400
parameters. Parameters are programmed (viewed/edited) using the integral
keypad. As an alternative, programming can also be performed using
DriveExecutive™ software or Connected Components WorkBench™ version 1.0
or greater software, a personal computer and a serial converter module. Refer to
Appendix B
In addition programming can also be performed using design software RS
Logix 5000 version 16.0 or greater or Studio 5000 version 21.0 or greater with
appropriate communication option kits and accessories listed in Appendix B
For information on... See page
About Parameters 55
Param eter Organizat ion 56
Basic Display Group 58
Basic Program Group 61
Terminal Block Group 66
Communications Group 79
Advanced Program Group 83
Aux Relay Card Group 98
Advanced Display Group 83
Parameter Cross Reference by Name 110
for catalog numbers.
.
About Parameters
To configure a drive to operate in a specific way, drive parameters may have to
be set. Three types of parameters exist:
• ENUM
ENUM parameters allow a selection from 2 or more items. Each item is
represented by a number.
• Numeric Parameters
These parameters have a single numerical value (0.1V).
• Bit Parameters
Bit parameters have four or more individual bits associated with features
or conditions. If the bit is 0, the feature is off or the condition is false. If
the bit is 1, the feature is on or the condition is true.
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 55
Page 58

Chapter 3 Programming and Parameters
32
Basic
Display Group
Basic
Program Group
Terminal
Block Group
Communications
Group
Some parameters are marked as follows.
= Stop drive before changing this parameter.
= 32 bit parameter. Parameters marked 32 bit will have two parameter numbers when using RS485
communications and programming software.
Parameter Organization
Refer to page 110 for an alphabetical listing of parameters.
Basic Display Output Freq b001
Commanded Freq b002
Output Current b003
Output Voltage b004
Basic Program Motor NP Volts P031
Motor NP Hertz P032
Motor OL Current P033
Minimum Freq P034
Ter mina l Bl ock Digital In1 Sel T051
Digital In2 Sel T052
Digital In3 Sel T053
Digital In4 Sel T054
Relay Out1 Sel T055
Relay Out1 Level T056
Relay 1 On Time T058
Relay 1 Off Time T059
Relay Out2 Sel T060
Relay Out2 Level T061
Communication Language C101
Comm Format C102
Comm Data Rate C103
DC Bus Voltage b005
Drive Status b006
Fault 1 Code b007
Process Display b008
Maximum Freq P035
Start Source P036
Stop Mode P037
Relay 2 On Time T063
Relay 2 Off Time T064
Opto Out Sel T065
Opto Out Level T066
Opto Out Logic T068
Analog In 1 Sel T069
Analog In 1 Lo T070
Analog In 1 Hi T071
Analog In 1 Loss T072
Analog In 2 Sel T073
Comm Node Addr C104
Comm Loss Action C105
Output Power b010
Elapsed MWh b011
Elapsed RunTime b012
Speed Reference P038
Accel Time 1 P039
Decel Time 1 P040
Analog In 2 Lo T074
Analog In 2 Hi T075
Analog In 2 Loss T076
Sleep-Wake Sel T077
Sleep Level T078
Sleep Time T079
Wake Level T0 80
Wake Time T081
Analog Out1 Sel T082
Comm Loss Time C106
Comm Write Mode C107
Tor que Cu rre nt b0 13
Drive Temp b014
Elapsed kWh b015
Reset To Defalts P041
Auto Mode P042
Motor OL Ret P043
Analog Out1 High T083
Analog Out1 Setpt T084
Analog Out2 Sel T085
Analog Out2 High T086
Analog Out2 Setpt T087
Anlg Loss Delay T088
Analog In Filter T089
Sleep Sel T090
Wake Sel T091
Start Sou rce 2 C108
Speed Ref 2 C109
56 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 59

Programming and Parameters Chapter 3
Advanced
Program Group
Aux Relay
Card Group
Advanced
Display Group
Advanced Program Purge Frequency A141
Internal Freq A142
Preset Freq 0 A143
Preset Freq 1 A144
Preset Freq 2 A145
Preset Freq 3 A146
Accel Time 2 A147
Decel Time 2 A148
S Curve % A149
PID Trim Hi A150
PID Trim Lo A151
PID Ref Sel A152
PID Feedback Sel A153
PID Prop Gain A154
PID Integ Time A155
PID Diff Rate A156
PID Setpoint A157
Aux Relay Card Relay Out3 Sel R221
Relay Out3 Level R222
Relay Out4 Sel R224
Relay Out4 Level R225
Relay Out5 Sel R227
Relay Out5 Level R228
Relay Out6 Sel R230
Advanced Display Control Source d301
Contrl In Status d302
Comm Status d303
PID Setpnt Displ d304
Analog In 1 d305
Analog In 2 d306
Fault 1 Code d307
Fault 2 Code d308
Fault 3 Code d309
Fault 1 Time-hr d310
Fault 1 Time-min d311
Fault 2 Time-hr d312
Fault 2 Time-min d313
PID Deadband A158
PID Preload A159
Process Factor A160
Auto Rstrt Tries A163
Auto Rstrt Delay A164
Start At PowerUp A165
Reverse Disable A166
Flying Start En A167
PWM Frequency A168
PWM Mode A169
Boost Select A170
Start Boost A171
Break Voltage A172
Break Frequency A173
Maximum Voltage A174
Slip Hertz @ FLA A175
DC Brake Time A176
Relay Out6 Level R231
Relay Out7 Sel R233
Relay Out7 Level R234
Relay Out8 Sel R236
Relay Out8 Level R237
Aux Motor Mode R239
Aux Motor Qty R240
Fault 3 Time-hr d314
Fault 3 Time-min d315
Elapsed Time-hr d316
Elapsed Time-min d317
Output Powr Fctr d318
Testpoint Data d319
Control SW Ver d320
Drive Type d321
Output Speed d322
Output RPM d323
Fault Frequency d324
Fault Current d325
Fault Bus Volts d326
DC Brake Level A177
DC Brk Time@Strt A178
Current Limit 1 A179
Current Limit 2 A180
Motor OL Select A181
Drive OL Mode A182
SW Current Trip A183
Load Loss Level A184
Load Loss Time A 185
Stall Fault Time A186
Bus Reg Mode A187
Skip Frequency 1 A188
Skip Freq Band 1 A189
Skip Frequency 2 A190
Skip Freq Band 2 A191
Skip Frequency 3 A192
Skip Freq Band 3 A193
Aux 1 Start Freq R241
Aux 1 Stop Freq R242
Aux 1 Ref Add R243
Aux 2 Start Freq R244
Aux 2 Stop Freq R245
Aux 2 Ref Add R246
Aux 3 Start Freq R247
Status @ Fault d327
PID Fdbk Display d328
DC Bus Ripple V d329
Fault 4 Code d330
Fault 5 Code d331
Fault 6 Code d332
Fault 7 Code d333
Fault 8 Code d334
Fault 9 Code d335
Fault 10 Code d336
Fault 4 Time-hr d337
Fault 4 Time-min d338
Compensation A194
Reset Meters A195
Testpoint Sel A196
Fault Clear A197
Program Lock A198
Motor NP Poles A199
Motor NP FLA A200
PID Invert Error A201
MOP Reset Sel A202
Wake Dev iati on A20 3
ACT1 Input A204
ACT2 Input A205
ACT1 Minimum A206
ACT1 Maximum A207
ACT2 Minimum A208
ACT2 Maximum A209
Wake PID Preload A210
Aux 3 Stop Freq R2 48
Aux 3 Ref Add R249
Aux Start Delay R250
Aux Stop Delay R251
Aux Prog Delay R252
Aux AutoSwap Tme R253
Aux AutoSwap Lvl R254
Fault 5 Time-hr d339
Fault 5 Time-min d340
Fault 6 Time-hr d341
Fault 6 Time-min d342
Fault 7 Time-hr d343
Fault 7 Time-min d344
Fault 8 Time-hr d345
Fault 8 Time-min d346
Fault 9 Time-hr d347
Fault 9 Time-min d348
Fault10 Time-hr d349
Fault10 Time-min d350
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 57
Page 60

Chapter 3 Programming and Parameters
IMPORTANT
The frequency command can come from a number of sources. See Start and Speed Reference Control on page 37 for more information.
1 = Condition True, 0 = Condition False
Running Bit 1
Forw ard Bi t 2
Accelerating Bit 3
Decelerating Bit 4
Basic Display Group
b001 [Output Freq] Related Parameter(s): b002, b008, P034, P035, P038
Output frequency present at T1, T2 & T3 (U, V & W).
Values Default: Read Only
Min/Max: 0.00/P035
Display: 0.01 Hz
b002 [Commanded Freq] Related Parameter(s): b001, P034, P035, P038, d302
Value of the active frequency command. Displays the commanded frequency even if the drive is not running.
Values Default: Read Only
Min/Max: 0.00/P035 [Maximum Freq]
Display: 0.01 Hz
b003 [Output Current]
The output current present at T1, T2 & T3 (U, V & W).
Values Default: Read Only
Min/Max: 0.0/(Drive Rated Amps × 2)
Display: 0.1 Amps
[Maximum Freq]
b004 [Output Voltage] Related Parameter(s): P031, A170, A174
Output voltage present at terminals T1, T2 & T3 (U, V & W).
Values Default: Read Only
Min/Max: 0/510
Display: 1 VAC
b005 [DC BusVoltage]
Present DC bus voltage level.
Values Default: Read Only
Min/Max: 0/820
Display: 1 VDC
b006 [Drive Status] Related Parameter(s): A166
Present operating condition of the drive.
Values Default: Read Only
Min/Max: 0/1
Display: 1
58 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 61

Programming and Parameters Chapter 3
32
Output
Freq
Process
Display
Process
Fac tor
x=
b007 [Fault 1 Code] Related Parameter(s): A186
, A197, d307...d315
A code that represents a drive fault. [Fault 1 Code] is the most recent fault. Repetitive faults will only be recorded once.
Refer to Chapter 4
for fault code descriptions.
Values Default: Read Only
Min/Max: 0/122
Display: 1
b008 [Process Display] Related Parameter(s): b001, A160
32 bit parameter.
Output frequency scaled by A160 [Process Factor]
Values Default: Read Only
Min/Max: 0.00/9999
Display: 0.01 – 1
b010 [Output Power]
Output power present at T1, T2 & T3 (U, V & W).
Values Default: Read Only
Min/Max: 0.0/999.9 kW
Display: 0.1 kW
b011 [Elapsed MWh] Related Parameter(s): b015, A195
Accumulated output energy of the drive.
Values Default: Read Only
Min/Max: 0/3276.7 MWh
Display: 0.1 MWh
b012 [Elapsed Run Time] Related Parameter(s): A195
Displays the accumulated time that the drive has output power since the last A195 [Reset Meter].
Time is displayed in 10 hour increments.
Values Default: Read Only
Min/Max: 0/9999 Hrs
Display: 1 = 10 Hrs
b013 [Torque Current]
Displays the torque portion of the output current.
Values Default: Read Only
Min/Max: 0.0/(Drive Rated Amps × 2)
Display: 0.1 Amps
b014 [Drive Temp]
Present operating temperature of the drive power section.
Values Default: Read Only
Min/Max: 0/120 degC
Display: 1 degC
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 59
Page 62

Chapter 3 Programming and Parameters
b015 [Elapsed kWh] Related Parameter(s): b011
Accumulated output energy of the drive. This parameter works in conjunction with [Elapsed MWh]. When the maximum value of this parameter is reached, this parameter resets to
zero and [Elapsed MWh] is incremented.
Values Default: Read Only
Min/Max: 0.0/100.0 kWh
Display: 0.1 kWh
, A195
60 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 63

Programming and Parameters Chapter 3
Basic Program Group
P031 [Motor NP Volts] Related Parameter(s): b004, A170, A171, A172, A173
Stop drive before changing this parameter.
Set to the motor nameplate rated volts.
Values Default: Based on Drive Rating
Min/Max: 20/Drive Rated Volts
Display: 1 VAC
P032 [Motor NP Hertz] Related Parameter(s): A170, A171, A172, A173, A181, A182
Stop drive before changing this parameter.
Set to the moto r nameplate rated frequency.
Values Default: 60 Hz
Min/Max: 15/320 Hz
Display: 1 Hz
P033 [Motor OL Current] Related Parameter(s): P042, T055, T060, T065, A175, A179, A180, A181, A183
Set to the maximum allowable motor current. The drive will fault on an F7 Motor Overload if the value of this parameter is exceeded by 150% for 60 seconds.
Values Default: Drive Rated Amps
Min/Max: 0.0/(Drive Rated Amps × 2)
Display: 0.1 Amps
P034 [Minimum Freq] Related Parameter(s): b001, b002, P035, T070, T074, A171, A172, A173, d302
Set to the maximum allowable motor current. The drive will fault on an F7 Motor Overload if the value of this parameter is exceeded by 150% for 60 seconds.
Values Default: Drive Rated Amps
Min/Max: 0.0/(Drive Rated Amps × 2)
Display: 0.1 Amps
P035 [Maximum Freq] Related Parameter(s): b001, b002, P034, T071, T075, T082, T083, T085, T086, A171, A172, A173, d302
Stop drive before changing this parameter.
Sets the highest frequency the drive will output.
Values Default: 60.0 Hz
Min/Max: 0.0/320.0 Hz
Display: 0.1 Hz
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 61
Page 64

Chapter 3 Programming and Parameters
IMPORTANT
For all settings except options 3 and 6, the drive must receive a leading edge from the start input for the drive to start after a stop input, loss of power or
fault condition.
ATT EN TI ON : Hazard of injury exists due to unintended operation. When P036 [Start Source] is set to
option 3 or option 6, and the Run input is maintained, the Run inputs do not need to be toggled after a
Stop input or a fault clear for the drive to run again. The drive will stop only when the stop command is
maintained or the drive is faulted.
ATT EN TI ON : When operating in 2-Wire Level Sense (Run Level), the drive should only be controlled from
the Digital Input Terminal Blocks. This should NOT be used with any other DSI or Network device.
IMPORTANT
There is greater potential voltage on the output terminals when using this option.
ATT EN TI ON : Hazard of injury exists due to unintended operation. When P036 [Start Source] is set to
option 3 or option 6, and the Run input is maintained, the Run inputs do not need to be toggled after a
Stop input or a fault clear for the drive to run again. The drive will stop only when the stop command is
maintained or the drive is faulted.
P036 [Start Source] Related Parameter(s): P037
Stop drive before changing this parameter.
Sets the control scheme used to start the drive when in Auto/Remote mode.
Refer to Start and Speed Reference Control on page 37 for details about how other drive settings can override the setting of this parameter.
Options 0 “Keypad” Integral keypad controls drive operation.
1 “3-Wire” I/O Terminal Block controls drive operation.
2 “2-Wire” I/O Terminal Block controls drive operation.
3 “2-W Lvl Sens” (Default) I/O Terminal Block controls drive operation.
• I/O Terminal 01 = Stop: Coast to Stop
• I/O Terminal 02 = Not Used
• I/O Terminal 03 = Not Used
• I/O Terminal 01 = Stop: Per P037
• I/O Terminal 02 = Start
• I/O Terminal 03 = Direction
• I/O Terminal 01 = Stop: Coast to Stop
• I/O Terminal 02 = Run FWD
• I/O Terminal 03 = Run REV
• I/O Terminal 01 = Stop: Coast to Stop
• I/O Terminal 02 = Run FWD
• I/O Terminal 03 = Run REV
Drive will restart after a “Stop” command when:
• Stop is removed and Run FWD is held active
[Stop Mode]
, P042, A166, d301
4 “2-W Hi Speed” I/O Terminal Block controls drive operation.
5 “Comm Port” Remote communications controls drive operation.
6 “2-W Lvl/Enbl” I/O Terminal Block controls drive operation.
62 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
• I/O Terminal 01 = Stop: Coast to Stop
• I/O Terminal 02 = Run FWD
• I/O Terminal 03 = Run REV
Outputs are kept in a ready-to-run state. The drive will respond to a “Start” command within 10 ms.
• I/O Terminal 01 = Stop: Coast to Stop
• I/O Terminal 02 = Not Used
• I/O Terminal 03 = Not Used
• I/O Terminal 01 = Function Loss: Fault and Coast to Stop
• I/O Terminal 02 = Run FWD
• I/O Terminal 03 = SW Enable
Drive will restart after a “Stop” command when:
• Stop is removed and Run FWD is held active
Page 65

Programming and Parameters Chapter 3
IMPORTANT
I/O Terminal 01 is always a coast to stop input except when P036 [Start Source] is set for “3-Wire” control. When in three wire control, I/O Terminal 01 is
controlled by P037 [Stop Mode].
P037 [Stop Mode] Related Parameter(s): P036
, C105, A176, A177, A178
Active stop mode for all stop sources [e.g. keypad, run forward (I/O Terminal 02), run reverse (I/O Terminal 03), RS485 port] except as noted below.
Hardware Enable Circuitry
By default, I/O Terminal 01 is a coast to stop input. The status of the input is inter preted by drive software. If the application requires the drive to be disabled without software
interpretation, a “dedicated” hardware enable configuration can be utilized. This is accomplished by removing the ENBL enable jumper on the control board. See page 29 for details.
In this case, the drive will always coast to a stop regardless of the settings of P036 [Start Source] and P037 [Stop Mode].
Options 0 “Ramp, CF”
1“Coast, CF”
2“DC Brake, CF”
3“DCBrkAuto,CF”
(1)
(1)
(Default) Coast to Stop. “Stop” command clears active fault.
(1)
DC Injection Braking Stop. “Stop” command clears active fault.
(1)
DC Injection Braking Stop with Auto Shutoff.
Ramp to Stop. “Stop” command clears ac tive fault.
• Standard DC Injection Braking for value set in A176 [DC Brake Time].
OR
• Drive shuts off if the drive detects that the motor is stopped.
“Stop” command clears active fault.
4 “Ramp” Ramp to stop.
5 “Coa st” Coast to stop.
6 “DC Brake” DC Injection Braking Stop.
7 “DC BrakeAuto” DC Injection Braking Stop with Auto Shutoff.
• Standard DC Injection Braking for value set in A176
[DC Brake Time]
OR
• Drive shuts off if the drive detects that the motor is stopped.
(1) Stop input also clears active fault.
P038 [Speed Reference] Related Parameter(s ): b001, b002, P038, P040, P042, T051...T054, T070, T071, T073, T074, T075, C102, A141, A142, A143...A146, A152, d301
Sets the source of the speed reference to the drive.
The drive speed command can be obtained from a number of different sources. The source is normally determined by P038 [Speed Reference]. However, when T051...T054 [Digital
Inx Sel] is set to option 1, 2, 3, 4, 5, 8, 14, 15, 16, 17 and the digital input is active, or if A152 [PID Ref Sel] is not set to option 0, the speed reference commanded by P038 [Speed
Reference] will be overridden. Refer to the flowchart on page 37 for more information on speed reference control priority.
Options 0 “Drive Keypad” Internal frequency command from the digital speed keys on the integral keypad.
1 “InternalFreq” Internal frequency command from A142
2 “Analog In 1” (Default) External frequency command from an analog source as determined by T069
[Internal Freq]. Must be set when using MOP function.
[Analog In 1 Sel] and DIP Switch AI1 on the control
board. Default Dip Switch setting is 10V.
3 “Analog In 2” External frequency command from an analog source as determined by T073 [Analog In 2 Sel] and DIP Switch AI2 on the control
board. Default Dip Switch setting is 10V.
4 “Preset Freq” External frequency command as defined by A141
...A146 [Preset Freq x] when T051...T054 [Digital Inx Sel] are programmed as
“Preset Frequencies” and the digital inputs are active.
5 “Comm Port” External frequency command from the communications port. Refer to Appendix E and Appendix G for details. Parameter C102
[Comm Format] is used to select a communications protocol.
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 63
Page 66

Chapter 3 Programming and Parameters
Maximum Freq
Accel Rate
Accel Time
=
Speed
0
Time
P035 [Maximum Freq]
P039 or A147
[Accel Time x]
P040 or A148
[Decel Time x]
0
Acceleratio
n
Deceleration
Maximum Freq
Decel Rate
Decel Time
=
Speed
0
Time
P035 [Maximum Freq]
P039 or A147
[Accel Time x]
P040 or A148
[Decel Time x]
0
Acceleration
Deceleration
IMPORTANT
Drives packaged for fan and pump applications ship with custom default settings that differ from Factory Defaults. Setting this parameter to option 1 will
require reprogramming of selec t parameters. Refer to publication 22C-IN002
for packaged drive default settings.
P039 [Accel Time 1] Related Parameter(s): P038
, P040, T051...T054, A141, A143...A146, A147
Sets the rate of acceleration for all speed increases.
Values Default: 20.00 Secs 2.2-110 kW (3.0-150 HP)
60.00 Secs 132-250 kW (200-350 HP)
Min/Max: 0.00/600.00 Secs
Display: 0.01 Secs
P040 [Decel Time 1] Related Parameter(s): P038, P039, T051...T054, A141, A143...A146, A148
Sets the rate of deceleration for all speed decreases.
Values Default: 20.00 Secs 2.2-110 kW (3.0-150 HP)
60.00 Secs 132-250 kW (200-350 HP)
Min/Max: 0.00/600.00 Secs
Display: 0.01 Secs
P041 [Reset to Defalts]
Stop drive before changing this parameter.
Resets all parameter values to factory defaults.
Options 0 “Ready/Idle” (Default)
1 “Factor y Rset” • After the reset function is complete, this parameter will set itself back to “0 ”.
• Causes an F48 Params Defaulted
fault.
P042 [Auto Mode] Related Parameter(s): P036, P038
Stop drive before changing this parameter.
Determines the operation of the “Auto” key on the integral keypad. Refer to page 50 for details.
Options 0 “No function” LED above “Auto” key is always dark.
1 “Hnd-Off-Auto” (Default) Toggles control start and frequency to and from keypad; starts drive.
2 “Local/Remote” Toggles control start and frequency to and from keypad.
3 “Auto/Manual” Toggles only the frequency control to and from keypad.
64 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 67

Programming and Parameters Chapter 3
P043 [Motor OL Ret] Related Parameter(s): P033
Enables/disables the Motor Overload Retention function. When Enabled, the value held in the motor overload counter is saved at power-down and restored at power-up.
Options 0 “Disabled” (Default)
1“Enabled”
, A181
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 65
Page 68

Chapter 3 Programming and Parameters
ATT EN TI ON : A Purge command will take precedence over a stop command from the Comm Port/
Network and over a SW Enable command from the terminal block. Insure that another stop method is
available, such as I/O Terminal 01 of the control terminal block, if stopping is necessary during a purge.
Terminal Block Group
T051 [Digital In1 Sel] (I/O Terminal 05) Related Parameter(s):P036, P038, P039, P040 A141, A142, A143...A146, A147, A148, A166, A177, A180, d301, d302
T052 [Digital In2 Sel] (I/O Terminal 06)
T053 [Digital In3 Sel] (I/O Terminal 07)
T054 [Digital In4 Sel] (I/O Terminal 08)
Stop drive before changing this parameter.
Selects the function for the digital inputs. Refer to the flowchart on page 37 for more information on speed reference control priority.
Options 0 “Not Used” Terminal has no function but can be read over network communications via d302
1 “Purge”
(1)
(T051 Default) Starts the drive at Purge speed regardless of the selected start source. Purge can occur, and is operational, at any time whether
the drive is running or stopped. If a valid stop condition is present, other than from the Comm Port or SW Enable input (I/O
Terminal 03), the drive will not start on the Purge Input Transition.
[Contrl In St atus].
2 “Auto Mode” (1) When active, forces drive into “Auto” control mode. Start source determined by P036
3 “Local” (1) (T052 Default) When active, sets integral keypad as start source and digital speed keys on the integral keypad as speed source.
4 “Comm Port” (1) (T054 Default) When active, sets communication device as default start/ speed command source.
5 “PID Disable” Disables PID function. Drive uses the next valid non-PID speed reference.
6 “PID Hold” Drive output remains at current value.The integrator for Process PID loop is also clamped at current value.
7 “PID Reset” The integrator for the Process PID loop is reset to zero and drive output is set to Preload value.
8 “Preset Freq” Preset speed inputs that enable the use of preset speeds.
9 “Aux Fault” If input is enable but not active, the drive will immediately fault.
10 “Clear Fault” (T053 Default) Clears an active fault.
11 “RampStop,CF” The drive immediately ramps to stop. Can also be used to clear a fault.
12 “CoastStop,CF” The drive immediately coasts to stop. Can also be used to clear a fault.
13 “DCInjStop,CF” The drive immediately begins a DC In jection stop. Can also be used to clear a fault.
14 “Anlg1 InCtrl” (1) Selects Analog Input 1 control for the frequency reference.
15 “Anlg2 InCtrl” (1) Selects Analog Input 2 control for the frequency reference
16 “MOP Up” Increases the value of A142
17 “MOP Down” Decreases the value of A142
18 “Acc & Dec 2” (1) • When active, A147 [Accel Time 2] and A148 [Decel Time 2] are used for all ramp rates.
19 “Current Lmt2” When active, A180
20 “Force DC” If the drive is not running, applying this input causes the drive to apply a DC Holding current (use A177
21 “Mtr I-Lock 1” Can be used as a protective motor interlock in Auxiliary Motor Control mode. When programmed but not active, input will
22 “Mtr I-Lock 2”
23 “Mtr I-Lock 3”
24 “Mtr I-Lock 4”
25 “Cmd Reverse” When prog rammed and ac tive the dri ve will run in the reverse direction when started from the integral keypad.
31 “Logic In 1” Input 1 used by digital output settings.
32 “Logic In 2” Input 2 used by digital output settings.
36 “Damper Input” • When active, drive is allowed to run normally.
(1) This function may be tied to one input only.
determined by P038 [Speed Reference].
for A142 is 60 Hz.
for A142 is 60 Hz.
• Can only be tied to one input.
Refer to the flowchart on page 38
ignoring A176 [DC Brake Time] while the input is applied.
prevent corresponding motor from operating. Refer to Appendix C for details.
• When inactive, drive is forced into sleep mode and is prevented from accelerating to commanded speed.
[Internal Freq] at the current Accel rate if P038 [Speed Reference] is set to 1 “InternalFreq”. Default
[Internal Freq] at the current Decel rate if P038 [Speed Reference] is set to 1 “InternalFreq”. Default
for more information on Accel/Decel selection.
[Current Limit 2] determines the drive current limit level.
[Start Source] and speed reference
[DC Brake Level],
66 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 69

Programming and Parameters Chapter 3
IMPORTANT
Value for T056 [Relay Out1 Level] must be entered in percent of drive rated output current.
32
T055 Setting T056 Min/Max
6 0/320 Hz
7 0/180%
8 0/815 Volts
9 0/100%
10 1/180 degs
12 0/1
T055 [Relay Out1 Sel] Related Parameter(s): P033
, T056, T058, T059, T069, T072, T073, T076, A163, d318
Sets the condition that changes the state of the output relay contacts.
Options 0 “Ready/Fault” (Default) Relay changes state when power is applied. This indicates that the drive is ready for operation. Relay returns drive to shelf state
when power is removed or a fault occurs.
1 “At Frequency” Drive reaches commanded frequency
2 “MotorRunning” Motor is receiving power from the drive.
3 “Hand Active” Active when drive is in local control.
4 “Motor Overld” Motor overload condition exists.
5 “Ramp Reg” Ramp regulator is modifying the programmed accel/decel times to avoid an overcurrent or overvoltage fault from occurring.
6 “Above Freq” • Drive exceeds the frequency (Hz) value set in T056
[Relay Out1 Level].
• Use T056 to set threshold.
7 “Above Cur” • Drive exceeds the current (% Amps) value set in T056
[Relay Out1 Level].
• Use T056 to set threshold.
8 “Above DCVolt” • Drive exceeds the DC bus voltage value set in T056
[Relay Out1 Level].
• • Use T056 to set threshold.
9 “Above Anlg 2” • Analog input voltage (I/O Terminal 17) exceeds the value set in T056
[Relay Out1 Level].
• Do not use if T073 [Analog In 2 Sel] is set to 3 “Voltage Mode - Bipolar”.
• This parameter setting can also be used to indicate a PTC trip point when the input (I/O Terminal 17) is wired to a PTC and
external resistor.
• Use T056 to set threshold.
10 “Above PF Ang” • Power Factor angle has exceeded the value set in T056 [Relay Out1 Level].
• Use T056 to set threshold.
11 “Anlg In Loss” Analog input loss has occurred. Program T072
[Analog In 1 Loss] and/or T076 [Analog In 2 Loss] for desired action when input
loss occurs.
12 “ParamControl” Enables the output to be controlled over network communications by writing to T056
[Relay Out1 Level]. (0 = Off, 1 = On.)
13 “Retries Exst” Value set in A163 [Auto Rstrt Tries] is exceeded.
14 “NonRec Fault” • Number of retries for A163
[Auto Rstrt Tries] is exceeded, or
• Non-resettable fault occurs, or
• A163 [Auto Rstrt Tries] is not enabled.
15 “Reverse” Drive is commanded to run in reverse direction.
16 “Logic In 1” An input is programmed as “Logic In 1” and is active.
17 “Logic In 2” An input is programmed as “Logic In 2” and is active.
23 “Aux Motor” Auxiliary Mo tor is commanded to run. Refer to Appendix C
for details.
24 “Fault” (with FRN 7.xx and later) Relay remains in the off state when power is applied to the drive and energizes when a fault occurs. This is inverted from Option
0, “Ready/Fault”.
T056 [Relay Out1 Level] Related Parameter(s): T055, T058, T059, d318
32 bit parameter.
Sets the trip point for the digital output relay if the value of T055 [Relay Out1 Sel] is 6, 7, 8, 9, 10 or 12.
Values Default: 0.0
Min/Max: 0.0/9999
Display: 0.1
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 67
Page 70

Chapter 3 Programming and Parameters
IMPORTANT
Do not use this parameter with Auxiliary Motor Control mode AutoSwap enabled.
IMPORTANT
Value for T061 [Relay Out2 Level] must be entered in percent of drive rated output current.
T058 [Relay 1 On Time] Related Parameter(s): T055
Sets delay time before Relay energizes after required condition testing.
Values Default: 0.0 Secs
Min/Max: 0.0/600.0 Secs
Display: 0.1 Secs
T059 [Relay 1 Off Time] Related Parameter(s): T055, T058, T058
Sets delay time before Relay de-energizes after required condition testing ceases.
Values Default: 0.0 Secs
Min/Max: 0.0/600.0 Secs
Display: 0.1 Secs
T060 [Relay Out2 Sel] Related Parameter(s): P033, T061, T063, T064, T076, A163, d318
Sets the condition that changes the state of the output relay contacts.
Options 0 “Ready/Fault” (Default) Relay changes state when power is applied. This indicates that the drive is ready for operation. Relay returns drive to shelf state
1 “At Frequency” Drive reaches commanded frequency.
2 “MotorRunning” (Default) Motor is receiving power from the drive.
3 “Hand Active” Active when drive is in local control.
4 “Motor Overld” Motor overload condition exists.
5 “Ramp Reg” Ramp regulator is modifying the programmed accel/decel times to avoid an overcurrent or overvoltage fault from occurring.
6 “Above Freq” • Drive exceeds the frequency (Hz) value set in T061
7 “Above Cur” • Drive exceeds the current (% Amps) value set in T061 [Relay Out2 Level].
when power is removed or a fault occurs.
[Relay Out2 Level].
• Use T061 to set threshold.
• Use T061 to set threshold.
, T056, T059
8 “Above DCVolt” • Drive exceeds the DC bus voltage value set in T061
9 “Above Anlg 2” • Analog input voltage (I/O Terminal 17) exceeds the value set in T061
10 “Above PF Ang” • Power Factor angle has exceeded the value set in T061 [Relay Out2 Level].
11 “Anlg In Loss” Analog input loss has occurred. Program T072
12 “ParamControl” Enables the output to be controlled over network communications by writing to T061
13 “Retries Exst” Value set in A163
14 “NonRec Fault” • Number of retries for A163
15 “Reverse” Drive is commanded to run in reverse direction.
16 “Logic In 1” An input is programmed as “Logic In 1” and is active.
17 “Logic In 2” An input is programmed as “Logic In 2” and is active.
23 “Aux Motor” Auxiliary Mo tor is commanded to run. Refer to Appendix C for details.
24 “Fault” (with FRN 7.xx and later) Relay remains in the off state when power is applied to the drive and energizes when a fault occurs. This is inverted from Option
68 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
• Use T061 to set threshold.
• Do not use if T073 [Analog In 2 Sel] is set to 3 “Voltage Mode - Bipolar”.
• This parameter setting can also be used to indicate a PTC trip point when the input (I/O Terminal 17) is wired to a PTC and
external resistor.
• Use T061 to set threshold.
• Use T061 to set threshold.
loss occurs.
[Auto Rstrt Tries] is exceeded.
[Auto Rstrt Tries] is exceeded OR
• Non-resettable fault occurs OR
• A163 [Auto Rstrt Tries] is not enabled.
0, “Ready/Fault”.
[Relay Out2 Level].
[Analog In 1 Loss] and/or T076 [Analog In 2 Loss] for desired action when input
[Relay Out2 Level].
[Relay Out2 Level]. (0 = Off, 1 = On.)
Page 71

Programming and Parameters Chapter 3
32
T060 Setting T061 Min/Max
6 0/320 Hz
70/180%
80/815 Volts
90/100%
10 1/180 degs
12 0/1
IMPORTANT
Do not use this parameter with Auxiliary Motor Control mode AutoSwap enabled.
T061 [Relay Out2 Level] Related Parameter(s): T060
32 bit parameter.
Sets the trip point for the digital output relay if the value of T060 [Relay Out2 Sel] is 6, 7, 8, 9, 10 or 12
.
, T063, T064, d318
Values Default: 0.0
Min/Max: 0.0/9999
Display: 0.1
T063 [Relay 2 On Time] Related Parameter(s): T060, T061, T064
Sets delay time before Relay energizes after required condition testing.
Values Default: 0.0 Secs
Min/Max: 0.0/600.0 Secs
Display: 0.1 Secs
T064 [Relay 2 Off Time] Related Parameter(s): T060, T061, T063
Sets delay time before Relay de-energizes after required condition testing ceases.
Values Default: 0.0 Secs
Min/Max: 0.0/600.0 Secs
Display: 0.1 Secs
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 69
Page 72

Chapter 3 Programming and Parameters
IMPORTANT
Value for T066 [Opto Out Level] must be entered in percent of drive rated output current.
32
T065 Setting T066 Min/Max
6 0/320 Hz
70/180%
80/815 Volts
90/100%
10 1/180 degs
12 0/1
T065 [Opto Out Sel] Related Parameter(s): P033
, T066, T068, T072, T076, A163, d318
Determines the operation of the programmable opto output.
Options 0 “Ready/Fault” Opto output is active when power is applied. This indicates that the drive is ready for operation. Opto output is inactive when
power is removed or a fault occurs.
1 “At Frequency” (Default) Drive reaches commanded frequency
2 “MotorRunning” Motor is receiving power from the drive.
3 “Hand Active” Active when drive is in local control.
4 “Motor Overld” Motor overload condition exists.
5 “Ramp Reg” Ramp regulator is modifying the programmed accel/decel times to avoid an overcurrent or overvoltage fault from occurring.
6 “Above Freq” • Drive exceeds the frequency (Hz) value set in T066
[Opto Out Le vel].
• Use T066 to set threshold.
7 “Above Cur” • Drive exceeds the current (% Amps) value set in T066
[Opto Out Le vel].
• Use T066 to set threshold.
8 “Above DCVolt” • Drive exceeds the DC bus voltage value set in T066
[Opto Out Level].
• • Use T066 to set threshold.
9 “Above Anlg 2” • Analog input voltage (I/O Terminal 17) exceeds the value set in T066
[Opto O ut Level].
• Do not use if T073 [Analog In 2 Sel] is set to 3 “Voltage Mode - Bipolar”.
• This parameter setting can also be used to indicate a PTC trip point when the input (I/O Terminal 17) is wired to a PTC and
external resistor.
• Use T066 to set threshold.
10 “Above PF Ang” • Power Factor angle has exceeded the value set in T066 [Opto Out Le vel].
• Use T066 to set threshold.
11 “Anlg In Loss” Analog input loss has occurred. Program T072
[Analog In 1 Loss] and/or T076 [Analog In 2 Loss] for desired action when input
loss occurs.
12 “ParamControl” Enables the output to be controlled over network communications by writing to T066
[Opto Out Level]. (0 = Off, 1 = On.)
13 “Retries Exst” Value set in A163 [Auto Rstrt Tries] is exceeded.
14 “NonRec Fault” • Number of retries for A163
[Auto Rstrt Tries] is exceeded, or
• Non-resettable fault occurs, or
• A163 [Auto Rstrt Tries] is not enabled.
15 “Reverse” Drive is commanded to run in reverse direction.
16 “Logic In 1” An input is programmed as “Logic In 1” and is active.
17 “Logic In 2” An input is programmed as “Logic In 2” and is active.
24 “Fault” (with FRN 7.xx and later) Relay remains in the off state when power is applied to the drive and energizes when a fault occurs. This is inverted from Option
0, “Ready/Fault”.
T066 [Opto Out Level] Related Parameter(s): T065, T068, A163, d318
32 bit parameter.
Determines the on/off point for the opto output when T065 [Opto Out Sel] is set to option 6, 7, 8, 9, 10,or 12.
.
Values Default: 0.0
Min/Max: 0.0/9999
Display: 0.1
70 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 73

Programming and Parameters Chapter 3
T058 Option Opto Out Logic
0 NO (Normally Open)
1 NC (Normally Closed)
T069 Option Setting Input Range DIP Switch AI1 Setting
0 Current Mode 0-20 mA 20 mA
1 Current Mode 4-20 mA 20 mA
2 Voltage Mode - Unipolar 0-10V 10V
4 Current Mode (Square Root) 0-20 mA 20 mA
5 Current Mode (Square Root) 4-20 mA 20 mA
6 Voltage Mode - Unipolar (Square Root) 0- 10V 10V
IMPORTANT
If analog inversion is implemented the drive will go to maximum frequency in the event the analog input is lost. It is strongly recommended to ac tivate
T072 [Analog In 1 Loss] to protect from this potential occurrence.
0
P035 [Maximum Freq]
P034 [Minimum Freq]
T070 [Analog In 1 Lo] T071 [Analog In 1 Hi]
0
Speed Reference
T068 [Opto Out Logic] Related Parameter(s): T065
Determines the logic (Normally Open/NO or Normally Closed/NC) of the opto output.
.
, T066
Note: Setting output to NC may cause output to “glitch” on power-up. The off/reset state of all outputs is open.
Values Default: 0
Min/Max: 0/1
Display: 1
T069 [Analog In 1 Sel] Related Parameter(s): T055, T070, T071, T072
Sets the analog input signal mode (0-20mA, 4-20mA, or 0-10V). This parameter must match DIP Switch AI1 setting on the control board.
.
Values Default: 2
Min/Max: 0/6
Display: 1
T070 [Analog In 1 Lo] Related Parameter(s): P034, P038, T069, T071, T072, A152, A153
Stop drive before changing this parameter.
Sets the analog input level that corresponds to P034 [Minimum Freq].
Analog inversion can be accomplished by setting this value larger than T071
[Analog In 1 Hi].
Values Default: 0.0%
Min/Max: 0.0/100.0%
Display: 0.1%
T071 [Analog In 1 Hi] Related Parameter(s): P035, P038, T069, T070, T072, A152, A153
Stop drive before changing this parameter.
Sets the analog input level that corresponds to P035 [Maximum Freq].
Analog inversion can be accomplished by setting this value smaller than T070
[Analog In 1 Lo].
Values Default: 100.0%
Min/Max: 0.0/100.0%
Display: 0.1%
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 71
Page 74

Chapter 3 Programming and Parameters
T073 Option Setting Input Range DIP Switch AI1 Setting
0 Current Mode 0-20 mA 20 mA
1 Current Mode 4-20 mA 20 mA
2 Voltage Mode - Unipolar 0-10V 10V
3
(1)
(1) Setting 3 is only available on [Analog In 2 Sel]. Input 2 is isolated and suppor ts a bi-polar input, so that setting 3
determines if the voltage input is enabled for bipolar control. If bipolar is selected, P034 [Minimum Freq] and
T074 [Analog In 2 Lo] are ignored. If input 2 is set up for current control, Bipolar mode is not possible. If the
analog input is inverted ([Analog In 2 Lo] > [Analog In 2 Hi]), Bipolar mode is disabled and this input uses
unipolar control only (negative values are treated like zero).
Voltage Mode - Bipolar -10 to +10V 10V
4 Current Mode (Square Root) 0-20 mA 20 mA
5 Current Mode (Square Root) 4-20 mA 20 mA
6 Voltage Mode - Unipolar (Square Root) 0- 10V 10V
7 Voltage Mode - Bipolar (Square Root) -10 to +10V 10V
IMPORTANT
If analog inversion is implemented the drive will go to maximum frequency in the event the analog input is lost. It is strongly recommended to ac tivate
T072 [Analog In 1 Loss] to protect from this potential occurrence.
0
P035 [Maximum Freq]
P034 [Minimum Freq]
T074 [Analog In 2 Lo] T075 [Analog In 2 Hi]
0
Speed Reference
T072 [Analog In 1 Loss] Related Parameter(s): T055
Stop drive before changing this parameter.
, T060, T065, T069, T070, T071, A152
Selects drive action when an input signal loss is detected. Signal loss is defined as an analog signal less than 1V or 2mA. The signal loss event ends and normal operation resumes
when the input signal level is greater than or equal to 1.5V or 3mA. If using a 0-10V analog input, set T070 [Analog In 1 Lo] to a minimum of 20% (i.e. 2 volts).
The drive will fault on an F29 Analog Input Loss
when the analog signal is lost if this parameter is used for the PID feedback, and this parameter and A152 [PID Ref Sel] are both set
to an option other than 0 “Disabled”.
Options 0 “Disabled” (Default)
1 “Fault (F29)” F29 Analog Input Loss
2 “Stop” Uses P037 [Stop Mode]
3 “Zero Ref” Drive runs at zero speed ref erence.
4 “Min Freq Ref” Drive runs at minimum frequency.
5 “Max Freq Ref” Drive runs at maximum frequency.
6 “Preset Freq0” Drive runs at A143 [Preset Freq 0].
7 “Hold Last” (with FRN 6.xx and
later)
Drive uses last f requency c ommand from analog in put prior to signal lo ss, or last P ID reference prior to si gnal loss w hen used as a
PID reference.
T073 [Analog In 2 Sel] Related Parameter(s): P038, T055, T065, T074, T075, T076, A152
Sets the analog input signal mode (0-20mA, 4-20mA, 0-10V, -10 to +10V). This parameter must match DIP Switch AI2 setting on the control board.
.
Values Default: 2
Min/Max: 0/7
Display: 1
T074 [Analog In 2 Lo] Related Parameter(s): P034, P038, T072, T073, T075, T076, A152, A153
Stop drive before changing this parameter.
Sets the analog input level that corresponds to P034 [Minimum Freq].
Analog inversion can be accomplished by setting this value larger than T075 [Analog In 2 Hi].
Values Default: 0.0%
Min/Max: 0.0/100.0%
Display: 0.1%
72 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 75

Programming and Parameters Chapter 3
ATT EN TI ON : Enabling the Sleep-Wake function can cause unexpected machine operation during the Wake mode. Equipment damage and/or personal
injury can result if this parameter is used in an inappropriate application. In addition, all applicable local, national & international codes, standards,
regulations or industry guidelines must be considered.
T075 [Analog In 2 Hi] Related Parameter(s): P035
Stop drive before changing this parameter.
, P038, T073, T074, T076, A152, A153
Sets the analog input level that corresponds to P035 [Maximum Freq].
Analog inversion can be accomplished by setting this value smaller than T074
[Analog In 2 Lo].
Values Default: 100.0%
Min/Max: 0.0/100.0%
Display: 0.1%
T076 [Analog In 2 Loss] Related Parameter(s): T055, T060, T065, T073, T074, T075
Stop drive before changing this parameter.
Selects drive action when an input signal loss is detected. Signal loss is defined as an analog signal less than 1V or 2mA. The signal loss event ends and normal operation resumes
when the input signal level is greater than or equal to 1.5V or 3mA. If using a 0-10V analog input, set T074 [Analog In 2 Lo] to a minimum of 20% (i.e. 2 volts).
The drive will fault on an F29 Analog Input Loss
when the analog signal is lost if this parameter is used for the PID feedback, and this parameter and A152 [PID Ref Sel] are both set
to an option other than 0 “Disabled”
Options 0 “Disabled” (Default)
1 “Fault (F29)” F29 Analog Input Loss
2 “Stop” Uses P037 [Stop Mode]
3 “Zero Ref” Drive runs at zero speed ref erence.
4 “Min Freq Ref” Drive runs at minimum frequency.
5 “Max Freq Ref” Drive runs at maximum frequency.
6 “Preset Freq0” Drive runs at A143 [Preset Freq 0].
7 “Hold Last” (with FRN 6.xx and
later)
Drive uses last f requency c ommand from analog in put prior to signal lo ss, or last P ID reference prior to si gnal loss w hen used as a
PID reference.
T077 [Sleep -Wake Sel] Related Parameter(s): T078, T079, T080, T081, T090, T091
The drive “sleeps” if the appropriate analog input drops below the set [Sleep Level] for the time set in [Sleep Time] and the drive is running. When entering sleep mode the drive will
ramp to zero and the run indicator ( ) on the keypad display will flash indicating the drive is in “sleep” mode. When the appropriate analog input rises above the set
[Wake Level] the drive will “wake” and ramp to the commanded frequency.
Inversion can be accomplished by setting T078 [Sleep Level] to a higher setting than T080 [Wake Level].
Options 0 “Disabled” (Default)
1 “Analog In 1” Sleep and Wake enabled from Analog Input 1.
2 “Analog In 2” Sleep and Wake enabled from Analog Input 2.
3 “Command Freq” Sleep and Wake enabled based on drive commanded frequency.
4 “Ind Slp Wake” (with FRN 7.xx
Sleep and Wake enabled independently using parameters T090 [Sleep Sel] and T091 [Wake Sel].
and later)
T078 [Sleep Level] Related Parameter(s): T077, T079, T080, T081
Sets the analog input level the drive must reach to enter sleep mode.
Values Default: 10.0%
Min/Max: 0.0/100.0%
Display: 0.1%
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 73
Page 76

Chapter 3 Programming and Parameters
T079 [Sleep Time] Related Parameter(s): T077
Sets the analog input time the drive must stay below to enter sleep mode.
Values Default: 0.0 Secs
Min/Max: 0.0/600.0 Secs
Display: 0.1 Secs
T080 [Wake Level] Related Parameter(s): T077, T078, T079, T081
Sets the analog input level the drive must reach to wake from sleep mode.
Values Default: 15.0%
Min/Max: 0.0/100.0%
Display: 0.1%
T081 [Wake Time] Related Parameter(s): T077, T078, T079, T080
Sets the analog input time the drive must stay above to wake from sleep mode.
Values Default: 0.0 Secs
Min/Max: 0.0/600.0 Secs
Display: 0.1 Secs
, T078, T080, T081
74 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 77

Programming and Parameters Chapter 3
Setting Output Range Minimum Output Value Maximum Output Value =
[Analog Output High]
Filter
(1)
(1) For settings with the filter enabled, if a 0-100% step change occurs, the output will reach 95% in 500 milliseconds, 99% in 810 milliseconds and 100% in 910 milliseconds.
DIP Switch
AO1 Setting
Related
Parameter
0 OutFreq 0-10 0-10V 0V = 0 Hz [Maximum Freq] None 10V b001
1 OutCurr 0-10 0-10V 0V = 0 Amps 200% Drive Rated FLA Filter A 10V b003
2 OutTorq 0-10 0-10V 0V = 0 Amps 200% Drive Rated FLA Filter A 10V b013
3 OutVolt 0-10 0-10V 0V = 0 Volts 120% Drive Rated Output V None 10V b004
4 OutPowr 0-10 0-10V 0V = 0 kW 200% Drive Rated Power Filter A 10V b010
5 Setpnt 0-10 0-10V 0V = 0.0% 100.0% Setting None 10V T084
6 TstData 0-10 0-10V 0V = 0000 65535 (Hex FFFF) None 10V A196
7 OutFreq 0-20 0-20 mA 0 mA = 0 Hz [Maximum Freq] None 20 mA b001
8 OutCurr 0-20 0-20 mA 0 mA = 0 Amps 200% Drive Rated FLA Filter A 20 mA b003
9 OutTorq 0-20 0-20 mA 0 mA = 0 Amps 200% Drive Rated FLA Filter A 20 mA b013
10 OutVolt 0-20 0-20 mA 0 mA = 0 Volts 120% Drive Rated Output V None 20 mA b004
11 OutPowr 0-20 0-20 mA 0 mA = 0 kW 200% Drive Rated Power Filter A 20 mA b010
12 Setpnt 0-20 0-20 mA 0 mA = 0.0% 100.0% Setting None 20 mA T084
13 TstData 0-20 0-20 mA 0 mA = 0000 65535 (Hex FFFF) None 20 mA A196
14 OutFreq 4-20 4-20 mA 4 mA = 0 Hz [Maximum Freq] None 20 mA b001
15 OutCurr 4-20 4-20 mA 4 mA = 0 Amps 200% Drive Rated FLA Filter A 20 mA b003
16 OutTorq 4-20 4-20 mA 4 mA = 0 Amps 200% Drive Rated FLA Filter A 20 mA b013
17 OutVolt 4-20 4-20 mA 4 mA = 0 Volts 120% Drive Rated Output V None 20 mA b004
18 OutPowr 4-20 4-20 mA 4 mA = 0 kW 200% Drive Rated Power Filter A 20 mA b010
19 Setpnt 4-20 4-20 mA 4 mA = 0.0% 100.0% Setting None 20 mA T084
20 TstData 4-20 4-20 mA 4 mA = 0000 65535 (Hex FFFF) None 20 mA A196
21 MinFreq 0-10 0-10V 0V = Min. Freq [Maximum Freq] None 10V b001
22 MinFreq 0-20 0-20 mA 0 mA = Min. Freq [Maximum Freq] None 20 mA b001
23 MinFreq 4-20 4-20 mA 4 mA = Min. Freq [Maximum Freq] None 20 mA b001
24 AnlgIn1 0-10 0-10V 0V = 0.0% 100.0% Setting Filter A 10V d305
25 AnlgIn1 0-20 0-20 mA 0 mA = 0.0% 100.0% Setting Filter A 20 mA d305
26 AnlgIn1 4-20 4-20 mA 4 mA = 0.0% 100.0% Setting Filter A 20 mA d305
27 AnlgIn2 0-10 0-10V 0V = 0.0% 100.0% Setting Filter A 10V d306
28 AnlgIn2 0-20 0-20 mA 0 mA = 0.0% 100.0% Setting Filter A 20 mA d306
29 AnlgIn2 4-20 4-20 mA 4 mA = 0.0% 100.0% Setting Filter A 20 mA d306
T083 Setting T082 Setting T082 Max. Output Value
50% 1 “OutCurr 0-10” 5V for 200% Drive Rated Output Current
90% 11 “OutPowr 0-20” 18mA for 200% Drive Rated Power
T082 [Analog Out1 Sel] Related Parameter(s): P035
Sets the analog output signal mode (0-20 mA, 4-20 mA, or 0-10V). The output is used to provide a signal that is proportional to several drive conditions. This parameter must match
DIP Switch AO1 setting.
Values Default: 0
Min/Max: 0/29
Display: 1
T083 [Analog Out1 High] Related Parameter(s): P035, T082, T084
Scales the Maximum Output Value for the T082 [Analog Out1 Sel] source setting.
Examples:
.
Values Default: 100%
Min/Max: 0/800%
Display: 1%
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 75
, T083, T084
Page 78

Chapter 3 Programming and Parameters
Setting Output Range Minimum Output Value Maximum Output Value =
[Analog Output High]
Filter
(1)
(1) For settings with the filter enabled, if a 0-100% step change occurs, the output will reach 95% in 500 milliseconds, 99% in 810 milliseconds and 100% in 910 milliseconds.
DIP Switch
AO2 Setting
Related
Parameter
0 OutFreq 0-10 0-10V 0V = 0 Hz [Maximum Freq] None 10V b001
1 OutCurr 0-10 0-10V 0V = 0 Amps 200% Drive Rated FLA Filter A 10V b003
2 OutTorq 0-10 0-10V 0V = 0 Amps 200% Drive Rated FLA Filter A 10V b013
3 OutVolt 0-10 0-10V 0V = 0 Volts 120% Drive Rated Output V None 10V b004
4 OutPowr 0-10 0-10V 0V = 0 kW 200% Drive Rated Power Filter A 10V b010
5 Setpnt 0-10 0-10V 0V = 0.0% 100.0% Setting None 10V T084
6 TstData 0-10 0-10V 0V = 0000 65535 (Hex FFFF) None 10V A196
7 OutFreq 0-20 0-20 mA 0 mA = 0 Hz [Maximum Freq] None 20 mA b001
8 OutCurr 0-20 0-20 mA 0 mA = 0 Amps 200% Drive Rated FLA Filter A 20 mA b003
9 OutTorq 0-20 0-20 mA 0 mA = 0 Amps 200% Drive Rated FLA Filter A 20 mA b013
10 OutVolt 0-20 0-20 mA 0 mA = 0 Volts 120% Drive Rated Output V None 20 mA b004
11 OutPowr 0-20 0-20 mA 0 mA = 0 kW 200% Drive Rated Power Filter A 20 mA b010
12 Setpnt 0-20 0-20 mA 0 mA = 0.0% 100.0% Setting None 20 mA T084
13 TstData 0-20 0-20 mA 0 mA = 0000 65535 (Hex FFFF) None 20 mA A196
14 OutFreq 4-20 4-20 mA 4 mA = 0 Hz [Maximum Freq] None 20 mA b001
15 OutCurr 4-20 4-20 mA 4 mA = 0 Amps 200% Drive Rated FLA Filter A 20 mA b003
16 OutTorq 4-20 4-20 mA 4 mA = 0 Amps 200% Drive Rated FLA Filter A 20 mA b013
17 OutVolt 4-20 4-20 mA 4 mA = 0 Volts 120% Drive Rated Output V None 20 mA b004
18 OutPowr 4-20 4-20 mA 4 mA = 0 kW 200% Drive Rated Power Filter A 20 mA b010
19 Setpnt 4-20 4-20 mA 4 mA = 0.0% 100.0% Setting None 20 mA T084
20 TstData 4-20 4-20 mA 4 mA = 0000 65535 (Hex FFFF) None 20 mA A196
21 MinFreq 0-10 0-10V 0V = Min. Freq [Maximum Freq] None 10V b001
22 MinFreq 0-20 0-20 mA 0 mA = Min. Freq [Maximum Freq] None 20 mA b001
23 MinFreq 4-20 4-20 mA 4 mA = Min. Freq [Maximum Freq] None 20 mA b001
24 AnlgIn1 0-10 0-10V 0V = 0.0% 100.0% Setting Filter A 10V d305
25 AnlgIn1 0-20 0-20 mA 0 mA = 0.0% 100.0% Setting Filter A 20 mA d305
26 AnlgIn1 4-20 4-20 mA 4 mA = 0.0% 100.0% Setting Filter A 20 mA d305
27 AnlgIn2 0-10 0-10V 0V = 0.0% 100.0% Setting Filter A 10V d306
28 AnlgIn2 0-20 0-20 mA 0 mA = 0.0% 100.0% Setting Filter A 20 mA d306
29 AnlgIn2 4-20 4-20 mA 4 mA = 0.0% 100.0% Setting Filter A 20 mA d306
T084 [Anlg Out1 Setpt] Related Parameter(s): T082
Sets direct parameter control over the analog output. If enabled, this sets the percent value of analog output.
Values Default: 0.0%
Min/Max: 0.0/100.0%
Display: 0.1%
T085 [Analog Out2 Sel] Related Parameter(s): P035, T086, T087
Sets the analog output signal mode (0-20 mA, 4-20 mA, or 0-10V). The output is used to provide a signal that is proportional to several drive conditions. This parameter must match
DIP Switch AO2 setting.
Values Default: 1
Min/Max: 0/29
Display: 1
76 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
, T083
Page 79

Programming and Parameters Chapter 3
T086 Setting T085 Setting T085 Max. Output Value
50% 1 “OutCurr 0-10” 5V for 200% Drive Rated Output Current
90% 11 “OutPowr 0-20” 18mA for 200% Drive Rated Power
T086 [Analog Out2 High] Related Parameter(s): P035
, T085, T087
Scales the Maximum Output Value for the A065 [Analog Out Sel] source setting.
Examples:
.
Values Default: 100%
Min/Max: 0/800%
Display: 1%
T087 [Anlg Out2 Setpt] Related Parameter(s): T085, T086
Sets direct parameter control over the analog output. If enabled, this sets the percent value of analog output.
Values Default: 0.0%
Min/Max: 0.0/100.0%
Display: 0.1%
T088 [Anlg Loss Delay] Related Parameter(s): T069, T070...T076
Sets the length of time after power-up during which the drive will not detect an analog signal loss. The drive response to an analog signal loss is set in T072 or T076 [Analog In x
Loss].
Values Default: 0.0 Secs
Min/Max: 0.0/20.0 Secs
Display: 0.1 Secs
T089 [Analog In Filter]
Sets level of additional filtering of the analog input signals. A higher number increases filtering and decreases bandwidth. Each setting doubles the applied filtering (1 = 2x filter, 2
= 4x filter, etc.). No additional filtering is applied when set to “0”.
Values Default: 0
Min/Max: 0/14
Display: 1
T090 [Sleep Sel] Related Parameter(s): b001, b002, T077, T078, d305, d306
(with FRN 7.xx and later.)
Selects the operation of the sleep func tion.
Options 0 “AI1 > SlpLvl” (Default) Sleep enabled from Analog Input 1 (d305 [Analog In 1]) above sleep level.
1 “AI1 < SlpLvl” Sleep enabled from Analog Input 1 (d305 [Analog In 1]) below sleep level.
2 “AI2 > SlpLvl” Sleep enabled from Analog Input 2 (d306 [Analog In 2]) above sleep level.
3 “AI2 < SlpLvl” Sleep enabled from Analog Input 2 (d306 [Analog In 2]) below sleep level.
4 “OFrq>SlpLvl” Sleep enabled based on drive output frequency (b001 [Output Freq]) above sleep level.
5 “OFrq>SlpLvl” Sleep enabled based on drive output frequency (b001 [Output Freq]) below sleep level.
6 “CFrq>SlpLvl” Sleep enabled based on drive command frequency (b002 [Commanded Freq]) above sleep level.
7 “CFrq>SlpLvl” Sleep enabled based on drive command frequency (b002 [Commanded Freq]) below sleep level.
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 77
Page 80

Chapter 3 Programming and Parameters
T091 [Wake Sel] Related Parameter(s): T077
(with FRN 7.xx and later.)
Selects the operation of the wake function.
Options 0 “AI1 > WakLvl” (Default) Wake enabled from Analog Input 1 (d305 [Analog In 1]) above wake-up level.
1 “AI1 < WakLvl” Wake enabled from Analog Input 1 (d305 [Analog In 1]) below wake-up level.
2 “AI2 > WakLvl” Wake enabled from Analog Input 2 (d306 [Analog In 2]) above wake-up level.
3 “AI2 > WakLvl” Wake enabled from Analog Input 2 (d306 [Analog In 2]) below wake-up level.
4 “CFrq>WakLvl” Wake enabled based on drive command frequency (b002 [Commanded Freq]) above wake-up level.
5 “CFrq>WakLvl” Wake enabled based on drive command frequency (b002 [Commanded Freq]) below wake-up level.
6 “FB-SP>WakLvl” PID Feedback Display minus PID Setpoint Display above wake-up level. If (d328 [PID Fdbk Display] - d304 [PID Setpnt Displ]) >
T080 [Wake Level], then wake is enabled.
7 “SP-FB>WakLvl” PID Setpoint Display minus PID Feedback Display above wake-up level. If (d304 [PID Setpnt Displ] - d328 [PID Fdbk Display]) >
T080 [Wake Level], then wake is enabled.
PID Feedback
T080 [Wake Level]
PID Setpoint
T080 [Wake Level]
T091 [Wake Sel]
= 7 “SP-FB>WakLvl”
T091 [Wake Sel]
= 6 “FB-SP>WakLvl”
8 “AI1 > WakDev” Wake enabled from Analog Input 1 above PID Setpoint Display plus wake deviation.
If d305 [Analog In 1] > (d304 [PID Setpnt Displ] + A203 [Wake Deviation]), then wake is enabled.
9 “AI1 < WakDev” Wake enabled from Analog Input 1 below PID Setpoint Display minus wake deviation.
If d305 [Analog In 1] < (d304 [PID Setpnt Displ] - A203 [Wake Deviation]), then wake is enabled.
10 “AI2 > WakDev” Wake enabled from Analog Input 2 above PID Setpoint Display plus wake deviation.
If d306 [Analog In 2] > (d304 [PID Setpnt Displ] + A203 [Wake Deviation]), then wake is enabled.
11 “AI2 < WakDev” Wake enabled from Analog Input 2 below PID Setpoint Display minus wake deviation.
If d306 [Analog In 2] < (d304 [PID Setpnt Displ] - A203 [Wake Deviation]), then wake is enabled.
12 “CFrq>WakDev” Wake enabled based on drive command frequency above PID Setpoint Display plus wake deviation.
If b002 [Commanded Freq] > (d304 [PID Setpnt Displ] - A203 [Wake Deviation]), then wake is enabled.
13 “CFrq<WakDev” Wake enabled based on drive command frequency below PID Setpoint Display minus wake deviation.
If b002 [Commanded Freq] < (d304 [PID Setpnt Displ] - A203 [Wake Deviation]), then wake is enabled.
, T080, A203, d304, d305, d306, d328
78 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 81

Programming and Parameters Chapter 3
IMPORTANT
Power to drive must be cycled before any changes will affect drive operation.
IMPORTANT
Power to drive must be cycled before any changes will affect drive operation.
Communications Group
C101 [Language]
Selects the language displayed by the integral LCD display and remote communications option.
Options 1 “English” (Default)
2“Français”
3“Español”
4 “Italiano”
5“Deutsch”
6 “Reserved”
7“Português”
8 “Reserved”
9 “Reserved”
10 “Nederlands”
C102 [Comm Format] Related Parameter(s): d303...d306
Selects the protocol data bits (8 data bits only), parity (None, Even, Odd), and stop bits (1 or 2) used by the RS485 port on the drive.
Refer to Appendix D and Appendix E for details on using the drive communication features.
Options 0 “RTU 8-N-1” (Default)
1“RTU 8-E-1”
2 “RTU 8-O-1”
3 “RTU 8-N-2”
4“RTU 8-E-2”
5 “RTU 8-O-2”
6“MetaSys N2”
7 “P1 8-N-1” Floor Level Network (FLN)
8 “P1 8-E-1” Floor Level Network (FLN)
9 “P1 8-O-1” Floor Level Network (FLN)
C103 [Comm Data Rate] Related Parameter(s): d303
Sets the serial port rate for the RS485 (DSI) por t.
Options 0 “1200”
1 “2400”
2 “4800”
3 “9600” (Default)
4“19.2K”
5“38.4K”
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 79
Page 82

Chapter 3 Programming and Parameters
IMPORTANT
Power to drive must be cycled before any changes will affect drive operation.
ATT EN TI ON : Risk of equipment damage exists. If a controller is programmed to write parameter data to Non-Volatile Storage (NVS) frequently, the NVS will
quickly exceed its life cycle and cause the drive to malfunction. Do not create a program that frequently uses configurable outputs to write parameter data to
NVS unless C107 [Comm Write Mode] is set to option 1.
C104 [Comm Node Addr] Related Parameter(s): d303
Sets the drive node address for the RS485 (DSI) port if using a network connection.
Values Default: 100
Min/Max: 1/247
Display: 1
C105 [Comm Loss Action] Related Parameter(s): d303, P037, C106
Selects the drive’s response to a loss of the communication connection or excessive communication errors.
Options 0 “Fault” (Default) Drive will fault on an F81 Comm Loss and coast to stop.
1 “Coast Stop” Stops drive via coast to stop.
2 “Stop” Stops drive via P037
3 “Continu Last” Drive continues operating at communication commanded speed saved in RAM.
4 “Run Preset 0” Drive will run at preset speed.
5“Kypd Inc/Dec” Drive will run at keypad (digital pot) speed.
C106 [Comm Loss Time] Related Parameter(s): d303, C105
Sets the time that the drive will remain in communication loss before implementing the option selected in C105 [Comm Loss Action].
Values Default: 5.0 Secs
Min/Max: 0.1/60.0 Secs
Display: 0.1 Secs
[Stop Mode] setting.
C107 [Comm Write Mode]
Determines whether parameter changes made over communication port are saved and stored in Non-Volatile Storage (NVS) or RAM only. If they are stored in RAM, the values will be
lost at power-down.
Options 0“Save” (Default)
1“RAM Only”
80 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 83

Programming and Parameters Chapter 3
IMPORTANT
For all settings except options 3 and 6, the drive must receive a leading edge from the start input for the drive to start after a stop input, loss of power or
fault condition.
ATT EN TI ON : Hazard of injury exists due to unintended operation. When P036 [Start Source] is set to
option 3 or option 6, and the Run input is maintained, the Run inputs do not need to be toggled after a
Stop input or a fault clear for the drive to run again. The drive will stop only when the stop command is
maintained or the drive is faulted.
IMPORTANT
There is greater potential voltage on the output terminals when using this option.
ATT EN TI ON : Hazard of injury exists due to unintended operation. When P036 [Start Source] is set to
option 3 or option 6, and the Run input is maintained, the Run inputs do not need to be toggled after a
Stop input or a fault clear for the drive to run again. The drive will stop only when the stop command is
maintained or the drive is faulted.
C108 [Start Source 2] Related Parameter(s): P037
Stop drive before changing this parameter.
Sets the control scheme used to start the drive when in Comm Control and the communication network commands the drive to run from Local Control. This function is normally used
by Point 79 of a P1-FLN. Refer to Start and Speed Reference Control on page 37 for details about how other drive settings can override the setting of this parameter.
Options 0 “Keypad” Integral keypad controls drive operation.
1 “3-Wire” I/O Terminal Block controls drive operation.
2 “2-Wire” I/O Terminal Block controls drive operation.
3 “2-W Lvl Sens” (Default) I/O Terminal Block controls drive operation.
• I/O Terminal 01 = Stop: Coast to Stop
• I/O Terminal 02 = Not Used
• I/O Terminal 03 = Not Used
• I/O Terminal 01 = Stop: Per P037
• I/O Terminal 02 = Start
• I/O Terminal 03 = Direction
• I/O Terminal 01 = Stop: Coast to Stop
• I/O Terminal 02 = Run FWD
• I/O Terminal 03 = Run REV
• I/O Terminal 01 = Stop: Coast to Stop
• I/O Terminal 02 = Run FWD
• I/O Terminal 03 = Run REV
Drive will restart after a “Stop” command when:
• Stop is removed and Run FWD is held active
[Stop Mode]
, P042, A166, d301
4 “2-W Hi Speed” I/O Terminal Block controls drive operation.
5 “Comm Port” Remote communications controls drive operation.
6 “2-W Lvl/Enbl” I/O Terminal Block controls drive operation.
• I/O Terminal 01 = Stop: Coast to Stop
• I/O Terminal 02 = Run FWD
• I/O Terminal 03 = Run REV
Outputs are kept in a ready-to-run state. The drive will respond to a “Start” command within 10 ms.
• I/O Terminal 01 = Stop: Coast to Stop
• I/O Terminal 02 = Not Used
• I/O Terminal 03 = Not Used
• I/O Terminal 01 = Function Loss: Fault and Coast to Stop
• I/O Terminal 02 = Run FWD
• I/O Terminal 03 = SW Enable
Drive will restart after a “Stop” command when:
• Stop is removed and Run FWD is held active
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 81
Page 84

Chapter 3 Programming and Parameters
C109 [Speed Ref 2] Related Parameter(s): b001
Sets the source of the speed reference to the drive when in Comm Control and the communication network commands the drive to run from Local Control.
Refer to the flowchart on page 37 for more inf ormation on sp eed reference co ntrol priorit y.
Options 0 “Drive Keypad” Internal frequency command from the digital speed keys on the integral keypad.
1 “InternalFreq” Internal frequency command from A142
2 “Analog In 1” (Default) External frequency command from an analog source as determined by T069
board. Default Dip Switch setting is 10V.
3 “Analog In 2” External frequency command from an analog source as determined by T073 [Analog In 2 Sel] and DIP Switch AI2 on the control
board. Default Dip Switch setting is 10V.
4 “Preset Freq” External frequency command as defined by A143
“Preset Frequencies” and the digital inputs are active.
5 “Comm Port” External frequency command from the communications port. Refer to Appendix E and Appendix G for details. Parameter
C102 [Comm Format] is used to select a communications protocol.
, b002, P038, P040, P042, T051...T054, T070, T071, T073, T074, T075, C102, A141, A142, A143...A146, A152, d301
[Internal Freq]. Must be set when using MOP function.
[Analog In 1 Sel] and DIP Switch AI1 on the control
-A146 [Preset Freq x] when T051-T054 [Digital Inx Sel] are programmed as
82 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 85

Programming and Parameters Chapter 3
IMPORTANT
Once the desired command frequency is reached, the Enter key must be pressed to store this value to EEPROM memory. If the ESC key is used before the
Enter key, the frequency will return to the original value following the normal accel/decel curve.
Input State of Digital In 1
(I/O Terminal 05 when
T051 = 8)
Input State of Digital In 2
(I/O Terminal 06 when
T052 = 8)
Frequency Source Accel / Decel Parameter Used
(2)
0 0 A143 [Preset Freq 0] [Accel Time 1] / [Decel Time 1]
1 0 A144 [Preset Freq 1] [Accel Time 1] / [Decel Time 1]
0 1 A145 [Preset Freq 2] [Accel Time 2] / [Decel Time 2]
1 1 A146 [Preset Freq 3] [Accel Time 2] / [Decel Time 2]
Advanced Program Group
A141 [Purge Frequency] Related Parameter(s): P038, P039, P040, T051...T054
Provides a fixed frequency command value when T051...T054 [Digital Inx Sel] is set to 1 “Purge”. An active purge input will override speed command as shown in the flowchart on
page 37.
Values Default: 5.0 Hz
Min/Max: 0.0/320.0 Hz
Display: 0.1 Hz
A142 [Internal Freq] Related Parameter(s): P038, T051...T054
Provides the frequency command to the drive when P038 [Speed Reference] is set to 1 “Internal Freq”. When enabled, this parameter will change the frequency command in “real
time” using the digital speed keys when in program mode.
...T054 [Digital Inx Sel] is set to 16 “MOP Up” or 17 “MOP Down” this parameter acts as the MOP frequency reference if P038 [Speed Reference] is set to 1 “InternalFreq”.
If T051
Values Default: 60.00 Hz
Min/Max: 0.00/320.00 Hz
Display: 0.01 Hz
A143 [Preset Freq 0]
A144 [Preset Freq 1]
A145 [Preset Freq 2]
A146 [Preset Freq 3]
Provides a fixed frequency command value when T051
An active preset input will override speed command as shown in the flowchart on page page 37.
Values A143 Default:
A144 Default:
A145 Default:
A146 Default::
Min/Max: 0.0/320.0 Hz
Display: 0.01 Hz
(1) To activate A143 [Preset Freq 0] set P038 [Speed Reference] to option 4 “Preset Freq”
(2) When a Digital Input is set to “Accel 2 & Decel 2”, and the input is active, that input overrides the settings in this table.
(1)
...T052 [Digital Inx Sel] is set to 8 “Preset Freq”.
(1)
0.0 Hz
5.0 Hz
10.0 Hz
20.0 Hz
Related Parameter(s): P038, P039, P040, T051...T052, A147, A148
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 83
Page 86

Chapter 3 Programming and Parameters
Speed
0
Time
P035 [Maximum Freq]
P039 or A147
[Accel Time x]
P040 or A148
[Decel Time x]
0
Acceleration
Deceleration
Example:
Accel Time = 10 s
S-Curve Setting = 50%
S-Curve Time = 10 x 0.5 = 5 s
Total Time = 10 + 5 = 15 S
1/2 S Curve Time
2.5 Seconds
Total Time to Accelerate = Accel Time + S Curve Time
50% S Curve
Target
Target/2
Accel Time
10 Seconds
1/2 S Curve Time
2.5 Seconds
A147 [Accel Time 2] Related Parameter(s): P039
, T051...T054, A143...A146
When active, sets the rate of acceleration for all speed increases. Refer to the flowchart on page 38 for details.
Accel Rate = [Maximum Freq]/[Accel Time]
Values Default: 30.00 Secs
Min/Max: 0.00/600.00 Secs
Display: 0.01 Secs
A148 [Decel Time 2] Related Parameter(s): P040, T051...T054, A143...A146
When active, sets the rate of deceleration for all speed decreases. Refer to the flowchart on page 38 for details.
Maximum Freq/Decel Time = Decel Rate
Values Default: 30.00 Secs
Min/Max: 0.01/600.00 Secs
Display: 0.01 Secs
A149 [S Curve %]
Sets the percentage of acceleration or deceleration time that is applied to the ramp as S Curve. Time is added, 1/2 at the beginning and 1/2 at the end of the ramp.
Values Default: 20%
A150 [PID Trim Hi]
Sets the maximum positive value that is added to a PID reference when PID trim is used.
Values Default: 60.0 Hz
84 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
100% S Curve
Target
S-Curve Time = Accel Time
Total Time to Accelerate = Accel Time + S Curve Time
Min/Max: 0/100% (A setting of 0% disables this parameter.)
Display: 1%
Min/Max: 0.0/320.0 Hz
Display: 0.1 Hz
Page 87

Programming and Parameters Chapter 3
A151 [PID Trim Lo]
Sets the minimum positive value that is added to a PID reference when PID trim is used.
Values Default: 0.0 Hz
Min/Max: 0.0/320.0 Hz
Display: 0.1 Hz
A152 [PID Ref Sel] Related Parameter(s): P038, T070, T071, T072, T074, T075
Stop drive before changing this parameter.
Enables/disables PID mode and selects the source of the PID reference. Refer to Appendix D for details.
Note: PID analog reference is scaled through the [Analog In x Hi/Lo] parameters. The invert operation is obtained through programming these two parameters. If A152 [PID Ref Sel]
is not set to zero, PID can be disabled by programming a digital input.
Options 0 “PID Disabled” (Default)
1 “PID Setpoint
2 “Analog In 1”
3 “Analog In 2”
4 “Comm Port”
5 “Setpnt, Trim” Use PID output as Trim on [Frequency Select]
6 “A-In 1, Trim” Use PID output as Trim on [Frequency Select]
7 “A-In 2, Trim”
(1)
Use PID output as Trim on [Frequency Select]
8 “Comm, Trim” Use PID output as Trim on [Frequency Select]
(1) The PID will not function with bipolar input. It will ignore any negative voltages and treat them like zero.
A153 [PID Feedback Sel] Related Parameter(s): T070, T071, T072, T074, T075, A204, A205
Select the source of the PID feedback. Refer to Appendix D for details.
Note: PID analog reference is scaled through the [Analog In x Hi/Lo] parameters. The invert operation is obtained through programming these two parameters.
Options 0 “Analog In 1” (Default)
1“Analog In 2”
2 “Comm Port”
3 “ACT1 - ACT2”
(1)
ACT1 m inus ACT2
(with FRN 7.xx and later)
4 “ACT1 + ACT2”
ACT1 p lus ACT2
(with FRN 7.xx and later)
5 “ACT1 * ACT2”
ACT1 multiplied by ACT2
(with FRN 7.xx and later)
6 “ACT1 / ACT2”
ACT1 divided by ACT2
(with FRN 7.xx and later)
7“Min A1, A2”
The smaller of ACT1 or ACT2 is used as the feedback signal.
(with FRN 7.xx and later)
8 “Max A1, A2”
The larger of ACT1 or ACT2 is used as the feedback signal.
(with FRN 7.xx and later)
(1) The PID will not function with bipolar input. It will ignore any negative voltages and treat them like zero.
A154 [PID Prop Gain]
Sets the value for the PID proportional component when the PID mode is enabled by A152
[PID Ref Sel].
Values Default: 1.00
Min/Max: 0.00/99.99
Display: 0.01
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 85
Page 88

Chapter 3 Programming and Parameters
A155 [PID Integ Time]
Sets the value for the PID integral component when the PID mode is enabled by A152 [PID Ref Sel].
Values Default: 2.0 Secs
Min/Max: 0.0/999.9 Secs
Display: 0.1 Secs
A156 [PID Diff Rate]
Sets the value for the PID differential component when the PID mode is enabled by A152 [PID Ref Sel].
Values Default: 0.00 (1/Secs)
Min/Max: 0.00/99.99 (1/Secs)
Display: 0.01 (1/Secs)
A157 [PID Setpoint]
Provides an internal fixed value for process setpoint when the PID mode is enabled by A152 [PID Ref Sel].
Values Default: 0.0%
Min/Max: 0.0/100.0%
Display: 0.1%
A158 [PID Deadband]
Sets the lower limit of the PID output.
Values Default: 0.0%
Min/Max: 0.0/10.0%
Display: 0.1%
A159 [PID Preload]
Sets the value used to preload the integral component on start or enable.
Values Default: 0.0 Hz
Min/Max: 0.0/320.0 Hz
Display: 0.1 Hz
A160 [Process Factor] Related Parameter(s): b008
Scales the output frequency value displayed by b008
Process Display = [Output Freq] x [Process Factor]
Values Default: 30.0
Min/Max: 0.1/999.9
Display: 0.1
[Process Display].
86 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 89

Programming and Parameters Chapter 3
ATT EN TI ON : Equipment damage and/or personal injury may result if this parameter is used in an inappropriate application. Do not use this fun ction
without considering applicable local, national and international codes, standards, regulations or industry guidelines.
ATT EN TI ON : Equipment damage and/or personal injury may result if this parameter is used in an inappropriate application. Do not use this fun ction
without considering applicable local, national and international codes, standards, regulations or industry guidelines.
IMPORTANT
When this parameter is enabled, verify that A200 [Motor NP FLA] is set to the motor’s ac tual full load amp value.
A163 [Auto Rstrt Tries] Related Parameter(s): T055
, T060, T065, T066, A164
Sets the maximum number of times the drive attempts to reset a fault and restart.
Clear a Type 1 fault and restart the drive.
1. Set A163 [Auto Rstrt Tries] to a value other than “0”.
2. Set A164 [Auto Rstrt Delay] to a value other than “0”.
Clear an OverVoltage, UnderVoltage or Heatsink OvrTmp fault without restarting the drive.
1. Set A163 [Auto Rstrt Tries] to a value other than “0”.
2. Set A164 [Auto Rstrt Delay] to “0”.
Note: If the parameter is not set to zero and [Auto Rstrt Time] is set to zero, auto fault clear is enabled. This feature automatically clears faults, but does not restart the drive.
Values Default: 0
Min/Max: 0/9
Display: 1
A164 [Auto Rstrt Delay] Related Parameter(s): A163
Sets the time between restart attempts when A163 [Auto Rstrt Tries] is set to a value other than zero.
Note: If the parameter is not set to zero and [Auto Rstrt Time] is set to zero, auto fault clear is enabled. This feature automatically clears faults, but does not restart the drive.
Values Default: 1.0 Secs
Min/Max: 0.0/160.0 Secs
Display: 0.1 Secs
A165 [Start At PowerUp] Related Parameter(s): P036
Stop drive before changing this parameter.
Enables/disables a feature that allows a Start or Run comma nd to automatically cause the drive to resume running at commanded speed after drive input power is restored. Requires
a digital input configured for Run or Star t and a valid start contact.
This parameter will not function if parameter P036
[Start Source] is set to 4 “2-W Hi Speed”.
Options 0 “Disabled” (Default)
1“Enabled”
A166 [Reverse Disable] Related Parameter(s): b006, P036, T051-T054
Stop drive before changing this parameter.
Enables/disables the function that allows the direction of motor rotation to be changed. The reverse command may come from a digital or a serial command. All reverse inputs
including two-wire Run Reverse will be ignored with reverse disabled.
Options 0“Rev Enabled”
1 “Rev Disabled” (Default
A167 [Flying Start En] Related Parameter(s): A200
Sets the condition that allows the drive to reconnect to a spinning motor at actual RPM.
Options 0 “Disabled” (Default)
1“Enabled”
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 87
Page 90

Chapter 3 Programming and Parameters
IMPORTANT
Ignoring derating guidelines can cause reduced drive performance.
% Output Curent (A)
68
84
88
80
76
96
100
92
72
64
60
56
52
50
48
Carrier Frequency (kHz)
8
7
6
54321 109
A168 [PWM Frequency] Related Parameter(s): A169
Sets the carrier frequency for the PWM output waveform. The chart below provides derating guidelines based on the PWM frequency setting.
Values Default: 4.0 kHz
Min/Max: 2.0/10.0 kHz (Frame C and D drives)
2.0/8.0 kHz (Frame E, F, G and H drives)
Display: 0.1 kHz
A169 [PWM Mode] Related Parameter(s): A168
Selects the PWM algorithm used.
Options 0 “Space Vector” 3-Phase Modulation: Provides quiet operation and produces less motor losses.
1 “2-Phase” (Default) 2-Phase Modulation: Provides less drive losses and best performance with long motor cable runs.
88 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 91

Programming and Parameters Chapter 3
% P032 [Motor NP Hertz]
% P031 [Motor NP Volts]
100
50
1/2 [Motor NP Volts]
1/2
[Motor NP Hertz]
4
3
2
1
0 50 100
Settings
5-14
A174 [Maximum Voltage] can be set anywhere.
Settings greater than P031 [Motor NP Volts] define a point on the V/Hz curve.
Settings less than P031 [Motor NP Volts] function as limits only and do not change the V/Hz curve.
P034 [Minimum Freq] can be set anywhere.
Functions as a limit only and does not change the V/Hz curve.
P035 [Maximum Freq] can be set anywhere.
Settings greater than P032 [Motor NP Hertz]
define a point on the V/Hz curve.
P035 [Maximum Freq] can be set anywhere.
Settings less than P032 [Motor NP Hertz] function
as limits only and do not change the V/Hz curve.
Setting Boost Voltage (% of Base)
5 0.0 (no IR Comp. added)
6 0.0
7 2.5
8 5.0
9 7.5
10 10.0
11 12.5
12 15.0
13 17.5
14 20.0
15 "Kepco" Curve
(1)
Setting Fan/Pump Curves
1 30.0
2 35.0
3 40.0
4 45.0
A170 [Boost Select] Related Parameter(s): b004
Sets the boost voltage (% of P031 [Motor NP Volts]) and redefines the Volts per Hz curve.
Drive may add additional voltage unless Option 5 is selected.
Frames C-F Frames G-H
Options 0 “Custom V/Hz” 0 “Custom V/Hz”
1 “30.0, VT” 1 “30.0, VT” Typical Fan/Pump Curves
2 “35.0, VT” 2 “35.0, VT”
3 “40.0, VT” 3 “40.0, VT”
4 “45.0, VT” (Default) 4 “45.0, VT” (Default)
5 “0.0 no IR” 5 “0.0 no IR”
6“0.0” 6“0.0” Boost Curves
7“2.5” 7“0.2”
8“5.0” 8“0.5”
9“7.5” 9“0.8”
10 “10.0” 10 “1.0”
11 “12.5” 11 “2.0”
12 “15.0” 12 “3.0”
13 “17.5” 13 “4.0”
14 “20.0” 14 “5.0”
(1) Kepco Curve is used in specific systems to meet requirements of the Korean Electric Power Company.
15 “Kepco” Curve
(1)
15 “Kepco” Curve
, P031, P032, A171, A172, A173
(1)
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 89
Page 92

Chapter 3 Programming and Parameters
Frequency
Voltage
A173 [Break Frequency] P032 [Motor NP Hertz]
P035 [Maximum Freq]
A171 [Start Boost]
P031 [Motor NP Volts]
A174 [Maximum Voltage]
A172 [Break Voltage]
A034 [Minimum Freq]
A171 [Start Boost] Related Parameter(s): P031
, P032, P034, P035, A170, A172, A173, A174
Sets the boost voltage (% of P031 [Motor NP Volts]) and redefines the Volts per Hz curve when A170 [Boost Select] = 0 “Custom V/Hz”.
Values Default: 2.5%
Min/Max: 0.0/25.0%
Display: 1.1%
A172 [Break Voltage] Related Parameter(s): P031, P032, P034, P035, A170, A171, A173, A174
Sets the break voltage applied at the break frequency when A170 [Boost Select] = 0 “Custom V/Hz”.
Values Default: 25%
Min/Max: 0.0/100.0%
Display: 0.1%
A173 [Break Frequency] Related Parameter(s): P031, P032, P034, P035, A170, A171, A172, A174
Sets the frequency where break frequency is applied when A170 [Boost Select] = 0 “Custom V/Hz”.
Values Default: 15.0 Hz
Min/Max: 0.0/320.0 Hz
Display: 0.1 Hz
A174 [Maximum Voltage] Related Parameter(s): b004, A171, A172, A173
Sets the highest voltage the drive will output.
Values Default: Drive Rated Volts
Min/Max: 20/Drive Rated Volts
Display: 1 VAC
A175 [Slip Hertz @ FLA]] Related Parameter(s): P033
Compensates for the inherent slip in an induction motor. This frequency is added to the commanded
output frequency based on motor current.
Values Default: 2.0 Hz
Min/Max: 0.0/10.0 Hz
Display: 0.1 Hz
90 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 93

Programming and Parameters Chapter 3
e
p
e
d
d
[
]
[
]
p
e
e
d
[
]
[
]
Voltage
Speed
ATT EN TI ON : If a hazard of injury due to movement of equipment or material exists, an auxiliary mechanical braking device must be used.
ATT EN TI ON : This feature should not be used with synchronous or permanent magnet motors. Motors may be demagnetized during braking.
Volts/Speed
Time
Start Command
[DC Brake Level]
[DC Brk Time@Strt]
Voltage
Speed
A176 [DC Brake Time] Related Parameter(s ): P037
Sets the length of time that DC brake current is “injected” into the motor when P037
[Stop Mode] i s set to either 4 “Ramp” or 6 “DC Brake”. Refer to param eter A177 [DC Brake Level].
, A177
Values Default: 0.0 Secs
Min/Max: 0.0/99.9 Secs (A setting of 99.9 = Continuous)
Display: 0.1 Secs
A177 [DC Brake Level] Related Parameter( s): P037, T051...T054, A176, A178
Defines the maximum DC brake current, in amps, applied to the motor.
eed
olts/S
Stop Comman
Ramp-to-Stop Mod
DC Brake Time
DC Brake Level
Tim
DC Injection Braking Mod
Voltage
eed
Spee
olts/S
Stop Comman
DC Brake Time
DC Brake Level
Tim
Values Default: Drive Rated Amps × 0.05
Min/Max: 0.0/(Drive Rated Amps × 1.5)
Display: 0.1 Amps
A178 [DC Brk Time@Strt] Related Parameter(s ): P037, A177
Sets the length of time that DC brake current is “injected” into the motor after a valid start command is received. Parameter A177 [DC Brake Level] controls the level of braking
current used.
Values Default: 0.0 Secs
Min/Max: 0.0/99.9 Secs (A setting of 99.9 = Continuous)
Display: 0.1 Secs
A179 [Current Limit 1] Related Parameter(s): P033
Maximum output current allowed before current limiting occurs.
Values Default: Drive Rated Amps × 1.1
Min/Max: 0.0/(Drive Rated Amps × 1.5)
Display: 0.1 Amps
A180 [Current Limit 2] Related Parameter(s): P033
Maximum output current allowed before current limiting occurs.
Values Default: Drive Rated Amps × 1.1
Min/Max: 0.0/(Drive Rated Amps × 1.5)
Display: 0.1 Amps
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 91
Page 94

Chapter 3 Programming and Parameters
e
0
80
00
60
0
0
e
0
80
00
60
0
0
[
]
e
0
80
00
60
0
0
0
00
5
50
5
5025
0
00
5
50
5
5025
0
00
5
50
5
5025
A181 [Motor OL Select] Related Parameter(s): P032
, P033, P043
Drive provides Class 10 motor overload protection. Settings 0-2 selec t the derating factor for the I2t overload function.
1
4
2
No Derat
1
4
2
17
2
1
1251007
Min Derat
1
Motor OL Curent
4
2
of P033
17
2
1
1251007
Max Derat
17
2
1
1251007
Options 0“No Derate” (Default)
1“Min Derate”
2 “Max Derate”
A182 [Drive OL Mode] Related Parameter(s): P032, P033
Determines how the drive handles overload conditions that would otherwise cause the drive to fault.
Options 0“DIsabled”
1“Reduce CLim”
2 “Reduce PWM”
3“Both-PWM 1st” (Default)
A183 [SW Current Trip] Related Parameter(s): P033
Enables/disables a software instantaneous (within 100 ms) current trip.
Values Default: 0.0 (Disabled)
Min/Max: 0.0/(Drive Rated Amps × 1.8)
Display: 0.1 Amps
A184 [Load Loss Level] Related Parameter(s): P033
Provides a software trip (Load Loss fault) when the current drops below this level for the time specified in [Load Loss Time].
Values Default: 0.0 (Disabled)
Min/Max: 0.0/Drive Rated Amps
Display: 0.1 Amps
A185 [Load Loss Time] Related Parameter(s): P033
Sets the required time for the current to be below [Load Loss Level] before a Loa d Loss fault occurs.
Values Default: 0 Secs (Disabled)
Min/Max: 0/9999 Secs
Display: 1 Secs
A186 [Stall Fault Time]
Sets the time that the drive will remain in stall mode before a fault is issued.
Options 0 “60 Seconds” (Default)
1 “120 Seconds”
2 “240 Seconds”
3 “360 Seconds”
4 “480 Seconds”
5“Flt Disabled
92 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 95

Programming and Parameters Chapter 3
Frequency
Time
Skip Frequency
Command
Frequency
Drive Output
Frequency
Skip Frequency Band
A187 [Bus Reg Mode]
Controls the operation of the drive voltage regulation, which is normally operational at decel or when the bus voltage rises.
Refer to the Attention statement on page 9
for important information on bus regulation.
Options 0“Disabled”
1 “Enabled” (Default)
A188 [Skip Frequency 1] Related Parameter(s): A189
Sets the frequency at which the drive will not operate.
A setting of 0 disables this parameter.
Values Default: 0 Hz
Min/Max: 0/320 Hz
Display: 1 Hz
A189 [Skip Freq Band 1] Related Parameter(s): A188
Determines the bandwidth around A188 [Skip Frequency 1]. A189 [Skip Freq Band 1] is split applying 1/2 above and 1/2 below the actual skip frequency.
A setting of 0.0 disables this parameter.
Values Default: 0 Hz
Min/Max: 0.0/30.0 Hz
Display: 0.1 Hz
A190 [Skip Frequency 2] Related Parameter(s): A191
Sets the frequency at which the drive will not operate.
A setting of 0 disables this parameter.
Values Default: 0 Hz
Min/Max: 0/320 Hz
Display: 1 Hz
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 93
Page 96

Chapter 3 Programming and Parameters
Frequency
Time
Skip Frequency
Command
Frequency
Drive Output
Frequency
Skip Frequency Band
Frequency
Time
Skip Frequency
Command
Frequency
Drive Output
Frequency
Skip Frequency Band
A191 [Skip Freq Band 2] Related Parameter(s): A190
Determines the bandwidth around A190 [Skip Frequency 2]. A191 [Skip Freq Band 2] is split applying 1/2 above and 1/2 below the actual skip frequency.
A setting of 0.0 disables this parameter.
Values Default: 0 Hz
Min/Max: 0.0/30.0 Hz
Display: 0.1 Hz
A192 [Skip Frequency 3] Related Parameter(s): A193
Sets the frequency at which the drive will not operate.
A setting of 0 disables this parameter.
Values Default: 0 Hz
Min/Max: 0/320 Hz
Display: 1 Hz
A193 [Skip Freq Band 3] Related Parameter(s): A192
Determines the bandwidth around A192 [Skip Frequency 3]. A193 [Skip Freq Band 3] is split applying 1/2 above and 1/2 below the actual skip frequency.
A setting of 0.0 disables this parameter.
Values Default: 0 Hz
Min/Max: 0.0/30.0 Hz
Display: 0.1 Hz
A194 [Compensation]
Enables/disables correction options that may improve problems with motor instability.
Options 0“Disabled”
1 “Electrical” (Default)
(1)
Some drive/motor combinations have inherent instabilities which are exhibited as non-sinusodial motor currents. This setting
attempts to correct this condition.
2 “Mechanical” Some motor/load combinations have mechanical resonances which can be excited by the drive current regulator. This
(1)
3“Both”
(1) Use “Dead Time Compensation” algorithm to minimize flat spots in motor current waveforms. Use this solution also to achieve motor stability.
setting slows down the current regulator response and attempts to correct this condition.
94 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 97

Programming and Parameters Chapter 3
A195 [Reset Meters] Related Parameter(s): d310
...d317
Resets the marker that indicates Fault Times and Energy usage.
Options 0 “Ready/Idle” (Default)
1 “Reset MWh” Also resets kWh marker.
2 “Reset Time” min, hr, and x10hr
A196 [Testpoint Sel] Related Parameter(s): d319
Used by Rockwell Automation field service personnel.
Values Default: 1024
Min/Max: 1024/65535
Display: 1
A197 [Fault Clear] Related Parameter(s): b007, d307, d308, d309
Stop drive before changing this parameter.
Resets a fault and clears the fault queue. Used primarily to clear a fault over network communications.
Options 0 “Ready/Idle” (Default)
1 “Reset Fault”
2 “Clear Buffer” Clears all fault buffers.
A198 [Program Lock]
Protects parameters against change by unauthorized personnel. Enter a user-selected password to lock the parameters via Option 1. Enter the same password to unlock the
parameters.
Options 0“Unlocked” (Default)
1 “Locked” Locks all parameters.
2 “Locked” Parameter edits allowed over communications network.
3“Locked” Locks P035
[Maximum Freq] and A170 [Boost Select].
A199 [Motor NP Poles] Related Parameter(s): d323
Sets the motor poles. This is used to calculate d323 [Output RPM].
Values Default: 4
Min/Max: 2/40
Display: 1
A200 [Motor NP FLA] Related Parameter(s): A167
Set to the motor nameplate rated full load amps.
Values Default: Drive Rated Amps
Min/Max: 0.1/(Drive Rated Amps × 2)
Display: 0.1 Amps
A201 [PID Invert Error]
(With FRN 6.xx and later.)
When set to “Inverted”, changes the sign of the PID error. This causes an increase in the drive output frequency with PID Feedback greater than PID Setpoint, and a decrease in drive
output frequency with PID Feedback less than PID Setpoint.
Options 0 “Not Inverted” (Default)
1 “Inverted” Locks all parameters.
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 95
Page 98

Chapter 3 Programming and Parameters
A207 [ACT1 Maximum]
ACT1 % Normal
A206 [ACT1 Minimum]
T070 [Analog In 1 Lo] T071 [Analog In 1 Hi]
A206 [ACT1 Minimum]
ACT1 % Inverted
A207 [ACT1 Maximum]
T070 [Analog In 1 Lo] T071 [Analog In 1 Hi]
A202 [MOP Reset Sel] Related Parameter(s): A142
(With FRN 6.xx and later.)
Set the drive to save the current MOP reference command.
Options 0 “Zero MOP Ref” This option clamps A142 [Internal Freq] at 0.0 Hz when the drive is not running.
1 “Save MOP Ref” (Default) Reference is saved in A142
[Internal Freq].
A203 [Wake Deviation] Related Parameter(s): T091
(with FRN 7.xx and later.)
Sets the deviation from PID setpoint the drive must reach to wake from sleep mode.
Values Default: 0.0%
Min/Max: 0.0/100.0%
Display: 0.1%
A204 [ACT1 Input] Related Parameter(s): A153
(with FRN 7.xx and later.)
Defines the source of the data used as the actual (ACT) 1 input.
Options 0 “Analog In 1” (Default) Use Analog Input 1
1 “Analog In 2” Use Analog Input 2
2“Current” Use b003
[Output Current]
A205 [ACT2 Input] Related Parameter(s): A153
(with FRN 7.xx and later.)
Defines the source of the data used as the actual (ACT) 2 input.
Options 0 “Analog In 1” (Default) Use Analog Input 1
1 “Analog In 2” Use Analog Input 2
2“Current” Use b003
[Output Current]
A206 [ACT1 Minimum] Related Parameter(s): A204
(with FRN 7.xx and later.)
Sets the minimum value of the actual (AC T) 1 input. Used wit h the analog input min/max settings to scale the analog input for use as the PID feedback. Can be used in a normal and
inverted mode.
Values Default: 0.0%
Min/Max: 0.0/200.0%
Display: 0.1%
A207 [ACT1 Maximum] Related Parameter(s): A204
(with FRN 7.xx and later.)
Sets the maximum value of the actual (ACT) 1 input.
Values Default: 100.0%
Min/Max: 0.0/200.0%
Display: 0.1%
96 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Page 99

Programming and Parameters Chapter 3
A209 [ACT2 Maximum]
ACT2 % Normal
A208 [ACT2 Minimum]
T074 [Analog In 2 Lo] T075 [Analog In 2 Hi]
A208 [ACT2 Minimum]
ACT2 % Inverted
A209 [ACT2 Maximum]
T074 [Analog In 2 Lo] T075 [Analog In 2 Hi]
A210 [Wake PID Preload]
A210 = 0.0 Hz (no preload)
PID Output
TimeWake
A157 [PID Setpoint]
A210 = 0.1 to 320.0 Hz
A208 [ACT2 Minimum] Related Parameter(s): A205
(with FRN 7.xx and later.)
Sets the minimum value of the actual (AC T) 2 input. Used wit h the analog input min/max settings to scale the analog input for use as the PID feedback. Can be used in a normal and
inverted mode.
Values Default: 0.0%
Min/Max: 0.0/200.0%
Display: 0.1%
A209 [ACT2 Maximum] Related Parameter(s): A205
(with FRN 7.xx and later.)
Sets the maximum value of the actual (ACT) 2 input.
Values Default: 100.0%
Min/Max: 0.0/200.0%
Display: 0.1%
A210 [Wake PID Preload] Related Parameter(s): T078
(with FRN 7.xx and later.)
Sets the value used to preload the PID integral component on wake. This value must be greater than T078 [Sleep Level] or drive will not wake up.
Values Default: 0.0 Hz (No preload)
Min/Max: 0.0/320.0 Hz
Display: 0.1 Hz
Rockwell Automation Publication 22C-UM001J-EN-E - January 2017 97
Page 100

Chapter 3 Programming and Parameters
IMPORTANT
Value for [Relay OutX Level] must be entered in percent of drive rated output current.
Aux Relay Card Group
R221 [Relay Out3 Sel] Related Parameters for the Aux Relay Card Group:
R224 [Relay Out4 Sel] Aux Parameters
R227 [Relay Out5 Sel] PID Parameters
R230 [Relay Out6 Sel] Digital Inputs
R233 [Relay Out7 Sel] Relays 1 and 2
R236 [Relay Out8 Sel]
Note: Auxiliary Relay Card option is not available for Frame C drives.
Sets the condition that changes the state of the output relay contacts.
Options 0 “Ready/Fault” Relay changes state when power is applied. This indicates that the drive is ready for operation. Relay returns drive to shelf state
1 “At Frequency” Drive reaches commanded frequency.
2 “MotorRunning” Motor is receiving power from the drive.
3 “Hand Active” Active when drive is in local control.
4 “Motor Overld” Motor overload condition exists.
5 “Ramp Reg” Ramp regulator is modifying the programmed accel/decel times to avoid an overcurrent or overvoltage fault from occurring.
6 “Above Freq” • Drive exceeds the frequency (Hz) value set in [Relay OutX Level].
7 “Above Cur” • Drive exceeds the current (% Amps) value set in [Relay OutX Level].
when power is removed or a fault occurs.
• Use T056 to set threshold.
• Use T056 to set threshold.
8 “Above DCVolt” • Drive exceeds the DC bus voltage value set in [Relay OutX Level].
9 “Above Anlg 2” • Analog input voltage (I/O Terminal 17) exceeds the value set in [Relay OutX Level].
10 “Above PF Ang” • Power Factor angle has exceeded the value set in [Relay OutX Level].
11 “Anlg In Loss” Analog input loss has occurred. Program T072
12 “ParamControl” Enables the output to be controlled over network communications by writing to [Relay OutX Level]. (0 = Off, 1 = On.)
13 “Retries Exst” Value set in A163
14 “NonRec Fault” • Number of retries for A163
15 “Reverse” Drive is commanded to run in reverse direction.
16 “Logic In 1” An input is programmed as “Logic In 1” and is active.
17 “Logic In 2” An input is programmed as “Logic In 2” and is active.
23 “Aux Motor” (Default) Auxiliary Mo tor is commanded to run. Refer to Appendix D
24 “Fault” (with FRN 7.xx and later) Relay output is inactive when power is applied to the drive and is active when a fault occurs. This is inverted from Option 0,
• Use T056 to set threshold.
• Do not use if T073
• This parameter setting can also be used to indicate a PTC trip point when the input (I/O Terminal 17) is wired to a PTC and
external resistor.
• Use T056 to set threshold.
• Use T056 to set threshold.
loss occurs.
• Non-resettable fault occurs OR
• A163 [Auto Rstrt Tries] is not enabled.
“Ready/Fault”.
[Analog In 2 Sel] is set to 3 “Voltage Mode - Bipolar”.
[Analog In 1 Loss] and/or T076 [Analog In 2 Loss] for desired action when input
[Auto Rstrt Tries] is exceeded.
[Auto Rstrt Tries] is exceeded OR
98 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
 Loading...
Loading...