

Page 1

1326AB High Performance
AC Servomotors
Product Data
Introduction This publication provides detailed information about 1326AB AC
Servomotors. The topics covered in this publication are listed below in
order of presentation.
Basic Servomotor Description page 2
Servomotor Options page 2
Catalog Number Explanations page 4
Servomotor Performance Data page 8
Special Order Motor Information (Non-Stocked Motors) page 17
Motor Dimensions page 18
Motor Options page 22
Cable Wiring Information page 28
Servomotor Application Guide page 30
Conversion Factors page 44
Page 2

Product Data
1326AB AC Servomotor
Basic Servomotor Description The 1326AB Servomotors are a family of high performance, three-phase,
brushless AC synchronous motors designed by Allen-Bradley to meet the
stringent requirements of servo system applications. This series of standard
AC servomotors can be used with 1391 AC Servo Controllers. The performance parameters of these motors with selected amplifiers are listed on
page 8. The typical speed-torque curves (see page 9) depict the operational envelope of these motor and controller combinations.
Each motor has the following standard features:
• Permanent magnet rotor for increased servo response.
• Three-phase sinusoidal wound stator field for direct transfer of heat to
ambient, and smooth operation at low speeds.
• Brushless resolver supplies position, commutation & velocity feedback
information. This also provides durability in harsh environments by not
having on-board electronics in the motor. 1391 A Quad B (optional)
encoder output (up to 2048 ppr) is generated via resolver feedback.
• 100% continuous rated output torque at stall (zero rpm).
• Precision balance of 0.0005” (0.0127 mm) total peak-peak
displacement.
• Vertical shaft up or down mounting.
• TENV construction.
• IP65 rated (when used with the Shaft Seal option) to withstand harsh
environments. Motor is dust-tight and able to withstand pulsating water
jets without liquid entering the motor.
Important: 1326AB motors lose the IP 65 rating when externally
mounted encoder/resolver feedback or blower packages are used.
• Normally closed thermal switch in the motor winding (rated 115V AC at
1A, 24V DC at 1A) provides thermal overload indication.
• Environmentally sealed power and feedback cable packages. Power and
resolver feedback cables can be ordered as standard (flex), track
(multi-flex) or extended length (ES).
• MIL spec connectors are standard.
• Ferrite magnets for cost effective performance.
• UL recognized insulation system (file # E57948).
Servomotor Options Options available for the 1326AB include (option code designation or
catalog number in parenthesis):
• Integral spring-set holding brakes with 90V DC coils (-A4, -A5, -A7) or
24V DC coils (-K4, -K5, -K7).
• Brake Power Supply (1326-MOD-BPS) converts 115V AC to the
voltage needed for 90V DC brakes (-A4, -A5 and -A7).
• Shaft Oil Seal kits (1326AB-MOD-SSV-xx) for field installation of
Viton shaft seals. Motor disassembly is not required.
• NEMA Inch (-11) or IEC metric flange mount (-21) with metric shafts.
2
Page 3
Product Data
1326AB AC Servomotor
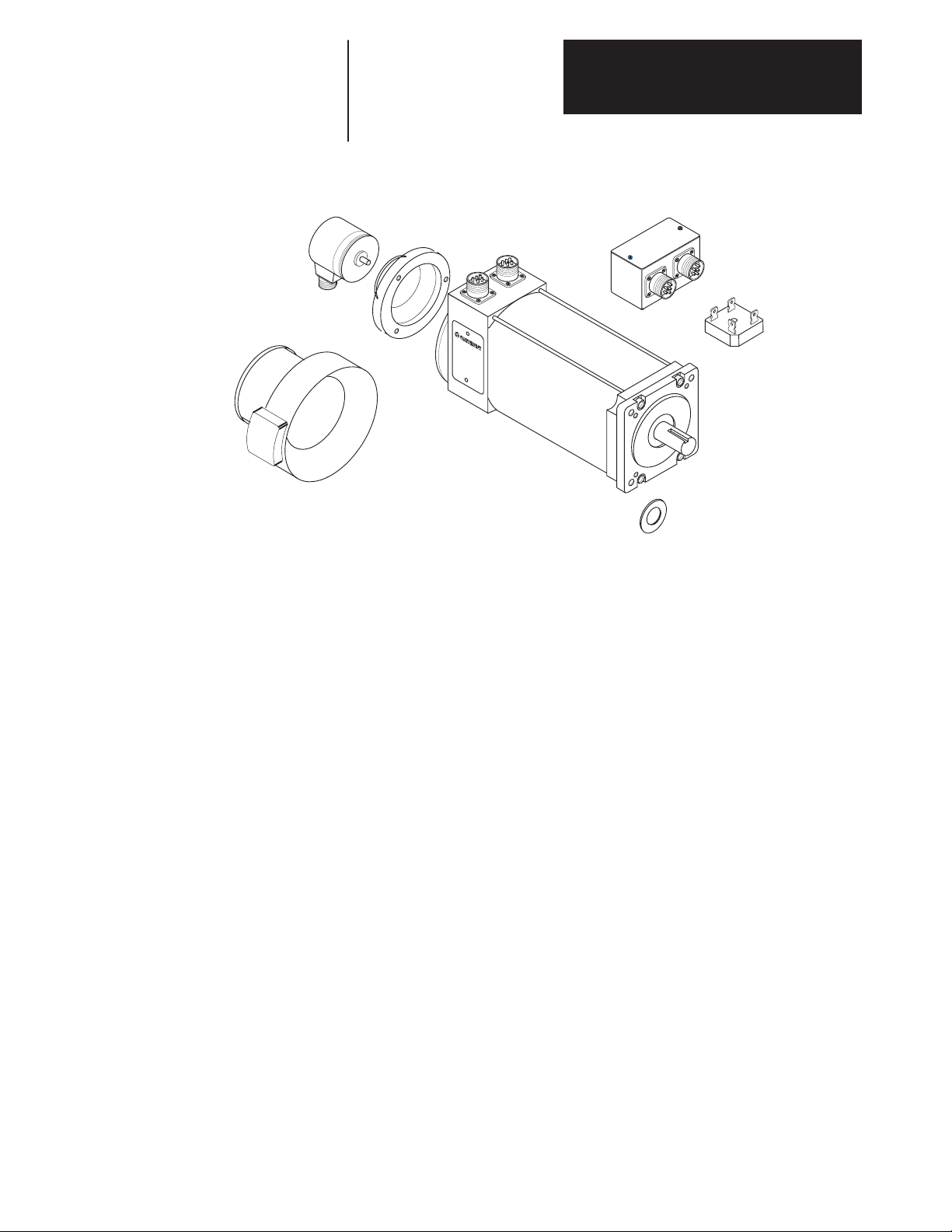
Figure 1
AC Servomotor Configuration and Options
Resolver/Encoder
Secondary Feedback Packages
Blower Cooling Kits
Feedback Mounting Kits
Integral Brake
(Internal to Motor)
Viton Shaft Oil Seal
• Resolver Feedback Packages (1326AB-MOD-Vxxxx) provide 4.25”
Junction Box Kit
90V DC Brake
Power Supply
(108 mm) transducers which offer absolute/vernier or single brushless
resolver feedback for use with Allen-Bradley 8600GP, IMC rack and S
Class motion controllers.
• Junction Box Kit (1326AB-MOD-RJxx) available with axially mounted
connectors. Connector version allows the motor connectors to be
brought out axially to the motor (rather than radially) without further
wiring.
• Secondary Feedback Mounting Kits (1326AB-MOD-Mx) for field
installation of an Allen-Bradley Encoder (845H) or resolver. Using a
1326AB motor with a 1391B-ES (or 1391-DES) with A Quad B
feedback (up to 2048 ppr) eliminates the need for encoder mounting.
• Blower Cooling Kit (1326AB-MOD-G3, G4) provides air over cooling
for up to 35% more torque output on most 1326AB “C” frame motors.
The kit can be field mounted on the rear of 1326AB-Cxx motors (including motors with brakes). For motors using secondary motor
mounted feedback (1326AB-MOD-M60), use option “G4.”
• Cables for power (1326-CPxx . .) and feedback (1326-CFx . . - com-
mutation, 1326-CEx . . - encoders) are available in lengths up to 100 ft
.(30 m) for standard and high flex applications Power (1326ES-CPxx . .)
and commutation (1326ES-CFx . .) cables over 100 ft. (30 m), up to 300
ft. (90 m) are available when using 1391B-ES or 1391-DES drives only.
All kits are supplied as motor accessories and must be specified as a
separate item.
3
Page 4
Product Data
1326AB AC Servomotor
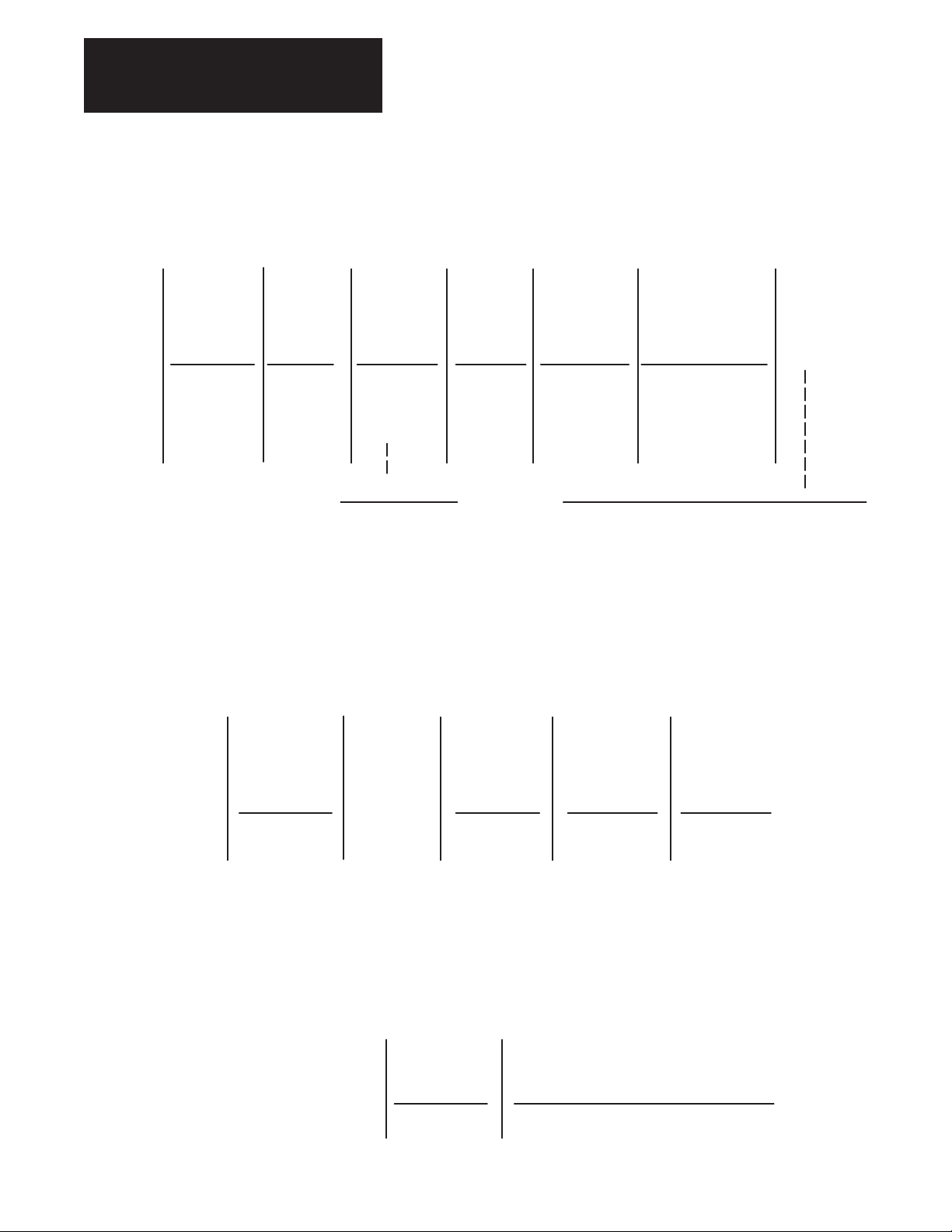
1326AB Servomotor
1326 A 3
First Position Second Position Third Position
Bulletin
Number
Type
Letter
A
Description
AC
Servomotor
PM Type
Design
Description
Factory
use only
1326AB MOD
–
Fourth Position
Series
Description
Sequentially
lettered to
designate frame
diameters.
Description
Code
4.25” (108 mm)
A
5.88” (149 mm)
B
7.63” (194 mm)
C
SS V
–
Fifth Position
Motor
Length
Description
Sequentially
numbered to
indicate stack
length within
a given frame
size.
Shaft Oil Seal Kit
E
Sixth Position
Max. Op.
Speed
RPM
Std.
Code
1600
B
2000
C
3000
E
5000
G
Code
A4
A5
A7
K4
K5
K7
–
A
–
ES/DES
2000
3000
4000
6000
Description
72 lb.-in. (8.1 N-m) Holding Brake w/90V DC Coil.
120 lb.-in. (13.6 N-m) Holding Brake w/90V DC Coil.
400 lb.-in. (45.2 N-m) Holding Brake w/90V DC Coil.
72 lb.-in. (8.1 N-m) Holding Brake w/24V DC Coil.
120 lb.-in. (13.6 N-m) Holding Brake w/24V DC Coil.
400 lb.-in. (45.2 N-m) Holding Brake w/24V DC Coil.
11
Seventh Position
Mounting & Shaft
Description
Description
Code
Inch Combination
11
Face/Flange with
Keyway
21
NEMA/IEC Metric
Flange with
Keyway
–BA
A4
Eighth Position
Standard
Options
1–
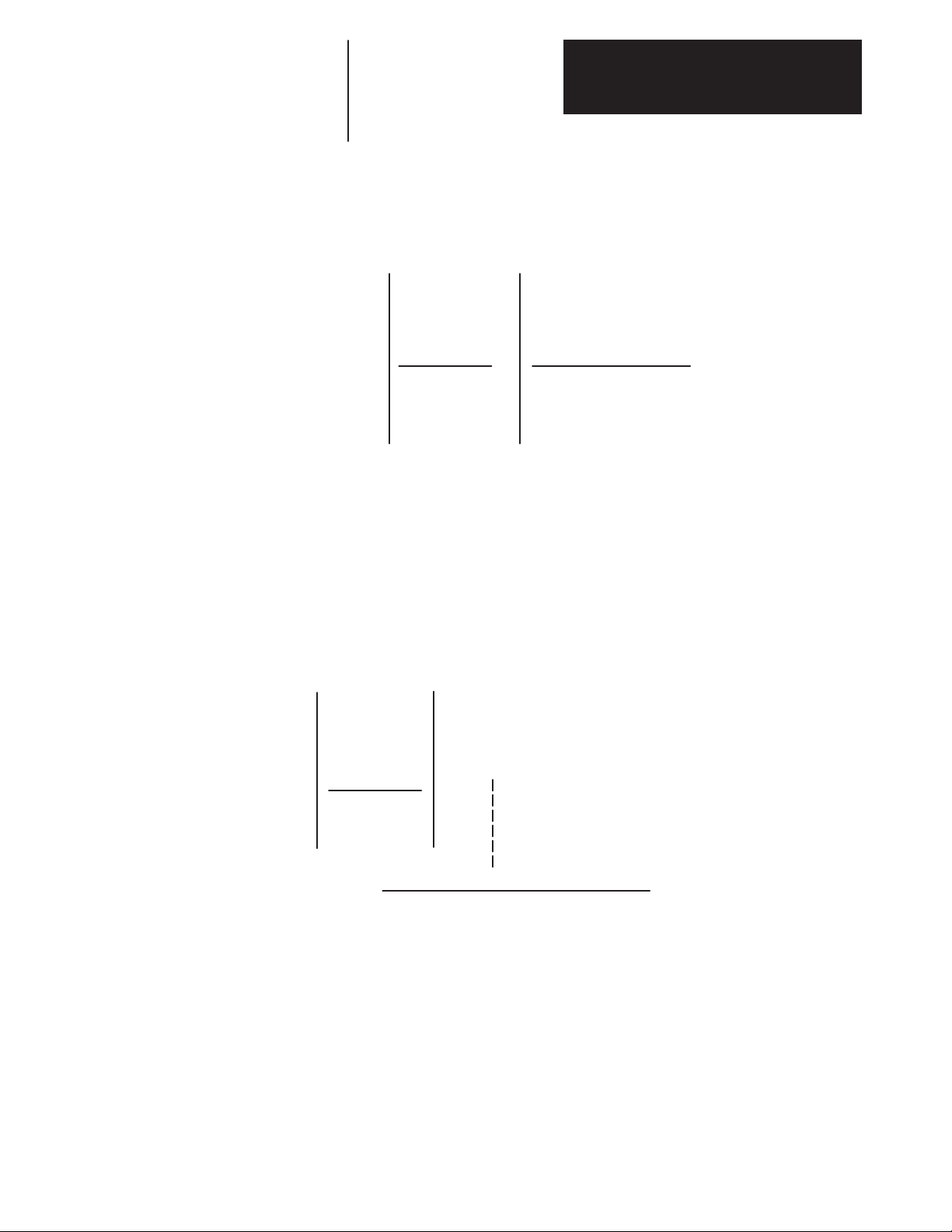
First Position Second Position Third Position
Bulletin
Number
4
Type
Code
MOD
Description
Modification
Kit
1
Bulletin
Number
Shaft
Seal
“A” Series motors with brake must use 1326AB-MOD-SSV-A2.
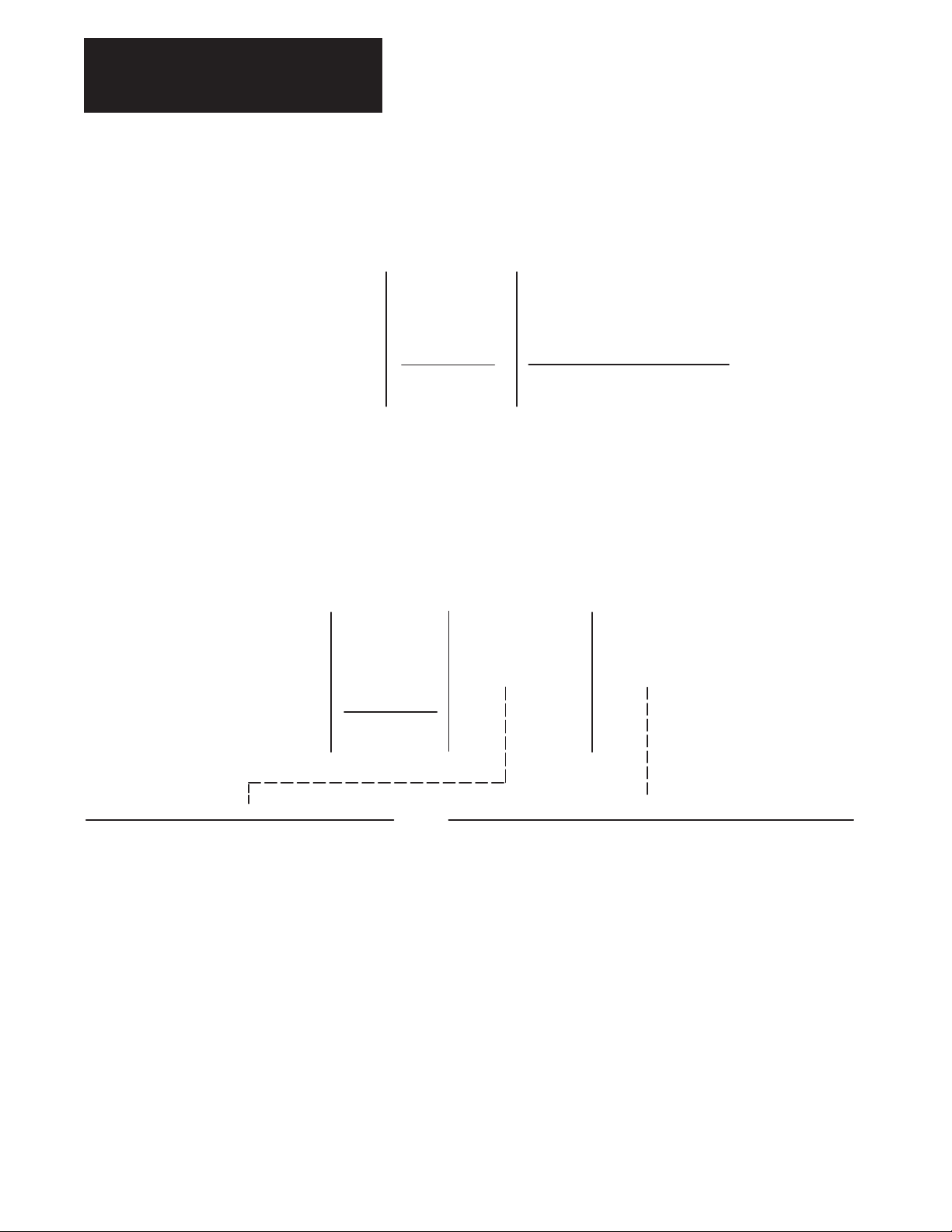
Brake Power Supply Rectifier
1326 MOD
–
Type
Code
MOD
2
Up to 4 brakes per rectifier can be used.
Fourth Position
Material
Letter
V
Description
Modification
Kit
Description
Viton
–
Description
Code
BPS
Fifth Position
Motor
Series
for . . .
Letter
-A Series
A
-B Series
B
-C Series
C
BPS
Description
Single-phase, full-wave, screw mount rectifier
with surge suppressor network. 115V AC input,
for use with 90V DC brakes.
Sixth Position
Motor
Mounting
Number
1
2
2
1
Description
Std. Inch
Metric
Page 5
Product Data
1326AB AC Servomotor
Motor Junction Box Kit
1326AB MOD RJAB
First Position Second Position Third Position
Bulletin
Number
3
The motor comes standard with IP65 plug style connectors mounted radially to the motor. This kit allows the
connectors to be brought out axially from the motor without further wiring. Kit includes Motor Junction Box
and Mounting Hardware.
–
Type Description
Description
Code
Modification
MOD
Kit
Feedback Mounting Adapter Kit
3
–
Code
Description
RJAB
For all AB-A and AB-B
Series Motors
RJBC
For all AB-B4 and AB-Cx
Series Motors
4
1326AB MOD
First Position Second Position Third Position
Bulletin
Number
–
Type
Code
MOD
Description
Modification
1
Kit
Code
M22
M23
M24
M25
M26
M40
M50
M60
–
Description
Type VC/VD 4.25” (108mm) Resolver for AB-B series motor
Type VC/VD 4.25” (108mm) Resolver for AB-C series motor
0.375” (9.5 mm) diameter heavy duty shaft extension adapter
0.625” (15.9 mm) diameter heavy duty shaft extension for Type
VC/VD 4.25” (108 mm) resolver
Foot mounting kit for M25
A-B 845H Encoder for AB-A series motor
A-B 845H Encoder for AB-B series motor
A-B 845H Encoder for AB-C series motor
M40
Mounting Adapter
Kit for . . .
4
All kits contain a feedback device mounting adapter and mounting hardware. M40, M50 and M60 include a
motor to encoder coupling. M22 and M23 do not include a coupling since it is included with the resolver
feedback device.
5
Page 6
Product Data
1326AB AC Servomotor
–
VC
5
Coupling
Size
Size – Motor Shaft to Encoder Shaft
Code
3/8” to 3/8” (9.5 mm to 9.5 mm)
C1
1/4” to 3/8” (6.4 mm to 9.5 mm)
C2
Feedback Coupling
1326 MOD C1
First Position Second Position Third Position
Bulletin
Number
5
The feedback coupling is included as standard with all Feedback Mounting Adapter Kits.
1326AB MOD
First Position Second Position Third Position
–
–
Type
Description
Code
Modification
MOD
Kit
Resolver Feedback Package
–
1:1
Fourth Position
Bulletin
Number
Code
Description
VC
4.25” (108 mm) feedback package with cast housing
and single or vernier (dual) format with receiver
(Harowe 11BRW-300-F-58A or equivalent) type
resolver(s) for use with 8200, IMC 120, 121, 123.
VD
4.25” (108 mm) feedback package with cast housing
and single or vernier (dual) format with transmitter
(Harowe 11BRCX-300-C10/6 or equivalent) type
resolver(s) for use with A-B series 8600, MAX and S
Class controllers with a REC 4096 Board.
Type
Code
MOD
Description
Modification
6
Kit
Resolver Feedback
Package
Code
Description
1:1
Single device format – 1 turn of the motor shaft to 1 turn of the resolver.
1:2
Single device format – 1 turn of the motor shaft to 2 turns of the resolver.
1:2.5
Single device format – 1 turn of the motor shaft to 2.5 turns of the resolver.
1:5
Single device format – 1 turn of the motor shaft to 5 turns of the resolver.
255
Absolute master/vernier format – 1:1 input/master, 255:256 master/vernier
]
for IMC
120, 121, 123 only.
256
Absolute master/vernier format – 1:1 input/master, 256:255 master/vernier
for 8600 series and MAX, IMC S class controls with a REC 4096 Board.
424
Absolute master/vernier format – 1:1 input/master, 424:425 master/vernier
for IMC 120, 121, 123 only.
425
Absolute master/vernier format – 1:1 input/master, 425:424 master/vernier
for 8600 series and MAX, IMC S class controls with a REC 4096 Board.
800
Absolute master/vernier format – 1:1 input/master, 800:801 master/vernier
for IMC 120, 121, 123 only.
801
Absolute master/vernier format – 1:1 input/master, 801:800 master/vernier
for 8600 series controllers (is not applicable for use with MAX/S Class
controls)
Gear Ratio
Input:Resolver
6
Kit includes Resolver Feedback Package, mounting hardware and 3/8” to 3/8” (9.5 mm to 9.5mm) resolver to motor mounting coupling.
6
Page 7
Blower Mod Kit
Product Data
1326AB AC Servomotor
1326AB MOD G3
Bulletin
Number
1326 C
First Position Second Position Third Position
Bulletin
Number
Description
Letter
Standard Cable
Blank
7
Extended length
ES
cable – used
with 1391B-ES
and 1391-DES
Only
–
Type
Letter
C
Description
Connector
& Cable
Assembly
Function
Letter
P
F
E
V
–
Type Description
Description
Code
Modification
MOD
Kit
Power and Feedback Cables
–
Motor Series
Code
Rear mounted blower for the C4B and
G3
C2E motors
“Saddle” type blower for the C4B motor
G4
PAB
Description
Power Connection
Commutation &
Feedback Connection
845H Encoder
All 4.25” (108 mm)
Resolver Packages
Fourth Position
Motor Size
Used On
Type
Code
Series A & B
AB
(except 1326AB-B4)
Series C &
C
1326AB-B4
All SeriesU
Fifth Position
Power Track
Cable
Letter
T
Blank
T
Description
All Series,
used for
high flex
applications
Standard
Cable
15
Sixth Position
Cable
Length
Code
Description
K
Connector Kit
(No Cable)
15
15’ (4.6 m)
30
30’ (9.1 m)
50
50’ (15.2 m)
100
100’ (30.4 m)
150
150’ (45.7 m)
200
200’ (61 m)
250
250’ (76.2 m)
300
300’ (91.4 m)
7
7
7
7
7
The Extended Length option is only available for 1326-CFUxx, CPABxx and CPCxx cables and can only be used with 1391B-ES and 1391-DES drives.
7
Page 8
Product Data
1326AB AC Servomotor
Servomotor Performance Data The following section contains 1326AB performance data. Included is a
Selection List detailing the performance parameters of selected amplifier/
motor combinations, followed by typical speed-torque curves.
1391B Servo System Selection List
Continuous
Stall Torque
(lb.-in./N-m)
16/1.8
32/3.6
48/5.4
93.3/10.53
102/11.5
140/15.8
153/17.3
210/23.7
310/35.0
420/47.4
420/47.4
Peak Stall
Torque
(lb.-in./N-m)
48/5.4
96/10.84
96/10.84
186.6/21.0
204/23.0
280/31.6
306/34.6
420/47.5
568/64.1
811/91.7
840/94.8
1391B Rated
Speed
(rpm)
5000
3000
3000
3000
3000
3000
3000
3000
3000
2000
1600
Motor
Catalog Number
1326AB-A1G
1326AB-A2E
1326AB-A3E
1326AB-B2E
1326AB-B2E
1326AB-B3E
1326AB-B3E
1326AB-C2E
1326AB-C3E
1326AB-C4C
1326AB-C4B
Servo Amplifier
Catalog Number
1391B-AA15
1391B-AA15
1391B-AA15
1391B-AA15
1391B-AA22
1391B-AA22
1391B-AA45
1391B-AA45
1391B-AA45
1391B-AA45
1391B-AA45
1391B-ES/1391-DES Servo System Selection List
Continuous
Stall Torque
(lb.-in./N-m)
16/1.8
32/3.6
48/5.4
93.3/10.53
102/11.5
140/15.8
153/17.3
210/23.7
310/35.0
420/47.4
420/47.4
1
All ratings are for 40° C motor ambient,110° C case and 60° C amplifier ambient. For extended ratings at lower ambients contact Allen-Bradley.
2
The motor contains two thermal switches wired in series that will open on an overtemperature condition. They are set to open at 150° C (typical) and close at 90-100° C
(typical). Contacts are rated for 1A at 115V AC, 1A at 24V DC.
3
–10% line voltage maximum.
4
Use either 1391B-ES or 1391-DES drives.
Peak Stall
Torque
(lb.-in./N-m)
48/5.4
96/10.84
144/16.3
170.7/19.3
279/31.5
280/31.6
459/51.9
569/64.3
568/64.1
811/91.7
989/111.8
1391B Rated
Speed
(rpm)
6000
4000
4000
4000
4000
4000
4000
4000
4000
3000
2000
Motor
Catalog Number
1326AB-A1G
1326AB-A2E
1326AB-A3E
1326AB-B2E
1326AB-B2E
1326AB-B3E
1326AB-B3E
1326AB-C2E
1326AB-C3E
1326AB-C4C
1326AB-C4B
Servo Amplifier
Catalog Number
1391B-ESAA15
1391B-ESAA15
1391B-ESAA15
1391B-ESAA15
1391B-ESAA22
1391B-ESAA22
1391B-ESAA45
1391B-ESAA45
1391B-ESAA45
1391B-ESAA45
1391B-ESAA45
1, 2
4
Amperes at
Continuous
Torque
4.5
5.2
7.8
15.0
16.4
22.5
24.6
33.2
49.1
46.6
38.2
Amperes at
Continuous
Torque
4.5
5.2
7.8
15.0
16.4
22.5
24.6
33.2
49.1
46.6
38.2
Rotor
Inertia
(lb.-in.-s
0.004/0.0005
0.007/0.0008
0.010/0.001
0.05/0.006
0.05/0.006
0.08/0.009
0.08/0.009
0.14/0.015
0.22/0.024
0.29/0.032
0.29/0.032
1, 2
Rotor
Inertia
(lb.-in.-s
0.004/0.0005
0.007/0.0008
0.010/0.001
0.05/0.006
0.05/0.006
0.08/0.009
0.08/0.009
0.14/0.015
0.22/0.024
0.29/0.032
0.29/0.032
2
/kg-m2)
2
/kg-m2)
Rated
Output
(kW)
0.9
1.1
1.2
2.28
2.5
3.5
3.8
5.2
7.5
7.0
5.6
Rated
Output
(kW)
0.9
1.1
1.6
3.0
3.3
4.7
5.1
6.9
10.0
3
9.3
7.5
8
Page 9
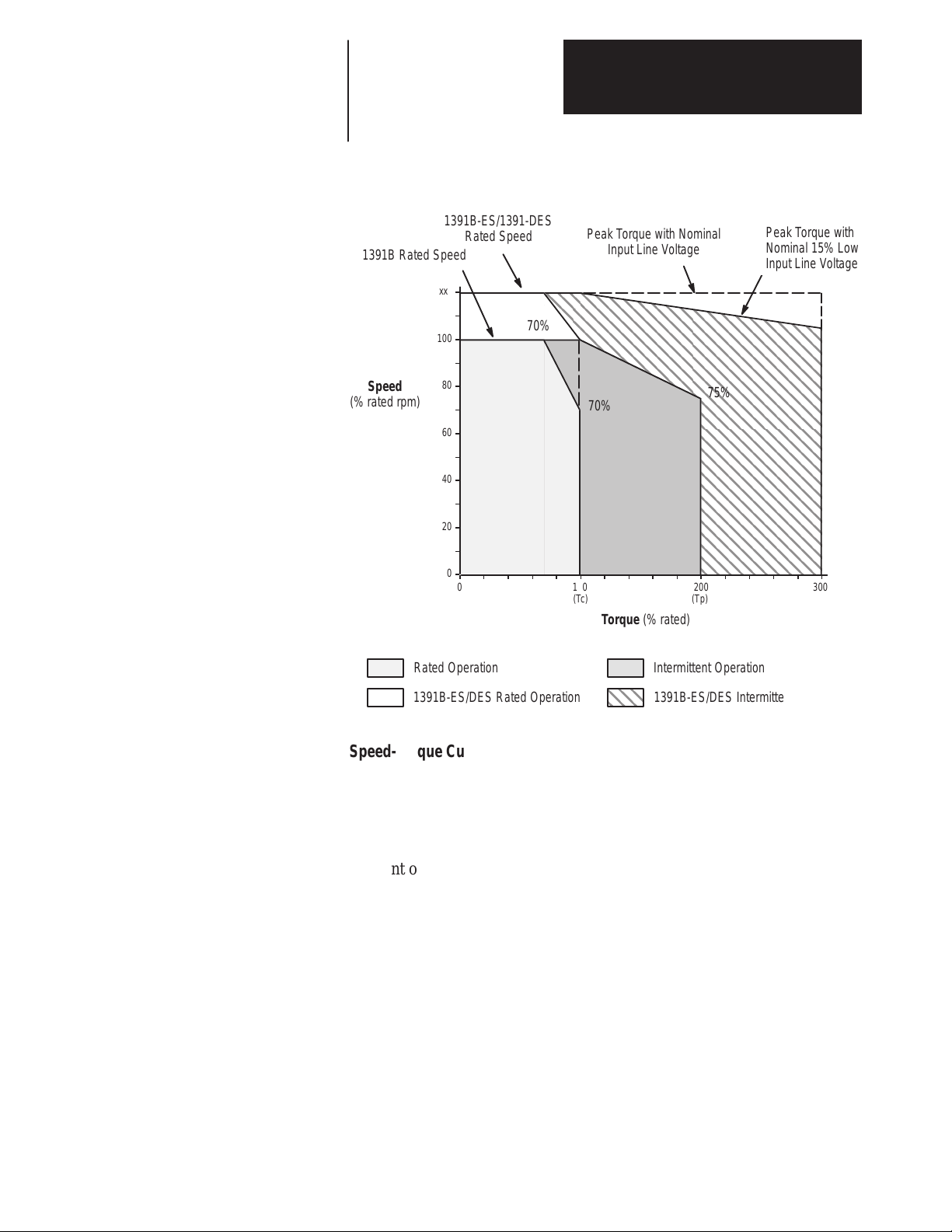
Figure 2
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
È
È
È
È
È
È
È
È
È
È
È
Typical 1326AB Speed-Torque Curve
Product Data
1326AB AC Servomotor
1391B Rated Speed
Speed
(% rated rpm)
1391B-ES/1391-DES
Rated Speed
Peak Torque with Nominal
Input Line Voltage
120
xx
ÇÇÇÇ
ÈÈ
100
ÇÇÇÇ
ÈÈ
ÇÇÇÇ
ÈÈ
80
ÇÇÇÇ
ÈÈ
ÇÇÇÇ
ÈÈ
60
ÇÇÇÇ
ÈÈ
ÇÇÇÇ
ÈÈ
40
ÇÇÇÇ
ÈÈ
ÇÇÇÇ
ÈÈ
20
ÇÇÇÇ
ÈÈ
ÇÇÇÇ
ÈÈ
0
0 40 80 120 160 200 240 280
70%
75%
70%
100 300
(Tc) (Tp)
Torque (% rated)
Intermittent OperationRated Operation
Peak Torque with
Nominal 15% Low
Input Line Voltage
1391B-ES/DES Rated Operation 1391B-ES/DES Intermittent Operation
Speed-Torque Curves
Typical speed-torque curves for the standard 1326AB servomotors are
contained on the following pages. Definitions of the terms used are
provided below.
Tc – rated torque of motor with windings at rated temperature and an
ambient of 40°C. The controller is operating in a rated ambient of 60°C.
Tp – the peak torque that can be produced by the motor/controller
combination with both at rated temperature and the motor in a 40°C
ambient and the controller in a 60°C ambient. Since 200% current torque
peaks are common in many applications for optimal controller usage, the
following curves show typical system performance. Higher peak torques
are permissible where RMS torque is less than or equal to the rated torque
(Tc). 1391B-ES/1391-DES operation is shown in the outer envelope and
will show higher speed and 300% torque capability.
Rated Speed – the operating speed of the controller and motor
combination at which a minimum of 70% of continuous rated torque (Tc)
can be developed. This point is defined with the motor at 25°C and
controller operating in a 60°C ambient.
9
Page 10
Product Data
1326AB AC Servomotor
Rated Operation Area – boundary of speed-torque curve where the motor
and controller combination may operate on a servo basis without exceeding
the RMS rating of either. See page 31 for formula details.
RMS Torque =
Tpa2 x t1 + Tss2 x t2 + Tpd2 x t3 + Tr2 x t
t1 + t2 + t3 + t
4
4
Intermittent Operation Area – Boundary of speed-torque curve where
the motor and controller combination may operate in acceleration-deceleration mode without exceeding peak rating of either, provided that the duty
cycle RMS continuous torque limit is not exceeded.
Continuous Current – Rated current of motor with windings at rated
temperature and an ambient of 40°C. The controller is operating in a rated
ambient of 60°C.
Peak Current – The amount of current which can be applied to the motor
without causing damage to the motor.
Mechanical Time Constant – Time taken by the motor to reach 63% of
final speed when a step voltage is applied.
Electrical Time Constant – The time required for the motor to reach 63%
of rated current.
Max. Ambient Temperature – Maximum environmental temperature in
which the motor can be operated at rated loads without exceeding its
insulation type temperature rise limits.
Insulation Class – Designation of operating temperature limits of the
motor insulation materials.
Thermal Time Constant – Time for motor windings to reach 63% of
continuous temperature rise with constant watts loss.
Torque Constant – At the stated motor temperature the amount of torque
developed for one ampere of motor current.
Voltage Constant – Value of the generated voltage at a specified speed
when the rotor is moved mechanically in the magnetic field.
Terminal Resistance – Winding resistance.
Inductance – Winding inductance measured by a step input of zero
impedance voltage applied to the locked rotor.
Rotor Polar Moment of Inertia – Moment of inertia about the axis of
rotation.
Motor Weight – Weight of the complete motor (including brake, if
supplied) less the weight of options.
Balance – Compensation of rotor weight distribution to reduce vibrational
resonance. Motors are factory balanced under running speeds.
10
Page 11
Product Data
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
È
È
È
È
È
È
È
È
È
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
È
È
È
È
È
È
È
È
È
1326AB AC Servomotor
Figure 3
1326AB-A1G and A2E Motor Performance Curves
Speed (rpm)
1326AB-A1G Motor 1326AB-A2E Motor
6000
5400
ÇÇÇ
ÈÈ
4800
ÇÇÇ
ÈÈ
4200
ÇÇÇ
ÈÈ
3600
ÇÇÇ
ÈÈ
3000
ÇÇÇ
ÈÈ
2400
ÇÇÇ
ÈÈ
1800
ÇÇÇ
ÈÈ
1200
ÇÇÇ
ÈÈ
600
ÇÇÇ
ÈÈ
0
0 1020304050
Torque (Lb.-In.)
1391B Rated
Operation
1391B Intermittent
Operation
Speed (rpm)
4000
3600
ÇÇÇ
ÈÈ
3200
ÇÇÇ
ÈÈ
2800
ÇÇÇ
ÈÈ
2400
ÇÇÇ
ÈÈ
2000
ÇÇÇ
ÈÈ
1600
ÇÇÇ
ÈÈ
1200
ÇÇÇ
ÈÈ
800
ÇÇÇ
ÈÈ
400
ÇÇÇ
ÈÈ
0
0 102030405060708090100
Torque (Lb.-In.)
1391B-ES/1391-DES
Rated Operation
1391B-ES/1391-DES
Intermittent Operation
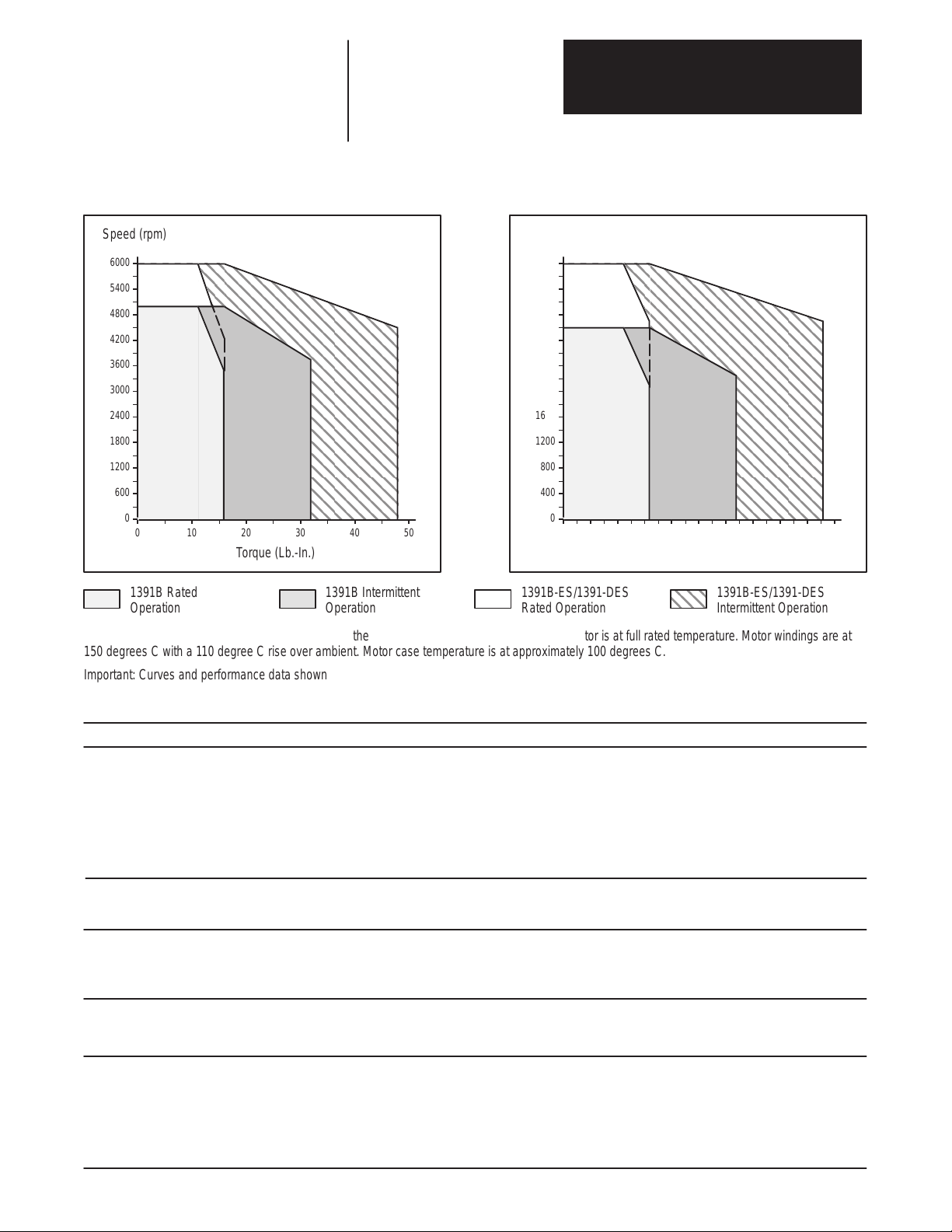
Speed-torque curves show the rated performance of the servomotor in a 40 degree C ambient. Motor is at full rated temperature. Motor windings are at
150 degrees C with a 110 degree C rise over ambient. Motor case temperature is at approximately 100 degrees C.
Important: Curves and performance data shown are for motor and amplifier combinations where amplifier rating is equal to or greater than Ic of motor
Category
General
Parameter
Continuous Stall Torque at 40° C Ambient
Rated Output/1391B-ES, DES Rated Output
Peak Stall Torque/1391B-ES, DES Peak Stall Torque
Continuous Stall Current
Peak Stall Current/1391B-ES, DES Peak Stall Current
Mechanical Time Constant
Electrical Time Constant
3
3
3
Rated Speed/1391B-ES, DES Rated Speed
Thermal
Maximum Ambient Temperature (without derating)
Insulation Class
Thermal Time Constant
Winding
Torque Constant at 25° C
Voltage Constant RMS (L-L) at 25° C
Terminal Resistance ohms (L-L) at 25° C
Inductance mH (L-L) at 25° C
Mechanical
1
T o obtain vibration velocity in inches (mm)/second use the following formula: VV = (D
where: D
2
peak-peak displacement
3
at 40° C
Rotor Polar Moment of Inertia
Motor Weight
1
Balance
= peak-peak displacement in in. (mm)
p-p
= Vibration velocity in in. (mm)/second
V
V
rpm = motor speed
Units
lb.-in. (N-m)
3
kW
lb.-in. (N-m)
amperes
amperes
3
milliseconds
3
milliseconds
rpm
degrees C
minutes
lb.-in. (N-m)/A
volts/1000 rpm
ohms
millihenry
2
(kg-m2)
lb.-in.-s
lbs. (kg)
2
in. (mm)
x rpm) /27.01
p-p
1326AB-A1G
16.0 (1.8)
0.7/0.9
32.0 (3.6)/48.0 (5.4)
4.5
9.0/13.5
10.0
3.4
5000/6000
40.0
H
23
4.18 (0.47)
28.5
1.9
8.4
0.004 (0.0005)
22 (10.0)
0.0005 (0.0127)
1326AB-A2E
32.0 (3.6)
0.8/1.1
64.0 (7.2)/96.0 (10.8)
5.2
10.4/15.6
9.2
3.4
3000/4000
40.0
H
33
7.23 (0.82)
49.5
2.89
12.7
0.007 (0.0008)
28 (12.7)
0.0005 (0.0127)
11
Page 12
Product Data
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
È
È
È
È
È
È
È
È
È
È
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
È
È
È
È
È
È
È
È
È
È
1326AB AC Servomotor
Figure 4
1326AB-A3E and B2E Motor Performance Curves
Speed (rpm) Speed (rpm)
4000
ÇÇÇ
ÈÈ
3600
ÇÇÇ
ÈÈ
3200
ÇÇÇ
ÈÈ
2800
ÇÇÇ
ÈÈ
2400
ÇÇÇ
ÈÈ
2000
ÇÇÇ
ÈÈ
1600
ÇÇÇ
ÈÈ
1200
ÇÇÇ
ÈÈ
800
ÇÇÇ
ÈÈ
400
ÇÇÇ
ÈÈ
0
0 20 40 60 80 100 120 140 160
1326AB-A3E Motor 1326AB-B2E Motor
4000
ÇÇÇ
ÈÈ
3600
ÇÇÇ
ÈÈ
3200
ÇÇÇ
ÈÈ
2800
ÇÇÇ
ÈÈ
2400
ÇÇÇ
ÈÈ
2000
ÇÇÇ
ÈÈ
1600
ÇÇÇ
ÈÈ
1200
ÇÇÇ
ÈÈ
800
ÇÇÇ
ÈÈ
400
ÇÇÇ
ÈÈ
0
0 30 60 90 120 150 180 210 240 270
Torque (Lb.-In.) Torque (Lb.-In.)
1391B Rated
Operation
1391B Intermittent
Operation
1391B-ES/1391-DES
Rated Operation
1391B-ES/1391-DES
Intermittent Operation
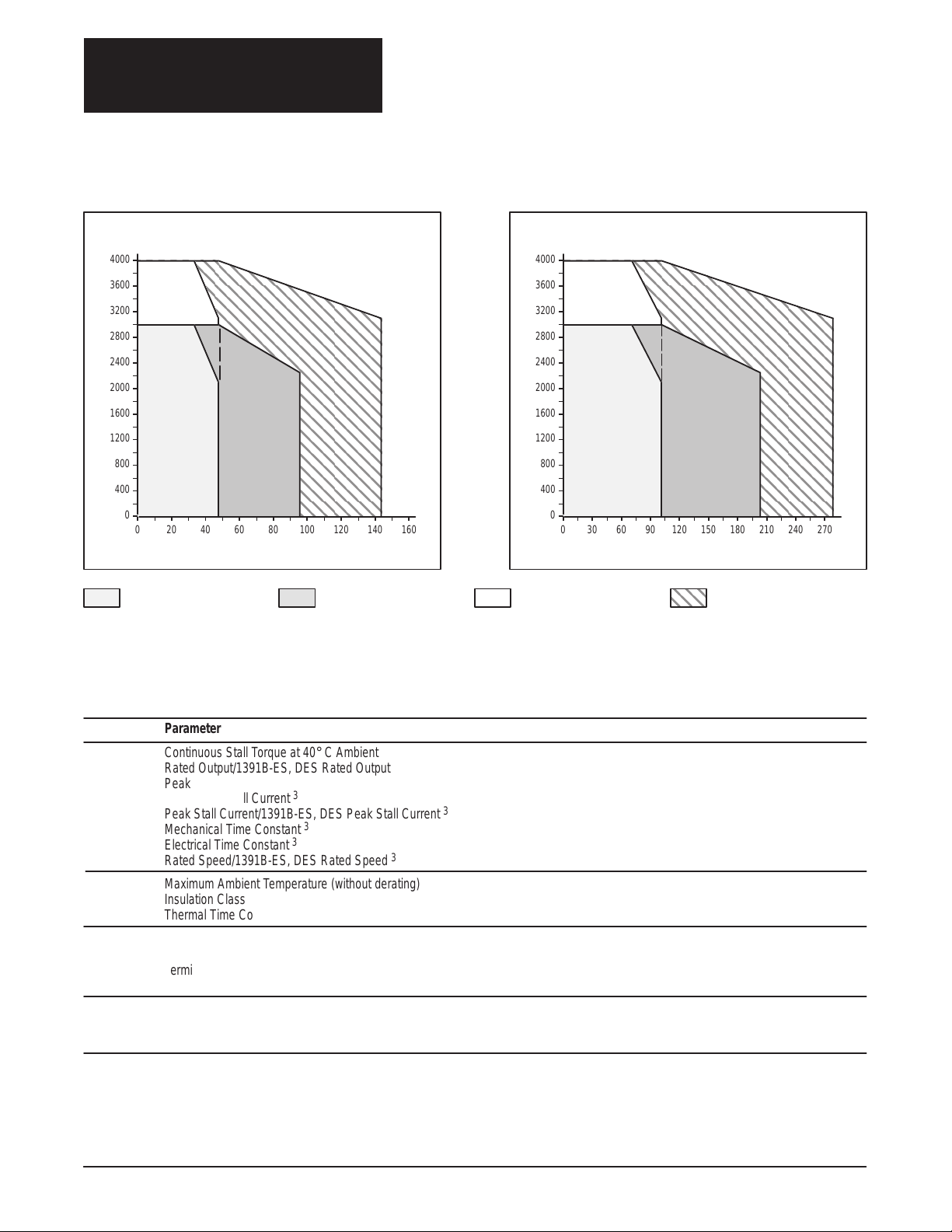
Speed-torque curves show the rated performance of the servomotor in a 40 degree C ambient. Motor is at full rated temperature. Motor windings are at
150 degrees C with a 110 degree C rise over ambient. Motor case temperature is at approximately 100 degrees C.
Important: Curves and performance data shown are for motor and amplifier combinations where amplifier rating is equal to or greater than Ic of motor
Category
General
Parameter
Continuous Stall Torque at 40° C Ambient
Rated Output/1391B-ES, DES Rated Output
Peak Stall Torque/1391B-ES, DES Peak Stall Torque
Continuous Stall Current
Peak Stall Current/1391B-ES, DES Peak Stall Current
Mechanical Time Constant
Electrical Time Constant
3
3
3
Rated Speed/1391B-ES, DES Rated Speed
Thermal
Maximum Ambient Temperature (without derating)
Insulation Class
Thermal Time Constant
Winding
Torque Constant at 25° C
Voltage Constant RMS (L-L) at 25° C
Terminal Resistance ohms (L-L) at 25° C
Mechanical
1
T o obtain vibration velocity in inches (mm)/second use the following formula: VV = (D
where: D
2
peak-peak displacement
3
at 40° C
12
Inductance mH (L-L) at 25° C
Rotor Polar Moment of Inertia
Motor Weight
1
Balance
= peak-peak displacement in in. (mm)
p-p
= Vibration velocity in in. (mm)/second
V
V
rpm = motor speed
Units
lb.-in. (N-m)
kW
3
lb.-in. (N-m)
amperes
3
amperes
milliseconds
3
milliseconds
rpm
degrees C
minutes
lb.-in. (N-m)/A
volts/1000 rpm
ohms
millihenry
2
(kg-m2)
lb.-in.-s
lbs. (kg)
2
in. (mm)
x rpm) /27.01
p-p
1326AB-A3E
48.0 (5.4)
1.2/1.6
96.0 (10.84)/144.0 (16.3)
7.8
15.6/23.4
8.6
3.4
3000/4000
40.0
H
38
7.24 (0.82)
49.5
1.9
8.4
0.010 (0.001)
37 (16.8)
0.0005 (0.0127)
1326AB-B2E
102.0 (11.5)
2.5/3.3
204 (23.0)/279 (31.5)
16.4
32.8/44.9
7.8
7.7
3000/4000
40.0
H
56
7.31 (0.83)
49.9
0.35
3.52
0.050 (0.006)
61 (27.7)
0.0005 (0.0127)
Page 13
Product Data
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
È
È
È
È
È
È
È
È
È
È
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
È
È
È
È
È
È
È
È
È
È
1326AB AC Servomotor
Figure 5
1326AB-B3E and C2E Motor Performance Curves
Speed (rpm) Speed (rpm)
4000
ÇÇÇ
ÈÈ
3600
ÇÇÇ
ÈÈ
3200
ÇÇÇ
ÈÈ
2800
ÇÇÇ
ÈÈ
2400
ÇÇÇ
ÈÈ
2000
ÇÇÇ
ÈÈ
1600
ÇÇÇ
ÈÈ
1200
ÇÇÇ
ÈÈ
800
ÇÇÇ
ÈÈ
400
ÇÇÇ
ÈÈ
0
0 50 100 150 200 250 300 350 400 450
1326AB-B3E 1326AB-C2E
4000
ÇÇÇ
ÈÈ
3600
ÇÇÇ
ÈÈ
3200
ÇÇÇ
ÈÈ
2800
ÇÇÇ
ÈÈ
2400
ÇÇÇ
ÈÈ
2000
ÇÇÇ
ÈÈ
1600
ÇÇÇ
ÈÈ
1200
ÇÇÇ
ÈÈ
800
ÇÇÇ
ÈÈ
400
ÇÇÇ
ÈÈ
0
0 60 120 180 240 300 360 420 480 540
Torque (Lb.-In.) Torque (Lb.-In.)
1391B Rated
Operation
1391B Intermittent
Operation
1391B-ES/1391-DES
Rated Operation
1391B-ES/1391-DES
Intermittent Operation
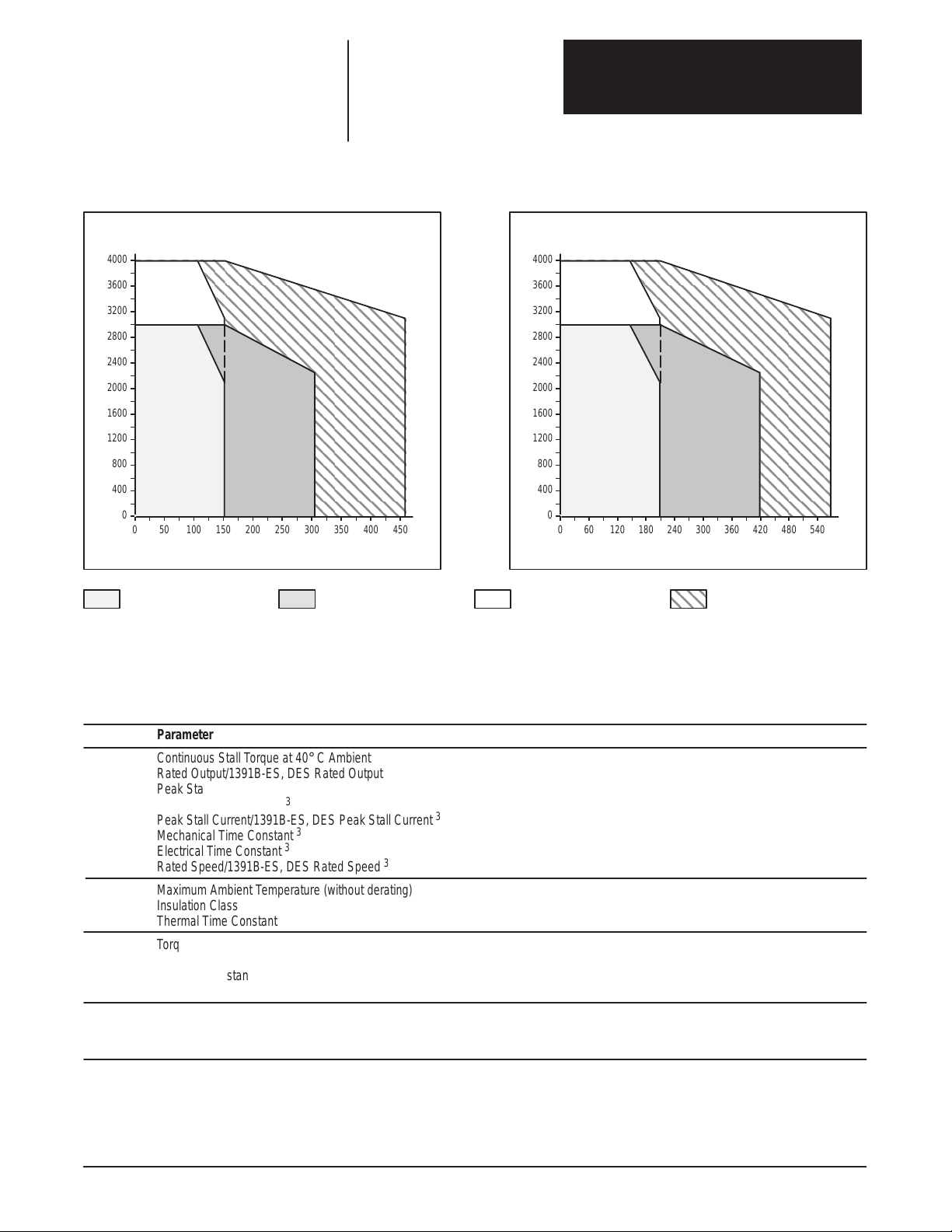
Speed-torque curves show the rated performance of the servomotor in a 40 degree C ambient. Motor is at full rated temperature. Motor windings are at
150 degrees C with a 110 degree C rise over ambient. Motor case temperature is at approximately 100 degrees C.
Important: Curves and performance data shown are for motor and amplifier combinations where amplifier rating is equal to or greater than Ic of motor
Category
General
Parameter
Continuous Stall Torque at 40° C Ambient
Rated Output/1391B-ES, DES Rated Output
Peak Stall Torque/1391B-ES, DES Peak Stall Torque
Continuous Stall Current
Peak Stall Current/1391B-ES, DES Peak Stall Current
Mechanical Time Constant
Electrical Time Constant
3
3
3
Rated Speed/1391B-ES, DES Rated Speed
Thermal
Maximum Ambient Temperature (without derating)
Insulation Class
Thermal Time Constant
Winding
Torque Constant at 25° C
Voltage Constant RMS (L-L) at 25° C
Terminal Resistance ohms (L-L) at 25° C
Mechanical
1
T o obtain vibration velocity in inches (mm)/second use the following formula: VV = (D
where: D
2
peak-peak displacement
3
at 40° C
Inductance mH (L-L) at 25° C
Rotor Polar Moment of Inertia
Motor Weight
1
Balance
= peak-peak displacement in in. (mm)
p-p
= Vibration velocity in in. (mm)/second
V
V
rpm = motor speed
Units
lb.-in. (N-m)
kW
3
lb.-in. (N-m)
amperes
3
amperes
milliseconds
3
milliseconds
rpm
degrees C
minutes
lb.-in. (N-m)/A
volts/1000 rpm
ohms
millihenry
2
(kg-m2)
lb.-in.-s
lbs. (kg)
2
in. (mm)
x rpm) /27.01
p-p
1326AB-B3E
153.0 (17.3)
3.8/5.1
306.0 (34.6)/459.0 (51.9)
24.6
49.2/73.8
8.6
7.4
3000/4000
40.0
H
66
7.3 (0.82)
49.9
0.234
2.35
0.080 (0.009)
76 (34.5)
0.0005 (0.0127)
1326AB-C2E
210.0 (23.7)
5.2/6.9
420.0 (47.4)/569.0 (64.3)
33.2
66.4/90
5.3
13.1
3000/4000
40.0
H
71
7.44 (0.84)
50.5
0.088
1.5
0.140 (0.015)
102 (46.3)
0.0005 (0.0127)
13
Page 14
Product Data
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
È
È
È
È
È
È
È
È
È
È
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
È
È
È
È
È
È
È
È
È
È
1326AB AC Servomotor
Figure 6
1326AB-C3E and C4C Motor Performance Curves
Speed (rpm)
1326AB-C3E Motor 1326AB-C4C Motor
4000
ЗЗЗЗЗ
ÈÈÈÈ
3600
ЗЗЗЗЗ
ÈÈÈÈ
3200
ЗЗЗЗЗ
ÈÈÈÈ
2800
ЗЗЗЗЗ
ÈÈÈÈ
2400
ЗЗЗЗЗ
ÈÈÈÈ
2000
ЗЗЗЗЗ
ÈÈÈÈ
1600
ЗЗЗЗЗ
ÈÈÈÈ
1200
ЗЗЗЗЗ
ÈÈÈÈ
800
ЗЗЗЗЗ
ÈÈÈÈ
400
ЗЗЗЗЗ
ÈÈÈÈ
0
0 60 120 180 240 300 360 420 480 540
Torque (Lb.-In.)
1391B Rated
Operation
1391B Intermittent
Operation
Speed (rpm)
3000
ЗЗЗЗЗ
ÈÈÈ
2700
ЗЗЗЗЗ
ÈÈÈ
2400
ЗЗЗЗЗ
ÈÈÈ
2100
ЗЗЗЗЗ
ÈÈÈ
1800
ЗЗЗЗЗ
ÈÈÈ
1500
ЗЗЗЗЗ
ÈÈÈ
1200
ЗЗЗЗЗ
ÈÈÈ
900
ЗЗЗЗЗ
ÈÈÈ
600
ЗЗЗЗЗ
ÈÈÈ
300
ЗЗЗЗЗ
ÈÈÈ
0
0 100 200 300 400 500 600 700 800
Torque (Lb.-In.)
1391B-ES/1391-DES
Rated Operation
1391B-ES/1391-DES
Intermittent Operation
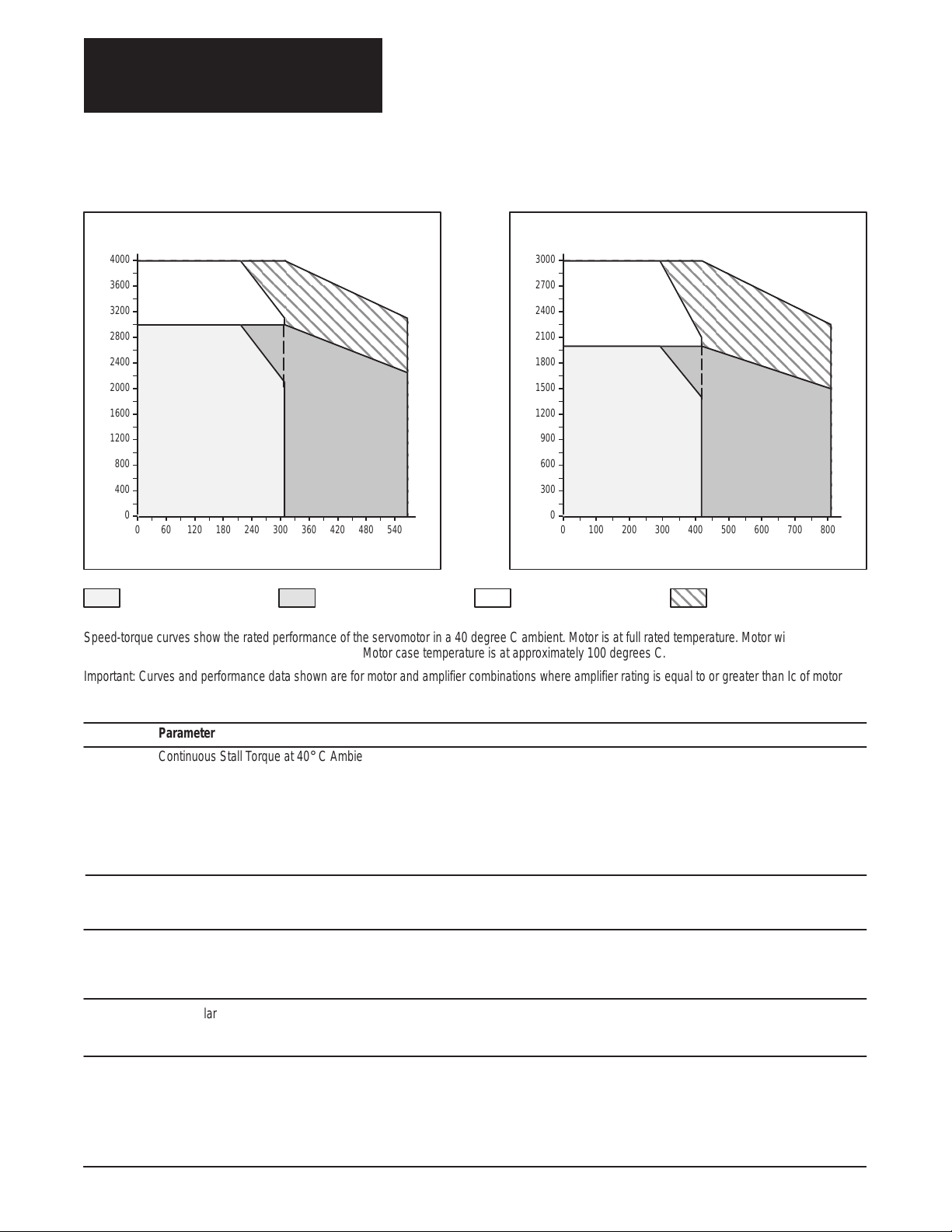
Speed-torque curves show the rated performance of the servomotor in a 40 degree C ambient. Motor is at full rated temperature. Motor windings are at
150 degrees C with a 110 degree C rise over ambient. Motor case temperature is at approximately 100 degrees C.
Important: Curves and performance data shown are for motor and amplifier combinations where amplifier rating is equal to or greater than Ic of motor
Category
General
Thermal
Parameter
Continuous Stall Torque at 40° C Ambient
Rated Output/1391B-ES, DES Rated Output
Peak Stall Torque/1391B-ES, DES Peak Stall Torque
Continuous Stall Current
Peak Stall Current/1391B-ES, DES Peak Stall Current
Mechanical Time Constant
Electrical Time Constant
Rated Speed/1391B-ES, DES Rated Speed
3
3
3
3
Maximum Ambient Temperature (without derating)
3
Insulation Class
Thermal Time Constant
Winding
Torque Constant at 25° C
Voltage Constant RMS (L-L) at 25° C
Terminal Resistance ohms (L-L) at 25° C
Inductance mH (L-L) at 25° C
Mechanical
1
T o obtain vibration velocity in inches (mm)/second use the following formula: VV = (D
where: D
2
peak-peak displacement
3
at 40° C
14
Rotor Polar Moment of Inertia
Motor Weight
1
Balance
= peak-peak displacement in in. (mm)
p-p
= Vibration velocity in in. (mm)/second
V
V
rpm = motor speed
Units
lb.-in. (N-m)
kW
lb.-in. (N-m)
amperes
3
amperes
milliseconds
milliseconds
rpm
degrees C
minutes
lb.-in. (N-m)/A
volts/1000 rpm
ohms
millihenry
lb.-in.-s
lbs. (kg)
in. (mm)
2
(kg-m2)
2
x rpm) /27.01
p-p
1326AB-C3E
310.0 (35.0)
7.5/10.0
568.0 (64.1)/568.0 (64.1)
49.1
90.0/90.0
6.0
13.0
3000/4000
40.0
H
86.0
7.44 (0.84)
50.5
0.059
1.0
0.220 (0.024)
138 (62.6)
0.0005 (0.0127)
1326AB-C4C
420.0 (47.5)
7.0/9.3
811.0 (91.7)/811.0 (91.7)
46.6
90.0/90.0
5.6
13.1
2000/3000
40.0
H
95.0
10.6 (1.20)
72.4
0.09
1.54
0.290 (0.032)
170 (77.1)
0.0005 (0.0127)
Page 15
Product Data
ЗЗЗЗЗ
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
Ç
ÈÈÈÈ
È
È
È
È
È
È
È
È
È
È
È
È
È
È
È
È
È
È
È
È
1326AB AC Servomotor
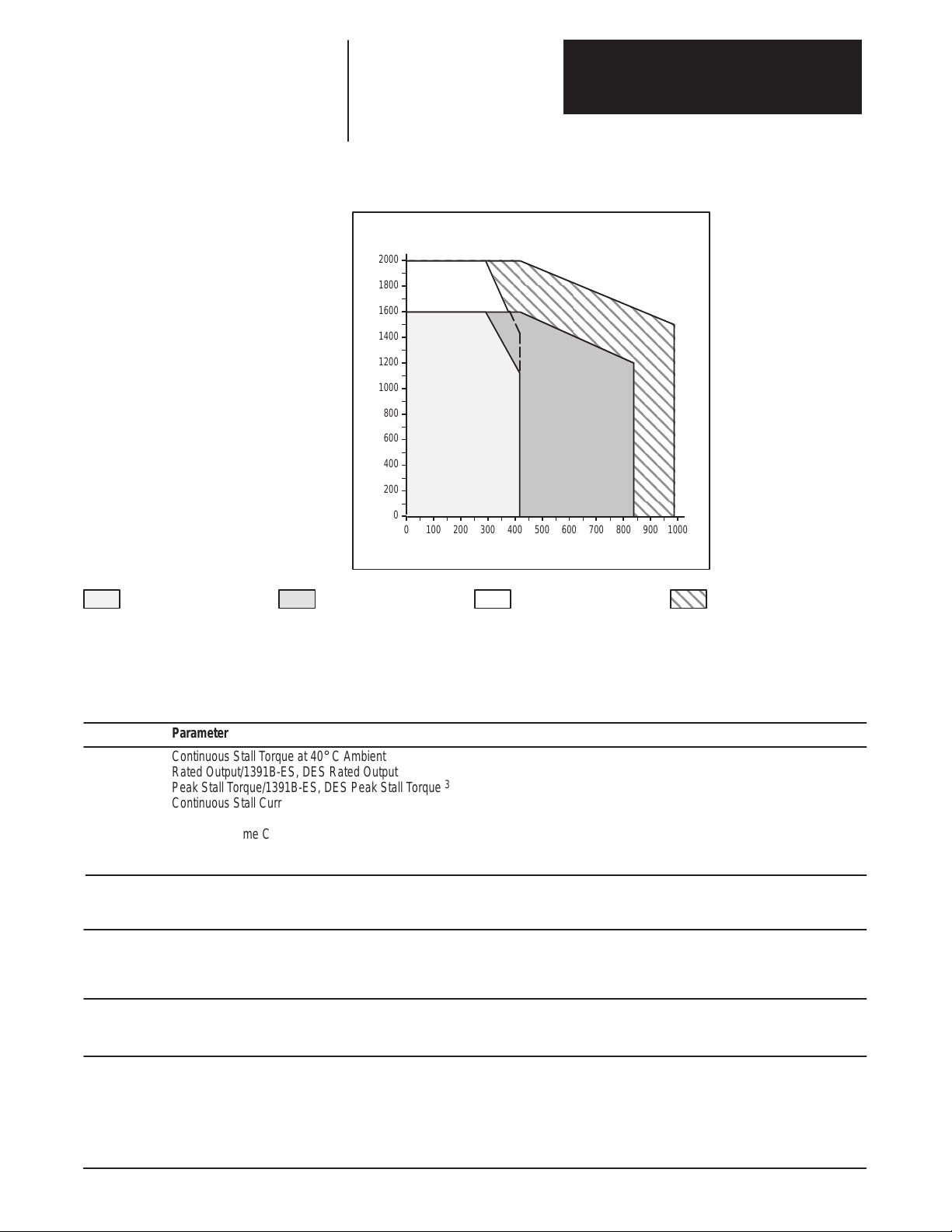
Figure 7
1326AB-C4B Motor Performance Curves
Speed (rpm)
1326AB-C4B Motor
2000
ÇÇÇ
800
600
400
200
ÈÈ
ÇÇÇ
ÈÈ
ÇÇÇ
ÈÈ
ÇÇÇ
ÈÈ
ÇÇÇ
ÈÈ
ÇÇÇ
ÈÈ
ÇÇÇ
ÈÈ
ÇÇÇ
ÈÈ
ÇÇÇ
ÈÈ
ÇÇÇ
ÈÈ
1800
1600
1400
1200
1000
0
0 100 200 300 400 500 600 700 800 900 1000
Torque (Lb.-In.)
1391B Rated
Operation
1391B Intermittent
Operation
1391B-ES/1391-DES
Rated Operation
1391B-ES/1391-DES
Intermittent Operation
Speed-torque curves show the rated performance of the servomotor in a 40 degree C ambient. Motor is at full rated temperature. Motor windings are at
150 degrees C with a 110 degree C rise over ambient. Motor case temperature is at approximately 100 degrees C.
Important: Curves and performance data shown are for motor and amplifier combinations where amplifier rating is equal to or greater than Ic of motor
Category
General
Thermal
Winding
Mechanical
1
T o obtain vibration velocity in inches (mm)/second use the following formula: VV = (D
where: D
2
peak-peak displacement
3
at 40° C
Parameter
Continuous Stall Torque at 40° C Ambient
Rated Output/1391B-ES, DES Rated Output
Peak Stall Torque/1391B-ES, DES Peak Stall Torque
Continuous Stall Current
Peak Stall Current/1391B-ES, DES Peak Stall Current
Mechanical Time Constant
Electrical Time Constant
Rated Speed/1391B-ES, DES Rated Speed
3
3
3
3
Maximum Ambient Temperature (without derating)
Insulation Class
Thermal Time Constant
Torque Constant at 25° C
Voltage Constant RMS (L-L) at 25° C
Terminal Resistance ohms (L-L) at 25° C
Inductance mH (L-L) at 25° C
Rotor Polar Moment of Inertia
Motor Weight
1
Balance
= peak-peak displacement in in. (mm)
p-p
= Vibration velocity in in. (mm)/second
V
V
rpm = motor speed
Units
lb.-in. (N-m)
3
3
kW
lb.-in. (N-m)
amperes
amperes
milliseconds
milliseconds
rpm
degrees C
1326AB-C4B
420.0 (47.5)
5.6/7.5
840.0 (94.8)/989.0 (111.8)
38.2
76.4/90
5.4
13.25
1600/2000
40.0
H
minutes
lb.-in. (N-m)/A
volts/1000 rpm
ohms
millihenry
lb.-in.-s
lbs. (kg)
in. (mm)
x rpm) /27.01
p-p
2
(kg-m2)
2
95.0
13.0 (1.47)
89.5
0.133
2.212
0.29 (0.032)
170 (77.1)
0.0005 (0.0127)
15
Page 16

Product Data
1326AB AC Servomotor
Figure 8
Motor Output Shaft Radial Load vs. Thrust Load
Radial Load (lbs.)
X=0.25 (6.4)
300
X=1.9 (48.3)
250
200
150
100
50
1326AB–Axx–xx 1326AB–Bxx–xx
100
rpm
1000
2000
4000
rpm
50 100 150 200 250 300
Thrust (lbs.)
rpm
rpm
Radial Load (lbs.)
600
500
X=0.25 (6.4)
400
X=2.28 (57.9)
300
200
100
500
1000
2000
4000
rpm
100 200 300 400 500 600
rpm
rpm
rpm
Thrust (lbs.)
Radial Load (lbs.)
900
X=0.25 (6.4)
750
X=2.8125 (71.4)
600
450
300
150
1326AB–Cxx–xx
500
rpm
1000
rpm
2000
rpm
4000
rpm
100 200 300 400 500 600
Thrust (lbs.)
1326AB AC Servomotor 15,000 Hour B10 Bearing Life
Vertical or Horizontal Mounting
R (Radial Force)
T (Axial Force)
X
16
Page 17

Product Data
N
N
1326AB AC Servomotor
Special Order Motor Information Motors having operating characteristics different from standard motors are
available as a special order item. Refer to the data listed below. For
ordering and delivery information, contact your local Allen-Bradley Sales
Office.
Table A
Non-Stocked Motor Specifications
1
otor
atalog
umber
326AB-A1E
1
Tc
lb.-in.
(N-m)
16
Ic
A
2.6
(1.8)
326AB-A2G
326AB-A3G
32
(3.6)
48
9.0
13.5
(5.4)
326AB-B1C
51
5.7
(5.8)
326AB-B1E
51
8.2
(5.8)
326AB-B2C
102
11.4
(11.5)
326AB-B3C
153
17.0
(17.3)
326AB-C1C
105
11.7
(11.9)
326AB-C1E
105
16.6
(11.9)
326AB-C2C
210
23.3
(23.7)
326AB-C3C
310
34.4
(35.0)
1
at 40° C
2
for 200% current settings
3
at 25° C
1, 2
Tp
lb.-in.
(N-m)
32
(3.6)
64
(7.2)
96
(10.8)
102
(11.5)
102
(11.5)
204
(23.1)
306
(34.6)
210
(23.7)
210
(23.7)
420
(47.5)
620
(70.1)
Ip
A
5.2
18.0
27.0
11.4
16.4
22.8
34.0
23.4
33.2
46.6
68.8
1
Rated
Speed
rpm
3000
5000
5000
2000
3000
2000
2000
2000
3000
2000
2000
Mech.
Time
Constant
10.40ms
9.10ms
8.60ms
9.80ms
9.86ms
7.90ms
8.34ms
6.40ms
6.30ms
5.40ms
5.60ms
Elec.
Time
Constant
3.4ms
3.4ms
3.4ms
7.3ms
7.4ms
7.6ms
7.7ms
12.6ms
12.6ms
13.1ms
13.4ms
Rated
Output
kW
0.3
1.3
2.0
0.8
1.3
1.7
2.5
1.7
2.6
3.5
5.0
Thermal
Time
Constant
23 min
33 min
38 min
40 min
40 min
56 min
66 min
47 min
47 min
71 min
86 min
Inertia
lb.-in.-
2
(kg-m2)
s
0.004
(0.0005)
0.007
(0.0008)
0.010
(0.001)
0.030
(0.003)
0.030
(0.003)
0.050
(0.006)
0.080
(0.009)
0.080
(0.009)
0.080
(0.009)
0.140
(0.016)
0.220
(0.024)
Kt
lb.-in./A
(N-m/A)
7.24
(0.82)
4.18
(0.47)
4.18
(0.47)
10.50
(1.19)
7.30
(0.82)
10.50
(1.19)
10.60
(1.20)
10.60
(1.20)
7.44
(0.84)
10.60
(1.20)
10.60
(1.20)
3
Ke
V/rpm
L-L
49.5
28.5
28.5
71.7
49.9
71.7
72.4
50.5
72.4
72.4
72.4
Rt
mH
L-L
5.710
0.950
0.634
1.450
0.700
0.726
0.490
0.360
0.176
0.180
0.120
L
mH
L-L
25.20
4.19
2.80
14.60
7.10
7.30
4.93
6.20
3.00
3.08
2.10
Motor Weights
(standard without options)
atalog
umber
326AB-A1E
326AB-A2G
326AB-A3G
326AB-B1C
326AB-B1E
326AB-B2C
326AB-B3C
326AB-C1C
326AB-C1E
326AB-C2C
326AB-C3C
Weight
lbs. (kg)
22 (10.0)
28 (12.7)
37 (16.8)
44 (20.0)
44 (20.0)
61 (27.7)
76 (34.5)
75 (34.0)
75 (34.0)
102 (46.3)
138 (62.6)
17
Page 18

Product Data
1326AB AC Servomotor
Servomotor Dimensions The following figures provide approximate dimensions for the 1326AB
face and flange mount motors, respectively.
Figure 9
Motor Dimensions – 1326AB-Axx Series Servomotor
C
Position
Feedback
AG
AD
AH
O
BB
AJ2
See Option
Dimension
3.625 +60.001
(92.08 +60.0254)
Sheets
①
U
AK
BF1
0.3745–0.3750
(9.51–9.53)
0.125 (3.18)
0.22 (5.59)
Plugged Inspection Holes
1/16–27 NPT
F
BF2
See option dimension
sheets for gearbox
information
Standard Inch Combination Face/Flange Mount (in inches)
Catalog Number
1326AB-A1x-11
1326AB-A2x-11
1326AB-A3x-11
Description
without brake
AD
8.69
10.94
13.19
AG
10.44
12.69
14.94
AH
2.00
2.00
2.00
1326AB-Axx-11-K4 with optional 24V DC, 72 lb.-in. brake add 2.25 inches to AD, AG and C
1326AB-Axx-11-A4 with standard 90V DC, 72 lb.-in. brake add 2.25 inches to AD, AG and C
BF1 = 0.312 - 18 tapped hole, 0.38 deep
BF2 = 0.344 dia.
AJ1 = 3.250
AJ2 = 5.0
BB = 0.125
F = 0.56
1
+0.000, –0.003
2
+0.000, –0.0005 BF1 & AJ1 are found on English units only.
AK
2.500
2.500
2.500
1
C
12.44
14.69
16.94
O
4.38
4.38
4.38
Shaft Runout 0.002 T.I.R.
①
U
0.6250
0.6250
0.6250
Shaft Endplay 0.005 T.I.R.
Pilot Eccentricity 0.004 T.I.R.
Maximum Face Runout 0.004 T.I.R.
O
45_
AJ1
Oil Seal Provision
2
Key
0.19 x 0.19 x 1.38
0.19 x 0.19 x 1.38
0.19 x 0.19 x 1.38
Metric Flange Mount (in millimeters)
Catalog Number
1326AB-A1x-21
1326AB-A2x-21
1326AB-A3x-21
Description
without brake
AD
278
335
392
AG
297
354
411
AH
40
40
40
3
1326AB-Axx-21-K4 with optional 24V DC, 8.1 N-m brake add 57 millimeters to AD, AG and C
1326AB-Axx-21-A4 with standard 90V DC, 8.1 N-m brake add 57 millimeters to AD, AG and C
BF2 = 10 +0.360/–0.000 dia.
AJ2 = 115
BB = 3.0
F = 15.0
3
+0.5, –0.5
4
+0.013, –0.009
18
AK
95
95
95
5
+0.009, –0.004
4
C
337
394
451
O
111
111
111
Shaft Runout 0.051 T.I.R.
①
Shaft Endplay 0.127 T.I.R.
Pilot Eccentricity 0.102 T.I.R.
Maximum Face Runout 0.102 T.I.R.
U
19
19
19
5
Key
6 x 6 x 30
6 x 6 x 30
6 x 6 x 30
Page 19

Position
Feedback
Product Data
1326AB AC Servomotor
Figure 10
Motor Dimensions – 1326AB-Bxx Series Servomotor
C
AG
AD
AH
BB
AJ1
AJ2
O
See Option
Dimension
5.125 +60.001
(130.18 +60.0254)
Sheets
①
U
AK
BF1
BF2
0.3745–0.3750
(9.51–9.53)
0.125 (3.18)
0.22 (5.59)
Plugged Inspection Holes
1/16–27 NPT
F
See option dimension
sheets for gearbox
information
Standard Inch Combination Face/Flange Mount (in inches)
Catalog Number
1326AB-B1x-11
1326AB-B2x-11
1326AB-B3x-11
1326AB-B4x-11
Description
without brake
AD
10.16
13.16
16.41
19.66
AG
11.78
14.78
18.03
21.28
AH
2.38
2.38
2.38
2.38
1326AB-Bxx-11-K5 with optional 24V DC, 120 lb.-in. brake add 2.25 inches to AD, AG and C
1326AB-Bxx-11-A5 with standard 90V DC, 120 lb.-in. brake add 2.25 inches to AD, AG and C
BF1 = 0.375 - 16 tapped hole, 0.38 deep
BF2 = 0.406 dia.
AJ1 = 5.875
AJ2 = 7.0
BB = 0.093
F = 0.66
1
+0.000, –0.003
2
+0.000, –0.0005 BF1 & AJ1 are found on English units only.
AK
4.50
4.50
4.50
4.50
1
C
14.16
17.16
20.41
23.66
O
5.88
5.88
5.88
5.88
Shaft Runout 0.002 T.I.R.
①
Shaft Endplay 0.005 T.I.R.
Pilot Eccentricity 0.004 T.I.R.
Maximum Face Runout 0.004 T.I.R.
45°
2
U
1.1250
1.1250
1.1250
1.1250
O
Oil Seal Provision
Key
0.25 x 0.25 x 1.50
0.25 x 0.25 x 1.50
0.25 x 0.25 x 1.50
0.25 x 0.25 x 1.50
Metric Flange Mount (in millimeters)
Catalog Number
1326AB-B1x-21
1326AB-B2x-21
1326AB-B3x-21
1326AB-B4x-21
Description
without brake
AD
257
333
416
498
AG
298
374
457
540
AH
50
50
50
50
3
1326AB-Axx-21-K5 with optional 24V DC, 13.6 N-m brake add 57 millimeters to AD, AG and C
1326AB-Axx-21-A5 with standard 90V DC, 13.6 N-m brake add 57 millimeters to AD, AG and C
BF2 = 12 +0.430/–0.000 dia.
AJ2 = 165
BB = 4.0
F = 16.0
3
+0.5, –0.5
4
+0.014, –0.011
4
AK
130
130
130
130
5
+0.009, –0.004
C
348
424
507
589
O
149
149
149
149
Shaft Runout 0.051 T.I.R.
①
Shaft Endplay 0.127 T.I.R.
Pilot Eccentricity 0.102 T.I.R.
Maximum Face Runout 0.102 T.I.R.
U
24
24
24
24
5
Key
8 x 7 x 40
8 x 7 x 40
8 x 7 x 40
8 x 7 x 40
19
Page 20

Product Data
1326AB AC Servomotor
Figure 11
Motor Dimensions – 1326AB-Cxx Series Servomotor
C
Position
Feedback
AG
AD
AH
BB
AJ1
AJ2
See Option
Dimension
6.835 +60.001
(173.61 +60.0254)
Sheets
①
U
AK
BF1
BF2
0.3745–0.3750
(9.51–9.53)
0.125 (3.18)
0.22 (5.59)
Plugged Inspection Holes
1/16–27 NPT
F
See option dimension
sheets for gearbox
information
Standard Inch Combination Face/Flange Mount (in inches)
Catalog Number
1326AB-C1x-11
1326AB-C2x-11
1326AB-C3x-11
1326AB-C4x-11
Description
without brake
AD
10.88
13.88
17.38
20.88
AG
12.44
15.44
18.94
22.44
AH
3.00
3.00
3.00
3.00
1326AB-Cxx-11-K7 with optional 24V DC, 360 lb.-in. brake add 2.5 inches to AD, AG and C
1326AB-Cxx-11-A7 with standard 90V DC, 360 lb.-in. brake add 2.5 inches to AD, AG and C
BF1 = 0.375 - 16 tapped hole, 0.69 deep
BF2 = 0.406 dia.
AJ1 = 5.875
AJ2 = 9.0
BB = 0.187
F = 0.88
1
+0.000, –0.003
2
+0.000, –0.0005 BF1 & AJ1 are found on English units only.
AK
4.50
4.50
4.50
4.50
1
C
15.44
18.44
21.94
25.44
O
7.63
7.63
7.63
7.63
Shaft Runout 0.002 T.I.R.
①
Shaft Endplay 0.005 T.I.R.
Pilot Eccentricity 0.004 T.I.R.
Maximum Face Runout 0.004 T.I.R.
45_
2
U
1.3750
1.3750
1.3750
1.3750
O
O
Oil Seal Provision
Key
0.31 x 0.31 x 2.00
0.31 x 0.31 x 2.00
0.31 x 0.31 x 2.00
0.31 x 0.31 x 2.00
Metric Flange Mount (in millimeters)
Catalog Number
1326AB-C1x-21
1326AB-C2x-21
1326AB-C3x-21
1326AB-C4x-21
Description
without brake
AD
277
353
442
531
AG
317
393
482
571
AH
60
60
60
60
3
1326AB-Cxx-21-K7 with optional 24V DC, 40.7 N-m brake add 64 millimeters to AD, AG and C
1326AB-Cxx-21-A7 with standard 90V DC, 40.7 N-m brake add 64 millimeters to AD, AG and C
BF2 = 15 +0.430/–0.000 dia.
AJ2 = 215
BB = 4.0
F = 23.0
3
+0.5, –0.5
4
+0.014, –0.011
20
4
AK
180
180
180
180
5
+0.018, +0.002
C
377
453
543
631
O
194
194
194
194
Shaft Runout 0.051 T.I.R.
①
Shaft Endplay 0.127 T.I.R.
Pilot Eccentricity 0.102 T.I.R.
Maximum Face Runout 0.102 T.I.R.
U
32
32
32
32
5
Key
10 x 8 x 50
10 x 8 x 50
10 x 8 x 50
10 x 8 x 50
Page 21

Cable
Max. Dia.
Connector
Max. Dia.
Optional
Position
Feedback
BR
CH
Product Data
1326AB AC Servomotor
Figure 12
Motor Power & Feedback Cable Dimensions
Commutation
Power
Dimensions are in inches and (millimeters)
Cable
1326-CFUxxx
1326ES-CFUxxx
1326-CFUTxxx
1326ES-CFUTxxx
1326-CPABxxx
1326ES-CPABxxx
1326-CPABTxxx
1326ES-CPABTxxx
1326-CPCxxx
1326ES-CPCxxx
1326-CPCTxxx
1326ES-CPCTxxx
1326-CEUxxx
1326-CVUxxx
1
CH is described as the clearance to bend.
2
BR (Bend Radius) is specified for standard 1326 cable assemblies. BR may vary on user fabricated cables. For standard cable, BR is a one time flex application. Flex
cables have a much higher BR to withstand flex applications.
3
All cables should be hung or laid flat for 24 hours prior to installation. This will allow the conductors to “relax” into their natural state and guard against internal twisting.
4
1326 commutation and power cables, standard and flex, are available in extended lengths of 150, 200, 250 and 300 feet (45.7, 61.0, 76.2, 91.4 meters) when using a
1391B-ES or 1391-DES drive.
Description
Commutation Feedback
4
Commutation Feedback (Extended Length)
Commutation Feedback (High Flex)
4
Commutation Feedback (Extended Length, High Flex)
Motor Power – Series A4, A5
4
Motor Power – Series A4, A5 (Extended Length)
Motor Power – Series A4, A5 (High Flex)
4
Motor Power – Series A4, A5 (Extended Length, High Flex)
Motor Power – Series A7
Motor Power – Series A7 (Extended Length)
Motor Power – Series A7 (High Flex)
Motor Power – Series A7 (Extended Length, High Flex)
Encoder Feedback
Master/Vernier
1
CH
4.0 (101.6)
4.0 (101.6)
4.0 (101.6)
4.0 (101.6)
5.0 (127.0)
5.0 (127.0)
5.0 (127.0)
5.0 (127.0)
5.0 (127.0)
5.0 (127.0)
5.0 (127.0)
5.0 (127.0)
4.0 (101.6)
4.0 (101.6)
2
BR
2.0 (50.8)
2.0 (50.8)
6.8 (172.7)
6.8 (172.7)
3.0 (76.2)
3.0 (76.2)
11.0 (279.4)
11.0 (279.4)
3.0 (76.2)
3.0 (76.2)
13.1 (332.7)
13.1 (332.7)
2.0 (50.8)
2.0 (50.8)
Connector
Max. Dia.
1.25 (31.75)
1.25 (31.75)
1.25 (31.75)
1.25 (31.75)
1.25 (31.75)
1.25 (31.75)
1.25 (31.75)
1.25 (31.75)
1.25 (31.75)
1.25 (31.75)
1.50 (38.10)
1.50 (38.10)
1.25 (31.75)
1.25 (31.75)
Cable
Max. Dia.
0.43 (10.92)
0.43 (10.92)
0.68 (17.27)
0.68 (17.27)
0.55 (13.84)
0.55 (13.84)
0.73 (18.54)
0.73 (18.54)
0.73 (18.54)
0.73 (18.54)
0.87 (22.02)
0.87 (22.02)
0.51 (12.95)
0.53 (13.46)
21
Page 22

Product Data
1326AB AC Servomotor
Servomotor Options This section provides detailed information on the various options available
for the 1326 AC Servomotor.
Integral Holding Brake (Option -Ax or -Kx)
The 1326AB servomotor contains an integral holding brake when the
catalog number contains a suffix of “-Ax” (90V DC input) or “-Kx” (24V
DC input). The brake is a disc type that is spring-set upon removal of
power. The brake is designed to hold a load at rest and provide limited
braking torque for emergency stopping. The brake is not intended as a
positioning brake (brake backlash is 0.8 arc-minutes maximum) or to be
continuously cycled to assist in stopping a load. When used as a parking
brake, the brake must not be energized/de-energized more than 90 times an
hour. A parking brake is only meant to hold a stationary load and is not
intended to stop motor movement, unless a power interruption occurs.
For further information, refer to Table B and the Bulletin 1391 Instruction
Manual.
Motor
Catalog Number
1326AB-A-11, 21
1326AB-B-11, 21
1326AB-C-11, 21
Holding
Torque
lb.-in. (N-m)
72 (8.1)
120 (13.6)
400 (45.1)
Current Draw
when Energized
-Ax (90V)
0.26A
0.37A
0.32A
-Kx (24V)
0.88A
1.20A
1.20A
Table B
Holding Brake Data
Brake Response
Time
Pickup/Dropout
120ms/20ms
150ms/25ms
120ms/30ms
Weight Adder to
Motor Weight
lbs. (kg)
3.0 (1.36)
9.0 (4.08)
13.0 (5.90)
Inertia Adder to Motor Inertia
2
(kg-cm-s2)
lb.-in.-s
0.001 (0.001)
0.0027 (0.0031)
0.0046 (0.0053)
Cold Resistance
-Ax (90V)
382 ohms
270 ohms
306 ohms
-Kx (24V)
28 ohms
21 ohms
21 ohms
Brake Power Supply for 90V DC Brakes (1326-MOD-BPS)
The Brake Power Supply converts 120V AC to the voltage needed for 90V
DC brakes.
Up to four brakes can be connected to one power supply. However, if
independent control of multiple motors is desired, one power supply per
motor must be used.
Refer to Figure 13 for dimension and wiring information.
Important: 24V DC brakes require a user supplied power supply capable
of producing 24V DC at 0.88A to 1.2A.
22
Specifications
Power Supply Input Rating: 120V AC, single-phase, +10%, –15%
Dissipation: 5 watts per motor
Page 23

Product Data
1326AB AC Servomotor
Figure 13
Brake Power Supply Dimensions and Wiring
4.2 (0.165) Dia.
Mounting Hole
28.6
(1.125)
28.6
(1.125)
6.4 (0.25) Terminal,
4 Places
120V AC
19.1
(0.75)
Suppressor
(Supplied)
+
–
Brake Wires
from
Motor Cable
Encoder Mounting Adapters (1326AB-MOD-Mxx)
Several adapters are available for mounting Allen-Bradley 845 H or T
encoders to 1326AB Servomotors. Refer to the figure below for further
information.
Important: The IP 65 rating of the motor is not maintained when using
this option.
Figure 14
Encoder Mounting Adapter
1326AB Motor
845H Mounting
Servo Clamp
Access to Coupling
Gasket
Coupling
845H
Encoder
Adapter
82.6 mm (3.25”) Maximum for All Motors
23
Page 24

Product Data
1326AB AC Servomotor
Shaft Oil Seal (1326AB-MOD-SSV-xx)
A Viton shaft oil seal is available for field installation on the motor shaft.
The seal is to be used in applications where the motor shaft may be
subjected to occasional oil splashes (motor is mounted to gearbox, etc.).
The kit is not intended to be used in applications where the motor shaft is
partially or fully submerged in oil.
Resolver Feedback Package (1326AB-MOD-Vxxxx)
Figure 15 shows the dimensions of the 1326AB Resolver Feedback
Package.
Important: The IP 65 rating of the motor is not maintained when using
this option.
Figure 15
Resolver Feedback Package Dimensions
3.2 (0.125)
(0.38)
92.0
3
(3.62)
6.4 (0.25)
1
2
3
4
5
6
9.5
2
(1.13)
5.2 (0.206) dia. hole, 3 places equally spaced on a 101.6 (4.00) dia. Bolt Circle.
+0.000/–0.0127 (+0.0000/–0.0005) tolerance.
+0.000/–0.0762 (+0.0000/–0.003) tolerance.
All mounting hardware provided in Resolver Feedback Mounting Kit.
Cannon female connector CA3102R20–29P or equivalent mounted on the package.
Cannon male mating connector CA3106F–20–295–A95 or equivalent.
Refer to the 1326AB Resolver Feedback Package Product Data for additional information.
106.2 (4.18)
1
28.6
17 Pin Connector
4.1 (0.16)
107.9
(4.25)
Dia.
18.8 (0.74)
5
24
Page 25

Product Data
1326AB AC Servomotor
Resolver Feedback Mounting Adapter Kit (1326AB-MOD-Mx)
The Resolver Feedback Mounting Kit provides a means of mounting the
1326AB Resolver to B and C series motors. An adapter is not needed for A
series motors. Refer to Figure 16 for dimension information.
Important: The IP 65 rating of the motor is not maintained when using
this option.
Figure 16
1326AB Resolver Mounting Kit Dimensions
1326AB–MOD–M22 or 1326AB–MOD–M23 Adapter for
Mounting to 1326AB–Bxx or 1326AB–Cxx Motors, Respectively
(Adaptor not required for 1326AB–Axx Motors)
1326AB–Bxx or Cxx
AC Servomotor
M22 – 5.88 (149.4)
M23 – 7.63 (193.8)
0.38 (9.7)
Motor Junction Box Kit (1326AB-MOD-RJxx)
The Motor Junction Box Kit provides axially mounted connectors. The
connector version allows the motor connectors to be brought out axially to
the motor without further wiring.
The IP65 rating of the motor is maintained when using this junction box.
Dimensions for the junction box are shown in the following figure.
25
Page 26

Product Data
1326AB AC Servomotor
Figure 17
Motor Junction Box Dimensions
C
Dimension
A
B
C
Cover and Gasket
Alternate Position
Gasket
with
Connectors
4.13 (105.0)
2.44 (62.0)
2.50 (190.5)
Blower Kits (1326AB-MOD-G3, G4)
A
B
Two blower kits are available for use with 1326AB “C” Series AC
Servomotors. The “G3” kit is designed for the “C2E” and “C4B”
servomotors. The continuous current rating of all other “C” frame motors
is too high to gain the benefit of the blower kit. The “G3” will not work on
motors with a rear mounted encoder. The “G4” kit is designed for the
“C4B” motor only. Each kit consists of an impedance protected fan (UL
recognized, CSA approved), housing, grill guard and necessary hardware.
Important: The IP 65 rating of the motor is not maintained when using
this option.
Specifications
Input Voltage 220/240V AC, 50/60 Hz., single-phase
Line Amperes 0.15 / 0.14
Locked Rotor Amperes 0.23 / 0.23
Fan Output 240 CFM
Air Inlet Clearance 6 inches (152.4 mm)
Weight 4 lbs. (1.81 kg)
The following table illustrates the operational improvements realized when
the blower kit is installed on the motors shown. Refer to Figure 18 for
dimensions.
26
Page 27

Product Data
1326AB AC Servomotor
Table C
Performance Improvements with the Blower Kit
Motor without Blower Motor with Blower
RMS Cont.
Motor Catalog
Number
1326AB-C2E
1326AB-C4B
1
at 40° C ambient.
2
Amplifier available current may limit actual torque improvement. Continuous output cannot exceed 45A.
3
Works with G3 option only.
4
Works with G3 and G4 option.
3
4
1
Torque
lb.-in. (N-m)
210 (23.7)
420 (47.5)
Continuous
Amperes
A
33.2
38.2
RMS Cont.
1
Torque
lb.-in. (N-m)
285 (32.2)
505 (57.1)
Figure 18
Blower Kit Dimensions
1326AB–MOD–G3
Continuous
Amperes
2
A
45.0
45.0
Connect to 240V AC,
Single–Phase,
50/60 Hz.
9.25
(235.0)
6.75
(171.5)
4.66 (118.4)
1326AB–MOD–G4
1326AB AC
Servomotor
Top View
1.75 (44.5)
0.875 (22.2) dia. knockout with
0.5 (12.7) provision 4 sides.
Conduit box with two 18 (457.2)
19 ga. stranded flying leads inside.
11.0
(279.0)
Blower Housing
17.5 (445.0)
27
Page 28

Product Data
1326AB AC Servomotor
Cable Wiring Information Pin-outs and interconnect information for the various 1326 cables are
provided in this section.
1326-CFUxx, 1326ES-CFUxx1, 1326-CFUTxx, 1326ES-CFUTxx
1
Commutation Cable
Connector 1391
Wire Color Gauge Pin Terminal #
Black #20 A TB1-10
White #20 B TB1-9
Shield - Drain #20 N/C TB1-8
Black #20 D TB1-7
Red #20 E TB1-6
Shield - Drain #20 N/C TB1-5
Black #20 H TB1-4
Green #20 G TB1-3
Shield - Drain #20 N/C TB1-2
Braided Shield #36 N/C TB1-1 to
Ground Stud
1326-CPABxx, 1326ES-CPABxx1, 1326-CPABTxx, 1326ES-CPABTxx
Motor Power Cable
Wire Wire Connector 1391
Number Color Gauge Pin Terminal #
1 Black 12 F TB5-1
2 Black 12 I TB5-2
3 Black 12 B TB5-3
4 Black 16 D Brake Power (+)
5 Black 16 E Thermal Switch
6 Black 16 C Brake Power (–)
7 Shield/Drain 16 G Stud Ground
8 Black 16 H Stud Ground
9 Black 16 A Thermal Switch
1
28
1326-CPCxx, 1326ES-CPCxx1, 1326-CPCTxx, 1326ES-CPCTxx1
Motor Power Cable
Wire Wire Connector 1391
Number Color Gauge Pin Terminal #
1 Black 8 D TB5-1
2 Black 8 E TB5-2
3 Black 8 F TB5-3
4 Shield/Drain 12 A Stud Ground
5 Black 12 B Stud Ground
6 Black 16 G Thermal Switch
7 Black 16 H Brake Power (+)
8 Black 16 I Brake Power (–)
9 Black 16 C Thermal Switch
1
1326ES, extended length cables need to interface with 1391 B-ES or 1391-DES drives.
Page 29

Product Data
1326AB AC Servomotor
1326-CVUxx Master/Vernier Resolver Cable
Master/ Wire Connector
Vernier Pair Color Gauge Pin Description
Master 1 White 22 A Rotor 1
Black 22 B Rotor 2
2 Red 22 D Stator 1
Black 22 F Stator 3
3 Orange 22 E Stator 2
Black 22 G Stator 4
Vernier 4 Blue 22 J Rotor 1
Black 22 K Rotor 2
5 Green 22 N Stator 2
Black 22 R Stator 4
6 Violet 22 M Stator 1
Black 22 P Stator 3
Pairs 1, 2 and 3 are used with single device format resolvers (i.e. 1:1, 1:2, 1:2.5 and 1:5).
1326-CEUxx Encoder Feedback Cable
Wire Connector
Pair Color Gauge Pin
1 Black 22 H
White 22 A
2 Black 22 F
Red 22 D
3 Black 22 J
Orange 22 C
4 Black 22 I
Blue 22 B
5 Black 22 F
Green 22 E
29
Page 30

Product Data
1326AB AC Servomotor
Servomotor Application Guide The following steps are a general guide designed to assist in servomotor
selection. Formulas provided on the following pages should be used in
conjunction with the steps below to determine correct motor sizing. For
further assistance, complete the appropriate Application Data Sheet
(pages 38-43) and contact your local Allen-Bradley Sales Office.
1. Determine the motor speed requirements.
Based on the power train configuration of your application
(leadscrew, rack and pinion, conveyor) determine the average and
peak rpm of the servomotor. Choose the velocity profile that provides
the closest approximation of your cycle.
a) Triangular Velocity Profile.
Speed
1/2 Move
Cycle
Move Cycle
Peak Motor RPM
Average Motor RPM
1/2 Move
Cycle
Peak RPM = 2 x
Average RPM
Repeat
Time
Rest
Cycle
b) Trapezoidal Velocity Profile.
Speed
1/3 Move
Cycle
1/3 Move
Cycle
Move Cycle
Peak Motor RPM
1/3 Move
Cycle
Average Motor RPM
Repeat
Rest
Cycle
Peak RPM = 1.5 x
Average RPM
Time
2. Determine the minimum continuous motor torque required.
Calculate motor torque (Tm) using the formulas on page 32, 34 or 36.
3. Determine the peak motor torque required to accelerate the load.
If the motor must accelerate within a specified time, determine the
system inertia using the formula sheets for your specific power train
configuration, otherwise go to step 5. Use the time (Time) to achieve
peak rpm, change in rpm (
∆rpm), power train inertia (System Inertia)
and load torque (Tl) in one of the two formulas that follow:
System Inertia in lb.-ft.
2
30
Peak Torque =
where:
Peak Torque = total motor torque required to accelerate the load in lb.-ft.
System Inertia = total system inertia (including motor) in lb.-ft.
Time = acceleration time (in seconds)
Tl = load torque present at the motor shaft during accel in lb.-ft.
System Inertia x
308 x Time (to accelerate)
∆rpm
+ Tl
2
∆rpm = change in motor velocity during acceleration time.
Page 31

Product Data
1326AB AC Servomotor
System Inertia in lb.-in.-s
Peak Torque =
where:
Peak Torque = total motor torque required to accelerate the load in lb.-in.
System Inertia = total system inertia in lb.-in.-s
Time = acceleration time (in seconds)
Tl = load torque present at the motor shaft during accel in lb.-in.
System Inertia x
9.6 x Time (to accelerate)
2
∆rpm
+ Tl
2
(listed as Jtjm on formula sheets)
∆rpm = change in motor velocity during acceleration time.
4. If the motors total time to accelerate/decelerate (t
of the total cycle time (t
1+t2+t3+t4
), determine the motors average
torque with the formula shown.
Duty Cycle Profile
RPM
Accelerate
(Tpa)
Total Cycle Time t
1
Steady
Speed
(Tss)
t
2
Move Cycle
Decelerate
(Tpd)
t
3
Rest
(Tr)
t
4
+ t3) exceeds 20%
1
Repeat
2
Tpa
Trms =
where:
Trms The motors RMS or average torque over the duty cycle. (Expressed in lb.-in. or
lb.-ft. The same units must be used throughout the formula.)
Tpa Motor peak torque to accelerate to maximum speed. (Expressed in lb.-in. or lb.-ft.
The same units must be used throughout the formula.)
Tss Motor torque present at the motor shaft during constant speed segment.
(Expressed in lb.-in. or lb.-ft. The same units must be used throughout the
formula.)
Tpd Motor peak torque to decelerate to zero speed. (Expressed in lb.-in. or lb.-ft. The
same units must be used throughout the formula.)
Tr Torque when motor is at zero speed (typically is Tss).
, t2, t3, t4 Time for each portion of the duty cycle in seconds.
t
1
x t1 + Tss2 x t2 + Tpd2 x t3 + Tr2 x t
t1 + t2 + t3 + t
4
4
5. To select a servomotor:
a) Select a motor with maximum speed capability of at least the peak
rpm calculated in step 1.
b) Select a motor with continuous torque capability equal to or greater
than the value determined in step 2 or 4, whichever is greater.
c) Select a motor with the capability to supply peak torque as
determined in step 3, up to the maximum speed determined in
step 1.
31
Page 32

Product Data
1326AB AC Servomotor
Servomotor Driven Leadscrew Formulas
Part/Tool
Position
Controller
Motion Control
Drive
Motor Speed
Continuous T orque at the Leadscrew
Continuous Motor Torque
T otal System Inertia
Nm =
Tb =
Tm =
Jtjm =
Position Feedback
Device
Motor
V1
x G.R.
Lead
W1 x u x Lead
6.28 x e
1
(1) (2) (3)
Tb
W1
386
x 1.1
2
(4) (6)
Lead
(
6.28
G.R. x e
Transmission
Thrust x Lead
6.28 x e
2
+ Jb
)
+ +
1
1
x
][
G.R.
Thrust x Lead x u
6.28 x e
1
+ Jgb + Jm
2
Table/Slide
Nut
+
Leadscrew
W1 x Lead
6.28 x e
(5)
θ
sine
1
Accelerating Torque
See step 3 of the Servomotor Application Guide on page 30.
Where: Notes:
e =Efficiency of leadscrew, e1 (90%
2
).
(95% typical).
2
2
).
2
).
typical) or gearbox, e
G.R. =Ratio of motor speed to leadscrew
speed.
Jb = Leadscrew inertia (lb.-in.-s
Jgb =Gearbox inertia at the motor shaft
Jm =Motor inertia (lb.-in.-s
Jtjm = Total system inertia at the motor
Lead =Movement of slide in inches per
Nm =Motor velocity (rpm).
32
2
(lb.-in.-s
).
shaft (lb.-in.-s
revolution of leadscrew.
Tb =Torque at leadscrew (lb.-in.).
Thrust =Cutting force applied by slide/load on
a workpiece (lbs).
Tl = Load torque present at the motor
shaft during accel (lb.-in.).
Tm =Load torque required at the motor
(lb.-in.).
u =Table/slide sliding coefficient of
friction (typically 0.03 to 0.2).
V1 =Linear velocity of slide/load (IPM).
W1 = Weight of slide and load (lbs.).
θ = Angle of leadscrew position
referenced from the horizontal axis
(0
°).
(1) Friction torque generated by the weight
of the table/slide and part/tool.
(2) Torque required for thrust (cutting force)
load.
(3) Friction torque generated by the thrust
(cutting force) load (approximation).
(4) Safety factor to account for torque
required to overcome seals, gib
adjustments, etc. (10% of Tm, min.).
(5) This term is for a non-counterbalanced,
non-horizontal axis.
(6) System inertia should not exceed 5
times the motor inertia.
Page 33

Product Data
1326AB AC Servomotor
Typical Leadscrew Data (Using Formulas from Previous Page)
Torque at Lead to Produce 1000 lbs. Thrust Force
1. Divide the lb.-in. value shown by efficiency of screw to obtain
corrected value.
Lead Torque
(in./rev) (lb.-in.)
0.200 31.84
0.250 39.80
0.300 47.77
Lead Torque
(in./rev) (lb.-in.)
0.333 53.02
0.500 79.61
1.000 159.23
2. For thrust other than 1000 lbs.
Torque =
Required Thrust
1000
x Torque at 1000 lbs.
Inertia of the Leadscrew
1. To determine total leadscrew inertia.
Leadscrew Inertia =
Diameter Inertia (10” length)
(inches) (lb.-in.-s
0.50 0.000048
0.75 0.00023
1.00 0.00072
1.25 0.0018
1.50 0.0038
1.75 0.0068
2. Formula to determine leadscrew inertia.
Jb = 0.000073
where:
D = Screw diameter in inches.
L = Screw length in inches.
(1)
x D4 x L
Total Leadscrew Length (in.)
10
2
)
(1)
Leadscrew is assumed to be made of steel. If it is made of
aluminum, the 0.000073 constant becomes 0.000024.
x Inertia (per 10” length)
Diameter Inertia (10” length)
(inches) (lb.-in.-s
2.00 0.0115
2.25 0.0184
2.50 0.0281
2.75 0.0412
3.00 0.0583
3.50 0.1080
2
)
Inertia of the Slide/Table Reflected to the Motor per 1000 lbs. Weight
1. For slide/table weight other than 1000 lbs.
2
)
Actual Weight
1000
Lead Reflected Inertia (per 1000 lbs.)
(in./rev) (lb.-in.-s
0.333 0.0074
0.500 0.0167
1.000 0.0666
x Reflected Inertia (1000 lbs.)
2
)
Slide/Table Inertia at Leadscrew =
Lead Reflected Inertia (per 1000 lbs.)
(in./rev) (lb.-in.-s
0.200 0.0026
0.250 0.0042
0.300 0.0060
33
Page 34

Product Data
1326AB AC Servomotor
Servomotor Driven Rack and Pinion Formulas
Position
Controller
Motion Control
Drive
Motor Speed
Continuous Torque at the Pinion
Continuous Motor Torque
Nm =
Tpin =
Tm =
Position Feedback
Device
Motor
V1
6.28 x R
G.R. x e
x G.R.
R x W1 x u
e
1
(1) (2) (3)
Tpin
x 1.1
2
Gearbox
(5)
R x Thrust
e
1
R x Thrust x u
+ +
e
1
Table/Shuttle
Rxw1
non counter balanced,
non–horizontal axis
e
1
Pinion
Sin θ
(4) (6)
T otal System Inertia
Accelerating Torque
Jtjm =
See step 3 of the Servomotor Application Guide on page 30.
W1
386
x R
2
+ Jpin
][
1
x
G.R.
+ Jgb + Jm
2
Where: Notes:
e =Efficiency of pinion to rack mesh
(95%) e
or gearbox (95%/mesh) e2.
1
G.R. =Ratio of motor speed to pinion speed.
Jgb =Gearbox inertia at the motor shaft
Jm =Motor inertia (lb.-in.-s
Jpin = Pinion inertia (lb.-in.-s
Jtjm = Total system inertia at the motor shaft
Nm =Motor velocity (rpm).
R =Pinion radius (in.).
34
(lb.-in.-s
(lb.-in.-s
2
).
2
).
2
).
2
).
Thrust =Force applied by table against
workpiece, stop, etc. (lbs).
Tl = Load torque present at the motor shaft
during accel (lb.-in.).
Tm =Continuous torque required at the
motor (lb.-in.).
Tpin =Continuous torque required at the
pinion (lb.-in.).
u =Sliding coefficient of friction of table or
shuttle support bearings (typically
0.03 to 0.2).
V1 =Linear velocity of slide/load (IPM).
W1 = Weight of table/shuttle and load (lbs.).
(1) Friction torque required to move
table/load.
(2) Motor torque required for thrust load.
(3) Friction torque generated by the thrust
load.
(4) Safety factor to account for torque
required to overcome misalignment,
mechanical adjustments, etc. (10% of Tm
minimum).
(5) Gearbox/reducer typically required
between motor and pinion.
(6) System inertia should not exceed 5 times
the motor inertia.
Page 35

Product Data
1326AB AC Servomotor
Typical Rack & Pinion System Data (Using Rack and Pinion Formulas from Previous Page)
Torque at Pinion to Produce 1000 lbs. Thrust Force
1. Divide lb.-in. value shown at pinion by gearbox ratio and efficiency to
obtain required motor torque (Tm)
2. To determine pinion torque for other thrust values, divide the thrust by
1000 and multiply by the pinion torque shown for the proper radius.
Pinion Radius1Pinion Torque
(inches) (lb.-in.)
0.5 526.3
1.0 1052.6
1.5 1578.9
1
Pinion efficiency of 95% assumed.
Pinion Radius1Pinion Torque
(inches) (lb.-in.)
2.0 2105.3
3.0 3157.9
4.0 4210.5
Torque at Pinion to Move 1000 lbs. Total Table/Slide Weight
1. Divide the lb.-in. value shown at pinion by gearbox ratio and efficiency
to obtain required motor torque (Tm)
2. To determine pinion torque for other weight values, divide the weight
by 1000 and multiply by the pinion torque shown for the proper radius.
Pinion Pinion Torque
1
Radius
(inches) u=0.03 u=0.05 u=0.1 u=0.15 u=0.2
0.5 15.8 26.3 52.6 78.9 105.3
1.0 31.6 52.6 105.2 157.9 210.5
1.5 47.4 78.9 157.8 236.7 315.9
2.0 63.2 105.2 210.4 315.6 421.2
3.0 94.7 157.9 315.6 473.4 631.8
4.0 126.3 210.4 420.8 631.2 842.4
1
Pinion efficiency of 95% assumed.
(lb.-in.)
2
2
u =Coefficient of friction.
Inertia of Table Plus Load Reflected to Pinion per 1000 lbs. Weight
1. Divide the inertia value by the square of the gearbox ratio to obtain
system inertia at the motor.
2. To determine reflected inertia for other weights, divide the weight by
1000 and multiply by the inertia shown for the appropriate radius.
Pinion Radius Reflected Load Inertia
(inches) (lb.-in.-s
0.5 0.648
1.0 2.590
1.5 5.830
2
)
Pinion Radius Reflected Load Inertia
(inches) (lb.-in.-s
2.0 10.360
3.0 23.300
4.0 41.450
2
)
3. Formula to determine pinion inertia.
Jpin = 0.000073
where:
D = Pinion diameter in inches.
Jpin = Inertia in lb.-in-s
WH = Pinion width in inches.
(1)
x D4 x WH
(1)
Pinion is assumed to be made of steel. If it is made of
2
aluminum, the 0.000073 constant becomes 0.000024.
35
Page 36

Product Data
1326AB AC Servomotor
Servomotor Driven Conveyor Formulas
Position
Controller
Motion Control
Drive
Motor Speed
Continuous T orque at Pulley/Roller 1
Continuous Motor Torque
Nm =
Tp/r =
Tm =
Position Feedback
Device
Motor
V1
6.28 x R
x G.R.
R x W1 x u
e
1
(1) (2)
Tp/r
G.R. x e
x 1.25
2
+
Gearbox
(4)
R x Wb x u
e
1
Pulley/
Roller 2
Conveyor Belt
Pulley/
Roller 3
Load
Pulley/Roller 1
(Main Drive)
IMPORTANT: Assume that all pulley radii are equal
(3) (5)
T otal System Inertia
Accelerating Torque
W1
Jtjm =
386
x R
See step 3 of the Servomotor Application Guide on page 30.
1
2
x
G.R.
Jpull
1+2+3
+
2
G.R.
+ Jgb + Jm
2
Where: Notes:
e =Efficiency of drive roller to gearbox
(95% typical) e
and gearbox
1
(95%/mesh typical) e2.
G.R. =Ratio of motor speed to pinion
speed.
Jgb =Gearbox inertia at the motor shaft
Jm =Motor inertia (lb.-in.-s
Jpull =Pulley + roller inertia, 1, 2, 3
Jtjm = Total system inertia at the motor
2
(lb.-in.-s
(lb.-in.-s
).
2
).
shaft (lb.-in.-s
2
).
2
).
Nm =Motor velocity (rpm).
36
R =Pulley/roller radius (in.).
Tl = Load torque present at the motor
shaft during accel (lb.-in.).
Tm =Continuous torque required at the
motor (lb.-in.).
Tp/r =Continuous torque required at the
main drive pulley/roller (lb.-in.).
u =Rolling coefficient of friction.
Typically 0.03 to 0.05 for ball bearing
rollers.
V1 =Linear velocity of load (IPM).
Wb = Weight of conveyor belt (lbs.).
W1 = Weight of load and belt (lbs.).
(1) Torque required to move the load at
pulley/roller 1 (lb.-in.).
(2) Torque required to move the belt at
pulley/roller 1 (lb.-in.).
(3) Safety factor to account for torque
required to overcome miscellaneous
tensions, etc.
(4) Gearbox/reducer typically required
between motor and pulley/drive roller.
(5) System inertia should not exceed 5
times the motor inertia.
Page 37

Product Data
1326AB AC Servomotor
Typical Conveyor System Data (Using Conveyor Formulas from Previous Page)
Torque at Drive Pulley/Roller 1 w/1000 lbs. Load
1. Divide lb.-in. value shown at the roller by the gearbox ratio, roller/ belt
) and gearbox (e2) efficiency to obtain required motor torque (Tm)
(e
1
2. To determine pulley/roller torque for other load values, divide the load
weight by 1000 and multiply by the pulley/roller torque shown for the
appropriate radius.
Roller Torque at Pulley 1
1
Radius
(inches) u=0.03 u=0.05 u=0.1 u=0.15 u=0.2
0.5 15.8 26.3 52.6 78.9 105.3
1.0 31.6 52.6 105.2 157.9 210.5
1.5 47.4 78.9 157.8 236.7 315.9
2.0 63.2 105.2 210.4 315.6 421.2
3.0 94.7 157.9 315.6 473.4 631.8
4.0 126.3 210.4 420.8 631.2 842.4
1
Pinion efficiency of 95% assumed.
(lb.-in.)
2
2
u =Coefficient of friction.
3. Formula used to determine torque at pulley/roller.
Torque =
R x W1 x u
e
where:
W1 = 1000 lbs.
Inertia of the Load Reflected to the Drive Pulley/Roller per 1000 lbs.
Load (does not include roller, pulley or belt inertia)
1. Divide the inertia value shown by the square of the gearbox ratio to
obtain system inertia at the motor.
2. To determine reflected inertia for other weights, divide the weight by
1000 and multiply by the inertia shown for the appropriate radius.
Roller Reflected Load
Radius Inertia
(inches) (lb.-in.)
0.5 0.648
1.0 2.590
1.5 5.830
2.0 10.360
3.0 23.300
4.0 41.450
3. Formula to determine inertia of each roller or pulley.
4
Jr = 0.0012
where:
= Pulley/roller outer diameter in inches.
D
l
D
2
L = Pulley/roller width in inches.
(1)
x [(D
÷ 16) – (D
1
= Pulley/roller inner diameter in inches.
4
÷ 16)] x L
2
(1)
Pulley/roller is assumed to be made of steel. If
it is madeof aluminum, the 0.0012 constant
becomes 0.00004.
37
Page 38

Product Data
1326AB AC Servomotor
Leadscrew Application Data for Point to Point Positioning
A. CUSTOMER
B. AXIS DESCRIPTION
C. ❏ NEW SYSTEM
❏ EXISTING EQUIPMENT
D.
1. SERVOMOTOR MANUFACTURER
❏ AC MODEL NO. /RATED CURRENT/ RATED RPM/ KW= / CONTINUOUS TORQUE/ PEAK TORQUE /SHAFT INERTIA
❏ DC
WINDING NO.
2. SERVO AMPLIFIER MANUFACTURER
❏ PWM MODEL NO.
❏ SCR OUTPUT VOLTAGE
E. MACHINE DATA
1. AXIS (HORIZONTAL/ VERTICAL) H /V
2. SLIDE /WAY MATERIAL (STEEL ON STEEL, TURCITE, ETC.)
3. SLIDING COEFFICIENT OF FRICTION (SLIDE /WAY – TYPICAL =0.03, OTHERWISE RANGE = 0.03 TO 0.2) .XX
4. TOTAL WEIGHT OF SLIDE/ LOAD LBS.
5. MAXIMUM WEIGHT OF LOAD LBS.
6. MAXIMUM SPEED IN. /MIN
7. ACCELERATION/ DECELERATION TIME TO MAXIMUM SPEED SEC.
8. MOTOR /SCREW REDUCER EFFICIENCY (TYPICAL = 0.95) .XX
9. MOTOR /SCREW GEAR RATIO ( ___ TO 1) MOTOR RPM/ SCREW RPM
10. SCREW TYPE
11. SCREW EFFICIENCY (TYPICAL= 0.90) .XX
12. SCREW LENGTH IN.
13. SCREW DIAMETER IN.
14. SCREW LEAD IN. /REV
15. APPLIED FORCE OR THRUST LBS.
16. FOR DIRECT DRIVE SYSTEMS - MOT OR T O SCREW COUPLING DIAMETER IN. LENGTH IN.
17. FOR PULLEY DRIVE SYSTEM - MOT OR MOUNTED GEAR DIAMETER IN. LENGTH IN.
18. FOR PULLEY DRIVE SYSTEM - SCREW MOUNTED GEAR DIAMETER IN. LENGTH IN.
19. MOT OR MODIFICATIONS (SEAL, SPECIAL SHAFT, ETC.)
20. SPECIFY TIME T O ACHIEVE MAXIMUM SPEED SECONDS
21. RAPID TRAVERSE SPEED IN. /MIN
22. SYSTEM INERTIA REFLECTED TO MOTOR SHAFT LB.-IN.-S
F . POSITION FEEDBACK
1. TYPE OF FEEDBACK DEVICE
2. FEEDBACK DEVICE MOUNTING
3. RESOLUTION AT FEEDBACK DEVICE
❏ RESOLVER ❏ ENCODER
❏ MOTOR ❏ SCREW
38
2
Page 39

Leadscrew Application Data for Point to Point Positioning (Continued)
G. DUTY CYCLE & TOTAL CYCLE TIME (TRIANGULAR OR TRAPEZOIDAL)
t
t
t
1
H. ENVIRONMENT (NOTE IF OILY, CORROSIVE, HIGH TEMPERATURE, ETC.)
rest
2
Product Data
1326AB AC Servomotor
t
t
t
1
3
2
t
rest
39
Page 40

Product Data
1326AB AC Servomotor
Leadscrew Application Data for Machine Tool Positioning
A. CUSTOMER
B. AXIS DESCRIPTION
C. ❏ NEW SYSTEM
❏ EXISTING EQUIPMENT
D.
1. SERVOMOTOR MANUFACTURER
❏ AC MODEL NO. /RATED CURRENT/ RATED RPM/ KW= / CONTINUOUS TORQUE/ PEAK TORQUE /SHAFT INERTIA
❏ DC
WINDING NO.
2. SERVO AMPLIFIER MANUFACTURER
❏ PWM MODEL NO.
❏ SCR OUTPUT VOLTAGE
E. MACHINE DATA
1. AXIS (HORIZONTAL/ VERTICAL) H /V
2. SLIDE /WAY MATERIAL (STEEL ON STEEL, TURCITE, ETC.)
3. SLIDING COEFFICIENT OF FRICTION (SLIDE /WAY – TYPICAL =0.03, OTHERWISE RANGE = 0.03 TO 0.2) .XX
4. TOTAL WEIGHT OF SLIDE/ LOAD LBS.
5. MAXIMUM WEIGHT OF LOAD LBS.
6. MAXIMUM SPEED IN. /MIN
7. ACCELERATION/ DECELERATION TIME TO MAXIMUM SPEED SEC.
8. MOTOR /SCREW REDUCER EFFICIENCY (TYPICAL = 0.95) .XX
9. MOTOR /SCREW GEAR RATIO ( ___ TO 1) MOTOR RPM/ SCREW RPM
10. SCREW TYPE
11. SCREW EFFICIENCY (TYPICAL= 0.90) .XX
12. SCREW LENGTH IN.
13. SCREW DIAMETER IN.
14. SCREW LEAD IN. /REV
15. APPLIED FORCE OR THRUST LBS.
16. FOR DIRECT DRIVE SYSTEMS - MOT OR T O SCREW COUPLING DIAMETER IN. LENGTH IN.
17. FOR PULLEY DRIVE SYSTEM - MOT OR MOUNTED GEAR DIAMETER IN. LENGTH IN.
18. FOR PULLEY DRIVE SYSTEM - SCREW MOUNTED GEAR DIAMETER IN. LENGTH IN.
19. MOT OR MODIFICATIONS (SEAL, SPECIAL SHAFT, ETC.)
20. SYSTEM POSITION LOOP GAIN AT CUTTING SPEED IN. /MIN / MIL
21. IF GAIN NOT SPECIFIED, SPECIFY TIME T O ACHIEVE CUTTING SPEED SECONDS
22. SYSTEM POSITION LOOP GAIN ABOVE CUTTING SPEED (0.5 X #6 TYPICAL) IN. /MIN / MIL
23. RAPID TRAVERSE SPEED IN. /MIN
24. SYSTEM INERTIA REFLECTED TO MOTOR SHAFT LB.-IN.-S
F . POSITION FEEDBACK
1. TYPE OF FEEDBACK DEVICE
2. FEEDBACK DEVICE MOUNTING
3. RESOLUTION AT FEEDBACK DEVICE
❏ RESOLVER ❏ ENCODER
❏ MOTOR ❏ SCREW
40
2
Page 41

Leadscrew Application Data for Machine Tool Positioning (Continued)
G. DUTY CYCLE & TOTAL CYCLE TIME (TRIANGULAR OR TRAPEZOIDAL)
t
t
t
1
H. ENVIRONMENT (NOTE IF OILY, CORROSIVE, HIGH TEMPERATURE, ETC.)
rest
2
Product Data
1326AB AC Servomotor
t
t
t
1
3
2
t
rest
41
Page 42

Product Data
1326AB AC Servomotor
Rack and Pinion Application Data for Point to Point Positioning
A. CUSTOMER
B. AXIS DESCRIPTION
C. ❏ NEW SYSTEM
❏ EXISTING EQUIPMENT
D.
1. SERVOMOTOR MANUFACTURER
❏ AC MODEL NO. /RATED CURRENT/ RATED RPM/ KW= / CONTINUOUS TORQUE/ PEAK TORQUE /SHAFT INERTIA
❏ DC
WINDING NO.
2. SERVO AMPLIFIER MANUFACTURER
❏ PWM MODEL NO.
❏ SCR OUTPUT VOLTAGE
E. MACHINE DATA
1. AXIS (HORIZONTAL/ VERTICAL) H /V
2. TABLE/ SLIDE SUPPORT TYPE (ROLLERS, ROLLER BEARINGS, ETC.)
3. SLIDING COEFFICIENT OF FRICTION (SLIDE /WAY – TYPICAL =0.03, OTHERWISE RANGE = 0.03 TO 0.2) .XX
4. TOTAL WEIGHT OF TABLE / LOAD LBS.
5. MAXIMUM TABLE SPEED IN. / MIN
6. ACCELERATION/ DECELERATION TIME TO MAXIMUM SPEED SEC.
7. RAPID TRAVERSE SPEED IN. / MIN
8. MOTOR PINION REDUCER EFFICIENCY (TYPICAL =0.95) .XX
9. MOTOR TO GEARBOX SPEED RATIO ( ___ TO 1) MOTOR RPM/ REDUCER RPM
10. APPLIED FORCE (THRUST) LBS.
11. PINION RADIUS IN.
12. PINION LENGTH IN.
13. PINION T O RACK EFFICIENCY (TYPICAL= 0.95) .XX
14. MOT OR TO GEARBOX COUPLING DIAMETER IN. LENGTH IN.
15. OTHER GEAR/ PULLEY DIAMETERS IN. LENGTH IN.
16. PINION MOUNTED SHEAVE /GEAR DIAMETER IN. LENGTH IN.
17. MOT OR MODIFICATIONS (SEAL, SPECIAL SHAFT, ETC.)
18. SYSTEM INERTIA REFLECTED TO MOTOR SHAFT LB.-IN.-S
F . POSITION FEEDBACK
1. TYPE OF FEEDBACK DEVICE ❏ RESOLVER ❏ ENCODER
2. FEEDBACK DEVICE MOUNTING
3. RESOLUTION AT FEEDBACK DEVICE
G. DUTY CYCLE & TOTAL CYCLE TIME
t
t
t
H. ENVIRONMENT (NOTE IF OILY, CORROSIVE, HIGH TEMPERATURE, ETC.)
1
rest
2
❏ MOTOR ❏ OTHER
t
1
t
2
rest
3
t
t
42
2
Page 43

Product Data
1326AB AC Servomotor
Conveyor Application Data
A. CUSTOMER
B. AXIS DESCRIPTION
C. ❏ NEW SYSTEM
❏ EXISTING EQUIPMENT
D.
1. SERVOMOTOR MANUFACTURER
❏ AC MODEL NO. /RATED CURRENT/ RATED RPM/ KW= / CONTINUOUS TORQUE/ PEAK TORQUE /SHAFT INERTIA
❏ DC
WINDING NO.
2. SERVO AMPLIFIER MANUFACTURER
❏ PWM MODEL NO.
❏ SCR OUTPUT VOLTAGE
E. MACHINE DATA
1. CONVEYOR LOAD SUPPORT TYPE (BEARING SUPPORTED, ROLLERS, ETC.)
2. SLIDING COEFFICIENT OF FRICTION OF SUPPORT (TYPICAL =0.03) .XX
3. TOTAL WEIGHT OF LOAD/ BELT LBS.
4. MAXIMUM SPEED IN. /MIN
5. ACCELERATION TIME TO MAXIMUM SPEED SECONDS
6. MOTOR TO DRIVE ROLL REDUCER EFFICIENCY (TYPICAL =0.95) .XX
7. GEARBOX RATIO ( ___ TO 1) MOTOR RPM/ GEARBOX RPM
8. NUMBER OF SUPPORT ROLLS
9. COUPLING BETWEEN ROLLS (CHAIN, BELT, ETC.)
10. ROLL O.D. IN.
11. ROLL I.D. IN.
12. ROLL LENGTH IN.
13. ROLL MATERIAL STEEL /ALUMINUM
14. MOT OR TO GEARBOX COUPLING DIAMETER IN. LENGTH IN.
15. OTHER GEAR/ PULLEY DIAMETERS IN. LENGTH IN.
16. MOT OR MODIFICATIONS (SEAL, SPECIAL SHAFT, ETC.)
17. SYSTEM INERTIA REFLECTED TO MOTOR SHAFT LB.-IN.-S
F . POSITION FEEDBACK
1. TYPE OF FEEDBACK DEVICE
2. FEEDBACK DEVICE MOUNTING
3. RESOLUTION AT FEEDBACK DEVICE
G. DUTY CYCLE & TOTAL CYCLE TIME
t
t
t
1
H. ENVIRONMENT (NOTE IF OILY, CORROSIVE, HIGH TEMPERATURE, ETC.)
rest
2
❏ RESOLVER ❏ ENCODER
❏ MOTOR ❏ OTHER
t
1
t
2
rest
3
t
t
2
43
Page 44

Product Data
1326AB AC Servomotor
Conversion Factors Abbreviations used in this publication are in ( ).
Torque
To Convert To Multiply By
lb.-in. Newton-meters (N-m) 0.113
lb.-ft. Newton-meters (N-m) 1.3558
Newton-meters (N-m) lb.-in. 8.85
Newton-meters (N-m) lb.-ft. 0.7376
lb.-in. kg-cm 1.155
lb.-in. lb.-ft. 0.0833
lb.-ft. lb.-in. 12
oz.-in. lb.-in. 0.0625
Joules (J) lb.-in. 8.85
Temperature
To Convert To Use the Formula
degrees F (°F) degrees C (°C) (degrees F – 32) / 1.8
degrees C (°C) degrees F (°F) (degrees C x 1.8) + 32
44
Rotation / Rate
To Convert To Multiply By
rpm degrees/second (d/s) 6.00
rpm radians/second (rad/s) 0.1047
degrees / second (d / s) rpm 0.1667
radians / second (rad / s) rpm 9.549
feet / minute (fpm) meters / second (m / s) 0.00508
feet / second (fps) meters / second (m / s) 0.3048
inches / second (in. / s) meters / second (m / s) 0.0254
kmph meters / second (m / s) 0.2778
rpm radians/second (rad/s) 0.1047
revolutions radians (rad) 6.283
radians (rad) degrees 57.3
degrees seconds (s) 3600
degrees minutes (min) 60
Moment Of Inertia
To Convert To Multiply By
2
N-m
oz.-in.
2
lb.-in.
2
lb.-in.
2
lb.-ft.
Slug-in.
Slug-ft
oz.-in.-s
oz.-in.-s
lb.-in.-s
lb.-in.-s
lb.-in.-s
2
kg-m
2
kg-m
2
kg-m
kg-cm
2
2
2
2
2
2
2
2
2
2
lb.-ft.
2
lb.-ft.
2
lb.-ft.
lb.-in.-s
lb.-in.-s
lb.-in.-s
2
lb.-ft.
2
lb.-ft.
kg-cm
2
lb.-ft.
kg-cm-s
2
kg-m
kg-cm-s
2
lb.-ft.
lb.-in.-s
lb.-in.-s
2.42
0.000434
0.00694
2
2
2
0.00259
0.373
0.0847
32.17
0.1675
2
73.53
2.68
2
1.155
0.113
2
10.20
23.73
2
2
8.85
0.000885
Page 45

Product Data
1326AB AC Servomotor
Mass / Weight
To Convert To Multiply By
ounces (oz.) grams 31.1
pounds (lbs.) kilograms (kg) 0.4536
pounds (lbs.) ounces (oz.) 16
kilograms (kg) pounds (lbs.) 2.205
Newtons pounds (lbs.) 0.2248
Slugs Pounds (lbs.) 32.7
Length
To Convert To Multiply By
meters (m) inches (in.) 39.37
meters (m) feet (ft.) 3.281
meters (m) yards (yd) 1.094
meters (m) millimeters (mm) 1000
meters (m) centimeters (cm) 100
millimeters (mm) inches (in.) 0.0394
millimeters (mm) centimeters (cm) 0.10
micrometers (
inches (in.) meters (m) 0.0254
inches (in.) millimeters (mm) 25.4
inches (in.) centimeters (cm) 2.54
feet (ft.) meters (m) 0.3048
yards (yd) meters (m) 0.914
µm) inches (in.) 0.00003937
Power
To Convert To Multiply By
watts (W) horsepower (hp) 0.00134
lb.-ft. / min horsepower (hp) 0.0000303
horsepower (hp) watts (W) 746
Acceleration
To Convert To Multiply By
in. / s
in. / s
ft / s
ft / s
ft / s
rad / s
2
2
2
2
2
2
2
m/s
0.0254
g 386.4
2
m/s
in. / s
2
0.3048
12
g 32.2
Degrees / s
2
57.3
Area
To Convert To Multiply By
2
in.
2
ft
2
in.
3
in.
2
ft
2
m
2
m
3
ft
0.00694
0.0929
0.000645
0000579
45
Page 46

Product Data
1326AB AC Servomotor
46
Page 47

Product Data
1326AB AC Servomotor
47
Page 48

Publication 1326A-2.3 November, 1996
Supersedes September, 1994 Copyright 1994 Allen-Bradley Company, Inc., a Rockwell International company Printed in USA
 Loading...
Loading...