

查询ATS635LSE供应商
ATS635LSE and ATS636LSE
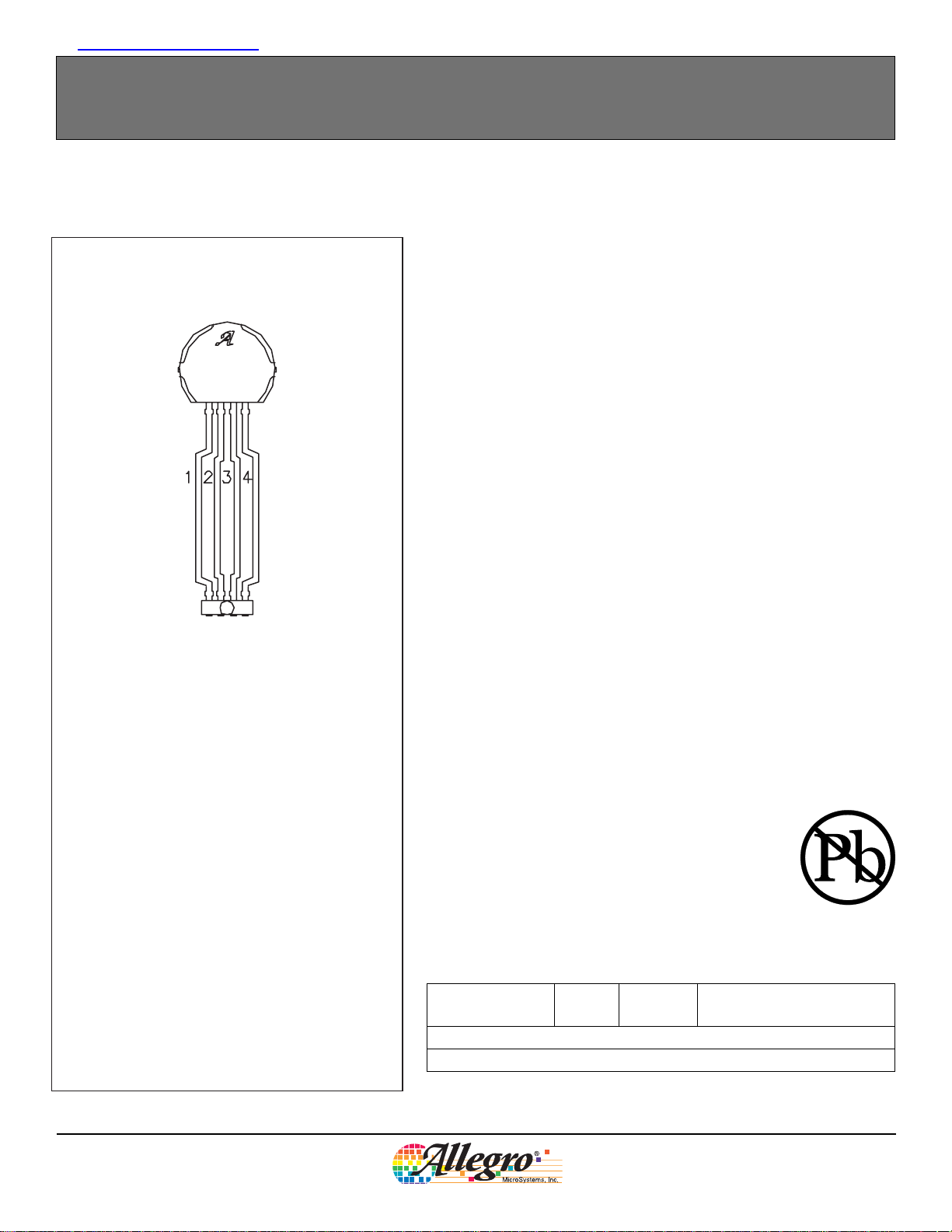
PACKAGE DIAGRAM
Pin 1 = VCC
Pin2=VOUT
Pin3=NoConnect
Pin 4 = GND
ABSOLUTE MAXIMUM RATINGS
Supply Voltage, VCC………………….…….. 28 V*
Reverse Supply Voltage, V
Overvoltage Supply Current, I
Output Off Voltage, V
Output Sink Current, I
OUT……
OUT
Magnetic Flux Density, B…………… Unlimited
Package Power Dissipation, P
Operating Temperature Range, T
Suffix “L”………...……….. -40°Cto+150°C
Junction Temperature, T
Storage Temperature Range
………………………… -65°Cto+170°C
T
S
…………… -18 V
RCC
…..……100 mA
CC
……………… 26.5V
…...…………. 20 mA
….. See Graph
D
A
……..…………..165 °C
J
†
Programmable Back Biased Hall-Effect
Switch with TPOS Functionality
The ATS635LSE and ATS636LSE programmable, true power-on state
(TPOS), sensors are an optimized Hall-effect IC and magnet combination
that switch in response to magnetic signals created by ferrous targets in
gear-tooth sensing and proximity applications.
The devices are externally programmable. A wide range of
programmability is available on the magnetic operate point (B
hysteresis remains fixed. This advanced feature allows for optimization of
the sensor switch point and can drastically reduce the effects of
mechanical placement tolerances found in production environments .
A proprietary dynamic offset cancellation technique, with an internal
high-frequency clock, reduces the residual offset voltage, which is normally
caused by device overmolding, temperature dependencies, and thermal
stress. Having the Hall element and amplifier in a single chip minimizes
many problems normally associated with low-level analog signals.
This sensor system is ideal for use in gathering speed or position
information using gear-tooth-based configurations, or for proximity sensing
with ferrous targets.
The ATS635LSE switches HIGH in the presence of a ferrous target or
tooth and switches LOW in the presence of a target valley, window, or
when the ferrous target is removed. The ATS636LSE has the opposite
polarity and switches LOW in the presence of a ferrous target or tooth and
switches HIGH in the presence of a target valley, window, or when the
ferrous target is removed.
These devices are available in lead (Pb) free versions, with 100%
matte tin leadframe plating.
FEATURES
Chopper Stabilization
Extremely low switch-point drift over temperature
On-chip Protection
Supply transient protection
Output short-circuit protection
Reverse-battery protection
True Zero-Speed Operation
True Power-On State
Single-chip Sensing IC for High Reliability
Optimized Magnetic Circuit
Wide Operating Voltage Range
Internal Regulator
Use the following complete part numbers when ordering:
) while the
OP
*Fault conditions that produce supply voltage transients will
be clamped by an internal Zener diode. These conditions
can be tolerated but should be avoided.
†
Internal current limiting is intended to protect the device
from output short circuits, but is not intended for continuous
operation.
ATS635LSE-DS
Part Number Pb-Free Output
Packing*
(Tooth)
ATS635LSETN-T Yes High 13-in. reel, 450 pieces/reel
ATS636LSETN-T Yes Low 13-in. reel, 450 pieces/reel
*Contact Allegro for additional packing options.
Allegro MicroSystems, Inc.
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000
www.allegromicro.com
ATS635LSE and ATS636LSE
PROGRAMMABLE TRUE POWER-ON HALL-EFFECT GEAR-TOOTH SWITCHES
CHARACTERISTICS
ELECTRICAL CHARACTERISTICS over operating voltage and junction temperature range
(unless otherwise noted)
Characteristics Symbol Test Conditions
Limits
Min. Typ. Max. Units
Supply Voltage1 VCC Operating 4.2 – 24 V
After programming
Power-Up State POS
V
= 0 à V
CC
B < BOP ATS636
CC(min)
, t > t
:
ON
HIGH HIGH HIGH –
B < BOP ATS635 LOW LOW LOW –
Low Output Voltage V
Output Current Limit2 I
Output Leakage Current I
OUT(SAT)
Output on, I
OUTM
Output off, V
OFF
Pulse test method
= 20 mA – 175 400 mV
OUT
Output on
OUT
30 50 90 mA
= 24 V – – 10 µA
Output off (HIGH) – 2.5 5.5 mA
Supply Current I
CC
Output on (LOW) – 2.5 5.5 mA
Reverse Supply Current I
Power-On Delay3 tON Output off; VCC > V
V
RCC
= -18V – – -5 mA
RCC
– 35 50 µs
CC(min)
Output Rise Time tr RL = 820 Ω, CL = 10 pF – 1.2 5 µs
Output Fall Time tf RL = 820 Ω, CL = 10 pF – 1.2 5 µs
Sampling Frequency f
Supply Zener Voltage V
Output Zener Voltage V
Supply Zener Current4 I
Output Zener Current I
- – 250 - kHz
Sample
Zsupply
ZOutput
VS = 28 V – –
Zsupply
VO = 30 V – –
ZOutput
ICC = I
I
+ 3 mA
CC(max)
TA = 25°C
= 3 mA
OUT
TA = 25°C
28 – – V
30 – – V
8.5 mA
3
mA
Note: Typical data is at VCC = 12 V and TA = +25°C.
1
Do not exceed the maximum thermal junction temperature: see power de-rating curve.
2
Short circuit protection is not intended for continuous operation and is tested using pulses.
3
The power on delay is the time that is necessary before the output signal is valid
4
The maximum spec limit for this parameter is equivalent to I
CC(max)
+ 3 mA
Page 2 of 15
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000
Copyright © 2005 Allegro MicroSystems, Inc.
ATS635LSE and ATS636LSE
PROGRAMMABLE TRUE POWER-ON HALL-EFFECT GEAR-TOOTH SWITCHES
MAGNETIC CHARACTERISTICS over operating voltage and junction temperature range using
reference target (Unless otherwise noted)
Limits
Characteristics Symbol Test Conditions
Switch Point – 7 – Bit
Number of Programming
Bits
-
Switch Point Polarity – 1 – Bit
Programming Lock – 1 – Bit
Gear Tooth Sensor / Proximity Sensing Characteristi cs (Low Switchpoint Only)
1
Programming Air Gap
Range
Programming Resolution
2
Air Gap Drift Over Full
Temperature Range
AG
AG
AG
Range
Res
Drift
Temp: 25°C Code –127
Temp: 25°C Code +127
Temperature: 25°C
Program Air Gap = 2.5 mm
Device Programmed
to 2.5 mm
Over Tooth (ATS635LSE) – HIGH – –
Over Valley (ATS635LSE) – LOW – –
Polarity P
Over Tooth (ATS636LSE) – LOW – –
Over Valley (ATS636LSE) – HIGH – –
1400
1200
1000
800
600
400
Flux Density (Gauss)
200
0
0 30 60 90 120 150 180 210 240 270 300 330 360
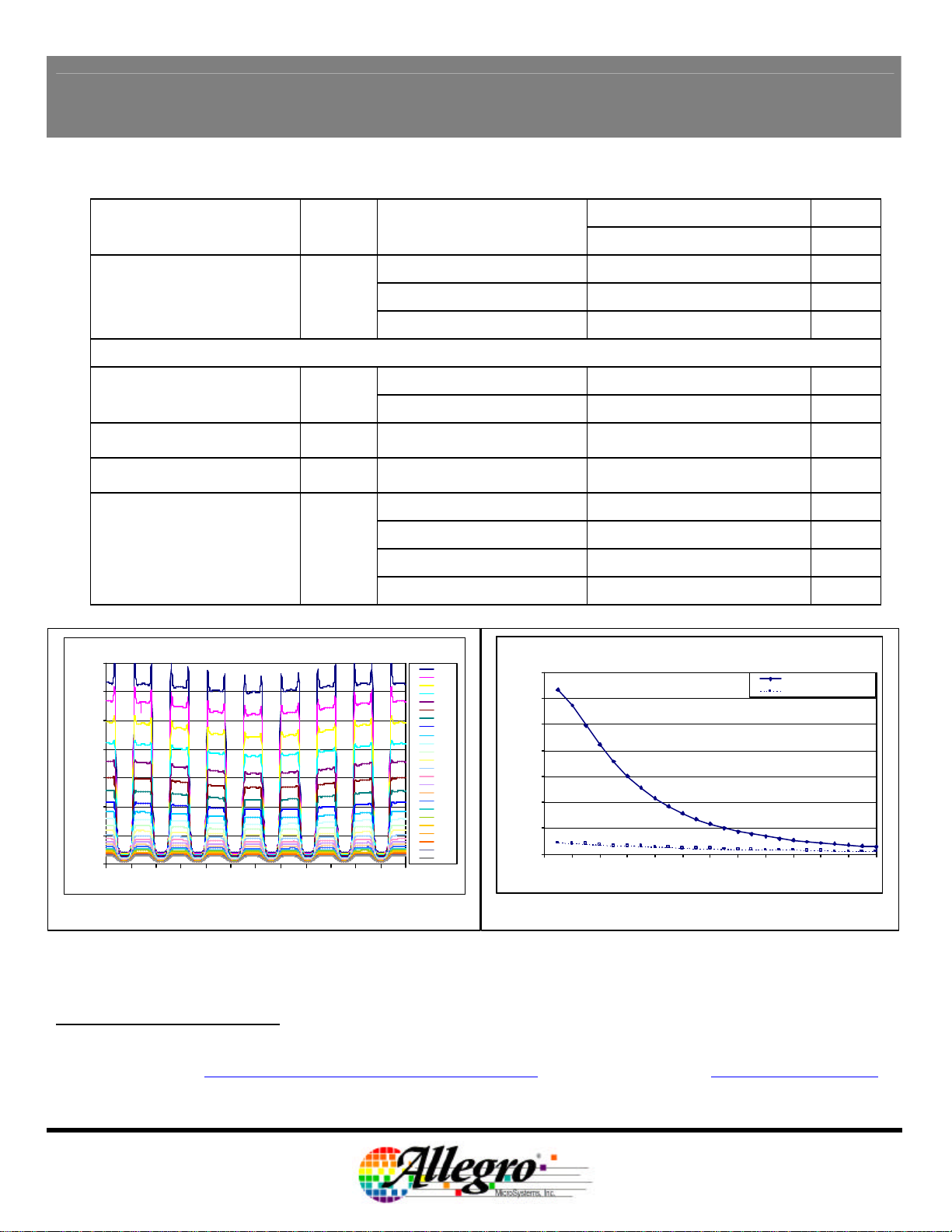
Reference Target Flux Density vs. Position: Typical
Reference Target Flux Density vs. Position
Position (º)
0.25
0.50
0.75
1.00
1.25
1.50
1.75
2.00
2.25
2.50
2.75
3.00
3.25
3.50
3.75
4.00
4.25
4.50
4.75
5.00
5.25
5.50
5.75
6.00
1400
1200
1000
800
600
400
Flux Density [Gauss]
200
0
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 5.5 6.0
Reference Target Tooth and Valley Field vs. Air Gap
Min. Typ. Max. Units
2.5 – – mm
– – 1.5 mm
– 0.05 – mm
– 0.2 – mm
Tooth and Valley Field vs. Air Gap
Reference Target
Reference Target Tooth
Reference Target Valley
Air Gap [mm]
1
The switch point will vary over temperature. A sufficient margin obtained through customer testing is required to guarantee functionality over
temperature. Programming at larger air gaps leaves no safety margin for switchpoint drift. See the applications note: “Proximity Sensing
Programming Technique” http://www.allegromicro.com/techpub2/proximity_sensing/ or visit the Allegro website at http://www.allegromicro.com
for additional information.
2
The switch point will vary over temperature, proportionally to the programmed air gap. This parameter is based on characterization data and is not
a tested parameter in production. Switch point air gap generally drifts downward as temperature increases.
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000
Copyright © 2005 Allegro MicroSystems, Inc.
ATS635LSE and ATS636LSE
PROGRAMMABLE TRUE POWER-ON HALL-EFFECT GEAR-TOOTH SWITCHES
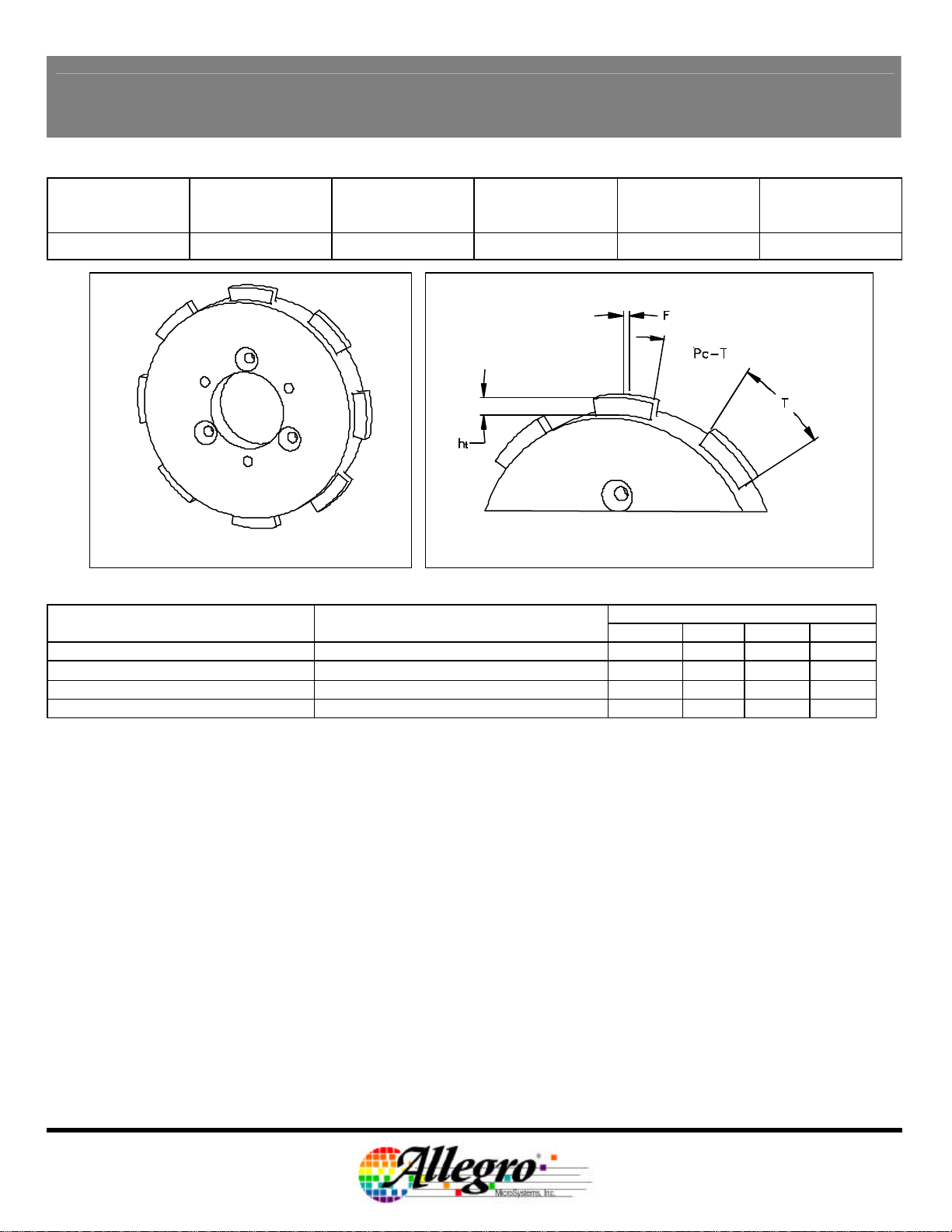
REFERENCE TARGET DIMENSIONS
Outside
Target
Reference Target 120mm 6mm 23.5mm 23.5mm 5mm
Diameter
(Do)
Face Width
(F)
Reference Target
Reference Target
GEAR PARAMETERS FOR CORRECT OPERATION
Characteristic Description
Tooth Whole Depth (ht) Depth of Target Valley 5 – – mm
Circular Valley Length (PC – T) Length of Target Valley 13 – – mm
Circular Tooth Length (T) Length of Target Tooth 5 – – mm
Face Width (F) Thickness or Width of Target Tooth 5 – – mm
MATERIAL: CRS 1018
Circular Tooth
Length
(T)
Circular Valley
Length
(PC – T)
Limits
Min. Typ. Max. Units
Tooth Whole
Depth
(ht)
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000
Copyright © 2005 Allegro MicroSystems, Inc.
ATS635LSE and ATS636LSE
PROGRAMMABLE TRUE POWER-ON HALL-EFFECT GEAR-TOOTH SWITCHES
ELECTROMAGNETC CAPABILITY (EMC) PERFORMANCE
Please contact Allegro MicroSystems for EMC performance
Test Name Reference Specification
ESD – Human Body Model AEC-Q100-002
ESD – Machine Model AEC-Q100-003
Conducted Transients ISO 7637-1
Direct RF Injection ISO 11452-7
Bulk Current Injection ISO 11452-4
TEM Cell ISO 11452-3
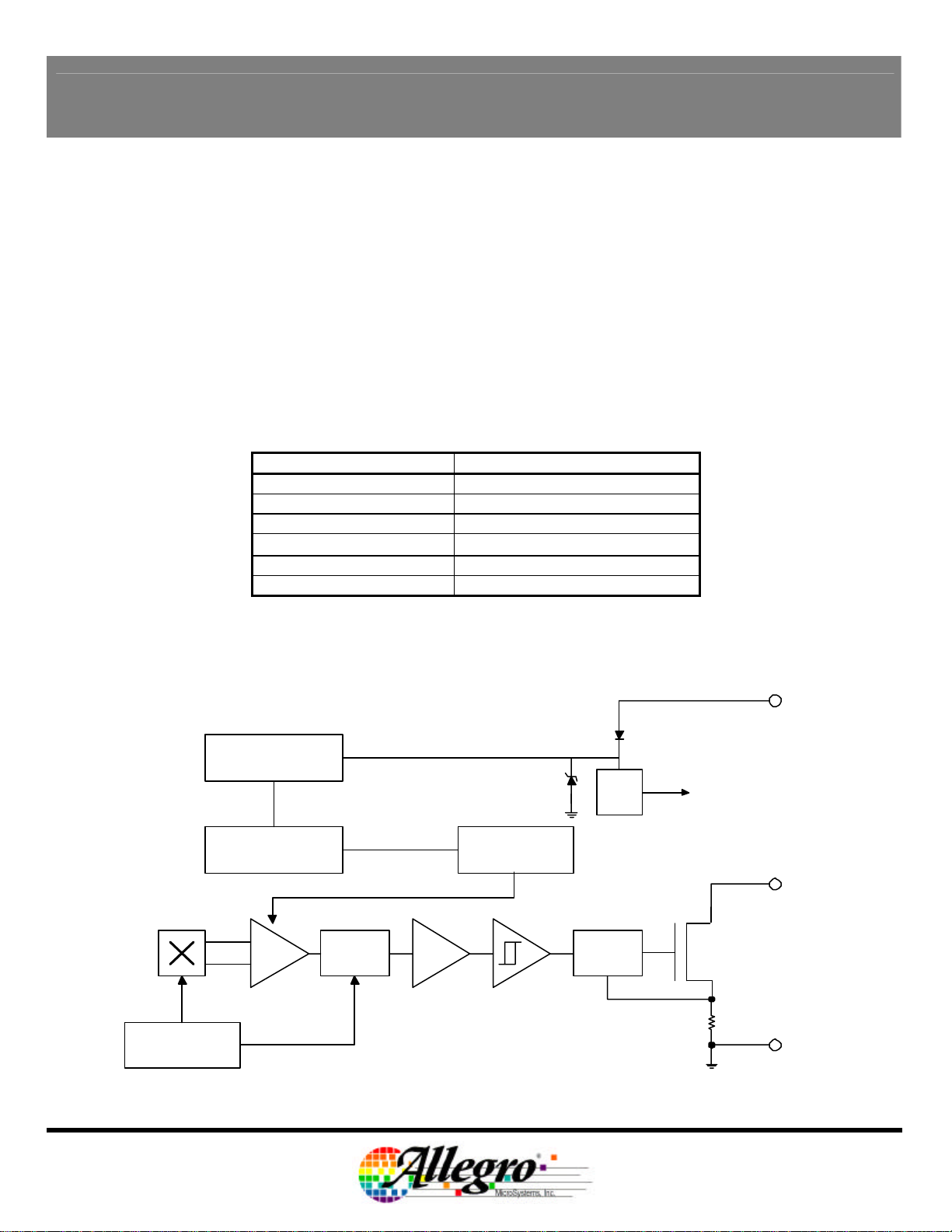
Clock/Logic
FUNCTIONAL BLOCK DIAGRAM
Program / Lock
Programmming
Logic
AMP S/H LPF
Offset Adjust
Reg
Current
Limit
VCC
To all
subcircuits
OUT
GND
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000
Copyright © 2005 Allegro MicroSystems, Inc.

ATS635LSE and ATS636LSE
PROGRAMMABLE TRUE POWER-ON HALL-EFFECT GEAR-TOOTH SWITCHES
FUNCTIONAL DESCRIPTION
Chopper-Stabilized Technique . The basic Hall sensor
is a small sheet of semiconductor material in which a
constant bias current will flow when a constant voltage
source is applied. The output will take the form of a
voltage measured across the width of the sheet and will
have negligible value in the absence of a magnetic field.
When a magnetic field with flux lines at right angles to
the Hall current is applied, a small signal voltage directly
proportional to the strength of the magnetic field will
occur at the output terminals.
This signal voltage is proportionally small relative to the
offset produced at the input of the chip. This makes it
very difficult to process the signal and maintain an
accurate, reliable output over the specified temperature
and voltage range. Therefore, it is important to reduce
any offset on the signal that could be amplified when the
signal is processed.
Chopper Stabilization is a unique approach used to
minimize input offset on the chip. This technique
removes a key source of output drift with temperature
and stress, and produces a 3X reduction in offset over
other conventional methods.
This offset reduction Chopping Technique is based on a
signal modulation-demodulation process. The undesired
offset signal is separated from the magnetically induced
Regulator
Hall Element
Figure 1 – Concept of Chopper -Stabilization Algorithm
signal in the frequency domain. The offset (and any low
frequency noise) component of the signal can be seen
as signal corruption added after the signal modulation
process has taken place. Therefore, the DC offset is not
modulated and remains a low frequency component.
Consequently, the signal demodulation process acts as
a modulation process for the offset causing the
magnetically induced signal to recover its original
spectrum at baseband while the DC offset becomes a
high frequency signal. Then, using a low pass filter the
signal passes while the modulated DC offset is
suppressed.
The advantage of this approach is significant offset
reduction, which de-sensitizes the chip against the
effects of temperature and stress. The disadvantage is
that this technique features a demodulator that uses a
sample and hold block to store and recover the signal.
This sampling process can slightly degrade the Signalto-Noise Ratio (SNR) by producing replicas of the noise
spectrum at the baseband. The degradation is a
function of the ratio between the white noise spectrum
and the sampling frequency. The effect of the
degradation of the SNR is higher jitter, a.k.a. signal
repeatability. In comparison to a continuous time device,
the jitter spec can be increased by a factor of five.
Amplifier
CLOCK
Sample/
Hold
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000
Copyright © 2005 Allegro MicroSystems, Inc.

ATS635LSE and ATS636LSE
PROGRAMMABLE TRUE POWER-ON HALL-EFFECT GEAR-TOOTH SWITCHES
FUNCTION DESCRIPTION: ADDRESSING / PROGRAMMING PROTOCOL
The ATS635LSE and ATS636LSE magnetic operate point (BOP) is programmed by serially addressing the devices
through the supply terminal (1). After the correct operate point is determined, the device programming bits are selected
and blown, then a lock bit is selected and blown to prevent any further (accidental) programming.
Addressing: Bop is programmable in both the positive and negative direction from its initial value. Addressing is used to
determine the desired code, while programming is used to lock the code. A unique key is needed to blow fuses, while
addressing as described below does not allow for the device to be programmed accidentally.
Addressing with positive polarity. The magnetic operate point (B
Addresses are sequentially selected (Figure 2) until the required operate point is reached. The first address must be
selected with a High voltage pulse (VPP), while the remaining pulses should be V
between BOP and the magnetic release point (BRP), the Hysteresis (B
) is adjustable using 7 bits or 128 addresses. The
OP
Pulses. Note that the difference
PH
), is fixed for all addresses.
HYS
V
PP
Code 2
Code 3
V
PH
V
PL
t
d(1)
t
d(0)
Code N-2
0
Code N
Code N-1
(Up to 127)
Figure 2 – Addressing Pulses: Positive Polarity
Code 1
Addressing with negative polarity. The magnetic operate point (B
128 addresses. To invert the polarity it is necessary to first apply a keying sequence (Figure 3). Th e polarity key contains
a VPP pulse and at least 1 VPH pulse, but no more than 6 VPH pulses; the key in Figure 3 shows 2 VPH pulses. The
addresses are then sequentially selected until the required operate point is reached. The first address must be selected
with a High voltage pulse (VPP), while the remaining pulses should be V
Key
Polarity
V
PP
V
PH
V
PL
0
Code -1
Code -2
t
d(1)
Code -3
Figure 3 – Addressing Pulses: Negative Polarity
) is adjustable with negative polarity using 7 bits or
OP
Pulses.
PH
Code -N
Code -(N-2)
Code -(N-1)
(Up to -127)
t
d(0)
Page 7 of 15
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000
Copyright © 2005 Allegro MicroSystems, Inc.

ATS635LSE and ATS636LSE
PROGRAMMABLE TRUE POWER-ON HALL-EFFECT GEAR-TOOTH SWITCHES
Program Enable. To program the device, a keying sequence is used to activate / enable the programming mode as
shown in Figure 4. This program key sequence consisting of a VPP pulse, at least seven VPH pulses, and a VPP pulse with
no supply interruptions. The sequence is designed to prevent the device from being programmed accidentally (e.g., as a
result of noise on the supply line).
t
PROGRAM ENABLE
7 or More Pulses
(8 Pulses Shown)
d(1)
t
d(0)
V
PP
V
PH
V
PL
t
d(1)
0
Figure 4 – Program Enable Pulse Sequence
Code Programming. After the desired switch point code is selected (0 through 127), each bit of the corresponding binary
address should be programmed individually, not at the same time. For example, to program code 5 (binary 000101), bits
1 and 3 need to be programmed. A bit is programmed by addressing the code and then applying a VPP pulse, the
programming is not reversible. An appropriate sequence for blowing code 5 is shown in Figure 5.
V
PP
V
PH
V
PL
0
t
d(1)
Program Enable
t
d(1)
Bit 3 Address
000100
Code 4
t
d(0)
t
dP
Bit 3 Program
Program Enable
000001
Code 1
Bit 1 Program
Bit 1 Address
Figure 5 – Code Programming Example
Polarity Bit Programming. If the desired switchpoint has negative polarity, the polarity bit must be programmed. To do
this it is necessary to first apply the polarity key sequence before the program key sequence (Figure 6). Finally a VPP
pulse of duration tdP must be applied to program this bit, the programming is not reversible. The polarity bit is for adjusting
programming range only and will not affect the output polarity. The proper output polarity device is determined by
ordering the correct part number (ATS635 or ATS636), as they are different ICs.
Key
Polarity
V
PP
Program
Polarity Bit
Program Enable
V
PH
V
PL
t
0
d(1)
Figure 6 – Polarity Bit Programming
Page 8 of 15
t
d(1)
t
d(0)
t
dP
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000
Copyright © 2005 Allegro MicroSystems, Inc.

ATS635LSE and ATS636LSE
PROGRAMMABLE TRUE POWER-ON HALL-EFFECT GEAR-TOOTH SWITCHES
Lock-Bit Programming. After the desired code is programmed, the lock bit (code 128), can be programmed (figure 7) to
prevent further programming of the device. Again; programming is not reversible.
V
PP
Program Enable
V
PH
V
PL
t
0
d(1)
t
d(1)
t
d(0)
Figure 7 – Lock -Bit Programming Pulse Sequence
See Allegro website at http://www.allegromicro.com for extensive information on device programming as well as
programming products. Programming hardware is available for purchase and programming software is available for free.
Valid over operating temperature range unless otherwise noted.
Lock Bit
Address
128 Pulses
t
dP
Lock Bit
Program
Part Number Characteristics Symbol Test Conditions
PROGRAMMING PROTOCOL (TA = +25°C)
Minimum voltage range
during programming
5,6
Programming Voltage
VPL
VPH 8.5 – 15 V
VPP 25 – 27 V
Maximum supply current
during programming
OFF time between bits 20 – – µs
Enable, address, program,
or lock bit ON time
ATS635 /
ATS636
Programming Current IPP
t
d(0)
t
d(1)
tdP Program pulse ON time 100 300 – µs
Pulse Rise Time tr VPL to VPH or VPP – – 11 µs
Pulse Fall Time tf VPH or VPP to VPL – – 5 µs
Limits
Min. Typ. Max. Units
4.5 5 5.5 V
– 500 – mA
20 – – µs Pulsewidth
5
Programming Voltages are measured at Pin 1 (VCC) of SIP. A minimum capacitance of 0.1 µF must be connected from VCC to GND
of the SIP to provide the current necessary to blow the fuse.
6
Testing is the only method that guarantees successful programming.
Page 9 of 15
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000
Copyright © 2005 Allegro MicroSystems, Inc.

ATS635LSE and ATS636LSE
PROGRAMMABLE TRUE POWER-ON HALL-EFFECT GEAR-TOOTH SWITCHES
FUNCTIONAL DESCRIPTION (CONT.): TYPICAL APPLICATION CIRCUIT
Applications. It is strongly recommended that an external ceramic bypass capacitor in the range of 0.01 µF to 0.1 µF be
connected between the supply and ground of the device to reduce both external noise and noise generated by the
chopper-stabilization technique. (The diagram below shows a 0.1 µF bypass capacitor.)
The series resistor RS in combination with the bypass capacitor creates a filter for EMC pulses. The series resistor will
have a drop of approximately 800 mV, this must be considered for the minimum VCC requirement of the ATS635LSE /
ATS636LSE. The small capacitor on the output of the device improves the EMC performance of the device.
The pull-up resistor should be chosen to limit the current through the output transistor; do not exceed the maximum
continuous output current of the device.
Note: This circuit cannot be used to program the device, as the series resistance is too large, and a minimum capacitance
of 0.1 µF must be connected from VCC to GND of the SIP to provide the current necessary to blow the fuse.
Typical Application:
R
S
100 Ohm
1
VCC
R
5V
L
1.2k Ohm
ATS635/636
V
Supply
Extensive applications information on magnets and Hall-effect sensors including Chopper-Stabilization is available in the
Allegro Electronic Data Book CD, or at the website: http://www.allegromicro.com .
0.1 µF
GND
4
2
VOUT
120 pF
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000
Copyright © 2005 Allegro MicroSystems, Inc.

ATS635LSE and ATS636LSE
PROGRAMMABLE TRUE POWER-ON HALL-EFFECT GEAR-TOOTH SWITCHES
CHARACTERISTIC DATA
Data taken from 3 lots, 30 pieces/lot
Reference Target 8x
ICC ON
ICC OFF
6
5
4
3
(mA)
CC
I
2
1
0
-50 -25 0 25 50 75 100 125 150 175
TEMPERATURE (°C)
4V
15V
24V
500
400
6
5
4
3
(mA)
CC
I
2
1
0
-50 -25 0 25 50 75 100 125 150 175
V
SAT
TEMPERATURE (°C)
4V
15V
24V
300
(mV)
SAT
V
200
20mA
100
0
-50 -25 0 25 50 75 100 125 150 175
TEMPERATURE (°C)
Page 11 of 15
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000
Copyright © 2005 Allegro MicroSystems, Inc.

ATS635LSE and ATS636LSE
PROGRAMMABLE TRUE POWER-ON HALL-EFFECT GEAR-TOOTH SWITCHES
CHARACTERISTIC DATA (continued)
Data taken from 3 lots, 30 pieces/lot
Reference Target 8x
BOP/BRP vs. Program Code
7
6
5
Code -8 BOP
Code -8 BRP
4
3
AIR GAP (mm)
Code 0 BOP
Code 0 BRP
Code +32 BOP
Code +32 BRP
Code +127 BOP
Code +127 BRP
2
1
0
-50 0 50 100 150 200
TEMPERATURE (°C)
Notes:
s Air gaps for Code 127 @ 150°C are interpolated due to test limitations at minimum air gap.
s These graphs are intended to provide an understanding of how the program codes affect the switch points. In a
production environment, individual devices would be programmed to individual codes to ensure all devices switch at
the same air gap.
Page 12 of 15
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000
Copyright © 2005 Allegro MicroSystems, Inc.

ATS635LSE and ATS636LSE
PROGRAMMABLE TRUE POWER-ON HALL-EFFECT GEAR-TOOTH SWITCHES
POWER DE-RATING – SE Package
Power De -Rating
Due to internal power consumption, the temperature of the
IC (junction temperature, TJ) is higher than the ambient
environment temperature, TA. To ensure that the device
does not operate above the maximum rated junction
temperature use the following calculations:
∆T=PD × R
Where PD = VCC × ICC
∴ ∆T = VCC × ICC × R
Where ∆T denotes the temperature rise resulting from the
IC’s power dissipation:
TJ = TA + ∆T R
Typical TJ Calculation:
TA = 25°C, V
PD = VCC × ICC
PD = 5 V × 5.5 mA = 27.5 mW
∆T = PD × R
TJ = TA + ∆T = 25°C + 2.0°C = 27.0°C
Maximum Allowable Power Dissipation Calculation
TJ = TA + ∆T
T
= 165°C, if TA = 150°C then:
J(max)
165 = 150 + ∆T
∆T = 15°C
DT = PD× R
\ P
D(max)
Maximum VCC for P
PD = VCC × ICC ICC = 10mA (max) at 150°C
VCC = PD / ICC = 195 mW / 5.5 mA = 35.4 V
θJA
θJA
= 77°C/W T
θJA
= 5 V, I
CC
= 27.5 mW × 77°C/W = 2.0°
θJA
(R
θJA
= 15°C / 77°C/W = 1 95 mW @ TA = 150°C
= 77°C/W)
θJA
D(max)
= 5.5 mA
CC(on)
=111 mW at TA=150°C
J(max)
= 165°C
Power Dissipation versus Ambient Temperature
4500
4000
3500
3000
(mW)
D
2500
2000
1500
1000
Power Dissipation, P
500
0
20 40 60 80 100 120 140 160 180
2-layer PCB
= 77 ºC/W)
(R
θJA
Temperature (°C)
Page 13 of 15
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000
Copyright © 2005 Allegro MicroSystems, Inc.

ATS635LSE and ATS636LSE
PROGRAMMABLE TRUE POWER-ON HALL-EFFECT GEAR-TOOTH SWITCHES
SE PACKAGE DIMENSIONS
Reference Dimensions Only
7 .276
20.95 .825
6.2 .244
11.6 .457
4.9 .193
10 .394
3.3 .130
0.6
1.3 .051
A
.240
C
B
E
A
2431
1.27 .050
2 .079
0.38 .015
1.08 .043
D
Dambar removal protrusion (16X)
Preliminary dimensions, for reference only
Untoleranced dimensions are nominal.
Dimensions in millimeters
U.S. Customary dimensions (in.) in brackets, for reference only
Dimensions exclusive of mold flash, burrs, and dambar protrusions
Exact case and lead configuration at supplier discretion within limits shown
Page 14 of 15
A
Metallic protrusion, electrically connected to pin 4 and substrate (both sides)
B
Active Area Depth, 0.43 mm [.017]
C
Thermoplastic Molded Lead Bar for alignment during shipment
D
Hall element (not to scale)
E
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000
Copyright © 2005 Allegro MicroSystems, Inc.

ATS635LSE and ATS636LSE
PROGRAMMABLE TRUE POWER-ON HALL-EFFECT GEAR-TOOTH SWITCHES
The products described herein are manufactured under one or more
of the following U.S. patents: 5,045,920; 5,264,783; 5,442,283;
5,389,889; 5,581,179; 5,517,112; 5,619,137; 5,621,319; 5,650,719;
5,686,894; 5,694,038; 5,719,130; 5,917,320; and other patents pending.
Allegro MicroSystems, Inc. reserves the right to make, from time to
time, such departures from the detail specifications as may be required to
permit improvements in the design of its products. Before placing an
order, the user is cautioned to verify that the information being relied
upon is current.
Allegro products are not authorized for use as critical components in
life-support applications, devices, or systems without express written
approval.
The information included herein is believed to be accurate and
reliable. However, Allegro MicroSystems, Inc. assumes no responsibility
for its use; nor for any infringements of patents or other rights of third
parties which may result from its use.
Page 15 of 15
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000
Copyright © 2005 Allegro MicroSystems, Inc.
 Loading...
Loading...