

查询3974供应商查询3974供应商
1
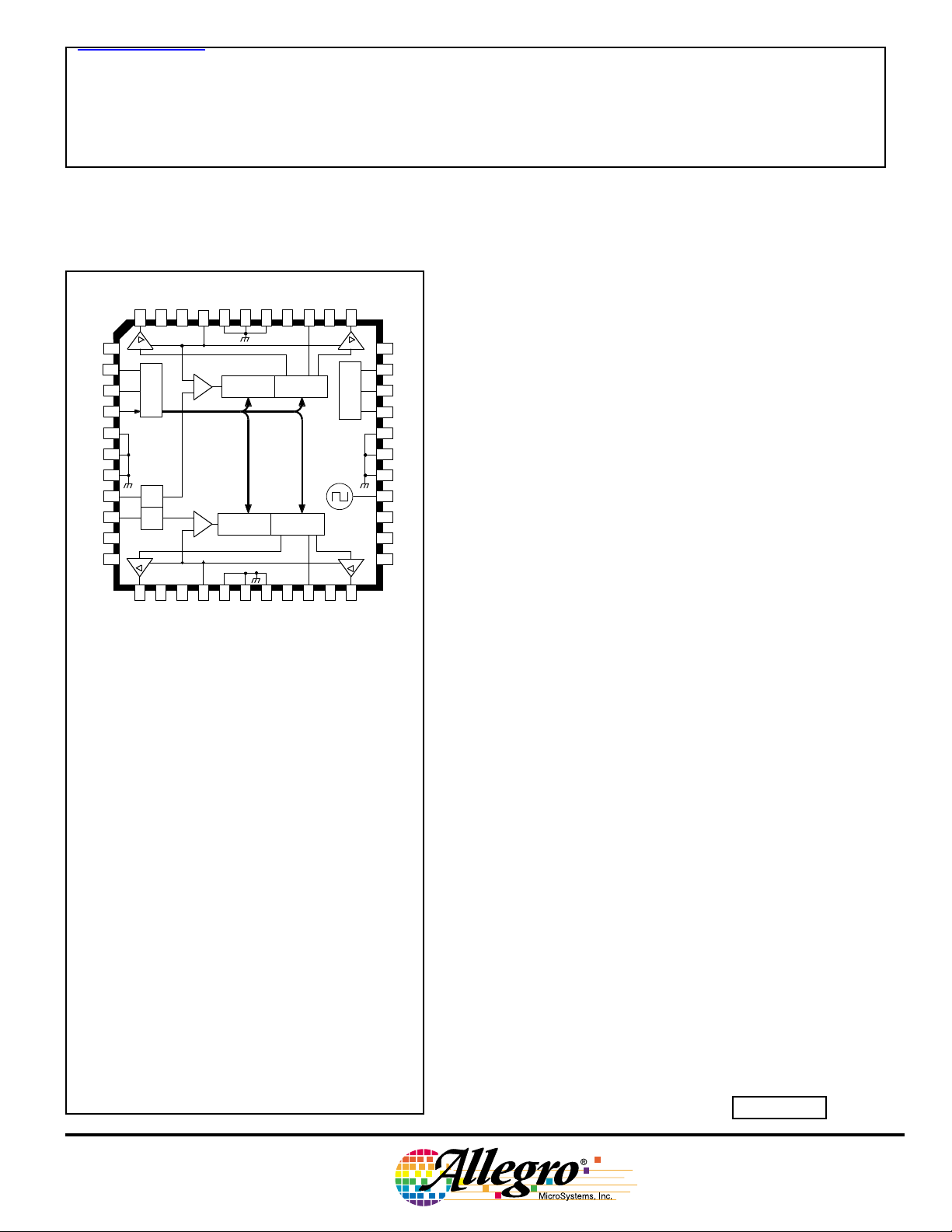
GND
44
24
GND
1
LOAD
SUPPLY
43
V
BB1
LOGIC
LOGIC
V
BB2
25
2
LOAD
SUPPLY
IN
ENABLE
42
26
2
ENABLE
NC
41
27
NC
DD
DD
1B
OUT
40
CHARGE PUMP
28
2B
OUT
+ 0.3 V
+ 1.0 V
1A
OUT
6
NC
7
STROBE
8
CLOCK
9
V
SERIAL PORT
÷
÷
DD
18
2A
OUT
DATA
10
GND
11
GND
12
GND
13
REF
1
14
REF
2
15
LOGIC
16
SUPPLY
NC
17 29
1
NC
NC
SENSE
GND
GND
2
3
21
2
SENSE
1
PROGRAM
PWM TIMER
PROGRAM
PWM TIMER
23
22
GND
GND
4
5
20
19
NC
NC
ABSOLUTE MAXIMUM RATINGS
= +25°C
at T
A
Load Supply Voltage, VBB............................ 50 V
Output Current, I
Logic Supply Voltage, VDD.......................... 7.0 V
Logic Input Voltage Range, V
Continous ................... -0.3 V to V
tW < 30 ns ................... -1.0 V to V
Reference Voltage, V
Sense Voltage (dc), V
Continous .............................................. 0.5 V
t
< 1 µs ................................................ 2.5 V
W
Package Power Dissipation, PD.................. 3.9 W
Operating Temperature Range,
T
......................................... -20°C to +85°C
A
Junction Temperature, T
Storage Temperature Range,
T
....................................... -55°C to +150°C
S
Output current rating may be limited by duty cycle,
ambient temperature, and heat sinking. Under any set
of conditions, do not exceed the specified current rating
or a junction temperature of 150°C.
.................................. ±1.5 A
OUT
................................. 3 V
REF
S
......................... +150°C
J
3974
Designed for pulse-width modulated (PWM) current control
of two dc motors, the A3974SED is capable of output currents to
±1.5 A and operating voltages to 50 V. Internal fixed off-time
NC
39
CP2
38
CP1
37
CP
36
GND
35
GND
34
GND
33
OSC
32
SLEEP
31
REG
V
30
NC
Dwg. PP-073
PWM current-control timing circuitry can be programmed via a
serial interface to operate in slow, fast, and mixed current-decay
modes.
Independant ENABLE input terminals are provided for use in
controlling the speed and torque of each dc motor with externally
applied PWM control signals.
Synchronous rectification circuitry allows the load current to
flow through the low
the current decay. This feature will eliminate the need for
external clamp diodes in most applications, saving cost and
external component count, while minimizing power dissipation.
Internal circuit protection includes thermal shutdown with
hysteresis, undervoltage monitoring of V
pump, and crossover-current protection. Special power-up
sequencing is not required.
The A3974SED is supplied in a 44-lead plastic PLCC with
four copper batwing tabs for maximum heat dissipation. The
power tabs are at ground potential and need no electrical isolation.
FEATURES
■ ±1.5 A, 50 V Continuous Output Rating
■ Low
■
■ Serial-Interface Controls Chip Functions
■ Synchronous Rectification for Low Power Dissipation
■ Internal UVLO and Thermal Shutdown Circuitry
■ Crossover-Current Protection
■ Sleep and Idle Modes
Always order by complete part number: A3974SED .
DMOS DUAL FULL-BRIDGE
PWM MOTOR DRIVER
r
of the DMOS output driver during
DS(on)
and the charge
DD
r
DMOS Output Drivers
DS(on)
Programmable Slow, Fast, and Mixed Current-Decay Modes
Data Sheet
29319.35
3974
DMOS DUAL FULL-BRIDGE
PWM MOTOR DRIVER
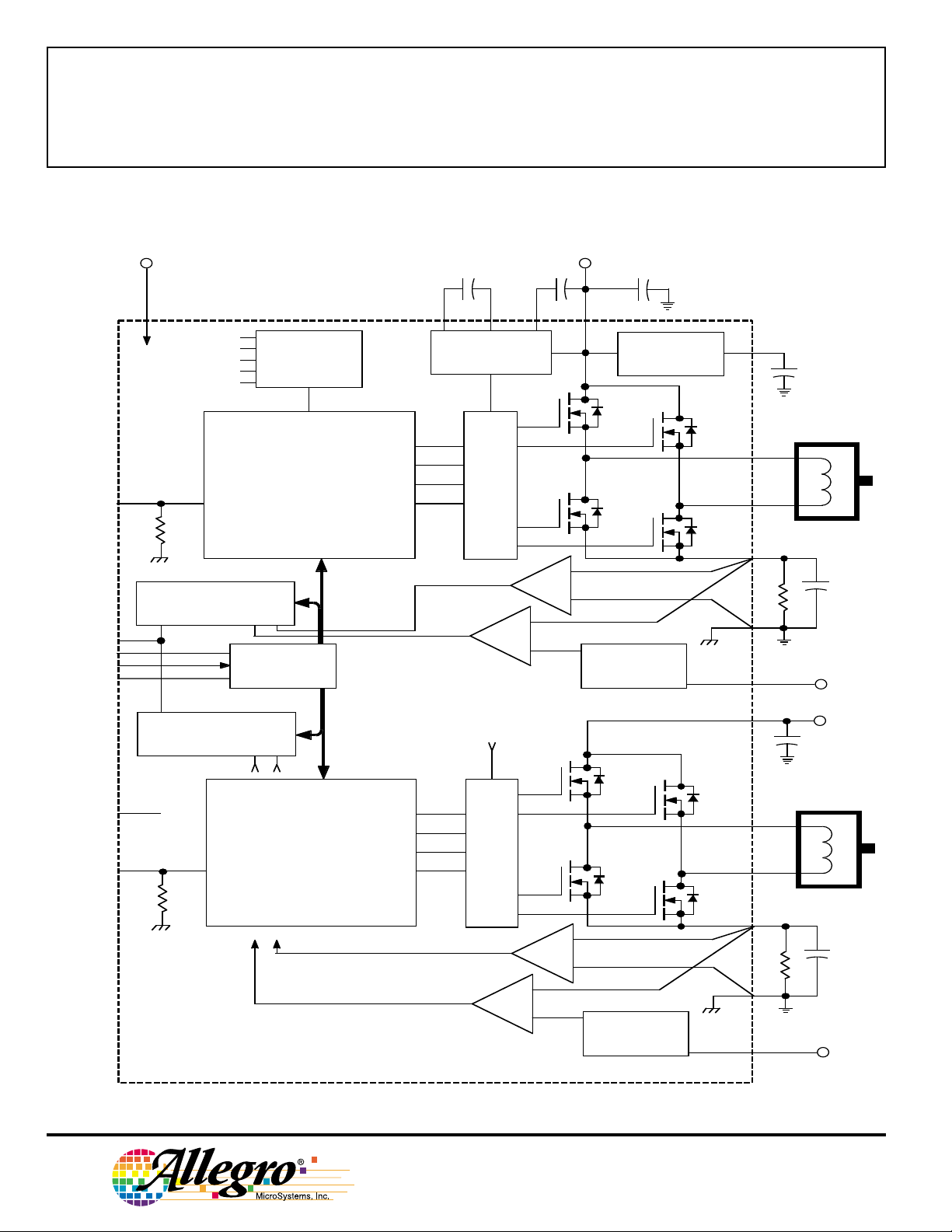
FUNCTIONAL BLOCK DIAGRAM
DD
V
LOGIC
SUPPLY
CHARGE PUMP
BANDGAP
C
V
REG
TSD
DD
UNDER-
VOLTAGE &
FAULT DETECT
CP1
CHARGE
PUMP
CP2
CP
V
BB1
LOAD
SUPPLY
+
1
BANDGAP
REGULATOR
V
REG
ENABLE
OSC
CLOCK
DATA
STROBE
SLEEP
MODE
ENABLE
1
PROGRAMMABLE
PROGRAMMABLE
2
PWM TIMER
PWM TIMER
CONTROL LOGIC
FIXED OFF
BLANK
DECAY
SERIAL
PORT
FIXED OFF
BLANK
DECAY
CONTROL LOGIC
TO PWM TIMER
PHASE
SYNC RECT MODE
SYNC RECT DISABLE
PHASE
ENABLE
SYNC RECT MODE
SYNC RECT DISABLE
MODE
PWM MODE INT
PWM MODE EXT
GATE DRIVE
CHARGE
PUMP
GATE DRIVE
ZERO CURRENT DETECT
CURRENT SENSE
ZERO CURRENT DETECT
REFERENCE
BUFFER &
DIVIDER
OUT
1A
OUT
1B
SENSE
REF
1
LOAD
SUPPLY
OUT
OUT
SENSE
1
C
S1
R
S1
V
REF
2
V
BB2
+
2A
2B
2
C
S2
R
S2
CURRENT SENSE
REFERENCE
BUFFER &
DIVIDER
2
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000
REF
2
V
REF2
Dwg. FP-048-1
Copyright © 2001 Allegro MicroSystems, Inc.
3974
DMOS DUAL FULL-BRIDGE
PWM MOTOR DRIVER
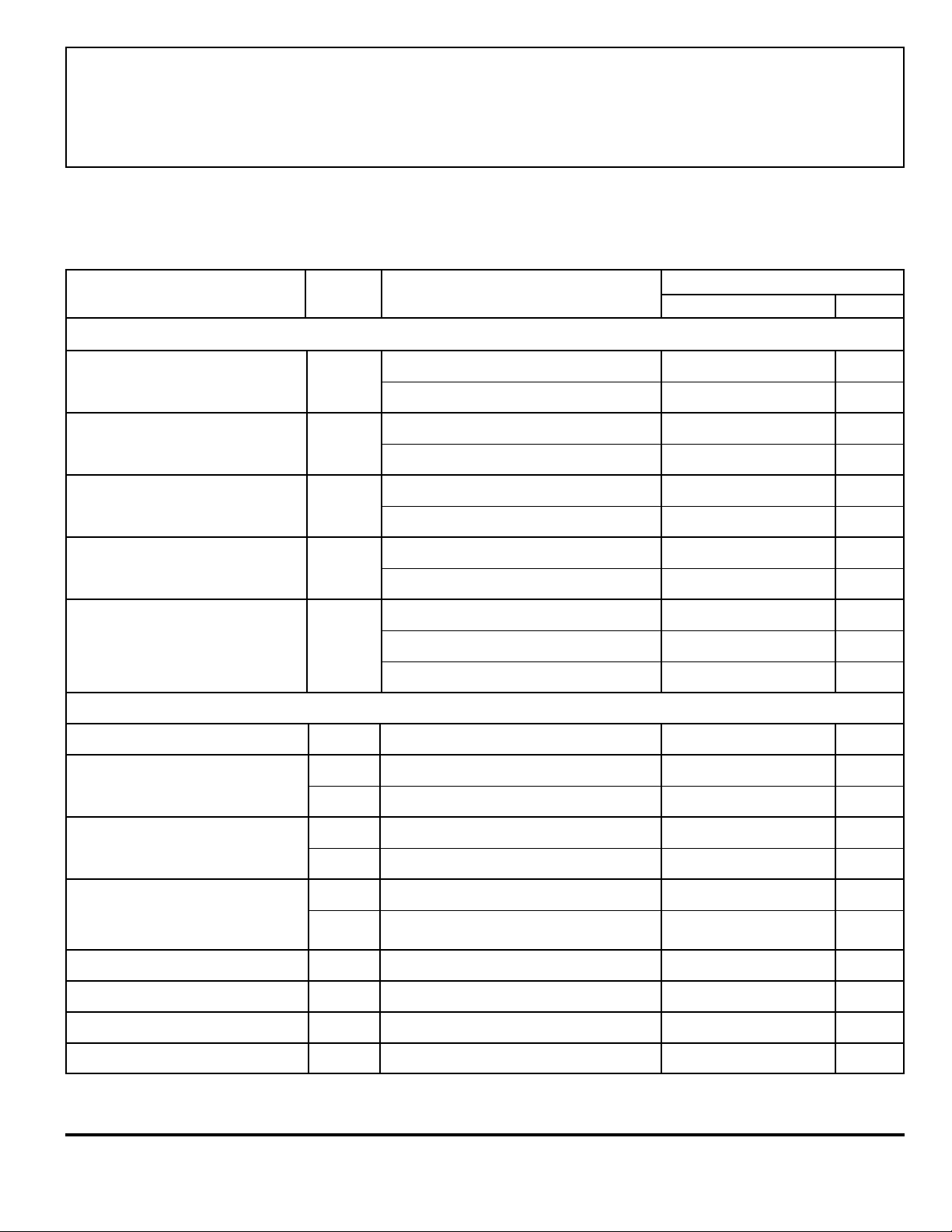
ELECTRICAL CHARACTERISTICS at T
= +25°C, V
A
= 50 V, VDD = 5.0 V, f
BB
< 50 kHz (unless
PWM
otherwise noted).
Limits
Characteristic Symbol Test Conditions Min. Typ. Max. Units
Output Drivers
Load Supply Voltage Range V
Output Leakage Current I
Output ON Resistance r
DS(on)
Body Diode Forward Voltage V
Load Supply Current I
BB
DSS
F
BB
Operating 15 — 50 V
During sleep mode 0 — 50 V
V
= V
OUT
V
OUT
Source driver, I
Sink driver, I
BB
= 0 V — <-1.0 -20 µA
= -1.5 A — 0.5 0.55 Ω
OUT
= 1.5 A — 0.315 0.35 Ω
OUT
— <1.0 20 µA
Source diode, IF = 1.5 A — — 1.2 V
Sink diode, IF = 1.5 A — — 1.2 V
f
< 50 kHz — 4.0 7.0 mA
PWM
Charge pump on, outputs disabled — 2.0 5.0 mA
Sleep or idle mode — — 20 µA
Control Logic
Logic Supply Voltage Range V
Logic Input Voltage V
V
Logic Input Current I
(except ENABLE)
ENABLE Input Current I
I
OSC Input Frequency f
DD
IN(1)
IN(0)
IN(1)
I
IN(0)
EN(1)
EN(0)
OSC
Operating 4.5 5.0 5.5 V
2.0 — — V
— — 0.8 V
V
= 2.0 V — <1.0 ±20 µA
IN
V
= 0.8 V — <1.0 ±20 µA
IN
V
= 2.0 V — 40 100 µA
EN
V
= 0.8 V — 16 30 µA
EN
2.9 — 6.1 MHz
OSC Input Duty Cycle — 40 — 60 %
OSC Input Hysterisis ∆V
Reference Input Voltage Range V
REF
IN
Operating 0 — 2.6 V
200 — 400 mV
continued next page ...
www.allegromicro.com
3
3974
DMOS DUAL FULL-BRIDGE
PWM MOTOR DRIVER
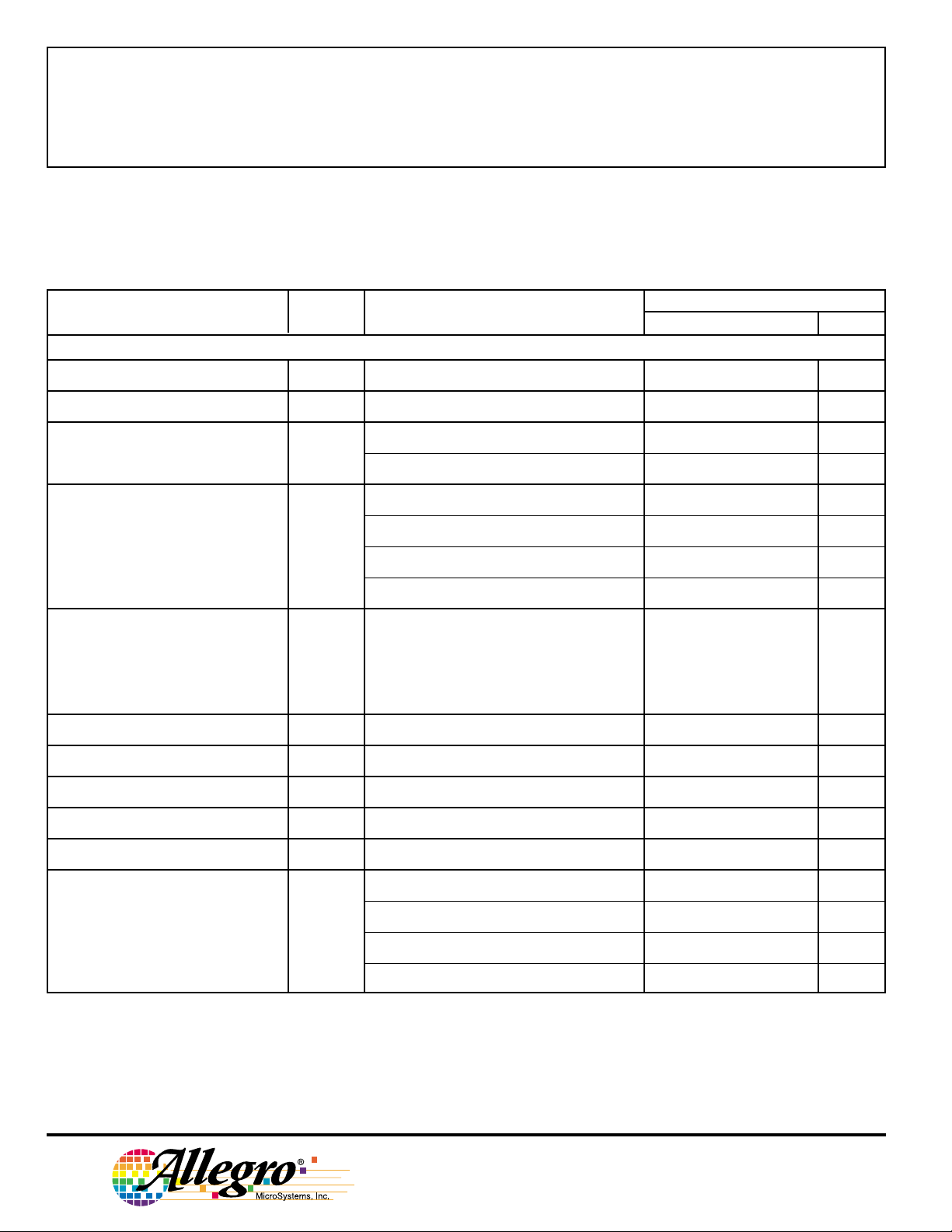
ELECTRICAL CHARACTERISTICS at T
= +25°C, V
A
= 50 V, VDD = 5.0 V, f
BB
< 50 kHz (unless
PWM
otherwise noted), continued.
Limits
Characteristic Symbol Test Conditions Min. Typ. Max. Units
Control Logic (continued)
Reference Input Current I
Reference Input Offset Voltage V
Reference Divider Ratio V
REF/VS
Gain (Gm) Error (note 3) E
Propagation Delay Time t
REF
IO
G
pd
V
= 2.6 V — — ±1.0 µA
REF
— ±10 — mV
D16 = 1 — 10 — —
D16 = 0 — 5.0 — —
V
= 2.6 V, D16 = 0 — 0 ±4.0 %
REF
V
= 0.5 V, D16 = 0 — 0 ±14 %
REF
V
= 2.6 V, D16 = 1 — 0 ±4.0 %
REF
V
= 0.5 V, D16 = 1 — 0 ±10 %
REF
50% TO 90%:
PWM change to source on 600 750 1000 ns
PWM change to source off 50 150 350 ns
PWM change to sink on 600 750 1000 ns
PWM change to sink off 50 150 350 ns
Crossover Delay Time t
Thermal Shutdown Temperature T
Thermal Shutdown Hysteresis ∆T
UVLO Enable Threshold V
UVLO Hysteresis ∆V
Logic Supply Current I
COD
J
J
UVLO
UVLO
DD
NOTES: 1. Typical Data is for design information only.
2. Negative current is defined as coming out of (sourcing) the specified device terminal.
3. EG = [(V
/Range) - VS]/(V
REF
/Range).
REF
4
SR enabled 300 600 1000 ns
— 165 — °C
—15— °C
Increasing V
DD
3.9 4.2 4.45 V
0.05 0.10 — V
f
< 50 kHz — — 10 mA
PWM
Outputs off — — 8.0 mA
Idle mode (D18 = 1, D19 = 0) — — 1.5 mA
Sleep mode (inputs below 0.5 V) — — 100 µA
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000

DMOS DUAL FULL-BRIDGE
FUNCTIONAL DESCRIPTION
3974
PWM MOTOR DRIVER
Serial Interface. The A3974SED is controlled via a 3-wire
(clock, data,strobe) serial port. The programmable functions
allow maximum flexibility in configuring the PWM to the
motor drive requirements. The serial data is written as two 20bit words: 1 bit to select the word and 19 bits of data. The data
is clocked in starting with D19.
Word 0 Bit Assignments
Select Word 0 (D18 = 0)
Bit Function
D0 Bridge 1 blank time LSB
D1 Bridge 1 blank time MSB
D2 Bridge 1 off-time LSB
D3 Bridge 1 off-time bit 1
D4 Bridge 1 off-time bit 2
D5 Bridge 1 off-time bit 3
D6 Bridge 1 off-time MSB
D7 Bridge 1 fast-decay time bit LSB
D8 Bridge 1 fast-decay time bit 1
D9 Bridge 1 fast-decay time bit 2
D10 Bridge 1 fast-decay time MSB
D11 Bridge 1 sync. rect. control
D12 Bridge 1 sync. rect. control
D13 Bridge 1 external PWM mode
D14 Bridge 1 enable
D15 Bridge 1 phase
D16 Bridge 1 reference range select
D17 Bridge 1 internal PWM mode
D18 Word select = 0
D19 Test mode
D0 – D1 Blank Time. The current-sense comparator is
blanked when any output driver is switched on, according to the
table below. f
is the oscillator input frequency.
osc
D1 D0 Blank Time
00 4/f
01 6/f
1 0 12/f
1 1 24/f
OSC
OSC
OSC
OSC
D2 – D6 Fixed Off Time. This five-bit word sets the fixed
off-time for the internal PWM control circuitry. The off-time is
defined by
t
=(8 [1 + N]/f
off
OSC
) - 1/f
OSC
where N = 0 .... 31
For example, with an oscillator frequency of 4 MHz, the
fixed off-time will be adjustable from 1.75 µs to 63.75 µs in
increments of 2 µs.
D7 – D10 Fast Decay Time. This four-bit word sets the fastdecay portion of the fixed off-time for the internal PWM control
circuitry. This will only have impact if mixed-decay mode is
selected (via bit D17). For tfd > t
, the device will effectively
off
operate in fast-decay mode. The fast-decay portion is defined
by
tfd = (8[1 + N]/f
OSC
] - 1/f
OSC
where N = 0 .... 15
For example, with an oscillator frequency of 4 MHz, the fast-
decay time will be adjustable from 1.75 µs to 31.75 µs in
increments of 2 µs.
D11 – D12 Synchronous Rectification.
D12 D11 Synchronous Rectifier
0 0 Disabled
0 1 Low side only
1 0 Active
1 1 Passive
The different modes of operation are described in the synchronous rectification section of the functional description.
D13 External PWM Decay Mode. This bit determines the
current-decay mode when using ENABLE chopping for
external PWM current control.
D13 Mode
0 Fast
1 Slow
www.allegromicro.com
continued next page ...
5

3974
DMOS DUAL FULL-BRIDGE
PWM MOTOR DRIVER
FUNCTIONAL DESCRIPTION (continued)
D14 Enable Logic. This bit, in conjuction with ENABLE,
determines if the output drivers are in the chopped or on state.
ENABLE1 D14 Mode
0 0 Chopped
10On
01On
1 1 Chopped
D15 Phase Logic. This bit determines if the device is
operating in the forward or reverse state.
D15 State OUT
0 Reverse L H
1 Forward H L
D16 Gm Range Select. This bit determines if V
by 5 or 10.
D16 Divider
0 ÷10
1 ÷5
OUT
A
B
REF
is divided
Word 1 Bit Assignments
Select Word 1 (D18 = 1)
Bit Function
D0 Bridge 2 blank time LSB
D1 Bridge 2 blank time MSB
D2 Bridge 2 off-time LSB
D3 Bridge 2 off-time bit 1
D4 Bridge 2 off-time bit 2
D5 Bridge 2 off-time bit 3
D6 Bridge 2 off-time MSB
D7 Bridge 2 fast-decay time bit LSB
D8 Bridge 2 fast-decay time bit 1
D9 Bridge 2 fast-decay time bit 2
D10 Bridge 2 fast-decay time bit MSB
D11 Bridge 2 sync. rect. control
D12 Bridge 2 sync. rect. control
D13 Bridge 2 external PWM mode
D14 Bridge 2 enable
D15 Bridge 2 phase
D16 Bridge 2 reference range select
D17 Bridge 2 internal PWM mode
D18 Word select = 1
D19 Idle mode
D17 Bridge 2 Mode. This bit determines slow or mixed
decay for internal current-control operation.
D17 Decay Mode
0 Mixed
1 Slow
D19 Test Mode. This bit is reserved for testing and should
never be changed by the user. Default (low) operates the
device in normal mode.
6
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000
D0 - D17. Identical definitions as Word 0, with Word 1
selected. Data is written to Full Bridge 2.
D19 Idle Mode. The device can be placed in a low-power
“idle” mode by writing a “0” to D19. The outputs will be
disabled, the charge pump will be turned off, and the device
will draw a lower load supply currrent. The undervoltage
monitor circuit will remain active. D19 should be programmed
high for 1 ms before attempting to enable any output driver.
continued next page ...

FUNCTIONAL DESCRIPTION (continued)
V
. This internally generated supply voltage is used to
REG
operate the sink-side DMOS outputs. V
monitored and in the case of a fault condition, the outputs of the
device are disabled. The V
terminal should be decoupled
REG
with a 0.22 µF capacitor to ground.
Charge Pump. The charge pump is used to generate a supply
voltage greater than VBB to drive the source-side DMOS gates.
A 0.22 µF ceramic capacitor should be connected between CP1
and CP2 for pumping purposes. A 0.22 µF ceramic capacitor
should be connected between V
and VBB to act as a reservoir
CP
to run the high-side DMOS devices. The CP voltage is internally monitored and in the case of a fault condition, the outputs
of the device are disabled.
is internally
REG
3974
DMOS DUAL FULL-BRIDGE
PWM MOTOR DRIVER
Sleep Mode. The input terminal SLEEP is dedicated to
putting the device into a minimum current draw mode. When
asserted low, the serial port will be reset to all zeros and all
circuits will be disabled.
PWM Timer Function. The PWM timer is programmable via
the serial port (bits D2 – D10) to provide fixed off-time PWM
signals to the control circuitry. In mixed current-decay mode,
the first portion of the off time operates in fast decay, until the
fast-decay time count is reached (serial bits D7 – D10), followed by slow decay for the rest of the off-time period (bits D2
– D6). If the fast-decay time is set longer than the off-time, the
device effectively operates in fast-decay mode. Bit D17 selects
mixed or slow decay.
Shutdown. In the event of a fault due to excessive junction
temperature, or low voltage on CP or V
, the outputs of the
REG
device are disabled until the fault condition is removed. At
power up, or in the event of low VDD, the UVLO circuit
disables the drivers and resets the data in the serial port to all
zeros.
Current Regulation. Load current is regulated by an internal
fixed off-time PWM control circuit. When the outputs of the
DMOS H-bridge are turned on, the current increases in the
motor winding until it reaches a trip value determined by the
external sense resistor (RS), the applied analog reference
voltage (V
When D16 = 0....................... I
When D16 = 1....................... I
), and serial data bit D16:
REF
TRIP
TRIP
= V
= V
REF
REF
/10R
/5R
S
S
At the trip point, the sense comparator resets the source-enable
latch, turning off the source driver (except in the case of lowside only mode where the sink driver is turned off). The load
inductance then causes the current to recirculate for the serialport programmed fixed off-time period. The current path
during recirculation is determined by the configuration of slow/
mixed-decay mode (D17) and the synchronous rectification
control bits (D11 and D12).
Synchronous Rectification. When a PWM off cycle is
triggered, either by an ENABLE chop command or internal
fixed off-time cycle, load current will recirculate according to
the decay mode selected by the control logic. After a short
crossover delay, the A3974 synchronous rectification feature
will turn on the appropriate MOSFET (or pair of MOSFETs for
the mixed decay portion of the off-time) during the current
decay and effectively short out the body diodes with the low
r
driver. This will lower power dissipation significantly
DS(on)
and can eliminate the need for external Schottky diodes.
Synchronous rectification can be configured in active mode,
passive mode, low side only, or disabled via the serial port (bits
D11 and D12). The active mode prevents reversal of load
current by turning off synchronous rectification when a zero
current level is detected. Passive mode will allow reversal of
current but will turn off the synchronous rectifier circuit if the
load current inversion ramps up to the current limit set by
V
/10RS (when D16 = 0) or V
REF
/5RS(when D16 = 1).
REF
Low side only mode will switch the low-side MOSFETs on
during the off time to short out the current path through the
MOSFET body diode. With this setting, the high-side
MOSFETs will not synchronously rectify so four external
diodes from output to supply are recommended. This mode is
intended for use with high-power applications where it is
desired to save the expense of two external diodes per bridge.
In this mode, the sink-side MOSFETs are chopped during the
PWM off time. In all other cases, the source-side MOSFETs
are chopped in response to a PWM OFF command.
www.allegromicro.com
7

3974
DMOS DUAL FULL-BRIDGE
PWM MOTOR DRIVER
APPLICATIONS INFORMATION
Current Sensing. To minimize inaccuracies in sensing the
I
current level caused by ground-trace IR drops, the sense
TRIP
resistor should have an independent ground return to a ground
terminal of the device. For low-value sense resistors, the IR
drops in the PCB sense traces of the resistor can be significant
and should be taken into account. The use of sockets should be
avoided as they can introduce variation in RS due to their
contact resistance.
The maximum value of RS is given as RS = 0.5/I
TRIPMAX
.
Braking. The braking function is implemented by driving the
device in slow-decay mode via serial port bit D13, enabling
synchronous rectification via bits D11 and D12, and applying
an enable chop command with the combination of D14 and the
ENABLE input terminal. Because it is possible to drive current
in both directions through the DMOS switches, this configuration effectively shorts out the motor-generated BEMF as long as
the ENABLE chop mode is asserted. It is important to note that
the internal PWM current-control circuit will not limit the
current when braking, because the current does not flow
through the sense resistor. The maximum brake current can be
approximated by V
BEMF/RL
. Care should be taken to ensure that
the maximum ratings of the device are not exceeded in worstcase braking situations of high speed and high inertial loads.
Thermal protection. Circuitry turns off all drivers when the
junction temperature reaches 165°C typically. It is intended
only to protect the device from failures due to excessive
junction temperatures and should not imply that output short
circuits are permitted. Thermal shutdown has a hysteresis of
approximately 15°C.
Layout. The printed wiring board should use a heavy ground
plane. For optimum electrical and thermal performance, the
driver should be soldered directly onto the board. The ground
side of RS should have an individual path to a ground terminal
of the device. This path should be as short as is possible
physically and should not have any other components connected to it. The load supply terminal, VBB, should be
decoupled with an electrolytic capacitor (>47 µF is recom-
mended) placed as close to the device as is possible.
Serial Port Write Timing Operation. Data is clocked into
shift register on the rising edge of CLOCK signal. Normally,
STROBE will be held high, and only will be brought low to
initiate a write cycle. Refer to diagram below and specification
table for timing requirements.
STROBE
CLOCK
DATA
E
A
B
D19 D0D18
F
GC D
Dwg. WP-038
A. Minimum Data Setup Time ........................................... 15 ns
B. Minimum Data Hold Time ............................................ 10 ns
C. Minimum Setup Strobe to Clock Rising Edge .......... 50 ns
D. Minimum Clock High Pulse Width ........................... 50 ns
E. Minimum Clock Low Pulse Width ............................ 50 ns
F. Minimum Setup Clock Rising Edge to Strobe........... 50 ns
G. Minimum Strobe Pulse Width ................................... 50 ns
8
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000

DMOS DUAL FULL-BRIDGE
PWM MOTOR DRIVER
Terminal List
Terminal Name Terminal Description Terminal Number
GND Power and logic ground terminals 1, 2
SENSE
1
NC No (internal) connection 4, 5
OUT
1A
NC No (internal) connection 7
STROBE Logic input for serial Interface 8
CLOCK Logic input for serial Interface 9
DATA Logic input for serial Interface 10
GND Power and logic ground terminals 11, 12, 13
REF
1
REF
2
LOGIC SUPPLY V
NC No (internal) connection 17
OUT
2A
NC No (internal) connection 19, 20
SENSE
2
GND Power and logic ground terminals 22, 23, 24
LOAD SUPPLY
ENABLE
2
2
NC No (internal) connection 27
OUT
2B
NC No (internal) connection 29
V
REG
SLEEP Logic input for SLEEP mode 31
OSC Logic-level oscillator (square wave) input 32
GND Power and logic ground terminals 33, 34, 35
CP Reservoir capacitor (typically 0.22 µF) 36
CP1 & CP2 The charge pump capacitor (typically 0.22 µF) 37 & 38
NC No (internal) connection 39
OUT
1B
NC No (internal) connection 41
ENABLE
LOAD SUPPLY
1
1
GND Power and logic ground terminals 44
Sense resistor terminal for bridge 1 3
DMOS H-bridge 1 – output A 6
Gm reference input voltage – bridge 1 14
Gm reference input voltage – bridge 2 15
, the low voltage (typically 5 V) supply 16
DD
DMOS H-bridge 2 – output A 18
Sense resistor pin for bridge 2 21
V
, the high current, 20 V to 50 V,
BB2
supply for bridge 2 25
Logic input for bridge 2 – enable control 26
DMOS H-bridge 2 – output B 28
Regulator decoupling capacitor (typ. 0.22 µF) 30
DMOS H-bridge 1 – output B 40
Logic input for bridge 1 – enable control 42
V
, the high current, 20 V to 50 V,
BB1
supply for bridge 1 43
3974
www.allegromicro.com
9

3974
DMOS DUAL FULL-BRIDGE
PWM MOTOR DRIVER
Dimensions in Inches
(controlling dimensions)
0.319
0.291
0.319
0.291
0.021
0.013
0.050
BSC
0.020
MIN
0.180
0.165
0.695
0.685
0.656
0.650
0.032
0.026
29
39
40
28
0.656
0.650
144
2
0.695
0.685
18
17
INDEX AREA
7
6
Dwg. MA-005-44A in
NOTES: 1. Lead spacing tolerance is non-cumulative.
2. Exact body and lead configuration at vendor’s option within limits shown.
3. Available in standard sticks/tubes of 28 devices or add “TR” to part number for tape and reel.
10
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000

DMOS DUAL FULL-BRIDGE
Dimensions in Millimeters
(for reference only)
3974
PWM MOTOR DRIVER
8.10
7.39
8.10
7.39
0.533
0.331
1.27
BSC
0.51
MIN
4.57
4.20
17.65
17.40
16.662
16.510
0.812
0.661
29
39
40
28
16.662
16.510
144
17.65
17.40
INDEX AREA
2
18
17
7
6
Dwg. MA-005-44A mm
NOTES: 1. Lead spacing tolerance is non-cumulative.
2. Exact body and lead configuration at vendor’s option within limits shown.
3. Available in standard sticks/tubes of 28 devices or add “TR” to part number for tape and reel.
www.allegromicro.com
11

3974
DMOS DUAL FULL-BRIDGE
PWM MOTOR DRIVER
12
The products described here are manufactured under one or more
U.S. patents or U.S. patents pending.
Allegro MicroSystems, Inc. reserves the right to make, from time to
time, such departures from the detail specifications as may be
required to permit improvements in the performance, reliability, or
manufacturability of its products. Before placing an order, the user is
cautioned to verify that the information being relied upon is current.
Allegro products are not authorized for use as critical components
in life-support devices or systems without express written approval.
The information included herein is believed to be accurate and
reliable. However, Allegro MicroSystems, Inc. assumes no responsibility for its use; nor for any infringement of patents or other rights of
third parties which may result from its use.
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000
 Loading...
Loading...