

Page 1
LDH400P
400W DC Electronic Loads
INSTRUCTIONS EN FRANCAIS
Page 2

Table des matières
1. Specification ................................................................................................. 3
2. Sécurité ......................................................................................................... 7
3. Installation .................................................................................................... 8
3.1 Tension de fonctionnement secteur .................................................................................... 8
3.2 Câble d’alimentation secteur ............................................................................................... 8
3.3 Montage ............................................................................................................................. 8
3.4 Ventilation ........................................................................................................................... 8
3.5 Fusibles .............................................................................................................................. 9
4. Connexions ...................................................................................................10
4.1 Connexions du panneau avant ......................................................................................... 10
4.2 Connexions du panneau arrière ........................................................................................ 10
4.3 Protection contre le courant d’erreur éventuelle ................................................................ 11
5. Première utili s ation ......................................................................................12
5.1 Organisation du présent manuel ....................................................................................... 12
5.2 Raccordement de la charge à la source............................................................................ 14
5.3 Mise sous tension ............................................................................................................. 15
6. Utilisation du panneau avant .......................................................................16
6.1 Touches et Δ Ajust (ajuster) .............................................................................................. 16
6.2 Affichage et écran d'accueil .............................................................................................. 17
6.3 Saisie numérique générale des paramètres ...................................................................... 19
6.4 Variation des valeurs de paramètre en utilisant la section Δ Adjust ................................... 19
6.5 Configuration de la charge ................................................................................................ 20
6.6 Sélection du Mode de charge ........................................................................................... 20
6.7 Réglage du niveau A et du niveau B ................................................................................. 20
6.8 Tension de mise au repos ................................................................................................. 20
6.9 Démarrage lent ................................................................................................................. 21
6.10 Introduction au fonctionnement transitoire ........................................................................ 21
6.11 Menu transitoire ................................................................................................................ 22
6.12 Fréquence transitoire ........................................................................................................ 22
6.13 Cycle de service transitoire ............................................................................................... 22
6.14 Vitesse de balayage ......................................................................................................... 23
6.15 Limites de tension et de courant ....................................................................................... 24
6.16 Fonctionnalités de sauvegarde et de réinitialisation .......................................................... 25
6.17 Menu des utilitaires ........................................................................................................... 26
7. Contrôle à distance analogique ...................................................................28
8. Notes d’application ......................................................................................29
8.1 Sources ............................................................................................................................ 29
8.2 Stabilité des combinaisons de source et de chargeur ....................................................... 30
8.3 Comportement dynamique en fonctionnement transitoire ................................................. 30
8.4 États transitoires de démarrage ........................................................................................ 31
8.5 Caractéristiques de chaque mode d'exploitation ............................................................... 31
8.6 Fonctionnement d’unités multiples .................................................................................... 33
1
Page 3

9. Configuration de l’inter face de comm ande à dist ance ............................... 34
9.1 Interface GP IB .................................................................................................................. 34
9.2 Interface RS232 ............................................................................................................... 34
9.3 Interface USB et installation du pilote de l’instrument ....................................................... 35
9.4 Interface LAN ................................................................................................................... 36
9.5 Verrouillage de l’interface ................................................................................................. 38
10. Rapport d'état .............................................................................................. 39
10.1 Les registres ’Input State’ et ’Input Trip’ (ISE & RIR et ISR & ITE). ................................... 39
10.2 Standard Event Status Register (registre d'état d'événement standard) (ESR et ESE) ..... 41
10.3 Execution Error Register (registre d’erreur d’exécution) EER ........................................... 41
10.4 Registres Status Byte (STB) et Service Request Enable (SRE) de GPIB ......................... 42
10.5 Réglages à la mise en marche ......................................................................................... 43
10.6 Modèle de Statut LDH400P .............................................................................................. 44
10.7 Résumé de registre .......................................................................................................... 45
11. Commandes à distance ............................................................................... 46
11.1 Opération distante et locale .............................................................................................. 46
11.2 Utilisation des commandes à distance .............................................................................. 46
11.3 Formats des commandes à distance ................................................................................ 46
11.4 Temps de la commande ................................................................................................... 47
11.5 Formats de réponses ........................................................................................................ 47
11.6 Liste des commandes ....................................................................................................... 48
12. Entretien ...................................................................................................... 52
12.1 Nettoyage ......................................................................................................................... 52
12.2 Fusibles ............................................................................................................................ 52
12.3 Calibration ........................................................................................................................ 52
12.4 Mise à jour du micrologiciel .............................................................................................. 52
12.5 Dépannage ....................................................................................................................... 52
Ces informations sont également téléchargeables depuis la page de support du site
Internet de
Aim-TTi. Numéro du manuel 48511-1830, 1 édition.
2
Page 4

Current:
16 Amps max. through the front and rear panel terminals.
Voltage:
500 Volts max. while conducting current.
Power:
400 Watts max. up to 28ºC, derating to 360 watts at 40ºC.
Minimum Operating Voltage:
10V.
resistance:
1180kΩ to load negative).
Reverse Polarity:
Body diode will conduct; 16 Amps max.
Isolation Voltage:
CAT II (300V) either load input to chassis ground.
Rear Panel Input:
Safety terminals accepting 4mm plugs at 16 Amps max.
Front Panel Input:
Safety terminals accepting 4mm plugs at 16 Amps max.
Current Range:
0 to 16 A (1 mA resolution).
Setting Accuracy:
± 0·2% ± 30 mA.
Regulation:
< 30 mA for 90% load power change (V > 25 Volts).
Temperature Coefficient:
< (±0·02% ± 5 mA) per ºC.
Slew Rate Range:
5 Amp per s to 500 Amp per ms.
Minimum transition time:
50 µs.
Power Range:
0 to 400 Watts (100 mW resolution).
Setting Accuracy:
± 0·5% ± 2 W ± 30 mA (V > 25 Volts).
Regulation:
< 2% over 25 V to 550 V source voltage change.
Temperature Coefficient:
< (± 0·1% ± 5 mA) per ºC.
Slew Rate Range:
60 W per s to 6000 W per ms.
Minimum transition time:
150 µs.
Resistance Range:
50 Ω to 10 kΩ (1 Ω resolution).
Setting Accuracy:
±0·5% ± 2 digits ± 30 mA (V > 25 Volts).
Regulation:
< 2% for 90% load power change (V > 25 Volts).
Temperature Coefficient:
< (±0·04% ± 5 mA) per ºC.
Slew Rate Range:
1 Ω per ms to 100 Ω per µs.
Minimum transition time:
150 µs.
1. Specification
Accuracy specifications apply for 18°C – 28ºC, using the rear panel terminals, after 30 minutes
operation at the set conditions. Setting accuracies apply with slew rate at the ‘Default’ setting.
INPUT
Maximum Input Ratings
Minimum effective
Off State Leakage: <5 mA (including voltage sense circuit input resistance - typically
Input Terminals
OPERATING MODES
Constant Current Mode (CC)
(1)
(2)
1Ω .
Constant Power Mode (CP)
(1)
(2)
Constant Resistance Mode (CR)
(1)
(2)
3
Page 5

Conductance Range:
0·001 to 1 A/V (1 mA/V resolution)
Setting Accuracy:
± 0·5% ± 2 digits ± 30 mA (V > 25 Volts).
Regulation:
< 2% for 90% load power change (V > 25 Volts).
Temperature Coefficient:
< (±0·04% ± 5 mA) per ºC.
Slew Rate Range:
0·1 A/V per s to 10 A/V per ms.
Minimum transition time:
150 µs.
Pulse Repetition Rate:
Adjustable from 0·01Hz (100 seconds) to 10kHz.
Pulse Duty Cycle:
1% to 99% (percentage of period at Level A).
Setting Accuracy:
±1 %
Setting Accuracy:
± 10% (on linear part of slope, excluding high frequency aberrations).
Variation in Level Settings:
± 5 digits of specified setting resolution for present mode and range.
internal transient generator.
Isolation:
CATII (300V) to load negative.
Setting Accuracy:
± 2% ± 200 mV.
Volts & Amps:
Measured values of current through and voltage across the load.
Watt & Ohms:
Power and equivalent load resistance, calculated from Volts and Amps.
Voltage Accuracy:
± 0·1% ± 0.02%FS.
Current Accuracy:
± 0·2% ± 0.04%FS.
Constant Conductance Mode (CG)
(1)
(2)
TRANSIENT CONTROL
Transient Generator
Slew Rate Control
The slew rate control applies to all changes of level whether caused by manual selection, remote
control or the transient generator.
The level change is a linear slew between the two level settings. The range available in each
mode is shown above.
Oscillator Sync Output
Connection: Terminal block on rear panel. Lo terminal output grounded to chassis
DROPOUT VOLTAGE
The load will cease to conduct if the applied voltage falls below the Dropout Voltage setting;
active in all modes. The Dropout Voltage setting is also the threshold for the Slow Start facility
and acts as an offset voltage in Constant Resistance mode.
Slow Start
If Slow Start is enabled, the load will not conduct any current until the source voltage reaches the
Dropout Voltage setting; it will then ramp the controlled variable up (in CC, CP and CG modes) or
down (in CR mode) to the Level setting at a rate determined by the Slew Rate setting.
METER SPECIFICATIONS
Display Type: 256 x112 pixel graphic LCD with white LED backlight.
Measured Values
internally. TTL/CMOS (5V) output. High during Level B phase of
4
Page 6

Output Terminals:
BNC (chassis ground) on front panel or terminal block on rear panel.
Output Impedance:
600Ω nominal, for >1MΩ load (e.g. oscilloscope).
Scaling:
250mV per Amp (4 Volts full scale).
Accuracy:
± 0·5% ± 5mV.
Isolation:
CATII (300V) to load negative.
Bandwidth limit (-3dB):
40kHz.
1.4 LXI Core 2011 compliant.
USB:
Standard USB 2.0 connection. Operates as virtual COM port.
Capabilities: SH1, AH1, T6, L4, SR1, RL2, PP1, DC1, DT0, C0, E2.
RS232:
Standard 9-pin D connection. Baud rate: 9600.
internally.
Input Impedance:
10kΩ. Input protected against excess input voltages up to 50V.
Isolation:
CATII (300V) to load negative.
Operating Mode:
The applied voltage sets the operating level within the range.
Scaling:
4 Volts full scale (250mV per Amp).
Accuracy:
± 2% ± accuracy of range.
Common mode rejection:
Typically better than –76dB.
Operating Mode:
The applied signal selects between Level A and Level B settings.
Threshold:
+ 1·5V nominal. A logic high selects Level B.
Input to the LED of an opto-isolator through 1kΩ resistor.
Threshold:
Apply >+3V to disable the load input. Max. Voltage 12V.
CURRENT MONITOR OUTPUT
REMOTE CONTROL
Digital Remote Interfaces
The unit provides LAN, USB, GPIB and RS232 interfaces for full remote control.
LAN:
GPIB: Conforming to IEEE488.1 and IEEE488.2.
Ethernet 100/10base-T connection with auto cross-over detection.
External Control Input Characteristics
Connection: Terminal block on rear panel. Lo terminal input grounded to chassis
External Analogue Voltage Control
External Logic Level (TTL) Control
Remote Disable Input
Connection: Terminal block on rear panel.
5
Page 7

will trip into the fault state at 460 Watts.
Protection Current:
The input is disabled if the measured current exceeds a user set limit.
reverse polarity.
Protection Voltage:
The input is disabled if the measured voltage exceeds a user set limit.
suppressors will start to conduct at typically 800V ± 20%.
safe levels.
currents that exceed 20A.
AC Input:
110V–120V or 220V–240V AC ±10%, 50/60Hz. Installation Category II.
Power Consumption:
40VA max. Mains lead rating: 6A minimum.
Operating Range:
+ 5ºC to + 40ºC, 20% to 80% RH.
Storage Range:
– 40ºC to + 70ºC.
Environmental:
Indoor use at altitudes up to 2000m, Pollution Degree 2.
Cooling:
Variable speed fan. Air exit at rear.
Safety:
Complies with EN61010-1.
EMC:
Complies with EN61326.
Size:
130mm H (3U) x 212mm W (½ rack) x 435mm D.
Weight:
5.7 kg.
Option:
19-inch rack mount kit.
PROTECTION
Excess Power: The unit will attempt to limit the power to 430 Watts; if this fails the unit
Excess Current: The unit will trip into the fault state at nominally 20 Amps.
Excess Voltage: The unit will conduct a current pulse (to absorb inductively generated
Temperature: The unit will trip into the fault state if the Mosfet temperature exceeds
Reverse Polarity: The unit will trip into the fault state if a reverse current is drawn that
The unit is protected by fuses that protect the unit against currents that
exceed 20A. This is primarily as a protection against high power sources
with a current capability of >20A being connected to the load with
spikes) for 1ms at about 510V.
The unit will trip into the fault state at nominally 530V. Surge
exceeds 200mA. The unit is protected fuses that protect the unit against
GENERAL
Specification Notes
(1)
Slew Rate Ranges refer to the theoretical slope of the transition between two levels, regardless
of whether that transition can be achieved when taking into account the level difference, the set
transition duration, the minimum transition time, and the characteristics of the source.
(2)
Minimum Transition Time specification is an indication of the fastest available transition using a
benign source and low inductance connections, with a minimum terminal voltage of 25V and a
minimum current of 200mA. The actual performance attainable with electronically regulated
power supplies depends on the combination of source and load loop bandwidths and
interconnection inductance.
6
Page 8

2. Sécurité
Cet instrument est conforme à la classe de sécurité 1 de la classification CEI et il a été conçu
pour satisfaire aux exigences de la norme EN61010-1 (Exigences de sécurité pour les
équipements électriques de mesure, de contrôle et d'utilisation en laboratoire). Il s'agit d'un
instrument de catégorie II d'installation prévu pour un fonctionnement à partir d’une alimentation
monophasée standard.
Cet instrument a été testé conformément à la norme EN61010-1 et il a été fourni en état de
sécurité d’utilisation. Le présent manuel d'instructions contient des informations et des
avertissements que l'utilisateur doit suivre afin d'assurer une utilisation sans danger et de
conserver l'appareil dans un parfait état de sécurité d’utilisation.
Cet instrument a été conçu pour être utilisé en intérieur, en environnement de pollution de
deuxième degré à des plages de températures allant de 5 à 40 °C, et à des taux d'humidité
compris entre 20 et 80 % (sans condensation). Il peut être soumis de temps à autre à des
températures comprises entre +5 et -10 °C sans dégradation de sa sécurité. Ne pas le faire
fonctionner en présence de condensation.
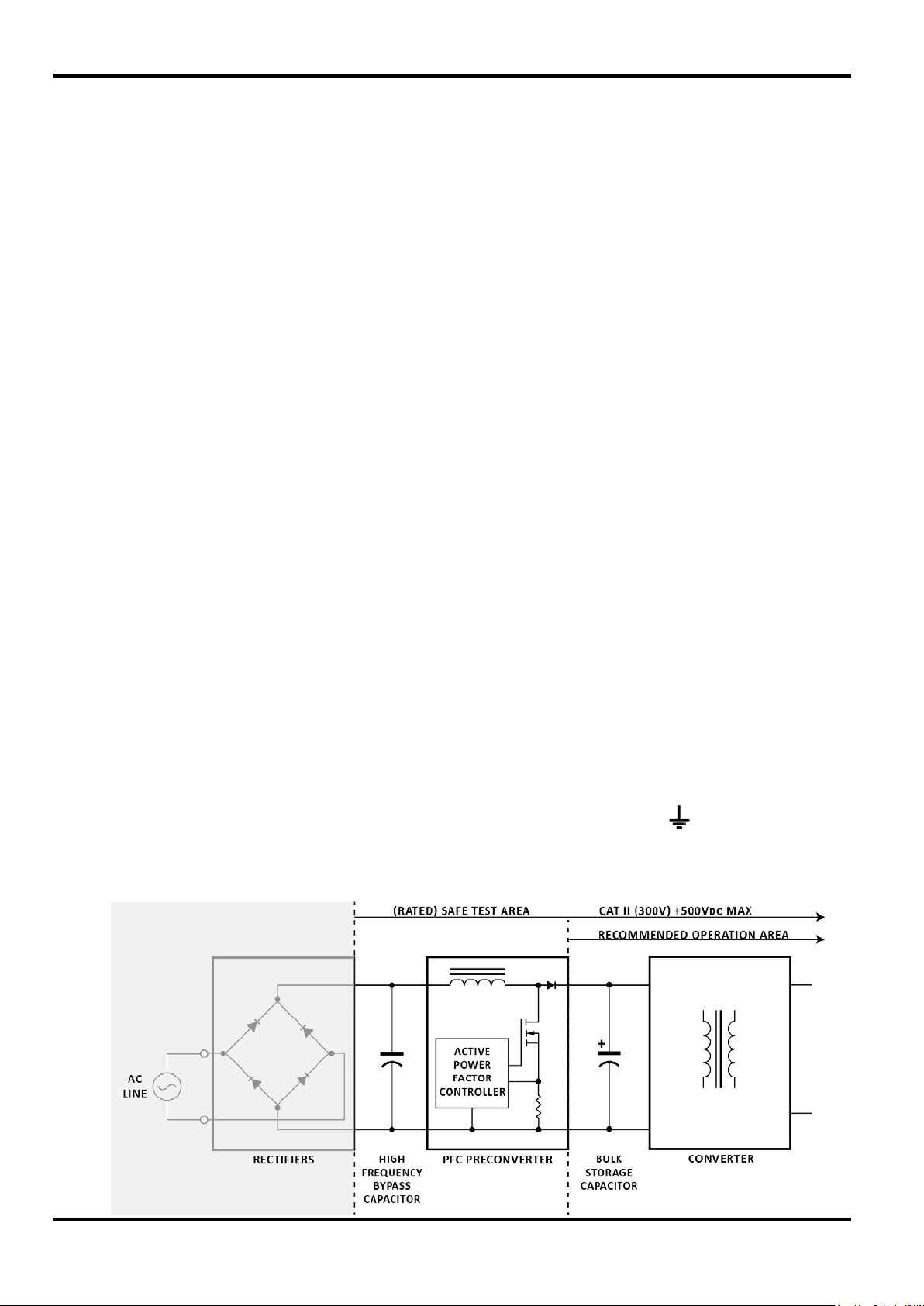
Il a été conçu pour une utilisation de CAT II (Catégorie de mesure et surtension II) jusqu’à
300 V
équipements et appareils portatifs.
Pour ce type d’équipements, 2 500 V est la surtension transitoire de crête maximum pouvant être
tolérée par toute borne d’entrée de charge isolée de la masse sans affecter la sécurité de
l’appareil.
CAT II correspond au niveau d’alimentation domestique locale, et se rapporte aux
rms
L’utilisation de cet appareil d’une manière non spécifiée par les présentes instructions risque
d'affecter la protection de sécurité fournie.
Ne pas utiliser l'instrument hors des plages de tension d'alimentation nominale recommandées ni
hors de ses tolérances d'environnement.
AVERTISSEMENT ! CET INSTRUMENT DOI T ÊTRE RELIÉ À LA TERRE
Toute interruption du conducteur de terre du secteur à l'intérieur ou à l'extérieur de l'instrument
rendra l'instrument dangereux. Une interruption intentionnelle est interdite. La sécurité de
l'instrument ne doit pas être annulée par l'utilisation de rallonge sans conducteur de protection.
Lorsque l'instrument est relié au secteur, il est possible que les bornes soient sous tension :
l'ouverture des couvercles ou la dépose de pièces (à l'exception des pièces accessibles
manuellement) risque de mettre à découvert des pièces sous tension. L'instrument doit être
débranché de toute source d'alimentation avant d’être ouvert pour un réglage, un remplacement,
des travaux d'entretien ou de réparations quelconque(s).
Éviter dans la mesure du possible d'effectuer des réglages, des travaux de réparations ou
d'entretien lorsque l'instrument ouvert est branché au secteur. Si cela s'avère toutefois
indispensable, seul un technicien compétent connaissant les risques encourus doit effectuer ce
genre de travaux.
S'il est évident que l'instrument est défectueux, qu'il a été soumis à des dommages mécaniques
ou exposé à une humidité excessive ou à une corrosion chimique, la protection de sécurité en
sera affaiblie, et l'instrument ne doit pas être utilisé et renvoyé pour être vérifié et réparé.
L’instrument contient à la fois des fusibles encapsulés et des fusibles thermiques sans
réenclenchement; ceux-ci ne peuvent pas être remplacés par l’utilisateur. Le court-circuitage de
ces dispositifs de protection est interdit.
Ne pas mouiller l'instrument lors de son nettoyage.
Les symboles suivants figurent sur l'instrument ainsi que dans le présent manuel. –
Avertissement se reporter à la documentation jointe,
une mauvaise utilisation peut endommager l'instrument.
Courant alternatif.
Alimentation secteur OFF (arrêt)
7
CAT II
l
Catégorie de mesure
et surtension II (300 V)
Masse du châssis.
Alimentation secteur
ON (marche)
Page 9
3. Installation
3.1 Tension de fonctionnem ent secteur
La tension de fonctionnement de l’instrument est indiquée sur le panneau arrière. S’il s’avère
nécessaire de changer la tension de fonctionnement de 230 à 115 V ou vice versa, procéder de
la manière suivante :
1. Débrancher l’instrument de toutes les sources de tension, y compris le secteur et toutes
les arrivées.
2. Enlever les vis qui retiennent le boîtier supérieur au châssis et retirer ce dernier.
3. Débrancher les raccords de câble de l'alimentation du circuit imprimé (ne pas tirer sur les
câbles).
4. Retirer les cinq écrous qui maintiennent l'alimentation du circuit imprimé en place et la
dégager des goujons.
5. Installer les connexions soudées (le long des transformateurs) pour la tension de
fonctionnement requise :
Pour le 230 V, installer uniquement LK2 et LK5
Pour le 115 V, installer uniquement LK1, LK3, LK4 et LK6
Ces connexions peuvent être soit des fils de cuivre étamé, soit des résistances zéro-ohm.
6. Réinstaller l’alimentation du circuit imprimé tout en veillant à ce que les câbles ne soient
pas coincés. Vérifier que tous les câbles sont correctement connectés et que les cinq
écrous sont suffisamment serrés.
7. Remettre le boîtier supérieur en place.
8. Pour respecter les exigences standards de sécurité, la tension de fonctionnement
mentionnée sur le panneau arrière doit être modifiée pour indiquer clairement le nouveau
réglage de la tension.
3.2 Câble d’alimentation secteur
Brancher l’instrument sur l’alimentation CA à l’aide du câble d’alimentation fourni. S’il s’avère
nécessaire d’utiliser une fiche secteur destinée à un autre type de prise murale, utiliser un câble
secteur à trois fils correctement dimensionné et homologué muni de la fiche murale voulue et
d’un connecteur IEC60320 C13 du côté de l’instrument. Cet instrument nécessite un câble
nominal de 6 A pour toutes les tensions d'alimentation secteur.
AVERTISSEMENT ! CET INSTRUMENT DOI T ÊTRE RELIÉ À LA TERRE
Toute interruption du conducteur de terre du secteur à l'intérieur ou à l'extérieur de l'instrument
rendra l'instrument dangereux. Une interruption intentionnelle est interdite.
3.3 Montage
Cet instrument est adapté pour être utilisé sur banc ou en baie. Il est livré avec des pieds pour
être monté sur banc. Les pieds avants comprennent un dispositif de basculement pour obtenir un
angle optimal du panneau.
Un kit de montage en baie pour installer une ou deux de ces unités de hauteur 3U de demilargeur est disponible chez les fabricants ou leurs agents à l’étranger : une pièce d’obturation est
également disponible pour les positions non utilisées de la baie.
3.4 Ventilation
L’unité est refroidie par un ventilateur à vitesse variable qui ventile à l’arrière. Prendre soin de ne
pas obstruer les entrées d’air des panneaux supérieur, latéraux ou inférieur ou de la sortie à
l’arrière. Dans les situations montées en baie, laisser suffisamment d’espace autour de
l’instrument et/ou utiliser un ventilateur pour un refroidissement forcé.
8
Si un gainage est appliqué à la sortie d’air, une extraction supplémentaire est requise.
Page 10
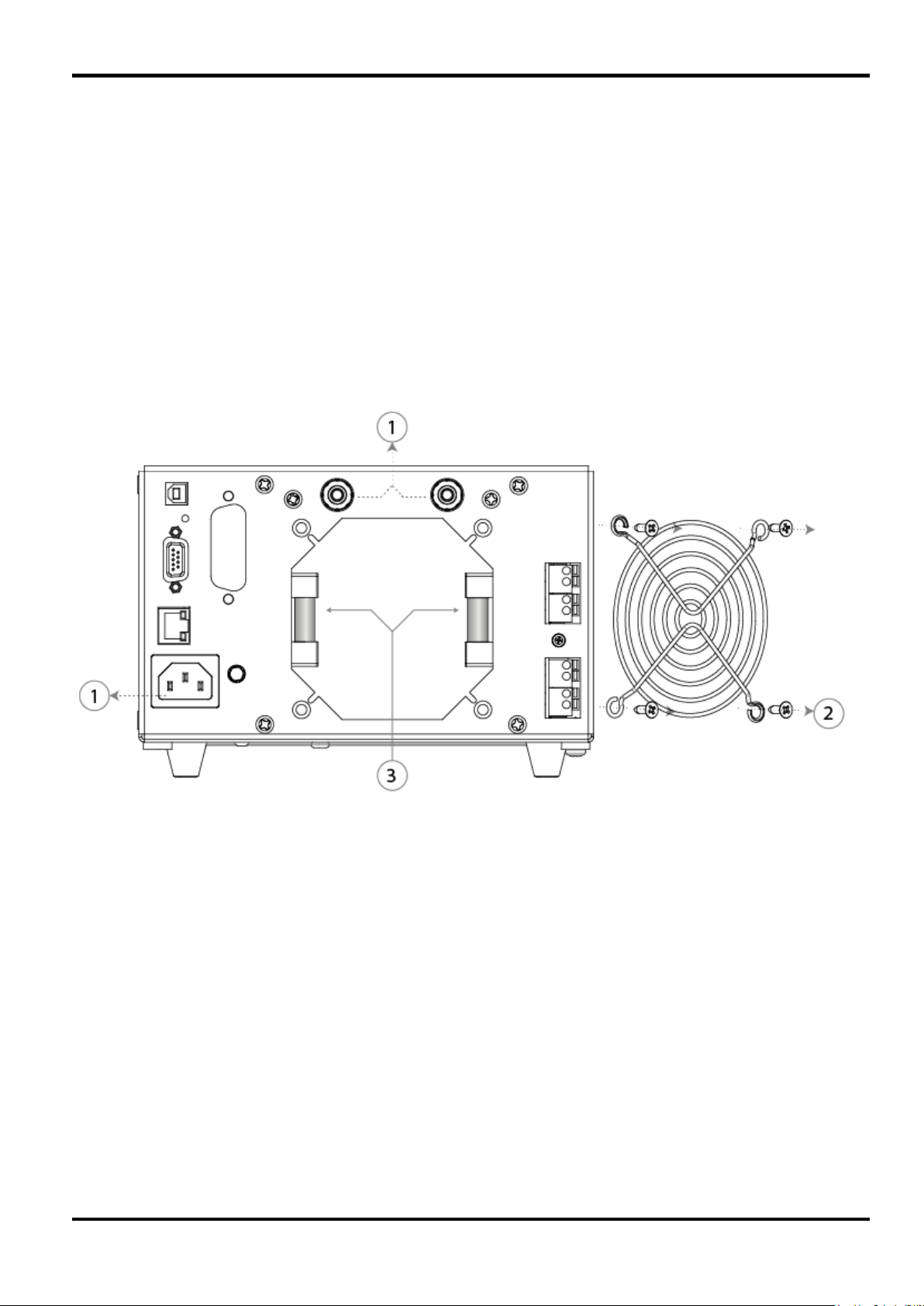
3.5 Fusibles
L’unité est protégée par deux fusibles de 10 A qui la protègent contre les courants supérieurs à
20 A. Il s’agit principalement d’une protection contre les sources à haute puissance dotées d’une
capacité en courant de > 20 A connectée à la charge avec une polarité inverse. Avant de
remplacer ce fusible, assurez-vous que l’instrument est débranché de toute source de tension.
Le fusible de rechange doit être un fusible HRC de 10 A pour 1 000 V
Pour remplacer un fusible:
1. Débrancher l’instrument de toutes les sources de tension.
2. Déposer les vis maintenant la grille du ventilateur.
3. Remplacer le fusible avec un autre de taille et de spécifications identiques.
4. Reposer et bien attacher la grille de ventilateur.
mesurant 10 x 38 mm.
CC
3.5.1 Fusible du câble d’alimentation CA interne
Le transformateur d’alimentation CA sur la carte à PSU PCB est protégé contre une panne
interne par un fusible thermique non réinitialisable. Pour éviter tout déclenchement accidentel du
fusible thermique en branchant une alimentation de 230 V quand l’instrument est réglé pour un
fonctionnement sur 115 V, un fusible standard de 500 mA (T) 250 V est posé à la position FS6 sur
la carte à PSU PCB. S’il est nécessaire de procéder au remplacement du fusible suite à un tel
événement, déposer le couvercle supérieur du boîtier et remplacer le fusible en suivant les
instructions relatives à la « Tension secteur » de la section 3.1.
9
Page 11
L’unité contient un fusible dans le circuit de charge, Voir la section 3.5
4. Connexions
4.1 Connexions du panneau avant
4.1.1 Entrée de charge
Les bornes d’INPUT (entrée) pour le circuit de charge sur le panneau avant acceptent des
broches de 4 mm. Leur courant maximal est de 16 Amps.
Ne pas utiliser les bornes des panneaux avant et arrière simultanément.
L’installation de câblage et les connexions doivent être en mesure de supporter le courant requis.
Le circuit de charge est isolé de la terre, avec une cote de CAT II (300 V), mais il est essentiel de
respecter une pratique d’isolation sécurisée.
Vérifier que la source est connectée avec la polarité adéquate.
Le courant maximal dans ces bornes est de 16 Amps.
La tension maximale autorisée à travers la charge est de 500 Volts.
L’unité contient un fusible dans le circuit de charge Voir la section 3.5
4.1.2 Sortie du courant moniteur
Les bornes du courant moniteur fournissent une tension proportionnelle à la charge de courant
sortant avec un facteur d’échelle de 250 mV par Amp (4 Volts pour 16 Amps de crête).
L’impédance de sortie est de 600 Ω nominal et la calibration assume une charge d’impédance
élevée comme pour un oscilloscope.
Le circuit du moniteur de courant est relié à la masse du châssis et donc isolé du
circuit de charge avec une cote de CAT II (300 V).
4.2 Connexions du panneau arrière
4.2.1 Entrée de charge
Les bornes d’INPUT pour le circuit de charge sur le panneau arrière acceptent des broches de
4 mm. Leur courant maximal est de 16 Amps.
Ne pas utiliser les bornes des panneaux avant et arrière simultanément.
L’installation de câblage et les connexions doivent être en mesure de supporter le courant requis.
Le circuit de charge est isolé de la terre, avec une cote de CAT II (300 V), mais il est essentiel de
respecter une pratique d’isolation sécurisée.
Vérifier que la source est connectée avec la polarité adéquate.
Le courant maximal dans ces bornes est de 16 Amps.
La tension maximale autorisée à travers la charge est de 500 Volts.
4.2.2 Borniers
Toutes les autres connexions du panneau arrière sont faites via des bornes sans vis. Pour
effectuer des connexions sur les bornes, utiliser un tournevis plat pour appuyer sur l’actionneur
orange à ressort vers l’intérieur pour ouvrir l’attache fil : insérer l’extrémité du fil complètement
dans l’orifice et relâcher l’actionneur. S’assurer que le fil est correctement saisi. Prendre soin de
respecter la polarité mentionnée.
4.2.2.1 Sortie du courant moniteur
La paire supérieure de bornes, libellée CURRENT MONITOR (courant moniteur), fournit la sortie
du courant moniteur. Elles sont câblées en parallèle avec les prises du courant moniteur du
panneau avant et les mêmes exigences s’appliquent, voir ci-dessus.
10
Page 12
entrées sont protégées contre toute surtension d’entrée jusqu’à 50 V.
4.2.2.2 Entrée de la tension de contrôle à distance
Les bornes de CONTROL VOLTAGE (tension de contrôle) sont utilisées dans les deux modes de
fonctionnement de l’instrument :
En mode EXTERNAL VOLTAGE (tension externe), un signal analogue appliqué ici détermine le
niveau de la charge ; l’échelle est de 4 Volts maximum.
En mode EXTERNAL TTL (TTL externe), un signal logique appliqué ici sélectionne soit le réglage
du LEVEL A (niveau A) ( logique basse), soit le réglage du LEVEL B (niveau B) (logique élevée).
Le seuil de commutation est nominalement de +1,5 V.
Ces bornes sont reliées à la masse du châssis. Impédance d’entrée de 10 kΩ. . Les
4.2.2.3 Sortie synchronisée de l’oscillateur
La SYNC OUTPUT (sortie synchronisée) est une TTL/CMOS (5 V) ouverte actionnée par le
signal d’un oscillateur interne. Cette sortie est reliée à la masse du châssis. Une résistance en
série de protection de 1 kΩ est présente.
4.2.3 Connexions du contrôle à distance numérique
Le modèle LDH400P fournit les fonctions d'un contrôle à distance complet via les interfaces LAN,
USB, GPIB et RS232 standards. Toutes sont isolées des bornes d'entrée de charge de l'unité.
Les interfaces USB, GPIB et RS232 sont reliés à la masse du châssis, et il faut éviter d'introduire
des boucles de terre. L'interface LAN est isolée par des transformateurs de réseau standard.
Tous les détails sont donnés dans le chapitre « Configuration de l'interface à distance » Voir la
section 9.
4.3 Protection contre le courant d’erreur éventuelle
Cette unité n'est pas prévue d'agir comme dispositif de protection contre les surintensités pour la
source testée. Cependant, l’instrument contient deux fusibles HRC de 10 A pour 1 000 V qui
protège l’unité contre les intensités supérieures à 20 A. Il s’agit principalement d’une protection
contre les sources à haute puissance dotées d’une capacité en courant de > 20 A connectée à la
charge avec une polarité inverse. Néanmoins, elle protègera également l’unité contre tout courant
de défaut éventuel > 20 A.
11
Page 13
5. Première utilisation
Cet instrument fournit une charge CC contrôlable (un collecteur de tension) destinée à tester
toutes les formes d’alimentation électrique CC, y compris les PFCs, les batteries, les cellules
photo-voltaïques, les piles à combustible, les turbines et les générateurs ainsi que les unités
d’alimentation électronique.
5.1 Organisation du présent manuel
Les paragraphes qui suivent sont destinés à présenter brièvement les caractéristiques
particulières de cet instrument et la terminologie utilisée dans ce manuel. Plus de détails
techniques sont donnés dans les chapitres suivants du manuel.
Le chapitre suivant décrit le fonctionnement général du panneau avant et son affichage, suivi des
instructions complètes pour le réglage de chaque paramètre. Un court chapitre décrit ensuite les
fonctionnalités de contrôle à distance analogique, y compris la sélection de niveau par un signal
de niveau logique.
Suivi d’un chapitre donnant quelques notes d'application et les détails de l'implémentation, qui
donnent plus d'informations sur certaines difficultés pratiques qui peuvent occasionnellement être
rencontrées dans chaque mode de fonctionnement, ainsi que quelques conseils sur les stratégies
d'atténuation.
Pour finir, les interfaces de contrôle à distance numérique et le jeu de commandes du LDH400P
seront présentés.
5.1.1 Modes de charge
L’étape de dissipation de puissance dans cette charge est fondamentalement un contrôleur de
courant réglable, qui dirige un courant qui ne dépend pas de la tension appliquée présentement
en provenance de la source en cours d'étude. Ceci est dénommé fonctionnement de courant
constant.
Un multiplicateur analogique sert à pourvoir d'autres modes de fonctionnement dans lesquels le
courant dépend de la tension appliquée d'une manière connue, qui offre un choix de
caractéristiques de puissance constante, de résistance constante ou de conductance constante.
5.1.2 Fonctionnement constant et transitoire
La charge offre deux réglages de niveau indépendants, appelés niveau A et niveau B. Deux
touches libellées A et B dans la section LEVEL SELECT (sélection du niveau) du panneau avant
permettent de déterminer lequel des niveaux est actif.
Les modifications transitoires de l'ampleur de la charge sont générées par la commutation entre
les deux niveaux. La transition entre les deux est une ligne droite à une vitesse de balayage qui
est spécifiée par l'utilisateur. La commutation entre les deux niveaux peut être contrôlée soit par
un oscillateur interne à fonctionnement transitoire, qui a une fréquence et un cycle de service
réglables, soit par un signal logique externe (niveau TTL).
Il n'y a aucune restriction sur l’ampleur des deux niveaux.
5.1.3 Tension de mise au repos
Le but premier de la fonctionnalité de mise au repos est de protéger les batteries contre une
décharge excessive. Lorsque la tension de la source chute au-dessous du paramètre de seuil de
tension de mise au repos, la charge réduira le courant utilisé, éventuellement à zéro. Il s'agit
d'une limite dynamique, pas d’un état de verrouillage, donc si la tension de la source remonte audessus du seuil (comme le font souvent les batteries), la charge reconduira de nouveau le
courant.
12
Page 14

5.1.4 Démarrage lent
La fonctionnalité de démarrage lent permet au courant pris par la charge de s’élever lentement,
au taux déterminé par le paramètre de la vitesse de balayage, lorsque la charge est activée ou
lorsque la tension de la source dépasse le paramètre de seuil de tension de mise au repos. Elle
provoque également la chute du courant à la même vitesse que lorsque l'entrée de la charge est
désactivée. Cette fonctionnalité est particulièrement utile en mode Constant Power (puissance
constante), pour éviter un phénomène de verrouillage lors du démarrage de la source ; voir le
chapitre « Notes d’application » section 8.
5.1.5 Conditions de limite de tension et de courant
L'unité possède une fonctionnalité qui permet à l'utilisateur de spécifier des limites sur la valeur
mesurée permise de tension ou de courant. Si l’une ou l'autre de ces limites est dépassée,
l'entrée est alors désactivée.
5.1.6 Limite de puissance
L’unité surveille en permanence la dissipation de la puissance interne et varie la vitesse du
ventilateur en conséquence. Si la dissipation s’élève au-dessus d’environ 430 Watts, un circuit de
limitation de puissance se déclenche et tente d’imposer au courant de la charge de contrôler la
dissipation. L’unité fonctionne alors en mode non linéaire, ce qui modifiera les conditions de
stabilité. Si le circuit de limitation de puissance ne parvient pas à empêcher l’élévation du courant
au-dessus d'un seuil de défaut légèrement plus élevé (peut-être à cause de l'instabilité), le
détecteur de défaut se déclenche alors et la charge cesse de se produire.
5.1.7 Voyants de condition d’entrée
Deux voyants situés au-dessus de la touche Enable (activation) dans la section Input (entrée)
indiquent l'état de fonctionnement de l'unité. Ils sont tous les deux éteints quand l’entrée est
désactivée. Le voyant vert s'allume lorsque l'entrée est activée et si la charge fonctionne
normalement alors le voyant jaune n'est pas allumé.
Le voyant jaune s’allume si la charge ne peut pas conduire le courant requis, avec un message
sur la ligne de statut en haut à droite de l'affichage faisant la distinction entre les trois raisons
possibles :
• Limite de puissance: le circuit de limitation de puissance fonctionne comme décrit cidessus.
• Mise au repos : la tension appliquée de la source est au-dessous du paramètre de la
tension de mise au repos.
• Basse tension : l'étage de puissance est dans la condition de résistance minimale, car la
tension disponible de la source ne suffit pas à maintenir le niveau de courant requis.
La condition de résistance minimale se produit soit si la source est mise hors tension et ne fournit
aucune tension, soit si la chute de tension dans les conducteurs de la connexion provoque la
tension d'entrée actuelle à la charge d’être au-dessous de son niveau de fonctionnement
minimum. Noter que si la tension de la source est soudainement appliquée quand le circuit de
charge est dans cet état, il se produira alors probablement un courant transitoire.
Si le voyant jaune est uniquement allumé et que le voyant vert est éteint, il existe alors une
anomalie persistante.
13
Page 15
5.1.8 Conditions d’erreur
L’unité détecte (côté matériel) les conditions d’erreur suivantes :
• Courant au-dessus de 20 Amps.
• Puissance excessive d’environ 450 Watts (que le circuit de limitation de puissance n’a pas
réussi à contrôler au seuil inférieur comme décrit ci-dessus).
• Tension supérieure à environ 530 Volts.
• Polarité inverse (courant supérieur à 200 mA).
• Température excessive du dissipateur thermique.
• Panne de ventilateur.
Les détecteurs d’erreurs pour excès de courant, de puissance et de tension ont des réseaux filtre
avec une constante de temps de quelques millisecondes pour permettre le traitement des brèves
transitions.
Quand l’une de ces situations d’erreur se produit, l’entrée est mise hors tension, l’unité cesse
alors de conduire le courant et un message d’erreur s’affiche. La situation d’excès de courant ou
d’alimentation disparaît dès que l'entrée est désactivée, mais une des autres conditions allumera
le voyant jaune uniquement et affichera le message Fault (erreur) sur la ligne de statut, jusqu'à
ce que la condition en question soit réglée.
5.2 Raccordement de la charge à la source
Les bornes d’INPUT (entrée) de la charge doivent être connectées à la source à tester en
utilisant une résistance suffisamment faible et des connexions à faible induction. Une inductance
dans l'interconnexion peut avoir des incidences négatives importantes sur la stabilité de la source
et la combinaison de charge. Le câblage doit être aussi court et épais que possible. Il est
essentiel que la chute de tension dans les conducteurs de raccordement soit suffisamment
inférieure à la tension de la source pour laisser suffisamment de tension de service dans
l'ensemble de la charge.
Les bornes d’entrée de charge de l’instrument sont isolées de la masse et sont classées dans la
CAT II jusqu’à 300 V. Une connexion à un circuit d’alimentation secteur à courant alternatif, à un
courant continu du côté primaire ou à un pont redresseur non isolé est autorisée sur la borne
d’entrée négative, avec une limite de tension de 500 V
borne d’entrée négative.
Il est également interdit d’inverser la polarité des entrées.
La tension maximale autorisée entre la borne d'entrée négative et la terre est de 425V (crête
de CAT II 300V).
Assurez-vous que tous les fils sont correctement isolés pour la tension de travail impliquée.
entre la borne d’entrée positive et la
CC
14
Page 16
5.2.1 Courant de fuite éventuel
L'instrument détecte toute anomalie et répond en désactivant la charge en mettant les appareils
hors tension. En dernier recours, il y a des fusibles internes dans le circuit de charge. Ainsi, si la
source externe applique une condition dépassant largement le courant nominal de l’unité, les
fusibles empêcheront la destruction des FET d’alimentation.
5.2.2 Désactivation de l’entrée à distance
Cette entrée est fournie pour le surpassement à distance de la fonction INPUT ENABLE
(activation d’entrée) de la charge, peut-être pour des raisons de sécurité. Elle est disponible dans
tous les modes de fonctionnement. Il s’agit d’une entrée entièrement flottante pour un isolateur
optique : appliquer 3 à 12 V ol ts (en respectant la polarité) pour désactiver la charge. La charge
n’est désactivée que si ce signal est absent et que l’entrée a été activée par les commandes du
panneau avant.
5.3 Mise sous tensio n
L’interrupteur POWER (alimentation) se trouve en bas à gauche du panneau avant. Avant
d’appuyer sur (
panneau arrière) est adaptée à l’alimentation locale. Après la mise sous tension (
doit s’allumer et afficher les informations concernant la version du micrologiciel. Éviter la mise
hors tension jusqu'à ce que l'instrument soit entièrement initialisé et que l'écran d'accueil
apparaisse.
l ), vérifier que la tension de fonctionnement en ligne de l’unité (indiquée sur le
l ), l'écran LCD
15
Page 17
6. Utilisation du panneau avant
Dans le présent manuel, le libellé du panneau avant est indiqué de la manière qu’il apparaît, en
lettres majuscules, par ex. LEVEL SELECT (sélection du niveau). L’intitulé des touches
individuelles est indiqué en caractères gras, par ex.
programmation bleues sont désignées par leur fonction actuelle, telles qu’elles apparaissent sur
la ligne du bas de l'écran, indiquées en gras et en italique, par ex. Limits (limites). Le texte ou les
messages affichés sur l'écran LCD sont indiqués en caractères gras, par ex. Enabled (activé),
Utilities (utilita ires).
Transient (transitoire), et les touches de
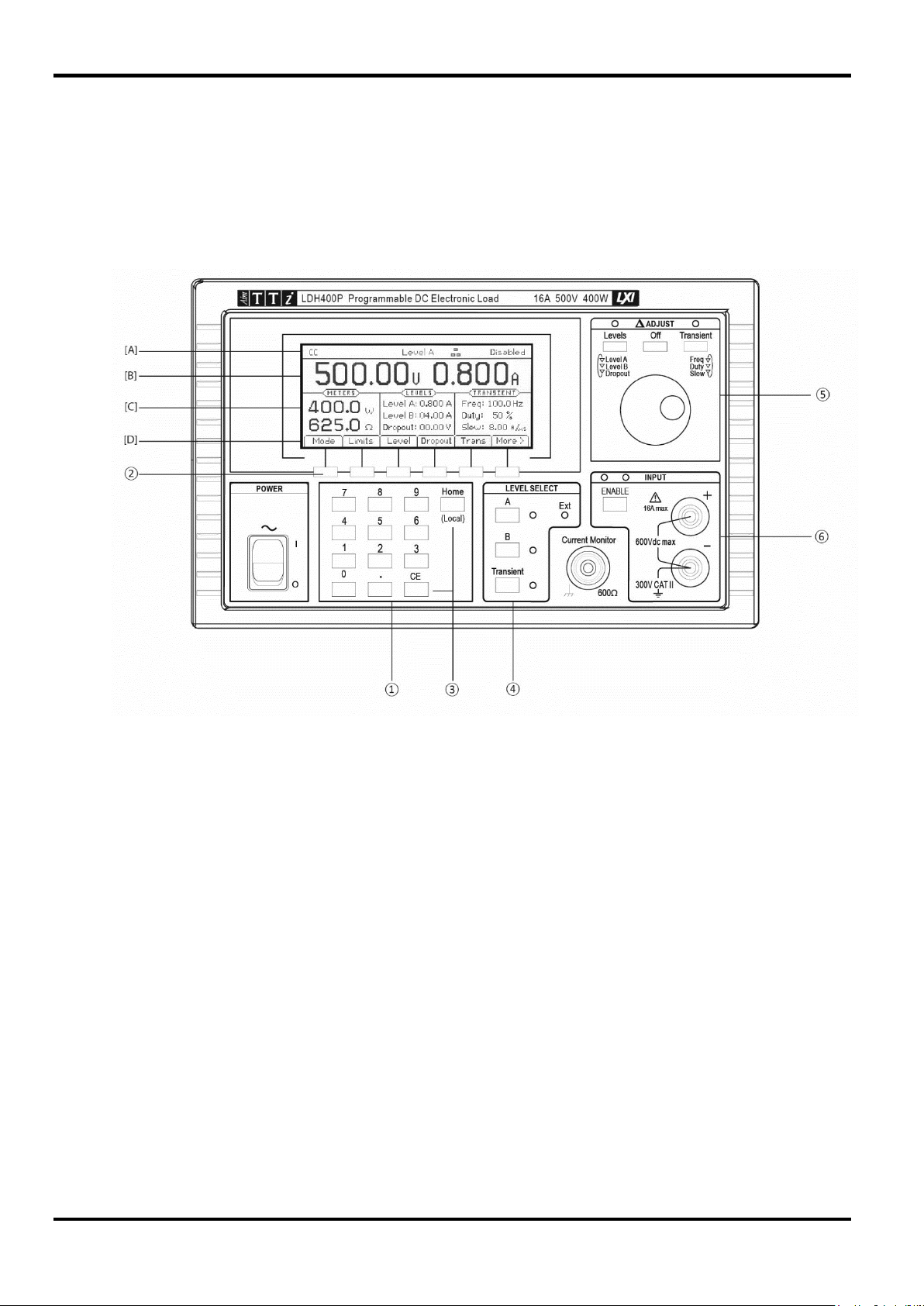
6.1 Touches et Δ Ajust (ajuster)
Les touches du panneau avant sont divisées en quatre sections :
① Les touches numériques
② Les touches bleues sous l’écran, utilisées pour configurer l’instrument par le biais de la
structure de menus, voir la section 6.2.4.
③ La touche CE : annule la dernière frappe numérique tandis que la touche Home (accueil)
annule une sélection entière de menus et retourne à l’écran d’accueil. La touche
utilisée pour la demande de « retour local » à partir du contrôle à distance numérique.
④ Les trois touches de LEVEL SELECT (sélection du niveau) (
lequel des deux réglages de niveau est actif, ou engage le mode transitoire qui passe d’un niveau
à l’autre. Les voyants associés indiquent lequel des statuts actuellement est actif ; ces touches
servent également à revenir du contrôle analogique externe à la sélection manuelle.
⑤ La molette de Δ ADJUST (ajuster) et ses trois touches associées (Levels (niveaux), Off (hors
tension) et Transient (transitoire)) servent à choisir et à modifier la valeur existante de l'un des
paramètres numériques de l'instrument.
⑥ La touche ENABLE (activer) dans la section INPUT (entrée) [dénommée touche INPUT
ENABLE (activation d’entrée)] contrôle la charge, et sa saisie alternée permet de passer de la
condition conducteur à celle de non-conducteur. Le voyant vert indique si l'entrée est activée ; le
voyant jaune indique si l'étage de puissance est saturé, comme décrit dans le paragraphe
« Voyants de condition d'entrée » dans la section « Première utilisation » » Voir la section 5.1.7.
Home est aussi
A, B et Transient) déterminent
16
Page 18

6.2 Affichage et écran d'accueil
Tous les réglages de paramètres et la lecture des mesures s’affichent sur l’écran à cristaux
liquides rétro-éclairé (LCD). Lors de la mise sous tension, l'instrument affiche en premier l'écran
d'accueil qui est l'affichage normal pendant le fonctionnement de l'unité. Cet écran affiche toutes
les lectures de mesure de la charge et les paramètres de la charge les plus importants tels que
décrits ci-dessous, et il est également le niveau supérieur de la structure de menu actionné par
touches programmables. L'affichage change pour afficher les autres écrans lors des sélections
pour saisir les valeurs de paramètre et retourner ensuite à l'écran d'accueil une fois la saisie
terminée.
6.2.1 [A] Ligne de statut
La ligne de statut de l'instrument est visible le long du haut de l'écran en tout temps, sauf lorsque
l'un des menus sauvegarde, réinitialisation ou utilitaires est affiché. Elle indique l'état actuel de
l'instrument comme suit (dans l'ordre, de gauche à droite sur l'écran) :
• Le champ de mode de charge indique le mode actuel de la charge – CC, CP, CR, ou CG.
• Slow (lent) s'affiche lorsque l'opération de démarrage lent a été activée.
• Slew (balayage) est affiché en tant qu’avertissement lorsque le réglage actuel de la
vitesse de balayage est trop lent en ce qui concerne la différence de niveau, la fréquence
transitoire et le cycle de service, voir 'Conditions d'erreur de la vitesse de balayage (à la
page 23 ci-dessous).
• Lim (limite) s'affic h e lor sq u e l’une des limites d’intensité ou de tension définies par
l’utilisateur est activée.
• Le champ de sélection de niveau (au centre) indique quel est le niveau d’entrée ou la
méthode de contrôle actuellement sélectionné – Level A, Level B, Transient, Ext V ou
Ext TTL.
• Le champ LAN indique le statut du réseau informatique local (s’il est installé). Quand il n'y
a pas de connexion LAN, le champ affiche . Lorsque le réseau est en cours de
connexion l'indicateur clignote entre et , puis une fois connecté le champ indique .
Voir le chapitre « Configuration de l'interface à distance » pour plus d'informations.
• Le champ de statut d'entrée (à l'extrémité du côté droit) indique la condition d’entrée de la
charge actuelle de l'instrument – Disabled (désactivée), Enabled (activée), Low Voltage
(basse tension), Dropout (mise au repos), Power Limit (limite de puissance) ou Fault
(erreur), comme décrit dans le paragraphe « Voyants de condition d'entrée » (à la page
13) ci-dessus).
6.2.2 [B] Données de l'écran d'accueil
Sous la ligne de statut se trouve l’affichage des mesures qui indiquent la tension actuelle de la
source mesurée et, une fois la charge activée, le courant de la charge.
6.2.3 [C] Données de réglage
Sous cette ligne, l'écran est divisé en trois sections. À gauche, sous la rubrique METERS
(mesures), l’affichage indique la puissance actuelle dans la charge et la rés istance équivalente, ces
valeurs sont calculées à par t ir de la t ension mesurée et des lectures de courant.
affichées indiqueront
des capacités de l'unité.
HIGH (élevé) (ou MAX pour la puissance) si la valeur mesurée est au-delà
Ces mesures
Au centre, sous la rubrique
niveau A et du niveau B (les unités dépendent du mode de fonctionnement) et le réglage de la
tension de mise au repos.
À droite, sous la rubrique
fréquence et le cycle de service de l'oscillateur interne et la vitesse de balayage des transitions.
17
LEVELS (niveaux), l'affichage indique les réglages actuels du
TRANSIENT (transitoire), l'affichage indique les paramètres pour la
Page 19

Mode
Pour sélectionner le mode de fonctionnement.
appliquées.
Niveau
Pour saisir les valeurs numériques pour le niveau A et le niveau B.
Mise au repos
Pour saisir une valeur numérique pour la tension de mise au repos.
transitoire.
réinitialiser
décrit au chapitre « Contrôle à distance analogique ».
pour définir les paramètres des interfaces à distance.
interne.
l'oscillateur interne.
transitions.
Lent
Pour activer ou désactiver le démarrage lent et arrêter la fonctionnalité.
Les six paramètres peuvent être modifiés soit par une saisie numérique directe, soit en utilisant
la molette pour incrémenter ou décrémenter la valeur actuelle, comme décrit ci-dessous.
6.2.4 [D] Touches de programmation
Les touches de programmation sont les six touches bleues qui se trouvent directement sous
l'écran LCD. La fonction de chacune de ces touches change au cours de l’utilisation de l’appareil.
La fonction disponible est indiquée sur la ligne du bas de l'écran dans un onglet au-dessus de
chaque touche. Si les touches n'ont aucune fonctionnalité dans un menu spécifique, l'onglet est
alors abaissé pour indiquer qu'elle est inactive.
Sur l'écran d'accueil, il y a deux jeux de touches de programmation disponibles ; la touche de
droite, libellée en alternance More > or More < (plus > ou plus <) permet de basculer de l’un à
l’autre. Tous les menus supplémentaires sont accessibles via les touches de programmation dans
l’un de ces jeux.
Les principaux paramètres accessibles dans le premier jeu sont :
Limites Pour imposer des seuils limites aux valeurs de tension ou de courant
Transitoire Pour accéder à un deuxième niveau pour définir la fonctionnalité
Le deuxième jeu de touches comprend :
Sauvegarder et
Externe Pour activer ou désactiver le contrôle à distance analogique du niveau
Utilitaires Pour configurer certaines fonctionnalités secondaires de l'instrument et
Le menu de niveau secondaire Transient (transitoire) (lorsqu'il est sélectionné à partir du premier
jeu de touches ci-dessus) comprend :
Fréquence
Service Pour saisir une valeur numérique pour le cycle de service de
Balayage Pour saisir une valeur numérique pour la vitesse de balayage des
Pour installer, revoir et utiliser les paramètres de l'unité sauvegardés.
ou la sélection du niveau logique (TTL) entre les deux niveaux, comme
Pour saisir une valeur numérique pour la fréquence de l'oscillateur
Dans la plupart des menus de niveau inférieur, la touche de gauche, libellée Back ou Cancel
(retour ou annuler), peut être utilisée pour retourner au menu précédent. Ceci permet l'exploration
des divers menus sans risquer de mettre l'unité dans des configurations inattendues. La touche
Back permet de revenir au menu précédent en conservant toutes les modifications qui ont
été apportées au menu actuel, tandis que la touche Cancel (si offert) annulera toute
modification apportée avant de revenir au menu précédent. La touche
retourner directement à l'écran d'accueil et au niveau supérieur de la structure du menu
(abandonnant également toute saisie de valeur incomplète).
18
Home (accueil) permet de
Page 20
6.3 Saisie numérique générale des paramètres
Tous les paramètres de charge modifiables de l'utilisateur peuvent être définis à l'aide du pavé
numérique. Le paramètre recherché est sélectionné en premier dans le menu à l’aide des
touches de programmation. L'affichage change ensuite pour afficher l'écran de saisie de
paramètre qui indique l’intitulé du paramètre, sa valeur actuelle avant d’être éditée et dans la
plupart des cas les limites de l'entrée et la résolution. Un message pour demander la saisie de la
nouvelle valeur apparaît. L'enfoncement de n'importe quelle touche supprime l’invite et le
remplace par la nouvelle valeur en cours de construction, le libellé des touches de
programmation change pour afficher une liste d'unités applicables au paramètre en cours de
modification. La touche
annulée en appuyant sur la touche
Une fois la saisie du chiffre complétée, terminer la modification en appuyant sur la touche de
programmation requise (en choisissant A ou mA, par exemple). La valeur est alors vérifiée par
rapport aux limites du paramètre et, si elle est comprise dans la plage autorisée, elle est
acceptée et appliquée immédiatement comme nouvelle valeur pour ce paramètre. Si la valeur
n’est comprise dans la plage autorisée, un message d'erreur s'affiche et le bruiteur se déclenche.
Le cas échéant, la saisie peut être arrondie pour correspondre à la résolution du paramètre
spécifié.
Les paragraphes ci-dessous décrivent les particularités associées à chaque paramètre.
CE supprime les frappes individuelles ; toute l'entrée peut également être
Home ou sur la touche de programmation Cancel.
6.4 Variation des valeurs de paramètre en utilisant la section Δ Adjust
Les paramètres de niveau et transitoires de la charge peuvent être réglés en incrémentant o u
décrémentant la valeur actuelle à l'aide de la molette ou des touches programmables.
Remarque : ce mécanisme d'ajustement n'est disponible que si l'instrument est sur l'écran
d'accueil.
Deux touches au-dessus de la molette, libellées
permettent de sélectionner le paramètre à modifier et d’initier l'ajustement. Le premier
enfoncement de la touche
presse sélectionne le niveau B et une tr oisième presse sélectionne le réglage de la tension de la
mise au repos. Il est possible, le cas échéant, de répéter le cycle. De même, plusieurs presses
de la touche
de balayage. Un voyant au-dessus de chacune de ces touches clignote durant la période
d'ajustement et quatre touches de curseur s’affichent.
L'affichage de la valeur du paramètre sélectionné est élargie pour remplir sa boîte d'édition, avec
un indicateur de réglage ( ) positionné sous le chiffre à modifier. Il est possible d’utiliser les
touches ◄ et ► pour sélectionner quelle position du chiffre sera ajustée, puis soit la molette,
soit les touches ▲ et ▼ peuvent être utilisées pour incrémenter ou décrémenter la valeur à cet
emplacement. Les chiffres à gauche de celui qui est cours de réglage sont automatiquement
incrémentés ou décrémentés lorsque le point de passage à la dizaine supérieure ou inférieure est
franchi. Les chiffres à droite de celui qui est cours de réglage restent inchangés, à moins qu'un
point de changement de résolution de dizaine soit atteint, dans ce cas les chiffres à droite
peuvent être perdus en raison de la troncature. Si le chiffre le moins significatif est incrémenté et
qu’un changement de résolution de dizaine est atteint, le nouveau chiffre moins significatif est
celui qui est alors ajusté.
Transient permet de sélectionner entre la fréquence, le cycle de service et la vitesse
Levels permet de sélectionner initialement le niveau A ; une deuxième
Levels (niveaux) et Transient (transitoire),
Chaque modification apportée est appliquée immédiatement, tant que la valeur reste dans les
limites permises de ce paramètre. Si une incrémentation ou décrémentation de la position
actuelle dépasse les limites permises, la valeur du paramètre reste alors inchangée ; aucun
ajustement partiel n’est effectué.
Appuyer sur la touche programmable Off ou sur la touche Off située au-dessus de la molette (ou
sur la touche
l'écran d'accueil. Appuyer sur la touche programmable Cancel pour terminer l'ajustement et
restaurer le dernier paramètre à la valeur qu'elle avait lors de la sélection pour l’ajustement.
19
Home) pour mettre fin à l’ajustement, maintenir la valeur nouvelle et retourner à
Page 21

tension.
CP
Puissance constante
Implémente I = W/V où W est le réglage du niveau.
CG
Conductance constante
Implémente I = V * G où W est le réglage du niveau.
au repos.
6.5 Configuration de la charge
La séquence normale de fonctionnement consiste à sélectionner le mode Load, définir le niveau
de fonctionnement et la tension de mise au repos recherchés, et ensuite d’activer l’entrée. Si
l’opération transitoire est requise, les paramètres de réglage de deuxième niveau et de la vitesse
de balayage doivent être ajustés, ainsi que la fréquence et le cycle de service de l’oscillateur
interne s’il doit être utilisé.
L'écran d'accueil affiche tous les réglages de paramètre, qui peuvent être considérés avant que
l'entrée soit activée. Tous les paramètres à l’exception du mode de charge et de la plage des
niveaux peuvent être réglés quand l’entrée est activée. La modification du mode de charge quand
l’entrée est activée déclenchera un détecteur d’erreurs et provoquera la désactivation de l’entrée
jusqu’à ce que la modification soit appliquée.
6.6 Sélection du Mode de charge
La première action dans la configuration de l'unité pour une application particulière est de choisir
le mode de charge, ce qui détermine comment le courant absorbé par la charge varie avec la
tension appliquée (V). La touche programmable Mode sur l'écran d'accueil ouvre un menu offrant
différents modes répertoriés dans le tableau ci-dessous. Des descriptions plus détaillées des
propriétés de chaque mode sont données dans le chapitre « Notes d’application » plus loin dans
ce manuel.
La modification du mode nécessite que l'entrée de charge soit désactivée, ce qui se fait
automatiquement si elle n’a pas été déjà effectuée par l'utilisateur. L'affichage retourne à l'écran
d'accueil, dès qu'un mode est sélectionné.
Les modes de fonctionnement disponibles sont :
CC Courant constant
CR Résistance constante
Le courant est le réglage du niveau, indépendant de la
Implémente I = (V-V
niveau et V
mise au repos
6.7 Réglage du nivea u A et du niveau B
L’enfoncement de la touche programmable Level sur l'écran d'accueil ouvre initialement l’invite
de réglage de niveau pour soit le niveau A, soit le niveau B, selon celui qui a été modifié en
dernier. Les touches programmables de droite, libellées A SET et B SET peuvent être utilisées
pour faire passer l’invite à l’autre niveau. Si le niveau en cours de modification n'est pas actif
dans le contrôle de la charge, une touche programmable Select apparaîtra permettant d'en faire
la sélection active, le cas échéant. Il est possible de saisir une nouvelle valeur numérique, tel que
décrit ci-dessus. Les réglages spécifiques aux deux valeurs de niveau sont conservés pour
chaque mode de fonctionnement.
Le menu de réglage du niveau reste sur l'écran, permettant ainsi d’apporter d'autres
changements, jusqu'à ce que la touche programmable
pour revenir à l'écran d'accueil.
mise au repos
est le réglage de la tension de la mise
Back ou la touche Home s oit enfoncée
)/R où R est le réglage du
6.8 Tension de mise au re pos
L’enfoncement de la touche programmable Dropout sur l'écran d'accueil ouvre l’invite de réglage
de la tension de mise au repos. De la manière habituelle, celui-ci affiche le réglage de la tension
de mise au repos actuel, l’étendue de la plage de la nouvelle valeur, et la résolution maximale
des réglages. Après la saisie du chiffre, appuyer sur la touche programmable mV ou V pour
appliquer le réglage. Soit la touche programmable
à l'écran d'accueil.
20
Back, soit la touche Home retourne l'affichage
Page 22

Le but premier du réglage de la tension de la mise au repos est de protéger les batteries contre
une décharge excessive. La charge cessera de conduire le courant lorsque la tension appliquée
de la source est inférieure à ce paramètre. Noter qu’il s’agit d’une limite dynamique, pas d’un état
de verrouillage, donc si une résistance câblée existe entre la source et le point de détection de la
tension de la charge, il y aura alors une entrée douce en condition de mise au repos – quand le
courant commence à diminuer, la chute de tension en série se réduit, élevant de cette manière la
tension mesurée par la charge. Les batteries peuvent aussi récupérer lorsque la charge est
réduite, élever la tension au-dessus du seuil de mise au repos de manière à ce que la charge
reprenne la conduction. Il existe une possibilité de chasse ou d’instabilité lors de cette opération.
Le voyant du panneau avant passera au jaune et la ligne de statut indiquera Dropout lorsque le
circuit de mise au repos devient actif.
Le réglage de la tension de mise au repos a un effet spécial en mode résistance constante (CR),
lorsqu'elle fournit un point de départ pour la caractéristique de résistance constante (voir la
description dans le chapitre « Notes d’application » pour plus de détails).
Le réglage de la tension de mise au repos est également utilisé comme seuil pour le circuit à
démarrage lent (voir ci-dessous).
Si la fonctionnalité de mise au repos n’est pas requise, régler la tension de mise au repos à 0
Volt. La ligne de statut indique Dropout comme avertissement chaque fois que ce paramètre est
supérieur à 0 V et qu’aucun courant n'est absorbé.
6.9 Démarrage lent
Le but du circuit de démarrage lent est de faire grimper la demande de la charge lentement de
zéro à la valeur finale. Le taux d’augmentation est déterminé par le réglage de la vitesse de
balayage. L’augmentation commence lorsque l'entrée est activée, ou lorsque la tension de la
source attachée dépasse le niveau du réglage de la tension de mise au repos. Lorsque l'entrée
est désactivée, la demande chute pour fournir un arrêt lent (à condition, bien sûr, que la tension
de la source demeure active).
Le réglage de cette fonctionnalité se trouve dans le menu transitoire, appuyer donc tout d'abord
sur la touche programmable Trans sur l'écran d'accueil pour accéder au menu transitoire, puis
appuyer sur la touche programmable Slow de ce menu pour accéder à une touche programmable
qui permet d’activer ou de désactiver le démarrage lent. Même si elle est activée, Slow
apparaîtra sur la ligne de statut de l'instrument. Appuyer sur la touche programmable Back pour
retourner au menu transitoire ou sur la touche Home pour revenir directement à l'écran d'accueil.
En mode CP (puissance constante) la fonctionnalité de démarrage lent sera presque toujours
nécessaire pour éviter la condition de verrouillage qui se produit à basses tensions (l’obtention de
la puissance désirée requiert un courant élevé) si la source n'a pas la capacité en courant
suffisante pour atteindre le niveau de puissance recherché. Voir le chapitre « Notes
d'application » plus loin pour une discussion sur les conséquences du fait que le mode de
puissance constante provoque la charge d'agir comme résistance négative.
En mode CR (résistance constante), la charge démarrera au niveau maximum d’Ohms de la
plage active et descendra jusqu'à la valeur d’Ohms finale. Du fait que la résistance initiale n'est
pas infinie, il y aura une montée de courant initiale avant la réduction lorsque la charge devient
active. Noter également qu'un balayage linéaire en Ohms n'est pas un balayage linéaire en
ampères si la source de tension est constante.
6.10 Introduction au fonctionnement transitoire
L’unité inclut la possibilité de générer des transitions de charge pour aider à tester la réponse
transitoire d’une source. Le fonctionnement transitoire est disponible dans tous les modes de
fonctionnement. Une transition est une alternance entre les paramètres du niveau A et du
niveau B, avec la transition entre les deux niveaux en ligne droite (dans la variable contrôlée du
mode actif) dont la pente est déterminée par le paramètre de vitesse de balayage. Noter que la
transition est définie par le réglage des deux niveaux absolus, et non pas par la différence entre
eux (comme dans le cas de certaines charges électroniques). Il n'y a aucune limitation sur
l’ampleur des deux niveaux.
21
Page 23

Les transitions peuvent être déclenchées soit par l’oscillateur interne, soit par un signal TTL
externe (voir la description du menu Extern à la page 27 ci-dessous).28 L’opération transitoire
contrôlée par l'oscillateur interne commence toujours avec le paramètre du niveau A, y compris
une transition à partir du niveau B, le cas échéant. L'oscillateur démarre lorsque la dernière des
trois conditions requises se produit : soit lorsque l'entrée est activée, soit quand la touche de
commande de niveau transitoire est sélectionnée, soit (si le circuit de démarrage lent est actif)
quand la tension de la source dépasse le seuil de tension de la mise au repos.
Il est également possible d’utiliser le mode de contrôle de tension analogique externe pour
générer des transitions de toutes les formes en utilisant un générateur externe pour produire la
forme d’onde souhaitée. Cette opération est également contrôlée par le menu Extern (page 28).
Noter que le signal externe passe toujours dans les circuits internes de contrôle de vitesse de
balayage ; il faut donc effectuer au préalable les réglages de vitesse de balayage appropriés.
Pour mettre fin à l’opération transitoire (interne ou externe) et revenir à un niveau constant,
appuyer sur la touche A ou B (dans la section
6.11 Menu transitoire
Appuyer sur la touche programmable Trans sur l'écran d'accueil pour accéder au menu
transitoire qui permet d'accéder aux commandes de la fréquence et du cycle de service de
l'oscillateur interne et des réglages de vitesse de balayage qui s'appliquent à tous les
changements de niveau, peu importe la cause.
LEVEL SELECT), le cas échéant.
Ces paramètres peuvent également être modifiés à l'aide des fonctionnalités de
décrites précédemment, mais pour ce faire l'unité doit être sur l'écran d'accueil et non pas sur le
menu transitoire.
Noter que les changements de la fréquence transitoire ou du cycle de service ne prennent pas
effet jusqu'à la fin du cycle actuel, au retour du niveau A. Ceci est particulièrement visible à très
basses fréquences. La désactivation, puis la réactivation de l'entrée de charge permettent
également de commencer immédiatement un nouveau cycle.
6.12 Fréquence transitoire
Le taux de répétition des transitoires internes peut être défini en termes de fréquence ou de
période. L’enfoncement de la touche programmable Freq ou Period sur le menu transitoire
ouvre le menu de réglage de fréquence et de durée. Une nouvelle valeur peut être saisie, dans la
représentation actuelle, de la manière habituelle. Deux touches programmables libellées Freq et
Period permettent de choisir la représentation alternative. Appuyer sur la touche programmable
Back pour retourner au menu transitoire ou sur la touche
Le libellé de la touche programmable du menu transitoire indiquera soit Freq, soit Period pour
refléter le choix le plus récent de la représentation.
6.13 Cycle de service transitoire
L’enfoncement de la touche programmable Duty sur le menu transitoire ouvre le menu de
réglage du cycle de service. Ce réglage spécifie le pourcentage de chaque répétition passée sur
le réglage niveau A, y compris la transition de niveau B à niveau A ; la transition de retour au
niveau B et le temps passé sur ce réglage occupent le reste du cycle.
Δ ADJUST
Home pour revenir à l'écran d'accueil.
22
La plage du cycle de service disponible est comprise entre 1 et 99 %, mais noter que la durée de
temps de chaque portion du cycle doit être suffisante pour que la transition définie par la vitesse
de balayage et les réglages de niveau se produise, autrement la charge n’atteindra jamais un état
stable à la valeur réglée avant que ne commence la prochaine transition dans le sens opposé.
Cette situation d’erreur est abordée ci-dessous. Appuyer sur la touche programmable Back pour
retourner au menu transitoire ou sur la touche
Home pour revenir à l'écran d'accueil.
Page 24

6.14 Vitesse de balayage
L’enfoncement de la touche programmable Slew sur le menu transitoire ouvre le menu de
réglage de vitesse de balayage. Le réglage de la vitesse de balayage définit la pente des
transitions entre les deux réglages de niveau. Il s’applique à tous les changements de niveau
qu’ils soient provoqués par un ajustement manuel, un ajustement à l’aide de la molette, par le
générateur transitoire interne ou par le contrôle de tension externe. Il est également utilisé pour
déterminer le taux d’augmentation et de réduction quand le circuit de démarrage lent est
actionné.
Le circuit de commande de balayage introduit une petite erreur supplémentaire dans l'exactitude
des paramètres de niveau, qui dépend du réglage de la vitesse de balayage réel. Si les
fonctionnalités dynamiques de la charge ne sont pas utilisées, alors la touche programmable
Default rétablit le circuit à l'état calibré pour une meilleure précision.
Le circuit fournit une transition linéaire dans la valeur de contrôle du mode actif, donc, par
exemple, en mode puissance constante (CP) la vitesse de balayage est exprimée en Watts par
microseconde, Watts par milliseconde ou (à des taux très lents) Watts par seconde. La forme de
la transition de courant n’est pour cette raison pas nécessairement linéaire quel que soit le mode
autre que celui de courant constant (CC).
En plus de l'habituelle invite numérique, ce menu affiche également le temps de transition
théorique calculé compte tenu des réglages de vitesse de balayage actuels et de la différence
entre le niveau A et le niveau B. Cette valeur théorique ne tient pas compte de toute dépendance
du temps de transition actuel sur les caractéristiques de la source et la charge, les impédances et
l’inductance d'interconnexion susceptibles de se produire, en particulier à des taux de balayage
élevés. L'utilisateur doit s'assurer que le temps de transition qui résulte des valeurs saisies n'est
pas plus court que le temps minimal de transition possible dans le mode actuel, qui est
documenté dans les spécifications. Il est à souligner que des dépassements graves peuvent se
produire si la vitesse de balayage est plus rapide que la combinaison de la source et de la charge
est capable de supporter (qui peut être plus lente que la valeur dans les spécifications qui
s'applique aux conditions optimales), voir la section « Limitations de la vitesse rapide de
balayage » » Voir la section 6.14.2.
Pour régler la vitesse de balayage au délai transitoire minimal qu’il est possible d’atteindre dans
le mode actuel, comme indiqué dans les spécifications, appuyer sur la touche programmable
Optimum.
L’enfoncement de la touche programmable Range permet d’afficher les limites de vitesse de
balayage disponibles pour la plage et le mode de fonctionnement actuels. Si une valeur de
vitesse de balayage est saisie et qu’elle dépasse les paramètres limites de la plage, un message
d'erreur s'affiche, suivi également par l’affichage des limites en question.
La bande passante des étapes de la puissance de la charge est réduite (en changeant les
réseaux de compensation) lorsque la vitesse de balayage a une valeur inférieure à 0,1 % de la
vitesse de balayage maximale pour le mode de charge et la plage donnés. Par exemple, A en
mode courant constant, le réglage de vitesse de balayage maximal est 500A/ms, la bande
passante est ainsi réduite lorsque la vitesse de balayage est < 500A/s. Cette modification est
apportée même si les fonctionnalités de transition ne sont pas utilisées et modifie le
comportement dynamique de l'unité. Ceci peut améliorer la stabilité avec certaines combinaisons
compliquées de caractéristiques de source et charge.
Après avoir effectué la mise à jour du réglage de la vitesse de balayage, appuyer sur la touche
programmable Back pour retourner au menu transitoire ou sur la touche
l'écran d'accueil.
Home pour revenir à
23
Page 25

6.14.1 Limitations de la vitesse lente de balayage
Il y a une limite inférieure à la valeur de vitesse de balayage utilisable qui est déterminée par la
combinaison de la vitesse de balayage, la fréquence, le cycle de service, et la différence entre les
deux niveaux. Si le temps de transition requis (qui est la différence entre les réglages de niveau
divisée par la vitesse de balayage) est plus long que la période disponible (qui est la période de
l’oscillateur multipliée par le facteur de service le moins élevé), la transition n’aura alors pas le
temps de se faire avant que l’oscillateur n’initie un retour vers l’autre niveau. Par conséquent, le
paramètre de niveau prévu ne sera jamais atteint. Dans ce cas, Slew s'affiche dans la ligne de
statut comme un avertissement.
6.14.2 Limitations de la vitesse rapide de balayage
Dans la pratique, il existe un certain nombre de limitations sur la vitesse de balayage la plus
rapide effectivement réalisable. L’une d’entre elles est le temps de transition minimal des étages
de puissance de la charge (qui dépend du mode de fonctionnement – voir les spécifications). Si
une combinaison d’une vitesse rapide de balayage et d’un petit changement de niveau implique
un temps de transition plus court, alors le temps de stabilisation de l’étage de puissance
dominera.
Le comportement dynamique d’une combinaison source et charge à des vitesses de balayage
élevées dépend de beaucoup de facteurs, en particulier de l’inductance d’interconnexion et du
facteur d'amortissement des boucles de rétroaction. En outre, la réponse des étages de
puissance de la charge est plus lente quand le fonctionnement se fait à des courants très bas ou
très élevés, ou à des tensions basses. Dans beaucoup de circonstances, un réglage de vitesse
de balayage plus lent sera nécessaire pour éviter les aberrations.
Si une tentative est effectuée pour définir une vitesse de balayage plus rapide que possible dans
les circonstances, des dépassements importants et des temps de stabilisation prolongés risquent
alors de survenir. Lors de la configuration de transitions rapides approchant les limites des
capacités de l'unité, il est fortement recommandé que la sortie du courant moniteur soit visionnée
sur un oscilloscope pour vérifier les résultats réellement obtenus. Éviter avant tout une transition
rapide vers un courant faible, car cela peut entraîner dans l'étage de puissance un état de
coupure, qui incombe un temps de récupération long et éventuellement de multiples impulsions
de courant.
En mode CR (résistance constante), quand le courant est inversement proportionnel à la
transition de résistance, il est particulièrement difficile de prédire le réglage de vitesse de
balayage le plus utile.
6.15 Limites de tension et de coura nt
Ces limites spécifient des valeurs de tension de source et de courant de charge qui inciteront la
charge à désactiver automatiquement son entrée si la tension ou le courant mesurés dépassent
la limite définie. Ce n'est pas un déclenchement indépendant provoqué par le matériel, mais une
simple comparaison par rapport aux mesures.
Pour accéder au menu des limites, appuyer sur la touche programmable Limits sur l'écran
d'accueil.
La touche programmable V / I perm et de passer d’un réglage de limites à l’autre, permettant la
saisie d’une valeur numérique pour chacune d’entre elles de la manière habituelle.
L’enfoncement de la touche programmable None (ou la saisie d'une valeur zéro) désactive cette
limite particulière. Appuyer sur la touche programmable Back ou sur la touche
à l'écran d'accueil.
Home pour revenir
24
Lorsqu’une valeur est spécifiée pour chaque limite, Lim s'affiche sur la ligne de statut de l'écran.
Ensuite, si l’une ou l'autre des limites est dépassée, un message d'erreur s'affiche et l'entrée de
la charge est désactivée.
Page 26

6.16 Fonctionnalités de sauvegarde et de réinitialisation
L'instrument est capable de mémoriser et de réinitialiser jusqu'à 30 ensembles de paramètres de
charge définis par l'utilisateur dans la mémoire non volatile. Chaque emplacement de mémoire
conserve l’ensemble des paramètres définis – mode de charge, niveau actif, valeur du niveau A,
valeur du niveau B, niveau de tension de mise au repos, fréquence transitoire, cycles de vitesse
et de service, et la condition de démarrage lent.
Les menus de sauvegarde et de réinitialisation affichent tous les deux un aperçu des paramètres
qui sont déjà stockés dans chaque emplacement de mémoire. Si un emplacement de mémoire
est vide, le symbole suivant apparaît (---). Un emplacement de mémoire peut être sélectionné soit
en utilisant la touche ▲ ou ▼ ou la molette pour faire défiler les emplacements en séquence,
soit en saisissant le numéro d'emplacement directement à l'aide du pavé numérique (précédé
d’un zéro, le cas échéant). Le numéro d'emplacement de mémoire actuellement sélectionné (et le
nom spécifié par l'utilisateur) est mis en surbrillance à l'écran, le numéro d'emplacement est
également affiché au-dessus du tableau de paramètres prévisionnels (cette copie du numéro
d'emplacement est également mise à jour pendant une saisie numérique).
Remarque : les menus de sauvegarde et de réinitialisation sont presque identiques, se reporter à
l’intitulé du menu dans le coin supérieur gauche pour faire la distinction entre les deux.
6.16.1 Menu de sauvegarde
Pour accéder au menu de sauvegarde, appuyer sur la touche programmable Store sur l'écran
d'accueil. Il y a trois options disponibles qui peuvent être appliquées à chaque emplacement de
mémoire – sauvegarder les paramètres actuels dans l'emplacement de mémoire, supprimer le
contenu de l'emplacement de mémoire et renommer l'emplacement de mémoire.
Pour sauvegarder la configuration actuelle de charge et les paramètres dans un emplacement de
mémoire, sélectionner l'emplacement souhaité, puis appuyer ensuite soit sur la touche
programmable Confirm (si l'emplacement est actuellement vide), soit sur la touche
programmable Replace pour écraser le contenu existant. Une fois enregistrés, les paramètres
seront affichés dans l'aperçu de la table. Si l'endroit était vide avant l'opération de sauvegarde,
l'emplacement initialement recevra alors le nom par défaut de Store_nn, où nn est le numéro
d'emplacement.
Pour renommer un emplacement de mémoire, appuyer sur la touche programmable Rename qui
ouvre l'écran de saisie de caractères. Sélectionner un caractère à l'aide de la molette, ou
alternativement les chiffres de 0 à 9 ; la virgule peut être saisie à l'aide des touches numériques.
Pour entrer le caractère sélectionné, appuyer sur la touche programmable Enter. Pour supprimer
le caractère précédemment saisi, appuyer soit sur la touche programmable CE, soit sur le bouton
CE.
Utiliser les touches ◄ et ► pour choisir la position du caractère. Le nombre maximal de
caractères dans un intitulé d’emplacement de mémoire est limité à 10. Après avoir terminé la
saisie de la chaîne de caractères, appuyer sur la touche programmable Confirm pour accepter
les modifications et retourner au menu de sauvegarde où le nom de l'emplacement de mémoire
sera automatiquement actualisé. Il est également possible d’appuyer sur la touche programmable
Cancel pour rejeter toutes les modifications et laisser l’intitulé de l'emplacement de mémoire
inchangé.
Pour supprimer le contenu d'un emplacement de mémoire, sélectionner l'emplacement souhaité
puis appuyer sur la touche programmable Delete. Delete apparaît alors en haut à gauche de
l'écran et les touches programmables répertorieront les options, soit Cancel (annuler la
suppression), soit Confirm (confirmer que le contenu de l’emplacement doit être supprimé). Le
contenu de l'emplacement de mémoire n'est pas effacé jusqu'à ce que la touche programmable
Confirm soit enfoncée. L’enfoncement de la touche programmable Cancel permet de retourner
au menu de sauvegarde sans supprimer le contenu de l'emplacement de mémoire. Dès que la
suppression est confirmée, les paramètres de charge et l’intitulé d'emplacement seront
remplacés par le symbole (---).
25
Page 27

Mode de charge :
Courant constant.
niveau B :
le mode CR.
repos :
Démarrage lent :
Désactivé
transitoire :
balayage :
paramètres de niveau.
protection :
6.16.2 Menu de réinitialisation
Pour accéder au menu de réinitialisation, appuyer sur la touche programmable Recall sur l'écran
d'accueil. Pour réinitialiser les paramètres de charge d'un emplacement de mémoire, sélectionner
l'emplacement de mémoire désiré à l'aide de la touche ▲ ou ▼ ou de la molette, puis appuyer
sur la touche programmable Confirm. L'instrument retourne ensuite directement à l'écran
d'accueil avec tous les paramètres de charge réinitialisés mis à jour, mais l'entrée de charge sera
désactivée pour éviter des résultats inattendus. Alternativement, appuyer sur la touche
programmable Back ou sur la touche
paramètres de charge sauvegardés.
6.17 Menu des utilitaires
L’enfoncement de la touche programmable Utilities sur l'écran d'accueil permet d'accéder à
quatre sous-menus pour configurer divers paramètres de l'instrument et les préférences. Les
instruments équipés d'interfaces de contrôle à distance numérique ont un cinquième sous-menu.
Il est possible d’effectuer la sélection en utilisant soit la touche ▲ ou ▼ , soit la molette. Appuyer
sur la touche programmable OK pour lancer la sélection et entrer dans le sous-menu, ou appuyer
sur la touche programmable Back ou sur la touche
6.17.1 Réglages optionnels
Il y a deux préférences qui peuvent être changées : l'état de l'entrée à la mise sous tension et
l’activation du vibreur. Chaque préférence a deux options mutuellement exclusives, avec la
sélection active indiquée par un
▼ , soit la molette, puis appuyer sur la touche programmable Confirm pour amorcer la sélection.
Home pour revenir à l'écran d'accueil, sans réinitialiser les
Home pour revenir à l'écran d'accueil.
. Sélectionner l'option voulue en utilisant soit la touche ▲ ou
6.17.2 Réinitialisation des paramètres d'usine
La sélection de ce sous-menu ouvre un autre sous-menu afin de déterminer s'il faut réinitialiser
juste la configuration actuelle de charge et les paramètres (ce qui est utile en cas de problème),
ou juste effacer le contenu de chaque emplacement de mémoire de sauvegarde et de
réinitialisation, ou de tout réinitialiser.
Faire preuve de prudence avant de confirmer, car ce processus ne peut pas être annulé. Appuyer
sur la touche programmable Confirm pour confirmer la réinitialisation et repasser au menu
Utilitaires. Alternativement, pour renoncer à la réinitialisation, appuyer sur la touche
programmable Cancel pour retourner au menu des utilitaires ou sur la touche
directement à l'écran d'accueil.
Les paramètres par défaut (qui sont également définis par la commande à distance *RST) sont :
Niveau A et
Tension de mise au
Générateur
Zéro pour tous les modes, sauf une résistance maximale pour
0 V.
De 1 Hz à 50 % du cycle de service.
Home pour revenir
Vitesse de
Limites de
6.17.3
26
Le paramètre par défaut pour meilleure calibration des
Réglées à zéro
Page 28

6.17.4 Réglage du contraste de l’écran
Ce sous-menu propose le choix d'un affichage blanc sur noir ou noir sur blanc à l'aide de la
touche programmable Invert. Le réglage du contraste de l'écran permet ensuite d’optimiser
l'affichage en fonction de l’angle de vue et de la température ambiante. Utiliser la molette pour
changer le réglage, tout en surveillant l'écran de prévisualisation. Appuyer sur la touche Confirm
pour conserver les nouveaux paramètres ou sur touche Cancel pour rétablir les paramètres
précédents et retourner au menu des utilitaires, ou sur la touche
directement à l'écran d'accueil.
6.17.5 Calibration
Le menu de calibration permet d’ajuster les paramètres de calibration existants et ne doit être
effectué que par un personnel qualifié ayant accès à l'équipement de test nécessaire pour la
calibration. L’entrée au menu de calibration nécessite un mot de passe qui est inscrit dans le
manuel d’entretien, ainsi que les détails de la procédure de calibration. Contacter votre
fournisseur si vous avez besoin d'une copie.
6.17.6 Configuration de l’interface
Le menu de réglage de l'interface s'affiche uniquement sur la version programmable de
l'instrument. Il permet le réglage de l'adresse GPIB et donne un aperçu de l'état de la connexion
LAN et indique l'adresse IP obtenue par l'unité une fois la connexion établie.
Home pour retourner
L'adresse GPIB peut être ajustée en utilisant la molette et peut être définie sur une valeur
comprise entre 0 et 30, mais doit être unique sur le bus. L'unité n’est pas équipée du mode
écoute seulement. L'adresse est modifiée uniquement lorsque la touche programmable Confirm
est enfoncée ; alternativement, l'adresse peut être laissée à sa valeur précédente en appuyant
sur la touche programmable Cancel.
27
Page 29

entrées sont protégées contre toute surtension d’entrée jusqu’à 50 V.
7. Contrôle à distance analogique
Il existe deux formes de fonctionnement de contrôle de tension à distance : Le contrôle External
Voltage, où une tension analogique définit entièrement le niveau demandé du mode de
fonctionnement choisi et le contrôle External TTL où une tension logique externe effectue une
sélection entre les deux niveaux dénommés Niveau A et Niveau B. La même entrée de tension
de contrôle du panneau arrière est utilisée pour les deux modes.
Ces bornes sont reliées à la masse du châssis. Impédance d’entrée de 10 kΩ. . Les
L’enfoncement de la touche programmable Extern sur l'écran d'accueil ouvre le menu de
sélection externe, où soit la molette, soit la touche ▲ et ▼ peuvent être utilisées pour mettre en
surbrillance la méthode de contrôle externe souhaitée. L’enfoncement de la touche
programmable Enable permet de passer à la méthode en surbrillance ; alternativement,
l’enfoncement de la touche programmable Back ou de la touche
l'écran d'accueil laissant la sélection de niveau inchangée.
Home retourne l'instrument à
Pour repasser de contrôle externe à contrôle interne, utiliser l'une des trois touches de
SELECT
.
7.1 Contrôle de la tensi on à distance
Lorsque le contrôle de tension externe est activé, le voyant Ext s'allume et Ext V s'affiche dans la
barre de statut. Les paramètres internes de niveau A et de niveau B n'ont plus aucun effet. Le
mode de charge et la totalité de la plage de mesures peuvent toujours être modifiés selon la
procédure habituelle, le cas échéant. Le réglage de la tension de mise au repos reste actif, s’il
est réglé au-dessus de zéro.
L’entrée du CONTROL VOLTAGE a un facteur d’échelle de 4 Volts à pleine échelle. Les facteurs
de conversion pour chaque mode et plage sont :
Plage de fonctionnement Facteur d’échelle
16 Amps 4 Amps par Volt
400 Watts 150 Watts par Volt
10 kOhms 2500 Ohms par Volt
1 A/V (Siemens) 0·25 A/V (Siemens) par Volt
Le circuit de vitesse de balayage et ses réglages restent en circuit et la forme d’onde transitoire
requise peut être obtenue en ajustant ces réglages ainsi que la forme du signal appliqué à
l’entrée à distance, sujet à des limitations de temps de transition du circuit de charge.
LEVEL
7.2 Sélection de niveau à distance
Lorsque le contrôle TTL externe est activé, le voyant Ext s'allume et Ext TTL s' affiche dans la
barre de statut. Si le signal externe appliqué à l’entrée CONTROL VOLTAGE est en dessous du
seuil logique (nominalement + 1,5 V) le niveau réglé par le contrôle du niveau A est alors actif ; si
le signal est au-dessus du seuil, alors c’est le niveau réglé par le contrôle du niveau B q ui
s’applique. N'importe quel signal logique (TTL ou autre) qui franchit le seuil de 1,5 V est
satisfaisant. Les transitions sont définies par le réglage de la vitesse de balayage. Tous les
paramètres peuvent être modifiés selon les besoins de la manière habituelle.
28
Page 30

8. Notes d’application
Ce chapitre est destiné à donner des informations utiles concernant les applications pratiques de
l’unité. Tous les chargeurs électroniques sont sujets à l’impact des caractéristiques des sources,
de l’inductance des interconnexions et des caractéristiques de boucle de rétroaction, qui peuvent
entraîner une instabilité inattendue ou un comportement dynamique insatisfaisant. Les
informations fournies dans ce document permettent de mieux comprendre les facteurs impliqués.
Les sections initiales ci-dessous concernent les considérations générales, tandis que les sections
suivantes fournissent de plus amples détails sur les caractéristiques particulières de chaque
mode de fonctionnement.
8.1 Sources
Les batteries sont une source à faible impédance et en dehors de la possibilité d’inductance dans
les fils d’interconnexion, elles sont généralement faciles à utiliser avec un chargeur électronique.
La facilité de relâchement de tension doit être utilisée pour éviter que les batteries ne soient
endommagées par une décharge excessive.
Les alimentations électroniques ont des réseaux à rétroaction actifs dont les caractéristiques
dynamiques interagissent souvent avec le chargeur. Quand ce chargeur (comme cet instrument)
comporte aussi une rétroaction active dont les caractéristiques dynamiques dépendent à leur tour
de la nature de la source, il sera évident que le comportement du système en résultant peut être
impossible à prévoir.
8.1.1 Résistance de la source
Si une source a une résistance considérable (y compris la résistance des fils de raccordement),
telle que la tension baisse quand le courant augmente, il est important de s'assurer que la tension
entre les bornes du chargeur reste à tout moment supérieure à la tension opérationnelle minimale
admissible. Les considérations particulières concernant la résistance de la source qui s'applique
en mode de puissance constante sont couvertes dans la section portant sur ce mode ci-dessous.
8.1.2 Inductance de la source
L’inductance de la source et de l’interconnexion a un impact majeur sur le comportement du
chargeur : la caractéristique fondamentale de l’inductance est qu’elle génère une force
électromotrice qui résiste à tout changement du courant. Quand le courant augmente,
l’inductance génère une force électromotrice qui réduit la tension entre les bornes du chargeur,
quelquefois même au point de saturer le chargeur. Chaque fois que la tension descend en
dessous de 25V environ, la transconductance des étapes de puissance change
considérablement ; ceci modifie le facteur d’amortissement de la boucle de rétroaction et son
comportement dynamique, ce qui peut entraîner des dépassements et même une oscillation.
Si le courant du chargeur baisse, l’inducteur génère une tension transitoire qui pourrait excéder la
tension nominale du chargeur. L’unité est dotée de tubes de décharge de gaz conçus pour
absorber les transitoires non répétitifs. Même si le détecteur de surtension désactive
l’alimentation du chargeur, ces GDT restent connectés, donc si la présence de niveaux d’énergie
élevés est probable, une forme quelconque de protection extérieure doit être ajoutée, telle qu’une
diode de niveau connectée à la source de l’inducteur.
8.1.3 Capacité parallèle
Le chargeur ne peut qu’absorber le courant, il ne peut donc que réduire la tension à ses bornes.
La source doit augmenter la tension, et fournit un courant de charge à toute capacité dans les
bornes. Si le courant total disponible est plus que suffisant pour charger cette capacité à la
vitesse de balayage requise, alors le chargeur continuera à conduire le courant excédentaire
pendant la transition et le comportement sera celui prévu. Cependant, si la source ne peut pas
charger la capacité à la vitesse de balayage requise, alors le chargeur se coupera jusqu'à ce que
la tension finale soit obtenue. Il y aura alors un dépassement quand il commence à devenir
conducteur, suivi d’une sonnerie quand la source répond.
29
Page 31

8.2 Stabilité des c ombinaisons de source et de chargeur
Cet instrument est optimisé pour être précis dans des conditions de chargeur constantes en
utilisant une boucle de rétroaction à gain élevé. Il est, de ce fait, possible que des combinaisons
de caractéristiques de source, d’interconnexion et de chargeur provoquent une hausse de
l’instabilité. On dégage trois causes potentielles majeures : inductance dans le câblage entre la
source et le chargeur (ou une impédance de sortie inductive de la source), capacité en parallèle
avec la connexion entre la source et le chargeur (y compris un condensateur de sortie dans la
source) et les caractéristiques de circuits à rétroaction active dans la source.
En modes puissance, conductance et résistance constantes, le système comprend un
multiplicateur analogique utilisé par le chargeur pour dériver la demande de courant de la tension
instantanée. Ceci réduit la bande passante de la boucle et ajoute un décalage supplémentaire de
la phase. En général, le mode à courant constant est le plus susceptible d'être stable, mais dans
certains cas, l'instabilité peut être évitée en utilisant un autre mode. Les conditions qui affectent le
comportement dynamique du chargeur en fonctionnement transitoire mènent également à
l'instabilité, et certaines suggestions dans les sections ci-dessous peuvent se révéler utiles.
Un grand nombre d’alimentations comprennent des filtres de sortie L-C pour réduire le bruit ; ils
introduisent un déphasage supplémentaire dans la combinaison de l’ensemble source et
chargeur, et peuvent augmenter le risque d’instabilité. Si aucun amortissement n’existe sur
l’inducteur, un circuit résonant peut se former qui permet aux oscillations de croître et d’atteindre
une amplitude significative.
8.2.1 Mesures correctives
Les réseaux de compensation de la charge à l’allumage sont modifiés lorsque la vitesse de
balayage est établie a une valeur inférieure à 0,001 de la vitesse de balayage maximale pour le
mode et l’échelle de charge concernée. Par exemple, si le mode à courant constant est
sélectionné, le paramètre de la vitesse maximum de balayage est de 500 A/ms, donc la vitesse
de balayage des réseaux de compensation est modifiée à une valeur inférieure à 500 A/s. Même
si les installations transitoires ne sont pas utilisées, cette modification de la compensation réduit
la bande passante et peut stabiliser la combinaison de source et de chargeur.
En cas d’instabilité, vérifier la forme de l’onde de tension entre les bornes du chargeur avec un
oscilloscope : si à un moment quelconque, la tension dépasse la force électromotrice du circuit
ouvert de la source, un élément inducteur doit alors être présent pour former un circuit résonnant.
Il faut trouver le moyen d’insérer un amortisseur dans ce circuit. Une technique consiste à utiliser
un réseau comprenant un condensateur et une résistance en série (quelquefois appelé un réseau
Zobel), entre les bornes d’entrée du chargeur. Un grand nombre de chargeurs électroniques
comportent un tel réseau intégré ; ce chargeur n’en dispose pas pour augmenter sa polyvalence
en offrant une capacité d’entrée la plus basse possible. Il peut être ajouté en externe : des
valeurs d’environ 2,2 µF et 5 Ω sont fréquentes, mais il faut noter que ceci doit être une
résistance de puissance non inductive capable de dissiper quelques watts. Un type de résistance
à film métallique est plus adaptée - les résistances à bobine ne conviennent pas.
8.3 Comportement dynamique en fonctionnement tr ansitoire
Quand les capacités transitoires du chargeur sont utilisées, le comportement dynamique de la
combinaison de la source et du chargeur pendant les transitions dépendent de considérations
similaires à celles qui affectent la stabilité : caractéristiques d’inductance en série, de capacité
parallèle et de boucle de rétroaction. Le fonctionnement correct dépend du fait que le chargeur
ne sature pas ni ne s’arrête à un point quelconque du cycle. Plus la vitesse de balayage cherche
vite, plus on risque de voir apparaître des aberrations sur les transitions.
30
En raison de changements dans la transconductance des TEC, le comportement dynamique des
étapes de puissance change à la fois à courants faibles et élevés, et aussi à basses tensions
quand la capacité inter-électrode augmente considérablement. En règle générale, le
comportement est optimal sur la partie inférieure de la plage de courant (de 100 mA à 4 A) et à
des tensions > 25 V.
Page 32

Essayer d’obtenir une vitesse de balayage au-delà des capacités de la combinaison de la source
et du chargeur aura pour conséquence un dépassement et une sonnerie considérables. La
réduction de la vitesse de balayage, quelquefois d’un faible montant, améliorera
considérablement la réponse.
8.3.1 Caractéristiques de la source
Le but du test transitoire est d’examiner le comportement de toutes les boucles de rétroaction
dans la source. Si la réponse de la source est sous-amortie, l’utilisation d’un charg eur actif
accentuera généralement l’effet. Ceci est particulièrement vrai dans les modes où le chargeur
répond à des modifications de tension. À des fréquences transitoires particulières (en particulier
aux hautes fréquences), le chargeur peut exciter des résonances dans les filtres L-C ou
correspondre à la fréquence naturelle d’une boucle de rétroaction. Cela peut entraîner une
réaction considérable de la source et éventuellement causer des dommages.
Les générateurs mécaniques ont une inductance et une inertie mécanique considérables ainsi
qu’un temps de réponse long. Le test de réponse transitoire de ces sources ne devrait être
effectué qu’à des vitesses de balayage lentes.
8.4 États transitoires de démarrage
Il y a deux états de démarrage différents à prendre en compte selon que la source ou le chargeur
est allumé en premier.
Si la source est allumée en premier et le chargeur activé ensuite, il peut y avoir un petit état
transitoire au démarrage, mais ceci ne dépassera pas en général le paramètre de niveau, sauf
s’il a été défini à un très bas niveau. Cet état transitoire peut être contrôlé en sélectionnant le
démarrage lent (Slow Start) et en définissant une petite vitesse de balayage (Slew Rate).
Dans l'autre cas, lorsque le chargeur est activé avant que la source ne soit allumée, des états
transitoires beaucoup plus importants peuvent être générés. La raison en est que, dès que le
chargeur est activé, la boucle de rétroaction interne tente de fournir le courant demandé par le
paramètre de niveau. En l'absence d'une source de tension, ceci se traduit par l’application d’une
tension de polarisation par les commandes de grille (gate drivers) aux TEC d’alimentation,
réduisant leur résistance au minimum (<500mΩ) pour tenter de forcer la circulation du courant.
C'est cette situation qui produit l’avertissement de basse tension Low Voltage sur la ligne d'état
de l'écran. Lorsque la source est allumée et qu’elle commence à produire une tension, elle est
initialement confrontée à ce chargeur de 500mΩ qui générera un courant transitoire considérable
jusqu'à ce que la boucle de rétroaction ait le temps de réagir et de réduire la tension de
polarisation sur les TEC. Il y a deux moyens de réduire ce phénomène. Le premier consiste à
utiliser la fonction Slow Start de démarrage lent avec un réglage différent de zéro de la tension de
mise au repos, Dropout Voltage, pour s'assurer que le chargeur n’essaie pas de produire du
courant avant que la tension de la source soit présente, puis définir la vitesse de balayage, Slew
Rate, pour contrôler le courant transitoire initial. Le second consiste à utiliser le mode de
résistance constante (CR), lorsque la tension zéro de la source devrait causer zéro courant. En
raison de la tolérance sur les tensions de suppression internes, il peut être nécessaire de régler
la tension de mise au repos sur une valeur faible (quelques dizaines de mV) pour s'assurer que
l'appareil n'entre pas en mode de saturation à basse tension, Low Voltage (le voyant jaune
indique également ce mode).
Pour tester le comportement d’une alimentation électrique au démarrage, la meilleure approche
est d'utiliser une petite alimentation auxiliaire pour mettre le chargeur sous pré-tension de
polarisation avant conduction, ainsi que des diodes isolantes en série pour provoquer le transfert
du courant du chargeur d’alimentation électrique polarisée à l'alimentation testée quand il
commence à produire sa tension de sortie.
8.5 Caractéristiques de chaque mode d'exploitation
Les sections suivantes donnent une brève description de l’application de chaque mode et
quelques explications de leur effet sur l’utilisation du chargeur.
31
Page 33

L'appareil a deux étapes de puissance (chacune avec un grand TEC) en parallèle. La réaction
d’intensité locale à chaque niveau garantit le partage égal de la puissance et la réaction totale
d’intensité à un niveau précédent est utilisée pour améliorer la précision. Cette architecture
fournit fondamentalement un contrôleur de courant constant. Idéalement, le fonctionnement des
étapes de puissance devrait être indépendant de la tension appliquée, mais en pratique, le gain
et la capacité inter-électrodes des TEC varient avec le point de fonctionnement, en particulier à
basse tension (en dessous de 25V) et à haute ou basse intensité. Le résultat est une réponse
plus lente, des conditions de stabilité et un comportement dynamique différentes à ces niveaux,
quel que soit le mode opérationnel.
Les autres modes opérationnels produisent d’abord le courant requis en fonction de la tension de
la source appliquée instantanément, puis utilisent les étapes de puissance pour produire ce
courant.
8.5.1 Mode Constant Current
Comme il a été décrit ci-dessus, ceci est le mode de fonctionnement fondamental des étapes de
puissance de cet instrument, il a donc la boucle de rétroaction la plus simple dans la bande
passante la plus large. Le signal de tension capté est uniquement utilisé pour les compteurs et la
protection. Le mode à courant constant, Constant Current, est normalement utilisé en conjonction
avec des alimentations à faible impédance et il sera normalement relativement stable sauf en
présence d’une inductance significative dans les interconnexions ou la source. En raison de la
bande passante plus large, il est particulièrement important d'avoir des connexions à faible
inductance dans ce mode.
Il faut noter que le chargeur ne peut pas être utilisé en mode à courant constant pour tester une
alimentation à courant constant, car cette combinaison ne comporte que deux conditions stables :
si le réglage du chargeur est inférieur à la limite de l'alimentation, l’alimentation ne fonctionnera
pas en courant constant et fournira sa tension de sortie maximale, alors que si le réglage du
chargeur est supérieur à la limite de l'alimentation, le chargeur sera saturé à sa résistance
opérationnelle minimum et l’alimentation fournira son courant nominal. Le meilleur moyen de
tester une alimentation à courant constant est d'utiliser le chargeur en mode de résistance
constante, avec un réglage approprié du décalage de Dropout Voltage (Tension de mise au
repos), comme il est décrit ci-dessous.
8.5.2 Mode Constant Power
Le mode à puissance constante, Constant Power, est appliqué en utilisant un diviseur analogique
pour diviser le réglage de puissance spécifié par la tension effectivement captée pour calculer le
courant nécessaire. Les étapes de puissance ajustent alors leur conductivité afin d'obtenir ce
courant. Si la tension de la source baisse, le chargeur cherchera alors à maintenir le même
niveau de puissance en réduisant sa résistance pour augmenter le courant. Le fait que le courant
augmente lorsque la tension baisse signifie que le chargeur agit comme résistance négative. Ce
comportement est également exposé par la plupart des circuits d'alimentation à découpage.
Cette caractéristique offre la possibilité d'une condition de déclenchement parasite, latch-up, si la
source comporte une impédance de sortie considérable. Pour expliquer ce phénomène, il faut
envisager la possibilité que la tension de la source baisse légèrement (peut-être à cause du bruit)
– le chargeur répond en augmentant le courant pour maintenir le niveau de puissance. Ceci
provoque une nouvelle baisse de la tension aux bornes de la source (à cause de son impédance
interne), l'augmentation de puissance est donc inférieure à celle prévue. Le chargeur répond à
cette situation en réduisant encore sa résistance afin d’essayer d'augmenter le courant et
d'obtenir la puissance requise. Un point de convergence est atteint lorsque la chute de tension
excède l'augmentation du courant et que le chargeur ne peut pas obtenir la puissance requise.
Ceci entraîne la condition de latch-up, le chargeur étant à sa résistance minimum (presque en
court-circuit), la tension entre les bornes presque à zéro, et la source fournissant son courant
maximum dans un chargeur presque en court-circuit. La ligne d'état de l'écran affichera
l’avertissement de basse tension, Low Voltage.
32
Si l'impédance de la source est purement résistive, cette condition sera déclenchée lorsque la
tension aux bornes de la source descendra à la moitié de sa tension à vide (ce qui représente la
condition de transfert maximum de puissance dans la théorie classique de l’électricité).
Page 34

Plus souvent, elle sera aussi déclenchée immédiatement si la source atteint le courant limite, ou
entre dans le mode à courant constant.
Le seul moyen de récupérer de cette situation est de désactiver soit l’entrée du chargeur, soit la
sortie de la source.La grande majorité des sources électroniques sont activées en état de courant
et de puissance limitée à l’allumage, donc pour éviter d'entrer immédiatement dans en condition
de déclenchement parasite, latch-up, il est nécessaire d'utiliser la fonction de démarrage lent,
Slow Start, du chargeur pour restreindre la demande de courant pendant que la source augmente
sa tension de sortie.
Comme le mode à puissance constante, Constant Power, possède les caractéristiques d’une
résistance négative, il est toujours possible de former un oscillateur à résistance négative
combiné à l’impédance de sortie de la source. En pratique, le mode à puissance constante
fonctionne normalement bien avec les sources conçues pour fournir une telle charge.
Pendant le fonctionnement transitoire, si la source a une tension constante (avec une faible
impédance de source), alors le courant suivra le changement de demande de puissance et la
réponse sera très similaire au mode à courant constant. Si la tension de la source baisse quand
la demande de puissance augmente, le courant (comme il a été décrit ci-dessus) doit augmenter
plus que proportionnellement et la vitesse de balayage aussi ; ceci limitera la vitesse de balayage
de la puissance maximum utile.
8.5.3 Modes conductance et résistance constantes
Dans ces deux modes, un diviseur-multiplicateur analogique est utilisé pour calculer le courant
nécessaire de la tension captée. En mode Conductance, le courant requis est calculé en
multipliant la tension captée par la conductance spécifiée ; en mode Résistance, le courant requis
est calculé en divisant la différence entre la tension captée et le paramètre de tension de mise au
repos par la résistance spécifiée.
Dans les deux cas, le courant augmente en même temps que la tension appliquée. Pour des
réglages de résistance et de conductance équivalents, le chemin de l’entrée de tension dans
l’étage de puissance est identique, les deux modes auront donc des caractéristiques de stabilité
très similaires.
En opération transitoire, les deux modes sont très différents. En mode Conductance, le courant
nécessaire suit de manière linéaire la valeur de conductance changeante et le comportement est
fondamentalement similaire au mode Courant constant. En mode Résistance, le courant requis
est inversement proportionnel au changement linéaire de la valeur de la résistance, la forme
d’onde de courant en résultant n’est pas du tout linéaire, et change rapidement pendant la partie
à faible résistance du cycle. Ce changement rapide accentue l’effet de l’inductance dans les
conducteurs d’interconnexion et peut facilement conduire à des limitations absolues et des
dépassements. Il est préférable d’utiliser le mode Résistance à des tensions plus élevées et
courants plus modestes.
8.5.3.1 Mode tension de mise au repos et mode résistance
L'utilisation de la fonction tension de mise au repos comme décalage en mode Résistance
constante, offre une grande flexibilité dans la construction des caractéristiques du chargeur pour
des circonstances particulières. Par exemple, la définition d’une faible valeur de la résistance et
une valeur importante de la tension de mise au repos, donne des caractéristiques semblables à
celles d’une chaîne de LED ou d’une diode Zener et fournit une alternative au mode Tension
constante (voir ci-dessous), mais sans les problèmes extrêmes de stabilité de ce mode.
8.6 Fonctionnement d’unités multiples
Il est possible de faire fonctionner deux chargeurs en parallèle en mode courant constant,
Constant Current, ce qui doublera à la fois le courant utilisé et la puissance produite d'une seule
unité. Les connexions à la source doivent être autant que possible appariées.
Il faut noter que des problèmes de stabilité supplémentaires peuvent survenir, en raison de
différences de réponse de phase entre les unités ; l'utilisation de plus de deux unités en parallèle
n'est pas recommandée. L’utilisation de multiples unités ne doit pas être utilisée dans un mode
autre que le mode Courant constant, quel qu’il soit.
33
Page 35

9. Configuration de l’interface de commande à
distance
Le modèle LDH400P peut être commandé à distance en utilisant son interface RS232, USB, LAN
ou GPIB.
L'interface GPIB offre toutes les fonctions décrites dans IEEE Std. 488 parties 1 et 2.
L'interface RS232 communique directement avec un port COM standard.
L'interface USB énumère comme un périphérique de classe de communications et interagit avec
le logiciel de l'application en utilisant un pilote standard de port COM virtuel sur le PC. Le
micrologiciel de l'instrument peut être mis à jour sur site via le port USB ; voir le chapitre
« Maintenance » pour plus de détails.
L’interface LAN (réseau local) est conçue pour répondre aux critères LXI (Lan eXtensions for
Instrumentation) version 1.4 LXI Core 2011. Il est possible de commander l’instrument à distance
par l'interface LAN en utilisant le protocole de prises TCP/IP. L’appareil comprend également un
serveur Web de base qui fournit des informations sur l’instrument et permet de le configurer à
partir d’un logiciel de navigation sur le Web. Il est également possible de le contrôler simplement
par une ligne de commande à partir du logiciel de navigation.
9.1 Interface GPIB
Le connecteur 24 voies de l’interface GPIB se trouve sur le panneau arrière de l’instrument. Les
connexions des broches sont conformes à la norme IEEE 488.1-1987 et l'instrument est
conforme aux normes IEEE 488.1-1987 et IEEE 488.2-1987.
Il offre toutes les capacités de transmission et de réception, de demande de service,
d’interrogation en série et en parallèle. Il n'y a aucun dispositif de déclenchement ou de contrôle
de l’instrument. Les sous-ensembles d'interface fournis aux termes de la norme IEEE 488.1 sont :
SH1, AH1, T6, L4, SR1, RL2, PP1, DC1, DT0, C0, E2.
L'adresse GPIB de l'instrument est définie sur le panneau avant : dans l’écran d’accueil ’Home’,
sélectionner le menu des utilitaires ’Utilities’, puis le paramétrage de l’interface ’Interface
Settings’. L'adresse GPIB actuelle s'affiche. Si elle doit être modifiée, utiliser le bouton rotatif
pour afficher l'adresse souhaitée, puis appuyer sur la touche programmable Confirm pour
confirmer.
L'interface fonctionnera avec n'importe quelle carte d'interface GPIB disponible sur le marché, en
utilisant les pilotes des périphériques et le logiciel de support fourni par le fabricant de cette carte.
9.2 Interface RS232
Le connecteur d'interface en série de type D à 9 voies se trouve sur le panneau arrière de
l’instrument. L’interface RS232 doit être connectée à un port de PC standard par un câble 9 voies
mâle-femelle sans connexions croisées. Alternativement, un câble 3 voies peut être utilisé,
reliant uniquement les broches 2, 3 et 5 au PC, mais avec des liens dans le connecteur côté PC
entre les broches 1, 4 et 6 d’une part, et entre les broches 7 et 8 d’autre part, comme le montre le
diagramme :
34
Page 36

La plupart des câbles disponibles sur le marché comportent ces connexions.
En plus des conducteurs de transmission et de réception des données, l'instrument détecte
passivement les broches 1 (DCD) et 6 (DSR), commande activement la broche 8 (CTS) et
contrôle la broche 4 (DTR) du PC. Ceci permet d'utiliser un câble 9 broches intégralement
connecté.
Le débit en bauds de cet instrument est fixé à 9600 ; les autres paramètres sont 8 bits de
données, pas de parité et un bit d'arrêt. Le contrôle de flux utilise le protocole XON/XOFF, mais
en raison du faible volume de données associé à cet instrument, il est très improbable que le
contrôle de flux soit effectivement utilisé.
9.3 Interface USB et ins tallation du pilote de l’instrument
Le micrologiciel de l'instrument peut être mis à jour sur site en utilisant le port USB. Cette
opération n’a pas besoin du pilote décrit ici. Il faut utiliser un logiciel utilitaire du PC fourni par le
fabricant et un pilote d’interface homme-machine, IHM, qui sera déjà installé sur le PC. ’S’il s’agit
de la seule fonctionnalité USB requise, télécharger le fichier qui contient la mise à jour du
micrologiciel en utilisant l'utilitaire PC du fabricant et suivre les instructions incluses.
L’utilisation de l'interface USB comme commande à distance requiert un pilote de classe
périphérique de communications sur le PC pouvant servir de port COM virtuel. Dans Windows,
un pilote approprié est fourni par Microsoft, mais il n'est pas installé par défaut. Le fichier de
données (.INF) de contrôle de l'installation est fournie sur le CD de documentation du produit
inclus avec l'instrument ; cependant, le même pilote est également utilisé par un grand nombre
d’autres instruments de ce fabricant et peut déjà être reconnu par le PC.
Pour installer le pilote pour la première fois, allumer l’instrument, puis connecter le port USB à
l'ordinateur. Les fonctions ’Plug & Play’ de Windows devraient reconnaître automatiquement
l’ajout d’un nouveau matériel sur l’interface USB et (probablement après une recherche sur
Internet pendant quelque temps) établir la connexion avec l’emplacement d’un pilote approprié.
Suivre les instructions de Windows et cliquer sur le CD, puis sur le sous-répertoire pour ce
produit, et enfin sur le sous-répertoire du pilote USB en dessous. Le nom du fichier est
USB_ARM_VCP_xxx.INF, où xxx est le numéro de la version. (Un fichier readme.pdf se trouve
aussi dans ce répertoire si une assistance supplémentaire est requise.)
Dans certains cas, Windows ne terminera pas cette procédure (en particulier avec les récentes
versions qui cherchent d’abord sur Internet l’identifiant unique du fournisseur et du produit),
auquel cas l'instrument signale un dysfonctionnement en affichant le message « ne fonctionne
pas correctement » dans le gestionnaire de périphériques. Dans ce cas, sélectionner cet
instrument, cliquer avec le bouton droit et choisir la mise à jour du logiciel du pilote « update
driver software », puis « browse this computer for driver software » pour parcourir cet ordinateur
à la recherche du logiciel du pilote et enfin trouver le fichier .INF sur le CD, comme cela a été
décrit ci-dessus.
Une fois que Windows a installé le pilote de périphérique, un numéro de port COM sera attribué à
cet instrument particulier. Ce numéro dépendra des attributions précédentes de ports COM sur ce
PC et il sera peut-être nécessaire d'utiliser le gestionnaire de périphériques pour le découvrir.
Chaque instrument possède un identifiant USB unique en mémoire sur le système, alors il
recevra le même numéro de port COM à chaque fois qu'il sera connecté au même PC (quelle
que soit la prise d'interface effectivement utilisée), même si le port COM disparaît lorsque
l'instrument est déconnecté ou éteint. Les autres instruments se verront attribuer un numéro de
port COM différent.
Il faut noter qu'un autre PC n’attribuera pas nécessairement toujours le même numéro de port
COM à un instrument particulier (ceci dépend de l'historique des installations), mais le
gestionnaire de périphériques peut être utilisé pour modifier les attributions de ports.
Ce port COM virtuel peut être piloté par des applications Windows (y compris un émulateur de
terminal) exactement de la même manière que n'importe quel port COM standard, sauf que la
vitesse de baud et d'autres paramètres sont inutiles et donc ignorés. Certaines applications
anciennes pourraient ne pas fonctionner avec les ports COM numéros 3 ou 4, ou supérieurs à 9.
35
Page 37

câble est débranché, l'indicateur d'état de LAN est alors .
clignote entre et
communiquer. Le symbole devient
impossible et l'écran indique
Dans ce cas, utilisez le gestionnaire de périphériques pour modifier le numéro attribué. Une fois
installé, le pilote sera maintenu à jour par ’Windows Update’ de la manière habituelle.
9.4 Interface LAN
L’interface LAN est conçue conformément à la norme LWI version 1.4 LXI Core 2011 et
comprend les interfaces et les protocoles décrits ci-dessous. Pour de plus amples informations
sur les normes LXI, consulter le site www.lxistandard.org
Lorsque l’instrument est allumé et connecté à un réseau, il cherche par défaut à obtenir l’adresse
IP et le NetMask (masque de réseau) à partir du DHCP ou, si le délai du DHCP a expiré (après
30 secondes), en utilisant Auto-IP. Au cas improbable où aucune adresse Auto-IP n'est trouvée,
une adresse IP statique est attribuée ; l’adresse IP par défaut est 192.168.0.100, mais elle peut
être modifiée sur la page Internet. Il est recommandé de connecter l’instrument par un routeur,
car l'adresse IP est ainsi attribuée plus rapidement ; si l'instrument est connecté directement au
PC, l’attribution de l’adresse IP ne commence qu'après l’expiration du délai de 30 secondes du
DHCP.
Comme il est possible de mal configurer l’interface LAN et ainsi d'empêcher toute communication
avec l'instrument sur le réseau local, il existe une fonction LCI ou ’LAN Configuration Initialise’
(Configuration et Initialisation du Réseau Local), activée en appuyant sur un bouton-poussoir
(marqué LAN RESET) et accessible par un petit trou dans le panneau arrière. Cette fonction
restaure la configuration par défaut avec le DHCP activé, l'instrument exécutera alors la
séquence décrite dans le paragraphe précédent. Il faut noter que la réinitialisation du LAN
supprime toute protection par mot de passe.
L’avancement de la connexion LAN peut être visualisé sur le menu des paramètres de l'interface
(dans l'écran accueil, cliquer sur Utilities, puis sur Interface Settings) ou en interprétant le
symbole figurant sur la ligne d'état de l'écran d'accueil qui comporte quatre indications possibles :
Aucun LAN
Configuration
en cours
LAN OK La connexion au réseau local est maintenant configurée et l'appareil peut
ERREUR DE
LAN
Si l'instrument ne détecte aucune connexion à un réseau local, par ex. si le
L'instrument a détecté une connexion au réseau local, mais n'est pas encore
configuré, par ex. il attend le DHCP. L'indicateur d'état de LAN est animé, il
L'instrument a détecté un problème de connexion au réseau local, par ex. son
adresse IP est utilisée par un autre instrument. La communication est
9.4.1 Adresse IP et nom d'hôte LAN
Pour communiquer avec l'instrument en utilisant l'interface LAN, il faut connaître l'adresse IP (qui
a été attribuée au cours de la procédure de connexion décrite ci-dessus). Une fois l’instrument
connecté et correctement configuré, son adresse IP s’affiche dans le menu paramètres de
l'interface (cliquer sur Home, puis sélectionner le menu Utilities et Interface Settings).
Alternativement, l'adresse peut être obtenue à partir du serveur DHCP ou en utilisant l'outil ’LXI
Discovery Tool’ décrit ci-dessous.
9.4.2 Support mDNS et DNS-SD
L'instrument supporte ces protocoles de résolution de noms multidiffusion qui permettent
d’attribuer un nom d'hôte significatif à l'instrument sans requérir une entrée dans la base de
données d'un serveur de noms central. Le nom d'hôte choisi peut être saisi sur la page W eb (à
laquelle il faudra accéder à partir de l’adresse IP, la première fois) ; les espaces ne sont pas
autorisés. Le nom apparaît alors dans le .domaine local (par ex. myLDH400.local), si le
périphérique accessible est configuré pour prendre en charge le protocole (ce qui est le cas avec
les ordinateurs modernes). Le nom par défaut est suivi du numéro de série.
36
Page 38

9.4.3 Serveur ICMP Ping
L'instrument comprend un serveur ICMP permettant d’utiliser ’Ping’ avec son adresse IP comme
moyen de base de vérification de la communication ou avec son nom d'hôte si la résolution de
nom est active.
9.4.4 Serveur Web et protection de la configuration par mot de passe
L’instrument contient un serveur Web de base. Celui-ci fournit des informations sur l’instrument et
permet de le configurer. Les pages de configuration et de contrôle de l’instrument peuvent être
protégées par un mot de passe afin de prévenir les changements non autorisés de la
configuration de commande à distance ; il est configuré par défaut sans mot de passe, « no
password ». La page de configuration elle-même contient les explications nécessaires pour
définir le mot de passe. Le mot de passe peut comporter jusqu’à 15 caractères ; il faut noter que
le nom d’utilisateur ’Use Name’ doit être laissé en blanc. Le mot de passe et le nom d’hôte
seront cependant réinitialisés par défaut sans mot de passe (no password) si le bouton ’LAN
Reset’ sur le panneau arrière est utilisé pour réinitialiser tous les paramètres LAN à leur réglage
en usine par défaut.
9.4.5 Identifier les LAN
La page Web principale de l’instrument comprend également une fonction d’identification
« Identify » qui permet à l’utilisateur d’envoyer une commande à l’instrument qui déclenche le
clignotement de l’écran jusqu’à l’annulation de la commande.
9.4.6 Outil de découverte LXI
Cet outil peut être utilisé pour afficher les adresses IP et d’autres informations associées sur tous
les appareils connectés conformes au protocole de découverte VXI-11. Cet outil est une
application pour PC fonctionnant sur Windows et présente sur le CD fourni, elle doit être installée
et exécutée sur le PC de commande lorsque l’instrument est connecté directement sur le
connecteur réseau du PC ou via un routeur. Double cliquer sur l'une des entrées dans la liste des
instruments découverts pour ouvrir le navigateur du PC sur Internet et afficher la page d'accueil
de cet instrument. Pour une version ultérieure de l'outil qui predn en charge la découverte en
utilisant à la fois VXI-11 et mDNS, consulter le site www.lxistandard.org. Des outils de découverte
LAN sont également inclus dans le progiciel comprenant ’National Instruments Measurement’ et
’Automation Explorer’ et l’application ’Agilent Vee’.
9.4.7 Protocole de découverte VXI-11
Le support VXI-11 de l'instrument est très limité, mais suffisant pour le protocole de découverte,
sans aucune autre fonction.
L’instrument exécute un scanner de port Sun RPC sur le port TCP 111 et le port UDP 111 ainsi
qu’il est défini dans RFC1183. Les appels pris en charge sont :
NULL (nul), GET PORT (obtenir port) et DUMP (vidage).
Sur le port TCP 1024, un protocole VXI-11 très simple est exécuté, suffisant seulement pour la
découverte d’instruments. Celui-ci exécute les appels suivants :
CREATE LINK (créer un lien), DEVICE_WRITE (écrire sur l’instrument), DEVICE_READ
(lire sur l’instrument) et DESTROY_LINK (détruire le lien).
Une fois qu’un lien a été créé, toute donnée écrite sur l’instrument est ignorée et toute tentative
de lecture de l’instrument renvoie la même chaîne d’identification que l’interrogation “*IDN?”.
9.4.8 Nom de ressource VISA
Compte tenu du support limité de VXI-11 (protocole de découverte uniquement), l’instrument doit
être identifié par les données brutes de la prise lorsqu'il est utilisé avec des logiciels qui
communiquent en utilisant un nom de ressource VISA. Par exemple, un instrument dont l'adresse
IP est 192.168.0.100 dispose normalement d'un nom de ressource VISA
"TCPIP0::192.168.0.100::inst0::INSTR", mais pour cet instrument, le nom doit être modifié ainsi :
"TCPIP0::192.168.0.100::9221::SOCKET" où 9221 est le port TCP utilisé par cet instrument pour
commander et contrôler l’instrument, voir ci-dessous.
37
Page 39

9.4.9 URL du document d’identification XML
En conformité avec la norme LXI, l'instrument fournit un document d’identification XML qui peut
être interrogé au moyen d'une commande GET (obtenir) sur “http://IPaddress:80/lxi/identification”
compatible avec les normes du schéma XSD LXI (disponible sur
http://www.lxistandard.org/I nstrumentIdentificat ion/1.0) et du schéma W3C XML
"http://www.w3.org/XML/Schema"). Ce document décrit l’instrument. Le nom d'hôte peut être
utilisé au lieu de l'adresse IP si la résolution de nom fonctionne.
9.4.10 Prises TCP
L’instrument utilise 2 pr ises sur le port TCP 9221 pour commander et contrôler l’instrument. Les
commandes textuelles sont envoyées sur ce port comme il est indiqué au chapitre « Commandes
à distance » et toute réponse est renvoyée par le même port. Toute chaîne de commandes doit
être composée d’une ou plusieurs commandes complètes. Les commandes multiples peuvent
être séparées soit par des points-virgules « ; », soit par des sauts de ligne. Aucun terminateur
final n'est requis, car la trame TCP implique un terminateur, mais il est possible d’en envoyer un,
le cas échéant.
9.5
Verrouill age de l’interface
Toutes les interfaces sont actives en permanence, pour éliminer la nécessité de sélectionner
l’interface active et pour s’assurer que l’interface LAN est toujours disponible (comme l’exige la
norme LXI). Afin de réduire le risque que l’instrument soit sous le contrôle de deux interfaces en
même temps par inadvertance, un simple mécanisme de verrouillage et de déverrouillage est
fourni dans le jeu d’instructions. Le verrou est automatiquement débloqué lorsqu’il est possible
de détecter une déconnexion et lorsque le bouton ’
peut également être restreint à partir des pages Web.
Toute interface peut requérir le contrôle exclusif de l’instrument en envoyant une commande
« IFLOCK ». Le verrou ne peut être débloqué qu’en envoyant une commande « IFLOCK 0 » à
partir de l’instance d’interface qui contrôle actuellement le verrou et peut être interrogée à partir
de n’importe quelle interface par l’envoi d’une commande « IFLOCK? » La réponse à cette
commande sera “-1” si le verrou est détenu par une autre instance d’interface, “0” si l’interface est
libre et “1” si le verrou est détenu par l’instance d’interface effectuant la requête. L’envoi de toute
commande depuis une interface sans droits de commande qui tente de modifier le statut de
l’instrument définit un bit 4 du ’Standard Event Status Register’ et place 200 dans le ’Execution
Error Register’ pour indiquer que les droits sont insuffisants pour l’action requise.
Remarque : il est également possible de configurer les droits d’une interface spécifique soit en
« lecture seule », soit en « pas d’accès » à partir de l’interface de la page Web.
Local’ est enfoncé. L’accès aux interfaces
38
Page 40

10. Rapport d'état
Le modèle standard de rapport d’état et d’erreur décrit dans la norme IEEE 488.2 a été conçu
pour l'interface GPIB et contient certaines fonctionnalités prévues pour être utilisées avec les
capacités du matériel de ’Service Request’ (Demande de service) et de ’Parallel Poll’ (Scrutation
parallèle) de cette interface et pour accommoder son fonctionnement en semi-duplex. Bien que
ces facilités soient peu utiles avec d'autres interfaces, cet instrument rend l'ensemble des
fonctionnalités disponibles à toutes les interfaces. Un jeu séparé d’un grand nombre de registres
d’état et d’erreurs est conservé pour chaque instance potentielle d'interface. Les interfaces GPIB,
USB et RS232 fournissent chacune une instance unique, tandis que l'interface LAN en pourvoit
trois : une pour la page Web et une pour chacune des deux interfaces de prise TCP. Un modèle
d’état séparé pour chaque instance d’interface évite de perdre des données, car certaines
commandes d’interrogation d’état (par ex. ‘*ESR?’) vident le contenu du registre après la lecture
des données actuelles.
Le jeu complet de registres d'erreurs et d'état et les bits spécifiques qu'ils contiennent sont
indiqués dans le diagramme de modèle d’état (Status Model Diagram) et décrits en détail cidessous, mais en résumé, l’état est maintenu en utilisant quatre registres primaires, le registre
d’état d'entrée (Input State Register), le registre de sécurité d'entrée (Input State Register), le
registre d'état d'événement standard (Standard Event Status Register) et le registre d'erreur
d'exécution (Execution Error Register). Un résumé est pourvu dans le registre d’octets d’état
(Status Byte Register), tel qu’il a été sélectionné par les trois registres de masquage – registre
d’activation d’état d'entrée (Input State Enable Register), registre d’activation de sécurité
d’entrée (Input Trip Enable Register) et le registre d’activation d'état d'événement standard
(Standard Event Status Enable Register). Deux autres registres de masquage, le registre
d’activation de demande de service (Service Request Enable Register) et le registre d’activation
de réponse à la scrutation parallèle (Parallel Poll Response Enable Register), contrôlent
respectivement la demande de service (Service Request) et la scrutation parallèle (Parallel Poll)
du matériel GPIB ainsi que le message ist associé. Il est recommandé que, lorsque l’instrument
est contrôlé par une interface autre que l’interface GPIB, le programme du contrôleur doit
simplement lire les principaux registres d’état directement.
Les registres ’Input State’ et ’Input Trip’ spécifiques à l’instrument contiennent les événements
relevant de la fonction électrique du chargeur et de son interaction avec la source testée.
Le registre ’Standard Event Status’ pris en charge par les registres d’erreur d'exécution
(Execution Error) et d'erreur d’interrogation (Query Error) contient les événements concernés par
l'analyse et l'exécution de la commande et par le flux de commandes, d’interrogations et de
réponses dans l'interface. Ces registres sont principalement utilisés au cours du développement
des logiciels, car une procédure de test de production ne devrait jamais générer l’une de ces
erreurs.
10.1 Les registres ’Input State’ et ’Input Trip’ (ISE & RIR et ISR & ITE).
Ces deux registres indiquent les conditions électriques qui se sont produites pendant l’utilisation
du chargeur. Par nature, ils sont communs à toutes les interfaces.
Le registre ’Input Trip’ (ITR) signale les événements qui ont conduit inopinément à la
désactivation de l'entrée du chargeur.
Le registre ’Input State’ (ISR) indique l'état actuel de l'étage de puissance du chargeur de la
même manière que les voyants verts et jaunes sur le panneau avant et la ligne d'état de l'écran.
Chacun de ces registres comporte un bit résumé dans le ’Status Byte Register’ avec un registre
d’activation (Enable Register) associé pour déterminer quels bits, le cas échéant, contribuent à
ce résumé. Tous ces registres sont des champs de bits, où chaque bit est indépendant (plusieurs
bits peuvent ainsi être définis simultanément) et a la signification détaillée ci-dessous.
39
Page 41

pannes de matériel.
Bits 6-3
Non utilisés, 0 en permanence.
alimentation a été désactivée parce
que l’intensité excédait la limite spécifiée par l'utilisateur.
que la tension appliquée excédait la limite spécifiée par l'utilisateur.
Bit 0
Non utilisés, 0 en permanence.
différence de sens de tension interne et externe, ou une panne du ventilateur.
Bits 6-4
Non utilisés, 0 en permanence.
Cet état correspond à l’avertissement Dropout à l’écran.
Cet état correspond à l’avertissement Power Limit à l’écran.
Cet état correspond à l’avertissement Low Voltage à l’écran.
l’entrée.
10.1.1.1 Registre ITR (Sécurité d’entrée)
Bit 7
Bit 2 Over Current protect : Protection de surintensité, l’
Bit 1 Over voltage protect : Protection de surtension, l’alimentation a été désactivée parce
Les bits dans le registre ’Input Trip’ sont définis lorsque les événements qu’ils indiquent se
produisent et conservent cette valeur jusqu'à ce qu’ils soient lus par la commande d’interrogation
ITR?. Après l’envoi du message de réponse, tous les bits qui indiquent des conditions qui ne
s’appliquent plus seront effacés ; tout bit qui signale une condition toujours applicable restera
défini.
Le registre d’activation de sécurité d’entrée (Input Trip Enable Register) fournit le masquage entre
le registre ’Input Trip’ et le reg istre ’Status Byte’. Si un bit quelconque a la valeur ’1’ dans les deux
registres, le bit INTR (bit 1) sera défini dans le registre ’Status Byte’. Ce registre d’activation est
défini par la commande ITE <NRF> à une valeur de 0 - 255 et relu par la commande
d’interrogation ITE? (qui renvoie toujours la dernière valeur définie par le contrôleur). À
l’allumage, le registre ITE est réglé sur 0 et l’ITR est vidé (mais les bits qu'il contient peuvent être
définis après initialisation, au cas inhabituel où une des conditions serait réelle).
10.1.1.2 Registre d’état d'entrée ’Input State’
Fault trip : Coupure de panne, l'alimentation a été désactivée par un des détecteurs de
Bit 7
Bit 3 Voltage below Dropout : Si la tension de la source est inférieure à la tension de mise
Bit 2 Input nonlinearity : Non linéarité d’entrée, le chargeur ne produit pas le courant
Bit 1 Input saturation : Saturation d'entrée, le chargeur ne peut pas produire le courant
Bit 0 Input Disabled : Entrée désactivée, indique l'état actuel du paramètre d'activation de
Les bits dans le ISR (registre d'état d’entrée) reflètent continuellement l'état actuel de la condition
qu'ils indiquent. Le registre peut être consulté à partir de la commande d’interrogation ISR?, mais
cela ne modifie pas l'état du contenu. À l’allumage, il a normalement la valeur ’1’ (entrée
désactivée), sauf si l’option de démarrage ’Power up’ dans le menu ’Utilities’ a été définie pour
conserver l'état précédent.
Le registre d’activation d’état d’entrée (Input Status Enable Register) fournit le masquage entre le
registre ’Input Status’ et le registre ’Status Byte’. Si un bit quelconque a la valeur ’1’ dans les deux
registres, le bit INSR (bit 0) sera défini dans le registre ’Status Byte’. Ce registre d’activation est
défini par la commande ISE <NRF> à une valeur de 0 - 255 et relu par la commande
d’interrogation ISE? (qui renvoie toujours la dernière valeur définie par le contrôleur). À
l’allumage, il a la valeur 0.
Conditions de panne Un ou plusieurs des détecteurs du matériel indique(nt) une
panne. Causée par une température ou une tension d'entrée excessive, une
au repos définie, le chargeur ne produit pas de courant.
prévu parce que le circuit de limitation de puissance le restreint.
nécessaire parce que la tension de la source est insuffisante.
40
Page 42

Bit 7
Mise sous tension. Défini lors de la première mise sous tension de l’appareil.
Bits 6, 3 et 1 : Non utilisés, 0 en permanence.
d'entrée.
correcte ne peut pas être exécutée pour une raison quelconque.
l'ordre correct.
Bit 0
Opération terminée. Définie en réponse à la commande *OPC.
0
Aucune erreur ne s'est produite depuis la dernière lecture de ce registre.
registres Input Trip et State.
autorisée pour cette commande dans les circonstances actuelles.
commande.
contient pas de données valides.
un verrou détenu par une autre interface.
10.2 Standard Event Status Register (registre d'état d'événement standard) (ESR et ESE)
Le ’Standard Event Status Register’ est défini par la norme IEEE 488.2, norme GPIB. Il s’agit
d’un champ de bit dans lequel chaque bit est indépendant et a la signification suivante :
Bit 5 Erreur de commande. Définie lorsqu'une erreur de syntaxe est détectée dans une
commande ou un paramètre.
L'analyseur syntaxique est réinitialisé et l'analyse continue à l'octet suivant du flux
Bit 4 Erreur d'exécution. Définie lorsqu'une valeur différente de zéro est saisie dans le
registre d'erreur d'exécution ’Execution Error’, si une commande syntaxiquement
Bit 2 Erreur d’interrogation. Définie lorsq u'une err eur d’interrogat ion se produit, parce
que le contrôleur n'a pas émis de commandes ni lu les messages de réponse dans
Le registre d’état d’événement standard (Standard Event Status Register) est lu et vidé par
l’interrogation * ESR? qui renvoie un nombre décimal correspondant au contenu. À l’allumage, il
est défini à 128 pour indiquer le bit de mise sous tension.
Le registre d’activation d’état d’entrée standard (Standard Event Status Enable Register) fournit
le masquage entre le registre ’Event Status’ et le registre ’Status Byte’. Si un bit quelconque a la
valeur ’1’ dans les deux registres, le bit ESB sera défini dans le registre ’Status Byte’. Ce registre
d’activation est défini par la commande ESE <NRF> à une valeur de 0 - 255 et relu par la
commande d’interrogation ESE? (qui renvoie toujours la dernière valeur définie par le contrôleur).
À l’allumage, il a la valeur 0.
10.3 Execution Error Register (registre d’erreur d’exécution) EER
Ce registre spécifique à l'instrument contient un numéro représentant la dernière erreur de
traitement de commande rencontrée par cette interface. Les numéros d’erreur ont la signification
suivante :
100 Erreur d’activation : Pour une raison quelconque, la commande d’activation de
l'entrée ne peut pas être exécutée. La cause peut être déterminée en lisant les
101 Erreur numérique : la valeur du paramètre envoyé était en dehors de la plage
102 Erreur d'interruption : l'entrée a été désactivée pour exécuter une commande (par
ex. un changement de mode ou de plage) qui ne peut pas être exécutée alors que
l'entrée est activée.
Cette erreur peut être évitée en désactivant l'entrée ’OFF’ avant d'envoyer la
103 Erreur de rappel : le mémoire spécifié dans une commande de rappel ’RECALL’ ne
200 Accès refusé : une tentative a été faite de modifier les paramètres de l'instrument à
partir d'une interface dont les droits d’écriture sont verrouillés (en mode lock-out) par
Le registre ’Execution Error’ est lu, puis vidé en utilisant la commande ‘EER?’. À l’allumage, ce
registre a la valeur 0 pour toutes les instances d'interface.
41
Page 43

Bits 7, 3 et 2 : Non utilisés, 0 en permanence.
aussi longtemps que la condition est réelle.
dans le registre ’Standard Event Status Enable’.
message de réponse) a été transmis.
regis tre d’activation de la sécurité d’entrée ’Input Trip Enable’.
d’activation de l’état d’entrée ’Input State Enable’.
Il n'y a aucun registre de masquage correspondant : si une de ces erreurs se produit, bit 4 du
regis tre Standard Event Status est établi. Ce bit peut être masqué de toutes les conséquences
ultérieures en vidant bit 4 du ’Standard Event Status Enable Register’.
10.4 Registres Status Byte (STB) et Service Request Enable (SRE) de GPIB
Ces deux registres sont mis en œuvre comme exigée par la norme IEEE 488.2. 488.2.
Tous les bits définis dans le registre ’Status Byte’ qui correspondent aux bits positionnés dans le
registre ’Service Request Enable’ entraîneront le positionnement du bit RQS/MSS dans le
registre ’Status Byte’ ce qui génère une demande ’Service Request’ sur le bus.
Le registre ’Status Byte’ est lu soit à partir de l’interrogation *STB?, qui renverra MSS dans le
bit 6, soit par un Serial Poll (Scrutation en série) qui renverra RQS dans le bit 6. Le registre
d’activation de demande de service (Service Request Enable) est défini par la commande
*SRE<NRF> et lu par l’interrogation *SRE?.
Bit 6 MSS/RQS. Ce bit (tel qu’il est défini par la norme IEEE 488.2) contient
alternativement le message MSS ’Master Status Summary’ (résumé d’état principal)
renvoyé en réponse à l’interrogation * STB? et le message RQS ’Requesting
Service’ (demande de service) en réponse à un Serial Poll (Scrutation en série).
Le message RQS est effacé lorsque le bit est interrogé, mais le bit MSS reste établi
Bit 5 ESB. Le bit Event Status (bit d’état d’événement). Ce bit est défini si des bits
positionnés dans le registre ’Standard Event Status’ correspondent aux bits définis
Bit 4 MAV. Bit Message Available (bit de message disponible). Ce bit est défini lorsqu'un
message de réponse de l’instrument est formaté et qu'il est prêt à être transmis au
contrôleur.
Ce bit est réinitialisé lorsque le ’Response Message T er minator’ (terminateur de
Bit 1 INTR. Bit de sécurité d’entrée ’Input Trip’. Ce bit est défini si des bits définis dans le
registre de sécurité d’entrée ’Input Trip’ correspondent aux bits définis dans le
Bit 0 INST. Bit d’état d'entrée ’Input State’. Ce bit est défini si des bits définis dans le
regis tre d’état d’entrée ’Input State’ correspondent aux bits définis dans le registre
10.4.1 Scrutation parallèle GPIB (PRE)
Cet instrument offre de capacités complètes de scrutation parallèle ’Parallel Poll’ telle qu’elle est
définie par la norme IEEE 488.1 Le registre d’activation de scrutation parallèle ’Parallel Po ll
Enable’ (qui est défini par la commande *PRE<NRF> et lu par l’interrogation *PRE?) spécifie les
bits du ’Status Byte Register’ (registre d’octets d’état) qui doivent être utilisés pour constituer le
message local
sinon '0'. L'état du message ist peut aussi être lu directement en utilisant la commande
d’interrogation *IST?.
ist. Si un bit a la valeur ’1’ dans les registres STB et PRE, alors ist a la valeur ’1 ',
Le protocole de la couche physique de la scrutation parallèle (déterminant quelle ligne de
données doit être utilisée et son sens logique) est configuré par les commandes ’PPC’ et ’PPE’ et
envoyé par les commandes PPU et PPD de la manière définie par la norme. L'instrument exécute
la terminaison passive des lignes DIO pendant la scrutation parallèle.
42
Page 44

ISE
Input Status Enable Register (registre
d’activation d'état d’entrée)
= 0
de sécurité d’entrée)
Execution Error Register (registre d’erreur
d’exécution)
d'événement standard)
(bit réglage au
démarrage)
Register † (registre d’erreur
d’interrogation)
Standard Event Status Enable Register †
(registre d’activation d'état d'événement
standard)
STB
Status By te Re gis te r ( re gi str e d ’o c te ts d’ éta t)
= 0
d'activation de demande de serv ice)
Parallel Poll Enable Register † (registre
d’activation de scrutation parallèle)
10.4.2 Registre ’Query Error’ (registre d'erreur d'interrogation) - Norme IEEE 488.2 GPIB Traitement des erreurs
Il est plus probable que ces erreurs se produisent au niveau de l’interface semi-duplex GPIB qui
exige que l’instrument maintienne une réponse jusqu'à ce le contrôleur l’interroge. Toutes les
autres interfaces fournissent des communications duplex intégrales avec mise en mémoire
tampon dans la couche physique qui maintiennent généralement une réponse de l'instrument
jusqu'à ce que le logiciel de commande le lise ; il n'y a pas d'équivalent à l'état d’interrogation du
GPIB ‘addressed to talk’, de sorte que l'instrument n'est pas informé des actions du contrôleur.
Si l’instrument est interrogé et n’a aucune information à transmettre parce que le formateur de
réponse est inactif et que la file d’attente d’entrée est vide, l’erreur ’UNTERMINATED’ de la
norme IEEE 488.2 s’affiche. Ceci entraîne le positionnement du bit Query Error (erreur
d’interrogation) dans le ’Standard Event Status Register’ (registre d’état d’événement standard),
une valeur de 3 dans le ’Query Error Register’ (registre d'erreur d'interrogation) et la
réinitialisation de l'analyseur syntaxique.
L’erreur IEEE 488.2 ’DEADLOCK’ (erreur de blocage fatal) apparaît si le formateur de réponse
est en attente d'envoi de message de réponse et que la file d'attente d'entrée sature. Ceci
entraîne le positionnement du bit ’Query Error’ (erreur d’interrogation) dans le ’Standard Event
Status Register’ (reg istre d’état d’événement standard), la saisie d’une valeur 2 dans le ’Query
Error Register (registre d'erreur d'interrogation) et la réinitialisation du formateur de réponse, en
ignorant le message de réponse en attente. L’analyseur syntaxique commence alors à analyser
le <PROGRAM MESSAGE UNIT>} (unité de message de programme) suivant de la file d’attente
d’entrée.
Si le formateur de réponse attend de transmettre un message de réponse et qu’un <PROGRAM
MESSAGE TERMINATOR>} (terminateur de message de programme) a été lu par l’analyseur
syntaxique ou que la file d’attente d’entrée contient plus d’un message ’END’ (fin), l’erreur
IEEE 488.2 ’INTERRUPTED’ (interrompu) se produit. Ceci entraîne le positionnement du bit
’Query Error’ (erreur d’interrogation) dans le ’Standard Event Status Register’ (registre d’état
d’événement standard), la saisie d’une valeur 1 dans le ’Query Error Register (registre d'erreur
d'interrogation) et la réinitialisation du formateur de réponse, en ignorant le message de réponse
en attente. L’analyseur syntaxique commence alors à analyser le <PROGRAM MESSAGE
UNIT>} (unité de message de programme) suivant de la file d’attente d’entrée.
10.5 Réglages à la mise en marche
Les valeurs suivantes d'état d'instrument sont réglées lors de la mise en marche :
ITE Input Trip Enable Register (registre d’activation
EER
ESR
QER Query Error
Standard Event Status Register (registre d'état
= 0
= 0
= 128
= 0
ESE
SRE Service Request Enable Register † (registre
PRE
43
= 0
= 0
= 0
Page 45

l'interface GP IB.
† Les registres marqués ainsi sont normalement utilisés uniquement par
Les registres ’Input State’ (ISR) et ’Trip’ (ITR) indiqueront toutes les conditions actuellement
applicables.
L'instrument sera à l'état local, avec le clavier actif. Les paramètres de l’instrument à l’allumage
sont les mêmes que lorsqu’il a été éteint pour la dernière fois, à l’exception de l’état d’activation
de l’entrée, qui est toujours désactivé par défaut au démarrage, mais qui peut être configuré par
l’utilisateur pour être identique à l’allumage à son état lors du dernier arrêt.
10.6 Modèle de Statut LDH400P
44
Page 46

Set
Interrogation
Nom
Input Trip Enable Register (registre
d’activation de sécurité d’entrée)
Input Status Enable Register (registre
d’activation d'état d’entrée)
Execution Error Register (registre d’erreur
d’exécution)
Query Error Register (registre d’erreur
d’interrogation)
Standard Event Status Register (registre
d'état d'événement standard)
Standard Event Status Enable Register
standard)
Status Byte Register (registre d’octets
d’état)
Status Byte Enable Register (registre
d’activation d’octets d’état)
Parallel Poll Enable Register (registre
d’activation de scrutation parallèle)
10.7 Résumé de registre
† ITR? Registre ITR (Sécurité d’entrée)
ITE ITE?
ISR? Registre d’état d' entrée ’Input State’
ISE ISE?
† EER?
† QER?
† *ESR?
*ESE *ESE?
*STB?
*SRE *SRE?
*PRE *PRE?
† Ces registres sont effacés après interrogation ou par la commande *CLS.
(registre d’activation d'état d'événement
45
Page 47

11. Commandes à distance
11.1 Opération distante et locale
À l’allumage, l’instrument est en mode local et l’utilisation normale du clavier est possible. Toutes
les interfaces distantes sont actives et à l’écoute d’une commande à distance. Lorsqu’une
commande est reçue de n'importe quelle interface, l'instrument entre en état à distance. Dans cet
état, le clavier est verrouillé, l'écran passe à l'écran d'accueil et affiche ’R E M O T E’ à la place
des onglets de touches programmables. Il est possible de ramener l’instrument à l'état local en
appuyant sur la touche ’
distance s’il reçoit une communication ou un autre message d’une interface, quelle qu’elle soit. Il
est de la responsabilité de l'utilisateur d'éviter tout conflit, si les paramètres sont modifiés à partir
du panneau avant alors que l’instrument est en état Local.
11.2 Utilisation des commandes à distance
Chaque interface de commande à distance comporte une file d'attente d'entrée séparée qui se
remplit, sous interruption, de manière transparente à toutes les autres opérations de l'instrument.
L'interface RS232 active le contrôle du flux en envoyant XOFF lorsque la file d'attente contient
environ 200 caractères, puis XON lorsqu’environ 100 espaces deviennent disponibles. Toutes les
autres interfaces comportent des mécanismes automatiques de contrôle de flux en version
standard au sein de leur protocole de couche physique de communication.
Local’ ; cependant l'instrument reviendra immédiatement à l’état à
Les commandes sont extraites des files d'attente d'entrée par l'analyseur au fur et à mesure de
leur disponibilité. Les commandes et les interrogations de chaque file d'attente sont exécutées
dans l'ordre, mais l'ordre d'exécution des commandes de différentes interfaces n'est pas défini et
ne peut pas être utilisé en confiance. Il est fortement recommandé d’utiliser les facilités de
verrouillage de l’interface décrites ci-dessus. L'analyseur de syntaxe n’exécutera pas de nouvelle
commande avant que la commande ou l’interrogation précédente soit achevée. Les réponses
sont envoyées à l'interface qui a émis l’interrogation. Il n’y a pas de file d’attente de sortie interne,
donc pour l’interface GPIB, le formateur de réponse attendra, indéfiniment au besoin, que le
contrôleur ait lu le message de réponse complet, avant que l'analyseur puisse commencer à
exécuter la commande suivante de la file d'attente d'entrée. Sur toutes les autres interfaces, le
message de réponse est immédiatement envoyé dans des mémoires tampons de la couche
physique.
11.3 Formats des commandes à distance
Les commandes sont transmises sous forme de <PROGRAM MESSAGES> (messages de
programme) par le contrôleur et chaque message comporte zéro ou plusieurs éléments
<PROGRAM MESSAGE UNIT> (unité de message de programme) et les éléments sont séparés
(s’il est constitué de plus d'un tel élément par le <PROGRAM MESSAGE UNIT SEPARATOR>
(séparateur d'unités de message de programme) et finalement par un <PROGRAM MESSAGE
TERMINATOR> (Terminateur de message de programme.
Le <PROGRAM MESSAGE UNIT SEPARATOR> (séparateur d'unités de message de
programme) est le caractère point-virgule ';' (3 BH).
Le <PROGRAMME MESSAGE TERMINATOR> qui sépare ou termine les <PROGRAMME
MESSAGES> est le caractère de nouvelle ligne (0AH), mais dans le cas de l’interface GPIB, le
message ’END’ (fin) de matériel peut également être utilisé, soit avec le dernier caractère du
message, soit avec la nouvelle ligne. Dans le cas de l'interface LAN, les commandes ne peuvent
pas être séparées au niveau des limites de paquets TCP/IP.
Une <PROGRAM MESSAGE UNIT> (Unité de message de commande) est l’une des
commandes dans la liste des commandes à distance qui doit être envoyée complète comme il a
été spécifié. Une commande doit être séparée de tout paramètre par un <WHITE SPACE>
(espace vide défini par les codes de caractères 00H à 20H inclus, à l'exclusion du caractère de
nouvelle ligne 0AH).
46
Page 48

Aucun <WHITE SPACE>, espace vide n’est autorisé au sein d’un identifiant ou paramètre de
commande, mais tout autre espace vide <WHITE SPACE> supplémentaires est ignoré. Il faut
noter que le caractère de retour arrière (07H) est considéré comme un espace vide <WHITE
SPACE>, il ne peut donc pas être utilisé pour supprimer des caractères incorrects et ne
masquera pas l'erreur.
Les majuscules de tous les caractères sont ignorées et toutes les commandes sont insensibles à
la casse. Les commandes qui utilisent un paramètre numérique acceptent le format libre <NRF> ;
les paramètres textuels doivent être envoyés sous forme de données de programme de
caractères <CPD> spécifiées.
Les chiffres <NRF> doivent être des unités de base, ils peuvent avoir une décimale et une partie
fractionnaire, et ils peuvent inclure une partie exponentielle au besoin. Ils sont arrondis à la
précision prise en charge, ainsi (pour les fréquences transitoires) les chiffres 10 000, 10e3 ou
9 999,99 donnent tous 10,00 kHz.
11.4 Temps de la commande
Il n’existe a pas de paramètres dépendants, de paramètres couplés, de commandes de
chevauchement, d'éléments de données de programme d'expression, ni d'en-têtes de
programmes de commande composés. Il faut noter, cependant, que la commande MODE définit
les valeurs standard pour le niveau A, niveau B, la plage et la vitesse de balayage qui doivent
donc être explicitement définies ultérieurement. Alternativement, il est possible d'utiliser les
fonctions de mise en mémoire et de rappel de l'instrument pour récupérer rapidement la
configuration complète d'un mode opérationnel et ses valeurs.
Toutes les commandes sont séparées et séquentielles et sont exécutées après avoir été
analysées et immédiatement considérées comme complètes. Pour pourvoir une fonctionnalité
utile, le bit ’Operation Complete’ (bit 0 d’exécution d’opération) ) dans le ’Standard Event Status
Register’ ne peut être défini qu’à partir de la commande *OPC. La commande *OPC ou
l’interrogation *OPC? peut être utilisée pour synchroniser les appareils en raison de la nature
séquentielle des opérations à distance.
La réponse électrique réelle aux modifications des paramètres du chargeur dépend du réglage
actuel de la vitesse de balayage, mais ceci est considéré comme un aspect du fonctionnement
normal et ne fait pas partie du temps d'exécution de commande. Si une vitesse de balayage lente
est utilisée, les interrogations V? et I? peuvent être utilisées pour vérifier l’avancement.
11.5 Formats de réponses
Les réponses de l'instrument au contrôleur sont envoyées sous forme de messages de réponse
<RESPONSE MESSAGES>, qui comprennent une unité de message de réponse <RESPONSE
MESSAGE UNIT> suivie d’un terminateur de message de réponse <RESPONSE MESSAGE
TERMINATOR> qui est le retour (0Dh) suivi du caractère de nouvelle ligne (0Ah) avec, dans le
cas de l’interface GPIB uniquement, la fin ’END’ de message NL^END. Ceci est indiqué comme
<RMT> dans les descriptions ci-dessous.
Chaque interrogation produit un message de réponse spécifique <RESPONSE MESSAGE>
décrit sous l’entrée de commande d’interrogation dans la liste des commandes à distance cidessous. La plupart des réponses se composent d'un mot clé suivi soit de texte, soit d’un chiffre
dans un des formats suivants :
<NR1> Un chiffre entier sans virgule décimale ou une unité.
<NR2> Un chiffre à virgule fixe avec une partie fractionnaire, mais aucune partie exponentielle.
<NR3> Un chiffre à virgule flottante avec une partie fractionnaire et une partie exponentielle.
<CRD> ’Character Response Data’, données de caractères de réponse qui comprend les
caractères textuels de la liste.
Lorsqu’ils sont utiles, les chiffres sont suivis par une indication d'unités (qui dépend du mode
actuel du chargeur) pour fournir une confirmation. Les unités utilisées sont : A, V, W, OHM, SIE et
HZ (SIE est la conductance en Siemens, ou A/V.) Les vitesses de balayage sont exprimées en
47
Page 49

offre la meilleure précision des paramètres de niveau.
La réponse est : MODE <CRD><RMT> où <CRD> peut être C, P, R, ou G.
chargeur.
chargeur.
où <NR2> est suivi d'un suffixe d'unités déterminé par le mode de charge.
où <NR2> est suivi d'un suffixe d'unités déterminé par le mode de charge.
DROP<NRF>
Définit le niveau de tension de mise au repos à <NRF>, en volts.
La réponse est : DROP <NR2>V<RMT> où <NR2> est en volts.
actuel) en utilisant un exposant au besoin.
échéant.
1=Marche
Marche)
unité de base (du mode actif) par seconde, avec un exposant (qui est toujours positif, où E+03
représente les kUnités/s ou unités/ms et E+06 représente MUnités/s ou unités/μs).
11.6 Liste des commandes
Cette section répertorie toutes les commandes et interrogations exécutées par cet instrument.
Tous les paramètres numériques sont affichés sous la forme <NRF> et peuvent être envoyés
sous les formats
différence des réponses) ne sont pas suivis par une indication d'unités.
11.6.1 Commandes de fonctions de l'instrument
MODE <CPD> Définit le mode de charge comme <CPD>.
MODE? Renvoie le mode de charge sélectionné.
<NR1>, <NR2> ou <NR3> décrits ci-dessus. Les paramètres de commandes (à la
Où
<CPD> peut être C, P, R, ou G, correspondant à courant, puissance,
résistance, conductance ou tension constante.
L'alimentation sera automatiquement coupée si cela n’a pas été fait
auparavant.
Cette commande établit également les paramètres des niveaux A et B à 0 pour
tous les modes sauf CR (résistance constante) pour lequel les deux niveaux
sont établis à 10kΩ, et établit la vitesse de balayage à sa valeur par défaut qui
A <NRF> Déf init le Niveau A à <NRF>. Les unités sont déterminées par le mode actuel du
B <NRF> Définit le Niveau B à <NRF>. Les unités sont déterminées par le mode actuel du
A? Renvoie le niveau défini du niveau A.
La réponse est : A
<NR2>U<RMT>
B? Renvoie le niveau défini du niveau B.
La réponse est : B
<NR2>U<RMT>
DROP? Renvoie le niveau de tension de repos ’Dropout Voltage’ sélectionné.
SLEW <NRF> Définit la vitesse de balayage à <NRF>, en unité/s (unités du mode de charge
SLEW? Renvoie la vitesse de balayage ’Slew Rate’ définie.
La réponse est : SLEW
<NR3>U<RMT> où <NR3> est en unité/s dont l'unité est
déterminée par le mode de charge actuel avec une partie exponentielle le cas
SLOW <NRF> Active ou désactive le mode de démarrage lent, où <NRF> signifie : 0=Arrêt,
SLOW? Renvoie la configuration de démarrage lent ’Slow Start’ sélectionnée.
La réponse est : SLOW
<NR1><RMT> où <NR1> est soit 0 (=Arrêt) ou 1 (=
48
Page 50

ce qui correspond au niveau A, niveau B, Transitoire, Tension Ext et TTL Ext.
correspond au niveau A, niveau B, Transitoire, Tension Ext et TTL Ext.
FREQ <NRF>
Définit la ’Transient Frequency’ (fréquence transitoire) à <NRF>, en Hz.
La réponse est : FREQ <NR2> HZ <RMT> où <NR2> est en Hz.
pourcentage (arrondi au nombre entier).
La réponse est : DUTY <NR1>%<RMT> où <NR1> es t un pourc entage.
VLIM NONE désactive et supprime toute limite de tension.
VLIM 0V<RMT> si aucune limite de tension n'est définie.
ILIM NONE désactive et supprime toute limite d’intensité.
ILIM 0A<RMT> si aucune limite d’intensité n'est définie.
INP <NRF>
Active ou désactive l’entrée où <NRF> signifie : 0=Arrêt, 1=Marche
La réponse est INP <NR1><RMT> où <NR1> est soit 0 (=Arrêt) ou 1 (= Marche).
La réponse est <NR2>V<RMT> où <NR2> est en Volts.
La réponse est <NR2>A<RMT> où <NR2> est en A.
micrologiciel insta llé .
N'affecte aucun paramètre de l'interface distante.
<NRF> est 1 à 30.
Le rappel d’une mémoire vide ou non valide est une erreur d'exécution.
LVLSEL <CPD> Établit ’Active Level Select’ (sélection du niveau actif) à <CPD> où <CPD> peut
être A, B, T , V ou E
LVLSEL? Renvoi à l'état de sélection de niveau.
La réponse est : LVLSEL
<CRD><RMT> où <CRD> peut être A, B, T, V ou E ce qui
FREQ? Renvoie la fréquence transitoire ’Transient Frequency’ définie.
DUTY <NRF> Dé finit le ’Transient Duty Cycle’ (Cycle de service transitoire) (%A) à <NRF>, en
DUTY? Renvoie le cycle de service transitoire ’Transient Duty Cycle’ défini (%A).
VLIM <NRF>
VLIM
<CPD>
Établit la limite de tension (Voltage Limit) à <NRF>. Soit VLIM 0 ou
alternativement
VLIM? Renvoie la limite de tension. La réponse est :
VLIM
<NR2>V<RMT> où <NR2> est en Volts, ou
ILIM <NRF>
ILIM
<CPD>
Établit la limite d’intensité ’Current Limit’ à <NRF>. Soit ILIM 0 ou
alternativement
ILIM? Renvoie la limite d’intensité. La réponse est soit :
ILIM
<NR2>A<RMT> où <NR2> est en A, ou
INP? Renvoie l’état d'entrée.
V? Renvoie la tension d’entrée mesurée de la source.
I? Renvoie l’intensité mesurée de la charge
11.6.2 Commandes communes.
*IDN? Renvoie l’identification de l’appareil.
La réponse est sous la forme <NAME>, <model>, <serial>, <version>
<NAME> est le nom du fabricant, <model> est le type d'instrument, <serial> est
le numéro de série interface et <version> est le niveau de révision du
*RST Réinitialise les paramètres fonctionnels de l'instrument par défaut tels qu’ils
sont indiqués dans la section Factory Default Settings.
N'affecte pas le contenu des mémoires ’Save’ (Sauvegarde) et ’Recall’
(Rappel).
*SAV <NRF> Enregistre la configuration présente dans la mémoire spécifiée par <NRF>, où
*RCL <NRF> Rappelle une configuration de la mémoire spécifiée par <NRF>, où <NRF> est 1
à 30.
49
<RMT> où
Page 51

raison de la nature séquentielle de toutes les opérations.
l’exécution de la commande, car toutes les commandes sont séquentielles.
séquentielles.
toujours 0 <RMT>.
ignorée dans cet instrument.
N'efface aucun registre actif.
Ne change pas la valeur, qui continue à refléter l'état de l'instrument.
<NRF>
La réponse est : <NR1><RMT>.
Efface tous les bits qui ne s'appliquent plus.
à <NRF>
La réponse est : <NR1><RMT>.
format de la réponse est <NR1><RMT>.
format de la réponse est <NR1><RMT>.
été envoyé.
de service) à <NRF>
La réponse est : <NR1><RMT>.
parallèle) à la valeur <NRF>.
La réponse est : <NR1><RMT>.
*OPC Définit le bit ’Operation Complete’ (bit 0) dans le ’Standard Event Status
Register’. Ceci se produit immédiatement après l’exécution de la commande en
*OPC? Statut ’Query Operation Complete’ indiquant que l’interrogation a été exécutée.
La réponse est toujours 1<RMT> et sera disponible immédiatement après
*WAI Attend que l’état ’Operation Complete’ soit confirmé.
Cette commande ne fait rien parce que toutes les opérations sont
*TST? Le charg eur ne comporte pas de capacités de tests propres et la réponse est
*TRG Le chargeur ne dispose pas de capacité de déclenchement. La commande est
11.6.3 Commandes d’état
*CLS ’Clear Stat us’. Efface toutes les indications d'état, y compris l'octet de statut.
ISR? I nterroge l e registr e d’état d'entrée ’Input State’ La réponse est : <NR1><RMT>.
ISE <NRF> Définit le ’Input Status Enable Register’ (regi stre d’activation d'état d’entrée) à
ISE? Renvoie la valeur dans le ’Input State Enable Register.
ITR? Interroge le registre ’Input Trip’ (Séc urité d’entrée). Le format de la réponse est
<NR1><RMT>.
ITE <NRF> Définit le ’Input Trip Enable Register’ (registre d’activation de sécurité d’entrée)
ITE? Renvoie la valeur dans le ’Input State Enable Register.
EER? Interroge et vide l'Execution Error Register (Registre d’erreur d’ex écution). Le
QER? Interroge et vide le Query Error Register (Registre d’erreur d’interrogation). Le
*STB? Rapport de la valeur de l'octet de statut. La réponse est : <NR1><RMT>.
Parce qu'il n'y a aucune file d'attente de sortie, MAV (Message disponible) ne
peut être lu que par une scrutation en série (Serial Poll) de l’in te rface GPIB, et
non pas par cette interrogation, comme tout message précédent doit avoir déjà
*SRE <NRF> Définit le ’Service Request Enable Register’ (Registre d’activation de demande
*SRE? Renvoie la valeur dans le ’Service Request Enable Register’
*PRE <NRF> Définit le ’Parallel Poll Enable Register’ (Registr e d’activation de la scrutation
*PRE? Renvoie la valeur du ’Parallel Poll Enable Register’.
50
Page 52

est réel.
interface à partir de l'interface web.
contourne ces commandes et restaure les paramètres par défaut comme il est indiqué plus haut.
<CPD>
<CPD> doit être DHCP, AUTO ou STATIC.
192.168.1.101).
réseau, avec chaque partie un <NR1> entre 0 et 255, (par ex. 255.255.255.0).
*IST? Renvoie l’état du message local ist tel qu’il est défini par la norme IEEE 488.2.
La réponse est 0<RMT> si le message local est faux, ou 1<RMT> si le message
11.6.4 Commandes de gestion d'interface
LOCAL
IFLOCK
<NRF>
Passe en local. Toute commande ultérieure rétablira l'état à distance.
Active ou désactive le verrouillage qui ne permet à l'instrument de répondre
uniquement qu’à cette interface, où
<NRF> signifie : 0 = sans verrou et 1 = avec
verrou.
C'est une ’Execution Error’ (erreur d'exécution numéro 200) si l’interrogation
est refusée en raison d’un conflit avec un verrou sur cette interface ou une
autre interface, ou si l'utilisateur a désactivé la prise de contrôle par cette
Les commandes suivantes spécifient les paramètres qui seront utilisées par l’interface LAN. Note :
un cycle de rallumage est requis une fois que ces commandes ont été envoyées avant que les
nouveaux paramètres soient utilisés (ou renvoyés en réponse aux interrogations ci-dessus).
L’instrument n’essaie pas de vérifier la validité de l’adresse IP ou du masque de réseau autrement
qu’en vérifiant que chaque partie tient dans 8 bits. Le bouton du panneau arrière LAN reset
NETCONFIG
IPADDR
<QUAD>
Spécifie le premier moyen qui sera utilisé pour chercher l’adresse IP..
Définit l’adresse IP statique potentielle de l’interface LAN (comme sur la page
web).
Le paramètre doit être strictement un quadrillage pointillé pour l’adresse IP,
avec chaque partie de l’adresse un
<NR1> entre 0 et 255, (par ex.
NETMASK
<QUAD>
Définit le masque de réseau qui accompagnera l’adresse IP statique de
l’interface LAN.
Le paramètre doit être strictement un quadrillage pointillé pour le masque de
51
Page 53

12. Entretien
Les fabricants et leurs agents outre-mer fourniront un service de réparation pour toute unité
développant un vice. Si les propriétaires souhaitent effectuer l’entretien par leurs propres
moyens, il est fortement recommandé que ce travail soit effectué exclusivement par un personnel
qualifié se référant au manuel d’entretien que l’on peut obtenir directement auprès du fabricant ou
de ses agents à l’étranger.
12.1 Nettoyage
Si l’instrument nécessite un nettoyage, utiliser un chiffon légèrement imbibé d’eau ou d’un
détergent doux.
AVERTISSEMENT ! POUR ÉVITER TOUTE DÉCHARGE ÉLECTRIQ UE OU DOMMAGE À
L’INSTRUMENT, NE JAMAIS LAISSER DE L’EAU PÉNÉTRER DANS LE
BOÎTIER. POUR ÉVITER TOUT DOMMAGE AU BOÎTIER, NE JAMAIS LE
NETTOYER AVEC DES SOL VANTS.
12.2 Fusibles
Voir la section 3.5.
12.3 Calibration
Pour assurer que la précision de l’instrument reste dans les spécifications, la calibration doit être
vérifiée (et réglée si nécessaire) chaque année. La procédure est détaillée dans le manuel
d’entretien qui répertorie également l'équipement requis pour le test de calibration.
12.4 Mise à j our du micrologiciel
Le micrologiciel de l'appareil peut être mis à jour via le port USB à l'aide d'un utilitaire de logiciel
de PC disponible auprès du fabricant. Celui-ci utilise un pilote de classe USB HID (périphérique
d'interface humaine) qui est déjà installé sur n'importe quel PC équipé d’un port USB. Les
instructions pour la procédure de mise à jour sont fournies avec l'utilitaire du PC et le fichier du
micrologiciel.
12.5 Dépannage
Si l'instrument ne semble pas fonctionner comme prévu, vérifier ce qui suit avant de suspecter
une anomalie.
1. Vérifier que la chute de tension dans les câbles d'interconnexion entre la source et la charge
n'est pas excessive. La tension actuelle aux bornes d'entrée de la charge doit satisfaire à
l'exigence minimale de la tension de fonctionnement pour le niveau de courant attendu.
Utiliser un multimètre numérique pour mesurer la tension réelle aux bornes.
2. Lors de l’utilisation d’un mode autre que courant constant (surtout puissance constante)
consulter le chapitre « Notes d’application » de ce manuel pour plus d’informations , en
particulier concernant les conditions de mise en marche et les considérations de stabilité.
52
3. Si l'entrée se déclenche dès qu'elle est activée, c'est souvent une indication de l'instabilité.
4. Si la fonctionnalité de mise au repos n’est pas requise, vérifier que la tension de mise au
repos est bien réglée à 0 Volt.
5. Entrer dans le menu Utilities, effectuer le Restore Factory Defaults (restaurer les réglages
d'usine) et reconfigurer l’ensemble.
6. Lire la totalité de ce manuel, car les opérations de la charge, et ses interactions avec la
source peuvent être assez complexes.
Page 54

48511-1830 Issue 1
 Loading...
Loading...