


Agilent E5070B/E5071B ENA Series RF Network Analyzers
Programmer’s Guide
Ninth Edition
FIRMWARE REVISIONS
This manual applies directly to instruments that have the firmware revision A.08.10.
For additional information about firmware revisions, see Appendix A.
Manufacturing No. E5070-90412
June 2007

Notices
The information contained in this document is subject to change without notice.
This document contains proprietary information that is protected by copyright. All rights
are reserved. No part of this document may be photocopied, reproduced, or translated to
another language without the prior written consent of Agilent Technologies.
Microsoft®,MS-DOS®,Windows®,Visual C++®,Visual Basic®,VBA® and Excel® are
registered
UNIX is a registered trademark in U.S. and other countries, licensed
exclusively through X/Open Company Limited.
Portions ©Copyright 1996, Microsoft Corporation. All rights reserved.
© Copyright 2002, 2003, 2004, 2005, 2006, 2007 Agilent Technologies
Manual Printing History
The manual’s printing date and part number indicate its current edition. The printing date
changes when a new edition is printed. (Minor corrections and updates that are
incorporated at reprint do not cause the date to change.) The manual part number changes
when extensive technical changes are incorporated.
August 2002 First Edition (part number: E5070-90032)
March 2003 Second Edition (part number: E5070-90042, changes for firmware
version A.03.50)
January 2004 Third Edition (part number: E5070-90052, changes for firmware
version A.03.60)
August 2004 Fourth Edition (part number: E5070-90062, changes for firmware
version A.04.00)
May 2005 Fifth Edition (part number: E5070-90072, changes for firmware
version A.05.00)
November 2005 Sixth Edition (part number: E5070-90082, changes for firmware
version A.06.00)
May 2006 Seventh Edition (part number: E5070-90092, changes for firmware
version A.06.50)
February 2007 Eighth Edition (part number: E5070-90402, changes for firmware
version A.08.00)
June 2007 Ninth Edition (part number: E5070-90412, changes for firmware
version A.08.10)
2

Typeface Conventions
Bold Boldface type is used when a term is defined. For
example: icons are symbols.
Italic Italic type is used for emphasis and for titles of
manuals and other publications.
[Key] Indicates the hardkey whose key label is Key.
[Key] - Item Indicates a series of key operations in which you
press the
called
key and so on, and then press the
[Key] key, select (highlight) the item
Item on the displayed menu using the [↓]
[Enter] key.
Sample Program Disk
A sample program disk (Agilent part number: E5070-180x0) is furnished with this manual.
The disk contains the sample programs used in this manual.
The customer shall have the personal, non-transferable rights to use, copy, or modify
SAMPLE PROGRAMS in this manual for the customer’s internal operations. The
customer shall use the SAMPLE PROGRAMS solely and exclusively for their own
purposes and shall not license, lease, market, or distribute the SAMPLE PROGRAMS or
modification of any part thereof.
Agilent Technologies shall not be liable for the quality, performance, or behavior of the
SAMPLE PROGRAMS. Agilent Technologies especially disclaims any responsibility for
the operation of the SAMPLE PROGRAMS to be uninterrupted or error-free. The
SAMPLE PROGRAMS are provided AS IS.
AGILENT TECHNOLOGIES DISCLAIMS ANY IMPLIED WARRANTY OF
MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE.
Agilent Technologies shall not be liable for any infringement of any patent, trademark,
copyright, or other proprietary right by the SAMPLE PROGRAMS or their use. Agilent
Technologies does not warrant that the SAMPLE PROGRAMS are free from
infringements of such rights of third parties. However, Agilent Technologies will not
knowingly infringe or deliver software that infringes the patent, trademark, copyright, or
other proprietary right of a third party.
3

E5070B/E5071B Documentation Map
The following manuals are available for the E5070B/E5071B.
• User’s Guide (Part Number: E5070-904x0, attached to optional ABA)
This manual describes most of the basic information necessary to use the
E5070B/E5071B. It provides a function overview, detailed operation procedure for
each function (from preparation for measurement to analysis of measurement results),
measurement examples, specifications, and supplemental information. For
programming guidance on performing automatic measurement with the
E5070B/E5071B, please see the Programming Manual.
• Installation and Quick Start Guide (Part Number: E5070-900x1, attached to
optional ABA)
This manual describes installation after it is delivered and the basic operation
procedures for applications and analysis. Refer to this manual when you use the
E5070B/E5071B for the first time.
• Programmer’s Guide (Part Number: E5070-900x2, attached to optional ABA)
This manual provides programming information for performing automatic
measurement with the E5070B/E5071B. It includes an outline of remote control,
procedures for detecting measurement start (trigger) and end (sweep end), application
programming examples, command reference, and related informatio n.
• VBA Programmer’s Guide (Part Number: E5070-900x3, attached to optional ABA)
This manual describes programming information for performing automatic
measurement with internal controller. It includes an outline of VBA programming,
some sample programming examples, a COM object reference, and related
information.
NOTE The number position shown by “x” in the part numbers above indicates the edition number.
This convention is applied to each manual, CD-ROM (for manuals), and sample programs
disk issued.
4

1. Making Effective Use of This Manual
Contents of This Manual. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
How To Use This Manual. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Looking up SCPI commands. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Using sample programs. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2. Overview of Remote Control
Types of remote control system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
GPIB remote control system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
What is GPIB? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
System configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Device selector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
LAN remote control system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
System configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Control over SICL-LAN server. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Control over telnet server . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
USB Remote Control System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
System configuration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Sending SCPI command messages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Types and structure of commands . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Grammar of messages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Remote mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Contents
3. Setting Up the Analyzer
Selecting the Active Channel/Trace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Configuring Measurement Conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Setting the number of traces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Selecting measurement parameters. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Setting the sweep condition (Stimulus). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Configuring Averaging Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Setting the System Z0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
Configuring Display Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Setting the layout of windows and graphs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Configuring trace display settings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Printing a message in the echo window . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Turning On/Off display update . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Showing/hiding frequencies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Showing or hiding the title . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Configuring date/time display. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Turning On/Off the LCD backlight. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Setting display colors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Saving and Loading the Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
Sample Program . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
4. Performing Calibration
Calibration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Performing calibration (obtaining calibration coefficients) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Defining calibration kits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
5

Contents
Saving and loading calibration coefficients . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
Reading/Writing Calibration Coefficient Only. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
Clearing calibration data and calibration coefficients . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Power Calibration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Preparation for power calibration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Loss compensation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
Measuring power calibration data. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
Turning ON/OFF power-level error correction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
Reading/writing power calibration data array . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
Receiver Calibration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
Measurement of receiver calibration data and calculation of calibration coefficient. . . . . . . . . . . . . . . . 91
Turning ON/OFF receiver error correction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
Scalar-Mixer Calibration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
Measurement of scalar-mixer calibration data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
Calculation of scalar-mixer calibration coefficient. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
Turning ON/OFF scalar-mixer error correction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
Implementing scalar-mixer calibration with ECal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
Partial overwrite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
Executing calculation of calibration coefficients using partial overwrite . . . . . . . . . . . . . . . . . . . . . . . . 95
Sample Program . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
Calibration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
ECal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
Power Calibration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
Reading/Writing Error Coefficient. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
5. Making a Measurement
Trigger System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
System-wide states and transitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
Channel-wide states and transitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
Trigger only to the specified channel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
Starting a Measurement Cycle (triggering the instrument) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
Configuring the instrument to autom a ti cally perform continuous measurement. . . . . . . . . . . . . . . . . . 131
Starting Measurement on Demand . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
Waiting for the End of Measurement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
Using the status register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
Using the :TRIG:SING Command. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
Using wait time. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
Point Trigger Function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
Point trigger . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
Switching over modes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
Averaging Trigger Function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
Averaging trigger . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
Toggling the mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
6. Analyzing Data
Retrieving Measurement Results at Specified Points. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
Showing/hiding markers. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Turning On or Off reference marker mode. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
. . . . . . . . 140
6

Contents
Setting (changing) and retrieving stimulus value at marker positions . . . . . . . . . . . . . . . . . . . . . . . . . . 140
Retrieving measurement results at marker positions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
Searching for Positions That Match Specified Criteria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
Using marker search . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
Using the Analysis Commands. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
Sample Program . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
Bandwidth Search. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
Setting the bandwidth definition value . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
Retrieving bandwidth search results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
Sample Program . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
Statistical Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
Analysis Using the Fixture Simulator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
Matching Circuit Embedding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
Port Impedance Conversion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
Network De-embedding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
4-Port Network Embedding/De-embedding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
Balance-Unbalance Conversion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
Differential Matching Circuit Embedding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
Differential Port Impedance Conversion. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
Sample Program . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
Analysis in Time Domain (time domain function). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
Transforming measurement data to data in time domain . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
Deleting unnecessary measurement data in the time domain . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
Sample Program . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160
Analyzing impedance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
7. Reading/Writing Measurement Data
Data Transfer Format . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164
ASCII Transfer Format . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
Binary Transfer Format. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166
Internal data processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168
Data flow. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168
Internal data arrays . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168
Retrieving Measurement Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
Retrieving Internal Data Arrays . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
Entering Data into a Trace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
8. Limit Test
Performing a Limit Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 180
Configuring limit lines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 180
Showing/hiding limit lines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 180
Turning ON or OFF the Limit Test Feature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 180
Showing/hiding “Fail”. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 180
Obtaining Test Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181
Test results at each measurement point. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181
Test results for each trace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181
Test results for each channel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182
Overall test results. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184
7

Contents
Sample Program . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 186
9. Saving and Recalling (File Management)
Saving and Recalling File. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194
Specifying file. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194
Saving and recalling instrument status . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194
Saving measurement data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195
Saving measurement data in touchstone format . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .195
Saving the images on the LCD screen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 196
Saving and recalling the segment sweep table . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 197
Saving and recalling the limit table . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 197
Saving/recalling Power Sensor Calibration Factor Table. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 197
Saving/recalling Loss Compensation Table . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 198
Saving/loading (importing) the VBA program. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 198
Sample program . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 199
Managing Files. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
Creating directory (folder) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
Deleting file (directory) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
Copying file . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
Transferring files. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
Retrieving data from storage. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
Sample program . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203
10. Communication with External Instruments Using Handler I/O Port
Handler I/O Port Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 210
I/O Signal Pin Layout and Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211
Inputting/Outputting Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 215
Specifying signal direction of port . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 215
Reading data input to port. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 216
Data output to port . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 216
Preset states at power-on . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 217
Timing Chart. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 218
Electrical Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222
Input signal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222
Output signal. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223
Power supply (+5 V). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223
Sample Program . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 224
11. Working with Automatic Test Systems
Preventing Erroneous Key Operation on the Front Panel (key lock feature). . . . . . . . . . . . . . . . . . . . . . . 226
Improving Command Processing Speed . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 227
Measurement results (trace) do not need to be updated . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 227
Measurement results (trace) need to be updated. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 227
Sample program . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 228
Detecting Occurrence of an Error. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 230
Using the status reporting system. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 230
Using the error queue . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 230
Sample program . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 231
8

12. Controlling E5091A
Controlling E5091A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234
Selecting Test Set . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234
Turning control ON/OFF. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234
Selecting ports assigned to Port 1 to Port n. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234
Setting control line . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235
Sample program . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 236
13. Sample Application Programs
Basic Measurement (measuring a band pass filter) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 240
Measurement with Automatic Test Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 246
Measurement using E5091A (measuring FEM). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 256
Control Using SICL-LAN Server. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265
Using VBA macro. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265
Description of operation in VBA macro. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 266
Controlling Using Telnet Server. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273
Using VBA macro. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273
Description of operation in VBA macro. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 274
Contents
14. SCPI Command Reference
Notational conventions in this command reference . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 284
Syntax . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 284
Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 284
Parameters. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285
Query response . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285
Related commands . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285
Equivalent key. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285
IEEE Common Commands. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 286
*CLS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 286
*ESE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 287
*ESR? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 287
*IDN? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 288
*OPC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 288
*OPC? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 288
*OPT? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 289
*RST . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 289
*SRE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 290
*STB? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 291
*TRG. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 291
*WAI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 291
E5070B/E5071B commands. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292
:ABOR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292
:CALC{1-16}:BLIM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293
:CALC{1-16}:BLIM:DB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 294
:CALC{1-16}:BLIM:DISP:MARK . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 295
:CALC{1-16}:BLIM:DISP:VAL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 296
:CALC{1-16}:BLIM:FAIL? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 297
:CALC{1-16}:BLIM:MAX . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 298
9

Contents
:CALC{1-16}:BLIM:MIN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 299
:CALC{1-16}:BLIM:REP? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 300
:CALC{1-16}:CONV. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 301
:CALC{1-16}:CONV:FUNC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302
:CALC{1-16}:CORR:EDEL:MED . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303
:CALC{1-16}:CORR:EDEL:TIME . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 304
:CALC{1-16}:CORR:EDEL:WGC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 305
:CALC{1-16}:CORR:OFFS:PHAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 306
:CALC{1-16}:DATA:FDAT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 307
:CALC{1-16}:DATA:FMEM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 308
:CALC{1-16}:DATA:SDAT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 309
:CALC{1-16}:DATA:SMEM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 310
:CALC{1-16}:EQU:STAT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 311
:CALC{1-16}:EQU:TEXT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 312
:CALC{1-16}:EQU:VAL? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 313
:CALC{1-16}:FILT:TIME . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314
:CALC{1-16}:FILT:TIME:CENT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 315
:CALC{1-16}:FILT:TIME:SHAP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 316
:CALC{1-16}:FILT:TIME:SPAN. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 317
:CALC{1-16}:FILT:TIME:STAR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 318
:CALC{1-16}:FILT:TIME:STAT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 319
:CALC{1-16}:FILT:TIME:STOP. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 320
:CALC{1-16}:FORM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 321
:CALC{1-16}:FSIM:BAL:CZC:BPOR{1-2}:IMAG. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 323
:CALC{1-16}:FSIM:BAL:CZC:BPOR{1-2}:REAL. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 324
:CALC{1-16}:FSIM:BAL:CZC:BPOR{1-2}:Z0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325
:CALC{1-16}:FSIM:BAL:CZC:STAT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 326
:CALC{1-16}:FSIM:BAL:DEV. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 327
:CALC{1-16}:FSIM:BAL:DMC:BPOR{1-2}. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 328
:CALC{1-16}:FSIM:BAL:DMC:BPOR{1-2}:PAR:C. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 329
:CALC{1-16}:FSIM:BAL:DMC:BPOR{1-2}:PAR:G . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 330
:CALC{1-16}:FSIM:BAL:DMC:BPOR{1-2}:PAR:L. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 331
:CALC{1-16}:FSIM:BAL:DMC:BPOR{1-2}:PAR:R. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 332
:CALC{1-16}:FSIM:BAL:DMC:BPOR{1-2}:USER:FIL. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333
:CALC{1-16}:FSIM:BAL:DMC:STAT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 334
:CALC{1-16}:FSIM:BAL:DZC:BPOR{1-2}:IMAG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 335
:CALC{1-16}:FSIM:BAL:DZC:BPOR{1-2}:REAL. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 336
:CALC{1-16}:FSIM:BAL:DZC:BPOR{1-2}:Z0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 337
:CALC{1-16}:FSIM:BAL:DZC:STAT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 338
:CALC{1-16}:FSIM:BAL:PAR{1-16}:BBAL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 339
:CALC{1-16}:FSIM:BAL:PAR{1-16}:SBAL. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 340
:CALC{1-16}:FSIM:BAL:PAR{1-16}:SSB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 341
:CALC{1-16}:FSIM:BAL:PAR{1-16}:STAT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 342
:CALC{1-16}:FSIM:BAL:TOP:BBAL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
:CALC{1-16}:FSIM:BAL:TOP:PROP:STAT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 344
:CALC{1-16}:FSIM:BAL:TOP:SBAL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 345
:CALC{1-16}:FSIM:BAL:TOP:SSB. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 346
:CALC{1-16}:FSIM:EMB:NETW{1-2}:FIL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 347
:CALC{1-16}:FSIM:EMB:NETW{1-2}:TYPE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 348
343
10

Contents
:CALC{1-16}:FSIM:EMB:STAT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 349
:CALC{1-16}:FSIM:EMB:TOP:A:PORT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 350
:CALC{1-16}:FSIM:EMB:TOP:B:PORT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 351
:CALC{1-16}:FSIM:EMB:TOP:C:PORT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 352
:CALC{1-16}:FSIM:EMB:TYPE. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353
:CALC{1-16}:FSIM:SEND:DEEM:PORT{1-4}. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 354
:CALC{1-16}:FSIM:SEND:DEEM:PORT{1-4}:USER:FIL. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 355
:CALC{1-16}:FSIM:SEND:DEEM:STAT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 356
:CALC{1-16}:FSIM:SEND:PMC:PORT{1-4} . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 357
:CALC{1-16}:FSIM:SEND:PMC:PORT{1-4}:PAR:C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 358
:CALC{1-16}:FSIM:SEND:PMC:PORT{1-4}:PAR:G . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 359
:CALC{1-16}:FSIM:SEND:PMC:PORT{1-4}:PAR:L . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 360
:CALC{1-16}:FSIM:SEND:PMC:PORT{1-4}:PAR:R . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 361
:CALC{1-16}:FSIM:SEND:PMC:PORT{1-4}:USER:FIL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 362
:CALC{1-16}:FSIM:SEND:PMC:STAT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 363
:CALC{1-16}:FSIM:SEND:ZCON:PORT{1-4}:IMAG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 364
:CALC{1-16}:FSIM:SEND:ZCON:PORT{1-4}:REAL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 365
:CALC{1-16}:FSIM:SEND:ZCON:PORT{1-4}:Z0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 366
:CALC{1-16}:FSIM:SEND:ZCON:STAT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 367
:CALC{1-16}:FSIM:STAT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 368
:CALC{1-16}:FUNC:DATA?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 369
:CALC{1-16}:FUNC:DOM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 370
:CALC{1-16}:FUNC:DOM:COUP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 371
:CALC{1-16}:FUNC:DOM:STAR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 372
:CALC{1-16}:FUNC:DOM:STOP. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 373
:CALC{1-16}:FUNC:EXEC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 373
:CALC{1-16}:FUNC:PEXC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374
:CALC{1-16}:FUNC:POIN? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 375
:CALC{1-16}:FUNC:PPOL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 376
:CALC{1-16}:FUNC:TARG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 377
:CALC{1-16}:FUNC:TTR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 378
:CALC{1-16}:FUNC:TYPE. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 379
:CALC{1-16}:LIM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 380
:CALC{1-16}:LIM:DATA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 381
:CALC{1-16}:LIM:DISP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 382
:CALC{1-16}:LIM:FAIL? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383
:CALC{1-16}:LIM:OFFS:AMPL. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 384
:CALC{1-16}:LIM:OFFS:MARK . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 385
:CALC{1-16}:LIM:OFFS:STIM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 386
:CALC{1-16}:LIM:REP? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 387
:CALC{1-16}:LIM:REP:ALL? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 388
:CALC{1-16}:LIM:REP:POIN?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 389
:CALC{1-16}:MARK:BWID. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 390
:CALC{1-16}:MARK:COUP. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 391
:CALC{1-16}:MARK:FUNC:DOM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 392
:CALC{1-16}:MARK:FUNC:DOM:COUP. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 393
:CALC{1-16}:MARK:FUNC:DOM:STAR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394
:CALC{1-16}:MARK:FUNC:DOM:STOP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 395
:CALC{1-16}:MARK:NOTC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 396
11

Contents
:CALC{1-16}:MARK:REF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 397
:CALC{1-16}:MARK{1-10} . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 398
:CALC{1-16}:MARK{1-10}:ACT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 399
:CALC{1-16}:MARK{1-10}:BWID:DATA? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 400
:CALC{1-16}:MARK{1-10}:BWID:THR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 401
:CALC{1-16}:MARK{1-10}:DISC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 402
:CALC{1-16}:MARK{1-10}:FUNC:EXEC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 403
:CALC{1-16}:MARK{1-10}:FUNC:PEXC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 404
:CALC{1-16}:MARK{1-10}:FUNC:PPOL. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 405
:CALC{1-16}:MARK{1-10}:FUNC:TARG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 406
:CALC{1-16}:MARK{1-10}:FUNC:TRAC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 407
:CALC{1-16}:MARK{1-10}:FUNC:TTR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 408
:CALC{1-16}:MARK{1-10}:FUNC:TYPE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 409
:CALC{1-16}:MARK{1-10}:NOTC:DATA? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 410
:CALC{1-16}:MARK{1-10}:NOTC:THR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 411
:CALC{1-16}:MARK{1-10}:SET. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 412
:CALC{1-16}:MARK{1-10}:X . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 413
:CALC{1-16}:MARK{1-10}:Y? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 414
:CALC{1-16}:MATH:FUNC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 415
:CALC{1-16}:MATH:MEM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 416
:CALC{1-16}:MIX:XAX. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 417
:CALC{1-16}:MST . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 418
:CALC{1-16}:MST:DATA?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 419
:CALC{1-16}:OFFS:XAX. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 420
:CALC{1-16}:PAR:COUN. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 421
:CALC{1-16}:PAR{1-16}:DEF. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 422
:CALC{1-16}:PAR{1-16}:SEL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 424
:CALC{1-16}:PAR{1-16}:SPOR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 425
:CALC{1-16}:RLIM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 426
:CALC{1-16}:RLIM:DATA. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 427
:CALC{1-16}:RLIM:DISP:LINE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 428
:CALC{1-16}:RLIM:DISP:SEL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 429
:CALC{1-16}:RLIM:DISP:VAL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 430
:CALC{1-16}:RLIM:FAIL?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 431
:CALC{1-16}:RLIM:REP? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 432
:CALC{1-16}:SMO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 433
:CALC{1-16}:SMO:APER . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 434
:CALC{1-16}:TRAN:TIME. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 435
:CALC{1-16}:TRAN:TIME:CENT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 436
:CALC{1-16}:TRAN:TIME:IMP:WIDT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 437
:CALC{1-16}:TRAN:TIME:KBES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 438
:CALC{1-16}:TRAN:TIME:LPFR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 439
:CALC{1-16}:TRAN:TIME:SPAN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 439
:CALC{1-16}:TRAN:TIME:STAR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 440
:CALC{1-16}:TRAN:TIME:STAT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 441
:CALC{1-16}:TRAN:TIME:STEP:RTIM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 442
:CALC{1-16}:TRAN:TIME:STIM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 443
:CALC{1-16}:TRAN:TIME:STOP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 444
:CONT:HAND:A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 445
12

Contents
:CONT:HAND:B. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 445
:CONT:HAND:C. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 446
:CONT:HAND:C:MODE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 447
:CONT:HAND:D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 448
:CONT:HAND:D:MODE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 449
:CONT:HAND:E. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 450
:CONT:HAND:F. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 451
:CONT:HAND:IND:STAT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 452
:CONT:HAND:OUTP{1-2} . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 452
:CONT:HAND:RTR:STAT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 453
:DISP:ANN:FREQ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 454
:DISP:CCL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 454
:DISP:CLOC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 455
:DISP:COL{1-2}:BACK. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 456
:DISP:COL{1-2}:GRAT{1-2} . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 457
:DISP:COL{1-2}:LIM{1-2}. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 458
:DISP:COL{1-2}:RES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 458
:DISP:COL{1-2}:TRAC{1-16}:DATA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 459
:DISP:COL{1-2}:TRAC{1-16}:MEM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 460
:DISP:ECHO. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 461
:DISP:ECHO:CLE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 461
:DISP:ENAB. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 462
:DISP:FSIG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 463
:DISP:IMAG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 464
:DISP:MAX. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 465
:DISP:SKEY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 465
:DISP:SPL. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 466
:DISP:TABL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 468
:DISP:TABL:TYPE. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 469
:DISP:UPD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 470
:DISP:WIND{1-16}:ACT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 470
:DISP:WIND{1-16}:ANN:MARK:ALIG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 471
:DISP:WIND{1-16}:ANN:MARK:SING. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 472
:DISP:WIND{1-16}:LAB. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 473
:DISP:WIND{1-16}:MAX . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 474
:DISP:WIND{1-16}:SPL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 475
:DISP:WIND{1-16}:TITL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 476
:DISP:WIND{1-16}:TITL:DATA. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 477
:DISP:WIND{1-16}:TRAC{1-16}:ANN:MARK:POS:X . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 478
:DISP:WIND{1-16}:TRAC{1-16}:ANN:MARK:POS:Y . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 479
:DISP:WIND{1-16}:TRAC{1-16}:MEM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 480
:DISP:WIND{1-16}:TRAC{1-16}:STAT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 481
:DISP:WIND{1-16}:TRAC{1-16}:Y:AUTO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 481
:DISP:WIND{1-16}:TRAC{1-16}:Y:PDIV. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 482
:DISP:WIND{1-16}:TRAC{1-16}:Y:RLEV . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 483
:DISP:WIND{1-16}:TRAC{1-16}:Y:RPOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 484
:DISP:WIND{1-16}:X:SPAC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 485
:DISP:WIND{1-16}:Y:DIV . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 486
:FORM:BORD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 487
13

Contents
:FORM:DATA. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 488
:HCOP. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 489
:HCOP:ABOR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 489
:HCOP:IMAG. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 490
:INIT{1-16} . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 490
:INIT{1-16}:CONT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 491
:MMEM:CAT? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 492
:MMEM:COPY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 493
:MMEM:DEL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 494
:MMEM:LOAD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 495
:MMEM:LOAD:ASCF. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 496
:MMEM:LOAD:BSCF. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 497
:MMEM:LOAD:CHAN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 498
:MMEM:LOAD:CKIT{1-20} . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 499
:MMEM:LOAD:LIM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 500
:MMEM:LOAD:PLOS{1-4} . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 501
:MMEM:LOAD:PROG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 502
:MMEM:LOAD:RLIM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 503
:MMEM:LOAD:SEGM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 504
:MMEM:MDIR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 505
:MMEM:STOR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 506
:MMEM:STOR:ASCF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 507
:MMEM:STOR:BSCF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 508
:MMEM:STOR:CHAN. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 509
:MMEM:STOR:CHAN:CLE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 509
:MMEM:STOR:CKIT{1-20} . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 510
:MMEM:STOR:FDAT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 511
:MMEM:STOR:IMAG. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 512
:MMEM:STOR:LIM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 513
:MMEM:STOR:PLOS{1-4}. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 514
:MMEM:STOR:PROG. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 515
:MMEM:STOR:RLIM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 516
:MMEM:STOR:SALL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 517
:MMEM:STOR:SEGM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 518
:MMEM:STOR:SNP. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 519
:MMEM:STOR:SNP:FORM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 520
:MMEM:STOR:SNP:TYPE:S1P . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 521
:MMEM:STOR:SNP:TYPE:S2P . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 522
:MMEM:STOR:SNP:TYPE:S3P . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 523
:MMEM:STOR:SNP:TYPE:S4P . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 524
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 525
:MMEM:TRAN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 526
:OUTP. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 527
:PROG:CAT? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 527
:PROG:NAME . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 528
:PROG:STAT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 529
:PROG:VAR:ARR{1-10} . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 530
:PROG:VAR:ARR{1-10}:SIZE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 531
:PROG:VAR:DOUB{1-10} . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 532
14

Contents
:PROG:VAR:LONG{1-10} . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 533
:PROG:VAR:STR{1-10} . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 534
:SENS:CORR:COLL:ECAL:ORI. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 535
:SENS:CORR:COLL:ECAL:PATH . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 536
:SENS:CORR:IMP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 537
:SENS:MULT:CAT? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 538
:SENS:MULT{1-2}:COUN?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 539
:SENS:MULT{1-2}:DISP. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 539
:SENS:MULT{1-2}:INC?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 540
:SENS:MULT{1-2}:NAME . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 541
:SENS:MULT{1-2}:STAT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 542
:SENS{1-16}:AVER:CLE. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 543
:SENS{1-16}:AVER . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 543
:SENS{1-16}:AVER:COUN. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 544
:SENS{1-16}:BAND . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 545
:SENS{1-16}:BWID. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 546
:SENS{1-16}:CORR:CLE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 547
:SENS{1-16}:CORR:COEF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 548
:SENS{1-16}:CORR:COEF:METH:ERES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 550
:SENS{1-16}:CORR:COEF:METH:OPEN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 551
:SENS{1-16}:CORR:COEF:METH:SHOR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 552
:SENS{1-16}:CORR:COEF:METH:SOLT1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 553
:SENS{1-16}:CORR:COEF:METH:SOLT2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 554
:SENS{1-16}:CORR:COEF:METH:SOLT3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 555
:SENS{1-16}:CORR:COEF:METH:SOLT4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 556
:SENS{1-16}:CORR:COEF:METH:THRU. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 557
:SENS{1-16}:CORR:COEF:SAVE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 558
:SENS{1-16}:CORR:COLL:ADAP{1-4}:LENG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 559
:SENS{1-16}:CORR:COLL:CKIT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 560
:SENS{1-16}:CORR:COLL:CKIT:LAB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 561
:SENS{1-16}:CORR:COLL:CKIT:ORD. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 562
:SENS{1-16}:CORR:COLL:CKIT:ORD:LOAD. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 563
:SENS{1-16}:CORR:COLL:CKIT:ORD:OPEN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 564
:SENS{1-16}:CORR:COLL:CKIT:ORD:SHOR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 565
:SENS{1-16}:CORR:COLL:CKIT:ORD:THRU . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 566
:SENS{1-16}:CORR:COLL:CKIT:ORD:TRLL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 567
:SENS{1-16}:CORR:COLL:CKIT:ORD:TRLR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 568
:SENS{1-16}:CORR:COLL:CKIT:ORD:TRLT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 569
:SENS{1-16}:CORR:COLL:CKIT:RES. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 570
:SENS{1-16}:CORR:COLL:CKIT:STAN{1-21}:ARB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 571
:SENS{1-16}:CORR:COLL:CKIT:STAN{1-21}:C0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 572
:SENS{1-16}:CORR:COLL:CKIT:STAN{1-21}:C1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 573
:SENS{1-16}:CORR:COLL:CKIT:STAN{1-21}:C2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 574
:SENS{1-16}:CORR:COLL:CKIT:STAN{1-21}:C3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 575
:SENS{1-16}:CORR:COLL:CKIT:STAN{1-21}:CHAR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 576
:SENS{1-16}:CORR:COLL:CKIT:STAN{1-21}:DEL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 577
:SENS{1-16}:CORR:COLL:CKIT:STAN{1-21}:FMAX . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 578
:SENS{1-16}:CORR:COLL:CKIT:STAN{1-21}:FMIN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 579
:SENS{1-16}:CORR:COLL:CKIT:STAN{1-21}:L0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 580
15

Contents
:SENS{1-16}:CORR:COLL:CKIT:STAN{1-21}:L1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 581
:SENS{1-16}:CORR:COLL:CKIT:STAN{1-21}:L2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 582
:SENS{1-16}:CORR:COLL:CKIT:STAN{1-21}:L3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 583
:SENS{1-16}:CORR:COLL:CKIT:STAN{1-21}:LAB. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 584
:SENS{1-16}:CORR:COLL:CKIT:STAN{1-21}:LOSS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 585
:SENS{1-16}:CORR:COLL:CKIT:STAN{1-21}:TYPE. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 586
:SENS{1-16}:CORR:COLL:CKIT:STAN{1-21}:Z0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 587
:SENS{1-16}:CORR:COLL:CKIT:TRL:IMP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 588
:SENS{1-16}:CORR:COLL:CKIT:TRL:RPL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 589
:SENS{1-16}:CORR:COLL:CLE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 590
:SENS{1-16}:CORR:COLL:ECAL:CCH . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 591
:SENS{1-16}:CORR:COLL:ECAL:ERES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 592
:SENS{1-16}:CORR:COLL:ECAL:ISOL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 593
:SENS{1-16}:CORR:COLL:ECAL:SOLT1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 594
:SENS{1-16}:CORR:COLL:ECAL:SOLT2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 594
:SENS{1-16}:CORR:COLL:ECAL:SOLT3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 595
:SENS{1-16}:CORR:COLL:ECAL:SOLT4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 595
:SENS{1-16}:CORR:COLL:ECAL:THRU . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 596
:SENS{1-16}:CORR:COLL:ECAL:UCH . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 597
:SENS{1-16}:CORR:COLL:ECAL:UTHR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 598
:SENS{1-16}:CORR:COLL:ISOL. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 599
:SENS{1-16}:CORR:COLL:LOAD. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 600
:SENS{1-16}:CORR:COLL:METH:ADAP:REM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 601
:SENS{1-16}:CORR:COLL:METH:ERES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 602
:SENS{1-16}:CORR:COLL:METH:OPEN. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 603
:SENS{1-16}:CORR:COLL:METH:SHOR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 603
:SENS{1-16}:CORR:COLL:METH:SOLT1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 604
:SENS{1-16}:CORR:COLL:METH:SOLT2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 604
:SENS{1-16}:CORR:COLL:METH:SOLT3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 605
:SENS{1-16}:CORR:COLL:METH:SOLT4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 605
:SENS{1-16}:CORR:COLL:METH:THRU . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 606
:SENS{1-16}:CORR:COLL:METH:TRL2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 607
:SENS{1-16}:CORR:COLL:METH:TRL3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 608
:SENS{1-16}:CORR:COLL:METH:TRL4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 609
:SENS{1-16}:CORR:COLL:METH:TYPE? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 610
:SENS{1-16}:CORR:COLL:OPEN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 611
:SENS{1-16}:CORR:COLL:PART:SAVE. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 612
:SENS{1-16}:CORR:COLL:SAVE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 613
:SENS{1-16}:CORR:COLL:SHOR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 613
:SENS{1-16}:CORR:COLL:SIMP:SAVE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 614
:SENS{1-16}:CORR:COLL:SUBC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 615
:SENS{1-16}:CORR:COLL:THRU. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 616
:SENS{1-16}:CORR:COLL:TRLL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 617
:SENS{1-16}:CORR:COLL:TRLR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 618
:SENS{1-16}:CORR:COLL:TRLT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 619
:SENS{1-16}:CORR:EXT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 620
:SENS{1-16}:CORR:EXT:AUTO:CONF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 621
:SENS{1-16}:CORR:EXT:AUTO:DCOF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
:SENS{1-16}:CORR:EXT:AUTO:LOSS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 623
2
16

Contents
:SENS{1-16}:CORR:EXT:AUTO:MEAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 624
:SENS{1-16}:CORR:EXT:AUTO:PORT{1-4} . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 625
:SENS{1-16}:CORR:EXT:AUTO:RESet. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 626
:SENS{1-16}:CORR:EXT:AUTO:STAR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 627
:SENS{1-16}:CORR:EXT:AUTO:STOP. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 628
:SENS{1-16}:CORR:EXT:PORT{1-4} . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 629
:SENS{1-16}:CORR:EXT:PORT{1-4}:FREQ{1-2} . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 630
:SENS{1-16}:CORR:EXT:PORT{1-4}:INCL{1-2} . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 631
:SENS{1-16}:CORR:EXT:PORT{1-4}:LDC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 632
:SENS{1-16}:CORR:EXT:PORT{1-4}:LOSS{1-2} . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 633
:SENS{1-16}:CORR:OFFS:CLE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 634
:SENS{1-16}:CORR:OFFS:COLL:CLE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 635
:SENS{1-16}:CORR:OFFS:COLL:ECAL:SMIX2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 636
:SENS{1-16}:CORR:OFFS:COLL:ECAL:SOLT1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 637
:SENS{1-16}:CORR:OFFS:COLL:LOAD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 638
:SENS{1-16}:CORR:OFFS:COLL:METH:SMIX2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 639
:SENS{1-16}:CORR:OFFS:COLL:METH:SOLT1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 640
:SENS{1-16}:CORR:OFFS:COLL:OPEN. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 641
:SENS{1-16}:CORR:OFFS:COLL:PMET. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 642
:SENS{1-16}:CORR:OFFS:COLL:SAVE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 643
:SENS{1-16}:CORR:OFFS:COLL:SHOR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 644
:SENS{1-16}:CORR:OFFS:COLL:THRU. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 645
:SENS{1-16}:CORR:PROP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 646
:SENS{1-16}:CORR:REC{1-4}. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 647
:SENS{1-16}:CORR:REC{1-4}:COLL:ACQ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 648
:SENS{1-16}:CORR:RVEL:COAX. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 649
:SENS{1-16}:CORR:STAT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 650
:SENS{1-16}:CORR:TRIG:FREE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 651
:SENS{1-16}:CORR:TYPE{1-16}?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 652
:SENS{1-16}:FREQ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 653
:SENS{1-16}:FREQ:CENT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 654
:SENS{1-16}:FREQ:DATA? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 655
:SENS{1-16}:FREQ:SPA N. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 656
:SENS{1-16}:FREQ:STAR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 657
:SENS{1-16}:FREQ:STOP. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 658
:SENS{1-16}:MULT{1-2}:OUTP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 659
:SENS{1-16}:MULT {1-2}:PORT{1-20} . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 660
:SENS{1-16}:MULT{1-2}:PORT{1-20}:CAT?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 662
:SENS{1-16}:MULT{1-2}:TSET9:OUTP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 663
:SENS{1-16}:MULT{1-2}:TSET9:PORT1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 664
:SENS{1-16}:MULT{1-2}:TSET9:PORT2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 665
:SENS{1-16}:MULT{1-2}:TSET9:PORT3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
:SENS{1-16}:MULT{1-2}:TSET9:PORT4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 667
:SENS{1-16}:OFFS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 668
:SENS{1-16}:OFFS:ASP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 669
:SENS{1-16}:OFFS:LOC:CONT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 670
:SENS{1-16}:OFFS:LOC:DATA? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 671
:SENS{1-16}:OFFS:LOC:DIV. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 672
:SENS{1-16}:OFFS:LOC:MULT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 673
66
17

Contents
:SENS{1-16}:OFFS:LOC:OFFS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 674
:SENS{1-16}:OFFS:LOC:STAR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 675
:SENS{1-16}:OFFS:LOC:STOP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 676
:SENS{1-16}:OFFS:LOC:POW. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 677
:SENS{1-16}:OFFS:LOC:POW:SLOP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 678
:SENS{1-16}:OFFS:LOC:POW:SLOP:STAT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 679
:SENS{1-16}:OFFS:LOC:STAT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 680
:SENS{1-16}:OFFS:PORT{1-4}:DATA? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 681
:SENS{1-16}:OFFS:PORT{1-4}:DIV . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 682
:SENS{1-16}:OFFS:PORT{1-4}:MULT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 683
:SENS{1-16}:OFFS:PORT{1-4}:OFFS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 684
:SENS{1-16}:OFFS:PORT{1-4}:STAR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 685
:SENS{1-16}:OFFS:PORT{1-4}:STOP. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 686
:SENS{1-16}:ROSC:SOUR? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 687
:SENS{1-16}:SEGM:DATA. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 688
:SENS{1-16}:SEGM:SWE:POIN? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 690
:SENS{1-16}:SEGM:SWE:TIME? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 690
:SENS{1-16}:SWE:ASP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 691
:SENS{1-16}:SWE:DEL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 691
:SENS{1-16}:SWE:GEN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 692
:SENS{1-16}:SWE:POIN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 693
:SENS{1-16}:SWE:TIME . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 694
:SENS{1-16}:SWE:TIME:AUTO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 695
:SENS{1-16}:SWE:TYPE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 696
:SERV:CHAN:ACT? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 696
:SERV:CHAN:COUN?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 697
:SERV:CHAN{1-16}:TRAC:ACT?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 697
:SERV:CHAN:TRAC:COUN?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 697
:SERV:PORT:COUN?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 698
:SERV:SREV?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 698
:SERV:SWE:FREQ:MAX?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 699
:SERV:SWE:FREQ:MIN? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 699
:SERV:SWE:POIN? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 699
:SOUR:POW:PORT:CORR:COLL:ASEN:RCF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 700
:SOUR:POW:PORT:CORR:COLL:BSEN:RCF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 701
:SOUR:POW:PORT:CORR:COLL:TABL:ASEN:DATA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 702
:SOUR:POW:PORT:CORR:COLL:TABL:BSEN:DATA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 703
:SOUR{1-16}:POW . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 704
:SOUR{1-16}:POW:ATT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 705
:SOUR{1-16}:POW:ATT:AUTO. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 706
:SOUR{1-16}:POW:CENT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 708
:SOUR{1-16}:POW:PORT:COUP. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 709
:SOUR{1-16}:POW:PORT{1-4} . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
:SOUR{1-16}:POW:PORT{1-4}:CORR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 711
:SOUR{1-16}:POW:PORT{1-4}:CORR:COLL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 711
:SOUR{1-16}:POW:PORT{1-4}:CORR:COLL:AVER . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 712
:SOUR{1-16}:POW:PORT{1-4}:CORR:COLL:NTOL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 713
:SOUR{1-16}:POW:PORT{1-4}:CORR:COLL:TABL:LOSS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 714
:SOUR{1-16}:POW:PORT{1-4}:CORR:COLL:TABL:LOSS:DATA . . . . . . . . . . . . . . . . . . . . . . . . . 715
. . . 710
18

Contents
:SOUR{1-16}:POW:PORT{1-4}:CORR:DATA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 716
:SOUR{1-16}:POW:SLOP. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 717
:SOUR{1-16}:POW:SLOP:STAT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 718
:SOUR{1-16}:POW:SPAN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 719
:SOUR{1-16}:POW:STAR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 720
:SOUR{1-16}:POW:STOP. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 721
:STAT:OPER? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 722
:STAT:OPER:COND?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 722
:STAT:OPER:ENAB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 723
:STAT:OPER:NTR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 724
:STAT:OPER:PTR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 725
:STAT:PRES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 726
:STAT:QUES? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 726
:STAT:QUES:BLIM? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 727
:STAT:QUES:BLIM:CHAN{1-16}?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 727
:STAT:QUES:BLIM:CHAN{1-16}:COND? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 727
:STAT:QUES:BLIM:CHAN{1-16}:ECH? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 729
:STAT:QUES:BLIM:CHAN{1-16}:ECH:COND?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 729
:STAT:QUES:BLIM:CHAN{1-16}:ECH:ENAB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 730
:STAT:QUES:BLIM:CHAN{1-16}:ECH:NTR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 731
:STAT:QUES:BLIM:CHAN{1-16}:ECH:PTR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 732
:STAT:QUES:BLIM:CHAN{1-16}:ENAB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 733
:STAT:QUES:BLIM:CHAN{1-16}:NTR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 734
:STAT:QUES:BLIM:CHAN{1-16}:PTR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 735
:STAT:QUES:BLIM:COND? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 735
:STAT:QUES:BLIM:ELIM? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 736
:STAT:QUES:BLIM:ELIM:COND?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 736
:STAT:QUES:BLIM:ELIM:ENAB. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 737
:STAT:QUES:BLIM:ELIM:NTR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 738
:STAT:QUES:BLIM:ELIM:PTR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 739
:STAT:QUES:BLIM:ENAB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 740
:STAT:QUES:BLIM:NTR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 741
:STAT:QUES:BLIM:PTR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 742
:STAT:QUES:COND?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 743
:STAT:QUES:ENAB. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 744
:STAT:QUES:LIM?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 745
:STAT:QUES:LIM:CHAN{1-16}? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 745
:STAT:QUES:LIM:CHAN{1-16}:COND?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 745
:STAT:QUES:LIM:CHAN{1-16}:ECH? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 747
:STAT:QUES:LIM:CHAN{1-16}:ECH:COND? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 747
:STAT:QUES:LIM:CHAN{1-16}:ECH:ENAB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 748
:STAT:QUES:LIM:CHAN{1-16}:ECH:NTR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 749
:STAT:QUES:LIM:CHAN{1-16}:ECH:PTR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 750
:STAT:QUES:LIM:CHAN{1-16}:ENAB. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 751
:STAT:QUES:LIM:CHAN{1-16}:NTR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 752
:STAT:QUES:LIM:CHAN{1-16}:PTR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 753
:STAT:QUES:LIM:COND?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 754
:STAT:QUES:LIM:ELIM? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 754
:STAT:QUES:LIM:ELIM:COND? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 755
19

Contents
:STAT:QUES:LIM:ELIM:ENAB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 755
:STAT:QUES:LIM:ELIM:NTR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 756
:STAT:QUES:LIM:ELIM:PTR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 757
:STAT:QUES:LIM:ENAB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 758
:STAT:QUES:LIM:NTR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 759
:STAT:QUES:LIM:PTR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 760
:STAT:QUES:NTR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 761
:STAT:QUES:PTR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 762
:STAT:QUES:RLIM? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 763
:STAT:QUES:RLIM:CHAN{1-16}? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 763
:STAT:QUES:RLIM:CHAN{1-16}:COND? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 763
:STAT:QUES:RLIM:CHAN{1-16}:ECH?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 765
:STAT:QUES:RLIM:CHAN{1-16}:ECH:COND?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 765
:STAT:QUES:RLIM:CHAN{1-16}:ECH:ENAB. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 766
:STAT:QUES:RLIM:CHAN{1-16}:ECH:NTR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 767
:STAT:QUES:RLIM:CHAN{1-16}:ECH:PTR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 768
:STAT:QUES:RLIM:CHAN{1-16}:ENAB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 769
:STAT:QUES:RLIM:CHAN{1-16}:NTR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 770
:STAT:QUES:RLIM:CHAN{1-16}:PTR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 771
:STAT:QUES:RLIM:COND? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 771
:STAT:QUES:RLIM:ELIM?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 772
:STAT:QUES:RLIM:ELIM:COND?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 772
:STAT:QUES:RLIM:ELIM:ENAB. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 773
:STAT:QUES:RLIM:ELIM:NTR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 774
:STAT:QUES:RLIM:ELIM:PTR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 775
:STAT:QUES:RLIM:ENAB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 776
:STAT:QUES:RLIM:NTR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 777
:STAT:QUES:RLIM:PTR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 778
:SYST:BACK . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 779
:SYST:BEEP:COMP:IMM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 780
:SYST:BEEP:COMP:STAT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 780
:SYST:BEEP:WARN:IMM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 781
:SYST:BEEP:WARN:STAT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 781
:SYST:COMM:GPIB:PMET:ADDR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 782
:SYST:COMM:GPIB:SGEN:ADDR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 783
:SYST:COMM:GPIB:SGEN:CCOM:FREQ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 784
:SYST:COMM:GPIB:SGEN:CCOM:POW. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 785
:SYST:COMM:GPIB:SGEN:CCOM:PRES. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 786
:SYST:COMM:GPIB:SGEN:CCOM:RFON . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 787
:SYST:COMM:GPIB:SGEN:DWEL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 788
:SYST:COMM:GPIB:SGEN:TYPE. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 789
:SYST:CORR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 790
:SYST:DATE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 790
:SYST:ERR?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 791
:SYST:ISPC:PORT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 792
:SYST:ISPC:STAT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 793
:SYST:KLOC:KBD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 794
:SYST:KLOC:MOUS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 795
:SYST:POFF. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 796
20

Contents
:SYST:PRES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 796
:SYST:SEC:LEV. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 797
:SYST:SERV? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 798
:SYST:TEMP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 799
:SYST:TEMP:HIGH. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 799
:SYST:TIME. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 800
:SYST:UPR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 801
:TRIG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 802
:TRIG:AVER. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 803
:TRIG:EXT:DEL. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 804
:TRIG:EXT:LLAT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 805
:TRIG:POIN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 806
:TRIG:SCOP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 807
:TRIG:SING . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 808
:TRIG:SOUR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 809
Command list . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 810
List by front panel key . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 810
Command tree . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 828
A. Manual Changes
Manual Changes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 852
Change 10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 853
Change 9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 853
Change 8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 854
Change 7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 854
Change 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 857
Change 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 857
Change 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 859
Change 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 861
Change 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 862
Change 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 862
B. Status Reporting System
General Status Register Model. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 864
Event Register. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 865
Enable Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 865
Status Byte Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 865
Condition Register and Transition Filter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 866
Status Register Structure. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 867
Using the Status Reporting System. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 894
C. Comparing Commands on the 8753ES and E5070B/E5071B
8753ES vs. E5070B/E5071B Command Correspondence (by function) . . . . . . . . . . . . . . . . . . . . . . . . . . 898
8753ES vs. E5070B/E5071B Command Comparison (8753ES-only commands excluded) . . . . . . . . . . . 929
21

Contents
22

1. Making Effective Use of
This Manual
1 Making Effective Use of This Manual
This chapter describes the contents of this guide.Using this chapter with the table of
contents helps you to retrieve description of a subject you wish to understand as well as to
obtain an overview of this guide.Also see the latter part of this chapter for brief description
of usage of this guide, focusing on searching commands.
23

Making Effective Use of This Manual
Contents of This Manual
Contents of This Manual
This is a programming guide with Agilent E5070B/E5071B.
This guide describes programming method mainly aiming at learning how to write a
program that remotely controls the E5070B/E5071B using SCPI commands, focusing on
sample usage with the HTBasic.
Controlling the E5070B/E5071B using the built-in VBA is not covered by this guide; it is
described in VBA Programmer's Guide. For using the E5070B/E5071B VBA, see VBA
Programmer's Guide.
Description in this guide assumes that the reader has learned manual operation of the
E5070B/E5071B.Thus, this guide does not describe each feature of the E5070B/E5071B in
detail. For detailed information on each feature, see User's Guide.
The chapter-by-chapter contents of this manual are as follows.
Chapter 1, “Making Effective Use of This Manual.”
This chapter describes the contents of this guide.Using this chapter with the table of
contents helps you to retrieve description of a subject you wish to understand as well
as to obtain an overview of this guide.Also see the latter part of this chapter for brief
description of usage of this guide, focusing on searching commands.
Chapter 2, “Overview of Remote Control.”
This chapter provides an overview of the remote control system and the SCPI
commands.
Chapter 3, “Setting Up the Analyzer.”
This chapter describes how to configure measurement conditions and how to
configure the way the instrument displays measurement results on the LCD.
Chapter 4, “Performing Calibration.”
This chapter explains how to obtain calibration coefficients and perform error
correction as well as how to define the calibration kit required to obtain the
calibration coefficients. It also shows how to perform power calibration.
Chapter 5, “Making a Measurement.”
This chapter explains how to trigger the instrument to start a new measurement cycle
and how to detect the end of a measurement cycle.
Chapter 6, “Analyzing Data.”
This chapter describes how to use markers, analysis commands, and fixture simulator
features.
Chapter 7, “Reading/Writing Measurement Data.”
This chapter provides an overview of the Agilent E5070B/E5071B's internal data
processing flow and describes how to read and write measurement results (internal
data array).
24 Chapter 1

Making Effective Use of This Manual
Contents of This Manual
Chapter 8, “Limit Test.”
This chapter explains how to use the Limit Test feature to perform a limit test and
determine the pass/fail status of the measured data.
Chapter 9, “Saving and Recalling (File Management).”
This chapter describes how to save and recall instrument status and measurement
results onto/from the files. Here also covered is managing files.
Chapter 10, “Communication with External Instruments Using Handler I/O Port.”
This chapter provides necessary information for communicating with external
instruments (for example, a handler in a production line) using the handler I/O port
equipped with the Agilent E5070B/E5071B.
Chapter 11, “Working with Autom a tic Test Systems.”
This chapter describes useful features when the Agilent E5070B/E5071B is
integrated with an automatic test system.
Chapter 12, “Controlling E5091A.”
1. Making Effective Use of
This Manual
This chapter explains how to control the E5091A.
Chapter 13, “Sample Application Programs.”
This chapter introduces several sample programs for basic measurement,
measurement with a system using the handler I/O, and controlling the instrument
over a LAN.
Chapter 14, “SCPI Command Reference.”
This chapter provides the SCPI command reference for the Agilent E5070B/E5071B.
It describes the commands using their abbreviated format in alphabetical order. If
you want to look up commands using their fully specified format, refer to the index
for the desired SCPI command. If you want to look up commands by their function,
refer to the SCPI command list ordered by function.
Appendix A, “Manual Changes.”
This appendix contains the information required to adapt this manual to earlier
versions or configurations of the Agilent E5070B/E5071B than that indicated by the
current printing date of this manual. The information in this manual applies directly
to the E5070B/E5071B model that has the serial number prefix listed on the title
page of this manual.
Appendix B, “Status Reporting System.”
This appendix describes the status reporting system of the Agilent E5070B/E5071B.
Appendix C, “Comparing Commands on the 8753ES and E5070B/E5071B.”
The following table presents a comparison of commands on the Agilent 8753ES and
Agilent E5070B/E5071B, listed alphabetically by function.
Chapter 1 25

Making Effective Use of This Manual
How To Use This Manual
How To Use This Manual
Chapters 3 to 9 provide task-based descriptions of SCPI commands that are useful for
programming and explain how you can use them. These chapters contain explanations and
sample program listings that you can use to develop your custom programs. For more
information on individual commands, see Chapter 14, “SCPI Command Reference.”
Looking up SCPI commands
Chapter 14 “SCPI Command Reference” contains a complete reference of SCPI
commands. You can look up a particular SCPI command in any of the following ways:
Lookup by Abbreviated Command Name
The command reference is organized alphabetically according to the
abbreviated name used as the title for each command’s description.
Lookup by Full Command Name
You can use the index at the end of the manual to find full command
names along with the page numbers where they appear.
Lookup by Command Function
T able 14-1 on page 811 provides a complete list of commands by
function and indicates the page numbers where the commands appear
in the command reference.
Lookup by Front panel key
T able 14-1 on page 811 provides a complete list of commands that
correspond to the front panel key tree and indicates the page numbers
where the commands appear in the command reference.
NOTE Some SCPI commands supported by the E5070B/E5071B have optional syntax elements.
In the command reference conventions, these elements are enclosed between square
brackets ([]) or printed in lowercase letters. See “Syntax” on page 284 for more
information.
26 Chapter 1

Making Effective Use of This Manual
How To Use This Manual
Using sample programs
This manual comes with a sample program disk, which contains the source files of the
sample programs used in the manual. The disk is DOS-formatted and the files are saved in
ASCII format.
Loading a sample program
To load a sample program into the HTBasic interpreter, use the GET command. For
example, you can load setup.bas, one of the sample programs, by the following procedure:
In the HTBasic screen, type the following command and press the Return key.
GET "setup.bas"
Looking up a sample program
To look up the description of a sample program, see the listings under “Sample prog ram ”
in the index.
1. Making Effective Use of
This Manual
Chapter 1 27

Making Effective Use of This Manual
How To Use This Manual
28 Chapter 1

2. Overview of Remote
Control
2 Overview of Remote Control
This chapter provides an overview of the remote control system and the SCPI commands.
29

Overview of Remote Control
Types of remote control system
Types of remote control system
Depending on the system controller and the interface, you can configure 4 types of remote
control system as shown in the table below.
System controller Interface Overview
External controller
(external computer
such as PC and
workstation)
E5070B/E5071B
GPIB
(talker/listener mode)
LAN
USB
——
GPIB
(system controller
mode)
System to control the
other devices connected via GPIB from the
external controller.
For more information, refer to “GPIB remote
control system” on page 31.
System to control the
other devices connected via LAN from the
external controller.
For more information, refer to “LAN remote
control system” on page 33.
System to control the E5070B/E5071B and
other devices connected via USB from the
external controller.
For more information, refer to “USB Remote
Control System” on page 42.
System to control the
using built-in
For more information, refer to VBA
Programmers Guide.
System to control the
and external devices connected via GPIB
using built-in E5070B/E5071B VBA.
For more information, refer to VBA
Programmers Guide.
E5070B/E5071B and
E5070B/E5071B and
E5070B/E5071B itself
E5070B/E5071B VBA.
E5070B/E5071B itself
30 Chapter 2

GPIB remote control system
What is GPIB?
GPIB (General Purpose Interface Bus) is an interface standard for connecting computers
and peripherals, which supports the following international standards: IEEE 488.1,
IEC-625, IEEE 488.2, and JIS-C1901. The GPIB interface allows you to control the
Agilent E5070B/E5071B from an external computer. The computer sends commands and
instructions to the E5070B/E5071B and receives data sent from the E5070B/E5071B via
GPIB.
System configuration
Use GPIB cables to connect between the E5070B/E5071B, the external controller
(computer), and peripherals. Figure 2-1 shows the overview of the system configuration of
the GPIB remote control system.
Figure 2-1 Configuration of the GPIB remote control system
Overview of Remote Control
GPIB remote control system
2. Overview of Remote
Control
NOTE While the E5070B/E5071B is turned off, the SRQ status of the E5070B/E5071B is active.
To prevent an incorrect operation on the SRQ of the GPIB remote control system,
disconnect the E5070B/E5071B from the system when the E5070B/E5071B is turned off.
Chapter 2 31

Overview of Remote Control
GPIB remote control system
Required Equipment
1. E5070B/E5071B
2. External controller (computer)
Use a personal computer or workstation equipped with the GPIB interface. You need to
install software to control this instrument via GPIB into the external controller (for
example, HTBasic and Agilent VEE) and set the GPIB mode to talker/listener mode
(
[System] - Misc Setup - GPIB Setup - Talker/Listener Address).
3. Other devices (other instruments and/or peripherals that serve your purpose)
4. GPIB cables for connecting the E5070B/E5071B, the external controller, and other
devices
Scale of system you can construct
• You can connect up to 15 devices in a single GPIB system.
• The length of cables to connect between devices must be 4 m or less. The total length
of connecting cables in a single GPIB system must be 2 m × the number of connected
devices (including the controller) or less. You cannot construct the system in which the
total cable length exceeds 20 m.
• The number of connectors connected to an individual device must be 4 or less. If you
connect 5 or more connectors, excessive force is applied to the connector part, which
may result in failure.
• You can choose the device connection topology from start, linear, and combined. Loop
connection is not supported.
Device selector
The device selector is a unique value assigned to each device that is used by the controller
to select the control target (to send/receive messages) among devices connected on the
GPIB remote control system.
The device selector consists of a select code (usually , 7) and a GPIB address. For example,
when the select code is 7 and the GPIB address is 17, the device selector is 717. The select
code must be set for each system. The GPIB address must be set to a unique value for each
device, which is used to identify devices on the same system. In the description and sample
programs in this manual, it is assumed that the device selector is set to 717.
Setting the GPIB address of the E5070B/E5071B
[System] - GPIB Setup - Talker/Listener Address
32 Chapter 2

Overview of Remote Control
LAN remote control system
LAN remote control system
The LAN (Local Area Network) remote control system provides two methods: controlling
the E5070B/E5071B using the SICL-LAN server and controlling the E5070B/E5071B
using the telnet server.
System configuration
Use a LAN cable to connect between the E5070B/E5071B and the external controller
(computer). Figure 2-2 shows the overview of the system configuration of the LAN remote
control system.
Figure 2-2 Configuration of the LAN remote control system
2. Overview of Remote
Control
Required Equipment
1. E5070B/E5071B
2. External controller (personal computer or workstation that can be connected to LAN
and Agilent I/O Library is installed into)
3. Other devices (other instruments and/or peripherals that serve your purpose)
4. LAN cable for connecting the E5070B/E5071B with the external controller
Preparing the E5070B/E5071B
Before controlling the E5070B/E5071B via LAN, you need to configure the network
function. For detailed information on the procedure, refer to User’s Guide.
Chapter 2 33

Overview of Remote Control
LAN remote control system
Control over SICL-LAN server
In the control system using the SICL-LAN server, communication between the external
controller (client) and the E5070B/E5071B (server) is performed using the SICL-LAN
protocol. Communication is performed using SICL (Standard Instrument Control Library).
You can control th e E5070B/ E5 071B by programming using SICL or VISA with the C
language in the UNIX environment, or Visual C++, Visual Basic, or VEE in the Windows
environment.
Preparing the E5070B/E5071B
To communicate with the external controller, follow these steps to turn on the SICL-LAN
server of the E5070B/E5071B in advance.
Step 1. Turn on the SICL-LAN server of the E5070B/E5071B.
[System] - Misc Setup - Network Setup - SICL-LAN Server [ON]
Step 2. Set the GPIB address of the E5070B/E5071B for control with the SICL-LAN server. “XX”
represents an address number.
[System] - Misc Setup - Network Setup - SICL-LAN Address [XX]
NOTE You need to restart the E5070B/E5071B firmware after changing the on/off setting or
address setting of the SICL-LAN server.
Preparing the external controller
In order to establish communication to the E507 0B/E5071B using the TCP/IP protocol,
you need to set the I/O interface of the external controller in advance. This section shows
the setting procedure when using the external controller in the Windows environment.
NOTE You must install the Agilent I/O Libraries in advance.
Use Agilent I/O Libraries M.01.01 or Agilent I/O Libraries Suite 14 or later.
For further information on the I/O Libraries, see the Agilent I/O Libraries Manual.
The Agilent I/O Libraries may not be available for certain external controllers or OS
versions. For further details, refer to the Help guidance for the Agilent I/O Libraries.
34 Chapter 2

Overview of Remote Control
LAN remote control system
Step 1. From your PC’s Start menu, click Program - Agilent I/O Libraries Suite - Agilent
Connection Expert to open the Agilent Connection Expert setting screen.
2. Overview of Remote
Control
Step 2. In the Agilent Connection Expert setting screen, select
on this PC
frame, and then select I/O Configuration - Add Instrument on the menu.
LAN(TCPIP0) in the Instrument I/O
Step 3. In the Add Instrument screen, press OK as LAN has been selected.
Chapter 2 35
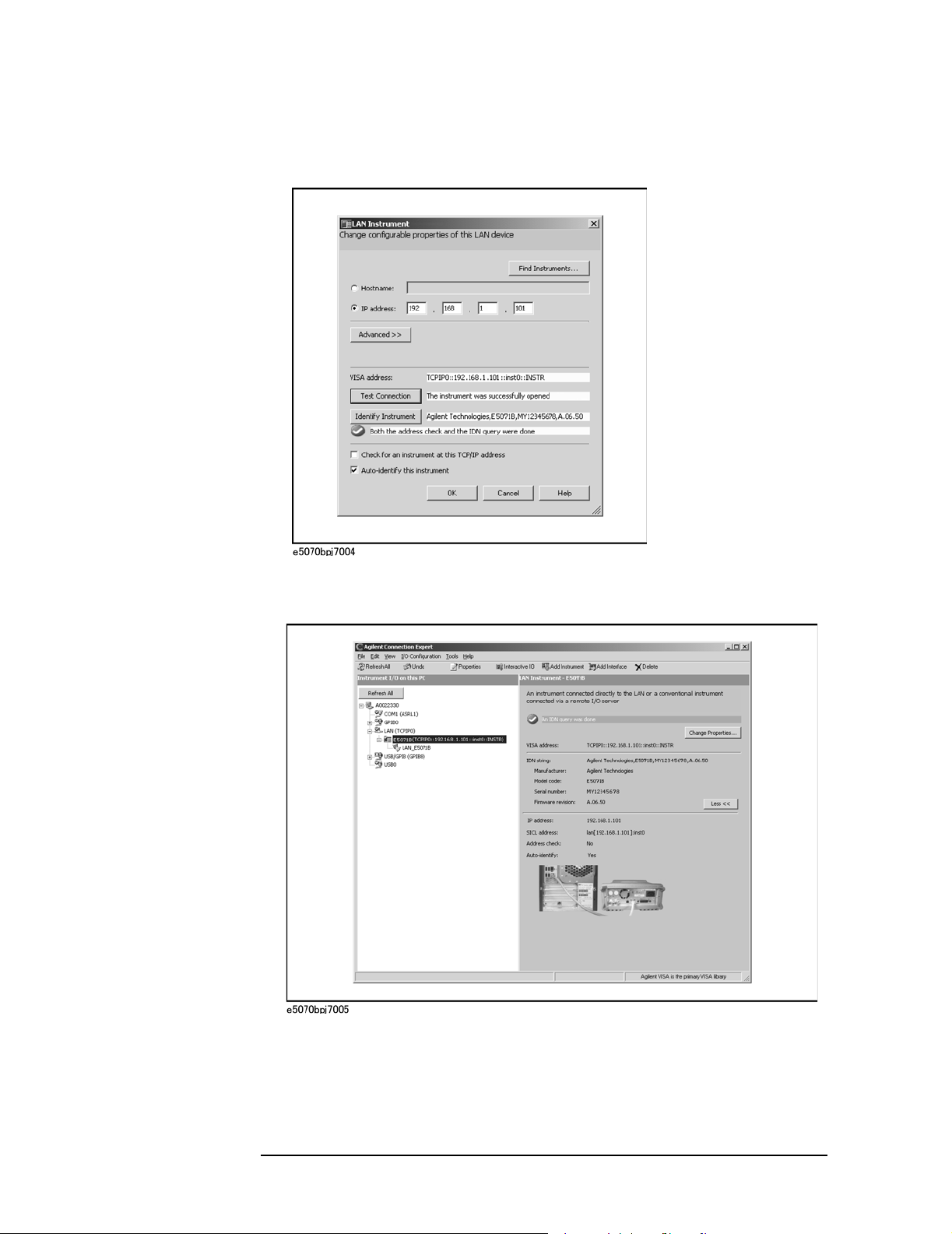
Overview of Remote Control
LAN remote control system
Step 4. In the LAN Instrument Properties screen, set up the IP address of the E5070B/E5071B and
click
OK.You can change settin gs as necessary. For details, refer to the Agilent I/O
Libraries Suite manual.
Step 5. In the Agilent Connection Expert screen, check that the E5070B/E50 71B has been added
under
LAN(TCPIP0) in the Instrument I/O on this PC frame.
36 Chapter 2

Overview of Remote Control
LAN remote control system
Control using C or Visual Basic
You can control the E5070B/E5071B by programming using SICL with the C language in
the UNIX environment, or Visual C++ or Visual Basic in the Windows environment.
For more information on the control method, see a sample program using the VBA macro
of Microsoft Excel described in “Control Using SICL-LAN Server” on page 265.
Control using Agilent VEE
Agilent VEE allows you to control the E5070B/E5071B via the I/O interface. The
following example shows how to control the E5070B/E5071B that is set as follows: the
address of the SICL-LAN server is 17 and the IP address is 192.168.0.1.
NOTE When using Agilent VEE for PC, use Agilent VEE Pro 6 for Windows or later.
2. Overview of Remote
Control
Step 1. On the Agilent EVE’s
Step 2. In the Instrument Manager setting screen, click
I/O menu, click Instrument Manager....
Add....
Step 3. The Instrument Properties setting screen appear. Make the settings as follows: Name (1 in
the figure below):
below):
GPIB, and Address (3 in the figure below): 917 (for the E5070B/E5071B, fixed to
9. 17 is the address of the SICL-LAN server). Then, click Gateway:
SICL_LAN (you can specify any name), Interface (2 in the figure
This host. The Select
or Enter Gateway setting screen appears. Enter the IP address or host name of the
E5070B/E5071B (4 in the figure below).
Figure 2-3 shows an example of control using the I/O interface that has been set in the
above procedure.
Chapter 2 37

Overview of Remote Control
LAN remote control system
Figure 2-3 Example of control using Agilent VEE
38 Chapter 2

Overview of Remote Control
LAN remote control system
Control over telnet server
In the control system over telnet server, communications are performed through connection
between the sockets provided by the processes of the external controller and the
E5070B/E5071B to establish a network path between them.
A socket is an endpoint for network connection; port 23 and port 5025 are provided for the
sockets for the E5070B/E5071B. Port 23 is provided for conversational control using telnet
(user interface program for the TELNET protocol) and port 5025 for control from a
program.
Preparing the E5070B/E5071B
T o communicate with the external controller, follow these steps to turn on the telnet server
of the E5070B/E5071B in advance.
[System] - Misc Setup - Network Setup - Telnet Server [ON]
2. Overview of Remote
Control
Chapter 2 39

Overview of Remote Control
LAN remote control system
Conversational control using telnet (using port 23)
You can use telnet to pe rform conversational control by sending SCPI commands to the
E5070B/E5071B on a message-by-message basis. For telnet, the socket of port 23 is used
for communications.
In this example, in order to show you the control procedure using telnet, you control the
E5070B/E5071B (IP address: 192.168.0.1 and host name: e5070a) from the external
controller in the Windows environment.
Step 1. Open the MS-DOS command prompt screen.
Step 2. At the MS-DOS prompt, type telnet 192.168.0.1 or telnet e5070a and press the return key.
Step 3. The telnet screen opens.
Step 4. Type a command and press the return key; it is sent to the E5070B/E5071B and executed.
If you enter a command that queries some data, the query response is displayed below the
line you have entered the command.
Figure 2-4 shows the screen after using the :SYST:PRES command on page 796 to reset,
the :SENS{1-16}:FREQ:STAR command on page 657 and :SENS{1-16}:FREQ:STOP
command on page 658 commands to set the sweep start value and stop value to 1 GHz and
2 GHz respectively, and checking the settings.
Figure 2-4 Example of control using telnet
Step 5. Select Disconnect from the Connect menu in the telnet screen (1 in Figure 2-4) to break the
connection to the E5070B/E5071B and select Exit from the Edit menu to exit the telnet. (In
other environment such as the UNIX environment, press ] while holding down the control
key. The telnet prompt appears. At the telnet prompt, type quit and press the return key.
The connection to the E5070B/E5071B breaks and telnet finishes.)
40 Chapter 2

Overview of Remote Control
LAN remote control system
Control from a program (using port 5025)
When controlling the E5070B/E5071B from a program on the external controller, use the
socket of port 5025 for connection.
NOTE Some functions such as service requests that are available in the GPIB remote control
system are not available in control over telnet server.
Control using C or Visual Basic
You can control th e E5070B/ E5 071B by socket programming using the C language in the
UNIX environment, or Visual C++ or Visual Basic in the Windows environment.
For socket programming, the library for network connection on the TCP/IP protocol is
required. For the UNIX environment, BSD (Berkeley Software Distribution) Sockets API
is available; for the Windows environment, WinSock (WinSock1.1 and WinSock2.0)
created by porting BSD Sockets to Windows and expanding it is available.
For more information on the control method, see a sample program for control using
WinSock described in “Controlling Using Telnet Server” on page 273.
Agilent Control using VEE
Agilent VEE allows you to control the E5070B/E5071B through the connection to the
socket of port 5025 using To/From Socket. Figure 2-5 shows an example (when the IP
address of the E5070B/E5071B is 192.168.0.1). Enter 5025 in the field to specify the port
for connection (1 in Figure 2-5) and enter the IP address or host name of the
E5070B/E5071B in the filed to specify the host name (2 in Figure 2-5).
Figure 2-5 Example of control using Agilent VEE
2. Overview of Remote
Control
Chapter 2 41

Overview of Remote Control
USB Remote Control System
USB Remote Control System
The USB (Universal Serial Bus) remote control system provides device control via USB
that is equivalent to control via GRIP. Connection is made through an interface in
compliance with USBTMC-USB488 and USB 2.0.
System configuration
The USB remote control system controls instruments that use the name “alias.” There is no
such address for GPIB connections.
Use a LAN cable to connect the E5070B/E5071B to an external controller (personal
computer). Figure 2-6 shows an overview of the system configuration for the USB remote
control system.
Figure 2-6 USB Remote Control System Configuration
Required Equipment
1. E5070B/E5071B (models with USB (USBTMC) interface port (type B)).
2. External controller (personal computer with installed Agilent I/O Li braries and USB
host port (type A)).
3. Other USB compatible devices (instruments and/or peripherals for specific purposes).
4. USB cable connecting E5070B/E5071B and external controller (with type A/4-prong
male or type B/4-prong male connectors depending on device used).
USB Port Types
There are two standard types of USB ports. The external controller (PC) must be connected
42 Chapter 2

Overview of Remote Control
USB Remote Control System
via the USB host port (type A), while the E5070B/E5071B and other USB compatible
devices must be connected via the USB interface port (type B).
Type A: USB host port
Type B: USB (USBTMC) interface port
Preparing E5070B/E5071B
You do no t have to configu re any softkey or co mm and of the E5070B/E5071B in order to
control the E5070B/E5071B from an external controller. Simply connect a USB cable to
the USB interface port.
Preparing External Controller
In order to establish communication with the E5070B/E5071B via USB, you must set up
the I/O interface of the external controller in advance. The USB can identify devices
automatically, so once you connect a USB cable to a tar get device, a dialog box will appear
for USB device registration.
2. Overview of Remote
Control
NOTE The E5070B/E5071B will be identified as new device if its serial number has been
changed.
NOTE You must install the Agilent I/O Libraries in advance. Use Agilent I/O Libraries M.01.01
or Agilent I/O Libraries Suite 14 or later.
For further information on the I/O Libraries, see the Agilent I/O Libraries Manual.
The Agilent I/O Libraries may not be available for certain external controllers or OS
versions. For further details, refer to the Help guidance for the Agilent I/O Libraries.
Chapter 2 43

Overview of Remote Control
USB Remote Control System
1. Registering Alias When USB Cable Is Connected
When new device is connected via USB cable, the following dialog box will appear
automatically.Follow the steps below to register alias, when you use the Agilent I/O
Libraries Suite 14.
Step 1. In the Assign USB device alias dialog box, enter an alias and the click the
Figure 2-7 Registering Alias
OK button.
NOTE For alias, use the ASCII format less than 127 digits.Alias is upper/lower case insensitive.
If "Never show this dialog" is selected in the "Show this dialog" frame, the dialog box does
not appear even if a new device is connected.
NOTE Once new device is identified, the "New Hardware Search Wizard" will start.Follow the
instruction to implement the processing.
2. Changing Alias on Setting Screen
The following are steps using the Agilent I/O Libraries Suite 14.
Step 1. Step 1: From the Start menu of your PC, click Program - Agilent IO Libraries Suite
-Agilent Connection Expert to open the Config setting screen.
Step 2. In the Config setting screen, select the alias names from
I/O on this PC
frame, and then use the Change Properties from I/O Configuration on the
USB0 onward in the Instrument
menu bar.
44 Chapter 2

Figure 2-8 Changing Alias
Overview of Remote Control
USB Remote Control System
2. Overview of Remote
Control
Control using C or Visual Basic
You can control the E5070B/E5071B by programming using Visual C++ or Visual Basic in
the Windows environment as well as SICL/VISA.For further information on controlling
the E5070B/E5071B, see the manual of SICL or VISA.For Agilent I/O Libraries, use
Agilent I/O Libraries M.01.01 or Agilent I/O Libraries Suite 14.
You may use alias in the prog ramming using SICL/VISA.
The following example shows an OPEN command to control the E5070B/E5071B to
which alias is given as ENA_USBIF.
SICL id = iopen("ENA_USBIF")
VISA viOpen(...,"ENA_USBIF",...)
NOTE For further details of the programming using SICL/VISA, see the SICL Users Guide or the
VISA Users Guide.
Chapter 2 45

Overview of Remote Control
USB Remote Control System
Control using Agilent VEE
Agilent VEE allows you to control the E5070B/E5071B via the direct I/O interface.The
following example shows how to control the E5070B/E5071B to which alias is given as
ENA_USBIF.
NOTE When using Agilent VEE for PC, use Agilent VEE Pro 7 for Windows or later version.
Step 1. On the Agilent VEE's
Step 2. In the Instrument Manager setting screen, click
I/O menu, click Instrument Manager....
Add....
Step 3. The Instrument Properties dialog box appears.Specify Name:
any other name acceptable), Interface:
below, USB port number), and Alias:
the IO Config setting screen), then click
USB(2 shown below), Board Number :0(3 shown
ENA_USBIF(4 shown below which is registered in
OK.
ENA_USBIF(1 shown below,
Figure 2-9shows an example of control using the direct I/O interface that has been set in
the above procedures.
46 Chapter 2

Figure 2-9 Sample Control Using Agilent VEE (USB)
Overview of Remote Control
USB Remote Control System
2. Overview of Remote
Control
Chapter 2 47

Overview of Remote Control
Sending SCPI command messages
Sending SCPI command messages
Types and structure of commands
The SCPI commands available for the E5070B/E5071B are classified into 2 groups as
follows.
E5070B/E5071B commands
Commands specific to the E5070B/E5071B. They cover all measurement functions that the
E5070B/E5071B has and some general-purpose functions. The commands in this group are
arranged in a hierarchical structure called the command tree (see “Command tree” on
page 828). Each command consists of character strings (mnemonics) indicating each
hierarchical level and colon (:) separators between hierarchical levels.
IEEE common commands
Commands to cover general-purpose functions defined in IEEE488.2 that are available
commonly to instruments that support this standard. The commands in this group have an
asterisk (*) at the beginning. For the commands in this group, there is no hierarchical
structure.
Concepts of the command tree
The commands at the top of the command tree are called “root command” or simply
“root.” To access lower level commands in the tree, you need to specify a specific path like
a directory path in the DOS file system. After po wer-on or reset, the current path is set to
the root. Special characters in messages change the path setting as described below.
Message terminator A message terminator such as the
<new line> character sets the current path to the root.
Colon (:) A colon between 2 command mnemonics lowers the level of the
current path in the command tree. A colon used as the first character of
a command specifies the command mnemonic that follows as the
root-level command.
Semicolon (;) A semicolon does not change the current path and separates 2
commands in the same message.
Figure 2-10 shows an example of how to use colons and semicolons to efficiently access
commands in the command tree.
48 Chapter 2

Figure 2-10 Using colons and semicolons
Overview of Remote Control
Sending SCPI command messages
2. Overview of Remote
Control
Grammar of messages
This section describes the grammar to send program messages via GPIB. Program
messages are messages that the user sends to the instrument from the external controller to
control the instrument. A program message consists of 1 or more commands and their
necessary parameters.
Upper/lower case sensitivity
Upper/lower case insensitive.
Program message terminator
A program message must be terminated with one of the 3 program message terminators:
<new line>, <^END>, or <new line><^END>. <^END> indicates that EOI on the GPIB
interface becomes active at the instant when the immediately previous data byte is sent. For
example, the OUTPUT command of HTBasic automatically sends the message terminator
after the last data byte.
Parameters
A space (ASCII code: 32) is required between a command and its first parameter. When
sending several parameters in a single command, separate each parameter with a comma
(,).
Message including several commands
When sending 2 or more commands in a single message, separate each command with a
semicolon (;). The following example shows how to send the *CLS command and the
:STAT:PRES command in a single message using HTBasic.
OUTPUT 717;"*CLS;:STAT:PRES"
Chapter 2 49

Overview of Remote Control
Sending SCPI command messages
Remote mode
The E5070B/E5071B does not provide remote mode. Therefore, even if you send a GPIB
command, it never enters into remote mode automatically. There is no local key to release
remote mode.
If you need to prevent misoperation during remote control due to entry from the front panel
or mouse, lock the input devices using the following commands.
• :SYST:KLOC:KBD command on page 794
• :SYST:KLOC:MOU S command on page 795
50 Chapter 2

3 Setting Up the Analyzer
3. Setting Up the Analyzer
This chapter describes how to configure measurement conditions and how to configure the
way the instrument displays measurement results on the LCD.
51

Setting Up the Analyzer
Selecting the Active Channel/Trace
Selecting the Active Channel/Trace
You can configure the E5070 B/E507 1B by using various commands. Some commands
require you to specify and work with a particular channel or trace, while other commands
do not have this restriction.
Those commands that do not require you to specify a particular channel or trace apply to
the currently active channels and traces. Before issuing such a command, therefore, you
must make the appropriate channels and traces active.
To make a channel active, use the following command:
• :DISP:WIND{1-16}:ACT on page 470
NOTE Only the currently displayed channels can be active channels. Therefore, you must display
the desired channels by using the :DISP:SPL command on page 466 before making them
active.
To make a trace active, use the following command:
• :CALC{1-16}:PAR{1-16}:SEL on page 424
NOTE Only the currently displayed traces can be active traces. Therefore, you must display the
desired traces by using the :CALC{1-16}:PAR:COUN command on page 421 before
making them active.
52 Chapter 3

Setting Up the Analyzer
Configuring Measurement Conditions
Configuring Measurement Conditions
Setting the number of traces
When you set the number of traces, that setting determines the upper limit trace number;
for example, if the setting is 3, traces 1 through 3 will be displayed. To set the number of
traces, use the following command:
• :CALC{1-16}:PAR:COUN on page 421
NOTE Only the currently displayed traces can be active traces. Therefore, you must set the
number of traces appropriately before making them active.
Selecting measurement parameters
To select the measurement parameter (S parameter) for each trace, use the following
command:
• :CALC{1-16}:PAR{1-16}:DEF on page 422
When you use the Balance-Unbalance Conversion feature, you can select the mixed mode
S parameter as well. For more information, refer to “Analysis Using the Fixture Simulator”
on page 150.
Setting the sweep condition (Stimulus)
How you can set the sweep condition depends on the sweep type. You can choose between
the following four sweep types:
• Linear sweep
• Log sweep
• Segment sweep
• Power sweep
To select one of the above sweep types, use the following command:
• :SENS{1-16}:SWE:TYPE on page 696
To select the sweep mode (stepped/fast stepped/swept/fast swept), use the following
command:
• :SENS{1-16}:SWE:GEN on page 692
3. Setting Up the Analyzer
Turning On/Off stimulus signal output
T o turn on/off the stimulus signal output, use the following commands. For example, if the
power output is automatically turned off due to the power trip feature, remove the cause of
the over-input and turn on the stimulus signal output by executing the following command.
You canno t pe rform measurement until you turn on the stimulus signal output.
• :OUTP on page 527
Chapter 3 53

Setting Up the Analyzer
Configuring Measurement Conditions
Configuring linear sweep settings
To set the sweep range, use the following commands:
Start value :SENS{1-16}:FREQ:STAR on page 657
Stop value :SENS{1-16}:FREQ:STOP on page 658
Center value :SENS{1-16}:FREQ:CENT on page 654
Span value :SENS{1-16}:FREQ:SPAN on page 656
To set the number of measurement points, use the following command:
• :SENS{1-16}:SWE:POIN on page 693
To set the measurement time, use the following commands:
Measurement time :SENS{1-16}:SWE:TIME on page 694
Turning on/off auto setting :SENS{1-16}:SWE:TIME:AUTO on page 695
To set the sweep delay time, use the following command:
• :SENS{1-16}:SWE:DEL on page 691
To set the IF bandwidth, use the one of the following commands (both provide the same
function):
• :SENS{1-16}:BAND on page 545
• :SENS{1-16}:BWID on page 546
Setting power level
When the instrument is equipped with the power range expansion function (Option 214,
314, or 414), you can select the power range by using the following command:
• :SOUR{1-16}:POW:ATT on page 705
To set the power level, use the following command:
• :SOUR{1-16}:POW on page 704
To select whether to output the same power level (the set value for port 1) or a different
power level for each port, use the following command:
• :SOUR{1-16}:POW:PORT:COUP on page 709
• :SOUR{1-16}:POW:PORT{1-4} on page 710
To set the correction of power-level attenuation so that it’s proportional to the frequency
(power slope feature), use the following command:
• :SOUR{1-16}:POW:SLOP:STAT on page 718
• :SOUR{1-16}:POW:SLOP on page 71 7
NOTE If you turn on the power slope feature, the sweep mode is changed to the step mode.
54 Chapter 3

Setting Up the Analyzer
Configuring Measurement Conditions
Configuring segment sweep settings
When you opt to use segment sweep, you can set all items (in the segment sweep table) by
using a single command:
• :SENS{1-16}:SEGM:DATA on page 688
Alternatively, you can configure the segment sweep settings based on the data contained in
a CSV file by issuing the following command:
• :MMEM:LOAD:SEGM on page 504
Also, you can save the contents of the current segment sweep table to a file by issuing the
following command:
• :MMEM:STOR:SEGM on page 518
For more information on how to save and load the segment sweep table, refer to “Saving
and recalling the segment sweep table.”
Configuring power sweep settings
To set the sweep range, use the following commands:
Start value :SOUR{1-16}:POW:STAR on page 720
Stop value :SOUR{1-16}:POW:STOP on page 721
Center value :SOUR{1-16}:POW:CENT on page 708
Span value :SOUR{1-16}:POW:SPAN on page 719
To set the fixed frequency (CW frequency), use the following command:
• :SENS{1-16}:FREQ on page 653
To set the number of points, the sweep time, the sweep delay time, and the IF bandwidth,
use the same commands as for the linear/log sweep.
Configuring Averaging Settings
To configure the smoothing settings, use the following commands:
On/off :SENS{1-16}:AVER on page 543
Averaging factor :SENS{1-16}:AVER:COUN on page 544
Clear (Restart) :SENS{1-16}:AVER:CLE on page 543
For averaging, normally, the instrument must be triggered according to the number of
averaging; however, when the averaging trigger is turned on, sweeps for the number of
averaging can be executed by a single trigger. For details on the averaging trigger, refer to
“Averaging Trigger Function” on page 138 of Chapter 5, “Making a Measurement,”
3. Setting Up the Analyzer
Chapter 3 55

Setting Up the Analyzer
Configuring Measurement Conditions
Setting the System Z0
NOTE This function is available with the firmware version 3.01 or greater.
To set the system characteristic impedance (Z0), use the following command:
• :SENS:CORR:IMP on page 537
56 Chapter 3

Setting Up the Analyzer
Configuring Display Settings
Configuring Display Settings
Setting the layout of windows and graphs
You can sp lit the E5070B/E5071B’s LCD screen into multiple windows that display
channel-specific result information, and the window layout can be selected from a number
of variations. In addition, you can place on screen a segment sweep table or echo window,
which you can use to display messages from your custom program.
Selecting the window layout (Channel Display Mode)
One window displays the results for a single channel. You cannot have a single window
display the results from more than one channel. This means that setting the window layout
determines the number of channels displayed on screen.
To select one of the 19 different window layouts shown in Figure 3-1, use the following
command:
• :DISP:SPL on page 466
Selecting the graph layout (Trace Display Mode)
3. Setting Up the Analyzer
You can place a number of trace graphs in each window by selecting one of the pre-defined
graph layouts. The number of graphs differs depending on your selected graph layout. If
the number of graphs is equal to or larger than the number of traces (set by the
:CALC{1-16}:PAR:COUN command on page 421), each graph always displays one trace.
On the other hand, if the number of graphs is smaller than the number of traces, some of
the graphs display two or more traces. Graph 1 is populated with trace 1, graph 2 with trace
2, and so on. Traces whose numbers exceed the last graph's number will populate graph 1,
graph 2, and so on.
To select one of the 19 different graph layouts shown in Figure 3-1, use the following
command:
• :DISP:WIND{1-16}:SPL on page 475
Maximizing a window or a trace graph
When you have multiple windows displayed, you can maximize the active channel window
so that it covers the entire screen area. To maximize a window, use the following
command:
• :DISP:MAX on page 465
Similarly, when you have multiple traces displayed, you can maximize the active trace so
that it extends throughout the entire window. To maximize a trace, use the following
command:
• :DISP:WIND{1-16}:MAX on page 474
Chapter 3 57

Setting Up the Analyzer
Configuring Display Settings
Figure 3-1 Window/graph layouts and command parameters
58 Chapter 3

Setting Up the Analyzer
Configuring Display Settings
Showing/hiding a table or echo window
You can displ ay the fol lowing items at the bottom of the LCD screen:
• Segment sweep table
• Limit table
• Marker list table
• Echo window (a window that displays messages from a custom program)
• Loss compensation table
• Power sensor’s calibration factor table
To show or hide each of the above items, use the following command:
• :DISP:TABL on page 468
You can have two or more of the above items displayed at a time. The screen displays only
the selected item by using the following command:
• :DISP:TABL:TYPE on page 469
Showing/hiding softkey labels
You can show or hide the softkey labels placed alongside the right-hand edge of the LCD
screen. To show or hide the softkey labels, use the following command:
• :DISP:SKEY on page 465
3. Setting Up the Analyzer
Chapter 3 59

Setting Up the Analyzer
Configuring Display Settings
Configuring trace display settings
Selecting which traces to display
Each trace has two different representations: data and memory traces. You can show or
hide the data and memory traces independently of each other. To show or hide the data or
memory traces, use the following commands:
Data trace :DISP:WIND{1-16}:TRAC{1-16}:STAT on page 481
Memory trace :DISP:WIND{1-16}:TRAC{1-16}:ANN:MARK:POS:X on
page 478
To copy the data trace to the memory trace, use the following command:
• :CALC{1-16}:MATH:MEM on page 416
Configuring cross-trace math operations
You can perform math operations between the data and memory traces and have the results
displayed as the data trace. To perform cross-trace math operations, use the following
command:
• :CALC{1-16}:MATH:FUNC on page 415
Configuring smoothing settings
To turn on/off smoothing, use the following command:
• :CALC{1-16}:SMO on page 433
The smoothing aperture is expressed as a percentage with respect to the sweep range. To
set the smoothing aperture, use the following command:
• :CALC{1-16}:SMO:APER on page 434
Selecting the data format
You can select the following data formats:
R Rectangular display formats
• Log magnitude format
•Phase format
• Group delay format
• Linear magnitude format
• SWR format
• Real format
• Imaginary format
• Expanded phase format
• Positive phase format
R Imaginary format
R Expanded phase format
To select the measurement parameter data format, use the following command:
60 Chapter 3

• :CALC{1-16}:FORM on page 321
Setting Up the Analyzer
Configuring Display Settings
3. Setting Up the Analyzer
Chapter 3 61

Setting Up the Analyzer
Configuring Display Settings
Configuring the display scale
Depending on the measurement parameter data format, you can configure the display scale
in one of the following two ways:
Rectangular display formats:
When you use one of rectangular display formats (Logarithmic magnitude/Phase/ Group
delay/Linear magnitude/SWR/Real/Imaginary/Expanded phase/Positive phase), you can
configure the display scale by setting the following four items:
Number of divisions :DISP:WIND{1-16}:Y:DIV on page 486
Scale per division :DISP:WIND{1-16}:TRAC{1-16}:Y:PDIV on page 482
Reference graticule line :DISP:WIND{1-16}:TRAC{1-16}:Y:RPOS on page484
Reference graticule line value :DISP:WIND{1-16}:TRAC{1-16}:Y:RLEV on page 483
NOTE The number of divisions is a channel-wide setting (shared among all traces), while the
remaining three settings are trace-specific.
You can sh ow or hide graticule label (the label on the left-hand side of the graticule lines)
by issuing the following command:
• :DISP:WIND{1-16}:LAB on page 473
Smith chart/Polar formats:
When you are using one of Smith chart/Polar formats, you can only set the full scale value
(the outermost circle’s value) using the following command:
• :DISP:WIND{1-16}:TRAC{1-16}:Y:PDIV on page 482
Auto Scale
You can use Auto Scale to automatically set the display scale. This feature works by
automatically adjusting the reference division line value and the scale value per division
when you are using one of the rectangular display formats or the full scale value when you
are using one of Smith chart/Polar formats.
To perform Auto Scale, use the following command:
• :DISP:WIND{1-16}:TRAC{1-16}:Y:AUTO on page 481
62 Chapter 3

Setting Up the Analyzer
Configuring Display Settings
Printing a message in the echo window
You can pri nt a message in the echo wi ndow by issuing the following command:
• :DISP:ECHO on page 461
You can clear any m essage displayed in the echo window by issuing the following
command:
• :DISP:ECHO:CLE on page 461
Turning On/Off display update
To turn on/off the update of the LCD screen, use the following command:
• :DISP:ENAB on page 462
Showing/hiding frequencies
To show or hide frequencies on the LCD screen, use the following command:
• :DISP:ANN:FREQ on page 454
Showing or hiding the title
3. Setting Up the Analyzer
To show or hide the title, use the following command:
• :DISP:WIND{1-16}:TITL on page 476
To define the title string that appears in the title display area, use the following command:
• :DISP:WIND{1-16}:TITL:DATA on page 477
Configuring date/time display
T o show or hide the current date and time on the left-hand side of the instrument status bar,
use the following command:
• :DISP:CLOC on page 455
To set the date and time, use the following command:
• :SYST:DATE on page 790
• :SYST:UPR on page 801
Turning On/Off the LCD backlight
To turn on/off the LCD backlight, use the following command (note that turning off the
backlight makes the screen unreadable):
• :SYST:BACK on page 779
Chapter 3 63
Setting Up the Analyzer
Configuring Display Settings
Setting display colors
Selecting display mode
You can sel ect the one of two LCD displ a y modes: normal display (black background) or
inverted display (white background).
To select the display mode, use the following command:
• :DISP:IMAG on page 464
Setting display color for each item
To set the display colors, use the following commands:
Data trace :DISP:COL{1-2}:TRAC{1-16}:DATA on page 459
Memory trace :DISP:COL{1-2}:TRAC{1-16}:MEM on page 460
Graph :DISP:COL{1-2}:GRAT{1-2} on page 457
Limit test :DISP:COL{1-2}:LIM{1-2} on page458
Background :DISP:COL{1-2}:BACK on page 456
Resetting display colors to factory state
You can reset the display colors in normal display and inverted display to the preset factory
state.
To reset the display colors, use the following command:
• :DISP:COL{1-2}:RES on page 458
64 Chapter 3

Setting Up the Analyzer
Saving and Loading the Settings
Saving and Loading the Settings
You can save the settings for measurement conditions and screen disp lay to a file along
with other instrument settings, and these settings can later be loaded from the file.
Once you have saved the measurement condition and screen display settings to a file, you
can later load them whenever necessary; therefore, you can quickly modify the settings
loaded from a file to create new settings without having to issue many commands.
To save the current settings to a file, use the following command:
• :MMEM:STOR on page 506
To load the settings from a file, use the following command:
• :MMEM:LOAD on page 495
For more information on how to save and load the settings, refer to “Saving and recalling
instrument status.”
3. Setting Up the Analyzer
Chapter 3 65

Setting Up the Analyzer
Sample Program
Sample Program
Example 3-1 is a sample program that demonstrates how to configure measurement
conditions. You can find the source file of this program, named setup.htb, on the sample
program disk.
The sample program puts the instrument into the preset state, configures it as shown in
Table 3-1, and saves the settings to a file named “Ex_3_1.sta”.
Table 3-1 Target settings in Example 3-1
Item Setting
Window Layout Channel 1 in the upper
Channel 1 Sweep type Segment
Sweep range See Table 3-2.
Number of measurement points
IF bandwidth
Power
Number of traces 4
Graph Layout Four graphs at upper left,
Trace 1 Measurement parameter S11
Trace 2 Measurement parameter S21
Trace 3 Measurement parameter S12
Trace 4 Measurement parameter S22
window (2/3 of the screen
height) and channel 2 in the
lower window (1/3 of the
screen height)
upper right, lower left, and
lower right.
Data format Smith chart (Lin)
Full-scale value 2
Data format Log magnitude
Reference division line
number
Reference division line
value
Scale per division 10 dBm
Data format Log magnitude
Reference division line
number
Reference division line
value
Scale per division 10 dBm
Data format Smith chart (Lin)
Full-scale value 2
9
2
9
2
66 Chapter 3

Table 3-1 Target settings in Example 3-1
Item Setting
Channel 2 Sweep type Linear
Sweep range Center value 1.9 GHz
Number of measurement points 101
IF bandwidth 70 kHz
Power 0 dBm
Number of traces 4
Graph Layout Two graphs at left and right
Trace 1 Measurement parameter S21
Trace 2 Measurement parameter S22
Setting Up the Analyzer
Sample Program
Span value 500 MHz
Data format Log magnitude
Reference division line
number
Reference division line
value
Scale per division 10 dBm
Data format Smith chart (Lin)
Full-scale value 2
9
2
3. Setting Up the Analyzer
Table 3-2 Segment table for channel 1
Segment
Number
1 1.7 GHz 1.9 GHz 21 50 kHz 0 dBm
2 1.9 GHz 2 GHz 101 10 kHz -10 dBm
3 2 GHz 2.2 GHz 21 50 kHz 0 dBm
Start value Stop value
Number of
measurement
points
IF bandwidth Power
Chapter 3 67

Setting Up the Analyzer
Sample Program
The program is described in detail below:
Line 70 Assigns a GPIB address to the I/O pass.
Line 90 Stores the number of channel 1’s sweep segments into the Segm
variable.
Lines 100 to 150 These lines store the start and stop values for channel 1’s segments 1
through 3 into the Star1(*) and Stop1(*) variables, respectively.
Lines 160 to 170 These lines store channel 2’s center and span values into the Star2 and
Stop2 variables, respectively.
Lines 180 to 210 These lines store the number of points for channel 1’s segments 1
through 3 into the Nop1(*) variable and the number of measurement
points for channel 2 into the Nop2 variable.
Lines 220 to 250 These lines store the IF bandwidth for channel 1’s segments 1 through
3 into the If_bw1(*) variable and the IF bandwidth for channel 2 into
the If_bw2 variable.
Lines 260 to 290 These lines store the power for channel 1’s segments 1 through 3 into
the Pow1(*) variable and the power for channel 2 into the Pow2
variable.
Lines 300 to 310 These lines store the number of channel 1’s traces into the Num_of_tr1
variable and the number of channel 2’s traces into the Num_of_tr2
variable.
Lines 320 to 330 These lines store channel 1’s graph layout into the Allocate1$ variable
and channel 2’s graph layout into the Allocate2$ variable.
Lines 340 to 390 These lines store the measurement parameters for channel 1’s traces 1
through 4 into the Para1$(*) variable and the measurement parameters
for channel 2’s traces 1 through 2 into the Para2$(*) variable.
Lines 400 to 450 These lines store the data formats for chann e l 1’s traces 1 through 4
into the Fmt1$(*) variable and the data formats for channel 2’s traces 1
through 2 into the Fmt2$(*) variable.
Lines 460 to 480 These lines store the reference division line numbers for channel 1’s
traces 2 through 3 into the Ref_pos1(*) variable and the reference
division line numbers for channel 2's trace 1 into the Ref_pos2(*)
variable.
Lines 490 to 510 These lines store the reference division line values for channel 1’s
traces 2 through 3 into the Ref_lev1(*) variable and the reference
division line values for channel 2’s trace 1 into the Ref_lev2(*)
variable.
Lines 520 to 570 These lines store the data formats for chann e l 1’s traces 1 through 4
into the Fmt1$(*) variable and the data formats for channel 2’s traces 1
through 2 into the Fmt2$(*) variable.
Line 580 Stores the name of the file into the File$ variable.
Line 600 Puts the instrument into preset state.
Line 620 Places the window for channel 1 in the upper part of the LCD screen
and the window for channel 2 in the lower part.
Lines 630 to 640 These lines turn on Continuous Acti vation mode for channels 1 and 2.
68 Chapter 3

Setting Up the Analyzer
Sample Program
Line 680 Sets channel 1’s sweep type to “segment”.
Lines 690 to 730 These lines set up the segment table for channel 1.
Line 600: Sends the command that sets up the segment table along
with the parameter header (“5,0,1,1,0,0” causes the IF bandwidth
and power to be set on a segment-by-segment basis; Segm
represents the number of segments).
Lines 700 to 730: Send the data for the start and stop values,
number of points, IF bandwidth, and power (Star1, Stop1, Nop1,
If_bw1, Pow1) on a segment-by-segment basis.
Lines 750 to 760 For channel 1, these lines set the number of traces to Num_of_tr1 and
the graph layout to Allocate1$.
Lines 770 to 890 For channel 1, the program iterates the following loop while
incrementing i from 1 to Num_of_tr1 for each trace.
Line 780: Sets the measurement parameter to Para1$(i).
Line 790: Makes trace(i) active.
Line 800: Sets the data format to Fmt1$(i).
Line 830: If the data format is Smith chart or polar, this line sets
the full-scale value to Scale1(i).
3. Setting Up the Analyzer
Lines 850 to 870: If the data format is neither Smith chart nor
polar, these lines set the reference division line number to
Ref_pos1(i), the reference division line value to Ref_lev1(i), and
the scale per division to Scale1(i).
Line 930 Sets channel 2’s sweep type to “linear”.
Lines 940 to 980 For channel 2, these lines set the center value to Cent2, the span value
to Span2, the number of measurement points to Nop2, the IF
bandwidth to If_bw2, and the power to Pow2.
Lines 1000 to 1010 For channel 2, these lines set the number of traces to Num_of_tr2 and
the graph layout to Allocate2$.
Lines 1020 to 1140 For channel 2, the program iterates the following loop while
incrementing i from 1 to Num_of_tr2 for each trace.
Line 1030: Sets the measurement parameter to Para2$(i).
Line 1040: Makes trace(i) active.
Line 1050: Sets the data format to Fmt2$(i).
Line 1080: If the data format is Smith chart or polar, this line sets
the full-scale value to Scale2(i).
Lines 1100 to 1120: If the data format is neither Smith chart nor
polar, these lines set the reference division line number to
Ref_pos2(i), the reference division line value to Ref_lev2(i), and
the scale per division to Scale2(i).
Line 1160 Saves the settings of the E5070B/E5071B under the file name File$.
Chapter 3 69

Setting Up the Analyzer
Sample Program
Example 3-1 Configuring measurement conditions (setup.htb)
10 DIM Allocate1$[9],Allocate2$[9],File$[20]
20 DIM Para1$(1:4)[9],Para2$(1:2)[9],Fmt1$(1:4)[9],Fmt2$(1:2)[9]
30 REAL Star1(1:3),Stop1(1:3),Pow1(1:3),Cent2,Span2,Pow2
40 REAL Ref_rev1(1:4),Ref_rev2(1:2),Scale1(1:4),Scale2(1:2)
50 INTEGER Segm,Nop1(1:3),Nop2,Num_of_tr1,Num_of_tr2
60 INTEGER Ref_pos1(1:4),Ref_pos2(1:2),I
70 ASSIGN @Agte507x TO 717
80 !
90 Segm=3 ! Number of Segment Ch.1 : 3
100 Star1(1)=1.7E+9 ! Start Frequency Ch.1 Segm.1: 1.7 GHz
110 Star1(2)=1.9E+9 ! Segm.2: 1.9 GHz
120 Star1(3)=2.E+9 ! Segm.3: 2 GHz
130 Stop1(1)=1.9E+9 ! Stop Frequency Ch.1 Segm.1: 1.9 GHz
140 Stop1(2)=2.E+9 ! Segm.2: 2 GHz
150 Stop1(3)=2.2E+9 ! Segm.3: 2.2 GHz
160 Cent2=1.9E+9 ! Center Frequency Ch.2 : 1.9 GHz
170 Span2=5.00E+8 ! Span Ch.2 : 500 MHz
180 Nop1(1)=21 ! Number Ch.1 Segm.1: 21
190 Nop1(2)=101 ! of Points Segm.2: 101
200 Nop1(3)=21 ! Segm.3: 21
210 Nop2=101 ! Ch.2 : 101
220 If_bw1(1)=5.0E+4 ! IF Bandwidth Ch.1 Segm.1: 50 kHz
230 If_bw1(2)=1.0E+4 ! Segm.2: 10 kHz
240 If_bw1(3)=5.0E+4 ! Segm.3: 50 kHz
250 If_bw2=7.0E+4 ! Ch.2 : 70 kHz
260 Pow1(1)=0 ! Power Ch.1 Segm.1: 0 dBm
270 Pow1(2)=-10 ! Segm.2: -10 dBm
280 Pow1(3)=0 ! Segm.3: 0 dBm
290 Pow2=0 ! Ch.2 : 0 dBm
300 Num_of_tr1=4 ! Number Ch.1 : 4
310 Num_of_tr2=2 ! of Traces Ch.2 : 2
320 Allocate1$="D12_34" ! Allocate Traces Ch.1 : D12_34
330 Allocate2$="D12" ! Ch.2 : D12
340 Para1$(1)="S11" ! Measurement Ch.1 Trace1: S11
350 Para1$(2)="S21" ! Parameter Trace2: S21
360 Para1$(3)="S12" ! Trace3: S12
370 Para1$(4)="S22" ! Trace4: S22
380 Para2$(1)="S31" ! Ch.2 Trace1: S31
390 Para2$(2)="S33" ! Trace2: S33
400 Fmt1$(1)="SLIN" ! Data Format Ch.1 Trace1: Smith
410 Fmt1$(2)="MLOG" ! Trace2: Log Mag
420 Fmt1$(3)="MLOG" ! Trace3: Log Mag
430 Fmt1$(4)="SLIN" ! Trace4: Smith
440 Fmt2$(1)="MLOG" ! Ch.2 Trace1: Log Mag
450 Fmt2$(2)="SLIN" ! Trace2: Smith
460 Ref_pos1(2)=9 ! Reference Ch.1 Trace2: 9
470 Ref_pos1(3)=9 ! Position Trace3: 9
480 Ref_pos2(1)=9 ! Ch.2 Trace1: 9
490 Ref_lev1(2)=0 ! Reference Level Ch.1 Trace2: 0 dBm
500 Ref_lev1(3)=0 ! Trace3: 0 dBm
510 Ref_lev2(1)=0 ! Ch.2 Trace1: 0 dBm
520 Scale1(1)=2 ! Scale Ch.1 Trace1: 2
530 Scale1(2)=10 ! Trace2: 10 dBm
540 Scale1(3)=10 ! Trace3: 10 dBm
550 Scale1(4)=2 ! Trace4: 2
560 Scale2(1)=10 ! Ch.2 Trace1: 10 dBm
570 Scale2(2)=2 ! Trace2: 2
580 File$="Ex_3_1.sta" ! Save File Name : Ex_3_1.sta
590 !
600 OUTPUT @Agte507x;":SYST:PRES"
610 !
620 OUTPUT @Agte507x;":DISP:SPL D1_1_2"
630 OUTPUT @Agte507x;":INIT1:CONT ON"
640 OUTPUT @Agte507x;":INIT2:CONT ON"
(Lin/Phase)
(Lin/Phase)
(Lin/Phase)
70 Chapter 3

Setting Up the Analyzer
Sample Program
650 !
660 ! Channel 1
670 !
680 OUTPUT @Agte507x;":SENS1:SWE:TYPE SEGM"
690 OUTPUT @Agte507x;":SENS1:SEGM:DATA 5,0,1,1,0,0,";Segm;",";
700 FOR I=1 TO Segm-1
710 OUTPUT @Agte507x;Star1(I);",";Stop1(I);",";Nop1(I);",";If_bw1
(I);",";Pow1(I);",";
720 NEXT I
730 OUTPUT @Agte507x;Star1(Segm);",";Stop1(Segm);",";Nop1(Segm);","
;If_bw1(Segm);",";Pow(Segm)
740 !
750 OUTPUT @Agte507x;":CALC1:PAR:COUN ";Num_of_tr1
760 OUTPUT @Agte507x;":DISP:WIND1:SPL "&Allocate1$
770 FOR I=1 TO Num_of_tr1
780 OUTPUT @Agte507x;":CALC1:PAR"&VAL$(I)&":DEF "&Para1$(I)
790 OUTPUT @Agte507x;":CALC1:PAR"&VAL$(I)&":SEL"
800 OUTPUT @Agte507x;":CALC1:FORM "&Fmt1$(I)
810 SELECT Fmt1$(I)
820 CASE "SLIN","SLOG","SCOM","SMIT","SADM","PLIN","PLOG","POL"
830 OUTPUT @Agte507x;":DISP:WIND1:TRAC"&VAL$(I)&":Y:PDIV ";
Scale1(I)
840 CASE ELSE
850 OUTPUT @Agte507x;":DISP:WIND1:TRAC"&VAL$(I)&":Y:RPOS ";
Ref_pos1(I)
860 OUTPUT @Agte507x;":DISP:WIND1:TRAC"&VAL$(I)&":Y:RLEV ";
Ref_rev1(I)
870 OUTPUT @Agte507x;":DISP:WIND1:TRAC"&VAL$(I)&":Y:PDIV ";
Scale1(I)
880 END SELECT
890 NEXT I
900 !
910 ! Channel 2
920 !
930 OUTPUT @Agte507x;":SENS2:SWE:TYPE LIN"
940 OUTPUT @Agte507x;":SENS2:FREQ:CENT ";Cent2
950 OUTPUT @Agte507x;":SENS2:FREQ:SPAN ";Span2
960 OUTPUT @Agte507x;":SENS2:SWE:POIN ";Nop2
970 OUTPUT @Agte507x;":SENS2:BAND ";If_bw2
980 OUTPUT @Agte507x;":SOUR2:POW ";Pow2
990 !
1000 OUTPUT @Agte507x;":CALC2:PAR:COUN ";Num_of_tr2
1010 OUTPUT @Agte507x;":DISP:WIND2:SPL "&Allocate2$
1020 FOR I=1 TO Num_of_tr2
1030 OUTPUT @Agte507x;":CALC2:PAR"&VAL$(I)&":DEF "&Para2$(I)
1040 OUTPUT @Agte507x;":CALC2:PAR"&VAL$(I)&":SEL"
1050 OUTPUT @Agte507x;":CALC2:FORM "&Fmt2$(I)
1060 SELECT Fmt2$(I)
1070 CASE "SLIN","SLOG","SCOM","SMIT","SADM","PLIN","PLOG","POL"
1080 OUTPUT @Agte507x;":DISP:WIND2:TRAC"&VAL$(I)&":Y:PDIV ";
Scale2(I)
1090 CASE ELSE
1100 OUTPUT @Agte507x;":DISP:WIND2:TRAC"&VAL$(I)&":Y:RPOS ";
Ref_pos2(I)
1110 OUTPUT @Agte507x;":DISP:WIND2:TRAC"&VAL$(I)&":Y:RLEV ";
Ref_rev2(I)
1120 OUTPUT @Agte507x;":DISP:WIND2:TRAC"&VAL$(I)&":Y:PDIV ";
Scale2(I)
1130 END SELECT
1140 NEXT I
1150 !
1160 OUTPUT @Agte507x;":MMEM:STOR """&File$&""""
1170 END
3. Setting Up the Analyzer
Chapter 3 71

Setting Up the Analyzer
Sample Program
72 Chapter 3

4 Performing Calibration
This chapter explains how to obtain calibration coefficients and perform error correction as
well as how to define the calibration kit required to obtain the calibration coefficients. It
also shows how to perform power calibration.
4. Performing Calibration
73

Performing Calibration
Calibration
Calibration
You need to execu te calibratio n to eliminate error elements related to measurement, thus
allowing you to perform accurate measurement.
Performing calibration (obtaining calibration coefficients)
Selecting a Calibration Kit
To select a calibration kit, use the following command:
• :SENS{1-16}:CORR:COLL:CKIT on page 560
Selecting a Calibration Type
The calibration coefficients are calculated based on the selected calibration type.
Therefore, before you can calculate the calibration coefficients, you must select the
appropriate calibration type by using one of the following commands.
Calibration type Command
Response OPEN :SENS{1-16}:CORR:COLL:METH:OPEN on page 603
SHORT :SENS{1-16}:CORR:COLL:METH:SHOR on page 603
THRU :SENS{1-16}:CORR:COLL:METH:THRU on page 606
Enhanced Response :SENS{1-16}:CORR:COLL:METH:ERES on page 602
1-Port :SENS{1-16}:CORR:COLL:METH:SOLT1 on page 604
Full 2-Port :SENS{1-16}:CORR:COLL:METH:SOLT2 on page 604
Full 3-Port :SENS{1-16}:CORR:COLL:METH:SOLT3 on page 605
Full 4-Port :SENS{1-16}:CORR:COLL:METH:SOLT4 on page 605
2-Port TRL :SENS{1-16}:CORR:COLL:METH:TRL2 on page 607
3-Port TRL :SENS{1-16}:CORR:COLL:METH:TRL3 on page 608
4-Port TRL :SENS{1-16}:CORR:COLL:METH:TRL4 on page 609
NOTE To calculate the calibration coefficients for the simplified full 3-port and simplified full
4-port calibrations, select the full 3-port and full-4 port commands, respectively. To
calculate the calibration coefficient for the simplified 3-port TRL calibration and the
simplified 4-port TRL calibration, select the 3-port TRL and the 4-port TRL commands,
respectively.
To check the currently selected calibration type, use the following command:
• :SENS{1-16}:CORR:COLL:METH:TYPE? on page 610
74 Chapter 4

Performing Calibration
Calibration
Setting the trigger source for calibration
T o set the trigger source for calibration, use the following command. By setting the trigger
source for calibration to “System,” setting th e trigger source for measurement to
“External,” and turning on the point trigger function, it becomes possible to use
“calibration for each measurement point using the external trigger.”
• :SENS{1-16}:CORR:TRIG:FREE on page 651
NOTE The trigger source for calibration does not function for the calibrations of E-Cal, power,
receiver, and scalar mixer.
Measuring Calibration Data
To measure the calibration data, use one of the following commands:
Calibration data items Command
OPEN :SENS{1-16}:CORR:COLL:OPEN on page 611
SHORT :SENS{1-16}:CORR:COLL:SHOR on page 613
LOAD :SENS{1-16}:CORR:COLL:LOAD on page 600
THRU :SENS{1-16}:CORR:COLL:THRU on page 616
Isolation :SENS{1-16}:CORR:COLL:ISOL on page 599
TRL Thru :SENS{1-16}:CORR:COLL:TRLT on page 619
TRL Reflection :SENS{1-16}:CORR:COLL:TRLR on page 618
TRL Line/Match :SENS{1-16}:CORR:COLL:TRLL on page 617
NOTE You cannot run more than one of the commands listed above at a time; if you issue another
command before the currently running command completes successfully , the current
command will be aborted. Therefore, when you write a program that issues multiple
calibration commands in series, you should use the *OPC? command on page 288 or some
other means to ensure that no command is executed before the preceding command
completes itself.
As shown in Table 4-1, the data required to calculate the calibration coefficients differ
depending on the selected calibration type.
Table 4-1 Calibration Types and Required Data
Calibration type
(Selected ports are
enclosed in parentheses)
Response OPEN (a) a Not required [a] Not required Not required
SHORT (a) Not required a [a] Not required Not required
THRU (a-b) Not required Not required Not required a-b [a-b]
Enhanced Response (a-b) b b b a-b [a-b]
1-Port (a) a a a Not required Not required
Full 2-Port (a-b) a, b a, b a, b a-b, b-a [a-b], [b-a]
Data
OPEN SHORT LOAD THRU Isolation
4. Performing Calibration
Chapter 4 75

Performing Calibration
Calibration
Table 4-1 Calibration Types and Required Data
Calibration type
(Selected ports are
enclosed in parentheses)
Full 3-Port (a-b-c) a, b, c a, b, c a, b, c a-b, b-a
Simplified Full 3-Port
(1-2-3) 1, 2, 3 1, 2, 3 1, 2, 3 1-2, 2-1
(1-2-4) 1, 2, 4 1, 2, 4 1, 2, 4 1-2, 2-1
(1-3-4) 1, 3, 4 1, 3, 4 1, 3, 4 1-3, 3-1
(2-3-4) 2, 3, 4 2, 3, 4 2, 3, 4 2-3, 3-2
Full 4-Port 1, 2, 3, 4 1, 2, 3, 4 1, 2, 3, 4 1-2, 2-1
Simplified Full 4-Port 1, 2, 3, 4 1, 2, 3, 4 1, 2, 3, 4 1-2, 2-1
Data
OPEN SHORT LOAD THRU Isolation
a-c, c-a
b-c, c-b
1-3, 3-1
[2-3], [3-2]
1-4, 4-1
[2-4], [4-2]
[1-4], [4-1]
3-4, 4-3
[2-4], [4-2]
3-4, 4-3
1-3, 3-1
1-4, 4-1
2-3, 3-2
2-4, 4-2
3-4, 4-3
1-3, 3-1
[1-4], [4-1]
[2-3], [3-2]
[2-4], [4-2]
3-4, 4-3
[a-b], [b-a]
[a-c], [c-a]
[b-c], [c-b]
[1-2], [2-1]
[1-3], [3-1]
[2-3], [3-2]
[1-2], [2-1]
[1-4], [4-1]
[2-4], [4-2]
[1-3], [3-1]
[1-4], [4-1]
[3-4], [4-3]
[2-3], [3-2]
[2-4], [4-2]
[3-4], [4-3]
[1-2], [2-1]
[1-3], [3-1]
[1-4], [4-1]
[2-3], [3-2]
[2-4], [4-2]
[3-4], [4-3]
[1-2], [2-1]
[1-3], [3-1]
[1-4], [4-1]
[2-3], [3-2]
[2-4], [4-2]
[3-4], [4-3]
In the data section in the table, the letter m (for example, 1, a) represents the measurement
data at port m; m-n (for example, 1-2, a-b) represents the measurement data between
response port m and stimulus port n. You can omit data enclosed in brackets.
76 Chapter 4
Performing Calibration
Calibration
Calculating Calibration Coefficients
To calculate the calibration coefficients, use one of the following commands:
Calibration type Command
Response, 1/2/3/4 port :SENS{1-16}:CORR:COLL:SAVE on page 613
Simplified full 3/4 port
Simplified 3/4-port TRL
:SENS{1-16}:CORR:COLL:SIMP:SAVE on page 614
Before issuing the above commands, you must measure all required calibration data items
according to your selected calibration type (see T able 4-1).Calculating the calibration
coefficients clears all calibration data regardless of whether they are used for the
calculation. The calibration type selection is also cleared, which results in a state where no
calibration type is selected.
Simplified full 3-/4-port calibration
NOTE This function is available with firmware version 3.50 or greater. Note that you can execute
this function from the front panel only for firmware version A.06.50 or greater.
The simplified full 3-/4-port calibration acquires the calibration coefficients while omitting
a part of the thru measurement.
NOTE Notes on the simplified full 3-/4-port calibration
Compared to the normal full 3-/4-port calibration, the simplified full 3-/4-port calibration
is more sensitive to the error that may arise when acquiring calibration data. This because
the calibration coefficients are calculated without a part of the thru measurement data.
Therefore, the following should be considered when measuring data for the simplified full
3-/4-port calibration.
R The standard used for measurement must match its definition value.
• Use a standard that provides good repeatability (stability).
• Do not omit the length of the thru when defining the standard.
• When using a user-created standard, verify the definition value.
• For the N connector, remember that it has two different types: male and female.
R Assure high reliability and repeatability for measurement.
• Reduce the difference in external environment (such as temperature difference)
between the time when measuring calibration data and when measuring actual data.
• Set the power level of the stimulus signal sufficiently small so that compression
does not occur.
• Narrow the IF bandwidth.
• Increase the averaging factor.
• Use a cable that has robust amplitude/phase characteristics against bending.
• Use high-precision connectors.
4. Performing Calibration
Chapter 4 77

Performing Calibration
Calibration
Simplified 3/4-port TRL calibration
NOTE This function is available with firmware version A.06.50 or greater.
The simplified 3/4-port TRL calibration calculates the calibration coefficient by skipping
part of the thru/line measurement (or line/match measurement) that is necessary for normal
3/4-port TRL calibration.
NOTE You need to gi ve consideration to the same conditions for the simplified 3/4-port TRL
calibration as those for the simplified full 3/4-port calibration listed above.
Turning ON/OFF Error Correction
To turn ON/OFF error correction, use the following command:
• :SENS{1-16}:CORR:STAT on page 650
Also, once you have calculated the calibration coefficient using the
:SENS{1-16}:CORR:COLL:SAVE or :SENS{1-16}:CORR:COLL:SIMP:SAVE
command, error correction is automatically turned on.
78 Chapter 4

Performing Calibration
Calibration
Using ECal
An ECal (Electronic Calibration) module allows you to perform 1-/2-/3-/4-port calibration
and response (THRU) calibration without having to replace the standard device.
ECal works by using the calibration kit data contained in the ECal module instead of the
calibration kit data selected for the E5070B/E5071B. This means that you do not have to
define or select a calibration kit when using ECal.
NOTE When two or more ECal modules are connected through the USB port, the system uses the
calibration kit data of the first ECal module.
To perform ECal, use one of the following commands:
Calibration type Command
1-Port Calibration :SENS{1-16}:CORR:COLL:ECAL:SOLT1 on page 594
Full 2-Port Calibration :SENS{1-16}:CORR:COLL:ECAL:SOLT2 on page 594
Full 3-Port Calibration :SENS{1-16}:CORR:COLL:ECAL:SOLT3 on page 595
Full 4-Port Calibration :SENS{1-16}:CORR:COLL:ECAL:SOLT4 on page 595
Enhanced Response Calibration :SENS{1-16}:CORR:COLL:ECAL:ERES on page 592
Response Calibration (THRU) :SENS{1-16}:CORR:COLL:ECAL:THRU on page 596
Simply issuing one of the above commands completes all of the tasks necessary for error
correction, including measuring the calibration data, calculating the calibration
coefficients, and running the error correction feature.
NOTE Once you have initiated ECal, you cannot cancel the operation.
No command entered following the initiation of ECal will be processed until ECal
completes successfully. Accordingly, if you issue a command that queries some data, the
system will not respond to the query until ECal is complete.
You can control wh ether to perform isol at ion measurement during ECal. To turn ON/OFF
isolation measurement, use the following command:
• :SENS{1-16}:CORR:COLL:ECAL:ISOL on page 593
You can control whether to perform unk nown thru calibration during ECal. To turn
ON/OFF unknown thru calibration, use the following command:
• :SENS{1-16}:CORR:COLL:ECAL:UTHR on page 598
NOTE If the ECal module does not support isolation measurement, the system will not perform it.
To select the ECal characteristic for a user-characterized ECal, use the following
command:
• :SENS{1-16}:CORR:COLL:ECAL:UCH on page 597
4. Performing Calibration
Chapter 4 79

Performing Calibration
Calibration
ECal Auto-detect Function
The ECal module can automatically detect which port of the ECal module is connected to
the E5070B/E5071B test port. Turn off the auto-detect function to specify a port manually.
To turn OFF the auto-detect function, use the following command.
• :SENS:CORR:COLL:ECAL:ORI on page 535
To turn OFF the auto-detect function and set a port manually, use the following command.
• :SENS:CORR:COLL:ECAL:PATH on page 536
Checking the Applied Calibration Type
When you turn on error correction, you can check the calibration type actually applied to
each trace. To check the calibration type, use the following command:
• :SENS{1-16}:CORR:TYPE{1-16}? on page 652
NOTE The above command reads out the same parameter (SOLT3) for both the full 3-port and
simplified full 3-port calibrations, and thus they cannot be discriminated. For the same
reason, the following calibrations cannot be discriminated: fu ll 4-port and simplified full
4-port, 3-port TRL and simplified 3-port TRL, and 4-port TRL and simplified 4-port TRL.
80 Chapter 4

Performing Calibration
Calibration
Defining calibration kits
Selecting a Calibration Kit
To select a calibration kit, use the following command:
• :SENS{1-16}:CORR:COLL:CKIT on page 560
Setting the Calibration Kit Name
To set the name of a calibration kit, use the following command:
• :SENS{1-16}:CORR:COLL:CKIT:LAB on page 561
Standard definitions
Selecting a Standard Type
To select a standard type, use the following command:
• :SENS{1-16}:CORR:COLL:CKIT:STAN{1-21}:TYPE on page 586
Setting the Standard Name To set the standard name, use the following command:
• :SENS{1-16}:CORR:COLL:CKIT:STAN{1-21}:LAB on page 584
Setting the S tandard Value To set the standard value, use one of the following
commands:
Item Command
C0 :SENS{1-16}:CORR:COLL:CKIT:STAN{1-21}:C0 on page 572
C1 :SENS{1-16}:CORR:COLL:CKIT:STAN{1-21}:C1 on page 573
C2 :SENS{1-16}:CORR:COLL:CKIT:STAN{1-21}:C2 on page 574
C3 :SENS{1-16}:CORR:COLL:CKIT:STAN{1-21}:C3 on page 575
L0 :SENS{1-16}:CORR:COLL:CKIT:ST AN{1-21}:L0 on page 580
L1 :SENS{1-16}:CORR:COLL:CKIT:ST AN{1-21}:L1 on page 581
L2 :SENS{1-16}:CORR:COLL:CKIT:ST AN{1-21}:L2 on page 582
L3 :SENS{1-16}:CORR:COLL:CKIT:ST AN{1-21}:L3 on page 583
Offset Delay :SENS{1-16}:CORR:COLL:CKIT:STAN{1-21}:DEL on page 577
Offset Loss :SENS{1-16}:CORR:COLL:CKIT:STAN{1-21}:LOSS on page 585
Offset Z0 :SENS{1-16}:CORR:COLL:CKIT:STAN{1-21}:Z0 on page 587
Arbitrary Impedance :SENS{1-16}:CORR:COLL:CKIT:STAN{1-21}:ARB on page 571
4. Performing Calibration
Start Frequency :SENS{1-16}:CORR:COLL:CKIT:STAN{1-21}:FMIN on page 579
Stop Frequency :SENS{1-16}:CORR:COLL:CKIT:STAN{1-21}:FMAX on page 578
Media Type :SENS{1-16}:CORR:COLL:CKIT:STAN{1-21}:CHAR on page 576
Chapter 4 81

Performing Calibration
Calibration
As shown in Table 4-2, you need to set different items depending on the standard type.
Table 4-2 Settings Specific to Each Standard Type
Standard
Types
OPEN √√√√ √√√
SHORT √√ √ √ √ √ √
LOAD √√√ √ √ √
THRU √√√ √ √ √
Arbitrary
Impedance
C
0
to
C
3
L0
Delay
to
L3
√√√√ √ √ √
Offset
Offse
t
Loss
Offse
t Z0
Arbitrar
y
Impedan
ce
Min.
Frequenc
y
Max.
Frequen
cy
Connec
tor
Type
You need to set the items identified by √ marks in the table above.
Saving/Recalling the Definition File
To save the definition of the selected calibration kit to a file, use the following command.
• :MMEM:STOR:CKIT{1-20} on page 510
To recall the definition of the calibration kit from a file and set, use the following
command.
• :MMEM:LOAD:CKIT{1-20} on page 499
Defining a Subclass of the Standard
To set the standard type that varies with the frequency range, use the following command
to specify the subclass.
• :SENS{1-16}:CORR:COLL:SUBC on page 615
To select the subclass, use the following command.
• :SENS{1-16}:CORR:COLL:CKIT:ORD on page 562
To set the start frequency of a specified subclass, use the following command.
• :SENS{1-16}:CORR:COLL:CKIT:STAN{1-21}:FMIN on page 579
To set the stop frequency of a specified subclass, use the following command.
• :SENS{1-16}:CORR:COLL:CKIT:STAN{1-21}:FMAX on page 578
Defining a Standard Class Assignment
To select the standard to be applied to the OPEN measurement for each port, use the
following command:
• :SENS{1-16}:CORR:COLL:CKIT:ORD:OPEN on page 564
To select the standard to be applied to the SHORT measurement for each port, use the
following command:
82 Chapter 4

Performing Calibration
Calibration
• :SENS{1-16}:CORR:COLL:CKIT:ORD:SHOR on page 565
To select the standard to be applied to the LOAD measurement for each port, use the
following command:
• :SENS{1-16}:CORR:COLL:CKIT:ORD:LOAD on page 563
T o select the standard to be applied to the THRU measurement between each pair of ports,
use the following command:
• :SENS{1-16}:CORR:COLL:CKIT:ORD:THRU on page 566
To select the standard to be applied to the THRU measurement for the TRL calibration
between each pair of ports, use the following command.
• :SENS{1-16}:CORR:COLL:CKIT:ORD:TRLT on page 569
T o select the standard to be applied to the Reflection measurement for the TRL calibration
between each pair of ports, use the following command.
• :SENS{1-16}:CORR:COLL:CKIT:ORD:TRLR on page 568
T o select the standard to be applied to the Line/Match measurement for the TRL calibration
between each pair of ports, use the following command.
• :SENS{1-16}:CORR:COLL:CKIT:ORD:TRLL on page 567
Setting the Standard Media Type
To select the media type of the standard to be used, use the following command.
• :SENS{1-16}:CORR:COLL:CKIT:STAN{1-21}:CHAR on page 576
4. Performing Calibration
Chapter 4 83

Performing Calibration
Calibration
Saving and loading calibration coefficients
You can save calibration coefficients to a file along with other instrument settings and then
later load them from the file.
By default, the system does not save calibration coefficients when it saves instrument
settings. Therefore, to save calibration coefficients, you must explicitly configure the
system to save them by issuing the following command:
• on page 525
To save calibration coefficients to a file, use the following command:
• :MMEM:STOR on page 506
To load calibration coefficients from a file, use the following command:
• :MMEM:LOAD on page 495
For more information on how to save and load calibration coefficients, refer to “Saving and
recalling instrument status.”
Reading/Writing Calibration Coefficient Only
The calibration coefficient alone can be read from and written to the E5070B/E5071B by
using the following command:
• :SENS{1-16}:CORR:COEF on page 548
To write a positive calibration coefficient, use one of the following commands to declare
the calibration type:
• :SENS{1-16}:CORR:COEF:METH:ERES on page 550
• :SENS{1-16}:CORR:COEF:METH:OPEN on page 551
• :SENS{1-16}:CORR:COEF:METH:SHOR on page 552
• :SENS{1-16}:CORR:COEF:METH:SOLT1 on page 553
• :SENS{1-16}:CORR:COEF:METH:SOLT2 on page 554
• :SENS{1-16}:CORR:COEF:METH:SOLT3 on page 555
• :SENS{1-16}:CORR:COEF:METH:SOLT4 on page 556
• :SENS{1-16}:CORR:COEF:METH:THRU on page 557
To validate the written calibration coefficient, use the following command:
• :SENS{1-16}:CORR:COEF:SAVE on page 558
84 Chapter 4

About Calibration Types and Coefficients
The following table shows the required calibration coefficients for each calibration type.
Table 4-3 Calibration Type and Valid Calibration Coefficient
Calibration Type Calibration Coefficient
ES ER ED EL ET EX
Response calibration (OPEN) * *
Response calibration (SHORT) * *
Response calibration (THRU) * *
Enhanced response calibration * * * * *
1-port calibration * * *
Full 2-port calibration ******
Full 3-port calibration ******
Performing Calibration
Calibration
Full 4-port calibration ******
2-Port TRL calibration *****
3-Port TRL calibration *****
4-Port TRL calibration *****
NOTE If either an invalid calibration coefficient is specified for the writing command or a
nonexistent calibration coefficient is specified for its reading command, the following error
will occur:
23, Specified error term does not exist
Procedures for Writing Calibration Coefficient
You must follow the steps below to write the calibration coefficient.
1. Declare the calibration type to write.
Execute :SENS{1-16}:CORR:COEF:METH:xxxx command
2. Write any calibration coefficient.
Execute :SENS{1-16}:CORR:COEFcommand as needed for the written calibration
coefficients
3. Validate the calibration coefficients.
4. Performing Calibration
Execute :SENS{1-16}:CORR:COEF:SAVE command
NOTE Do not execute any other command while writing the calibration coefficients.This may
cause the system to function incorrectly.
If the fixture simulator is turned on, the calibration coefficient writing will not function
correctly. Make sure to turn off the fixture simulator before execution.
Chapter 4 85

Performing Calibration
Calibration
Clearing calibration data and calibration coefficients
Clearing Calibration Data
You can use the following command to clear the measurement values of calibration data
executed with :SENS{1-16}:CORR:OFFS:COLL:OPEN on page 641 command, etc.
when the frequency offset function has been enabled.
• :SENS{1-16}:CORR:OFFS:COLL:CLE on page 635
By implementing the measurement of calibration data, the temporarily changed settings are
recovered to the original state, including trace number and measurement parameters.
Clearing Calibration Coefficients
You can use the following command to clear the calibration coefficients used when the
frequency offset function is enabled.
• :SENS{1-16}:CORR:OFFS:CLE on page 634
This command does not clear calibration coefficients related to normal calibration.
86 Chapter 4
Performing Calibration
Power Calibration
Power Calibration
The E5070B/E5071B lets you perform power calibration by using a power meter to output
a more accurate power level.
Preparation for power calibration
Connecting Power Meter and Power Sensor
The E5070B/E5071B performs power calibration by controlling the power meter via
GPIB. Therefore, you need to connect the E5070B/E5071B and the power meter by using
the USB/GPIB interface. For details on this as well as information on available power
meters and power sensors, refer to the User's Guide.
Setting GPIB Address of Power Meter
Use the following command to set the GPIB address of the power meter to the
E5070B/E5071B.
• :SYST:COMM:GPIB:PMET:ADDR on page 782
Setting Power Sensor Calibration Factor Table
Before performing power calibration, set the reference calibration factor (the calibration
factor at 50 MHz) and the calibration factor for each frequency depending on the power
sensor you use.
NOTE Depending on the combination of power meter and power sensor that you use, the power
sensor calibration factor table may be set automatically by the power meter. In this case, do
not set the calibration factor table with the E5070B/E5071B. For details, refer to the User's
Guide.
To set the reference calibration factor of the power sensor, use the following commands:
Channel A :SOUR:POW:PORT:CORR:COLL:ASEN:RCF on page 700
Channel B :SOUR:POW:PORT:CORR:COLL:BSEN:RCF on page 701
T o set the calibration factor table of the power sensor for each frequency, use the following
commands:
Channel A :SOUR:POW:PORT:CORR:COLL:TABL:ASEN:DATA on page 702
Channel B :SOUR:POW:PORT:CORR:COLL:TABL:BSEN:DATA on page 703
4. Performing Calibration
Chapter 4 87

Performing Calibration
Power Calibration
Alternatively , you can configure the power sensor calibration factor table based on the data
contained in a CSV file by issuing the following commands:
Channel A :MMEM:LOAD:ASCF on page 496
Channel B :MMEM:LOAD:BSCF on page 497
Also, you can save the contents of the current power sensor calibration factor table to a file
by issuing the following commands:
Channel A :MMEM:STOR:ASCF on page 507
Channel B :MMEM:STOR:BSCF on page 508
For more information on saving/recalling the power sensor calibration factor table, refer to
“Saving/recalling Power Sensor Calibration Factor Table” on page 197.
Loss compensation
You can perform loss comp ensatio n by setting in advance the power loss due to the
difference in connections (cables, adapters, etc.) between the when the power calibration
data are measured and when the actual DUTs are measured.
Setting Loss Compensation Table
To set the loss compensation table for each frequency, use the following command:
• :SOUR{1-16}:POW:PORT{1-4}:CORR:COLL:TABL:LOSS:DATA on page 715
Alternatively, you can configure the loss compensation table based on the data contained in
a CSV file by issuing the following command:
• :MMEM:LOAD:PLOS{1-4} on page 501
Also, you can save the contents of the current loss compensation table to a file by issuing
the following command:
• :MMEM:STOR:PLOS{1-4} on page 514
Turning ON/OFF Loss Compensation
To turn on or off the loss compensation, use the following command:
• :SOUR{1-16}:POW:PORT{1-4}:CORR:COLL:TABL:LOSS on page 714
88 Chapter 4

Performing Calibration
Power Calibration
Measuring power calibration data
NOTE Before measuring power calibration data, you need to execute zero adjustment and
calibration of the power sensor. For information on how to perform these procedures, refer
to the operation manual of the power meter you are using.
When using the power sensor calibration factor table of the E5070B/E5071B, set the
reference calibration factor of the power meter to 100% when calibrating the power sensor.
To set the number of power calibration data measurements at one measurement point
(averaging factor), use the following command:
• :SOUR{1-16}:POW:PORT{1-4}:CORR:COLL:AVER on page 712
To set a tolerance for power calibration, use the following command:
• :SOUR{1-16}:POW:PORT{1-4}:CORR:COLL:NTOL on page 713
NOTE When a tolerance for power calibration is set, if the measured value does not fall within the
tolerance, even after measurement is performed during power calibration the number of
times specified by the averaging factor, an error message is displayed and the power
calibration is aborted. In this case, the power correction is not turned on.
To measure the power calibration data, use the following command. When the
measurement is complete, the power calibration is automatically turned on.
• :SOUR{1-16}:POW:PORT{1-4}:CORR:COLL on page 711
NOTE If you issue another command during the measurement of the power calibration data by the
above command, the measurement may be aborted. Therefore, when you write a program
that issues multiple calibration commands in series, you should use the *OPC? command
on page 288 or some other means to ensure that no command is executed before the
preceding command completes itself.
Turning ON/OFF power-level error correction
To turn on or off the power-level error correction, use the following command:
• :SOUR{1-16}:POW:PORT{1-4}:CORR on page 711
NOTE When the power calibration data measurement initiated with the
:SOUR{1-16}:POW:PORT{1-4}:CORR:COLL command is complete, the power
calibration is automatically turned on.
Reading/writing power calibration data array
The power calibration data array contains data used to perform error correction for the
power level at each measurement point (values obtained by subtracting the value actually
measured with the power meter from the set power level value when measuring power
calibration data at each measurement point).
4. Performing Calibration
The number of power calibration data arrays that are assigned to individual ports of
individual channels can be up to 64 (16×4). To read/write one of the power calibration data
arrays, use the following command:
Chapter 4 89

Performing Calibration
Power Calibration
• :SOUR{1-16}:POW:PORT{1-4}:CORR:DATA on page 716
90 Chapter 4

Performing Calibration
Receiver Calibration
Receiver Calibration
The E5070B/E5071B has a receiver calibration capability to calibrate the gain for each
receiver in an absolute measurement.
Measurement of receiver calibration data and calculation of calibration coefficient
NOTE Before starting a measurement of receiver calibration data, you must connect a THRU
between the source port at which power calibration was applied and the receiver port on
which you want to implement receiver calibration.
Use the following command for the measurement of receiver calibration data and
calculation of calibration coefficient. The value following REC signifies a receiver port
number, and the value given as an argument is a source port number. Specifying the same
port to both the receiver port and source port will cause an error.
• :SENS{1-16}:CORR:REC{1-4}:COLL:ACQ on page 648
Once the measurement is completed, calculation of the calibration coefficient takes place
automatically, turning on receiver error correction automatically.
NOTE The power calibration information on both the receiver port and source port is used to
calculate calibration coefficients. The accuracy of receiver calibration will increase if
power calibration is implemented for both the receiver port and the source port before
starting receiver calibration. For information on power calibration, refer to “Power
Calibration” on page 87.
NOTE Verify the frequency of each port before starting a frequency offset sweep. Since this
command does not change the frequency setting, you cannot expect a correct measurement
result unless the frequency is the same for both the receiver port and the source port.
When using power calibration in combination with receiver calibration, you must
implement it so that it sufficiently covers the frequencies of both ports or implement it
twice, before and after the receiver calibration.
Turning ON/OFF receiver error correction
To turn on or off the receiver error correction, use the following command:
• :SENS{1-16}:CORR:REC{1-4} on page 647
NOTE Once the measurement of receiver calibration data is completed with the
:SENS{1-16}:CORR:REC{1-4}:COLL:ACQ command, receiver error correction is
automatically turned on.
4. Performing Calibration
Chapter 4 91

Performing Calibration
Scalar-Mixer Calibration
Scalar-Mixer Calibration
The E5070B/E5071B’s frequency offset function allows you to measure any device that
has different input and output frequencies. To correct such measurements, you must
determine the transmission frequency characteristics at different frequencies.
Scalar-mixer calibration is a method to calculate the transmission frequency characteristics
at different frequencies by using a power meter.
Measurement of scalar-mixer calibration data
Setting Frequency Offset Function
You can use the following command to enable the frequency offset function before starting
a measurement of scalar-mixer calibration data.
• :SENS{1-16}:OFFS on page 668
NOTE To use scalar-mixer calibration, the frequency offset function must be enabled.
Selecting Calibration Port and Type
You can use the following comman ds to set the port on whic h a measurem ent of
scalar-mixer calibration data is implemented and the type of calibration.
• :SENS{1-16}:CORR:OFFS:COLL:METH:SMIX2 on page 639
• :SENS{1-16}:CORR:OFFS:COLL:METH:SOLT1 on page 640
“SMIX2” will set a scalar-mixer calibration for 2-port forward, revers e and both directions.
“SOLT1” will set 1-port calibration.
NOTE The two ports specified by “SMIX2” must be different from each other.
The setting of forward, reverse and both directions is not dependent on the order of the two
specified ports but determined by specifying an appropriate command for calibration data
measurement, such as :SENS{1-16}:CORR:OFFS:COLL:OPEN on page 641.
Measuring the Calibration Data
You can use the following command to measure the scalar-mixer calibration data.
• :SENS{1-16}:CORR:OFFS:COLL:OPEN on page 641
• :SENS{1-16}:CORR:OFFS:COLL:SHOR on page 644
• :SENS{1-16}:CORR:OFFS:COLL:LOAD on page 638
• :SENS{1-16}:CORR:OFFS:COLL:THRU on page 645
92 Chapter 4

Performing Calibration
Scalar-Mixer Calibration
Measuring Power
You can use the following command to measure power.
• :SENS{1-16}:CORR:OFFS:COLL:PMET on page 642
NOTE Power measurement is required for scalar-mixer calibration, but it is not required for 1-port
calibration. The setting for power measurement is the same as for the normal power
calibration. For information on power calibration, refer to “Power Calibration” on page 87.
Calculation of scalar-mixer calibration coefficient
If the needed measurement is completed for the calibration port and type you have
selected, use the following command to start calculation of calibration coefficients.
• :SENS{1-16}:CORR:OFFS:COLL:SAVE on page 643
NOTE If the necessary measurement is not completed, an error will occur. Once the calculation of
calibration coefficients is completed, the measurement values are cleared despite whether
they were used and error correction is turned on automatically.
Turning ON/OFF scalar-mixer error correction
T o turn on or of f scalar -mixer error correction, use the following command. This command
is commonly used for the normal calibration; scalar-mixer calibration data are enabled
while the frequency offset is turned on, and the normal calibration data are enabled while it
is turned off.
• :SENS{1-16}:CORR:STAT on page 650
NOTE Once the scalar-mixer calibration coefficient has been calculated, scalar-mixer correction is
automatically turned on.
Implementing scalar-mixer calibration with ECal
An ECal (Electronic Calibration) module allows you to perform scalar-mixer calibration
and 1-port calibration without needing to replace the standard device.
To perform ECal, use one of the following commands:
Calibration type Command
1-Port Calibration :SENS{1-16}:CORR:OFFS:COLL:ECAL:SOLT1 on page637
Scalar-Mixer Calibration :SENS{1-16}:CORR:OFFS:COLL:ECAL:SMIX2 on page636
Simply issuing one of the above commands completes some of the tasks necessary for error
correction, including measuring the calibration data, calculating the calibration
coefficients, and running the error correction feature. To implement scalar-mixer
calibration, you must measure the power in advance. For 1-port calibration, you do not
need to do this.
4. Performing Calibration
Chapter 4 93

Performing Calibration
Scalar-Mixer Calibration
NOTE Once ECal has started, you cannot interrupt the operation.
Any command received after ECal has started will not be executed until ECal is completed.
In other words, even if you issue a command with a Query, you cannot get the Query
response until ECal is finished.
94 Chapter 4

Performing Calibration
Partial overwrite
Partial overwrite
The E5070B/E5071B has the following calibration coefficients for full N-port calibration:
Er, Es, Ed (reflection), Et (transmission), and Ex (isolation).The partial overwrite function
is used to measure some of these calibration coefficients after completion of the initial
calibration and then to overwrite them.
The conditions under which the calibration coefficients can be calculated by the partial
overwrite are as follows:
• Calibration is completed once and valid (status other than C? or C!)
• One or more measurements for re-calculation are performed.
NOTE The isolation calibration coefficient, Ex, cannot be returned to th e initial value, 0, once it is
calculated.
If calculation of the calibration coefficients is attempted without the measurements
required to execute the partial overwrite, an error message (20: Additional Standard
Needed) is displayed.
Executing calculation of calibration coefficients using partial overwrite
To calculate the calibration coefficients using partial overwrite, use the following
command:
• :SENS{1-16}:CORR:COLL:PART:SAVE on page 612
NOTE Before you can calculate the calibration coefficients with the partial overwrite, you must
select the appropriate calibration type in the same way used for normal calibration. If
calculation of the calibration coefficients is attempted without selecting the calibration
type, an error message (28: Invalid Calibration Method) is displayed.
4. Performing Calibration
Chapter 4 95

Performing Calibration
Sample Program
Sample Program
Calibration
Example 4-1 shows a sample program that demonstrates how to calibrate the instrument.
You can find the source file of this program, named cal.htb, on the sample program disk.
The sample program performs calibration with the specified calibration type and saves the
results to a file named “Ex_4_1.sta.”
The program is described in detail below:
Line 40 Assigns a GPIB address to the I/O pass.
Line 50 Stores the name of the file (Ex_4_1.sta) into the File$ variable.
Line 60 Stores the channel number (1) into the Ch$ variable.
Line 80 Calls a subprogram named Select_cal_kit to select the calibration kit.
Line 110 Allows the user to return to the entry start line and re-enter the data if
an error (such as an invalid entry) occurs while selecting the
calibration type number.
Lines 130 to 230 These lines display the list of supported calibration types and prompt
the user to choose one of the items by typing in the appropriate
number.
Line 240 Converts the entered value into an integer and stores it into the
Cal_type variable.
Line 250 Returns to the entry start line if an invalid value is contained in
Cal_type.
Lines 280 to 500 These lines call a subprogram named Select_po rt to select the
appropriate port based on the value of Cal_type and then perform
calibration.
Lines 300 to 310: If Cal_type = 1, the program calls a subprogram
named Cal_resp to perform response calibration (OPEN) after
selecting the port.
Lines 330 to 340: If Cal_type = 2, the program calls the
subprogram Cal_resp to perform response calibration (SHORT)
after selecting the port.
Lines 360 to 370: If Cal_type = 3, the program calls a subprogram
named Cal_resp_thru to perform response calibration (THRU)
after selecting the port.
Lines 390 to 400: If Cal_type = 4, the program calls a subprogram
named Cal_solt to perform 1-port calibration after selecting the
port.
Lines 420 to 430: If Cal_type = 5, the program calls the
subprogram Cal_solt to perform full 2-port calibration after
selecting the port.
Lines 450 to 460: If Cal_type = 6, the program calls the
96 Chapter 4

Performing Calibration
Sample Program
subprogram Cal_solt to perform full 3-port calibration after
selecting the port.
Lines 480 to 490: If Cal_type = 7, the program calls the
subprogram Cal_solt to perform full 4-port calibration after
selecting the port.
Lines 520 to 530 These lines configure the system to save calibration coefficients along
with instrument settings and then save the instrument settings under
the file name contained in the File$ variable.
The Select_cal_kit subprogram in lines 580 to 820, which selects the calibration kit, is
described below.
Lines 630 to 670 These lines retrieve the names of all the calibration kits and store them
into the Cal_kit_lbl$(*) variable.
Line 680 Allows the user to return to the entry start line and re-enter the data if
an error (such as an invalid entry) occurs while entering the number
that identifies the calibration kit.
Lines 700 to 760 These lines display the list of supported calibration kits and prompt the
user to choose one of the items by typing in the appropriate number.
Line 770 Converts the entered value into an integer and stores it into the Cal_kit
variable.
Line 780 Returns to the entry start line if an invalid value is contained in
Cal_kit.
Line 810 Selects the calibration kit that matches the number contained in the
Cal_kit variable.
The Select_port subprogram in lines 860 to 1090, which allows the user to select a port, is
described below.
Lines 910 to 940 If the value of Num_of_ports is 4 (4-port), the subprogram determines
the port numbers (1, 2, 3, 4) without prompting the user to enter port
numbers and then stores the port numbers into the Port(*) variable.
Lines 960 to 1090 If the value of Num_of_ports is not 4, the subprogram prompts the
user to select the number of ports indicated by Num_of_ports.
Line 970: Allows the user to return to the entry start line and
re-enter the data if an error (such as an invalid entry) occurs while
entering the port number.
Lines 990 to 1010: These lines print the index of the current port
and prompt the user to enter the port number.
Lines 1020: Converts the entered value into an integer and stores it
into the Port(*) variable.
4. Performing Calibration
Lines 1040 to 1060: These lines return to the entry start line if the
port number is beyond the range of 1 to 4 or conflicts with an
already selected number.
Chapter 4 97

Performing Calibration
Sample Program
The Cal_resp subprogram in lines 1150 to 1260, which performs response calibration
(OPEN/SHORT), is described below.
Line 1180 Displays the calibration type.
Line 1190 Configures the instrument to perform response calibration (Type$) on
the port identified by the Port variable.
Lines 1200 to 1210 These lines prompt the user to connect a Type$ to port Port, and wait
for a press of the [Enter] key after the connection.
Lines 1220 to 1240 These lines execute the calibration data measurement command
identified by Type$ on port Port and wait until the measurement
completes successfully.
Line 1250 Calculates the calibration coefficients and turns on error correction.
Line 1260 Displays a closing message.
The Cal_resp_thru subprogram in lines 1310 to 1430, which performs response calibration
(THRU), is described below.
Line 1340 Displays the calibration type.
Line 1350 Configures the instrument to perform response calibration (THRU) on
response port Port 1 and stimulus port Port 2.
Lines 1360 to 1370 These lines prompt the user to connect a THRU standard between the
ports identified by Port 1 and Port 2 and wait for a press of the [Enter]
key after the connection.
Lines 1380 to 1400 These lines execute the THRU calibration data measurement
command on response port Port1 and stimulus port 2 and wait until the
measurement completes successfully.
Line 1410 Calculates the calibration coefficients and turns on error correction.
Line 1420 Displays a closing message.
98 Chapter 4

Performing Calibration
Sample Program
The Cal_solt subprogram in lines 1470 to 2000, which performs full n-port calibration, is
described below.
Line 1510 Displays the calibration type.
Lines 1550 to 1590 These lines configure the instrument to perform full Num_of_ports
port calibration on the ports identified by Port(1) through
Port(Num_of_ports).
Lines 1630 to 1790 These lines make up a loop that iterates while incrementing i from 1 to
Num_of_ports.
Lines 1640 to 1650: Prompt the user to connect an OPEN standard
to port Port(i) and wait for a press of the [Enter] key after the
connection.
Lines 1660 to 1680: Execute the OPEN calibration data
measurement command on port Port(i) and wait until the
measurement completes successfully.
Lines 1690 to 1700: Prompt the user to connect a SHORT standard
to port Port(i) and wait for a press of the [Enter] key after the
connection.
Lines 1710 to 1730: Execute the SHORT calibration data
measurement command on port Port(i) and wait until the
measurement completes successfully.
Lines 1740 to 1750: Prompt the user to connect a LOAD standard
to port Port(i) and wait for a press of the [Enter] key after the
connection.
Lines 1760 to 1780: Execute the LOAD calibration data
measurement command on port Port(i) and wait until the
measurement completes successfully.
Lines 1830 to 1940 These lines make up a loop that iterates while incrementing i from 1 to
Num_of_ports-1 and j from i+1 to Num_of_ports.
Lines 1850 to 1860: Prompt the user to connect a THRU standard
between port Port(i) and port Port(j) and wait for a press of the
[Enter] key after the connection.
Lines 1660 to 1680: Execute the THRU calibration data
measurement command on response port Port(i) and stimulus port
Port(j) and wait until the measurement completes successfully.
Lines 1690 to 1700: Execute the THRU calibration data
measurement command on response port Port(j) and stimulus port
Port(i) and wait until the measurement completes successfully.
Line 1980 Calculates the calibration coefficients and turns on error correction.
4. Performing Calibration
Line 1990 Displays a closing message.
Chapter 4 99

Performing Calibration
Sample Program
Example 4-1 Calibration (cal.htb)
10 DIM File$[20],Ch$[9],Inp_char$[9]
20 INTEGER Cal_kit,Cal_type,Port(1:4)
30 !
40 ASSIGN @Agte507x TO 717
50 File$="Ex_4_1.sta"
60 Ch$="1"
70 !
80 Select_cal_kit(@Agte507x,Ch$)
90 !
100 CLEAR SCREEN
110 ON ERROR GOTO Type_select
120 Type_select: !
130 PRINT "## Calibration Type Selection ##"
140 PRINT " 1: Response (Open)"
150 PRINT " 2: Response (Short)"
160 PRINT " 3: Response (Thru)"
170 PRINT " 4: Full 1 Port"
180 PRINT " 5: Full 2 Port"
190 PRINT " 6: Full 3 Port"
200 PRINT " 7: Full 4 Port"
210 PRINT ""
220 PRINT "Input 1 to 7"
230 INPUT "Input number? (1 to 7)",Inp_char$
240 Cal_type=IVAL(Inp_char$,10)
250 IF Cal_type<1 OR Cal_type>7 THEN Type_select
260 OFF ERROR
270 !
280 SELECT Cal_type
290 CASE 1
300 Select_port(1,Port(*))
310 Cal_resp(@Agte507x,Ch$,"OPEN",Port(1))
320 CASE 2
330 Select_port(1,Port(*))
340 Cal_resp(@Agte507x,Ch$,"SHOR",Port(1))
350 CASE 3
360 Select_port(2,Port(*))
370 Cal_resp_thru(@Agte507x,Ch$,Port(1),Port(2))
380 CASE 4
390 Select_port(1,Port(*))
400 Cal_solt(@Agte507x,Ch$,1,Port(*))
410 CASE 5
420 Select_port(2,Port(*))
430 Cal_solt(@Agte507x,Ch$,2,Port(*))
440 CASE 6
450 Select_port(3,Port(*))
460 Cal_solt(@Agte507x,Ch$,3,Port(*))
470 CASE 7
480 Select_port(4,Port(*))
490 Cal_solt(@Agte507x,Ch$,4,Port(*))
500 END SELECT
510 !
520 OUTPUT @Agte507x;":MMEM:STOR:STYP CST"
530 OUTPUT @Agte507x;":MMEM:STOR """&File$&""""
540 END
550 !=============================================
560 ! Calibration Kit Selection Function
570 !=============================================
580 SUB Select_cal_kit(@Agte507x,Ch$)
590 DIM Cal_kit_lbl$(1:10)[20],Inp_char$[9]
600 INTEGER Cal_kit,I
610 CLEAR SCREEN
100 Chapter 4
 Loading...
Loading...