

Page 1

cPCI-6S10 Series
6U CompactPCI Switch Blade
User’s Manual
Manual Rev. 0.10
Revision Date: March 31, 2014
Part No: 50-15099-1000
Advance Technologies; Automate the World.
Page 2
Revision History
Revision Release Date Description of Change(s)
0.10 31/03/2015 Preliminary release
ii Revision History
Page 3

cPCI-6S10
Preface
Copyright 2015 ADLINK Technology Inc.
This document contains proprietary infor mation protected by copyright. All rights are reserved. No part of this manual may be reproduced by any mechanical, electronic, or other means in any form
without prior written permission of the manufacturer.
Disclaimer
The information in this document is subject to change without prior
notice in order to improve reliability, design, and function and does
not represent a commitment on the part of the manufa cturer.
In no event will the manufacturer be liable for direct, indirect, special, incidental, or consequential damages arising out of the use or
inability to use the product or documentation, even if advised of
the possibility of such damages.
Environmental Responsibility
ADLINK is committed to fulfill its social responsibility to global
environmental preservation through compliance with the European Union's Restriction of Hazardous Substances (RoHS) directive and Waste Electrical and Electronic Equipment (WEEE)
directive. Environmental protection is a top priority for ADLINK.
We have enforced measures to ensure that our products, manufacturing processes, components, and raw materials have as little
impact on the environment as possible. When products are at their
end of life, our customers are encouraged to dispose of them in
accordance with the product disposal and/or recovery programs
prescribed by their nation or company.
Trademarks
Product names mentioned herein are used for identification purposes only and may be trademarks and/or registered trademarks
of their respective companies.
Preface iii
Page 4
Conventions
Take note of the following conventions used throughout this
manual to make sure that users perform certain tasks and
instructions properly.
Additional information, aids, and tips that help users perform
tasks.
NOTE:
NOTE:
Information to prevent minor physical injury, component damage, data loss, and/or program corruption when trying to com-
CAUTION:
WARNING:
plete a task.
Information to prevent serious physical injury, component
damage, data loss, and/or program corruption when trying to
complete a specific task.
iv Preface
Page 5

cPCI-6S10
Table of Contents
Revision History...................................................................... ii
Preface.................................................................................... iii
List of Tables......................................................................... vii
List of Figures........................................................................ ix
1 Overview ............................................................................. 1
1.1 Block Diagram ..................................................................... 2
1.2 Package Contents ............................................................... 3
2 Specifications & Board Interfaces.................................... 5
2.1 cPCI-6S10 Specifications .................................................... 5
2.2 Board Layout ...................................................................... 6
2.3 Front Panel Layout .............................................................. 7
2.4 Connector Pinouts............................................................... 9
2.5 Switch Settings .................................................................. 17
3 Hardware Platform Management .................................... 19
3.1 Platform Management Overview ....................................... 19
3.2 IPMI Commands................................................................ 20
3.3 Controller Specific OEM/Group Commands...................... 59
4 Getting Started ................................................................. 65
4.1 Heatsink............................................................................. 65
4.2 Installing the cPCI-6S10 .................................................... 65
4.3 Configuring the cPCI-6S10................................................ 65
5 Software Management..................................................... 75
5.1 Introduction........................................................................ 75
5.2 Broadcom Network Switching Software SDK............... .... . 75
5.3 Commands ........................................................................ 76
Table of Contents v
Page 6

Important Safety Instructions............................................... 79
Getting Service...................................................................... 81
vi Table of Contents
Page 7
cPCI-6S10
List of Tables
Table 2-1: cPCI-6S10 Specifications ......................................... 5
Table 3-1: NetFn codes ........................................................... 20
Table 3-2: Response Codes .................................................... 21
Table 3-3: Required Message Length for IPMI 1.5 .................. 22
Table 3-4: cPCIS-3300BLS Chassis Slots ............................... 23
List of Tables vii
Page 8

This page intentionally left blank.
viii List of Tables
Page 9

cPCI-6S10
List of Figures
Figure 1-1: cPCI-6S10 Series Block Diagram........................... ... 2
Figure 2-1: cPCI-6S10 Board Layout........................................... 6
List of Figures ix
Page 10

This page intentionally left blank.
xList of Figures
Page 11

1Overview
The ADLINK cPCI-6S10 is a fully managed CompactPCI Gigabit
Ethernet switch blade supporting up to twenty four 1GbE ports and
two 10GbE SPF+ uplink ports. On the front panel are three GbE
ports, two 10GbE SFP+ uplink ports, one COM port and one
10/100 RJ-45 management port. Twenty GbE ports are routed to
rear I/O and an IPMI interface is provided to monitor and control
system health.
The ADLINK cPCI-6S10 integrates Broadcom BCM56150 switch
silicon along with an ARM Cortex-A9 processor and one Broadcom BCM54685 Octal port 1000BASE-T PHY. The cPCI-6S10 is
ideal for CompactPCI platform adopters who require high speed
and high bandwidth data transport interco nnect s for packe t switching management.
The ADLINK cPCI-6S10 supports ADLINK PacketManager, a software suite with an extensive feature set and integration capabilities that enables powerful networking functionality for the Base
Interface. It also provides comprehensive device management
capabilities for network administrators.
cPCI-6S10
Overview 1
Page 12
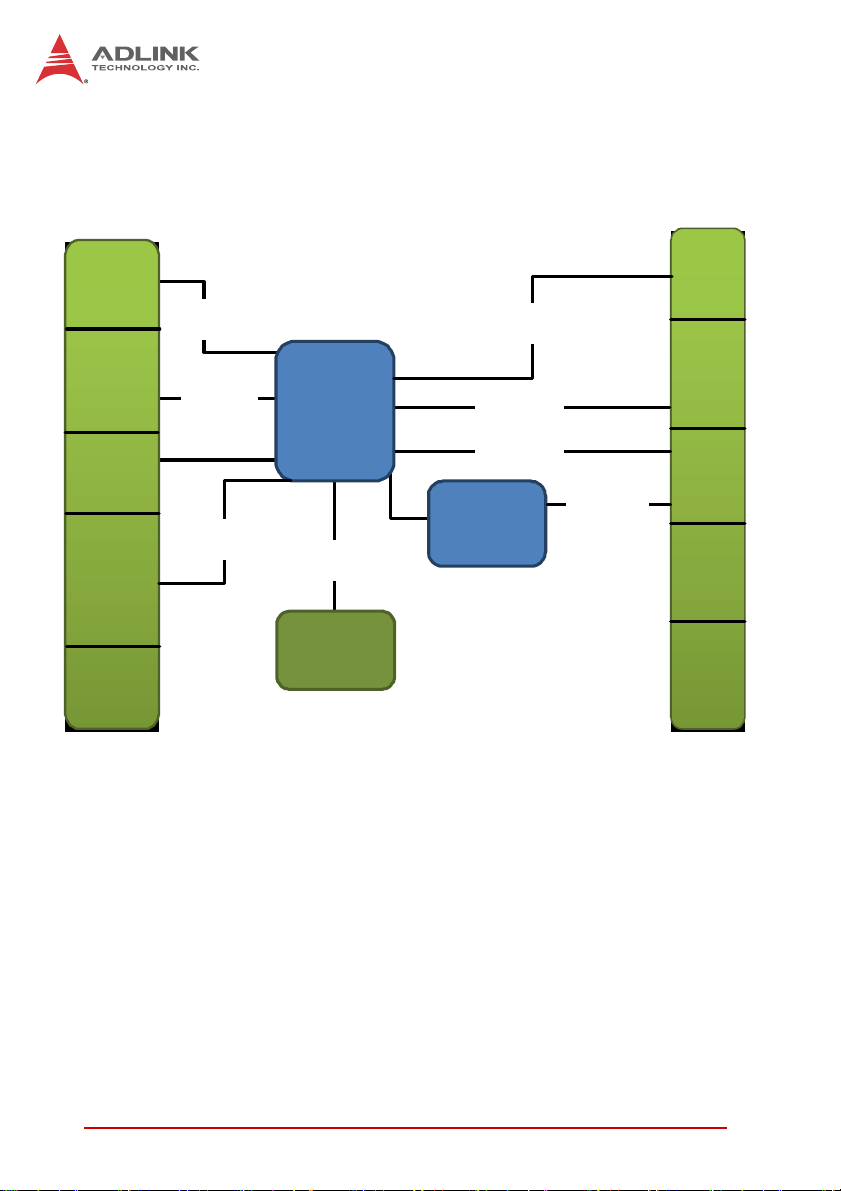
1.1 Block Diagram
Front Panel
CompactPCI
Conn.
GbE x3
10G
SFP+ x2
Mgt x1
RJ-45
COM x1
LED
MDI x3
SFI x2
UART
Figure 1-1: cPCI-6S10 Series Blo ck Diagram
BCM56150
UART
Atmel
IPMC
MDI x11
MDI x1
MDI x1
BCM54685
J5
J4
J3
MDI x8
J2
J1
2Overview
Page 13
cPCI-6S10
1.2 Package Contents
The cPCI-6S10 is packaged with the components listed below
(RTMs and adapter kits are optional). If any of the items in the
contents list are missing or damaged, retain the shipping carton
and packing material and contact the dealer for inspection. Please
obtain authorization before returning any product to ADLINK. The
packing contents of non-standard configurations may vary
depending on customer requests.
X cPCI-6S10 CompactPCI switch blade
X RJ-45 to DB-9 adapter for UART port
The contents of non-standard cPCI-6S10 Series configurations
may vary depending on customer requests.
NOTE:
NOTE:
This product must be protected from static discharge and physical shock. Never remove any of the components except at a
CAUTION:
static-free workstation. Use the anti-static bag shipped with the
product when putting the board on a surface. Wear an
anti-static wrist strap properly grounded on one of the system's
ESD ground jacks when installing or servicing system components.
Overview 3
Page 14

This page intentionally left blank.
4Overview
Page 15
2 Specifications & Board Interfaces
2.1 cPCI-6S10 Specifications
Standards and Interfaces
CompactPCI
Standard
Switch Fabric,
PHY
Networking
Front Panel IO
Rear IO 20x 10/100/1000BASE-T ports to J3 and J5
PICMG 2.0 CompactPCI Rev. 3.0
PICMG 2.9 System Management Bus Rev. 1.0
PICMG 2.16 Packet Switching Backplane Rev.1.0
• Broadcom BCM56150 24-port Gigabit Ethernet switch with
two 10G SFP+ uplink ports
• Broadcom BCM54685 Octal-port 10/100/1000BASE-T PHY
• Broadcom BCM5221 10/100BASE-TX management port
• 3x 10/100/1000BASE-T ports to front panel (BCM56150)
• 20x 10/100/1000BASE-T ports to rear (BCM56150, 9x to J3,
11x to J5)
• 1x inter-switch link 1000BASE-T
• 2x 10G SFP+ ports for uplink through BCM56150
• 1x 10/100BASE-TX for management
3x 10/100/1000BASE-T RJ-45 ports
2x 10G SFP+ interfaces for uplink interface
1x 10/100 RJ-45 management port
1x UART port via RJ-45
cPCI-6S10
Mechanical & Environmental
Dimensions 233.35mm x 160mm (L x W), 6U 4HP single slot
Operating
Temp.
Storage Temp. -50°C to 100°C
Humidity 95% non-condensing
Shock 15G peak-to-peak, 11ms duration, non-operating
Vibration Non-operating: 2G rms, 5 to 500 Hz, each axis
Compliance CE, FCC Class A
Power
Consumption
NOTE:
NOTE:
Specifications & Board Interfaces 5
Standard: 0°C to 60°C
ETT version upon request
TBD
Table 2-1: cPCI-6S10 Specifica tions
Specifications are subject to change without prior notice.
Page 16
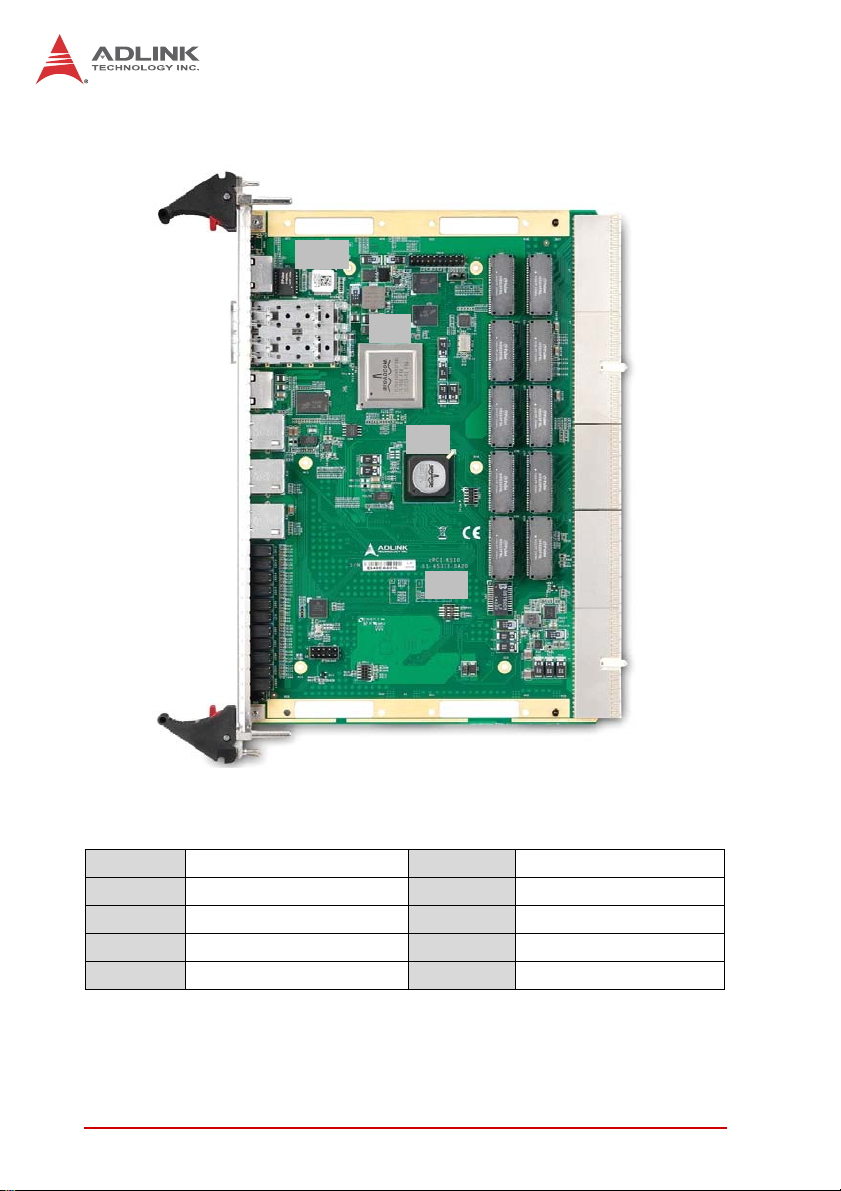
2.2 Board Layout
RJ4
CN23
CN22
CN6
RJ1
RJ3
RJ2
U100
U67
U66
SW6
J5
J4
J3
J2
J1
Figure 2-1: cPCI-6S10 Board Layout
U100 BCM5221 RJ1-3 10/100/1000 GbE
U67 BCM56150 RJ4 10/100 Mgmt GbE
U66 BCM54685 CN6 UART Port
J1-J5 CompactPCI connectors CN22-23 SFP+ Uplink ports
SW6 Standalone mode switch
6 Specifications & Board Interfaces
Page 17
cPCI-6S10
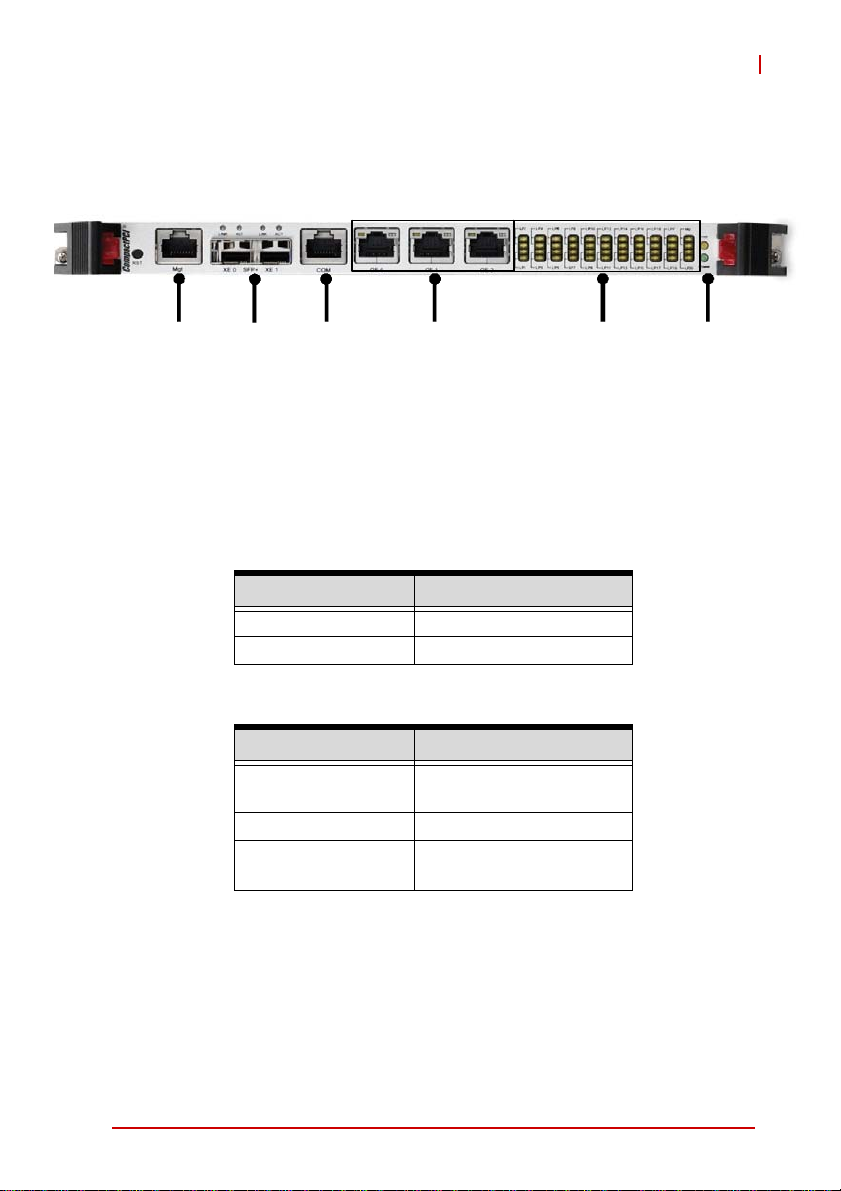
2.3 Front Panel Layout
Management
Port
SFP+ COM GbE x3 LED x22 HW LE D
Power LED
The following section describes the behavior of the LEDs on the
front panel.
Power LED
Power LED (Green) Status
On Power status normal
Off Power off
HW LED (Hardware Health)
HW LED (Yellow) Status
On
Blinking TBD
Off
Specifications & Board Interfaces 7
POST and sensor status
of IPMC is normal
POST and sensor status
of IPMC is abnormal
Page 18
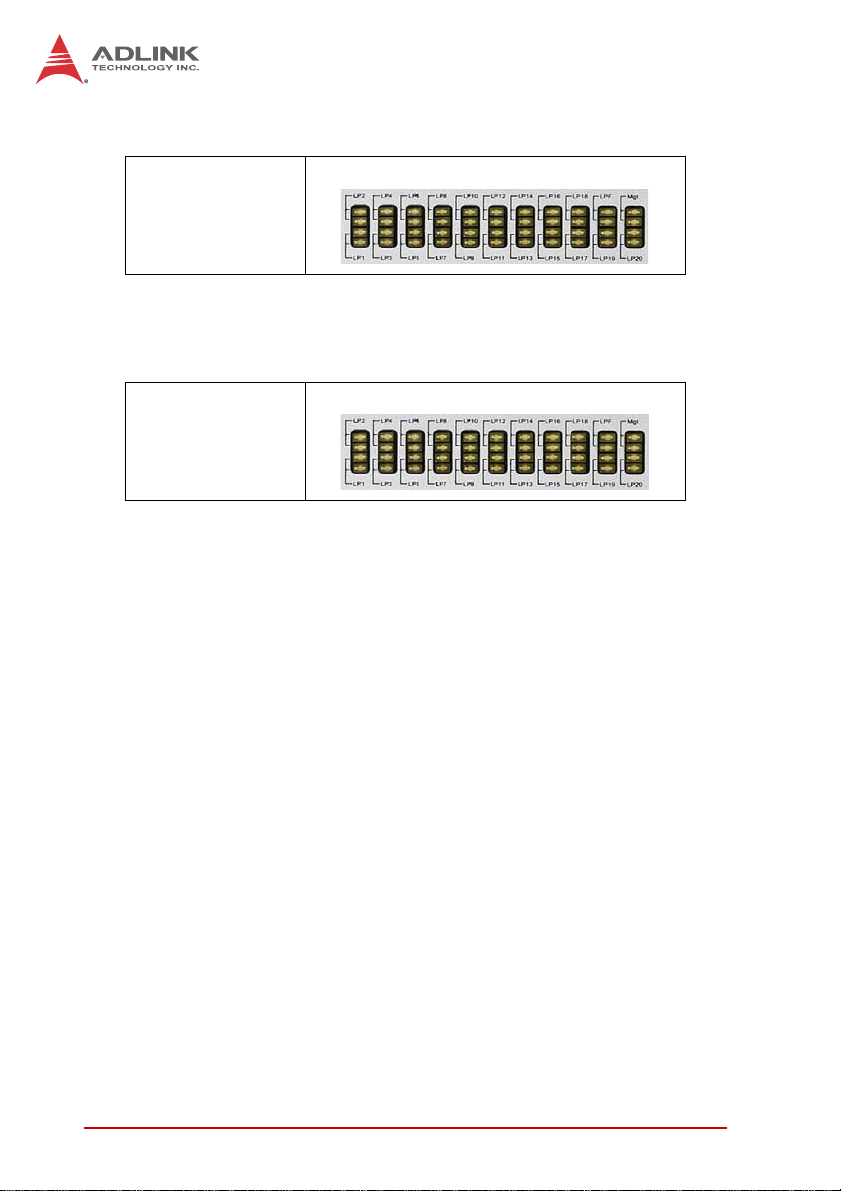
Rear IO GbE Status LEDs (LP1 - LP20)
Upper LED
On: Link up
Off: Link down
Lower LED
Blink: Packet Activity
SFP+ Status LEDs (XE 0 - XE 1)
Link LED (Green)
ON: Link up
OFF: Link down
Act LED (Orange)
Blink: Packet Activity
8 Specifications & Board Interfaces
Page 19
2.4 Connector Pinouts
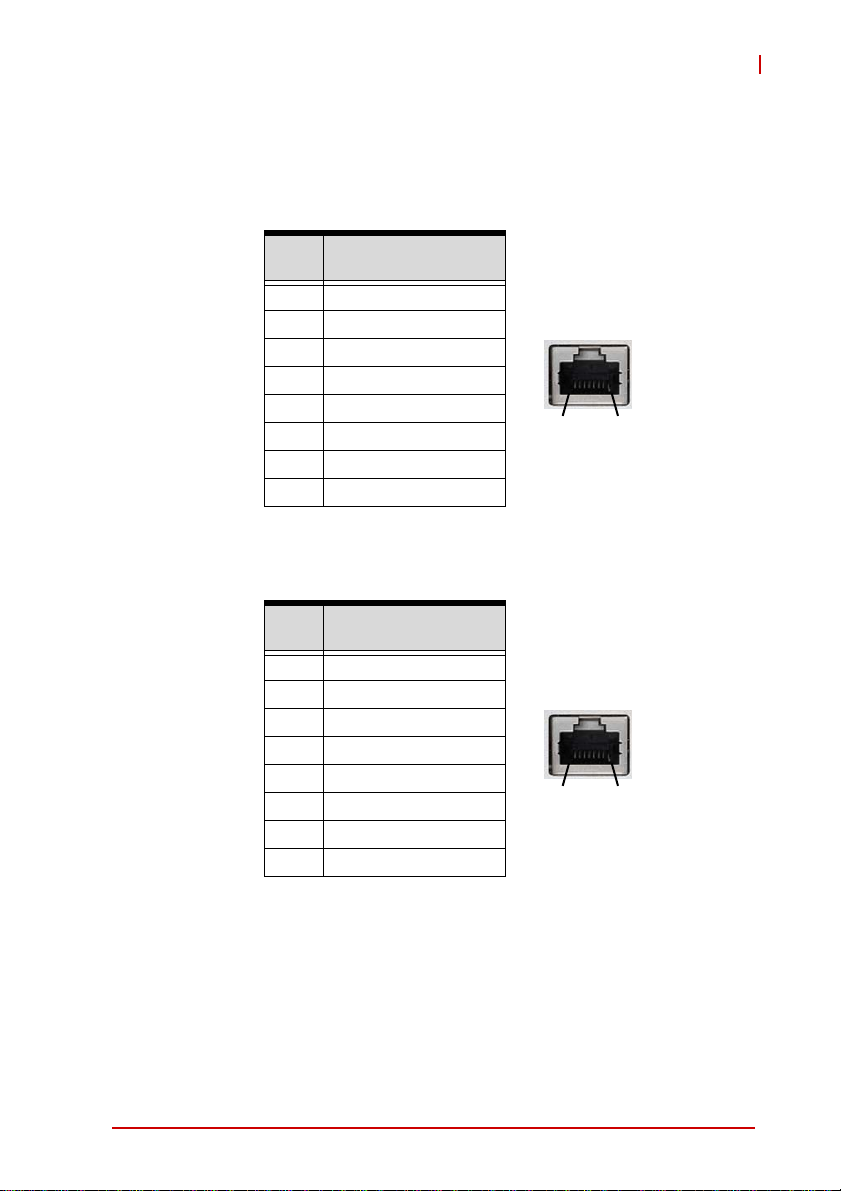
UART COM Connector (CN6)
Set SW21 to IPMI or BCM56150 UART MUX debug port
cPCI-6S10
Pin #
1NC
2NC
3NC
4 IPM_DBG_TX
5 IPM_DBG_RX
6GND
7NC
8NC
10BASE-T/
100BASE-TX
18
RJ-45 10/100BASE-T Mgmt. Ethernet Connector (RJ4)
Pin #
1NC
2NC
3NC
4 IPM_DBG_TX
5 IPM_DBG_RX
6GND
7NC
8NC
10BASE-T/
100BASE-TX
18
Specifications & Board Interfaces 9
Page 20
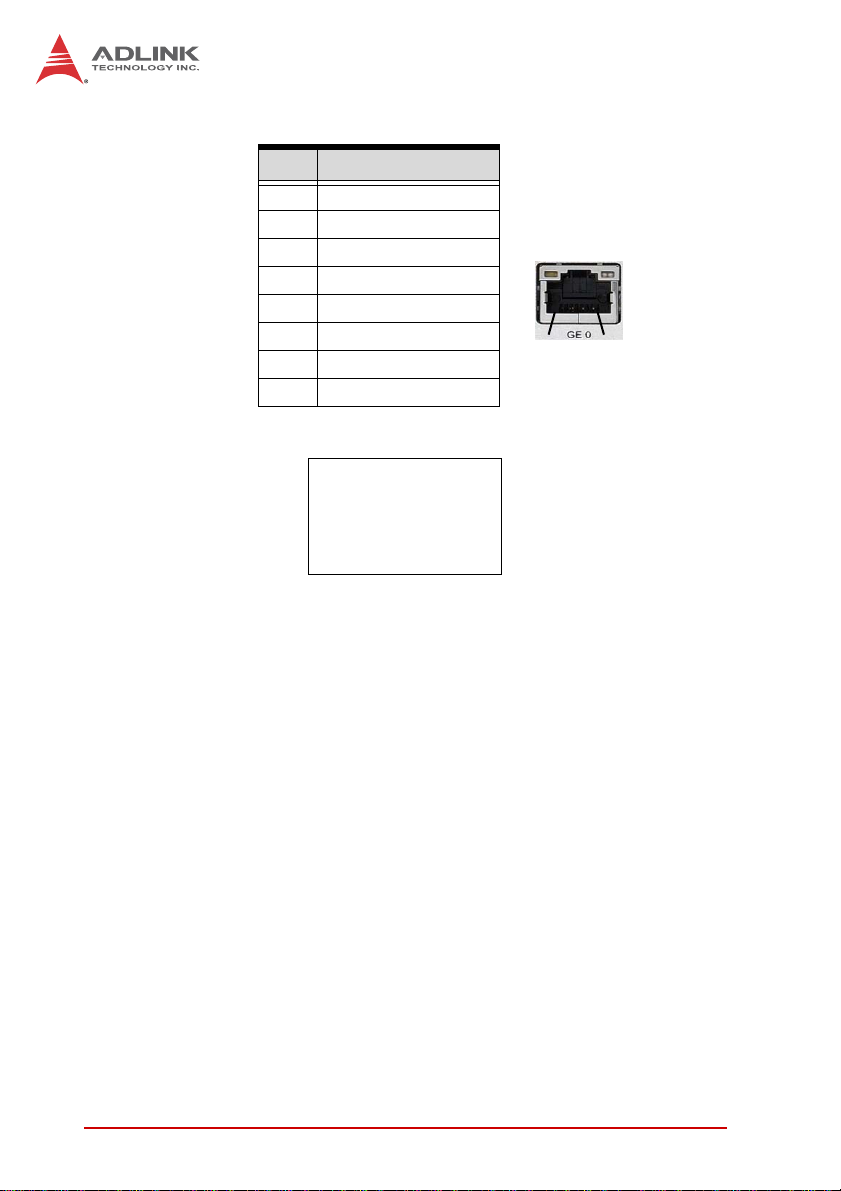
RJ-45 Gigabit Ethernet Connectors ((RJ1/2/3)
Pin # 1000BASE-T
1 LAN_TX0+
2LAN_TX03 LAN_TX1+
4 LAN_TX2+
5LAN_TX26LAN_TX17 LAN_TX3+
8 LAN_TX3+
GbE Status LEDs
Left LED
On: Link up
Off: Link down
Right LED:
Blink: Packet Activity
Link Activity
18
10 Specifications & Board Interfaces
Page 21
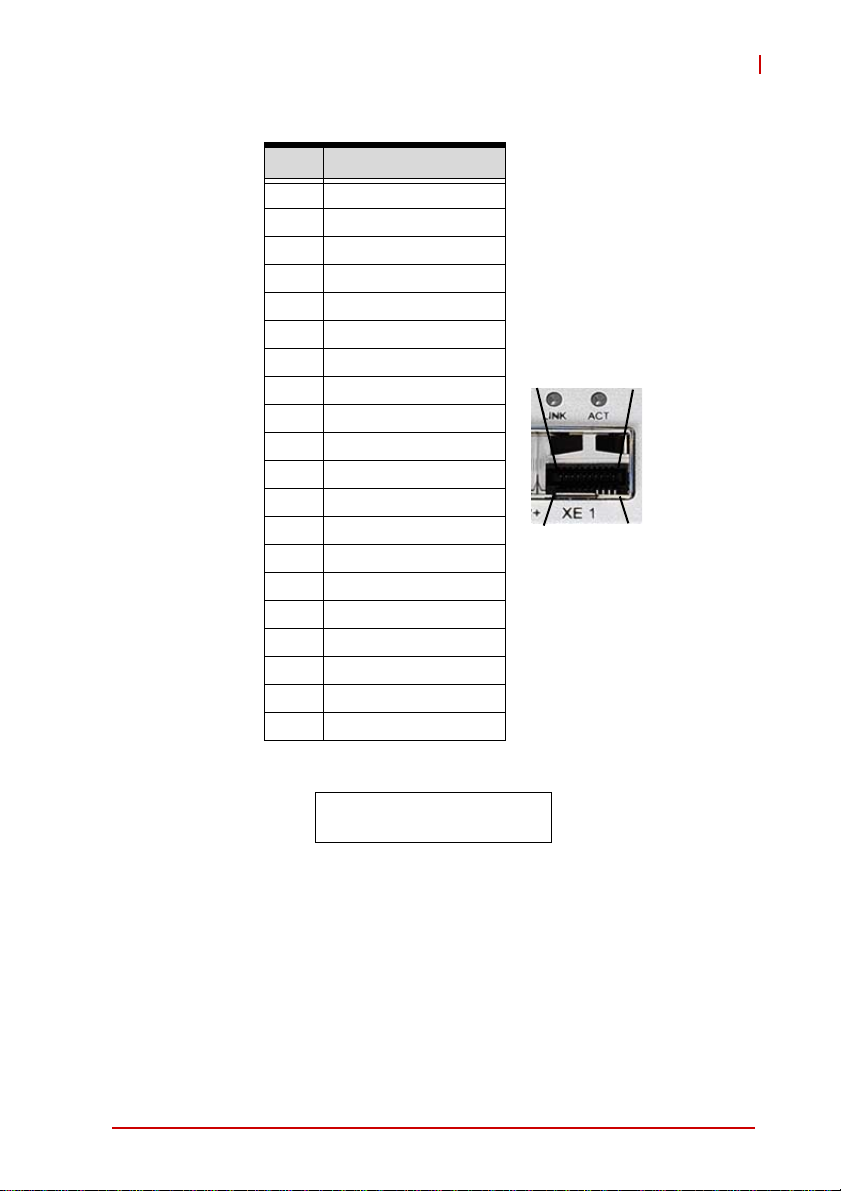
SFP+ 10Gigabit Ethernet Connector (CN22/23)
Pin # 1000BASE-T
1GND
2SFP_TX_FAULT
3 SFP_TX_DISABLE
4SFP_SDA
5SFP_SCL
6 SFP_MOD_ABS
7GND
8 SFP_RX_LOS
9GND
10 GND
11 GND
12 SRDS_RX-N
13 SRDS_RX-P
14 GND
15 SFP_V3P3_R
16 SFP_V3P3_T
17 GND
18 SRDS_TX-P
19 SRDS_TX-N
20 GND
11
cPCI-6S10
1120
10
SFP+ 10GbE Status LEDs
Link LED: Yellow (Left)
Act LED: Green (Right)
Specifications & Board Interfaces 11
Page 22
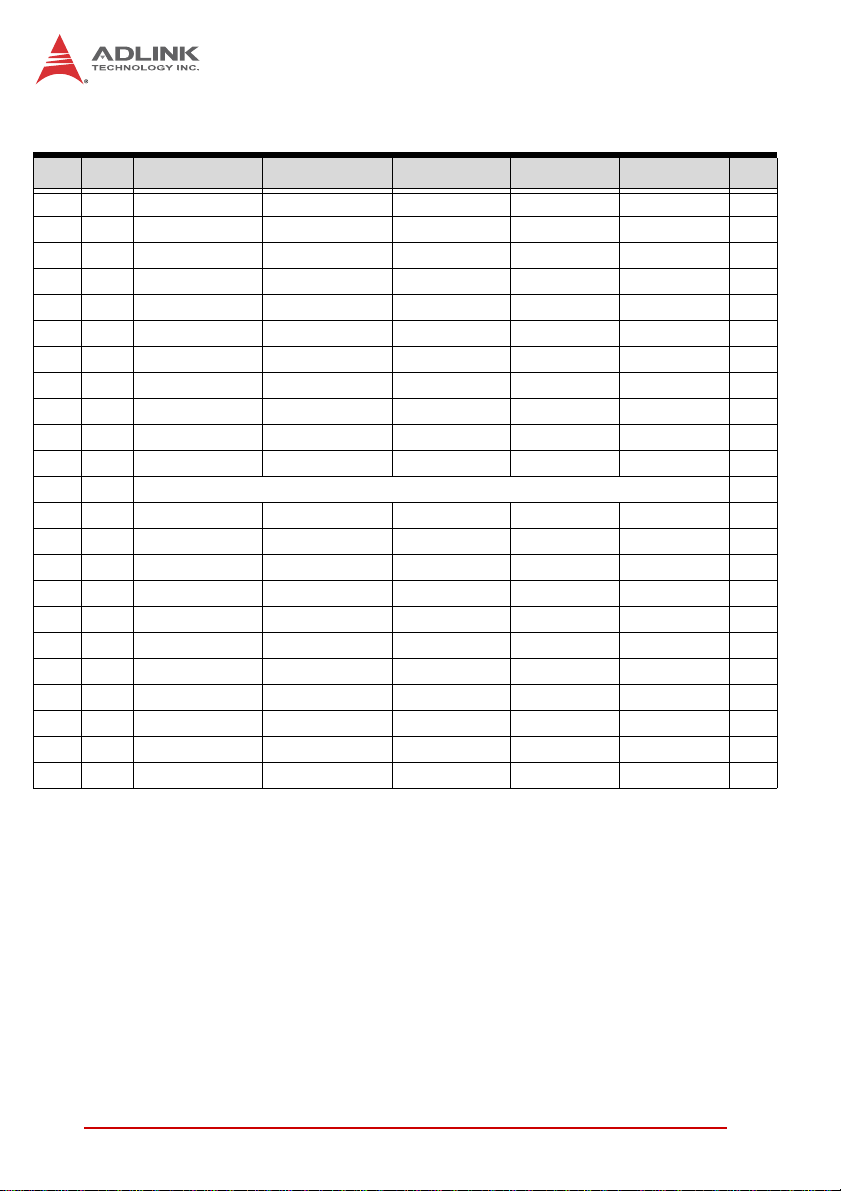
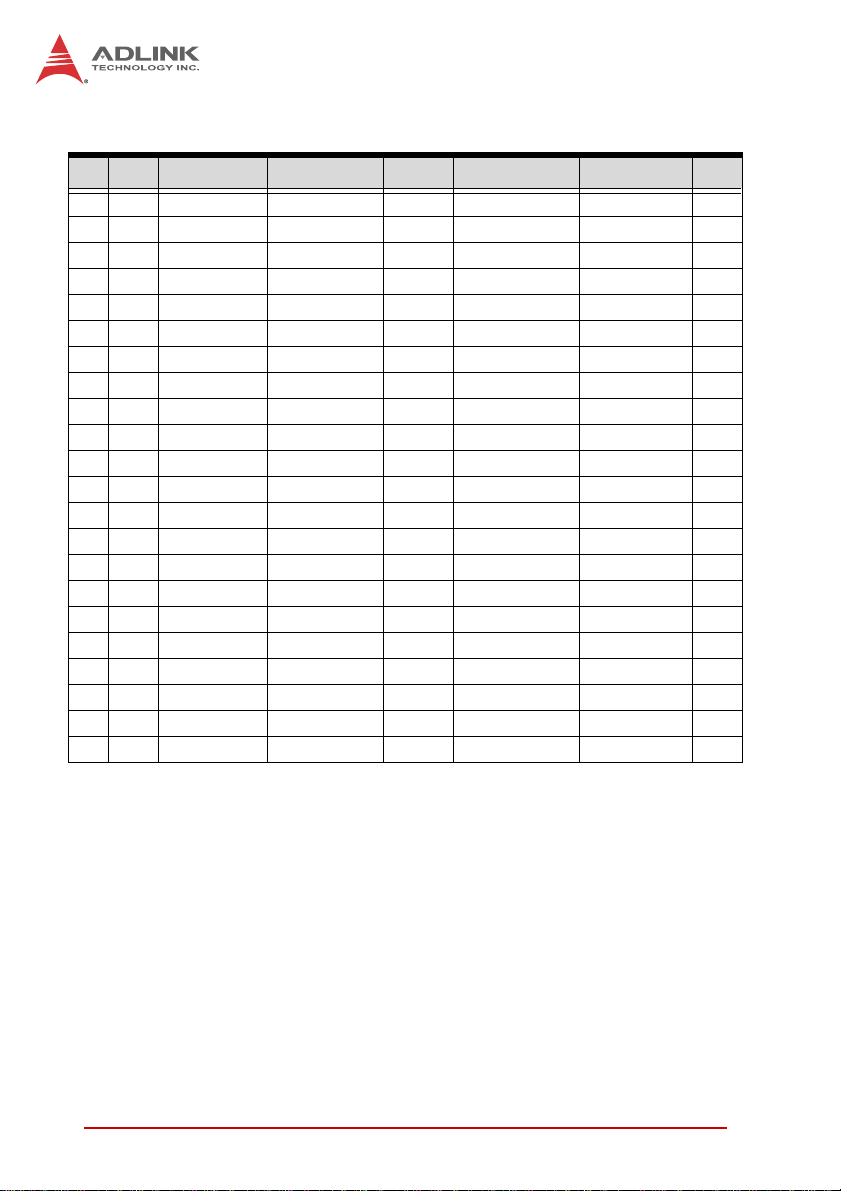
CompactPCI J1 Connector Pin Assignment
Pin Z A B C D E F
25 GND +5V REQ64# ENUM# +3.3V +5V GND
24 GND AD1 +5V V(I/O) AD0 ACK64# GND
23 GND P3V3 CPCI_AD4 CPCI_AD3 P5V CPCI_AD2 GND
22 GND CPCI_AD7 GND P3V3 CPCI_AD6 CPCI_AD5 GND
21 GND P3V3 CPCI_AD9 CPCI_AD8 CPCI_M66EN CPCI_CBE-L0 GND
20 GND CPCI_AD12 GND VIO CPCI_AD11 CPCI_AD10 GND
19 GND P3V3 CPCI_AD15 CPCI_AD14 GND CPCI_AD13 GND
18 GND CPCI_SERR-L GND P3V3 CPCI_PAR CPCI_CBE-L1 GND
17 GND P3V3 IPMB_CLK IPMB_DAT GND CPCI_PERR-L GND
16 GND CPCI_DEVSEL-L GND VIO CPCI_STOP-L CPCI_LOCK-L GND
15 GND P3V3 CPCI_FRAME-L CPCI_IRDY-L NC CPCI_TRDY-L GND
12-14 GND Key Area Key
11 GND CPCI_AD18 CPCI_AD17 CPCI_AD16 GND CPCI_CBE-L2 GND
10 GND CPCI_AD21 GND P3V3 CPCI_AD20 CPCI_AD19 GND
9 GND CPCI_CBE-L3 NC CPCI_AD23 GND CPCI_AD22 GND
8 GND CPCI_AD26 GND VIO CPCI_AD25 CPCI_AD24 GND
7 GND CPCI_AD30 CPCI_AD29 CPCI_AD28 GND CPCI_AD27 GND
6 GND CPCI_REQ-L0 GND P3V3 CPCI_CLK0 CPCI_AD31 GND
5 GND NC NC CPCI_RESET-L GND CPCI_GNT-L0 GND
4 GND P5V_IPMB
3 GND CPCI_IRQA-L CPCI_IRQB-L CPCI_IRQC-L P5V CPCI_IRQD-L GND
2 GND cPCI_TCK-L P5V cPCI_TMS-L NC cPCI_TDI-L GND
1 GND P5V N12V cPCI_TRST-L P12V P5V GND
CPCI_HEALTHY-L
VIO NC NC GND
12 Specifications & Board Interfaces
Page 23
cPCI-6S10
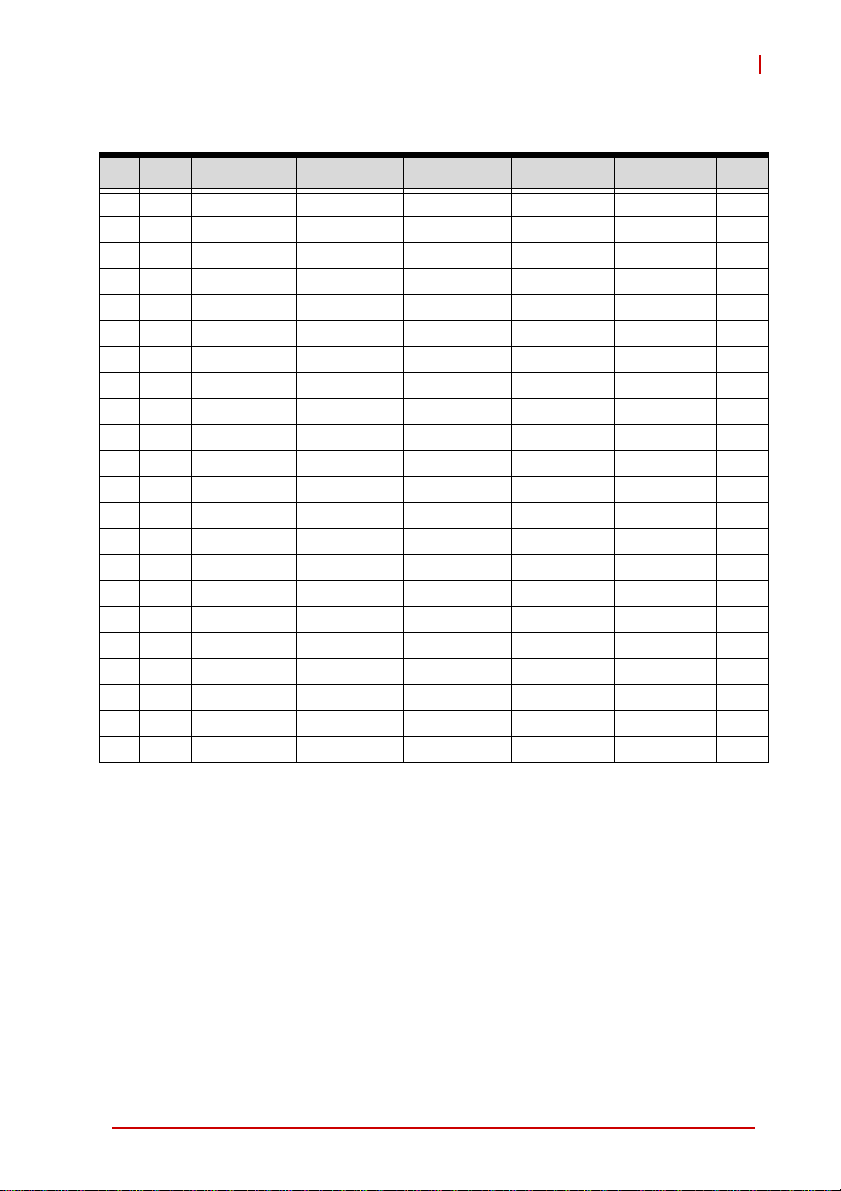
CompactPCI J2 Connector Pin Assignment
Pin Z A B C D E F
22 GND GA4 GA3 GA2 GA1 GA0 GND
21 GND CLK6 GND NC NC NC GND
20 GND CLK5 GND NC GND NC GND
19 GND GND GND NC NC NC GND
18 GND NC NC NC GND NC GND
17 GND NC GND RSTBTN# REQ6# GNT6# GND
16 GND NC NC DEG# GND NC GND
15 GND NC GND FAL# REQ5# GNT5# GND
14 GND AD35 AD34 AD33 GND AD32 GND
13 GND AD38 GND V(I/O) AD37 AD36 GND
12 GND AD42 AD41 AD40 GND AD39 GND
11 GND AD45 GND V(I/O) AD44 AD43 GND
10 GND AD49 AD48 AD47 GND AD46 GND
9 GND AD52 GND V(I/O) AD51 AD50 GND
8 GND AD56 AD55 AD54 GND AD53 GND
7 GND AD59 GND V(I/O) AD58 AD57 GND
6 GND AD63 AD62 AD61 GND AD60 GND
5 GND CBE5# GND V(I/O) CBE4# PAR64 GND
4 GND V(I/O) NC CBE7# GND CBE6# GND
3 GND CLK4 GND GNT3# REQ4# GNT4# GND
2 GND CLK2 CLK3 SYSEN# GNT2# REQ3# GND
1 GND CLK1 GND REQ1# GNT1# REQ2# GND
Specifications & Board Interfaces 13
Page 24
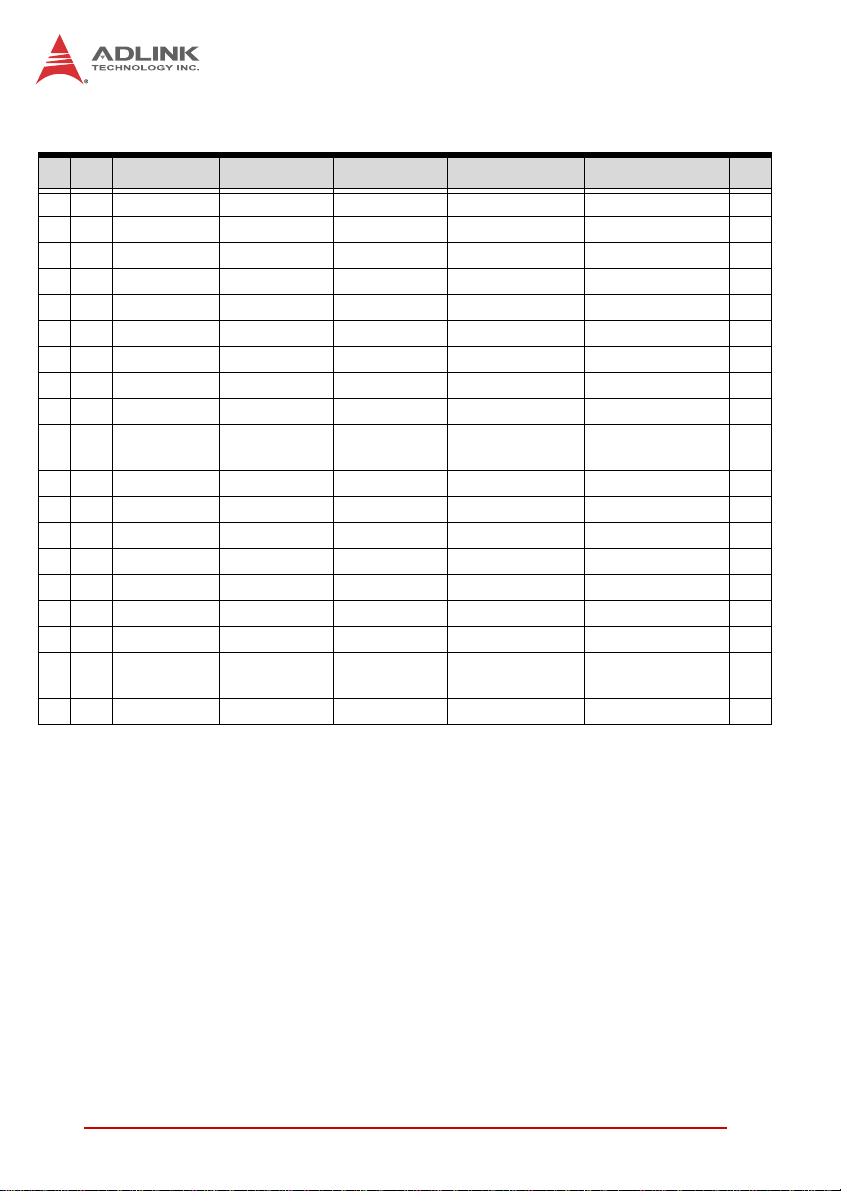
CompactPCI J3 Pin Assignment
Pin Z A B C D E F
19 GND P5V P5V P12V P5V P5V GND
18 GND LAN3_TXDP0 LAN3_TXDN0 GND LAN3_TXDP2 LAN3_TXDN2 GND
17 GND LAN3_TXDP1 LAN3_TXDN1 GND LAN3_TXDP3 LAN3_TXDN3 GND
16 GND LAN4_TXDP0 LAN4_TXDN0 GND LAN4_TXDP2 LAN4_TXDN2 GND
15 GND LAN4_TXDP1 LAN4_TXDN1 GND LAN4_TXDP3 LAN4_TXDN3 GND
14 GND USB_OC45-L USB_OC6 USB_OC7 USB_OC8 USB_OC9 GND
13 GND USB8-P USB8-N GND USB9-P USB9-N GND
12 GND USB6-P USB6-N GND USB7-P USB7-N GND
11 GND USB4-P USB4-N GND USB5-P USB5-N GND
10 GND USB_OC45-L
9 GND COM2_CTS-L COM2_RI-L CRT_BLUE CRT_RED CRT_GREEN GND
8 GND COM2_RX COM2_TX COM2_DTR-L COM2_DSR-L COM2_RTS-L GND
7 GND COM3_TX COM3_RX COM2_DCD-L IPMB_CLK IPMB_DAT GND
6 GND SATA_RXP1 SATA_RXN1 GND SATA_RXP0 SATA_RXN0 GND
5 GND GND GND NC GND GND GND
4 GND SATA_TXP1 SATA_TXN1 GND SATA_TXP0 SATA_TXN0 GND
3 GND KBDATA KBCLK NC MSDATA MSCLK GND
2 GND AUD_SDIN1 AUD_SDIN2 NC
1 GND AUD_RST-L AUD_SYNC AUD_BIT_CLK AUD_SDOUT AUD_SDIN0 GND
CRT_DDC_
CLK
CRT_DDC_
DATA
CRT_HSYNC CRT_VXYNC GND
AUD_DOCK_
EN-L
AUD_DOCK_
RST-L
GND
14 Specifications & Board Interfaces
Page 25
cPCI-6S10
CompactPCI J4 Connector Pin Assignment
Pin Z A B C D E F
25 GND BP(I/O) (1,3) BP(I/O) (1,3) BP(I/O) (1,3) BP(I/O) (1,3) BP(I/O) (1,3) GND
24 GND BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) GND
23 GND BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) GND
22 GND BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) GND
21 GND BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) GND
20 GND BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) GND
19 GND BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) GND
18 GND BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) GND
17 GND BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) GND
16 GND BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) GND
15 GND BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) GND
12-14 GND Key Area Key
11 GND BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) GND
10 GND BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) GND
9 GND BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) GND
8 GND BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) GND
7 GND BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) GND
6 GND BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) GND
5 GND BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) GND
4 GND BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) GND
3 GND BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) GND
2 GND BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) GND
1 GND BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) BP(I/O) (1,16) GND
Specifications & Board Interfaces 15
Page 26
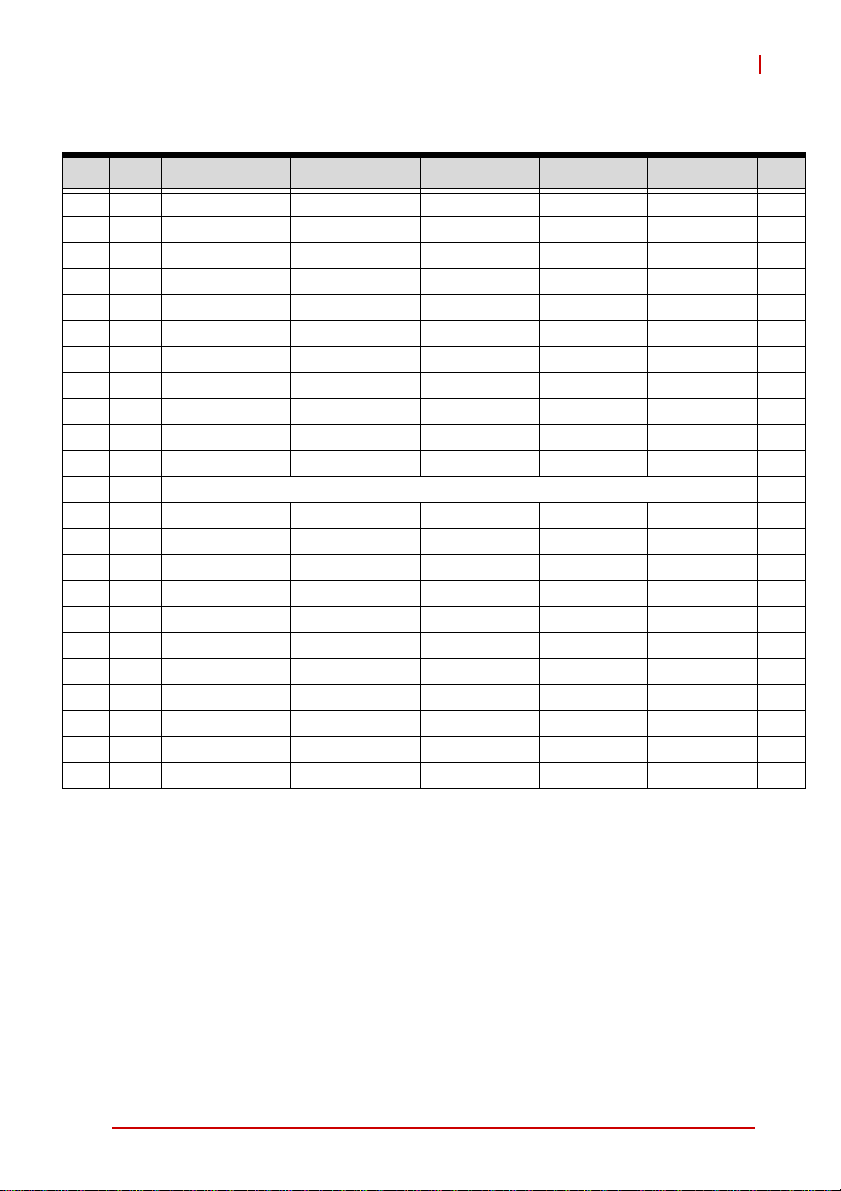
CompactPCI J5 Pin Assignment
Pin Z A B C D E F
22 GND LP19_DA+ LP19_DA- GND LP19_DC+ LP19_DC- GND
21 GND LP19_DB+ LP19_DB- GND LP19_DD+ LP19_DD- GND
20 GND LP18_DA+ LP18_DA- GND LP18_DC+ LP18_DC- GND
19 GND LP18_DB+ LP18_DB- GND LP18_DD+ LP18_DD- GND
18 GND LP17_DA+ LP17_DA- GND LP17_DC+ LP17_DC- GND
17 GND LP17_DB+ LP17_DB- GND LP17_DD+ LP17_DD- GND
16 GND LP16_DA+ LP16_DA- GND LP16_DC+ LP16_DC- GND
15 GND LP16_DB+ LP16_DB- GND LP16_DD+ LP16_DD- GND
14 GND LP15_DA+ LP15_DA- GND LP15_DC+ LP15_DC- GND
13 GND LP15_DB+ LP15_DB- GND LP15_DD+ LP15_DD- GND
12 GND LP14_DA+ LP14_DA- GND LP14_DC+ LP14_DC- GND
11 GND LP14_DB+ LP14_DB- GND LP14_DD+ LP14_DD- GND
10 GND LP13_DA+ LP13_DA- GND LP13_DC+ LP13_DC- GND
9 GND LP13_DB+ LP13_DB- GND LP13_DD+ LP13_DD- GND
8 GND LP12_DA+ LP12_DA- GND LP12_DC+ LP12_DC- GND
7 GND LP12_DB+ LP12_DB- GND LP12_DD+ LP12_DD- GND
6 GND LP11_DA+ LP11_DA- GND LP11_DC+ LP11_DC- GND
5 GND LP11_DB+ LP11_DB- GND LP11_DD+ LP11_DD- GND
4 GND LP10_DA+ LP10_DA- GND LP10_DC+ LP10_DC- GND
3 GND LP10_DB+ LP10_DB- GND LP10_DD+ LP10_DD- GND
2 GND LP9_DA+ LP9_DA- GND LP9_DC+ LP9_DC- GND
1 GND LP9_DB+ LP9_DB- GND LP9_DD+ LP9_DD- GND
16 Specifications & Board Interfaces
Page 27
cPCI-6S10
2
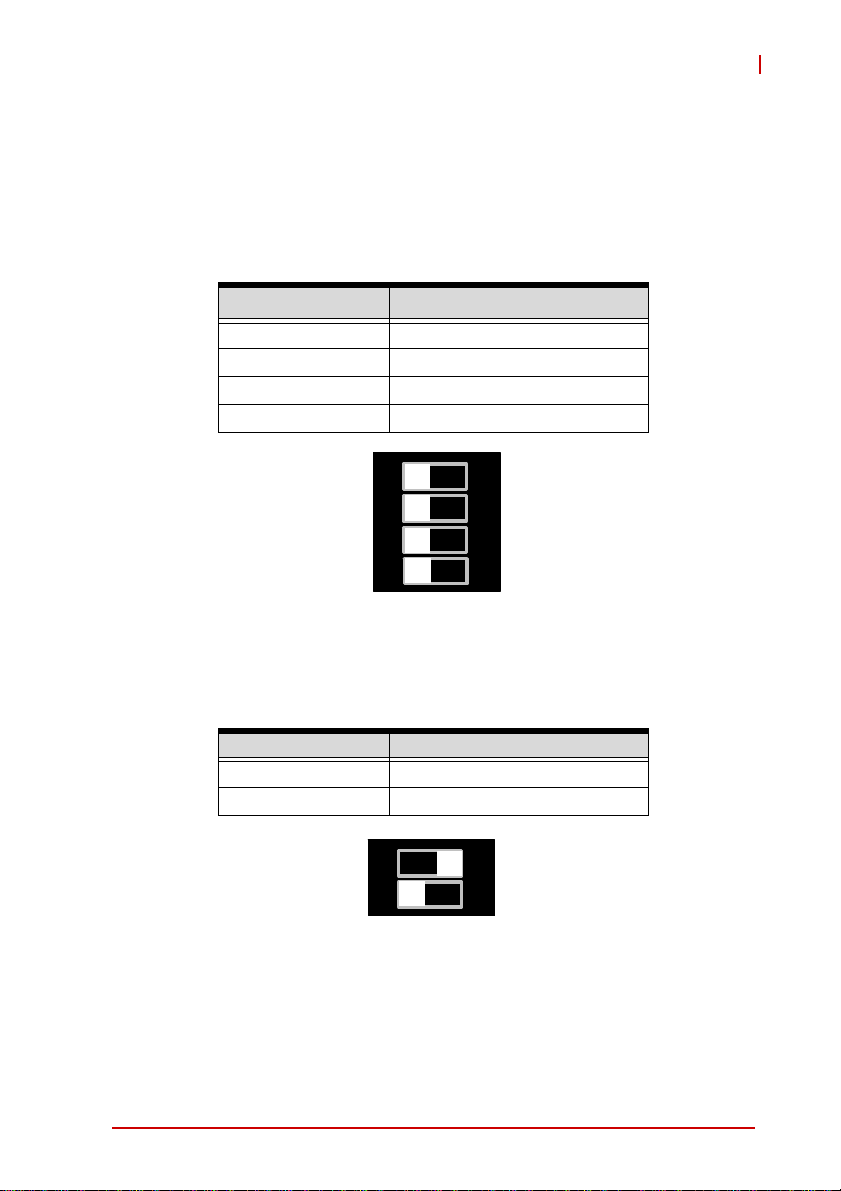
2.5 Switch Settings
Standalone/CMM Mode Switch (SW6)
The cPCI-6S10 comes with SW6 for user to set the blade to standalone mode or CMM mode. The cPCI-6S10 can boot without CMM
in standalone mode.
Pin Function
All off Stand alone mode (default)
2 ON CMM Disable
3 ON SYSTEM# ENABLE
4 ON EJECT Close
1
3 4
ON
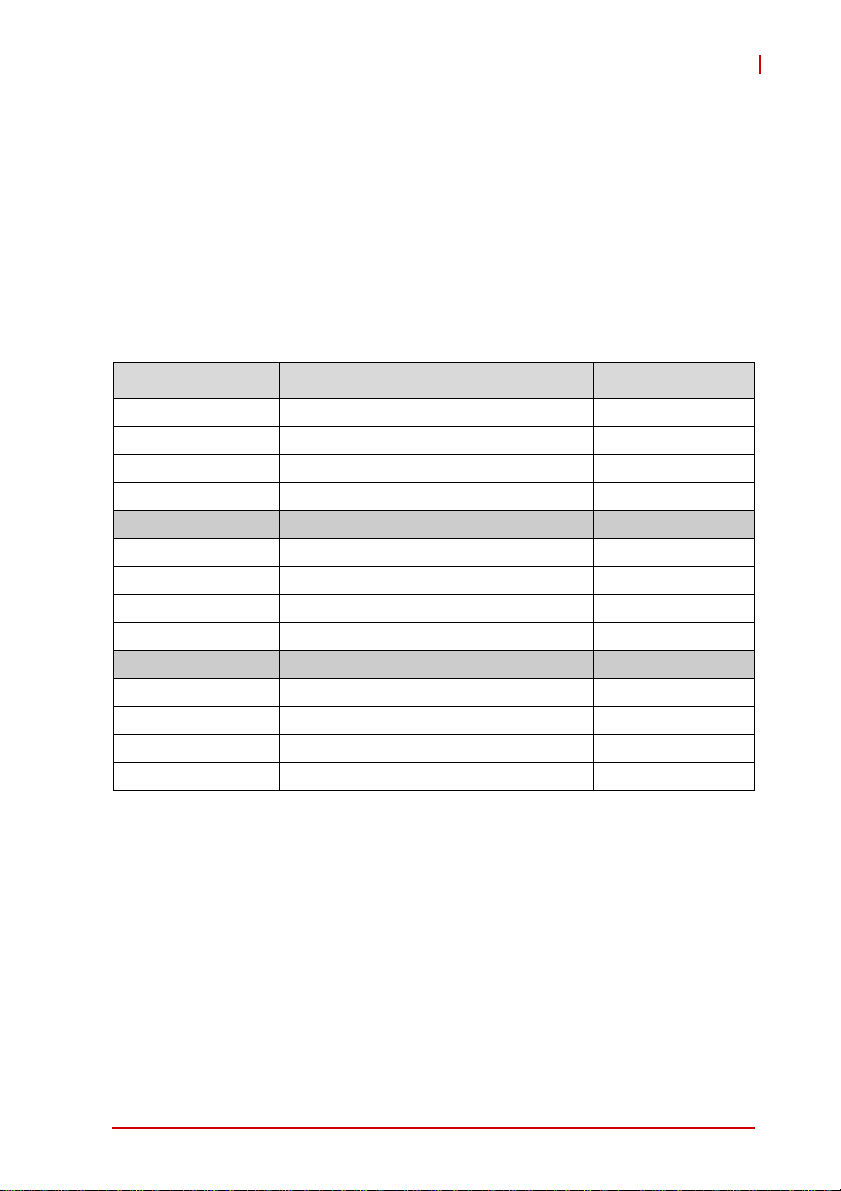
Boot Select Switch (SW13)
SW13 switch is to select boot from either SPI flash or NAND flash
Pin Function
1 ON Boot from SPI flash (Default)
2 ON Boot from nand flash
1 2
ON
.
Specifications & Board Interfaces 17
Page 28

NAND Flash Boot Mode Switch (SW14)
SW14 switch sets either Auto or Manual mode for boot from
NAND flash
Pin 1 Pin 2 Function
Off (no effect) Auto mode (default)
On On Manual mode: Select NAND 0
On Off Manual mode: Select NAND 1
1 2
ON
Console Port Switch (SW21)
SW21 switch sets the console port to either BCM5615 0 or to IPMC.
Pin Function
1/2 On, 3/4 Off Console port to BCM56150 (Default)
1/2 Off, 3/4 On Console port to IPMC
1
2
3 4
ON
18 Specifications & Board Interfaces
Page 29

3 Hardware Platform Management
3.1 Platform Management Overview
The purpose of the hardware platform management system is to
monitor, control, and assure proper operation of CompactPCI
blades. The hardware platform management system wa tches over
the basic health of the system, reports anomalies, and provides
feedback to the chassis management module (CMM) when
needed. The hardware platform management system can retrieve
inventory information and sensor readings as well as receive
event reports and failure notifications from blades and other Intelligent FRUs. The hardware platform management system can also
perform basic recovery operations such as power cycle or reset of
managed entities.
The IPMC controller on the cPCI-6S10 supports an intelligent
hardware management system, based on the Intelligent Platform
Management Interface Specification. The hardware management
system provides the ability to manage the power, cooling, and
interconnect needs of intelligent devices; monitor events; and log
events to a central repository.
cPCI-6S10
Hardware Platform Management 19
Page 30

3.2 IPMI Commands
3.2.1 Standard Commands
In terminal mode, the command is enclosed by square brackets.
Each Hex number is separated by a single blank. This command
group ranges from 0x00, 0x02, 0x04, 0x06, 0x08, 0x0A, to 0x0C in
Netfn list.
Format
Request: [18 00 02]
X Byte 1: NetFn/rsLUN(00b)
X Byte 2: rqSeq/Bridge
X Byte 3: Command
X Byte 4-n: request data
Response: [1C 00 02 00]
X Byte 1: NetFn
X Byte 2: rqSeq
X Byte 3: Command
X Byte 4: Completion code
X Byte 5-n: response data
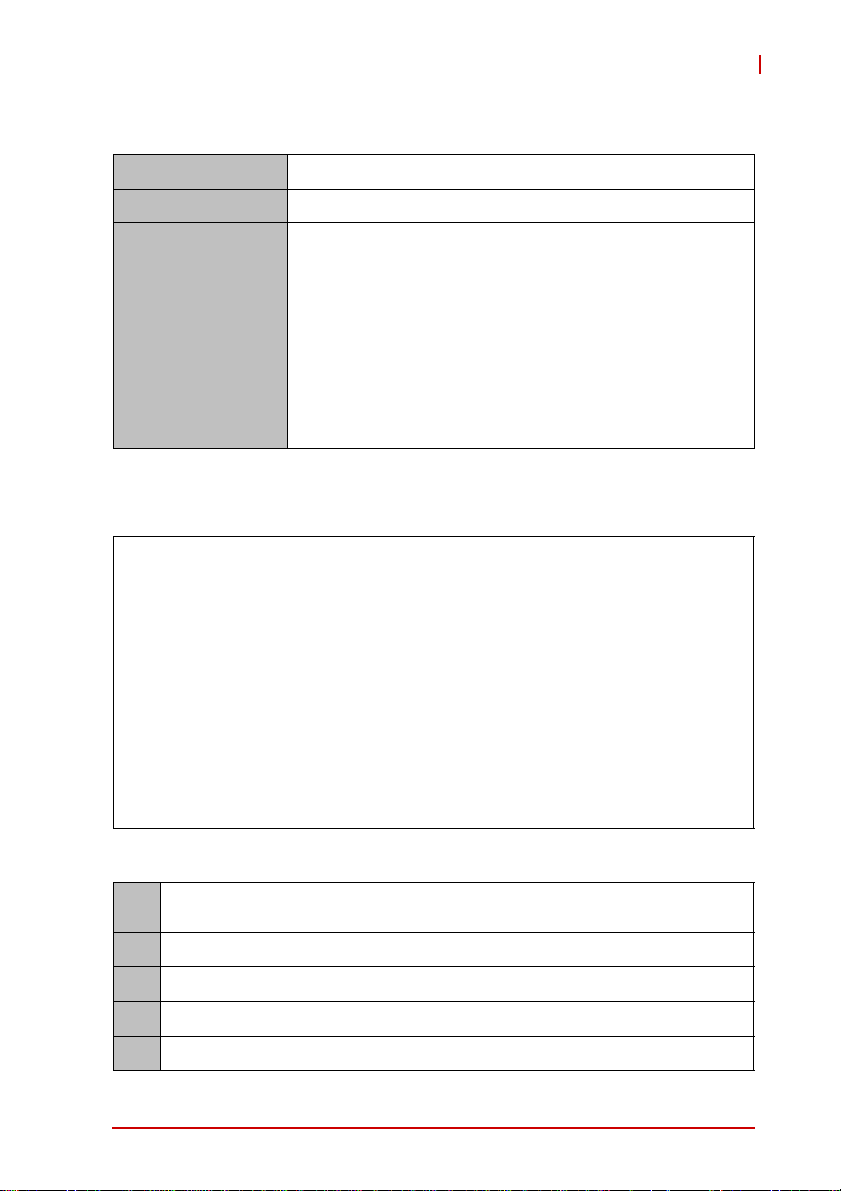
NetFn Codes:
Request Response Name
00 01 Chassis
02 03 Bridge
04 05 Sensor / Event
06 07 App
08 09 Firmware
0A 0B Storage
0C 0D Transport
0E 2B Reserved
2C 2D Group Extension
2E 2F OEM
30 3F Controller specific OEM/Group
Table 3-1: NetFn codes
20 Hardware Platform Management
Page 31

Response Codes
Description Code
IPMI_SUCCESS 0x00
IPMI_NODE_BUSY 0xC0
IPMI_INVALID_COMMAND 0xC1
IPMI_COMMAND_INVALID_FOR_LUN 0xC2
IPMI_TIMEOUT 0xC3
IPMI_OUT_OF_SPACE 0xC4
IPMI_RESERVATION_INVALID_OR_CANCELED 0xC5
IPMI_REQUEST_DATA_TRUNCATED 0xC6
IPMI_REQUEST_DATA_LENGTH_INVALID 0xC7
IPMI_REQUEST_DATA_LENGTH_LIMIT_EXCEEDED 0xC8
IPMI_PARAMETER_OUT_OF_RANGE 0xC9
IPMI_CANNOT_RETURN_NUMBER_OF_REQUESTED_BYTE
S
IPMI_REQUESTED_DATA_NOT_PRESENT 0xCB
IPMI_INVALID_DATA_IN_REQUEST 0xCC
IPMI_COMMAND_ILLEGAL_FOR_SPECIFIED_OBJECT 0xCD
IPMI_CANNOT_PROVIDE_COMMAND_RESPONSE 0xCE
IPMI_CANNOT_EXECUTE_DUPLICATED_REQUEST 0xCF
IPMI_SDR_REPOSITORY_IN_UPDATE_MODE 0xD0
IPMI_DEVICE_IN_FIRMWARE_UPDATE_MODE 0xD1
IPMI_INITIALIZATION_IN_PROGRESS 0xD2
IPMI_DESTINATION_UNAVAILABLE 0xD3
IPMI_INSUFFICIENT_PRIVILEGE_LEVEL 0xD4
IPMI_COMMAND_NOT_SUPPORTED_IN_PRESENT_STATE 0xD5
IPMI_READ_ONLY_PARAMETER 0x82
IPMI_UNSPECIFIED_ERROR 0xFF
0xCA
cPCI-6S10
T able 3-2: Response Codes
Hardware Platform Management 21
Page 32

Message Length
The IPMI standard overall message for “no-bridging” messages is
specified as 32 bytes, maximum, including slave address. For
bridging messages to other interfaces, Master Write-Read and
Send Message commands are allowed to exceed 32-bytes on
IPMI.
The table below shows the required interface length in IPMI 1.5.
Some interfaces have extra recommended values in the IPMI
specification.
Interface Length(bytes)
KCS/SMIC Input 40
KCS/SMIC Output 38
BT Input 42
BT Output 40
IPMB Input 32
IPMB Output 36
SMBus 2.0 Input 36
SMBus 2.0 Output 36
Private Bus Input 34
Private Bus Output 23
LAN/PPP Input 45
LAN/PPP Output 42
Table 3-3: Required Message Length for IPMI 1.5
3.2.2 IPMItool
IPMItool is an open-source software, which supports several message
interfaces to communicate with IPMI devices. It includes pre-define
commands such like “fru” and “mc”, and can also send raw IPMI commands.
To send IPMI commands to the cPCI-6S10’s IPMC, instead of using IPMItool under Linux login, it is possible to communicate remotely with
cPCI-6S10 IPMC through RMCP protocol, with the help of the IPMItool
utility.
22 Hardware Platform Management
Page 33
Message Interfaces
X Access through Linux driver (on LMP locally): ipmitool
<command>
X RMCP remote client: ipmitool -I lan -H <hostname> [-p
<port>] [-U <username>] [-A <authtype>] <command>
X If bridged command is issued. An extra parameter should
be applied.
Z -t: select target slave address (0xB0 for slot1, 0xB2 for
slot2, etc, in ADLINK Chassis cPCIS-3300BLS).
Slot No. IPMB Address (hex) Type
01 B0 CPU
02 B2 CPU
03 B4 CPU
04 B6 CPU
05 B8 SWH
06 BA CPU
07 BC CPU
08 BE CPU
09 C0 CPU
10 C4 SWH
11 C6 CPU
12 C8 CPU
13 CA CPU
14 CC CPU
cPCI-6S10
T able 3-4: cPCIS-3300BLS Chassis Slots
Examples
Access from local LMP
ipmitool mc info
Get device Information from onboard payload with Linux IPMI
driver.
ipmitool raw 0x06 0x01
Get device id with IPMI raw command.
Access from RMCP remote client, bridged through the BMC
Hardware Platform Management 23
Page 34

ipmitool -I lan -H 172.20.5.225 -U admin -P admin -t 0xB8 raw 0x06
0x01
Remote send raw command “Get device Id” to IPMC
(172.20.5.225) via RMCP protocol with username: admin,
password: admin, and let CMM to bridge it to CPCI-6S10
board plugged in slot 5 (slave address: 0xB8).
Response
X Complete: Completion code is 0x00 and will be skipped,
and only response data be printed.
X Error: More error message will be printed.
3.2.3 IPMItool Pre-defined Commands
X ipmitool raw: Send a raw command request.
X ipmitool mc: Print the management controller status and
global enabled options.
# ipmitool mc
MC Commands:
reset <warm|cold>
info
wdt
selftest
getenables
setenables <option=on|off> ...
recv_msg_intr Receive Message Queue Int.
event_msg_intr Event Message Buffer Full Int.
event_msg Event Message Buffer
system_event_log System Event Logging
oem0 OEM 0
oem1 OEM 1
oem2 OEM 2
X ipmitool fru: Print built-in FRU and scan SDR for FRU loca-
tors.
# ipmitool fru
FRU Device Description: Builtin FRU Device (ID 0)
Board Mfg Date: Tue Sep 16 20:00:00 2014
Board Mfg: ADLINK Technology
24 Hardware Platform Management
Page 35

cPCI-6S10
Board Product: cPCI-6S10
Board Serial: ADLINK-XXXX-XXXX
Board Part Number: cPCI-6S10
Product Manufacturer: ADLINK Technology
Product Name: cPCI-6S10
Product Part Number: cPCI-6S10
Product Version: A2
Product Serial: ADLINK-XXXX-XXXX
Product Asset Tag: N/A
X
ipmitool -I lan -H 172.20.5.225 -U admin -P admin -t 0xB4 sdr:
Print Sensor Data Repository entries and readings.
BMC_WatchDog | no reading | ns
POWER_GOOD | 0 unspecified | cr
P1V | 1.01 Volts | ok
P1V2 | 1.20 Volts | ok
P1V5 | 1.50 Volts | ok
P0V75 | 0.74 Volts | ok
+3.3V | 3.32 Volts | ok
+5.0V | 5.05 Volts | ok
54685_TEMP | 47 degrees C | ok
56150_TEMP | 67 degrees C | nc
3.2.4 Supported IPMItool Commands
Get Device ID
ipmitool ipmitool [parameters] mc info
Te rminal mode [18 00 01]: raw 0x06 01
Description Get device’s id from selected MC.
Example
root@BDSP-A-0-0-1:~# ipmi mc info
Device ID : 18
Device Revision : 0
Firmware Revision : 1.2
IPMI Version : 1.5
Manufacturer ID : 24339
Manufacturer Name : Unknown (0x5F13)
Product ID : 21267 (0x5313)
Hardware Platform Management 25
Page 36

Product Name : Unknown (0x5313)
Device Available : yes
Provides Device SDRs : yes
Additional Device Support :
Sensor Device
FRU Inventory Device
IPMB Event Generator
Aux Firmware Rev Info :
0xa1
0x00
0x00
0x00
Response Data Fields
1 Completion cod e
2 Device ID. 00 = unspecified.
3 Device Revision
4 Firmware Revision 1
5 Firmware Revision 2
6 IPMI version
7 Addition Device support
8:10 Manufacture ID
11:12 Product ID
Cold Reset
ipmitool ipmitool [parameters] mc reset cold
Terminal mode [18 00 02]: raw 0x06 0x02
Description Reset IPMC
26 Hardware Platform Management
Page 37

In IPMC console, cold reset message will be printed.
<_>: BMR-AVR Firmware (v1.0.2), cPCI edition.
<_>: Pigeon Point Systems (c) Copyright 2004.
<_>: boot_type: 0xA3
<_>: Reset type: COLD, reset cause: Software
<_>: app_status: 0x01
<_>: Operating mode: Normal
Response Data Fields
1 Completion code
Reset Watchdog Timer
ipmitool ipmitool [parameters] mc wdt rst
Te rminal mode [18 00 22]: raw 0x06 0x22
Description
Response Data Fields
This command is used to reset IPMC watchdog timer.
The ipmitool supports this command.
cPCI-6S10
1 Completion code
Set Watchdog Timer
ipmitool
Te rminal mode [18 00 24 03 01 00 20 00 01]
Description This command is used to set IPMC watchdog timer.
Hardware Platform Management 27
ipmitool [parameters] raw 0x06 0x24 0x03 0x01 0x00
0x20 0x00 0x01
Page 38

Response Data Fields
Time use
[7] –1b = don’t log
[6] –1b = do not stop timer on set Watchdog Timer command.
[5:3] – reserved
[2:0] – timer use
000b = reserved
1
001b = BIOS FRB2
010b = BIOS/POST
011b = OS Load
100b = SMS/OS
101b = OEM
110b – 111b = reserved
Timer actions
[7] – reserved
[6:4] – pre-timeout interrupt
000b = none
001b = SMI
010b = NMI / Diagnostic Interrupt
011b = Messaging interrupt
2
110b,111b = reserved
[3] – reserved
[2:0] = timeout action
000b = no action
001b = Hard reset
010b = Power down
01 1b = Power cycle
110b,111b = reserved
3 Pre-timeout interval in seconds.
Timer use expiratio n fl a gs clea r
(0b = leave alone, 1b = clear timer use expiration bit)
[7] – reserved
[6] – reserved
[5] – OEM
4
[4] – SMS/OS
[3] – OS/Load
[2] – BIOS/POST
[1] – BIOS FRB2
[0] – reserved
5 Initial countdown value, lsbyte(100ms/count)
6 Initial countdown value, msbyte
28 Hardware Platform Management
Page 39

Get Watchdog Timer
ipmitool ipmitool [parameters] mc watchdog get
Te rminal mode [18 00 25] : raw 0x06 0x25
Description
Response:
root@iProc /root:~# ipmitool mc watchdog get
Timer Use: 0x42 - BIOS/POST
Timer Actions: 0x01 - Hard Reset
Pre-timeout interval: 0x00
Timer Use Expiration: 0x00
Initial Countdown: 360 ms
Present Countdown: 357 ms
Response Data Fields
1 Completion code
Timer use
[7] –1b = don’t log
[6] –1b = timer started.
0b = timer stopped.
[5:3] – reserved
[2:0] – timer use
2
000b = reserved
001b = BIOS FRB2
010b = BIOS/POST
011b = OS Load
100b = SMS/OS
101b = OEM
110b – 111b = reserved
This command is used to get watchdog timer info.
We can use ipmitool command to get this information.
cPCI-6S10
Hardware Platform Management 29
Page 40

Timer actions
[7] – reserved
[6:4] – pre-timeout interrupt
000b = none
001b = SMI
010b = NMI / Diagnostic Interrupt
011b = Messaging interrupt
3
110b,111b = reserved
[3] – reserved
[2:0] = timeout action
000b = no action
001b = Hard reset
010b = Power down
01 1b = Power cycle
110b,111b = reserved
4 Pre-timeout interval in seconds.
Timer use expirati o n fl a gs
(1b = timer expired while associated ‘use’ was selected)
[7] – reserved
[6] – reserved
[5] – OEM
5
[4] – SMS/OS
[3] – OS/Load
[2] – BIOS/POST
[1] – BIOS FRB2
[0] – reserved
6 Initial countdown value, lsbyte(100ms/count)
7 Initial countdown value, msbyte
8 Preset countdown value, lsbyte
9 Preset countdown value, msbyte
30 Hardware Platform Management
Page 41

Master Write-Read
ipmitool Ipmitool [parameters] raw 0x06 0x52 …
Te rminal mode [18 00 52 ….]
This command is used for low-level I2C write, read, or
Description
Request Fields
Bus ID:
[7:4] channel number
[3:1] bus ID, 0-based (always 000b for public bus)
1
[0] bus type:
0 = public (e.g. IPMB or PCI Management Bus)
1 = private bus
[7:1] - Slave Address
2
[0] - reserved. Write as 0.
Read count. Number of bytes to read, 1 based. 0 = no bytes to read.
The maximum read count should be at least 34 bytes. This allows the
command to be used for an SMBus Block Read. This is required if the
command provides access to an SMBus or IPMB. Otherwise, if FRU
3
SEEPROM devices are accessible, at least 31 bytes must be
supported. Note that an implementation can support fewer bytes can
be supported if none of the devices to be accessed can handle the
recommended minimum.
Data to write. This command should support at least 35 bytes of write
data. This allows the command to be used for an SMBus Block Write
with PEC. Otherwise, if FRU SEEPROM devices are accessible, at
4:N
least 31 bytes must be supported. Note that an implementation is
allowed to support fewer bytes if none of the devices to can handle
the recommended minimum.
write-read access to IPMB or private busses behind a
management controller.
cPCI-6S10
Hardware Platform Management 31
Page 42

Response Data Fields
Completion Code
A management controller shall return an error Completion Code if an
attempt
is made to access an unsupported bus.
1
generic, plus following command specific codes:
81h = Lost Arbitration
82h = Bus Error
83h = NAK on Write
84h = Truncated Read
Bytes read from specified slave address. This field will be absent if the
(2:M)
read count is 0. The controller terminates the I 2 C transaction with a
STOP condition after reading the requested number of bytes.
Set Event Receiver
ipmitool ipmitool [parameters] raw 0x04 0x00 0x20 0x00
Terminal mode [10 00 00 20 00]
Description
Request Data Fields
Set event receiver address, default event receiver is
0x20.
1
Slave address
2 [7:2] = reserved
[1:0] = Event receiver LUN
Note: The commands “Set event receiver” and “Get event
receiver” are used for event delivery between IPMC and BMC.
Other address (except 0x20 to CMM by default) will cause incorrect behavior.
32 Hardware Platform Management
Page 43

Get Event Receiver
ipmitool ipmitool [parameters] raw 0x04 0x01
Te rminal mode [10 00 01]
Description Get event receiver’s slave address
Response Data Fields
1
Completion code
2
Slave address
3 [7:2] = reserved
[1:0] = Event receiver LUN
Note: The commands “Set event receiver” and “Get event
receiver” are used for event delivery between IPMC and CMM.
Other address (except 0x20 to CMM by default) will cause incorrect behavior.
Platform Event
cPCI-6S10
ipmitool
Te rminal mode [10 00 02 04 01 01 01 07 FF FF 48]
Description
ipmitool [parameters] raw 0x04 0x02 0x04 0x01 0x01
0x01 0x07 0xFF 0xFF 0x48
Send event to event receiver. We don’t need to fire this
command directly.
This command can be testing when we test sensor event.
Note: The command “Platform event” is only available from Linux
driver side. IPMC would only accept this command from Addin
card, and drops messages from CMM with bridged format.
Because IPMC only send this command to CMM, IPMC don’t
receive this command coming from outside.
Hardware Platform Management 33
Page 44

We can test IPMC by sending a event to BMC:
root@BCNMB-A:~# ipmitool raw 0x2E 0x88 0x39 0x28
0x00 0x02
39 28 00
root@BCNMB-A:~# ipmitool -I lan -H 172.20.225 -U
admin -P admin sel list last 1
2e | 04/28/2010 | 00:49:19 | Add-in Card #0x9d
| soft reset | Asserted
Get Device SDR Info
ipmitool ipmitool [parameters] raw 0x4 0x20
Terminal mode [10 00 20]
Description Get device sdr information
root@BCNMB-A:~# ipmitool raw 0x4 0x20
0a 01 00 00 00 00
Response Fields
1
Completion code
2
Number of sensors in device for LUN this command was ad d r essed to.
3 Flags:
Dynamic population
[7] – 0b = static sensor population
1b = dynamic sensor population
[6:4] = reserved
Device LUns:
[3] – 1b = LUN 3 has sensors
[2] – 1b = LUN 2 has sensors
[1] – 1b = LUN 1 has sensors
[0] – 1b = LUN 0 has sensors
4:7 Sensor Population Change Indicator LS byte first.
Four byte timestamp or counter. Updated or incremented each time the
sensor population changes. This field is not provided if the flags indicate a
static sensor population.
34 Hardware Platform Management
Page 45
Get Device SDR
ipmitool ipmitool [parameters] sdr list all
Te rminal mode [10 00 21 00 00 00 00 00 FF]
This command is used to get SDR info. SDR format
depends on IPMI spec.
Ipmitool support sdr command to read those data. We
can use “ipmitool sdr” to get those data without pain.
Description
Example:
List all SDR from IPMC (from Device SDR)
root@BCNMB-A:~# ipmitool -I lan -H 172.20.5.225
cPCI-6S10 | Dynamic MC @ B4h | ok
BMC_WatchDog | 0 unspecified | nc
POWER_GOOD | 0 unspecified | cr
P1V | 1.01 Volts | ok
P1V2 | 1.20 Volts | ok
P1V5 | 1.50 Volts | ok
P0V75 | 0.74 Volts | ok
+3.3V | 3.32 Volts | ok
+5.0V | 5.05 Volts | ok
54685_TEMP | 48 degrees C | ok
56150_TEMP | 66 degrees C | nc
If MC support “SDR repository device”, ipmitool will use
“SDR repository” first.
When MC only support “Sensor Device”, this command
has been applied to retrieve SDR.
We fix ipmitool to support list SDR from Device SDR with
“list” command.
-U admin -P admin -t 0xB8 sdr list all
cPCI-6S10
Request Fields
1 Reservation ID. LS Byte. Only required for partial reads with a non-zero
‘Offset into record’ field. Use 0000h for reservation ID otherwise.
2
Reservation ID. MS Byte.
3
Record ID of record to Get LS Byte. 0000h returns the first record
4
Record ID of record to Get, MS Byte.
5
Offset into record
Hardware Platform Management 35
Page 46

6
Bytes to read. FFh means read entire record
Response Fields
1
Completion code
2
Record ID for next record, LS Byte
3
Record Id for next record. MS Byte
4:3+N
Requested bytes from record
Reserve Device SDR Repository
ipmitool ipmitool [parameters] raw 0x04 0x22
Terminal mode [10 00 22]
Description
This command is used to obtain a reservation ID.
Reserve ID is used by “Get Device SDR” command.
Response Fields
1
Completion code
2
Reservation ID, LS Byte 0000h reserved
3
Reservation ID, MS Byte
Set Sensor Threshold
ipmitool
Terminal mode [10 00 26 00 00 00 00 00 00 00 00]
Description
36 Hardware Platform Management
ipmitool [parameters] sensor thres h “sensor id”
<threshold> <setting>
This command is used to set sensor threshold. We can
use ipmitool to fire this command.
Page 47

Command Format:
sensor thresh <id> <threshold> <setting>
id : name of the sensor for which
threshold is to be set
threshold : which threshold to set
unr = upper non-recoverable
ucr = upper critical
unc = upper non-critical
lnc = lower non-critical
lcr = lower critical
lnr = lower non-recoverable
setting : the value to set the threshold to
Example:
Set sensor “56150_TEMP”’s UNR threshold to 88
ipmitool –I lan –H 172.20.5.225 –U admin –P
admin –t 0xB8 sensor thresh “56150_TEMP” unr
88
Request Fields
1
Sensor number( FFh = reserved)
2 [7:6] – reserved
[5] – 1b = set upper non-recoverable threshold
[4] – 1b = set upper critical threshold
[3] – 1b = set upper non- critical threshold
[2] – 1b = set lower non-recoverable threshold
[1] – 1b = set lower critical threshold
[0] – 1b = set lower non- critical threshold
3
Lower non-critical threshold
4
Lower critical threshold
5
Lower non-recoverable threshold
6
Upper non-critical threshold
7
Upper critical threshold
8
Upper non-recoverable threshold
cPCI-6S10
Hardware Platform Management 37
Page 48

Response Fields
1
Completion code
Get Sensor Threshold
ipmitool ipmitool [parameters] sensor get <sensor id>
Terminal mode [10 00 27 00]
Description
Example:
root@BCNMB-A:~# ipmitool -I lan -H 172.20.5.225
Locating sensor record...
Sensor ID : 56150_TEMP (0x8)
Entity ID : 160.96
Sensor Type (Analog) : Temperature
Sensor Reading : 67 (+/- 0) degrees C
Status : Upper Non-Critical
Lower Non-Recoverable : na
Lower Critical : na
Lower Non-Critical : na
Upper Non-Critical : 60.000
Upper Critical : 75.000
Upper Non-Recoverable : 88.000
Assertion Events : unc+
Deassertion Events : lnc- lnc+ lcr- lcr+
Assertions Enabled : unc+ ucr+ unr+
Deassertions Enabled : unc+ ucr+ unr+
This command is used to get threshold. We can use
ipmitool command to get this info.
-U admin -P admin sensor get "56150_TEMP "
lnr- lnr+ unc- ucr- ucr+ unr- unr+
Request Fields
1
Sensor number( FFh = reserved)
38 Hardware Platform Management
Page 49

Response Fields
1
Completion code
2 [7:6] – reserved
[5] – 1b = upper non-recoverable threshold
[4] – 1b = upper critical threshold
[3] – 1b = upper non- critical threshold
[2] – 1b = lower non-recoverable threshold
[1] – 1b = lower critical threshold
[0] – 1b = lower non- critical threshold
3
Lower non-critical threshold
4
Lower critical threshold
5
Lower non-recoverable threshold
6
Upper non-critical threshold
7
Upper critical threshold
8
Upper non-recoverable threshold
Set Sensor Event Enable
cPCI-6S10
ipmitool
Terminal
mode
Description This command is use to enable sensor events.
ipmitool [parameters] raw 0x04 0x28 0x01 0xd0 0x30 0x0c 0x00
0x00
[10 00 28 01 d0 03 0C 00 00]
Example: Enable sensor 1’s assertion for lower non-recoverable
going high, and assertion event for upper non-recoverable going
high.
[10 00 28 01 d0 20 08 00 00]
Hardware Platform Management 39
Page 50
Request Fields
1
Sensor number( FFh = reserved)
2 [7] – 0b = disable all event message from this sensor
[6] – 0b = disable scanning on this sensor
[5:4] – 00b = do not change individual enables
01h = enable selected event messages
10b = disable selected event messages
11b = reserved
3 For sensors with threshold based events:
[7] – 1b = select assertion event for upper non-critical going high
[6] – 1b = select assertion event for upper non-critical going low
[5] – 1b = select assertion event for lower non-recoverable going high
[4] – 1b = select assertion event for lower non-recoverable going low
[3] – 1b = select assertion event for lower critical going high
[2] – 1b = select assertion event for lower critical going low
[1] – 1b = select assertion event for lower non-critical going high
[0] – 1b = select assertion event for lower non-critical going low
For Sensors with discrete event:
[7] – 1b = select assertion event for state bit 7
[6] – 1b = select assertion event for state bit 6
[5 – 1b = select assertion event for state bit 5
[4] – 1b = select assertion event for state bit 4
[3] – 1b = select assertion event for state bit 3
[2] – 1b = select assertion event for state bit 2
[1] – 1b = select assertion event for state bit 1
[0] – 1b = select assertion event for state bit 0
40 Hardware Platform Management
Page 51

4 For sensors with threshold base events:
[7:4] – reserved.
[3] – 1b = select assertion event for upper non-recoverable going high
[2] – 1b = select assertion event for upper non-recoverable going low
[1] – 1b = select assertion event for upper critical going high
[0] – 1b = select assertion event for upper critical going low
For sensors with discrete events:
[7] – reserved
[6] – 1b = select assertion event for state bit 14
[5] – 1b = select assertion event for state bit 13
[4] – 1b = select assertion event for state bit 12
[3] – 1b = select assertion event for state bit 11
[2] – 1b = select assertion event for state bit 10
[1] – 1b = select assertion event for state bit 9
[0] – 1b = select assertion event for state bit 8
5 For sensors with threshold based events:
[7] – 1b = select deassertion event for upper non-critical going high
[6] – 1b = select deassertion event for upper non-critical going low
[5] – 1b = select deassertion event for lower non-recoverable going high
[4] – 1b = select deassertion event for lower non-recoverable going low
[3] – 1b = select deassertion event for lower critical going high
[2] – 1b = select deassertion event for lower critical going low
[1] – 1b = select deassertion event for lower non-critical going high
[0] – 1b = select deassertion event for lower non-critical going low
cPCI-6S10
For Sensors with discrete event:
[7] – 1b = select deassertion event for state bit 7
[6] – 1b = select deassertion event for state bit 6
[5] – 1b = select deassertion event for state bit 5
[4] – 1b = select deassertion event for state bit 4
[3] – 1b = select deassertion event for state bit 3
[2] – 1b = select deassertion event for state bit 2
[1] – 1b = select deassertion event for state bit 1
[0] – 1b = select deassertion event for state bit 0
Hardware Platform Management 41
Page 52

6 For sensors with threshold base events:
[7:4] – reserved.
[3] – 1b = select deassertion event for upper non-recoverable going high
[2] – 1b = select deassertion event for upper non-recoverable going low
[1] – 1b = select deassertion event for upper critical going high
[0] – 1b = select deassertion event for upper critical going low
For sensors with discrete events:
[7] – reserved
[6] – 1b = select deassertion event for state bi t 14
[5] – 1b = select deassertion event for state bi t 13
[4] – 1b = select deassertion event for state bi t 12
[3] – 1b = select deassertion event for state bi t 11
[2] – 1b = select deassertion event for state bi t 10
[1] – 1b = select deassertion event for state bi t 9
[0] – 1b = select deassertion event for state bi t 8
Response Fields
1
Completion code
Get Sensor Event Enable
ipmitool ipmitool [parameters] sensor get <id>
Terminal
mode
Description
[10 00 28 01 00 00 00]
This command is used to get which sensor event is enable or no.
We can use ipmitool to get this information.
42 Hardware Platform Management
Page 53

Example:
root@BCNMB-A:~# ipmitool -I lan -H 172.20.5.225
-U admin -P admin sensor get "56150_TEMP "
Locating sensor record...
Sensor ID : 56150_TEMP (0x8)
Entity ID : 160.96
Sensor Type (Analog) : Temperature
Sensor Reading : 67 (+/- 0) degrees C
Status : Upper Non-Critical
Lower Non-Recoverable : na
Lower Critical : na
Lower Non-Critical : na
Upper Non-Critical : 60.000
Upper Critical : 75.000
Upper Non-Recoverable : 88.000
Assertion Events : unc+
Deassertion Events : lnc- lnc+ lcr- lcr+
lnr- lnr+ unc- ucr- ucr+ unr- unr+
Assertions Enabled : unc+ ucr+ unr+
Deassertions Enabled : unc+ ucr+ unr+
Request Fields
cPCI-6S10
1
Sensor number( FFh = reserved)
Response Fields
1
Completion code
2 [7] – 0b = All event messages disabled form this sensor
[6] – 0b = Sensor scanning disabled
[5:0] - reserved
Hardware Platform Management 43
Page 54

3 For sensors with threshold based events:
[7] – 1b = select assertion event for upper non-critical going high
[6] – 1b = select assertion event for upper non-critical going low
[5] – 1b = select assertion event for lower non-recoverable going high
[4] – 1b = select assertion event for lower non-recoverable going low
[3] – 1b = select assertion event for lower critical going high
[2] – 1b = select assertion event for lower critical going low
[1] – 1b = select assertion event for lower non-critical going high
[0] – 1b = select assertion event for lower non-critical going low
For Sensors with discrete event:
[7] – 1b = select assertion event for state bit 7
[6] – 1b = select assertion event for state bit 6
[5 – 1b = select assertion event for state bit 5
[4] – 1b = select assertion event for state bit 4
[3] – 1b = select assertion event for state bit 3
[2] – 1b = select assertion event for state bit 2
[1] – 1b = select assertion event for state bit 1
[0] – 1b = select assertion event for state bit 0
4 For sensors with threshold base events:
[7:4] – reserved.
[3] – 1b = select assertion event for upper non-recoverable going high
[2] – 1b = select assertion event for upper non-recoverable going low
[1] – 1b = select assertion event for upper critical going high
[0] – 1b = select assertion event for upper critical going low
For sensors with discrete events:
[7] – reserved
[6] – 1b = select assertion event for state bit 14
[5] – 1b = select assertion event for state bit 13
[4] – 1b = select assertion event for state bit 12
[3] – 1b = select assertion event for state bit 11
[2] – 1b = select assertion event for state bit 10
[1] – 1b = select assertion event for state bit 9
[0] – 1b = select assertion event for state bit 8
44 Hardware Platform Management
Page 55

5 For sensors with threshold based events:
[7] – 1b = select deassertion event for upper non-critical going high
[6] – 1b = select deassertion event for upper non-critical going low
[5] – 1b = select deassertion event for lower non-recoverable going high
[4] – 1b = select deassertion event for lower non-recoverable going low
[3] – 1b = select deassertion event for lower critical going high
[2] – 1b = select deassertion event for lower critical going low
[1] – 1b = select deassertion event for lower non-critical going high
[0] – 1b = select deassertion event for lower non-critical going low
For Sensors with discrete event:
[7] – 1b = select deassertion event for state bit 7
[6] – 1b = select deassertion event for state bit 6
[5] – 1b = select deassertion event for state bit 5
[4] – 1b = select deassertion event for state bit 4
[3] – 1b = select deassertion event for state bit 3
[2] – 1b = select deassertion event for state bit 2
[1] – 1b = select deassertion event for state bit 1
[0] – 1b = select deassertion event for state bit 0
6 For sensors with threshold base events:
[7:4] – reserved.
[3] – 1b = select deassertion event for upper non-recoverable going high
[2] – 1b = select deassertion event for upper non-recoverable going low
[1] – 1b = select deassertion event for upper critical going high
[0] – 1b = select deassertion event for upper critical going low
cPCI-6S10
For sensors with discrete events:
[7] – reserved
[6] – 1b = select deassertion event for state bit 14
[5] – 1b = select deassertion event for state bit 13
[4] – 1b = select deassertion event for state bit 12
[3] – 1b = select deassertion event for state bit 11
[2] – 1b = select deassertion event for state bit 10
[1] – 1b = select deassertion event for state bit 9
[0] – 1b = select deassertion event for state bit 8
Hardware Platform Management 45
Page 56

Re-arm Sensor Event
ipmitool ipmitool [parameters] raw 0x04 0x2a 0x01 0x00
Terminal
mode
Description This command is used to re-arm a sensor.
[10 00 2a 01 00]
Request Fields
1
sensor number (FFh = reserved)
2 [7] - 0b = re-arm all event status from this sensor. If 0, following
parameter
bytes are ignored, but should still be written as 0, if sent.
[6:0] - reserved. Write as 000_0000b.
(3)* For sensors with threshold based events:
[7] - 1b = re-arm assertion event for upper non-critical going high
[6] - 1b = re-arm assertion event for upper non-critical going low
[5] - 1b = re-arm assertion event for lower non-recoverable going
high
[4] - 1b = re-arm assertion event for lower non-recoverable going low
[3] - 1b = re-arm assertion event for lower critical going high
[2] - 1b = re-arm assertion event for lower critical going low
[1] - 1b = re-arm assertion event for lower non-critical going high
[0] - 1b = re-arm assertion event for lower non-critical going low
For sensors with discrete events :
[7] - 1b = re-arm assertion event for state bit 7
[6] - 1b = re-arm assertion event for state bit 6
[5] - 1b = re-arm assertion event for state bit 5
[4] - 1b = re-arm assertion event for state bit 4
[3] - 1b = re-arm assertion event for state bit 3
[2] - 1b = re-arm assertion event for state bit 2
[1] - 1b = re-arm assertion event for state bit 1
[0] - 1b = re-arm assertion event for state bit 0
46 Hardware Platform Management
Page 57

(4)* For sensors with threshold based events:
[7:4] - reserved. Write as 0000b.
[3] - 1b = re-arm assertion event for upper non-recoverable going
high
[2] - 1b = re-arm assertion event for upper non-recoverable going
low
[1] - 1b = re-arm assertion event for upper critical going high
[0] - 1b = re-arm assertion event for upper critical going low
For sensors with discrete events:
(00h otherwise)
[7] - reserved. Ignore on read.
[6] - 1b = re-arm assertion event for state bit 14
[5] - 1b = re-arm assertion event for state bit 13
[4] - 1b = re-arm assertion event for state bit 12
[3] - 1b = re-arm assertion event for state bit 11
[2] - 1b = re-arm assertion event for state bit 10
[1] - 1b = re-arm assertion event for state bit 9
[0] - 1b = re-arm assertion event for state bit 8
(5)* For sensors with threshold based events:
[7] - 1b = re-arm deassertion event for upper non-critical going high
[6] - 1b = re-arm deassertion event for upper non-critical going low
[5] - 1b = re-arm deassertion event for lower non-recoverable going
high
[4] - 1b = re-arm deassertion event for lower non-recoverable going
low
[3] - 1b = re-arm deassertion event for lower critical going high
[2] - 1b = re-arm deassertion event for lower critical going low
[1] - 1b = re-arm deassertion event for lower non-critical going high
[0] - 1b = re-arm deassertion event for lower non-critical going low
For sensors with discrete events:
(00h otherwise)
[7] - 1b = re-arm deassertion event for state bit 7
[6] - 1b = re-arm deassertion event for state bit 6
[5] - 1b = re-arm deassertion event for state bit 5
[4] - 1b = re-arm deassertion event for state bit 4
[3] - 1b = re-arm deassertion event for state bit 3
[2] - 1b = re-arm deassertion event for state bit 2
[1] - 1b = re-arm deassertion event for state bit 1
[0] - 1b = re-arm deassertion event for state bit 0
cPCI-6S10
Hardware Platform Management 47
Page 58
(6)* For sensors with threshold based events:
[7:4] - reserved. Write as 0000b.
[3] - 1b = re-arm deassertion event for upper non-recoverable going
high
[2] - 1b = re-arm deassertion event for upper non-recoverable going
low
[1] - 1b = re-arm deassertion event for upper critical going high
[0] - 1b = re-arm deassertion event for upper critic al go i ng lo w
For sensors with discrete events :
(00h otherwise)
[7] - reserved. Ignore on read.
[6] - 1b = re-arm deassertion event for state bit 14
[5] - 1b = re-arm deassertion event for state bit 13
[4] - 1b = re-arm deassertion event for state bit 12
[3] - 1b = re-arm deassertion event for state bit 11
[2] - 1b = re-arm deassertion event for state bit 10
[1] - 1b = re-arm deassertion event for state bit 9
[0] - 1b = re-arm deassertion event for state bit 8
Response Fields
1
Completion code
Get Sensor Reading
ipmitool ipmitool [parameters] sensor get <id>
Terminal
mode
Description
[10 00 2d 01]
This command is used to get sensor reading.
We can use ipmitool to read each sensor’s reading value.
Example: Get Tmp421 sensor reading
48 Hardware Platform Management
Page 59

root@BCNMB-A:~# ipmitool -I lan -H 172.20.5.225
-U admin -P admin sensor get "56150_TEMP "
Locating sensor record...
Sensor ID : 56150_TEMP (0x8)
Entity ID : 160.96
Sensor Type (Analog) : Temperature
Sensor Reading : 67 (+/- 0) degrees C
Status : Upper Non-Critical
Lower Non-Recoverable : na
Lower Critical : na
Lower Non-Critical : na
Upper Non-Critical : 60.000
Upper Critical : 75.000
Upper Non-Recoverable : 88.000
Assertion Events : unc+
Deassertion Events : lnc- lnc+ lcr- lcr+
lnr- lnr+ unc- ucr- ucr+ unr- unr+
Assertions Enabled : unc+ ucr+ unr+
Deassertions Enabled : unc+ ucr+ unr+
Request Fields
cPCI-6S10
1
Sensor number( FFh = reserved)
Response Fields
1
Completion code
2
Sensor reading
3 [7] – 0b = all event messages disabled form this sensor
[6] – 0b = sensor scaling disabled
[5] – 1b = reading/state unavailable
[4:0] – reserved
Hardware Platform Management 49
Page 60
4 For threshold-base sensors
Present threshold comparison status
[7:6] – reserved
[5] – 1b = at or above (>=) upper non-recoverable threshold
[4] – 1b = at or above (>=) upper critical threshold
[3] – 1b = at or above (>=) upper non- critical threshold
[2] – 1b = at or above (<=) lower non- recoverable threshold
[1] – 1b = at or above (<=)lower critical threshold
[0] – 1b = at or above (<=)lower non- critical threshold
For discrete reading sensors
[7] – 1b = state 7 asserted
[6] – 1b = state 6 asserted
[5] – 1b = state 5 asserted
[4] – 1b = state 4 asserted
[3] – 1b = state 3 asserted
[2] – 1b = state 2 asserted
[1] – 1b = state 1 asserted
[0] – 1b = state 0 asserted
5 For discrete reading sensors only( optional)
[7] – reserved
[6] – 1b = state 14 asserted
[5] – 1b = state 13 asserted
[4] – 1b = state 12 asserted
[3] – 1b = state 11 asserted
[2] – 1b = state 10 asserted
[1] – 1b = state 9 asserted
[0] – 1b = state 8 asserted
Get Sensor Type
ipmitool ipmitool [parameters] sensor get <id>
Terminal
mode
Description
50 Hardware Platform Management
[10 00 2F 00]
This command is used to get sensor type.
We can use ipmitool to get this information
Page 61

Example:
root@BCNMB-A:~# ipmitool -I lan -H 172.20.5.226
-U admin -P admin sensor get "P1V "
Locating sensor record...
Sensor ID : P1V (0x2)
Entity ID : 3.96
Sensor Type (Analog) : Voltage
Sensor Reading : 1.005 (+/- 0) Volts
Status : ok
Lower Non-Recoverable : 0.945
Lower Critical : 0.965
Lower Non-Critical : 0.985
Upper Non-Critical : 1.105
Upper Critical : 1.125
Upper Non-Recoverable : 1.155
Assertion Events : lnc- lcr Deassertion Events : lnc+ lcr+ lnr- lnr+
unc- unc+ ucr- ucr+ unr- unr+
Assertions Enabled : lnc- lcr- lnr- unc+
ucr+ unr+
Deassertions Enabled : lnc- lcr- lnr- unc+
ucr+ unr+
Request Fields
cPCI-6S10
1
Sensor number( FFh = reserved)
Response Fields
1
Completion code
2
Sensor type
3 [7] – reserved
[6:0] – Event/Reading type code
Hardware Platform Management 51
Page 62

Get FRU Inventory Area Info
ipmitool Ipmitool [parameters] raw 0x0A 0x10 0x00
Terminal
mode
Description Get FRU inventory area info
Request Fields
1 FRU Device ID. ( FFh = reserved)
0 – CMM
32h – PSU1
33h – PSU2
Response Fields
1
Completion code
2
FRU inventory area size in bytes, LS byte
3
FRU inventory area size in bytes, MS byte
4 [7:1] – reserved
[0] – 0b = device is accessed by bytes
1b = device is accessed by words
Note: The command “Get FRU inventory area info” and “Read
FRU data” support customized design on this platform for PSU
FRU eeprom re-direction. However, “write FRU data” is not
acceptable for PSU.
[28 00 10 00]
Read FRU Data
ipmitool Ipmitool [parameters] raw 0x0A 0x11 0x00 0x00 0x00 0x08
Terminal
mode
Description Read FRU data
52 Hardware Platform Management
[28 00 11 00 00 00 08]
Page 63

cPCI-6S10
IPMItool Support:
IPMItool supports “read entire fru record” command. We can use
below command to get entire fru command:
ipmitool fru read 0 fru-data.bin
Then fru with id 0 will save to file fru-data.bin
Example:
IPMC
root@BCNMB-A:~# ipmitool fru read 0
fru-data.bin
Fru Size : 512 bytes
Done
We can print all fru:
root@BCNMB-A:~# ipmitool fru
Board Mfg Date : Tue Sep 16 20:00:00 2014
Board Mfg : ADLINK Technology
Board Product : cPCI-6S10
Board Serial : ADLINK-XXXX-XXXX
Board Part Number : cPCI-6S10
Product Manufacturer: ADLINK Technology
Product Name : cPCI-6S10
Product Part Number : cPCI-6S10
Product Version : A2
Product Serial : ADLINK-XXXX-XXXX
Product Asset Tag : N/A
Request Fields
1 FRU Device ID. ( FFh = reserved)
0 – CMM
32h – PSU1
33h – PSU2
2
FRU inventory offset to read, LS Byte
3
FRU inventory offset to read, MS Byte
4
Count to read – count is ‘1’ based
Hardware Platform Management 53
Page 64

Response Fields
1
Completion code
2
Count returned – count is ‘1’ based
3:2+N
Requested data
Note: The command “Get FRU inventory area info” and “Read
FRU data” support customized design on this platform for PSU
FRU eeprom re-direction. However, “write FRU data” is not
acceptable for PSUs.
[root@iProc /root]# ipmitool -I lan -H 127.0.0.1
-U admin -P admin raw 0xa 0x11 0x0 0x0 0x0
8
08 01 00 01 0c 13 19 00 c6
Write FRU Data
ipmitool Ipmitool [parameters] raw 0x0A 0x12 0x00 0x00 0x00 0x01
Terminal
mode
Description
[28 00 12 00 00 00 01]
This command is used to write raw FRU data to eeprom.
We can use ipmitool to write data more easy.
IPMItool Support:
We can use ipmitool to write entire FRU record.
ipmitool fru write 0 fru-data.bin
Additionally, we can write raw data to eeprom:
ipmitool fru 0 field <section> <index> <string>
<section>: is a string which refers to FRU
Inventory Information
Storage Areas and may be referring to:
c FRU Inventory Chassis Info Area
b FRU Inventory Board Info Area
p FRU Inventory Product Info Area
<index>: specifies the field number. Field
numbering starts on the first ’English text’
54 Hardware Platform Management
Page 65

field type. For instance in the <board> info
area field ’0’ is <Board Manufacturer> and
field ’2’ is <Board Serial Number>; see IPMI
Platform Management FRU Information Storage
Definition v1.0 R1.1 for field locations.
<string> must be the same length as the string
being replaced and must be 8-bit ASCII
(0xCx).
Request Fields
1
FRU Device ID. ( FFh = reserved)
2
FRU inventory offset to read, LS Byte
3
FRU inventory offset to read, MS Byte
4:3+N
Data to write
Response Fields
1
Completion code
2
Count written – count is 1 based
cPCI-6S10
Get SDR Repository Info
ipmitool ipmitool [parameters] sdr info
Terminal
mode
Description Get SDR repository information
Hardware Platform Management 55
[28 00 20]
Page 66

root@BCNMB-A:~# ipmitool -I lan -H 127.0.0.1 -U
admin -P admin sdr info
SDR Version : 0x51
Record Count : 117
Free Space : 33016 bytes
Most recent Addition :
Most recent Erase :
SDR overflow : no
SDR Repository Update Support : non-modal
Delete SDR supported : yes
Partial Add SDR supported : yes
Reserve SDR repository supported : yes
SDR Repository Alloc info supported : yes
Response Fields
1
Completion code
2 SDR Version - version number of the SDR command set for the SDR
Device.
51h for this specification. (BCD encoded with bits 7:4 holding the Least
Significant digit of the revision and bits 3:0 holding the Most Significant
bits.)
3
Record count LS Byte - number of records in the SDR Repository
4
Record count MS Byte - number of records in the SDR Repository
5:6 Free Space in bytes, LS Byte first. 0000h indicates ‘full’, FFFEh
indicates
64KB-2 or more available. FFFFh indicates ‘unspecified’.
7:10
Most recent addition timestamp. LS byte first.
11:14
Most recent erase (delete or clear) timestamp. LS byte first.
56 Hardware Platform Management
Page 67

15 Operation Support
[7] - Overflow Flag. 1=SDR could not be written due to lack of space in
the
SDR Repository.
[6:5] - 00b = modal/non-modal SDR Repository Update operation
unspecified
01b = non-modal SDR Repository Update operation supported
10b = modal SDR Repository Update operation supported
11b = both modal and non-modal SDR Repository Update supported
[4] - reserved. Write as 0b
[3] - 1b=Delete SDR command supported
[2] - 1b=Partial Add SDR command supported
[1] - 1b=Reserve SDR Repository command supported
[0] - 1b=Get SDR Repository Allocation Information command
supported
Get SDR
ipmitool Ipmitool [parameters] raw 0xa 0x23
Terminal
mode
Description
[28 00 23]
Get a SDR record from repository
If get a partial SDR record, user should call “Reserve SDR
repository” to get a valid reservation id.
A partial get command means offset is not 0 or length is not 0xff.
A record id with 0x0000 is first record.
If a MC support both “Sensor Device” and “SDR repository
device”, “SDR repository device” will has been used first.
Ipmitool will check “Get_device_id” command to decide use
which SDR source.
cPCI-6S10
Hardware Platform Management 57
Page 68

Example:
Get SDR use raw command.
root@BCNMB-A:~# ipmitool -I lan -H 127.0.0.1 -U
admin -P admin raw 0xa 0x22
06 00
root@BCNMB-A:~# ipmitool -I lan -H 127.0.0.1 -U
admin -P admin raw 0xa 0x23 0x6 0x0 0 0 0
10
01 00 00 00 51 12 13 20 00 cc 29 00
List all SDR from IPMC (from Device SDR)
root@BCNMB-A:~# ipmitool -I lan -H 172.20.5.225
-U admin -P admin -t 0xB4 sdr list all
BMC_WatchDog | 0 unspecified | nc
POWER_GOOD | 0 unspecified | cr
P1V | 1.01 Volts | ok
P1V2 | 1.20 Volts | ok
P1V5 | 1.50 Volts | ok
P0V75 | 0.74 Volts | ok
+3.3V | 3.32 Volts | ok
+5.0V | 5.05 Volts | ok
54685_TEMP | 34 degrees C | ok
56150_TEMP | 47 degrees C | ok
Request Fields
1 Reservation ID. LS Byte. Only requi red for partial reads with a non-
zero ‘Offset into record’ field. Use 0000h for reservation ID
otherwise.
2
Reservation ID. MS Byte.
3
Record ID of record to Get, LS Byte
4
Record ID of record to Get, MS Byte
5
Offset into record
6
Bytes to read. FFh means read entire record.
58 Hardware Platform Management
Page 69

Response Fields
1
Completion code
2
Record ID for next record, LS Byte
3
Record ID for next record, MS Byte
4:N
Record Data
3.3 Controller Specific OEM/Group Commands
Show Card Version
ipmitool ipmitool [parameters] raw 0x30 0x12
Terminal
mode
Description Show 6S10 Card Version.
Request Data Fields
1
None
[C0 00 12]
cPCI-6S10
Response Data Fields
1
Completion Code
2
Predefined – A5h
3
‘V’– 56h (Version)
4
APP_FIRMWARE_REV (MSB)
5
APP_FIRMWARE_REV (LSB)
6
‘P’ –50h (Product)
7
APP_PRODUCT_ID(MSB)
8
APP_PRODUCT_ID(LSB)
9
‘S’ –53h
10
Reserved – 00h
Hardware Platform Management 59
Page 70

11
Predefined – 5Ah
Example:
Show Card Version
[root@iProc /root]#ipmitool raw 0x30 0x12
a5 56 01 02 50 53 13 53 00 5a
Re-Scan GA Input
ipmitool ipmitool [parameters] raw 0x30 0x22
Terminal
mode
Description Re-Scan the IPMB address from the HW GA Input
Example:
Use this command to read the Card’s IPMB address.
Request Data Fields
1
None
[C0 00 22]
[root@iProc /root]#ipmitool raw 0x30 0x22
b8
Response Data Fields
1
Completion Code
2
IPMB Address – xxh
Report Geography Address
ipmitool
Terminal
mode
description Get 6S10 Geography Address.
60 Hardware Platform Management
ipmitool [parameters] raw 0x30 0xF0
[C0 00 F0]
Page 71

Example:
Use this command to read the Card’s IPMB and Geography
Address.
[root@iProc /root]#ipmitool raw 0x30 0xF0
b8 03 01
Request Data Fields
1
None
Response Data Fields
1
Completion Code
2
IPMB Address – xxh
3
Geography Address – xxh
4
Reserved – 01h
Payload Power Reset
ipmitool ipmitool [parameters] raw 0x30 0xF5
Terminal
mode
Description Reset the Payload when it is in PowerOn state.
[C0 00 F5]
cPCI-6S10
Request Data Fields
1
None
Response Data Fields
1
Completion Code
2
None
Hardware Platform Management 61
Page 72

Power Off the Payload
ipmitool Ipmitool [parameters] raw 0x30 0xF6
Terminal
mode
Description Power Off the Payload.
[C0 00 F6]
Request Data Fields
1
None
Response Data Fields
1
Completion Code
Power On the Payload
ipmitool Ipmitool [parameters] raw 0x30 0xF7
Terminal
mode
Description Power On the Payload.
Request Data Fields
[C0 00 F7]
1
None
Response Data Fields
1
Completion Code
62 Hardware Platform Management
Page 73

Set Boot Flash
ipmitool Ipmitool [parameters] raw 0x30 0x15 0x0
Terminal
mode
Description Set the Boot Flash.
[C0 00 15 00]
Request Data Fields
1
Boot flash number – 0 (Flash #0)/1 (Flash #1)
Response Data Fields
1
Completion Code
Note: This command will not change the physical boot flash CS#
signal until a power-off cycle done.
Get Boot Flash
ipmitool Ipmitool [parameters] raw 0x30 0x16
Terminal
mode
Description Get the Boot Flash No.
[C0 00 16]
cPCI-6S10
Request Data Fields
1
None
Response Data Fields
1
Completion Code
2
Boot flash number – 0/1
Hardware Platform Management 63
Page 74

This page intentionally left blank.
64 Hardware Platform Management
Page 75

4 Getting Started
This chapter describes the installation of the cPCI-6S10:
4.1 Heatsink
The cPCI-6S10 comes with on board BGA BCM 56150 processor
and heatsink pre-installed. Removal of heatsink/CPU by users is not
recommended. Please contact your ADLINK service representative
for assistance.
Handle with caution as the heat sink can get very hot. Do not
touch the heat sink when installing or removing the board. The
CAUTION:
4.2 Installing the cPCI-6S10
Insert the cPCI-6S10 into a PICMG 2.16 backplane with a fabric
slot. The symbol for the switch slot is
board should not be placed on any surface or in any form of
storage container until the board and heat sink have cooled
down to room temperature.
cPCI-6S10
4.3 C onfiguring the cPCI-6S10
There is a serial port and management port at the front panel of
the cPCI-6S10. Both ports can be used to connect to the
cPCI-6S10 console. Follow the steps below.
User's can connect to the cPCI-6S10 console using "PuTTY".
Download PuTTY from http://www.putty.org. Run the program to
open the PuTTY configuration window.
Serial Port Connection
Connect the RJ-45 to DB-9 adapter cable to the COM port on the
front panel. Set "Serial line" to the COM port of the client PC.
Getting Started 65
Page 76
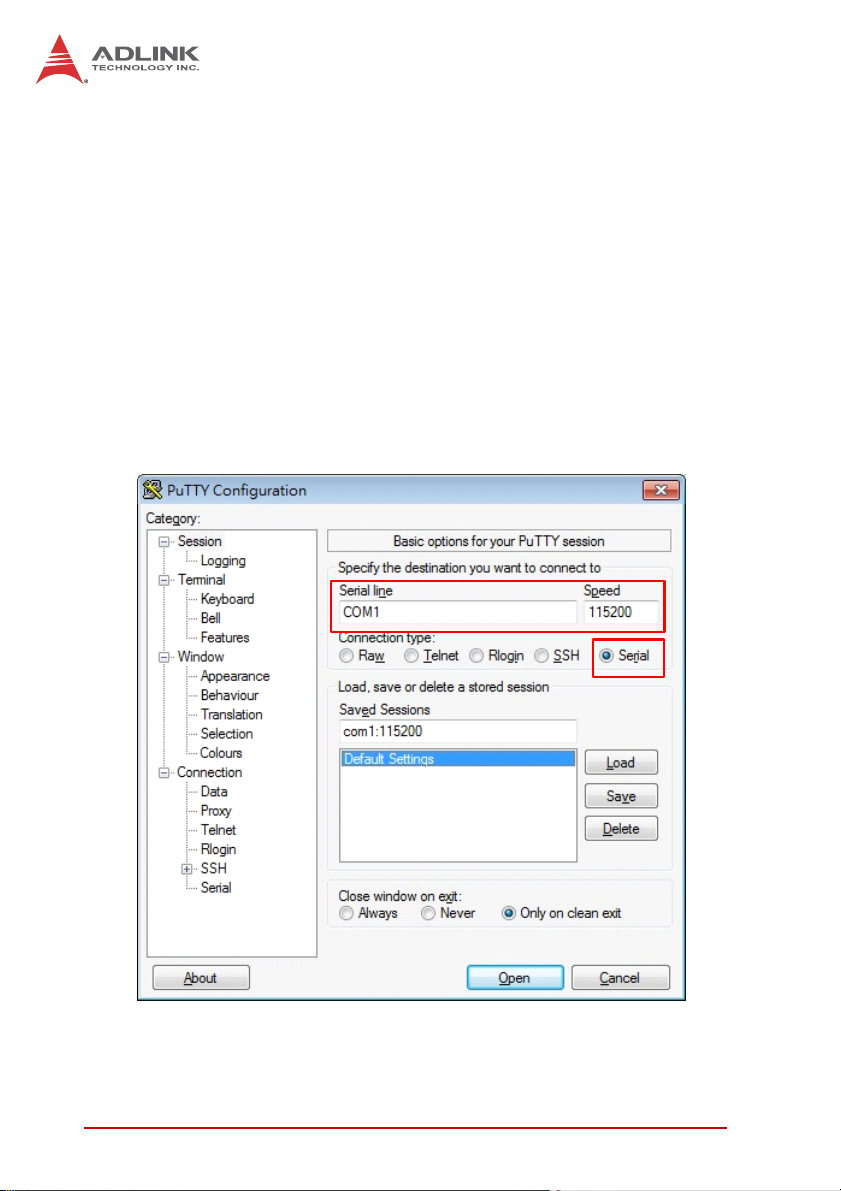
To connect to the cPCI-6S10 local management processor
(LMP) console:
X Set SW21 on the cPCI-6S10 to "Console port to BCM56150":
1, 2 On; 3, 4 Off; see “Console Port Switch (SW21)” on
page 18
X Enter the following settings into the PuTTY Configuration
window:
Z Speed: 115200
Z Parity bit: None
Z Flow Control: None
Z All others settings default
X Click "Open" to open the PuTTY command line interface
66 Getting Started
Page 77

cPCI-6S10
To connect to the cPCI-6S10 IPMC debug serial port:
X Set the SW21 the cPCI-6S10 to "Console port to IPMC":
1,2 Off; 3, 4 On; see “Console Port Switch (SW21)” on
page 18
X Enter the following settings into the PuTTY Configuration
window:
Z Speed: 9600
Z Parity bit: None
Z Flow Control: None
Z All others settings default
X Click "Open" to open the PuTTY command line interface
Getting Started 67
Page 78

After powering on the cPCI-6S10, the terminal program PuTTY will
connect to the switch blade via the COM port. Login with the following:
User: root
No Password
68 Getting Started
Page 79

cPCI-6S10
LAN Port Connection
Connect the client computer to the Management port on the front
panel with an RJ-45 cable.
Set the client computer IP to 192.168.7.10.
Getting Started 69
Page 80

In the PuTTY configuration window, set “Connection type” to
“SSH”. Set the host IP to 192.168.7.101, Port 22.
Login as follows:
User: root
No Password
70 Getting Started
Page 81

cPCI-6S10
Login to the Broadcom Shell
Users can login to the Broadcom shell by connecting to LAN port
or serial port. The application "/usr/local/bcm/bcm.user" is the
complete BCM command shell. This includes the BCM shell application as well as the BCM API and all drivers. All BCM SDK
related files are stored in the directory "/usr/local/bcm/", and the
startup script is "/etc/init.d/S70bcm".
After Linux has started, it runs bcm.user in background mode and
listens to port 9895. Users can en ter the BCM shell by using the
following command:
telnet localhost 9895
In the CLI, typing "quit" will close the telnet connection, but will not
terminate the bcm.user proces s.
When bcm.user is started, it clears all Ethernet switch settings.
Meanwhile, the shell executes the startup script
"/usr/local/bcm/rc.soc". The system administrator can customize
the startup script and add initialization command sequences as
required.
On the cPCI-6S10, another script file
"/usr/local/bcm/customer_config.soc" is used to include special
configurations for the board. It is executed as the last part of
"/usr/local/bcm/rc.soc".
# customer extra configurations after SDK init.
/usr/local/bcm/customer_config.soc
# ADLINK. Switch LED to Serial2Parallel mode.
setreg top_parallel_led_ctrl 0x3ff00
# ADLINK. Restart LEDuP to load program.
led stop
led load /usr/local/bcm/cpci-6s10_led_0.hex
led auto on
led start
# ADLINK. 54685 LED select & act set.
phy ge16 0x1c 0xb430
phy ge17 0x1c 0xb430
phy ge18 0x1c 0xb430
phy ge19 0x1c 0xb430
Getting Started 71
Page 82

phy ge20 0x1c 0xb430
phy ge21 0x1c 0xb430
phy ge22 0x1c 0xb430
phy ge23 0x1c 0xb430
phy ge16 0x10 0
phy ge17 0x10 0
phy ge18 0x10 0
phy ge19 0x10 0
phy ge20 0x10 0
phy ge21 0x10 0
phy ge22 0x10 0
phy ge23 0x10 0
# Set xe0 and xe2 as SFI
port xe0,xe2 if=sfi an=off speed=10000
# Disable flow control
port ge rpau=off tpau=off
port xe rpau=off tpau=off
The example script reads parameters from "/usr/local/bcm/config.bcm.cpci-6s10". This config file contains most of the PHY
addresses.
/usr/local/bcm/config.bcm.cpci-6s10
obcm5615x_config=0
os=unix
pbmp_xport_xe.0=0x3c000000
phy_port_primary_and_offset_ge8=0x0a00
phy_port_primary_and_offset_ge9=0x0a01
phy_port_primary_and_offset_ge10=0x0a02
phy_port_primary_and_offset_ge11=0x0a03
phy_port_primary_and_offset_ge12=0x0a04
phy_port_primary_and_offset_ge13=0x0a05
phy_port_primary_and_offset_ge14=0x0a06
phy_port_primary_and_offset_ge15=0x0a07
phy_port_primary_and_offset_ge16=0x1200
phy_port_primary_and_offset_ge17=0x1201
phy_port_primary_and_offset_ge18=0x1202
phy_port_primary_and_offset_ge19=0x1203
phy_port_primary_and_offset_ge20=0x1204
phy_port_primary_and_offset_ge21=0x1205
phy_port_primary_and_offset_ge22=0x1206
72 Getting Started
Page 83

phy_port_primary_and_offset_ge23=0x1207
phy_port_primary_and_offset_ge0=0x0207
phy_port_primary_and_offset_ge1=0x0206
phy_port_primary_and_offset_ge2=0x0205
phy_port_primary_and_offset_ge3=0x0204
phy_port_primary_and_offset_ge4=0x0203
phy_port_primary_and_offset_ge5=0x0202
phy_port_primary_and_offset_ge6=0x0201
phy_port_primary_and_offset_ge7=0x0200
# 54685 phy address
port_phy_addr_ge16=0x11
port_phy_addr_ge17=0x12
port_phy_addr_ge18=0x13
port_phy_addr_ge19=0x14
port_phy_addr_ge20=0x15
port_phy_addr_ge21=0x16
port_phy_addr_ge22=0x17
port_phy_addr_ge23=0x18
# 84752 phy address
phy_84752=1
phy_ext_rom_boot=0
port_phy_addr_xe0=0x3e
port_phy_addr_xe2=0x3f
cPCI-6S10
The script "/etc/init.d/S70bcm" controls the execution of the BCM
shell. "/etc/init.d/S70bcm start" launches the shell in background.
This is done automatically every time the cPCI-6S10 boots up.
"/etc/init.d/S70bcm stop" stops the BCM shell.
The commands in the BCM shell are classified into two categories:
general commands for shell and commands for controlling the
Ethernet switch. Refer to the cPCI-6S10 Software User's Manual
for information on the commands used on the cPCI-6S10.
Getting Started 73
Page 84

This page intentionally left blank.
74 Getting Started
Page 85

5 Software Management
5.1 Introduction
cPCI-6S10 board has an Ethernet switch function block integrated
in System-on-a-Chip(SOC) BCM56150 Ethernet controller
processor as the heart of board. Broadcom provides software
package "Broadcom® Network Switching Software SDK". This
Broadcom SDK software enables software development for target
systems using Broadcom switch devices from the StrataSwitch
and StrataXGS families.
The source code provided by Broadcom can be compiled
"out-of-the-box" into fully functional images for any of the
reference platforms and development kits supported by
Broadcom.
The BCM shell is an interactive application running on arm Linux.
It allows users to access registers and memories on the switch
devices and provides a means of higher-level configuration. The
BCM shell has a number of useful capabilities:
X It is a finished, self-contained sample application that
serves as a template for new applications.
X It is an efficient diagnostic tool. Customers may include
access to BCM shell in their systems if they require
extended diagnostics.
X It is a script running application; the SDK includes a number
of sample scripts that the BCM shell can execute. The most
important and widely used is the rc.soc script, which implements a full device initialization sequence.
cPCI-6S10
5.2 Broadcom Network Switching Software SDK
Broadcom Network Switching Software SDK, hereafter referred to
as BCM SDK, stores all related files in the directory
"/usr/local/bcm/". The start-up script is "/etc/init.d/S70bcm". The
complete BCM command shell is located in
"/usr/local/bcm/bcm.user".
Software Management 75
Page 86

bcm.user Application
The bcm.user application is the complete BCM diagnostics shell.
This includes the BCM shell application as well as the BCM API
and complete driver.
It is not necessary to configure the cPCI-6S10 for general purpose packet switching. Incorrect use of following BCM.USER
NOTE:
NOTE:
Building and using this application must always be the first step to
advanceyour system, as it allows you to easily validate the hardware platform and the correct operation of the driver software in
your system. After the linux_kernel_bde.o and linux_user_bde.o
modules have been inserted, and the device file created, you can
run the bcm.user application that provides the BCM> prompt.
NOTE:
NOTE:
bcm.user is launched automatically on the cPCI-6S10 when Linux
boots up. All I/O is redirected to a network socket by “netserver”, a
useful tool provided by Broadcom. The user can keep the SDK
application running in the background and access the diagnostic
shell via telnet when necessary.
command may result in malfunction of the blade. Please contact ADLINK for assistance technical if you are not familiar with
the bcm.user application.
It is recommended that there should be only one running
instance of bcm.user. That means, when bcm.user is running
in background mode (system default), you should not launch
another instance of it.
5.3 Commands
The commands in the BCM shell are classified into two categories.
The first category listed below has general commands for the
shell. The second category contains commands for controlling the
Ethernet switch.
The command syntax is case-insensitive. In the command
descriptions below, each command is composed of upper- and
lower-case characters. The upper-case characters represent the
command abbreviation. For example, the command "ps" is the
abbreviation of the command "PortState".
76 Software Management
Page 87

Commands Common to All Modes
Command Display list of commands
ASSert Assert
BackGround Execute a command in the background.
BCM Set shell mode to BCM.
BCMX Set shell mode to BCMX.
CASE Execute command based on string match
CD Change current working directory
cint Enter the C interpreter
CONFig Configure Management interface
CONSole Control console options
CoPy Copy a file
DATE Set or display current date
DeBug Enable/Disable debug output
DeBugMod Enable/Disable debug output per module
DELAY Put CLI task in a busy-wait loop for some amount of time
DEVice Device add/remove
DISPatch BCM Dispatch control.
Echo Echo command line
EDline Edit file using ancient line editor
EXIT Exit the current shell (and po ssibly reset)
EXPR Evaluate infix expression
FLASHINIT Initialize on board flash as a file system
FLASHSYNC Sync up on board flash with file system
FOR Execute a series of commands in a loop
Help Print this list OR usage for a specific command
HISTory List command history
IF Conditionally execute commands
JOBS List current background jobs
KILL Terminate a background job
LOCal Create/Delete a variable in the local scope
LOG Enable/Disable logging and set log file
LOOP Execute a series of commands in a loop
cPCI-6S10
Software Management 77
Page 88

LS List current directory
MKDIR Make a directory
MODE Set shell mode
MORe Copy a file to the console
MoVe Rename a file on a file system
NOEcho Ignore command line
Pause Pause command processing and wait for input
PRINTENV Display current variable list
PWD Print platform dependent working directory
RCCache Save contents of an rc file in memory
RCLoad Load commands from a file
REBOOT Reboot the processor
RM Remove a file from a file system
RMDIR Remove a directory
SAVE Write data to a file
SET Set various configuration options
SETENV Create/Delete a variable in the global scope
SHell Invoke a system dependent shell
SLeep Suspend the CLI task for specified amount of time
TIME Time the execution of one or more commands
Version Print version and build information
78 Software Management
Page 89

cPCI-6S10
Important Safety Instructions
For user safety, please read and follow all instructions,
WARNINGS, CAUTIONS, and NOTES marked in this manual
and on the associated equipment before handling/operating the
equipment.
X Read these safety instructions carefully.
X Keep this user’s manual for future reference.
X Read the specifications section of this manual for detailed
information on the operating environment of this equipment.
X When installing/mounting or uninstalling/removing
equipment:
Z Turn off power and u nplug any power cords/cables.
X To avoid electrical shock and/or damage to equipment:
Z Keep equipment away from water or liquid sources;
Z Keep equipment away from high heat or high humidity;
Z Keep equipment properly ventilated (do not block or
cover ventilation openings);
Z Make sure to use recommended voltage and powe r
source settings;
Z Always install and operate equipment near an easily
accessible electrical socket-outlet;
Z Secure the power cord (do not place any obje ct on /ove r
the power cord);
Z Only install/attach and operate equipment on stable
surfaces and/or recommended mountings; and,
Z If the equipment will not be used for long periods of time,
turn off and unplug the equipment from its power source.
Important Safety Instructions 79
Page 90

X Never attempt to fix the equipment. Equipmen t sho u ld on ly
be serviced by qualified personnel.
A Lithium-type battery may be provided for uninterrupted, backup
or emergency power.
Risk of explosion if battery is replaced with one of an incorrect
WARNING:
type. Dispose of used batteries appropriately.
X Equipment must be serviced by authorized technicians
when:
Z The power cord or plug is damaged;
Z Liquid has penetrated the equipment;
Z It has been exposed to high humidity/moisture;
Z It is not functioning or does not function according to the
user’s manual;
Z It has been dropped and/or damaged; and/or,
Z It has an obvious sign of breakage.
80 Important Safety Instructions
Page 91

Getting Service
Contact us should you require any service or assistance.
ADLINK Technology, Inc.
Address: 9F, No.166 Jian Yi Road, Zhonghe District
New Taipei City 235, Taiwan
ᄅקؑխࡉ৬ԫሁ 166 ᇆ 9 ᑔ
Tel: +886-2-8226-5877
Fax: +886-2-8226-5717
Email: service@adlinktech.com
Ampro ADLINK Technology, Inc.
Address: 5215 Hellyer Avenue, #110
San Jose, CA 95138, USA
Tel: +1-408-360-0200
Toll Free: +1-800-966-5200 (USA only)
Fax: +1-408-360-0222
Email: info@adlinktech.com
ADLINK Technology (China) Co., Ltd.
Address: Ϟ⍋Ꮦ⌺ϰᮄᓴ∳催⾥ᡔು㢇䏃 300 ো(201203)
300 Fang Chun Rd., Zhangjiang Hi-Tech Park
Pudong New Area, Shanghai, 201203 China
Tel: +86-21-5132-8988
Fax: +86-21-5132-3588
Email: market@adlinktech.com
cPCI-6S10
ADLINK Technology Beijing
Address: ࣫ҀᏖ⍋⎔Ϟഄϰ䏃 1 োⲜ߯ࡼ E ᑻ 801 ᅸ(100085)
Beijing, 100085 China
Tel: +86-10-5885-8666
Fax: +86-10-5885-8626
Email: market@adlinktech.com
ADLINK Technology Shenzhen
Address: ⏅ഇᏖቅ⾥ᡔು催ᮄϗ䘧᭄ᄫᡔᴃು
Tel: +86-755-2643-4858
Fax: +86-755-2664-6353
Email: market@adlinktech.com
LiPPERT ADLINK Technology GmbH
Address: Hans-Thoma-Strasse 11, D-68163
Mannheim, Germany
Tel: +49-621-43214-0
Fax: +49-621 43214-30
Email: emea@adlinktech.com
Rm. 801, Power Creative E, No. 1 Shang Di East Rd.
A1 2 ὐ C (518057)
2F, C Block, Bldg. A1, Cyber-Tech Zone, Gao Xin Ave. Sec. 7
High-Tech Industrial Park S., Shenzhen, 518054 China
Getting Service 81
Page 92
ADLINK Technology, Inc. (French Liaison Office)
Address: 6 allée de Londres, Immeuble Ceylan
91940 Les Ulis, France
Tel: +33 (0) 1 60 12 35 66
Fax: +33 (0) 1 60 12 35 66
Email: france@adlinktech.com
ADLINK Technology Japan Corporation
Address: ͱ101-0045 ᵅҀ䛑ҷ⬄⼲⬄䤯ފ⬎ 3-7-4
Tel: +81-3-4455-3722
Fax: +81-3-5209-6013
Email: japan@adlinktech.com
ADLINK Technology, Inc. (Korean Liaison Office)
Address: 137-881 昢殾柢 昢爎割 昢爎堆嵢 326, 802 (昢爎壟, 微汾瘶捒娯)
Tel: +82-2-2057-0565
Fax: +82-2-2057-0563
Email: korea@adlinktech.com
ADLINK Technology Singapore Pte. Ltd.
Address: 84 Genting Lane #07-02A, Cityneon Design Centre
Tel: +65-6844-2261
Fax: +65-6844-2263
Email: singapore@adlinktech.com
ADLINK Technology Singapore Pte. Ltd. (Indian Liaison Office)
Address: #50-56, First Floor, Spearhead Towers
Malleswaram, Bangalore - 560 055, India
Tel: +91-80-65605817, +91-80-42246107
Fax: +91-80-23464606
Email: india@adlinktech.com
⼲⬄ 374 ɛɳ 4F
KANDA374 Bldg. 4F, 3-7-4 Kanda Kajicho,
Chiyoda-ku, Tokyo 101-0045, Japan
802, Mointer B/D, 326 Seocho-daero, Seocho-Gu,
Seoul 137-881, Korea
Singapore 349584
Margosa Main Road (between 16th/17th Cross)
ADLINK Technology, Inc. (Israeli Liaison Office)
Address: 27 Maskit St., Corex Building
PO Box 12777
Herzliya 4673300, Israel
Tel: +972-54-632-5251
Fax: +972-77-208-0230
Email: israel@adlinktech.com
ADLINK Technology, Inc. (UK Liaison Office)
Tel: +44 774 010 59 65
Email: UK@adlinktech.com
82 Getting Service
 Loading...
Loading...