

Page 1
NuDAQ®
ACL-8111
16-bit High Resolution
Data Acquisition Card
User’s Guide
Recycled Paper
Page 2

Page 3

©Copyright 1995~2001 ADLINK Technology Inc;
All Rights Reserved.
Manual Rev. 2.60: April 28, 2003
Part No: 50-11010-102
The information in this document is subject to change without prior notice in
order to improve reliability, design and function and does not represent a
commitment on the part of the manufacturer.
In no event will the manufacturer be liable for direct, indirect, special,
incidental, or consequential damages arising out of the use or inability to use
the product or documentation, even if advised of the possibility of such
damages.
This document contains proprietary information protected by copyright. All
rights are reserved. No part of this manual may be reproduced by any
mechanical, electronic, or other means in any form without prior written
permission of the manufacturer.
Trademarks
NuDAQ is a registered trademark of ADLINK Technology Inc.,
Other product names mentioned herein are used for identification purposes
only and may be trademarks and/or registered trademarks of their respective
companies.
Page 4
Getting service from ADLINK
Customer Satisfaction is the most important priority for ADLINK Tech Inc. If
you need any help or service, please contact us.
ADLINK Technology Inc.
Web Site http://www.adlinktech.com
Sales & Service Service@adlinktech.com
NuDAQ + USBDAQ + PXI nudaq@adlinktech.com
Technical
Support
TEL +886-2-82265877 FAX +886-2-82265717
Address 9F, No. 166, Jian Yi Road, Chungho City, Taipei, 235 Taiwan.
Please email or FAX us of your detailed information for a prompt, satisfactory
and constant service.
Company/Organization
Contact Person
E-mail Address
Address
Country
TEL FAX
Web Site
Product Model
Environment to Use
Automation automation@adlinktech.com
NuIPC nuipc@adlinktech.com
NuPRO / EBC nupro@adlinktech.com
Detailed Company Information
Questions
OS:
Computer Brand:
M/B: CPU:
Chipset: BIOS:
Video Card:
Network Interface Card:
Other:
Detail Description
Suggestions to ADLINK
Page 5

Table of Contents
Chapter 1 Introduction ..................................................... 1
1.1 Features ................................................................................. 2
1.2 Applications............................................................................ 3
1.3 Specifications ......................................................................... 4
1.4 Software Supporting ..............................................................7
1.4.1 ACLS-DLL2 .........................................................................7
1.4.2 ACLS-LVIEW.......................................................................7
Chapter 2 Installation ....................................................... 8
2.1 Unpacking ..............................................................................9
2.2 What You Have...................................................................... 9
2.3 PCB Layout.......................................................................... 10
2.4 Base Address Setting ..........................................................11
2.5 D/A Reference Voltage Setting ............................................ 13
2.6 Connectors Pin Assignments...............................................14
2.7 Daughter Board Connection ................................................16
2.7.1 Connect with ACLD-9137 ..................................................16
2.7.2 Connect with ACLD-9182 ..................................................16
2.7.3 Connect with ACLD-9185 ..................................................16
2.7.4 Connect with ACLD-9188 ..................................................17
Chapter 3 Registers Format .......................................... 18
3.1 Registers Address Map........................................................ 18
3.2 A/D Data Registers ..............................................................19
3.3 A/D Channel Multiplexer Register........................................ 20
3.4 A/D Input Range Control Register .......................................21
3.5 Mode and Interrupt Control Register ...................................22
3.6 Interrupt Status Register ......................................................23
3.7 Software Trigger Register ....................................................23
3.8 Digital I/O register ................................................................24
3.9 D/A Output Register.............................................................24
Table of Contents • i
Page 6

Chapter 4 Operation Theorem ....................................... 26
4.1 A/D Conversion.................................................................... 26
4.1.1 A/D Conversion Procedure................................................27
4.1.2 A/D Clock Sources (Trigger Modes)..................................27
4.1.3 A/D Data Transfer Modes..................................................29
4.2 D/A Conversion.................................................................... 30
4.3 Digital Input and Output .......................................................32
Chapter 5 C/C++ Library for DOS.................................. 33
5.1 DOS Software Library Installation........................................ 34
5.1.1 Installation .........................................................................34
5.1.2 Running Utility ...................................................................34
5.1.3 Example Programs............................................................34
5.2 _8111_Initial......................................................................... 35
5.3 _8111_Switch_Card_No ...................................................... 36
5.4 _8111_DI..............................................................................37
5.5 _8111_DI _Channel .............................................................38
5.6 _8111_DO............................................................................ 39
5.7 _8111_DA ............................................................................40
5.8 _8111_AD_Set_Channel .....................................................41
5.9 _8111_AD_Set_Gain ........................................................... 42
5.10 _8111_AD_Set_Mode..........................................................43
5.11 _8111_AD_Soft_Trig ...........................................................44
5.12 _8111_AD_Aquire................................................................45
5.13 _8111_CLR_IRQ .................................................................46
5.14 _8111_AD_INT_Start...........................................................47
5.15 _8111_AD_INT_Status ........................................................ 48
5.16 _8111_AD_INT_Stop...........................................................48
5.17 _8111_AD_Timer.................................................................49
Chappter 6 Calibration ................................................... 50
6.1 What do you need................................................................50
6.2 VR Assignments...................................................................51
6.3 D/A Calibration..................................................................... 51
6.4 A/D Calibration..................................................................... 52
Appendix A. Demo. Programs....................................... 53
Warranty Policy .................... Error! Bookmark not defined.
ii • Table of Contents
Page 7
1
Introduction
The ACL-8111 is a multi-function, high performance, and general-purpose
data acquisition card for the IBM Personal Computer and compatible
computers. The registers map is fully compatible with PCL-711B.
The ACL-8111 is designed to combine all the data acquisition functions, such
A/D, D/A, D/O, and D/I in a single board, The high-end specifications of the
card makes it ideal for wide range of applications in industrial and laboratory
automation.
Introduction • 1
Page 8

1.1 Features
The ACL-8111 Enhanced Multi-function Data Acquisition Card provides the
following advanced features:
• 8 single-ended 12-bit analog input channels
• On-chip sample & hold
• Variable input range: ± 5V, ±2.5V, ±1.25V, ±0.625V, and ±0.3125V
• One 12-bit monolithic multiplying analog output channel
• 16 digital output channels
• 16 digital input channels
• Three A/D trigger modes: Software trigger, Programmable pacer and
external trigger
• Programmable IRQ level for A/D data transfer
• Rugged 37-pin D-sub connector
• Compact size PCB
2 • Introduction
Page 9

1.2 Applications
• Industrial and laboratory ON/OFF control
• Energy management
• Annunciation
• 16 TTL/DTL compatible digital input channels
• Security controller
• Product test
• Period and pulse width measurement
• Event and frequency counting
• Waveform and pulse generation
Introduction • 3
Page 10

1.3 Specifications
Analog Input (A/D)
♦
Converter:
•
type
Resolution:
•
Number of channels:
•
Programmable Gain:
•
ADS-774 or equivalent one, successive approximation
12-bit
8 single-ended
1, 2, 4, 8, 16 (programmable)
Input Range:
•
Bipolar: ±5V, ± 2.5V, ±1.25V, ±0.625V, and ±0.3125V
Conversion Time:
•
Maximum Sampling Rate: ≤ 50
•
Over-voltage protection:
•
Accuracy:
•
Input Impedance:
•
AD Clock Sources (trigger modes):
•
pacer, and external pulse trigger
Data Transfer Modes:
•
Analog Output (D/A)
♦
Converter:
•
Number of channel:
•
Resolution:
•
Output Range:
•
Internal reference: (unipolar) 0~5V or 0~10V
External reference: (unipolar) max. +10V or -10V
Settling Time:
•
(programmable)
8 µ sec
0.015% of reading ± 1 Bit LSB
10 MΩ
DAC7548 or equivalent, monolithic multiplying
1 double-buffered analog outputs
12-bit
30 µ sec
KHz
Continuous ± 35V maximum
Software trigger, internal timer
Polling and Interrupt
Linearity:
•
Output driving capability:
•
4 • Introduction
±1/2 bit LSB
5mA max.
±
Page 11

Digital I/O (DIO)
♦
Number of channel:
•
Input Voltage:
•
• Low: Min. 0V; Max. 0.8V
• High: Min. +2.0V
Input Load:
•
• Low: +0.5V @ -0.2mA max.
• High: +2.7V @+20 uA max.
Output Voltage:
•
• Low: Min. 0V; Max. 0.4V
• High: Min. +2.4V
Output Driving Capacity:
•
• Low: Max. +0.5V at 8.0mA (Sink)
• High: Min. 2.7V at 0.4mA(Source)
Programmable Counter
♦
Device:
•
A/D pacer Source:
•
together) with a 2MHz time base
82C54
16 DI & 16 DO (TTL compatible)
32-bit timer (two 16-bit counter cascaded
Pacer Output:
•
General Specifications
♦
I/O Base Address
•
Interrupt IRQ
•
Connector
•
Operating Temperature
•
Storage Temperature
•
Humidity
•
Power Consumption
•
: 37-pin D-type connector
: 5 ~ 95%, non-condensing
0.00046 Hz ~ 100K Hz
: 16 consecutive address location
: IRQ 2,3,4,5,6,7 (programmable)
: 0°C ~ 55°C
: -20°C ~ 80°C
:
Introduction • 5
Page 12

• +5 V @ 440 mA typical
• +12V @ 60 mA typical
Dimension:
•
158mm X 108mm
6 • Introduction
Page 13

1.4 Software Supporting
The ACL-8111 is programmed using simple 8-bit I/O port commands. Users
can use high level language, such as BASIC, C, or PASCAL, or low- level
language, such as assembly to program the board. For the programming
under Windows or LabView, please contact your dealer to purchase ACLSDLL2 or ACLD-LVIEW.
1.4.1 ACLS-DLL2
For easily program the board under Windows environment, we also provide
ACLS-DLL2
DLL2, you can use compilers such as VB, VC/C++, or Delphi. ACLS-DLL2 is
included in ADLINK CD. It need license.
1.4.2 ACLS-LVIEW
For easily link the ACL-8111 with LabView of National Instrument, the ACLSLVIEW includes the Vis of the ACL-8111 under for Windows 3.1/95/98 and
NT. ACLS-LVIEW is included in ADLINK CD. It need license.
, which include the DLL for Windows 95/98/NT. With ACLS-
Introduction • 7
Page 14
2
Installation
This chapter describes how to install the ACL-8111. The following list shows
the installation procedures:
1. Unpacking and check what you have.
2. Check the PCB and the location of jumper and switch.
3. Setup the jumpers according to the system and applications setting.
4. Installation the external termination boards.
5. Wiring with signals according to the connector pin assignments.
8 • Installation
Page 15
2.1 Unpacking
The ACL-8111 card contains sensitive electronic components that can be
easily damaged by static electricity.
The card should be done on a grounded anti-static mat. The operator should
be wearing an anti-static wristband, grounded at the same point as the antistatic mat.
Inspect the card module carton for obvious damage. Shipping and handling
may cause damage to your module. Be sure there are no shipping and
handing damages on the module before processing.
After opening the card module carton, extract the system module and place it
only on a grounded anti-static surface component side up.
Again inspect the module for damage. Press down on all the socketed IC's to
make sure that they are properly seated. Do this only with the module place
on a firm flat surface.
Note:
DO NOT APPLY POWER TO THE CARD IF IT HAS BEEN
DAMAGED.
You are now ready to install your ACL-8111.
2.2 What You Have
In addition to this User's Manual, the package includes the following items:
• ACL-8111 multi-function data acquisition card
• ADLINK Software CD
If any of these items is missing or damaged, contact the dealer from whom
you purchased the product. Save the shipping materials and carton in case
you want to ship or store the product in the future.
Installation • 9
Page 16
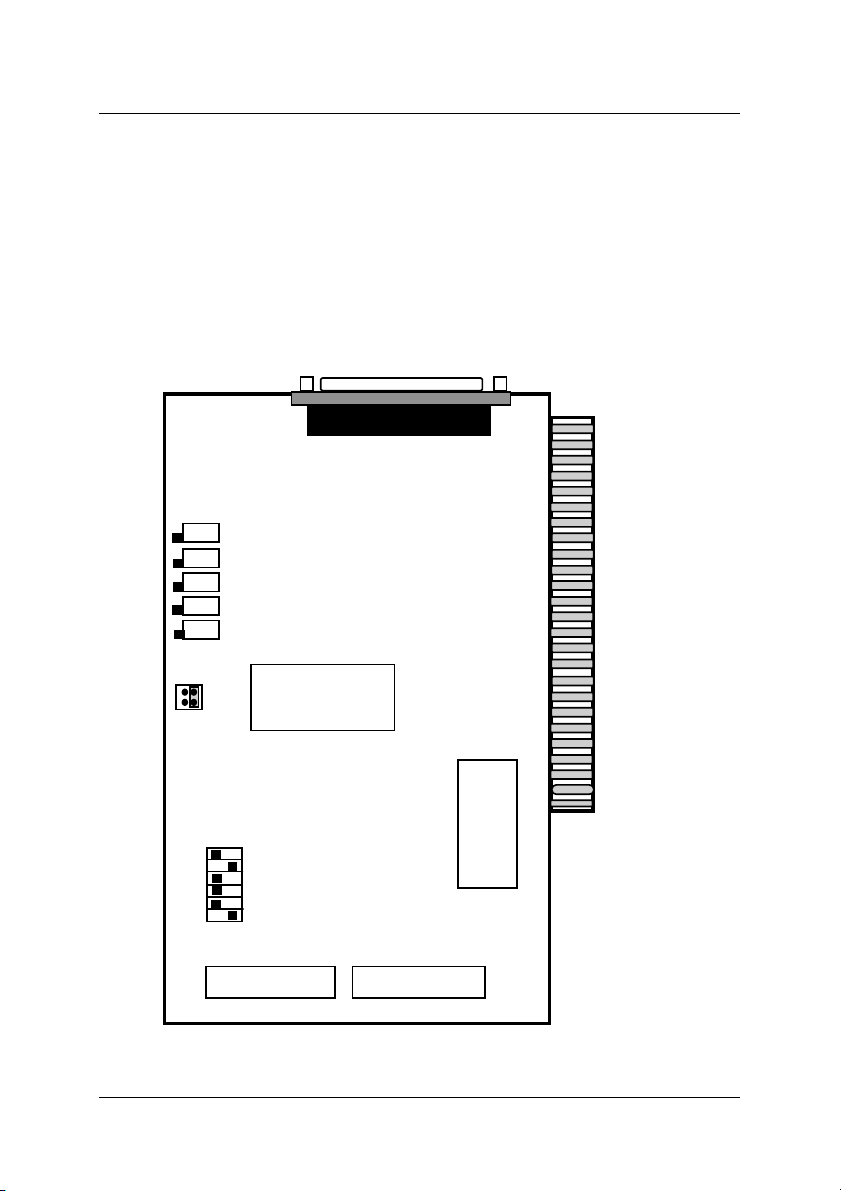
2.3 PCB Layout
In ACL-8111, there are three connectors (CN1~CN3), one switch (SW1), one
jumper (JP1) and 5 variable resistors (VR1~VR5). Please refer Figure 2.3 to
identify the location these components.
The card's jumpers and switches are preset at the factory. Please setup the
switch and jumper according to the system setting and the application
requirements.
A jumper is closed (sometimes referred to as "shorted") with the plastic cap
inserted over two pins of the jumper. A jumper is open with the plastic cap
inserted over one or no pin(s) of the jumper.
CN1
VR5
VR3 VR4
VR1 VR2
JP2
JP1
-5V
-10V
SW1
. .
8111
10 • Installation
ADS574
CN3
. .
. .
. .
. .
. .
. .
. .
. .
CN2
. .
. .
. .
. .
. .
. .
Figure 2.3 ACL-8111‘s PCB layout
8253
. .
Page 17
2.4 Base Address Setting
A
The ACL-8111 requires 16 consecutive address locations in I/O address
space. The base address of the ACL-8111 is restricted by the following
conditions.
1.
The base address must be within the range Hex 200 to Hex 3FF.
2.
The base address should not conflict with any PC reserved I/O address.
See Appendix A.
3.
The base address must not conflict with any add-on card on your own
PC. Please check your PC before installing the ACL-8111.
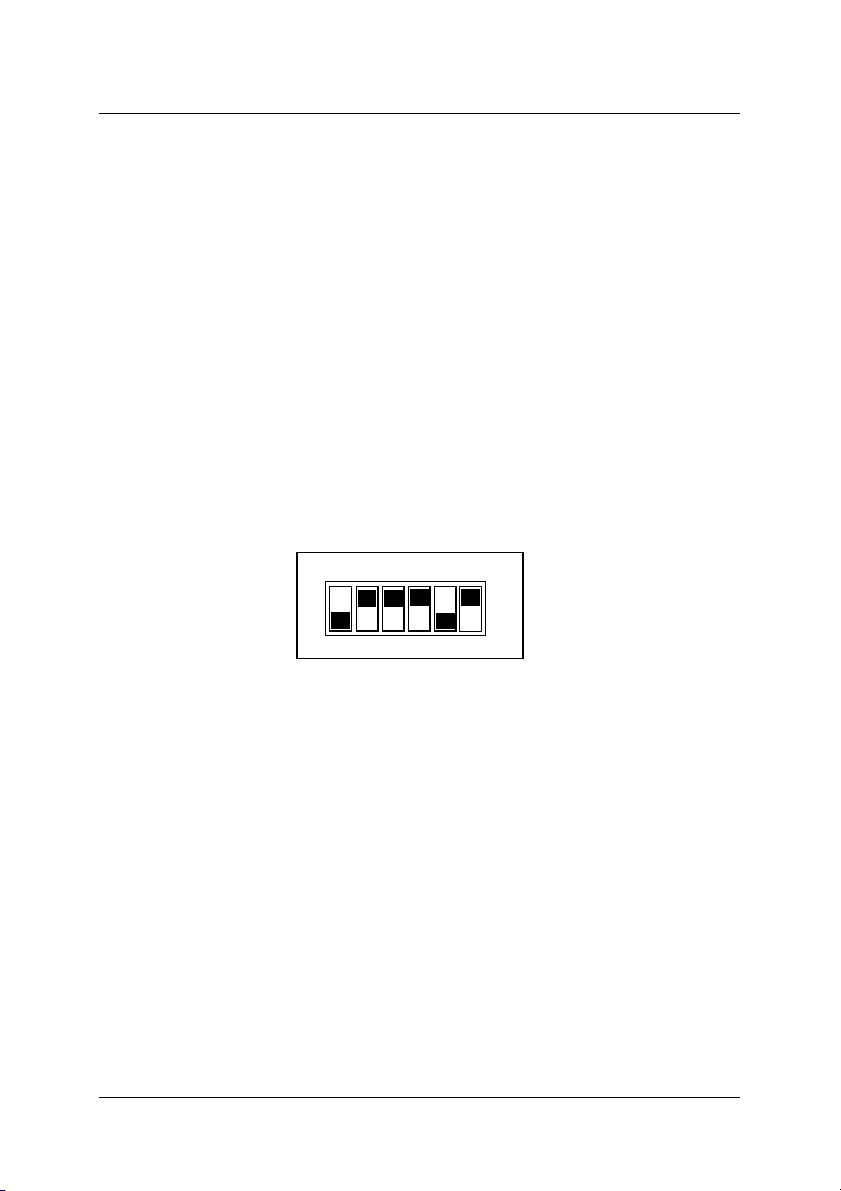
The ACL-8111's base address is selected by a 6 position DIP switch
SW1.The default setting of base address is set to be HEX 220. All possible
base address combinations are listed as Table 2.2. You may modify the
base address if the address HEX 220 has been occupied by another add-on
card.
SW1 : Base Address = Hex 220
ON
23456
1
( 9 8 7 6 5 4 )
DIP
Figure 2.4 Default Base Address Setting
Installation • 11
Page 18
I/O port
address(Hex)
000-00F
100-10F
:
200-20F
210-21F
220-22F
(default)
:
300-30F
3F0-3FF
1
A9
ON
(0)
ON
(0)
OFF
(1)
OFF
(1)
OFF
(1)
OFF
(1)
OFF
(1)
2
A8 3 A7
ON
(0)
OFF
(1)
ON
(0)
ON
(0)
ON
(0)
OFF
(1)
OFF
(1)
ON
(0)
ON
(0)
ON
(0)
ON
(0)
ON
(0)
ON
(0)
OFF
(1)
4
A6
ON
(0)
ON
(0)
ON
(0)
ON
(0)
ON
(0)
ON
(0)
OFF
(1)
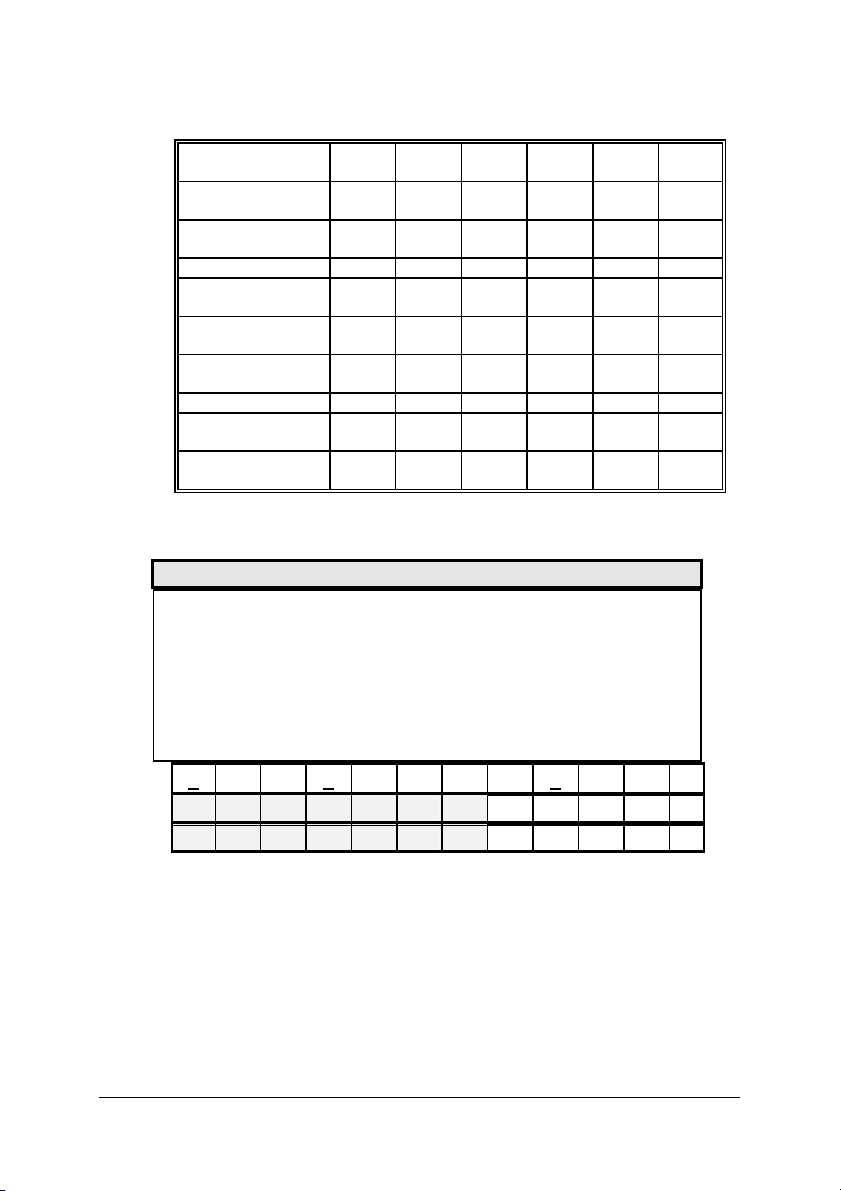
ON: 0 OFF: 1.
A4 ... A9 are correspond to PC address lines.
How to Define a Base Address for the ACL-8111?
The DIP1 to DIP6 in the switch SW1are one to one corresponding
to the PC bus address line A9 to A4. A0, A1, A2, and A3 are
always 0. If you want to change the base address, you can only
change the values of A9 to A4 (shadow area of below table). The
following table is an example, which shows you how to define the
base address as
Hex 220
.
Base Address:
Hex 220
2 2 0
1 0 0 0 1 0 0 0 0 0
A9 A8 A7 A6 A5 A4 A3 A2 A1 A0
5
A5
ON
(0)
ON
(0)
ON
(0)
ON
(0)
OFF
(1)
ON
(0)
OFF
(01
6
A4
ON
(0)
ON
(0)
ON
(0)
OFF
(0)
ON
(0)
ON
(0)
OFF
(1)
12 • Installation
Page 19
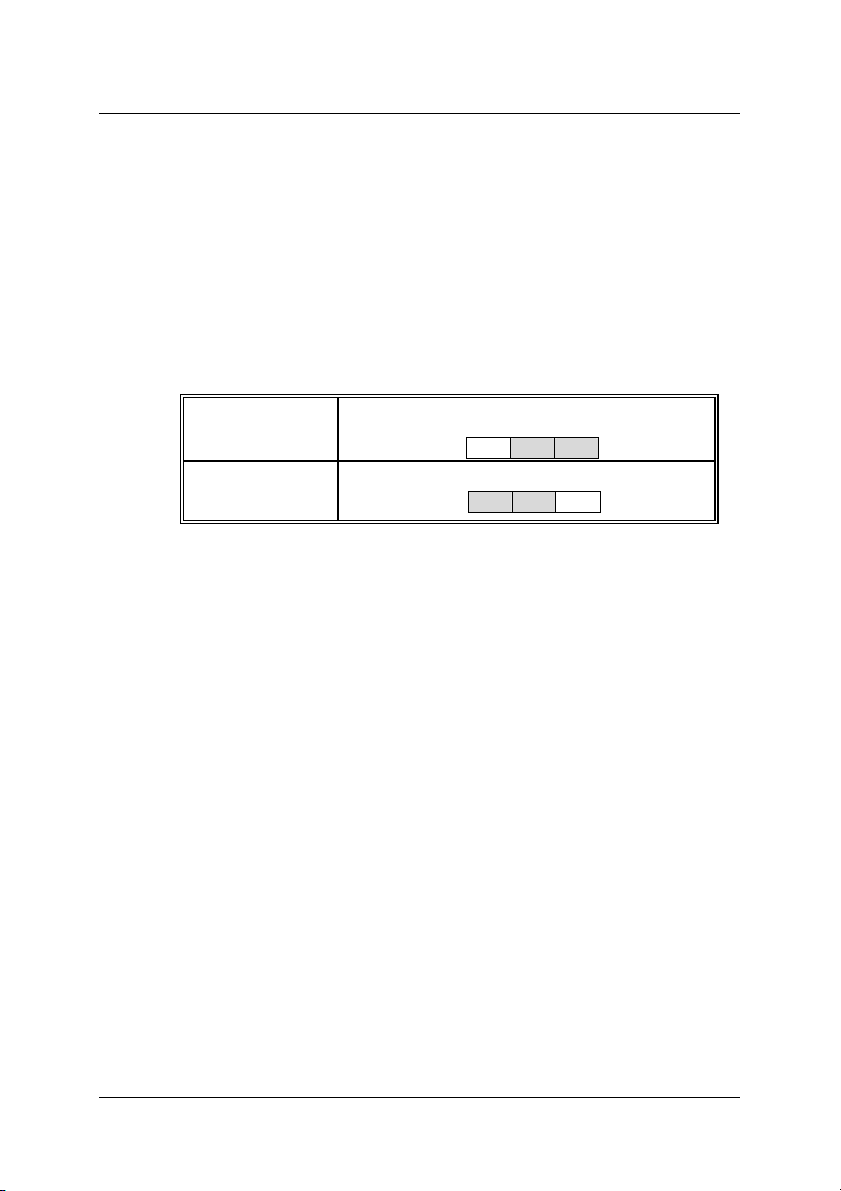
2.5 D/A Reference Voltage Setting
The analog output range of ACL-8111 depends on the reference voltage,
which is selected by JP1. There are two range of reference voltages can be
assigned as either -5V or -10V, that will generate output range 0V ~ +5V or
0V ~ +10V, respectively.
The setting of D/A reference voltage is specified as following:
When you select -10V for the D/A reference voltage, you should be very
careful the analog output. Because the -10 V voltage source is supplied from
your PC system, and it may be up to 11.5V only. Therefore, it will cause you
analog output is less than +10V.
Reference Voltage
is -5V
(default)
Reference Voltage
is -10V
-10V -5V
-10V -5V
JP1
h h h
JP1
h h h
Installation • 13
Page 20

2.6 Connectors Pin Assignments
The ACL-8111 has three connectors: one 37-pin D-type connector (CN1) and
two 20-pin insulation displacement connectors (CN2 and CN3).
CN1 is for analog input and analog output signals. CN2 is for digital input
signal. CN3 is for digital output signal. The pin assignments for each
connector are illustrated in the Figure 3.1 ~ Figure 3.3.
CN1: Analog input/output
(1)
AI0
(2)
AI1
(3)
AI2
(4)
AI3
(5)
AI4
(6)
AI5
(7)
AI6
(8)
AI7
(9)
-(10)
-(11)
-(12)
-(13)
-(14)
-(15)
DGND
(16)
-(17)
-(18)
-(19)
+5V
Figure 3.1. Pin Assignment of CN1
(20)
(21)
(22)
(23)
(24)
(25)
(26)
(27)
(28)
(29)
(30)
(31)
(32)
(33)
(34)
(35)
(36)
(37)
AGND
AGND
AGND
AGND
AGND
AGND
AGND
AGND
--
-AO1
--
--
--
--
--
--
--
Legend:
AIn : Analog Input Channel n (single-ended)
AO : Analog Output Channel
A.GND : Analog Ground
D.GND : Ground
+5V : +5V from system power supply
14 • Installation
Page 21

CN 2: Digital Input Signals (DI 0 - 15)
2
2
DI 0
DI 2
DI 4
DI 6
DI 8
DI 10
DI 12
DI 14
GND
+5V
CN 3: Digital Output Signals (
DO 0 - 15)
DO 0
DO 2
DO 4
DO 6
DO 8
DO 10
DO 12
DO 14
GND
+5V
CN2
1
3 4
5 6
7 8
9 10
11 1 2
13 14
15 16
17 18
19 20
CN3
1
3 4
5 6
7 8
9 10
11 1 2
13 14
15 16
17 18
19 20
DI 1
DI 3
DI 5
DI 7
DI 9
DI 11
DI 13
DI 15
GND
Strobe
DO 1
DO 3
DO 5
DO 7
DO 9
DO 11
DO 13
DO 15
GND
+12V
Legend:
DO n : Digital output signal channel n
DI n : Digital input signal channel n
GND : Digital ground
+12V : +12V power from system
Strobe : Digital input strobe signal
Installation • 15
Page 22

2.7 Daughter Board Connection
The ACL-8111 can be connected with five different daughter boards ACLD9137, 9182, 9185, and 9188. The functionality and connections are specified
as following:
2.7.1 Connect with ACLD-9137
The ACLD-9137 is a direct connector for the card, which is equipped with 37pin D-sub connector. This board provides a simple way for connection. It is
very suitable for the simple applications that do not need complex signal
condition before the A/D conversion is performed.
2.7.2 Connect with ACLD-9182
The ACLD-9182 is a 16 channel isolated digital input board. This board is
connected with CN2 of ACL-8111 via 20-pin flat cable. The advantage of this
board is a 500Vdc isolation voltage is provided, and it can protect your PC
system from damage when an abnormal input signal is occurred.
2.7.3 Connect with ACLD-9185
The ACLD-9185 is a 16 channel SPDT relay output board. This board is
connected with CN3 of ACL-8111 via 20-pin flat cable. By using this board,
you can control outside device through the digital output signals.
ACLD-9185
ACLD-9182
16 • Installation
CN3
CN2
ACL-8111
Page 23

2.7.4 Connect with ACLD-9188
ACLD-9188 is a general-purpose terminal board for the entire card, which
comes equipped with 37-pin D-sub connector.
CN3
CN1
CN2
ACLD-9188
ACL- 8111
Installation • 17
Page 24

3
Registers Format
The chapter specifies the detailed descriptions of the register format. This
information is useful for the programmers who wish to handle the card by
low-level program.
3.1 Registers Address Map
The ACL-8111 requires 16 consecutive addresses in the I/O address space.
The following table (Table 3.1) shows the location of each register relative to
the base address and register descriptions.
Address Read Write
Base + 0 Counter 0 Counter 0
Base + 1 Counter 1 Counter 1
Base + 2 Counter 2 Counter 2
Base + 3 Not Used Counter Control
Base + 4 A/D low byte D/A low byte
Base + 5 A/D high byte D/A high byte
Base + 6 DI low byte Not Used
Base + 7 DI high byte Not Used
Base + 8 Not Used Clear Interrupt Request
Base + 9 Not Used Gain Control
Base + 10 Not Used Multiplexer Scan Control
Base + 11 Not Used Mode Control
Base + 12 Not Used Software A/D trigger
Base + 13 Not Used DO low byte
Base + 14 Not Used DO high byte
Base + 15 Not Used Not Used
18 • Registers Format
Table 3.1 I/O Port Address Map
Page 25

3.2 A/D Data Registers
ACL-8111 provides 8 single-end A/D input channels. The 12 bit A/D data is
put in two 8-bit registers. The low byte date (8 LSBs) is at address BASE+4
and the high byte data (4 MSBs) is at address BASE+5. The DRDY bit is
used to indicate the status of A/D conversion. DRDY goes to low-level
means A/D conversion is completed.
Address : BASE + 4 and BASE + 5
Attribute: read only
Data Format:
Bit 7 6 5 4 3 2 1 0
BASE+4 AD7 AD6 AD5 AD4 AD3 AD2 AD1 AD0
BASE+5 0 0 0
AD11. AD0: Analog to digital data. AD11 is the Most Significant Bit (MSB).
AD0 is the Least Significant Bit (LSB).
DRDY: Data Ready Signal.
1: A/D data is not ready
0: A/D conversion is completed.
It will be set to 1 after reading out the low byte data
DRDY
AD11 AD10 AD9 AD8
Registers Format • 19
Page 26

3.3 A/D Channel Multiplexer Register
This register is used to control the A/D channels number to convert. It's a
write only register. When the channel number is written to the register, the
multiplexer switches to the new channel and waits for conversion.
Address: BASE + 10
Attribute:
Data Format:
BASE+10 X X X X X CL2 CL1 CL0
CLn: multiplexer channel number.
CL2 is MSB, and CL0 is LSB.
Where CL2, CL1, and CL0 are multiplexer channel selection:
write only
Bit 7 6 5 4 3 2 1 0
Channel NO. CL2 CL1 CL0
0 0 0 0 Power Up Setting
1 0 0 1
2 0 1 0
3 0 1 1
4 1 0 0
5 1 0 1
6 1 1 0
7 1 1 1
20 • Registers Format
Page 27

3.4 A/D Input Range Control Register
The gain control register is a write-only register using address Base + 9. It is
used to adjust the gain of the analog input programmable amplifier. The data
format is specified as follows:
Address: BASE + 9
Attribute:
Data Format:
BASE+9 X X X X X G2 G1 G0
Where G2, G1, and G0 are Gain selection:
G2 G1 G0 GAIN Input Range (V)
The relationship between input voltage range, maximum input voltage and
gain is specified as the equation:
write only
Bit 7 6 5 4 3 2 1 0
0 0 0 x1
0 0 1 x2
0 1 0 x4
0 1 1 x8
1 0 0 x16
1 0 1 Invalid X
1 1 0 Invalid X
1 1 1 Invalid X
± 5V
± 2.5V
± 1.25V
± 0.625V
± 0.3125V
Power Up Setting
Analog Input Range = Maximum Input Voltage / Gain
Registers Format • 21
Page 28

3.5 Mode and Interrupt Control Register
The Mode and Interrupt control register is a write-only register. This register
control the AD operating modes and the IRQ level of the ACL-8111. The AD
operation modes include the AD clock source and the AD data transfer
method.
Address: BASE + 11
Attribute:
Data Format:
BASE+11 X IR2 IR1 IR0 X M2 M1 M0
Where M0, M1, and M2 are mode selection:
M2 M1 M0 Description
write only
Bit 7 6 5 4 3 2 1 0
0 0 0 Software trigger with program polling
0 0 1 (No interrupt generated)
0 1 0 External trigger with program polling
0 1 1
1 0 0
1 0 1 Not Used
1 1 0
1 1 1 Not Used
External trigger with interrupt polling
(With End-of-conversion “EOC” interrupt)
Internal time pacer trigger and polling
(No interrupt generating)
Internal timer pacer trigger with interrupt data
transfer(With End-of-conversion “EOC” interrupt)
Note
: The external trigger signal comes from the DI 0 (pin-1 of CN2).
Where IR0, IR1, and IR2 are interrupt IRQ level settings:
IR2 IR1 IR0 IRQ Level
0 0 0 IRQ2
0 0 1 Not Used
0 1 0 IRQ2
0 1 1 IRQ3
1 0 0 IRQ4
1 0 1 IRQ5
1 1 0 IRQ6
1 1 1 IRQ7
22 • Registers Format
Page 29

3.6 Interrupt Status Register
The Interrupt Status Register is used to clear the interrupt status for next new
interrupt can be generated. If the ACL-8111 is in interrupt data transfer mode,
a hardware status flag will be set after each A/D conversion. You have to
clear the status flag by just writing any data to this register, let the ACL-8111
can generate next interrupt if a new A/D conversion is happen.
Address : BASE + 8
Attribute:
Data Format:
BASE+8 X X X X X X X X
write only
Bit 7 6 5 4 3 2 1 0
3.7 Software Trigger Register
If you want to generate a trigger pulse to the ACL-8111 for A/D conversion,
you just write any data to this register, and then the A/D converter will be
triggered.
Address: BASE + 12
Attribute:
Data Format:
BASE+12 X X X X X X X X
write only
Bit 7 6 5 4 3 2 1 0
Registers Format • 23
Page 30

3.8 Digital I/O register
There are 16 digital input channels and 16 digital output channels are
provided by the ACL-8111. The address Base + 6 and Base + 7 are used for
digital input channels, and the address Base + 13 and Base + 14 are used for
digital output channels.
Address : BASE + 6 & BASE + 7
Attribute:
Data Format:
Base + 6 DI7 DI6 DI5 DI4 DI3 DI2 DI1 DI0
Base + 7 DI15 DI14 DI13 DI12 DI11 DI10 DI9 DI8
Address: BASE + 13 & BASE + 14
Attribute: write only
Data Format:
Base + 13
Base + 14
read only
Bit 7 6 5 4 3 2 1 0
Bit 7 6 5 4 3 2 1 0
DO7 DO6 DO5 DO4 DO3 DO2 DO1 DO0
DO15 DO14 DO13 DO12 DO11 DO10 DO9 DO8
3.9 D/A Output Register
The D/A converter will convert the D/A output register data to the analog
signal. The register data of the address Base + 4 and Base + 5 are used for
D/A conversion.
Address: BASE + 4 & BASE + 5
Attribute:
Data Format:
Base + 4 DA7 DA6 DA5 DA4 DA3 DA2 DA1 DA0
Base + 5 X X X X DA11 DA10 DA9 DA8
DA0 is the LSB and DA11 is the MSB of the 12 bit data.
X: don't care
24 • Registers Format
write only
Bit 7 6 5 4 3 2 1 0
Page 31

Note: The D/A registers are "double buffered" so that the D/A analog
output signals will not updated until the second (high) byte is written.
This can insure a single step transition when the D/A conversion.
Registers Format • 25
Page 32

4
Operation Theorem
The chapter describe the operation theorem of ACL-8111. The functions
include the A/D conversion, D/A conversion, and digital I/O. The operation
theorem can help you to understand how to manipulate and to program the
ACL-8111.
4.1 A/D Conversion
Before programming the ACL-8111 to perform the A/D conversion, you
should understand the following issues:
• A/D conversion procedure
• A/D trigger mode
• A/D data transfer mode
• Signal Connection
26 • Operation Theorem
Page 33

4.1.1 A/D Conversion Procedure
The A/D conversion is starting by a trigger source, then the A/D converter will
start to convert the signal to a digital value. The ACL-8111 provides three
trigger modes, see section 4.1.2.
The DRDY bit in the A/D data register (Base+5) will become to 0 once the
A/D conversion is completed and data on the Base+4 and Base+5 are ready.
A read data command on BASE+4 will automatically reset the DRDY bit to be
1 which means data is not ready on the Base+4 and Base+5. The A/D data
should be transferred into PC's memory for further using. The ACL-8111
provides three data transfer modes that allow users to optimize the DAS
system. Refer to section 4.1.3 for data transfer modes.
4.1.2 A/D Clock Sources (Trigger Modes)
In the ACL-8111, two Internal or one external clock sources can trigger A/D
conversion. The two internal sources are the software trigger and the timer
pacer trigger, which is controlled by the A/D operation mode control register
(BASE+11). The A/D operation modes combine the AD clock sources and
the data transfer mode together. Please also refer to the next section for
detail data transfer modes. The available operation modes include:
• Software trigger and software polling transfer
• Internal timer pacer and interrupt transfer
• Internal timer pacer and software polling transfer
• External trigger and interrupt transfer
• External trigger and software polling transfer
Three AD clock sources (or trigger sources) are available in the ACL-8111.
Software trigger
The trigger source is software controllable in this mode. That is, the A/D
conversion is starting when any value is written into the software trigger
register (BASE+12). Under this mode, the timing of the A/D conversion is
fully controlled by software, it is suitable for low speed A/D conversion.
However, it is difficult to control the fixed A/D conversion rate except a timer
interrupt service routine is used and the software trigger is programmed
inside the interrupt service routines.
Operation Theorem • 27
Page 34

Timer Pacer Trigger
d
An on-board timer / counter chip 8253 provide a pacer trigger source at a
fixed rate. Two counters of the 8253 chip are cascaded together to generate
trigger pulse with precise frequency. It's recommend to use this mode if your
applications need a fixed and precise A/D sampling rate. It can be combined
with the EOC (end-of-conversion) interrupt data transfer.
On the ACL-8111, the 8253 chip for timer pacer trigger source is configured
as below:
The pacer rate of above configuration is determined by the formula:
Pacer rate = 2 MHz / (C1 * C2)
8253 Timer/Counter
Not Use
Counter 0
CLK0
2MHz
Oscillator
Vcc
GATE0
Counter 1
CLK1
GATE1
Counter 2
CLK2
GATE2
OUT0
OUT1
OUT2
Timer Pacer
The maximum pacer signal rate is 2MHz/4=500K, which excess the
maximum A/D conversion rate of the ACL-8111. The minimum signal rate is
2MHz/65535/65535, which is a very slow frequency that user may never use
it.
For example, if you wish to get a pacer rate 2.5 kHz, you can set C1 = 40 and
C2 = 10. That is
2.5KHz = 2Mhz / (40 x 20)
External Trigger
Through the pin-1 of CN2 (DI0), the A/D conversion also can be performed
when a rising edge of external signal is occurred. The conversion rate of this
mode is more flexible than the previous two modes, because the users can
handle the external signal by outside device. The external trigger can
combine with the interrupt data transfer, or even program polling data
transfer. Generally, the interrupt data transfer is often used when external
trigger mode is used.
28 • Operation Theorem
Page 35

4.1.3 A/D Data Transfer Modes
On the ACL-8111, three A/D data transfer modes can be used when the
conversion is completed. The data transfer mode is controlled by the mode
control register (BASE+11). The different transfer modes are specified as
follows:
Software Data Transfer
Usually, this mode is used with software A/D trigger mode. After the A/D
conversion is triggered by software, the software should poll the DRDY bit
until it becomes to high level. Whenever the low byte of A/D data is read, the
DRDY bit will be cleared to indicate the data is read out.
It is possible to read A/D converted data without polling. The A/D conversion
time will not excess 8µs on ACL-8111 card. Hence, after software trigger, the
software can wait for at least 25µs then read the A/D register without polling.
EOC Interrupt Transfer
The ACL-8111 provides hardware interrupt capability. Under this mode, an
interrupt signal is generated at end of A/D conversion (EOC) then the data is
ready to be read. It is useful to combine the interrupt transfer with the timer
pacer trigger mode. Under this mode, the data transfer is essentially
asynchronous with the control software.
When the interrupt transfer is used, you have to set the interrupt IRQ level by
hardware jumper. Please refer section 2.10 for IRQ jumper setting. After the
A/D conversion is completed, a hardware interrupt will be inserted and its
corresponding ISR (Interrupt Service Routine) will be invoked and executed.
The converted data is transferred by the ISR program.
Operation Theorem • 29
Page 36

4.2 D/A Conversion
A
The operation of D/A conversion is simpler than A/D operation. You only
need to write digital values into the D/A data registers and the corresponding
voltage will be output from the AO. The ACL-8111 has one uni-polar analog
output channels. To make the D/A output connections from the appropriate
D/A output, please refer Figure 4.2.
-5 or -10
Ref In
INT or Ext
D/A Converter
-
+
Pin-30 ( AO)
To D/A Output
Pin-20 ( A.GND)
nalog GND
Figure 4.2 Connection of Analog Output Connection
The mathematical relationship between the digital number DAn and the
output voltage is formulated as following:
Vout Vref
=− ×
DAn
4096
Where the Vref is the reference voltage, the Vout is the output voltage, and
the DAn is the digital value in D/A data registers.
Before performing the D/A conversion, users should care about the D/A
reference voltage, which set by the JP1. Please refer section 2.6 for jumper
setting. The reference voltage will effect the output voltage. If the reference
voltage is -5V, the D/A output scaling will be 0~5V. If the reference voltage is
-10V, the D/A output scaling will be 0~10V. The relationship of reference
voltage and output range is summary in the following table.
Reference Voltage DA Output Voltage Range
-5 V 0V ~ +5V
-10 V 0V ~ +10V
30 • Operation Theorem
Page 37

Note that the D/A registers are "double buffered", so that the D/A analog
output signals will not be updated until the high byte is written. When write 12
bits data to D/A registers of the ACL-8111, the low byte must be written
before the high byte. This procedure can insure a single step transition when
the D/A conversion.
Note:
when writing digital data to D/A register,
be written first
released to output. After the high byte is written, both high and low
will add and passed to A/D converter.
, because the register will temporarily hold and not
the low byte data should
Operation Theorem • 31
Page 38

4.3 Digital Input and Output
The ACL-8111 provides 16 digital input and 16 digital output channels
through the connector CN2 and CN3 on board. The digital I/O signal are fully
TTL/DTL compatible. The detailed digital I/O signal specification can be
referred in section 1.3.
74LS244
Digital Input(DI)
From TTL Signal
Digital Output (DO)
74LS373
ACL-8111
Figure 4.3 Digital I/O Connection
To program digital I/O operation is fairly straightforward. The digital input
operation is just to read data from the corresponding registers, and the digital
output operation is to write data to the corresponding registers. Note that the
DIO data channel can only be read or written in form of 8 bits together. It is
impossible to access individual bit channel.
Digital GND (DGND)
Outside Device
To TTL Devices
32 • Operation Theorem
Page 39

5
C/C++ Library for DOS
This chapter describes the DOS software library, which is free supplied. The
DOS library software includes a utility program, C language library, and some
demonstration programs, which can help you reduce the programming work.
To program in Windows environment, please use ACLS-DLL2. The function
reference manual of ACLS-DLL2 is included in the ADLINK CD. It needs
license.
C/C++ Library for DOS • 33
Page 40

5.1 DOS Software Library Installation
5.1.1 Installation
To install the DOS library software and utilities, please follow the following
installation procedures:
1. Put ADLINK CD into the appropriate CD-ROM drive.
2. Type the following commands to change to the card’s directory (X
indicates the CD-ROM drive):
CD \NuDAQISA\8111
X:\>
3. Execute the setup batch program to install the software:
X:\NuDAQISA\8111>
SETUP
5.1.2 Running Utility
After finishing the installation, you can execute the utility by typing as follows:
C>cd ADLINK\8111\DOS\UTIL
C>8111UTIL
5.1.3 Example Programs
Six example programs in C language are supported in the directory
<SAMPLES>, you can refer these samples and modify them for your own
application. They can help you understand the library more quickly.
34 • C/C++ Library for DOS
Page 41

5.2 _8111_Initial
@ Description
An ACL-8111 card is initialized according to the card number and the
corresponding base address. Every ACL-8111 Multi-Function Data
Acquisition Card have to be initialized by this function before calling other
functions.
@ Syntax
int _8111_Initial(int card_number, int base_addresss )
@ Argument:
card_number: the card number to be initialized, only
two cards can be initialized, the card
number must be CARD_1 or CARD_2.
base_address:the I/O port base address of the card,
the default address on the hardware
setting is Hex 220.
@ Return Code:
ERR_NoError
ERR_InvalidBoardNumber
ERR_BaseAddressError
@ Example:
#include "8111.h"
main()
{
int ErrCode;
Errcode = _8111_Initial( CARD_1, 0x210 );
if ( ErrCode != ERR_NoError )
exit(0);
ErrCode = _8111_Initial( CARD_2, 0x220 );
if ( ErrCode != ERR_NoError )
exit(0);
...
}
C/C++ Library for DOS • 35
Page 42

5.3 _8111_Switch_Card_No
@ Description
This function is used on dual-cards system. After two ACL-8111 cards are
initialized by the initial function, you can select one card which you want to
operate.
@ Syntax
int _8111_Switch_Card_No(int card_number)
@ Argument:
card_number: The card number to be initialized, only
two cards can be initialized, the card
number must be CARD_1 or CARD_2.
@ Return Code:
ERR_NoError
ERR_InvalidBoardNumber
@ Example:
#include “aclerr.h”
#include “8111.h”
main()
{
_8111_Initial( CARD_1, 0x210 );
_8111_Initial( CARD_2, 0x220 );
/* Assume NoError when Initialize ACL-8111*/
_8111_Switch_Card_No( CARD_1 );
/*..... You can perform certain functions
to Card_1 here*/
_8111_Switch_Card_No( CARD_2 );
/*..... You can perform certain functions
to Card_2 here*/
}
36 • C/C++ Library for DOS
Page 43

5.4 _8111_DI
@ Description
This function is used to read data from digital input port. There are 16-bit
digital inputs on the ACL-8111. The bit 0 to bit 7 are defined as low byte
and the bit 8 to bit 15 are defined as the high byte.
@ Syntax
int _8111_DI( int port_number, unsigned char *data )
@ Argument:
port_number: To indicate which port is read,
DI_LO_BYTE
or DI_HI_BYTE.
DI_LO_BYTE: bit 0 ~ bit 7,
DI_HI_BYTE: bit8 ~ bit15
data: return value from digital port.
@ Return Code:
ERR_NoError
ERR_BoardNoInit
ERR_PortError
@ Example:
See Demo program . Demo Program 'DI_DEMO.C'
C/C++ Library for DOS • 37
Page 44

5.5 _8111_DI _Channel
@ Description
This function is used to read data from digital input channels (bit). There
are 16 digital input channels on the ACL-8111. When performs this
function, the digital input port is read and the value of the corresponding
channel is returned.
Note: channel means each bit of digital input ports.
@ Syntax
int _8111_DI_Channel(int di_ch_no, unsigned int
*data )
@ Argument:
di_ch_no: the DI channel number, the value has to be
set from 0 to 15.
data: return value, either 0 or 1.
@ Return Code:
ERR_NoError
ERR_BoardNoInit
ERR_InvalidDIChannel
@ Example:
#include “8111.h”
main()
{
unsigned int data;
int ch;
_8111_Initial( CARD_1, 0x220 );
/* Assume NoError when Initialize ACL-8111
*/
.
.
.
for( ch=0; ch<16; ch++ )
{
_8111_DI_Channel( ch , &data );
printf( "The value of DI channel %d
is %d.\n" , ch , data );
}
}
38 • C/C++ Library for DOS
Page 45

5.6 _8111_DO
@ Description
This function is used to write data to digital output ports. There are 16
digital outputs on the ACL-8111, they are divided by two ports,
DO_LO_BYTE and DO_HI_BYTE. The channel 0 to channel 7 are defined
in DO_LO_BYTE port and the channel 8 to channel 15 are defined as the
DO_HI_BYTE port.
@ Syntax
int _8111_DO(int port_number, unsigned char data )
@ Argument:
port_number: DO_LO_BYTE or DO_HI_BYTE
data: value will be written to digital output port
@ Return Code:
ERR_NoError
ERR_BoardNoInit
ERR_PortError
@ Example:
#include “aclerr.h”
#include “8111.h”
main()
{
_8111_Initial( CARD_1, 0x220 );
/* Assume NoError when Initialize ACL-8111
card */
.
.
_8111_DO( DO_LO_BYTE , 0x55 );
printf( "The low byte is now 0x55.\n" );
_8111_DO( DO_HI_BYTE , 0xAA );
printf( "The high byte is now 0xAA.\n" );
}
A more detailed program is Provided in this software 'DO_DEMO.C'
C/C++ Library for DOS • 39
Page 46

5.7 _8111_DA
@ Description
This function is used to write data to D/A converters. There is a Digital-toAnalog conversion channel on the ACL-8111. The resolution is 12-bit, i.e.
the range is from 0 to 4095.
@ Syntax
int _8111_DA(unsigned int data )
@ Argument:
data: D/A converted value, if the value is greater
than 4095, the higher 4-bits are negligent.
@ Return Code:
ERR_NoError
ERR_BoardNoInit
ERR_InvalidDAChannel
@ Example:
#include “aclerr.h”
#include “8111.h”
main()
{
_8111_Initial( CARD_1, 0x220 );
/* Assume NoError when Initialize ACL-
8111 */
/* if the hardware setting for DA output range
is 0~5V */
_8111_DA( 0x800 );
printf( "The output voltage is 2.5V
\n" );
}
A more complete program is provided in this software. 'DA_DEMO.C'
40 • C/C++ Library for DOS
Page 47

5.8 _8111_AD_Set_Channel
@ Description
This function is used to set AD channel by means of writing data to the
multiplexer scan channel register. There are 8 single-ended A/D channels
in ACL-8111, so the channel number should be set between 0 to 7 only.
The initial state is channel 0 which is a default setting by the ACL-8111
hardware configuration.
@ Syntax
int _8111_AD_Set_Channel( int ad_ch_no )
@ Argument:
ad_ch_no: channel number to perform AD conversion
@ Return Code:
ERR_NoError
ERR_BoardNoInit
ERR_InvalidADChannel
@ Example:
#include “aclerr.h”
#include “8111.h”
main()
{
_8111_Initial( CARD_1, 0x220 );
/* Assume NoError when Initialize ACL-8111
*/
_8111_AD_Set_Channel( 3 );
printf( "AD channel 3 is now selected.\n" );
...
/* the following A/D's operation is based on channel
3 */
}
C/C++ Library for DOS • 41
Page 48

5.9 _8111_AD_Set_Gain
@ Description
This function is used to set the A/D analog input range by means of writing
data to the A/D range control register. The initial value of gain is “1’ which
is set by the ACL-8111 harware. The relationship between gain and input
voltage ranges is specified by following tables:
The initial value of gain is '1‘ and input type is bipolar, which are pre-set by
the ACL-8111 hardware. The relationship between analog input voltage
range, gain and input mode are specified by following tables:
Input Range (V) Gain Gain Code
±5 V
±2.5 V
±1.25 V
±0.625 V
±0.3125V
@ Syntax
int _8111_AD_Set_Gain( int ad_range )
@ Argument:
ad_range: the programmable range of A/D conversion,
please refer to above tabbs for the
possible values .
@ Return Code:
ERR_NoError
ERR_BoardNoInit
ERR_AD_InvalidRange
@ Example:
#include “aclerr.h”
#include “8111.h”
main()
{
_8111_Initial( CARD_1, 0x220 );
/* Assume NoError when Initialize ACL-8111
*/
_8111_AD_Set_Gain( AD_GAIN_8 );
printf( "The A/D analog input range is +/-
0.625V now.\n" );
}
X 1 AD_GAIN_1
X 2 AD_GAIN_2
X 4 AD_GAIN_4
X 8 AD_GAIN_8
X 16 AD_GAIN_16
42 • C/C++ Library for DOS
Page 49

5.10 _8111_AD_Set_Mode
@ Description
This function is used to set the A/D trigger and data transfer mode by
means of writing data to the mode control register. The hardware initial
state of the ACL-8111 is set as AD_MODE_1 software( internal) trigger
with program polling data.
A/D Mode Description
AD_MODE_0 Software Trigger, Software Polling Transfer
AD_MODE_1 Software Trigger, Interrupt Transfer
AD_MODE_2 External Trigger, Software Polling Transfer
AD_MODE_3 External Trigger, Interrupt Transfer
AD_MODE_4 Timer Trigger, Software Polling Transfer
AD_MODE_5 Timer Trigger, Interrupt Transfer
@ Syntax
int _8111_AD_Set_Mode(int irq_no, int ad_mode )
@ Argument:
irq_no: interrupt IRQ level
ad_mode: AD trigger and data transfer mode
( please to refer above table.)
@ Return Code:
ERR_NoError
ERR_BoardNoInit
ERR_InvalidMode
@ Example:
#include “aclerr.h”
#include “8111.h”
main()
{
_8111_Initial( CARD_1 , 0x220 );
/* Assume NoError when Initialize ACL-8111
*/
_8111_AD_Set_Mode( IRQ5, AD_MODE_0 );
printf( "Now, disable internal trigger.\n" );
}
C/C++ Library for DOS • 43
Page 50

5.11 _8111_AD_Soft_Trig
@ Description
This function is used to trigger the A/D conversion by software. When the
function is called, a trigger pulse will be generated and the converted data
will be stored in the base address Base +4 and Base +5, and can be
retrieved by function _8111_AD_Aquire(). Please refer to section 6.11.
@ Syntax
int _8111_AD_Soft_Trig( void )
@ Argument:
None
@ Return Code:
ERR_NoError
ERR_BoardNoInit
@ Example:
Please refer the example in next section.
44 • C/C++ Library for DOS
Page 51

5.12 _8111_AD_Aquire
@ Description
This function is used to poll the AD conversion data. It will trigger the AD
conversion, and read the 12-bit A/D data until the data is ready ('data
ready' bit becomes low).
@ Syntax
int _8111_AD_Aquire( int *ad_data )
@ Argument:
ad_data: 12-bit A/D converted value, the value should
within 0 to 4095.
@ Return Code:
ERR_NoError
ERR_BoardNoInit
ERR_AD_AquireTimeOut
@ Example:
#include “aclerr.h”
#include “8111.h”
main()
{
int ad_data;
int ErrCode;
_8111_Initial( CARD_1, 0x220 );
/* Assume NoError when Initialize ACL-8111
*/
/* Set to software trigger at first*/
_8111_AD_Set_Mode( IRQ5, AD_MODE_1 );
/* then trigger the AD */
_8111_AD_Soft_Trig();
/* wait for AD data ready then read it */
ErrCode = _8111_AD_Aquire( &ad_data );
if( ErrCode == ERR_NoError )
printf( "The AD value is %d.\n", ad_data );
else
printf( "AD conversion error happen\n" );
}
Also see deme program 'AD_DEMO1.C'
C/C++ Library for DOS • 45
Page 52

5.13 _8111_CLR_IRQ
@ Description
This function is used to clear interrupt request which requested by the
ACL-8111. If you use interrupt to transfer A/D converted data, you should
use this function to clear interrupt request status, otherwise no new coming
interrupt will be generated.
@ Syntax
int _8111_CLR_IRQ( void )
@ Argument
None
@ Return Code:
ERR_NoError
ERR_BoardNoInit
46 • C/C++ Library for DOS
Page 53

5.14 _8111_AD_INT_Start
@ Description
The function will perform A/D conversion N times with interrupt data
transfer by using pacer trigger. It takes place in the background which will
not be stopped until the Nth conversion has been completed or your
program execute _8111_AD_INT_Stop() function to stop the process.
After executing this function, it is necessary to check the status of the
operation by using the function 8111_AD_INT_Status(). The function is
perform on single A/D channel with fixed analog input range.
@ Syntax
int _8111_INT_Start( int ad_ch_no, int ad_range,
int irq_ch_no, int count, int *ad_buffer,
unsigned int c1, unsigned int c2)
@ Argument:
ad_ch_no: A/D channel number
ad_range: A/D analog input range, please refer to
section 6.9 for the possible values.
irq_ch_no:IRQ channel number used to transfer AD data,
the possible value is defined in ' 8111.h '
count: the numbers of A/D conversion
ad_buffer:the start address of the memory buffer to
store the A/D data, the buffer size must be
large than the number of A/D conversion.
c1: the 16-bit timer frequency divider of timer
channel #1
c2: the 16-bit timer frequency divider of timer
channel #2
@ Return Code:
ERR_NoError
ERR_InvalidTimerValue
ERR_BoardNoInit
ERR_InvalidADChannel
ERR_AD_InvalidRange
ERR_InvalidIRQChannel
@ Example:
See demo Program 'AD_Demo2.C'
C/C++ Library for DOS • 47
Page 54

5.15 _8111_AD_INT_Status
@ Description
Since the _8111_AD_INT_Start() function executes in background, you
can issue the function _8111_AD_INT_Status to check the status of
interrupt operation.
@ Syntax
int _8111_AD_INT_Status( int *status , int *count )
@ Argument:
status: status of the INT data transfer
0: A/D INT is completed
1: A/D INT is not completed
count: current conversion count number.
@ Return Code:
ERR_NoError
ERR_BoardNoInit
ERR_AD_INTNotSet
@ Example:
See demo program 'AD_Demo2.C'
5.16 _8111_AD_INT_Stop
@ Description
This function is used to stop the interrupt data transfer function. After
executing this function, the internal AD trigger is disable and the AD timer is
stopped. The function returns the number of the data which has been
transferred, no matter whether the AD interrupt data transfer is stopped by
this function or by the _8111_AD_INT_Start() itself.
@ Syntax
int _8111_AD_INT_Stop( int *count )
@ Argument:
count: the number of A/D data which has been
transferred.
@ Return Code:
ERR_NoError
ERR_BoardNoInit
ERR_AD_INTNotSet
@ Example:
See Demo Program 'AD_Demo2.C'
48 • C/C++ Library for DOS
Page 55

5.17 _8111_AD_Timer
@ Description
This function is used to setup the Timer #1 and Timer #2. Timer #1 & #2
are used as frequency divider for generating constant A/D sampling rate
dedicatedly. It is possible to stop the pacer trigger by setting any one of the
dividers as 0. The AD conversion rate is limited due to the conversion time
of the AD converter, the highest sampling rate of the ACL-8111 can not be
exceeded 30 KHz,Thus the multiplication of the dividers must be larger
than 70.
@ Syntax
int _8111_AD_Timer( unsigned int c1 , unsigned int
c2 )
@ Argument:
c1: frequency divider of timer #1
c2: frequency divider of timer #2,
@ Return Code:
ERR_NoError
ERR_BoardNoInitERR_InvalidTimerValue
@ Example:
main()
{
int ErrCode;
_8111_Initial( CARD_1, 0x220 );
/* Assume ERR_NoError when Initialize ACL-
8111 */
_8111_AD_Timer( 100 , 100 );
/* set AD sampling rate to 2MHz/(10*10) */
..
_8111_AD_Timer( 0 , 0 );
/* stop the pacer trigger */
}
C/C++ Library for DOS • 49
Page 56

6
Calibration
In data acquisition process, how to calibrate your measurement devices to
maintain its accuracy is very important. Users can calibrate the analog input
and analog output channels under the users' operating environment for
optimizing the accuracy. This chapter will guide you to calibrate your ACL8111 to an accuracy condition.
Note: Your ACL-8111 board has been carefully calibrated in the factory
before it is shipped to you.
6.1 What do you need
Before calibrating your ACL-8111 card, you should prepare some equipment
for the calibration:
1.
Calibration program: once the program is executed, it will guide you to
do the calibration. This program is included in the delivered package.
2.
One 5 1/2 digit multi-meter (6 1/2 digital multi-meter is recommended).
3.
A voltage calibrator or very stable and noise free DC voltage generator.
50 • Calibration
Page 57

6.2 VR Assignments
There are five variable resistors (VR) on the ACL-8111 board to allow
you making accurate adjustment on A/D and D/A channels. The function
of each VR is specified below:
VR No. Function
VR1 D/A full scale adjustment
VR2 D/A zero offset adjustment
VR3 A/D offset adjustment
VR4 A/D full scale adjustment
VR5 A/D programmable amplifier offset adjustment
6.3 D/A Calibration
The D/A input reference voltage should be connected to for calibration. You
may use the JP1 to select the -5V or -10V reference. The zero offset and full
scale of D/A channel can be turned through VR1 and VR2. The full-scale
gain of D/A is adjusted by VR1, and zero offsets are adjusted by VR2.
Note
: A precision voltmeter to measure the D/A output is very important.
The procedures of calibration are as follows:
Full scale adjustment :
1. Set JP1 to select -5V as reference voltage.
2. Connect VDM (+) to CN1 pin 30 and VDM (-) to A.GND.
3. Write digital data '4095' (0x0FFF) into D/A's digital data Register
(BASE+4 and BASE+ 5).
4. Adjust
(reference voltage with opposite sign).
Offset zero adjustment:
1. Write digital data ' 0' (0x0000) to D/A's digital data register (BASE+4 and
BASE+ 5).
2. Adjust
VR1
until your voltmeter's voltage reading is equal to +5V
VR2
until the your voltmeter's voltage reading is 0V.
Calibration • 51
Page 58

6.4 A/D Calibration
Since the ACL-8111 provides versatile A/D input ranges, the calibration on
one A/D range may cause a small offset on other ranges. It is suggested that
you calibrate the A/D range which you need best accuracy.
The procedures of calibration are as follows:
1. Set the analog input range as: +/- 5V, i.e. the gain = 1.
2. Short the A/D channel 0 (pin 1 of CN1) to ground (GND), and connect
the TP1 (+) and TP2 (-) with your DVM. Trim the variable resister VR5 to
obtain 0 reading in the DVM.
3. Applied a +5V input signal to A/D channel 0, and trim the VR4 to obtain
reading between 4094~4095.
4. Applied a +0V input signal to A/D channel 0, and trim the VR3 to obtain
reading flickers between 2048~2049.
5. Repeat step 2 and step 3, adjust VR3 and VR4.
52 • Calibration
Page 59

Appendix A. Demo. Programs
In this software diskette, there are 6 demonstration programs are provided.
They could help you to program your application by using C Language
Library easily. The description of these programs are specified as follows:
AD_DEMO1.C:
AD_DEMO2.C
AD_DEMO3.C: A/D conversion uses DMA data transfer.
DA_DEMO.C: D/A conversion
DI_DEMO.C: Read data from digital input channels
DO_DEMO.C: Write data to digital output channels
A/D conversion uses software trigger and
program data transfer.
A/D conversion uses interrupt and program
data transfer.
Appendix A. Demo. Programs • 53
Page 60

Warranty Policy
Thank you for choosing ADLINK. To understand your rights and enjoy all the
after-sales services we offer, please read the following carefully.
1. Before using ADLINK’s products please read the user manual and
follow the instructions exactly. When sending in damaged products for
repair, please attach an RMA application form which can be
downloaded from: http://rma.adlinktech.com/policy/.
2. All ADLINK products come with a limited two-year warranty, one year for
products bought in China.
• The warranty period starts on the day the product is shipped from
ADLINK’s factory.
• Peripherals and third-party products not manufactured by ADLINK
will be covered by the original manufacturers' warranty.
• For products containing storage devices (hard drives, flash cards,
etc.), please back up your data before sending them for repair.
ADLINK is not responsible for any loss of data.
• Please ensure the use of properly licensed software with our
systems. ADLINK does not condone the use of pirated software
and will not service systems using such software. ADLINK will not
be held legally responsible for products shipped with unlicensed
software installed by the user.
• For general repairs, please do not include peripheral accessories. If
peripherals need to be included, be certain to specify which items
you sent on the RMA Request & Confirmation Form. ADLINK is not
responsible for items not listed on the RMA Request & Confirmation
Form.
3. Our repair service is not covered by ADLINK's guarantee in the
following situations:
• Damage caused by not following instructions in the User's Manual.
• Damage caused by carelessness on the user's part during product
transportation.
• Damage caused by fire, earthquakes, floods, lightening, pollution,
other acts of God, and/or incorrect usage of voltage transformers.
• Damage caused by inappropriate storage environments such as
with high temperatures, high humidity, or volatile chemicals.
54 • Warranty Policy
Page 61

• Damage caused by leakage of battery fluid during or after change
of batteries by customer/user.
• Damage from improper repair by unauthorized ADLINK technicians.
• Products with altered and/or damaged serial numbers are not
entitled to our service.
• This warranty is not transferable or extendible.
• Other categories not protected under our warranty.
4. Customers are responsible for all fees necessary to transport damaged
products to ADLINK.
For further questions, please e-mail our FAE staff: service@adlinktech.com
Warranty Policy • 55
 Loading...
Loading...