

Preliminary
ADCP-75-179
Preliminary Issue A
September 2004
(Digivance
®
LRCS 800/900 MHz SMR System
with Version 3.01 EMS Software
(Operation and Maintenance Manual
20025-A
1304947 Rev 1

ADCP-75-179
Preliminary Issue A
September 2004
Digivance® LRCS 800/900 MHz SMR System
with Version 3.01 EMS Software
Operation and Maintenance Manual
1304947 Rev 1
ADCP-75-179 • Preliminary Issue A • September 2004 • Preface
COPYRIGHT
© 2004, ADC Telecommunications, Inc.
All Rights Reserved
Printed in the U.S.A.
REVISION HISTORY
ISSUE DATE REASON FOR CHANGE
A 09/2004 Original issue.
LIST OF CHANGES
The technical changes incorporat ed into this issue are lis ted below.
PAGE IDENTIFIER DESCRIPTION OF CHANGE
All Original issu e.
TRADEMARK INFORMATION
ADC and Digivance are regi s tered trademarks of A D C Telecommunications, Inc.
Stargazer is a registered t rademark of ADC DSL Systems, Inc.
Procomm Plus is a r egistered trademar k of Quarterdeck Corporation.
Acrobat and Adobe are register ed trademarks of Adobe Systems, Inc.
DISCLAIMER OF LIABILITY
Contents herein are current as of the date of publication. ADC reserves the right to change the contents without prior notice. In no
event shall ADC be liable for any damages resulting from loss of data, loss of use, or loss of profits and ADC further
disclaims an y and all liability for indirec t, incidental, special, consequen tial or other similar dam ages. This discl aimer of
liability applies to all products, publications and services during and after the warranty period.
This publ ication may be verified at any time by contacting ADC’s Technical Assistance Cent er at 1-800-366-3891, ex tension 73476
(in U.S. A . or Canada) or 952-9 17-3476 (outside U.S.A. and Canada), or by e-mai l t o w ire less.tac@adc.com
Page ii
ADC Telecommunications, Inc.
P.O. Box 1101, Minneapolis, Minnesota 55440-1101
In U.S.A. and Canada: 1-800-366-3891
Outside U.S.A. and Canada: (952) 938-8080
Fax: (952) 917-1717
TABLE OF CONTENTS
Content Page
ABOUT THIS MANUAL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii
RELATED PUBLICATIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii
ADMONISHMENTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . viii
GENERAL SAFETY PRECAUTIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .viii
STANDARDS CERTIFICATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ix
LIST OF ACRONYMS AND ABBREVIATIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ix
1 INTRODUCTION. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-1
2 LRCS SYSTEM OVERVIEW . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-1
2.1 Basic System Components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-1
2.2 Enhanced Base Transceiver Station Interface. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-3
2.3 Handset Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-3
2.4 Local Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-3
2.5 Network Operations Center Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-5
2.6 SNMP Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-6
3 SYSTEM FUNCTIONS AND FEATURES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-7
3.1 Fiber Optic Transport . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-7
3.2 Control and Monitoring Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-9
3.3 Fault Detection and Alarm Reporting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-9
3.4 Powering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-9
3.5 Equipment Mounting and Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-9
ADCP-75-179 • Preliminary Issue A • September 2004 • Preface
SECTION 1:
OVERVIEW
SECTION 2:
DESCRIPTION
1 INTRODUCTION. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-3
2 HOST UNIT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-3
2.1 Primary Components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-3
2.2 Mounting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-3
2.3 Fault Detection and Alarm Reporting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-4
2.4 RF Signal Connections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-4
2.5 RF Signal Level Adjustments. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
2.6 Propagation Delay . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-5
2.7 Optical Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-5
2.8 Controller Area Network Interface Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-5
2.9 Service Interface Connection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
2.10 Auxiliary Interface Connector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
2.11 Powering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-6
2.12 Cooling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-6
© 2004, ADC Telecommunications , Inc.
Page iii
ADCP-75-179 • Preliminary Issue A • September 2004 • Preface
TABLE OF CONTENTS
Content Page
2.13 User Interface. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-6
3 SPECTRUM TRANSPORT MODULE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-8
3.1 Primary Components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-8
3.2 Mounting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-9
3.3 Fault Detection and Alarm Reporting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-9
3.4 Antenna Cable Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-10
3.5 RF Signal Level Adjustment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-10
3.6 Optical Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-10
3.7 Service Interface Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-10
3.8 Auxiliary Interface Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-10
3.9 Powering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-10
3.10 Cooling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-11
3.11 User Interface. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-11
4 35 WATT LINEAR POWER AMPLIFIER . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-13
4.1 Primary Components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-13
4.2 Mounting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-14
4.3 Fault Detection and Alarm Reporting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-14
4.4 Powering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-14
4.5 Cooling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-14
4.6 User Interface. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-14
5 REMOTE UNIT MOUNTING SHELF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-16
5.1 Indoor Mounting Shelf . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-16
6 SLIM-STYLE REMOTE UNIT CABINETS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-17
6.1 Slim-Style Single-STM Cabinet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-18
6.2 Slim-Style Dual-STM Cabinet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-20
7 ACCESSORY ITEMS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-23
7.1 Remote Unit Back-up Battery Kit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-23
7.2 Wavelength Division Multiplexer System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-24
7.3 Coarse Wavelength Division Multiplexer System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2- 25
8 DIGIVANCE ELEMENT MANAGEMENT SYSTEM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-26
8.1 Digivance EMS Primary Components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-26
8.2 Software Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-28
8.3 Computer Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-28
8.4 Digivance EMS Computer Interface Connections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-28
8.5 Digivance EMS User Interfaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-29
9 SPECIFICATIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-31
1 BEFORE STARTING OPERATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-1
1.1 Tools and Materials. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-1
Page iv
© 2004, ADC Telecommunications , Inc.
SECTION 3:
OPERATION
TABLE OF CONTENTS
Content Page
1.2 Readiness Check . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-2
2 TURN-UP SYSTEM AND VERIFY OPERATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-2
2.1 Turn-Up Procedure. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-3
2.2 Check/Download HU and RU Control Program and FPGA Program Software . . . . . . . . . . . . . . . . . . . . . . . . . 3-6
2.3 Determine Forward Path Input Signal Level . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-8
2.4 Enter Site Name and Site Number . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-10
2.5 Enter Host Forward Attenuation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-11
2.6 Determine Output Signal Level at STM Antenna Port . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-13
2.7 Enter Remote Forward Attenuation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-13
2.8 Enter Host Reverse Attenuation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-15
2.9 Enter Host Forward and Reverse Delay . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-17
1 SYSTEM MAINTENANCE OVERVIEW . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1
1.1 Tools and Materials . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-1
2 FAULT DETECTION AND ALARM REPORTING . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-2
3 FAULT ISOLATION AND TROUBLESHOOTING . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-6
3.1 Host Unit Troubleshooting. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-7
3.2 STM Troubleshooting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-9
3.3 LPA Troubleshooting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-13
4 TEST PROCEDURES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-15
4.1 Optical Power Test. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-15
4.2 Optical Loopback Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-17
5 SCHEDULED MAINTENANCE REQUIREMENTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-19
ADCP-75-179 • Preliminary Issue A • September 2004 • Preface
SECTION 4:
MAINTENANCE
SECTION 5:
GENERAL INFORMATION
1 WARRANTY/SOFTWARE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-1
2 SOFTWARE SERVICE AGREEMENT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-1
3 REPAIR/EXCHANGE POLICY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-1
4 REPAIR CHARGES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-2
5 REPLACEMENT/SPARE PRODUCTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-2
6 RETURNED MATERIAL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-2
7 CUSTOMER INFORMATION AND ASSISTANCE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-3
© 2004, ADC Telecommunications , Inc.
Page v
ADCP-75-179 • Preliminary Issue A • September 2004 • Preface
TABLE OF CONTENTS
Content Page
Blank
Page vi
© 2004, ADC Telecommunications , Inc.
ABOUT THIS MANUAL
This installati on and operation manual provides the following information:
• An overview of the Digivance 800/900 MHz SMR Long-Range Coverage Solution
(LRCS) system.
• A complete description of the basic system components including the Host Unit (HU),
Spectrum Transport Module (STM), Linear Power Amplifier (LPA), and Digivance
Element Management System (EMS).
• A basic description of the slim-style Remote Unit (RU) cabinets and indoor mounting
shelf.
• Procedures for tuning -up the system and verifying that the system is functioning properly.
• Procedures for maintaining the system including scheduled maintenance tasks and fault
isolation and trouble shooting procedures.
• Product warranty, repair, return, and replacement information.
The procedures for installing the remote unit modules and enclosures and for installing and
using the EMS software are provided in other publications which are referenced in the Related
Publications section and at appropriate points within this manual.
ADCP-75-179 • Preliminary Issue A • September 2004 • Preface
RELATED PUBLICATIONS
Listed below are related manuals, their content, and their publication numbers. Copies of these
publications can be ordered by contacting the Technical Assistance Center at 1-800-366-3891,
extension 73476 (in U.S.A. or Canada) or 952-917-3476 (outside U.S.A. and Canada).
Title/Description ADCP Number
Digivance LRCS System 800/900 MHz SMR Rear Access Host Unit
Installation and Maintenance Manual 75-180
Provides instructions for mounting the rear access host unit in an equipment
rack, installing and connecting the v arious cab les, and replacing t he cooling fans.
Digivance LRCS Dual-STM Systems Supplemental Manual 75-157
Provides supplemental information for LRCS systems that utilize one of the
dual-STM cabinets.
Digivance Element Management System V ersion 3.01 User Manual 75-151
Provides instr uctions for inst alling the Digiv a nce Element Management System
(EMS) software and for using both the Graphical User Interface (GUI) and the
Network Operations Center (NOC) versions of the software.
Digivance SNMP Agent Software User Manual 75-152
Describes how to install, configure, and use the LRCS SNMP Proxy Agent.
© 2004, ADC Telecommunications , Inc.
Page vii
ADCP-75-179 • Preliminary Issue A • September 2004 • Preface
ADMONISHMENTS
Important safety admonishments are used thr oughout this manual to warn of possible hazards to
persons or equipment. An admonishment identifies a possible hazard and then explains what
may happen if the hazard is not avoided. The admonishments — in the form of Dangers,
Warnings, and Cautions — must be followed at all times. These warnings are flagged by use of
the triangular alert icon (seen below), and are listed in descending order of severity of injury or
damage and likelihood of occurrence.
Danger: Danger is used to indicate the presence of a hazard that will cause severe personal
injury, death, or substantial property damage if the hazard is not avoided.
Warning: Warning is used to indicate the presence of a hazard that can cause s evere personal
injury, death, or substantial property damage if the hazard is not avoided.
Caution: Caution is used to indicate the presence of a hazard that will or can cause minor
personal injury or property damage if the hazard is not avoided.
GENERAL SAFETY PRECAUTIONS
Danger: This equipment uses a Class 1 Laser according to FDA/CDRH rules. Laser radiation
can seriously damage the retina of the eye. Do not look into the ends of any optical fiber. Do not
look directly into the optical transceiver of any digital unit or exposure to laser radiation may
result. An optical power meter should be used to verify active fibers. A protective cap or hood
MUST be immediately placed ov er any radiating trans ceiv er or optical fiber connec tor to avoid
the potential of dangerous amounts of radiation exposure. This practice also prevents dirt
particles from entering the adapter or connector.
Danger: Do not look into the ends of any optical fiber. Exposure to laser radiation may result.
Do not assume laser power is turned-off or the fiber is disconnected at the other end.
Danger: Wet conditions increase the potential for receiving an electrical shock when installing
or using electrically-powered equipment. To prevent electrical shock, never install or use
electrical equipment in a wet location or during a lightning storm.
Warning: The HU is powered by 48 VDC power which is supplied over customer-provided
wiring. To prevent electrical shock when installing or modifying the HU power wiring,
disconnect the wiring at the power source before working with uninsulated wires or terminals.
Caution: Always allow sufficient fiber length to permit routing of patch cords and pigtails
without severe bends. Fiber optic patch cords or pigtails ma y be permane ntly damaged if be nt
or curved to a radius of less than 2 inches (50 mm).
Page viii
© 2004, ADC Telecommunications , Inc.

STANDARDS CERTIFICATION
FCC: This equipment complies with the applicable sections of Title 47 CFR Part 90.
Installation requirements the licensee needs to follow are listed in Title 47 CFR 90.635. This
document may be found at the following website: http://www.access.gpo.gov/nara/cfr/
waisidx_03/47cfr90_03.html.
UL/CUL: This equipment complies with UL and CUL 50 Standard for Enclosures for
Electrical Equipment. This equipment provides the degree of protection specified by IP43 as
defined in IEC Publication 529.
FDA/CDRH: This equipment uses a Class 1 LASER according to FDA/CDRH Rules. This
product conforms to all appli cable standards of 21 CFR Part 1040.
IC: This equipment complies with the applic able secti ons of RSS-131. The term “IC:” be fore the
radio ce rtif i cat io n number onl y signi f ie s th at Indu str y Cana da Technical Spec if ica tion s we re met.
LIST OF ACRONYMS AND ABBREVIATIONS
ADCP-75-179 • Preliminary Issue A • September 2004 • Preface
The acronyms and abbreviations used in this manual are detailed in the following list:
AC Alte rnat i ng Current
ASCII A me ri can St an dard Code for Inform at io n Interc h ang e
Att Attenuation
AWG American Wire Gauge
BER Bit Error Rate
C Centigrade
CAN Controller Area Network
CDRH Center for Devic es and Radiological Health
CD-ROM Compact Disk Read Only Memory
COM Common
COMM Communication
Config Configuration
CWDM Coarse Wavelength Division Multiplexer
CUL Canadian Underwriters La boratories
DC Direct Curren t
DCE Data Communications Equipment
DTE Data Terminal Equipment
EBTS Enhanced Base Transceiver Station
EIA Electronic Industries Association
EMS Element Management System
ESD Electrostatic Dischar ge
F Fahrenheit
FCC Federal Communications Commission
FDA Food and Drug Administration
© 2004, ADC Telecommunications , Inc.
Page ix

ADCP-75-179 • Preliminary Issue A • September 2004 • Preface
FSO Free Space Opti cs
Fwd Forward
GFCI Ground Fault Circuit Int errupter
GUI Graphi ca l Us er Inte rface
HU Host Unit
IC Industry Canada
IP Internet Protocol
LED Light Emitting Diode
LPA Linear Power Amplifier
LRCS Long-Range Cov erage Solution
MHz Mega Hertz
MIB Management Information Base
MPE Maximum Permissible Exposure
MTBF Mean Time Between Failu re
NC Normally Clo sed
NEM Network Element Manager
NO Normally Open
NOC Network Operations Cente r
NPT National Pipe Tapered
OSP Outsid e Plan t
PA Power Amplifier
PC Personal Computer
PCS Personal Communications System
Prg Program
Pwr Power
Rev Reverse
RF Radio Frequency
RIM Radio Interface Module
RMA Return Material Authorization
RU Remote U n it
RX Receive or Receiver
SNMP Simple Network Management Protocol
SMR Specialized Mobile Radio
STM Spectrum Transport Module
TX Transmit or Transmitter
UL Underwriters Laboratories
VAC Volts Alternating Current
VDC Volts Direct Cu rre nt
VSWR Voltage Standing Wave Ratio
WECO Western Electric Company
WDM Wavelength Division Multiplexer
Page x
© 2004, ADC Telecommunications , Inc.

SECTION 1: OVERVIEW
1 INTRODUCTION. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-1
2 LRCS SYSTEM OVERVIEW . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-1
2.1 Basic System Components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-1
2.2 Enhanced Base Transceiver Station Interface. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-3
2.3 Handset Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-3
2.4 Local Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-3
2.5 Network Operations Center Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-5
2.6 SNMP Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-6
3 SYSTEM FUNCTIONS AND FEATURES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-7
3.1 Fiber Optic Transport . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-7
3.2 Control and Monitoring Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-9
3.3 Fault Detection and Alarm Reporting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-9
3.4 Powering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-9
3.5 Equipment Mounting and Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-9
_________________________________________________________________________________________________________
ADCP-75-179 • Preliminary Issue A • September 2004 • Section 1: Overview
1 INTRODUCTION
This section provides basic description, application, and configuration information about the
Digivance Long-Range Coverage Solution (LRCS) system. Throughout this publication, all
items referenced as “accessory items” are not furnished with the basic product and must be
purchased s eparately.
2 LRCS SYSTEM OVERVIEW
The Digivance LRCS system is an RF signal transport system that provides long-range RF
coverage in areas where it is impractical to place an Enhanced Base Transceiver Station (EBTS)
at the antenna site. High real estate costs and community restrictions on tower and equipment
locations often make it difficult to install the EBTS at the same location as the antenna. The
Digivance LRCS system is design ed to overcome equi pment p lacement problem s by allowing
base stations to be hubbed at a central location while placing antennas at remote locations with
minimal real estate requirements. With the Digivance LRCS system, RF signals can be
transported to remote locations to expand coverage into areas not receiving service or to extend
coverage into difficult to reach areas such as canyons, tunnels, or underground roadways.
2.1 Basic System Components
The basic components of a typical Digivance LRCS system and their function are shown in
Figure 1-1. A basic LRCS system consists of a Host Unit (HU) and a Remote Unit (RU). The
HU consists of a single-unit assembly that mounts in a standard equipment rack. The RU
consists of multiple electronic and o ptical modules that mount i n either an outdoor cabinet or an
indoor mounting shelf. Control and monitoring functions are provided by the Digivance
Element Management System (EMS). In addition, various accessory items including a back-up
battery for the RU, a passive Wavelength Division Multiplexer (WDM) system, and an active
Coarse Wavelength Division Multiplexer (CWDM) system are available as accessories.
© 2004, ADC Telecommunications , Inc.
Page 1-1

ADCP-75-179 • Preliminary Issue A • September 2004 • Section 1: Overview
BASE STATION
ANTENNA
HOST UNIT 1
ENHANSED
BASE
TRANSCEIVER
STATION 1
RF
WDM
WDM
REMOTE
UNIT 1
ENHANSED
BASE
TRANSCEIVER
STATION 2
ENHANSED
BASE
TRANSCEIVER
STATION 3
NETWORK
OPERATIONS
CENTER
(REMOTE
INTERFACE)
T1, DS0
WITH RS232
CONVERSION,
OR OTHER
MEDIUM
NETWORK SNMP
MANAGER
HOST UNIT 2
RF
RF
HOST UNIT 3
RS-232
ASCII
ETHERNET
LAN
PC COMPUTER WITH EMS
AND SNMP PROXY AGENT
(PERMANENT CONNECTION)
CONTROLLER
AREA
NETWORK
CONTROLLER
AREA
NETWORK
RS-232
CWDM
CWDM
RS-232
CWDM
CWDM
PC COMPUTER WITH EMS
(TEMPORARY CONNECTION)
CD-ROM WITH SNMP PROXY
AGENT SOFTWARE
CD-ROM WITH EMS
SOFTWARE
REMOTE
UNIT 2
REMOTE
UNIT 3
RS-232
20007-A
Page 1-2
© 2004, ADC Telecommunications , Inc.
Figure 1-1. System Overview Diagram

ADCP-75-179 • Preliminary Issue A • September 2004 • Section 1: Overview
2.2 Enhanced Base Transceiver Station Interface
The HU is interfaced with an EBTS over coaxial cables as shown in Figure 1-2. The EBTS
provides the RF channel inputs and outputs for a designated sector. In the forward path, the HU
receiv es two RF inputs from the EBTS. The HU digitizes the RF signals and then conve rts them
to digital optical signals for tr ansport to the RU. In the reverse path, the HU receives digital
optical signals from the RU. The HU converts the digital optical signals back to two RF outputs
which are supplied to the EBTS ov er the coaxial cable interface.
FORWARD
PATHS
ENHANCED
BASE
TRANSCEIVER
STATION
RF
REVERSE
PATHS
HOST UNIT
2.3 Handset Interface
The RU interfaces with the handsets (cell phones) through an antenna. In the reverse path, the
RU recei v es RF signals from each handse t (see Figure 1-1). The RU digitizes the RF signals and
then con verts them to digital optical signals for transport to the HU over the optical fiber link. In
the forward path, the RU receives digi tal optical signals from the HU. The RU converts the
optical signals to RF signals for transmission to the handsets. The RU is connected to an
antenna (not provided) which transmits and receives the handset RF signals.
2.4 Local Interface
Communications with an individual Digivance system is supported through a local interface
capability as shown in Figure 1-3. A loca l interface requ ires a PC-ty pe compute r loaded with
the Digivance Element Management System (EMS) softw are. EMS provides the various control
and monitoring functions required to locally manage a Digivance system. The EMS computer
can be directly connected to either the HU or RU through the computer’s RS-232 port.
Operation is implemented through the EMS Graphical User Interface (GUI). The GUI consists
of a series of screens from which the user selects the desired option or function. An RS-232
service port is provided on both the HU and the RU for connecting the EMS computer.
20008-A
Figure 1-2. EBTS/HU Interface
© 2004, ADC Telecommunications , Inc.
Page 1-3

ADCP-75-179 • Preliminary Issue A • September 2004 • Section 1: Overview
HOST UNIT
RS-232
REMOTE
UNIT
RS-232
CD-ROM WITH DIGIVANCE
ELEMENT MANAGEMENT
SYSTEM (EMS) SOFTWARE
LAPTOP WITH EMS
(LOCAL INTERFACE)
LAPTOP WITH EMS
(LOCAL INTERFACE)
18524-A
Figure 1-3. Local Management of a Single Digivance System
An EMS computer may be used to locally manage a networked group of multiple Digivance
systems as shown in Figure 1-4. A Controller Area Network (CAN) port is provided on each
HU. Up to twenty-four HU’s may be linked together through the CAN interface and controlled
by the same EMS computer. All the networked HU’s and the associated RU’s may be managed
by connecting the EMS computer to one HU. The EMS computer provides an RS-232 port (#1)
to support the interfa ce with the networked HU’s.
HOST UNIT
REMOTE
UNIT
CAN
HOST UNIT
REMOTE
UNIT
PC COMPUTER WITH EMS
(LOCAL INTERFACE WITH
MULTIPLE SYSTEMS)
Page 1-4
© 2004, ADC Telecommunications , Inc.
CAN
HOST UNIT
REMOTE
UNIT
RS-232
CD-ROM WITH DIGIVANCE
ELEMENT MANAGEMENT
SYSTEM (EMS) SOFTWARE
Figure 1-4. Local Management of Networked Digivance Systems
20009-A

2.5 Network Operations Center Interface
Communications between a Network Operations Center (NOC) and a networked group of
multiple Digivance systems is supported by a NOC interface capability as shown in Figure 1-5.
To support the NOC interface, a PC-type computer loaded with the Digivance Element
Management System (EMS) software is required. EMS provides the various control and
monitoring functions required to remotely manage multiple Digivance systems through the
NOC interface.
A Controller Area Network (CAN) port is provided on each HU. Up to twenty-four HU’s m ay
be linked together through the CAN interface and controlled by the same EMS computer. All
the networked HU’ s and the assoc iated RU’s may be managed by connecting the EMS computer
to one HU. The EMS computer provides an RS-232 port (#1) to support the interface with the
networked HU’s.
The NOC can be linked to the EMS computer through a T1 system, DS0 with RS232
conversion, or some other medium. The EMS computer provides an RS-232 ASCII interface
port (#2) to support the interface with the NOC.
At the NOC, control and monitoring of the networked Digivance systems is implemented
through a Network Element Manager (NEM) interface which requires only a VT100 terminal/
emulator for operation. The NEM interface language consists of simple ASCII text strings. All
communications are input as either SET or GET commands which result in ASCII text string
responses from the specified system or systems.
ADCP-75-179 • Preliminary Issue A • September 2004 • Section 1: Overview
NETWORK
OPERATIONS
CENTER
(REMOTE
INTERFACE)
T1, DS0
WITH RS232
CONVERSION,
OR OTHER
MEDIUM
RS-232
ASCII
HOST UNIT
HOST UNIT
HOST UNIT
CAN
CAN
RS-232
CD-ROM WITH EMS
SOFTWARE
PC COMPUTER WITH
EMS SOFTWARE
REMOTE
UNIT
REMOTE
UNIT
REMOTE
UNIT
20010-A
Figure 1-5. Remote Management of Networked Digivance Systems Through NOC Interface
© 2004, ADC Telecommunications , Inc.
Page 1-5

ADCP-75-179 • Preliminary Issue A • September 2004 • Section 1: Overview
2.6 SNMP Interface
Communications between an e xterna l Simple Netw ork Management Prot ocol (SNMP) Manager
and a networked group of multiple Digivance systems is supported by an SNMP interface
capability as shown in Figure 1-6. To support the SNMP interface, a PC-type computer loaded
with both the Digivance Element Management System (EMS) software and the SNMP Proxy
Agent software is required. The EMS and SNMP Proxy Agent software plus the associated
Management Information Base (MIB) provide the various control (Set) and monitoring (Get)
functions required to remotely manage multiple Digivance systems using an SNMP Manager.
A Controller Area Network (CAN) port is provided on each HU. Up to twenty-four HU’s m ay
be linked together through the CAN interface and controlled by the same EMS computer. All
the networked HU’ s and the assoc iated RU’s may be managed by connecting the EMS computer
to one HU. The EMS computer provides an RS-232 port (#1) to support the interface with the
networked HU’s.
The SNMP Manager may be linked with the EMS computer through a Local Area Network
(LAN). The EMS computer provides an Ethernet port to support the interface with the LAN.
The SNMP Proxy Agent supports two ver sions of the SNMP protocol : SNMPv1 and SNMPv2c.
A facility to Register/Unregister an SNMP Manager for receiving traps is also supported by the
SNMP Proxy Agent. The SNMP Manager is not included with the EMS software and must be
provided separa tely.
NETWORK
SNMP
MANAGER
ETHERNET
LOCAL
AREA
NETWORK
ETHERNET
HOST UNIT
HOST UNIT
HOST UNIT
CAN
CAN
RS-232
REMOTE
UNIT
REMOTE
UNIT
REMOTE
UNIT
CD-ROM WITH EMS
SOFTWARE
CD-ROM WITH SNMP
PROXY AGENT SOFTWARE
Figure 1-6. Remote Management of Networked Digivance Systems Through SNMP Manager
Page 1-6
© 2004, ADC Telecommunications , Inc.
PC COMPUTER WITH EMS
AND SNMP PROXY AGENT
20011-A

3 SYSTEM FUNCTIONS AND FEATURES
This section describes various system level functions and features of the Digiva nce system.
3.1 Fiber Optic Transport
In a typical Digivance system, the HU is connected to the RU over two single-mode o ptical
fibers. One fiber is used to transport the forward path optical signal. The other fiber is used to
tran sport the reve rse p ath optical signal. Because the optical signal is digital, the input and
output RF signal levels at the HU or the RU are not dependent on the level of the optical signal
or the length of the optical fiber. A diagram of the fiber optic transport system for a typical
Digivance sy s tem is sh own in Figure 1-7.
HOST UNIT
ADCP-75-179 • Preliminary Issue A • September 2004 • Section 1: Overview
FIBER OPTIC
LINK
FORWARD PATH
REVERSE PATH
REMOTE
UNIT
18526-A
Figure 1-7. Standard Fiber Optic Transport Application
The maximum length of the optical links is dependent on the loss specifications of the optical
fiber and the losses imposed by the various connectors and splices. The system provides an
optical budget of 25 dB (typical) when used with 9/125 single-mode fibe r.
In some applications, it may be desirable or necessary to combine the forward path and reverse
path optical signals from a single HU/RU pair onto a single optical fiber. This can be
accomplished by using a passive bi-directional Wavelength Division Multiplexer (WDM)
system. The optical wavelengths used in the Digivance syste m are 1550 nm for the forward path
and 1310 nm for the reverse path. Because different wavelengths are used for the forward and
reverse paths, both signals can be combined on a single optical fiber. One WDM module is
mounted with the HU and the other WDM module is mounted with the RU as shown in
Figure 1-8. The WDM system is available as an accesso ry item .
FIBER OPTIC
LINK
HOST UNIT
WDM
FORWARD AND
REVERSE PATH
WDM
REMOTE
UNIT
18527-A
Figure 1-8. Wavelength Division Multiplexer Application
© 2004, ADC Telecommunications , Inc.
Page 1-7

ADCP-75-179 • Preliminary Issue A • September 2004 • Section 1: Overview
In some applications, it may be desirable or necessary to combine the forward and reverse path
optical signals from multiple HU’s and RU’s onto a single optical fiber. This can be
accomplished by using an active Coarse Wavelength Division M ultiplexer (CWDM) system. Up
to four Digivance systems may be configured to operate over a single optical fiber. A CWDM
module is mounted with each HU and RU. An example of a typical CWDM application is
shown in Figure 1-9.
HOST UNIT 1
HOST UNIT 2
HOST UNIT 3
HOST UNIT 4
CWDM
A
CWDM
B
CWDM
C
CWDM
D
FIBER OPTIC
LINK
FORWARD AND
REVERSE PATH
CWDM
A
CWDM
B
CWDM
C
CWDM
D
REMOTE
UNIT 1
REMOTE
UNIT 2
REMOTE
UNIT 3
REMOTE
UNIT 4
18528-A
A Free S p ace O p ti cs ( FSO ) s ys t em (t hat m eets the Di g ivance L RC S d at a rat e p erf or ma n ce an d
BER requirements) may be used in applications where it is desirable or necessary to bridge an
open span and where it is impractical to lay a f iber optic cable. One FSO transceiver unit may be
mounted on the HU side of the open span and the other FSO transceiver unit may be mounted
on the RU side of the open span. A system diagram of an FSO application is shown in
Figure 1-10. FSO systems are available from various equipment manufacturers.
HOST UNIT
Page 1-8
© 2004, ADC Telecommunications , Inc.
Figure 1-9. Coarse Wavelength Division Multiplexer Application
FREE SPACE OPTICS LINK
FORWARD PATH
REVERSE PATH
FSO
TX/RX
FSO
TX/RX
FORWARD PATH
REVERSE PATH
Figure 1-10. Free Space Optics Application
REMOTE
UNIT
18530-A

3.2 Control and Monitoring Software
The EMS software and the SNMP Proxy Agent software provide control and monitoring
functions for the Digivance system through the local, NOC, and SNMP interfaces. The EMS
and SNMP Proxy Agent software are stored on CD-ROM’s which are shipped in a separate
package along with the software user manuals. The EMS software package is available without
the SNMP Proxy Agent if the SNMP interface capability not required for the application.
Software installation consists of copying the software files from the CD-ROM’s to a designated
directory on the hard-drive of the EMS computer.
The EMS software provides the capability to provision and configure the Digivance system for
operation. This includes selecting a site name, setting alarm thresholds, and setting forward and
reverse path RF gain adjustments. The EMS software also provides the capability to get alarm
messages (individual or summary), obtain data measurements, and to upgrade the HU/RU
system software. All control and monitor functions (except software upgrade which is not
supported by the NOC/NEM and SNMP interfaces and HU/RU pair site number assignment
which is not supported by the SNMP interface) may be implemented using the NOC/NEM
interface, the SNMP interface, or the EMS software GUI.
ADCP-75-179 • Preliminary Issue A • September 2004 • Section 1: Overview
3.3 Fault Detection and Alarm Reporting
LED indicators are provided on the front panel of the HU and on the front panels of the RU
modules to indicate if the system is normal or if a fault is detected. In addition, normally open
and normally closed alarm contacts (for both major and minor alarms) are provided at the HU
for connection to a customer-provided external alarm system. All alarms can also be accessed
through the NOC/NEM interface , SNMP manager, or the EMS software GUI.
3.4 Powering
The HU is powered by ±24 or ±48 VDC and must be hard-wired to a local office battery power
source through a fuse panel. A screw-down terminal strip is provided on the rear side of the HU
for the power connections.
The RU is po wered b y 120 or 240 VAC power (50 or 60 Hz) and must be connected to a 20 Amp
AC powe r source. I f the R U modules are insta lled in an outdoor cabinet, the A C wiring is placed
in conduit and permanently connected to the internal cabinet wiring. If the RU modules are
installed in an indoor mounting shelf, a sta ndard three-conductor AC power cord is provided for
connection to a standard AC power outlet. A back-up battery system is available for specified
outdoor cabinets as an accessory. The battery-backup system powers the RU if the AC power
source is disconnected or fails.
3.5 Equipment Mounting and Configuration
The HU is a single-unit assembly that is designed for mounting in a non-condensing indoor
envir onment such as inside a wiring closet or within an environmenta lly-controlled cabinet. The
HU is intended for rack-mount applications and may installed (usually within 20 feet of the
EBTS) in either a 19- or 23-inch, WECO or EIA, equipment rack.
© 2004, ADC Telecommunications , Inc.
Page 1-9

ADCP-75-179 • Preliminary Issue A • September 2004 • Section 1: Overview
The RU i s designed for mounting in ei ther an indoor or outdoor environment. The RU consists
of a Spectrum Transport Module (STM), a Linear Power Amplifier (LPA) module, WDM
remote module (accessory), CWDM remote module (accessory), and either an outdoor cabinet
or a indoor mounting shelf.
Several types of outdoor cabinets are available. Each outdoor cabinet is weather-tight but
contact with salt-air mist should be avoided as it may degrade the MTBF of the product. Outdoor cabinets can be mounted from a flat-vertical surface or a utility pole (requires pole-mount
kit). Slots are provided within each cabinet for mounting the STM and LPA modules and also
the WDM or CWDM remote modules. Storage spools are provided within the cabinet for
storing sh ort len gths of exces s fiber s lack. Speci fied cabi nets include a tray wi th a heated bas e
for mounting a back-up battery (accessory item).
A indoor mounting shelf for indoor use is also available. The indoor mounting shelf is designed
for installation in a non-condensing indoor environment such as inside a wiring closet or within
an environmentally-controlled cabinet. The indoor mounting shelf installs in a standard EIA or
WECO, 19- or 23-inch, equipment rack. Slots are provided within the mounting shelf for
mounting the STM and LPA modules and also the WDM or CWDM remote modules.
Page 1-10
© 2004, ADC Telecommunications , Inc.

SECTION 2: DESCRIPTION
Content Page
1 INTRODUCTION. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-3
2 HOST UNIT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-3
2.1 Primary Components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-3
2.2 Mounting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-3
2.3 Fault Detection and Alarm Reporting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-4
2.4 RF Signal Connections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-4
2.5 RF Signal Level Adjustments. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
2.6 Propagation Delay . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-5
2.7 Optical Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-5
2.8 Controller Area Network Interface Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-5
2.9 Service Interface Connection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
2.10 Auxiliary Interface Connector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
2.11 Powering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-6
2.12 Cooling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-6
2.13 User Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-6
3 SPECTRUM TRANSPORT MODULE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-8
3.1 Primary Components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-8
3.2 Mounting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-9
3.3 Fault Detection and Alarm Reporting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-9
3.4 Antenna Cable Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-10
3.5 RF Signal Level Adjustment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-10
3.6 Optical Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-10
3.7 Service Interface Connection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-10
3.8 Auxiliary Interface Connection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-10
3.9 Powering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-10
3.10 Cooling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-11
3.11 User Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-11
4 35 WATT LINEAR POWER AMPLIFIER. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-13
4.1 Primary Components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-13
4.2 Mounting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-14
4.3 Fault Detection and Alarm Reporting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-14
4.4 Powering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-14
4.5 Cooling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-14
4.6 User Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-14
5 REMOTE UNIT MOUNTING SHELF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-16
5.1 Indoor Mounting Shelf . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-16
6 SLIM-STYLE REMOTE UNIT CABINETS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-17
6.1 Slim-Style Single-STM Cabinet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-18
6.2 Slim-Style Dual-STM Cabinet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-20
7 ACCESSORY ITEMS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-23
7.1 Remote Unit Back-up Battery Kit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-23
7.2 Wavelength Division Multiplexer System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-24
ADCP-75-179 • Preliminary Issue A • September 2004 • Section 2: Description
© 2004, ADC Telecommunications , Inc.
Page 2-1

ADCP-75-179 • Preliminary Issue A • September 2004 • Section 2: Description
7.3 Coarse Wavelength Division Multiplexer System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2- 25
8 DIGIVANCE ELEMENT MANAGEMENT SYSTEM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-26
8.1 Digivance EMS Primary Components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-26
8.2 Software Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-28
8.3 Computer Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-28
8.4 Digivance EMS Computer Interface Connections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-28
8.5 Digivance EMS User Interfaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-29
9 SPECIFICATIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-31
_________________________________________________________________________________________________________
Page 2-2
© 2004, ADC Telecommunications , Inc.

1 INTRODUCTION
This section describes the basic components of a typical Digivance 800/900 MHz SMR LRCS
system including the Host Unit (HU) and Remote Unit (RU). The HU consists of a single rackmount chassis. The RU consists of a Spectrum Transport Module (STM); a 35 Watt Linear
Power Amplifier (LPA) module; and either an outdoor cabinet or an indoor mounting shelf.
Also described in this section are various accessory items that may be used with the HU and RU
including the Wavelength Division Multiplexer (WDM) system, Coarse Wavelength Division
Multiplex er (CWDM) system, and RU back-up battery kit.
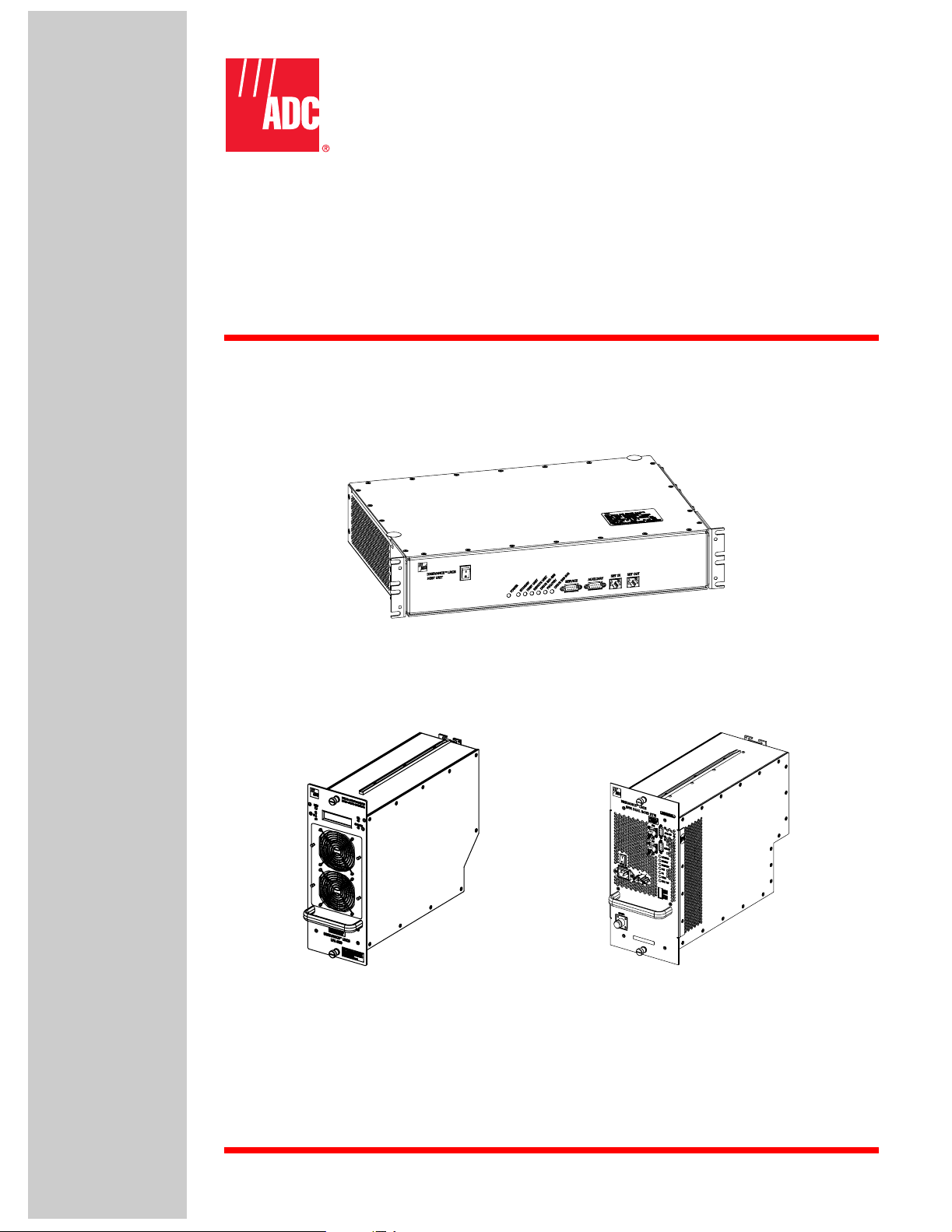
2 HOST UNIT
The HU, shown in Figure 2-1, provides the following basic functions:
• Provides an adjusta ble RF interface with the BTS.
• Provides a fiber optic interface with the RU.
• Digitizes the two forward path composite RF signals.
• Converts the two digitized forwar d path RF signals to a digital optical signal.
• Converts the digitized reverse path optical signal to two digitized RF signals.
• Converts the two digitized re verse path RF signals to two composite RF signals.
• Sends alarm information to an external alarm system through relay contact closures
• Provides an RS-232 interface for connecting the EMS computer.
• Provides an RS-232 interface for an auxiliary communications link with remote equipment.
• Provides a CAN interface for networking multiple HUs.
ADCP-75-179 • Preliminary Issue A • September 2004 • Section 2: Description
2.1 Primary Components
The HU consists of an electronic circuit board assembly and a fan assembly that are mounted
within a powder-paint coated sheet metal enclosure. The enclosure provides a mounting point
for the circuit board and fan assemblies and controls RF emissions. The only user-replaceable
component is the fan assembly. The HU is designed for use within a non-condensing indoor
environment such as inside a wiring closet or cabinet. The RF connectors, optical connectors,
alarm output connectors, DC power terminal strip, and grounding lug are mounted on the HU
rear panel. The On/Off power switch, LED indicators, service interface connector, and
Controller Area Network (CAN) connectors are mounted on the HU front panel.
2.2 Mounting
The HU is intended for rack-mount applications. A pair of reversible mounting brackets is
provided that allow the HU to be mounted in either a 19-inch or 23-inch EIA or WECO
equipment rack. When installed, the front panel of the HU is flush with the front of the rack.
Screws are provided for securing the HU to the equipment rack.
© 2004, ADC Telecommunications , Inc.
Page 2-3

ADCP-75-179 • Preliminary Issue A • September 2004 • Section 2: Description
17.1 INCHES
(433 mm)
3.5 INCHES
(88 mm)
12.2 INCHES
(311 mm)
Figure 2-1. Host Unit
2.3 Fault Detection and Alarm Reporting
FRONT PANEL
MOUNTING
BRACKET
(BOTH SIDES)
20020-A
The HU detects and reports various internal and external faults including host unit fault, optical
fault, power fault, temperature fault, and RF fault. Various front panel Light Emitting Diode
(LED) indicators turn from green to red or yellow if a fault is detected. A set of alarm contacts
(normally open and normally closed) are provided for reporting an alarm to an external alarm
system when a fault is detected. Both major alarm (system operation se riously affected) and
minor alarm (system operati on not affected or only slightly degraded) contacts are provided.
Fault and alarm information may also be accessed locally through the EMS software GUI or
remotely through the NOC/NEM interface or SNMP interface. An alarm history file is
maintained by the EMS software so that a record is kept of all alarms as they occur. This is
useful when an alarm is reported and cleared before the reason for the alarm can be determined.
The status of the HU, the alarm state (major or minor), and other alarm information is
summarized and repor ted over the service interface, the CAN interface, and the optical interface
to the RU. In addition, the status of the RU is transmitted to the HU over the optical interface
and reported ove r the service interface and the CAN interfa ce.
2.4 RF Signal Connections
The RF signal connections between the HU and the EBTS are supported through four N-type
female connectors. Two connectors are used for the forward path RF signals. The other two
connectors are used for the reverse path RF signals. In most installations, it is usually necessary
to install external attenuators to support the RF interface between the HU and the EBTS. The
HU should be as close as possible to the EBTS to minimize coaxial cable losses.
Page 2-4
© 2004, ADC Telecommunications , Inc.

2.5 RF Signal Level Adjustments
The HU is equipped with several attenuators for adjusting the signal levels of the forward and
reverse path RF signals. The attenuators provide an attenuation adjustment range of 0 to 31 dB
and can be set in 1 dB increments. The attenuators are software controlled and are adjusted
through the EMS software GUI, NOC/NEM interface, or SNMP interface.
The host forward path attenuators adjust the level of the two input RF signals to the HU.
Using the forward path attenuator, an input signal with a nominal composite signal level of –12
dBm to –43 dBm can be adjusted to produce maximum power output. Additional external
attenuation is req uired if the input signal level is greater than –12 dBm.
The host reverse pa th attenuators adjust the level of the two output RF signals from the HU
and will add from –1 dB of gain (attenuator set to 31 dB) to +30 dB of gain (attenuator set to 0
dB) to the two RF output signals at the HU.
2.6 Propagation Delay
The HU forward and reverse path propagation delays may be adjusted in 0.1 µsec increments
within a range of 0 to 63 µs. The propagation delay is software controlled and may be adjusted
through the EMS softwa re GUI, NOC/NEM interface, or SNMP interface.
ADCP-75-179 • Preliminary Issue A • September 2004 • Section 2: Description
2.7 Optical Connection
Optical connections between the HU and the RU (STM) are supported through two SC-type
optical connector ports. One port is used for the forward path optical signal connection and the
other port is used for the reverse path optical signal connection.
2.8 Controller Area Network Interface Connection
Controller Area Network (CAN) interface connections between multiple HUs are supported by
a pair of RJ-45 jacks. One of the jacks is designated as the network IN port and the other jack is
designated as the network OUT port. The CAN interface allows up to 24 HUs to be connected
together (in daisy- chain fashion) and controlled through a single EMS computer.
2.9 Service Interface Connection
The service interface connection between the HU and the EMS computer is supported by a
single DB-9 female conne ctor. The ser vice connector provides an RS-232 DTE inte rface. When
multiple HUs are networked together, the supporting EMS computer may be connected to the
service connector of any one of the networked HUs.
2.10 Auxiliary Interface Connector
An auxiliary communication link is provided between the HU and the STM for customer use.
The auxiliary interface is supported by a single DB-9 female connector. The auxiliary connector
provides an RS-232 DTE interface. The auxiliary communications link can be used to remotely
monitor and control other network equipment t hat may be located at the remote unit site such as
the antenna.
© 2004, ADC Telecommunications , Inc.
Page 2-5

ADCP-75-179 • Preliminary Issue A • September 2004 • Section 2: Description
2.11 Powering
The HU is powered by ± 21 to ± 60 VDC power (nominal ± 24 or ± 48 VDC). The power is fed to
the HU through a screw-down type terminal strip located on the rear side of the unit. Power to
the HU must be supplied through a fuse panel such as the PowerWorx GMT Series Fuse Panel
(available separately). The power circuit for each HU must be protected with a 3 Amp GMT
fuse. An On/Off switch is provided on the HU front panel.
2.12 Cooling
Continuous airflow for cooling is provided by dual fans mounted on the right side of the HU
housing. A minimum of 3 inches (76 mm) of clearance space must be provided on both the left
and right sides of the HU for air intake and exhaust. An alarm is generate d if a high temperature
condition (>50º C/122º F) occurs. The fans may be field-replaced if either fan fails.
2.13 User Interface
The HU user interface consi sts of the v arious connectors, switches, termi nals, and LEDs that are
provided on the HU front and rear panels. The HU user interface points are indicated in
Figure 2-2 and described in Table 2-1.
FRONT VIEW
(13) 806-824
REVERSE
(14) 896-901
REVERSE
REAR VIEW
Page 2-6
© 2004, ADC Telecommunications , Inc.
(1) DC POWER
ON/OFF SWITCH
(15) 851-869
FORWARD
OUTPUT CONNECTOR
(REFERENCE
ITEMS 2 - 8)
LED INDICATORS
(16) 935-940
FORWARD
(19) ALARM
(9) SERVICE
INTERFACE
CONNECTOR
(17) DC POWER
TERMINAL STRIP
(11) NET IN
CONNECTOR
(10) AUXILIARY
CONNECTOR
Figure 2-2. Typical Host Unit User Interface
(12) NET OUT
CONNECTOR
(18) COVER PLATE
(21)
(20)
REV
FWD
(22)
GROUNDING
STUD
20021-A

ADCP-75-179 • Preliminary Issue A • September 2004 • Section 2: Description
Table 2-1. Host Unit User Interface
REF
NO
USER INTERFACE
DESIGNATION
DEVICE
1I/0 On/Off rocker
switch
2 P OW E R Mult i- color ed L ED
(green/yellow)
3 STANDBY Multi-colored LED
(green/yellow/red)
4 HOST UNIT Multi-colored LED
(green/yellow/red)
5 REMOTE UNIT Multi-colored LED
(green/yellow/red)
6 DRIVE 851–869 Multi-colored LED
(green/yellow/red)
7FWD/REV
(PORT 1/P ORT 2)
Mult i- c o lored LED
(green/red)
8 DRIVE 935–940 Multi-colored LED
(green/yellow/red)
9 SERVICE DB-9 connector
(female)
FUNCTIONAL
DESCRIPTION
Provides DC power on/off control.
Indicates if the HU is powered (green) or unpowered (off). See Note.
Indicate s if the system is in the Normal (off),
Standby (blinking green), Test (blinking red), or
Program Load (blinking yel low) state. See Note.
Indicates if the HU is normal (green), ov erheated
(yellow), or fault y (red). See Note.
Indica tes if no alar ms (green), a minor alarm
(yello w) , o r a majo r alar m ( re d) is r ep ort ed b y the
RU. See Note.
Indicates if the level of the 851–869 MHz RF
input signal to the HU is normal (green), low
(yellow), or high (red). See Note.
Indicates if the reverse/forward pat h optical signals from the STM/HU are normal (green), if no
signals are detected (red), or if excessive errors
are detected (red). See Note.
Indicates if the level of the 935–940 MHz RF
input signal to the HU is normal (green), low
(yellow), or high (red). See Note.
Connection point for the RS-232 service interface cable.
10 AUXILIARY DB-9 connector
(female)
Connection point for the RS-232 auxiliary interface cable.
11 NET IN RJ-45 jack (female) Connection point for the CAN interface input
cable.
12 NET OUT RJ-45 jack (female) Connection point for the CAN interface output
cable.
13 806–824 REVERSE N-type female RF
coaxia l connector
14 896–901 REVERSE N-type female RF
coaxia l connector
15 851–869 FORWARD N-type female RF
coaxia l connector
16 935–940 FORWARD N-type female RF
coaxia l connector
17 POWER 24–48 VDC Screw-type terminal
Output connection point for the 806–824 MHz
reverse path RF coaxial cable.
Output connection point for the 896–901 MHz
reverse path RF coaxial cable.
Input connection point for the 851–869 MHz forward path RF c oa x ial cable .
Input connection point for the 935–940 MHz forward path RF c oa x ial cable .
Connection point for the DC power wiring.
strip
18 No designation Cover plate Covers the mounting slot for the wavelength divi-
sion multiplexer module.
© 2004, ADC Telecommunications , Inc.
Page 2-7

ADCP-75-179 • Preliminary Issue A • September 2004 • Section 2: Description
Table 2-1. Host Unit User Interface, continued
REF
NO
19 ALARM OUTPUT Screw-type terminal
20 FWD (PORT 1) SC connector
21 REV (PORT 2) SC connector
22 Chassis ground stud Connection point for a chassis grounding wire.
Note: A more detailed des cription of LED operation is provided in Section 4.
USER INTERFACE
DESIGNATION
3 SPECTRUM TRANSPORT MODULE
The STM, shown in Figure 2-3, provides the following basic functions:
DEVICE
connector (14–26
AWG)
(single-mode)
(single-mode)
FUNCTIONAL
DESCRIPTION
Connection point for an external alarm system.
Includes normally open (NO), normally closed
(NC), and common (COM) wiring connections.
Output connection point for the forward path
optical fiber.
Input connection point for the reverse path primary optical fibe r.
• Provides an RF interfa ce (antenna port) for the remote antenna(s).
• Provides an optical interface for the HU.
• Converts the digitized forward path optical signal to digitized RF signals.
• Converts the digitized forward path RF signals to two composite RF signals.
• Digitizes the two reverse path composite RF signals.
• Converts the digitized re verse path RF signals to a digitized optical signal.
• Provides an RS- 2 32 interface for connecti n g a local EM S computer.
• Pro vide s an RS- 232 inte rf ace for an auxiliary communications link with remote equipment.
• Trans ports alarm, control, and monitoring information to the HU via the optical interface.
• Accepts AC power input and battery power input.
• Accepts external alarm input.
3.1 Primary Components
The STM consists of an electronic circuit board assembly, power supply, quadraplexer, and fan
assembly that are mounted within a powder-paint coated sheet metal enclosure. The metal
enclosure provides a mounting point for the electronic components and controls RF emissions.
Except for the fan unit, the electronic components are not user replaceable. The STM is
designed for use within the RU outdoor cabinet or indoor mounting shelf. Except for the LPA
interface connector, all controls, connectors, indicators, and switches are mounted on the STM
front panel for easy access. A carrying handle is provided on the front of the STM to facilitate
installation and transport.
Page 2-8
© 2004, ADC Telecommunications , Inc.

3.2 Mounting
The STM mounts within the RU outdoor cabinet or indoor mounting shelf. Runners on the top
and bottom of the STM mesh with tracks in the cabinet or mounting shelf. The runners and
tracks guide the ST M into the ins talled po sition . The e lectri cal inte rface betwe en t he STM and
LPA is supported by a D-sub female connector located on the rear side of the STM. A
corresponding D-sub male connector mounted at the rear of the RU cabinet or indoor mounting
shelf mates with the STM connector. Captive screws are provided for securing the STM in the
installed posit ion.
ADCP-75-179 • Preliminary Issue A • September 2004 • Section 2: Description
Figure 2-3. Typical Spectrum Transport Module
3.3 Fault Detection and Alarm Reporting
The STM detects and reports various faults including remote unit fault, optical fault, power
fault, temperature fault, power amplifier fault, and external (cabinet door open) fault. Various
front panel Light Emitting Diode (LED) indicators turn from green to red or yellow if a fault is
detected. The statu s of the STM , the al arm state (m ajor o r mino r), and ot her alarm informa tion
is summarized and reported over the optical interface to the HU and also over the service
interface. In addition, the alarm state of the HU is received over the optical interface and
reported to the service interface. Fault and alarm information may be accessed locally through
the EMS softwar e GU I or remote l y t hrou gh th e NOC /NEM inter face or SNMP in t e r fa ce.
20023-B
Page 2-9
© 2004, ADC Telecommunications , Inc.

ADCP-75-179 • Preliminary Issue A • September 2004 • Section 2: Description
3.4 Antenna Cable Connection
The antenna cable connection between the STM and the antenna is supported through a single
N-type female connector. The single connector is used for the antenna cable which carries both
the forward and primary reverse path RF signals.
3.5 RF Signal Level Adjustment
The STM is equipped with digital attenuators for adjusting the signal level of the forward path
RF output signals. The remote forward p a th a ttenuators adjust the level of the two output RF
signals at the RU antenna port and will add from 0 to 31 dB of attenuation to the output signal
level. The attenuator can be set in 1 dB increments. The attenuator is software controlled and is
adjusted through the EMS software GUI, the NOC/NEM interface, or SNMP interface.
3.6 Optical Connection
Fiber optic connections between the STM and the HU are supported through two SC-type
optical connector ports. One port is used for the forward path optical signal connection and the
other port is used for the reverse path optical signal connection.
3.7 Service Interface Connection
The service interface connection between the STM and a local laptop computer loaded with the
EMS software is supported by a single DB-9 female connector. The service interface connector
provides an RS-232 DTE interface. The STM service interface supports local communications
with both the STM and the corresponding HU.
3.8 Auxiliary Interface Connection
An auxiliary communication link is provided between the HU and the STM for customer use.
The auxiliary interface is supported by a single DB-9 female connector. The auxiliary connector
provides an RS-232 DTE interface. The auxiliary communications link can be used to remotely
monitor and control other network equipment t hat may be located at the remote unit site such as
the antenna.
3.9 Powering
The STM is powered by 120 or 240 VAC (50 or 60 Hz) power which is supplied through a
three-conductor AC power cord. The power cord is provided with the RU outdoor cabinet or
indoor mounting shelf. The power cord connects to a 3-wire AC c onne ctor mounted on the f ront
panel. A switch on the STM front panel provides AC power On/Off control.
The STM (and the connected LPA) may be powered by a 24 VDC back-up battery system
which is available as an accessory kit. A connector is provided on the STM front panel for the
back-up battery system wiring harness connection.
Page 2-10
© 2004, ADC Telecommunications , Inc.

3.10 Cooling
Continuous air-flow for c ooling is provide d by a single fan mounted on the rear side of the STM
housing. An alarm is generated if a high temperature condition (>50º C/122º F) occurs. If the
temperature falls below 32º F (0º C), the fan automatically shuts off. The fan may be field
replaced if it fails.
3.11 User Interface
The STM user interface consists of the various connectors, switches, and LEDs that are
provided on the STM front panel. The S TM user interface points are indicated in Figure 2-4 and
described in Table 2-2.
ADCP-75-179 • Preliminary Issue A • September 2004 • Section 2: Description
(1) FWD
CONNECTOR
(2) REV
CONNECTOR
(3) ON/OFF
SWITCH
(4) AC POWER
CONNECTOR
(5) DC POWER
CONNECTOR
Figure 2-4. Typical Spectrum Transport Module User Interface
(6) AUXILIARY
CONNECTOR
(7) SERVICE
CONNECTOR
(8-14) LED
INDICATORS
(15) ALARM
CONNECTOR
(16) ANTENNA
CONNECTOR
20022-B
© 2004, ADC Telecommunications , Inc.
Page 2-11
 Loading...
Loading...