


1
SERVO DRIVE
A3 SERIES INSTRUCTION MANUAL
Preface ................................................................................................................................ 2
1. About the instruction manual .................................................................................... 2
2. Confirm the following items before unpacking. ........................................................ 2
3. Safety precautions .................................................................................................... 2
1. Product introduction and model selection ................................................................. 6
1.1 Introduction of nameplate and model name (For servo motor and drive) ............. 6
1.2 Parts name of servo motor and drive ..................................................................... 7
1.3 Model name of servo drive and motor.................................................................... 8
1.4 Model selection of peripheral braking resistor ....................................................... 8
1.5 Selection of cables and connector accessories for A3 products ........................... 9
2. Installation and size of servo motor and drive ......................................................... 10
2.1 Installation environment conditions ...................................................................... 10
2.2 Dustproof and waterproof ..................................................................................... 10
2.3 Installation method and space .............................................................................. 10
2.4 Dimensions of servo motor................................................................................... 12
2.5 Dimensions of servo drive .................................................................................... 17
3. Wiring explanation for servo motor and drive ......................................................... 19
3.1 Wiring diagram ..................................................................................................... 19
3.2 Drive connector and pins arrangement ................................................................ 22
3.3 Terminal arrangement and wiring color of motor connector ................................. 24
4. Parameter Description ................................................................................................ 27
5. Operation ...................................................................................................................... 50
5.1 Preface ................................................................................................................. 50
5.2 Position control mode (Pulse position command input) ....................................... 55
5.3 Speed control mode (Analog speed command input) .......................................... 66
5.4 Speed control mode (Internal speed command) .................................................. 71
5.5 Torque control mode (Analog torque command input) ......................................... 75
5.6 Position control mode(Internal position command) .............................................. 81
5.7 Description of User I/O connector (CN1) terminal arrangements ........................ 82
6. Troubleshooting and countermeasures .................................................................... 90
6.1 Alarm display ........................................................................................................ 90
6.2 Alarm handling and alarm reset ........................................................................... 90
6.3 Troubleshooting .................................................................................................... 93

2
Thank you for purchasing the Action Technology products.
This Instruction Manual provides instructions for advanced use of the A3 series servo motors.
●Before use, read this manual and manuals of relevant products fully to acquire proficiency in handling and operating the
product.
●Please read the safety precautions before using.
●Store this manual in a safe place so that you can take it out and read it whenever necessary.
●As for products under development, specifications are subject to change without notice.
Preface
Incorrect operation and handling, couldn’t have a full display of the various performance that designed, and may cause
hazardous conditions and shorten the service life. Please operate the product correctly before you have read through the
instruction manual correctly.
1. About the instruction manual
○,1We make an effort to perfect this instruction manual, but if you have found some mistakes or uncertain points, please
contact Action Technology at any time.
○,2Please note the following items on the instruction manual
●Danger exists as it’s the high-voltage device.
●There are some residual voltage on the terminals or the units after power OFF and it is dangerous.
●High temperature locally
●Disassembling is prohibited.
○,3The product specifications and functions may change and increase, as the product performance upgraded. They are
subject to change without notice.
○,4Plan to obtain the Certificate of safety specification for the product’s device, please consult our sales representative.
○,5To extend the service life of motor and drive, it is necessary to use it under the correct conditions. Please follow the
instruction manual for details.
○,6The latest information should be recorded in the instruction manual and manual will be updated accordingly. If you need
the latest version, please contact the Action Technology.
○,7Without the approval of company, it is forbidden to reprint some or all of the instruction manual.
2. Confirm the following items before unpacking.
●Check if the products are the ones you ordered.
●Check if there are some damage to the products during transportation.
●Any questions, please contact the Action Technology.
3. Safety precautions
Please pay attention to the flowing safety precautions anywhere and any time during acceptance inspection, installation,

3
wiring, operation and maintenance.
Indicates that incorrect handling may result in death or severe injury.
Indicates that incorrect handling may result in medium or slight personal injury or physical damage.
Indicates “Prohibitions”(Indicates what must not be done.)
Indicates “Forced”.(Indicates what must be done.)
Installing and wiring
Do not connect the motor to the commercial power.
To prevent fire or malfunction.
Do not place the combustibles around the servo motor and drive.
To prevent fire.
Be sure to protect the drives through the case, and leave specified
clearances between the case or other equipment and the drive.
To prevent electric shock, fire or
malfunction.
Install it at the place free from excessive dust and dirt, water and oil mist
To prevent electric shock, fire ,
malfunction or damage
Install the equipment to incombustibles, such as metal.
To prevent fire.
Any person who is involved in wiring and inspection should be fully
competent to do the work.
To prevent electric shock.
FG terminal of motor and drive must be grounded.
To prevent electric shock.
Perform the wiring correctly after cut off the breaker.
To prevent electric shock, injury,
malfunction or damage
Have the insulation processing when connecting cables.
To prevent electric shock, fire or
malfunction.
Operation and running
During operation, never touch the internal parts of the drive.
To prevent burns or electric shock.
The cables should not be damaged, stressed loaded, or pinched.
To prevent electric shock, malfunction
or damage.
During operation, never touch the rotating parts of the servo motor.
To prevent injury.
Do not install the equipment under the conditions with water, corrosive
and flammable gas.
To prevent fire.
Do not use it at the location with great vibration and shock.
To prevent electric shock, injury or
fire.
Do not use the servo motor with its cable soaked in oil or water.
To prevent electric shock, malfunction
or damage
Operate the switches and wiring with dry hand.
To prevent electric shock, injury or
fire.
Do not touch the keyway directly when using the motor with shaft-end
keyway
To prevent injury.
Do not touch the motor and drive heat sink, as they are very hot.
To prevent burns or parts damaged.
Do not drive the motor by external drive.
To prevent fire.
Other safety instructions
Confirm the equipment’s safety after the earthquake happens.
To prevent electric shock, injury or
fire.
Installing and setting correctly to prevent the fire and personal injury when
To prevent injury, electric shock, fire,

4
earthquake happens.
malfunction or damage.
Provide an external emergency stop circuit to ensure that operation can
be stopped and power switched off immediately.
To prevent injury, electric shock, fire,
malfunction or damage.
Before wiring or inspection, turn off the power and wait for 5 minutes or
more.
To prevent electric shock.
Installing and wiring
Please follow the specified combination of the motor and drive.
To prevent fire or malfunction.
Do not touch the terminals of connector directly.
To prevent electric shock or
malfunction.
Do not block intake and prevent the foreign matters from entering into the
motor and drive.
To prevent electric shock or fire.
Fix the motor and have the test run away from the mechanical system.
After confirming the operation, the motor can be securely mounted to
mechanical system.
To prevent injury.
The servo motor must be installed in the specified direction.
To prevent injury or malfunction.
Install the equipment correctly in accordance with its weight and rated
output.
To prevent injury or malfunction.
Operation and running
Do not climb or stand on servo equipment. Do not put heavy objects on
equipment.
To prevent electric shock, injury, fault
or damage.
The parameter settings must not be changed excessively. Operation will
be instable.
To prevent injury.
When power is restored after an instantaneous power failure, keep away
from the machine because the machine may be restarted suddenly
(design the machine so that it is secured against hazard if restarted).
To prevent injury.
Keep it away from the direct sunlight.
To prevent malfunction.
Do not put strong impact on the motor, drive and motor shaft.
To prevent malfunction.
The electromagnetic brake on the servo motor is designed to hold the
servo motor shaft and should not be used for ordinary braking.
To prevent injury or malfunction.
Do not install or operate a faulty servo motor or drive.
To prevent injury, electric shock or fire
Check the power specification.
To prevent fault.
The electromagnetic brake may not hold the servo motor shaft. To ensure
safety, install a stopper on the machine side.
To prevent injury.
A sudden restart is made if an alarm is reset with the run signal on.
To prevent injury.
Connect the relay for emergency stop and for brake in series.
To prevent injury or malfunction.
Transportation and storage
Do not subject the equipment to the place with rain, waterdrop, poisonous
gases or liquids.
To prevent malfunction.
Do not carry the servo motor by the cables, shaft or encoder during
transportation.
To prevent injury or malfunction.

5
Do not drop or dump the motor during transportation and installation.
To prevent injury or malfunction.
Store the unit in a place in accordance with the instruction manual.
To prevent malfunction.
Other safety instructions
Please dispose the battery according to your local laws and regulations.
When disposing of the product, handle it as industrial waste.
Maintenance and inspection
Do not disassemble and/or repair the equipment on customer side.
To prevent malfunction.
Do not turn on or switch off the main power frequently.
To prevent malfunction.
Do not touch the servo drive heat sink, regenerative resistor, servo motor
etc. Their temperatures may be high while power is on or for some time
after power-off.
To prevent burns or electric shock.
When the drive become faulty, switch off the control circuit and main
power.
To prevent fire.
If the servo motor is to be stored for a long time, switch off the power.
To prevent mis-operation and injury.
Warranty period
The term of warranty for the product is 12 months from the date of manufacture. It’s exceptional to brake motors as they are
warranted when acceleration / deceleration times is not beyond the specified service life.
Warranty coverage
This warranty applies only when the condition, method, environment, etc. of use are in compliance with the terms and
conditions and instructions that are stated in the instruction manual and user manual for the Product.
However, even during warranty period, the repair cost will be charged on customer in the following cases.
1) A failure caused by improper storing or handling, repair and modification.
2) A failure caused by the parts which have dropped down or damaged during transportation
3) A failure caused when the products have been used beyond the product specification
4) A failure caused by external factors such as inevitable accidents, including but not limited to fire, earthquake, lightning
stroke, windstorm disaster, flood, salt damage, abnormal fluctuation of voltage and other natural disaster.
5) A failure caused by the intrusion of water, oil, metal and other foreign matters.
The warranty coverage is only for the product itself. We assume no responsibilities for any losses of opportunity and/or profit
incurred by you due to a failure of the Product.
6
1. Product introduction and model selection
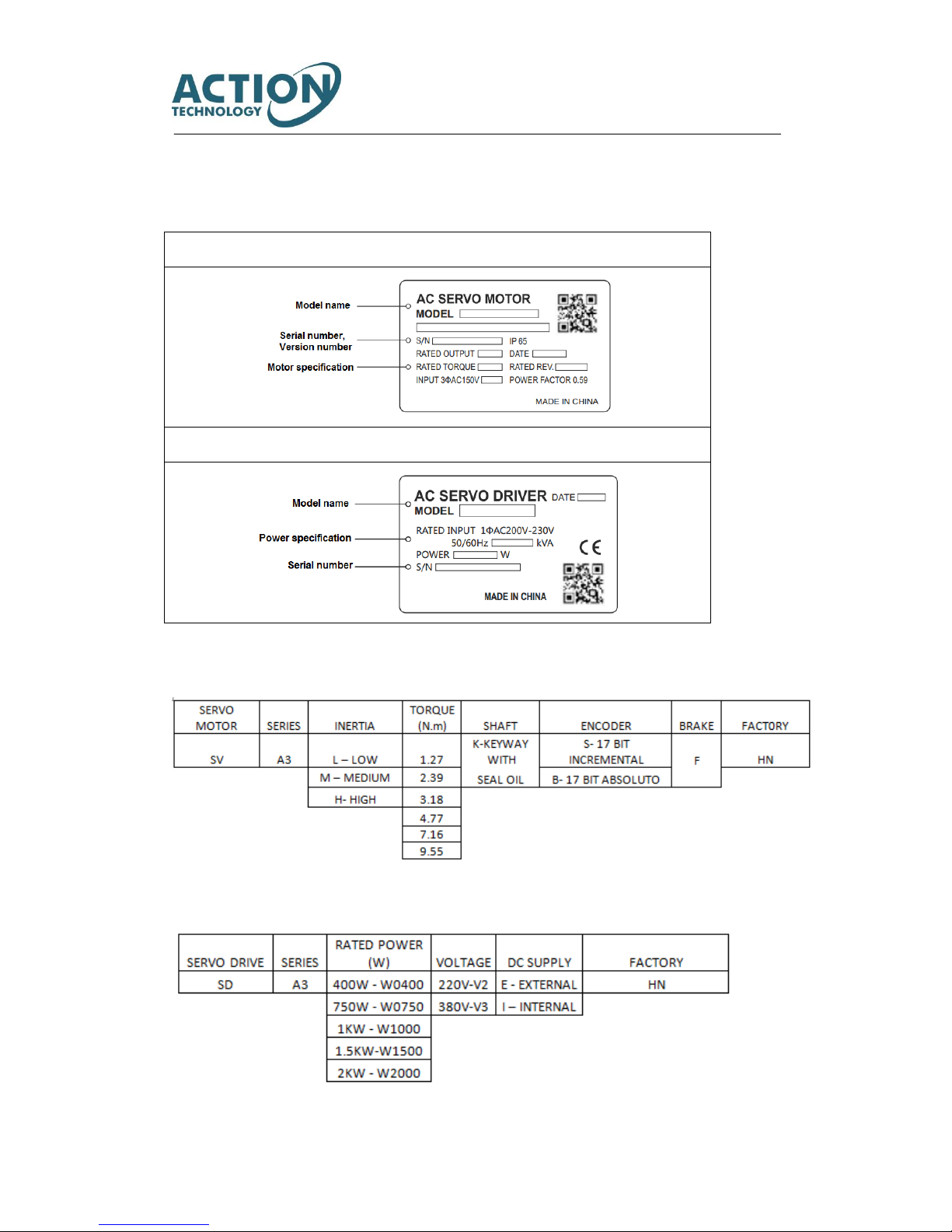
1.1 Introduction of nameplate and model name (For servo motor and drive)
Servo motor nameplate
Servo driver nameplate
Model name
1) Servo motor
2) Servo drive

7
1.2 Parts name of servo motor and drive
Figure 1.2.1 Parts name of servo motor
Figure 1.2.2 Parts name of servo drive.

8
1.3 Model name of servo drive and motor
Capacity
Motor model
SV-A3□□□□□-*HN**
Motor size
(Flange
installation size)
Drive model
Drive size
400W
Low inertia
L1.27
60
SD-A3W0400V2E-HN
Frame A
High inertia
H1.27
750W
Low inertia
L2.39
80
SD-A3W0750V2E-HN
High inertia
H2.39
1kW
Middle inertia
M4.77
130
SD-A3W1000V2I-HN
Frame B
High inertia
H4.77
1.5kW
Middle inertia
M7.16
SD-A3W1500V2I-HN
High inertia
M7.16
2kW
Middle inertia
M9.55
SD-A3W2000V2I-HN
1.4 Model selection of peripheral braking resistor
Rated output
400W
750W
1kW
1.5 kW
2 kW
Resistance
40~50Ω
40~50Ω
30Ω
30Ω
20Ω
Allowable
power
20W
20W
40W
40W
60W
The Status monitoring mode on the setting panel can be used to confirm whether a regenerative resistor is needed. Select
「St_REG」on the setting panel to display 「in00_-」. When the display changes from 「in00_-」 to 「in00_A」, it means the
regenerative resistor is needed. For details, refer to [5.4 Status display mode [Regenerative resistor]].
Starting from low speed operation (20% of the max. speed) to the desired operation and observing if the display value
changes from 「in00_-」 to 「in00_A」 If 「in00_A」displays, a regenerative resistor is needed.
If the regenerative resistor is needed, refer to the installation of regenerative resistor. The use of regenerative resistor cannot
necessarily guarantee the performance. When heating temperature is too high, please increase the resistance, or the
permissible power.

9
1.5 Selection of cables and connector accessories for A3 products
● For 750W or less
Items
Usage
Model name
Remark
1
Connector for drive and motor
Power connector - SY-A3CNPW750W-HN
2
Cable for drive and motor
Power cable - SY-A3CBPW750W0.5M-HN
Length: 0.5m
Power cable - SY-A3CBPW750W1.5M-HN
Length: 1.5m
Power cable - SY-A3CBPW750W3M-HN
Length: 3m
Power cable - SY-A3CBPW750W4M-HN
Length: 4m
Power cable - SY-A3CBPW750W5M-HN
Length:5m
Power cable - SY-A3CBPW750W6M-HN
Length:6m
Power cable - SY-A3CBPW750W7M-HN
Length:7m
Power cable - SY-A3CBPW750W10M-HN
Length: 10m
3
Brake connector
Not available
4 Encoder cable terminal
Encoder connector SY-A3CNEN750W-HN
5
Encoder cable
- SY-A3CBEN750W0.5M-HN
Length: 0.5m
- SY-A3CBEN750W1.5M-HN
Length: 1.5m
- SY-A3CBEN750W3M-HN
Length: 3m
- SY-A3CBEN750W5M-HN
Length:5m
- SY-A3CBEN750W10M-HN
Length: 10m
6
Encoder cable for absolute
Not available
● 1KW or more
Items
Usage
Model name
Remark
1
Connector for drive and motor
Power connector SY-A3CNPW0102K-HN
2
Cable for drive and motor
Power cable - SY-A3CBPW0102K0.5M-HN
Length: 0.5m
Power cable - SY-A3CBPW0102K1.5M-HN
Length: 1.5m
Power cable - SY-A3CBPW0102K3M-HN
Length: 3m
Power cable - SY-A3CBPW0102K5M-HN
Length:5m
Power cable - SY-A3CBPW0102K10M-HN
Length: 10m
3
Brake connector
Not available
4
Encoder cable terminal
Encoder connector SY-A3CNEN0102K-HN
5
Encoder cable
- SY-A3CBEN0102K0.5M-HN
Length: 0.5m
- SY-A3CBEN0102K1.5M-HN
Length: 1.5m
- SY-A3CBEN0102K3M-HN
Length: 3m
- SY-A3CBEN0102K5M-HN
Length:5m
- SY-A3CBEN0102K10M-HN
Length: 10m

10
6
Encoder cable for absolute
- Not available
Length: 0.5m
- Not available
Length: 1.5m
- Not available
Length: 3m
- Not available
Length:5m
- Not available
Length: 10m
7
50P pulse connector
Pulse connector
2. Installation and size of servo motor and drive
2.1 Installation environment conditions
About the environmental conditions, make sure to follow the company’s instructions. If you need to use the product outside the
scope of the environmental conditions, please consult ACTION TECHNOLOGY in advance.
○,1 Keep it away from the direct sunlight.
○,2 Drive must be installed in the cabinet.
○,3 Keep it away from the water, oil (cutting oil, oil mist) and moisture.
○,4 Do not install the equipment under the conditions with water, corrosive and flammable gas.
○,5 Free from the dust, iron powder, cutting powder and so on.
○,6 Keep it away from the area with high temperature, excessive vibration and shock.
2.2 Dustproof and waterproof
The servo drive is non-waterproof structure. Protection level of motor (excluding the connector) is IP65 according to IEC
34-5(International Electrotechnical Commission).
2.3 Installation method and space
Impact & load
①The impact that the motor can stand should be less than 200m/s2(20G). Don’t apply excessive impact load to the motor
during transporting, installing and disassembling. And do not hold encoder, cable and connector to transport the motor.
②The pull claw device must be used when removing the belt pulley and coupler from the motor
Combination with mechanical system
①The motor specification in the user manual has specified the permissible load to the motor shaft. Exceeding the permissible
load will shorten the shaft life and cause damage to the shaft. Please use coupling which could fully absorb eccentric load.
②The stress on the encoder cable should be less than 6kgf during assembling.
③The bending radius of power cable and encoder cable should be R20mm and more.
Installation direction and clearance of drives
Leave sufficient space around the drive to ensure the heat dissipation and convection in the cabinet when installing the drive.
●Install the drives in the vertical direction. Please use two M5 screws to fix the drive, master drive and slave drive

11
respectively which is less than 800W Please use three M5 screws to fix the drive and master drive respectively which is
more than 1kW.
●In order to ensure that surrounding temperature between internal boards is not more than 55℃, cooling fan or cooler need
to be installed to reduce the temperature, when the drives are installed in the sealed cabinet.
●The temperature on the surface of cooling plate would be 30℃ higher than the surrounding temperature.
●Use heat-resistant material for the wiring and isolate wiring from the machine and other cables which are easily affected by
the temperature.
●The service life of servo drive depends on the temperature around the electrolytic capacitor. When the electrolytic capacitor
is close to the service life, the static capacity will decrease and internal resistance will increase. Consequently, it will lead to
overvoltage alarm, malfunction caused by noise and components damage. The service life of electrolytic capacitor is approx. 5
to 6 years under the condition 「average annual temperature 30℃, load rate 80% and operation of less than 20 hours a day on
average」
Additional instructions
①The motor shaft is covered with anti-rust oil before leaving factory. Please have the antirust treatment again to the shaft to
prevent it from rust when installing load.

12
②Never disassemble the encoder or motor.
③The GND of 24VDC input and the grounding cable of device can be connected to each other.
※Please use the same power supply for control voltage(24V and GND) and upper control device.
④Do not remove or maintain the encoder battery until the main power supply is switched OFF.
⑤After switching off the main power supply, please note that there is residual voltage of approx. 30 seconds on the power
components.
⑥Do not replace the fuse.
⑦The servo drives of more than 750W are installed with a cooling fan on the right side. Do not touch or block the ventilation
ports of servo drive
2.4 Dimensions of servo motor

13

14

15

16

17
2.5 Dimensions of servo drive

18

19
3. Wiring explanation for servo motor and drive
3.1 Wiring diagram
3.1.1 Wiring diagram

20
[Points for correct wiring]
※ 24VDC and 200VAC input (main circuit) power supply should be wired from the same 200VAC main power supply.
※ Do not access switch between 24VDC power supply and drive. If you need switch, put it on the 200VAC cable of 24VDC
input power supply.
※ A twisted-pair shielded cable should be used when I/O cable length is over 50cm.
※ The encoder cable should be less than 20m.
① Please note that there is high voltage in the solid line of wiring diagram when wiring and using.
② The broken lines in the wiring diagram indicates the non-dangerous voltage circuit.
3.1.2 Connection of servo drive and motor
Items
Description
Peripheral device
Conform to European EC Directive. Select the device which meets corresponding standards
and install them in accordance with User’s Manual.
Installation environment
Install the servo drive to the environment which conform to Pollution degree 2 or 1 of
IEC60664-1.
Power supply 1: 200~
230VAC (main circuit)
This product can be used under the conditions that conform to IEC60664-1 and overvoltage
category Ⅱ.
Power supply 2: 24VDC
♦ control power supply of drive
♦ I/O power supply
♦ Power supply for brake
release
The specification of 24VDC external power supply should satisfy the following conditions.
Using SELV power supply(※) and power less than 150W. This is the CE corresponding
conditions.
※SELV: safety extra low voltage
(Reinforced insulation is needed for safety extra low voltage, non-dangerous voltage and
dangerous voltage.)
Wiring
Please use withstand voltage cables which are equivalent to AWG18/600V or AWG14/600V
for motor power cable, encoder cable, AC220 input cable, FG cable and main circuit power
distribution cable under multi-axis drive structure respectively when drives are less than

21
750W or more than 1kW .
Breaker
Switch off the power supply to protect power cord when overcurrent occurs.
Make sure to use the breaker between power supply and interference filter that conforms to
IEC specification and UL recognition in accordance with the User manual.
Please use the breaker with leakage function recommended by ACTION TECHNOLOGY in
order to meet EMC standards.
Noise filter
To prevent the outside interference from power cables.
Please use the interference filter recommended by ACTION TECHNOLOGY in order to
meet EMC standards.
Magnetic contactor
Switch main power supply (ON/OFF). And use it after installing a surge absorber.
Surge absorber
Please use the surge absorber recommended by ACTION TECHNOLOGY in order to meet
EMC standards.
Interference filter for signal
cable / ferrite filter
Please use the interference filter recommended by ACTION TECHNOLOGY in order to
meet EMC standards.
Regenerative resistor
This product is not equipped with regenerative resistor.
The external regenerative resistor is necessary when the internal capacitor cannot absorb
more regenerative power. Confirm the regenerative status on the panel. When the
regenerative voltage alarm is ON, a regenerative resistor is needed.
For the reference specification of regenerative resistor, please refer to user manual.
Use a built-in thermostat and set overheat protect circuit.
Grounding
This product belongs to Class 1 and need grounding protection.
Using protection grounding terminal. Grounding should be executed by the case and cabinet
that conforms to EMC.
The following symbol indicates the protection grounding terminal.

22
3.2 Drive connector and pins arrangement
3.2.1 Drive connector terminal
Figure 3.2.1 Drive connector terminal
Table 3.2.1 Terminal arrangement of drive connector/ 750W or less
Name
Symbol
Pin No.
Signal name
Contents
Regenerative
resistance connection
B1/B2/L1
/L2
1
B1
P interface of regenerative resistor
2
B2
N interface of regenerative resistor
Single-phase 200VAC
input
4
Primary-power 1
L 5 Primary power 2
N
Motor power output
U/V/W
1 U Motor power U phase output
2 V Motor power V phase output
3 W Motor power W phase output
Encoder
CN2
1
VCC
Encoder power supply 5V output
2
GND
Signal grounding
3
NC
-
4
NC
-
5
+D
Encoder signal: data input/output
6
-D
Encoder signal: data input/output
-
FG
Connect SHIELD to the connector housing
PC communication
CN3
1
VBUS
USB power supply
2
D-
USB data-
3
D+
USB data+

23
4
NC - 5
GND
USB signal grounding
24V power supply and
communication
CN4
1
24V
Drive control power supply 24V input
2
G24
Drive control power supply GND input
3
485
485 signal from upper control device Multi-station
communication
4
/485
/485 signal from upper control device Multi-station
communication
5
SG
Communication signal grounding
External fan
CN14
1
24V
24V for external fan
2
G24
GND for external fan
3
NC - User I/O
CN1
Refer to “Operation”
Table 3.2.2 Terminal arrangement of drive connector/ 1kW or more
Name
Symbol
Pin No.
Signal name
Contents
Regenerative
resistance connection
-/B1/B2
1
-
- 2 B1
P interface of regenerative resistor
3
B2
N interface of regenerative resistor
Three-phase 200VAC
input
L1C/L2C
L1/L2/L3
1
L1C
Control power AC input
2
L2C
Control power AC input
3
L1
Primary power 1
4
L2
Primary power 2
5
L3
Primary power 3
(Do not connect it when single-phase used)
Motor power output
U/V/W
1 U Motor power U phase output
2 V Motor power V phase output
3 W Motor power W phase output
Encoder
CN2
1
VCC
Encoder power supply 5V output
2
GND
Signal grounding
3
NC - 4
NC - 5
+D
Encoder signal: data input/output
6
-D
Encoder signal: data input/output
-
FG
Connect SHIELD to the connector housing
PC communication
CN3
1
VBUS
USB power supply
2
D-
USB data-
3
D+
USB data+
4
NC
-
5
GND
USB signal grounding
24V power supply and
CN4 1 24V
Drive control power supply 24V input

24
communication
2
G24
Drive control power supply GND input
3
485
485 signal from upper control device Multi-station
communication
4
/485
/485 signal from upper control device Multi-station
communication
5
SG
Communication signal grounding
User I/O
CN1
Refer to “Chapter 5 Operation”
3.3 Terminal arrangement and wiring color of motor connector
3.3.1 Motor connector and pins arrangement (750W or less)
Figure: 3.3.1 Motor connector and pins arrangement
Table 3.3.1 Cable list (For motor of 750W or less)
Name
Cable
Motor power input
AWG18
Brake
note 1
AWG22
Encoder (Incremental)
Power supply:AWG22
Signal:AWG24
Encoder (Absolute)
Power supply:AWG22
Signal:AWG24
Note 1 For the motor with brake

25
Table 3.3.2 For the motor of 750W or less
Name
Pin
No.
Signal
name
Contents
Wiring color
Motor power
input
1 U Motor power U phase
Red 2 V
Motor power V phase
White
3 W Motor power W phase
Black 4 FG
Motor housing grounding
Green
Brake
(※ 1)
1
BRK+
Brake power supply 24VDC
Yellow
2
BRK-
Brake power supply GND
Blue
Encoder(incr
emental)
1 - NC - 2
+D
Serial communication data + data
White (red point)
3
-D
Serial communication data - data
White (black point)
4
VCC
Encoder power supply 5V
Orange (red point)
5
GND
Signal ground
Orange (black point)
6
SHIELD
Shielded wires
Black
Encoder(Abs
olute)
1
BAT
External battery (※ 2)
Yellow (black point)
2
+D
Serial communication data + data
White (red point)
3
-D
Serial communication data - data
White (black point)
4
VCC
Encoder power supply 5V
Orange (red point)
5
GND
Signal ground
Orange (black point)
6
SHIELD
Shielded wires
Black
※1 For motor with brake.
※2 External capacitor and battery are taking GND as the reference potential.
3.3.2 Motor connector and pins arrangement (1kW or more)
Figure 3.3.2 Motor connector and pins arrangement (1kW or more)

26
Table 3.3.3 Cable list ( for motor of 1kW or more)
Name
Cable
Motor power input
AWG14
Brake
note 1
AWG18
Encoder (Incremental)
Power supply:AWG22
Signal:AWG24
Note 1 For the motor with brake
Table 3.3.4 For the motor of 1kW or more
Name
Pin
No.
Signal
name
Contents
Remark
Motor power
input
A U Motor power U phase
B V
Motor power V phase
C W
Motor power W phase
D FG
Motor housing grounding
Brake
(※ 1)
1
BRK1
Brake power supply 24VDC
2 BRK2
Brake power supply GND
Encoder(incr
emental)
1
VCC
Encoder power supply 5V output
2 GND
Signal ground
3 -
NC 4 - NC 5
+D
Serial communication data + data
6 -D
Serial communication data - data
7 -
NC 8 - NC 9 - NC 10
SHIELD
Shielded wires
Encoder(Abs
olute)
1
VCC
Encoder power supply 5V output
2 GND
Signal ground
3 CAP
External capacitor (※2)
4 BAT
External battery (※2)
5 +D
Serial communication data + data
6 -D
Serial communication data - data
7 IC
Internal connection (※ 3)
8 IC
Internal connection (※ 3)
9 GND
Signal ground
10 - NC
※1 For motor with brake.
※2 External capacitor and battery are taking GND as the reference potential.
※3 Internal connection (IC) has been connected internally. Do not connect it with any other wires.

27
4. Parameter Description
Parameter list
This section gives a detailed description of the displayed parameters on the panel.
The column of 「No.」is the parameter number. Two numbers separated by “/” are the numerator and denominator number of
parameters. Take 034.0/036.0 as the example, 034.0 is the numerator number and 036.0 is the denominator number. [Basic
setting] in Parameter list are the initial setting values determined by the device. [Adjustment] indicates gain and other
parameters that need to be adjusted to get the expected operation. [Special setting] indicates the parameters set according to
the actual needs. The parameters with 「r」displayed on the right side of parameter number, are the ones that need to restart
the drive control power supply after saving. 「Yes」will be displayed in the parameters of 「Whether to restart 24VDC power
supply」. After saving the parameters in 「Parameter saving mode」, 「Whether to restart 24VDC power supply」will be
displayed for the parameters which are valid after restarting 24VDC power supply. For the models of 750W or less, the control
power is supplied from external 24VDC. For the models of 1kW or more, the control power is supplied from internal power and
please cut off 220V power of main circuit if restart needed.
<Notice>
Each parameter has its setting range, but it also depends on the setting value of other parameter. There are some parameters
unable to set, even though they are in the setting range. The following is the interdependent parameter number.
No.102.0 Inertia ratio
No.103.0 Damping ratio
No.104.0 Conversion ratio of inertia ratio
No.115.0 Control gain 1 (Position control mode)
No.116.0 Control gain 2 (Position control mode)
No.117.0 Gain FF compensation 1(Position control mode)
No.118.0 Gain FF compensation 2(Position control mode)
No.119.0 Integral gain(Position control mode)
No.131.0 Control gain 1(Speed control mode)
No.132.0 Gain FF compensation 1(Speed control mode)
No.133.0 Integral gain(Speed control mode)
Table 4.1.1 Parameter list
No
Parameter
Contents
Whethe
r to
restart
control
power
supply
002.0r [Basic setting]
Control mode
Control mode selection.
Note) Do not change when servo is ON.
0= Position control mode
1= Speed control mode
2= Torque control mode
[Initial value] 0 (Position control mode)
Yes
28
[Setting range] 0 to 2
003.0r [Basic setting]
Command mode
selection
Command mode selection
0= Zero command (select in position control/ speed control mode)
1= Pulse command (Used in position control)
2= Analog command (Used in speed control)
3= Internal generation command (Used in speed control)
[Initial value] 1 (Pulse train command )
[Setting range] 0 to 3
Yes
004.0r [Basic setting]
Communication address
Set the communication address of servo drive.
Set to “1” when not using RS-485 multi-station communication. If using
multi-station communication, refer to 「RS-485 communication wiring」. Setting
different values for each axis.
[Initial value] 1
[Setting range] 1 to 32
Yes
008.0
[Basic setting]
Selection of host
communication mode
Select host communication mode.
0= Disable
1= RS-485 asynchronous serial communication
When connecting RS-485 signal cable and using RS-485 asynchronous serial
communication, select to “1”. If not, select to “0”.
If the USB is irrelevant to this setting, it can communicate anytime.
[Initial value] 0 (Disable)
[Setting range] 0 or 1
No
009.0
[Basic setting]
Operation mode
selection
Select the operation mode.
0=I/O
1=Communication
When select “1”, the signal assigned to the input port of parallel I/O can be
operated by HCX-SETUP. Then, the input of parallel I/O will become invalid.
When select “0”, the input of parallel I/O will become valid. At this time, the
signal assigned to the input port of parallel I/O cannot be operated by
HCX-SETUP.
[Initial value] 0(I/O)
[Setting range] 0 or 1
No
011.0
[Basic setting]
RS485 communication
minimum response time
Set the minimum response time for RS485 communication
The response time of drive can be adjusted according to the minimum
response time.
For details, refer to [Communication time] of [Communication interface].
[Initial value] 3
[Setting range] 0 to 255
Yes
032.0r [Basic setting]
Pulse train command
input mode
Select pulse signal type of pulse command input.
0= Pulse and direction: using pulse and direction input
1= Orthogonal phase difference: using orthogonal phase pulse
(A-phase/B-phase) input
Yes

29
2= CCW/CW: using positive pulse and negative pulse
[Initial value] 0 (Pulse/direction)
[Setting range] 0 to 2
032.1r [Basic setting]
Pulse train command
Rotation direction
Select rotation direction of pulse command input
0: CCW Negative direction
1: CW Positive direction
[Initial value] 1 (CW Positive direction)
[Setting range] 0 or 1
Yes
032.2r [Basic setting]
With(out) use of
automatic command
interpolation for division/
multiplication
When setting command division/ multiplication, the command will be
processed by smoothing interpolation automatically.
0= Disable
1= Enable
[Initial setting] 1 (Enable)
[Setting range] 0 or 1
Yes
032.3
[Basic setting]
Selection of Pulse train
input logic
Select the logic for pulse train input.
0= Positive logic : Up counting from Low to High
1= Negative logic: Downing counting from High to Low
[Initial setting] 0 (Positive logic)
[Setting range] 0 or 1
Yes
033.0r [Basic setting]
Pulse command input
filter selection
The function of input filter is to reduce the fault caused by noise. Select the
pulse width of passing pulse command input.
0= No filter
1= Pulse width 25ns
2= Pulse width 50ns
3= Pulse width 100ns
4= Pulse width 150ns
5= Pulse width 200ns
6= Pulse width 300ns
7= Pulse width 400ns
8= Pulse width 600ns
9= Pulse width 800ns
10= Pulse width
1000ns
11= Pulse width 1200ns
12= Pulse width 1600ns
13= Pulse width 2000ns
14= Pulse width 2300ns
15= Pulse width 3100ns
When the input frequency is high, please set the small passing pulse width. To
improve interference immunity, please set the large passing pulse width.
Yes
When pulse command is open collector
circuit, it is recommended to set the best
filter. The following table indicates the
corresponding filter optimum value between
input pulse frequency and pulse duty ratio.
Select the best value according to input pulse
frequency and pulse duty ratio.

30
[Initial setting] 4 (Passing pulse width is 150ns or less)
[Setting range] 0 to 15
034.0
r
/
036.0
r
[Basic setting]
Division/ multiplication
(Numerator /
Denominator )
Set the parameters of position command pulse division/ multiplication.
When the number of upper command pulse and motor pulse per revolution is
different, calculate in terms of [(Numerator) / (Denominator )=(Number of
pulse per servo motor revolution) / (Number of host command pulse per
revolution)
[Setting example]
The number of pulse per motor revolution is 131072[pulse/rev]. Numerator can
be set 32768 by a quarter of 131072. Denominator can be set by a quarter of
the number of upper command per revolution. The corresponding parameter
setting of the number of upper command pulse per revolution is as follows.
Number of host
command per
revolution
Command division/
multiplication
(Numerator)
Command division/
multiplication
(Denominator)
131072
1000(Initial value)
1000(Initial value)
16384
32768
4096
10000
32768
2500
4096
32768
1024
4000
32768
1000
[Initial value] (Numerator / Denominator ) =1000/1000
[Setting range] (Numerator) 1 to 65535, (Denominator) 1 to 65535.
Setting range of Division/ multiplication ratio is from 0.001 to 1000.Normal
operation is not guaranteed while division/ multiplication ratio is beyond setting
range.
Yes
048.0
/
049.0
[Adjustment]
Analog command input
Filter parameter
(Numerator /
Denominator )
Low-pass filter parameter for smoothing analog speed command input.
It is valid when input filter selection (No.062.1) is set “1”,.
Parameter decrease→Smoothing effect becomes stronger, command
traceability reduces.
Parameter increase→command traceability increases,, susceptible to
interference
(Numerator / Denominator ) the value must be less than 1.
(Numerator / Denominator ) =1, filter invalid
[Initial setting] (Numerator / Denominator )= 16000/65535
[Setting range] 0~65535/1~65535
No
050.0
/
051.0
[Adjustment]
Analog command input
Gain
(Numerator /
Denominator )
Gain of analog speed command input.
When (Numerator) / (Denominator )=1 and ±10V analog command voltage is
input, the highest rotation speed of motor can be reached.
※As for the highest rotation speed of motor, refer to 「Basic specification」
According to different choice of symbol and polarity for analog command
voltage, the rotation direction of motor is different.
Decreasing this value has the effect of decreasing proportional gain of position
No

31
loop at upper controller.
[Initial setting] (Numerator / Denominator )=1000/1000
[Setting range] 0~65535/1~65535
052.0
/
053.0
[Basic setting]
Analog speed command
CCW speed limit
threshold value
(Numerator /
Denominator )
Analog speed command CCW speed limit threshold value.
Analog command CCW speed limit = (the highest speed of motor) * (threshold
value(numerator))/ (threshold value(denominator))
[initial setting] (Numerator / Denominator )=5000/5000
[Setting range] 0~65535/1~65535
No
054.0
/
055.0
[Adjustment]
Analog speed command
CW speed limit
threshold value
(Numerator /
Denominator )
Analog speed command CW speed limit threshold value.
Analog command CW speed limits = (the highest speed of motor) * (threshold
value(numerator))/ (threshold value(denominator))
[initial setting] (Numerator / Denominator )=5000/5000
[Setting range] 0~65535/1~65535
No
060.0
[Basic setting]
Analog speed command
fixed offset value
When using manual adjustment to adjust offset value of analog speed
command, set the adjustment value. It’s valid when the offset adjustment is
selected to “1= manual adjustment”. Adjust the corresponding analog speed
command input to 0r/min at the 0V input voltage.
<setting method>.
1. Servo ON (motor will rotate if offset exists)
2. When rotating at the speed of ±10r/min or less, set the value to ±50 to
confirm the operation.
(CCW direction, set to「-50」; CW direction, set to「+50」.
3. Set the offset value while observing the motor operation. (If rotate at CCW
direction, setting values change in response to 「-direction」. If rotate at CW
direction, setting values change in response to 「+direction」.
[Initial value] 0
[Setting range] -32768/32768
No
062.0
[Basic setting]
Analog speed command
rotation direction
Select rotation direction of analog speed command.
0=Inputting negative voltage, the motor has CCW rotation; Inputting positive
voltage, the motor has CW rotation.
1= Inputting positive voltage, the motor has CCW rotation; Inputting negative
voltage, the motor has CW rotation.
[Initial value] 1 (Inputting positive voltage, the motor has CCW rotation)
[Setting range] 0 or 1
No
062.1
[Basic setting]
Select analog speed
command input filter
Select analog speed command input filter.
Input filter constant can be set in No.048.0, No.049.0.
0= Disable
1=Enable (one IIR filter)
[Initial value] 1 (Enable)
[Setting range] 0 or 1
No

32
062.2
[Basic setting]
Select offset adjustment
type of analog speed
command
Select offset adjustment of analog speed command.
0=Auto tuning
1=Manual tuning
Auto tuning works under the voltage which corresponds to 0r/min of speed
command while servo ON.
Manual tuning means input offset manually to make sure input voltage
0Vcorresponds to speed command 0r/min. . Offset value can be adjusted by
parameter No.60.0(fixed offset value).
[Initial value] 1 (manual tuning)
[Setting range] 0 or 1
No
064.0
[Basic setting]
Judgment of positioning
completion
Select the output form of positioning completion signal.
0=Position difference + speed
1=Position difference+ speed+ pulse command input(speed)
When selecting 0, after the position difference is in the positioning
completion range No.68.0 and speed is in the range of positioning completion
speed No.69.0,, positioning completion signal will be output.
When selecting 1, after the position difference, speed and pulse command
input(speed) are all in the range of positioning completion range No.68.0 ,
positioning completion speed No.69.0 and positioning pulse train command
input(speed) No.70.0 respectively, positioning completion signal will be output.
The delay time from positioning completion to output positioning completion
signal can be set in No.71.0.
[Initial setting] 0
[Setting range] 0 or 1
No
065.0
[Special setting]
With or without use of
position difference error
detection
Select whether to use position difference error detection. Usually set value to
“1”.(Enable)
Only when suing torque command limit, set to “0”. Set the position deviation
value of error detection by No.87.0 and set the delay time from position error
occurred to output stop by No.89.0.
0=Disable
1=Enable
[Initial value] 1 (Enable)
[Setting range] 0 or 1
No
065.1
[Special setting]
With(out) use of speed
deviation error detection
Select whether to use speed deviation error detection. Usually set value is
“1”.( Enable)
Only when suing torque command limit, set “0”. Set the speed deviation value
of error detection by No.90.0 and set delay time from speed error occurred to
output stop by No.91.0.
0= Disable
1=Enable
[Initial value] 1 (Enable)
[Setting range] 0 or 1
No

33
066.0
r and
066.1
r
[Adjustment]
With(out) use of position
command smoothing
filter 1 and position
command filter 2
Select position command smoothing filter1 (No.66.0) and position command
smoothing filter 2 (No.66.1)
0=Disable
1=Enable
Command will be smooth as shown below after using a smoothing filter.
[Adjustment method]
Used when command acceleration or deceleration are too fast.
Used to suppress device resonance when positioning. Measuring the resonant
frequency in torque command curve and setting a corresponding average
movement number in position command smoothing filter1 moving average
time No,80 or position command smoothing filter2 average movement
number No.81, may inhibit resonance. The relation between resonant
frequency and average movement number is stated under parameter
specification of No.80 and No,81.
[Notes] This parameter can be set after more than 1.5s when the command
pulse input is 0. And the servo must be off while setting. If there is pulse input
or residual pulse setting, position difference will occur.
[Initial setting] Command smoothing filter 1 is ‘0”. (Not used)
Command smoothing filter 2 is ‘1”.(Used)
[Setting range] 0 or 1
Yes
066.3
[Special setting]
With(out) the Feed
forward delay
compensation in position
control mode
Enable/Disable Feed forward delay compensation in position control mode.
0=Disable
1= Enable
<Note> Generally set to “1”. Do not make the changes and cannot be done on
setting panel.
[Initial setting] 1 (Enable)
[Setting range] 0 or 1
Yes
067.0r [Adjustment]
Selection of drive
restriction options
Select the drive restriction options
Note) Do not modify the parameter while the servo is ON.
0=Invalid
1=CW restriction.
2=CCW restriction.
3= CW/CCW restriction.
Yes

34
[Initial setting] 0 (Invalid)
[Setting range] 0 to 3
067.1
[Basic setting]
Selection of deceleration
method at drive
restriction input
Select deceleration method at drive restriction input.
Note) Do not modify the parameter while the servo is ON.
When using deceleration method No.67.1 and stopping method No.67.2,
please follow the following combination methods.
0=Free-run
1=Short brake
2= Prompt stop
Combination
Deceleration method
No.67.1
Stopping method
No.67.2
1
0: Free-run
0: Free-run
2
1: Short brake
0; Free-run
3
2: Prompt stop
1: zero clamp
4
2: Prompt stop
0: Free-run
[Initial setting] 1
[Setting range] 0 to 2
No
067.2
[Basic setting]
Selection of stop status
at drive restriction
Select stop status at drive restriction.
Note) Do not modify the parameter while the servo is ON.
When using deceleration method No.67.1 and stopping method No.67.2,
please follow the above combination methods.
0= Free-run
1= zero clamp
[Initial setting] 1
[Setting range] 0 or 1
No
067.3
[Basic setting]
Selection of position
difference counter status
at drive restriction
Select position difference counter status at drive restriction
Note) Do not modify the parameter while the servo is ON.
0= Keep
1=Clear
[Initial setting] 1
[Setting range] 0 or 1
No
068.0
[Basic setting]
Positioning completion
range
As the reference of outputting positioning completion signal to upper controller,
this parameter is the pulse width for judging positioning completion.
The setting value should be less than the number of positioning judge pulse of
upper controller.
[Initial value] 40[Pulse](±40[pulse])
[Setting range] 0 to 32767
No

35
069.0
[Basic setting]
Positioning completion
speed
As the reference of outputting positioning completion signal to upper controller,
this parameter is the speed limit for judging positioning completion.
The setting value should be less than the number of speed limit of upper
controller.
[Initial value]
750W or less:2 [pulse/160μs] (±2 [pulse/160μs] ・・・5.72[r/min]
1kW or more : 2 [pulse/200μs] (±2 [pulse/200μs]) ・・・
4.58[r/min]
[Setting range] 0 to 32767
No
070.0
[Basic setting]
Positioning completion
pulse command input
(speed)
As the reference of outputting positioning completion signal to upper controller,
this parameter is the pulse command input(speed) for judging positioning
completion
[Initial setting]
750W or less: 0 [pulse/160μs] (±0 [pulse/160μs])
1kW or more:0 [pulse/200μs] (±0 [pulse/200μs])
[Setting range] 0 to 32767
No
071.0
[Basic setting]
Delay time of positioning
completion detection
Select the delay time from positioning completion to output signal to upper
controller.
[Initial value]
750W or less:20 [160μs]・・・3.2ms
No

36
1kW or more:16 [200μs]・・・3.2ms
[Setting range] 0 to 65000
077.0
[Adjustment]
With(out) the use of
speed command
smoothing filter
Choose whether to use speed command smoothing filter. The average
movement time can be set in No.78.0.
0=Disable
1=Enable
[Initial value] 0
[Setting range] 0 or 1
No
078.0
[Adjustment]
Average movement time
of speed command
smoothing filter
Set the average movement time of speed command smoothing filter.
It can be used when No.77.0 is effective.
[Initial value] 100 [ms]
[Setting range] 1 to 1000
No
080.0
r and
081.0
r
[Adjustment]
Average movement
number of position
command smoothing
filter 1 and average
movement number of
position command
smoothing filter 2
Set the position command smoothing filter 1 to “1(Used)” in No.66.0 to make
No.80.0 valid.
Set the position command smoothing filter 2 to “1(Used)” in No.66.1 to make
No.81.0 valid.
When the setting value of average movement number increases, the
acceleration/ deceleration will be smooth, but the response will be slow.
Setting filter 1, the average movement number can be set between 1 and
6250; setting filter 2, the average movement number can be set between 1
and 1250.
The average movement time can be represented by the following formula.
200~ 750W : (average movement time)=(average movement number)
×0.16ms
1k~2kW: (average movement time)=(average movement number) ×0.2ms
[Adjustment method]
●Smoothing will make positioning time longer in response to above average
movement time. Please have settings within the permissible range..
●When resonant occurs at constant move after acceleration or positioning
after deceleration, measuring the resonant frequency in torque command
curve and setting a corresponding average movement number in position
command smoothing filter1 moving average time No,80 or position command
smoothing filter2 average movement number No.81, may inhibit resonance.
Yes

37
The calculation of average movement number and its corresponding
suppressed resonance frequency is shown below.
750W or less: Setting value of smoothing filter=6250/(suppressed vibration
frequency[Hz])
1kW or more: Setting value of smoothing filter=5000/(suppressed vibration
frequency[Hz])
Average movement number No.080.0,
No.081.0
64
256
1024
4096
750W or less: suppressed vibration
frequency(Hz)
100
23 6 1.5
1kW or more: suppressed vibration
frequency(Hz)
80
20 5 1.2
●The vibration caused by gain FF compensation 2 can be suppressed by
position command smoothing filter 2.
When using gain FF compensation 2 No.117.0, vibration can be reduced by
using the average movement number of position command smoothing filter 1
and filter 2.
[Notes] This parameter can be set when the command pulse input is “0” for
more than 1.5s and there is no command pulse input. If possible, it is
recommended to turn off the servo. If you set the parameter when there is
pulse input or residual pulse, position shift will occur.
[Initial value] Filter 1: 25 for 200~750W, 20 for 1k~2kW
Filter 2: 10 for 200~750W, 10 for 1k~2kW
[Setting range] 1 to 6250 for filter 1, 1 to 1250 for filter 2.
087.0
[Special setting]
Position deviation error
detection value
When set No.65.0 to “1(enable)”, it is valid to detect the position deviation
errors. Normally it’s effective.
When the position deviation exceeds the setting value, the output position
deviation errors occur.
It is more difficult to detect the position deviation if the value is greater.
[Initial value] 196608[pulse] (※Equivalent to the number of 1.5 turns pulse)
[Setting range] 0 to 2147483647.
No
089.0
[Special setting]
Delay time of position
deviation error detection
When set No.65.0 to “1(enable)”, it is valid to detect the position deviation
errors.
The time is from exceeding setting value 「Position deviation error detection
value」 to outputting position deviation error signal.
It takes longer from error occurred to error output when the value is greater.
[Initial value]
200~750W: 250 [160μs]・・・40ms
1k~2kW: 200 [200μs]・・・40ms
[Setting range] 0~32767
No
090.0
[Basic setting]
Speed deviation error
When set No.65.1 to “1(enable)”, it is valid to detect the speed deviation
errors.
No

38
detection value
Normally it’s effective. When the speed deviation exceeds setting detection
value, speed deviation error occurs.
It is more difficult to detect speed deviation error if the value is greater.
[Initial value] 200~750W:524[pulse/160μs] ・・・1499[r/min]
1k~2kW: 655[pulse/200μs] ・・・11499[r/min]
[Setting range] 0 to 32767
091.0
[Special setting]
Delay time of speed
deviation error detection
When set No.65.1 to “1(enable)”, it is valid to detect the speed deviation error.
Normally it is effective.
The time is from exceeding setting value 「Speed deviation error detection
value」 to output speed deviation error signal.
It takes longer from error occurred to error output stopped when the value is
greater.
[Initial value] 200~750W: 250 [160μs] ・・・40ms
1k~2kW: 200 [200μs]・・・40ms
[Setting range] 0 to 32767
No
102.0
[Adjustment]
Inertia ratio
Set Inertia ratio by the device load .
[Initial value] 250 [%]
[Setting range] 100 to 3000
No
103.0
[Adjustment]
Damping ratio
Set Damping ratio on the device side. When the friction and inertia ratio is very
big, the change of damping ratio value may shorten the setting time.
[Initial setting] 100 [%]
[Setting range] 10 to 5000
No
110.0
[Adjustment]
With or without the use
of estimated inertia ratio
Setting of auto tuning mode.
If the movement direction of machine connected to the motor is horizontal,
select “standard mode”. If vertical, select “Unbalanced mode”.
1=Standard mode
1=Unbalanced mode
[Initial value] 1 (Standard mode)
[Setting range] 1 to 2
No
110.1
[Adjustment]
With(out) the use of
real-time auto tuning
Select whether to use real-time auto tuning.
0 = Disable
1 = Enable and Apply Inertia ratio
2 = Enable and Apply Inertia ratio and Dumping ratio
[Initial value] 0 (Disable)
[Setting range] 0 to 2
No
113.0
[Adjustment]
Control gain level
(position control)
Set the control gain level in position control mode. If traceability to command is
slow or rigidity of drive system is low, set a lower value; If traceability to
command is rapid or rigidity of drive system is high, set a higher value.
When setting this parameter, No. 115.0~119.0 will be set automatically and
No.114.0 becomes invalid.
[Initial value] 15
[Setting range] 5 to 45
No

39
113.1
[Adjustment]
Inertia condition
Set the inertia condition of position control mode.
0= Can interchange with F/W version of 2.0.4.0 or prior
1= For the device of heavy load and low rigidity, or large load changes
2= Standard setting
3= For the device of light load and CW/CCW frequently
[Initial value] 2 (Standard)
[Setting range] 0 to 3
No
114.0
[Adjustment]
Control level (position
control)
Set control level of position control mode. If traceability to command is slow or
rigidity of drive system is low, set the lower value; If traceability to command is
rapid or rigidity of drive system is high, set the higher value.
When setting this parameter, No. 115.0, No.116.0 will be set automatically and
No.113.0 becomes invalid.
When the inertia condition No.113.1 is set to “0”(servo drive version 2.0.4.0 or
prior), the setting range is from 1 to 46.
[Initial value] 15
[Setting range] 5 to 45
No
115.0
[Adjustment]
Control gain 1 (position
control)
Set the Control gain 1 at position control mode. Higher setting value can
shorten the setting time. Set the Control gain 2 as the following values.
[Initial value] 50 [rad/s]
[Setting range] 5 to 1000
No
116.0
[Adjustment]
Control gain 2 (position
control)
Set the Control gain 2 at position control mode. Higher setting value can
improve the traceability to the command. Too high setting value can cause
overshoot and vibration.
When No.113.0 control gain level or No.114.0 control level is adjusted to set
automatically, sometimes the setting values will exceed the setting range.
[Initial value] 200[rad/s]
[Setting range] 80 to 5000
No
117.0
[Adjustment]
Gain FF compensation 1
(position control)
Set feed forward compensation ratio (speed) of the Control gain 1 in position
control mode. After confirming inertia ratio, adjusting this parameter will
shorten the setting time. Too high setting value will lead to overshoot. And too
low setting value will make setting time longer.
[Initial value] 10000[0.01%]
[Setting range] 0 to 15000
No
118.0
[Adjustment]
Gain FF compensation 2
(position control)
Set feed forward compensation ratio (torque) of the control gain 2 in position
control mode. It is suitable to adjust this parameter when it requires small
following error and precise trajectory. After Gain FF compensation 1
shortens setting time, please increase this parameter value. If vibration
occurs, adjusting No.81.0 position command smoothing filter 2 average
movement times may suppress the vibration.
[Initial setting] 0 [0.01%]
[Setting range] 0 to 15000
No
119.0
[Adjustment]
Setting integral gain in position control mode can suppress external
No

40
Integral gain (position
control)
interference. When the setting value is higher, the position deviation
convergence of positioning setting will become fast. But if setting value is too
high, vibration will occur.
When No.113.0 control gain level or No.114.0 control level is adjusted to set
automatically, sometimes the setting values will exceed the setting range.
[Initial value] 160[rad/s]
[Setting range] 45 to 5000
129.0
[Adjustment]
Control gain level (speed
control)
Select control gain level in speed control mode. If traceability to command is
slow or rigidity of drive system is low, set the lower value; If traceability to
command is rapid or rigidity of drive system is high, set the higher value.
When setting this parameter, No. 131.0~133.0 will be set automatically and
No.130.0 becomes invalid.
[Initial value] 15
[Setting range] 1 to 46
No
130.0
[Adjustment]
Control level (speed
control)
Select control level in speed control mode. If traceability to command is slow
or rigidity of drive system is low, set the lower value; If traceability to command
is rapid or rigidity of drive system is high, set the higher value.
When setting this parameter, No. 131.0 will be set automatically and No.129.0
becomes invalid.
[Initial value] 15
[Setting range] 1 to 46
No
131.0
[Adjustment]
Control gain 1 (speed
control)
Set the control gain in speed control mode.
It corresponds to proportional gain of speed control loop.
[Initial value] 399[rad/s]
[Setting range] 100 to 6000
No
132.0
[Adjustment]
Gain FF compensation 1
(speed control)
Set feed forward compensation in speed control mode. The higher the setting
value, the better the traceability to command. But Too high setting value may
lead to overshoot or vibration
[Initial value] 0 [0.01%]
[Setting range] 0 to 15000
No
133.0
[Adjustment]
Integral gain(speed
control)
Select integral gain in speed control mode.
The higher the setting value, the smaller the speed change caused by external
disturbance.
[Initial value] 300[rad/s]
[Setting range] 45 to 5000
No
144.0
[Basic setting]
With or without the use
of torque command limit
override
Select torque command limit value in No.147.0, No.148.0
Confirm the following items when using torque limit.
①「No.65.0 Selection of Position deviation error detection」, please set it to
“0=Disable”
②「No.65.1 Selection of Speed deviation error detection」, please set it to “0=
No

41
Disable”
When the command deviation value is small, even though the torque limit is
set to be valid, it will be OK to set ① or ② to “1(enable)”.
0= Disable
1= Enable
[Initial setting] 0 (Disable)
[Setting range] 0 or 1
144.1
[Basic setting]
Torque limit state
output mode
Select the output condition for torque limit.
0= All conditions
(Torque is limited by torque command limit value 1 (No.147.0), max. torque
limit value of motor and torque limit value of home position return (No. 656.0),
not limited by speed in torque control mode)
1= Torque command limit Override 1 (No.147.0) or 2 (No.148.0)
2= Torque command limit Override 2 (No.148.0)
[Initial setting] 0 (All conditions)
[Setting range] 0 to 2
No
147.0
148.0
[Basic setting]
Torque command limit
override 1, 2
It is valid when No.144.0 torque command limit override is set to “1(enable)”.
Set torque command limit override relative to rated torque ratio.
Tow torque limits could be set.
[Initial value] 3000[0.1%] for torque limit 1; 2000[0.1%] for torque limit 2
[Setting range] 0 to 65535
No
151.0
[Basic setting]
Torque command limit
override at prompt stop
Set the torque command limit override relative to rated torque, if the stop type
in No.224.0 is set to “2=prompt stop” when servo is OFF.
[Initial value] 5000[0.1%] (When set 3000 or more, the limit value of max.
torque command is 300%. If the setting value is bigger than 1000 , overload
error will occur according to overload characteristics specified time.
[Setting range] 0 to 65535
No
152.0
[Basic setting]
Analog torque command
speed limit value
Set Speed limit value of analog torque control mode.
[Initial value] Max. speed of the motor
[Setting range] 0 to 10000
No
160.0
[Adjustment]
Selection of torque
command low-pass filter
Select torque command low-pass filter.
0=No filter
1= Preliminary IIR filter
[Initial value] 1 (Preliminary IIR filter)
[Setting range] 0 or 1
No
160.1
[Adjustment]
Torque command
Selection of whether to
use notch filter
Whether the notch filter is used to set the torque command.
0=Disable
1=Enable
[Initial value] 0 (Disable)
[Setting range] 0 or 1
No
160.2
[Adjustment]
Select whether to use the auto setting for torque command low-pass filter in
No

42
Auto setting ON/OFF for
Torque command
Low-pass filter
control gain level (No. 113 and No. 129).
0 = Auto setting OFF
1 = Auto setting ON
[Initial value] 1 (Auto setting ON)
[Setting range] 0 or 1
162.0
[Adjustment]
Torque command
preliminary filter time
constant for Low-pass
filter
Set the torque command preliminary filter time constant for Low-pass filter
[Initial value] 20 [0.01ms]
[Setting range] 0 to 65535
No
168.0
[Adjustment]
Torque command notch
filter frequency
Set Notch filter notch frequency of Torque command
[Initial value] 5000[Hz]
[Setting range] 0 to 5000
No
169.0
[Adjustment]
Torque command Notch
filter width
Set notch filter width of torque command.
Set the ratio relative to a frequency band with 0 notch depth and -3[dB]
attenuation rate. The larger the value, the greater the width of the notch
[Initial value] 8
[Setting range] 0 to 16
No
170.0
[Adjustment]
Torque command Notch
filter depth
Set the notch depth at the notch frequency of torque command notch filter,
Set the I/O ratio of notch frequency. When the setting value is 0, the notch
frequency input is completely cut off. When the setting value is 256, the notch
frequency input is completely through. The notch depth becomes shallow
when the value is bigger.
[Initial value] 0
[Setting range] 0 to 256
No
224.0
[Basic setting]
Type selection
deceleration stop at
servo OFF
Select the deceleration stop type when the alarm occurs or servo ON signal is
off in motor revolution.
0=No brake
1=Short brake mode
2= Prompt stop
[Initial value] 1 (Short brake mode)
[Setting range] 0 to 2
No
224.1
[Basic setting]
Deceleration stop at
Servo off: cancelation
reasons
Select cancellation reasons for deceleration stop at servo OFF
0 = Operating time
1 = Rotations of cancelation or operating time
[Initial value] 1 (Rotations of cancelation or operating time)
[Setting range] 0 or 1
No
224.2
[Basic setting]
Use of a deceleration
stop in case of control
power supply voltage
drop
Enable/Disable Deceleration Stop when the voltage from a control power
supply drops by No. 228.0.
0 = Disable
1 = Enable
[Initial value] 1 (Enable)
No

43
[Setting range] 0 or 1
226.0
[Basic setting]
Deceleration stop :
operating time at servo
off
Set the operating time for deceleration stop at servo OFF.
(If “0(No brake)” is set to No.224, this parameter is invalid.)
[Initial value] 200W~750W: 313 [160μs] ・・・50ms,
1kW~2kW: 250 [200μs] ・・・50ms
[Setting range] 0 to 16383
No
227.0
[Basic setting]
Cancellation speed of
deceleration stop and
brake cancellation OFF
at servo OFF.
Set the cancellation speed of deceleration stop at servo OFF. It sets the speed
of brake OFF cancellation.
(If “0(No brake)” is set to No.224.0 and “0(Operation time)” set to No.224.1,
this parameter is invalid.)
[Initial value] 200W~750W: 17[pulse/160μs] ・・・50r/min,
1kW~2kW: 22[pulse/200μs] ・・・50r/min
[Setting range] 0 to 32767
No
228.0
[Basic setting]
Operating time of
deceleration stop at
control power supply
voltage drop
Set the operating time of deceleration stop at control power supply voltage
drop in motor rotation.
[Initial value] 62 [160μs] ・・・10ms
[Setting range] 0 to 16383 [ms]
No
237.0
[Basic setting]
Delay time at servo OFF
Set the delay time between getting the input signal of Servo OFF and motor
excitation OFF.
(The disconnection of COM2 and SVON terminal indicates the servo ON
input signal is OFF.)
[Initial value] 200W~750W: 0[160μs] ・・・0ms,
1kW~2kW: 0[200μs] ・・・0ms
[Setting range] 0 to 3125
No
238.0
[Basic setting]
Delay time of brake
release
Set the delay time from motor excitation start to brake release output signal
(MBRK)ON. (The connection of COM2 and SVON terminal indicates the
brake release output signal is ON.)
[Initial value] 200W~750W: 25[pulse/160μs],
1kW~2kW: 20[pulse/200μs]
[Setting range] 0 to 3125
No
257.0
[Basic setting]
Selection of an encoder
system
Select an option for Absolute system or Incremental system.
0 = Incremental system
1 = Absolute system (multi-rotation counter overflow detection disabled)
2 = Absolute system (multi-rotation counter overflow detection enabled)
[Initial value] 0 (Incremental system)
[Setting range] 0 to 2
Yes
272.1r [Basic setting]
Encoder output rotation
direction
Set the rotation direction of encoder output.
0 = Down counting in the case of CCW rotation
1 = Up counting in the case of CCW rotation
[Initial value] 1 (Up counting in the case of CCW rotation)
[Setting range] 0 or 1
Yes

44
276.0
r /
278.0
r
[Basic setting]
Division and
multiplication of encoder
pulse
output(Numerator /
Denominator )
Set the division and multiplication of encoder pulse output.
When the 1-roration pulse number of encoder and the motor is different, set it
to ‘Numerator / Denominator =1-roration pulse number of encoder/ 1-roration
pulse number of motor.
If the output Z-phase pulse width is narrow and the upper control device
cannot identify it correctly, we can reduce the division and multiplication ratio
or speed to increase the pulse width by encoder pulse output division and
multiplication No. 276. 0 and 278. 0.
[Pulse width]= 1/ rotation speed (division/ multiplication ratio × 217)
[Initial value] (Numerator )/ (Denominator )=1000/8000
[Setting range] (Numerator ) 1~65535;(Denominator )1~65535
Frequency division/multiplication could be set to 1/32768 to 1.
But it’s necessary that [encoder resolution] × [Frequency
division/multiplication] = [multiples of 4] and output frequency must less than
4Mpps(Maximum value).
Yes
288.0
/
289.0
[Adjustment]
Analog torque command
input filter (Denominator
/Numerator)
This parameter is for the low-pass filter that smooths analog torque command
input. It's valid when No.302.1 =1(enable).
When the value is small, the smoothing becomes stronger, but the traceability
to command drops.
When the value is bigger, the traceability to command improves, but it is easy
to be disturbed.
Numerator / Denominator cannot exceed “1”.
If Numerator / Denominator=1, no filtering.
[Initial value] Numerator / Denominator= 16000/65535
[Setting range] 0 to 65535/1 to 65535
No
290.
0 /
291.
0
[Adjustment]
Analog torque command
input gain (Denominator
/Numerator)
Set Analog torque command input gain.
Input of Analog command voltage =-10V or +10V with
(Numerator)/(Denominator)=1 attains motor peaks torque.
Motor rotation direction differs according to the selection of analog command
voltage symbols and characteristics.
※For the details of peaks torque, refer to [Basic specification].
[Initial value] (Numerator) / (Denominator) = 3100/3100 (Varies with different
motor models)
[Setting range] 0 to 65535/1 to 65535
No
292.
0/
293.
0
[Basic setting]
Analog torque command
CCW torque limit
Override (Denominator/
Numerator)
Set Analog torque command CCW torque limit Override
Analog command CCW torque limit =motor peak torque × (Override
(Numerator)/Override(Denominator))
[Initial value] (Numerator) / (Denominator) = 3100/3100 (Varies with motor
models)
[Setting range] 0 to 65535/1 to 65535
No
294.
0/
[Basic setting]
Analog torque command
Set Analog torque command CW torque limit Override
Analog command CW torque limit =motor peak torque × (Override
No

45
295. 0 CW torque limit Override
(Numerator)/Override(Denominator))
[Initial value] (Numerator) / (Denominator) = 3100/3100 (Varies with motor
models)
[Setting range] 0 to 65535/1 to 65535
300. 0 [Basic setting]
Analog torque command
Fixed offset value
Set Analog torque command Fixed offset value.
This parameter is valid when No.302.2 =1. If the input voltage is 0V, the state
of analog torque command input is 0%.
<Setting method>
1. Servo ON (The motor rotates automatically if offset deviation occurs)
2. Observe the torque command value, and set offset value.
[Initial value] 0
[Setting range] -32768 to 32767
No
302. 0 [Basic setting]
Analog torque command
Rotation direction
Set Rotation direction of Analog torque command input.
0 = CCW rotation by negative input voltage,CW rotation by Positive input
voltage
1 = CCW rotation by positive input voltage,CW rotation by negative input
voltage
[Initial value] 1 (CCW rotation by positive input voltage)
[Setting range] 0 or 1
No
302. 1 [Basic setting]
Analog torque command
Input filter option
Enable/Disable Input filter for Analog torque command. It can be done by No.
288. 0 and No. 289. 0.
0 = Disable
1 = Enable
[Initial value] 1
[Setting range] 0 or 1
No
302. 2 [Basic setting]
Analog torque command
Offset adjustment
method
Select Offset adjustment method of Analog torque command.
Auto tuning is that the input voltage can make the torque command 0% at
servo ON. Manual tuning is to input offset value by manual to make torque
command 0% at input voltage 0V. Offset value can be adjusted by No.300.0
(Analog torque command Fixed offset value)
0 = Auto tuning
1 = Manual tuning
[Initial value] 1 (Manual tuning)
[Setting range] 0 or 1
No
385. 0 [Basic setting]
JOG operation:
Acceleration time
Set Acceleration time for the JOG operation
This parameter set a duration for the speed command to accelerate from 0
rpm to 1000rpm.
[Initial value] 1000[ms]
[Setting range] 0 to 60000[ms]
No
386. 0 [Basic setting]
JOG operation:
Deceleration time
Set Deceleration time for the JOG operation
This parameter set a duration for the speed command to accelerate from 1000
rpm to 0rpm.
No

46
[Initial value] 1000[ms]
[Setting range] 0 to 60000[ms]
387. 0 [Basic setting]
JOG operation: Target
speed
Set a target speed of the JOG operation.
[Initial value] 300[ r/mi n]
[Setting range] For 50W~100W:0~6300[ r/mi n]
For 200W~400W:0~5000[ r/mi n]
For 750W: 4500[ r/mi n]
For 1kW~2kW:0~3000[ r/mi n]
Note) Alarm occurs when it exceeds max. speed. Do not exceed the
max.speed.
No
388.0
[Basic setting]
Selection of Internal
speed command type
It is valid when control mode No.2.0 is set to “1=speed control mode” and
command mode selection No.3.0 is set to “3=Internal generation command” .
Select command type of internal speed command. No.390.0 and No.391.0 are
used to set acceleration/deceleration time of internal speed command.
No.392.0~399.0 are used to set the target speed.
0 = zero command input
1 = internal speed command(trapezoid speed command with 8 phases)
[Initial value] 0
[Setting range] 0 or 1
No
390.0
[Basic setting]
Internal speed command
Acceleration time
It is valid when control mode No.2.0 is set to “1=speed control mode” ,
command mode selection No.3.0 is set to “3=Internally generated
command” , and internal speed command type No.388.0 is set to “1=
trapezoidal speed command” . Set the acceleration time of internal speed
command input. Set the time of speed command from 0rpm to 1000rpm.
No.391.0 is used to set internal speed command deceleration time.
No.392.0~399.0 are used to set the target speed.
[Initial value] 1000 [ms]
[Setting range] 0 to 60000
No
391.0
[Basic setting]
Internal speed command
Deceleration time
It is valid when control mode No.2.0 is set to “1=speed control mode” ,
command mode selection No.3.0 is set to “3=Internal generation command” ,
and internal speed command type No.388.0 is set to “1= trapezoidal speed
command” . Set the deceleration time of internal speed command input. Set
the time of speed command from 1000rpm to 0rpm. No.390.0 is used to set
internal speed command acceleration time. No.392.0~399.0 are used to set
the target speed.
[Initial value] 1000 [ms]
[Setting range] 0 to 60000
No
392.0
393.0
394.0
395.0
396.0
397.0
[Basic setting]
Internal speed command
Target speed 1
Target speed 2
Target speed 3
Target speed 4
It is valid when control mode No.2.0 is set to “1=speed control mode” ,
command mode selection No.3.0 is set to “3=Internal generation command” ,
and internal speed command type No.388.0 is set to “1= trapezoidal speed
command” . Internal speed command acceleration/deceleration time is set in
No.390.0 and No.391.0. Set 8-phase target speed of internal speed command
input. The switch of target speed can be realized by following combination of
No

47
398.0
399.0
Target speed 5
Target speed 6
Target speed 7
Target speed 8
8pin, 9pin and 10pin in CN1.
Target
speed
I5(8pin in CN1)
I6(9pin in CN1)
I7 (10pin in CN1)
1
Open
Open
Open 2 Short circuited
Open
Open 3 Open
Short circuited
Open 4 Short circuited
Short circuited
Open 5 Open
Open
Short circuited
6
Short circuited
Open
Short circuited
7
Open
Short circuited
Short circuited
8
Short circuited
Short circuited
Short circuited
[Initial value]
Target speed 1: 500 [r/min]
Target speed 2: 1000 [r/min]
Target speed 3: 1500 [r/min]
Target speed 4: 2000 [r/min]
Target speed 5: 2500 [r/min]
Target speed 6: 3000 [r/min]
Target speed 7: 4000(200W~750W motor)[r/min]
3000(1KW~2KW motor)[r/min]
Target speed 8: 5000(200W~400W motor)[r/min]
4500(750W motor)[r/min]
3000(1KW~2KW motor)[r/min]
[Setting range] 0 to the highest speed of motor
642. 0 [Basic setting]
Internal speed command
- Operation mode
Set Operation mode for position control mode and internal generation
command.
0 = Point Table
1 = Communication operation
2 = Manual pulse input
[Initial value] 1 (Communication operation)
[Setting range] 0 to 2
No
643. 0 [Special setting]
Internal speed command
- Overflow detection
option
Enable/Disable Internal position command Overflow detection function.
0 = Disable
1 = Enable
To prevent the absolute position from disappearing when the target position
exceeds the absolute position range in Point table or communication
operation.
When “1 = Enable” is set and the target position (ABS position command) in
operation command exceeds absolute position, the alarm of internal position
command overflow will occur. When “0 = Disable” is set and the target position
exceeds absolute position, it can implement relative operation, not the
absolute operation. The relative operation is that the point table operation
Yes

48
command method is set to the operation of relative value and test-run. The
absolute operation is that the point table operation command method is set to
the operation of absolute value.
[Initial value] 1
[Setting range] 0 to 1
644. 0 [Special setting]
Point No. output method
Set Point No. output method from user I/O output to PM1...3 in positioning
operation.
0 = Output Operation start point at Operation start
1 = Output Operation start point at Operation end
2 = Output each point No.at each operation start
[Initial value] 1 (Output Operation start point at Operation end)
[Setting range] 0 to 2
No
645. 0 [Special setting]
Base signal 1 selection
for Home position
Select Base signal 1 at determine Home position.
0 = Arbitrary position
1 = Stopper
2 = Home position DOG front end
[Initial value] 2 (Home position DOG front end)
[Setting range] 0 to 2
No
645. 1 [Special setting]
Base signal 2 selection
for Home position
Set another base signal(Base signal 2)for home position after detecting Base
signal 1.
0 = None
1 = Encoder Phase Z
[Initial value] 0 (None)
[Setting range] 0 to 1
No
645. 3 [Special setting]
Home position Base
signal 1 redetection
Set the Base signal 1 redetection in creep speed after detecting home position
DOG front end.
0 = Disable
1 = Enable
[Initial value] 0 (None)
[Setting range] 0 to 1
No
646. 0 [Special setting]
Home position return
direction
Set Home position return direction.
0 = CCW direction
1 = CW direction
[Initial value] 0 (CCW direction)
[Setting range] 0 to 1
No
646. 1 [Basic setting]
Home position sensor
input polarity
Set Home position sensor input polarity.
0 = When OFF, detect Home position DOG front end
1 = When ON, detect Home position DOG front end
[Initial value] 0 (When OFF, detect Home position DOG front end)
[Setting range] 0 to 1
No
646. 2 [Basic setting]
Home positon return
Enable/Disable Home position return Timeout.
0 = Disable
No

49
Timeout option
1 = Enable
[Initial value] 1 (Enable)
[Setting range] 0 to 1
646.3
[Basic setting]
Point No.0 function
selection
Select a function for Point No.0 when PCSTART1 is put into user I/O in
forward start.
0 = Return to home position
1 = Point table operation
[Initial value] 0 (Return to home position)
[Setting range] 0 to 1
No
647. 0 [Basic setting]
Home position return
Torque limit option
Select whether to switch the torque limit value of home position return to home
position return limit value.
0 = Disable
1 = Enable
The torque limit detected by stopper is irrelative to the setting of this parameter
in using home position return of stopper.
[Initial value] 0 (Disable)
[Setting range] 0 to 1
No
647. 1 [Basic setting]
Action at home position
return completion
Select “ 1= Move” from home position base signal 1 detection to home position
completion.
0 = No move
1 = Move
[Initial value] 0 (No move)
[Setting range] 0 to 1
No
648. 0 [Basic setting]
Home position return
Speed
Set the speed after the home position base signal 1 is detected.
[Initial value] 500[rpm]
[Setting range] 1 to Max. speed of motor
No
649. 0 [Basic setting]
Home position return
Creep speed
Set the creep speed after the home position base signal 1 is detected.
[Initial value] 10[rpm]
[Setting range] 1 to Max. speed of motor
No
650. 0 [Basic setting]
Home position return
Acceleration/Deceleratio
n time
Set Acceleration/Deceleration time for Home position return
This parameter sets Acceleration time and Deceleration time per 1000rpm.
If the load inertia ratio is 10 times or more, set up a value more than the initial
value of 30. Otherwise, vibration will occur.
[Initial value] 30[ms/1000rpm]
[Setting range] 0~to 5000
No
651. 0 [Special setting]
Home position Return
Shift-to-home-position
quantity
Set shift quantity from the position where the Base signal was detected to the
home position.
[Initial value] 0 [Command unit]
[Setting range] 0 to 1,000,000,000
No
653. 0 [Special setting]
Home position return
Home position data
Set a position at the time of home position return complete.
[Initial value] 0 [Command unit]
[Setting range] -1,000,000,000 to 1,000,000,000
No

50
655. 0 [Special setting]
Home position return
Press detection time
Set Torque limit detection at the time of press home position return.
[Initial value] 100 [ms]
[Setting range] 5 to 1,000
No
656. 0 [Special setting]
Home position return
Torque limit value
Set Torque limit value at the time of home position return. This value is
measured in terms of proportion to rated torque. This setting value is the
torque limit value of press home position return.
[Initial value] 500[0.1%]
[Setting range] 10 to 3,000
No
657. 0 [Special setting]
Home position return
Phase Z invalidation
distance
Set a distance from the positon where Base signal 1 for home position is
detected to the position where Phase Z detection starts.
[Initial value] 0 [Command unit]
[Setting range] 0 to 1,000,000,000
No
659. 0 [Special setting]
Home position return
Timeout Time
Set Home position return Timeout Time.
[Initial value] 60,000[10ms]
[Setting range] 0 to 60,000
No
5. Operation
5.1 Preface
5.1.1 Preface
This product can drive the motor by 5 operation modes of combination of control mode and command mode.
This chapter describes the operation method of different operation modes.
■ Position control mode (Pulse position command input)
1) Wiring for user I/O (CN1) connector
The following three kinds of signals can be input in position control mode.
- Differential input
- 24V open collector input
- 5V open collector input
2) The setting of basic parameter
3) Test run
■ Speed control mode(Analog speed command input)
1) Wiring for user I/O (CN1) connector
2) The setting of basic parameter
3) Test run
■ Speed control mode(Internal speed command)
1) Wiring for user I/O (CN1) connector
2) The setting of basic parameter
3) Test run
■ Torque control mode (Analog torque command input)
1) Wiring for user I/O (CN1) connector
2) The setting of basic parameter

51
3) Test run
■ Position control mode (Internal position command)
5.1.2 Precautions
Table 5.1.2 Precautions
Make sure to cut off all phases of power supply
before wiring.
To .prevent electric shock, fire, malfunction and injury
The wiring should be performed by the professional
electrical engineer.
To .prevent electric shock, fire, malfunction and injury
Make sure all the wiring should be connected
properly before power ON.
To .prevent electric shock, fire, malfunction and injury
5.1.3 Common parameters
Point
Table 5.1.2 Common parameter list
Parameter NO.
Description
2.0
Parameters of control mode and command mode
3.0
4.0
Parameters of RS-485 and absolute encoder
8.0
11.0
257.0
67.0
Parameters of drive input restriction
67.1
67.2
67.3
144.0
Parameters of torque limit
144.1
147.0
148.0
151.0
Parameters of safety stop
224.0
224.1
224.2
226.0
227.0
228.0
The common parameters in the following table should be set in all the operation
modes.
Set the following parameters according to the using status.
For details, refer to [Chapter 4 Parameter list].

52
5.1.4 Setting method for basic parameter
To drive the motor in the different operation modes, the setting and operation of the related basic parameter should be done
necessarily. Here are the steps of parameter setting and change by using ‘setting panel’ and HCX-SETUP’.
■By setting panel
1. Switch on the power supply to the drive
2. Set the basic parameter according to the following steps.
Table 5.1.3 Change of the basic parameter (By setting panel)
Display and operation
Description
Initial display at the start.
Press button four times
Switch to the mode of setting panel.
Switch to the parameter mode. You can change the parameter No. here. (Display
parameter 2.0)
Press button once
Display the setting value of parameter 2.0.
Display the setting value of parameter 2.0.
The flickering bit is changeable.
Press button
Press the UP or DOWN to input the parameters.
Confirm the parameter value. (Display in ‘Speed control mode’.)
Press button once
After setting the parameter on the RAM of the drive, the display changes from flickering to
light.
Press button once
Return to the display of parameter No.
Return to the display to change the parameter No.
(Display parameter 2.0)
Press button
Press UP button to change the parameter No.
Display parameter 3.0.
Press button once
Display the setting value of parameter 3.0.
Press button to set the related parameters. We can go to the next step after all the parameters are set.
Press three times
Switch to the mode of setting panel.
Switch to parameter saving mode.
Press button once
Save the parameter to the EEPROM in drive.
(When saving, 『P』 in 『SAVE_P』 will flicker.)
To the end.
-
Please cut off the power supply to the drive and restart. After restart the power, the setting
237.0
272.1
Parameters of encoder pulse output
276.0
278.0

53
will be effective.
Figure 5.1.1 Setting method for basic parameter (by HCX-SETUP)
Step
Display and operation
1
Switch on the control power supply to the drive.
Note 1)
2
Use USB cable to connect CN3(PC communication connector) on the drive and PC, then start
HCX-SETUP.
3
The information for the servo drive will be displayed on the [Communication setting] screen
4
Click [Connect] button to communicate with the servo drive.

54
5
Select [Parameter]. When changing the value of parameter, the asterisk “*” will show in the [Change
setting].
6
Click [Set] button to write the parameters modified into the drive RAM.(The asterisk “*” will disappear.)
Click [Write] button to store the parameter into the EEPROM of the drive.
7

55
After click [Communication setting] button, click [Disconnect] to disconnect the communication with the
servo drive.
8
Switch off the control power to the drive and restart.
The change status will not be displayed before restarting the control power supply.
Note 1: The control power for models of 750W or less is supplied from external 24VDC.For 1kW or more, is supplied from
internal. Therefore, the control power for models of 1kW or more can be ON/OFF by switching on/off the AC power supply of
main circuit.
5.2 Position control mode (Pulse position command input)
5.2.1 Wiring for user I/O connector (CN1) (Differential input)
Name
Symbol
Terminal
No.
Signal name
Contents
User I/O
●24V power
supply input
●Parallel I/O
●Pulse command
input
●ABZ output
CN1
1
24V
Drive control power supply 24V input
2
G24V
Drive control power supply GND
3
COM+
I/O power supply 24V input
4
SVON
Servo ON input
5
RESET
Alarm reset input
6
HOLD
Command input restriction
7
PCLR
Deviation counter clear input
8 - Reserved
9
CCWL
CCW drive input restriction
10
CWL
CW drive input restriction
11
TLSEL1
Torque limit input
12
COM-
I/O power supply GND
13
MBRK
Brake release output
14
SERVO
Servo status output
15
POSIN
Position completion output
16 - Reserved
17
T-LIMIT
Torque limit output
18
OCZ
Encoder Z-phase output (open collector)
19
SRDY+
Servo ready output +
20
SRDY-
Servo ready output -
21
ALM+
Servo alarm output+
22
ALM-
Servo alarm output-
23
NC1
Reserved (Disconnected)
24 - Reserved
25 - Reserved

56
26
CMD_PLS
Pulse command, pulse, orthogonal phase
difference A-phase, CCW
27
/CMD_PLS
Pulse command, /pulse, orthogonal phase
difference /A-phase, /CCW
28 - Reserved
29 - Reserved
30
CMD_DIR
Pulse command, direction, orthogonal phase
difference B-phase, CW
31
/CMD_DIR
Pulse command, /direction, orthogonal phase
difference /B-phase, /CW
32 - Reserved
33 - Reserved
34 - Reserved
35 - Reserved
36
OUT_A
Encoder A phase output
37
/OUT_A
Encoder /A phase output
38
OUT_B
Encoder B phase output
39
/OUT_B
Encoder /B phase output
40
OUT_Z
Encoder Z phase output
41
/OUT_Z
Encoder /Z phase output
42
SG
Signal ground
43
485
RS-485 communication data
44
/485
RS-485 communication /data
45
SG
Signal ground
46
NC2
Reserved(Disconnected)
47 - Reserved
48 - Reserved
49 - Reserved
50 - Reserved

57
Note 1)Control power supply(24V, G24V) and I/O power (COM+, COM-) share the same power supply(For the models of
750W or less).
Note 2)If there is drive inductive load(relay), please use protective circuits(diode).
Note 3) Transistor output is an open collector output circuit of the Darlington-connected. It should be connected with relay or
optocoupler. Please don’t connect transistor directly because the voltage VCE(SAT) between collector and emitter is about
1V which cannot meet the required voltage VIL of TTL IC when transistor is ON.
Note 4) Terminal resistance must be connected as shown in the wiring diagram.
Note 5) Connect the signal ground on the host control device of output signal of the encoder. The connection of signal ground
and power supply GND may cause malfunction.
Note 6) If the pulse width of Z-phase is too narrow to identify the host control device, please reduce the encoder pulse output
division and multiplication No.276.0, 278.0 or reduce the speed to increase the pulse width.[Pulse width]=1/speed/(division
and multiplication×217).

58
5.2.2 Pulse position command input (24V open collector input)
Name
Symbol
Terminal
No.
Signal name
Contents
User I/O
●24V power
supply input
●Parallel I/O
●Pulse command
input
●ABZ output
CN1
1
24V
Drive control power supply 24V input
2
G24V
Drive control power supply GND
3
COM+
I/O power supply 24V input
4
SVON
Servo ON input
5
RESET
Alarm reset input
6
HOLD
Command input restriction
7
PCLR
Deviation counter clear input
8 - Reserved
9
CCWL
CCW drive input restriction
10
CWL
CW drive input restriction
11
TLSEL1
Torque limit input
12
COM-
I/O power supply GND
13
MBRK
Brake release output
14
SERVO
Servo status output
15
POSIN
Position completion output
16 - Reserved
17
T-LIMIT
Torque limit output
18
OCZ
Encoder Z-phase output (open collector)
19
SRDY+
Servo ready output +
20
SRDY-
Servo ready output -
21
ALM+
Servo alarm output+
22
ALM-
Servo alarm output-
23
NC1
Reserved (Disconnected)
24 - Reserved
25 - Reserved
26
CMD_PLS
Reserved
27
/CMD_PLS
Pulse command, pulse, orthogonal phase
difference A-phase, CCW
28
CC-P
24V for pulse command PSL
29
CC-D
24V for pulse command DIR
30
CMD_DIR
Reserved
31
/CMD_DIR
Pulse command, direction, orthogonal phase
difference B-phase, CW

59
32 - Reserved
33 - Reserved
34 - Reserved
35 - Reserved
36
OUT_A
Encoder A phase output
37
/OUT_A
Encoder /A phase output
38
OUT_B
Encoder B phase output
39
/OUT_B
Encoder /B phase output
40
OUT_Z
Encoder Z phase output
41
/OUT_Z
Encoder /Z phase output
42
SG
Signal ground
43
485
RS-485 communication data
44
/485
RS-485 communication /data
45
SG
Signal ground
46
NC2
Reserved(Disconnected)
47 - Reserved
48 - Reserved
49 - Reserved
50 - Reserved

60
Note 1)Control power supply(24V, G24V) and I/O power (COM+, COM-) share the same power supply(For the models of
750W or less).
Note 2)If there is drive inductive load(relay), please use protective circuits(diode).
Note 3) Transistor output is an open collector output circuit of the Darlington-connected. It should be connected with relay or
optocoupler. Please don’t connect transistor directly because the voltage VCE(SAT) between collector and emitter is about
1V which cannot meet the required voltage VIL of TTL IC when transistor is ON.
Note 4) Terminal resistance must be connected as shown in the wiring diagram.
Note 5) Connect the signal ground on the host control device of output signal of the encoder. The connection of signal ground
and power supply GND may cause malfunction.
Note 6) If the pulse width of Z-phase is too narrow to identify the host control device, please reduce the encoder pulse output
division and multiplication No.276.0, 278.0 or reduce the speed to increase the pulse width.[Pulse width]=1/speed/(division
and multiplication×217).
61
5.2.3 Pulse position command input (5V open collector input)
Name
Symbol
Terminal
No.
Signal name
Contents
User I/O
●24V power
supply input
●Parallel I/O
●Pulse command
input
●ABZ output
CN1
1
24V
Drive control power supply 24V input
2
G24V
Drive control power supply GND
3
COM+
I/O power supply 24V input
4
SVON
Servo ON input
5
RESET
Alarm reset input
6
HOLD
Command input restriction
7
PCLR
Deviation counter clear input
8 - Reserved
9
CCWL
CCW drive input restriction
10
CWL
CW drive input restriction
11
TLSEL1
Torque limit input
12
COM-
I/O power supply GND
13
MBRK
Brake release output
14
SERVO
Servo status output
15
POSIN
Position completion output
16 - Reserved
17
T-LIMIT
Torque limit output
18
OCZ
Encoder Z-phase output (open collector)
19
SRDY+
Servo ready output +
20
SRDY-
Servo ready output -
21
ALM+
Servo alarm output+
22
ALM-
Servo alarm output-
23
NC1
Reserved (Disconnected)
24 - Reserved
25 - Reserved
26
CMD_PLS
5V for pulse command PLS
27
/CMD_PLS
Pulse command, pulse, orthogonal phase
difference A-phase, CCW
28
CC-P
Reserved
29
CC-D
Reserved
30
CMD_DIR
5V for pulse command DIR
31
/CMD_DIR
Pulse command, direction, orthogonal phase

62
difference B-phase, CW
32 - Reserved
33 - Reserved
34 - Reserved
35 - Reserved
36
OUT_A
Encoder A phase output
37
/OUT_A
Encoder /A phase output
38
OUT_B
Encoder B phase output
39
/OUT_B
Encoder /B phase output
40
OUT_Z
Encoder Z phase output
41
/OUT_Z
Encoder /Z phase output
42
SG
Signal ground
43
485
RS-485 communication data
44
/485
RS-485 communication /data
45
SG
Signal ground
46
NC2
Reserved(Disconnected)
47 - Reserved
48 - Reserved
49
CC-P(5V)
5V for pulse command PLS (Built in current
limiting resistor )
50
CC-D(5V)
5V for pulse command DIR (Built in current
limiting resistor )

63
Note 1)Control power supply(24V, G24V) and I/O power (COM+, COM-) share the same power supply(For the models of
750W or less).
Note 2)If there is drive inductive load(relay), please use protective circuits(diode).
Note 3) Transistor output is an open collector output circuit of the Darlington-connected. It should be connected with relay or
optocoupler. Please don’t connect transistor directly because the voltage VCE(SAT) between collector and emitter is about
1V which cannot meet the required voltage VIL of TTL IC when transistor is ON.
Note 4) Terminal resistance must be connected as shown in the wiring diagram.
Note 5) Connect the signal ground on the host control device of output signal of the encoder. The connection of signal ground
and power supply GND may cause malfunction.
Note 6) If the pulse width of Z-phase is too narrow to identify the host control device, please reduce the encoder pulse output
division and multiplication No.276.0, 278.0 or reduce the speed to increase the pulse width.[Pulse width]=1/speed/(division
and multiplication×217).

64
5.2.4 Setting of basic parameter (Pulse position command input)
The factory setting is 「Pulse position command input」. It is necessary to set the following parameters if the drive is driven by
pulse position command input.
Table 5.2.4 Parameter of control mode (Pulse position command input)
Parameter No.
Parameter
Operation · Value
2.0
Control mode selection
Set to “0”.
3.0
Command mode selection
Set to “1”.
32.0
Pulse command input mode
Select one in the following (Note 1)
“0”: Pulse / direction
“1”: Orthogonal phase difference
“2”: CCW/CW
34.0
Command division and multiplication (Numerator)
Set to “32768”(Note 2)
36.0
Command division and multiplication (Denominator)
Set to “(The number of output pulse of host control
mode)/4” (Note 2)
Note 1: Pulse command input list is shown in the following table.
Table 5.2.5 Pulse command input list
Parameter
No.32.0 pulse
command input
mode
Input signal
Signal name
The minimum necessary time range (t1, t2, t3, t4, t5, t6)
CW
CCW
0
(Initial value)
Pulse ·direction
Command pulse
Pulse
CMD_PLS
Direction
CMD_DIR
1
AB-phase
orthogonal phase
pulse
A-phase
CMD_PLS
B-phase
CMD-DIR
2
CW pulse
CCW pulse
CCW CMD-PLS
CW CMD-DIR
Note 2: Set when 1-rotation pulse (131,072) of host control device and drive is different. For details, refer to 「Chapter 4
Parameter list」.
Set the following parameters according to the using status.
Table 5.2.6 Parameter for pulse train position command input
Parameter No.
Parameter
Description
32.1
Pulse train command input Rotation direction
For details, refer to 5.2.7.
32.3
Selection of Pulse train input logic
Select the logic of pulse train
33.0
Pulse train command - Input filter selection
Reduce the misoperation caused by input
command pulse interference.

65
64.0
Positioning completion determination method
Specify the conditions of positioning completion.
68.0
Positioning completion range
69.0
Positioning completion speed
70.0
Positioning completion Pulse train command
input (speed)
71.0
Positioning completion Detection delay time
66.0
Position command smoothing filter 1 selection
Set the damping filter.
Suppress the resonance of device when the
acceleration/ deceleration command is too high or
positioning.
66.1
Position command smoothing filter 2 selection
80.0
Position command smoothing filter 1 Moving
average order
81.0
Position command smoothing filter 2 Moving
average order
Table 5.2.7 The setting of parameter 32.1 and the rotation direction of motor (Pulse train position command input)
Value of parameter 32.1
Command pulse of host control device
CW
CCW
0
1
[Initial value]
5.2.5 Test run (Pulse train position command input)
■Before test run
Table 5.2.8
Make sure all the wiring are connected properly before
switch on the power to the drive and motor.
To prevent electric shock, fire, malfunction and injury.
Test run after setting the basic parameters.
If set the wrong basic parameters, the motor will not
run, run unsteadily or lose control, which may cause
some injury or accidents.
Confirm the operation of the motor alone first before test
run. (Remove the other connection to the mechanics.)
The unexpected movements, such as unstable action
or lose control, may cause tome injury or accidents.
Drive the motor after release the brake on the motor if
the motor is attached with the brake.
If not, it may cause the malfunction to the brake and
motor.
■Test run
Table 5.2.9 Steps for test run (Pulse train position command input)
Steps
Operation
1
Make sure all the wiring are connected properly.
2
Switch on the power to the drive.
Note 1)

66
3
Switch on the main circuit power to the drive(200V AC).
4
Make the SVON input of drive ON to start the motor excitation. (Connect the I 1 terminal to the COM-)
5
Input position command pulse at a relatively low speed from host control device to make the motor run at
a low speed(100r/min). Make sure the rotation direction of the motor is same to the setting direction.
6
Improve the position command pulse frequency gradually after confirming the safe implementation of
actual operation. Then confirm the operation until it comes to the specified speed.
Note1: The control power supply for the models of 750W or less are supplied by external 24V DC. 1kW or more are supplied
from internal. So the control power supply of models of 1kW or more can be ON or OFF by switching on or cutting off the main
circuit AC power.
5.3 Speed control mode (Analog speed command input)
5.3.1 Wiring for user I/O connector(CN1) (Analog speed command input)
Name
Symbol
Pin No.
Signal name
Contents
User I/O
●24V power
supply input
●Parallel I/O
●Pulse command
input
●ABZ output
CN1
1
24V
Drive control power supply 24V input
2
G24V
Drive control power supply GND
3
COM+
I/O power supply 24V input
4
SVON
Servo ON input
5
RESET
Alarm reset input
6
HOLD
Command input restriction(Zero speed clamp)
7 - Reserved
8 - Reserved
9
CCWL
CCW drive input restriction
10
CWL
CW drive input restriction
11
TLSEL1
Torque limit input
12
COM-
I/O power supply GND
13
MBRK
Brake release output
14
SERVO
Servo status output
15 - Reserved
16 - Reserved
17
T-LIMIT
Torque limit output
18
OCZ
Encoder Z-phase output (open collector)
19
SRDY+
Servo ready output +
20
SRDY-
Servo ready output -
21
ALM+
Servo alarm output+
22
ALM-
Servo alarm output-
23
NC1
Reserved (Disconnected)

67
24 - Reserved
25 - Reserved
26 - Reserved
27 - Reserved
28 - Reserved
29 - Reserved
30 - Reserved
31 - Reserved
32
A SPEED
Analog speed command input
33
A_GND
Analog speed command input ground
34 - Reserved
35 - Reserved
36
OUT_A
Encoder A phase output
37
/OUT_A
Encoder /A phase output
38
OUT_B
Encoder B phase output
39
/OUT_B
Encoder /B phase output
40
OUT_Z
Encoder Z phase output
41
/OUT_Z
Encoder /Z phase output
42
SG
Signal ground
43
485
EIA-485 communication data
44
/485
EIA-485 communication /data
45
SG
Signal ground
46
NC2
Reserved(Disconnected)
47 - Reserved
48 - Reserved
49 - Reserved
50 - Reserved

68
Note 1)Control power supply(24V, G24V) and I/O power (COM+, COM-) share the same power supply(For the models of
750W or less).
Note 2)If there is drive inductive load(relay), please use protective circuits(diode).
Note 3) Transistor output is an open collector output circuit of the Darlington-connected. It should be connected with relay or
optocoupler. Please don’t connect transistor directly because the voltage VCE(SAT) between collector and emitter is about
1V which cannot meet the required voltage VIL of TTL IC when transistor is ON.
Note 4) Terminal resistance must be connected as shown in the wiring diagram.
Note 5) Terminal resistance must be connected as shown in the wiring diagram.
Note 6) Connect the signal ground on the host control device of output signal of the encoder. The connection of signal ground
and power supply GND may cause malfunction.
Note 7) If the pulse width of Z-phase is too narrow to identify the host control device, please reduce the encoder pulse output
division and multiplication No.276.0, 278.0 or reduce the speed to increase the pulse width.[Pulse width]=1/speed/(division

69
and multiplication×217)
5.3.2 Setting of basic parameters (Analog speed command input)
Set the basic parameters.
The following parameters must be set if the drive needs to be driven by analog speed command input.
Table 5.3.2 Parameter of control mode change(Analog speed command input)
Parameter No.
Parameter
Description
2.0
Select control mode.
Set to “1”.
3.0
Select command mode.
Set to “2”.
The parameters from [48. 0] to [78. 0] in the following table can be selected according to the actual usage.
Table 5.3.3 Parameter of analog speed command input
Parameter No.
Parameter
Description
48.0
Analog speed command input -Filter constant(Numerator)
Filter out the input command voltage
interference. Use it with parameter 62.1.
49.0
Analog speed command input -Filter constant(Denominator)
50.0
Analog speed command input -Gain (Numerator)
Set the speed at the maximum command
input voltage (±10V). (Note 1)
51.0
Analog speed command input -Gain (Denominator)
52.0
Analog speed command CCW speed limit override value
(Numerator)
Set speed limit value at CCW
rotation.(Note 2)
53.0
Analog speed command CCW speed limit override value
(Denominator)
54.0
Analog speed command CW speed limit override value
(Numerator)
Set speed limit value at CW
rotation.(Note 2)
55.0
Analog speed command CW speed limit override value
(Denominator)
60.0
Analog speed command - Fixed offset value
The motor speed is 0[ r/mi n] by
adjusting the command input to 0V. Use
it with parameter 62.2.
62.0
Analog speed command - Rotational direction
For details, refer to table 5.3.4.
62.1
Analog speed command - Selection of input filter
Please use it with parameter 48.0 , 49.0.
62.2
Analog speed command - Selection of offset tuning method
Please use it with parameter 60.0.
77.0
Speed command smoothing filter selection
Please use it with parameter 78.0.
78.0
Moving average time for Speed command smoothing filter
Use it when the speed of motor is not
stable. And use it with parameter 77.0.
Note 1: Set the maximum speed for the motor in parameter 51.0(Denominator). Set the expected maximum speed in
parameter 50.0(Numerator).
Example) Make the following settings if the motor with the maximum speed of 5000 [r /mi n] needs to set to 3000 [r /mi n] at the
maximum command input voltage (±10V).
Table 5.3.4 Analog speed command input Gain settings
Parameter No.
Parameter
Setting value
50.0
Analog speed command input -Gain (Numerator)
“3000”
51.0
Analog speed command input -Gain (Denominator)
“5000”
Note 2: Set the maximum speed for the motor in parameter 53.0, 55.0(Denominator). Set the expected speed limit value in
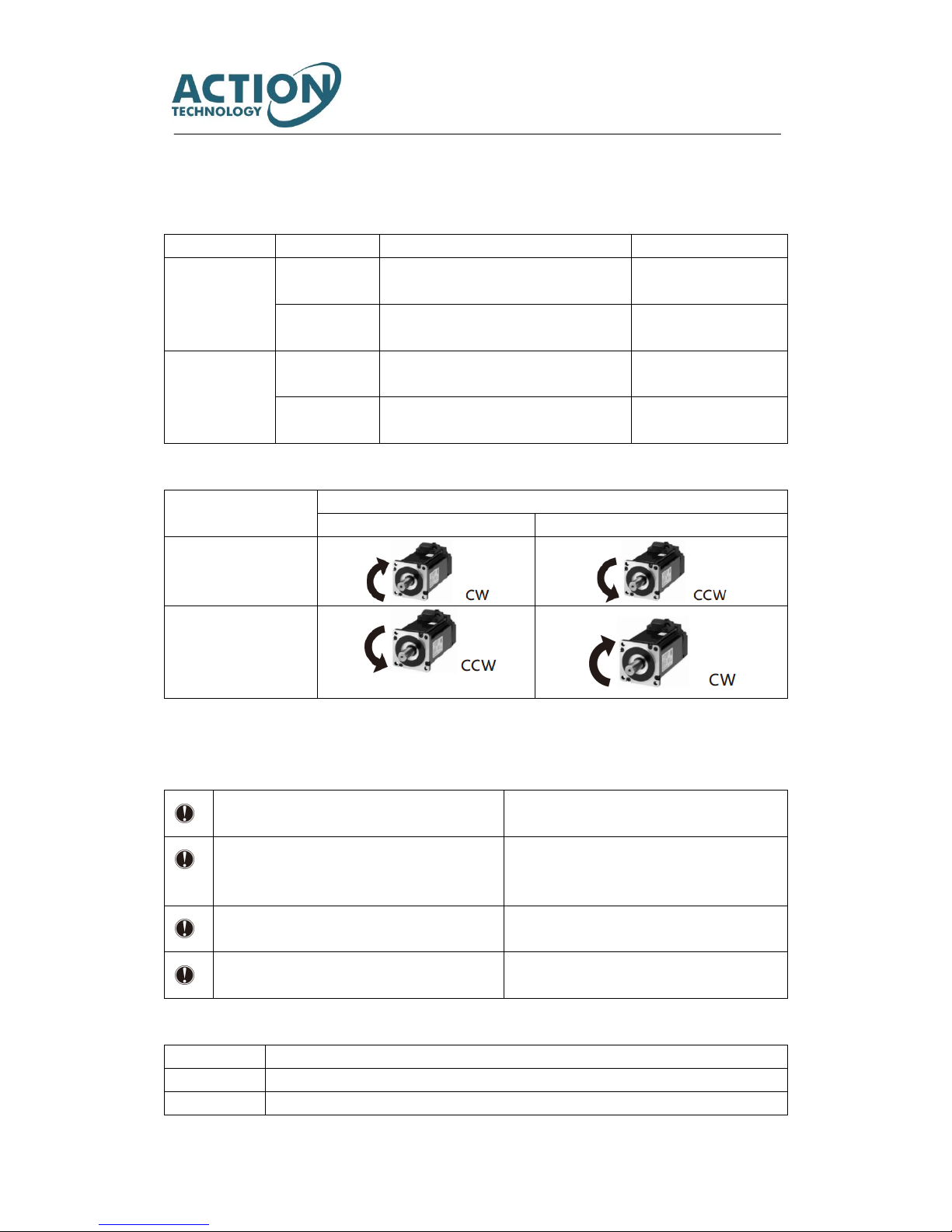
70
parameter 52.0, 54.0(Numerator).
Example) Make the following settings if the motor with the maximum speed of 5000 [r /mi n] needs to set to the maximum
speed limit value of 3000 [r /mi n].
Table 5.3.5 Analog speed command Speed limit value settings
Rotation direction
Parameter No.
Parameter
Setting value
CCW
52.0
Analog speed command
CCW speed limit value(Numerator)
“3000”
53.0
Analog speed command
CCW speed limit value(Denominator)
“5000”
CW
54.0
Analog speed command
CW speed limit value(Numerator)
“3000”
55.0
Analog speed command
CW speed limit value(Denominator)
“5000”
Table 5.3.6 Parameter 62.0 settings and rotation direction of the motor (Analog speed command input)
Value of parameter 62.0
Input analog command
Positive voltage
Negative voltage
0
1
[Initial value]
5.3.3 Test run (Analog speed command input)
■Before test run
Table 5.3.7
Make sure all the wiring are connected properly before
switch on the power to the drive and motor.
To prevent electric shock, fire, malfunction and injury.
Test run after setting the basic parameters.
If set the wrong basic parameters, the motor will not
run, run unsteadily or lose control, which may cause
some injury or accidents.
Confirm the operation of the motor alone first before test
run. (Remove the other connection to the mechanics.)
The unexpected movements, such as unstable action
or lose control, may cause tome injury or accidents.
Drive the motor after release the brake on the motor if
the motor is attached with the brake.
If not, it may cause the malfunction to the brake and
motor.
■Test run
Table 5.3.8 Steps for test run (Analog speed command input)
Steps
Operation
1
Make sure all the wiring are connected properly.
2
Switch on the power to the drive.
Note 1)

71
3
Switch on the main circuit power to the drive(200V AC).
4
Connect SVON terminal of CN1 connector to COM- to make the servo ON.
5
Input the analog speed command voltage at a low voltage to make the motor run at a low speed.
6
Improve the position command pulse frequency gradually after confirming the safe implementation of
actual operation. Then confirm the operation until it comes to the specified speed.
Note1: The control power supply for the models of 750W or less are supplied by external 24V DC. 1kW or more are supplied
from internal. So the control power supply of models of 1kW or more can be ON or OFF by switching on or cutting off the main
circuit AC power.
5.4 Speed control mode (Internal speed command)
5.4.1 Wiring for user I/O connector(CN1) (Internal speed command)
Name
Symbol
Pin No.
Signal name
Contents
User I/O
●24V power
supply input
●Parallel I/O
●Pulse command
input
●Analog input
●ABZ output
CN1
1
24V
Drive control power supply 24V input
2
G24V
Drive control power supply GND
3
COM+
I/O power supply 24V input
4
SVON
Servo ON input
5
RESET
Alarm reset input
6
VCRUN1
Input internal speed command-start 1(CCW ON)
7
VCRUN2
Input internal speed command-start 1(CW ON)
8
VCSEL1
Input internal speed command-Speed command
selection 1
9
VCSEL2
Input internal speed command-Speed command
selection 2
10
VCSEL3
Input internal speed command-Speed command
selection 3
11
TLSEL1
Torque limit input
12
COM-
I/O power supply GND
13
MBRK
Brake release output
14
SERVO
Servo status output
15 - Reserved
16 - Reserved
17
T-LIMIT
Torque limit output
18
OCZ
Encoder Z-phase output (open collector)
19
SRDY+
Servo ready output +
20
SRDY-
Servo ready output -
21
ALM+
Servo alarm output+

72
22
ALM-
Servo alarm output-
23
NC1
Reserved (Disconnected)
24 - Reserved
25 - Reserved
26 - Reserved
27 - Reserved
28 - Reserved
29 - Reserved
30 - Reserved
31 - Reserved
32 - Reserved
33 - Reserved
34 - Reserved
35 - Reserved
36
OUT_A
Encoder A phase output
37
/OUT_A
Encoder /A phase output
38
OUT_B
Encoder B phase output
39
/OUT_B
Encoder /B phase output
40
OUT_Z
Encoder Z phase output
41
/OUT_Z
Encoder /Z phase output
42
SG
Signal ground
43
485
EIA-485 communication data
44
/485
EIA-485 communication /data
45
SG
Signal ground
46
NC2
Reserved(Disconnected)
47 - Reserved
48 - Reserved
49 - Reserved
50 - Reserved

73
Note 1)Control power supply(24V, G24V) and I/O power (COM+, COM-) share the same power supply(For the models of
750W or less).
Note 2)If there is drive inductive load(relay), please use protective circuits(diode).
Note 3) Transistor output is an open collector output circuit of the Darlington-connected. It should be connected with relay or
optocoupler. Please don’t connect transistor directly because the voltage VCE(SAT) between collector and emitter is about
1V which cannot meet the required voltage VIL of TTL IC when transistor is ON.
Note 4) Terminal resistance must be connected as shown in the wiring diagram.
Note 5) Connect the signal ground on the host control device of output signal of the encoder. The connection of signal ground
and power supply GND may cause malfunction.
Note 6) If the pulse width of Z-phase is too narrow to identify the host control device, please reduce the encoder pulse output
division and multiplication No.276.0, 278.0 or reduce the speed to increase the pulse width.[Pulse width]=1/speed/(division
and multiplication×217)

74
5.4.2 Setting of basic parameters (Internal speed command)
Set the basic parameters.
The following parameters must be set if the drive needs to be driven by internal speed command.
Table 5.4.2 Parameters of control mode change (Internal speed command)
Parameter No.
Parameter
Description
2.0
Select control mode
Set to “1”.
3.0
Select command mode
Set to “3”.
388.0
Type of internal speed command
Set to “1”.
Table 5.4.3 Speed parameter of internal speed command
Parameter No.
Parameter
Description
390.0
Acceleration time (Note 1)
Initial value: 1000 [ms]
391.0
Deceleration time (Note 2)
Initial value: 1000 [ms]
392.0
Target speed 1
Initial value: 500 [r/mi n]
393.0
Target speed 2
Initial value: 1000 [r/mi n]
394.0
Target speed 3
Initial value: 1500 [r/mi n]
395.0
Target speed 4
Initial value: 2000 [r/mi n]
396.0
Target speed 5
Initial value: 2500 [r/mi n]
397.0
Target speed 6
Initial value: 3000 [r/mi n]
398.0
Target speed 7
Initial value: 4000 [r/mi n]
399.0
Target speed 8
Initial value: 5000 [r/mi n]
Note 1) Time for speed command from 0 [r /mi n] to 1000 [r /mi n].
Note 2) Time for speed command from 1000 [r /mi n] to 0 [r /mi n].
Points
5.4.3 Test run (Internal speed command)
■Before test run
Table 5.4.4
Make sure all the wiring are connected properly before
switch on the power to the drive and motor.
To prevent electric shock, fire, malfunction and injury.
Test run after setting the basic parameters.
If set the wrong basic parameters, the motor will not
run, run unsteadily or lose control, which may cause
some injury or accidents.
Confirm the operation of the motor alone first before test
run. (Remove the other connection to the mechanics.)
The unexpected movements, such as unstable action
or lose control, may cause tome injury or accidents.
Drive the motor after release the brake on the motor if
the motor is attached with the brake.
If not, it may cause the malfunction to the brake and
motor.
The speed setting parameter from [392.0] to [399.0] can be set in the specified
range, but some models cannot reach the speed shown on the setting pane. For
the target speed setting, please refer to the specification of the motor.

75
■Test run
Table 5.4.5 Steps for test run (Internal speed command)
Steps
Operation
1
Make sure all the wiring are connected properly.
2
Switch on the power to the drive.
Note 1)
3
Switch on the main circuit power to the drive(200V AC).
4
Make the SVON input of drive ON to start the motor excitation. (Connect the I 1 terminal to the COM-)
5
Select the target speed according to the ON/OFF combination of I 5(VCSEL1),I 6(VCSEL2)and I 7
(VCSEL3). When I 3(VCRUN1)or I 4(VCRUN2), it will rotate according to the setting direction.
ON: COM- short-circuit
OFF: COM- open-circuit
Note1: The control power supply for the models of 750W or less are supplied by external 24V DC. 1kW or more are supplied
from internal. So the control power supply of models of 1kW or more can be ON or OFF by switching on or cutting off the main
circuit AC power.
Table 5.4.6 Motor rotation direction of internal speed command
Motor rotation direction
Operation
(I 3)VCRUN1
(I 4)VCRUN2
CCW
ON
OFF
CW
OFF
ON
Motor stop
OFF
OFF
Motor stop
ON
ON
Table 5.4.7 Motor rotation of internal speed command
Target speed
Operation
I 5 (VCSEL1)
(CN1 8 pins)
I 6 (VCSEL2)
(CN1 9 pins)
I 7 (VCSEL3)
(CN1 10 pins)
1
OFF
OFF
OFF 2 ON
OFF
OFF 3 OFF
ON
OFF 4 ON
ON
OFF 5 OFF
OFF
ON 6 ON
OFF
ON 7 OFF
ON
ON 8 ON
ON
ON
5.5 Torque control mode (Analog torque command input)
5.5.1 Wiring for user I/O connector (CN1)(Analog torque command input)
Table 5.5.1

76
Name
Symbol
Pin No.
Signal name
Contents
User I/O
●24V power
supply input
●Parallel I/O
●Pulse command
input
●Analog input
●ABZ output
CN1
1
24V
Drive control power supply 24V input
2
G24V
Drive control power supply GND
3
COM+
I/O power supply 24V input
4
SVON
Servo ON input
5
RESET
Alarm reset input
6
HOLD
Command input restriction(Zero speed clamp)
7 - Reserved
8 - Reserved
9
CCWL
CCW drive input restriction
10
CWL
CW drive input restriction
11
TLSEL1
Torque limit input
12
COM-
I/O power supply GND
13
MBRK
Brake release output
14
SERVO
Servo status output
15 - Reserved
16 - Reserved
17
T-LIMIT
Torque limit output
18
OCZ
Encoder Z-phase output (open collector)
19
SRDY+
Servo ready output +
20
SRDY-
Servo ready output -
21
ALM+
Servo alarm output+
22
ALM-
Servo alarm output-
23
NC1
Reserved (Disconnected)
24 - Reserved
25 - Reserved
26 - Reserved
27 - Reserved
28 - Reserved
29 - Reserved
30 - Reserved
31 - Reserved
32
A_TRQ
Analog torque command input
33
A_GND
Analog speed command input ground
34 - Reserved
35 - Reserved

77
36
OUT_A
Encoder A phase output
37
/OUT_A
Encoder /A phase output
38
OUT_B
Encoder B phase output
39
/OUT_B
Encoder /B phase output
40
OUT_Z
Encoder Z phase output
41
/OUT_Z
Encoder /Z phase output
42
SG
Signal ground
43
485
EIA-485 communication data
44
/485
EIA-485 communication /data
45
SG
Signal ground
46
NC2
Reserved(Disconnected)
47 - Reserved
48 - Reserved
49 - Reserved
50 - Reserved

78
Note 1)Control power supply(24V, G24V) and I/O power (COM+, COM-) share the same power supply(For the models of
750W or less).
Note 2)If there is drive inductive load(relay), please use protective circuits(diode).
Note 3) Transistor output is an open collector output circuit of the Darlington-connected. It should be connected with relay or
optocoupler. Please don’t connect transistor directly because the voltage VCE(SAT) between collector and emitter is about
1V which cannot meet the required voltage VIL of TTL IC when transistor is ON.
Note 4) Terminal resistance must be connected as shown in the wiring diagram.
Note 5) Terminal resistance must be connected as shown in the wiring diagram.
Note 6) Connect the signal ground on the host control device of output signal of the encoder. The connection of signal ground
and power supply GND may cause malfunction.
Note 7) If the pulse width of Z-phase is too narrow to identify the host control device, please reduce the encoder pulse output
division and multiplication No.276.0, 278.0 or reduce the speed to increase the pulse width.[Pulse width]=1/speed/(division
and multiplication×217)

79
5.5.2 Setting of basic parameter (Analog torque command input)
Set the basic parameters.
The following parameters must be set if the drive needs to be driven by analog torque command input.
Table 5.5.2 Parameters of control mode change (Analog torque command input)
Parameter No.
Parameter
Description
2.0
Select control mode
Set to “2”.
3.0
Select command mode
Set to “2”.
The user can select the parameter [152.0], [288.0] to [302.0] in the following table according to the actual usage.
For details, refer to 「Chapter 4 Parameter」.
Parameter No.
Parameter
Description
152.0
Analog torque command Speed limit [rpm]
Set the speed limit value.
288.0
Analog torque command input filter (Numerator)
Filter out the input command voltage
interference. Use it with parameter 302.1.
289.0
Analog torque command input filter (Denominator)
290.0
Analog torque command input gain (Numerator)
Set the torque at the maximum command
input voltage (±10V). (Note 1)
291.0
Analog torque command input gain (Denominator)
292.0
Analog torque command CCW torque limit Override
(Numerator)
Set torque limit value at CCW rotation.(Note
2)
293.0
Analog torque command CCW torque limit
Override(Denominator)
294.0
Analog torque command CW torque limit Override
(Numerator)
Set torque limit value at CW rotation.(Note
2)
295.0
Analog torque command CW torque limit
Override(Denominator)
300.0
Analog speed command - Fixed offset value
The motor speed is 0[ 0.1%] by adjusting the
command input to 0V. Use it with parameter
302.2..
302.0
Analog speed command - Rotational direction
For details, refer to table 5.5.6.
302.1
Analog speed command - Selection of input filter
Please use it with parameter 288.0, 289.0.
302.2
Analog speed command - Selection of offset tuning
method
Please use it with parameter 300.0.
Note 1: Set the maximum torque for the motor in parameter 289.0(Denominator). Set the expected maximum torque in
parameter 288.0(Numerator).
Example) Make the following settings if the motor with the maximum torque of 3000 [0.1%] needs to set to 1000 [0.1%] at the
maximum command input voltage (±10V).
Table 5.5.4 Analog torque command input filter settings
Parameter No.
Parameter
Setting value
288.0
Analog torque command Input filter constant (Numerator)
“1000”
289.0
Analog torque command Input filter constant (Denominator)
“3000”
Note 2: Set the maximum torque for the motor in parameter 293.0, 295.0(Denominator). Set the expected torque limit value in
parameter 292.0, 294.0(Numerator).

80
Example) Make the following settings if the motor with the maximum torque of 3000 [0.1%] needs to set to the maximum
speed limit value of 1000 [0.1%].
Table 5.5.5 Analog torque command input Torque limit value settings
Rotation direction
Parameter No.
Parameter
Setting value
CCW
292.0
Analog torque command
CCW torque limit value(Numerator)
“1000”
293.0
Analog torque command
CCW torque limit value (Denominator)
“3000”
CW
294.0
Analog torque command
CW torque limit value (Numerator)
“1000”
295.0
Analog torque command
CW torque limit value (Denominator)
“3000”
Table 5.5.6 Parameter 302.0 settings and rotation direction of the motor (Analog torque command input)
Value of parameter 62.0
Input analog command
Positive voltage
Negative voltage
0
1
[Initial value]
5.5.3 Test run (Analog torque command input)
■Before test run
Table 5.5.7
Make sure all the wiring are connected properly before
switch on the power to the drive and motor.
To prevent electric shock, fire, malfunction and injury.
Test run after setting the basic parameters.
If set the wrong basic parameters, the motor will not
run, run unsteadily or lose control, which may cause
some injury or accidents.
Confirm the operation of the motor alone first before test
run. (Remove the other connection to the mechanics.)
The unexpected movements, such as unstable action
or lose control, may cause tome injury or accidents.
Drive the motor after release the brake on the motor if
the motor is attached with the brake.
If not, it may cause the malfunction to the brake and
motor.
■Test run
Table 5.5.8 Steps for test run (Analog torque command input)
Steps
Operation
1
Make sure all the wiring are connected properly.
2
Switch on the power to the drive.
Note 1)
3
Switch on the main circuit power to the drive(200V AC).

81
4
Set a smaller value about 500 in parameter 152.0(speed limit value) to limit the speed.
5
Make the SVON input of drive ON to start the motor excitation. (Connect the I 1 terminal to the COM-)
6
Input the analog torque command voltage at a low voltage to make the motor run at a low speed.
7
Improve the analog torque command voltage gradually after confirming the safe implementation of actual
operation. Set the actual value in parameter 152.0(speed limit value).
Note1: The control power supply for the models of 750W or less are supplied by external 24V DC. 1kW or more are supplied
from internal. So the control power supply of models of 1kW or more can be ON or OFF by switching on or cutting off the main
circuit AC power.
5.6 Position control mode(Internal position command)
Set the following parameter of control mode selection and command mode selection to come into the internal position
command mode. Use the locator to test run.
Table 5.6.1 Parameter of control mode change(Internal position command)
Parameter No.
Parameter
Description
2.0
Select control mode
Set to “0”.
3.0
Select command mode
Set to “3”.
5.6.1 Locator function
Execute the positioning according to the I/O command from the host control device, such as PLC. Set the Point Table in
HCX-SETUP and have the test run of locator function in HCX-SETUP.
5.6.2 Test run
Send the command from PC according to the steps, not the command from host control device(such as PLC), and have the
test run, such as back and forth movement.
Use HCX-SETUP to have the test run.
For details, refer to 「HCX-SETUP User’s Manual」.
5.6.3 Precautions
1) Alarm code No.10 「Position command overflow/ Home position reset failure」will happen in the following two conditions.
1. Out of the range of -1, 073, 741, 823~+1, 073, 741, 823 「Command unit」
2. 「Internal position command - Overflow detection option」(Parameter No.643.0) is set to “1=Enable”
Considering the above factors, please set 「Internal position command - Overflow detection option」(Parameter No.643.0)
according to the following table.
Table 5.6.2 Parameter setting of internal position command mode
Operation method(Function)
Internal position command - Overflow detection option
(Parameter No.643.0)
Command
Positioning function
Absolute value
0=Disable
Note 1)
1=Enable
Relative value
0=Disable
Test run
Note 1) The home position in the drive may disappear sometimes. Please reset the home position after parameter setting.
2) Please set 「Selection of Auto interpolation for command division and multiplication」(Parameter No.32.2) to “1=Enable”.
Initial value is “1=Enable”. When “0=Disable” is set, the speed change will become large.

82
5.7 Description of User I/O connector (CN1) terminal arrangements
Figure 5.7.1 Terminal arrangements
Figure 5.7.2 Connector
5.7.1 Signal description
Signal
name
Pin
No.
Contents
Function
24V
1
Drive control power supply
24V input
●Connect with +24V of 24VDC external power supply
●The power supply voltage is 24VDC±10%、100mA(Typ.)
●24VDC external power supply should meet the following condition:
Using SELV power supply(※).
※SELV: safety extra low voltage
(Reinforced insulation is needed for safety extra low voltage, non-dangerous voltage and
dangerous voltage.)
G24V
2
Drive control power supply
GND
●Connect to GND of 24VDC external power supply
COM+
3
I/O power supply 24V input
●Connect the common terminal of 24VDC power supply used for I/O and optical coupler
circuit used
●Power voltage: 24VDC±10%、100mA(Typ.)
I1 4 I1 input
●Parallel I/O input
●The function varies according to the different control mode/ command mode. For details,
refer to 「Table 5.7.2 I/O input signal 」
Control
mode
Position control
Speed control
Torque
control
Comma
nd
mode
Pulse train
command
Internal
regeneration
command
Analog
command
Internal
regeneration
command
Analog
command
I2 5 I2 input
I3 6 I3 input
I4 7 I4 input
I5 8 I5 input
I6 9 I6 input
I7
10
I7 input
I8
11
I8 input

83
I1
SVON
I2
RESET
RESET/PCLR
RESET
RESET
RESET
I3
HOLD
PCSTART1
HOLD
VCRUIN1
HOLD
I4
PCLR
PCSEL1
(Reserved)
VCRUIN2
(Reserved)
I5
(Reserved)
PCSEL2
(Reserved)
VCS L1
(Reserved)
I6
CCW
PC EL3
CCWL
VCSEL2
CCWL
I7
CWL
PCSEL4
CWL
VCSEL3
CWL
I8
TLSEL1
ORG
TLSEL1
TLSEL1
TLSEL1
COM-
12
I/O power supply GND
●Connected with GND of 24VDC power supply used for I/O
CMD_
PLS
26
[Differential input]
①Pulse + direction pulse
②Orthogonal phase
difference pulse-A
③CCW+CW Pulse CCW
[5V open collector circuit]
④5V power supply of input
/CMD PLS
[Differential input] Max. command pulse frequency 4Mpps
①Input pulse + direction pulse from host control device (differential input)
②Input A phase of AB phase orthogonal difference pulse signal from host control device
(differential input)
③Input CCW+CCW of CW pulse from host control device (differential input)
[5V open collector circuit] Max. command pulse frequency 200kpps
④5V power supply input terminal of /CMD_ PLS
/CMD_
PLS
27
[Differential input]
①Pulse + direction/ pulse
②Orthogonal phase
difference pulse /A phase
③CCW+CW Pulse /CCW
[5v/24v open collector circuit]
④Pulse + direction pulse
⑤Orthogonal phase
difference pulse /A phase
⑥CCW+CW pulse CCW
[Differential input] Max. command pulse frequency 4Mpps
①Input pulse + direction/ pulse from host control device (differential input)
②Input /A phase of AB phase orthogonal difference pulse signal from host control device
(differential input)
③Input CCW +/CCW of CW from upper control device (differential input)
[5V open collector circuit] Max. command pulse frequency 200kpps
④Input pulse + pulse of direction from host control device
⑤Input A phase of AB phase orthogonal difference pulse signal from host control device
⑥Input CCW +CCW of CW pulse from host control device
CC-P
28
[24V open collector circuit
input]
① 24V of /CMD_PLS
[24V open collector circuit] Max. command pulse frequency 200kpps
①24V power supply input terminal of /CMD_PLS
CC-D
29
[24V open collector circuit
input]
① 24V of /CMD_DIR
[24V open collector circuit] Max. command pulse frequency 200kpps
①24V power supply input terminal of /CMD_DIR
CMD_
DIR
30
[Differential input]
①Pulse + direction direction
②Orthogonal phase
difference B phase
【Differential input】Max. command pulse frequency 4Mpps
①Input pulse + direction direction from host control device(differential input)
②Input B phase of AB phase orthogonal phase difference pulse signal from host control
device(differential input)

84
③CCW+CW pulse CW
[5V open collector circuit]
④5V power supply input of
/CMD_DIR
③Input CCW+CW of CW pulse from host control device (differential input)
[5V open collector circuit] Max. command pulse frequency 200kpps
④5V power supply input terminal of /CMD_DIR.
/CMD_
DIR
31
[Differential input]
①Pulse + direction /direction
②Orthogonal phase
difference /B phase
③CCW+CW pulse /CW
[5V/24V open collector
circuit]
④Pulse + direction
direction
⑤Orthogonal phase
difference B phase
⑥CCW+CW pulse CW
【Differential input】Max. command pulse frequency 4Mpps
①Input pulse + direction /direction from host control device(differential input)
②Input /B phase of AB phase orthogonal phase difference pulse signal from host control
device(differential input)
③Input CCW+CW pulse /CW from host control device (differential input)
[5V/24V open collector circuit] Max. command pulse frequency 200kpps
④Input pulse+ direction of direction from host control device
⑤Input B phase of AB phase orthogonal difference pulse signal from host control device
⑥Input CCW+CW of CW pulse from host control device
A_SPE
ED/
A_TR
Q
32
Analog speed command
input/ Analog torque
command input+
●Input speed or torque command in the voltage from -10V to 10V.
A_GND 33
Signal ground
Analog speed command
input - /
Signal ground
Analog torque command
input - /
●Connect the signal ground of analog speed input or analog torque input in the servo drive.
SG
42
Signal ground
●Signal ground of ABZ phase output of position feedback
485
43
485 of RS-485
communication
●485 data (+) signal of RS-485 communication with host control device
/485
44
/485 of RS-485
communication
●/485 data (+) signal of RS-485 communication with host control device
SG
45
Signal ground
●Signal ground of RS-485 communication with host control device
CC-P(
5V)
49
[5V open collector input]
① 5V for /CMD_PLS
Built-in current limiting
resistor
[5V open collector input] Max. pulse frequency 200kpps
①5V power input terminal of /CMD_PLS
CC-D(
50
[5V open collector input]
[5V open collector input] Max. pulse frequency 200kpps

85
5V)
① 5V for /CMD_DIR
Built-in current limiting
resistor
①5V power input terminal of /CMD_DIR
Table 5.7.2 I/O input signal
Signal
name
Contents
Function
Control mode
P S T
SVON
Servo ON
●Servo is ON when connecting COM-.
○ ○ ○
RESET
Alarm reset
●Reset alarms when connecting to COM-.
●But if alarm occurs in encoder, model No. and system, this signal cannot be used to reset, and
drive control power supply must be restarted(OFF→ON).
○ ○ ○
HOLD
Command
input
restriction
●When COM- connected, command input is restricted.
●If not connected, command input are permitted.
●Even if pulse is input, the motor cannot operate until the host control device allows command
input.
●When 「Command input prohibited」, whether to clear pulse counter can be set by parameter
No.67.3(the selection of position deviation counter in drive input)
●When the speed command value is 0 in speed control mode, the motor will not operate.
△ △ ○
PCLR
Deviation
counter clear
●When COM- connected, position deviation counter will be cleared.
△ - -
CCWL
CCW drive
restriction
●If COM- disconnected, CCW direction drive is prohibited.
●If the value is beyond the CCW direction movement range, please make the wiring which can
be disconnected with COM-.
●It is effective when 「2: Enable CCW-drive restriction」or「3: Enable CW/CCW-drive restriction
」is selected in parameter No.67.0「Selection of Drive restriction options」. Initial value: 「0:
Disable」
●The deceleration can be selected in parameter No.67.1 「Deceleration method selection when
Drive restriction is enabled 」. Initial value: 「1: Short brake」.
●After-stop state can be selected in parameter No.67.2 「Selection for Stop condition when
Drive restriction is enabled」. Initial value: 「0: Free-run」
●Parameter No.67.3 「Selection for Location deviation counter option when Drive restriction is
enabled」can be set to hold the position deviation counter. Initial value: 「0: Keep」
△ △ ○
CWL
CW drive
restriction
●If COM- disconnected, CW direction drive is prohibited.
●If the value is beyond the CW direction movement range, please make the wiring which can be
disconnected with COM-.
●It is effective when 「2: Enable CW-drive restriction」or「3: Enable CW/CCW-drive restriction
」is selected in parameter No.67.0「Selection of Drive restriction options」. Initial value: 「0:
Disable」
●The deceleration can be selected in parameter No.67.1 「Deceleration method selection when
△ △ ○

86
Drive restriction is enabled 」. Initial value: 「1: Short brake」.
●After-stop state can be selected in parameter No.67.2 「Selection for Stop condition when
Drive restriction is enabled」. Initial value: 「0: Free-run」
●Parameter No.67.3 「Selection for Location deviation counter option when Drive restriction is
enabled」can be set to hold the position deviation counter. Initial value: 「0: Keep」
TLSEL1
Torque limit
●Torque limit switch.
●It is effective when 「1: Enable」 is selected in parameter No.144.0「Enable/Disable Torque
command limit Override」
●At open circuit, the parameter No.147.0「Torque command limit Override 1」is preferred. At
power On, the parameter No.148.0「Torque command limit Override 2」is preferred.
△ ○ ○
PCSTAR
T1
CW start
●It is effective when the parameter No.642.0 「Internal speed command - Operation mode」 is
set to “0=Point table”.
●When PCSEL1 to 4 is specified to point No. and connected to COM-, point table No. and home
position reset can execute.
△ - -
PCSEL1
Selection 1 of
point No.
●Specify the point No. and home position reset to be executed.
●According to the setting of parameter No.646.3 「Point No.0 function selection」, when
specifying the point No.0, you can select home position reset or point No..
Point No.
PCSEL1
PCSEL2
PCSEL3
PCSEL4
0 or home
position reset
OFF
OFF
OFF
OFF
1
ON
OFF
OFF
OFF
2
OFF
ON
OFF
OFF
3
ON
ON
OFF
OFF
4
OFF
OFF
ON
OFF 5 ON
OFF
ON
OFF 6 OFF
ON
ON
OFF 7 ON
ON
ON
OFF
8
OFF
OFF
OFF
ON
9
ON
OFF
OFF
ON
10
OFF
ON
OFF
ON
11
ON
ON
OFF
ON
12
OFF
OFF
ON
ON
13
ON
OFF
ON
ON
14
OFF
ON
ON
ON
15
ON
ON
ON
ON
△ - -
PCSEL2
Selection 2 of
point No.
PCSEL3
Selection 3 of
point No.
PCSEL4
Selection 4 of
point No.
(HOME)
N
ote 1)
Home position
reset start
●Start home position reset after connecting COM-.
△ - -

87
ORG
Home position
sensor
●Home position reset with home position sensor, input the home position sensor signal.
●Polarity detection can be changed by parameter No.646.1 「Home position sensor input
polarity」. When the initial setting is to be connected to COM- and OFF, the home position sensor
is detected.
△ - -
VCRUN1
Internal speed
command start
1
●Enable when select “1=Trapezoid speed command” in parameter No.388.0.
●After connecting to COM-, the motor starts in CCW direction.
●Set acceleration/deceleration time and target speed in parameter No.390 to No.399.0. There
are 8 phases for target speed. The target speed can be switched by the combination of
VCSEL1, VCSEL2 and VCSEL3.
- △ -
VCRUN2
Internal speed
command start
2
●Enable when select “1=Trapezoid speed command” in parameter No.388.0.
●After connecting to COM-, the motor starts in CW direction.
●Set acceleration/deceleration time and target speed in parameter No.390 to No.399.0. There
are 8 phases for target speed. The target speed can be switched by the combination of
VCSEL1, VCSEL2 and VCSEL3.
- △ -
VCSEL1
Internal
command
selection 1
●Enable when select “1=Trapezoid speed command” in parameter No.388.0.
●Select the speed command of 8 phases as shown below according to the combination of
speed command selection 1 to 3.
●Set acceleration/deceleration time and target speed in parameter No.390 to No.399.0.
Target speed
VCSEL1
VCSEL2
VCSEL3
1
OFF
OFF
OFF 2 ON
OFF
OFF
3
OFF
ON
OFF
4
ON
ON
OFF 5 OFF
OFF
ON 6 ON
OFF
ON 7 OFF
ON
ON
8
ON
ON
ON
- △ -
VCSEL2
Internal
command
selection 2
VCSEL3
Internal
command
selection 3
(RESET/
PCLR)
Note 1)
Alarm clear/
deviation
counter clear
●After connecting with COM-, RESET and PCLR are executed.
△ - -
※Control mode:
P: Position control mode, S: Speed control mode, T: Torque control mode indicates it can input signals 「○ 」 and 「 △」
in different control modes. 「 △」can switch signals according to command mode. For details, please refer to user I/O
connector CN1 terminal arrangements for each command mode.
Note 1) For I/O of locator function selection 1.

88
Signal
name
Pin
No.
Contents
Function
O1
13
O1 output
●Parallel I/O output
●O7+, O7-, O8+ and O8- is differential output.
●Function varies according to different control modes and command modes. For
details, refer to the following table.
Control
mode
Position control
Speed control
Torque
control
Command
mode
Pulse train
command
Internal
regeneration
command
Analog
command
Internal
regeneration
command
Analog
command
O1
MBRK
O2
SERVO
O3
POSIN
MEND
(Reserved)
O4
(Reserved)
HEND
(Reserved)
O5
T-LIMIT
O7+
SRDY
O7-
O8+
ALM
O8-
O2
14
O2 output
O3
15
O3 output
O4
16
O4 output
O5
17
O5 output
O7+
19
O7 output
+
O7-
20
O7 output
-
O8+
21
O8 output
+
O8-
22
O8 output
O6(OCZ)
18
Encoder Z
phase
output
●Open collector output of encoder Z-phase signal
●If the Z-phase pulse width is too narrow to be identified by host control device , we
can set parameter No.276.0, 278.0 「Encoder pulse output division and multiplication
」 to reduce the division and multiplication. Or reduce the speed to expand the pulse
width. [Pulse width]=1/ speed/(division and multiplication ×217).
●Note 1)
OUT_A
36
Encoder A
phase
●Output position A phase signal to host control device(differential output).
/OUT_A
37
Encoder A
phase
●Output position A phase signal to host control device(differential output).
OUT_B
38
Encoder B
phase
●Output position B phase signal to host control device(differential output).
/OUT_B
39
Encoder B
phase
●Output position B phase signal to host control device(differential output).
OUT_Z
40
Encoder Z
phase
●Output position Z phase signal to host control device(differential output).
●Note 1)

89
/OUT_Z
41
Encoder Z
phase
●Output position Z phase signal to host control device(differential output).
●Note 1)
Note 1) Z-phase pulse width: Encoder resolution × Division and multiplication (Parameter No.276.0/No.278.0) and the motor
speed. Z-phase pulse and A-phase pulse are output simultaneously.
Table 5.7.3 I/O output signal
Signal
name
Contents
Function
Control mode
P S T
MBRK
Brake release
●After the electromagnetic brake is released, the connection with COM- should is OFF.
○ ○ ○
SERVO
Servo status
●When the servo is ON, the connection with COM- is OFF.
○ ○ ○
POSIN
Positioning
completion
●After positioning was completed, the connection with COM- is OFF.
○ - -
SRDY
Servo ready
●OFF at servo ready. When there is voltage in main circuit and no alarm, the servo can be ON.
○ ○ ○
ALM
Alarm status
●Open circuit at alarms and power OFF. Closed circuit at power ON.
○ ○ ○
T-LIMIT
Torque limit
●If the output torque of the motor is limited, the connection with COM- is closed.
●Select the output condition according to “Selection of Torque limit state output mode”.
○ ○ ○
MEND
Action
completion
●When the action of point table, communication and home position reset is completed and the
next step will start, the connection with COM- is closed circuit.
●Closed circuit at power OFF.
△ - -
HEND
Home position
reset
completion
●After the home position reset is completed, the connection with COM- is closed circuit. When
the home position disappears or home position reset, the connection with COM- is open circuit.
△ - -
(PM1)
Note 1)
Point No.
output 1
According to the output signal allocated by the special I/O setting “Position control/ Internal
regeneration command customized 1).
●Output the start or end of the Point NO..
●Select the time and contents of Point No. according to the setting of Parameter No.644.0 “Point
No. output method”.
●Open circuit (Point No. 0) when the drive power supply is ON and servo OFF, home position
reset.
PM1
PM2
PM3
Contents
OFF
OFF
OFF
Point No.0, 8 and so on
ON
OFF
OFF
Point No. 1, 9
OFF
ON
OFF
Point No.2, 10
ON
ON
OFF
Point No.3, 11
OFF
OFF
ON
Point No.4, 12
ON
OFF
ON
Point No.5, 13
OFF
ON
ON
Point No.6, 14
ON
ON
ON
Point No.7, 15
△ - -
(PM2)
Note 1)
Point No.
output 2
(PM3)
Note 1)
Point No.
output 3
90
(MEND/
TLIMIT)
Note 1)
Action
completion/
Torque limit
●Output signal allocated by special I/O setting “Position control/ Internal regeneration command
selection 1”.
●Either MEND or T-LIMIT is ON, the connection with COM- is closed circuit.
●For details, refer to the function of MEND and T-LIMIT in this table.
△ - -
※Control mode:
P: Position control mode, S: Speed control mode, T: Torque control mode indicates it can input signals 「○ 」 and 「 △」
in different control modes. 「 △」can switch signals according to command mode. For details, please refer to user I/O
connector CN1 terminal arrangements for each command mode.
Note 1) For I/O of locator function selection 1.
Table 5.7.4 Reserved pins
Signal name
Pin No.
Contents
Function
NC1
23
Reserved
●Reserved(Disconnected)
SP1
24
Reserved
-
SP2
25
Reserved
-
A_TRQ
34
Reserved
-
A_GND
35
Reserved
-
NC2
46
Reserved
●Reserved(Disconnected)
SP3
46
Reserved
-
SP4
48
Reserved
-
6. Troubleshooting and countermeasures
6.1 Alarm display
When the alarm occurs, the alarm description can be confirmed according to the alarm code on the panel of servo drive. The
alarm code and alarm description are shown in the 「Warning list」.
The alarm description can be confirmed by using [Alarm status] monitor in the dedicated software 「HCX-SETUP」of SV-X3.
For the operation methods, refer to HCX-SETUP user’s manual.
If you want to consult with ACTION TECHNOLOGY, make a record of the alarm and contact with us.
6.2 Alarm handling and alarm reset
For alarm handling and resetting, please refer to “Warning List”. There are three ways for alarm reset. It varies according
to different alarm items.
① The host control device sends reset clear signal (RESET of CN1 5pin)to the drive..
② Restart drive control power supply.
③ Press SHIFT+UP at the same time.
Table 6.2.1
No
Alarm description
Occurrence
Cause and handling ways

91
.
time
0
System alarm
After the
control power
supply is ON.
●Control circuit error
Restart control power
supply
1
EEP data error
●Parameter writing error
●After confirming cables, rewrite the parameters.
RESET signal (※)
2
Model code error
●Model code cannot be read.
●Confirm the combination of motor and drive.
●Please confirm the encoder cable.
Restarting control power
supply
4
Overspeed error
After the
servo is ON
●Position control and speed control error.
●Please adjust the parameters.
RESET signal (※)
5
Speed deviation
error
6
Position deviation
error
7
Overload error
8
Command
overspeed error
9
Encoder pulse
output frequency
error
●The encoder pulse output frequency is over 4Mpps
●Confirm the value of command division/multiplication
frequency
●Confirm the number of command pulse
12
Overheat error
●Overheat error of control circuit
●Reduce ambient temperature
●Set the drive in accordance with 「Installation direction
and clearances」
14
Overvoltage error
●Overvoltage error of control main circuit
●Confirm regenerative resistor warning by setting panel.
Please install a regenerative resistor if necessary.
15
Power supply error
●The voltage on the main circuit power supply is too low
or too high. If 200VAC error occurs, there is error after
the regenerative power is ON.
●Please confirm the 220VAC power supply cable and
distribution wiring of main circuit power supply
●Adjust 200VAC power input and servo ON time
according to timing chart. Confirm the regenerative
resistor warning signal on the setting panel. Please install
a regenerative resistor if necessary.
16
Encoder 1
After the
●The encoder data changes significantly in a sudden.
Restarting control power

92
(communication
data error)
control power
supply is ON.
●Confirm the contact of encoder cable terminal.
●Take measures of grounding , separating layouts of
motor power cable and encoder cable.
supply
17
Encoder
communication error
2 (No response)
●Encoder communication cut off error.
●Confirm the contact of encoder cable terminal.
●Take measures of grounding , separating layouts of
motor power cable and encoder cable..
●Shorten the encoder cable if it’s too long.
18
Encoder error
●Encoder itself error
19
Encoder
communication error
3 (duplex
communication
error)
●Encoder communication initialization error
●Please confirm the wiring for encoder cables.
●Shorten the encoder cable if it’s too long
20
Multi-revolution data
error
●Multi-revolution data changes significantly in a sudden
●Confirm the contact of encoder cable terminal.
●Take measures of grounding , separating layouts of
motor power cable and encoder cable.
21
Encoder error
undervoltage
●Multi-revolution data changes significantly in a sudden
●When using absolute encoder, please confirm whether
the battery voltage is too low or battery connection is off.
After encoder error clear
in HCX-SETUP, restart
the control power supply.
22
Control power
supply undervoltage
error
After servo
ON
●The voltage of control power supply(24VDC) is too low
RESET signal (※)
23
Base circuit isolation
●There is no power supply for base circuit.
RESET signal (※)
24
Overcurrent error
●Control circuit error
●Please confirm UVW connection of motor power cable
and distribution wiring of main circuit.
●If there is sudden CCW/CW reverse rotation, extend the
acceleration/deceleration time or use smoothing
command to slow the reverse rotation.
RESET signal (※)
25
Inverter error 1
●Control circuit error.
●Please confirm UVW connection of motor power cable
and distribution wiring of main circuit.
26
Inverter error 2
(servo ON overtime)
27
Current encoder
error
●Current sensor error.

93
6.3 Troubleshooting
When no alarm occurs, confirm the following items if the drive does not operate and the motor does not rotate.
Status
Description
Reference items
Troubleshooting 1
No display on setting
panel
Switch on the control power supply (24V DC), but on any display
「 」on the setting panel.
Table 6.3.1
Troubleshooting 2
Servo not ON
Even though 「 」is displayed on the setting panel,
the servo cannot start.
Table 6.3.2
Troubleshooting 3
Motor cannot rotate
The servo is ON, but the motor will not operate.
Table 6.3.3
Troubleshooting 4
Motor operation not
steady
The motor operates unsteadily.
Table 6.3.4
Troubleshooting 5
Vibration and sound
Vibration and sound occurs when the motor operates.
Table 6.3.5
■Troubleshooting 1 (No display on setting panel)
Switch on the control power supply (24V DC), but on any display 「 」on the setting panel.
Table 6.3.1
Cause
What to do
The user I/O connector is not connected to 24V
DC.
Connecting 24V DC to the user I/O connector.
Pin1 and 3 is connected to 24V DC. Pin2 and 12 is connected to GND.
The user I/O connector loosens.
Check the connection and make sure it’s OK.
24V DC voltage drops.
Check the capacity of 24V DC.
Drive itself failure.
Consult with ACTION TECHNOLOGY.
94
■Troubleshooting 2 (Servo not ON)
Even though 「 」is displayed on the setting panel, the servo cannot start.
Table 6.3.2
Cause
What to do
There is no servo ON(SVON) signal input.
Input SVON signal of host control device to the user I/O connector.
Alarm No.15 occurs.
There is no 200V AC input.
Make sure CHARGE LED is ON. If not, check if the 200V AC input
connector(L1/L2/L3) is loosen or the 200V AC is output or not.
Alarm No.15 occurs.
There is no main circuit power input in
multi-axial drive.
Connect the main circuit power supply.
The motor power output connector (U/V/W)
loosen.
Check the connection and make sure it’s OK.
Make sure if it’s connected in accordance with the connector installing
method in the user’s manual.
Drive itself failure.
Consult with ACTION TECHNOLOGY.
■Troubleshooting 3 (Motor cannot rotate)
The servo is ON, but the motor will not operate.
Table 6.3.3
Cause
What to do
Wrong parameter setting.
For setting all the basic parameters in all control modes, refer to chapter 5
「Table 5.2.4, Table 5.3.2, Table 5.4.2 and Table 5.5.2」.
Do not input correct host commands.
Check the command input from host control device. Confirm the input
command is correct or not according to the waveform input by pulse train
command (position) or analog speed command in HCX-SETUP. Check the
parameter, such as division and multiplication. Sometimes, the motor
rotates quite slowly.
The connection of user I/O connector is not
correct.
For correct connection, refer to 「Figure 5.2.1, Figure 5.2.2, Figure 5.2.3,
Figure 5.3.1, Figure5.4.1 and Figure 5.5.1」.
Command input is restricted.
Disconnect the HOLD and COM- of user I/O connector.
Torque command limit setting is not correct.
Set parameter No.147.0 and 148.0 correctly when using torque command
limit.
CCW/CW drive restriction input becomes
effective.
Set the parameter No.67.0 to 「0」 when not using CCW/CW drive
restriction input. CCWL, CWL and COM- of user I/O connector should be
closed when using CCW/CW drive restriction input.
■Troubleshooting 4 (Motor operation is not steady)
The motor operates unsteadily.
Table 6.3.4
Cause
What to do
FG and GND connection is wrong.
Connect FG and GND correctly.

95
Speed and position command is not steady.
Use [Waveform monitor] in HCX-SETUP to check the motor command
input. And check the contact of cables and connectors.
Misadjustment
Adjust the parameters.
The motor rotate without host command input.
Set the appropriate values for No.33.0 「Pulse train command - Input filter
selection」in position control mode.
Adjust parameter No.60.0 「Analog speed command - Fixed offset value」
in speed control mode.
Adjust parameter No.300.0 「Analog torque command Fixed offset value」
in torque control mode.
Command is interfered.
The shielded twisted-pair cable is used for I/O cable in a vulnerable
environment. So is the encoder cable. The encoder cable should be 20m
or less.
Position deviation occurs.
Set the appropriate values for No.33.0 「Pulse train command - Input filter
selection」in position control/pulse train command mode. Check whether
the pulse output of host control device (such as PLC) is beyond the limit
value. Check whether the product of ①No.33(Pulse command
input(position) and host control device output, ②No.65(Position
command) and No.67(Position feedback), ③No.67 and parameter
No.276.0/278.0(Encoder pulse output division and multiplication) is
consistent with the position feedback of host control device. If inconsistent,
it may be interfered. Then connect FG correctly and adjust parameter
No.33.0.
Please use shielded twisted-pair for I/O cable.
Deviation occurs when home position reset.
Check the command input of host control device. Observe the waveform of
pulse train command input(position) or analog speed command input in
HCX-SETUP to check whether the input command is correct or not. Check
whether to get the Z-phase correctly from the host control device. If the
Z-phase pulse amplitude is small, adjust No.276.0 and 278.0 「Encoder
output division and multiplication」to increase the pulse amplitude.
■Troubleshooting 5(Vibration and sound)
Vibration and sound occurs when the motor operates.
Table 6.3.5
Cause
What to do
Large gain
Adjust the gain.
The machine or devices loosen.
Check the installment of motor, reducer and coupling.
Interference occurs.
Check the cables’ length and shielding.
The high-voltage cable(motor power cable) should be isolated from the
signal cable (encoder cable).
Resonance occurs between motor and device.
Adjust position command smoothing filter at low-vibration; Adjust low-pass
filter or notch filter at high-vibration.
The drive and motor do not match.
Confirm the motor model code in HCX-SETUP [Communication setting]. If

96
the drive and motor do not match, clear the EEPROM parameter and
change the motor models.
Manual NO.
140500063A
Version
3.0
Date
June, 2016
 Loading...
Loading...