

Page 1

AR-B5800 User Manual
AR-B5800 Board
Intel® Core™2 LGA775 PROCESSOR
Networking Board
User Manual
Manual Rev.: 1.3
1
Page 2

AR-B5800 User Manual
2
Page 3

AR-B5800 User Manual
Copyright 2011
All Rights Reserved.
Manual’s first edition:
For the purpose of improving reliability, design and function, the information in this document is
subject to change without prior notice and does not represent a commitment on the part of the
manufacturer.
In no event will the manufacturer be liable for direct, indirect, special, incidental, or consequential
damages arising out of the use or inability to use the product or documentation, even if advised of
the possibility of such damages.
This document contains proprietary information protected by copyright. All rights are reserved. No
part of this Manual may be reproduced by any mechanical, electronic, or other means in any form
without prior written permission of the manufacturer.
Trademarks
AR-B5800 is a registered trademarks of Acrosser; IBM PC is a registered trademark of the
International Business Machines Corporation; Pentium is a registered trademark of Intel
Technologies Inc; Award is a registered trademark of Award Software International Inc; other
product names mentioned herein are used for identification purposes only and may be trademarks
and/or registered trademarks of their respective companies.
3
Page 4

AR-B5800 User Manual
Table of Contents
1 Introduction........................................................5
1.1 ........................................................................6 Specifications
1.2
.................................................................7 Package Contents
1.3
.......................................................................8 Block Diagram
2 H/W Information .................................................9
2.1 Locations (Top side) ..............................................................9
2.2 Connectors and Jumper Setting...........................................11
2.3 Connector and Jumper Setting ............................................13
3 BIos setting.......................................................17
3.1 Main Setup...........................................................................18
3.2 Advanced Chipset Setup .......................................................... 19
3.3 PnP/PCI Setup ...........................................................................
3.4 Peripherals Setup.......................................................................
3.5 PC Health Setup.........................................................................
3.6 Boot Setup ..................................................................................
3.7 Exit Setup ....................................................................................
3.8 BIOS Update...............................................................................
20
21
23
23
24
26
4 Software Installation and Programming Guide31
4.1 ..........................................................................31 Introduction
4.2
..................................................................33 File Descriptions
4.3
....................................................36 API List and Descriptions
4
Page 5

AR-B5800 User Manual
1 Introduction
AR-B5800 is designed for rack-mounted platform for networking appliance, e.g. VPN, SSL, UTM or
firewall. With Intel advanced Core 2 Quad / Duo / Pentium / Celeron CPU, AR-B5800 is a powerful
platform to satisfy different applications. By eight 10/100/1000Mbps LANs, the AR-B5800 is
sufficient for the small to middle size business security solution.
AR-B5800 can install 2 x HDD for RAID 0/1 redundancy. Customers don’t need to worry about
data lost due to HDD defected problem. BIOS, GPIO and Jumper can control LAN bypass feature.
It provides flexibility to access Internet by user setting. It also has standard PCIe x 8 slot.
Customers can purchase suitable add-on card to meet their appliance.
Key features:
1. Support Intel Core 2 Quad or Core 2 Duo or Pentium or Celeron CPU
2. Intel G41 + ICH7R Chipset to support RAID 0/1 redundancy
3. DDRIII DIMM x 2, up to 4GB memory
4. Intel 82574L 10/100/1000Mbps x 6 + 82541PI 10/100/1000Mbps x 2
5. Two pairs LAN ports support bypass feature (LAN 1/2 + LAN 3/4)
6. LAN bypass can be controlled by BIOS, GPIO and Jumper
7. CF socket, 2.5” HDD x 2, SATA II interface x 2
8. Console, VGA (pinhead), USB 2.0 x 4 (2 x connectors, 2 x pin head)
9. Support boot from LAN, console redirection
10. Support standard PCIe x 8 slot for feature expansion
5
Page 6

AR-B5800 User Manual
1.1 Specifications
CPU: a LGA775 socket for Intel Core2 Processors in the 775-Land LGA package.
DMA channels: 7.
Interrupt levels: 16 (24 APIC interrupts).
Chipset: Intel G41 express chipset 82G41 + 82801GR + W83627DHG-P.
Memory: provides two 240-pin DIMM sockets to support DDRIII 1066 non-ECC DIMM. The
memory capability can up to 2GB.
VGA Controller: G41 GMCH integrated.
Analog Display Interface: 10-pin box header, and resolution up to 2048x1536@75Hz.
Serial ATA Interface: supports Two SATA devices, and data transfer rates up to 300MB/s per
device.
Compact flash interface: supports TYPE-II compact flash card with UDMA supported.
USB2.0 interface: one stacked USB connector and two 10-pin pin header to support Six
USB2.0 compatible devices. All resettable fuses protected.
Ethernet interface: on-board six PCI express gigabit Ethernet controllers and two PCI gigabit Ethernet
controllers to support eight LAN ports. They provide a standard IEEE 802.3 Ethernet interface for
1000BASE-T, 100BASE-TX, and 10BASE-T applications (802.3, 802.3u, and 802.3ab,
respectively).
BYPASS function: supports by ports LAN1 & LAN2 , LAN3 & LAN4 software programmable.
PCIE X8 interface: One PCI Express x8 slot.
Serial ports (RS232): One high-speed 16550 compatible UARTs ports with 16-byte
send/receive FIFOs.
COM1: RJ45 connector.
LCM interface: a 7-pin pin header could be used to LCM for chassis’ control panel.
General Purpose Input/Output: 8-bit, 3.3V TTL level, bidirectional, and software
programmable GPIOs.
WATCHDOG: software programmable 1~255 second(s) / minute(s).
Power Consumption: +12V [5.3A], +5V [3.5A], +3.3V [1.8A], -12V [0.9A], +5Vsb [0.8A]
typically.
Test equipments list as below:
Main board: AR-B5800.
Processor: Intel Pentium Processor E6500 2.93GHz / FSB1066 / 2MB
L2 cache / 45nm.
Memory: one Kingston KVR1333D3N9/2G.
One 3.5” HDD
OS: Windows XP SP3.
6
Page 7

AR-B5800 User Manual
Processor was running at 100% loading.
Note: A proper power supply unit choice means that we should consider at least about
a.) Protection of overload, short-circuit, and other safeties.
b.) Summation of all devices’ power requirements.
c.) Thermal de-rating.
1.2 Package Contents
Check if the following items are included in the package.
In addition to this User's Manual, the AR-B5800 package includes the following items:
A quick setup manual.
One AR-B5800 networking board.
One Software utility CD.
One adaptable cable for COM1.
One D-SUB-15 adaptable cable for VGA.
One SATA cable.
One USB adaptable cable. (Optional) (ACROSSER’s P/N.190030779-G)
7
Page 8

1.3 Block Diagram
AR-B5800 User Manual
8
Page 9

AR-B5800 User Manual
2 H/W Information
This chapter describes the installation of AR-B5800. At first, it shows the Function diagram and the
layout of AR-B5800. It then describes the unpacking information which you should read carefully,
as well as the jumper/switch settings for the AR-B5800 configuration
2.1 Locations (Top side)
9
Page 10

RTC1
System RTC battery socket
PCIEXP1
PCI-Express X8 Slot
LGA775 CPU Socket
Intel GMCH 82G41
AR-B5800 User Manual
Intel ICH7R
DIMM1
240-Pin DDR3 Socket
DIMM2
240-Pin DDR3 Socket
10
Page 11

2.2 Connectors and Jumper Setting
2.2.1 Locations (Top side)
AR-B5800 User Manual
11
Page 12

AR-B5800 User Manual
LAN1
LAN1 RJ45 Connector
LAN2
LAN2 RJ45 Connector
LAN3
LAN3 RJ45 Connector
LAN4
LAN4 RJ45 Connector.
LAN5
LAN5 RJ45 Connector
LAN6
LAN6 RJ45 Connector
LAN7
LAN7 RJ45 Connector.
LAN8
LAN8 RJ45 Connector.
USB1
Two USB ports (USB0, USB1)
connector.
COM1
RS232 Serial Port COM1.(RJ45)
LED1
4 in 1 LED for LAN Bypass, Power &
HDD LED.
RST2
System Reset Switch.
FP_USB2
Internal USB4, USB5 connector.
FP_USB1
Internal USB2, USB3 connector.
LCM1
Pin Header for LCM
GP1
GPIO Header.
JP2
GPIO Header Voltage Selection.
CF1
CF CARD SOCKET.
CPLD1
For CPLD Firmware Update
ATXP WR1
ATX Power Supply input connector..
SATA2
SATA device connector #2.
SATA1
SATA device connector #1.
VGA1
VGA connecter (2x5 Pin Header)
ATX12V1
ATX12V Power Supply input
Connector.
SYSFAN3
System FAN Connector.
CPUFAN1
CPU FAN Connector.
SYSFAN2
System FAN Connector.
SYSFAN1
System FAN Connector.
JP1
For LAN1/LAN2 Bypass Function
Select.
RTC1
CR2032 Battery Hold Connector.
CCMOS1
CMOS Memory Clearing Header
JP4
For LAN3/LAN4 Bypass Function
Select.
12
Page 13
2.3 Connector and Jumper Setting
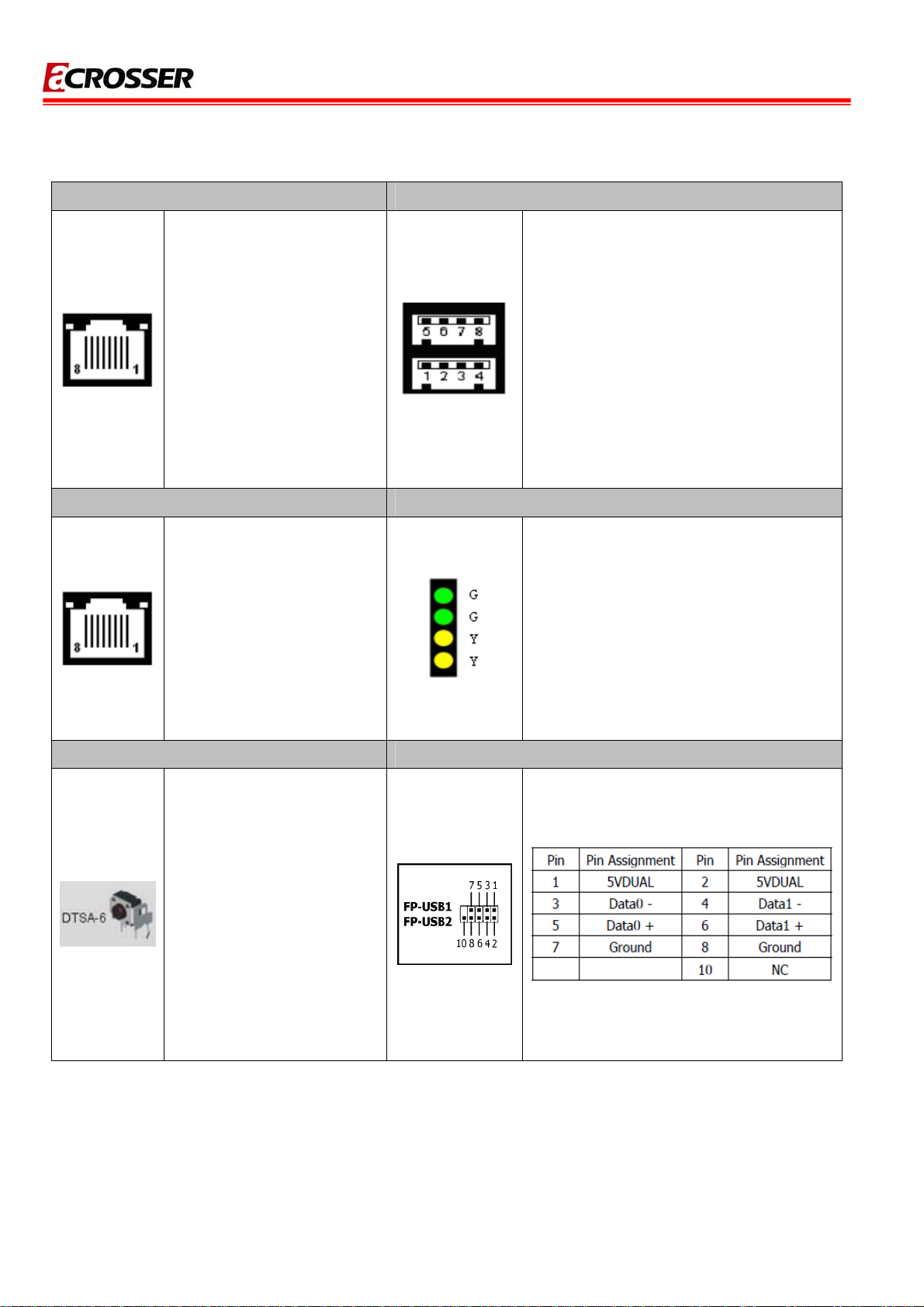
1. LAN1 ~ LAN8 RJ45 Connector 9. USB1 Connector
AR-B5800 User Manual
External USB Connector
LAN RJ45 Connector
Connects to Local Area
Network.
Connects to USB devices such as scanner,
digital speakers, monitor
, mouse, keyboard, hub, digital camera,
10. COM1 ( RJ45 Connector ) 11. LED 1
Green1: Power ON LED.
COM Port RJ45 Connector
Green2: HDD LED
Yellow1: LAN3&LAN4 Bypass LED.
Yellow2: LAN1&LAN2 Bypass LED.
12. RST2 13,14. FP_USB1 & FP_USB2
joystick etc.
Push this button to reset
the system.
13
Page 14

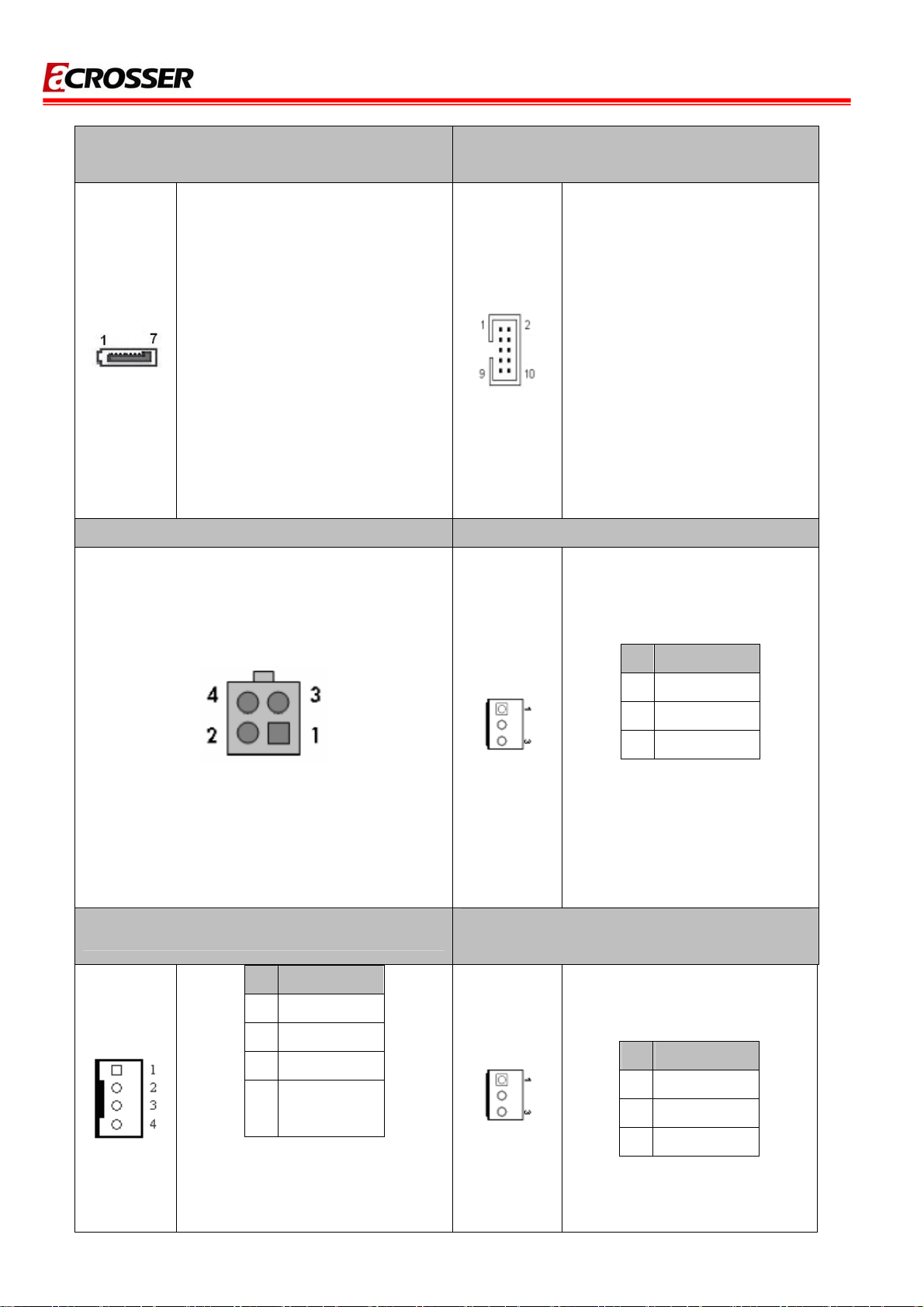
15. LCM1 ( for LCM use ) 16. GP1 ( GPIO Header )
AR-B5800 User Manual
Pin SIGNAL
1 Pull-High to VCC5
2 VCC5
3 SOUTB
4 SINB
5 RTSB#
6 CTSB#
7 GND
1
3
5
7
9
AL PIN SIGNAL PIN SIGN
VCC_GP D
GP31
GP32
2
GP30
4
6
8
10
17. JP2 GPIO Header Voltage Selection 18. CF1 ( CF CARD Socket )
GN
GP34
GP35
GP36
GP3
7 GP33
Pins 1 and 2 shorted
(Default): VCC 5
Pins 2 and 3 shorted:
VCC 3
19. CPLD1 ( for CPLD Firmware Update)
Pin SIGNAL
1 3VDUAL
2 G_TDO
3 G_TDI
4 NC
5 NC
6 G_TMS
7 GND
8 G_TCK
20. ATXPWR1 ( ATX Power Supply Input )
14
Page 15
AR-B5800 User Manual
21,22. SATA2, SATA1 (SATA device
23. VGA1 (2x5pin 2mm Wafer).
connector #2 and #1).
To connect SATA device:
1.Attach either end of the signal cable
to the SATA connector on
motherboard.
Attach the other end to the SATA
device.
2. Attach the SATA power cable to the
VGA Wafer CONNECTOR .
SATA device and connect the other
end
from the power supply.
24. ATX12V1. (ATX12V Power Input) 25. SYSFAN3 (System FAN connector 3).
26. CPUFAN1 (CPU FAN connector).
PIN SIGNAL
1
2
3
4
ON/OFF controlled by CPU
GND
+12V
Fan speed data
CPU FAN PWM
Control
PIN SIGNAL
1
2
3
GND
+12V
Fan speed data
27. SYS_FAN2 (System FAN connector
2).
PIN SIGNAL
1
2
3
GND
+12V
Fan speed data
temperature setting of BIOS.
15
Page 16
AR-B5800 User Manual
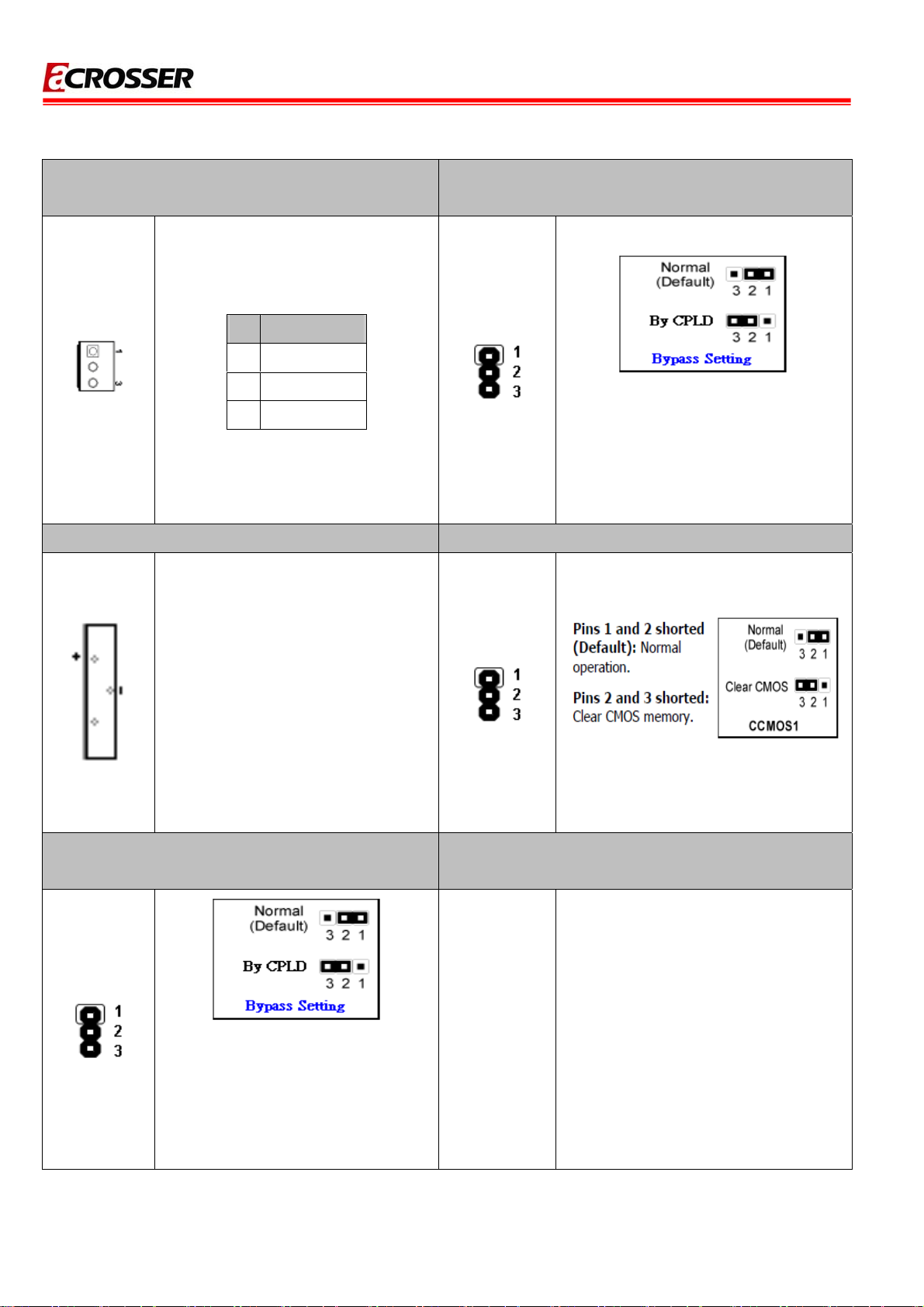
28. SYS_FAN1 (System FAN connector 1). 29. JP1 (For LAN1/LAN2 Bypass Function
Select.).
PIN SIGNAL
1
2
3
GND
+12V
Fan speed data
Pins 1 and 2 shorted
(Default): Forced Normal.
Pins 2 and 3 shorted:
Controlled By CPLD.
Otherwise : Forced Bypass
30. RTC1 31. CCMOS1.
CMOS Backup Battery:
An onboard battery saves the CMOS memory to
keep the BIOS information stays on even after
disconnected your system with power source.
Nevertheless, this backup battery exhausts after
some five years.
Once the error message like “CMOS BATTERY
HAS FAILED” or “CMOS checksum error”
displays on monitor, this backup battery is no
longer functional and has to be renewed
32. JP4 (For LAN3/LAN4 Bypass Function
Select.).
Pins 1 and 2 shorted
(Default): Forced Normal.
Pins 2 and 3 shorted:
Controlled By CPLD.
Otherwise : Forced Bypass
16
Page 17

AR-B5800 User Manual
3 BIos setting
This chapter describes the BIOS menu displays and explains how to perform common tasks
needed to get the system up and running. It also gives detailed explanation of the elements found
in each of the BIOS menus. The following topics are covered:
Main Setup
Advanced Chipset Setup
Peripherals Setup
PnP/PCI Setup
PC Health Setup
Boot Setup
Exit Setup
17
Page 18

AR-B5800 User Manual
3.1 Main Setup
Once you enter the Award BIOS™ CMOS Setup Utility, the Main Menu will appear on the screen.
Use the arrow keys to highlight the item and then use the <Pg Up> <Pg Dn> keys to select the
desired value in each item.
Note: The control keys are listed at the bottom of the menu. If you need any help with the item fields, you
can press the <F1> key, and the relevant information will be displayed.
Option Choice Description
Set the system date. Note that the ‘Day’
Date Setup
Time Setup
IDE Channel 0
Master
N/A
N/A Set the system time.
N/A
automatically changes when you set the
date.
The onboard CF connectors provide one
channel for connecting one CF CARD Only
the BIOS will auto-detect the CF type.
18
Page 19

AR-B5800 User Manual
SATA Channel
The onboard SATA connectors provide 1
N/A
channel for connecting one SATA hard disks,
1/2
the BIOS will auto-detect the SATA type.
Halt On
All Errors,
No Errors,
All but keyboard.
Select the situation in which you want the
BIOS to stop the POST process and notify
you.
3.2 Advanced Chipset Setup
This section allows you to configure and improve your system and follows you to set up some
system features according to your preference.
Option Choice Description
Quick Power On Self
Test
This category speeds up Power On Self Test (POST) after you
Enabled
have powered up the computer. If it is set to Enable, BIOS will
Disabled
shorten or skip some check items during POST.
19
Page 20

AR-B5800 User Manual
Full Screen Logo
Show
APIC Mode
Pre-allocated
Memory Size
DVMT Mode
Console Redirection
Baud Rate
LAN Bypass
Function
Enabled
Disabled
Enabled
Disabled
32Mb
64Mb
128Mb
Enabled
Disabled
Enabled
Disabled
115200(Max)
Enabled
Disabled
Select Enabled to show the OEM full screen logo if you have
add-in BIOS.
Advanced Programmable Interrupt Controller.This item
[Enabled] for more system INTerrupts that AR-B5800
required.
This Item is for setting the Frame Buffer (Share system memory
as display memory).
Dynamic Video Memory Technology.
[Enabled] for optimizing amount of memory is located for
balanced graphics and system performance.
[Enabled] for user who w ant to remote control the system via
serial port.
The baud rate of remote control machine should the same as
the system for communication.
For user Enable/Disable LAN Bypass Function !!.
3.3 PnP/PCI Setup
The option configures the PCI bus system. All PCI bus system on the system use INT#, thus all
installed PCI cards must be set to this value.
20
Page 21
AR-B5800 User Manual
Option Choice Description
Normally, you leave this field Disabled. Select Enabled to
Reset Configuration
Data
Resources
Controlled By
IRQ Resources
Enabled
Disabled
Auto(ESCD)
Manual
N/A
3.4 Peripherals Setup
reset Extended System Configuration Data (ESCD) when you
exit Setup. If you have installed a new add-on and the system
reconfiguration has caused such a serious conflict, then the
operating system cannot boot.
The Award Plug and Play BIOS has the capacity to
automatically configure all of the boot and Plug and Play
compatible devices. However, this capability means absolutely
nothing unless you are using a Plug and Play operating
system such as Windows 95. If you set this field to “manual,”
then you may choose specific resources by going into each of
the submenus.
When resources are controlled manually, assign a type to
each system interrupt, depending on the type of the device
that uses the interrupt
This option controls the configuration of the board’s chipset. Control keys for this screen are the
same as for the previous screen.
21
Page 22

AR-B5800 User Manual
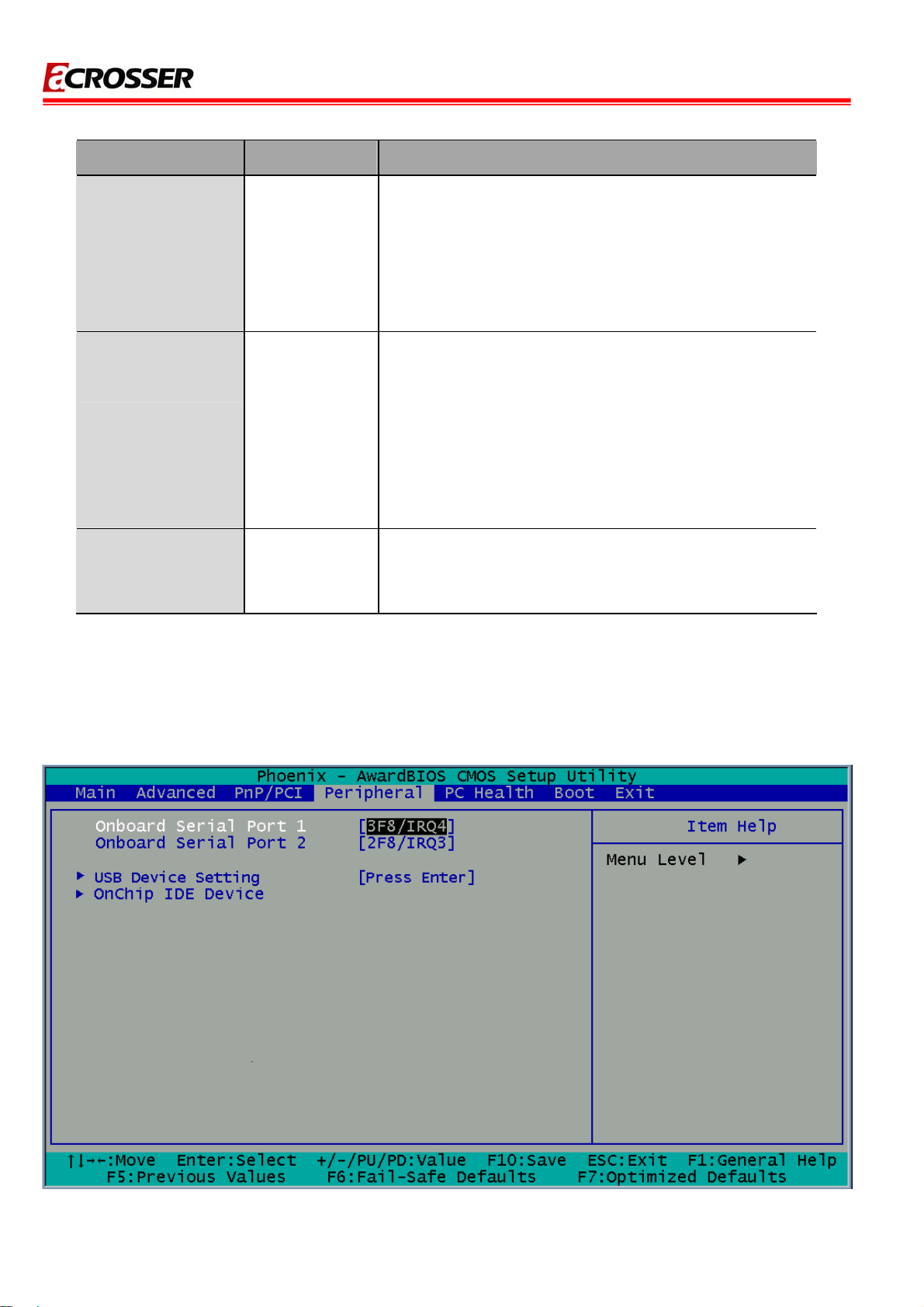
Option Choice Description
Onboard Serial Port 1
Onboard Serial Port 2
USB Device Setting
USB 1.0 Controller
USB 2.0 Controller
Serial Port 1: 3F8 / IRQ4
Serial Port 2: 2F8 / IRQ3
Enter to Select USB Device
Setting
Enabled
Disabled
Enabled
Disabled
Select an address and the corresponding
interrupt for each serial port.
Select Enabled if your system contains
a Universal Serial Bus (USB) 1.0
controller and you have USB
peripherals
Select Enabled if your system contains
a Universal Serial Bus (USB) 2.0
controller and you have USB
peripherals
Auto decide USB device operation
mode.
[High Speed]: If USB device was high
USB Operation Mode
USB Keyboard
Function
USB Storage Function
On chip IDE DEVICE
Full/Low Speed
High Speed
Enabled
Disabled
Enabled
Disabled
Enabled
Disabled
speed device, then it operated on high
speed mode. If USB device was full/Low
speed device, then it operated on
full/low speed mode.
[Full/Low Speed]: All of USB device
operated on full/low speed mode.
[Enable] or [Disable] Legacy Support of
USB Keyboard
[Enable] or [Disable] Legacy Support of
USB Storage
The integrated peripheral controller
contains an IDE interface with support for
two IDE channels. Select Enabled to
activate each channel separately.
22
Page 23
AR-B5800 User Manual
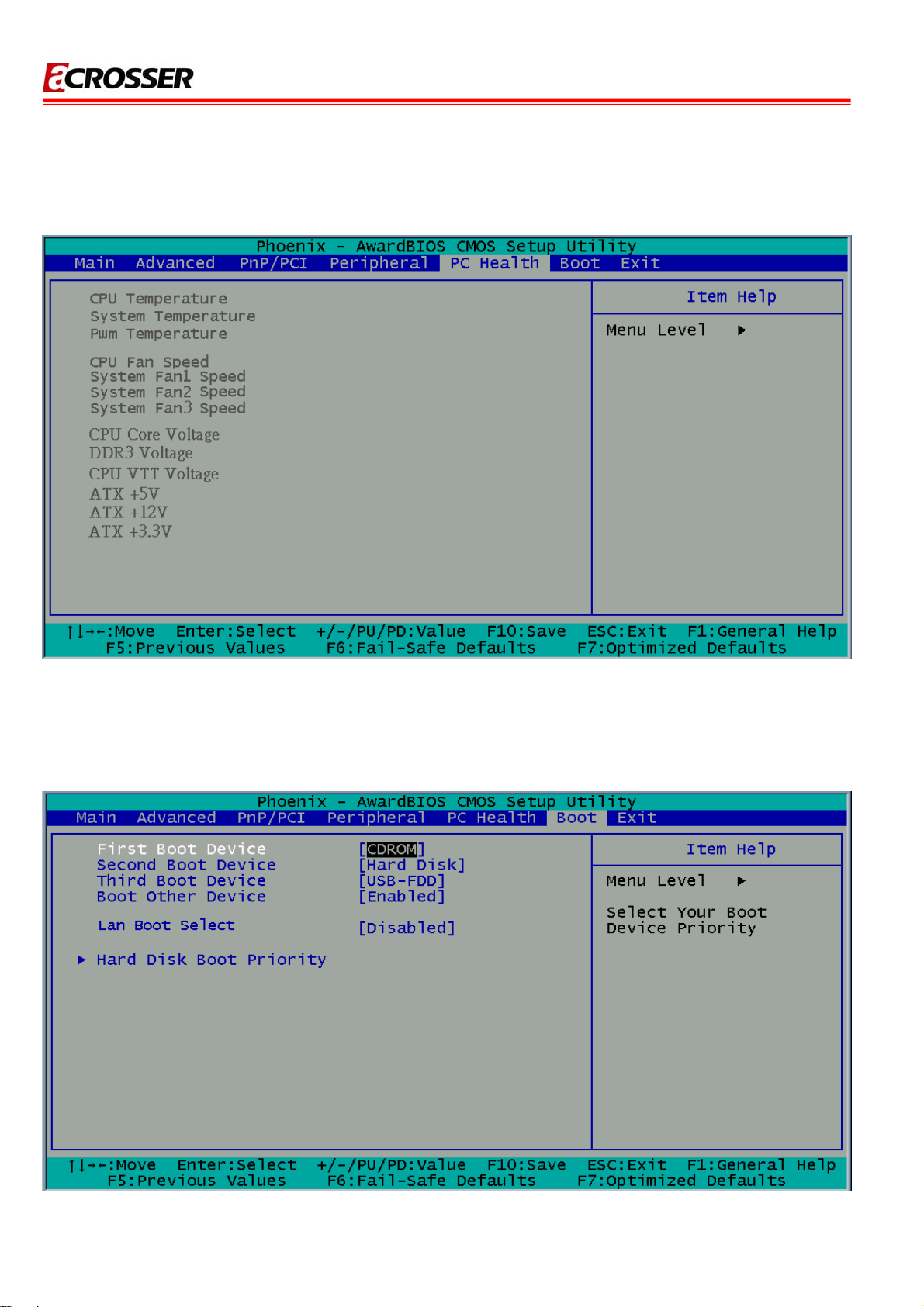
3.5 PC Health Setup
This section shows the parameters in determining the PC Health Status. These parameters include
temperatures, fan speeds, and voltages.
3.6 Boot Setup
This section is used to exit the BIOS main menu. After making your changes, you can either save
them or exit the BIOS menu and without saving the new values.
23
Page 24

AR-B5800 User Manual
Option Choice Description
Hard Disk
First / Second / Third
Boot Device/Other Boot
Device
LAN Boot Select
Hard Disk Boot Priority
CDROM
USB-FDD
USB-CDROM
LAN
Disabled
Enabled
Disabled
N/A
3.7 Exit Setup
This section is used to configure exit mode.
The BIOS attempts to load the operating
system from the devices in the sequence
selected in these items.
These fields allow the system to search
for an OS from LAN
These fields set the Boot Priority for each
Hard Disk
24
Page 25

AR-B5800 User Manual
Option Choice Description
Press “Y” to store the selections made in
Save & Exit Setup
Load Optimized Defaults
Exit Without Saving
Pressing <Enter> on this item
for confirmation:
Save to CMOS and EXIT
(Y/N)? Y
When you press <Enter> on
this item you get a
confirmation dialog box with a
message like this:
Load Optimized Defaults
(Y/N)? N
Pressing <Enter> on this item
for confirmation:
the menus in CMOS – a special section of
memory that stays on after you turn your
system off. The next time you boot your
computer, the BIOS configures your system
according to the Setup selections stored in
CMOS. After saving the values the system
is restarted again
Press ‘Y’ to load the default values that are
factory-set for optimal-performance system
operations.
This allows you to exit Setup without storing
any changes in CMOS. The previous
selections remain in effect. This shall exit
Set Password
Quit without saving (Y/N)? Y
Pressing <Enter> on this item
for confirmation:
ENTER PASSWORD:
the Setup utility and restart your computer.
When a password has been enabled, you
will be prompted to enter your password
every time you try to enter Setup. This
prevents unauthorized persons from
changing any part of your system
configuration.
Type the password, up to eight characters
in length, and press <Enter>. The password
typed now will clear any previous password
from the CMOS memory. You will be asked
to confirm the password. Type the
password again and press <Enter>. You
may also press <Esc> to abort the selection
and not enter a password.
To disable a password, just press <Enter>
25
Page 26

AR-B5800 User Manual
when you are prompted to enter the
password. A message will confirm that the
password will be disabled. Once the
password is disabled, the system will boot
and you can enter Setup freely.
3.8 BIOS Update
The BIOS program instructions are contained within computer chips called FLASH ROMs that
are located on your system board. The chips can be electronically reprogrammed, allowing you
to update your BIOS firmware without removing and installing chips.
The AR-B5800 provides the FLASH BIOS update function for you to easily to update BIOS.
Please follow these operating steps to update BIOS:
26
Page 27
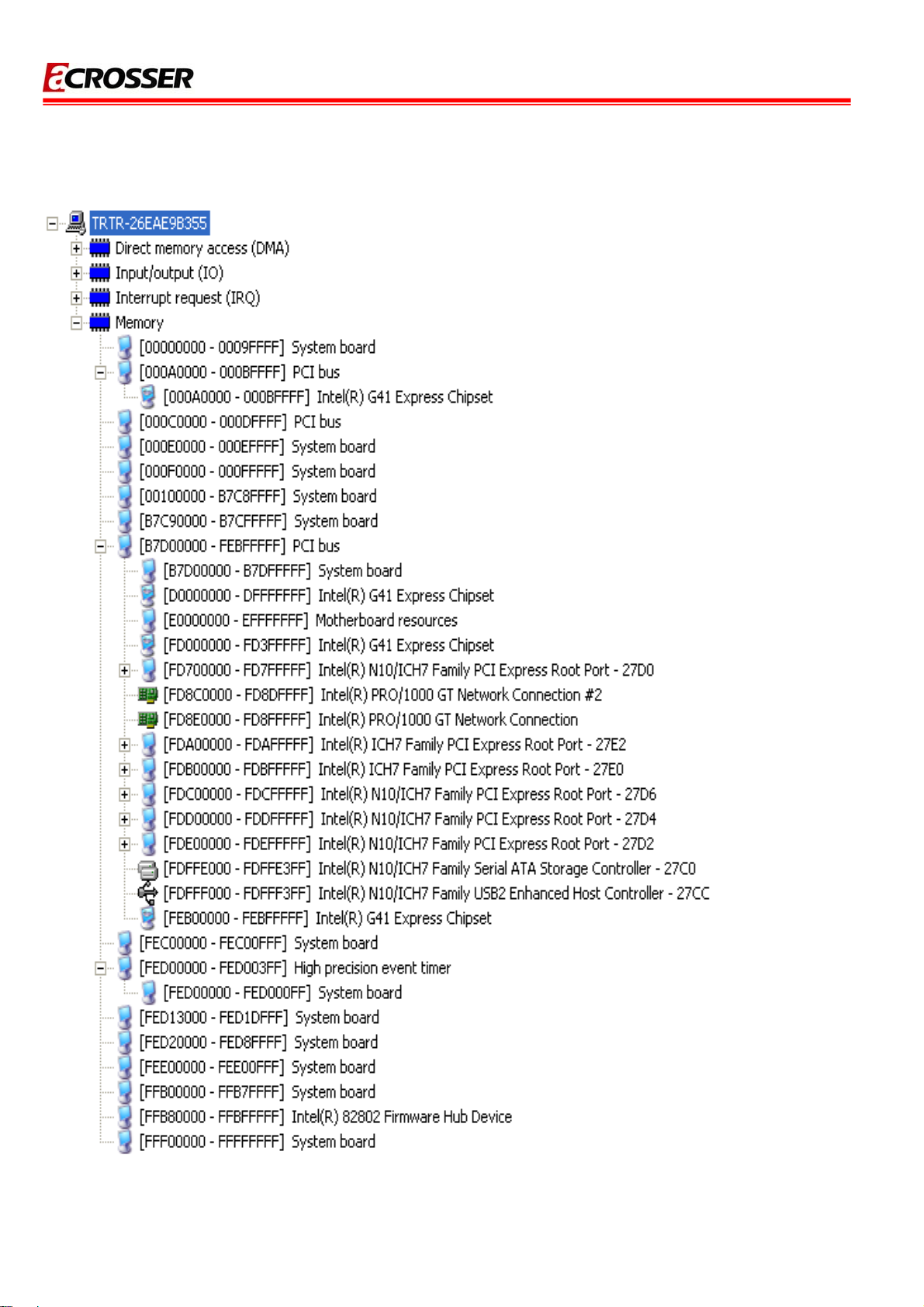
APPENDIX A. MEMORY MAP
AR-B5800 User Manual
27
Page 28
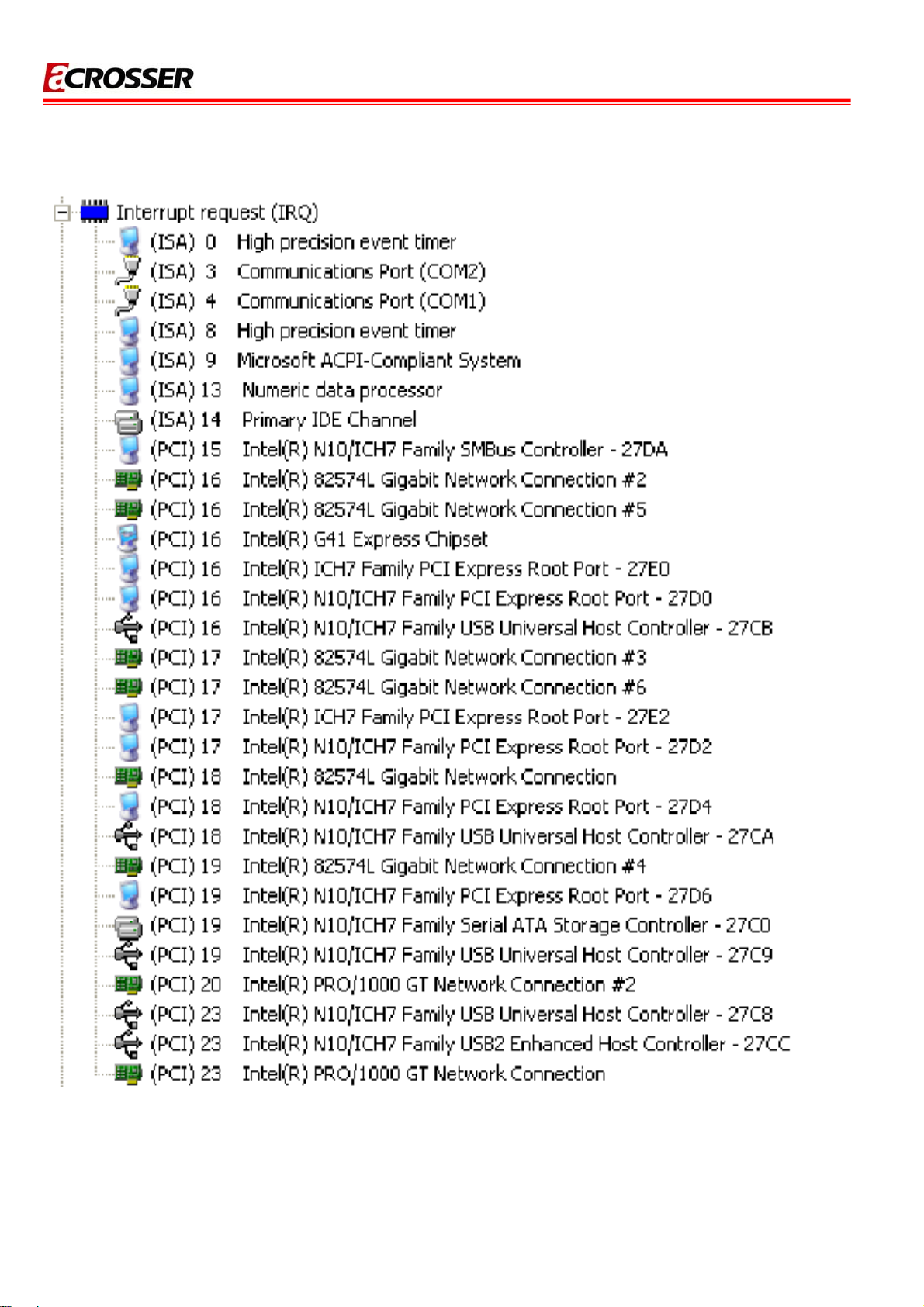
APPEXDIX B. IRQ MAP
AR-B5800 User Manual
28
Page 29

APPENDIX C. I/O PORT MAP
AR-B5800 User Manual
29
Page 30

AR-B5800 User Manual
30
Page 31

AR-B5800 User Manual
Software Installation and
4
Programming Guide
4.1 Introduction
LCD Control Module
Overview
The LCM (short for LCD Control Module) APIs provide interfaces to control the module. By invoking
these APIs, programmers can implement the applications which have the functions listed below:
1. Clear LCD screen.
2. Turn on or off the cursor on the screen.
3. Move the cursor on the screen.
4. Turn on or off the text on the screen.
5. Get the identification of the pressed key of the LCM.
6. Show the text on the screen.
GPIO and Watchdog
Overview
AR-B5800 provides both a GPIO interface and a Watchdog timer. Users can use the GPIO and
Watchdog APIs to configure and to access the GPIO interface and the Watchdog timer. The GPIO has eight
ports. Users can configure each pin as input or output respectively. The Watchdog timer can be set to 1~255
seconds. Setting the timer to zero disables the timer. The remaining seconds of the timer to reboot can be
read from the timer.
In this GPIO and Watchdog package, we provides:
1. API source code.
2. GPIO and Watchdog test utility and the utility source code.
Here is the GPIO Mapping Table:
Pin Name on SIO I/O Direction
GP30
GP31
Configurable GPIO0
Configurable GPIO1
Signal Name
in Source Code
GP32
GP33
Configurable GPIO2
Configurable GPIO3
31
Page 32
AR-B5800 User Manual
GP34
GP35
GP36
GP37
Configurable GPIO4
Configurable GPIO5
Configurable GPIO6
Configurable GPIO7
In the GPIO APIs, we use the signal names ‘GPIO0’, ‘GPIO1’…etc. to identify the GPIO ports.
LAN Bypass Subsystem
Overview
Two pairs of LAN ports on AR-B5800 implement the bypass function. Users can invoke the LAN
Bypass APIs to control the bypass states of the LAN ports and set up the LAN Bypass Watchdog timer ( this
watchdog timer is different from the system watchdog timer mentioned in the previous paragraph ).
AR-B5800 Library (Window platform only)
The released code for Windows platform includes a folder called ‘AR-B5800’. In this folder, there are
header files and source codes of all the APIs of LCM module, GPIO, Watchdog, and LAN Bypass functions.
The source codes in this folder generate the API library ‘AR-B5800.lib’ and ‘AR-B5800.dll’. Users who
want to invoke the APIs can include the ‘AR-B5800.h’ in their application source code and compile their
application with the library ‘AR-B5800.lib’ or ‘AR-B5800.dll’.
Besides AR-B5800 libraries, there are WinIo32.sys, WinIo32.lib, and WinIo32.dll in this directory.
These files are indispensable for LAN Bypass application, GPIO and Watchdog application. Please put these
three files with LAN Bypass application, GPIO and Watchdog application in the same folder. The APIs
invoke WinIo32.lib, WinIo32.dll, and WinIo32.sys implicitly.
32
Page 33

AR-B5800 User Manual
4.2 File Descriptions
LCD Control Module
On Linux platform:
1. lcmdemo.c
This file is the source code of the demo program. This program displays the user interface, processes
user’s input, and invokes LCM APIs to demonstrates the functions of LCM.
2. lcm.c
This file includes the hardware independent implementation of LCM APIs. All the APIs in this file
invoke the hardware dependent functions ‘InitSerialPort( )’, ‘WriteSerial( )’, ‘ReadSerial( )’ and
‘CloseSerialPort( )’ for accessing the serial port
3. lcm.h
This file includes the declarations and macro definitions needed by lcm.c.
4. serialport.c
This file includes the hardware dependent implementation of ‘InitSerialPort( )’, ‘WriteSerial( )’,
‘ReadSerial( )’ and ‘CloseSerialPort( )’ for accessing the serial port.
5. serialport.h
This file includes the declarations and macro definitions needed by serialport.c.
6. Makefile
This is the instruction script for GNU make system.
On Window platform:
1. LCM.cpp
The source code of the LCM demo program.
2. AR-B5800.h
The header of the APIs.
3. AR-B5800.lib and AR-B5800.dll
The API libraries.
GPIO and Watchdog
On Linux platform:
33
Page 34

1. sio_acce.c
The source code of the Watchdog and GPIO APIs for accessing the SuperIO.
2. sio_acce.h
This file includes the declarations of the APIs and macro definitions.
3. main.c
The source code of the utility.
4. Makefile
On Windows platform:
1. GPIO_Watchdog.cpp
GPIO and Watchdog demo program source code.
AR-B5800 User Manual
2. AR-B5800.h
The header file of the APIs.
3. AR-B5800.lib and AR-B5800.dll
The API libiaries.
LAN Bypass Subsystem
On Linux platform:
1. bypass.c
The source code of the APIs for setting up the bypass state.
2. bypass.h
This file includes the declarations of the APIs and macro definitions.
3. main.c
The source code of the utility.
4. Makefile
On Windows platform:
34
Page 35

1. LAN_Bypass.cpp
LAN_Bypass demo program source code.
2. AR-B5800.h
The header file of the APIs.
3. AR-B5800.lib and AR-B5800.dll
The API libiaries.
AR-B5800 User Manual
35
Page 36

4.3 API List and Descriptions
Type Definitions
Typedef char i8;
Typedef unsigned char u8;
Typedef short i16;
Typedef unsigned short u16;
Typedef unsigned long u32;
Typedef int i32;
LCD Control Module
AR-B5800 User Manual
1. i32 clrscrLcm
Description: Clear the screen of the LCM.
Return value: 0 after the screen is cleared.
2. i32 cursorLcm( bool mode )
Description: According to the argument ‘mode’, show the cursor on the LCM screen or eliminate the
cursor on the LCM screen. The position of the cursor is unchanged.
mode = true, show the cursor.
mode = false, eliminate the cursor.
Return value: 0 after the cursor has been shown or eliminated.
3. i32 cursorActionLcm( i32 type)
Description: According to the argument ‘type’, move the cursor to the indicated position. The displayed
text is not altered.
type = HOME, move the cursor to row 0, column 0.
type = MOVERIGHT, move the cursor to the column which is to the right of its original position if the
original column < 15.
( void )
type = MOVELEFT, move the cursor to the column which is to the left of its original position if the
original column > 0.
type = MOVEBACK, move the cursor to the column which is to the left of its original position and
delete the character at the new position if the original
column > 0.
Return value: 0 after the cursor is moved.
4. i32 displayLcm( bool mode )
Description: Show the text on the LCM screen or eliminate the text on the LCM screen. The content of
36
Page 37

the text is not altered.
mode = true, show the text.
mode = false, eliminate the text.
Return value: 0 after the text has been shown or eliminated.
5. i32 getKeyLcm( void )
Description: Scan the LCM and return the identification of the pressed direction key.
Return value: ‘UP’ if the ‘up’ direction key is pressed.
‘RIGHT’ if the ‘right’ direction key is pressed.
‘LEFT’ if the ‘left’ direction key is pressed.
‘DOWN’ if the ‘down’ direction key is pressed.
AR-B5800 User Manual
‘NONE’ if none of the keys is pressed.
6. i32 getPositionLcm( i32 *row, i32 *column )
Description: Get the position of the cursor and write the coordinate to the memory pointed at by
arguments ‘row’ and ‘column’.
Return value: 0 if the request for the coordinate has been served.
7. i32 setPositionLcm( i32 row, i32 column )
Description: Set the position of the cursor according to the arguments ‘row’ and ‘column’.
Return value: 0 after the position has been set.
-1 if the argument ‘row’ or ‘column’ meets any of the following
conditions:
(1) row is not 0.
(2) row is not 1.
(3) column is less than 0.
(4) column is greater than 15.
8. i32 showLcm( i32 length, u8 *info )
Description: Start from the current position of the cursor; print the text pointed at by ‘info’ to the LCM
screen. The number of characters to be printed is at most ‘length’. If the remaining columns available for
printing the text is less than ‘length’, the number of the characters to be printed is:
16 – ( column number of the current position of the cursor ).
Return value: 0 after the text is printed.
37
Page 38

AR-B5800 User Manual
GPIO and Watchdog
GPIO
1. Syntax:
i32 setChDir( u8 val )
Description: Set the direction (Input/Output) of GPIO ports according to the parameter ‘val’.
Parameters: The parameter ‘val’ is an unsigned character. Each bit of *val corresponds to a GPIO port.
Bit 0 corresponds to GPIO0. Bit 1 corresponds to GPIO1. Bit 2 corresponds to GPIO2, and so on.
Setting a bit of ‘val’ as 0 configures the corresponding port as Output. Setting a bit of ‘val’ as 1
configures the corresponding port as Input.
Return Value: If the function gets the configuration successfully, it returns 0. If any error, it returns –1.
2. Syntax:
i32 getChDir( u8 *val )
Description: Get the direction (Input/Output) of GPIO ports and put the configuration at *val.
Parameters: The parameter ‘val’ points to an unsigned character. Each bit of *val corresponds to a
GPIO port. Bit 0 corresponds to GPIO0. Bit 1 corresponds to GPIO1. Bit 2 corresponds to GPIO2, and
so on. A ‘0’ bit at *val indicates the corresponding port is an Output port. A ‘1’ bit at *val indicates the
corresponding port is an Input port.
Return Value: If the function gets the configuration successfully, it returns 0. If any error, it returns –1.
3. Syntax:
i32 getChLevel( u8 *val )
Description: Get the status value of GPIO ports 0~7 and put the value at *val.
Parameters: The parameter ‘val’ points to an unsigned character. If a GPIO port is configured as an
Output port, the bit at *val which corresponds to this port indicates this port is outputting a ‘1’ or ‘0’. If
38
Page 39

AR-B5800 User Manual
a GPIO port is configured as an Input port, the corresponding bit at *val is always ‘1’.
Return Value: If the function gets the values successfully, it returns 0. If any error, it returns –1.
4. Syntax:
i32 setChLevel( u8 val )
Description: Set the status bits of GPIO Output ports according to the variable ‘val’. The status bits at
the ports which are configured as input will not be affected.
Parameters: The parameter ‘val’ is an unsigned character. If a GPIO port is configured as an Output
port, a ‘1’ bit at ‘val’ directs the corresponding port to output a ‘1’. A ‘0’ bit directs this port to output a
‘0’. If a GPIO ports is configured as an Input port, the setting to these input port is ignored.
Return Value: If the function sets the values successfully, it returns 0. If any error, it returns –1.
Watchdog
1. Syntax:
u8 getWtdTimer(void)
Description: This function read the value of the watchdog time counter and return it to the caller.
Parameters: None.
Return Value: This function return the value of the time counter and return it to the caller as an
unsigned integer.
2. Syntax:
void setWtdTimer( u8 val )
Description: This function sets the watchdog timer register to the value ‘val’ and starts to count down.
The value could be 0 ~ 255. The unit is second. Setting the timer register to 0 disables the watchdog
function and stops the countdown.
Parameters: The parameter ‘val’ is the value to set to watchdog timer register. The range is 0 ~ 255.
Return Value: None.
39
Page 40

AR-B5800 User Manual
LAN Bypass Subsystem
1. void enableWdt(void)
Enable Watchdog Timer. (This timer is different from the System Watchdog timer, which is configured
by the API described in 6.2).
2. void disableWdt(void)
Disable Watchdog Timer.
3. void reloadWdt(void)
Reload Watchdog Timer.
4. void forceNormal(void)
Force the port to become normal state.
5. void forceBypass(void)
Force the port to become bypass state.
6. void setWdt4(void)
Set the watchdog timer to 4 seconds.
7. void setWdt8(void)
Set the watchdog timer to 8 seconds.
8. void setWdt16(void)
Set the watchdog timer to 16 seconds.
9. void setWdt32(void)
Set the watchdog timer to 32 seconds.
40
 Loading...
Loading...