

Page 1

Speedster22i SerDes
User Guide
UG028 (v2.1) – July 1, 2014
UG028, July 1, 2014
1
Page 2
Table of Contents
List of Figures .................................................................................................................................... 5
List of Tables ..................................................................................................................................... 6
Overview ............................................................................................................ 7
Physical Media Attachment (PMA) ..................................................................................................... 7
Clocking ............................................................................................................................................. 8
Physical Coding Sublayer (PCS)........................................................................................................ 8
Debug and Test ................................................................................................................................. 8
Major standards supported ................................................................................................................ 9
SerDes Placement ........................................................................................................................... 11
SerDes Architecture Overview ......................................................................................................... 12
Physical Media Attachment (PMA) ................................................................. 13
1. Common .................................................................................................................................. 13
2. Receiver (RX)/Transmitter (TX) ................................................................................................ 14
3. Digital PMA (DPMA) ................................................................................................................. 14
PCS Blocks in the Transmitter ( TX ) ............................................................... 16
PCS Self Test Logic ......................................................................................................................... 16
Polarity bit reversal (PBR) #0 and #1 ............................................................................................... 16
Polarity and Bit Inversion – 10/20 bit Operation ............................................................................................. 17
Polarity and Bit Inversion – 8/16 bit Operation ............................................................................................... 18
Interface Encapsulation ................................................................................................................... 20
8b/10b Encoder ............................................................................................................................... 20
Symbols and Comma Character ..................................................................................................................... 20
Running Disparity ............................................................................................................................ 20
PCS Blocks in the Receiver (RX) .................................................................... 22
Transition Density Checker (TDC) ................................................................................................... 22
Polarity Bit Reversal (PB R) .............................................................................................................. 23
Symbol Alignment ............................................................................................................................ 23
Modes of Operation ........................................................................................................................................ 24
Deskew FIFO ................................................................................................................................... 25
Functional Description .................................................................................................................................... 26
Lane-to-Lane Deskew Modes of Operation ...................................................................................... 26
2 UG028, July 1, 2014
Page 3

The deskew module can work in three modes: .............................................................................................. 26
Standards Supported by Deskew Module ...................................................................................................... 27
Elastic FIFO (Elastic Buffer) ............................................................................................................. 27
EFIFO Standards and Skip Characters .......................................................................................................... 28
EFIFO Operation ............................................................................................................................................. 29
Overflow/Underflow ......................................................................................................................................... 31
8b/10b Decoder ............................................................................................................................... 31
Bit Slider .......................................................................................................................................... 31
Interface Encapsulation ................................................................................................................... 32
PCS Self Test Checker .................................................................................................................... 32
PCS Interface ................................................................................................... 33
Gigabit Ethernet Interface ................................................................................................................ 33
XAUI ................................................................................................................................................ 34
PIPE Interface .................................................................................................................................. 34
Clocking ........................................................................................................... 36
Debug and Test ............................................................................................... 38
Loopback Modes ............................................................................................................................. 38
PMA loopback modes: .................................................................................................................................... 39
PCS loopback modes: .................................................................................................................................... 39
PMA Test Pattern Generator ............................................................................................................ 40
PMA Test Pattern Checker .............................................................................................................. 40
PCS Test Pattern Generator ............................................................................................................ 40
PRBS Generator .............................................................................................................................. 40
PCS Test Pattern Checker ............................................................................................................... 41
Latency............................................................................................................. 42
PMA Latency ................................................................................................................................... 42
PCS Latency .................................................................................................................................... 42
Configurations Support ed .............................................................................. 45
Design Flow: Creating a SerDes Design ........................................................ 49
Generating SerDes Wrapper using ACE GUI ................................................................................... 49
Single-Lane Serdes Wrapper ........................................................................................................... 50
Overview Section: ........................................................................................................................................... 53
Section on PMA Settings: ............................................................................................................................... 57
RX PMA Equalization ...................................................................................................................................... 59
RX PMA PLL ................................................................................................................................................... 60
TX PMA Driver ................................................................................................................................................ 62
TX PMA PLL ................................................................................................................................................... 62
Section on PCS Settings: ................................................................................................................................ 63
UG028, July 1, 2014
3
Page 4

RX PCS Settings ............................................................................................................................................. 64
RX PCS Symbol Alignment ............................................................................................................................. 66
TX PCS Settings ............................................................................................................................................. 68
Section on Manually Overriding PMA/PCS Register Values: ......................................................................... 69
Generation of Wrapper Files: .......................................................................................................................... 70
Files Generated by ACE-GUI ........................................................................................................... 71
Integration of SerDes Wrapper in a Design ...................................................................................... 72
Design and Wrapper Files .............................................................................................................................. 72
Dynamically Changing the SerDes Register Values....................................................................................... 75
Using sBus module to enable internal loopback ............................................................................................. 75
Placement of SerDes ....................................................................................................................... 77
Timing Constraints .......................................................................................................................................... 78
Test bench Setup for Simulation ..................................................................................................................... 79
Design Guidelines ............................................................................................................................ 80
Reset Sequence ............................................................................................................................................. 80
SerDes Placement and Clocking Limitations .................................................................................................. 80
Wide Bus ......................................................................................................................................................... 86
Design Tips ..................................................................................................................................................... 87
Variants of the Simple Design .......................................................................................................... 88
Design Bypassing PCS: .................................................................................................................................. 93
Bypassing PCS by Manually Overr iding Cor r espo ndi ng Reg ister .................................................................. 95
Dynamic Read/Write of Ser Des Re gis t e rs via SBUS .................................... 98
Overview .......................................................................................................................................... 98
Alternatives for using SBUS interface for SerDes register access: ................................................................ 98
ACX_SERDES_SBUS_IF Module ................................................................................................... 99
The Ports of ACX_SERDES_SBUS_IF Module: .......................................................................................... 100
Loopback Modes ........................................................................................................................................... 102
SerDes Registers ........................................................................................... 103
Electrical Specifications ............................................................................... 104
Operating Conditions ..................................................................................................................... 104
Transmitter .................................................................................................................................... 105
Receiver ........................................................................................................................................ 108
Eye Diagram ................................................................................................................................................. 110
Reference Clock ............................................................................................................................ 112
Jitter Specification ......................................................................................................................................... 112
Revision Histor y ............................................................................................ 113
4 UG028, July 1, 2014
Page 5

List of Figures
Figure 1: Location of SerDes Lanes ...................................................................................................................................... 11
Figure 2: SerDes Architecture................................................................................................................................................ 12
Figure 3: PMA Architecture .................................................................................................................................................. 13
Figure 4: Synthesizer Architecture ....................................................................................................................................... 14
Figure 5: Receiver Architecture ............................................................................................................................................. 15
Figure 6: PCS Transmitter Block Overview ......................................................................................................................... 16
Figure 7: 20 bit Order Reversal ............................................................................................................................................. 17
Figure 8: 20-bit Byte Order Swap/Reversal ......................................................................................................................... 17
Figure 9: Polarity Inversion (16-bit Word) .......................................................................................................................... 18
Figure 10: Bit Order Inversion (16-bit Word) ...................................................................................................................... 18
Figure 11: Word Order Inversion (16-bit Word) ................................................................................................................. 19
Figure 12: 8b/10b Encoding Process ..................................................................................................................................... 21
Figure 13: PCS Receive Block Overview .............................................................................................................................. 22
Figure 14: Operating principle of deskew technique ......................................................................................................... 25
Figure 15: EFIFO SKP Addition/Removal ........................................................................................................................... 29
Figure 16: EFIFO SKP Addition/Removal: PCIE, GigE (802.3) and XAUI (802.3) ......................................................... 30
Figure 17: SerDes RX and TX clocks ..................................................................................................................................... 36
Figure 18: PMA Loopback Modes ........................................................................................................................................ 39
Figure 19: Looback modes ..................................................................................................................................................... 39
Figure 20 Worst-case latency across PMA and PCS (in terms of clock-cycles) .............................................................. 44
Figure 21: Opening IP Configuration Perspective .............................................................................................................. 50
Figure 22: New IP Configuration Window ......................................................................................................................... 51
Figure 23: New IP Configuration Window- Overview Page ............................................................................................ 52
Figure 24: Outline Window ................................................................................................................................................... 52
Figure 25: IP Diagran Window ............................................................................................................................................. 52
Figure 26: New IP Configuration Window – Populating Overview Page ...................................................................... 53
Figure 27: Issues with Setting TX/RX data rate and reference clock frequency ............................................................. 56
Figure 28: Unavailable Fields ................................................................................................................................................ 57
Figure 29: PMA Settings Window – First page ................................................................................................................... 58
Figure 30: Outline Window, When Lane-Specific PMA Settings are Enabled ............................................................... 59
Figure 31: PCS Settings Window – First page ..................................................................................................................... 63
Figure 32: PCS Settings for Receiver – Default Settings .................................................................................................... 64
Figure 33: PCS Settings for Receiver – Symbol Alignment ............................................................................................... 66
Figure 34: PCS Settings for Receiver – TX PCS Settings .................................................................................................... 68
Figure 35: Generating the Wrapper Files ............................................................................................................................. 70
Figure 36: TCL console message upon successful generation of wrapper files .............................................................. 71
Figure 37: Clock Region View ............................................................................................................................................... 82
Figure 38: Physical assignment of SerDes Lanes ................................................................................................................ 84
Figure 39: SerDes Placement Guidelines ............................................................................................................................. 85
Figure 40: PCS Settings for Receiver – Configurations for Decoder and Elastic FIFO .................................................. 91
Figure 41: Disabling PCS from ACE GUI ............................................................................................................................ 95
Figure 42: Modifying Register Settings from ACE GUI .................................................................................................... 96
Figure 43: Changing Value of Register 17A to bypass PCS block .................................................................................... 97
Figure 44: Disabling PCS Decoder (default ACE Setting) ................................................................................................. 99
Figure 45: Connections for ACX_SERDES_LOOPBACK_CTRL .................................................................................... 101
Figure 46: Receiver (RX) Eye Diagram Specification ....................................................................................................... 110
UG028, July 1, 2014
5
Page 6

List of Tables
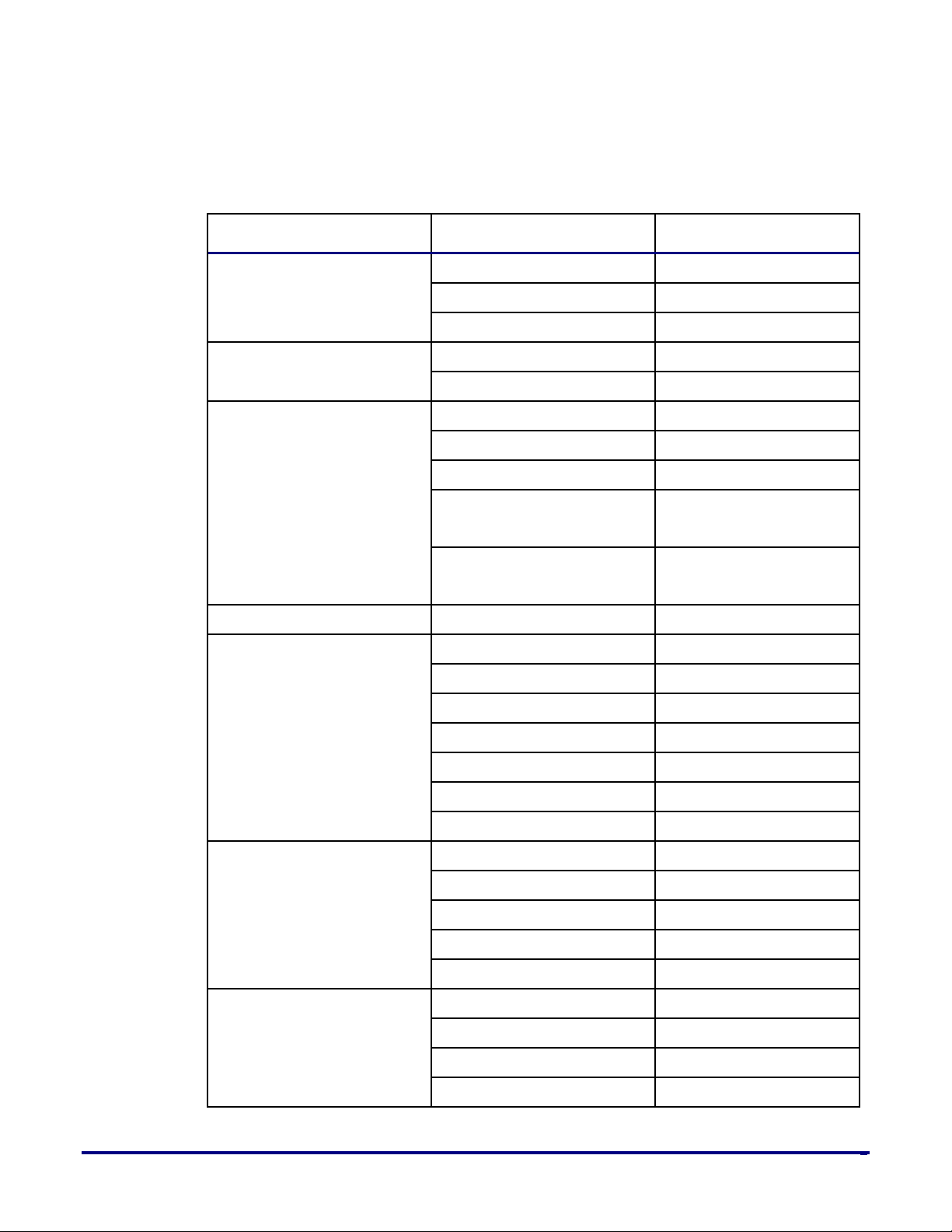
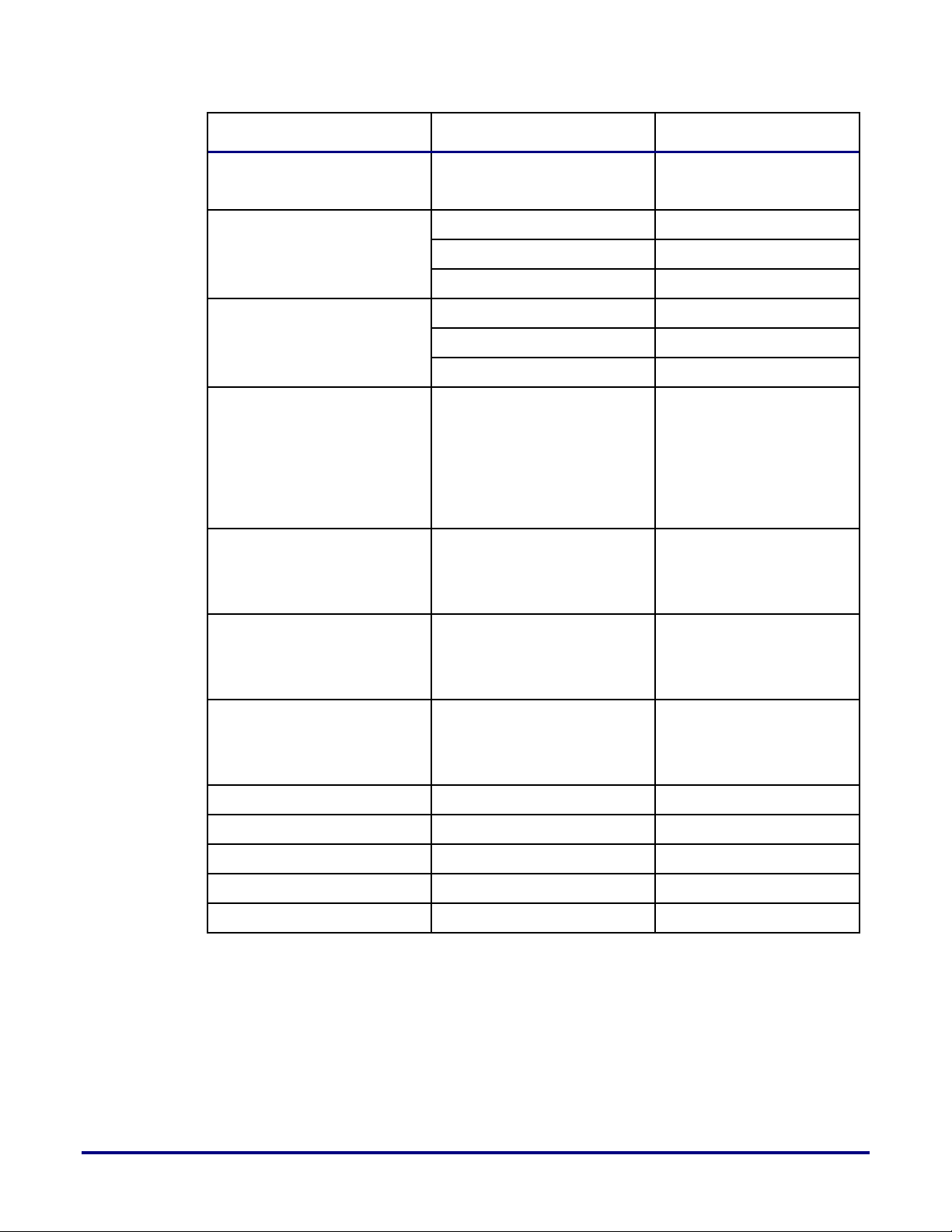
Table 1: SerDes Standards........................................................................................................................................................ 9
Table 2: Symbol Slip Paramaters........................................................................................................................................... 27
Table 3: Shift Limit .................................................................................................................................................................. 31
Table 4: List of Important Interface Signals for bit slider .................................................................................................. 32
Table 5: PIPE Interface Paramaters ....................................................................................................................................... 35
Table 6: PRBS Patterns in PMA ............................................................................................................................................. 40
Table 7: PRBS Patterns in the PCS ........................................................................................................................................ 40
Table 8: Analog latency as a function of databus width .................................................................................................... 42
Table 9: Latency across the PCS blocks ................................................................................................................................ 43
Table 10:
Table 11: Supported Receiver (RX) Features ....................................................................................................................... 47
Table 12: Entry fields for Overview page ............................................................................................................................ 53
Table 13: RX PMA Equalization ............................................................................................................................................ 59
Table 14: RX PMA PLL Settings ............................................................................................................................................ 61
Table 15: TX PMA Driver Settings ........................................................................................................................................ 62
Table 16: TX PMA PLL Settings ............................................................................................................................................ 63
Table 17: RX PCS Settings ...................................................................................................................................................... 64
Table 18: Symbol Alignment Settings (PCS) ....................................................................................................................... 66
Table 19: TX PCS Settings ...................................................................................................................................................... 69
Table 20: Signals passed between the SerDes Instance and the Top-Level module ...................................................... 73
Table 21: Modifications for simple_serdes_design_efifo (RX PCS Settings)................................................................... 89
Table 22: Operating Conditions .......................................................................................................................................... 104
Table 23: DC and AC Switching Characteristics .............................................................................................................. 105
Table 24: Jitter ........................................................................................................................................................................ 106
Table 25: Return Loss ........................................................................................................................................................... 107
Table 26: DC and AC Switching Characteristics .............................................................................................................. 108
Table 27: Receiver (RX) Eye Diagram Specification ......................................................................................................... 110
Table 28: Return Loss ........................................................................................................................................................... 111
Table 29: Reference Clock Electrical Speficiations ............................................................................................................ 112
Table 30: Reference Clock Jitter Specification ................................................................................................................... 112
Supported Transmitter (TX) Features
.................................................................................................................. 45
6 UG028, July 1, 2014
Page 7
Chapter 1 – SerDes Architecture
Overview
Achronix Speedster22i FPGAs provide very high core fabric and I/O performance which
exceeds the system bandwidth requirements of various high end applications. The
Speedster22i device family supports up to 64 full-duplex SerDes lanes, each supporting up to
11.3 Gbps data rate.
The Physical Coding Sublayer (PCS) and Physical Media Attachment (PMA) sub-blocks
together comprise a single SerDes block. The SerDes PCS has explicit support for PCIe,
10GBASE-R, 1G Ethernet and XAUI. It also has some support for various other interconnect
protocols through PCS such as Interlaken, SPI4.2, Infiniband, Fiber-Channel, SAS/SATA,
SONET, OC, OBSAI and CPRI. The SerDes can be connected either to the embedded HardIPs (PCIe, Interlaken, and 10/40/100G MAC) or to the FPGA Fabric for soft implementation of
any other protocol supported.
Physical Media Attachment (PMA)
• Data rates supported
o 1.0625 – 11.3 Gbps
o 531.25 – 1062.5 Mbps using 2X over-sampling
o 265.625 – 531.25 Mbps using 4X over-sampling
• Independent lane architecture with dedicated synthesizer for each lane with no off-
chip components required
• Low power architecture (<100mW at 10Gbps)
• Support both AC and DC coupling
• Input driver with Continuous Time Linear Equalizer (CTLE) and Decision Feedback
Equalizer (DFE)
o Input voltage: 50 – 2000 mVp-p differential
o Auto-calibrating CTLE and DFE
o CTLE with up to 20dB gain tuned for key data rates
o Pulse-shaped 5-tap DFE
• Output driver with 4-tap Finite Input Response (FIR) filter with Feed Forward
Equalizer (FFE)
o Output voltage: 400 – 1500 mVp-p differential
o Slew rate: 31 – 170 ps
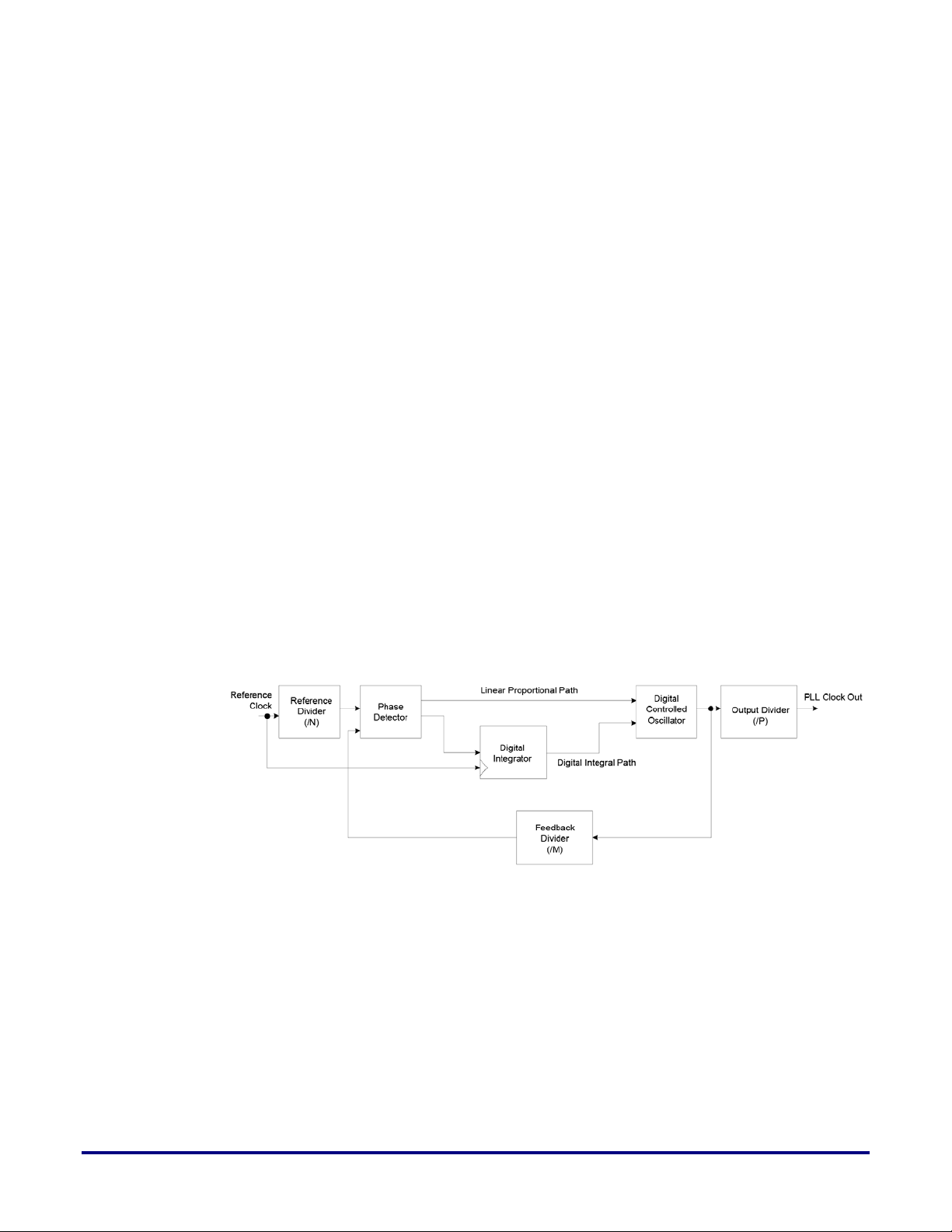
• Highly digital PLL architecture for the Synthesizer and CDR
o Accuracy & low jitter of an analog PLL
UG028, July 1, 2014
o Tuning range of a digital PLL
7
Page 8
o Programmable spread spectrum generation
o Support for 16-bit fractional multiplication factors
o Programmable spread spectrum clocking
o Support for fast lock mode for EPON/GPON
• On-chip scope in the receiver for measuring eye width, eye height and BER for the
incoming signal
• On-chip calibrated 100 ohm termination
• Transparent calibration engine to compensate for PVT variation
Clocking
• Support for external reference clock from 50 MHz – 300 MHz
• Support for recovered reference clock for loop timing and re-timer type applications
that eliminates the need for a cleanup PLL
Physical Coding Sublayer (PCS)
• Bypassable and Modular PCS architecture
• Support for 8b/10b and 128b/130b encoding
• Symbol alignment
• Clock and phase compensation FIFO
• Lane to lane de-skew
• Polarity inversion
• Bit reversal
• Lane bonding
• Low/Deterministic latency modes for protocols such as CPRI and OBSAI
Debug and Test
• Up to seven different near-end and far-end loopback modes in PMA and PCS
• Built-in self test (BIST)
o PRBS 7, 15, 23, 31 and 40-bit user defined pattern generators and checkers in
the PCS
o PRBS 7, 23, 31 and 40-bit user defined pattern generators and checkers in the
PMA
8 UG028, July 1, 2014
Page 9
Major standards supported
Gen 2
5.0 Gbps
Gen 3
8.0 Gbps
SGMII
1.25 Gbps
XAUI (802.3ae)
3.125 Gbps
10GBASE-R (802.3ae)
10.3125 Gbps
(802.3ae)
Interlaken
--
3.125 – 10.3125 Gbps
SPI5
3.125 Gbps
SFI5.1
3.125 Gbps
SFI5.2
9.1 – 10.3125
CEI 6G
4.976 – 6.375 Gbps
CEI 11G
9.95 – 11.2 Gbps
FC-2
2.125 Gbps
FC-4
4.25 Gbps
FC-10
10.52 Gbps
OC-12
622.08 Mbps
OC-48
2488.32 Mbps
OC-192
9953.28 Mbps
Table 1: SerDes Standards
Standards Variation Data Rate(s)
Gen1 2.5 Gbps
PCI Express
Gigabit Ethernet
10 Gigabit Ethernet
OIF
1000BASE-CX 1.25 Gbps
XFI 10.3125 Gbps
10GBase-KR
10.3125 Gbps
XLAUI/CAUI
10.3125 Gbps
(802.3ae)
SFI4.2 3.125 Gbps
SFI-S 11.1 Gbps
UG028, July 1, 2014
FC-1 1.0625 Gbps
Fiber Channel
FC-8 8.5 Gbps
OC-24 1244.16 Mbps
SONET
9
Page 10
Standards Variation Data Rate(s)
6.4 Gbps
SATA-1
1.5 Gbps
SATA-2
3.0 Gbps
SATA-3
6.0 Gbps
SAS-1
3.0 Gbps
SAS-2
6.0 Gbps
SAS-3
12.0 Gbps
Gen2
6.125 Gbps
10 Gbps
10 Gbps
QDR
10.0 Gbps
JESD204B
Up to 12.5 Gbps
CPRI
--
614.4 – 9830.4 Mbps
OBSAI
--
768 – 6144 Mbps
USB
3.0
5.0 Gbps
USB
3.1
10.0 Gbps
QPI
SATA
SAS
Serial Rapid I/O
E-PON 802.3av
Gen1
Gen1
Gen1
Gen2
4.8 Gbps
1.25 Gbps
2.5 Gbps
3.125 Gbps
5.0 Gbps
1.25 Gbps
2.5 Gbps
GPON --
InfiniBand
SDR
DDR
1.25 Gbps
2.5 Gbps
2.5 Gbps
5.0 Gbps
10 UG028, July 1, 2014
Page 11
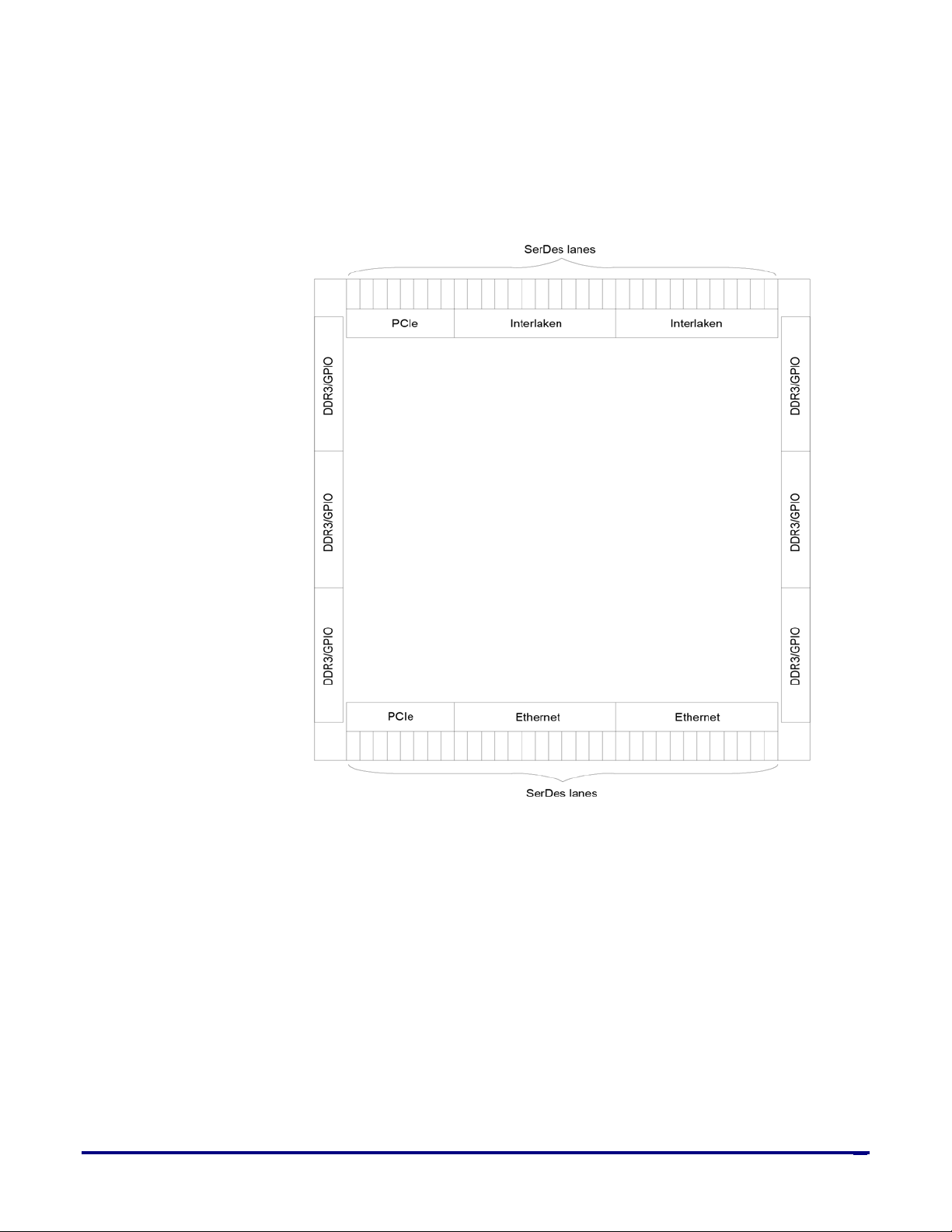
SerDes Placement
The Speedster22i device supports up to sixty-four (64), 11.3 Gbps SerDes lanes. Each side
(Top and Bottom) has thirty-two (32), 11.3 Gbps SerDes. The lanes are organized by channel
based, and are placed as illustrated in “
Figure 1: Location of SerDes Lanes
” below.
UG028, July 1, 2014
Figure 1: Location of SerDes Lanes
11
Page 12
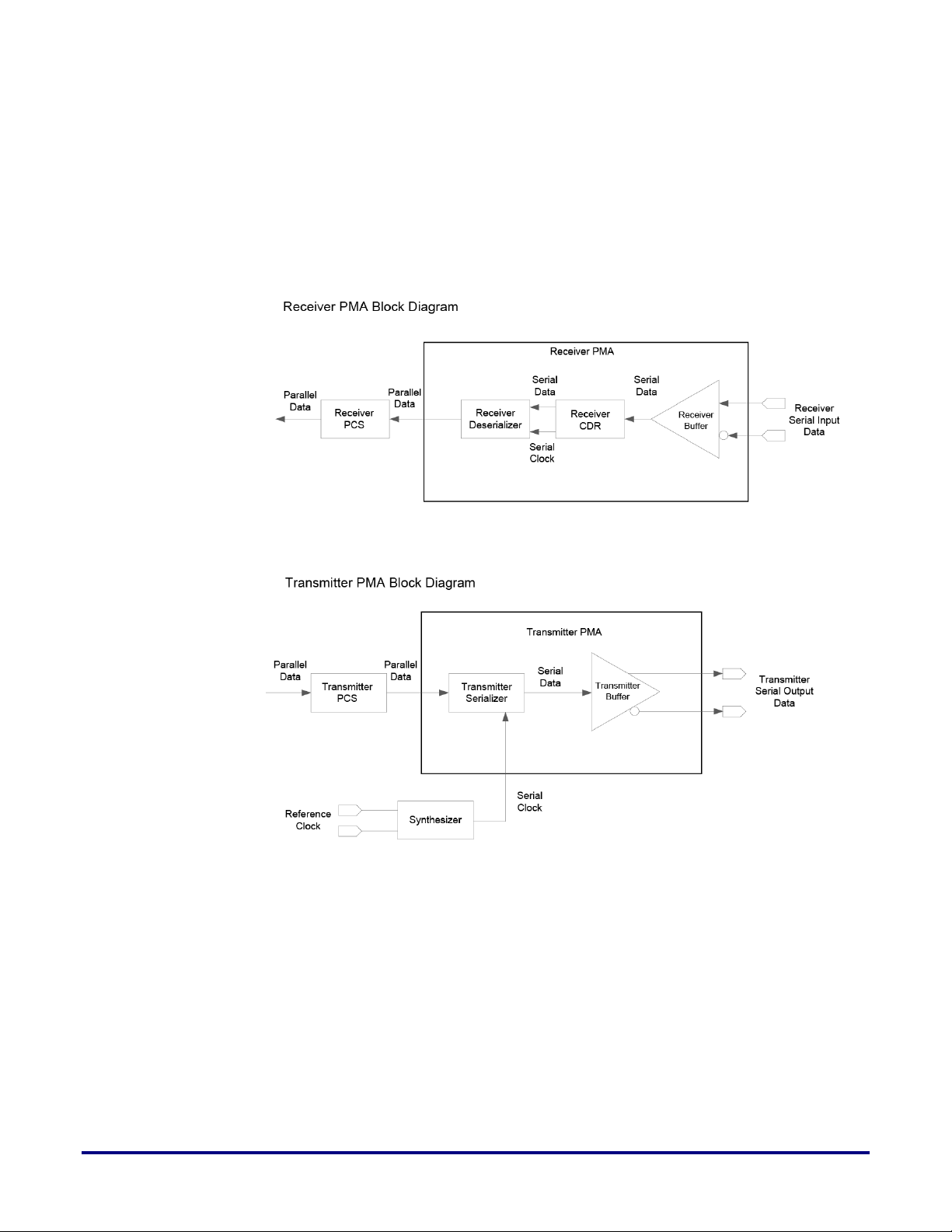
SerDes Architecture Overview
The SerDes has an independent lane architecture. Each lane has a Physical Media Attachment
(PMA), Synthesizer (Transmit PLL), Clock and Data Recovery (CDR) and Physical Coding
Sublayer (PCS). The Receiver PMA and Transmitter PMA block diagrams are shown in
“Figure 2: SerDes Architecture” below.
Figure 2: SerDes Architecture
The SerDes primarily consists of the following blocks:
• PMA
• PCS
• PCS interface to FPGA fabric
• Clocking
• Debug and Test
12 UG028, July 1, 2014
Page 13
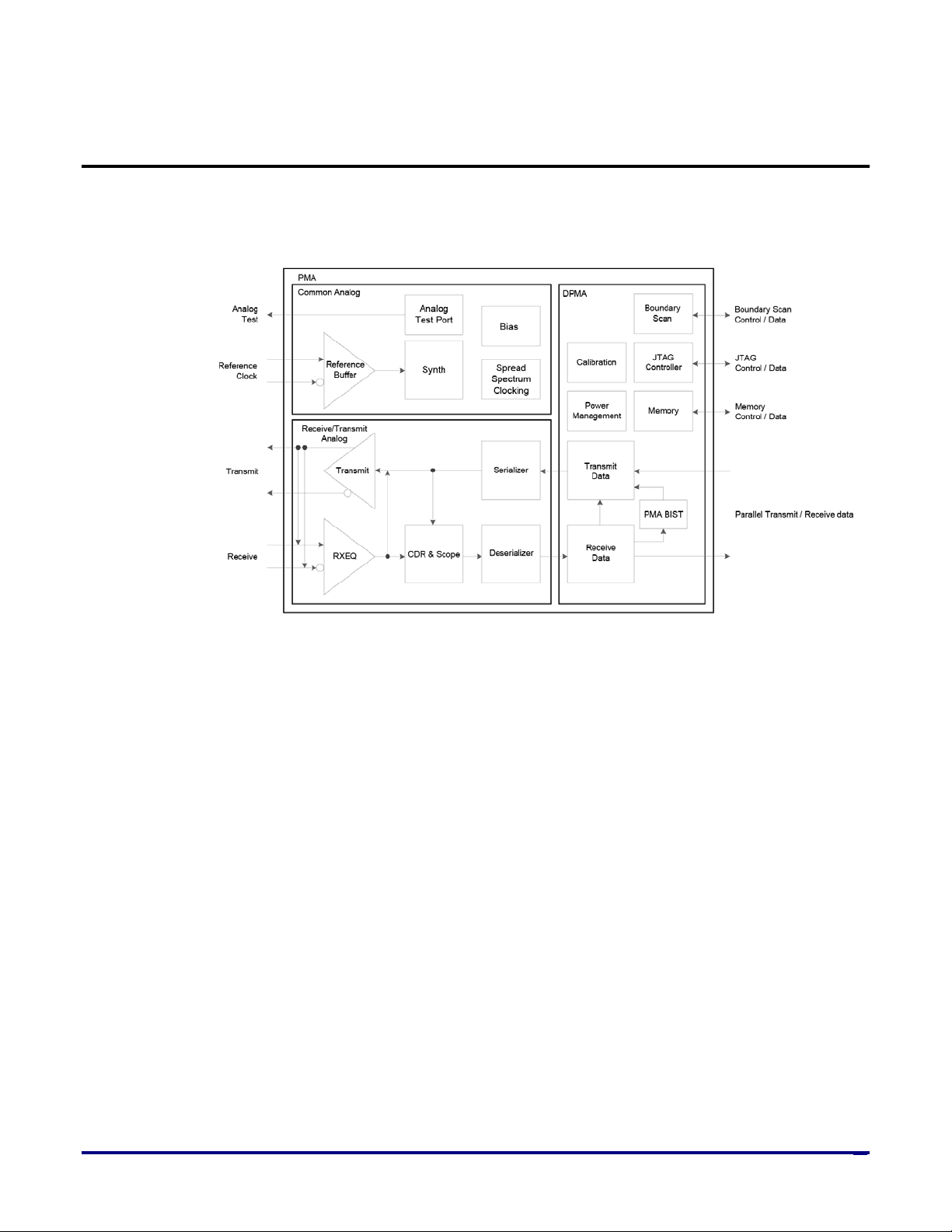
Physical Media Attachment (PMA)
The PMA architecture is shown in “Figure 3: PMA Architecture” below.
Figure 3: PMA Architecture
The PMA consists three major blocks:
1. Common
2. Receiver/Transmitter (RX/TX)
3. Digital PMA (DPMA)
1. Common
The common block consists of the following circuits:
• Reference clock: This circuit performs reference clock buffering and division before
feeding it to the Synthesizer.
• Synthesizer: The synthesizer (transmit PLL) generates the high speed clock for the
serializer of the Transmitter. It also has in-built circuit for spread-spectrum clocking
• Bias: The biasing circuit is responsible for controlling the offsets and biasing for the
all the analog circuits in the PMA
• Analog Test Port: This port is used by Achronix for manufacturing tests and for
debugging purposes
UG028, July 1, 2014
13
Page 14
2. Receiver (RX)/Transmitter (TX)
The RX/TX block consists of the following circuits:
• TX buffer: Converts single-ended signal to differential and performs equalization on
(or pre-emphasis) the outgoing serial signal
• RX buffer: Converts differential signal to single ended and performs equalization on
incoming signal using Continuous Time Linear Equalizer (CTLE) and Decision
Feedback Equalizer (DFE)
• Clock Data Recovery (CDR): Recovers clock and data from the incoming signal for
deserialization
• On-Chip Scope: Used for plotting an eye of the incoming signal post equalization for
debug
• Serializer/Deserializer: Converts parallel data to serial data using a high speed clock
from the synthesizer
3. Digital PMA (DPMA)
The DPMA block consists of the following circuits:
• Calibration: Performs calibration of all the analog circuits using trim settings and
offsets
• PMA BIST: Includes PRBS 7, 23, 31 and 40-bit user defined pattern generators and
checkers Power management
• Configuration registers (Memory)
• JTAG and Boundary Scan
Figure 4: Synthesizer Architecture
14 UG028, July 1, 2014
Page 15
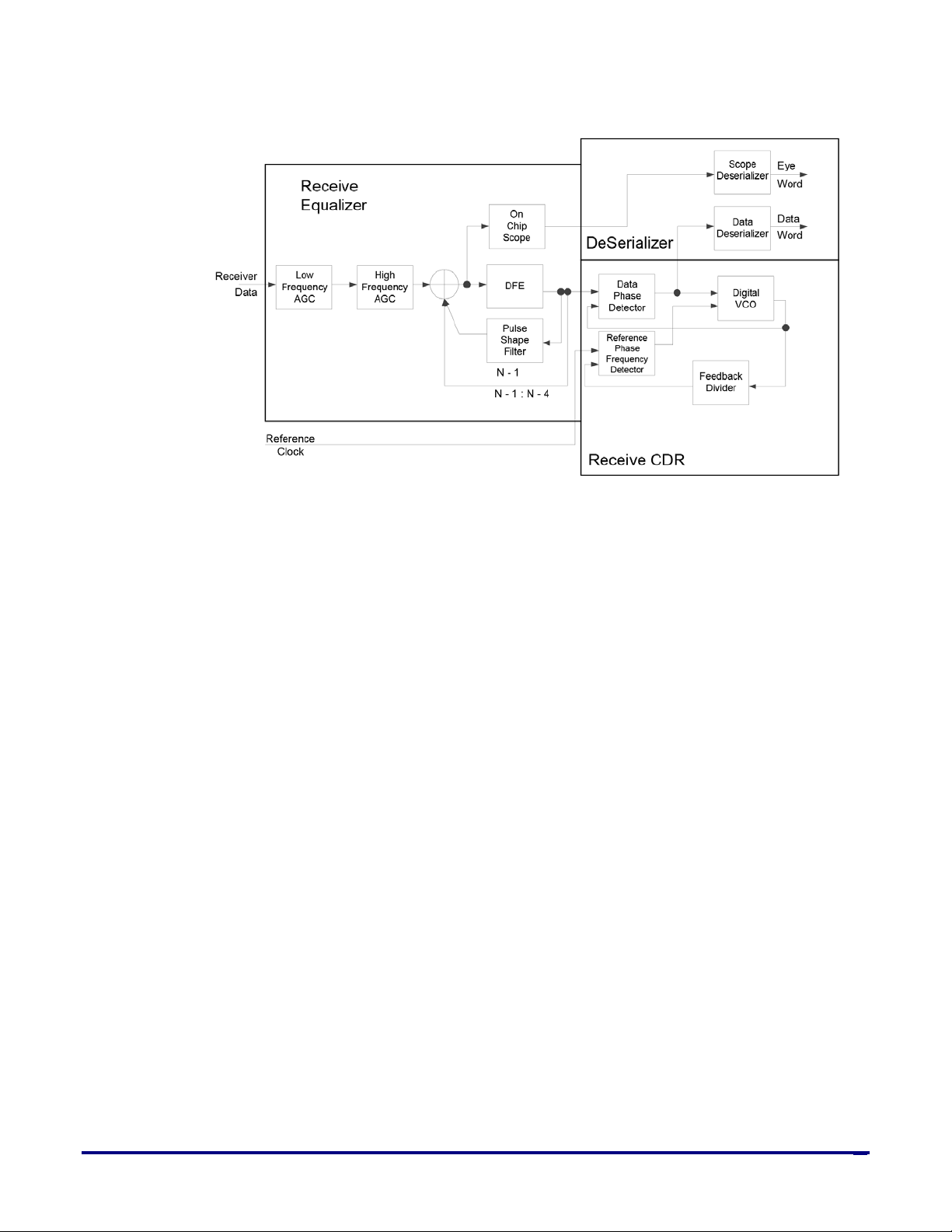
Figure 5: Receiver Architecture
UG028, July 1, 2014
15
Page 16
PCS Blocks in the Transmitter (TX)
This section presents the transmitter (TX) data path within a PCS. The key blocks within the
SerDes transmitter are:
• Encoder: Encodes the data for transmission line. Primary goal is to ensure DC
balance by eliminating long sequence of 1’s or 0’s.
• Polarity Bit Reversal (PBR): Inverts the polarity of data and ordering of data to be
transmitted.
The building block for the SerDes IP is the 1 lane configuration. A simplified block diagram
of the TX data path is shown in Figure 6: - PCS Transmitter Block Overview . The functional
blocks shown in the diagram represent the functionality supported by a single SerDes lane. A
summary of the supported standards is covered in “Table 1 – SerDes Standards”.
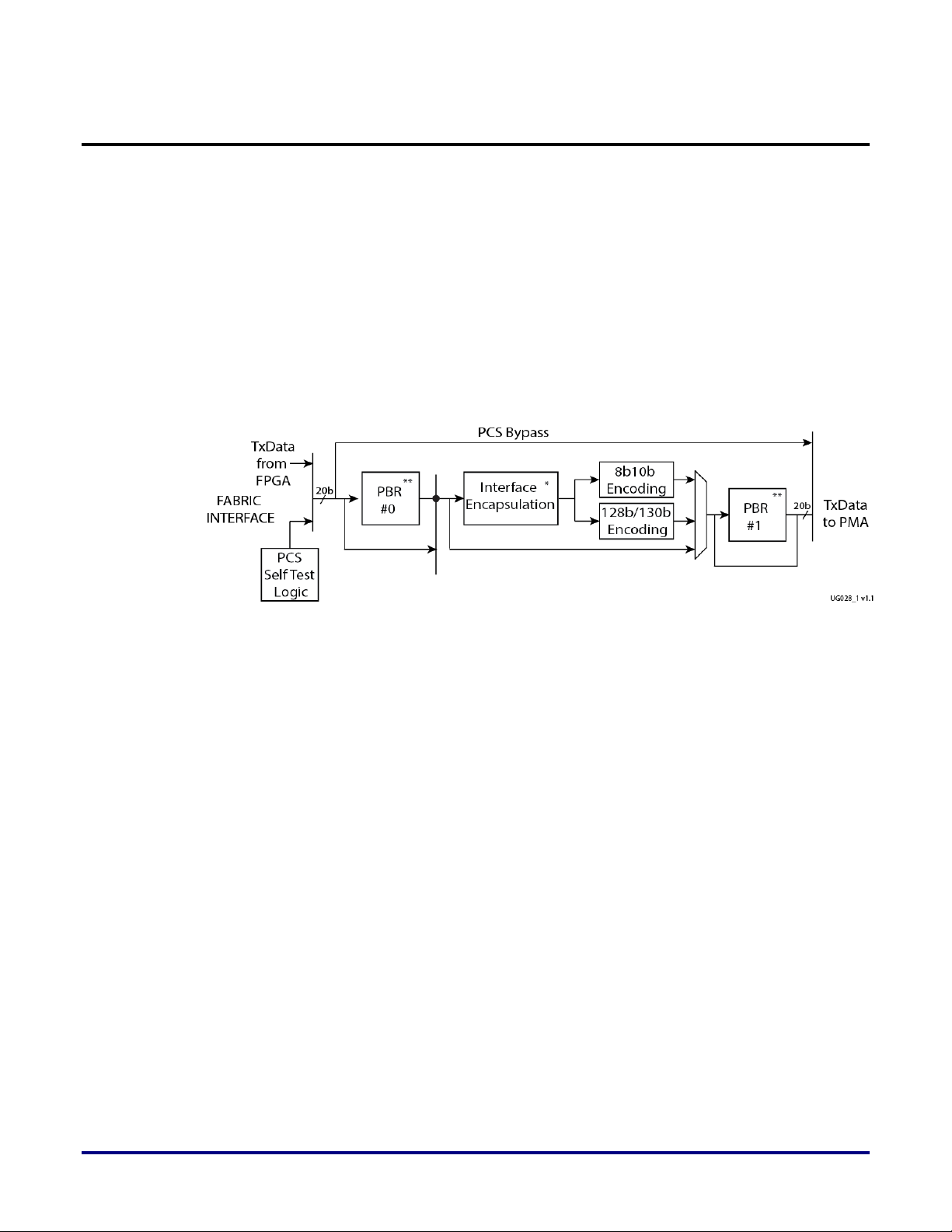
Figure 6: PCS Transmitter Block Overview
* SerDes configured in Generic mode supports only 8b/10b encoding.
** Either of PBR#0 or PBR#1 can be used or both may be bypassed.
Note: The PCS block will support lane-bonding across multiple SerDes lanes (max 12)
Chapter – “Design Flow: Creating a SerDes Design” presents the ground-up steps that can be
followed to prepare a design that supports lane-bonding.
The PCS blocks on TX path are detailed below.
PCS Self Test Logic
This block generates transmit data for PCS self test, detailed in “PCS Test Pattern Generator”
and “PCS Test Pattern Checker”.
Polarity bit reversal (PBR) #0 and #1
This block can invert the polarity of the incoming data. It can also reverse the bits of the
incoming data such that effectively the most significant bit is sent first, rather than the least
significant bit (default). For 16/20bit (2 words) bit streams, the word order can also be
inverted such that effectively the most significant byte is sent first, rather than the least
significant byte (default).
There are two PBR blocks on transmission data path, as shown in “Figure 6: PCS Transmitter
Block Overview”. PBR0 is used before the protocol encapsulation block and PBR1 is used on
encoded data. Either PBR0 or PBR1 can be used. Alternatively, both of these two blocks can
be bypassed.
16 UG028, July 1, 2014
Page 17
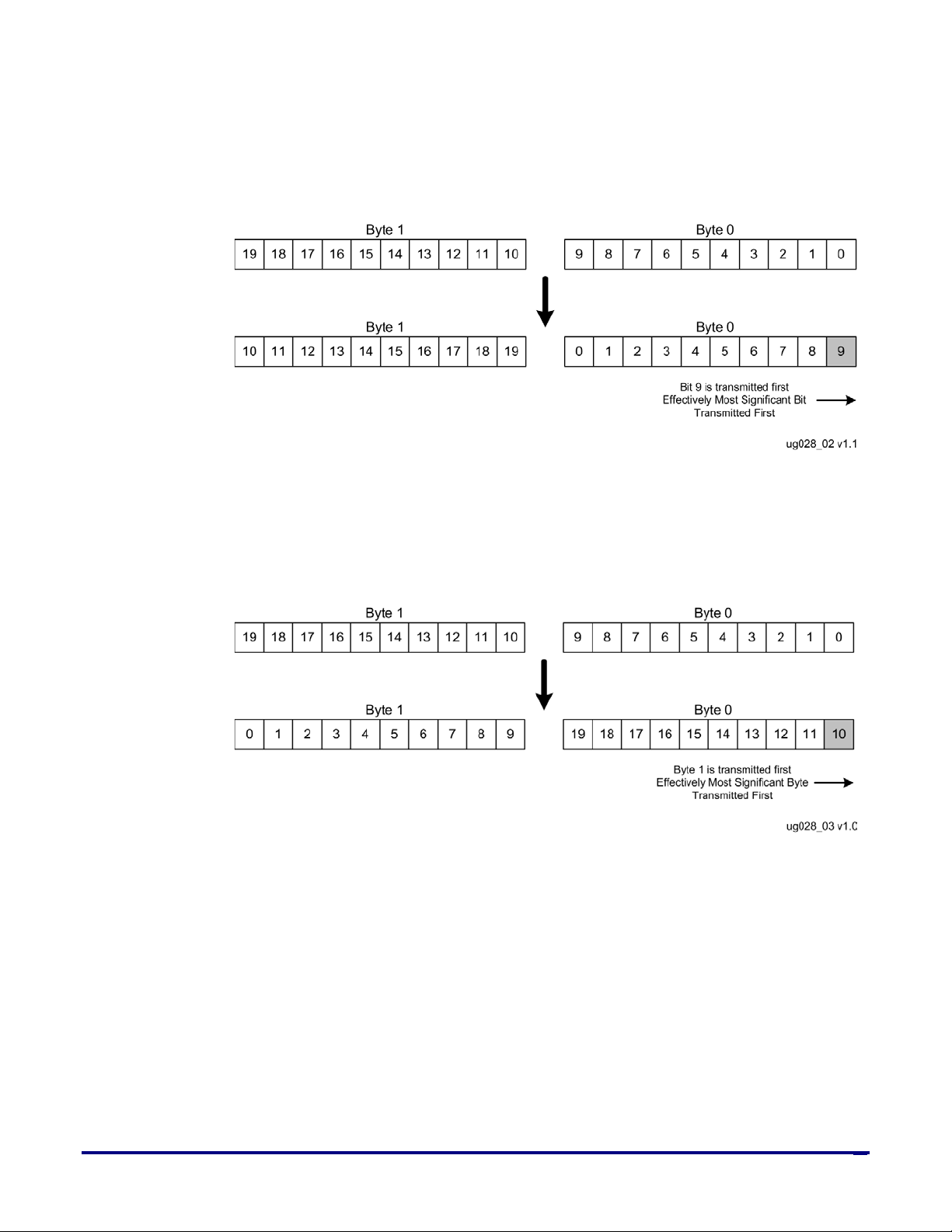
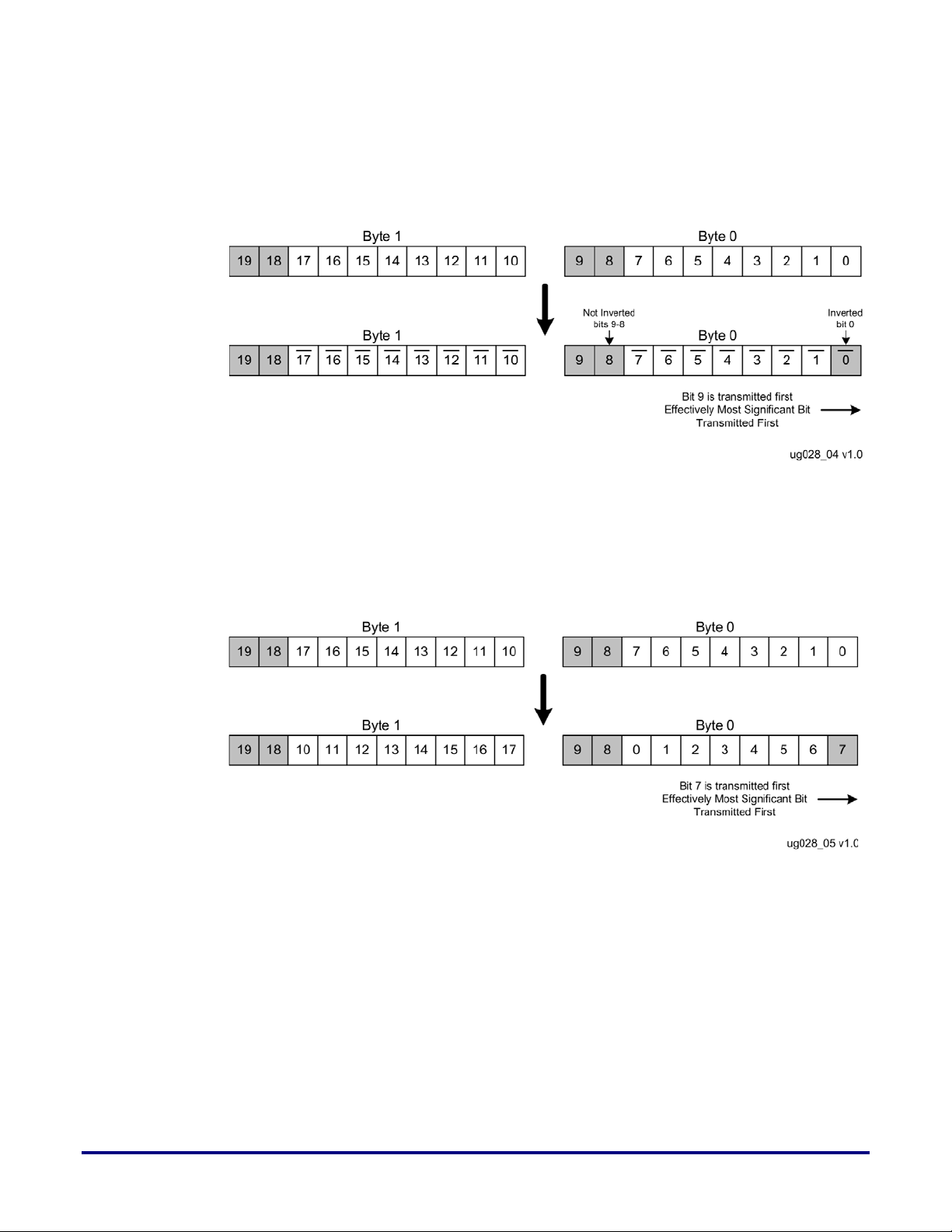
Polarity and Bit Inversion – 10/20 bit Operation
When operating in 10bit/20bit mode, the bit order within each 10-bit word can be inverted.
This is illustrated in “Figure 7: 20 bit Order Reversal”. Effectively the most significant bit of
the least significant byte is transmitted first (i.e. bit 9 of byte 0 is transmitted first).
Figure 7: 20 bit Order Reversal
When the word order is reversed in 20-bit mode, the most significant byte (byte 1) is
swapped with the least significant byte (byte 0). This is illustrated in “Figure 8: 20-bit Word
Order Inversion”. The most significant byte will be transmitted first in such a case
Figure 8: 20-bit Byte Order Swap/Reversal
The polarity for the entire 10bit or 20bit word can be inverted as well. Polarity inversion
applies to the entire word (10 bits or 20 bits).
UG028, July 1, 2014
17
Page 18
Polarity and Bit Inversion – 8/16 bit Operation
When the polarity is inverted in 8bit/16bits mode, only bits [17:10] and [7:0] are inverted, bits
[19:18] and [9:8] are not inverted. This is illustrated in “Figure 9: Polarity Inversion (16-bit
Word)”.
Figure 9: Polarity Inversion (16-bit Word)
When the bit order is inverted in 8bit/16bit mode, bits [7:0] of byte 0 are swapped while bits
[9:8] are not swapped. Similarly bits [17:10] of byte 1 are swapped. This is illustrated in
“Figure 10: Bit Order Inversion (16-bit Word)”. In this mode, the most significant bit of the
least significant byte is transmitted first.
Figure 10: Bit Order Inversion (16-bit Word)
When the word order is inverted in 16-bit mode, byte 1 is swapped with byte 0. This is
illustrated in “Figure 11: Word Order Inversion (16-bit Word)”.
18 UG028, July 1, 2014
Page 19
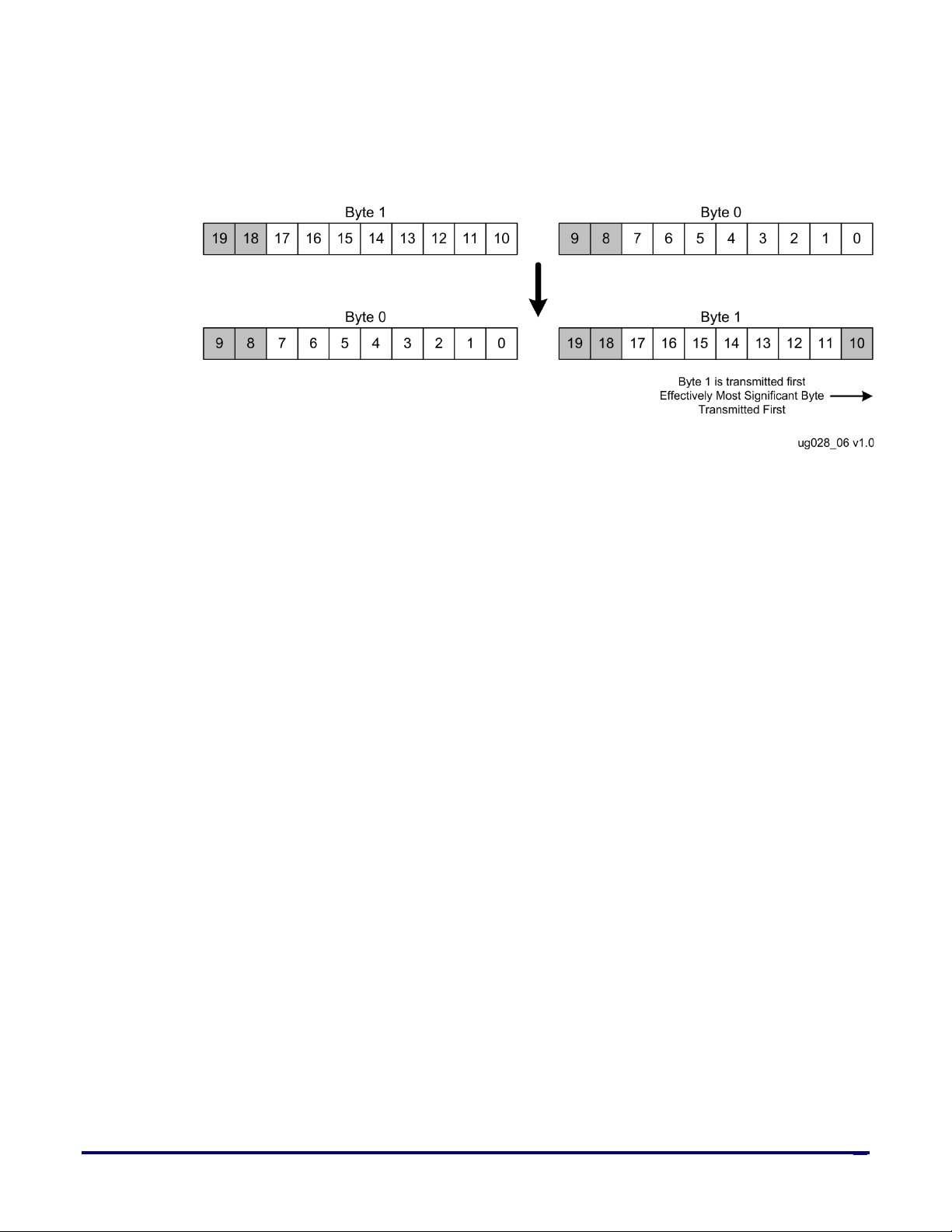
Figure 11: Word Order Inversion (16-bit Word)
UG028, July 1, 2014
19
Page 20

Interface Encapsulation
This block encapsulates the protocols supported by the SerDes in Achronix FPGA. The user
may refer to Section – “PCS Interface” for details on the protocols supported. It may be noted
again that the SerDes configured in Generic mode supports only 8b/10b encoding.
8b/10b Encoder
The 8b/10b encoder generates 10-bit code groups from 8-bit data and a 1-bit control input. It
uses the code group mapping specified in IEEE 802.3 clause 36. If the fabric interface is a 16bit data path, then two 8b/10b encoders are cascaded to produce a 20-bit code group output
to the PMA for serialization.
The 8b/10b encoder essentially translates 8-bit words to 10-bit symbols. This encoding
scheme has been proven to achieve DC-balance and running disparity while providing
sufficient information for clock recovery. (See the later sections for more information on DCBalance, running disparity and clock recovery.) The 10-bit encoded output TX_dataout[9:0]
will map to bits {jhgf iedcba}per the labeling used in IEEE 802.3-2005 clause 36.
Symbols and Comma Character
While translating 8-bit words into 10-bit symbols, the 8b/10b encoder (in SerDes PCS) form
two groups of data. The lower 5-bits of data are encoded into a 6-bit group and the upper 3bits of data are encoded into a 4-bit group. Furthermore, there are 12 control symbols that are
used by 8b/10b encoding scheme for special purposes and are called K-symbols. For instance
three of these control symbols can be used for defining the boundary between data packets.
These three control symbols are called comma symbols.
The 8b/10b encoder generates 10-bit code groups from 8-bit data and a 1-bit control input. It
uses the code group mapping specified in IEEE 802.3 clause 36. If the fabric interface is a 16bit data path, then two 8b/10b encoders are cascaded to produce a 20-bit code group output
to the PMA for serialization. The 1-bit control input (datak signal) is used to identify whether
data being transmitted is a comma symbol. Asserted value for datak signal on control-line
indicates that the symbol on data-line is a comma symbol.
In Section-“Design and Wrapper Files” of the Chapter – “Design Flow: Creating a SerDes
Design”, details are provided on how to transmit 8’hBC (K.28.5) as comma symbol and 1’b1
as control signal, for a sample design. For a 20-bit data width, that design essentially uses
{2’h1, 8’hBC, 2’h1, 8’hBC}. In other words, while sending a comma symbol, TX_data[8:8] =
TX_data[18:18] = 1’b1 is sent through the control-line.
Note: On the receiver end, when the decoder finds an ‘asserted’ control-bit on control-line, it
will consider the symbol on data-line as a comma symbol. Error conditions occur if the datak
signal is asserted while there is no comma symbol on the data line (e.g. K21.5).
Running Disparity
A non-encoded data stream may have differences between the number of 1’s and the number
of 0’s. The primary goal of using running disparity in the encoding scheme is to limit the
difference between the number of 1’s and the number of 0’s that are being transmitted. This
ensures DC balance on the transmission line. A side-benefit of using running disparity is that
information from running disparity can be used in locating transmission errors. This ensures
that the output data is DC balanced. The maximum run length for 8b/10b words is 5 bits.
20 UG028, July 1, 2014
Page 21
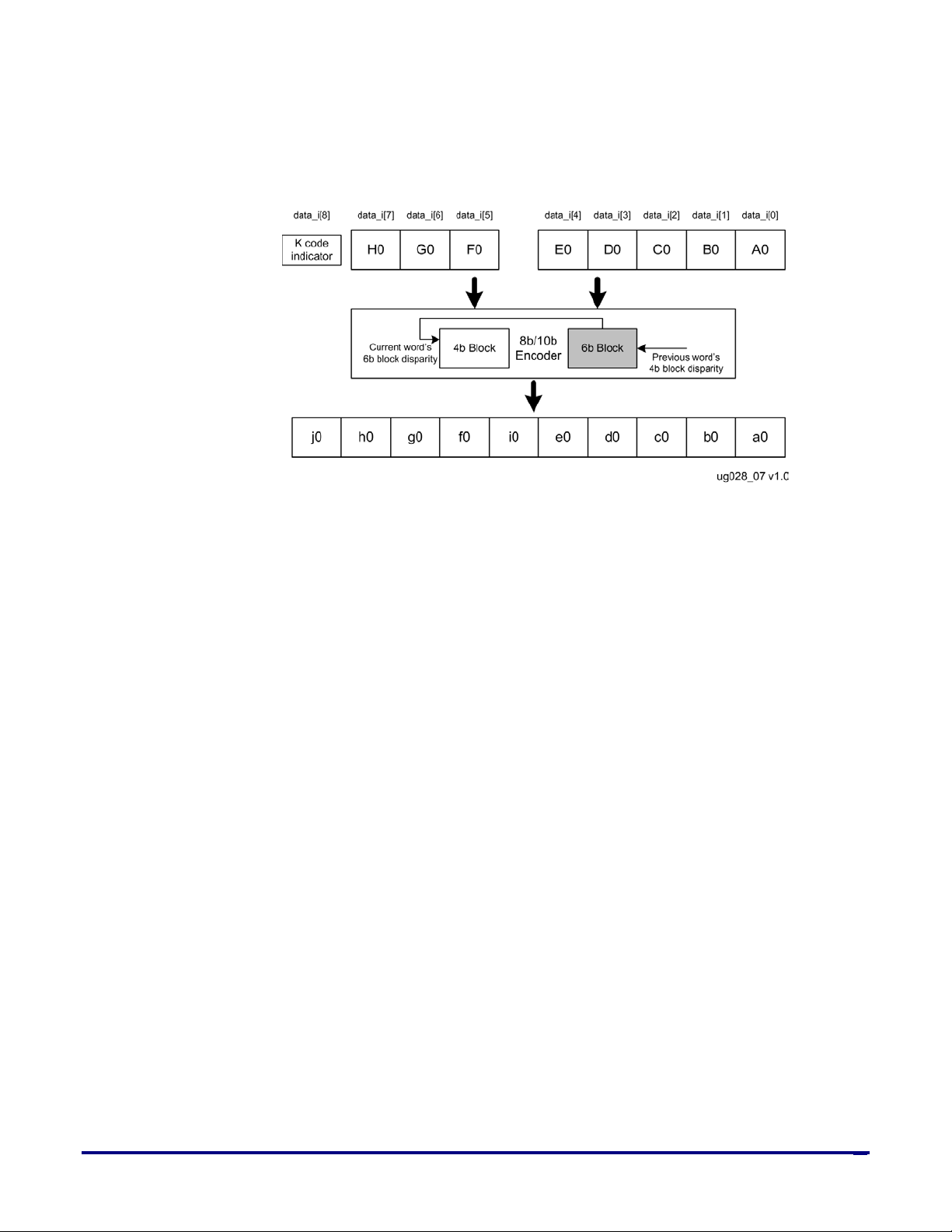
The input disparity for the 6 bit block is based on the disparity of previous word’s 4 bit block
while the disparity for the 4 bit block is the disparity of the current word’s 6 bit block. This is
illustrated in “Figure 12: 8b/10b Encoding Process”.
Figure 12: 8b/10b Encoding Process
UG028, July 1, 2014
21
Page 22
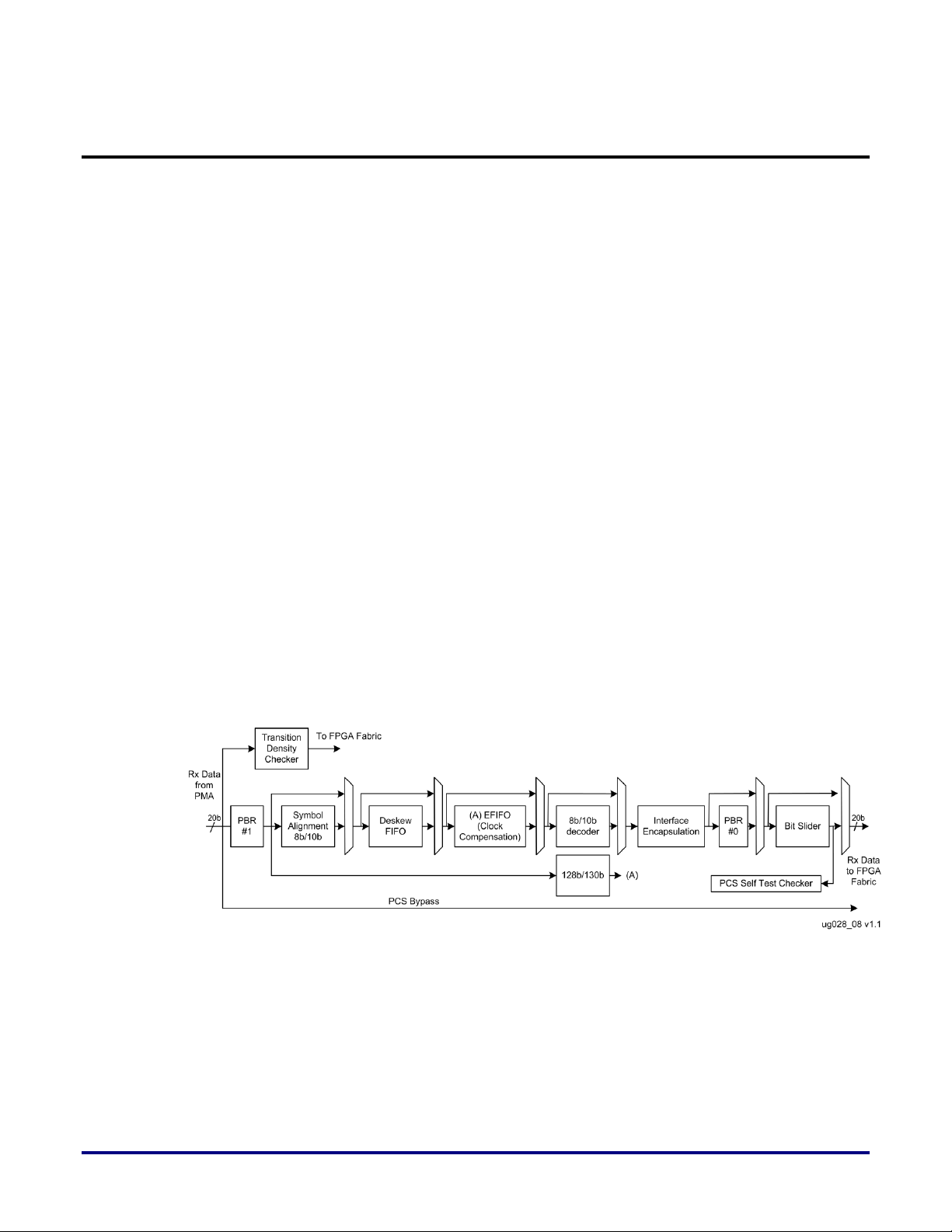
PCS Blocks in the Receiver (RX)
This chapter describes the PCS components on the receiver data path. The functional block
diagram of the receiver is shown in “Figure 13: - PCS Receive Block Overview”. The key
blocks in the RX-PCS include:
• Transition Density Checker (TDC): Generates a trigger bit when the number of
consecutive 1’s or 0’s reaches a pre-defined value.
• Polarity Bit Reversal (PBR): Inverts data, swaps byte ordering and reverses bit-
ordering, if used on the TX data path.
• Symbol Alignment: Uses alignment characters and sequences to define the symbol
boundary on the incoming data-stream.
• Decoders: Generates 8-bit code group and 1-bit control signal from the 10-bit
encoded (received) data.
• Deskew First-In-First-Out (FIFO): Synchronizes the data received across the lanes
when lane-bonding is used.
• Clock Compensation (Elastic FIFO): Synchronizes the data received on PMA at
recovered clock domain with a system clock (typically the transmit clock).
• Bit Slider: Takes care of bit-wise skew from the fabric, when used.
• PCS Interface Encapsulation: Provides interface with the fabric. Supports Gigabit
Ethernet, XAUI, Pipe and 10G Ethernet interfaces.
• PCS Self Test Checker: Self checking module, detailed in Chapters “PCS Test Pattern
Generator” and “PCS Test Pattern Checker”
The main features for the supported standards in the PCS side can be found in Chapter
“Major standards supported”
Figure 13: PCS Receive Block Overview
Transition Density Checker (TDC)
The transition density checker monitors the parallel RX data bus from the PMA and monitors
the number of consecutive 0s or 1s, called run length. If the number reaches a pre-configured
value, the checker sets a trigger bit to indicate the transition density violation. This preconfigured value is called threshold and the minimum threshold programmed is half the
width of data path. In case scaling is used the actual threshold effective will be the one shown
in “Equation 1”
22 UG028, July 1, 2014
Page 23

Equation 1:
+
The assert signal from Transition Density Checker can be taken to fabric.
Note: Any bit transition would cause the counter to clear and the count to restart.
= (
)
Polarity Bit Reversal (PBR)
The polarity bit reversal block is used to invert data, swap byte ordering, and reverse bitordering. There are two such PCS blocks on the receive path, corresponding to the two
polarity bit reversal blocks on the transmit path.
When the polarity bit reversal on transmit path is performed before protocol encapsulation
(PBR #0 on “Figure 6: PCS Transmitter Block Overview”), the PBR block after protocol
encapsulation is used on receive path (PBR #0 on “Figure 13: - PCS Receive Block
Overview”). In contrast, if PBR operation is performed on encoded data on the transmit path
(PBR #1 on “Figure 6: PCS Transmitter Block Overview”), the PBR block before symbol
alignment/decoder block is used on the receive path (PBR #1 on “Figure 13: - PCS Receive
Block Overview”). As noted earlier, both of these blocks can be disabled, both on the transmit
and the receive paths.
Symbol Alignment
Symbol alignment uses alignment and sequence characters for identifying the correct symbol
boundary in the received data-stream. Attributes for alignment and sequence detect symbols
are specified to be 10-bit wide. But when received data-path is in 8-bit (or 16-bit) wide mode,
only the lower 8-bits of attribute will be considered.
The symbol alignment block can be configured to support a variety of standards. Some of
these standards are listed below:
• PCIe
• XAUI
• GigE
• Infiniband
• Serial Rapid IO
• SPI-5 (lock to training pattern)
• CPRI
• OBSAI
• Fiber Channel
Symbol alignment can be programmed to function in the following modes:
UG028, July 1, 2014
• Manual Mode
• Bit slip Mode
• Automatic Mode
23
Page 24

Modes of Operation
Manual Mode:
In manual alignment mode, the symbol alignment will attempt to identify a pre-configured
pattern and lock to the incoming de-serialized data-stream from the output of the PMA or
phase picking block. The alignment operation is triggered by the user logic in the FPGA on
the rising edge of RX_com_det_en. The symbol alignment block then searches for the preconfigured alignment pattern with or without trailing sequence pattern. Fabric will wait for
the lock status. Once lock to the incoming stream is achieved, the fabric can monitor error
status from the 8b/10b decoder or employ any other mechanism in fabric to identify loss of
lock. The Fabric asserts another rising edge to trigger a new alignment cycle.
Bit Slip Mode:
In bit slip mode, the user logic controls the symbol alignment using the RX_bit_slip_en
signal. Each rising edge of RX_bit_slip_en causes the symbol alignment logic to shift the
word boundary by 1-bit, and symbol alignment will attempt to match the alignment pattern
within the new word boundary. If the word boundary is not matched, the user logic can
again assert RX_bit_slip_en, possibly after waiting for a timeout causing the word boundary
to shift by another bit position. This loop continues until lock is achieved. Once lock to the
incoming stream is achieved, logic in the fabric can monitor error status from 8b/10b decoder
or employ some other mechanism in fabric to identify loss of lock. The bit slip mode supports
all attributes used for manual alignment mode. The maximum number of slips that will cause
a true change in alignment is limited to the data path width.
Automatic Mode:
In automatic alignment mode, the symbol alignment block will automatically determine the
location of the word boundary based on the pre-configured alignment characters. It will also
establish a lock acquired condition based on receiving a pre-con d count of alignment
characters (hysteresis). A loss of lock condition also can be detected by this block based on a
pre-configured count of bad code words (or alignment characters at a different word
boundary). Instead of counting every bad code word, the user can decide to count every ‘n’
bad code word for an incrementing unlock count. Also, the user can use decode/disparity
errors as per clause 36 of IEEE 802.3 to increment and decrement the unlock counter. Support
for Fiber Channel protocol involves synchronization with the 4-symbol wide transmission
word (a special code word K28.5 followed by 3 data code words). In case of Fiber Channel,
any malformed transmission word causes the symbol alignment to go out of lock based on
the un-lock count programmed.
Comma symbols are used for identifying the correct symbol boundary. Section – “Symbols
and Comma Character” introduces comma symbols and discusses on how they are used in
data output from 8b/10b encoder on the TX side of a SerDes. At the receiver end, the
incoming data is scanned for comma symbols. Once the comma symbol is found, the
deserializer resets the word boundary of the received data. The received data is continuously
scanned for the subsequent comma symbols.
24 UG028, July 1, 2014
Page 25
Deskew FIFO
The deskew block provides support for standards which require multiple lane bonding and
de-skewing of received data across multiple lanes. Lane bonding is required when the users
want to transmit data faster than is possible by using one serial link (lane). In such case, the
data is received must be aligned across the lanes. Deskew module within the SerDes takes
care of this.
UG028, July 1, 2014
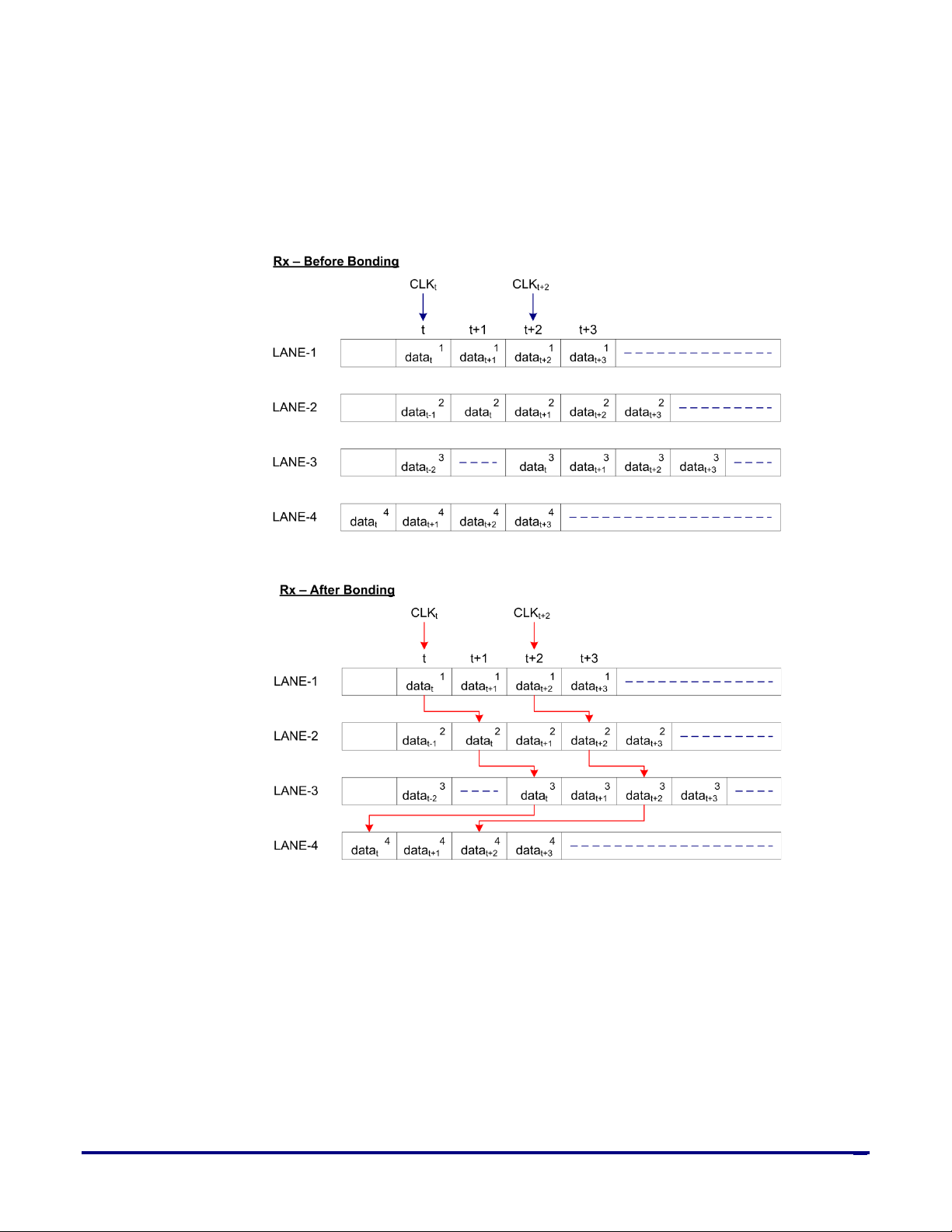
Figure 14: Operating principle of deskew technique
“Figure 14 - Operating principle of deskew technique” shows the operating principle of
deskew operation. In this figure, data is being sent using four lanes. On the receiver side,
before lane-bonding, we find that the data at time t+2on lane-1 is aligned with data at time
t+1 on lane-2 and so on. The deskew technique aims to align the data with respect to the clock
cycles. In other words, data at time t+2on lane-2 should be aligned with data at time t+2 on
the other lanes. The red lines for the clock at receiver end demonstrates this.
For lane bonding, all lanes should use the same reference clock and insert de-skew characters
at the same time on each lane. Skew between lanes is introduced by both active (CDR) and
passive (board) elements of the link. The deskew operation can result in some loss of data
when it aligns characters to the same clock cycle.
25
Page 26

Functional Description
The de-skew block uses a deskew FIFO on each lane. The writes to the deskew FIFO are
performed in the recovered clock domain for each lane. The read side of the deskew FIFO is
clocked by the clock from the initiator lane. The lanes are categorized as initiator and
followers. Any lane can be an initiator and skew is always calculated between the initiator
and each of follower lanes.
Once deskew is enabled, the skew between initiator and follower lanes are calculated
continuously by sensing deskew characters in the read side of the FIFO. The read threshold
for the FIFO needs to be programmed appropriately based on skew tolerance to avoid FIFO
under/over run. Once a deskew character is sensed, each lane starts a skew window equal to
the maximum skew allowed in the system. Based on how the lanes are skewed, the follower
lane is either lagging or leading and adjust the read clock cycles accordingly. Once the
initiator gets indication from all lanes of the bonding group that the skew calculation is over,
it declares that all lanes are aligned and asserts data valid for the down-stream logic. The
same data valid is used by the follower lanes to assert respective lane data valid. When the
initiator does not find such overlap of skew windows, it issues a reset to all FIFOs in the
bonding group and restarts the de-skew operation.
To summarize, the initiator lane generates various control signals for the follower lanes and
follower lanes send various status signals back to the initiators. Status signals are AND-ed
(e.g. for checking if the skew calculation completed in all lanes) or OR-ed (e.g. for checking if
any follower lanes window has not started), whereas control signals are used directly. These
signals go from one lane to another. The status and control signals are registered at time
intervals determined based on the number of lanes bonded
Lane-to-Lane Deskew Modes of Operation
The deskew module can work in three modes:
Manual Mode:
The rising edge of i_dskew_start will start one round of deskew operation. Lanes are
declared aligned either just after the deskew operation is completed or after an additional
check of a programmed number of aligned deskew characters in all bonded lanes at the same
time. The fabric needs to monitor received data for identifying any misalignment, and thus to
restart deskew operation. Infiniband uses manual mode of deskew operation.
Auto Mode:
The deskew module is always active. Once lanes are deskewed, all lanes will continuously
look for deskew characters in data read from the FIFO. The initiator should see deskew
characters on all lanes of the bonding group at the same time. The initiator looks for aligned
deskew characters on all lanes for a certain number of times based on the value programmed
in the register, and once detected the initiator declares bonded lanes aligned. Any time the
initiator finds deskew characters not aligned on all lanes, it starts an unlock count. If the
unlock count hits the value programmed in the register, the initiator declares that the lanes
are out of lock and re-starts the de-skew operation. While unlock count is incrementing, if the
initiator finds de-skew characters are aligned on all lanes again it starts decrementing the
unlock counter. This decrement can happen once in every ‘n’ (programmed in the register)
times when lanes have de-skew characters aligned to make sure the link has overcome error
conditions. If the unlock counter reaches zero, the link remains aligned.
26 UG028, July 1, 2014
Page 27
Symbol slip mode:
symbol_slip_up
symbol_slip_dn
Comments
0
0
Increment read pointer by 1
0
1
No increment 1 0
Increment read pointer by 2
1
1
Increment read pointer by 1
The deskew module does not actively remove skew across lanes. Each lane is controlled by
the fabric. Fabric continuously monitors incoming data and employ a mechanism to find out
the skew across lanes. Based on the calculation, it instructs each lane to adjust the read
pointer of FIFO. The read pointer can be incremented once by 0, 1 or 2 based on the
combination of rising edges on symbol_slip_up and symbol_slip_dn. Based on the skew
computed, the fabric may need to provide multiple transitions on symbol_slip_up and
symbol_slip_dn to get the required number of pointer adjustments.
Table 2: Symbol Slip Paramaters
Standards Supported by Deskew Module
The deskew module in Achronix SerDes has explicit support for XAUI and Infiniband. For
XAUI, align(||A||) characters are sent periodically as per section 48 in IEEE 802.3. For
Infiniband, training sequences (TS1/TS2) are used as deskew characters. Though each of
TS1/TS2 is 16 code words long, the de-skew module forms de-skew ordered set with COM
and four data symbols (D10.2). The distance (gap) between COM and data symbols should be
programmed to ‘d1 for Infiniband. In case of 10-bit data path, the max skew handled is 6bytes and for 20-bit max skew handled 2-bytes. For training in Infiniband, initially data valid
will be asserted to pass TS1/TS2/TS3 to fabric. Subsequently, data valid is removed when link
training is completed and the fabric decides to de-skew lanes bonded. Once the de-skew
operation is completed, data valid is asserted again.
UG028, July 1, 2014
Besides these two protocols, the user can use this module for deskew functions of any
protocols provided that the minimum spacing between de-skew characters are maintained.
Elastic FIFO (Elastic Buffer)
An elastic FIFO is used to synchronize the received data from the PMA recovered clock to a
system clock, typically the transmit clock. The Elastic FIFO also compensates for any
frequency offset between the recovered clock and the system clock. It compensates for the
frequency offset by adding or deleting pre-configured skip (or pad) characters from the
received data stream. The elastic FIFO in Achronix SerDes provides an indication that skip
(or pad) characters were added or deleted to the downstream logic. For PCIe, the elastic FIFO
also includes the appropriate status encoding to indicate add/delete operation.
The elastic FIFO can also be configured to be used as a simple phase compensation FIFO for
synchronizing data. When used as a phase compensation FIFO, it is left to the user to
guarantee that there is no frequency offset (jitter) between the read and write clocks.
27
Page 28

EFIFO Standards and Skip Characters
PCIe Gen3: To support PCIe Gen3, 4-bytes of skip are added at byte positions 4-7 from the
sync header associated with the skip ordered set. Skip removal happens from bytes 0-3 from
the sync header associated with the skip ordered set. Due to this particular rule of removal,
sync header and receive start block indications are delayed by 4-bytes.
PCIe Gen1/Gen2: For PCIe Gen1/Gen2, the skip ordered set is two 10-bit words – the elastic
buffer adds or deletes only the second word.
Fiber Channel: To support Fiber channel, 4-bytes of skip are added and deleted. The PCS
operates in 16-bit data-path mode at the fabric interface and 20-bit encoding internally.
XAUI: To support XAUI, the skip ordered set is one 10-bit word, which is added or deleted
by the elastic buffer.
GigE: For GigE, the skip ordered set is two 10-bit words – control followed by data. The
elastic FIFO adds or removes both of these two 10-bit words.
Other Standards: Besides these specific standards, the elastic FIFO can handle any generic
protocols in the similar line due to the programmable nature of SKIP and inverted SKIP
ordered set of length 2. The user has flexibility to include an alternate (mostly inverted) word
in the ordered set. Beyond two words skip ordered sets, only 4 words skip ordered sets can
be used, which are specific to fiber channel. The elastic FIFO generates the final data valid
from the PCS, which is used by the fabric to register data.
28 UG028, July 1, 2014
Page 29
EFIFO Operation
“
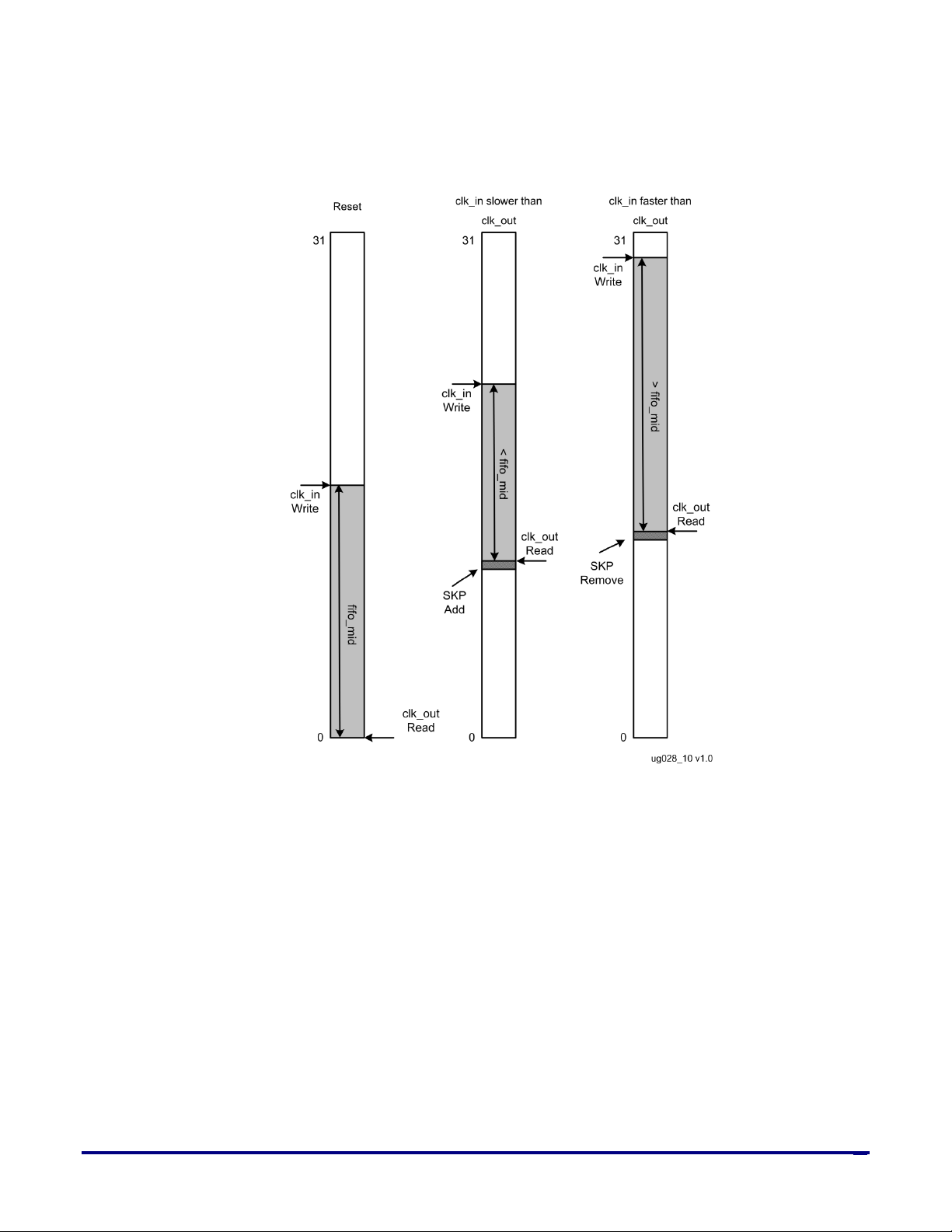
Figure 15: EFIFO SKP Addition/Removal
” illustrates the process of SKP addition/removal.
UG028, July 1, 2014
Figure 15: EFIFO SKP Addition/Removal
In “Figure 15: EFIFO SKP Addition/Removal” upon reset, the difference between the read
and write counters is equal to fifo_mid (half the size of the buffer; default 16).
If clk_in is operating at a lower frequency than clk_out, then the read operation is faster than
the write operation and the difference between the write and read counters will be less than
fifo_mid. In this case, to compensate for clk_in being slower, an SKP is added to the data
stream.
If clk_in is operating at a higher frequency than clk_out, then the read operation is slower
than the write operation and the difference between the write and read counters will be
greater than fifo_mid. In this case, to compensate for clk_out being slower, an SKP is
removed from the data stream.
29
Page 30
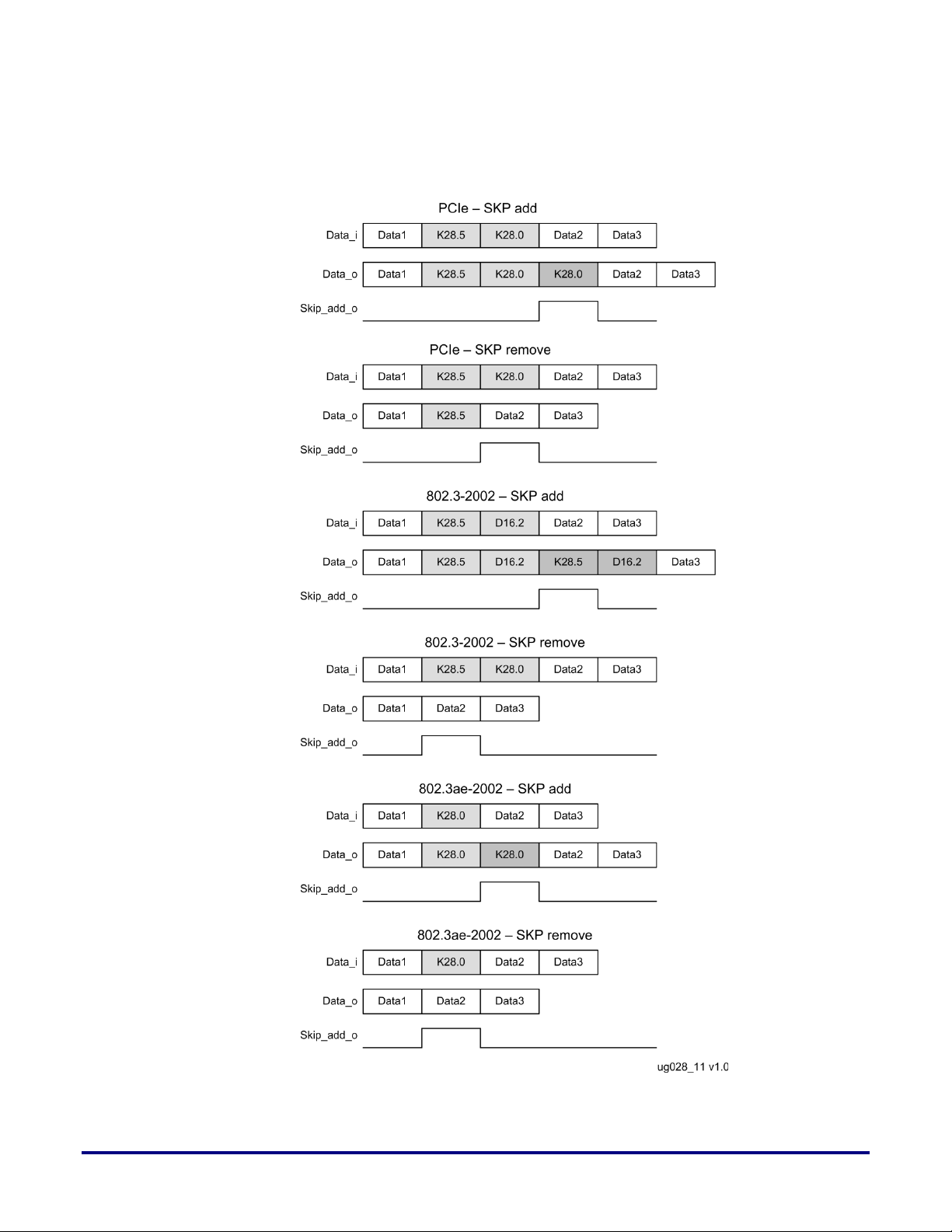
“Figure 16: EFIFO SKP Addition/Removal: PCIE, GigE (802.3) and XAUI (802.3)” illustrates
SKP additions and removals for PCIe, GigE (802.3), and XAUI (802.3ae). Note that in the
figure, data_i and data_o are not actually aligned, they are merely depicted so for clarity.
Figure 16: EFIFO SKP Addition/Removal: PCIE, GigE (802.3) and XAUI (802.3)
30 UG028, July 1, 2014
Page 31

Overflow/Underflow
Data Path width
Shift limit
20
83
16
79
10
73 8 71
If the difference between the write and read counters is greater than fifo_full, then the
overflow signal is asserted. If the difference between the write and read counters is less than
fifo_empty, then the underflow signal is asserted.
8b/10b Decoder
The 8b/10b decoder generates 8-bit code groups and 1-bit control from 10-bit encoded
(received) data. It uses the code group mapping specified in IEEE 802.3 clause 36. If the fabric
interface is a 16-bit data path, then two 8b/10b decoders are cascaded to produce 16-bit data
to the fabric. The decoder handles various error conditions. All error conditions are reported
per each byte lane.
The 8b/10b code allows 12 special (K) characters, but most standards generally support fewer
K characters and need the reserved K characters to be declared as code errors. So register
programming is possible to pre-configure 11 characters that can be declared as invalid for
deciding code error if seen in the receive data stream, and assuming that at least one special
character will be needed.
Any 10-bit code word that is not present in Tables 36-1, 36-2 of the IEEE 802.3-2005
specification shall be considered as invalid code word. In addition, 11 code words
corresponding to the K characters can be included (programmable) to be flagged as invalid
code words. If the 10-bit code word is present in Tables 36-1 or 36-2, but corresponds to the
wrong column (per current running disparity calculation), the wrong column indication is
asserted. Disparity and code errors are not mutually exclusive; however code error and
wrong column are mutually exclusive.
For XAUI and Gigabit Ethernet, a code error or disparity error will cause the error indication
to be propagated downstream. For PCIe, if a code error and disparity error are detected on
the same byte, the pipe_RXstatus is encoded to indicate a code error.
Bit Slider
The bit slider is a barrel shifter that can be used to control bit-wise skew from the fabric. This
feature can be used to implement any user specific algorithm for lane alignment and deskew. It can also be used in conjunction with the symbol slip mode of the de-skew FIFO to
attain a wide range of de-skew. The symbol slip mode can be used for coarse alignment (with
1 or 2 symbols shifting per request) and the bit slider can be used for finer alignment within a
symbol. The barrel shifter width is limits are shown in “Table 3: Shift Limit” below.
Table 3: Shift Limit
UG028, July 1, 2014
The MSBs is shifted to the location of the LSBs and the LSBs are discarded. There is a 6-bit
select control from the fabric to pick the active data to be driven to the fabric. For example, in
31
Page 32

the 20-bit mode of operation, the most significant 20-bits of data are placed on bits 19:0 of the
Port
Description
Primary input from SerDes. Used to select data window for
removing bit skew
bit_slider_enable
Register bit[1] @’h092 to enable bit-slider
word_mode
Register bit[3] @’h000 to select data path width – 1 word or 2 word
8bit_mode
Register bit[2] @’h000 to select type of encoding - 8(16) or 10(20)
barrel shifter and the least significant 20-bits are discarded. The 6-bit select control can select
a range of active bits, from [19:0] (for a select value of 0x00) to [82:63] (for a select value of
0x3F).
“Table 4: List of Important Interface Signals for bit slider”, provides a list of important
interface signals used for bit slider.
Table 4: List of Important Interface Signals for bit slider
bit_range_sel[5:0]
Interface Encapsulation
This block encapsulates the protocols before passing data to the fabric. Details on the
standards supported by Achronix FPGA can be found in Section –“PCS Interface”.
PCS Self Test Checker
When PCS self-testing feature is used, this block checks for the correctness of the receive data.
Details on this block are available in “PCS Test Pattern Generator” and “PCS Test Pattern
Checker”.
32 UG028, July 1, 2014
Page 33

PCS Interface
The PCS interface provides the general interface between the PCS and the core fabric. The
PCS supports the following interfaces:
Gigabit Ethernet Interface
The PCS in Achronix SerDes supports 10G Ethernet, compliant with section 36, 37 of IEEE
802.3. Functionalities implemented are PCS transmit, carrier sense, synchronization, receive,
and auto-negotiation.
The PCS transmit process is facilitated at both the GMII and PMA interfaces to the PCS. At
the GMII interface (fabric side), the PCS uses 8-bit synchronous data-path with packet delimiting, done by separate transmit control (TX_en, TX_err) and receive control signals
(RX_dv, RX_err). At the PMA interface, the PCS uses 10-bit data path, which uses 10-bit code
groups. Besides generating 10-bit code groups continuously based on GMII signals (TXd[7:0],
TX_dv, TX_err), transmit process also generates GMII signal col if reception is concurrent
with transmit. The transmit process also monitors auto-negotiation to determine whether it
needs to send data or reconfigure the link. As part of transmit process, the state machines
shown in Figures 36-15 and 36-16 of IEEE 802.3 are implemented. To enable carrier sense the
PCS generates an internal flag.
• Gigabit Ethernet Interface
• XAUI
• PIPE Interface
• 10G Ethernet Interface
The PCS Synchronization process determines whether the PMA is functioning reliably. The
PCS Synchronization process continuously accepts code-groups and conveys received codegroups to the PCS Receive process. For synchronization, a symbol alignment module is used.
For synchronization, the state machines shown in Figures 36-9 of IEEE 802.3 are
implemented.
The PCS Receive process continuously accepts code-groups. The PCS Receive process
monitors these code-groups and generates RXD <7:0>, RX_DV, and RX_ER on the GMII, and
the internal flag used by the Carrier Sense and Transmit processes. For synchronization, the
state machines shown in Figures 36-7 of IEEE 802.3 are implemented.
The PCS Auto-Negotiation process sets the xmit flag to inform the PCS Transmit process to
either transmit idles interspersed with packets as requested by the GMII or to reconfigure the
link. The PCS auto-negotiation process is specified in the state machine shown in Figure 37-6
of IEEE 802.3. As part of auto-negotiation, the PCS will advertise only as a 1G link full-duplex
partner. The following management registers are currently implemented:
a. Control register (Register 0)
b. Status register (Register 1)
c. AN advertisement register (Register 4)
d. AN link partner ability base page register (Register 5)
These management registers are accessible through SBUS i/f (P1). A MDIO-to-SBUS bridge
can be implemented in the fabric. The reset duration of these controllers is programmable
via register, and the max duration is defined as 0.5sec as per IEEE 802.3.
UG028, July 1, 2014
33
Page 34

XAUI
The PCS supports XAUI compliant with section 48 of IEEE 802.3. The Protocol block
implements the Transmit and Receive state machines as per Figures 48-6 and 48-9 of IEEE
802.3. For synchronization, de-skew and clock compensation operations, symbol alignment,
de-skew and elastic buffers in PCS are used. 8b/10b encoders and decoders are used for
handling 10-bit code groups.
When communicating with the XGMII (fabric side), the PCS uses in each direction 32 data
signals and 4 control signals. When communicating with the PMA, the PCS uses a 40-bit
code-group in the transmit direction and in the receive direction. Each set of 40-bit data
signals conveys four lanes of 10-bit code-groups. The 40-bit code-group signals are organized
into four lanes: the first PCS code-group is aligned to lane 0, the second to lane 1, the third to
lane 2, and the fourth to lane 3. Code-group alignment, lane-to-lane de-skew, and provision
for clock rate compensation are made possible by embedding special non-data code-groups
in the idle stream.
The PCS Transmit process continuously generates code-groups based upon the TXd [31:0]
and TXc [3:0] signals on the XGMII, sending them to the PMA service interface.
The PCS Synchronization process indicates whether the PMA is functioning dependably,
which can be determined without exhaustive error-rate analysis. The PCS Synchronization
process continuously accepts unaligned and unsynchronized code-groups from the PMA,
obtains 10-bit code-group synchronization, and conveys synchronized 10-bit code-groups to
the PCS de-skew process as per Figure 48-7 in IEEE 802.3.
The PCS de-skew process continuously accepts synchronized code-groups, aligns the codegroups to remove skew between the lanes introduced by the link, and conveys aligned and
synchronized code-groups to the PCS Receive process. At the end of the de-skew process, the
PCS will have successfully de-skewed and aligned code-groups on all PCS lanes. The deskew process always looks for non-aligned code-groups across 4-lanes and initiates de-skew
operations as per Figure 48-6 in IEEE 802.3.
Clock rate compensation is required when the received clock from the PMA and the clock on
which data is sent to fabric are different in terms of jitter. The PCS compensates by inserting
or deleting SKIP (||R||) characters in the encoded idle stream. Insertion and deletion is only
done after SKIP (||R||) is detected – not arbitrarily on any positions.
The Receive process operates in two modes as per Figure 48-9 in IEEE 802.3: date and idle
mode. In data mode, valid code-groups received are mapped to corresponding XGMII data
or control characters regardless of whether the control characters are valid XGMII control
characters. Invalid or error code-groups are mapped directly to XGMII Error control
characters. In idle mode, an idle code-group is translated to XGMII Idle control characters.
All code-groups are mapped on a lane by lane basis.
PIPE Interface
The PCS supports the PIPE interface compliant to the Intel PIPE 3.0 specification. It supports
a 10/20-bit data path for gen1/gen2 and 16-bit for gen3. Similarly, it supports 2.5G, 5.0G and
8.0G throughput on the PMA. For gen1/gen2, 8b/10b endec and gen3 128b/130b endec are
used. This interface allows the embedded PCIe MAC to configure the PMA and decide upon
the next course of action based on the status sent out by the PMA. Besides the functions
described in the PIPE interface specifications, it facilitates the MAC in setting up the receive
equalizer in the PMA. When the PCS is supporting PCIe/PIPE, lane de-skew is done by the
MAC and clock compensation is done by the elastic buffer in the PCS.
The PCS also supports a 128b/130b encoder, specifically targeted for PCIe gen3 (based on
draft 0.5 of the PCIe 3.0 specification). The interface is compliant to the PIPE 3.0 specification.
34 UG028, July 1, 2014
Page 35

The 128b/130b encoder is disabled on power up, and enabled when the rate bits coming from
PCIe Mode
PCLK
PMA Data Width
2.5 Gbps Gen1
250 Mhz
10 bits
2.5 Gbps Gen1
125 Mhz
20 bits
5.0 Gbps Gen2
500 Mhz
10 bits
5.0 Gbps Gen2
250 Mhz
20 bits
8.0 Gbps Gen3
500 Mhz
16 bits
the MAC are configured to 2’b10. The PCS layer support for PCIe gen3 also includes glue
logic to switch the PMA data width to 16-bit mode and programming final rate bits for PCIe
gen3 operation. “Table 5: PIPE Interface Paramaters” shows various supported combinations
of clocking speeds and data-widths.
Table 5: PIPE Interface Paramaters
UG028, July 1, 2014
35
Page 36

Clocking
“Figure 17: SerDes RX and TX clocks” gives an overview of the clocks inside the SerDes. The
PMA of a SerDes lane generates two clocks, a TX word clock synthesized from the reference
clock, and an RX word clock recovered from the incoming serial data stream. The frequency
of these clocks is the data rate divided by the word width. For instance, a 10Gbps data rate
with 20 bit data width results in a 500MHz clock. Since the TX and RX clocks are generated
separately, they must be designated as unrelated in the timing constraints. In the most basic
mode, these TX and RX clocks are used to clock the data in their respective directions, and
are brought into the FPGA fabric for use by the user design.
Because each SerDes lane has its own PMA to generate a TX clock and an RX clock, the clocks
of different lanes are unrelated to each other, and consequently there is no synchronization
between the data of different lanes. Some protocols distribute data over a group of SerDes
lanes to increase bandwidth; typically, the lanes in such a group must then be synchronized
to give the appearance of a single high-bandwidth data stream. To synchronize multiple
SerDes lanes, Lane Bonding is used. As the Figure illustrates, when Lane Bonding is enabled,
a single lane is designated as master, and its TX and RX clocks are used to clock all the lanes
in the group. The deskew FIFO is used to convert data from the recovered clock domain to
the master RX domain; see Section “Deskew FIFO” for more details.
Figure 17: SerDes RX and TX clocks
36 UG028, July 1, 2014
Page 37

Although each lane has its own clock output pins to the fabric, with lane bonding these are
all just route-throughs of the master clock: regardless of which clock output pins are used,
only one clock net is routed inside the fabric. This is an important feature of Lane Bonding,
because the FPGA fabric can only accommodate a limited number of distinct clocks. Lane
Bonding divides the number of distinct clocks inside the core by the size of the group. Note
that Lane Bonding is only possible when all lanes share the same reference clock, both at the
near end and at the far end.
An additional method of reducing the number of distinct clocks is to use the Elastic FIFO.
That FIFO can be used to convert data from the RX domain to the TX domain, thus reducing
the number of distinct clocks by half. In Elastic FIFO mode, the RX clock output to the fabric
is just a route-through of the TX clock: either clock pin can be used, and only a single net will
be routed inside the fabric. See Section “Elastic FIFO” for details of Elastic Buffer operation.
Elastic FIFO mode and Lane Bonding mode can be combined, reducing the number of clocks
to one for the entire bonded group.
As mentioned above, a 10Gbps data rate results in a 500MHz clock output to the user design
(or 625MHz for 16 bit words). For most designs, timing closure at such high clock speeds is
unrealistic. Because of that, the SerDes macro includes a “Wide Bus” feature, which divides
the clock frequency by two and doubles the data width. When the Wide Bus feature is
enabled, the TX and RX clock outputs from the macro to the user design are the divided
clocks, and the user design does not need to deal with the faster clock at all. However,
because the Wide Bus is implemented in the fabric, both the fast and divided clocks do occur
in the fabric, counting towards the maximum number of distinct clocks. The Wide Bus
feature can be combined with Lane Bonding and Elastic FIFO modes. See the Section “Design
Guidelines” for specifics on the number of distinct clocks that the fabric can support, and for
details of the Wide Bus feature.
UG028, July 1, 2014
37
Page 38

Debug and Test
The SerDes comes integrated with a wide range of debug and test features for excellent
coverage. The following features are provided:
• Seven different loopback modes
• Pseudo-Random Binary Sequence (PRBS) pattern generators and checkers on PMA
• User-defined pattern generator and checker in PMA and PCS.
Loopback Modes
The SerDes supports up to seven different loopback modes. The loopback modes can be
divided as PMA loopback and PCS loopback. Each of the PMA and PCS loopbacks has Near
end and Far-end loopback. Near End loopback loops back the data from transmit side to the
receive side while Far end loopback, loops back data from receive side to the transmit side.
1. PMA loopback mode
A. Near End
B. Far End
and PCS.
(i) TX to RX PMA Serial internal loopback – This loopback is serial transmit
to receive buffered loopback. Loops back the TX serializer output into the CDR
bypassing the IO drivers.
(ii) RX to TX PMA serial loopback - Transmits the untimed, partial equalized
RX serial data on the transmit IO pins.
(iii) RX to TX PMA parallel loopback – Loops back 20 bit receive data port to
20 bit transmit data port. This uses synthesized bit clock for transmit.
(iv) RX to TX PMA parallel loopback using recovered clock (Loop timing
mode) - Loops back 20 bit receive data port to 20 bit transmit data port. This uses
recovered clock (CDR) for transmit.
2. PCS loopback mode
A. Near End
(i) TX to RX PCS parallel loopback – Transmit data is looped back on the
receive path at the PMA interface.
B. Far End
(ii) RX to TX PCS parallel loopback – Receive data is looped back on the
transmit side at the fabric interface. This uses synthesized bit clock for transmit.
(iii) RX to TX PCS parallel loopback using recovered clock - Receive data is
looped back on the transmit side at the fabric interface. This uses recovered clock
(CDR) for transmit.
38 UG028, July 1, 2014
Page 39

PMA loopback modes:
Figure 18: PMA Loopback Modes
PCS loopback modes:
UG028, July 1, 2014
Figure 19: Looback modes
Please refer “Dynamic Read/Write of SerDes Registers (Through SBUS)” section to set
different loopback modes in the user design using ACE macro ACX_SERDES_REG_CTRL
39
Page 40

PMA Test Pattern Gen er ator
Bus Width
PRBS Pattern Available
PRBS-7
1+x6+x7
PRBS-23
1+x18+x23
PRBS-31
1+x28+x31
Bus Width
PRBS Pattern Available
PRBS-7
1+x6+x7
PRBS-15
1+x14+x15.
PRBS-20
1+x3+x20
PRBS-23
1+x18+x23
PRBS-31
1+x28+x31
The PMA supports a built in transmit data pattern generator that can be used for transmit
characterization. The test pattern generator can transmit PRBS patterns and user defined
patterns. The PRBS patterns supported are shown in “Table 6: PRBS Patterns in PMA” below:
Table 6: PRBS Patterns in PMA
The transmit pattern generator can generate user defined pattern by configuring control
registers. The user defined pattern can be a 40 bit memory pattern.
PMA Test Pattern Checker
The PMA Test pattern checker on the receive data path can be used to check all the standard
data patterns and user defined patterns by enabling the self test checker. The standard data
patterns include the PRBS patterns as described in Table above. The user defined pattern is a
40-bit memory pattern checker. The PRBS transmitter and receiver are enabled by selecting
the loopback modes described in section “Dynamic Read/Write of SerDes Registers (Through
SBUS)”.
PCS Test Pattern Generator
The PCS can be programmed to transmit test pattern data instead of user provided transmit
data coming from fabric interface. The test pattern generator is used to check the quality of
the serial link and supports various standard patterns. The test pattern generator can
transmit PRBS patterns and user defined patterns. The PRBS patterns currently supported are
shown in “Table 7: PRBS Patterns in the PCS”.
PRBS Generator
Various PRBS patterns can be generated by the transmit block which are summarized in
“Table 7: PRBS Patterns in the PCS”.
Table 7: PRBS Patterns in the PCS
40 UG028, July 1, 2014
Page 41

The transmit pattern generator can optionally transmit user defined patterns instead of PRBS
patterns, configured through the control registers. Two sets of user defined patterns (up to
40-bits each) can be configured. The user can decide to send a single 40-bit pattern or two
alternate 40-bit patterns.
The transmit test pattern generation supports two modes of operation -
• Non-framed transmit mode
• Framed transmit mode
In both modes, the shift registers used for PRBS generation should be initialized to a non-zero
value.
In the non-framed transmit mode, the user has the option of selecting one of the supported
PRBS patterns or the user defined pattern. When reset is released, the pattern generator
continuously transmits the selected pattern.
In the framed transmit mode, the user can select to transmit one or both user defined patterns
initially, followed by one of the PRBS patterns. The switch over from user defined pattern to
PRBS pattern is controlled by programming register. The PRBS patterns can also be
interspersed with the user defined patterns.
PCS Test Pattern Checker
The test pattern checker on the receive data-path supports checking all PRBS patterns that
can be generated from the transmit side. The receive pattern checked also has two operating
modes:
• Non-framed mode
• Framed mode
In the non-framed mode of operation, the test pattern checker implements self-synchronizing
PRBS checkers. If a user defined pattern (UDP) is being transmitted in non-framed mode, the
symbol alignment block needs to be setup to achieve byte lock (to the first byte of the
repetitive UDP). The test pattern checker should start checking for errors after symbol
alignment block has indicated that byte lock has been achieved.
If a PRBS pattern is being transmitted, then the test pattern checker is self-synchronized to
the incoming data. Once the checker locks to the incoming data, it can track any errors with
respect to incoming data.
In the framed mode of operation, the receive pattern checker will use the same seed as the
transmit pattern generator for checking the PRBS patterns. The symbol alignment block
needs to be setup to lock for the initial UDP. The test pattern checker monitors the locked
data and detects the switch over from the initial pattern to the PRBS pattern and triggers the
receive side PRBS checking.
In non-framed PRBS mode, the test pattern checker increments an error counter for every
received data that did not match the expected pattern after a window of wait period has
expired.
UG028, July 1, 2014
41
Page 42

Latency
1.
8-bit
28 UI
2.
10-bit
33 UI
3.
16-bit
36 UI
4.
20-bit
43 UI
This section presents the worst case latency for PMA and PCS blocks.
PMA Latency
The following equation calculates the worst-case latency for the Tx-datapth assuming the
case of first word in and last bit out:
= _ + 2.5 _ +(_ 1) + 500,
where analog latency is explained below and 500 ps accounts for internal analog delay and
digital clock newtowrk latency.
The worst-case latency for the Rx-datapath can be calculated by the following equation
considering the case of first bit in and first word out:
= 5.5 + 2.5 _ +(_ 1) + 500 ,
where 500 ps accounts for internal analog delay and digital clock newtowrk latency.
The analog latency is a function of the databus-width as well and can be estimated using
“Table 8: Analog latency as a function of databus width” below.
Table 8: Analog latency as a function of databus width
# Databus Width Analog Latency
As an example, for 20-bit databus width, the worst case latency for Tx and Rx datapath can
be estimated as follows:
= 43 + 50 + 19 + 500 = 112 + 500, and
= 5.5 + 50 + 19 + 500 = 73.5 + 500
Worst case values are presented in “Figure 20 Worst-case latency across PMA and PCS (in
terms of clock-cycles)”.
PCS Latency
There are two modes of using PCS in Achronix SerDes:
1. PCS Enabled: All or selected PCS blocks can be enabled. Each block will introduce it’s
own latency in datapath. Even when selected blocks are disabled in this mode, data
(transmit and receive) will travel through the PCS components while bypassing them, as
shown in “Figure 6: - PCS Transmitter Block Overview”.
2. PCS Disabled: In this case, all PCS blocks are disabled. This mode introduces a latency of
2 clock-cycles.
42 UG028, July 1, 2014
Page 43

“Table 9: Latency across the PCS blocks” presents the latency experienced by datapath in
Latency experienced by datapath
PCS Enabled
PCS Bypassed
Polarity bit reversal
symbol swap 0
2.
8b/10b Encoder
Transmit
2
Not applicable
Polarity bit reversal
symbol swap 1
4.
8b/10b Decoder
Receive
2
Not applicable
Symbol Alignment
Module
6.
Deskew Module
Receive
FIFO_Threshold + 5
Not applicable
no_of_lanes_bonded/4*
8.
Other
2
Total Latency
13 (max)
2
* For special case of lane-bonding
these two modes. The worst case latency is presented in in “Figure 20 Worst-case latency
across PMA and PCS”
Table 9: Latency across the PCS blocks
# PCS Module Data Path
1.
3.
5.
7. EFIFO Module Receive
Transmit 0 Not applicable
Receive 0 Not applicable
Receive 2 Not applicable
FIFO threshold + 7 +
Not applicable
UG028, July 1, 2014
43
Page 44

Figure 20 Worst-case latency across PMA and PCS (in terms of clock-cycles)
44 UG028, July 1, 2014
Page 45

Configurations S uppor te d
Suggested
(MHz)
8b/10b
8b/10b
128b/130
b
GigE
CX)
SGMII
1.25 1 125
8
8b/10b
Yes
No
XAUI
3.125
4
156.25
8
8b/10b
Yes
No
156.25,
161.1328
10GBASE-R
(802.3ae)
156.25,
161.1328
10GBASE-KR
(802.3ae)
156.25,
161.1328
CAUI/XLAUI
(802.3ae)
156.25,
161.1328
SPI5
3.125
1:N
156.25
8/10/16/20
No
No
No
9.1-
10.3125
SFI-S
11.1
1:N
Variable
20
No
No
No
4.976–
6.375
9.95–
11.2
106.25
8b/10b
2GFC
106.25
8b/10b
4GFC
106.25
8b/10b
8GFC
106.25
8b/10b
10GFC
10.52
1
106.25
16
8b/10b
Yes
No
622.08,
155.52
Table 10:
Standard
PCI
Express
Gigabit
Ethernet
10 Gigabit
Ethernet
Supported Transmitter (TX) Features
Variation
Gen1 2.5 1/4/8 100 8/16
Gen2 5.0 1/4/8 100 8/16
Gen3 8.0 1/4/8 100 16
(1000BASE-
XFI 10.3125 1
Data
Rates
(Gbps)
1.25 1 125 8
10.3125 1
10.3125 1
Numb
er of
Lanes
Reference
Clock
Parallel Data
Width (Bits)
20
20
20
Encoder PBR
Yes Beacon
Yes Beacon
Yes Beacon
8b/10b
No
No
No
Yes No
Yes No
Yes No
Yes No
Out-of-
Band
Interlaken Interlaken
SFI-5.1
OIF
Fiber
Channel
SFI-5.2
CEI 6G
CEI 11G
1GFC 1.0625 1
10.3125 10/4
3.125 -
10.3125
2.488-
3.125
2.125 1
4.25 1
8.5 1
4-12 Variable 20 No Yes No
1:N Variable 8/10/16/20
1:N Variable 20
1:N Variable 16/20
1:N Variable 20
20
8
8
16
16
No
No
No
No
No
Yes No
No No
No No
Yes No
Yes No
Yes No
Yes No
Yes No
Yes No
UG028, July 1, 2014
SONET OC-12 0.622 1
8/10
No
Yes No
45
Page 46

Suggested
(MHz)
622.08,
155.52
622.08,
155.52
622.08,
155.52
SATA-1
1.5
1
Variable
8/10
8b/10b
No
Yes
SATA-2
3.0
1
Variable
8/10/16/20
8b/10b
No
Yes
8b/10b
8b/10b
8b/10b
8b/10b
Serial Rapid
I/O – Gen1
1.25/2.5/
3.125
Serial Rapid
I/O – Gen2
5.0/6.12
5
E-PON
(802.3av)
E-PON
(802.3av)
1.25/2.5/
10
2.5 / 5.0
/ 10.0
614.4 –
9830.4
3.072
Standard
Variation
Data
Rates
(Gbps)
Numb
er of
Lanes
Reference
Clock
Parallel Data
Width (Bits)
Encoder PBR
Out-of-
Band
OC-24 1.244 1
OC-48 2.48832 1
OC-192 9.95 1
SATA
SATA-3 6.0 1 Variable 16/20
SAS-1 1.5/3.0 1 Variable 8/10/16/20
SAS
Serial
Rapid I/O
InfiniBand InfiniBand
SAS-2 6.0 1 Variable 16/20
SAS-3 12.0 1 Variable 20
8/10
8/10
20
1 Variable 8/10/16/20 8b/10b No No
1 Variable 16/20 8b/10b No No
1 Variable 8/10/16/20 No No No
1 100 8/16 8b/10b Yes No
No
No
No
Yes No
Yes No
Yes No
No Yes
No Yes
No Yes
No Yes
CPRI v5.0
CPRI v6.0 10.317 1 122.88 20
OBSAI OBSAI
1.536 /
1 122.88 8/16
1 153.6 8/16
8b/10b Yes No
No Yes No
8b/10b Yes No
46 UG028, July 1, 2014
Page 47

XFI
10.3125
No
Yes
Yes
No
No
No
No
10GBASE-R
(802.3ae)
No
10GBASE-KR
(802.3ae)
2.488-
3.125
9.1-
10.3125
4.976–
6.375
9.95–
11.2
1GFC
1.0625
Yes
Yes
Yes
Yes
Yes
8b/10b
No
2GFC
2.125
Yes
Yes
Yes
Yes
Yes
8b/10b
No
4GFC
4.25
Yes
Yes
Yes
Yes
Yes
8b/10b
No
8GFC
8.5
Table 11: Supported Receiver (RX) Features
Standard
Variations
PCI Express Gen1
Gen2
Gen3
Gigabit
Ethernet
GigE
(1000Base-
CX)
SGMII
10 Gigabit
XAUI
Ethernet
Data
Rates
(Gbps)
2.5
5.0
8.0
1.25
1.25
3.125
Symbol
Align
Yes
Yes
Yes
Yes
Yes
Yes
PBR
Yes
Yes
Yes
Yes
Yes
Yes
Transition
Density
Checker
Yes Yes No 8b/10b No
Yes Yes No 8b/10b No
Yes
Yes Yes No 8b/10b No
Yes Yes No 8b/10b No
Yes Yes Yes 8b/10b No
Clock
Compen
sation
(EFIFO)
Yes No
Lane
De-
skew
Decoder
128b/13
0b
10.3125 Yes Yes Yes Yes No No
Bit
Slide
r
No
Interlaken
OIF
Fiber
Channel
CAUI/XLAUI
(802.3ae)
Interlaken
SPI5 3.125
SFI-5.1
SFI-5.2
SFI-S 11.1
CEI 6G
CEI 11G
10.3125 Yes Yes Yes Yes No No No
10.3125 Yes Yes Yes Yes No No No
3.125 -
10.3125
No
No
No
No
No
No
No
Yes Yes No No
No
No
No
No
Yes
Yes
No No No No Yes
No No No No Yes
No No No No Yes
No No No No Yes
Yes Yes Yes 8b/10b No
Yes Yes Yes 8b/10b No
No
No
UG028, July 1, 2014
47
Page 48

10GFC
10.52
Yes
Yes
Yes
Yes
Yes
8b/10b
No
OC-12
0.622
Yes
Yes
Yes
No
No
No
No
OC-24
1.244
Yes
Yes
Yes
No
No
No
No
OC-48
2.48832
Yes
Yes
Yes
No
No
No
No
OC-192
9.95
Yes
Yes
Yes
No
No
No
No
SATA-1
Yes
No
No
No
8b/10b
No
SATA-2
Yes
No
No
No
8b/10b
No
SATA-3
Yes
No
No
No
8b/10b
No
8b/10b
SAS-2
6.0
Yes
No
No
No
No
8b/10b
No
SAS-3
12.0
Yes
No
No
No
No
8b/10b
No
1.25/2.5
/3.125
5.0/6.12
5
E-PON
(802.3av)
E-PON
(802.3av)
1.25/2.5
/10
2.5 / 5.0
/ 10.0
614.4 –
9830.4
CPRI
v6.0
10.317
1.536 /
3.072
Standard
SONET
Variations
Data
Rates
(Gbps)
Symbol
Align
PBR
Transition
Density
Checker
Clock
Compen
sation
(EFIFO)
Lane
De-
skew
Decoder
Bit
Slide
r
SATA
SAS-1 1.5/3.0 Yes No No No No
SAS
Serial Rapid
I/O
Infiniband Infiniband
CPRI v5.0
OBSAI OBSAI
Gen1
Gen2
1.5
3.0
6.0
No
No
No
No
Yes No No No Yes
Yes No No No Yes
No No No No No
Yes Yes Yes Yes Yes 8b/10b No
Yes Yes Yes Yes No
Yes Yes Yes Yes No
8b/10b
8b/10b
No
8b/10b
8b/10b
Yes
Yes
Yes
No
No
48 UG028, July 1, 2014
Page 49

Design Flow: Creating a SerDes Design
In this chapter, step-by-step instructions for creating a SerDes design are presented:
1. Generation of SerDes wrapper using ACE GUI
2. Design of top-level RTL to instantiate the SerDes wrapper created in step 1.
3. Definition of placement and timing for the SerDes.
4. Design guidelines
This chapter starts with a simple design and presents step-by-step instructions for creating
this design. Later section presents the additional/reduced steps required to prepare the
designs with special features.
The Achronix SerDes reference design Speedster22i_SerDes_1lane_10gbps_PCS_bypass_
RD002 is a variant of the designs presented in this chapter and contains the code base used
for using Achronix SerDes IP.
The first simple design presented in this chapter is named as simple_serdes_design. This is a
single-lane SerDes design with the properties listed below.
Design name : simple_serdes_design
Objective : Send data from fabric to SerDes and read-back data using internal loopback.
Data rate : 10.3125 Gbps
Standard : Generic
Number of lanes : 1
Placement : South lane# 8
Ref. clock : 156.25 Mhz
Data width : 40
PCS blocks : Enabled
8b/10b encoder
8b/10b decoder
Symbol alignment: Automatic mode
Note: clock compensation (EFIFO) not used.
UG028, July 1, 2014
The directory structure is not a hard requirement and the user may change it.
structure for the baseline sample design is shown below; the reference
Speedster22i_SerDes_1lane_10gbps_PCS_bypass_RD002 uses a similar directory structure.
simple_serdes_design (root for this design)
|- src
|----- ace (will contain the project file for generation of wrapper as well as the acegenerated wrapper, placement and timing constraint files)
|----- constraints (will contain the user-defined placement and timing constraint files)
|----- tb (will contain the user-defined testbench and other related files)
|----- rtl (will contain the user-defined top-level rtl for the design)
design
The directory
Generating SerDes Wrapper using ACE GUI
This section will focus on creating SerDes wrapper using ACE GUI. The generated files will
be stored in simple_serdes_design/ace folder. ACE will generate the RTL for SerDes wrapper
as well as placement and timing constraint files. The SerDes wrapper module is instantiated
in top-level module; the ace-generated placement and timing constraint files are used to
prepare design-specific constraint files.
49
Page 50

The user is assumed to have basic understanding of using ACE GUI. The user may refer to
the online demo as well as the ACE documentation for different aspects of using the ACE
GUI.
Single-Lane Serdes Wrapper
To generate a SerDes wrapper from ACE, the user needs to invoke ace following the
instructions detailed in the ACE documentation. SerDes wrapper is created from the IP
Configuration perspective. To access this perspective, from the menu-bar of ACE GUI, the
user needs to select Windows, then Open Perspective and finally IP Configuration.
Alternatively, the IP configuration perspective can be opened by clicking the toolbar button,
shown in Figure 21: Opening IP Configuration Perspective.
Figure 21: Opening IP Configuration Perspective
Sub-Windows: The IP configuration perspective contains the following sub-windows, the
arrangement of which may depend on the last saved setting for ACE GUI:
• Main Window: The middle-top window. This will contain the entry boxes that are
used for defining the SerDes configurations.
• IP Libraries: Displays a list of the available IP libraries.
• TCL Console: Displays the console messages, including warnings and errors.
• IP Problems: Displays any invalid setting that you may have used while generating
the wrapper.
• Outline: Outline of the IP that are being generated. Wrapper for any IP will have
multiple pages for user-entries. Clicking on a topic listed in Outline window, the user
can go to the corresponding page.
• IP Diagram: Connection diagram for the IP block. For SerDes design, it will show the
connection diagram for the SerDes.
50 UG028, July 1, 2014
Page 51

To generate a SerDes wrapper, the user will need to double click on the link 12G SerDes in IP
Libraries window. This will bring up the window for creating new IP (SerDes) configuration
as shown in Figure 22: New IP Configuration Window.
Tip: The windows listed above can be resized and moved around like any other GUI based
applications. The windows can also be docked into ACE-GUI or undocked from ACE GUI.
Figure 22: New IP Configuration Window
For the current example design, a new project simple_serdes_design.acxip is created in
simple_serdes_design/src/ace folder. The user can click on the button Browse to select a
destination folder and type the name of the project (.acxip file) in the File name box. Clicking
on Finish on this window will create the project and the main window will be populated, as
shown in Figure 23: New IP Configuration Window- Overview Page.
UG028, July 1, 2014
51
Page 52

: Outline Window
Figure 23: New IP Configuration Window- Overview Page
The user will now have the Overview page in the main window with the options for entering
design parameters. The Outline and IP Diagram windows are also populated at this point, as
shown in “Figure 24: Outline Window” and “Figure 25: IP Diagran Window”.
Figure 24
Figure 25: IP Diagran Window
52 UG028, July 1, 2014
Page 53

Overview Section:
Entry field
Purpose
Available Options
Choice made
Defines the Achronix
simple_design targets
• XAUI
LaneLinx
Initially, the main window in the middle will contain the Overview page as shown in Figure
26: New IP Configuration Window – Populating Overview Page.
UG028, July 1, 2014
Figure 26: New IP Configuration Window – Populating Overview Page
The entry fields and the available options are listed in Table 12: Entry fields for Overview
page. This table also presents the choices that are made in Overview page (based on design
properties listed in “Table 12: Entry fields for Overview page”).
Table 12: Entry fields for Overview page
Target Device
Standard
device that
Standard used by the
design
• AC22iHD1000-F53
• AC22iHD1000-F45
• SpeedLinx
• Generic
• Interlaken
•
AC22iHD1000-F53
Generic
53
Page 54

Entry field
Purpose
Available Options
Choice made
Number of Lanes
Number of lanes used
by the design
TX data rate for the
12 options ranging
from 1.0265 to 11.31*1
RX data rate for the
TX Data Rate.
18 options ranging
typical protocols.
Disconnect
120
• Disconnect
• 120
Defines the number of
SerDes interface
16
20
Whether the SerDes
TX or both.
• RX only
• TX and RX
True
more than 4.
Placement:
• North
1 to 12. 1
TX Data Rate (Gbps)
RX Data Rate (Gbps)
Ref. Clock (MHz)
RX Termination
TX Termination
Data Width
design
design is currently
disabled. ACE GUI
makes it equal to the
*1 *3
Reference clock for
SerDes PLL’s.
Termination resistance
used for Receive Path
Termination resistance
used for Transmitter
Path
data bits used by the
from 60MHz to 350
MHz, including the
reference frequency for
*1
•
• 85
• 100
•
• 85
• 100
•
• 20
10.3125
156.25 MHz
100
100
Operating Mode
Enable Channel
Bonding
Chip Edge
will be used for RX or
Whether the design
uses bonded lanes
Defines the location of
the SerDes lane used.
• TX only
•
• False
The check-box is
enabled only when the
design uses multiple
lanes. The user must
use lane-bonding if
number of lanes is
• South
Implies the North and
South sides of Achronix
*2
FPGA
TX and RX
Not applicable for
single-lane
simple_serdes_design
North
54 UG028, July 1, 2014
Page 55

Entry field
Purpose
Available Options
Choice made
Achronix FPGA has 64
SerDes lanes, 32 each
on North and South
sides. When
SerDes Lanes The specific lane used.
North/South selected
from Chip Edge combo-
box, option is given for
each of the 32 lanes on
corresponding side.
*2
8
*1 The users may not use any combination of (a) TX (RX) data rate and (b) reference clock frequency.
This is due to the constraint that the Voltage Controlled Oscillator (VCO) clock rate derived from the
TX and RX data rates must integer multiple of the ref clock frequency. If the user’s choices do not
comply with this constraint, the error will be reported in IP problems window, as shown in Figure 27:
Issues with Setting TX/RX data rate and reference clock frequency
*2 Refer to the Chapter-“Overview” of this document for further details on the locations of SerDes
lanes in an Achronix FPGA.
*3 The user also needs to use identical values for reference clock frequency for both TX and RX.
Note: As the user goes through the ACE GUI, some entry fields may become disabled based
on the earlier choices. Furthermore, some parameters become fixed (and unavailable for
change) based on the earlier choices. For instance, the Enable Channel Bonding check-box is
disabled for the simple_serdes_design that uses a single lane. “Figure 27: Issues with Setting
TX/RX data rate and reference clock frequency” further emphasizes this. In this Figure, when
the user chooses XAUI as the SerDes standard, all the fields except for termination and
operating mode are set at pre-defined values and become unavailable for changes.
UG028, July 1, 2014
55
Page 56

Figure 27: Issues with Setting TX/RX data rate and reference clock frequency
56 UG028, July 1, 2014
Page 57

Figure 28: Unavailable Fields
As “Figure 28: Unavailable Fields” shows Some fields become unavailable based on earlier
choices made by the user. In this case, the user chooses ‘XAUI’ as the standard (not related to
simple_serdes_design)
Note: For the data-rate above 5.0 GBPS (including 10.3125 GBPS), the ACE GUI eventually
uses the wide-bus architecture and generates a wrapper that transmit/receive 40-bit data
from/to fabric. A later section of this chapter further details the wide-bus architecture.
Section on PMA Settings:
Clicking Next button on Overview page will bring up the section on PMA Settings. The first
page for PMA Settings is shown in “Figure 29: PMA Settings Window – First page”.
Alternatively, the user can click on PMA Settings on the Outline window of “Figure 24:
Outline Window”.
UG028, July 1, 2014
57
Page 58

Figure 29: PMA Settings Window – First page
The first page of the PMA Settings section gives the options to enter lane-specific PMA
settings. This is not relevant to the current design since it uses a single SerDes lane. However,
for completion, “Figure 30: Outline Window, When Lane-Specific PMA Settings are Enabled”
shows the Outline sub-window when the user enables lane-specific RX PMA Equalization
and lane-specific RX PMA PLL.
For the single-lane simple_serdes_design, the PMA Settings section consists of the following
four sub-sections and the corresponding list is displayed in Outline window (top-right subwindow in “Figure 30: Outline Window, When Lane-Specific PMA Settings are Enabled”):
1. RX PMA Equalization
2. RX PMA PLL
3. TX PMA Driver and
4. TX PMA PLL
The user can browse through these sub-sections by clicking Next buttons or by selecting a
page from the Outline window.
58 UG028, July 1, 2014
Page 59

Entry field
Purpose
Available Options*
Choice made
• Disconnected
-1.3 dB
• -2.94 dB
5.21 dB
Figure 30: Outline Window, When Lane-Specific PMA Settings are Enabled
RX PMA Equalization
This page allows the user to change the PMA equalization settings on the receive path. The
entry fields and the available options are listed in “Table 13: RX PMA Equalization”. This
table also presents the choices that are made for the current design: simple_serdes_design.
Note: All analog settings in “Table 13: RX PMA Equalization” and the tables to follow are
provided for reference only. For challenging physical links, the equalization settings need to
be tuned by the user.
Table 13: RX PMA Equalization
• -18.1 dB
• -12.2 dB
• -8.7 dB
• -6.2 dB
• -4.3 dB
• -2.7 dB
•
-18.1 dB
(default)
Low Freq AGC
Gain
Automatic Gain Control (AGC)
to make the SerDes suitable
over a range of signal levels
UG028, July 1, 2014
High Freq AGC
DC Gain
Control DC Gain of High
Frequency RX AGC
• -1.3 dB
• 0.332 dB
• 1.97 dB
• 3.6 dB
•
-2.94 dB
(default)
59
Page 60

Entry field
Purpose
Available Options*
Choice made
High Freq AGC
32 options ranging from
Max 31: Boost 22.6dB
• 105 MHz
808 MHz
• No pulse shaping tap
-3.10 dB
DFE N-1 Tap
(mV)
(mV)
DFE N-3 Tap
(mV)
DFE N-4 Tap
(mV)
RX User Control
From Fabric
• False
AC Boost
Control AC boost of High
frequency AGC
0.4 dB to 18.3 dB
Min 0: Boost 0.7dB
7.8 db (default)
DFE Pulse-
shaping Tap 3dB
Freq
DFE Pulse-
shaping Tap
Gain
Gain Control
DFE N-2 Tap
Gain Control
Gain Control
3dB Frequency of Pulse-Shaped
Analog
Decision Feedback Equalizer
used to
deal with channel loss
Tap gain of Pulse-Shaped
Analog
Decision Feedback Equalizer
used to
deal with channel loss
Additional DFE taps to
equalize channel discontinuities
Additional DFE taps to
equalize channel discontinuities
Additional DFE taps to
equalize channel discontinuities
• 179 MHz
• 281 MHz
• 391 MHz
• 494 MHz
• 567 MHz
• 663 MHz
•
• -0.38 dB
• -0.78 dB
• -1.20 dB
• -1.63 dB
• -2.09 dB
• -2.58 dB
•
-59.99 mV to +59.99 mV at
8.57 mV interval
-49.98 mV to +49.98 mV at
7.14 mV interval
-39.97 mV to +39.97 mV at
5.71 mV interval
105 MHz
(default)
No pulse
shaping tap
(default)
0 (default)
0 (default)
0 (default)
Gain Control
Additional DFE taps to
equalize channel discontinuities
-29.96 mV to +29.96 mV at
4.28 mV interval
*1
• True
0 (default)
False (default)
*1 If True is selected, the ACE GUI will add two input ports to the wrapper RTL. This change is
reflected in IP Diagram sub-window by the two additional ports: ch0_i_pma_RXeqlut[32:0] and
ch0_i_pma_RXeqlut_str.
* Available options listed here are the current ones based on characterization data. These values are
subject to change.
RX PMA PLL
This page allows the user to configure the PMA PLL settings on the receive path. The entry
fields and the available options are listed in “Table 14: RX PMA PLL Settings”. This table also
presents the choices that are made for the current design: simple_serdes_design.
60 UG028, July 1, 2014
Page 61

Table 14: RX PMA PLL Settings
Entry field
Purpose
Available Options
Choice made
Controls the frequency accuracy
detection in the CDR
• True
RX PPM
User-controlled
CDR switch
threshold (ppm) for lock
Whether the user wants to use a
switch for clock data recovery
Text-box entry. The user
may enter any value.
• False
2000 (Default)
False (Default)
UG028, July 1, 2014
61
Page 62

TX PMA Driver
Entry field
Purpose
Available Options
Choice made
952
• 1331
Defines the total number of
driver
Defines the total number of
first pre-cursor (C-1) tap.
Defines the total number of
Defines the total number of
second post-cursor (C+2) tap.
• 31 ps
• 170 ps
TX User Control from
Fabric
True
False
This page allows the user to configure the transmit driver settings on PMA.. The entry fields
and the available options are listed in “Table 15: TX PMA Driver Settings”. This table also
presents the choices that are made for the current design: simple_serdes_design.
Table 15: TX PMA Driver Settings
•
• 1024
• 1094
• 1163
• 1227
• 1283
1331 (Default)
Transmit Amplitude
(mVdiff-pkpk)
Transmit Amplitude control
signal. Used to define the
full-scale maximum swing of
the driver.
Cursor Level N
Per-Cursor Level N+1
Post-Cursor Level N-1
Post-Cursor Level N-2
Slew Rate TX driver Slew Rate control
driver units allocated in the
driver units allocated to the
driver units allocated to the
first pre-cursor (C+1) tap.
driver units allocated to the
Text field to enter any
value
Text field to enter any
value
Text field to enter any
value
Text field to enter any
value
• 33 ps
• 68 ps
•
•
21 (Default)
0 (Default)
4 (Default)
0 (Default)
31 ps (Default)
False (Default)
This page also lists additional TX PMA driver related information (to facilitate user-choices):
• Maximum Bit Amplitude (mVpp): 1173
• Back-Porch Bit Amplitude (mVpp): 861
62 UG028, July 1, 2014
• Preshoot Level (dB): 0.00
• De-emphasis Level (dB): -2.69
TX PMA PLL
This page allows the user to configure the PMA PLL settings on the transmit path. There is
one entry field in this page for simple_serdes_design, as listed in “Table 16: TX PMA PLL
Settings”:
Page 63

Table 16: TX PMA PLL Settings
Entry field
Purpose
Available Options
Choice made
Configure the PPM difference
assert PLL lock status signal
TX PPM
between reference clock and
divided down PLL clock to
Text-box entry. The user
may enter any value.
1000 (Default)
Section on PCS Settings:
The user can reach the PCS Settings section by browsing through the pages related to the
PMA Settings section. Alternatively, the user may reach this section by clicking the PCS
Settings link on the Overview window. The pages belonging to the PCS Settings section
allow the user to define the PCS-specific settings. Different components of the SerDes PCS
block are explained in Chapter – “PCS Blocks in Transmitter (TX) Data path”.
The first page of PCS Settings section is shown in “Figure 31: PCS Settings Window – First
page”. This page allows the users to choos lane specific PCS properties for a multi-lane
design. For the current single-lane design, these options are not relevant.
Figure 31: PCS Settings Window – First page
Clicking Next button on the first page will bring up the page for RX PCS Settings. This page
with default settings are shown in “Figure 32: PCS Settings for Receiver – Default Settings”. It
is observed in “Figure 32: PCS Settings for Receiver – Default Settings” that some entry fields
are disabled based on user-choices. For instance, the fields related to Elastic FIFO (EFIFO)
and Transition Density Checker (TDC) are not available for user-entry/user-choices since
EFIFO and TDC are disabled by default.
UG028, July 1, 2014
63
Page 64

Entry field
Purpose
Available Options
Choice made
Decoder to be used by
receive side
• Disabled
128/130b
If the user chooses to
to PMA.
True
False
Receive Bit Order
Reverse*3
True
False
Receive Polarity
Figure 32: PCS Settings for Receiver – Default Settings
RX PCS Settings
This page allows the user to configure the RX PCS settings. The entry fields and the available
options are listed in “Table 17: RX PCS Settings”. This table also presents the choices that are
made for the current design: simple_serdes_design.
Table 17: RX PCS Settings
64 UG028, July 1, 2014
Decoder*3
PBR Block*3
Receive Symbol Swap*3
Reverse*3
the design on the
Polarity Bit Reversal (PBR) Functions
use PBR. It should
match with the PBR
technique used on TXside. On TX-side, PBR0
is used on pre-encoded
data and PBR1 is used
on post-encoded data
Related to PBR block.
Related to PBR block.
Related to PBR block.
• 8b/10b
•
• PBR0
• PBR1
•
•
•
•
• True
• False
8B10B (8b/10b)
decoder
PBR0 (Default)
False
False
False
Page 65

Entry field
Purpose
Available Options
Choice made
Elastic FIFO
Whether clock
be used.
Whether 8B mode will
be used
• True
False
N/A since EFIFO is
disabled
Disabled
PCIe
Skip Word used for
EFIFO
Text field to select
user-defined value
N/A since EFIFO is
disabled
Whether Alternate
word will be used
• True
• False
N/A since EFIFO is
disabled
Text field to select
Enable ALT 1 is selected
Text field to select
user-defined value
N/A since EFIFO is
disabled
True
• False
N/A since EFIFO is
disabled
Text field to select
Enable ALT 0 is selected
Text field to select
user-defined value
N/A since EFIFO is
disabled
True
False
N/A since EFIFO is
disabled
Enable ALT 2 is selected
Enable Transition
False
Text field for user-
TDC is enabled)
x1
x16
*3
Use Elastic FIFO*3
8B Mode*3
SKIP Mode*3
SKIP Word 0*3
Eanble ALT 0*3
ALT SKIP Word 0*3
SKIP Word 1*3
Eanble ALT 1*3
ALT SKIP Word 1*3
SKIP Word 2*3
compensation block on
PCS (i.e., EFIFO) will
Skip mode used for
EFIFO
Alternate SKIP Word
used for EFIFO
Similar to the
parameters related to
*3
Skip Word 0.
• True
*2
• False
•
•
• 802.3ae (one word)
• 802.3 (two words)
•
user-defined value
(available only when
•
user-defined value
(available only when
False (Default)
N/A since EFIFO is
disabled
N/A since EFIFO is
disabled
N/A since EFIFO is
disabled
UG028, July 1, 2014
Eanble ALT 2*3
•
•
Text field to select
ALT SKIP Word 2*3
user-defined value
(available only when
N/A since EFIFO is
disabled
Transition Density Checker (TDC)
*1
False
N/A (TDC not
enabled)
Density Checker*3
Max Count*3
Whether TDC will be
used
The threshold value for
TDC
• True
•
defined value
(available only when
•
Max Count Scaling
*3
Factor
The maximum scaling
factor.
• x2
• x4
• x8
N/A (TDC not
enabled)
•
*3 Further description on these parameters can be found in Section”PCS Blocks in Receiver (RX)
Data Path”
65
Page 66

RX PCS Symbol Alignment
Entry field
Purpose
Available Options
Choice made
• Disabled
Bit Slip
Automatic Symbol
Alignment
Whether alignment
even symbols only.
Enable Double-Word
Alignment Mode
Whether double word
alignment will be used
True
False
Symbol alignment
word# 0 enabled
• True
False
“Figure 33: PCS Settings for Receiver – Symbol Alignment” presents the RX PCS Symbol
Alignment window with the choices pertaining to the current design: simple_serdes_design.
Figure 33: PCS Settings for Receiver – Symbol Alignment
The entry fields and the available options are listed in “Table 18: Symbol Alignment Settings
(PCS)”. This table also presents the choices that are made for the current design:
simple_serdes_design.
Table 18: Symbol Alignment Settings (PCS)
Symbol Alignment
*1
Mode
Mode used
• Automatic
• Manual
•
Automatic
Align on Even Symbol
operation will be on
• True
• False
•
•
False
False
66 UG028, July 1, 2014
Enable Word 0
•
True
Page 67

Entry field
Purpose
Available Options
Choice made
Word 0
Text field to enter user-
0 is enabled)
Text field to enter user-
0 is enabled)
Whether word 0 or the
used
Whether Seq0 will be
used.
• True
False
Text field to enter user-
is enabled)
Text field to enter user-
0 is enabled)
Whether Alternate of
Seq0 will be used
True
False
Text field to enter user-
Seq 0 is enabled)
• True
• False
Text field to enter user-
0 is enabled)
Text field to enter user-
Enable Word 1 or
Inverse of Word 1
• True
False
• True
False
Text field to enter user-
is enabled)
Text field to enter user-
0 is enabled)
True
• False
Value of Word# 0,
when enabled.
defined value
(available when Word
283* (Refer to)
Mask 0
Enable Word 0 or
Inverse of Word 0
Enable Seq 0
Seq 0 Value of Seq 0
Gap Count Gap Count for Seq0
Enable Alt Seq 0
Alt Seq 0
Enable Word 1
Value of mask for
word0
inverse of it will be
Value of Alternate of
Seq 0
defined value
(available when Word
• True
• False
•
defined value
(available when Seq 0
defined value
(available when Word
•
•
defined value
(available when Alt
000
False
False
N/A since Seq0 is not
enabled
N/A since Seq 0 is not
enabled
False
N/A since Alt Seq 0 is
not enabled
False
UG028, July 1, 2014
Word 1
Mask 1
Enable Seq 1
Seq 1
Gap Count
Enable Alt Seq 1
Similar to Word 0, Seq
0 etc.
defined value
(available when Word
defined value
(available when Word
0 is enabled)
•
•
defined value
(available when Seq 0
defined value
(available when Word
•
N/A since Word 1
000
False
False
N/A since Seq0 is not
enabled
N/A since Seq 0 is not
enabled
False
67
Page 68

Entry field
Purpose
Available Options
Choice made
Alt Seq 1
Text field to enter user-
Seq 0 is enabled)
• Misaligned
Disparity
The number of unlocks
reported
The number of locks
reported
Unlock Decrement
Count
Decrement count for
unlock
Text field to enter user-
defined value
defined value
(available when Alt
N/A since Alt Seq 0 is
not enabled
Unlock Mode
Unlock Count
Lock Count
When the unlock will
be reported
before misalignment
before alignment is
• Decode Error
• Decode or
Text field to enter user-
defined value
Text field to enter user-
defined value
Misaligned
3
3
1
*1 Based on user-selection, relevant ports are added to the GUI wrapper, which is reflected on the IP
Diagram sub-window.
The other available symbol alignment options are Manual and Bit Slip, as detailed in Section
– “Symbol Alignment”.
TX PCS Settings
“Figure 34: PCS Settings for Receiver – TX PCS Settings” presents the RX PCS Symbol
Alignment window with the choices pertaining to the current design: simple_serdes_design.
68 UG028, July 1, 2014
Figure 34: PCS Settings for Receiver – TX PCS Settings
The entry fields and the available options are listed in “Table 19: TX PCS Settings”. This table
also presents the choices that are made for the current design: simple_serdes_design.
Page 69

Table 19: TX PCS Settings
Entry field
Purpose
Available Options
Choice made
Disabled
128/130b
Whether PBR block is
PMA.
Setting for PBR block
on TX path.
• True
False
Transmit Bit Order
Reverse
Setting for PBR block
on TX path.
• True
• False
User-Controlled
Forcing
Option to force
forcing (from fabric?)
•
Encoder
• 8b/ 10b
•
8B10B
PBR Functions
PBR Block
Transmit Symbol Swap
Disparity and Error
used. PBR0 is used on
data before encoder (or
when encoder is
disabled). PBR1 is used
on encoded data to
disparity and error
• PBR0
• PBR1
•
• True
• False
PBR0
False
False
False
Clicking Next on the window titled “TX PCS Settings” will bring the windows for BIST test
settings. We will ignore those windows for this design.
Section on Manually Overriding PMA/PCS Register Values:
Based on the user choices made in the earlier sections, ACE has assigned the values for PMA
and PCS registers at this point. The advanced user however may want to change the predefined value for one or more registers. This section of ACE GUI provides this option for
advanced users.
UG028, July 1, 2014
Please refer to the Section - Bypassing PCS by Manually Overriding Corresponding Register
for further details on this.
69
Page 70

Generation of Wrapper Files:
The user can now generate wrapper files (src/ace folder) by clicking the Generate button.
Note: The user can generate the wrapper files without going through all the pages. In other
words, the user can use Generate button from any page to generate the wrapper files. If the
user does not set values for one or more multiple pages, ACE will use the default values for
the corresponding configurations.
When the user clicks the Generate button, a pop-up window, as shown in “Figure 35:
Generating the Wrapper Files” will be displayed.
Figure 35: Generating the Wrapper Files
The wrapper file locations and the names are based on the directory structure that have been
used to create this design.
The option Register Dump File is disabled here. If the option is chosen with the file name, the
corresponding file will provide the values of the PMA/PCS registers, based on the choices
made by the user while generating the wrapper.
The option VHDL Model can be used to generate a wrapper in VHDL. The resulting VHDL
file is essentially a wrapper that instantiates the Verilog model for the SerDes wrapper.
70 UG028, July 1, 2014
Page 71

If the files are successfully generated, the user will find the corresponding message on the
TCL sub-window, as shown in “ Figure 36: TCL console message upon successful generation
of wrapper files”.
Figure 36: TCL console message upon successful generation of wrapper files
Files Generated by ACE-GUI
Based on the directory structure and the file names that have been chosen (“Figure 35:
Generating the Wrapper Files”), there will be up to five files in simple_serdes_design/src/ace
folder:
• simple_serdes_design_wrapper.v: This file contains the RTL generated by ACE GUI. The
top level module for this wrapper is simple_serdes_design_wrapper. This module will be
instantiated in top level design module: simple_serdes_design.v file.
• simple_serdes_design_wrapper.vhd: If the VHDL file generation has been chosen.
• simple_serdes_design_wrapper.sdc: This file will provide the timing constraints for the
SerDes PLL clocks. This file further identifies the related and unrelated clocks.
• simple_serdes_design_wrapper.pdc: This file will provide the placement of the SerDes
lanes, based on the lane-positioning chosen in the Overview page (“Figure 26: New IP
Configuration Window – Populating Overview Page”).
• simple_serdes_design_registers.txt: This file will provide the values for all PCS and PMA
registers, based on the choices made in ACE GUI.
UG028, July 1, 2014
71
Page 72

Integration of SerDes Wrapper in a Design
This section details how to use the files generated by ACE GUI into a user-design. For readyreference, the design properties from “Design Flow: Creating a SerDes Design” are presented
again:
Design name : simple_serdes_design
Objective : Send data from fabric to SerDes and read-back data using internal loopback.
Data rate : 10.3125 Gbps
Standard : Generic
Number of lanes : 1
Placement : South lane# 8
Ref. clock : 156.25 Mhz
Data width : 40
PCS blocks used :
8b/10b encoder
8b/10b decoder
Symbol alignment: Automatic mode
Note: clock compensation (EFIFO) not used.
The simple_serdes_design will contain the following files:
• simple_serdes_design_top.v: Top-level RTL that will instantiate the SerDes wrapper
generated by ACE. As per the directory structure as shown above, this file will be
under src/rtl sub-directory.
• simple_user_design_wrapper.v: The SerDes wrapper RTL that has been generated by
ACE. (Under src/ace directory.)
• data_generation.v: This will include the code used to generate data for transmission,
including comma characters. (Under src/rtl sub-directory.)
• simple_user_design.pdc: ACE Placement file. (Under src/constraints sub-directory.)
• simple_user_design.sdc: ACE constraint file for timing. This will contain the timing
constraints from the ACE-generated simple_serdes_design_wrapper.sdc file as well
as constraints related to the additional clocks used in simple_user_design_top.v.
(Under src/constraints sub-directory.)
• tb_user_guide.v: This is the testbench used for design; we will use this for simulation
purposes. (Under src/tb sub-directory.)
The Achronix SerDes reference design Speedster22i_SerDes_1lane_10gbps_PCS_bypass_
RD002 can be referred for further understanding on how the ACE GUI generated files can be
used in a design.
Design and Wrapper Files
simple_serdes_design_top.v: This is the top-level module for the current design. This module
will instantiate the SerDes wrapper (from simple_design_wrapper.v file) and will use the
SerDes ports to: (a) send data to SerDes and (b) read-back data from SerDes. Some SerDes
ports are also brought to the FPGA I/O pads as reset and debug signals.
The ports that are available from the SerDes wrapper are displayed in “Figure 25: IP Diagran
Window”. To instantiate the wrapper module simple_serdes_design_wrapper, the following
construct is used:
simple_serdes_design_wrapper iSerDes
where, iSerDes is the name of the instance. The instance name iSerDes is used in other files as
well, such as the ace_placement.pdc and the ace_constraint.sdc files. If the instance name
72 UG028, July 1, 2014
Page 73

iSerDes is chosen as the Hierarchical Instance Path, the generated .sdc and .pdc files need not
SerDes Port Name
Top-level Signal-name
Comments
These input signals to SerDes
insert any I/O pads.
ch0_i_ba_RX_p
ln0_RX_p
ch0_i_bck_ref_m
ln0_refclk_m
ch0_i_bck_ref_p
ln0_refclk_p
Reset inputs to the SerDes from
to the PCS.
ch0_i_TX_rst_n1
ln0_rst_n_TX
ch0_i_rst_hard_n1
ln0_rst_hard
Transmit data input to SerDes
later.)
_data_clk
Output from SerDes to user
for the received data.
_data_clk
Output from SerDes to user
the transmitted data.
Receive side RX data output
from SerDes to the user logic.
Outputs from SerDes.
SerDes. These signals indicate
be modified.
“Table 20: Signals passed between the SerDes Instance and the Top-Level module” gives a
list of the ports in the SerDes wrapper that are accessed from the top-level module of the
current design. The corresponding signal names used in the top-level module are also listed
in this Table.
Table 20: Signals passed between the SerDes Instance and the Top-Level module
are also inputs to the top-level
RTL. Note: These signals are
ch0_i_ba_RX_m
ln0_RX_m
connected directly from SerDes
to the package balls without
any logic in between. In other
words, the users don’t need to
ch0_i_RX_rst_n1
ch0_i_TX_datain
ch0_o_RX
ch0_o_TX
ln0_rst_n_RX
ln0_TX_data
ln0_RX_clk
ln0_TX_clk
user logic.
Note: Same input can be used
for RX and TX reset signals.
These signals should preferably
be delayed from the hard-reset
signal. Hard reset goes to the
PMA and RX and TX resets go
from user logic. (Refer to
data_generation.v presented
logic. RX-clock generated from
SerDes and used for RX-path in
top-level, such as the checker
logic. TX-clock generated from
SerDes and used for TX-path in
top-level, such as generator for
UG028, July 1, 2014
ch0_o_RX_dataoutA
ch0_o_pma_RX_cdr_lck2dat
ln0_RX_data
ln0_pma_RX_cdr_lck2dat
These are status signals from
73
Page 74

SerDes Port Name
Top-level Signal-name
Comments
whether the SerDes is ready.
For instance, ln0_TX_ready
ch0_o_pma_TXready
ln0_pma_TXready
ch0_o_pma_synthready
ln0_pma_synthready
ch0_o_pma_RXready
ln0_pma_RXready
ch0_o_pma_RXstat
ln0_pma_RXstat
ch0_o_pma_sig_detect
ln0_pma_sig_detect
ch0_o_pma_synthstat
ln0_pma_synthstat
ch0_o_pma_TXstat
ln0_pma_TXstat
ch0_i_pipe_pd
2’b0
Power on reset signals for PMA.
the SerDes is powered up.
ch0_i_synth_iddq_n1
Ln0_i_synth_iddq_n
ch0_i_TX_iddq_n
Ln0_i_TX_iddq_n
Output from SerDes to user
used.
Input clock-signal to the SerDes
to enable loopback.
ch0_i_sbus_data[1:0]
ln0_sbus_wrdata
sbus-related signals.
ch0_i_sbus_req
ln0_sbus_req
ch0_i_sbus_sw_rst
ln0_sbus_sw_rst
ch0_o_sbus_ack
ln0_sbus_ack
ch0_o_sbus_data[1:0]
ln0_sbus_rddata
indicates that the SerDes is
ready for data receipt.
These signals can be used for
debugging and other purposes.
For instance, ln0_TX_ready can
be used to start data
transmission.
ch0_i_RX_iddq_n1
ch0_o_RX_syma_locked
ln0_i_RX_iddq_n
ln0_RX_syma_locked
Signals can be sent to assert
these inputs certain time after
logic. Indicates symbol
alignment, when the module is
for use with the Serial Bus
(SBUS). In this design, it is
coming from a top-level IO
ch0_i_sbus_clk
i_sclk
clock pad. The external SBUS
clock must be running when
you program this design into
the device since the SBUS is
access in the startup sequence
1
These signals are part of the reset sequence and are further detailed in the section: Reset
Sequence.
74 UG028, July 1, 2014
Based on the table above, the user can now instantiate the SerDes module into top-level RTL.
Page 75

Dynamically Changing the SerDes Register Values
Typically the PMA/PCS registers need not be changed during runtime. However,
simple_serdes_design uses internal SerDes loopback. Internal loopback may be the starting
point for the users to verify the functionality of any user-design. To enable the internal
loopback, the user needs to dynamically ( at run-time) set a PCS register via the SBUS
interface. This is done using the ACX_SERDES_LOOPBACK_CTRL module explained in
Chapter – “Dynamic Read/Write of SerDes Registers (Through SBUS)”. Internal loopback
cannot be programmed statically (in the ACE-generated bitstream). Section Loopback
Modes presents the loopback modes available with Achronix SerDes. The code below shows
an example of using ACX_SERDES_LOOPBACK_CTRL (reproduced from Chapter –
“Dynamic Read/Write of SerDes Registers (Through SBUS)” for ready reference).
Using sBus module to enable internal loopback
The code below shows how to enable internal loopback using the sBus
wire sbus_ln0_done;
wire inv_sbus_disable_loopback_ln0;
assign inv_sbus_disable_loopback_ln0 = ~i_sbus_disable_loopback;
wire unused_ln0_i_reg_write;
wire unused_ln0_i_reg_rw_req;
wire unused_ln0_i_reg_pma;
wire unused_ln0_i_reg_address;
wire unused_ln0_i_reg_wr_data;
wire unused_ln0_o_reg_rd_data;
wire unused_ln0_o_reg_rdwr_valid;
ACX_SERDES_LOOPBACK_CTRL #(
.LOOPBACK_MODE (`LPBK_TX_RX_PMA_INTERNAL),
.ENABLE_PASS_THROUGH(0)
)
i_loopback_ctl_ln0
(
.sbus_clk (i_sclk),
.rstn (1'b1), // ok to tie high
.disable_loopback (inv_sbus_disable_loopback_ln6), // rising edge disables loopback
.done (sbus_ln0_done), // program is finished
// serdes connections
.from_sbus_data (ln0_sbus_rddata[1:0]),
.from_sbus_ack (ln0_sbus_ack),
.to_sbus_data (ln0_sbus_wrdata[1:0]),
.to_sbus_req (ln0_sbus_req),
.i_pma_synthready (ln0_synthready),
.i_pma_TXready (ln0_TX_ready),
.i_pma_RXready (ln0_RX_ready),
.to_sbus_sw_rst (ln0_sbus_sw_rst),
// pass-through connections, can be used when 'done' is high
// (ignored if ENABLE_PASS_THROUGH = 0)
.i_reg_write (unused_ln0_i_reg_write), // request is ‘write'
.i_reg_rw_req (unused_ln0_i_reg_rw_req), // rising edge starts action
.i_reg_pma (unused_ln0_i_reg_pma), // address is pma address
.i_reg_address (unused_ln0_i_reg_address), // 16-bit pcs or pma address
UG028, July 1, 2014
75
Page 76

.i_reg_wr_data (unused_ln0_i_reg_wr_data), // data for write
.o_reg_rd_data (unused_ln0_o_reg_rd_data), // data from read (latch when
o_reg_rdwr_valid)
.o_reg_rdwr_valid (unused_ln0_o_reg_rdwr_valid) // action finished (high for one cycle)
);
Note: Not all registers can be modified dynamically. For a list of the dynamic registers, please
contact Achronix Customer Support.
Note: To use external loopback (cables), the ACX_SERDES_LOOPBACK_CTRL instance
needs to be removed from the design logic, or simply change the LOOPBACK_MODE
parameter to disable internal loopback.
simple_serdes_design_wrapper.v: This is the wrapper file generated by ACE GUI. No change
is required in this file for the current design.
data_generation.v: This file generates TX data for SerDes. The data generated are 40-bits.
Comma characters are also generated in this file. The port-definitions for the module
data_generation is shown below.
module data_generation (
input clk,
input rst_n,
input data_gen_en,
output [39:0] data_out
);
This module requires clock signal, reset signal and enable signal as inputs. For TX data, the
transmit-side clock-signal and the transmit-side reset-signal are used as inputs. In the current
design, the data generation is enabled only when PMA is ready for it’s operation. User may
use any one or more of the following signals to enable the data-generation. However, we
prefer using TXready or synthready as enable signal to decouple the TX path from the RX
path:
• ln0_pma_RXready,
• ln0_pma_TXready,
• ln0_pma_synthready and
• In0_pma_RX_cdr_lck2dat
The instantiation of data_generation in the top-level module is shown in the code below.
data_generation idata_generation (
.clk (ln0_TXclk), // TX-clock from SerDes
.rst_n (ln0_rst_n_TX), // TX-reset used for SerDes
.data_gen_en (ln0_pma_TXready), // TX-ready signal from SerDes
.data_out (ln0_TX_data) // TX-data to SerDes
);
Data generated by the data_generation module needs to include comma characters. For
simple_serdes_design, 10’h1BC is used as comma character. This complies with the values
10’h283 and 10’h17C that has been set as symbol alignment characters earlier in the ACE
GUI. The user may refer to section “Symbols and Comma Character” for details on these
characters.
76 UG028, July 1, 2014
Page 77

Note: When 10’h1BC is transmitted from the fabric, the output of the 8b/10b decoder on the
PCS receiver path will be 10’h283 (alternate: 10’h17C).
The code for data_generation module that includes comma-characters is shown below
module data_generation (
input clk,
input rst_n,
input data_gen_en,
output [39:0] data_out
);
always @ (posedge clk)
begin
if (rst_n == 1'b0)
// comma-characters when SerDes in reset-state (active-low reset)
data_out <= {10'h000,10'h1BC,10'h000,10'h1BC};
else if (data_gen_en == 1’b1)
// when data-generation enabled, i.e. TX_ready from SerDes is up
// *** Logic for data-generation goes here, such as PRBS-7 ***
// *** Should also contain comma characters ***
else
// comma-characters when data generation is ‘not’ enabled
ln0_TXdata <= {10'h000,10'h1BC,10'h000,10'h1BC};
end
endmodule
Using the clocks from SerDes: This sample design has the EFIFO disabled. Hence, two clocks
are provided by the SerDes for the fabric: TX-clock and RX-clock. These two clocks may not
be aligned with each other. To avoid the false paths, the user needs to use the TX-clk on the
transmitter datapath (such as data generation for SerDes) and the RX-clk on the receive data
path (such as checking the received data from SerDes for correctness).
Placement of SerD es
The placement file used for the simple_serdes_design is: src/constraints/ace_placement.pdc.
This file contains the placement information for the followings:
• Placement information for the SerDes instance
• Clock/reset inputs to the SerDes
• Debug signals that the user may want to bring outside the FPGA.
The placement of SerDes depends on the lane that the user wants to use. While generating
the wrapper from ACE GUI, lane# 8 has been chosen for placement (“Figure 23: New IP
Configuration Window- Overview Page”). The consequent placement in
simple_serdes_design_wrapper.pdc file will be:s
set_placement -batch -fixed { i:x_ch0.u_serdes_wrap.u_serdes } {
s:te_serdes_12lane_top_i1.u_serdes_lane_top_wrap_i0.u_serdes_lane_top }
Since, the SerDes instance as iSerDes in the top-level module, the placement needs to be
modified as:
set_placement -batch -fixed { i:iSerDes.x_ch0.u_serdes_wrap.u_serdes } {
s:te_serdes_12lane_top_i1.u_serdes_lane_top_wrap_i0.u_serdes_lane_top }
UG028, July 1, 2014
For information about how to place the clock signals, reset signals (such as rst_hard in the
listing above) and other debug signals (such as ln0_synthready), please refer to the UG001 –
ACE Users Guide. For the Speedster22i HD1000 Development Kit, the following three show
77
Page 78

the placement of SerDes-Reset signal (ln0_rst_hard); TX-ready status signal (ln0_TX_ready)
and the placement of the sbus-clock that is required to set internal-loopback through sbus
interface
# Manually entered Design-specific: For providing sbus-clock for sbus-interface
# The pin (pad0_clk_bank_se) refers to the clock-supply used in Achronix Validation Board.
set_placement -fixed -batch {p:i_sclk} {d:pad0_clk_bank_se}
#SerDes reset
set_placement -batch -fixed {p:ln0_rst_hard} { d:pad0_clk_bank_nw }
# TX_ready signal is brought to a LED (active-low)
set_placement -batch -fixed {p:ln0_pma_TXready} { d:pad_ws_byteio9_dq3 }
Timing Constraints
Using the directory structure defined earlier, the timing constraints will be in the file
src/constraints/ace_constraint.sdc. The ACE GUI generates template for timing constraints
used for the respective SerDes design. For instance, for simple_serdes_design, timing
constraint has been generated as src/ace/simple_serdes_design_wrapper.sdc file (“Figure 35:
Generating the Wrapper Filess”). This ACE-generated file can be used as a template for
defining the timing constraints of a SerDes design. However, the user must manually enter
the design related constraints, which are not generated by ACE for obvious reasons.
The simple_serdes_design that is being described here requires such clocks that the user
needs to provide. In the following code-snippet, the SerDes reference clocks from “Table 20:
Signals passed between the SerDes Instance and the Top-Level module” as well as snapshot
clocks have been added to the ACE-generated constraints. (Please refer to the ACE User
Document for further details on using snapshot debugging tool into a design.)
#Reference clocks
# Manually entered Design-specific: For providing 156.25 reference clocks to SerDes
create_clock -period 6.4 refclkp
create_clock -period 6.4 refclkn
# Manually entered Design-specific: For providing 50MHz clock to sbus-clock.
create_clock -period 20 i_sclk
# Manually entered Design – specific: SNAPSHOT clocks
# Clock for snapshot and for jtap
create_clock -period 100 tck
# Uset-entered
set_clock_groups –asynchronous –group {tck }
# From ACE – generated constraint file:
# Lane RX Clocks
# Period (ns) = 1/(RX data rate / RX 8b10b-encoded data width)
# 1.9393939393939394 = 1/(10.3125 / 20.0)
# Unrelated Clock Mode: All lane-to-lane clocks are unrelated EXCEPT between the TX clocks Elastic buffer is disabled
create_clock -period 1.93939393939394 iSERDES.x_ch0.u_serdes_wrap.u_serdes/o_RX_data_clk
create_clock -period 1.93939393939394 iSERDES.x_ch0.u_serdes_wrap.u_serdes/o_TX_data_clk
# Lane Clock Divider Generated Clocks
# Unrelated Clock Mode: All lane-to-lane clocks are unrelated - Elastic buffer is disabled
78 UG028, July 1, 2014
Page 79

create_generated_clock iSERDES.x_ch0.iffdmux.GEN_CLKDIV.TX.iTXclkdiv/clk_out –source
iSERDES.x_ch0.u_serdes_wrap.u_serdes/o_TX_data_clk -divide_by 2
create_generated_clock iSERDES.x_ch0.iffdmux.GEN_CLKDIV.RX.RX.iRXclkdiv/clk_out source iSERDES.x_ch0.u_serdes_wrap.u_serdes/o_RX_data_clk -divide_by 2
# Complete: ACE - generated constraints
# Clock-grouping : For Both ACE-generated and design-specific clocks
# The user may refer to the ACE documentation for further details on clock-grouping (???)
# Grouping all clocks: helps decision making during the place-and-route
set_clock_groups -asynchronous -group
{iSERDES.x_ch0.u_serdes_wrap.u_serdes/o_RX_data_clk}\
-group {iSERDES.x_ch0.u_serdes_wrap.u_serdes/o_TX_data_clk} \
-group {iSERDES.x_ch0.iffdmux.GEN_CLKDIV.TX.iTXclkdiv/clk_out} \
-group {iSERDES.x_ch0.iffdmux.GEN_CLKDIV.TX.iRXclkdiv/clk_out} \
-group {tck core_tck}
-group {i_sclk}
Test bench Setup for Simulation
Based on the primary inputs and primary outputs listed in “Table 20: Signals passed between
the SerDes Instance and the Top-Level module”, testbench may now be created as shown
below:
module tb_fab_pcs_pma_no_ebuf_1ln_10p3125gbps_156p25mhz();
reg ch0_ref_clk_p;
reg ch0_reset_signal;
reg ch0_RX_output;
initial
begin
ch0_ref_clk_p = 1'b0 ;
ch0_reset_signal = 1'b0 ;
#4000;
ch0_reset_signal = 1'b1 ;
end
// Generating 156.25 MHz reference clock
always #3200 ch0_ref_clk_p = ~ch0_ref_clk_p;
fab_pcs_pma_no_ebuf_1ln_10p3125gbps_156p25mhz DUT(
// Okay to tied to 1'b1
.ln0_RX_m (1'b1),
.ln0_RX_p (1'b1),
// 156.25 MHz differential reference clocks
.ln0_refclk_m (~ch0_ref_clk_p),
.ln0_refclk_p (ch0_ref_clk_p),
// Same reset input for hard-reset, RX-reset & TX-reset
.ln0_rst_n_RX (ch0_rst_hard_n),
.ln0_rst_n_TX (ch0_rst_hard_n),
.ln0_rst_hard (ch0_rst_hard_n),
.ln0_RX_data (ch0_RX_output)
);
Endmodule
UG028, July 1, 2014
79
Page 80

Design Guidelines
This section will first present the coding practice that the user is recommended to use.
Reset Sequence
The following sequence is presented as a guidance to define the reset sequence to be used
with a typical SerDes application.
1. Deassert hard-reset (ch0_i_rst_hard_n in “Table 20: Signals passed between the SerDes
Instance and the Top-Level module”)
2. Wait for 1200us; registers within SerDes can be programmed during this time. Deassert
the ch0_i_iddq_n resets in “Table 20: Signals passed between the SerDes Instance and the
Top-Level module”.
3. Deassert the reset ch0_i_TX_rst_n on PCS-TX data-path
4. Wait for 850us.
5. Deassert the reset ch0_i_RX_rst_n on PCS-RX data-path
Notes:
1. The reference clocks on all instantiated serdes lanes MUST be running during
programming the bitstream on the HD1000 device to properly configure the SerDes.
2. Dynamic functions like Loopback mode, BIST and SSC generation must be disabled
when programming the bitstream. These functions have to be enabled through SBUS after
bitstream programming.
SerDes Placement and Clocking Limitations
Although there are 64 independent raw SerDes lanes available on the device, there are
restrictions on how many lanes can effectively be used in a given design, depending on
placement and configuration of SerDes clocks entering the Core. All 64 SerDes lanes may be
used in a design, as long as the clock and placement criteria are met. Below is a list of rules
you can use to determine if your design’s SerDes configuration will be supported on the
device.
Note: There are workarounds for some corner cases that violate the SerDes placement and
clocking limitations. Please contact support to discuss if your corner case design has a
workaround or not
Clock resource limitations in the Core:
• The Core is divided into clock regions as seen in the figure below. The clock regions
are split by the clock trunk (vertically) and the clock branches (horizontally), forming
a set of clock regions on the West and another set on the East.
• Each clock region is capable of handling 16 clock resources
• All clocks from SerDes lanes 0 to 14 on the North Side of the Chip enter the far
NorthWest clock region.
• All clocks from SerDes lanes 20 to 31 on the North Side of the Chip enter the far
NorthEast clock region.
• All clocks from SerDes lanes 15 to 19 on the North Side of the Chip enter BOTH the
far NorthWest and far NorthEast clock regions. Avoid using these lanes if possible.
80 UG028, July 1, 2014
Page 81

• All clocks from SerDes lanes 0 to 14 on the South Side of the Chip enter the far
SouthWest clock region.
• All clocks from SerDes lanes 20 to 31 on the South Side of the Chip enter the far
SouthEast clock region.
• All clocks from SerDes lanes 15 to 19 on the South Side of the Chip enter BOTH the
far SouthWest and far SouthEast clock regions. Avoid using these lanes if possible.
• As a rule of thumb, you will always need at least 1 system clock and 1 SBUS clock in
each clock region. So the total number of SerDes clocks is effectively limited to 14
clocks.
UG028, July 1, 2014
81
Page 82

Figure 37: Clock Region View
82 UG028, July 1, 2014
Page 83

The following factors determine how many clocks enter the Core for each SerDes lane or
bonded group of lanes:
• Use of Hard IP Controllers: If you are using a hard IP controller, such as Interlaken,
Ethernet, or PCIe, then the number of clock resources entering the Core is
determined by the number of clocks on the hard IP controller. All raw SerDes clocks
connect to the hard IP controllers and do not enter the Core. Using the hard IP
controllers significantly reduces the number clock resources needed in the Core,
compared to using raw SerDes.
• By default, each raw SerDes lane consumes 2 clock resources in the Core: 1 Tx Data
Clock and 1 Rx Data Clock
• If you are using a data rate greater than or equal to 6 Gbps, then the Wide Bus
interface must be used. Using Wide Bus causes the number of clocks per raw SerDes
lane to double. Each SerDes clock entering the Core is divided by 2, resulting in a
second clock resource for each original clock.
• If you enable the EFIFO Elastic Buffer in the PCS, each pair of Rx and Tx clocks
become combined into 1 clock, resulting in ½ the clock resources entering the Core.
• If you enable channel bonding in the PCS, you can bond a group of SerDes lanes
together, resulting in 1 set of master SerDes clocks per the entire bonded group of
SerDes lanes (as opposed to 1 set of clocks per lane). Channel bonding is limited to a
maximum of 12 lanes per bonded group. This can dramatically reduce the number
of clocks entering the Core. For example, if you have 12 non-bonded raw 10 Gbps
SerDes lanes placed on the North side of the chip on lanes 0-11, it will result in 48
clocks coming into the Core (2 per lane x 2 for Wide Bus). That is too many clocks.
Now, if you bond the 12 raw serdes lanes together with channel bonding, you will
th
only need 4 clocks (for the master lane) entering the Core, resulting in 1/12
the
clock resources being consumed. This now easily fits within the 16 clock limit per
Core clock region.
Tips to reduce clock resources:
• Use hard IP controllers
• Use channel bonding
• Use the EFIFO in the PCS
• Use a data rate of less than 6 Gbps (to eliminate Wide Bus)
The following placement limitations determine where you can place a group of bonded or
non-bonded SerDes lanes:
• A single raw SerDes lane may be placed on any SerDes site in the device
UG028, July 1, 2014
83
Page 84

• SerDes lanes on the chip are divided into physical groups of 8 lanes (0-7), 12 lanes (8-
19) and 12 lanes (20-31) on the North and South sides of the chip, as seen in Figure 38
– Physical assignment of SerDes Lanes below.
Figure 38: Physical assignment of SerDes Lanes
• Channel bonding of multiple lanes is limited to fit within the boundaries of each
group. For example, a bonded group of 10 SerDes lanes cannot be placed on lanes 09, since that overlaps the boundary of the physical group of lanes 0-7.
• On both the North and South sides of the chip, there are additional restrictions on
lanes 20-31 if you instantiate multiple non-bonded serdes lanes. You cannot place
the non-bonded SerDes lanes adjacent to each other. Due to clock muxing
limitations, you must place each non-bonded lane on every other (even numbered)
lane. Figure 39 – SerDes Placement Guidelines below shows available lanes in white,
and illegal/unavailable lanes in gray for a multi-lane non-bonded interface. Note that
if you use channel bonding, you may place your multi-lane bonded interface on any
of the lanes 20-31.
84 UG028, July 1, 2014
Page 85

Figure 39: SerDes Placement Guidelines
• Avoid lanes 15-19 (on North and South) when not using channel bonding, since these
lanes consume clock resources in both East and West clock regions. This is not a
hard rule, but is something to be aware of when calculating clock resources.
Example of managing clock resources:
Let’s say we want to use all 32 SerDes lanes on the North side of the chip. We will not be
using the hard IP controllers. We need to have 8 independent non-bonded raw SerDes lanes
running at 5 Gbps, and the other 24 lanes can optionally use channel bonding and run at 10
Gbps.
To start with, remember that there are 16 clock resources available in the NorthWest clock
region and another 16 clock resources available in the NorthEast clock region.
If we simply instantiate 8 raw SerDes at 5 Gbps, we will get 16 clock resources entering the
Core: 1 Rx Data Clock and 1 Tx Data Clock for each lane. We can reduce this to 8 clocks by
enabling the PCS EFIFO Elastic Buffer to combine Tx and Rx clocks.
Next, if we were to instantiate the 24 10 Gbps lanes independently, we would get a total of 96
clocks entering the Core: (1 Rx Data Clock and 1 Tx Data Clock for each lane) x 2 for Wide
Bus. This is far too many clocks. We can reduce this with channel bonding. Since channel
bonding is limited to a maximum of 12 lanes per group, let’s create 2 bonded groups of 12
UG028, July 1, 2014
85
Page 86

lanes. Now we have a total of 4 clocks per bonded group of 12 lanes, or 8 total clocks for the
24 10 Gbps lanes.
At this point, we have a total of 16 clock resources needed for the SerDes (8 for the 5 Gbps
lanes and 8 for the 10 Gbps lanes). Now we need to place the SerDes lanes.
Since the chip allows bonded groups of lanes to be placed on lanes 0-7, 8-19, and 20-31, we
can easily see that our groups of 12 bonded lanes will not fit on lanes 0-7. We must place our
2 groups of 12 bonded lanes on lanes 8-19 and 20-31. This leaves lanes 0-7 open to place the 8
independent 5 Gbps lanes on.
Now let’s see where we stand with the clock resources. The 8 independent 5 Gbps lanes
(using EFIFO) placed on lanes 0-7 bring 8 clocks into the NorthWest clock region. The
bonded group of 12 10 Gbps lanes placed on lanes 8-19 bring an additional 4 clocks into the
NorthWest region. Let’s say the master clock lane is assigned to lane 15 on the chip. Since
lanes 15-19 distribute clocks to both East and West, that would mean we now also have 4
clocks entering the NorthEst region. The bonded group of 12 10 Gbps lanes placed on lanes
20-31 bring an additional 4 clocks into the NorthEast region.
So, for all 32 lanes, we have a total of 12 SerDes clocks in the NorthWest region and 8 SerDes
clocks in the NorthEast region. This leaves 4 clock resources available in the NorthWest
region and 8 clock resources available in the NorthEast region (for system clocks, SBUS clock,
etc).
Now, if we wanted to add more SerDes lanes on the South side of the chip, we would go
through the same type of exercise. Note that using the SerDes lanes on the North side of the
chip does not consume clock resources on the South clock regions (which are available to the
South SerDes lanes).
Wide Bus
At the interface between the SerDes and the FPGA fabric, incoming RX data is parallelized
onto a user-selected width bus before being provided to the FPGA fabric. Similarly, parallel
data of a user-selected width from the FPGA fabric is serialized in the SerDes before being
transmitted on outgoing TX lanes.
This interface allows for parallelization of 8, 10, 16 or 20, as defined by the user. For example,
a full duplex link operating at 2.5Gbps with a data width of 10, would require the FPGA
fabric to be operating at 2.5*1000/10 = 250MHz.
As you can imagine, even at the widest data width of 20, high link data rate operation would
result in FPGA fabric timing requirements that would be difficult to achieve.
To accommodate for this, and to ensure that timing can be closed for the FPGA fabric in a
reasonable manner, the “Generic” and “Lanelinx” Standards in the SerDes macro
automatically introduce a ‘Wide Bus’ interface. This interface is enabled for all data rates
beyond 6.25 Gbps and essentially doubles the parallel transmit/receive data bus (and
supporting buses) widths at the SerDes-FPGA fabric interface, whilst accommodating FPGA
fabric operation at half of the previously defined frequency. There is also some additional
latency introduced.
For example, a full duplex link operating at 8.0Gbps with a data width of 20, would require
the FPGA fabric to be operating at 8.0*1000/40 = 200MHz. The datain and datout buses would
both be of size 40.
“10G Ethernet”, “Interlaken” and “PCI-Express” also provide support for wide bus
interfaces. Please refer to the respective user guides on support details and other relevant
information.
86 UG028, July 1, 2014
Page 87

Design Tips
Timing report of a routed design: When a design passes through the place-and-route tool,
please make sure that there is no setup- and/or hold-time violation for the routed design.
Section-4 of the ACE User Document provides a detailed description of checking the timing
reports generated by ACE.
Bringing up debug/status signals from the top-level RTL: To facilitate debugging of a design,
we can bring up the SerDes status signals to on-board LED’s and/or SMA/SMP connectors.
“Table 20: Signals passed between the SerDes Instance and the Top-Level module” provides
a list of debugging signals that we use as primary outputs from the top-level RTL:
simple_serdes_design_top.v.
Note: These signals can be used for other purposes as well. For example, ln0_pma_TX_ready
signal can be used to enable the data-generation and transmission to SerDes.
Observing the clocks from SerDes: It is a good idea to observe the RX and TX clock signals
that are generated by SerDes. The user may not directly connect these signals (ln0_RX_clk
and ln0_TX_clk) to SMA connectors. An alternative way of observing these signals is to
generate a signal (in the fabric) based on these clocks and connect them to SMA connectors.
The following code snippet from simple_serdes_design_top.v shows two clock signals that
are generated in the fabric. The frequency of these generated signals are half of that for the
TX and the RX clock frequencies.
// ln0_TX_clk_div2 and ln0_RX_clk_div2 have been defined as primary outputs.
//
// Generation of divide-by-2 clock, based on TX-clk generated by SerDes
always @ (posedge ln0_TX_clk or negedge ln0_rst_n_TX)
begin
if (ln0_rst_n_TX == 1'b0)
ln0_TXclk_div2 <= 1'b0;
else
ln0_TXclk_div2 <= ~ln0_TXclk_div2;
end
// Generation of divide-by-2 clock, based on RX-clk generated by SerDes
always @ (posedge ln0_RXclk or negedge ln0_rst_n_RX)
begin
if (ln0_rst_n_RX == 1'b0)
ln0_RXclk_div2 <= 1'b0;
else
ln0_RXclk_div2 <= ~ln0_RXclk_div2;
end
UG028, July 1, 2014
For observation, we need to connect these signals to SMA connectors, which require the
addition of the following two lines in src/constraints/ace_placement.pdc file:
#div2 version of SerDes RX and TX clocks
set_placement -batch -fixed {p:ln0_TXclk_div2} {SMA Pin in Development Board}
set_placement -batch -fixed {p:ln0_RXclk_div2} {SMA Pin in Development Board}
The frequency of RX and TX clock does not depend on the reference clock that we are using,
which is 156.25 MHz in our sample design. Rather, the frequency of the clocks generated by
SerDes depends on the data-rate and data-width. This frequency is determined by ACE GUI
while generating the wrapper file.
87
Page 88

For our sample design, we have defined data-rate=10.3125gbps and data-width=20. For this
higher-rate, the wide-bus architecture will be used. In other words, 40-bits data will be
transmitted to and received from SerDes. The frequency for both TX and RX clock will then
be 257.81 MHz:
Equation 2
We should have clocks toggling at ~129 MHz for both ln0_TXclk_div2 and ln0_RXclk_div2.
1) It’s mandatory for all SerDes lanes instantiated in the design to have a reference clock
going to them. If two SerDes lanes are instantiated in a design, BOTH lanes will need a
reference clock even if only one of them is being used.
2) ALL reference clocks should be running on ALL the serdes lanes before programming
the bitstream (and they should be running after programming as well).
3) For certain modes (Deskew), all the reference clocks should be coming from the same
clock source.
=
__
_
10.3125
=
40
=
257.81
Variants of the Simple Design
In the earlier section, a sample design has been presented, the description of which is given in
the listing below. This section details the preparation of the designs that use different sets of
components from PCS block. This section will detail only the derivatives, as compared to the
steps followed in creating the simple design in the earlier section: simple_serdes_design.
Understanding the steps detailed in this section therefore requires the understanding of the
steps listed for creating simple_serdes_design.
Design using Clock Compensation (EFIFO):
In simple_serdes_design, we disable the PCS block that takes care of clock compensation:
EFIFO. The preparation of a design with clock compensation is presented here.
The design with clock compensation enabled is called simple_serdes_design_efifo. The
specifications for this design are listed below
Design name : simple_serdes_design_efifo
Objective : Send data from fabric to SerDes and read-back data using external loopback.
Data rate : 10.3125 Gbps
Standard : Generic
Number of lanes : 1
Placement : South lane# 8
Ref. clock : 156.25 Mhz
Data width : 40
PCS blocks used :
8b/10b encoder
8b/10b decoder
Symbol alignment: Automatic mode
Clock compensation (EFIFO) is enabled
88 UG028, July 1, 2014
Page 89

Entry field
Available Options
Choice made
Disabled
128/130b
Polarity Bit Reversal (PBR)
Functions
• PBR0
• PBR1
True
True
False
• True
False
False
• True
False
• Disabled
• PCIe
Text field to select user-defined
value
Overview of the modification: With respect to the steps followed in creating
simple_serdes_design, the following modifications are made in preparing
simple_serdes_design_efifo:
1. Changes in using ACE GUI during wrapper generation.
2. Changes in RTL code related to using clock signals generated by SerDes.
3. Changes in ace_placement.pdc and ace_constraint.sdc related to using clock signals from
SerDes.
These modifications are detailed below.
Modification – 1 (ACE GUI): In the design discussed above (simple_serdes_design), clock
compensation (EFIFO) was disabled. For the current derivative of the design
simple_serdes_design_efifo, EFIFO is enabled.
We will start by creating a new ACXIP file in the ACE GUI for the modified design,
simple_serdes_design_efifo. All fields in the GUI can be set to the same values as was done for
simple_serdes_design, wit hthe exception of the RX PCS Setings as shown below. The entry
fields and the available options are listed in “Table 21: Modifications for
simple_serdes_design_efifo (RX PCS Settings)” This table also presents the choices that are
made for the current design: simple_serdes_design_efifo.
Table 21: Modifications for simple_serdes_design_efifo (RX PCS Settings)
Decoder*3
PBR Block*3
Receive Symbol Swap*3
Receive Bit Order Reverse*3
Receive Polarity Reverse*3
Elastic FIFO*3
Use Elastic FIFO*3
8b Mode*3
SKIP Mode*3
•
• 8b/10v
•
•
• False
•
•
•
• True
•
•
• 802.3ae (one word)
• 802.3 (two words)
*2
8B10B (8b/10b) decoder
PBR0 (Default)
False
False
False
True
False
802.3ae (one word)
UG028, July 1, 2014
SKIP Word 0*3
10’h283
89
Page 90

Entry field
Available Options
Choice made
Eanble ALT 0*3
True
False
Text field to select user-defined
Enable ALT 1 is selected
Text field to select user-defined
value
N/A since 802.3ae is chosen as
SKIP Mode
True
• False
N/A since 802.3ae is chosen as
SKIP Mode
Text field to select user-defined
Enable ALT 0 is selected
Text field to select user-defined
value
N/A since 802.3ae is chosen as
SKIP Mode
True
• False
N/A since 802.3ae is chosen as
SKIP Mode
Text field to select user-defined
Enable ALT 2 is selected
Transition Density Checker
(TDC)
Enable Transition Density
False
Text field for user-defined value
enabled)
x1
x16
•
•
True
ALT SKIP Word 0*3
SKIP Word 1*3
Eanble ALT 1*3
ALT SKIP Word 1*3
SKIP Word 2*3
Eanble ALT 2*3
ALT SKIP Word 2*3
Checker*3
Max Count*3
value (available only when
•
value (available only when
•
value (available only when
• True
•
(available only when TDC is
*1
10’h17C
N/A since 802.3ae is chosen as
SKIP Mode
N/A since 802.3ae is chosen as
SKIP Mode
False
N/A (TDC not enabled)
•
• x2
Max Count Scaling Factor*3
• x4
• x8
•
N/A (TDC not enabled)
*1 If True is selected, the ACE GUI will add one input port (ch0_i_RX_tdc_clr) and one output port
(ch0_o_tdc_det) to the wrapper RTL. This change is reflected in IP Diagram sub-window.
*2 When EFIFO enabled, four additional EFIFO related ports are added to wrapper
(ch0_o_efifo_ovr_flw, ch0_o_efifo_skp_add, ch0_o_efifo_skp_del and ch0_o_efifo_und_run).
*3 Further descriptions on these functions are presented in Chapter-“PCS Blocks in Receiver (RX)
Data Path”
A snapshot of RX PCS Settings for the current derivative of the design is shown in “Figure 40
PCS Settings for Receiver – Configurations for Decoder and Elastic FIFO”.
90 UG028, July 1, 2014
Page 91

Figure 40: PCS Settings for Receiver – Configurations for Decoder and Elastic FIFO
Now, just as we did for the design without clock-compensation (simple_serdes_design), we
can generate the design files from the ACE GUI for our design with clock compensation
(simple_serdes_design_efifo).
Modification – 2 (RTL Code): The comma character that has previously been used for symbol
alignment is used as EFIFO SKIP word in this derivative of the design. Therefore, no change
is required for the data generation module (data_gen.v).
However, with clock compensation enabled, the aligned TX and RX clocks are available from
the SerDes instance, as a single clock. Top-level design needs to be modified to reflect this.
More specifically, in the baseline design simple_serdes_design, two clocks were generated by
SerDes: ln0_TX_clk and ln0_RX_clk. These two clocks had respectively been used on the
transmitter side (such as data generation) and on the receiver side (such as data check). In
contrast, for the current derivative of the baseline design (simple_serdes_design_efifo), one
clock .ch0_o_TX_data_clk is used as the clock from SerDes.
UG028, July 1, 2014
91
Page 92

Related modifications are listed below:
Simple_serdes_design_efifo_wrapper iSerDes
(
// =============================
// Lane 0
// **********************
// Inputs to SerDes
// **********************
.. .. ..
.. .. ..
// **********************
// Outputs from SerDes
// **********************
// Data received from SerDes
.. .. ..
.. .. ..
// Clocks from SerDes
.ch0_o_TX_data_clk (ln0_TX_clk),
.ch0_o_RX_data_clk (ln0_RX_clk_unused),
// okay to keep floating as well.
);
• Modification to the code related to the generation of divide_by_2 clock signals that are
used for debug purpose:
// ln0_TX_clk_div2 and ln0_RX_clk_div2 have been defined as primary outputs.
//
// Generation of divide-by-2 clock, based on TX-clk generated by SerDes
always @ (posedge ln0_TX_clk or negedge ln0_rst_n_TX)
begin
if (ln0_rst_n_TX == 1'b0)
ln0_TXclk_div2 <= 1'b0;
else
ln0_TXclk_div2 <= ~ln0_TXclk_div2;
end
// ************************************************************************
// ******* We comment out the divide_by_2 clock for ln0_RX_clk
// Generation of divide-by-2 clock, based on RX-clk generated by SerDes
// always @ (posedge ln0_RXclk or negedge ln0_rst_n_RX)
// begin
// if (ln0_rst_n_RX == 1'b0)
// ln0_RXclk_div2 <= 1'b0;
// else
// ln0_RXclk_div2 <= ~ln0_RXclk_div2;
// end
// **** Commented out
// ************************************************************************
92 UG028, July 1, 2014
Page 93

Modification – 3 (placement and timing constraints): Since there is only one divide-by-two
clock in this derivative of the design, we can remove the placement for ln0_RXclk_div2 from
ace_placement.pdc.
Contents of the ace_constraints.sdc file can be copied from the ACE generated .sdc file except
for the constraints related to the user-defined clocks (such as, reference clocks and snapshot
clocks).
Design Bypassing PCS:
There are two modes for bypassing a PCS:
1. PCS Enabled mode: In this mode, PCS is not disabled, but all of the PCS modules are
disabled. In other words, data (transmit and receive) will travel through the PCS components
while bypassing them, as shown in “Figure 6: PCS Transmitter Block Overview”.
2. PCS Bypassed mode: In this mode, the PCS block is bypassed on both transmit and
receive datapaths. This is shown in “Figure 6: - PCS Transmitter Block Overview”.
Note: While creating the baseline design (simple_serdes_design), the PCS has been kept
enabled while bypassing some PCS modules, such as EFIFO and deskew modules.
“Table 9: Latency across the PCS blocks” presents the latency that the data-path experiences
for each of the above two modes:
With respect to the simple baseline design (simple_serdes_design) where some of the PCS
modules are used, this derivative of the design will bypass PCS module individually (Mode1 above) or will completely bypass the PCS block (Mode-2 above). This derivative of the
baseline design is called simple_serdes_design_pcs_bypass. For this derivative, this section
presents the derivatives with respect to the design flow used for creating the baseline design.
Specifications for this derivative are shown below.
Design name : simple_serdes_design_pcs_bypass
Objective : Send data to SerDes and read-back using loopback.
Data rate : 10.3125 Gbps
Standard : Generic
Number of lane : 1
Placement (lane to be used): Bottom-lane# 8
Ref. clock : 161.138125 Mhz
Data width : 20 (Wrapper will use wide-bus to make data 40-bit wide)
PCS blocks used : None
Mode – a: PCS modules are disabled
Mode – b: PCS is disabled as a block.
No comma character required for transmit data since we are not using symbol alignment or
deskew blocks.
Overview of the changes: Compared to the design flow used for the baseline design, the
following changes are made for simple_serdes_design_pcs_bypass:
1. Change in using ACE GUI during wrapper generation.
2. Change in RTL code.
Note: There will be no change required for placement-constraint (ace_placement.pdc) and
timing-constraint (ace_constraint.sdc) when compared to the files used for the baseline
design.
UG028, July 1, 2014
93
Page 94

Note: Although the PCS modules are disabled, the SerDes will still generate two clocks for
transmit and receive ends (from PMA). Unlike the design with EFIFO enabled
(simple_serdes_design_efifo), these two clocks are not aligned.
The changes for this derivative of the design are presented below.
Modification – 1 (ACE GUI):
Mode – a (Bypassing PCS Modules without Disabling PCS): While generating GUI wrapper for
this derivative, we need to disable the followings:
1. 8b/10b encoder module in RX PCS Settings window,
2. Symbol alignment module in RX PCS Symbol Alignment window, and
3. 8b/10b decoder in TX PCS Settings window.
Details on these windows have been presented while explaining the design flow for the
baseline design.
Mode – b (Disabling PCS that essentially disables all PCS blocks): In this mode, the PCS block is
completely disabled.
This can be done by disabling the PCS from ACE GUI as shown in
Figure 41 Disabling PCS from ACE GUI. Please note that for the baseline design
simple_serdes_design, the box was left unchecked (Figure 31: PCS Settings Window – First
page).
Modification – 2 (Design RTL): With respect to the sample design (simple_serdes_design), this
variant with PCS bypassed will require only one change in top-level design due to the fact
that comma character is not longer required. Corresponding changes in the module
data_generation is presented below:
module data_generation (
input clk,
input rst_n,
input data_gen_en,
output [39:0] data_out
);
always @ (posedge clk)
begin
if (rst_n == 1'b0)
data_out <= 40’b0;
// *** Comment out the comma-character generation
// *** data_out <= {10'h000,10'h1BC,10'h000,10'h1BC};
else if (data_gen_en == 1’b1)
// when data-generation enabled, i.e. TX_ready from SerDes is up
// *** Logic for data-generation goes here, such as PRBS-7 ***
else
data_out <= 40’b0;
// *** Comment out the comma-character generation
// ***data_out <= {10'h000,10'h1BC,10'h000,10'h1BC};
end
endmodule
94 UG028, July 1, 2014
Page 95

Note: When compared with the sample design (simple_serdes_design), no change is required in
ace_placement.pdc or in ace_constraint.sdc files for this derivative
(simple_serdes_design_pcs_bypassed). The instantiation of the SerDes wrapper will remain
same.
Figure 41: Disabling PCS from ACE GUI
Bypassing PCS by Manually Overriding Corresponding Register
This section presents use an alternative approach for bypassing PCS through the Advanced
section in ACE GUI. This is presented for demonstration purpose only.
The PCS blocks can be bypassed by modifying the value stored in the PCS register 17A. More
specifically, the bit-4 of the PCS register 17A needs to be set at 1’b1 to bypass the PCS block.
The values of the PCS/PMA registers can be overridden by using the Advanced section of the
ACE GUI. The user can reach Advanced section by selecting the link in the Outline window
(“Figure 24: Outline Window”).
Clicking Next button will bring the page titled Register Settings – Lane 0 as shown in “Figure
42 Modifying Register Settings from ACE GUI”. This page has several fields:
1. Start Address, End Address and Function. These fields are used to search for a
specific PCS register. The hexadecimal address is used for both PCS and PMA
registers.
2. A table displaying the list of AHB addresses (1st column: AHB Address) and the
corresponding values set by ACE (3rd column: Value). The 2nd column (Override
Value) will display the values that are entered as overriding value, such as bit-4 of
Reg17A.
3. Two text boxes for AHB Address and Override Value. To enter the value that will
override the default value of a register. Both of these entries need to be in
hexadecimal format.
UG028, July 1, 2014
4. A table that shows the details on each bit for the register that corresponds to the
address typed in AHB Address text-field.
95
Page 96

Figure 42: Modifying Register Settings from ACE GUI
To bypass the PCS block, the bit-4 of Reg[17A] needs to be set to 1’b1, i.e., 17A needs to be set
at 8’h10. To do that, the user needs to follow the steps listed below:
• Type 17A in start address and hit tab on keyboard to have the address 17A.
• Select 17A on the table in the middle so that ‘17A’ is displayed in the text-field titled
AHB address.
• type ‘10’ (8’h10) in the text-field for Override Value (“Figure 43 Changing Value of
Register 17A to bypass PCS block”).
• Click Generate button to generate the GUI wrapper.
96 UG028, July 1, 2014
Page 97

Figure 43: Changing Value of Register 17A to bypass PCS block
Note: Setting Reg[17A] at 8’h10 will automatically disable all PCS modules even if they are
not disabled individually in ACE GUI.
UG028, July 1, 2014
97
Page 98

Dynamic Read/Write of SerDes Registers via SBUS
This chapter broadly categorizes the PMA and PCS registers into:
1. Static registers
2. Dynamic registers
While the static registers are hardcoded into ACE generated GUI, the dynamic registers can
be modified runtime. This chapter details the macros that can be used to modify the dynamic
PCS/PMA registers.
Typically, SerDes registers are programmed during FPGA configuration, and there is no need
to program them dynamically. One common case where registers need to be programmed
dynamically is to set loopback mode.
In this chapter, we first present the overview of the SerDes register access through SBUS. We
then present a micro-controller that executes one or more sequences of SBUS register
accesses. Finally, we present an example of existing ACE macros for using SBUS interface; the
example presents the case where the user wants to set the SerDes loopback mode.
Overview
The Serdes has a serial interface, called SBUS, through which the user design can read and
write internal registers. The ACX_SERDES_SBUS_IF module provides parallel-to-serial
conversion for this interface. (Other I/O ring components have an SBUS interface as well.)
To enable SerDes register access through SBUS, the user needs to use the following in the
code.
`include "speedster22i/macros/ACX_SERDES_SBUS_IF.v"
Alternatives for using SBUS interface for SerDes register access:
There are several ways of using SBUS interface for SerDes register access:
• The user can use the ACX_SERDES_SBUS_IF module that is a relatively low-level
interface.
• Rather than using ACX_SERDES_SBUS_IF module, wrappers for common
configurations can be created using ACX_SERDES_REG_CTRL.
• For some purposes, ACE library provides wrapper macros. For instance, for the
common case of setting loopback mode using SBUS interface, the user can use the
macro ACX_SERDES_LOOPBACK_CTRL; this macro automatically configures
loopback mode once the SerDes is ready.
• Each of the above requires using SBUS interface to access PMA/PCS registers. The
BitPorter perspective in the Ace GUI has a JTAG Browser tab, which allows reading
and writing the SerDes register values interactively through the JTAG interface. This
gives access to the same registers as the SBUS interface.
Note: Both ACX_SERDES_REG_CTRL and ACX_SERDES_LOOPBACK_CTRL calls the lowlevel ACX_SERDES_SBUS_IF under the hood.
98 UG028, July 1, 2014
Page 99

ACX_SERDES_SBUS_IF Module
The connection diagram for ACX_SERDES_SBUS_IF is shown in “Figure 44 Disabling PCS
Decoder (default ACE Setting)”.
Figure 44: Disabling PCS Decoder (default ACE Setting)
The code below presents the port definitions in ACX_SERDES_SBUS_IF module
module ACX_SERDES_SBUS_IF (
input sbus_clk,
input rstn,
input sbus_sw_rst, // active-high; may be tied low
// serdes connections
input [1:0] from_sbus_data,
input from_sbus_ack,
output [1:0] to_sbus_data,
output to_sbus_req,
output to_sbus_sw_rst,
// parallel interface
input i_reg_rw_req, // rising edge starts action
input i_reg_write, // request is 'write'
input i_reg_pma, // address is pma address
input [15:0] i_reg_address, // 16-bit pcs or pma address
input [7:0] i_reg_wr_data, // data for write
output [7:0] o_reg_rd_data, // data from read (latch when o_reg_rdwr_valid)
output reg o_reg_rdwr_valid // action finished (high for one cycle)
);
UG028, July 1, 2014
99
Page 100

The Ports of ACX_SERDES_SBUS_IF Module:
The signals (ports) shown in “Figure 43 Changing Value of Register 17A to bypass PCS
block” and “The Ports of ACX_SERDES_SBUS_IF Module:” are detailed now.
General signals:
Port sbus_clk: There should be one ACX_SERDES_SBUS_IF instance per SerDes lane. For
each lane, a clock signal is required to drive both the SerDes (input ports ch0_i_sbus_clk etc.)
and ACX_SERDES_SBUS_IF (input port sbus_clk). The sbus_clk may be shared with multiple
Serdes lanes. The sbus_clk is normally generated by a PLL, and, for practical reasons, should
be 50MHz or less. You cannot use the RX or TX clock for this.
Port rstn: The active-low rstn signal must be asserted briefly at start-up to initialize the
interface. Deassertion should be synchronous to sbus_clk.
Port sbus_sw_rst: The synchronous sbus_sw_rst signal is optional. It can be used with a
timeout counter: when a timeout occurs, sbus_sw_rst is asserted (active-high) to reset the
internal state machine to its start state. However, unless there is some internal failure, no
timeout should occur. If this mechanism is not needed, the sbus_sw_rst pin can be tied to
GND. (If you want to add a timeout, allow at least 64 cycles per read or write.)
SerDes signals:
SerDes interface ports – from_sbus and to_sbus: As shown in “Figure 45 Connections for
ACX_SERDES_LOOPBACK_CTRL”, the from_sbus inputs must be driven by the matching
SerDes outputs, and the to_sbus output must drive the matching SerDes inputs. The user will
also find an example of this constraint when we will present the example of setting loopback
mode using SBUS interface.
Parallel Interface signals:
Ports i_reg_rw_req and o_reg_rdwr_valid: A register read or write is triggered by a rising
edge on i_reg_rw_req, and completion is signaled by o_reg_rdwr_valid.
Port i_reg_write and i_reg_wr_data: The i_reg_write input indicates whether the requested
action is a read or a write. For a write, the 8-bit register value is passed via i_reg_wr_data. All
inputs (data and address) are registered internally by the interface.
Ports i_reg_pma and i_reg_address: The SerDes has two sets of registers, PCS registers and
PMA registers. Both have their own 16-bit address space (not all addresses are used). If
i_reg_pma is high, i_reg_address is a PMA address; otherwise it is a PCS address.
Port o_reg_rdwr_valid and o_reg_rd_data: Completion of a read or write is signaled by
o_reg_rdwr_valid high. This signal is high for only one cycle. For a read, the register value is
available on o_reg_rd_data, but only for the cycle where o_reg_rdwr_valid is high. You can
latch this signal as:
if (!i_reg_write && o_reg_rdwr_valid)
my_reg <= o_reg_rd_data;
Note: A write operation writes all 8 bits of the register. To modify only selected bits, you
need to perform a read-modify-write: read the register value, modify the value locally, then
write the result back.
100 UG028, July 1, 2014
 Loading...
Loading...