

Page 1

DCS Thyristor power converter
for DC drive systems
20 to 1000 A
9 to 522 kW
Manual
DCS 400
II K 1-1
Page 2

This manual is valid for DCS 400 Rev A including software version 108.0
List of contents
MANUAL
1 DCS 400 - the compact-size DC drive ........ II K 1-3
2 System overview of DCS 400 .................... II K 2-1
2.1 Environmental conditions .............................................
2.2 DCS 400 power converter modules ............................
2.3 DCS 400 overload withstand capability ......................
2.4 Control and Display Units of the DCS 400 .................
3 Technical Data ............................................ II K 3-1
3.1 Module Dimensions .......................................................
3.2 Cross-sectional areas - Tightening torques ..................
3.3 Power losses .................................................................
3.4 Power section cooling ...................................................
3.5 Control board SDCS-CON-3A ......................................
3.6 Power interface board SDCS-PIN-3A ...........................
3.7 Field exciter SDCS-FIS-3A .........................................
3.8 Circuit diagrams ..........................................................
4 Overview of software.................................. II K 4-1
4.1 General inormation about application Macros ..............
4.2 Application Macros ........................................................
4.3 Digital and analogue Inputs/Outputs ...........................
4.4 Drive Logic ..................................................................
4.5 Regulator functions .....................................................
4.6 Software Structure ......................................................
4.7 Parameter list ..............................................................
II K
II K
II K
II K
II K
II K
II K
II K
II K
II K
II K
II K
II K
II K
II K
II K
II K
II K
II K
2-2
2-3
2-4
2-5
3-1
3-3
3-5
3-6
3-7
3-9
3-10
3-12
4-2
4-4
4-22
4-24
4-27
4-42
4-44
5 Installation ................................................... II K 5-1
5.1 Safety instructions .........................................................
5.2 EMC Compliant Installation and Configuration for PDS
5.3 Connection Examples ................................................. II K 5-17
II K
II K
5-2
5-4
6 Operating Instructions ............................... II K 6-1
6.1 Panel .............................................................................
6.2 Guided Commissioning .................................................
6.3 Useful hints for commissioning ...................................
6.4 Troubleshooting ..........................................................
II K
II K
II K
II K
6-2
6-7
6-20
6-24
7 Serial interfaces .......................................... II K 7-1
7.1 Panel-port ......................................................................
7.2 RS232-port ....................................................................
7.3 Fieldbus interface ..........................................................
II K
II K
II K
7-6
7-7
7-8
Appendix
A Accessories .......................................................................
Line chokes ...................................................................
Fuses .............................................................................
EMC filter .......................................................................
B Declaration of conformity ..................................................
C Quick Installation & Commissioning guide .......................
D Examples for basic parameter programming ...................
II K
II K
II K
II K
II K
II K
II K
A-1
A-1
A-4
A-6
B-1
C-1
D-1
Index
II K 1-2
Page 3
1 DCS 400 - the compact-size DC drive
DCS 400 is a new generation of DC drives, which
is rated from 9 to 522 KW and for use on all line
supply voltages from 230 to 500 V.
Total ease of use
designers. The result is a DC drive that meets the
needs of machine builders. It is:
I
as easy to handle as an analogue drive but with
all the advantages of a digital drive
I
easy to design into machine equipment, being
compact and having just the right number of
features
I
easy to install and set up
The DCS 400 is an
latest semiconductor technology together with
an advanced software which helps to reduce
maintenance, increase product reliability and
enables extremely rapid commissioning.
The DCS 400's small size brings substantial space
savings to machine builders, allowing them to
was the brief given to the drive`s
innovative design
, using the
integrate more accessories within the same space.
The compact design has been partly achieved by
a fully integrated field exciter, which includes the
field fuse and choke.
Based on
exciter, there is no need for a field voltage
adaptation transformer to match the line supply
voltage with that of the motor.
The
trol panel and the PC tool - makes start up of the
drive extremely easy, by simply guiding the user
through the start up procedure.
In addition, the DCS 400 contains
macros
user can pre-select the software structure and
the I/O connection, thus saving time and elimi-
nating any errors.
The DCS 400 carries the CE Mark and is designed
and produced according to the quality standard
ISO 9001.
new IGBT technology
commissioning wizard
. By selecting a macro from a menu, the
used for the field
-available on the con-
application
II K 1-3
Page 4

DCS 400 - the compact-size DC drive
Unit functions
Drive functions
Speed ramp function generator (S-ramp,
2 accel / decel ramps)
Speed feedback via tacho, encoder, EMF
Speed controlling
Torque / current reference processing
External torque limitation
Current controlling
Automatic field weakening
Automatic optimization for armature-circuit
current, field current, speed controller, EMF
regulator, flux adaptation
Speed monitor
On/Off control logic
Remote/local operation
Emergency stop
Automatic phase sequence detection
Motor overload detection
Internal motor potentiometer function for the
speed reference
Jog function
Configuration macros
Activation and operator-control
analogue and digital
fieldbusses
MMC
(man-machine communication) via:
Drive Window Light
(start-up and maintenance program) PC pro-
grams can be run under all commonly used
Windows® environments (3.1x, 95,98, NT):
Parameter programming
Fault detection
Feedback display and analysis
Fault logger
DCS400PAN
Removable control and display panel with
plain text display for:
Guided
Parameter programming
Fault detection
Reference and feedback display
Local operation
commissioning
inputs
and
outputs
Monitoring functions
Self-test
Fault logger
Motor monitoring
Speed feedback error
Overtemperature (PTC evaluation)
Overload (I² t)
Overspeed
Stalled motor
Armature-circuit overcurrent
Armature-circuit overvoltage
Minimum field current
Field overcurrent
Power converter protection
Overtemperature
Watchdog function
Mains voltage interruption
Thyristor diagnosis
II K 1-4
Page 5

2 System overview of DCS 400
)LHOGVXSSO\
6'&6),6$
M
U
H
W
O
L
I
&
0
(
F1
Q1
115 / 230 V AC
L1
K1
0
/HJHQG
Q
R
L
W
D
O
R
V
L
F
L
Q
D
Y
O
Q
D
J
J
Q
L
$
J
V
R
L
Q
V
W
L
&
W
9
E
L
$
E
9
W
W
X
X
W
S
S
X
W
W
W
S
X
X
X
Q
R
R
L
S
W
H
H
X
Q
X
X
L
R
J
J
O
\
R
D
R
O
O
W
D
L
O
D
D
J
H
Q
Q
L
5
D
$
G
230...500V
115...230 V AC
1
U
R
&
O
/
&
R
3
R
3
7
Fig. 2/1: System overview of DCS 400
RS232
T
$
U
1
,
H
3
Z
R
6
3
&
'
6
V
F
L
$
Q
R
U
1
W
F
2
H
O
&
H
6
O
'&6
R
&
U
W
'
Q
6
R
&
U
1
$
3
6
&
'
O
R
W
R
U
V
W
L
U
Q
\
R
K
F
7
6HULDO
LQWHUIDFHV
\
O
S
S
X
6
O
H
Q
D
S
O
R
U
W
Q
R
&
O
R
G
U
O
W
H
L
Q
R
)
F
V
W
X
S
W
X
2
V
P
W
X
µ
S
Q
,
2
82
4
optical fibre
[
[
[
[
1
T
&
V
/
X
3
E
H
G
O
K
H
W
L
R
)
W
II K 2-1
Page 6
2.1 Environmental conditions
System overview of DCS 400
Mains supply - power part
Voltage, 3-phase: 230 to 500 V in acc. with IEC 38
Voltage deviation: ±10% permanent
Rated frequency: 50 Hz or 60 Hz
Static frequency deviation: 50 Hz ±2 %; 60 Hz ±2 %
Dynamic: frequency range: 50 Hz: ±5 Hz; 60 Hz: ± 5 Hz
df/dt: 17 % / s
Mains supply - Electronics supply
Voltage, 1-phase: 115 to 230 V in acc. with IEC 38
Voltage deviation: -15% / +10%
Frequency range: 45 Hz to 65 Hz
Degree of protection
Power converter module: IP 00
Paint finish
Power converter module, cover: RAL 9002 light-grey
housing: RAL 7012 dark-grey
Current reduction to (%) for armature circuit and field supply
100
90
80
70
60
Environmental limit values
Permissible ambient temp. with rated current I
Ambient temp., power conv. module:+40°C to 55°C; s. Fig. 2.1/2
: +5 to +40°C
DC
Alteration in the ambient temp.: < 0,5°C / minute
Storage temperature: -40 to +55°C
Transport temperature: -40 to +70°C
Relative humidity: 5 to 95%, no condensation
Pollution degree: Grade 2
Site elevation:
<1000 m above M.S.L.: 100%, without current reduction
>1000 m above M.S.L.: with current reduct., s. Fig. 2.1/1
Vibration converter module: 0,5 g; 5 Hz to 55 Hz
Noises: Size as module
(1 m distance)
A1 55 dBA
A2 55 dBA
A3 60 dBA
A4 66...70 dBA, dependent on fan
Current reduction to (%) for armature circuit and field supply
110
100
90
80
50
1000 2000 3000 4000 5000
Fig. 2.1/1: Effect of the site elevation above sea level on the
power converter's load capacity
m
70
30 35 40 45 50 55
Fig. 2.1/2: Effect of the ambient temperature on the converter
module load capacity.
Compliance with standards
The power converter modules and cubicles are designed for industrial applications.
Within the EU, the components satisfy the requirements European guidelines, shown
in the table below.
European Union Directive Manufacturer’s Assurance
Machinery Directive
89/392/EEC
93/68/EEC
Low Voltage Directive
73/23/EEC
93/68/EEC
EMC Directive
89/336/EEC
93/68/EEC
Declaration of
Incorporation
Declaration of Conformity
Declaration of Conformity.
Provided that all installation
instructions concerning
cable selection, cabling and
EMC filters or dedicated
transformer are followed.
EN 60204-1
[IEC 204-1]
EN 60146-1-1
[IEC 146-1-1]
EN 50178 [IEC --]
see additional
IEC 664
EN 61800-3
[IEC 1800-3]
where limits are under consideration
EN 50081-2 / EN 50082-2 has been supplied
¥
’Installation in accordance with EMC’
The Technical Construction File to which this
Declaration relates has been assessed by
Report and Certificate from ABB EMC
Certification AB being the Competent Body
according to the EMC Directive.
Harmonized Standards
Converter module
¥
in accordance with 3ADW 000 032
under preparation
°C
Standards in North America
In North America, the system components
satisfy the requirements as listed in the
table below.
Safety for Power
conversion Equipment
≤ 600 V
Industrial control
Equipment: industrial
products ≤ 600 V
Standard for module
UL 508 C
CSA C 22.2. No.1495
Planned for 2000
Please note:
applies for power converter modules only.
II K 2-2
Page 7
2.2 DCS 400 power converter modules
Sizes
System overview DCS 400
Size A1
Size Current Dimensions Weight Min. Clearances Fan connection Fuses
range H x W x D appr. top/butom/side
A1 20...25 A 310x270x200 11 150x100x5 - external
A1 45...140 A 310x270x200 11 150x100x5 115/230 V/1 ph external
A2 180...260 A 310x270x270 16 250x150x5 115/230 V/1 ph external
A3 315...550 A 400x270x310 25 250x150x10 115/230 V/1 ph external
A4 610...1000 A 580x270x345 38 250x150x10 ➀ 230 V/1 ph external
Table 2.2/1: Sizes of DCS 400
Size A2
[mm] [kg] [mm]
Size A3
Size A4
➀ Fan with 115 V/1 ph
available as option
Unit table
DCS 401 2-quadrant converter DCS 402 4-quadrant converter
Converter type Line voltage
I
[A] I
DC
DCS401.0020 20 16 4 9 12
DCS401.0045 45 36 6 21 26
DCS401.0065 65 52 6 31 39
DCS401.0090 90 74 6 41 52
DCS401.0125 125 102 6 58 73
DCS401.0180 180 147 16 84 104
DCS401.0230 230 188 16 107 133
[A] IF [A] P [kW] P [kW]
AC
400 V 500 V
Converter type Line voltage
Size
I
[A] I
DC
DCS402.0025 25 20 4 10 13
A1
DCS402.0050 50 41 6 21 26
A1
DCS402.0075 75 61 6 31 39
A1
DCS402.0100 100 82 6 41 52
A1
DCS402.0140 140 114 6 58 73
A1
DCS402.0200 200 163 16 83 104
A2
DCS402.0260 260 212 16 108 135
A2
[A] IF [A] P [kW] P [kW]
AC
400 V 500 V
DCS401.0315 315 257 16 146 183
DCS401.0405 405 330 16 188 235
DCS401.0500 500 408 16 232 290
DCS401.0610 610 498 20 284 354
DCS401.0740 740 604 20 344 429
DCS401.0900 900 735 20 419 522
Table 2.2/2: DCS 401 unit table
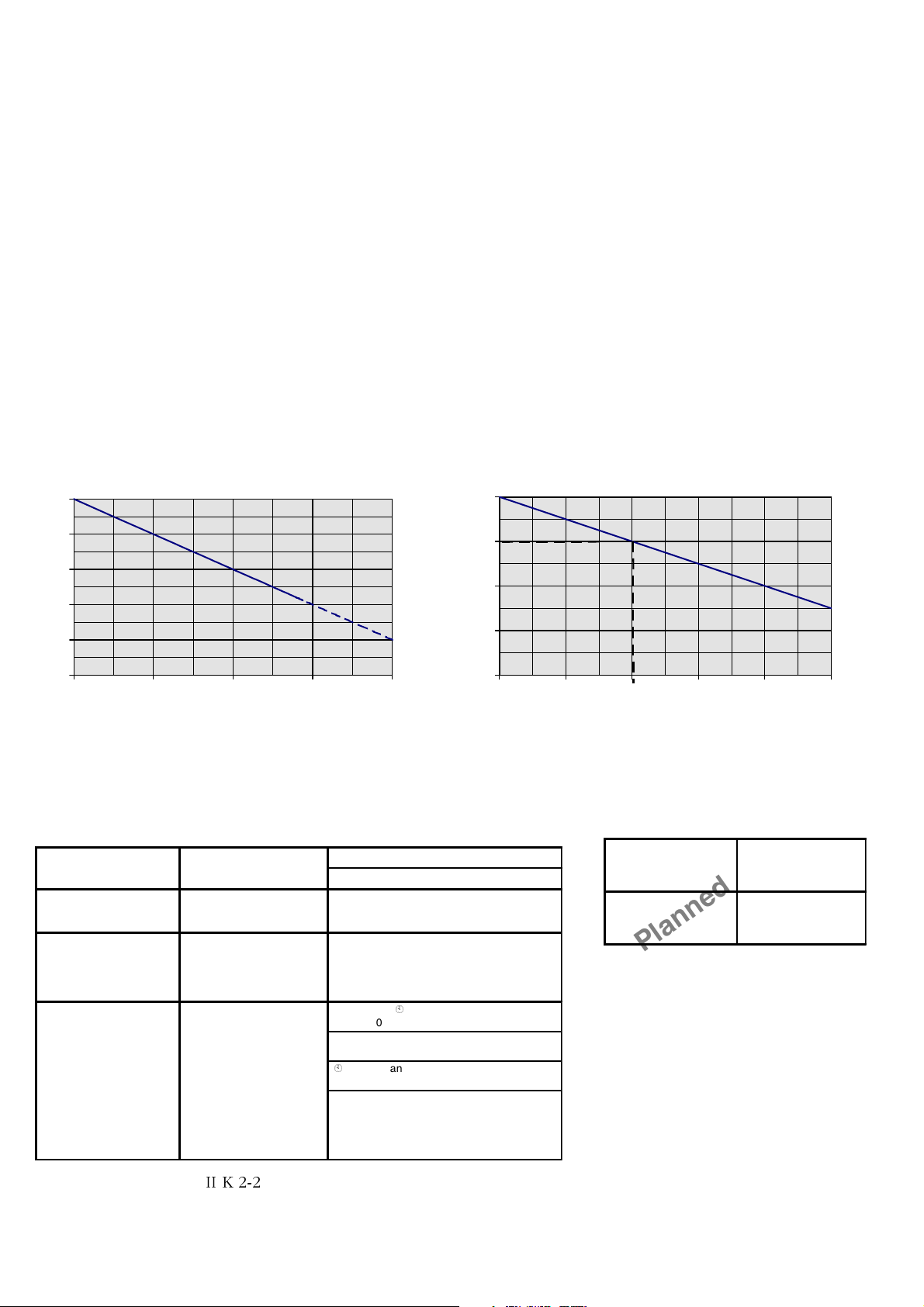
DC voltage characteristic
The DC voltage characteristics are calculated
according to:
U
= rated supply voltage, 3-phase
VN
Voltage tolerance ±10 %
()
88
91G
cos a = 0.966 (2-Q)
0.866 (4-Q)
α
cos*35.1*%10−=
DCS402.0350 350 286 16 145 182
A3
DCS402.0450 450 367 16 187 234
A3
DCS402.0550 550 448 16 232 290
A3
DCS402.0680 680 555 20 282 354
A4
DCS402.0820 820 669 20 340 426
A4
DCS402.1000 1000 816 20 415 520
A4
Table 2.2/3: DCS 402 unit table
System con- DC voltage
nection voltage (max. Motor voltage)
U
vN
230 270 240
380 460 400
400 470 420
415 490 430
440 520 460
460 540 480
480 570 500
500 600 520
Table 2.2/4: Recommended DC voltage with specified input voltage
2Q ➀ 4Q
U
d
➀ in case of a 2-Q convert-
er, which is used in regenarative mode, please
use 4-Q voltage values
II K 2-3
Page 8
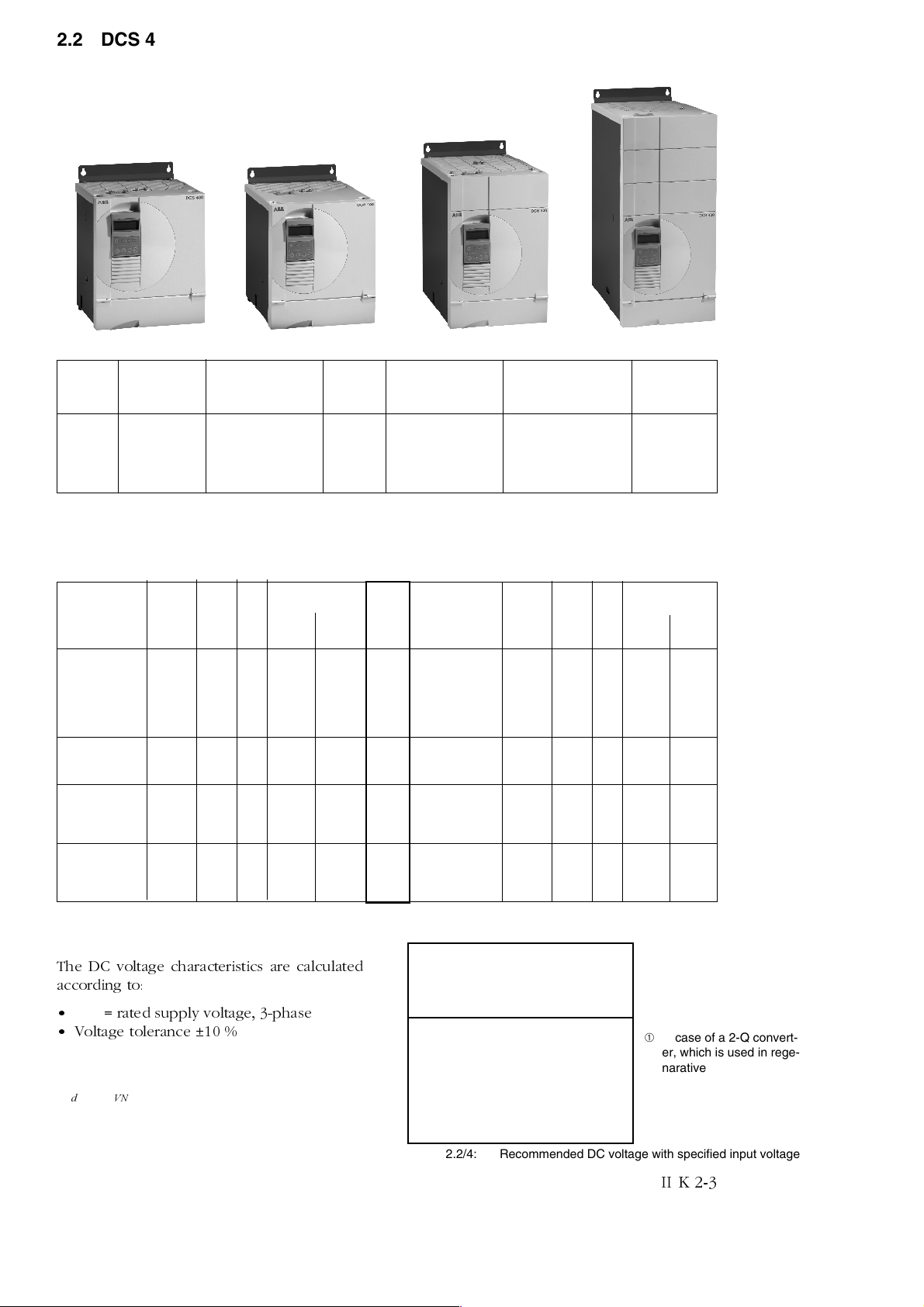
2.3 DCS 400 overload withstand capability
To match a drive systems components as efficiently as possible to the
driven machines load profile, the power converters can be dimensioned by
means of the load cycle. Load cycles for driven machines have been defined
in the IEC 146 or IEEE specifications, for example.
The characteristics are based on an ambient temperature of max. 40°C and an
elevation of max. 1000 m.
Types of load
Operating Load Typical applications Load cycle
cycle for converter
System overview of DCS 400
DC I I
DC II I
DC III I
DC IV I
continuous (IdN) pumps, fans
DC I
for 15 min and extruders, conveyor belts
DC II
1,5 * I
DC III
1,5 * I
DC IV
2 * I
for 60 s
DC II
for 15 min and extruders, conveyor belts
for 120 s
DC III
for 15 min and
for 10 s
DC IV
150%
150%
200%
Table 2.3/1: Definition of the load cycles
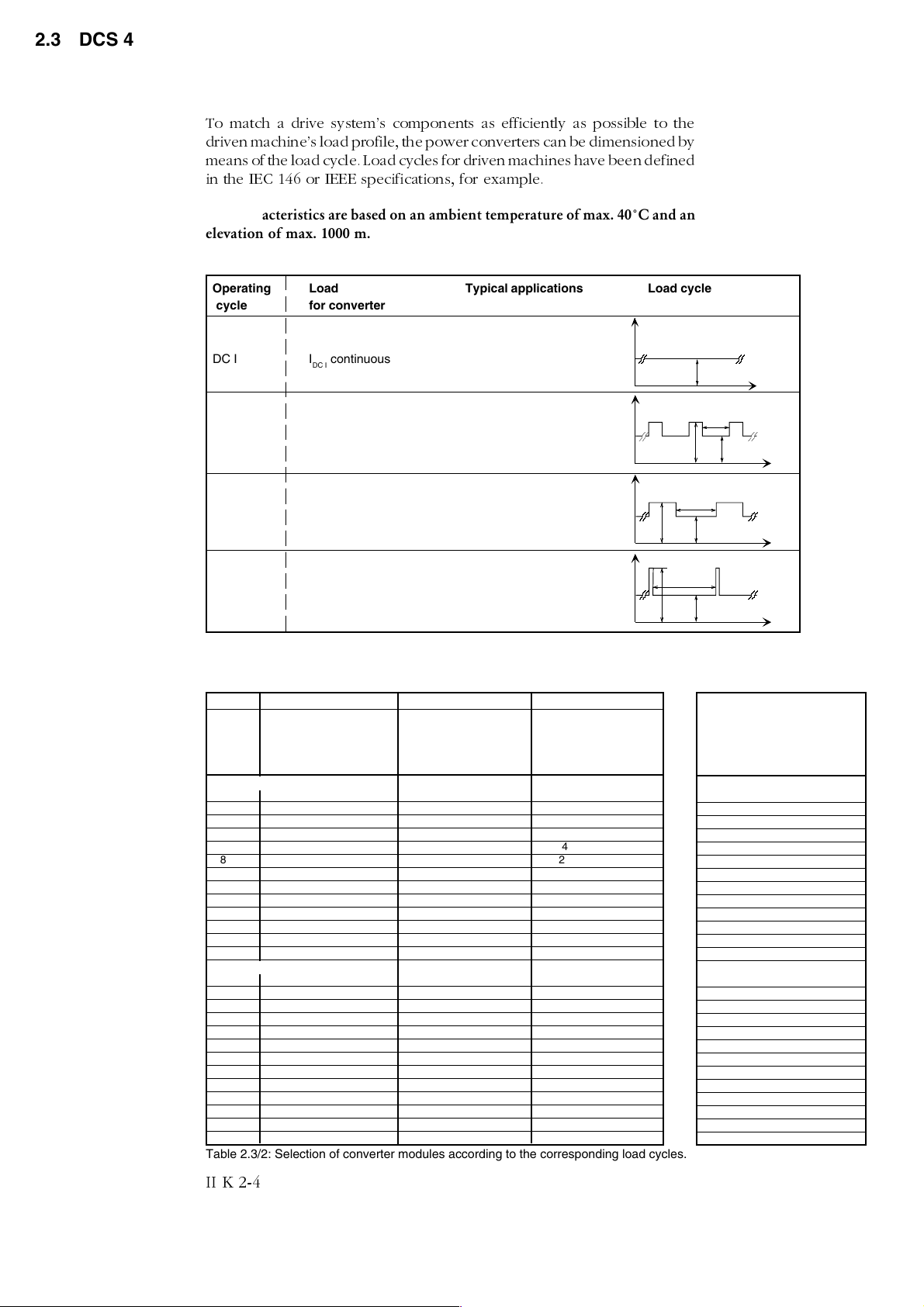
Load cycles of driven machines
DC I DC II DC III DC IV
I
DC I
contin- 100 % 150 % 100 % 150 % 100 % 200 %
uous 15 min 60 s 15 min 120 s 15 min 10 s
[A] [A] [A] [A]
2-quadrant applications
20 18 27 18 27 18 36
45 40 60 37 56 38 76
65 54 81 52 78 55 110
90 78 117 72 108 66 132
125 104 156 100 150 94 188
180 148 222 144 216 124 248
230 200 300 188 282 178 356
315 264 396 250 375 230 460
405 320 480 310 465 308 616
500 404 606 388 582 350 700
610 490 735 482 723 454 908
740 596 894 578 867 538 1076
900 700 1050 670 1005 620 1240
4-quadrant applications
25 23 35 22 33 21 42
50 45 68 43 65 38 76
75 66 99 64 96 57 114
100 78 117 75 113 67 134
140 110 165 105 158 99 198
200 152 228 148 222 126 252
260 214 321 206 309 184 368
350 286 429 276 414 265 530
450 360 540 346 519 315 630
550 436 654 418 627 380 760
680 544 816 538 807 492 984
820 664 996 648 972 598 1196
1000 766 1149 736 1104 675 1350
Table 2.3/2: Selection of converter modules according to the corresponding load cycles.
I
DC II
I
DC III
I
DC IV
ð
100%
15 min
100%
15 min
100%
15 min
100%
Recommended
Converter type
Converter type
2-quadrant converter
DCS 401.0020
DCS 401.0045
DCS 401.0065
DCS 401.0090
DCS 401.0125
DCS 401.0180
DCS 401.0230
DCS 401.0315
DCS 401.0405
DCS 401.0500
DCS 401.0610
DCS 401.0740
DCS 401.0900
4-quadrant converter
DCS 402.0025
DCS 402.0050
DCS 402.0075
DCS 402.0100
DCS 402.0140
DCS 402.0200
DCS 402.0260
DCS 402.0350
DCS 402.0450
DCS 402.0550
DCS 402.0680
DCS 402.0820
DCS 402.1000
II K 2-4
Page 9

2.4 Control and Display Units of the DCS 400
System overview DCS 400
For operation, commissioning, diagnosis and for
controlling the drive, there are different possibil-
ities available.
'&63$1
Panel
connection
3&
Fig. 2.4/1: Possibilities of operation
6'&6&21$
X7:
electrical
connection
(RS232)
The coupling to an overriding system (PLC) takes
place over a serial interface with a fibre-optic link
to a field bus adapter.
'&6
X6:
V800
X8:
power supply
PE SHF DG D( N) D(P)SH
X2
optical fibre
10 m
≤
RXD
Nxxx-01
TXD
xxxxxxxx
ADAPTER
XMIT
BUS
TERMINA TION
REC
ERROR
X1
PE SHF DG D( N) D(P)
+24V 0V SH
)LHOGEXV
$GDSWHU
ON
OFF
WR3/&
440V 368A 1500rpm
1500rpm
OUTPUT MENU AUTO OFF LOC <RUN>
Panel DCS 400 PAN
Features
Guided commissioning
(Panel Wizard)
Drive control
Parameter programming
Display of reference and ac-
tual values
Status information
Fault reset
Multilingual
removable during operation
7-Segment display
Features
RAM/ROM memory test error
Program is not running
Normal situation
During download sequence
Alarm
Fault
Fieldbus Adapter
Components:
plastic optical fibre
field bus adaptor
available Fieldbus adapters:
PROFIBUS
AC 31
MODBUS
MODBUS+
CAN-BUS
DeviceNet
You will find more detailed information on data
exchange in the related documentation for field
bus adapters.
II K 2-5
Page 10
System overview of DCS 400
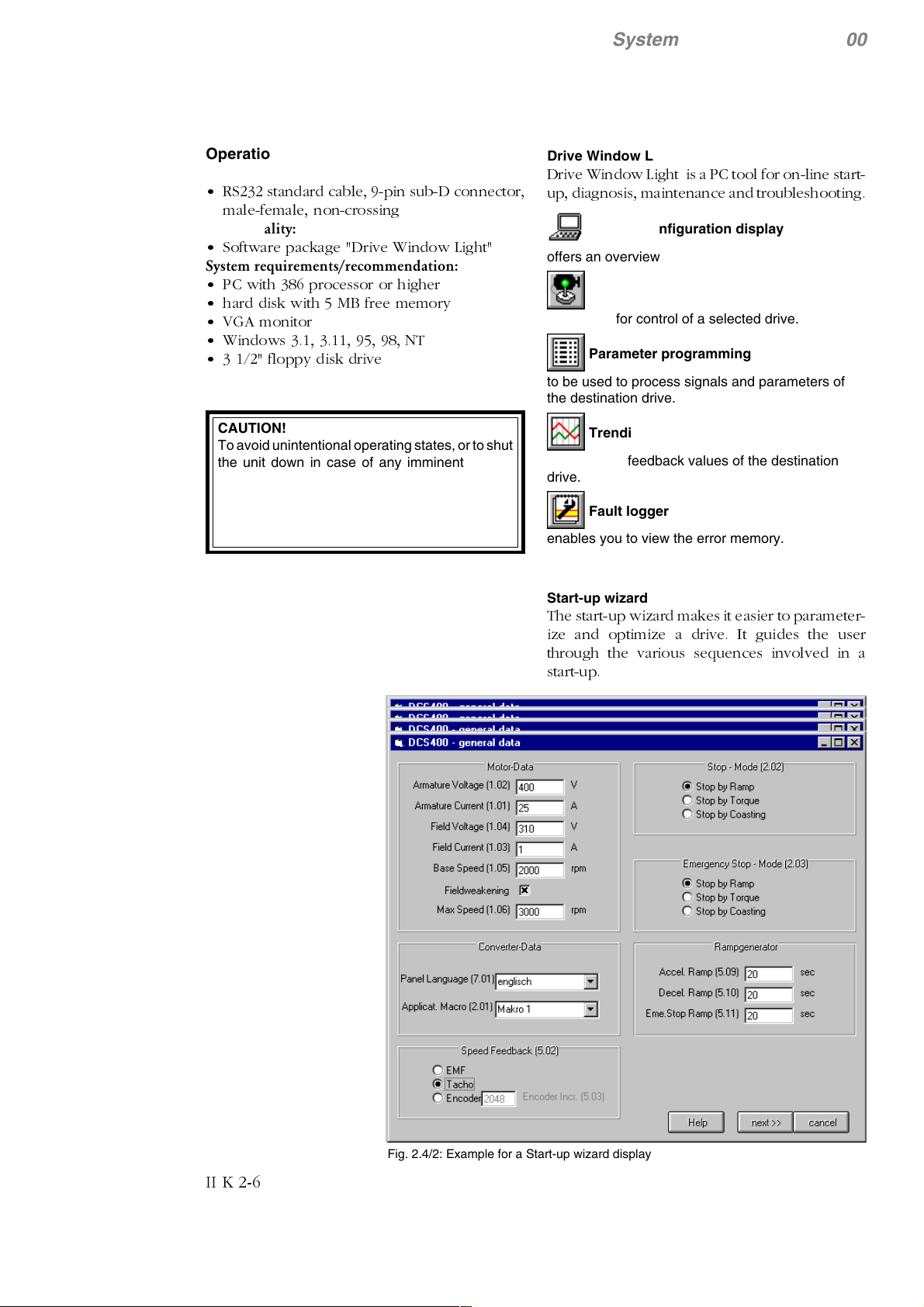
Operation by PC
Components :
RS232 standard cable, 9-pin sub-D connector,
male-female, non-crossing
Functionality:
Software package "Drive Window Light"
System requirements/recommendation:
PC with 386 processor or higher
hard disk with 5 MB free memory
VGA monitor
Windows 3.1, 3.11, 95, 98, NT
3 1/2" floppy disk drive
CAUTION!
To avoid unintentional operating states, or to shut
the unit down in case of any imminent danger
according to the standards in the safety instructions it is not sufficient to merely shut down the
drive via signals 'RUN', drive 'OFF' or 'Emergency
Stop' respectively 'control panel' or 'PC tool'.
Drive Window Light
Drive Window Light is a PC tool for on-line start-
up, diagnosis, maintenance and troubleshooting.
System configuration display
offers an overview the system.
Drive control
to be used for control of a selected drive.
Parameter programming
to be used to process signals and parameters of
the destination drive.
Trending
monitors the feedback values of the destination
drive.
Fault logger
enables you to view the error memory.
Start-up wizard
The start-up wizard makes it easier to parameter-
ize and optimize a drive. It guides the user
through the various sequences involved in a
start-up.
II K 2-6
Fig. 2.4/2: Example for a Start-up wizard display
Page 11

3 Technical Data
3.1 Module dimensions
Module A1
DCS 401.0020
DCS 401.0045
DCS 401.0065
DCS 401.0090
DCS 401.0125
DCS 402.0025
DCS 402.0050
DCS 402.0075
DCS 402.0100
DCS 402.0140
Module A2
DCS 401.0180
DCS 401.0230
DCS 402.0200
DCS 402.0260
Technical data
Module A3
DCS 401.0315
DCS 401.0405
DCS 401.0500
DCS 402.0350
DCS 402.0450
DCS 402.0550
Dimensions in mm
Fig. 3.1/1: Dimension drawing A1, A2, A3-Module
II K 3-1
Page 12

Module A4
DCS 401.0610
DCS 401.0740
DCS 401.0900
DCS 402.0680
DCS 402.0820
DCS 402.1000
Dimensions in mm
Technical data
for M6
for M12
II K 3-2
Fig. 3.1/2: Dimension drawing A4-Module
Page 13
3.2 Cross-sectional areas - Tightening torques
Technical data
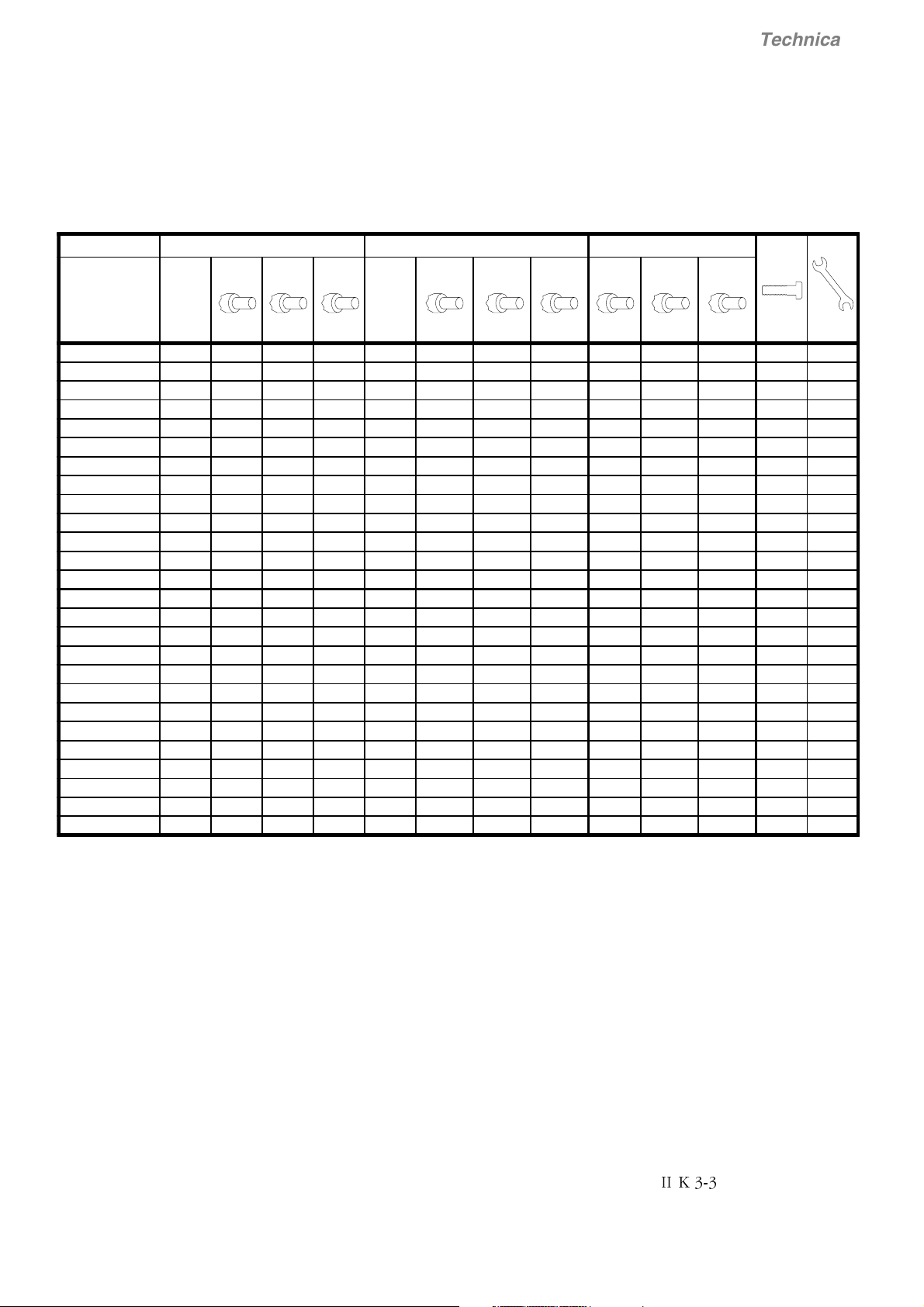
3.2.1 Recommended cross-sectional area to DIN VDE 0276-1000 and DIN VDE 0100-540 (PE), trefoil arrangement, up to 40°C
ambient temperature and a 90°C operating temperature of the conductor.
Unit type
IDC
[A-]
DCS 401.0020 20 1 x 2.5 1 x 1.5 1 x 1.5 16 1 x 2.5 1 x 1.5 1 x 1.5 1 x 2.5 1 x 1.5 1 x 1.5 M6 6
DCS 401.0045 45 1 x 10 1 x 6 1 x 6 36 1 x 6 1 x 6 1 x 4 1 x 6 1 x 6 1 x 4 M6 6
DCS 401.0065 65 1 x 16 1 x 10 1 x 10 52 1 x 16 1 x 10 1 x 6 1 x 16 1 x 10 1 x 6 M6 6
DCS 401.0090 90 1 x 25 1 x 16 1 x 16 74 1 x 25 1 x 16 1 x 16 1 x 16 1 x 16 1 x 16 M6 6
DCS 401.0125 125 1 x 35 1 x 25 1 x 25 102 1 x 35 1 x 25 1 x 25 1 x 16 1 x 16 1 x 16 M6 6
DCS 401.0180 180 1 x 70 1 x 50 1 x 50 147 1 x 50 1 x 50 1 x 35 1 x 25 1 x 25 1 x 16 M10 25
DCS 401.0230 230 1 x 95 1 x 70 1 x 70 188 1 x 70 1 x 70 1 x 50 1 x 35 1 x 35 1 x 25 M10 25
DCS 401.0315 315 2 x 50 1 x 95 1 x 120 257 2 x 50 1 x 95 1 x 95 1 x 50 1 x 50 1 x 50 M10 25
DCS 401.0405 405 2 x 70 2 x 50 1 x 150 330 2 x 70 2 x 50 1 x 120 1 x 70 1 x 50 1 x 70 M10 25
DCS 401.0500 500 2 x 120 2 x 70 2 x 70 408 2 x 95 2 x 70 2 x 70 1 x 95 1 x 70 1 x 70 M10 25
DCS 401.0610 * 610 2 x 150 2 x 95 2 x 95 498 2 x 150 2 x 95 2 x 70 1 x 150 1 x 95 1 x 70 M12 50
DCS 401.0740 * 740 2 x 240 2 x 150 2 x 150 604 2 x 185 2 x 120 2 x 95 1 x 185 1 x 120 1 x 95 M12 50
DCS 401.0900 * 900 2 x 240 2 x 185 2 x 185 735 2 x 240 2 x 150 2 x 150 1 x 240 1 x 150 1 x 150 M12 50
DCS 402.0025 25 1 x 2.5 1 x 2.5 1 x 2.5 20 1 x 2.5 1 x 2.5 1 x 1.5 1 x 2.5 1 x 2.5 1 x 1.5 M6 6
DCS 402.0050 50 1 x 10 1 x 6 1 x 6 41 1 x 10 1 x 6 1 x 4 1 x 10 1 x 6 1 x 4 M6 6
DCS 402.0075 75 1 x 16 1 x 10 1 x 16 61 1 x 16 1 x 10 1 x 10 1 x 16 1 x 10 1 x 10 M6 6
DCS 402.0100 100 1 x 25 1 x 16 1 x 25 82 1 x 25 1 x 16 1 x 16 1 x 16 1 x 16 1 x 16 M6 6
DCS 402.0140 140 1 x 50 1 x 35 1 x 35 114 1 x 35 1 x 25 1 x 25 1 x 16 1 x 16 1 x 16 M6 6
DCS 402.0200 200 1 x 70 1 x 50 1 x 70 163 1 x 70 1 x 50 1 x 50 1 x 35 1 x 25 1 x 25 M10 25
DCS 402.0260 260 1 x 120 1 x 70 1 x 95 212 1 x 95 1 x 70 1 x 70 1 x 50 1 x 35 1 x 35 M10 25
DCS 402.0350 350 2 x 70 1 x 120 1 x 120 286 2 x 50 1 x 120 1 x 95 1 x 50 1 x 70 1 x 50 M10 25
DCS 402.0450 450 2 x 95 2 x 70 2 x 70 367 2 x 70 2 x 70 2 x 50 1 x 70 1 x 70 1 x 50 M10 25
DCS 402.0550 550 2 x 120 2 x 95 2 x 95 465 2 x 120 2 x 70 2 x 70 1 x 120 1 x 70 1 x 70 M10 25
DCS 402.0680 * 680 2 x 185 2 x 120 2 x 120 555 2 x 150 2 x 120 2 x 95 1 x 150 1 x 120 1 x 95 M12 50
DCS 402.0820 * 820 2 x 240 2 x 150 2 x 150 669 2 x 240 2 x 150 2 x 120 1 x 240 1 x 150 1 x 120 M12 50
DCS 401.1000 * 1000 2 x 300 2 x 185 2 x 185 816 2 x 240 2 x 150 2 x 150 1 x 240 1 x 150 1 x 150 M12 50
* Busbar connection 5 x 40 mm is recommended
C1, D1 U1, V1, W1 PE
HO7V
[mm²]
NSGA
FÖU
[mm²]
N2XY
[mm²]Iv[A~]
HO7V
[mm²]
NSGA
FÖU
[mm²]
N2XY
[mm²]
HO7V
[mm²]
NSGA
FÖU
[mm²]
❶
N2XY
[mm²]
1 x M.. [Nm]
Table 3.2/1: Cross-sectional areas - tightening torques DCS 400
❶
You will find instructions on how to calculate the PE
conductor’s cross-sectional area in VDE 0100 or in
equivalent national standards. We would remind you
that power converters may have a current-limiting
effect. This can lead to other values than recommended.
Definition of the recommended cables above:
H07V: DIN-VDE 0281-1; Polyvinyl chloride insulated cables
NSGAFÖU: DIN-VDE 0250-602; Special rubber-insulated single-core cables
N2XY: DIN-VDE 0276-604; Power cable with special fire performance
II K 3-3
Page 14

3.2.2 Cross-sectional areas for UL installations
• The DCS 400 should be installed in an enclosure
that is minimum 150% of the dimensions of converter.
• The DCS 400 is suitable for use in a circuit capable
of delivering not more than 18 kA rms Symetrical
amperes, 500 V AC maximum. Recommended
fuses must be used to provide short circuit protection.
Technical data
Unit type
DCS 401.0020 20 1 x 10 16 1 x 14 12 M6 6
DCS 401.0045 45 1 x 4 36 1 x 6 10 M6 6
DCS 401.0065 65 1 x 3 52 1 x 4 8 M6 6
DCS 401.0090 90 1 x 1/0 74 1 x 2 8 M6 6
DCS 401.0125 125 1 x 2/0 102 1 x 2/0 6 M6 6
DCS 401.0180 180 1 x 4/0 147 1 x 4/0 6 M10 25
DCS 401.0230 230 1 x 350 188 1 x 300 4 M10 25
DCS 401.0315 315 2 x 3/0 257 2 x 3/0 3 M10 25
DCS 401.0405 405 2 x 250 330 2 x 250 2 M10 25
DCS 401.0500 500 2 x 400 408 2 x 350 2 M10 25
DCS 401.0610 610 * 498 * 0 M12 50
DCS 401.0740 740 *604* 0M1250
DCS 401.0900 900 * 735 * ??? M12 50
DCS 402.0025 25 1 x 8 20 1 x 12 10 M6 6
DCS 402.0050 50 1 x 4 41 1 x 6 10 M6 6
DCS 402.0075 75 1 x 2 61 1 x 3 10 M6 6
DCS 402.0100 100 1 x 1/0 82 1 x 1 8 M6 6
DCS 402.0140 140 1 x 2/0 114 1 x 2/0 6 M6 6
DCS 402.0200 200 1 x 250 163 1 x 250 6 M10 25
DCS 402.0260 260 2 x 2/0 212 1 x 400 4 M10 25
DCS 402.0350 350 2 x 4/0 286 2 x 4/0 3 M10 25
DCS 402.0450 450 2 x 300 367 2 x 300 2 M10 25
DCS 402.0550 550 2 x 500 465 2 x 400 1 M10 25
DCS 402.0680 680 *555* 0M1250
DCS 402.0820 820 * 669 * 2/0 M12 50
DCS 401.1000 1000 * 816 * ??? M12 50
* Busbar connection 5 x 40 mm required
C1, D1 U1, V1, W1 PE
IDC
[A-]
Wire
size
[AWG or
MCM]Iv[A~]
Wire
size
[AWG]
Under preparation
Under preparation
Wire
size
[AWG]
1 x M.. [Nm]
Note: 60°C wire up to 100 A, 75°C wire over 100 A
Note: Use UL listed ring terminals for connections to drives
Table 3.2/2: Cross-sectional areas for UL installations of DCS 400
II K 3-4
Page 15
3.3 Power losses
DCS 400 armature circuit
Technical data
Converter type Power losses PL [W]
Load
I
[A] 25% 50% 75% 100%
DC
DCS401.0020 20 10 22 35 49
DCS401.0045 45 25 57 95 145
DCS401.0065 65 38 80 128 181
DCS401.0090 90 48 103 166 236
DCS401.0125 125 65 138 220 311
DCS401.0180 180 96 210 341 490
DCS401.0230 230 116 254 413 594
DCS401.0315 315 163 339 526 726
DCS401.0405 405 218 444 697 969
DCS401.0500 500 236 513 830 1188
2-Quadrant4-Quadrant
DCS401.0610 610 312 653 1025 1427
DCS401.0740 740 380 799 1259 1758
DCS401.0900 900 467 993 1578 2222
DCS402.0025 25 13 28 46 65
DCS402.0050 50 28 65 109 162
DCS402.0075 75 44 95 152 217
DCS402.0100 100 53 116 188 270
DCS402.0140 140 73 157 252 357
DCS402.0200 200 108 238 389 562
DCS402.0260 260 133 293 481 696
DCS402.0350 350 182 265 591 818
DCS402.0450 450 237 499 785 1096
DCS402.0550 550 262 573 933 1342
DCS402.0680 680 349 736 1160 1622
DCS402.0820 820 423 895 1416 1986
DCS402.1000 1000 522 1116 1786 2527
Table 3.3/1: DCS 400 Power losses of armature circuit
Remarks on the table
• The values stated are are maximum values obtained under the most unfavourable conditions.
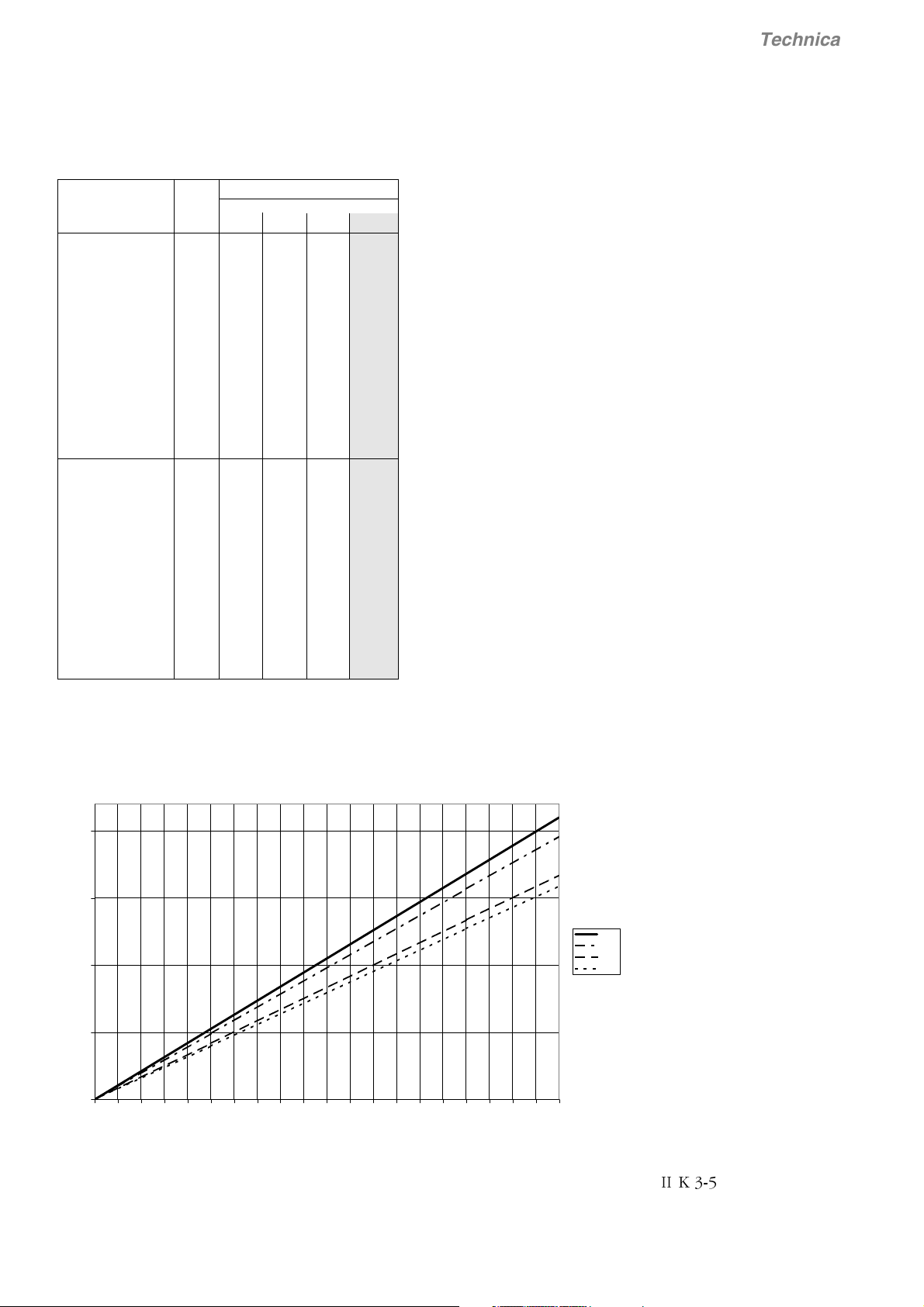
DCS 400 field supply
P
L
200
[W]
150
100
50
0
01234567891011121314151617181920
Fig. 3.3/1: DCS 400 Power losses of field supply
[A]
440V
350V
150V
50V
I
II K 3-5
Page 16
3.4 Power section cooling
Technical data
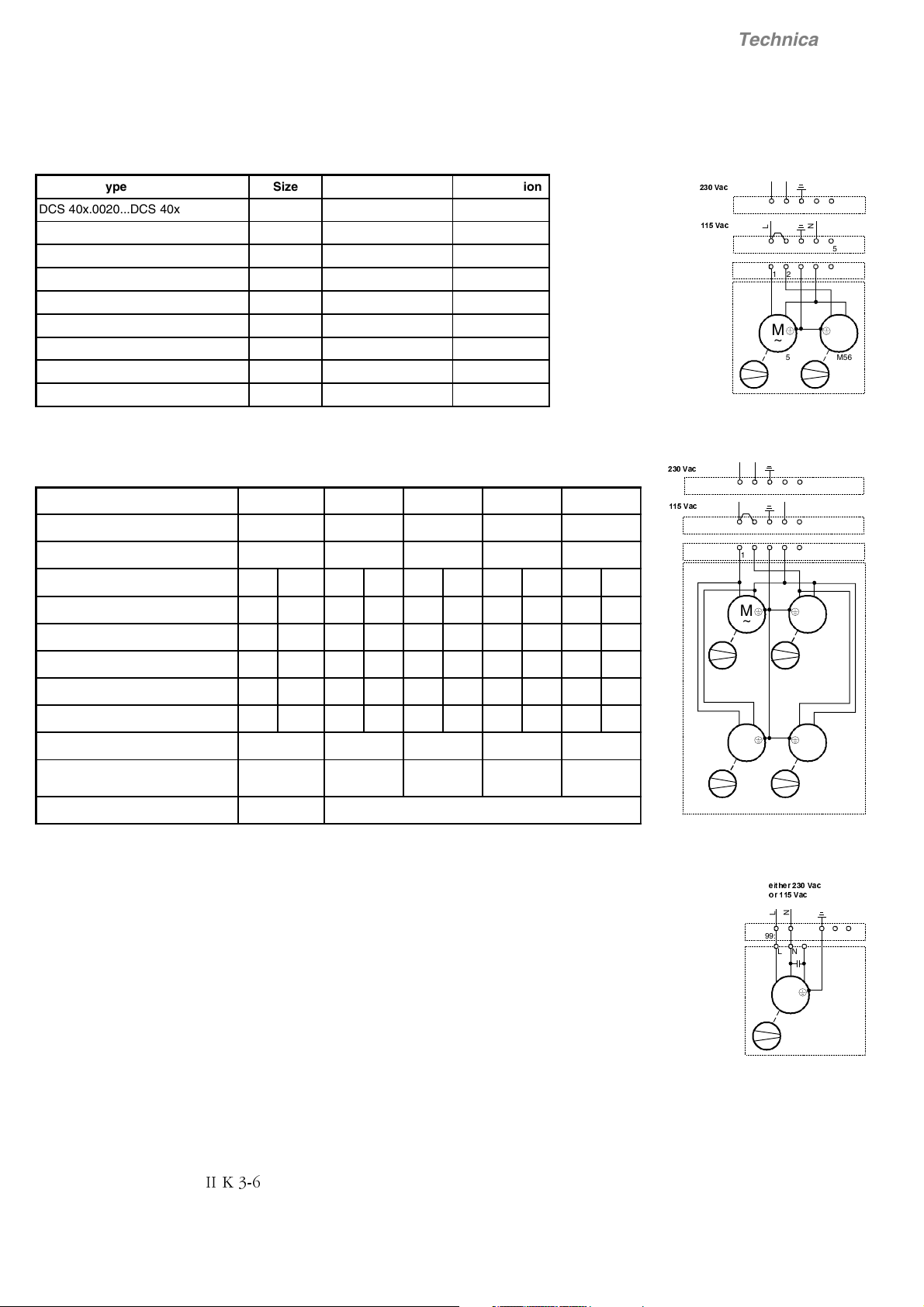
Fan assignment for DCS 400
Converter type Size Fan type Configuration
DCS 40x.0020...DCS 40x.0025 A1 no Fan -
DCS 40x.0045...DCS 40x.0140 A1 2x CN2B2 1
DCS 40x.0180...DCS 40x.0260 A2 2x CN2B2 1
DCS 40x.0315...DCS 40x.0350 A3 2x CN2B2 1
DCS 40x.0405...DCS 40x.0550 A3 4x CN2B2 2
DCS 40x.0610...DCS 40x.0820 A4 1x W2E200 (230 V) 3
DCS 40x.0610. 2...DCS 40x.0820. 2 A4 1x W2E200 (115 V) 3
DCS 40x.0900...DCS 40x.1000 A4 1x W2E250 (230 V) 3
DCS 40x.0900. 2...DCS 40x.1000. 2 A4 1x W2E250 (115 V) 3
Table 3.4/1: Fan assignment for DCS 400
Fan data for DCS 400 (data per fan)
Fan type
Rated voltage [V] 115; 1~ 230; 1~ 115; 1~ 115; 1~ 230; 1~
Tolerance [%] ±10 +6/-10 +6/-10 ±10 +6/-10
Frequency [Hz] 50 60 50 60 50 60 50 60 50 60
CN2B2 W2E200 W2E200 W2E250 W2E250
Fan connection for DCS 400
L
9DF
9DF
N
12 3X99: 45
L
N
12 3X99: 45
12 3X99:
45
M
~
M55 M5 6
M
Configuration 1
L
9DF
9DF
N
12 3X99: 45
L
N
12 3X99: 45
12 3X99:
45
~
Power consuption [W] 16 13 64 80 64 80 120 165 135 185
Current consumption [A] 0.2 0.17 0.29 0.35 0.6 0.7 1.06 1.44 0.59 0.82
Stall current [A] < 0.3 < 0.26 < 0.7 < 0.8 <1.5 <1.8 <1.8 <1.8 <0.9 <0.9
3
Air volume, freely blowing [m
/h] 156 180 925 1030 925 1030 1835 1940 1860 1975
Noise levelt [dBA] 44 48 59 61 59 61 66 67 68 70
Max. ambient temperature [° C] < 60 < 75 < 75 60 60
Useful lifetime of fan
appr. 40000
h/60°
appr. 45000
h/60°
appr. 45000
h/60°
appr. 40000 h appr. 40000 h
Protection Stall Overtemperature
Table 3.4/2: Fan data for DCS 400
Monitoring the DCS 400 power section
The power sections are monitored by an electrically
isolated PTC thermistor detector. First an alarm will
be outputted, and - if the temperature continues to
rise - an error message. This will switch off the unit
in a controlled manner.
M
~
M55 M5 6
M
~
M57 M5 8
M
M
~
~
Configuration 2
HLWKHU9DF
RU9DF
L
N
12 345X99:
LN
M
~
M55
II K 3-6
Configuration 3
Page 17
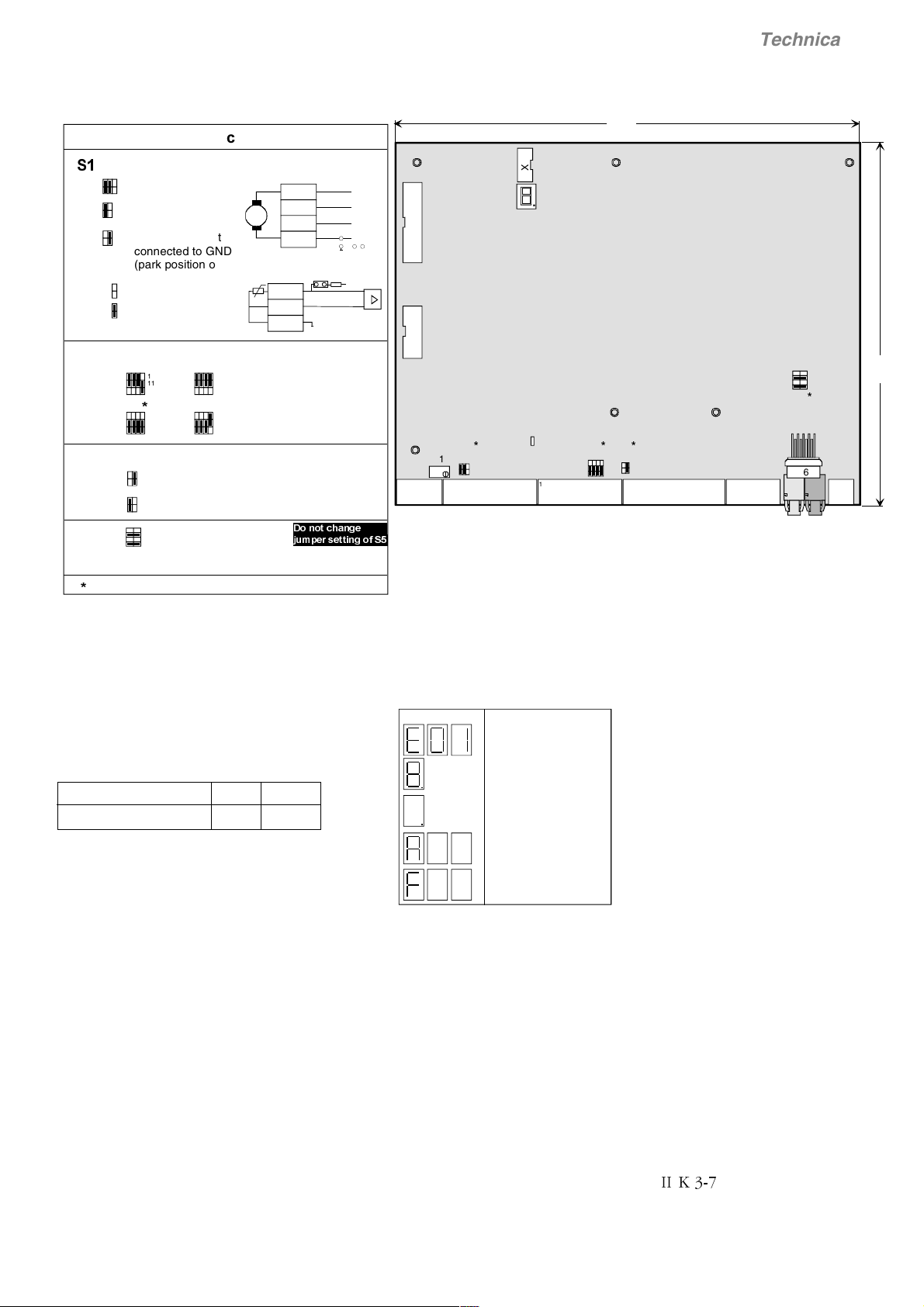
3.5 Control Board SDCS-CON-3A
Technical data
-XPSHUFRGLQJ
Tacho and PTC
6
6
2
*
15
2
Tacho signal
1
connected to GND
2
Tacho signal not
1
connected to GND
-
T
+
(park position only)
6
5
6
5
Pulse encoder
6
single ended:
differential:
Firmware download
6
6
default value
AI2 as ref input
AI2 used for temp.
measurement via PTC
5 V 24 V
31112
2
1
5 V
31112
2
1
4
2
3
1
42
13
78
12
31112
2
10
10
Normal operation
Firmware download via RS232
Note: change Jumper position only if electronics is switched off
For firmware download via RS232
S5:1-2 and 5-6 have to be jumpered
S5:5-6 int.Micro-controller Flash Prom
S5:1-2 Boot Mode
1
24 V
31112
2
1
10
10
X2:3
Fig. 3.5/1 Layout of the control board SDCS-CON-3A
-
X1:1
-
2
-
3
4
4
5
'RQRWFKDQJH
MXPSHUVHWWLQJRI6
-
+
GND
S1:
56PTC
S1
2
+
1
34
GND
22 K
+10V
233.5
X7
X12X13
78
12
All supports are conductive
connected to GND
S1
R115
6
2
1
5
41 91 81 101 5 1
X1 X2 X3 X4 X5 X8
Meas. point
I
A act
3
2
1
S2
S4
12
2
4
11
3
1
10
S5
X6
V800
DDCS
190
RS232
2
Control functions (Watchdog)
The control board has an internal watchdog. The
watchdog trip has the following effects:
- Thyristor firing control is reset and disabled.
- Digital outputs are forced to '0 V'.
Supply voltage monitoring
Supply voltage +5 V Mains
Undervoltage tripping level +4.50 V £97 VAC
If +5 V drops under the tripping level, it causes a
master reset by hardware. All I/O registers are forced
to 0 and the firing pulses are suppressed.
If mains monitor trips, firing pulses are forced to
inverter stability limit.
Serial interfaces
The control board SDCS-CON-3A has three serial
communication channels:
• X7: is a serial communication channel which is
used for
- DCS 400 PAN
- Adapter (3AFE 10035368)
• X6: is a standard RS232 serial communication
channel. It is a 9-pin D-Sub female connector
• V800 is an integrated channel and can be used
for Fieldbus Adapter by using optical fibre
Seven segment display
A seven segment display is located on the control
board and it shows the state of drive.
0.7s 0.7s 0.7s
RAM/ROM memory test error
Program is not running
Normal situation
Alarm
Fault
Fig. 3.5/2 Seven segment display of the SDCS-CON-3A
II K 3-7
Page 18

Digital and analogue I/O connection of the SDCS-CON-3A
Technical data
6'&6&21
-
X1:1
X2:1
90-270 V
30-90 V
2
-
3
4
2
3
4
8-30 V
+
-
+
S1:
22 K
56
-
+
5
6
7
8
9
X3:1
120
Ω
2
3
120
Ω
4
5
120
Ω
6
7
8
X4:1
2
+5V +24V
4.75k
10k
3
4
5
6
7
8
9
10
1
X5:
2
3
4
5
123
45
78
10 11 12
470k
A
+10V
S2
22n
R115
3
4
6
9
2
1
GND
+5/+24V
+5/+24V
+5/+24V
100k
S1
100k 100k
+10V
-10V
100µ
100n
ChA +
ChA -
ChB +
ChB ChZ +
ChZ -
GND
Power-Source
100k
1n
1n
0V
47.5
+24 V/ ≤50 mA
100
µ
47n
0 V
Software
AITAC
AI1
AI2
AO1
AO2
DI1
DI2
DI3
DI4
DI5
DI6
DI7
DI8
+24V
DO1
DO2
DO3
DO4
Reso- Input/output Scaling Load Common Remarks
lution values by mode
[bit] Hardware range
±90...270 V
11 + sign ±30...90 V R 115/ ±20 V ➀ ➁
±8...30 V Software
11 + sign -11...0...+11 V Software ±20 V ➀ ➁
11 + sign -11...0...+11 V Software ±40 V ➀ ➁
£10* mA for external use
£10* mA e.g. reference pot.
11 + sign -11...0...+11 V Software £5 * mA
11 + sign -11...0...+11 V Software £5 * mA
Encoder supply Remarks
Inputs not isolated
max. frequency £300 kHz
5V/ 24V £ 200 mA* Selectable with jumper S2: 10-12
Input value Signal definition Remarks
by
0...+5 V Software
+15...+30 V
^
= "0" status
^
= "1" status
Output value Signal definition Remarks
by
50 * mA Software Current limit for all 4 outputs =
160 mA
The terminal connectors X1: ... X5: are removable. They cannot be
interchanged
Fig. 3.5/3 Terminal connection of the SDCS-CON-3A board
II K 3-8
➀ total smoothing time £2 ms
➁ -20...0...+20 mA by external 500 W resistor
* short circuit proof
Note
Unless otherwise stated, all signals are
referenced to a 0 V potential. On all PCBs,
this potential is firmly connected to the
unit's casing by means of plating-through
at the fixing points.
Page 19
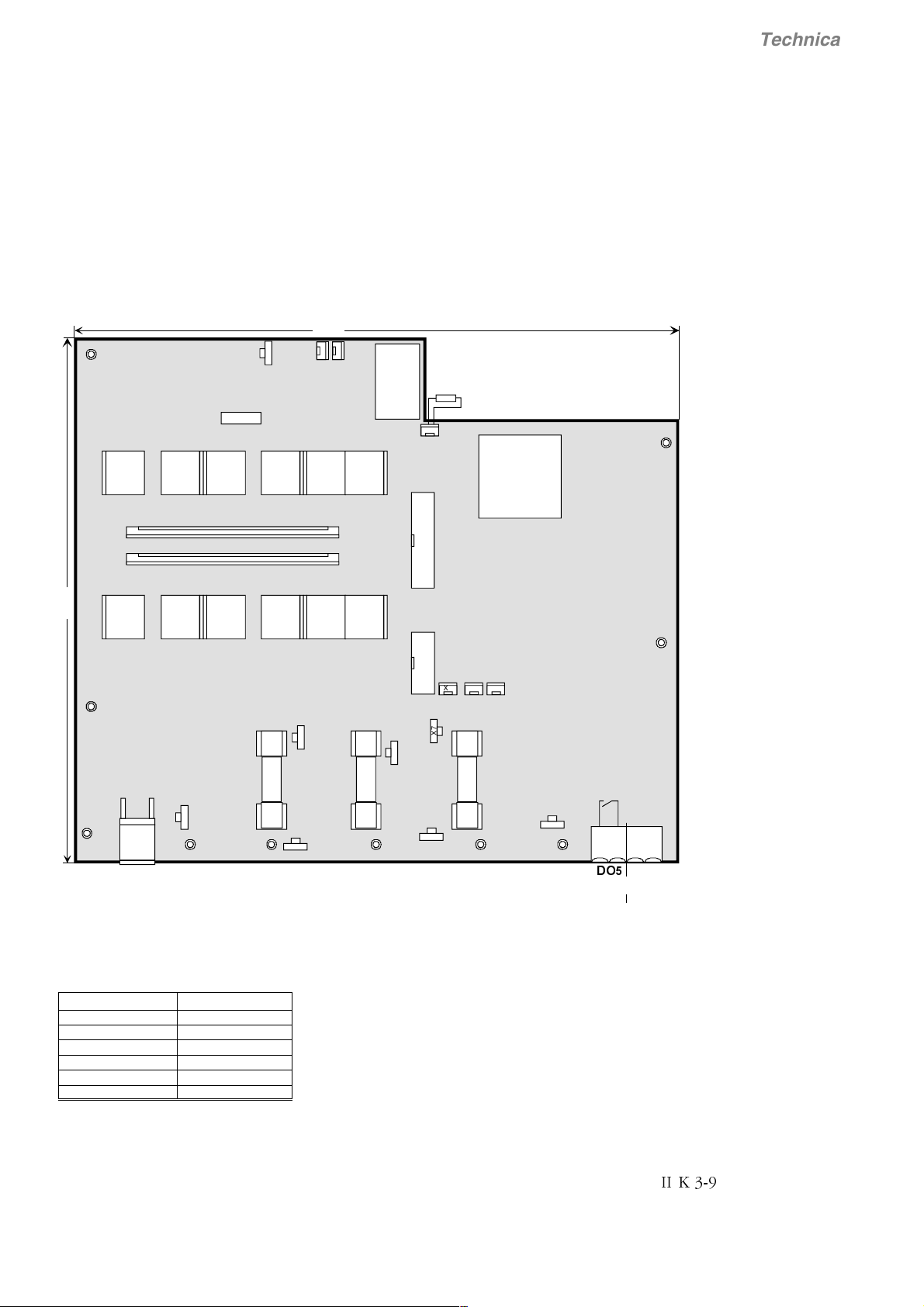
3.6 Power Interface Board SDCS-PIN-3A
The power interface board SDCS-PIN-3A is used
for all converter modules model A1...A4.
Functions:
- firing pulse circuits
- measurement of the armature current
- snubber circuit
- AC and DC voltage measurement
- heat sink temperature measurement
X6
258
X14
X11
- power supply for complete converter electronics
- fuses for field supply. Fuse data F100...F102:
T2
Technical data
Bussmann KTK-15A (600V)
PTC
X100
T24 T22 T26 T11 T15 T13
X15
X16
225
T14 T12 T16 T21 T25 T23
X1
F100
X24
X10
12
F+
to motor field
Fig. 3.6/1 Layout of the SDCS-PIN-3A board.
C1 U1 V1 W1 D1
X21
F-
X22
T1
X12X13
X3 X4 X5
X7
X2
F101
X23
F102
X20
X98
1234
Electronic
'2
supply
115...230 V
AC Supply voltage (X98:3-4)
Supply voltage 115...230 V AC
Tolerence -15%/+10%
Frequency 45 Hz ... 65 Hz
Power consumption 120 VA
Power loss £60 W
Inrush current 20 A/10 A (20 ms)
Mains buffering min 30 ms
Output X98:1-2 (DO5)
Potential isolated by relay (N.O. contact)
MOV- element (275 V)
Contact rating: AC: £250 V~/ £3 A~
DC: £24 V-/ £3 A-
or £115/230 V-/ £0.3 A-)
II K 3-9
Page 20
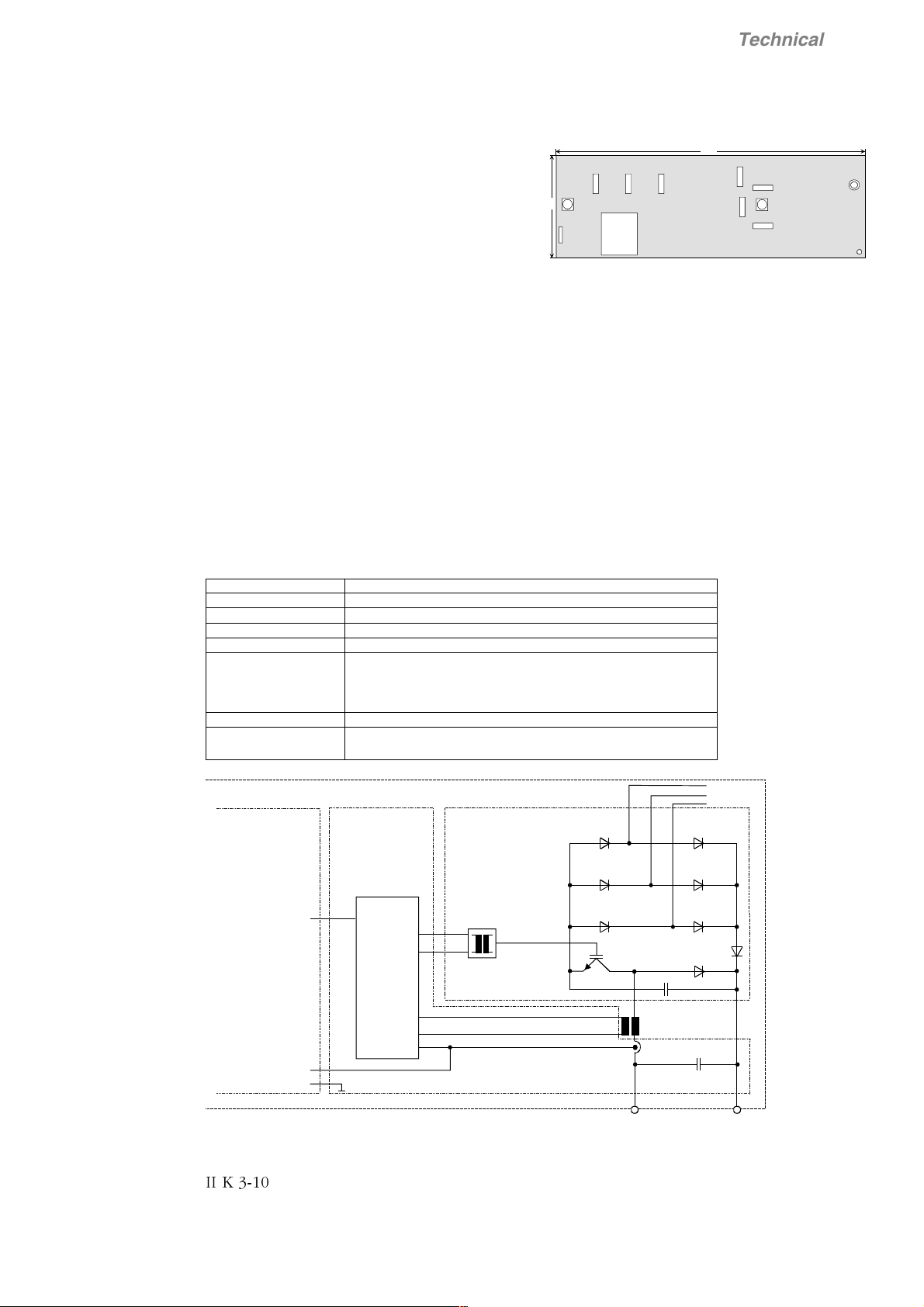
3.7 Field exciter SDCS-FIS-3A
Technical data
The DCS 400 converter has an build-in three-phase
field exciter with the following features:
X7
X2
X1
• smoothed field voltage
- better commutation of the motor
- increased brush life
45
T100
X14
• less heat generation in the motor
• less effort of cabling
Remark:
Fig. 3.7/1 Layout of the SDCS-FIS-3A field exciter
board
The DC link capacitor of the IGBT based field exciter
serves as an overvoltage protection for the armature
converter.
Overloading of the DC link capacitor is prevented by
the connected motor field winding.
The energy of glitches caused by the commutation of
the armature converter is no longer waste energy but
is used by the field exciter.
The overvoltage protection only works if a field winding is connected.
Therefore DCS400 can not be used with disconnected field.
Electrical data of SDCS-FIS-3A
AC input voltage: 230 V...500 V ±10%; three-phase
DC output voltage 50...440 V programmable
AC input current: £ output current
AC isolation voltage: 600 V
Frequency: same as DCS converter module
DC output current: 0.1 A...4 A for armature converter modules from 20 A to 25 A
Power loss see chapter 3.3
Terminal X10:1,2 on SDCS-PIN-3A
Cross sectional area 4 mm²
0.1 A...6 A for armature converter mod. from 45 A to 140 A
0.3 A...16 A for armature converter mod. from 180 A to 550 A
0.3 A...20 A for armature converter mod. for ³ 610 A
145
SDCS-FIS-3A
X6
X5
X4
X3
SDCS-CON-3A
FPWM
SDCS-PIN-3A SDCS-FIS-3A
X12: X12:
26
26
low level
control
3
1
X14:
Converter
8
IFM
989
GND
Fig. 3.7/2 Diagram of the field exciter unit
II K 3-10
U1
V1
X2 X7
X1
3
1
X14:
X11:2
3
X100:1-2 X6:1-3
X10:2 X10:1
(for motor field)
W1
X6X4X3
DC Output
Page 21
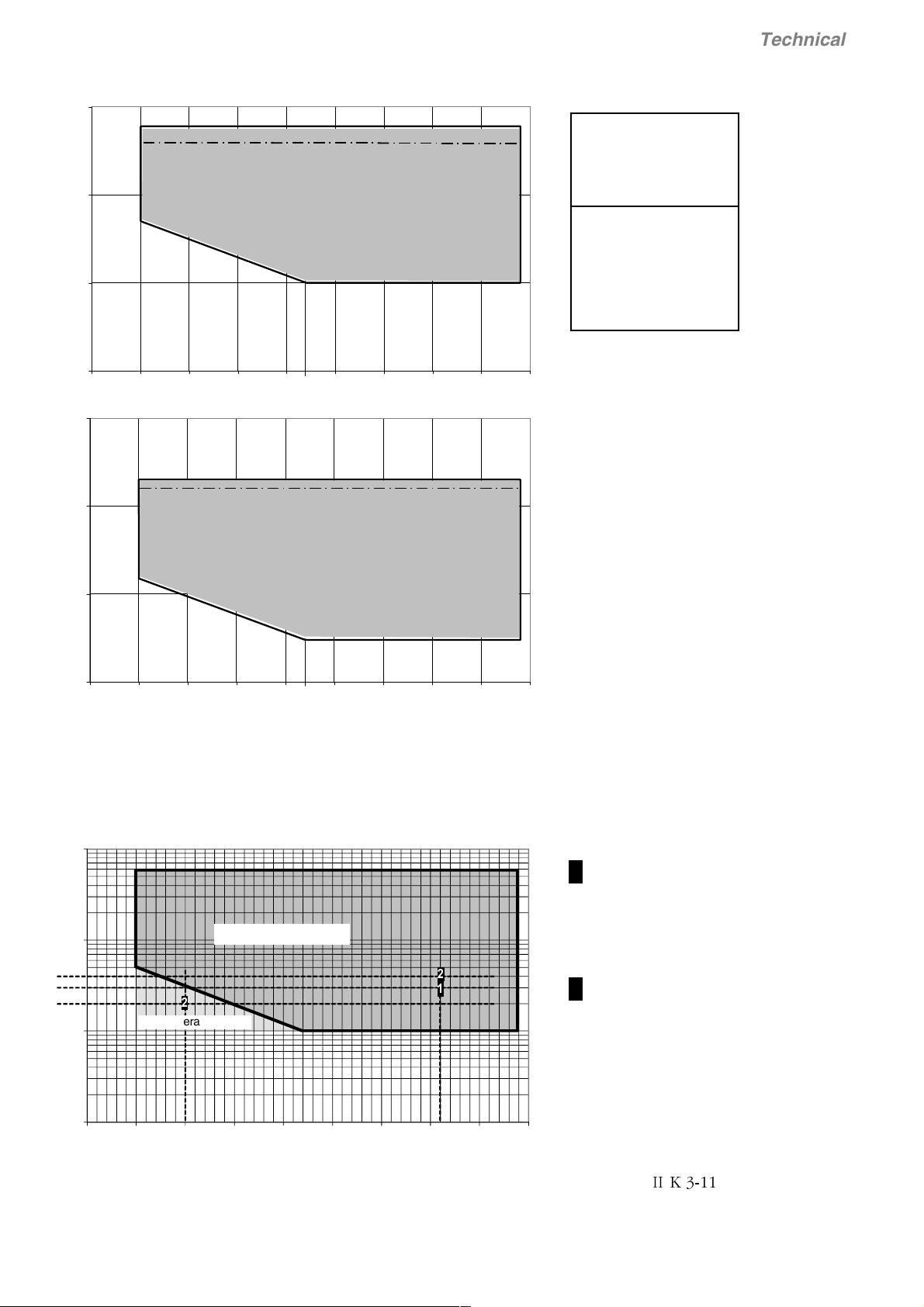
Technical data
I
[A]
0,1
0,01
10
F
1
6
4
0.5
0 50 100 150 200 250 300 350 400 450
DCS 40x.0020...DCS 40x.0140
0.1
220
Fig. 3.7/3 Operating area of field exciter 0.1...6 A
100
I
F
[A]
20
10
16
DCS 40x.0180...DCS 40x.1000
System con- Field
nection voltage
range
U
Line
[V~] [V-]
230 50...237
380 50...392
400 50...413
415 50...428
440 50...440
460 50...440
480 50...440
500 50...440
Table 3.7/1:
Field voltage range related to
U
[V]
F
specified input voltage
1
0,1
1.5
0.3
0 50 100 150 200 250 300 350 400 450
220
Fig. 3.7/4 Operating area of field exciter 0.3...20 A
Important note:
Nominal field voltage and field current of the motor has to be within the field
controller operating range. For application with constant field it is easy to
check:
Transfer values of field current and field voltage to the diagram and check
that the point of intersection is within the operating range.
10
I
F
[A]
2SHUDWLQJUDQJH
0,1
1
out of operating range
U
[V]
F
Example:
For field weakening application do that check with
nominal values and minimal values. Both points of
intersection have to be within the operating range.
Depend on the converter use the right diagram
1
(6 A or 20 A)
e.g. DCS401.0045
Ue 310 V / Ie 0.3 A
è 6A diagram è ok
Depend on the converter use the right diagram
2
(6 A or 20 A)
e.g. DCS402.0050
Ue
310 V / Ie
nom
è 6A diagram è ok
nom
0.4 A
0,01
0 50 100 150 200 250 300 350 400 450
Fig. 3.7/5 Example of Field exciter operating range
Ue
100 V / Ie
min
è 6A diagram è not ok, not to realize !
U
[V]
F
0.2 A
min
II K 3-11
Page 22
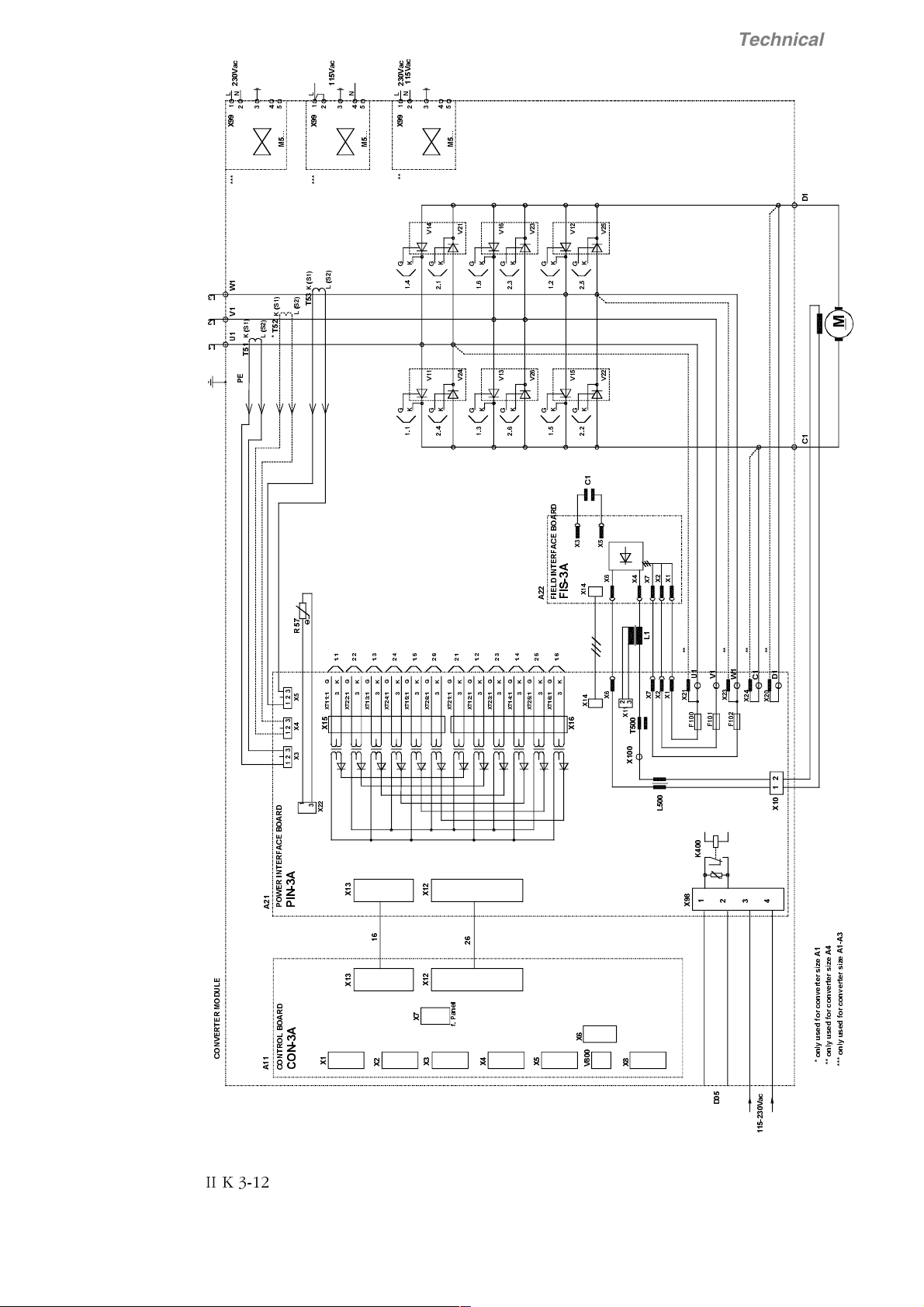
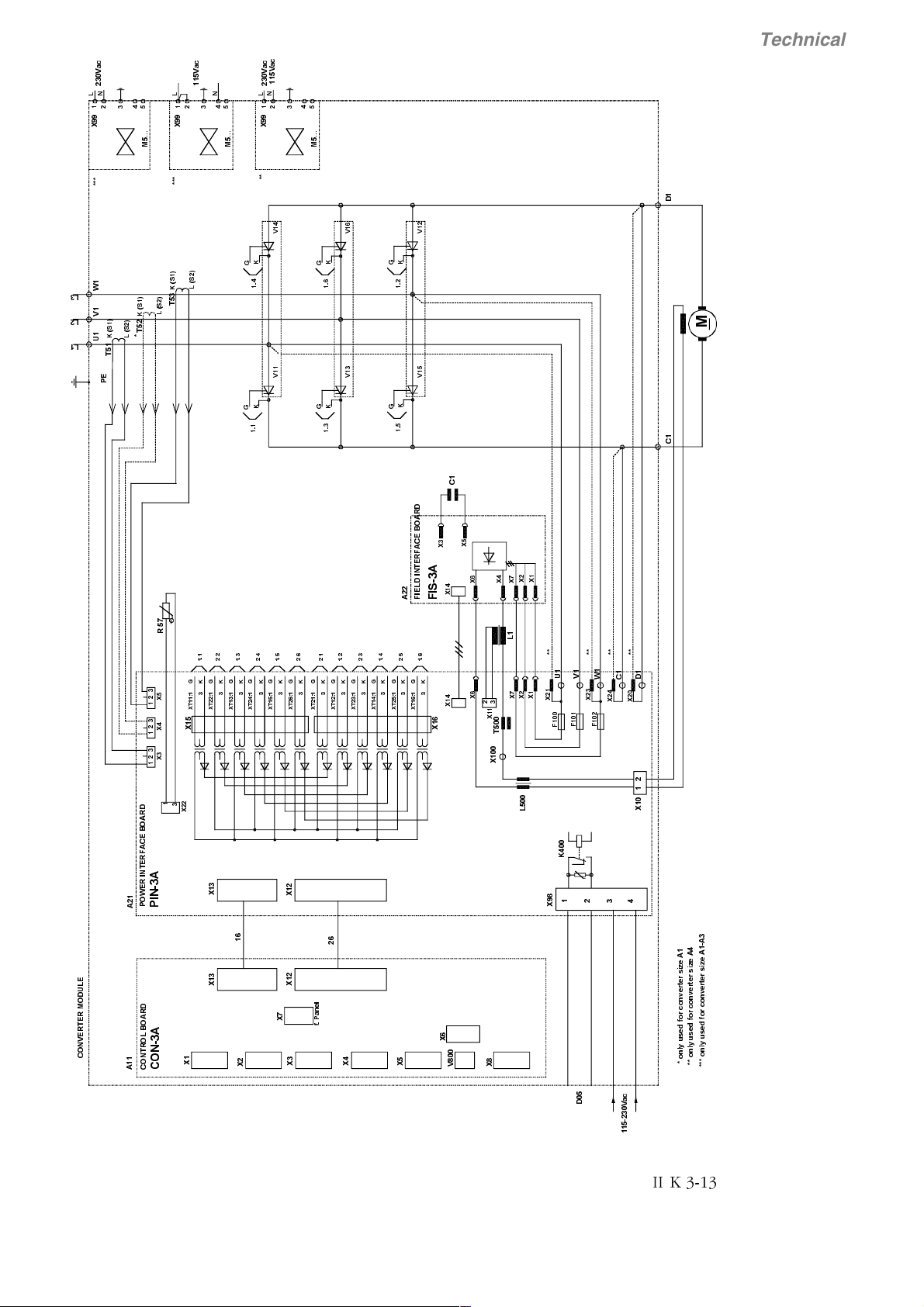
3.8 Ciruit diagrams
F
D
9
/
1
;
Technical data
F
D
9
/
1
;
0
F
F
D
D
9
9
/
1
;
0
0
:
/
9
/
6
6
/
.
8
/
7
(
3
$
6
6
/
.
7
6
6
/
.
7
2
5
'
5
$
2
%
(
&
$
)
5
(
7
1
,
5
(
:
2
3
;
;
;
$
1
,
3
7
7
;
;
;
;
;
'
9
9
.
.
*
**
9
9
.
..
*
*
9
9
.
*
0
9
.
.
*
7
;
.*.*.*
7
;
*.*.
7
7
7
;
;
;
;
9
**
.*.*
7
;
9
9
.
..
*
*
'
5
$
2
%
(
&
$
)
5
(
7
1
,
'
/
(
,
$
)
*
.*.**.
7
;
7
7
7
;
;
;
9
9
.
*
&
;
;
$
;
6
,
;
)
.*.
;
;
;
;;
;
;
/
;;
;
;
7
;
;
)
/
;
.
98
&
:
;
;
)
)
&
'
;
;
(
/
8
'
2
0
5
(
7
5
(
9
1
2
&
'
5
$
2
%
$
/
2
5
1
7
1
2
2
&
$
&
;
;
;
;
;
;
Fig. 3.8/1 Circuit diagram 4-Q converter
II K 3-12
O
H
Q
D
3
I
;
;
;
9
;
F
D
'
9
$
$
$
$
H
H
H
]
]
L
]
L
L
V
V
V
U
U
U
H
H
W
H
W
W
U
U
U
H
H
H
Y
Y
Y
Q
Q
Q
R
R
R
F
F
F
U
U
U
R
R
I
R
I
I
G
G
G
H
H
H
V
V
V
X
X
X
\
\
O
\
O
O
Q
Q
Q
R
R
R
Page 23
F
D
9
/
1
;
Technical data
F
D
9
/
1
0
;
F
F
D
D
9
9
/
1
0
;
0
:
/
9
/
6
6
/
.
8
/
7
(
3
6
6
/
.
7
6
6
/
.
7
2
5
;
;
;
'
5
$
2
%
(
&
$
)
5
(
7
1
,
$
5
(
:
1
,
2
3
3
$
7
7
;
;
;
;
;
'
9
.
*
9
.
*
9
.
*
0
9
.
*
7
;
.*.*.*
7
;
*.*.
7
7
;
;
;
9
.
*
.*.*
7
7
7
;
;
;
9
.
*
&
'
5
$
2
%
(
&
$
)
5
(
7
1
,
'
/
(
,
)
$
*
.*.**.
7
7
7
;
;
;
;
;
$
;
6
,
;
)
.*.
;
;
;
;;
;
;
/
8
9
&
;;
;
;
7
;
;
/
;
:
;
;
)
)
)
.
&
'
;
;
(
/
8
'
2
0
5
(
7
5
(
9
1
2
&
'
5
$
2
%
$
/
2
5
1
7
1
2
2
&
&
$
;
;
;
;
;
;
Fig. 3.8/2 Circuit diagram 2-Q converter
O
H
Q
D
3
I
;
;
;
9
;
F
D
'
9
$
$
$
$
H
H
H
]
]
L
]
L
L
V
V
V
U
U
U
H
H
W
H
W
W
U
U
U
H
H
H
Y
Y
Y
Q
Q
Q
R
R
R
F
F
F
U
U
U
R
R
I
R
I
I
G
G
G
H
H
H
V
V
V
X
X
X
\
\
O
\
O
O
Q
Q
Q
R
R
R
II K 3-13
Page 24

Technical data
II K 3-14
Page 25

4 Overview of software
(The software delivered may contain minor changes to the product described here.)
Overview of Software
Parameter
The parameters of the converter are subdivided into
functional groups. These groups are listed in the table
below.
Parameter group Functions
1 - Motor Settings Motor settings, actual line
values, auto reclosing
2 - Operating Mode Macro selection, behaviour
during switching on/off, control/status information, control location
3 - Armature Actual value signals, high
current dosage, controller
settings, stall protection, reference sources
4 - Field Actual value signals, con-
troller settings, overcurrent/
undercurrent tripping, flux
adaptation, field heating
5 - Speed Controller Reference sources, actual
value acquisition, controller
settings, ramp generator,
constant speeds, alternative
settings, speed monitoring,
actual value filtering
6 - Input/Output Scaling and allocation of the
analog and digital inputs and
outputs, display selection for
the control panel, field bus
allocation, actual value signals
7 - Maintenance Language selection, service
procedures, diagnostics,
fault and alarm information,
square-wave generator
8 - Field Bus Serial communication via the
field bus, RS232 or panel
adapter
9 - Macro Adaptation Re-configure digital inputs
DI1...DI4 of macros 1, 5, 6,
7, and 8.
Parameter saving
Any changes of the parameters are stored automatically in the FlashProm of the converter. The
storage is executed in a time interval of approx. 5
seconds.
Function menu
Special functions of the control panel are listed in the
table below.
Menu function Significance
Set Typecode Typecode adaptation for re-
placement of SDCS-CON-3
Read Faultlogger Read / Clear the last 16
Faults or Alarms
Factory Settings Reset all parameters to fac-
tory values (default values)
Copy to Panel Parameter uploading from
drive to control panel
Copy to Drive Parameter downloading
from control panel to drive
Long/Short Par List Some parameter visible / in-
visible
Panel Lock Lock the control panel for
maloperation
LCD Contrast Contrast of cotrol panel dis-
play
Commissioning Guided commissioning via
control panel
Continual parameter writing destroys the FlashProm
Parameter are saved automatically in a background
routine. This is done approx. every 5 seconds, when:
• parameters are altered by means of the control
panel.
• parameters are transmitted by means of PC Tool
Drive Window Light, irrespective of whether the
content of the parameter has changed.
• parameters are transmitted by means of PLC
communication via one of the three serial ports
Field bus adapter or RS232-Port or PanelPort, irrespective of whether the parameter’s
content has changed.
Continual transmission of a parameter with the
same content will entail continual saving in the
background routine, i.e. even if the value of the
parameter does not change, the save routine will still
be activated.
A FlashProm of the present-day generation can be
written on and erased up to 100,000 times. This
means 100,000 x 5 seconds = approx. 6 days.
Continual transmission of parameters may destroy this FlashProm after approx. 6 days, which
is why parameters should only be transmitted if
the values involved have changed.
II K 4-1
Page 26
4.1 General information about application Macros
Overview of Software
Macros are pre-programmed parameter sets. During start-up, the
drive can be configured easily without changing individual parameters.
The functions of all inputs and outputs and of allocations in the
control structure are influenced by the selection of a macro. Any
allocation which can be set manually with a “selector” (parameter) is
preset by the selection of a macro. The means, whether the drive is
speed-controlled or torque-controlled, whether supplementary references are processed, which actual values are available at the
Selector Remark
Cmd Location (2.02) Control location
Cur Contr Mode (3.14) Current controller operating mode
Torque Ref Sel (3.15) Torque reference source
Speed Ref Sel (5.01) Speed reference source
Alt Par Sel (5.21) Switching event for alternative speed
control parameters
Aux Sp Ref Sel (5.26) Auxiliary reference source
AO1 Assign (6.05) Actual value output at analog output AO1
AO2 Assign (6.08) Actual value output at analog output AO2
DO1 Assign (6.11) Signal output at digital output DO1
DO2 Assign (6.12) Signal output at digital output DO2
DO3 Assign (6.13) Signal output at digital output DO3
DO4 Assign (6.14) Signal output at digital output DO4
DO5 Assign (6.15) Signal output at digital output DO5
MSW bit 11 Ass (6.22) Signal transmission in bit 11 of the status
word
MSW bit 12 Ass (6.23) Signal transmission in bit 12 of the status
word
MSW bit 13 Ass (6.24) Signal transmission in bit 13 of the status
word
MSW bit 14 Ass (6.25) Signal transmission in bit 14 of the status
word
Jog 1 (9.02) Jogging 1 function via Fixed Speed 1
(5.13)
Jog 2 (9.03) Jogging 2 function via Fixed Speed 2
(5.14)
COAST (9.04) Coast stop function
User Fault (9.05) external User Fault event
User Fault Inv (9.06) external User Fault (invers) event
User Alarm (9.07) external User Alarm event
User Alarm Inv (9.08) external User Alarm (inverse) event
Dir of Rotation (9.09) Direction of Rotation only for speed con-
trolled drive
Mot Pot Incr (9.10) Motor Potentiometer Increment to in-
crease speed ref.
Mot Pot Decr (9.11) Motor Potentiometer Decrement to de-
crease speed ref.
analog outputs, which reference value sources are used, etc. is
already defined in the macro.
A macro is selected in the Macro Select (2.01) parameter. After
selection a function is assigned to each of the digital inputs DI1…DI8.
The functions are described in the chapter Application Macros.
The following “selectors” (parameters) are predefined when you are
selecting the macro provided that these parameters have their
default settings or are set to Macro Depend:
Selector Remark
MotPotMinSpeed (9.12) Motor Potentiometer Minimum Speed ref.
Ext Field Rev (9.13) external Field Reversal via external field
reversing switch
AlternativParam (9.14) switch over between Standard Parame-
ter Set and Alternative Parameter Set
Ext Speed Lim (9.15) external Speed Limitation via Fixed Speed
1 (5.13)
Add AuxSpRef (9.16) additional aux. speed ref.
Curr Lim 2 Inv (9.17) second current limitation via Arm Cur Lim
2 (3.24)
Speed/Torque (9.18) switch over between speed controlled
and torque controlled drive
Disable Bridge1 (9.19) block thyristor bridge 1
Disable Bridge2 (9.20) block thyristor bridge 2
Then the allocations will be dependent on the selected macro, see
chapter
The user can
are no longer “
allows the flexible, user-friendly adaptation to special requirements.
In addition to analog and digital outputs some of the digital inputs are
re-configurable. The digital inputs DI1…DI4 in macros 1+5+6+7+8
can be set individually via parameter group 9 - MacroAdaptation.
Macros 2+3+4 are fixed, not re-configurable.
Example of MacroAdaptation:
• Set parameter „Dir of Rotation" (9.09) from Macro depend to
• Set parameter „AlternativParam" (9.14) from Macro depend to
• Set standard parameter set (5.07…5.10) and alternative
Application Macros
change
Macro Depend
macro 6 - MotorPot should be selected
digital input DI1 should be re-defined from "direction of rotation"
to "alternativ parameter set" for using ramp 1 / 2
Disable
DI1
parameter set (5.22…5.25) to values as required
.
the allocations manually any time. Then they
”. Hence the macro technique also
II K 4-2
Page 27
Overview of Software
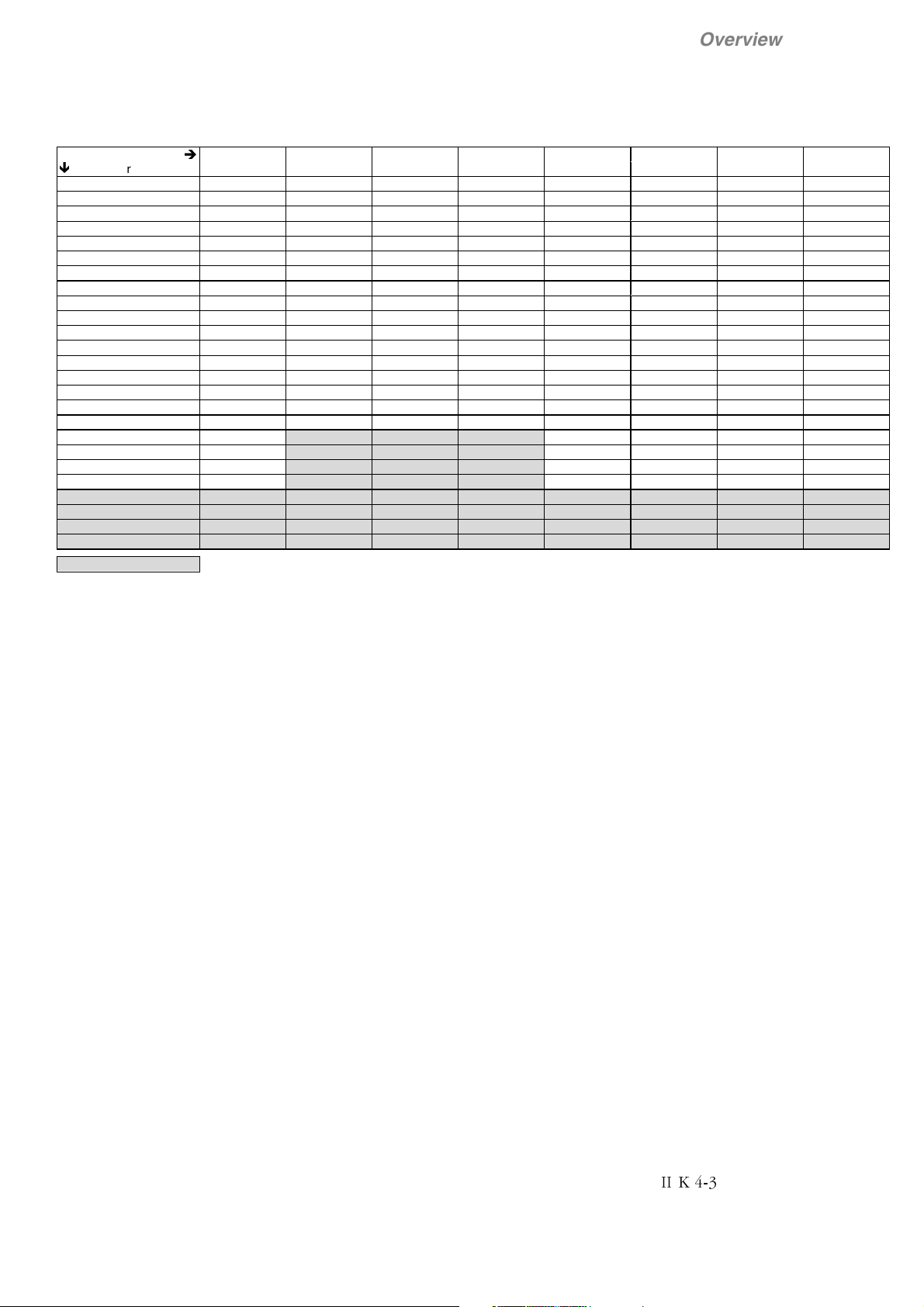
Overview of factory settings of macro-dependent parameters:
Macro
Ï
Parameter Standard Man/Const Sp Hand/Auto Hand/MotPot Jogging Motor Pot ext Field Rev Torque Ctrl
Cmd Location (2.02) Terminals Terminals Terminals Terminals Terminals Terminals Terminals Terminals
Cur Contr Mode (3.14) Speed Contr Speed Contr Speed Contr Speed Contr Speed Contr Speed Contr Speed Contr Torque Contr
Torque Ref Sel (3.15) AI2 AI2 Const Zero AI2 Const Zero AI2 AI2 AI1
Speed Ref Sel (5.01) AI1 AI1 AI1 AI1 AI1 Const Zero AI1 Const Zero
Alt Par Sel (5.21) Sp < Lev1 Digital Input 4 Sp < Lev1 Sp < Lev1 Sp < Lev1 Sp < Lev1 Sp < Lev1 Sp < Lev1
Aux Sp Ref Sel (5.26) Const Zero Const Zero Const Zero Const Zero AI2 Const Zero Const Zero Const Zero
AO1 Assign (6.05) Speed Act Speed Act Speed Act Speed Act Speed Act Speed Act Speed Act Speed Act
AO2 Assign (6.08) Arm Volt Act Arm Cur Act Arm Cur Act Arm Cur Act Torque Act Arm Volt Act Arm Volt Act Torque Act
DO1 Assign (6.11) Rdy for Run Rdy for On Rdy for On Rdy for On Rdy for Run Rdy for Run Rdy for Run Rdy for Run
DO2 Assign (6.12) Running Running Running Running Zero Speed Speed Level 1 Running Running
DO3 Assign (6.13) Zero Speed Fault Fault Fault At Setpoint Speed Level 2 Field Rev Act Zero Speed
DO4 Assign (6.14) Flt or Alarm Zero Speed Zero Speed Zero Speed Flt or Alarm Flt or Alarm Flt or Alarm Flt or Alarm
DO5 Assign (6.15) Main Cont On Main Cont On Main Cont On Main Cont On Main Cont On Main Cont On Main Cont On Main Cont On
MSW Bit11 Ass (6.22) none none none none none none none none
MSW Bit12 Ass (6.23) none none none none none none none none
MSW Bit13 Ass (6.24) none none none none none none none none
MSW Bit14 Ass (6.25) none none none none none none none none
Assignment of DI1 Jog 1 Start
Not re-configurable
Í
DI2 Jog 2 Stop Hand/Auto Jog 1 Jog 1 Incr. Speed Jog 1 not used
DI3 External Fault Direc of Rotat. Direc of Rotat. Direc of Rotat. Jog 2 Decr. Speed External Fault External Fault
DI4 External Alarm Ramp 1 / 2 AI1/Fixed Sp 1 AI1/MotPot not used Min Speed External Alrm External Alrm
DI5 Emerg. Stop Emerg. Stop Emerg. Stop Emerg. Stop Emerg. Stop Emerg. Stop Emerg. Stop Emerg. Stop
DI6 Reset Reset Reset Reset Reset Reset Reset Reset
DI7 On/Off Fixed Speed 1 Direc of Rotat. Incr. Speed On/Off On/Off On/Off On/Off
DI8 Run Fixed Speed 2
12345678
Start/Stop Hand
Start/Stop Auto
Start/Stop Direc of Rotat. Direc of Rotat. Ext Field Rev Coast
Decr. Speed Run Run Run Run
II K 4-3
Page 28

4.2 Application Macros
The following application macros are available:
Overview of Software
Macro 1: Standard
Drive switch-on/switch-off and enable via 2
digital inputs.
Speed reference via analog input.
External torque limiting via analog input.
Jogging via 2 digital inputs.
2 digital inputs for external events (fault/
alarm).
2 digital inputs for emergency stop and fault
acknowledgement.
Macro 2: Man/Const Sp
Starting and stopping of the drive via 2 digital
inputs.
Speed reference via analog input.
Reversal of rotational direction via 1 digital input.
2 ramp sets selectable via 1 digital input.
Selection of speed reference or 2 fixed
speeds via 2 digital inputs.
2 digital inputs for emergency stop and fault
acknowledgement.
Macro 3: Hand/Auto
Switchover between manual and auto. control
effected via 1 digital input.
Manual control:
Starting and stopping of the drive via 1 digital input.
Speed reference via analog input 1.
Selection of speed reference or 1 fixed
speed via 1 digital input.
Reversal of rotational direction via 1 digital input.
Automatic control:
Starting and stopping of the drive via 1 digital input.
Speed reference via analog input 2.
Reversal of rotational direction via 1 digi-
tal input.
2 digital inputs for emergency stop and fault
acknowledgement.
Macro 4: Hand/MotPot
Starting and stopping of the drive via 1 digital
input.
Jogging via 1 digital input.
Speed reference via analog input.
Reversal of rotational direction via 1 digital input.
Motor potentiometer function via 2 digital inputs.
Selection of speed reference or motor pot via
1 digital input.
2 digital inputs for emergency stop and fault
acknowledgement.
Macro 5: Jogging
Drive switch-on/switch-off and enable via 2 digital inputs.
Speed reference via analog input 1.
Additional reference via analog input 2.
Jogging via 2 digital inputs.
Reversal of rotational direction via 1 digital input.
2 digital inputs for emergency stop and fault
acknowledgement.
Macro 6: Motor Pot
Drive switch-on/switch-off and enable via 2 digital inputs.
Reversal of rotational direction via 1 digital input.
Minimum speed can be activated via 1 digital
input.
Motor pot function via 2 digital inputs.
2 digital inputs for emergency stop and fault
acknowledgement.
Macro 7: ext Field Rev
Drive switch-on/switch-off and enable via 2 digital inputs.
Speed reference via analog input 1.
External torque limiting via analog input 2.
Jogging via 1 digital input.
External field reversal can be activated via 1
digital input.
2 digital inputs for external events (fault/
alarm).
2 digital inputs for emergency stop and fault
acknowledgement.
Macro 8: Torque Ctrl
Drive switch-on/switch-off and enable via 2 digital inputs.
Torque reference via analog input.
Coast Stop via 1 digital input.
2 digital inputs for external events (fault/
alarm).
2 digital inputs for emergency stop and fault
acknowledgement.
II K 4-4
Page 29

Overview of Software
II K 4-5
Page 30
4.2.1 Macro 1 - Standard
Description of I/O’s functionality
I/O Param Function
DI1 Jog speed 1. Speed can be defined in parameter 5.13.
DI2 Jog speed 2. Speed can be defined in parameter 5.14.
DI3 2.01 External fault signal. Triggers a fault response and trips the drive
DI4 External alarm signal. Triggers a warning in DCS400
DI5 Emergency stop. Closed-circuit principle, must be closed for operation
DI6 Reset. Faultacknowledgement, reset faults signaled by the drive
DI7 Drive ON / OFF. DI7=0=OFF , DI7=1=ON
DI8 Drive START / STOP. DI8=0=STOP , DI8=1=START
DO1 6.11 Ready for Run. Converter switched ON, but not yet STARTed
DO2 6.12 Running. Drive is STARTed (Current controller enabled)
DO3 6.13 Zero-speed signal. Motor at standstill
DO4 6.14 Group fault signal. Common signal for all faults or alarms
DO5 6.15 Main contactor on. Controlled by ON command (DI7)
AI1 5.01 Speed reference
AI2 3.15 External torque limitation possible. First the parameter Cur Contr Mode 3.14 has to be changed
AO1 6.05 Speed actual
AO2 6.08 Armature voltage actual
Inter locking of Jog speed 1 – Jog speed 2 – Drive START
Jog 1
DI1
Overview of Software
Accel/Decel Ramp for Jogging can be defined in parameter 5.19/5.20.
Accel/Decel Ramp for Jogging can be defined in parameter 5.19/5.20.
from Macro depend to Lim Sp Ctr. Without changes the factory settings for torque limitation is
effective (100%).
Jog 2
DI2
0 0 0 Drive is STOPped (Current controller disabled)
1 0 0 Drive STARTed via DI1 , speed reference=parameter 5.13
x 1 0 Drive STARTed via DI2 , speed reference=parameter 5.14
x x 1 Drive STARTed via START command (DI8) , speed reference via analog input AI1
START
DI8
Drive is ON (DI7=1)
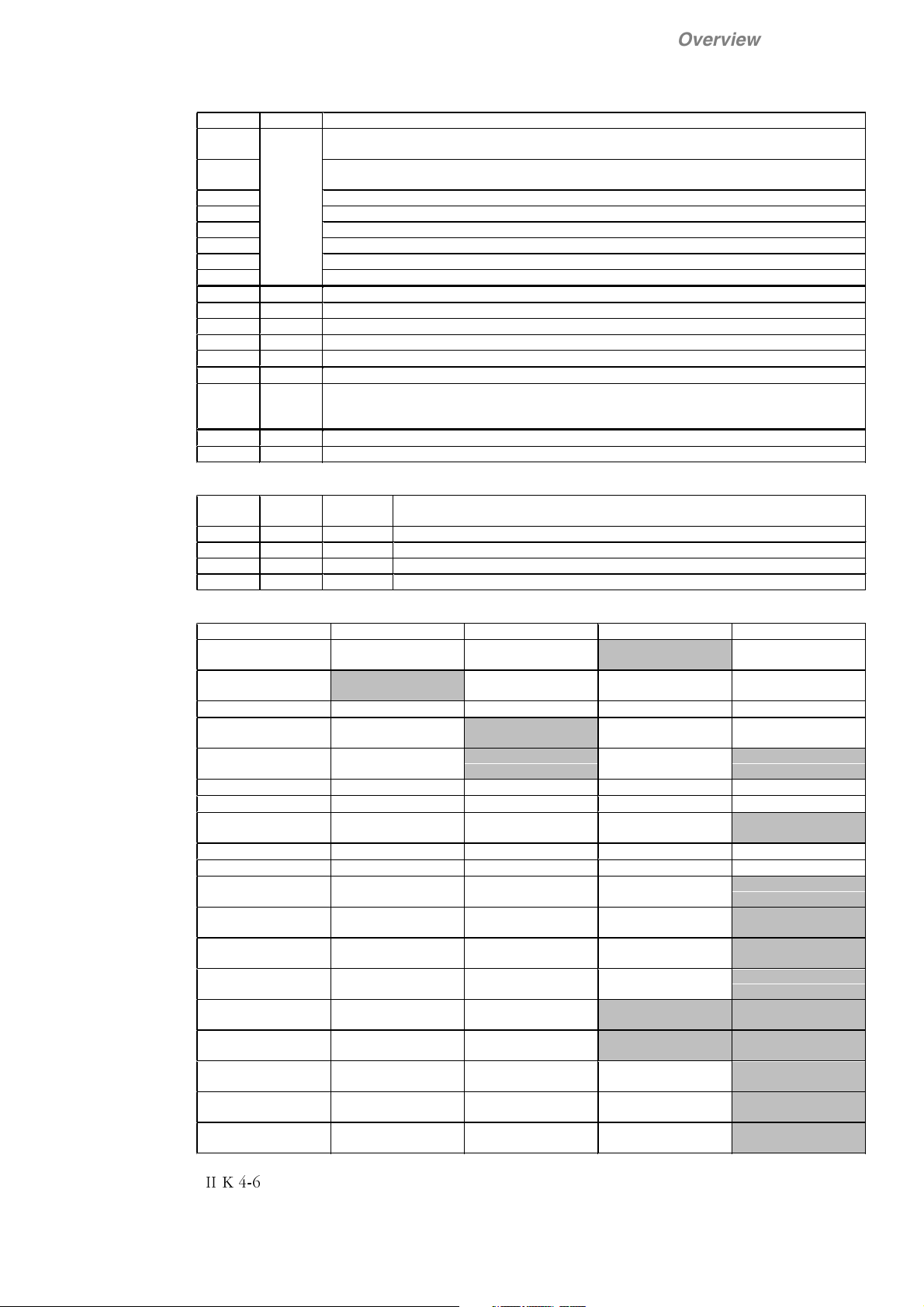
Parameter settings, shaded areas are set by macro - all others are set during commissioning
1 - Motor Settings 2 - Operation Mode 3 - Armature 5 - Speed Controller 6 - Input/Output
1.01 Arm Cur Nom 2.01 Macro Select
[Standard]
1.02 Arm Volt Nom 2.02 Cmd Location
[Terminals]
1.03 Field Cur Nom 2.03 Stop Mode 3.08 Torque Lim Neg 5.03 Encoder Inc 6.03 AI2 Scale 100%
1.04 Field Volt Nom 2.04 Eme Stop Mode 3.14 Cur Contr Mode
1.05 Base Speed 3.15 Torque Ref Sel
1.06 Max Speed 3.17 Stall Torque 5.11 Eme Stop Ramp 6.06 AO1 Mode
3.04 Arm Cur Max 5.01 Speed Ref Sel
[AI1]
3.07 Torque Lim Pos 5.02 Speed Meas
Mode
5.09 Accel Ramp 6.04 AI2 Scale 0%
[Speed Contr]
5.10 Decel Ramp
[AI2]
3.18 Stall Time 5.12 Ramp Shape 6.07 AO1 Scale 100%
5.13 Fixed Speed 1 6.08 AO2 Assign
5.14 Fixed Speed 2 6.09 AO2 Mode
5.15 Zero Speed Lev 6.10 AO2 Scale 100%
5.16 Speed Level 1 6.11 DO1 Assign
5.17 Speed Level 2 6.12 DO2 Assign
5.19 Jog Accel Ramp 6.13 DO3 Assign
5.20 Jog Decel Ramp 6.14 DO4 Assign
5.21 Alt Par Sel
[Sp < Lev1]
5.26 Aux Sp Ref Sel
[Const Zero]
6.01 AI1 Scale 100%
6.02 AI1 Scale 0%
6.05 AO1 Assign
[Speed Act]
[Arm Volt Act]
[Rdy for Run]
[Running]
[Zero Speed]
[Flt or Alarm]
6.15 DO5 Assign
[Main Cont On]
6.22 MSW Bit 11 Ass
[none]
6.23 MSW Bit 11 Ass
[none]
6.24 MSW Bit 11 Ass
[none]
6.25 MSW Bit 11 Ass
[none]
II K 4-6
Page 31

Overview of Software
_
1.03 / 1.04
unit
Field exciter
1.05 / 1.06
1.01 / 1.02
400V 50H z
F1
1
L1 N L1 L2 L3
115...230V 50 Hz
2
135
K1
246
U1 W 1V1 PE
L1
F5
module type and on the supply voltage
the connection of the fan depends on the
module
Converter
5.02
~
M
5.03
Fan
6.14
6.13
6.12
6.11
1
2
F4
4 A
Main contactor ON
98:2
1
98:1
2
F6
K1
12 34 45X99: 1 2 3
X98:
Power supply
6.15
DO5
2.01
0V
0V0V
+
X10: 1 2
_
C 1 D 1
+
U
S
0 V
Z-
Z+
B-
B+
A-
A+
1 2345678
X3:
Emergenc y stop
Fault or Alar m
Zero-speed
Running
Ready for Run
Run
On/Off
Reset
User alarm
User fault
Jogging 2
Jogging 1
**
mode!
regenerative
* only required in
Q
R
L
W
D
W
S
D
G
$
R
U
F
D
re-configu rable in
parameter group 9
0
M
for motor operation
the po larities are shown
+
T
_
T
(optical)
RXD
X2
PE SHF DG D(N) D(P)SH
8.01 ... 8.16
IN
DDCS
ON
OFF
BUS
TERMINA TION
Nxxx-01
xxxxxxxx
ADAPTER
TXD
XMIT
REC
ERROR
+24V 0V SH
PE SHF DG D(N) D(P)
X1
Control board
'&6
OUT
6.08 / 6.09 / 6.10
6.05 / 6.06 / 6.07
6.03 / 6.04
6.01 / 6.02
5.02
+24 V
X6:
X7:
X8:
RS232
&
3
AI2
0V
AITAC AI1
Parameter
+10V -10V AO1 AO2 DI1 DI2 DI3 DI4 DI5 DI6 DI7 DI8 +24V DO1DO2 DO3 DO4
++
__
2
1
X2:
S1
+
_
X1:1234 1234 567 8 9 X4:12345678910X5:12345
DCS 400 P AN
U
a act
n
act
T
ref
n
ref
Fig. 4.2/1: Connection example application-Macro 1 - Standard
II K 4-7
Page 32

4.2.2 Macro 2 - Man/Const Sp
Description of I/O’s functionality
I/O Param Function
DI1 Drive is started by closing digital input DI1 (DI=1). Switches the drive ON and START
DI2 Drive is stopped by opening digital input DI2 (DI2=0). DI2 has a higher priority than DI1, i.e. if DI2 is
DI3 2.01 Direction of rotation. DI3=0=forward, DI3=1=reverse
DI4 2 ramp sets selectable.
DI5 Emergency stop. Closed-circuit principle, must be closed for operation
DI6 Reset. Faultacknowledgement, reset faults signaled by the drive
DI7 Fixed speed 1, speed can be defined in parameter 5.13 (Ramp 5.19/5.20)
DI8 Fixed speed 2, speed can be defined in parameter 5.14 (Ramp 5.19/5.20)
DO1 6.11 Ready for On. Elektronics powered up, no fault signals present
DO2 6.12 Running. Current controller enabled
DO3 6.13 Fault signal. Converter tripped
DO4 6.14 Zero-speed signal. Motor at standstill
DO5 6.15 Main contactor on. Controlled by START command (DI1)
AI1 5.01 Speed reference
AO1 6.05 Speed actual
AO2 6.08 Armature current actual
Overview of Software
open the drive can not be started. Stop the drive in according to parameter Stop-Mode and
afterwards switch the drive off.
DI4=0=Ramp 1
Accel Ramp 5.09 / Decel Ramp 5.10 / Speed Reg KP 5.07 / Speed Reg TI 5.08
DI4=1=Ramp 2
Alt Accel Ramp 5.24 / Alt Decel Ramp 5.25 / Alt Speed KP 5.22 / Alt Speed TI 5.23
Selection of speed reference or 2 fixed speed via DI7 and DI8
DI7 DI8 Drive is STARTed (DI1=1)
00• Man Speed; Speed reference via analog input AI1
10• Const Speed; Fixed speed 1, speed can be defined in parameter 5.13 (Ramp 5.19/5.20)
x1• Const Speed; Fixed speed 2, speed can be defined in parameter 5.14 (Ramp 5.19/5.20)
Parameter settings, shaded areas are set by macro - all others are set during commissioning
1 - Motor Settings 2 - Operation Mode 3 - Armature 5 - Speed Controller 6 - Input/Output
1.01 Arm Cur Nom 2.01 Macro Select
[Man/Const Sp]
1.02 Arm Volt Nom 2.02 Cmd Location
[Terminals]
1.03 Field Cur Nom 2.03 Stop Mode 3.08 Torque Lim Neg 5.03 Encoder Inc 6.03 AI2 Scale 100%
1.04 Field Volt Nom 2.04 Eme Stop Mode 3.14 Cur Contr Mode
1.05 Base Speed 3.15 Torque Ref Sel
1.06 Max Speed 3.17 Stall Torque 5.11 Eme Stop Ramp 6.06 AO1 Mode
3.04 Arm Cur Max 5.01 Speed Ref Sel
[AI1]
3.07 Torque Lim Pos 5.02 Speed Meas
Mode
5.09 Accel Ramp 6.04 AI2 Scale 0%
[Speed Contr]
5.10 Decel Ramp
[AI2]
3.18 Stall Time 5.12 Ramp Shape 6.07 AO1 Scale 100%
5.13 Fixed Speed 1 6.08 AO2 Assign
5.14 Fixed Speed 2 6.09 AO2 Mode
5.15 Zero Speed Lev 6.10 AO2 Scale 100%
5.16 Speed Level 1 6.11 DO1 Assign
5.17 Speed Level 2 6.12 DO2 Assign
5.19 Jog Accel Ramp 6.13 DO3 Assign
5.20 Jog Decel Ramp 6.14 DO4 Assign
5.21 Alt Par Sel
[DI4]
5.24 Alt Accel Ramp 6.22 MSW Bit 11 Ass
5.25 Alt Decel Ramp 6.23 MSW Bit 12 Ass
5.26 Aux Sp Ref Sel
[Const Zero]
6.01 AI1 Scale 100%
6.02 AI1 Scale 0%
6.05 AO1 Assign
[Speed Act]
[Arm Cur Act]
[Rdy On]
[Running]
[Fault]
[Zero Speed]
6.15 DO5 Assign
[Main Cont On]
[none]
[none]
6.24 MSW Bit 13 Ass
[none]
6.25 MSW Bit 14 Ass
[none]
II K 4-8
Page 33

Overview of Software
_
1.03 / 1.04
unit
Field exciter
1.05 / 1.06
1.01 / 1.02
400V 50H z
F1
1
L1 N L1 L2 L3
115...230V 50 Hz
2
135
K1
246
U1 W 1V1 PE
L1
F5
module type and on the supply voltage
the connection of the fan depends on the
module
Converter
~
M
5.03
5.02
Fan
6.14
6.13
6.12
6.11
1
2
F4
4 A
Main contactor ON
98:2
1
98:1
2
F6
K1
12 34 45X99: 1 2 3
X98:
Power supply
6.15
DO5
2.01
C 1 D 1
0V
0V0V
+
X10: 1 2
_
+
U
S
0 V
Z-
Z+
B-
B+
A-
A+
1 2345678
X3:
Zero-speed
Running
Ready for ON
Fixed s peed 2
Fixed s peed 1
Emergenc y stop
Ramp 1 / Ramp 2
Direction of ro tation
**
Fault
Reset
Stop
Start
M
mode!
regenerative
* only required in
not re-confi gurable
for motor operation
the po larities are shown
+
T
_
T
RXD
X2
PE SHF DG D(N) D(P)SH
8.01 ... 8.16
DDCS
(optical)
ON
BUS
TERMINA TION
Nxxx-01
xxxxxxxx
ADAPTER
TXD
XMIT
REC
'&6
IN
OFF
ERROR
+24V 0V SH
PE SHF DG D(N) D(P)
X1
6.08 / 6.09 / 6.10
6.05 / 6.06 / 6.07
Control board
OUT
+24 V
X8:
&
3
6.03 / 6.04
6.01 / 6.02
X6:
RS232
I
a act
n
act
+10V -10V AO1 AO2 DI1 DI2 DI3 DI4 DI5 DI6 DI7 DI8 +24V DO1DO2 DO3 DO4
AI2
++
__
2
1
X2:
S1
0V
+
5.02
AITAC AI1
_
X7:
Parameter
X1:1234 1234 567 8 9 X4:12345678910X5:12345
n
ref
DCS 400 P AN
Fig. 4.2/2: Connection example application-Macro 2 - Man/Const Sp
II K 4-9
Page 34

4.2.3 Macro 3 - Hand/Auto
Description of I/O’s functionality
I/O Param Function
DI1 Start / Stop
Start switches the drive ON and START. Stop the drive in according to parameter Stop-Mode and
afterwards switch the drive off.
DI2 Switchover between manual and automatic control.
Present Start/Stop command will be of effect after switching:
DI2=0=
DI2=1=
DI3 2.01 Direction of rotation
DI4 Selection of speed reference AI1 / Fixed speed 1
DI4=0=speed reference via analog input AI1
DI4=1=fixed speed 1 , speed can be defined in parameter 5.13 (Ramp 5.19/5.20)
DI5 Emergency stop. Closed-circuit principle, must be closed for operation
DI6 Reset. Faultacknowledgement, reset faults signaled by the drive
DI7 Direction of rotation
DI8 Start / Stop
Start switches the drive ON and START. Stop the drive in according to parameter Stop-Mode and
afterwards switch the drive off.
DO1 6.11 Ready for On. Elektronics powered up, no fault signals present
DO2 6.12 Running. Current controller enabled
DO3 6.13 Fault signal. Converter tripped
DO4 6.14 Zero-speed signal. Motor at standstill
DO5 6.15 Main contactor on. Controlled by START command (DI1)
AI1 5.01 Speed reference Hand
AI2 5.26 Speed reference Auto, from PLC
AO1 6.05 Speed actual
AO2 6.08 Armature current actual
Hand.
Start and stop the drive. DI1=0=STOP , DI1=1=START
Hand control
The drive is started and stopped via digital input DI1.
Speed reference via analog input AI1.
Direction of rotation via digital input DI3.
Selection of speed reference or 1 fixed speed via digital input DI4
Automatic control
The drive is started and stoped via digital input DI8.
Speed reference from PLC via analog input AI2.
Direction of rotation via digital input DI7.
:
:
Hand.
DI3=0=forward, DI3=1=reverse
Auto.
Auto.
DI7=0=forward , DI3=1=reverse
Start and stop the drive. DI8=0=STOP , DI8=1=START
Hand
Overview of Software
Parameter settings,
commissioning
1 - Motor Settings 2 - Operation Mode 3 - Armature 5 - Speed Controller 6 - Input/Output
1.01 Arm Cur Nom 2.01 Macro Select
1.02 Arm Volt Nom 2.02 Cmd Location
1.03 Field Cur Nom 2.03 Stop Mode 3.08 Torque Lim Neg 5.03 Encoder Inc 6.03 AI2 Scale 100%
1.04 Field Volt Nom 2.04 Eme Stop Mode 3.14 Cur Contr Mode
1.05 Base Speed 3.15 Torque Ref Sel
1.06 Max Speed 3.17 Stall Torque 5.11 Eme Stop Ramp 6.06 AO1 Mode
shaded areas are set by macro - all others are set during
3.04 Arm Cur Max 5.01 Speed Ref Sel
[Hand/Auto]
3.07 Torque Lim Pos 5.02 Speed Meas
[Terminals]
[Speed Contr]
[Const Zero]
3.18 Stall Time 5.12 Ramp Shape 6.07 AO1 Scale 100%
[AI1]
Mode
5.09 Accel Ramp 6.04 AI2 Scale 0%
5.10 Decel Ramp
5.13 Fixed Speed 1 6.08 AO2 Assign
5.14 Fixed Speed 2 6.09 AO2 Mode
5.15 Zero Speed Lev 6.10 AO2 Scale 100%
5.16 Speed Level 1 6.11 DO1 Assign
5.17 Speed Level 2 6.12 DO2 Assign
5.19 Jog Accel Ramp 6.13 DO3 Assign
5.20 Jog Decel Ramp 6.14 DO4 Assign
5.21 Alt Par Sel
[Sp < Lev1]
5.26 Aux Sp Ref Sel
[Const Zero]
6.01 AI1 Scale 100%
6.02 AI1 Scale 0%
6.05 AO1 Assign
[Speed Act]
[Arm Cur Act]
[Rdy On]
[Running]
[Fault]
[Zero Speed]
6.15 DO5 Assign
[Main Cont On]
6.22 MSW Bit 11 Ass
[none]
6.23 MSW Bit 12 Ass
[none]
6.24 MSW Bit 13 Ass
[none]
6.25 MSW Bit 14 Ass
[none]
II K 4-10
Page 35

Overview of Software
_
1.03 / 1.04
unit
Field exciter
1.05 / 1.06
1.01 / 1.02
400V 50H z
F1
1
L1 N L1 L2 L3
115...230V 50 Hz
2
135
K1
246
U1 W 1V1 PE
L1
F5
module type and on the supply voltage
the connection of the fan depends on the
module
Converter
~
M
5.03
5.02
Fan
6.14
6.13
6.12
6.11
1
2
F4
4 A
Main contactor ON
98:2
1
98:1
2
F6
K1
12 34 45X99: 1 2 3
X98:
Power supply
6.15
DO5
2.01
0V
0V0V
+
X10: 1 2
_
C 1 D 1
+
U
S
0 V
Z-
Z+
B-
B+
A-
A+
1 2345678
X3:
Zero-speed
Ready for ON
Start/Stop Auto
Direct. of rot. Auto
Emergenc y stop
Fixed spee d / AI1
Direct. of rot. Hand
Hand / Auto
Start/Stop Hand
Fault
Running
Reset
**
mode!
regenerative
* only required in
not re-confi gurable
M
for motor operation
the po larities are shown
+
T
_
T
RXD
X2
PE SHF DG D(N) D(P)SH
8.01 ... 8.16
DDCS
(optical)
ON
BUS
TERMINA TION
Nxxx-01
xxxxxxxx
ADAPTER
TXD
XMIT
REC
'&6
IN
OFF
ERROR
+24V 0V SH
PE SHF DG D(N) D(P)
X1
6.08 / 6.09 / 6.10
6.05 / 6.06 / 6.07
Control board
OUT
+24 V
X8:
&
3
6.03 / 6.04
6.01 / 6.02
X6:
RS232
U
a act
n
act
+10V -10V AO1 AO2 DI1 DI2 DI3 DI4 DI5 DI6 DI7 DI8 +24V DO1DO2 DO3 DO4
n
Auto
ref
AI2
++
__
2
1
S1
0V
+
5.02
AITAC AI1
_
X7:
Parameter
X2:
X1:1234 1234 567 89 X4:12345678910X5:12345
n
Hand
ref
PLC
DCS 400 P AN
Fig. 4.2/3: Connection example application-Macro 3 - Hand/Auto
II K 4-11
Page 36

4.2.4 Macro 4 - Hand/MotPot
Description of I/O’s functionality
I/O Param Function
DI1 Start / Stop. Start and stop the drive. DI1=0=STOP , DI1=1=START.
DI2 Jog speed 1. Speed can be defined in parameter 5.13.
DI3 Direction of rotation. DI3=0=forward , DI3=1=reverse
DI4 2.01 AI1/MotPot, Selection of speed reference or motor pot function.
DI5 Emergency stop. Closed-circuit principle, must be closed for operation
DI6 Reset. Faultacknowledgement, reset faults signaled by the drive
DI7 Motor pot function „faster“. Accel Ramp 5.09
DI8 Motor pot function „slower“. Decel Rampe 5.10. Slower has precedence above faster.
DO1 6.11 Ready for On. Elektronics powered up, no fault signals present
DO2 6.12 Running. Current controller enabled
DO3 6.13 Fault signal. Converter tripped
DO4 6.14 Zero-speed signal. Motor at standstill
DO5 6.15 Main contactor on. Controlled by START command (DI1)
AI1 5.01 Speed reference
AO1 6.05 Speed actual
AO2 6.08 Armature current actual
Overview of Software
Start switches the drive ON and START. Stop the drive in according to parameter Stop-Mode and
afterwards switch the drive off and resets speed reference to zero.
Accel/Decel Ramp for Jogging can be defined in parameter 5.19/5.20.
Jog speed 1 has precedence above AI1
DI4=0=speed reference via AI1 or Jog Speed 1
DI4=1=Motor pot function via DI7 und DI8
Parameter settings, shaded areas are set by macro - all others are set during commissioning
1 - Motor Settings 2 - Operation Mode 3 - Armature 5 - Speed Controller 6 - Input/Output
1.01 Arm Cur Nom 2.01 Macro Select
[Hand/MotPot]
1.02 Arm Volt Nom 2.02 Cmd Location
[Terminals]
1.03 Field Cur Nom 2.03 Stop Mode 3.08 Torque Lim Neg 5.03 Encoder Inc 6.03 AI2 Scale 100%
1.04 Field Volt Nom 2.04 Eme Stop Mode 3.14 Cur Contr Mode
1.05 Base Speed 3.15 Torque Ref Sel
1.06 Max Speed 3.17 Stall Torque 5.11 Eme Stop Ramp 6.06 AO1 Mode
3.04 Arm Cur Max 5.01 Speed Ref Sel
[AI1]
3.07 Torque Lim Pos 5.02 Speed Meas
Mode
5.09 Accel Ramp 6.04 AI2 Scale 0%
[Speed Contr]
5.10 Decel Ramp
[AI2]
3.18 Stall Time 5.12 Ramp Shape 6.07 AO1 Scale 100%
5.13 Fixed Speed 1 6.08 AO2 Assign
5.14 Fixed Speed 2 6.09 AO2 Mode
5.15 Zero Speed Lev 6.10 AO2 Scale 100%
5.16 Speed Level 1 6.11 DO1 Assign
5.17 Speed Level 2 6.12 DO2 Assign
5.19 Jog Accel Ramp 6.13 DO3 Assign
5.20 Jog Decel Ramp 6.14 DO4 Assign
5.21 Alt Par Sel
[Sp < Lev1]
5.26 Aux Sp Ref Sel
[Const Zero]
6.01 AI1 Scale 100%
6.02 AI1 Scale 0%
6.05 AO1 Assign
[Speed Act]
[Arm Cur Act]
[Rdy On]
[Running]
[Fault]
[Zero Speed]
6.15 DO5 Assign
[Main Cont On]
6.22 MSW Bit 11 Ass
[none]
6.23 MSW Bit 12 Ass
[none]
6.24 MSW Bit 13 Ass
[none]
6.25 MSW Bit 14 Ass
[none]
II K 4-12
Page 37

Overview of Software
_
1.03 / 1.04
unit
Field exciter
1.05 / 1.06
1.01 / 1.02
400V 50H z
F1
1
L1 N L1 L2 L3
115...230V 50 Hz
2
135
K1
246
U1 W 1V1 PE
L1
F5
module type and on the supply voltage
the connection of the fan depends on the
module
Converter
~
M
5.03
5.02
Fan
6.14
6.13
6.12
6.11
1
2
F4
4 A
Main contactor ON
98:2
1
98:1
2
F6
K1
12 34 45X99: 1 2 3
X98:
Power supply
6.15
DO5
2.01
C 1 D 1
0V
0V0V
+
X10: 1 2
_
+
U
S
0 V
Z-
Z+
B-
B+
A-
A+
1 2345678
X3:
Zero-speed
Running
Ready for ON
Decrease speed
Increase speed
Emergenc y stop
AI1 / MotPot
Direction of ro tation
Start/Stop
Fault
Reset
Jogging
**
mode!
regenerative
* only required in
not re-confi gurable
M
for motor operation
the po larities are shown
+
T
_
T
RXD
X2
PE SHF DG D(N) D(P)SH
8.01 ... 8.16
DDCS
(optical)
ON
BUS
TERMINA TION
Nxxx-01
xxxxxxxx
ADAPTER
TXD
XMIT
REC
'&6
IN
OFF
ERROR
+24V 0V SH
PE SHF DG D(N) D(P)
X1
6.08 / 6.09 / 6.10
6.05 / 6.06 / 6.07
Control board
OUT
+24 V
X8:
&
3
6.03 / 6.04
6.01 / 6.02
X6:
RS232
I
a act
n
act
+10V -10V AO1 AO2 DI1 DI2 DI3 DI4 DI5 DI6 DI7 DI8 +24V DO1DO2 DO3 DO4
AI2
++
__
2
1
X2:
S1
0V
+
5.02
AITAC AI1
_
X7:
Parameter
X1:1234 1234 567 89 X4:12345678910X5:12345
n
ref
DCS 400 P AN
Fig. 4.2/4: Connection example application-Macro 4 - Hand/MotPot
II K 4-13
Page 38

4.2.5 Macro 5 - Jogging
Description of I/O’s functionality
Mutual locking of Jog speed 1 – Jog speed 2 – Drive START
Overview of Software
I/O Param Function
DI1 Direction of rotation. DI1=0=forward , DI1=1=reverse
DI2 Jog speed 1. Speed can be defined in parameter 5.13.
DI3 Jog speed 2. Speed can be defined in parameter 5.14.
DI4 2.01 not used
DI5 Emergency stop. Closed-circuit principle, must be closed for operation
DI6 Reset. Faultacknowledgement, reset faults signaled by the drive
DI7 Drive ON / OFF. DI7=0=OFF , DI7=1=ON
DI8 Drive START / STOP. DI8=0=STOP , DI8=1=START
DO1 6.11 Ready for Run. Converter switched ON, but not yet STARTed
DO2 6.12 Zero-speed signal. Motor at standstill
DO3 6.13 At set point. Speed reference = speed actual
DO4 6.14 Group fault signal. Common signal for all faults or alarms
DO5 6.15 Main contactor on. Controlled by ON command (DI7)
AI1 5.01 Speed reference
AI2 5.26 Additional speed reference
AO1 6.05 Speed actual
AO2 6.08 Torque actual
Jog 1
DI2
0 0 0 Drive is STOPped (Current controller disabled)
1 0 0 Drive STARTed via DI1 , speed reference=parameter 5.13
x 1 0 Drive STARTed via DI2 , speed reference=parameter 5.14
x x 1 Drive STARTed via START command (DI8) , speed reference via analog input AI1
Jog 2
DI3
Accel/Decel Ramp for Jogging can be defined in parameter 5.19/5.20.
Accel/Decel Ramp for Jogging can be defined in parameter 5.19/5.20.
START
DI8
Drive is ON (DI7=1)
Parameter settings, shaded areas are set by macro - all others are set during
commissioning
1 - Motor Settings 2 - Operation Mode 3 - Armature 5 - Speed Controller 6 - Input/Output
1.01 Arm Cur Nom 2.01 Macro Select
[Jogging]
1.02 Arm Volt Nom 2.02 Cmd Location
[Terminals]
1.03 Field Cur Nom 2.03 Stop Mode 3.08 Torque Lim Neg 5.03 Encoder Inc 6.03 AI2 Scale 100%
1.04 Field Volt Nom 2.04 Eme Stop Mode 3.14 Cur Contr Mode
1.05 Base Speed 3.15 Torque Ref Sel
1.06 Max Speed 3.17 Stall Torque 5.11 Eme Stop Ramp 6.06 AO1 Mode
3.04 Arm Cur Max 5.01 Speed Ref Sel
[AI1]
3.07 Torque Lim Pos 5.02 Speed Meas
Mode
5.09 Accel Ramp 6.04 AI2 Scale 0%
[Speed Contr]
5.10 Decel Ramp
[Const Zero]
3.18 Stall Time 5.12 Ramp Shape 6.07 AO1 Scale 100%
5.13 Fixed Speed 1 6.08 AO2 Assign
5.14 Fixed Speed 2 6.09 AO2 Mode
5.15 Zero Speed Lev 6.10 AO2 Scale 100%
5.16 Speed Level 1 6.11 DO1 Assign
5.17 Speed Level 2 6.12 DO2 Assign
5.19 Jog Accel Ramp 6.13 DO3 Assign
5.20 Jog Decel Ramp 6.14 DO4 Assign
5.21 Alt Par Sel
[Sp < Lev1]
5.26 Aux Sp Ref Sel
[AI2]
6.01 AI1 Scale 100%
6.02 AI1 Scale 0%
6.05 AO1 Assign
[Speed Act]
[Torque Act]
[Rdy for Run]
[Zero Speed]
[At Setpoint]
[Flt or Alarm]
6.15 DO5 Assign
[Main Cont On]
6.22 MSW Bit 11 Ass
[none]
6.23 MSW Bit 12 Ass
[none]
6.24 MSW Bit 13 Ass
[none]
6.25 MSW Bit 14 Ass
[none]
II K 4-14
Page 39

Overview of Software
_
1.03 / 1.04
unit
Field exciter
1.05 / 1.06
1.01 / 1.02
400V 50H z
F1
1
L1 N L1 L2 L3
115...230V 50 Hz
2
135
K1
246
U1 W 1V1 PE
L1
F5
module type and on the supply voltage
the connection of the fan depends on the
module
Converter
~
M
5.03
5.02
Fan
6.14
6.13
6.12
6.11
1
2
F4
4 A
Main contactor ON
98:2
1
98:1
2
F6
K1
12 34 45X99: 1 2 3
X98:
Power supply
6.15
DO5
2.01
X10: 1 2
C 1 D 1
1 2345678
X3:
0V
0V0V
+
_
+
U
S
0 V
Z-
Z+
B-
B+
A-
A+
Fault or Alar m
speed level re ached
Zero-speed
Ready for Run
Run
On/Off
Reset
Emergenc y stop
Jogging 2
Jogging 1
Direction of ro tation
**
mode!
regenerative
* only required in
Q
R
L
W
D
W
S
D
G
$
R
U
F
D
re-configu rable in
parameter group 9
0
M
for motor operation
the po larities are shown
+
T
_
T
RXD
X2
PE SHF DG D(N) D(P)SH
8.01 ... 8.16
DDCS
(optical)
ON
BUS
TERMINA TION
Nxxx-01
xxxxxxxx
ADAPTER
TXD
XMIT
REC
'&6
IN
OFF
ERROR
+24V 0V SH
PE SHF DG D(N) D(P)
X1
6.08 / 6.09 / 6.10
6.05 / 6.06 / 6.07
Control board
OUT
+24 V
X8:
&
3
6.03 / 6.04
6.01 / 6.02
X6:
RS232
T
act
n
act
+10V -10V AO1 AO2 DI1 DI2 DI3 DI4 DI5 DI6 DI7 DI8 +24V DO1DO2 DO3 DO4
additiona l n
ref
AI2
++
__
2
1
X2:
S1
0V
+
5.02
AITAC AI1
_
X7:
Parameter
X1:1234 1234 567 8 9 X4:12345678910X5:12345
n
ref
DCS 400 P AN
Fig. 4.2/5: Connection example application-Macro 5 - Jogging
II K 4-15
Page 40

4.2.6 Macro 6 - Motor Pot
Description of I/O’s functionality
I/O Param Function
DI1 Direction of rotation. DI1=0=forward , DI1=1=reverse
DI2 Motor pot function „faster“.Accel Ramp 5.09
DI3 Motor pot function „slower“. Decel Ramp 5.10.
DI4 2.01 Minimum speed. Speed can be defined in parameter 5.13. When the drive is STARTed the speed
DI5 Emergency stop. Closed-circuit principle, must be closed for operation
DI6 Reset. Faultacknowledgement, reset faults signaled by the drive
DI7 Drive ON / OFF. DI7=0=OFF, Reset of MotPot Speed to zero; DI7=1=ON
DI8 Drive START / STOP. DI8=0=STOP; DI8=1=START, Accelerates to last MotPot Speed
DO1 6.11 Ready for Run. Converter switched ON, but not yet STARTed
DO2 6.12 n
DO3 6.13 n
DO4 6.14 Group fault signal. Common signal for all faults or alarms
DO5 6.15 Main contactor on. Controlled by ON command (DI7)
AO1 6.05 Speed actual
AO2 6.08 Armature voltage actual
Overview of Software
Slower has precedence above faster.
will be accelerated to this minimum speed and it is not possible to set the speed below this minimum
with motor pot function.
reached (n
max
reached (n
min
can be defined in parameter 5.16) n
max
can be defined in parameter 5.17) n
min
≥ Level 1 / Level2
act
≥ Level 1
act
Parameter settings, shaded areas are set by macro - all others are set during commissioning
1 - Motor Settings 2 - Operation Mode 3 - Armature 5 - Speed Controller 6 - Input/Output
1.01 Arm Cur Nom 2.01 Macro Select
[Motor Pot]
1.02 Arm Volt Nom 2.02 Cmd Location
[Terminals]
3.04 Arm Cur Max 5.01 Speed Ref Sel
[Const Zero]
3.07 Torque Lim Pos 5.02 Speed Meas
Mode
6.01 AI1 Scale 100%
6.02 AI1 Scale 0%
1.03 Field Cur Nom 2.03 Stop Mode 3.08 Torque Lim Neg 5.03 Encoder Inc 6.03 AI2 Scale 100%
1.04 Field Volt Nom 2.04 Eme Stop Mode 3.14 Cur Contr Mode
5.09 Accel Ramp 6.04 AI2 Scale 0%
[Speed Contr]
1.05 Base Speed 3.15 Torque Ref Sel
[AI2]
5.10 Decel Ramp
6.05 AO1 Assign
[Speed Act]
1.06 Max Speed 3.17 Stall Torque 5.11 Eme Stop Ramp 6.06 AO1 Mode
3.18 Stall Time 5.12 Ramp Shape 6.07 AO1 Scale 100%
5.13 Fixed Speed 1 6.08 AO2 Assign
[Arm Volt Act]
5.14 Fixed Speed 2 6.09 AO2 Mode
5.15 Zero Speed Lev 6.10 AO2 Scale 100%
5.16 Speed Level 1 6.11 DO1 Assign
[Rdy for Run]
5.17 Speed Level 2 6.12 DO2 Assign
[Speed > Lev 1]
5.19 Jog Accel Ramp 6.13 DO3 Assign
[Speed > Lev 2]
5.20 Jog Decel Ramp 6.14 DO4 Assign
[Flt or Alarm]
5.21 Alt Par Sel
[Sp < Lev1]
5.26 Aux Sp Ref Sel
[Const Zero]
6.15 DO5 Assign
[Main Cont On]
6.22 MSW Bit 11 Ass
[none]
6.23 MSW Bit 12 Ass
[none]
6.24 MSW Bit 13 Ass
[none]
6.25 MSW Bit 14 Ass
[none]
II K 4-16
Page 41

Overview of Software
_
1.03 / 1.04
unit
Field exciter
1.05 / 1.06
1.01 / 1.02
400V 50H z
F1
1
L1 N L1 L2 L3
115...230V 50 Hz
2
135
K1
246
U1 W 1V1 PE
L1
F5
module type and on the supply voltage
the connection of the fan depends on the
module
Converter
~
M
5.03
5.02
Fan
6.14
6.13
6.12
6.11
1
2
F4
4 A
Main contactor ON
98:2
1
98:1
2
F6
K1
12 34 45X99: 1 2 3
X98:
Power supply
6.15
DO5
2.01
C 1 D 1
0V
0V0V
+
X10: 1 2
_
+
U
S
0 V
Z-
Z+
B-
B+
A-
A+
1 2345678
X3:
Fault or Alar m
n
reach ed
min
n
reach ed
max
Ready for Run
Emergenc y stop
Min spee d
Decrease speed
Increase speed
Direction of ro tation
**
Run
On/Off
Reset
M
mode!
regenerative
* only required in
Q
R
L
W
D
W
S
D
G
$
R
U
F
D
re-configu rable in
parameter group 9
0
for motor operation
the po larities are shown
+
T
_
T
RXD
X2
PE SHF DG D(N) D(P)SH
8.01 ... 8.16
DDCS
(optical)
ON
BUS
TERMINA TION
Nxxx-01
xxxxxxxx
ADAPTER
TXD
XMIT
REC
'&6
IN
OFF
ERROR
+24V 0V SH
PE SHF DG D(N) D(P)
X1
6.08 / 6.09 / 6.10
6.05 / 6.06 / 6.07
Control board
OUT
+24 V
X8:
&
3
6.03 / 6.04
6.01 / 6.02
X6:
RS232
U
a act
n
act
+10V -10V AO1 AO2 DI1 DI2 DI3 DI4 DI5 DI6 DI7 DI8 +24V DO1DO2 DO3 DO4
AI2
++
__
2
1
X2:
S1
0V
+
5.02
AITAC AI1
_
X7:
Parameter
X1:1234 1234 567 89 X4:12345678910X5:12345
DCS 400 P AN
Fig. 4.2/6: Connection example application-Macro 6 - Motor Pot
II K 4-17
Page 42

4.2.7 Macro 7 - ext Field Rev with remanence contactor
Overview of Software
Description of I/O’s functionality
I/O Param Function
DI1 External field reversal with external field reversing switch. Only for 2Q application.
DI2 2.01 Jog speed 1. Speed can be defined in parameter 5.13.
DI3 External fault signal. Triggers a fault response and trips the drive
DI4 External alarm signal. Triggers a warning in DCS400
DI5 Emergency stop. Closed-circuit principle, must be closed for operation
DI6 Reset. Faultacknowledgement, reset faults signaled by the drive
DI7 Drive ON / OFF. DI7=0=OFF , DI7=1=ON
DI8 Drive START / STOP. DI8=0=STOP , DI8=1=START
DO1 6.11 Ready for Run. Converter switched ON, but not yet STARTed
DO2 6.12 Running. Drive is STARTed (Current controller enabled)
DO3 6.13 Field reversal active
DO4 6.14 Group fault signal. Common signal for all faults or alarms
DO5 6.15 Main contactor on. Controlled by ON command (DI7)
AI1 5.01 Speed reference
AI2 3.15 External torque limitation possible. First the parameter Cur Contr Mode 3.14 has to be changed
AO1 6.05 Speed actual
AO2 6.08 Armatue voltage actual
Parameter settings, shaded areas are set by macro - all others are set during commissioning
1 - Motor Settings 2 - Operation Mode 3 - Armature 5 - Speed Controller 6 - Input/Output
1.01 Arm Cur Nom 2.01 Macro Select
1.02 Arm Volt Nom 2.02 Cmd Location
1.03 Field Cur Nom 2.03 Stop Mode 3.08 Torque Lim Neg 5.03 Encoder Inc 6.03 AI2 Scale 100%
1.04 Field Volt Nom 2.04 Eme Stop Mode 3.14 Cur Contr Mode
1.05 Base Speed 3.15 Torque Ref Sel
1.06 Max Speed 3.17 Stall Torque 5.11 Eme Stop Ramp 6.06 AO1 Mode
DI1=0=no field reversal
DI1=1=field reversal
Depend on field reversal (DI1=1) the signal „Field reversal active“ has log. state „1“.
Field reversal is only possible when the drive is OFF (DI7=0).
When field reversal is active the polarity of speed actual value is changed in the software.
It’s recommended to use a remanence contactor relay to store the state of this relay when the main
supply failes. Otherwise the relay contactors can burn due to the field inductance.
Accel/Decel Ramp for Jogging can be defined in parameter 5.19/5.20.
from Macro depend to Lim Sp Ctr. Without changes the factory settings for torque limitation is
effective (100%).
[ext Field Rev]
[Terminals]
3.04 Arm Cur Max 5.01 Speed Ref Sel
[AI1]
3.07 Torque Lim Pos 5.02 Speed Meas
Mode
5.09 Accel Ramp 6.04 AI2 Scale 0%
[Speed Contr]
5.10 Decel Ramp
[AI2]
3.18 Stall Time 5.12 Ramp Shape 6.07 AO1 Scale 100%
5.13 Fixed Speed 1 6.08 AO2 Assign
5.14 Fixed Speed 2 6.09 AO2 Mode
5.15 Zero Speed Lev 6.10 AO2 Scale 100%
5.16 Speed Level 1 6.11 DO1 Assign
5.17 Speed Level 2 6.12 DO2 Assign
5.19 Jog Accel Ramp 6.13 DO3 Assign
5.20 Jog Decel Ramp 6.14 DO4 Assign
5.21 Alt Par Sel
[Sp < Lev1]
5.26 Aux Sp Ref Sel
[Const Zero]
6.01 AI1 Scale 100%
6.02 AI1 Scale 0%
6.05 AO1 Assign
[Speed Act]
[Arm Volt Act]
[Rdy for Run]
[Running]
[FieldReverse]
[Flt or Alarm]
6.15 DO5 Assign
[Main Cont On]
6.22 MSW Bit 11 Ass
[none]
6.23 MSW Bit 12 Ass
[none]
6.24 MSW Bit 13 Ass
[none]
6.25 MSW Bit 14 Ass
[none]
Short description
Non Field Reversal Mode:
• DI1 = 0 V (contact open),
only effective if drive is in
OFF state (DI 7 = 0) ð DO3
= 0 V - non active ð Relay
K2 is in „off" position ð Contactor K3 is in „non reversal"
position.
• If anything happens now
with power supply / electronics supply, contactor K3
will keep the "non reversal"
position.
Field Reversal Mode:
• DI1 = +24V (contact
closed), only effective if drive
is in OFF state (DI 7 = 0) ð
DO3 = +24V relay K2 is energized ð Relay contact K2
is in "on" position ð Contac-
tor K3 is in „reversal" position.
If anything happens now with
power supply / electronics
supply then:
• If shut down of power supply contactor K3 will keep
the „reversal" position.
• If shut down of electronics
supply (phase L1) then electronics supply and supply
for remanence contactor
failes at the same time.
Relay K2 will keep the "on"
position for a while until shut
down of SDCS-CON-3A.
Contactor K3 can not switch
over from "on" to "off" position because of phase L1 is
interrupted.
Contactor k3 will keep the
„reversal" position.
When phase L1 is returning
then:
• Contactor K3 switches over
to "off" position.
• After signal „Field reversal
active" is active again relay
K2 switches contactor K3 to
"on" position again but the
drive is in OFF state at this
moment.
The drive can be started now
in "Field Reversal Mode"
again.
II K 4-18
Page 43

Overview of Software
field reversal
_
1.03 / 1.04
unit
Field exciter
X10: 1 2
_
1.05 / 1.06
1.01 / 1.02
400V 50H z
F1
1
L1 N L1 L2 L3
115...230V 50 Hz
2
135
K1
246
U1 W 1V1 PE
L1
F5
1
F7
Field revers al ON
2
Field revers al OFF
K2
1
2
F4
4 A
1
2
F6
K3
module type and on the supply voltage
the connection of the fan depends on the
contactor
Remanence
Main contactor ON
98:2
98:1
K1
12 34 45X99: 1 2 3
X98:
module
Converter
C 1 D 1
0 V
~
M
5.03
5.02
Fan
1 2345678
X3:
6.14
0V
6.13
6.12
6.11
Power supply
6.15
DO5
0V0V
2.01
K3 energized
+
no field reversal
K3 de-energized
+
U
S
Z-
Z+
B-
B+
A-
A+
Fault or Alar m
Field reversa l activ.
Running
Ready for Run
Run
On/Off
Reset
Emergenc y stop
User Alarm
User Fault
Jogging 1
Field revers al
K3
**
mode!
regenerative
* only required in
K2
re-configu rable in
parameter group 9
M
for motor operation
the po larities are shown
+
T
Q
R
L
W
D
W
S
D
G
$
R
U
F
D
0
_
T
RXD
X2
PE SHF DG D(N) D(P)SH
8.01 ... 8.16
DDCS
(optical)
ON
BUS
TERMINA TION
Nxxx-01
xxxxxxxx
ADAPTER
TXD
XMIT
REC
'&6
IN
OFF
ERROR
+24V 0V SH
PE SHF DG D(N) D(P)
X1
6.08 / 6.09 / 6.10
6.05 / 6.06 / 6.07
Control board
OUT
+24 V
X8:
&
3
6.03 / 6.04
6.01 / 6.02
X6:
RS232
U
a act
n
act
+10V -10V AO1 AO2 DI1 DI2 DI3 DI4 DI5 DI6 DI7 DI8 +24V DO1DO2 DO3 DO4
T
ref
AI2
++
__
2
1
X2:
S1
0V
+
5.02
AITAC AI1
_
X7:
Parameter
X1:1234 1234 567 8 9 X4:12345678910X5:12345
n
ref
DCS 400 P AN
Fig. 4.2/7: Connection example application-Macro 7 - ext Field Rev
II K 4-19
Page 44

4.2.8 Macro 8 - Torque Ctrl
Description of I/O’s functionality
I/O Param Funktion
DI1 COAST. Closed-circuit principle, must be closed for operation.
DI2 not used
DI3 External fault signal. Triggers a fault response and trips the drive
DI4 2.01 External alarm signal. Triggers a warning in DCS400
DI5 Emergency stop. Closed-circuit principle, must be closed for operation.
DI6 Reset. Faultacknowledgement, reset faults signaled by the drive
DI7 Drive ON / OFF. DI7=0=OFF , DI7=1=ON
DI8 Drive START / STOP. DI8=0=STOP , DI8=1=START.
DO1 6.11 Ready for Run. Converter switched ON, but not yet STARTed
DO2 6.12 Running. Drive is STARTed (Current controller enabled)
DO3 6.13 Zero-speed signal. Motor at standstill
DO4 6.14 Group fault signal. Common signal for all faults or alarms
DO5 6.15 Main contactor on. Controlled by ON command (DI7)
AI1 3.15 Torque reference
AO1 6.05 Speed actual
AO2 6.08 Torque actual
Overview of Software
COAST is the fastest way to stop the current controller. The current controller will decrease the
armature current to zero as fast as possible. This command will stop the drive so that the motor is
left running and friction together with the load will decrease the speed to zero.
In case of Emergencey stop the drive will be changed to speed control and stopped the drive in
according to parameter Eme Stop Mode (2.04)
In case of STOP command the drive will be changed to speed control and stopped the drive in
according to parameter Stop Mode (2.03).
Parameter settings, shaded areas are set by macro - all others are set during commissioning
1 - Motor Settings 2 - Operation Mode 3 - Armature 5 - Speed Controller 6 - Input/Output
1.01 Arm Cur Nom 2.01 Macro Select
[Torque Cntrl]
1.02 Arm Volt Nom 2.02 Cmd Location
[Terminals]
1.03 Field Cur Nom 2.03 Stop Mode 3.08 Torque Lim Neg 5.03 Encoder Inc 6.03 AI2 Scale 100%
1.04 Field Volt Nom 2.04 Eme Stop Mode 3.14 Cur Contr Mode
1.05 Base Speed 3.15 Torque Ref Sel
1.06 Max Speed 3.17 Stall Torque 5.11 Eme Stop Ramp 6.06 AO1 Mode
3.04 Arm Cur Max 5.01 Speed Ref Sel
[Const Zero]
3.07 Torque Lim Pos 5.02 Speed Meas
Mode
5.09 Accel Ramp 6.04 AI2 Scale 0%
[Torque Contr]
5.10 Decel Ramp
[AI1]
3.18 Stall Time 5.12 Ramp Shape 6.07 AO1 Scale 100%
5.13 Fixed Speed 1 6.08 AO2 Assign
5.14 Fixed Speed 2 6.09 AO2 Mode
5.15 Zero Speed Lev 6.10 AO2 Scale 100%
5.16 Speed Level 1 6.11 DO1 Assign
5.17 Speed Level 2 6.12 DO2 Assign
5.19 Jog Accel Ramp 6.13 DO3 Assign
5.20 Jog Decel Ramp 6.14 DO4 Assign
5.21 Alt Par Sel
[Sp < Lev1]
5.26 Aux Sp Ref Sel
[Const Zero]
6.01 AI1 Scale 100%
6.02 AI1 Scale 0%
6.05 AO1 Assign
[Speed Act]
[Torque Act]
[Rdy for Run]
[Running]
[Zero Speed]
[Flt or Alarm]
6.15 DO5 Assign
[Main Cont On]
6.22 MSW Bit 11 Ass
[none]
6.23 MSW Bit 12 Ass
[none]
6.24 MSW Bit 13 Ass
[none]
6.25 MSW Bit 14 Ass
[none]
II K 4-20
Page 45

Overview of Software
_
1.03 / 1.04
unit
Field exciter
1.05 / 1.06
1.01 / 1.02
400V 50H z
F1
1
L1 N L1 L2 L3
115...230V 50 Hz
2
135
K1
246
U1 W 1V1 PE
L1
F5
module type and on the supply voltage
the connection of the fan depends on the
module
Converter
~
M
5.03
5.02
Fan
6.14
6.13
6.12
6.11
1
2
F4
4 A
Main contactor ON
98:2
1
98:1
2
F6
K1
12 34 45X99: 1 2 3
X98:
Power supply
6.15
DO5
2.01
0V
0V0V
+
X10: 1 2
_
C 1 D 1
+
U
S
0 V
Z-
Z+
B-
B+
A-
A+
1 2345678
X3:
Emergenc y stop
Fault or Alar m
n=0
Running
Ready for Run
Run
On/Off
Reset
User Alarm
User Fault
Coast
**
mode!
regenerative
* only required in
Q
R
L
W
D
W
S
D
G
$
R
U
F
D
re-configu rable in
parameter group 9
0
M
for motor operation
the po larities are shown
+
T
_
T
RXD
X2
PE SHF DG D(N) D(P)SH
8.01 ... 8.16
DDCS
(optical)
ON
BUS
TERMINA TION
Nxxx-01
xxxxxxxx
ADAPTER
TXD
XMIT
REC
'&6
IN
OFF
ERROR
+24V 0V SH
PE SHF DG D(N) D(P)
X1
6.08 / 6.09 / 6.10
6.05 / 6.06 / 6.07
Control board
OUT
+24 V
X8:
&
3
6.03 / 6.04
6.01 / 6.02
X6:
RS232
I
a act
n
act
+10V -10V AO1 AO2 DI1 DI2 DI3 DI4 DI5 DI6 DI7 DI8 +24V DO1DO2 DO3 DO4
AI2
2
1
X2:
S1
0V
+++
5.02
AITAC AI1
___
X7:
Parameter
X1:1234 1234 567 8 9 X4:12345678910X5:12345
T
ref
DCS 400 P AN
Fig. 4.2/8: Connection example application-Macro 8 - Torque Ctrl
II K 4-21
Page 46

4.3 Digital and analogue Inputs/Outputs
Overview of Software
Digital inputs DI1…DI8
The drive is controlled via the digital inputs DI1…DI8.
The significance of the inputs are defined by a macro.
When you select a macro in the Macro Select (2.01)
parameter the functions are assigned to the 8 digital
inputs. The functions are described in the context of
respective macros in section
4.2 Application Macros
The functions of the digital inputs DI1...DI4 of macros
1, 5, 6, 7 and 8 are re-configurable via parameter
group 9.
Digital outputs DO1…DO5
Any signal of a signal list can be assigned to each
digital output. The list is available in the parameters of
the digital outputs DO1…DO5 (DO1 Assign
(6.11)…DO5 Assign (6.15)). The significance and/or
mode of operation of the signals is described there.
The outputs are connected with the application macro
by default i.e. changing the macro will change the
significance of the outputs. The linking of the macro
will be revoked if you allocate another signal. Then the
output will keep its significance even if the setting of
the macro changes.
Analog inputs AI1…AI2 (11 Bits + sign)
The analog inputs are 10V inputs. Offset voltages for
0% and 100% reference can be entered into the
scaling parameters 6.01…6.04:
e.g.: A reference value is preset by means of a
potentiometer. The zero position of the potentiometer
is not exactly 0V but 0.8V and the full-scale deflection
is not exactly 10V but 9.3 V. Enter 9.30 V into
parameter AIx Scale 100 % (6.01 / 6.03) and 0.80V
into parameter AIx Scale 0 % (6.02 / 6.04). The range
between 0.80V and 9.30V is then considered to be the
100% reference value.
Analog outputs AO1…AO2 (11 Bits + sign)
Any actual value of an actual value list can be assigned to the analog outputs. The list is available in
the AOx Assign parameters (6.05 / 6.08). The outputs
are connected with the application macro by default
i.e. changing the macro will change the significance of
the outputs. The linking of the macro will be revoked
if you allocate another actual value. Then the output
will keep its new significance even if the setting of the
macro changes.
Using the parameter AOx Mode (6.06 / 6.09) you can
choose between unipolar (0…10V) or bipolar
(-10V…0V…+10V) output.
The parameters AOx Scale 100 % (6.07 / 6.10) define
which voltage level corresponds to 100% actual value.
E.g.: A 200% armature current is required in a drive.
These 200% can be represented maximally by 10V.
According to a simple formula:
(10V / 200%) x 100%
AOx Scale shall be set to 5.00V (=100% armature
current).
Tachogenerator input (11 Bits + sign)
The speed feedback with tachogenerator is set with
the parameter Speed Meas mode (5.02) = Tacho. The
tachogenerator shall be connected to the appropriate
inputs of the terminal block corresponding to its
voltage level. The maximum tachogenerator voltage
.
at maximum speed is decisive, e.g.:
Tachogenerator selection: 60 V / 1000 rpm
max. motor speed: 3000 rpm
max. tachogenerator voltage: 180V
-
X1:1
-
T
+
90-270 V
30-90 V
2
-
3
+
4
8-30 V
R115
S1
100k
1n
100k 100k
2
1
GND
1n
The right connections for this tachogenerator are X1:1
and X1:4
Some applications may require that the voltage potential of the tachogenerator be connected to the 0V
potential of the converter and/or not be connected.
This setting is made with the jumper S1:1-2.
S1:1-2 jumpered: 0V connection between tachogen-
erator and converter
S1:1-2 open: no 0V connection
If a tachogenerator feedback is used the speed will
require adjustment by means of potentiometer R115.
The control panel or the PC tool support the adjustment during the prompted start-up.
Encoder inputs ChA+…ChZ-
Speed feedback with a encoder is set in the parameter Speed Meas Mode (5.02) = Encoder and the
encoder increments per revolution are set with the
parameter Encoder Inc (5.03). The supply voltage for
the encoder can be taken from the converter by
setting the jumper appropriately.
Jumper setting S2: 10-11 +5V encoder supply
S2: 11-12 +24V encoder supply
Connecting the signal lines can be unsymmetrical
(without inverted signals) to the terminals X3:1 and
X3:3 or symmetrical (with inverted signals) to
X3:1...X3:4. The Z signal (including the inverted signal) is not needed in the DCS400.
Jumper S2:
unsymmetrical:
jumpered
ChA- 2-3
ChB- 5-6
ChA +
ChA -
ChB +
ChB -
ChZ +
ChZ 0V
U
S
symmetrical:
jumpered
ChA- 1-2
ChB- 4-5
X3:1
120 Ω
2
3
120
4
5
120
6
7
8
S2
12
45
Ω
78
Ω
10 11 12
+5V +24V
100k
3
6
9
+5/+24V
+5/+24V
+5/+24V
II K 4-22
Page 47

DCS400 accuracy
Analog values will be converted to digital values via
Anlog Digital Converter (ADC). The accuracy of resolution depends on how much bits are used and is
related to 100%. Bipolar values are marked at most
significant bit (sign bit).
Resolution of DCS400 inputs and outputs:
Resolution Steps Input / Output Accuracy
Drive controlled by Serial Communication
15 Bit + sign ±20000 Speed reference/actual val. 0.005%
±4095 all other reference/actual val. 0.025%
Drive controlled by digital/analogue I/O
14 Bit + sign ±16383 Incremental Encoder 0.006%
12 Bit + sign ±4095 Current / Torque 0.025%
11 Bit + sign ±2047 AI1, AI2 0.05%
11 Bit + sign ±2047 AITAC (10V=125%) 0.06%
11 Bit + sign ±2047 AO1, AO2 0.05%
If serial communication is used all reference and
actual values are representet in a 16 bit data word
scaled between +32767 and -32768. For speed reference/actual values only ±20000 are used, all other
reference/actual values are scaled to ±4095.
Overview of Software
If tacho feedback is used the nominal speed value is
scaled to 80% of full resolution. A speed measurement up to 125% of nominal speed is possible. The
accuracy is 0,06% related to nominal speed.
Drive controlled by Serial Communication
COM
Drive controlled by digital I/O
AO
AI
Drive controlled by digital I/O
AO
AI
Speed reference
Speed actual
value
Speed reference
Speed reference
Speed reference
accuracy
Speed reference
accuracy
Speed reference
accuracy
PLC
ELWVLJQ
• No additional analogue/digital I/O's necessary
• Most flexibility regarding reference/actual value transmission
PLC
ELWVLJQ
PLC
ELWVLJQ
Speed actual
value
Speed actual
value
DCS 400
Fieldbus
Encoder 14 bit+sign
Speed accuracy = 0.006%
DCS 400
AI (11 bit+sign)
AO (11 bit+sign)
Encoder 14 bit+sign
Speed accuracy = 0.006%
DCS 400
AI (11 bit+sign)
AO (11 bit+sign)
M
E
M
E
M
T
Tacho 11 bit+sign
Speed accuracy = 0.06%
Fig. 4.3/1: Comparison regarding the accuracy between the different control modes
II K 4-23
Page 48

4.4 Drive Logic
Overview of Software
The drive logic controls the switching on and off of the
converter and the motor and protects both in exceptional situations, in case of fault or emergency stop.
This logic switches on the main contactor, the fans
and the field supply. The drive logic uses rising/falling
edges, i.e. it responds to 0-1 and 1-0 signal changes.
Switching on and off
The main commands for switching the drive on and off
are ON and RUN. The behaviour during switching on
and off with the default setting is described below.
Switching on
When the electronic supply has been switched on (or
after a fault) the ON and the RUN command must be
reset to "0" before logic will accept the switching on
commands.
The rising edge of the ON command switches on the
main contactor, the fans and the field supply and the
converter synchronizes itself to the mains.
The rising edge of the RUN command (starting the
drive) enables the ramp generator, the current and
speed controller and the drive accelerates to the
speed reference value on the ramp set with Accel
Ramp (5.09).
Other behaviour during switching on and off
Switching off modes other than the default setting can
be selected with Stop Mode (2.03):
If Stop Mode (2.03) = Torque Lim, the internal speed
reference is set to 0 rpm and speed controller brakes
the drive along the torque and/or current limit. This
requires the balancing of the speed controller before
braking. After the minimum speed has been reached
the pulses are blocked, the main contactor, the fans
and the field supply are switched off and thereby the
drive is disconnected from the main.
Stop Mode (2.03) = Coast blocks the pulses and the
drive is coasting without control.
If Start Mode (2.09) = Start from Zero is set and the
RUN command is output again during stopping this
command will be ineffective, i.e. the drive will not start
again by itself after the minimum speed has been
reached. Only if the RUN command is reset and set
again during standstill the drive can be started again.
Switching off with emergency stop
In addition to ON or RUN the drive can be stopped with
the Eme Stop command. The procedure is as follows
with the default values:
The RUN command can be set simultaneously with
the ON command.
Switching off
The falling edge of the RUN command (stopping the
drive) and Stop Mode (2.03) = Ramp brake the drive
on the ramp set with Decel Ramp (5.10), until the
actual speed has fallen below the speed set with Zero
Speed Lev (5.15). Then the current and the speed
controller will be blocked.
If Start Mode (2.09) = Flying Start is set and the RUN
command is output again during stopping the drive
will accelerate again, irrespective of the selected Stop
Mode (2.03).
If Start Mode (2.09) = Flying Start is set and the drive
is switched off with the ON command (RUN=1) only
switching the drive on will require only the rising edge
of the ON command. If the drive has not yet come to
a standstill, the drive will accelerate from the actual
speed.
The pulses are blocked with the falling edge of the ON
command, 200 ms will pass, the main contactor, the
fans and the field supply will be switched off and
hence the drive will be disconnected from the mains.
This command is also effective when the drive is
running, braking or has already come to a standstill.
The falling edge of the Eme Stop command generates
the warning Eme Stop Pending (A09). At the same
time the drive is braking on the ramp set with Eme
Stop Ramp (5.11) until the actual speed has fallen
below the speed set with Zero Speed Lev (5.15)
(minimum speed). Current and speed controllers are
blocked, the main contactor, the fans and the field
supply are switched off and thereby the drive is
disconnected from the mains.
Neither the ON nor the RUN command is effective in
this phase. Only upon reaching the minimum speed,
can the drive be restarted with the rising edge of the
ON and the RUN command.
Switching off behaviour at emergency stop
Eme Mode Stop (2.04) allows the selection of other
switching off modes than those provided by the default setting.
If Eme Stop Mode (2.04) = Torque Lim is set the
internal speed reference value is set to 0 rpm and the
drive will brake along the torque or current limit via the
speed controller. this requires the balancing of the
speed controller before braking. The pulses are
blocked, the main contactor, the fans and the field
supply are switched off and thereby the drive is
disconnected from the mains after the minimum speed
has been reached.
II K 4-24
Page 49

Overview of Software
Neither the ON nor the RUN command is active in this
phase. Only upon reaching the minimum speed, can
the drive be restarted with the rising edges of the ON
and the RUN command.
If Eme Stop Mode (2.04) = Coast is set the pulses will
be blocked, the main contactor, the fans and the field
input will be switched off and thereby the drive will be
disconnected from the mains. The drive is coasting
without control.
Neither the ON nor the RUN command is effective in
this phase. Only upon reaching the minimum speed,
can the drive be restarted with the rising edges of the
ON and the RUN command.
Special cases
When the stop command (RUN = 0) is present the
drive may change to the following events of higher
priority which may occur: Comm Fault Mode (2.07) or
Eme Stop Mode (2.04) with Eme Stop Mode being
able to interrupt Comm Fault Mode.
While the drive is being stopped in accordance with
Comm Fault Mode (2.07) or Eme Stop Mode (2.04),
an Off command (ON = 0) is prevented and vice
versa.
Coasting via field bus communication
The coast bit (COAST) in the control word allows the
drive to be de-energized as quickly as possible. The
falling edge blocks the pulses, switches off the main
contactor, the fans and the field supply and thereby
disconnects the drive from the mains. The drive is
coasting without control. The coast command
(COAST) is executed internally with the highest priority and has the same effect as emergency stop if Eme
Stop Mode (2.04) = Coast is set.
6ZLWFKGULYH21
'&6
VZLWFK21VHTXHQFH
Electronics is switched on
(no Faults, no Alarms)
Ready for ON command
5G\IRU2Q
Switch ON/OFF to ON
212)) !
Switch Fan ON
)DQ2Q
Switch Main Contactor ON
0DLQ&RQW2Q
Synchronization
ok ?
Mains supply
within 10 sec
ok ?
Field current
ok ?
Ready for Run signal
5HDG\IRU5XQ
212))
green Panel LED lights
no
Mains Undervoltage
no
Mains Overvoltage
Field Undercurrent
no
sequence for operation by:
- Digital Inputs
- Operating panel DCS 400PAN
- PC Tool Drive Window Light
- Fieldbus
Main Sync Fault
)DXOW
)DXOW
)DXOW
)DXOW
Neither the ON nor the RUN command is effective in
this phase. Only upon reaching the minimum speed,
can the drive be restarted with the rising edges of the
ON and the RUN command.
Field heating
The field heating starts 10 s after ON command
(without RUN command). The field heating will switch
on automatically 10 s after the drive is stopped (RUN=0)
and the actual speed is lower than Zero Speed Lev
(5.15). When the drive starts again (RUN=1) the drive
will switch over to nominal field current.
10sec
ON
Field current
Fan On
RUN
Zero Speed
Programmable Fan Delay (2.13)
10sec
)LHOGKHDWLQJ
Drive is now ready
for Run command
5HOHDVHGULYH
'ULYHLVUHOHDVHG
Fig. 4.4/1: Switch-on sequence of DCS 400
Switch RUN to on
581 !
Release the controller
(Current / Speed / ...)
Running signal
5XQQLQJ
Drive is in operation
II K 4-25
Page 50

6WRSWKHFXUUHQWFRQWUROOHU
'&6
VZLWFK2))VHTXHQFH
Switch off the drive via
and
6723
STOP command
581
2))
1 ==> 0
command
Overview of Software
Minimal circuitry for the drive logic
All digital inputs of the drive logic are edge-sensitive,
i.e. the function concerned will be executed only if
there is a signal change from 0ÿé 1 or 1
ÿéÿ
0.
5DPS7RU TXH /LP&RDVW
Brake via Ramp until
6SHHG
6ZLWFKWKHGULYH2))
6ZLWFKWKHGULYH2))
during RUN command is still on:
=HUR
= 1
'ULYHLV2))
Stop Mode
Brake at Torque Limitation
until
=HUR6SHHG
Stop the current controller
alpha = 150° el (inverter stability limit)
2))
ON/OFF 1 ==> 0
Delay time
(until arm. current = 0)
Open the main contactor
0DLQ&RQW2Q
Switch off fan
)DQ2Q
Switch off the drive via
2))
= 1
command
= 0
= 0
command
Drive is controlled using two commands (On and Run
separated)
On
Run
Reset
Eme Stop
+24V
Speed Ref
Recommended circuitry
On and Run can be controlled edge-sensitively. Stop
Mode (2.03) and Eme Stop
Mode (2.04) can be used.
Drive is controlled using one command (On and Run
jointly)
On
Run
Reset
Eme Stop
+24V
Speed Ref
Possible circuitry
On and Run can be controlled edge-sensitively.
Stop Mode (2.03) and Eme
Stop Mode (2.04) cannot be
used, however.
Switch
ON/OFF 1 ==> 0 (RUN = 1)
Stop the current controller
'ULYHLV2))
Fig. 4.4/2: Switch-off sequence of DCS 400
212))
(alpha = 150° el)
Delay time
(until arm. current = 0)
Open the main contactor
0DLQ&RQW2Q
Switch off fan
= 0
)DQ2Q
to off
= 0
If drive trips in case of
during operation
)DXOWV
You want the drive to be switched on automatically
after the electronics supply has been switched on.
On
Run
Reset
Eme Stop
+24V
Speed Ref
On
Run
Reset
Eme Stop
+24V
Ready for On
Speed Ref
1. Not possible
Since no edge-sensitive signals can be generated. The
drive will not start up even
after the electronics supply
has been switched on.
2. Possible circuitry
Since the requisite edges can
be generated by means of a
Rdy On signal when the electronics supply is switched on
or after a reset following a
fault. Stop Mode (2.03) and
Eme Stop Mode (2.04) can-
not be used, however.
Danger:
Acknowledgement of faults
occurring will switch on the
drive directly.
II K 4-26
Page 51

4.5 Regulator functions
y
Overview of Software
Software functions are described in the context of the
individual parameters (see parameter list). Special
functions which require an comprehensive parameterization or no parameterization and the service
procedures are described below.
4.5.1 Monitoring the Mains Voltage and Auto
Reclosing
The DCS 400’s mains voltage monitoring feature has
been implemented in a new, and hitherto unusual
manner. It permits simple parameterisation, and assures dependable operation.
Usually, with digital power converters, parameter
values are entered for mains voltage and tolerance
thresholds. This is not the case with the DCS 400,
whose power section can be operated on a mains
supply voltage of 230V…500V without any further
parameter settings.
There is a physical correlation between the motor
voltage and the requisite mains voltage, and between
the specified mains voltage and the resultant maximum motor voltage.
While for drives operating purely in motoring mode,
this causal relationship is non-critical, except that if
the mains voltage fluctuates the motor’s output and
speed will also fluctuate, in the case of drives operating in regenerative mode reliable operation is assured only as long as the mains voltage is stable and
remains in the correct ratio to the motor voltage.
The advantages of this principle are that
• The lower the motor voltage is in relation to the
mains voltage, the greater are the permissible
mains voltage fluctuations. “Soft” networks cause
fewer disturbances in the drive.
• Drives operating in regenerative mode are better
protected against shoot-through. This means that
fuse tripping and thyristor destruction are largely
prevented.
• the appropriate mains undervoltage detection function is selected and activated by the automatic
detection feature of a 2Q/4Q drive.
• no parameter setting for the mains voltage is
required.
• it is impossible to make a parameter setting for
unsafe operation.
• the drive thus remains simple and safe.
On the basis of the computed minimum permissible
mains voltage, the tripping threshold for the mains
undervoltage detection function can be varied within
appropriate limits using parameter Net Underv Trip
(1.10). Positive parameter values increase the safe-
ty reserve to this computed minimum voltage, but
reduce the tolerance distance to the line voltage, and
thus permit smaller mains voltage fluctuations; neg-
ative values reduce the safety reserve, but increase
the tolerance distance.
The factory setting for this parameter is 0 %. This
ensures dependable operation in the regenerative
range. Negative values are limited to a maximum of
-10 %; values beyond this cannot be set.
The minimum permissible mains voltage is comput-
ed from the Armature Voltage Nominal (1.02) (Ua)
parameter. If the voltage drops below this computed
level, a controlled drive shutdown will be executed,
followed by the error message F09-MainsUndervolt-
age.
The lowest still-permissible mains voltage is:
U
4Q: U
2Q: U
Example for a 4-Q drive:
Uarm (1.02)
= 420V
Unet
(1.07) = 400V
Unet
= 359V
(computed)
³ Ua / (1.35 x cos a)
mains min
³ Ua / (1.35 x 0.866) cos a = 30° = 0.866
mains min
³ Ua / (1.35 x 0.966) cos a = 15° = 0.966
mains min
act
acc. to 4Q formula
min = Uarm / (1,35 x 0,866)
Unet
Unet
min = 359V
min
F09-Mains Undervoltage
min
Unet
= F09Trip Level
The crucial factor behind this negative limitation is
that the motor’s EMF in regenerative mode is the
critical voltage, and not the armature voltage. Armature voltage and EMF are motor-specific, and may
diverge from each other in this order of magnitude.
Negative entries in this parameter may, however,
endanger the drive’s safety, if they do not coincide
with the motor’s EMF-specific data! It remains at the
user’s discretion whether this parameter is to be
altered.
Fault trip threshold:
Uarm (1.02)
= 420V
Unet
(1.07) = 400V
Unet
= 359V
323V
F09
act
min
= Unet
Trip Level
Trip Level = Unet min+ Net Underv Trip (1.10)
F09
F09-Mains Undervoltage
+ Net Underv Trip (1.10)
min
Tolerance distance
reserve
Safet
+ %
(1.10) = 0%
-10% (max)
II K 4-27
Page 52

Overview of Software
5% above this tripping threshold, an alarm signal
A02-Mains Voltage Low will be generated. The
alarm range shifts when the Net Underv Trip (1.10)
parameter is altered.
The alarm does not impair the drive in terms of its
function.
This message indicates that
• in regenerative mode for decelerating in the ma-
chine's rated operating point, the ratio between
minas voltage and motor voltage is approaching
the critical range (1...5 % before disconnection on
fault). In the alarm range, however, deceleration
mode is still possible and permissible. If the mains
voltage continues to fall, a disconnection on fault
must be anticipated, since otherwise there will be
a risk of shoot-through.
• in motoring mode, the ration between mains
voltage and motor voltage has dropped into the
alarm range, and a disconnection on fault is imminent. In the alarm range, however, the drive's
function is still assured. Any further drop in the
mains voltage will trigger a disconnection on fault.
Alarm trip threshold:
A02
Uarm (1.02)
= 420V
Unet
(1.07) = 400V
Level
A02
= 377V
Unet
= 359V
= F09
Level
act
A02
Level = F09 Trip Level + 5% (fix)
A02-Mains Voltage Low
min
F09
F09-Mains Undervoltage
+ 5% (fix)
Trip Level
Alarm range
Trip Level = Unet min + Net Underv Trip (1.10)
(1.10) = 0%
Monitoring the Mains Voltage:
e.g. Mains Supply Voltage = 400 V
Application = 4-Q
Armature Voltage Nominal = 420 V
… with default settings:
Net Underv Trip (1.10) = 0%
Uarm (1.02)
= 420V
act (1.07)
Unet
= 400V
A02
= 377V
Unet
= 359V
= F09
Level
acc. to formula
min = Uarm / (1,35 x cos
Unet
= 359V
Unet
min
A02-Mains Voltage Low
(5% (fix) above Unet
min
if Net Underv Trip (1.10) = 0% (default)
Trip
then 359V (Unet min) is the trip level for F09.
For right operation Unet
than 359V.
min
act
)
α
)
has to be gre ater
permitted
operating range
F09-Mains
Undervoltage
Fault and Alarm Level for specified motor voltage
(UDC) with:
Net Underv Trip (1.10) = 0%
2-Q - application
U
(V)
230
380
400
415
440
460
480
500
F09-Fault
net
level
A02-Alarm
U
level
(V)
(V)
(V)
207 217 270
353 370 460
360 378 470
376 395 490
399 419 520
414 435 540
437 459 570
460 483 600
DC
U
DC max
(V)
285
471
496
514
545
570
595
619
II K 4-28
4-Q - application
U
U
(V)
230
380
400
415
440
460
480
500
DCmax
net
= (U
F09-Fault
level
net
A02-Alarm
level
(V)
(V)
205 216 240
342 359 400
359 377 420
368 386 430
393 413 460
411 431 480
428 449 500
445 467 520
*1.35 * cos a) - 5% Alarm level
(Mains voltage deviation is not considered.)
U
(V)
DC
U
DC max
(V)
255
422
444
461
489
511
533
555
Page 53

Overview of Software
t
Monitoring the Mains Voltage:
e.g. Mains Supply Voltage = 400 V
Application = 4-Q
Armature Voltage Nominal = 420 V
… with maximum negative settings:
Net Underv Trip (1.10) = -10%
Uarm (1.02)
= 420V
ac
Unet
(1.07) = 400V
Level
A02
= 339V
Unet
= 323V
= F09
min
Trip
acc. to formula
min
‘ = Uarm / (1,35 x cos α)
Unet
Unet
min‘ = 359V
Set Net Underv Trip (1.10) = -10%
359V
then 323V (Unet
for F09.
For right operation Unet
be greater than 323V.
F09-Mains Undervoltage
min
) is the trip level
act
has to
A02-Mains Voltage Low
(5% (fix) above Unet
permitted
operating
range
for Unet
min)
Fault and Alarm Level for specified motor voltage
(UDC) with
Net Underv Trip (1.10) = -10%
Auto Reclosing
In parameter Net Fail Time (1.11) the maximum
tolerated mains voltage failure time is set. In case of
mains undervoltage the drive is blocked and alarm
A02 is displayed during this time. If during this time the
mains voltage returns to a voltage level higher than
the trigger level the drive restarts automatically. After
this time elapsed and the mains voltage did not return
to a voltage level higher than the trigger level the drive
stops operation and fault F09 is displayed. Auto
Reclosing is not possible in this case.
Auto Reclosing is prevented if Net Fail Time = 0,0sec
is set. In this case the drive will always stop operation
with fault message F09 displayed if mains undervoltage occurs.
4.5.2 Monitoring the Actual Speed Value
The speed feedback via tacho-generator or encoder
is monitored. If the deviation between the speed
calculated from the EMF and the speed feedback is
too big the drive will be switched off with a fault
message Speed Meas Fault (F16).
Fault conditions:
EMF Act > 50% nominal EMF and
Tacho Speed Act < 12.5% Base Speed (1.05)
U
(V)
230
380
400
415
440
460
480
500
U
(V)
230
380
400
415
440
460
480
500
2-Q - application
F09-Fault
net
level
A02-Alarm
U
level
(V)
(V)
(V)
186 196 270
317 333 460
324 341 470
338 355 490
359 377 520
373 391 540
393 413 570
414 435 600
DC
U
DC max
(V)
285
471
496
514
545
570
595
619
4-Q - application
F09-Fault
net
level
A02-Alarm
U
level
(V)
(V)
(V)
185 194 240
308 323 400
323 339 420
331 348 430
354 372 460
370 388 480
385 404 500
400 420 520
DC
U
DC max
(V)
255
422
444
461
489
511
533
555
U
DCmax
= (U
*1.35 * cos a) - 5% Alarm level
net
(Mains voltage deviation is not considered.)
II K 4-29
Page 54

Overview of Software
(
)
(V)n (
)
(V)n (
)
g
(
)
4.5.3 Automatic field weakening
Correlation of Armature Voltage and EMF
The DCS 400 drive calculates the true EMF and does
not take the Armature Voltage instead. EMF is
calculated by
EMF
= Arm Volt
NOM
- (Arm Cur
NOM
x Arm Resistance)
NOM
The Armature Resistance is measured during armature autotuning or can be entered manually. This
means, without load and thus without current you
will never get to full rated Armature Voltage but always
full speed.
Example:
Motor name plate
Armature Voltage (Ua) nominal: 440 V
Armature Current (Ia) nominal: 217 A
Field Voltagel (Uf) nominal: 220 V
Field Current (If) nominal: 4.6 A
Speed (n) nominal: 2250 rpm
Parameter settings
Arm Volt Nom (1.02): 440 V
Arm Cur Nom (1.01): 217 A
Field Volt Nom (1.04): 220 V
Field Cur Nom (1.03): 4.6 A
Base Speed (1.05): 2250 rpm
Max Speed (1.06): 2250 rpm
Armature Resistance (3.13) (Ra)
determined by Arm Autotuning: 230 mW
U
440 V
1.02
390 V
Ua
full load
no load
act (3.03)
EMF
act (3.20)
2250
Ia x Ra
Deviation of
depends on
load condition
rpm
Ua
Calculated EMF:
EMF
EMF
= Ua
NOM
= 440 V - [217 A x 0,23 W]
(1.02) - (Ia
NOM
(1.01) x Ra (3.13))
NOM
= 440 V - 50V
= 390 V
NOM
Ua actual
Under full load condition, at full speed:
Ua
Ua
EMF
actual (3.03)
actual (3.03)
actual (3.20)
= EMF
= 390V + (217 A x 0,23 W)
actual (3.20)
+ (Ia
actual (3.02)
xRa
(3.13)
= 440 V
= 390 V
)
Under no load condition, at full speed:
Ua
Ua
actual (3.03)
actual (3.03)
= EMF
= 390 V + (»0 A x 0,23 W)
= EMF
actual (3.20)
actual (3.20)
+ (Ia
actual (3.02)
= 390 V
x Ra
(3.13)
)
Because of the EMF based controller the drive uses
Automatic Field Weakening as soon as the nominal EMF is reached to achieve full speed. But that’s
only possible in tacho or encoder controlled mode, in
EMF feedback there is no field weakening.
Example:
Motor name plate
Armature Voltage (Ua) nominal 440 V
Armature Current (Ia) nominal 217 A
Field Voltagel (Uf) nomina 220 V
Field Current (If) nominal 4.6 A
Speed (n) nominal 2250 rpm
Parameter settings
Arm Volt Nom (1.02):
яяяяяяяяяяяяяяяяй
420 V !
Arm Cur Nom (1.01): 217 A
Field Volt Nom (1.04): 220 V
Field Cur Nom (1.03): 4.6 A
Base Speed (1.05): 2250 rpm
Max Speed (1.06): 2250 rpm
Armature Resistance (3.13) (Ra)
determined by Arm Autotuning: 230 mW
U
440 V
420 V
1.02
370 V
motor name plate
parameter settin
act
(3.03)
Ua
100% EMF
s
Ia x Ra
Deviation of
depends on
load condition
Ua
act
EMF
(3.20)
100% EMF reached.
Start of Automatic
Field Weakening.
2250
2150
Base Speed (1.05)
Max Speed (1.06)
rpm
II K 4-30
Page 55

Overview of Software
Without speed-dependent current limiting
The field weakening mode is selected or not selected
as a function of the parameter values Base Speed
(1.05) and Max Speed (1.06):
no field weakening:
If the contents of Base Speed (1.05) is identical
with Max Speed (1.06)
field weakening:
If the contents of Base Speed (1.05) is smaller
than Max Speed (1.05)
In the case of manual parameterization and no field
weakening set both parameters to identical values.
With field weakening: set the Base Speed to the
nominal speed at nominal armature voltage and Max
Speed to the maximum speed at maximum field
weakening. If you parameterize the converter with
the prompted start-up procedure (Panel Wizard) the
parameters will be interrogated during entry and will
be set appropriately.
Field weakening is possible only with a tacho-generator or encoder feedback. If the EMF feedback is
used the motor can be run only up to the nominal
speed Base Speed (1.05). Higher reference values
will not cause any increase in speed, there will be no
field weakening.
With speed-dependent current limiting
Beyond the normal field weakening range, the armature current of a motor must be reduced because of
the commutation problems to be expected. This speed
is the maximum electrical speed of a motor. Set the
parameter Cur Lim Speed (1.12) to the speed, from
which the limitation shall be effective, for this speed
dependent current limiting. Within the speed range
between Cur Lim Speed (1.12) and Max Speed (1.06)
the permissible armature current Cur Arm Max (3.04)
is reduced to Ia
the following formula:
= Arm Cur Max * (Cur Lim Speed / Speed Act)
Ia
Lim
as a function of speed according to
Lim
4.5.4 Overtemperature Protection
Converter:
DCS400 is equipped with an overtemperature protection on the heat sinks of the thyristors. When the
maximum bridge temperature is reached DCS400
switches off with the fault message Converter Overtemp (F7). The converter can be switched on again
only after sufficient cooling and acknowledgement of
the fault. 5 °C below the cut-out temperature the
warning Converter High Temp (A4) is output but the
drive is not switched off.
In case of overheating the Fan On signal will be active
(fan coasting) until the converter has cooled down.
The signal can be evaluated by means of the digital
outputs DO1…DO5.
Motor:
The temperature protection of the motor can be
evaluated via a PTC element (usually in the field or
commutating winding of the motor) in the DCS400.
For this purpose the PTC element shall be connected
to the AI2 analog input. The response of the DCS400
when the temperature monitor trips is set with the
parameter PTC Mode (2.12).
The tripping of the temperature monitor of the motor
has the same effect on the Fan ON signal as the
converter temperature monitor: The signal remains
present until the motor temperature has decreased
sufficiently.
PTC connection diagram:
PTC
X2:3
S1:
56
22 K
-
+
4
5
+10V
GND
AI2
100k
100k
1n
100k 100k
1n
speed dependent
P
Base
Speed
(1.05) (1.06)(1.12)
current limiting
I
effective
aLim
Cur Lim
Speed
Max
Speed
n
II K 4-31
Page 56

Overview of Software
4.5.5 Armature current controller
The Arm Cur Nom (1.01), Arm Cur Max (3.04),
Torque Lim Pos (3.07) and Torque Lim Neg (3.08)
parameters are the ones relevant to the current limitation functions. Arm Cur Nom (1.01) scales the
power converter to motor rated current. All other
current-dependent parameters are referenced to this
parameter. Arm Cur Max (3.04) limits the current
controller absolutely. Torque Lim Pos (3.07) and
Torque Lim Neg (3.08) limit the reference value
span.
For the self-optimisation function, only the Arm Cur
Nom (1.01) is relevant. The current controller is
always optimised to 100 %, since the system will more
usually be running in the machine's operating point
than in overload. If you want to optimise to overload,
then the Arm Cur Nom (1.01) must be temporarily set
to overload, then optimized, and subsequently reset
again.
Example of an overload parameterization routine
by means of fixed parameter settings:
e.g.
Motor nominal current = 170 A
Overload = 150%
Speed reference = analogue input AI1
Parameters affected
Arm Cur Nom (1.01) = 170 A
Arm Cur Max (3.04) = 150%
Overload Time (3.05) = 60 s (*)
Recovery Time (3.06) = 900 s (*)
Torque Lim Pos (3.07) = 150%
Torque Lim Neg (3.08) = -150%
Cur Contr Mode (3.14) = Speed Contr resp. Mac-
ro depend é Overload
fix
Speed Ref Sel (5.01) = AI1 resp. Macro depend
(*) The particulars given here for Overload Time and
Recovery Time are to be construed as examples only.
The actual figures will depend on the overload withstand capabilities of the drive components (motor and
power converter), and must be covered by the planning work.
Second current limitation
The motor’s maximum armature current is limited by
the Arm Cur Max (3.04) parameter. This absolute
limitation is always active. Under this, a second
current limitation function, Arm Cur Lim 2 (3.24),
switched on and off by a binary signal, can be activated in the Curr Lim 2 Inv (9.17) parameter. This
means it is possible to switch back and forth digitally
between these two limitation functions. The digital
inputs DI1 to DI4 are available as binary signals. With
serial communication, this limitation function can also
be switched over using Bits 11 to 15 of the Main
Control Word.
If the second current limitation function has been
activated in parameter group 9 - Macro Adaptation,
the value of the Arm Cur Max (3.04) parameter must
be greater than the value of Arm Cur Lim 2 (3.24). In
addition, the Torque Lim Pos (3.07) and Torque Lim
Neg (3.08) parameters must to set in accordance with
Arm Cur Max (3.04).
The Arm Cur Max (3.04) parameter limits the current
to the maximum permissible armature current. This
limitation function is always active, even when the
second current limitation function has not been parameterised, Curr Lim 2 Inv (9.17) = Macro depend
or Disable or Arm Cur Lim 2 (3.24) is greater than the
value of Arm Cur Max (3.04).
Armature Current Limitati on
Torque Limitation
Second Current
Torque Lim Pos
150%
(3.07)
Torque Lim Neg
-150%
(3.08)
Bin. signal:
DI1 … DI4
MCW Bit 11 … 15
0 =
$UP&XU/LP
$UP&XU0D[
1 =
active
active
Limitation
120%
Curr Lim 2 Inv (9.17)
Parameter group 9
0DFUR$GDSWDWLRQ
Arm Cur Lim 2
(3.24)
150%
Arm Cur Max
(3.04)
II K 4-32
Page 57

Armature current controller operating modes
The speed of a DC motor is altered with the armature
voltage. The range up to the point where the rated
armature voltage is reached is referred to as the
armature operating range. To enable the motor’s
speed to be increased above these rated armature
voltage, the field’s magnetic flux has to be reduced.
This is done by reducing the field current. This operating range is referred to as the field weakening
range. The behavior of the current controller in these
operating ranges is depend on current controller
operating mode.
Speed Ref
+/-10V
ext. Tor que
Limita tion
+/-10V
AI1
AI2
5.01
5.26
Ramp
Generator
effective as Torque or Current
reference, depends on
Cur Ctrl M ode (3.14)
Speed
Controller
MIN
Overview of Software
&XU&WUO0RGH
Macro depend
Speed Contr
Torque Contr
Cur Contr
+
Σ
Speed+Torque
Lim Sp Ctr
Lim Trq Ctr
Cur Ctrl Mode (3.14)
0 = Macro depend
The operation mode is defined by macro, see
chapter 4.1 Overview of factory settings of macrodepent parameters.
Macro 1…7 are speed controlled, ref. to 1
Macro 8 is torque controlled, ref. to 2
1 = Speed Contr
Drive is speed controlled.
Always selects the output of the speed controller
as the torque reference in consideration of the flux.
During this mode current or torque limitaions are
effective as defined by parameter. Stop and Emer-
gency Stop are working as defined by parameter
Stop Mode (2.03) and Eme Stop Mode (2.04).
2 = Torque Contr
Drive is torque controlled.
Use the reference selected in Torque Ref Sel
(3.15) as the torque reference in consideration of
the flux. During this mode current or torque limitaions are effective as defined by parameter. Stop
and Emergency Stop switchs the drive over to
speed controlled and works as defined by parameter Stop Mode (2.03) and Eme Stop Mode
(2.04).
3 = Cur Contr
Drive is current controlled.
Use the reference selected in Torque Ref Sel
(3.15) as the current reference disregarding the
flux. During this mode current or torque limitaions
are effective as defined by parameter. Stop and
Emergency Stop switchs the drive over to speed
controlled and works as defined by parameter
Stop Mode (2.03) and Eme Stop Mode (2.04).
4 = Speed + Torque („+“)
In this mode the speed controller output and the
reference selected in Torque Ref Sel (3.15) are
added. During this mode current or torque limitaions are effective as defined by parameter. Stop
and Emergency Stop switchs the drive over to
speed controlled and works as defined by parameter Stop Mode (2.03) and Eme Stop Mode
(2.04).
5 = Lim Sp Ctr („MIN“)
Limited Speed Control. Drive is speed controlled
with external torque limitation.
Use the reference selected in Torque Ref Sel
(3.15) for limiting the torque in speed control mode.
During this mode current or torque limitaions are
effective as defined by parameter. Stop and Emer-
gency Stop switchs the drive over to speed controlled and works as defined by parameter Stop
Mode (2.03) and Eme Stop Mode (2.04).
6 = Lim Trq Ctr („S“)
Limited Torque Control. Drive is torque controlled
as long as the speed deviation remains within the
window. Flying alternation between speed and
torque control depend on speed deviation. Use the
reference selected in Torque Ref Sel (3.15) as the
torque reference. During this mode current or
torque limitaions are effective as defined by parameter. Stop and Emergency Stop switchs the
drive over to speed controlled and works as defined by parameter Stop Mode (2.03) and Eme
Stop Mode (2.04).
II K 4-33
Page 58

Overview of Software
1 = Speed Contr / 2 = Torque Contr
Depending on the application involved, however, a
constant torque is also required in the field weakening
range (Torque-Controlled Mode (3.14) = Torque
Contr). For this purpose, the armature current has to
be increased in this range, in order to compensate for
the reduced field flux. This can be done only if the
parameterisation permits a current increase, i.e. the
current limit of Parameter Arm Cur Max (3.02) is not
reached.
If the current limitation level is greater than rated
armature current (Arm Cur Max (3.02) > 100 %) then
power converter and motor have to have been dimensioned for this overload mode.
This procedure is also employed in speed-control-
led drives.
6SHHG&RQWUROOHG7RUTXH&RQWUROOHG
armature cont rol range field weakening range
Base Speed
(1.05)
Torque Act (3.23)
Armature Current
(1.01 / …Max 3.04 / …Act 3.02)
Power Act (3.2 1)
Armature Voltage
(1.02 / …Act 3.03)
Field Current
(1.03 / …Act 4.02)
n
Max Speed
(1.06)
3 = Cur Contr
In a current-controlled mode (Cur Contr Mode
(3.14) = Cur Contr), the system is controlled inde-
pendently of the speed in terms of the current reference value. The motor’s torque, however, decreases
in the field weakening range in proportion to the speed
increase 1/n.
&XUUHQW&RQWUROOHG
armature control range field weakening range
Armature Current
(1.01 / …Act 3.02)
4 = Speed + Torque
Depend on application in speed control mode a precontrol of torque is required to have the drive more
dynamic. The torque reference is selected in Torque
Ref Sel (3.15). Torque references coming from
speed controller output and from reference select-
ed in Torque Ref Sel (3.15) are added.
5 = Lim Sp Ctr („MIN“)
Speed control with external torque limitation.
Example of an overload parameterization routine
by means of external torque limitation.
e.g.
Motor nominal current = 170 A
Overload = 200%
Speed reference = analogue input AI1
External Torque Limit. = analogue input AI2
Parameters affected
Arm Cur Nom (1.01) = 170 A
Arm Cur Max (3.04) = 200%
Overload Time (3.05) = 60 s (*)
Recovery Time (3.06) = 900 s (*)
Torque Lim Pos (3.07) = 200%
Torque Lim Neg (3.08) = -200%
Cur Contr Mode (3.14) = Lim Sp Ctr
é
external limitation
Torque Ref Sel (3.15) = AI2 or Macro depend
é
variable limitation
Speed Ref Sel (5.01) = AI1 or Macro depend
AI2 Scale 100% (6.03) = 5.00 V (10 V = 200%)
Overload variable
settable between
0…200 % (0…10 V)
(*) The particulars given here for Overload Time and
Recovery Time are to be construed as examples only.
The actual figures will depend on the overload withstand capabilities of the drive components (motor and
power converter), and must be covered by the planning work.
II K 4-34
Base Speed
(1.05)
Torque Act (3 .23)
Power Act (3 .21)
Armature Voltage
(1.02 / …Act 3.03)
Field Current
(1.03 / …Act 4.02)
n
Max Speed
(1.06)
Page 59

Overview of Software
6 = Lim Trq Ctr (Window Control Mode)
The idea of Window Control Mode is to deactivate the
speed control as long as the speed deviation remains
within the window. This allows the torque reference to
affect the process directly.
In master / follower drives, where the follower section
is torque controlled, the window control is used to
keep the speed deviation of the section under control.
If the speed deviation (window) is greater than ±50 rpm
the follower changeover to speed control mode and
brings the speed difference back to the window.
The window control is activated by setting Cur Contr
Mode (3.14) = Lim Trq Ctr.
speed contr olled
speed
reference
speed actual
permitted speed deviation between speed
reference and speed actual is +/- 50 rpm
torque c ontrolled
speed contr olled
I2t function
The DCS400 is equiped with an I
2
t-protection for the
motor, which can be enabled if required. Parameter
Arm Cur Nom (1.01) is the 100% value for the
current. All current depending values are related to
this parameter.
2
t-function is enabled if the parameters Over-
The I
load Time (3.05) and Recovery Time (3.06) are set
to a value higher than 0 seconds and the overcurrent
in parameter Arm Cur Max (3.04) is set to a value
higher than the Arm Cur Nom (1.01).
The function is disabled if the parameter Overload
Time (3.05) = 0 s, or Recovery Time = 0 s, or Arm
Cur Max (3.04) = Arm Cur Nom (1.01).
If the recovery time is set to a value too low compared
to the overload time, the alarm message Par Setting
Conflict (A16) "Recovery Time to low" is generated.
In addition to the overcurrent parameters the reference limititations Torque Lim Pos (3.07) and Torque
Lim Neg (3.08) have to be set.
It has to be ensured that the parameterized overload
times correspond to the overload capability of motor
and drive. This has already to be taken into account
during the selection process of the drive system.
Ia (%)
(3.04)
(1.01)
overload phase
Ia > 100%
(3.05)
A6
Arm Cur redu ced
Recovery phase Ia < 100%
(3.06)
Ia
max
Ia
=100%
nom
Ia
red
Integral
Limit
t
II K 4-35
Page 60

Overview of Software
The overload phase is set using parameters Arm Cur
Max (3.04) and Overload Time (3.05). The recovery
phase is set using parameter Recovery Time (3.06).
In order not to overload the Motor, the I2t-plane of the
two phases have to be identical:
overload phase = recovery phase
2
(Ia
max
2
- Ia
) x overload time = (Ia
nom
nom
2
- Ia
red
2
) x recovery time
In this case it is ensured that the mean value of the
armature current does not exceed 100%. To calculate
the recovery current the formula is rewritten:
2
IaIa
nomred
time overload
time recovery
max
2
2
)Ia(Ia*
−−=
nom
After the overload phase the armature current is
automatically reduced / limited to Ia
recovery phase. The current reduction during the
during the
red
recovery phase is signaled using alarm message
Arm Current Reduced (A6). This message is also
available at the digital outputs.
Shorter overload phases result in higher recovery
currents.
4.5.6 Stall Protection
The stall protection of the motor can be activated with
the Stall Time (3.18) parameter. If the value of this
parameter is 0.0s the stall protection is switched off.
A time >0.0 s switches the stall protection on. The
following conditions must be fulfilled to trip the monitor:
The actual speed value is smaller than the value in
Zero Speed Lev (5.15) and the actual torque value is
bigger than the value in Stall Torque (3.17) for a time
longer than the value in Stall Time (3.18).
Speed
< 5.15
Torque
Time > 3.18
act
act
> 3.17
motor stalled
(F19)
4.5.7 Flux Adaptation
4.5.8 Alternative Parameters for the Speed
Controller
A second parameter set is available for the speed
controller (Alternative Parameters), which can be
activated through events. The speed controller parameters KP and TI and the parameters for the
accelerating and deccelerating ramps are switched
over. Depending on the speed actual value or the
speed deviation (difference between speed actual
and speed reference) the behaviour of the speed
controller can be influenced. In this way different
behaviour during acceleration and decceleration can
be parameterized easily.
3DUDPHWHUVHW
6SHHG5HJ.3
6SHHG5HJ7,
$FFHO5DPS
'HFHO5DPS
3DUDPHWHUVHW
$OW6SHHG.3
$OW6SHHG7,
$OW$FFHO5DPS
$OW'HFHO5DPS
Select switch over event for parameter set 2 in parameter
0 = disable
1 = enable
2 = makro depend
3 = Sp < Lev1
4 = Sp < Lev2
5 = Sp Err<Lev1
6 = Sp Err<Lev2
switch ing
depends on
Speed Lev 1/2
Alt Speed KP (5.22)
Alt Speed TI (5.23)
Alt Accel Ramp (5.24)
n
effective
Parameter set
Parameter set 2
depends on the selec ted macro
if Speed Actual < Speed Level 1 (5.16) parameter set 2 aktive
if Speed Actual < Speed Level 2 (5.17) parameter set 2 aktive
if Speed Error < Speed Level 1 (5.16) parameter set 2 aktive
if Speed Error < Speed Level 2 (5.17) parameter set 2 aktive
Speed Reg KP (5.07)
Speed Reg TI (5.08)
Accel Ramp (5.09)
effective
active
DOZD\V
activ e
DOZD\V
Speed Reg KP (5.07)
Speed Reg TI (5.08)
Decel Ramp (5.10)
Alt Speed KP (5.22)
Alt Speed TI (5.23)
Alt Decel Ramp (5.25)
effective
$OW3DU6HO
t
effective
:
to
Ramp generator
respectively
Speed controller
The flux characteristic of the field is not linear to the
increase in speed in the field weakening mode. Every
field has a characteristic of its own within certain
limits. This characteristic can be emulated by means
of the parameters Field Cur 40 % (4.07), Field Cur
70% (4.08) and Field Cur 90% (4.09). The characteristic can be determined automatically by means of a
service procedure in the parameter Contr Service
(7.02).
In the case of manual parameterization, make sure
that the parameter values are plausible i.e. the value
in the parameter Field Cur 40 % (4.07) must be set to
a value smaller than the value in Field Cur 70%
(4.08), its value in turn must be smaller than the value
in Field Cur 90% (4.09). Otherwise, the warning Par
Setting Conflict (A16) will be generated.
II K 4-36
Page 61

Overview of Software
4.5.9 Service Procedures, Contr Service (7.02)
Armature current controller
(Motor does not turn)
Autotuning
• On the panel press button LOC; LOC is displayed in the panel status row.
• Select parameter Contr Service (7.02) = Arm
Autotun and confirm with ENTER.
• Within the next 30 seconds press the (I) button
on the panel. This starts the autotuning procedure.
• Main contactor is switched On.
The autotuning procedure is successfully finished if
the panel displays the message None.
• Main contactor is switched Off.
After successful autotuning the following controller
parameters are set:
Arm Cur Reg KP (3.09)
Current controller proportional gain
Arm Cur Reg TI (3.10)
Current controller integral time constant
Cont Cur Lim (3.11)
Continuous current limit
Arm Inductance (3.12)
Armature motor inductance
Arm Resistance (3.13)
Armature motor resistance
If the autotuning procedure failed the alarm message
Autotuning Failed (A10) is displayed. Detailed infor-
mation for the failure reason can be read from parameter Diagnosis (7.03). More explanations to the diag-
nosis messages are available in the chapter Troubleshooting.
Pressing the LOC button on the panel again the
control is switched back to the input/output terminals.
The LOC message in the panel status row disappears.
Field current controller
(Motor does not turn)
Autotuning
• On the panel press button LOC; LOC is displayed in the panel status row.
• Select parameter Contr Service (7.02) = Fld
Autotun and confirm with ENTER.
• Within the next 30 seconds press the (I) button
on the panel. This starts the autotuning procedure.
• Main contactor is switched On.
The autotuning procedure is successfully finished if
the panel displays the message None.
• Main contactor is switched Off.
After successful autotuning the following controller
parameters are set:
Field Cur KP (4.03)
Field current controller proportional gain
Field Cur TI (4.04)
Field current controller integral time constant
EMF Reg KP (4.11)
EMF controller proportional gain
EMF Reg TI (4.12)
EMF controller integral time constant
If the autotuning procedure failed the alarm message
Autotuning Failed (A10) is displayed. Detailed infor-
mation for the failure reason can be read from parameter Diagnosis (7.03). More explanations to the diag-
nosis messages are available in the chapter Troubleshooting.
Pressing the LOC button on the panel again the
control is switched back to the input/output terminals.
The LOC message in the panel status row disappears.
Manual Tuning
(Motor does not turn)
Preparation:
• Set Commis Ref 1 (7.15) = 0
• Commis Ref 2 (7.16) = 4096.
• Set Squarewave Per (7.17) = 5s.
The output of the Squarewave Generator (7.18) switches between 0 and 4096. 4096 corresponds to the set
nominal field current (Field Cur Nom 1.03).
• Assign the actual current value (4.02) to analog
output AO1 Ass (6.05) or AO2 Ass (6.06) and
measure it or check the field current with a
current probe.
Activate tuning:
• Set parameter Contr Service (7.02) = Fld Man.
• Switch on and enable the drive via the terminal
block (ON=1, RUN=1) or switch on (I) the drive
with operating panel in the LOCAL mode.
• Main contactor is switched On.
• The field current is flowing, but there is no
armature current. The reference value of the field
current is now following the output limited to 0 to
4096 of the Squarewave Generator (7.18).
Tuning:
• Now set the field current controller with the
parameters Field Cur KP (4.03) and Field Cur TI
(4.04). The procedure can aborted by setting the
parameter Contr Services (7.02) = none or
switching the drive off (ON=0, RUN=0). In this
case, Contr Service (7.02) is reset automatically.
• Main contactor is switched Off.
II K 4-37
Page 62

Overview of Software
Speed controller
Attention: Motor will accelerate twice to 80% of
Base Speed now
Autotuning
• On the panel press button LOC; LOC is displayed in the panel status row.
• Select parameter Contr Service (7.02) = Sp
Autotun and confirm with ENTER.
• Within the next 30 seconds press the (I) button
on the panel. This starts the autotuning procedure.
• Main contactor is switched On and motor will
start turning.
The autotuning procedure is successfully finished if
the panel displays the message None.
• Main contactor is switched Off.
After successful autotuning the following controller
parameters are set:
Speed Reg KP (5.07)
Speed controller proportional gain
Speed Reg TI (5.08)
Speed controller integral time constant
If the autotuning procedure failed the alarm message
Autotuning Failed (A10) is displayed. Detailed infor-
mation for the failure reason can be read from parameter Diagnosis (7.03). More explanations to the diag-
nosis messages are available in the chapter Troubleshooting.
After successful autotuning the following controller
parameters are set:
Field Cur 40% (4.07)
Field current for 40% flux
Field Cur 70% (4.08)
Field current for 70% flux
Field Cur 90% (4.09)
Field current for 90% flux
If the autotuning procedure failed the alarm message
Autotuning Failed (A10) is displayed. Detailed infor-
mation for the failure reason can be read from parameter Diagnosis (7.03). More explanations to the diag-
nosis messages are available in the chapter Troubleshooting.
Pressing the LOC button on the panel again the
control is switched back to the input/output terminals.
The LOC message in the panel status row disappears.
Thyristor diagnosis
(Motor does not turn)
Self diagnosis
• On the panel press button LOC; LOC is displayed in the panel status row.
• Select parameter Contr Service (7.02) = Thyr
Diag and confirm with ENTER.
• Within the next 30 seconds press the (I) button
on the panel. This starts the self-diagnosis
procedure.
• Main contactor is switched On.
Pressing the LOC button on the panel again the
control is switched back to the input/output terminals.
The LOC message in the panel status row disappears.
Flux adaptation
Attention: Motor will accelerate to 50% of Base
Speed now
Autotuning
• On the panel press button LOC; LOC is displayed in the panel status row.
• Select parameter Contr Service (7.02) = Flux
Adapt and confirm with ENTER.
• Within the next 30 seconds press the (I) button
on the panel. This starts the autotuning procedure.
• Main contactor is switched On and motor will
start turning.
The autotuning procedure is successfully finished if
the panel displays the message None.
• Main contactor is switched Off.
II K 4-38
The thyristor diagnosis procedure is successfully
finished if the panel displays the message None. That
means no defective thyristor(s) were detected.
• Main contactor is switched Off.
If the diagnosis procedure failed the fault message
Hardware Fault (F02) is displayed. Detailed informa-
tion for the failure reason can be read from parameter
Diagnosis (7.03). More explanations to the diagnosis
messages are available in the chapter Troubleshooting.
Pressing the LOC button on the panel again the
control is switched back to the input/output terminals.
The LOC message in the panel status row disappears.
Page 63

Overview of Software
4.5.10 Internal Scaling
You can display all parameters of the DCS400 in their
physical quantities by means of operating panel or the
PC tool, in the way they are specified in the column
"Unit" at the parameter list:
A, V, rpm, Hz, %, s, ms, text, integer, mH, mOhm, %/
msec, °C, kW, hex.
In case of serial drive control (reference/actual value
transmission) with PLC (field bus coupling, RS232
port, panel port) the internal scaling of these values
shall be considered. There is no transmission of
physical quantities but values are transmitted in binary representation.
Example: The maximum speed reference of a drive of
3000 rpm is transmitted in a 16-bit telegram word. In
this case 3000 rpm are equal to the maximum value
of 20.000 decimal i.e. the resolution of the speed is in
steps of 1/20,000. This value 20,000 is transmitted on
the bus as a binary value in a 16-bit combination of "0"
and "1". Each bit has a decimal valency. Hence
20,000 shall be distributed over these 16 bits in such
a way that the decimal sum of set "1's" is again
20,000.
Representation of the decimal value 20,000 as 16-bit
pattern
This internal scaling does not apply to the transmission of parameters via PLC. In this kind of transmission, decimal values are simply transmitted in binary
form i.e. the values of the parameter list are represented in decimal form and without a decimal point in a 16bit word.
Decimal values without decimal point are transmitted
in the same form as they are represented in the
parameter list. In this case, e.g. the parameter Base
Speed (1.05) will be set to 3000 if the nominal speed
is intended to be 3000 rpm.
Decimal values with decimal point are simply transmitted as a number without decimal point but with all
decimal digits. In this case, e.g. the parameter Field
Cur Nom (1.03) will be set to 650 if the nominal field
current is intended to be 6.50 A. Parameters with
other engineering units shall be treated in the same
way.
Exception:
Selection parameters (unit: Text) have a number
preceding the text in the parameter list. Every number
represents a text and/or a function. Overwriting the
number changes the selection in the parameter. If a
such parameter is read the number will be transmitted, not the text.
line1 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1
line2 32768 16384 8192 4096 2048 1024 512 256 128 64 32 16 8 4 2 1
line3 0 1 00111000100000
Line 1 - positions of the 16 bits
Line 2 - decimal valency of each bit
Line 3 - bit combination of "0" and "1", whose checksum is 20,000
Incorrect parameter transmission
Writing parameters may cause the output of fault
messages if
• the values are outside of the min. / max.
definition (according to the parameter list)
• writing is on actual value parameters (signals)
or constants
• writing is on parameters which are blocked
Other values of the DCS400 are resolved with a
maximum value of 4096.
during operation
In such cases, a fault telegram will be generated
which must be evaluated in the PLC.
Table of internal scaling:
Signal Internal value Corresponds to value
(decimal) (on operating panel or PC tool)
Actual speed value (5.05) 20,000 100% speed in rpm
Speed reference value (5.04) 20,000 100% speed in rpm.
Armature voltage actual value (3.03) 4,096•(Ua/EMF) 100% nominal armature voltage in V
Armature current reference value (3.01) 4,096 100% nominal armature current in A
Armature current actual value (3.02) 4,096 100% nominal armature current in A
Actual power value (3.21) 4,096 100% power in %
Actual torque value (3.23) 4,096 100% torque in %
Actual field current value (4.02) 4,096 100% nominal field current in A
Actual EMF of motor (3.20) 4,096 100% nominal EMF in V
Default in service procedure Internal value Corresponds to value
Contr Service (7.02) (decimal)
Field current reference 4,096 100% of nominal field current in A
II K 4-39
Page 64

4.5.11 Signal definitions
Overview of Software
Signal "At Set Point"
Speed reference reached.
Speed actual value Speed Act (5.05) correspondes
to speed reference value before ramp generator
Ramp In Act (5.33). The deviation between both is
less than ±1,56% (1/64) of parameter maximum speed
Max Speed (1.06). Signal At Set Point is independent
on ON and RUN command.
Speed Act (5.05)
Ramp In Act (5.33)
n
speed ref
5DPS,Q$FW
I1
Comp
I2
Ramp In Act +1,56% of
Max Speed (1.06)
Ramp In Act -1,56% of
Max Speed (1.06)
6SHHG$FW
I1=I2
At Set Point
At Set Point = 0
$W6HW3R LQW
At Set Point = 0
t
Signals "Speed > Lev1“ / „Speed > Lev2“
Speed Level reached. Speed actual value Speed Act
(5.05) is equal or greater than value of parameter
Speed Level 1 / 2 (5.16 / 5.17). The permitted
hysteresis is -0,78% (1/128) of parameter Max Speed
(1.06). That means during rising speed the threshold
is exactly the value of Speed Level 1 / 2 (5.16 / 5.17),
during falling speed the threshold is Speed Level 1 /
2 (5.16 / 5.17) – 0,78%. Signals Speed > Lev1 /
Speed > Lev2 are independent on ON and RUN
command.
Speed Act (5.05)
Speed Level 1/2
n
Speed
Level 2
(5.17)
Speed
Level 1
(5.16)
(5.16/5 .17)
I1
Comp
I2
6SHHG$FW
6SHHG!/HY
6SHHG!/HY
6SHHG!/HY
6SHHG!/HY
I1=I2
Speed > Lev 1/2
Hys teresi s = 0,78 %
= Max Speed
(1.06) / 128
Hysteres is = 0,78%
= Max Speed
(1.06) / 128
t
Signal "Overtemp Mot" / "Overtemp DCS"
in case of Alarm
PTC (DCS / Motor-AI2)
Overtemp Mot/Overtemp DCS
Digital Output DOx
Fan On
$ODUP$RU$
A4-Converter Temp:high
A5-Motor Temp high
Signal "Overtemp Mot" / "Overtemp DCS"
in case of Fault
PTC (DCS / Motor-AI2)
Overtemp Mot/Overtemp DCS
Digital Output DOx
Fan On
)DXOW)RU)
F7-Converter Overtemp
F8-Motor Overtemp
Reset
Drive trips
Signal "Comm Fault"
If Cmd Location (2.02) = Bus the drive will trip in case
of fault F20- Communication Fault and will stop in
accordance to Comm Fault Mode (2.07). If Cmd
Location (2.02) = Makro depend or Terminals or
Key only an alarm A11-Comm Interrupt will be
shown and the drive will not trip.
Communication
Digital Output DOx
Comm Fault
F20-Communication
Fault
Reset
faulty
okok
II K 4-40
Page 65

4.5.12 User events
Adaptation of digital inputs for user events
First four digital inputs DI1…DI4 are re-configurable
in parameter group 9-Macro Adaptation for macro
1, 5, 6, 7 and 8. This functionality is not available for
macro 2, 3 and 4.
For some user specific application it’s helpful do
assign these inputs to user events External Fault or
External Alarm. With that these inputs are applicable
for e.g.
• Overtemperature protection using Klixon
• Pressure switch of fan
• Brush wear sensor
• or other digital events.
Normally open (NO) contacts have to be assigned in
parameter User Fault (9.05) or User Alarm (9.07)
and normally closed (NC) contacts in User Fault Inv
(9.06) or User Alarm Inv (9.08).
Overview of Software
User Alarm will be displayed at the operating panel
DCS400PAN as External Alarm (A12) and User
Fault as an External Fault (F22). The fault will trip the
drive.
External Fault (F22) or External Alarm (A12) occurs when switch is closing.
NO
DI1...DI4
User Fault (9.05) = DI1…4
or User Alarm (9.07) = DI1…4
+24V
External Fault (F22) or External Alarm (A12) occurs when switch is opening
NC
DI1...DI4
User Fault Inv (9.06) = DI1…4
or User Alarm Inv (9.08) = DI1…4
+24V
Maximal possible adaptation for user events:
DI1
User Fault (9.05) = DI1
DI2
User Fault Inv (9.06) = DI2
User Alarm (9.07) = DI3
DI3
DI4
User Alarm Inv (9.08) = DI4
+24V
II K 4-41
Page 66

4.6 Software Structure
X4:
1
DI1
2
DI2
3
DI3
DI4
DI5
DI6
DI7
DI8
+24 V
)LHOGEXV
56
3RUW
PC Tool
DI Act
6.28
Macro Select
2.01
DI1...DI4
DI1...DI4
Macro...
Ramp
Ramp
Flying start
Ramp
5.00s
1
4 Mbaud
Disabled
0s
Main Ctrl Word
8.01
4
5
6
7
8
9
DS1.1
DS1.2
DS1.3
'ULYH/RJLFDQG6WDWXV3URFHVVLQJ
Eme Stop
Reset
ON
RUN
Start
Stop
Macro dep.
9.02
Jog 1
9.20
Disable Bridge 2
2.02
Cmd Location
2.03
Stop Mode
2.04
Eme Stop Mode
2.09
Start Mode
2.07
Comm Fault Mode
2.08
Comm Fault Time
2.10
DDCS Node A ddr
2.11
DDCS Baud Rate
2.12
PTC Mode
2.13
Fan Delay
2.05
Main C trl Word
Tool Ctrl Word
constant 0
constant 1
Macro depend
Rdy for On
Rdy for Run
Running
Eme Stop act
Fault
Alarm
Fault or Alarm
Not (F or A)
Main Cont On
Fan On
Local
Communication Fault
Overtemp Mot
Overtemp DCS
Stalled
Forward
Revers
Zero Speed
Speed > Lev1
Speed > Lev2
Overspeed
At Set Point
Cur at Limit
Cur Reduce
Bridge 1
Bridge 2
Main Stat word
Tool Stat Word
DO1 Assign
6.11
DO2 Assign
6.12
DO3 Assign
6.13
DO4 Assign
6.14
DO5 Assign
6.15
MSW Bit 11 Assign
6.22
MSW Bit 12 Assign
6.23
MSW Bit 13 Assign
6.24
MSW Bit 14 Assign
6.25
Overview of Software
DO1
DO2
DO3
DO4
DO5
Main Stat
Word
2.06
≥
)LHOGEXV
DS2.1
8.01
DS2.2
DS2.3
56
3RUW
PC Tool
X5:
1
2
3
4
5
X98:1
X98:2
X3:1...8
X1:1
X1:2
X1:3
X1:4
X2:1
X2:2
X2:3
X2:4
3DQHO
3RUW
Panel
90...270V
30...90V
8...30V
+
-
+
-
10.00V
0.0V
10.00V
0.0V
Encoder
0rpm
Tacho Tacho n
Analog In 1
6.01
100%
6.02
0%
Analog In 2
6.03
100%
6.04
0%
5.03
5.34
Tacho Offset
0rpm
0rpm
0
0
2.00s
0
5.06
AI1 Act
6.26
AI2 Act
6.27
5.13
5.14
7.15
7.16
T
7.17
3.22
Panel Ctrl Word
act
Macro depend
Bus Main Ref
Fixed Speed 1
Fixed Speed 2
Commis Ref 1
Commis Ref 2
7.18
Squarewave
Fixed Torque
Bus Aux Ref
AI1
AI2
Squarewave
Constant 0
Panel Stat Word
Speed
Meas Mode
5.02
Speed
Ref Sel
5.01
Aux Sp
Ref1 Sel
5.26
10.0s
10.0s
0.00s
10.0s
10.0s
10.0s
10.0s
10.0s
Macro...
Torq
3.15
Ref Sel
Ramp
In Act
5.33
+
5.19
5.20
5.12
5.11
5.09
5.24
5.10
5.25
5.21
EMF Act
3.20
Speed Act
5.05
5DPS
*HQHUDWRU
Jog Accel Ramp
Jog Decel Ra mp
Ramp Shape
Eme Stop Ramp
Accel
Decel
Ref Filter Speed Lim
0ms
5.28
5.31
6500rpm
5.32
-6500rpm
Act Filter 1 Act Filter 2
+
5.29
0ms
Max Speed
50rpm
0rpm
0rpm
115%
0%
0.200
0.200
5000ms
5000ms
5.04
n
5.15
5.16
5.17
5.18
5.27
5.07
5.22
5.08
5.23
REF
0ms
5.30
3DQHO
3RUW
Panel
6SHHG
&RQWUROOHU
KP
TI
II K 4-42
Page 67

2YHUYLHZRIDOWHUQDWLYH'ULYH &RQWUROOLQJSRVVLELOLWLHV
5HIHUHQFHV&RQWURO $FWXDOYDOXHV6WDWXV
Overview of Software
RQHRIWKHVH
LVSRVVLEOH
Fieldbus
Adapter Module
PE SHFDG D(N)D(P)SH
RXD
X2
TXD
Nxxx-01
xxxxxxxx
ADAPTER
XMIT
BUS
TERMINATION
REC
ON
OFF
ERROR
X1
PE SHFDG D(N)D(P)
+24V 0V SH
3&
RS232/RS485 Adapter
$%%
440V 368A 1500r pm
1500rpm
OUTPUT MENU AUTO OFF HAND REM LOC <RUN>
(17(50(18
/2&
5(6(7
5(0
DCS400PAN
MIN
Σ
130%
0%
0.0s
3/&
%XVV\VWHP
,QWHUQDOSURFHVVLQJ
Main C trl Word
Bus Main Ref
Bus Aux Ref
Tool Ctrl Word
DO1...DO5
AO1
AO2
Main Stat Word
n
Act
Ia
Act
Tool Stat Word
Fld Cur Act
Power Act
Torque Act
Panel Ctrl Word Panel Stat Word
;
;
9
Fieldbus
RS232-
Port
PC Tool
Panel-
Port
Panel
8.01
Dataset 1.1
Dataset 1.2
Dataset 1.3
Dataset 3.1
Dataset 3.2
Dataset 3.3
DS1.1
DS1.2
DS1.3
DS3.1
DS3.2
DS3.3
EMF Contr EMF Ctrl Flux Field Cur Contr
Flux Ref
Macro depend
4.11
4.12
Cur Ctrl
Mode
3.14
0.550
160ms
Torq Lim
4.07
4.08
4.09
4.10
Torq
29%
53%
79%
0%
4.03
4.04
4.05
4.06
0.300
200ms
130%
30%
Arm Cur Lim
Speed Contr
Torque Contr
Speed + Torque
Lim Sp Ctr
Lim Trq Ctr
U1
1.09
1.10
6XSSO\
1.11
Cur Contr
V1 W1
0DLQ
1.07
1.08
3.07
3.08
english
Mains
Volt Act
Mains
Freq Act
-100%
none
none
100%
Current
0DLQWDLQDQFH
7.01
Language
7.02
Contr Service
7.03
Diagnosis
3.04
3.05
3.06
3.17
3.18
3.24
3.25
7.04
Sw Version
Conv Type
7.05
Conv Nom Cu r
7.06
7.07
Conv Nom Volt
Volatile Alarm
7.08
7.09
Fault Word 1
7.10
Fault Word 2
Fault Word 3
7.11
7.12
Alarm Word 1
Alarm Word 2
7.13
7.14
Alarm Word 3
Pan Text Vers
7.19
CPU Load
7.20
CON-Board
7.21
100%
0s
0s
100%
0.0
100%
0%
DS2.1
DS2.2
6.20
DS2.3
6.21
DS4.1
DS4.2
DS4.3
Parameter
Selector
3.14
Field Exciter
Ia
Ref
3.01
Cur Slope Arm Cur Ctrl
10%/ms
3.16
s
$FWXDO9DOXHV
Speed Act / 5.05
Speed Ref / 5.04
Arm Volt Act / 3.03
Arm Cur Ref / 3.01
Arm Cur Act / 3.02
Power Act / 3.21
Torque Act / 3.23
Fld Cur Act / 4.02
Dataset 2.1
Dataset 2.2
Dataset 2.3
Dataset 4.1
Dataset 4.2
Dataset 4.3
/HJHQG
Parameter with
default value Signal
1.01
IGBT
0.100
3.09
50ms
3.10
50%
3.11
0mH
3.12
0mΩ
3.13
Macro depend
4A
4.02
Ie
8.01
Act
Ia
Act
3.02
Pulse
Firing
AO1 Ass
AO2 Ass
6.16...6.19
%XVV\VWHP
Fieldbus
RS232-
Port
PC Tool
Panel-
Port
Panel
3.20
EMF Act
Thyr.
module
3.19
Firing
Angle
6.05
bipolar
10.00V
6.08
bipolar
10.00V
6.20
Dataset 2.2 Ass
6.21
Dataset 2.3 Ass
Panel Act 1
Panel Act 2
Panel Act 3
Panel Act 4
Fieldbus
Adapter Module
PE SHFDG D(N)D(P)SH
RXD
X2
TXD
XMIT
REC
ERROR
X1
9
PE SHFDG D(N)D(P)
+24V 0V SH
;
RS232/RS485 Adapter
;
440V 368A 1500r pm
1500rpm
OUTPUT MENU AUTO OFF HAND REM LOC <RUN>
/2&
5(6(7
5(0
DCS400PAN
1.03
1.04
3.20
Ua
Act
3.03
1.01
1.02
100rpm
1.05
100rpm
1.06
6500rpm
1.12
Analog Out 1
6.06
6.07
Analog Out 2
6.09
6.10
Nxxx-01
xxxxxxxx
ADAPTER
BUS
TERMINATION
ON
OFF
3&
$%%
(17(50(18
Field
0.40A
310V
P
Act
3.21
3.23
T
Act
0
4A
50V
X2:8
X2:5
X2:9
Panel Display
440V 368A 1500r pm
1500Upm
OUTP UT MENU AUTO OFF HAND REM LOC <RUN>
II K 4-43
Page 68

4.7 Parameter list
Overview of Software
Parameter overview
1 - Motor Settings 2 - Operation Mode 3 - Armature 4 - Field
1.01 Arm Cur Nom
1.02 Arm Volt Nom
1.03 Field Cur Nom
1.04 Field Volt Nom
1.05 Base Speed
1.06 Max Speed
1.07 Mains Volt Act
1.08 Mains Freq Act
1.09 Arm Overv Trip 2.09 Start Mode 3.09 Arm Cur Reg KP 4.09 Field Cur 90%
1.10 Net Underv Trip 2.10 DDCS Node Addr 3.10 Arm Cur Reg TI 4.10 Field Heat Ref
1.11 Net Fail Time 2.11 DDCS Baud Rate 3.11 Cont Cur Lim 4.11 EMF KP
1.12 Cur Lim Speed 2.12 PTC Mode 3.12 Arm Inductance 4.12 EMF TI
*
2.01 Macro Select
*
2.02 Cmd Location
*
2.03 Stop Mode
*
2.04 Eme Stop Mode *3.04 Arm Cur Max
* 2.05 Main Ctrl Word
* 2.06 Main Stat Word
2.07 Comm Fault Mode 3.07 Torque Lim Pos *4.07 Field Cur 40%
2.08 Comm Fault Time 3.08 Torque Lim Neg *4.08 Field Cur 70%
2.13 Fan Delay 3.13 Arm Resistance
* 3.01 Arm Cur Ref 4.01 Field Cur Ref
* 3.03 Arm Volt Act
3.02 Arm Cur Act 4.02 Field Cur Act
3.05 Overload Time 4.05 Fld Ov Cur Trip
3.06 Recovery Time 4.06 Field Low Trip
3.14 Cur Contr Mode
3.15 Torque Ref Sel
3.16 Cur Slope
3.17 Stall Torque
3.18 Stall Time
3.19 Firing Angle
3.20 EMF Act
3.21 Power Act
3.22 Fixed Torque
3.23 Torque Act
3.24 Arm Cur Lim 2
3.25 Arm Cur Lev
*
*
4.03 Field Cur KP
*
4.04 Field Cur TI
5 - Speed Controller 6 - Input/Output 7 - Maintenance 8 - Fieldbus 9 - Macro Adaptation
5.01 Speed Ref Sel 6.01 AI1 Scale 100% 7.01 Language
5.02 Speed Meas Mode *6.02 AI1 Scale 0% 7. 02 Contr Service 8.02 Fieldbus Par 2 9.02 Jog 1
5.03 Encoder Inc
5.04 Speed Ref
5.05 Speed Act
5.06 Tacho Speed Act
5.07 Speed Reg KP 6.07 AO1 Scale 100%
5.08 Speed Reg TI 6.08 A O2 Assign
5.09 Accel Ramp
5.10 Decel Ramp
5.11 Eme Stop Ramp *6.11 DO1 Assign
5.12 Ramp Shape 6.12 DO2 Assign
5.13 Fixed Speed 1 6.13 DO3 Assign
5.14 Fixed Speed 2 6.14 DO4 Assign
5.15 Zero Speed Lev *6.15 DO5 Assign
5.16 Speed Level 1
5.17 Speed Level 2
5.18 Overspeed Trip 6.18 Panel Act 3
5.19 Jog Accel Ramp 6.19 Panel Act 4
5.20 Jog Decel Ramp 6.20 Dataset 2.2 Asn
5.21 Alt Par Sel 6.21 Dataset 2.3 Asn
5.22 Alt S peed KP 6.22 MSW Bit 11 Asn
5.23 Alt S peed TI 6.23 MSW Bit 12 Asn
5.24 Alt Accel Ramp 6.24 MSW Bit 13 Asn
5.25 Alt Decel Ramp 6.25 MSW Bit 14 Asn
5.26 Aux Sp Ref Sel
5.27 Drooping
5.28 Ref Filt Time
5.29 Act Filt 1 Time
5.30 Act Filt 2 Time
5.31 Speed Lim Fwd
5.32 Speed Lim Rev
5.33 Ramp In Act
5.34 Tacho Offset
*
6.03 AI2 Scale 100%
6.04 AI2 Scale 0%
6.05 AO1 Assign
6.06 AO1 Mode
*
6.09 AO2 Mode
*
6.10 AO2 Scale 100%
*
6.16 Panel Act 1 7.16 Commis Ref 2 8.16 Fieldbus Par 16 9.16 Add AuxSpRef
*
6.17 Panel Act 2 7.17 Squarewave Per 9.17 Curr Lim 2 Inv
6.26 AI1 Act
6.27 AI2 Act
6.28 DI Act
*
*
*
*
*
*
*
*
*
7.03 Diagnosis
7.04 SW Version
7.05 Conv Type
7.06 Conv Nom Cur
*
7.07 Conv Nom Volt
7.08 Volatile Alarm
7.09 Fault Word 1
*
7.10 Fault Word 2
7.11 Fault Word 3
7.12 Alarm Word 1
7.13 Alarm Word 2
7.14 Alarm Word 3
7.15 Commis Ref 1 8.15 Fieldbus Par 15 9.15 Ext Speed Lim
7.18 Squarewave Act
7.19 Pan Text Vers
7.20 CPU Load
7.21 Con-Board
*
8.01 Fieldbus Par 1 9.01 MacParGrpAction
8.03 Fieldbus Par 3 9.03 Jog 2
8.04 Fieldbus Par 4 9.04 COAST
8.05 Fieldbus Par 5 9.05 User Fault
8.06 Fieldbus Par 6 9.06 User Fault Inv
8.07 Fieldbus Par 7 9.07 User Alarm
8.08 Fieldbus Par 8 9.08 User Alarm Inv
8.09 Fieldbus Par 9 9.09 Dir of Rotation
8.10 Fieldbus Par 10 9.10 MotPot Incr
8.11 Fieldbus Par 11 9.11 MotPot Decr
8.12 Fieldbus Par 12 9.12 MotPot MinSpeed
8.13 Fieldbus Par 13 9.13 Ext Field Rev
8.14 Fieldbus Par 14 9.14 AlternativParam
9.18 Speed/Torque
9.19 Disable Bridge1
9.20 Disable Bridge2
Legend
normal Parameter, constantly available
Grey shaded hidden Parameters and Signals (actual values)
Bold Signals (actual values)
underlined
by Autotuning influenced parameters
* by Start-up wizard influenced parameters (Panel & PC)
II K 4-44
Page 69

Overview of Software
ParNo. Parameter name and significance Min Max Default Unit (1)
Grp 1 Motor Settings
1.01
Wizard
Arm Cur Nom
Nominal motor current in amperes
41000
(2)
4A x
(indicated on the motor’s rating plate).
1.02
Wizard
Arm Volt Nom
Nominal motor voltage in volts
50 700 50 V x
(indicated on the motor’s rating plate).
1.03
Wizard
Field Cur Nom
Nominal field current in amperes
0.10 20.00
(2)
0.40 A x
(indicated on the motor’s rating plate).
1.04
Wizard
Field Volt Nom
Nominal field voltage in volts
50 440 310 V x
(indicated on the motor’s rating plate).
1.05
Wizard
Base Speed
Nominal motor speed in revolutions/minute
100 6500 100 rpm x
(indicated on the motor’s rating plate).
Base Speed = Max Speed = no Fieldweakening
Base Speed < Max Speed = Fieldweakening
1.06
Wizard
Max Speed
Maximum motor speed in revolutions/minute
100 6500 100 rpm x
(indicated on the motor’s rating plate).
Base Speed = Max Speed = no Fieldweakening
Base Speed < Max Speed = Fieldweakening
1.07
Signal
1.08
Signal
Mains Volt Act
Measured mains voltage in volts.
Mains Freq Act
Measured mains frequency in hertz.
---V
---Hz
Long Parameter Menu
1.09 Arm Overv Trip
20 150 130 %
Motor overvoltage tripping limit in % related to the
nominal motor voltage (1.02)
1.10 Net Underv Trip
-10 50 0 %
Trip level for mains undervoltage.
The power part of the DCS400 can operate on a
supply voltage of 230…500 V. A parameter setting
based on this is therefore not possible. The
minimum allowable mains voltage is calculated from
the parameter nominal motor voltage Arm Volt Nom
(1.02). If the mains voltage falls below the
calculated voltage the drive switches off and gives
an alarm F09.
The minimum voltage is calculated with
U
≥ Ua / (1,35 x cos alpha)
mains
cos alpha: 4Q = 30° = 0,866
2Q = 15° = 0,966
4Q: U
2Q: U
≥ Ua / (1,35 x 0,866)
mains
≥ Ua / (1,35 x 0,966)
mains
This parameter defines an additional safety margin
over the minimum allowable mains voltage.
(1) no changes possible if the drive is in ON-status
(2) depends on converter's Typecode
custom
setting
II K 4-45
Page 70

Overview of Software
ParNo. Parameter name and significance Min Max Default Unit (1)
Grp 1 Motor Settings (continued)
1.11 Net Fail Time
0.0 10.0 0.0 s x
During this time the supply voltage must return to a
value higher than Net Underv Trip (1.10). Otherwise
an undervoltage trip will be generated.
0 = restart prevented. In case of mains under-
voltage the drive will switch off with a fault
message.
>0 = automatic restart of the drive if the mains
voltage recovers within the set time.
(U
result of (1.10))
line>
1.12 Cur Lim Speed
100 6500 6500 rpm x
Speed-dependent current limitation. From this
speed value onward, the armature current will be
reduced to a proportional basis of 1/n.
Cur Lim Speed > Max Speed = no speed depend
current limit.
Cur Lim Speed < Max Speed = speed depend
current limitation
(1) no changes possible if the drive is in ON-status
custom
setting
II K 4-46
Page 71

Overview of Software
ParNo. Parameter name and significance Min Max Default Unit (1)
Grp 2 Operation Mode
2.01
Wizard
2.02 Cmd Location
2.03
Wizard
Macro Select
Selection of desired macro:
0 = Standard
1 = Man/Const Sp
2 = Hand/Auto
3 = Hand/MotPot
4 = Jogging
5 = Motor Pot
6 = ext FieldRev
7 = Torque Cntrl
Selection of the desired command location. The command location which has been set controls the drive (ON
/ RUN / Reset / Eme Stop).
0 = Makro depend
Command Location is defined by selected macro. The
definition for macro 1…8 is Terminals.
1 = Terminals
Command location is Terminal X4:1…8. The functionality of digital inputs DI1…DI8 is defined by selected
macro.
2 = Bus
Command location is a PLC connected to one of
serial interfaces Panel-Port or RS232-Port or Field-
bus Adapter. The drive will be controlled by Main
Control Word (allocation see chapter 7 Serial Inter-
face). During bus communication Emergency Stop
and Reset from terminal block are also effective.
3 = Key
Automatic switch over from Bus (2) to Terminals (1)
in case of communication faults. In this case it is
possible to control the drive via ON and RUN command from Terminals. The commands could be connected to a key switch. When the switch will be closed the drive starts and accelerate to a speed defined
in parameter Fixed Speed (5.13), provided that
Speed Ref Sel (5.01) = Bus Main Ref. When the
switch will be opened and there are no longer communication faults the command location switches
back to Bus.
Stop Mode
Selection of the desired operating response to a Stop
command (controller blocking)
0 = Ramp - Motor decelerates in acc. to
1 = Torque Lim - Motor decelerates in acc. to torque limit
2 = Coast - Motor coasts to zero speed.
command works
Stop
on current controller mode
Response time of deceleration by
depends on optimization of speed controller. Therefore the
speed controller must be adjusted. If
set is Selected (5.21) for speed controller it’s also valid for
command. Only
Stop
troller settings.
Disable Bridge 1 (9.19)
also effective during
ked) it’s not possible to brake the drive by using
Torque Lim
are enabled for braking down the drive if necessary.
External
communication
current / torque limitation via
Stop Mode
. Use external wiring to make sure that bridges
doesn’t have any effect to
speed controlled independent
always
Cur Contr Mode (3.14)
is independend on speed con-
Coast
and
Disable Bridge 2 (9.20)
Decel Ramp (5.10)
or
Ramp
ernative
Alt
. If a bridge is disabled (lok-
analog input
settings.
Torque Lim
ameter-
Par
are
Ramp
or
Stop Mode
or
serial
.
070Text
030Text
020Text
x
x
x
(1) no changes possible if the drive is in ON-status
custom.
setting
II K 4-47
Page 72

Overview of Software
g
ParNo. Parameter name and significance Min Max Default Unit (1)
Grp 2 Operation Mode (continued)
2.04
Wizard
Eme Stop Mode
Selection of the desired operating response to an
020Text
x
Eme Stop command (controller blocking)
0 = Ramp
Motor decelerates in acc. to
If
Zero Speed Lev (5.15)
is switched off.
1 = Torque Lim
Motor decelerates in acc. to torque limit. If
Speed Lev (5.15)
ched off.
2 = Coast
Main Contactor is switched off. Motor coasts to zero
speed.
Eme Stop
independent on current controller mode
(3.14)
or
Torque Lim
troller. Therefore the speed controller must be adjusted.
If
Alt
controller it’s also valid for Eme Stop command. Only
Coast
Disable Bridge 1 (9.19)
also effective during
abled (locked) it’s not possible to brake the drive by using
Ramp
that bridges are enabled for braking down the drive if
necessary.
External
serial communication
Stop Mode
command works
settings. Response time of deceleration by
ernative
is independend on speed controller settings.
or
Torque Lim
current / torque limitation via
.
is reached Main Contactor is swit-
depends on optimization of speed con-
ameterset is
Par
Eme Stop Mode
. Use external wiring to make sure
doesn’t have any effect to
Eme Stop Ramp (5.11)
is reached Main Contactor
speed controlled
always
Cur Contr Mode
ected
Sel
and
Disable Bridge 2 (9.20)
(5.21)
. If a bridge is dis-
analog input
Zero
for speed
.
Ramp
are
or
Eme
custom.
setting
Without
Emergency Stop
Coast
activated using the
With
Cmd Location (2.02) = Bus:
Emergency Stop
and must be provided.
Emer
via bus
from terminal has been activated in parameter Coast
(9.04)
both must be provided.
Cmd Location (2.02) = Key:
If the bus is functioning properly, the behaviour is as
described in
malfunctioning, the
functions will be suppressed; only the
active. This enables the drive to be controlled from the
terminal without any trouble.
serial communication:
from terminal is
from terminal will not be valid until it has been
Coast (9.04)
serial communication:
and
Coast
ency Stop from terminal
are
, then
ed; both must be provided. When
AND
terminal
Cmd Location (2.02) = Bus
and
Emergency Stop
parameter.
via the bus are “1” active
Coast via bus
valid.
always
and
Emergency Stop
and
Coast via bus
terminal
(1) no changes possible if the drive is in ON-status
Coast
are
. If the bus is
ed;
AND
remains
II K 4-48
Page 73

Overview of Software
ParNo. Parameter name and significance Min Max Default Unit (1)
Grp 2 Operation Mode (continued)
2.05
Signal
2.06
Signal
(1) no changes possible if the drive is in ON-status
Main Ctrl Word
The Main Ctrl Word maps the control bits of the
drive. This parameter indicates the control bits of
the terminal block or of the bus communication. The
allocation is identical with the control word of field
bus communication.
Bit hex definition (log. „1“state)
00 0001 On
01 0002 Coast (not)
02 0004 Eme Stop (not)
03 0008 Run
04 0010 05 0020 06 0040 07 0080 Reset
08 0100 Jog 1
09 0200 Jog 2
10 0400 11 0800 MCW Bit 11
12 1000 MCW Bit 12
13 2000 MCW Bit 13
14 4000 MCW Bit 14
15 8000 MCW Bit 15
Main Stat Word
The Main Stat Word maps the status bits of drive
and status logic. The allocation is identical with the
status word of field bus communication.
Bit hex definition (log. "1" state)
00 0001 Rdy On
01 0002 Rdy Running
02 0004 Running
03 0008 Fault
04 0010 Coast Act (not)
05 0020 Eme Stop Act (not)
06 0040 07 0080 Alarm
08 0100 At Setpoint
09 0200 Remote
10 0400 Above Limit 1 (> 5.16)
11 0800 MSW Bitt 11 Ass (6.22)
12 1000 MSW Bitt 12 Ass (6.23)
13 2000 MSW Bitt 13 Ass (6.24)
14 4000 MSW Bitt 14 Ass (6.25)
15 8000 DDCS Breakdown
---hex
---hex
custom.
setting
II K 4-49
Page 74

Overview of Software
(1)
ParNo. Parameter name and significance Min Max Default Unit (1)
Grp 2 Operation Mode (continued)
Long Parameter Menu
2.07 Comm Fault Mode
Selection of the desired operating response to a
communication failure:
0 = Ramp
Motor is decelerated in accord. to a ramp (5.10)
1 = Torque Lim
Motor is decelerated in accord. to the torque limit
2 = Coast
fault message and shutdown of drive
Response time of deceleration by Ramp or Torque
depends on optimization of speed regulator.
2.08 Comm Fault Time
Tolerance time for fault messages in the case of
communication faults. Time between two successive
messages. If (2.08) = 0.00 s ignore, and continue
with ongoing operation
2.09 Start Mode
Selection of the desired operating response to a
start command, while drive is still rotating, braking
or coasting
0 = Start From 0: wait until motor has reached zero
speed, then re-start
1 = Flying start: Start with the motor actual speed
2.10 DDCS Node Addr
Internal DDCS address between DCS400 and the
field bus adapter.
2.11 DDCS Baud Rate
Transmission speed between DCS400 and field bus
adapter.
0 = 8 Mbaud
1 = 4 Mbaud
2 = 2 Mbaud
3 = 1 Mbaud
2.12 PTC Mode
The response of the drive when the thermistor trips
is selectable:
0 = Disabled no PTC evaluation
1 = Alarm generates
2 = Fault generates
the drive off.
A thermistor in the motor (PTC element) can be
evaluated via the analog input
Thermistor connection to
Connect
Insert the jumper
If PTC is allocated to
available to other functions any more. If
parameterized as a reference source (macro 1, 2, 4,
5, 7), the Alarm
generated. Then set parameter
(3.15) = Const Zero
2.13 Fan Delay
Adjustable time for signal „
when the drive is switched off (ON=0). If motor or
DCS400 is overheated, Fan Delay will be started
after cooling.
no changes possible if the drive is in ON-status
X2:4
with
S1:5-6
Parameter Conflict (A16)
Alarm A05
Fault F08
AI2
X2:3
and
X2:5 (0V).
(22k to 10V).
AI2
this input will not be
Torque Ref Sel
.
Fan On
and switches
in DCS400.
X2:4.
“. Will be started
only
AI2
is
will be
0 2 0 Text
0.00 10.00 5.00 s
0 1 1 Text
1 254 1 integer
0 3 1 integer
0 2 0 Text
0 1200 0 s
x
x
x
x
x
custom.
setting
II K 4-50
Page 75

Overview of Software
ParNo. Parameter name and significance Min Max Default Unit (1)
Grp 3 Armature
3.01
Signal
3.02
Signal
Arm Cur Ref
Armature current reference value in amperes.
Arm Cur Act
Measured armature current actual value in
---A
---A
amperes.
3.03
Signal
3.04
Wizard
Arm Volt Act
Measured armature voltage actual value in volts.
Arm Cur Max
Overload current. Max. permissible armature current
---V
0 200 100 % x
in % related to the nominal motor current (1.01).
Independent of the sign, applies to either direction.
Directional limitations are set in par. Torque Lim Pos
(3.07) and Torque Lim Neg (3.08).
3.05 Overload Time
Overload time for I
for the armature current (3.04).
2
t function disabled.
0 = I
3.06 Recovery Time
Recovery time for I
reduced current must flow.
2
t function disabled.
0 = I
3.07
Wizard
Torque Lim Pos
Positive overload torque. Max. permissible positive
2
t function. Max. permissible time
2
t function, during which a
0 180 0 s
0 3600 0 s
0 200 100 % X
torque in % related to the nominal torque.
(The nominal torque is defined as the torque
resulting from nominal field current and nominal
armature current)
The torque reference is limited as a function of the
sign. The current resulting from this operation is
then limited in parameter Arm Cur Max (3.04)
independent of the sign i.e. the smaller the two
values will be effective.
Is also used as positive current limitation if
Cur Contr Mode (3.14) = Cur Contr
3.08
Wizard
Torque Lim Neg
Negative overload torque. Max. permissible
-200 0 -100
(4-Q)
%X
negative torque in % related to the nominal torque.
(The nominal torque is defined as the torque
resulting from nominal field current and nominal
0
(2-Q)
armature current)
Limits the torque reference as a function of the sign.
The current resulting from this operation is then
limited in par. Arm Cur Max (3.04) independent of
the sign i.e. the smaller the two values will be
effective.
Is also used as negative current limitation if
Cur Contr Mode (3.14) = Cur Contr
3.09
auto-
tuning
Arm Cur Reg KP
Proportional gain of the armature current controller
(PI controller).
0.000 10.000 0.100 integer
(1) no changes possible if the drive is in ON-status
custom.
setting
II K 4-51
Page 76

Overview of Software
ParNo. Parameter name and significance Min Max Default Unit (1)
Grp 3 Armature (continued)
3.10
auto-
tuning
3.11
auto-
tuning
3.12
auto-
tuning
3.13
auto-
tuning
3.14 Cur Contr Mode
(1) no changes possible if the drive is in ON-status
Arm Cur Reg TI
Integration time constant of the armature current
controller (PI controller) in milliseconds.
Cont Cur Lim
Armature current value at the limit between
intermittent and continuous current in % related to
the nominal motor current (1.01)
Arm Inductance
Armature circuit inductance in millihenries.
Arm Resistance
Armature circuit resistance in milliohms.
Long Parameter Menu
0 = Macro depend The operating mode is defined
by macro, see macro descript.
1 = Speed Contr Speed control
2 = Torque Contr Torque control
3 = Cur Contr Current control
4 = Speed+Torque Speed + torque, both
reference values are added
5 = Lim SP Ctr Speed control with external
torque limitation. That speed
reference via AI1 can be
limited externally via AI2 in its
torque. The torque limitation is
sign-independent.
6 = Lim Trq Ctr Torque control with speed
limitation (window control
mode) for master-slave
applications. Master and slave
receive the same speed
reference. The slave has its
own speed feedback (tacho-
generator / encoder), but is
working in the current or
torque control mode. If the
speed deviation (reference /
actual value) > ±50 rpm, there
will be an automatic
changeover to speed control
until the deviation is corrected.
Then this mode will be
resumed.
0.0 1000.0 50.0 ms
0 100 50 %
0.00 655.35 0.00 mH x
0 65535 0 mOhm x
0 6 0 Text x
custom.
setting
II K 4-52
Page 77

Overview of Software
ParNo. Parameter name and significance Min Max Default Unit (1)
Grp 3 Armature (continued)
3.15 Torque Ref Sel
Selection of the desired torque reference location:
0 = Macro depend / dependent on the select. macro
1 = AI1 / analog input 1 (X2:1-2)
2 = AI2 / analog input 2 (X2:3-4)
3 = Bus Main Ref / main fieldbus reference value
4 = Bus Aux Ref / auxiliary fieldbus reference value
5 = Fixed Torque / fixed torque value (3.22)
6 = Commis Ref1 / commissioning reference value 1
7 = Commis Ref2 / commissioning reference value 2
8 = Squarewave / square-wave generator
9 = Const Zero / torque ref = constant zero
It is also used as current reference source if
Cur Contr Mode (3.14) = Cur Contr
3.16 Cur Slope
Max. permissble modification of the armature
current reference value (di/dt) in % per millisecond
related to the nominal motor current (1.01).
3.17
Wizard
3.18
Wizard
3.19
Signal
3.20
Signal
3.21
Signal
3.22 Fixed Torque
3.23
Signal
3.24 Arm Cur Lim 2
3.25 Arm Cur Lev
(1) no changes possible if the drive is in ON-status
Stall Torque
Motor stall protection.
Stall protection tripping threshold in % of the
nominal torque at stalled motor.
(The nominal torque is defined as the torque
resulting from nominal field current and nominal
armature current)
Stall Time
Motor stall protection.
Time interval in seconds, during which the stall
protection tripping threshold at stalled motor must
be exceeded.
Firing Angle
Actual firing angle in degrees
EMF Act
Actual counter EMF of motor in volts.
Power Act
Actual power output in kilowatts
Fixed torque value presetting.
Fixed torque value in % related to the nominal
torque.
(The nominal torque is defined as the torque
resulting from nominal field current and nominal
armature current)
Torque Act
Actual torque value in % related to the nominal
torque.
(The nominal torque is defined as the torque
resulting from nominal field current and nominal
armature current)
Second current limitation in % related to the nominal
motor current (1.01). Can be activated via binary
signal. Refer also to parameter (9.17).
Threshold for „Armature current actual is greater
than …“ signal.
0 9 0 Text
0.1 30.0 10.0 % / ms
0 200 100 %
0.0 60.0 0.0 s
- - - °
- - - V
- - - kW
-100 100 0 %
- - - %
0 200 100 % x
0 200 0 %
x
custom.
setting
II K 4-53
Page 78

Overview of Software
ParNo. Parameter name and significance Min Max Default Unit (1)
Grp 4 Field
4.01
Signal
4.02
Signal
4.03
auto-
tuning
4.04
auto-
tuning
4.05 Fld Ov Cur Trip
4.06 Field Low Trip
4.07
auto-
tuning
4.08
auto-
tuning
4.09
auto-
tuning
4.10 Field Heat Ref
4.11
auto-
tuning
4.12
auto-
tuning
(1) no changes possible if the drive is in ON-status
Field Cur Ref
Field current reference value in amperes.
Field Cur Act
Measured field current actual value in amperes.
Field Cur KP
Proportional gain of the field current controller
(PI controller).
Field Cur TI
Integration time constant of the field current
controller
(PI controller) in milliseconds.
Long Parameter Menu
Field overcurrent tripping in % related to the field
current nominal value (1.03).
Field undercurrent tripping value in % related to the
field current nominal value (1.03).
Considerably lower values than the default setting
may be required for field weakening.
Field Cur 40%
Field current, at which 40% of field flux is reached.
Proportion of the nominal field current (1.03) in %.
Field Cur 70%
Field current, at which 70% of field flux is reached.
Proportion of the nominal field current (1.03) in %.
Field Cur 90%
Field current, at which 90% of field flux is reached.
Proportion of the nominal field current (1.03) in %.
Current reference value for the field heating in %
related to the nominal field current value (1.03).
0 = without field heating
>0 = with field heating (heating current in %)
With this parameter, an anti-condensation heating
via the field winding can be implemented for the
motor.
The field heating starts 10 s after ON command
•
(without RUN command).
The field heating will switch on automatically
•
10 s after the drive is stopped (RUN=0) and the
actual speed is lower than Zero Speed Lev
(5.15).
• When the drive starts again (
will switch over to nominal field current.
EMF KP
Proportional gain of the EMF controller
(PI controller).
EMF TI
Integration time constant of the EMF controller
(PI controller) in milliseconds.
581
=1) the drive
---A
---A
0.000 13.499 0.300 integer
0 5120 200 ms
0 150 130 %
5 100 30 %
0 100 29 %
0 100 53 %
0 100 79 %
0 30 0 %
0.000 10.000 0.550 integer
0 10240 160 ms
custom.
setting
II K 4-54
Page 79

Overview of Software
ParNo. Parameter name and significance Min Max Default Unit
Grp 5 Speed Controller
5.01 Speed Ref Sel
Selection of the desired speed reference location:
0 = Macro depend / dependent on the selected
macro
1 = AI1 / analog input 1 (X2:1-2)
2 = AI2 / analog input 2 (X2:3-4)
3 = Bus Main Ref / main fieldbus reference value
4 = Bus Aux Ref / auxiliary fieldbus reference value
5 = Fixed Sp1 / fixed speed value 1 (5.13)
6 = Fixed Sp2 / fixed speed value 2 (5.14)
7 = Commis Ref1 / commissioning ref. value 1
8 = Commis Ref2 / commissioning ref. value 2
9 = Squarewave / square-wave generator
10 = Const Zero / constant zero speed
5.02
Wizard
5.03
Wizard
5.04
Signal
5.05
Signal
5.06
Signal
5.07
auto-
tuning
5.08
auto-
tuning
5.09
Wizard
5.10
Wizard
5.11
Wizard
Speed Meas Mode
Selection of the desired speed feedback:
0 = EMF (i.e. without speed measurement)
1 = Analog Tacho
2 = Encoder
Encoder Inc
Number of the encoder increments per revolution.
Speed Ref
Actual speed reference value in revolutions/minute.
Speed Act
Actual speed value used by the speed controller, in
revolutions/minute.
Tacho Speed Act
Actual speed value measured by the analog
tachometer, in revolutions/minute.
Speed Reg KP
Proportional gain of the speed controller
(PI controller).
Speed Reg TI
Integration time constant of the speed controller
(PI controller) in milliseconds.
Accel Ramp
Duration of the acceleration ramp in seconds in the
case of acceleration from 0 to maximum speed (1.06).
Decel Ramp
Duration of the deceleration ramp in seconds in the
case of deceleration from maximum speed (1.06) to 0.
Eme Stop Ramp
Duration of the deceleration ramp in seconds in the
case of deceleration from maximum speed (1.06) to 0,
as a consequence of an emergency stop trip.
0100Text
020Text
20 10000 1024 integer
---rpm
---rpm
---rpm
0.000 19.000 0.200 integer
0.0 6553.5 5000.0 ms
0.0 3000.0 10.0 s
0.0 3000.0 10.0 s
0.0 3000.0 10.0 s
(1) no changes possible if the drive is in ON-status
(1)
x
x
x
x
x
x
custom.
setting
II K 4-55
Page 80

Overview of Software
ParNo. Parameter name and significance Min Max Default Unit (1)
Grp 5 Speed Controller (continued)
Long Parameter Menu
5.12 Ramp Shape
0.00 10.00 0.00 s x
0 = linear
>0 = ramp shape time
Setting the ramp shape:
This parameter adds a filter to the output of the
ramp generator to create a ramp shape. The value
of this parameter defines the ramp shape time
which can be set between 0.08 and 10.00 s. A value
< 0.08 but > 0.00 s is set to 0.08 s. The value 0.00
disables the ramp shape time.
Operating mode with ramp shape time:
The selected ramp shape time will be effective for
every reference value change, i.e. for the motor
potentiometer function, the constant speeds 1 and 2
and during switching on and off with the RUN
command. If a communication fault occurs and if the
parameter Comm Fault Mode (2.07) = Ramp the
ramp shape time will be effective, too.
Operating modes without ramp shape time:
A selected ramp shape time command will not be
effective during switching off with the RUN
command if the parameter Stop Mode (2.03) =
Torque Lim or Coast. The same applies in case of
a communication fault. In case of emergency stop
by means of the digital input DI5 the ramp shape
time will be ineffective, too even if the parameter
Eme Stop Mode (2.04) = Ramp.
5.13 Fixed Speed 1
Fixed speed value 1 in revolutions/minute.
-6500 6500 0 rpm
Parameter specifying a constant speed reference
value. Can activated with parameter Speed Ref Sel
(5.01) or by a macro. The applicable ramp times are
set with the parameters Jog Accel Ramp (5.19)
and Jog Decel Ramp (5.20). Is used as jogging
and/or constant speed in the macros 1 / 2 / 3 / 4 / 5
/ 6 / 7.
5.14 Fixed Speed 2
Fixed speed value 2 in revolutions/minute.
-6500 6500 0 rpm
Parameter specifying a second constant speed
reference value. Can be activated with parameter
Speed Ref Sel (5.01) or by a macro. The applicable
ramp times are set with the parameters Jog Accel
Ramp (5.19) and Jog Decel Ramp (5.20). Is used
as jogging and/or constant speed in the macros 1 /
2 / 5.
(1) no changes possible if the drive is in ON-status
custom.
setting
II K 4-56
Page 81

Overview of Software
ParNo. Parameter name and significance Min Max Default Unit (1)
Grp 5 Speed Controller (continued)
5.15
Wizard
Zero Speed Lev
Zero speed signal. Speed level below which the
0 100 50 rpm
signal is issued that the motor has reached zero
speed.
Is used for stall protection, as a standstill message
to the drive logic and for the generation of the Zero
Speed signal.
5.16
Wizard
Speed Level 1
Speed limit value for "Speed 1 reached" signal.
0 6500 0 rpm
Is used as "speed reached" message for the macros
5 / 6, field bus status Above Limit 1 and the
generation of the Speed L1 signal.
5.17
Wizard
Speed Level 2
Speed limit value for "Speed 2 reached" signal.
0 6500 0 rpm
Is used as "speed reached" message for macro 6
and the generation of the Speed L2 signal.
5.18 Overspeed Trip
100 125 115 %
Overspeed signal tripping value.
If the actual speed value exceeds the threshold
defined with this parameter the drive will switch off
with the fault message Overspeed (F18). Possible
causes for Overspeed are described in the chapter
Troubleshooting.
5.19 Jog Accel Ramp
0.0 3000.0 10.0 s x
Duration of the acceleration ramp for jogging in the
case of acceleration from 0 to maximum speed
(1.06).
Used for Fixed Speed 1 (5.13) or Fixed Speed 2
(5.14). Is also used for the macros 1 / 2 / 3 / 4 / 5 /
6 / 7.
5.20 Jog Decel Ramp
0.0 3000.0 10.0 s x
Duration of the deceleration ramp for jogging in the
case of deceleration from maximum speed (1.06) to
0.
Used for Fixed Speed 1 (5.13) or Fixed Speed 2
(5.14). Is used for the macro 1 / 2 / 5.
5.21 Alt Par Sel
0 8 2 Text
Selection of the alternative parameter set:
0 = disabled, i.e. standard parameter set
permanently selected
1 = enabled, i.e. alternative parameter set
permanently selected
2 = Macro depend / dependent on the selected
macro
3 = Sp < Lev1 /
4 = Sp < Lev2 /
5 = Sp Err<Lev1 /
6 = Sp Err<Lev2 /
*(7 = Sp Ref<Lev1 /
Actual speed < Speed level 1 (5.16)
Actual speed < Speed level 2 (5.17)
Speed error < Speed level 1 (5.16)
Speed error < Speed level 2 (5.17)
Speed ref. < Speed level 1 (5.16))
*(8 = Sp Ref<Lev2 /Speed ref. < Speed level 2 (5.17))
* not yet released
For items 2...8, the alternative parameter set is
selected in dependence on the defined event.
(1) no changes possible if the drive is in ON-status
custom.
setting
II K 4-57
Page 82

Overview of Software
ParNo. Parameter name and significance Min Max Default Unit (1)
Grp 5 Speed Controller (continued)
5.22 Alt Speed KP
Proportional gain of the speed controller
(PI controller) for the alternative parameter set.
5.23 Alt Speed TI
Integration time constant of the speed controller
(PI controller) in milliseconds for the alternative
parameter set.
5.24 Alt Accel Ramp
Duration of the acceleration ramp in the case of
acceleration from 0 to maximum speed (1.06) in
seconds for the alternative parameter set.
5.25 Alt Decel Ramp
Duration of the deceleration ramp in the case of
decelerationen from maximum speed (1.06) to 0 in
seconds for the alternative parameter set.
5.26 Aux Sp Ref Sel
Selection of the desired location for the auxiliary
speed reference value:
0 = Macro depend/ dependent on the selected
macro
1 = AI1 / analog input 1 (X2:1-2)
2 = AI2 / analog input 2 (X2:3-4)
3 = Bus Main Ref / main fieldbus reference value
4 = Bus Aux Ref / auxiliary fieldbus reference value
5 = Fixed Sp1 / fixed speed value 1 (5.13)
6 = Fixed Sp2 / fixed speed value 2 (5.14)
7 = Commis Ref1 / commissioning reference val. 1
8 = Commis Ref2 / commissioning reference val. 2
9 = Squarewave / square-wave generator
10 = Const Zero / constant zero speed
5.27 Drooping
Desired decrease in speed at nominal torque in %
related to the maximum speed (1.06).
Is usually used in slave drives, which are
temporarily speed-controlled in order to lower the
speed by a specific value in the case of increasing
load. The master is not influenced by the slave
when the slave is switching over to torque control.
This function will also used in drives with a
mechanical coupling which is not suited for torque
control.
5.28 Ref Filt Time
Filter time constant for smoothing speed reference
before the speed regulator.
5.29 Act Filt 1 Time
Filter time constant 1 for smoothing speed deviation
at the input of the speed regulator.
(1) no changes possible if the drive is in ON-status
0.000 19.000 0.200 integer
0.0 6553.5 5000.0 ms
0.0 3000.0 10.0 s x
0.0 3000.0 10.0 s x
0 10 0 Text x
0 10 0 %
0.00 10.00 0.00 s
0.00 10.00 0.00 s
custom.
setting
II K 4-58
Page 83

Overview of Software
(1)
ParNo. Parameter name and significance Min Max Default Unit (1)
Grp 5 Speed Controller (continued)
5.30 Act Filt 2 Time
Filter time constant 2 for smoothing speed deviation
at the input of the speed regulator.
5.31 Speed Lim Fwd
Speed reference limitation in forward direction. For
reason of safety, this settable limitation is
supplemented by an absolute, unchangeable
limitation to
5.32 Speed Lim Rev
Speed reference limitation in reverse direction. For
reason of safety, this settable limitation is
supplemented by an absolute, unchangeable
limitation to
5.33
Signal
5.34 Tacho Offset
Ramp In Act
Speed reference signal at Ramp Generator Input.
Shows the sum of Speed Ref + Aux Sp Ref.
Speed value greater than Max Speed (1.06) is
possible, a first limitation is done by ramp generator.
Eliminate speed offset at motor shaft and panel
display.
no changes possible if the drive is in ON-status
Max Speed (1.06).
Max Speed (1.06).
0.00 10.00 0.00 s
0 6500 6500 rpm x
-6500 0 -6500 rpm x
- - - rpm
-50.0 50.0 0.0 rpm
custom.
setting
II K 4-59
Page 84

Overview of Software
ParNo. Parameter name and significance Min Max Default Unit
Grp 6 Input / Output
6.01 AI1 Scale 100%
Scaling of analog input 1: input of a voltage value in
volts, which correspond to 100% reference.
6.02 AI1 Scale 0%
Scaling of analog input 1: input of a voltage value in
volts, which corresponds to 0% reference.
6.03 AI2 Scale 100%
Scaling of the analog input 2: input of a voltage value
in volts, which corresponds to 100%.
6.04 AI2 Scale 0%
Scaling of the analog input 2: input of a voltage value,
which corresponds to 0%.
6.05
Wizard
6.06
Wizard
AO1 Assign
Desired assignment of analog output 1:
0 = Macro depend/ dependent on the selected macro
1 = Speed Act / actual speed value (5.05)
2 = Speed Ref / speed reference value (5.04)
3 = Arm Volt Act / armature voltage actual value (3.03)
4 = Arm Cur Ref / armature current refer. val. (3.01)
5 = Arm Cur Act / armature current actual value (3.02)
6 = Power Act / actual power (3.21)
7 = Torque Act / torque actual value (3.23)
8 = Fld Cur Act / field current actual value (4.02)
9 = Dataset 3.2
10 = Dataset 3.3
11 = AI1 Act / Analogue Input 1 actual value (6.26)
12 = AI2 Act / Analogue Input 2 actual value (6.27)
13 = Ramp In Act / Speed ref. at ramp gen. input (5.33)
AO1 Mode
Selection of the desired operating mode of analog
output 1:
Long Parameter Menu
2.50 11.00 10.00 V
-1.00 1.00 0.00 V
2.50 11.00 10.00 V
-1.00 1.00 0.00 V
0 13 0 Text
0 1 0 Text
0 = bipolar -11V…0V…+11V
1 = unipolar 0V…+11V
6.07
Wizard
6.08
Wizard
6.09
Wizard
AO1 Scale 100%
Scaling of analog output 1:
Input of a voltage value in volts, which corresponds to
100% of the output signal.
AO2 Assign
Desired assignment of the analog output 2:
Assignment identical with AO1 (6.05).
AO2 Mode
Selection of the desired operating mode of analog
output 2:
0.00 11.00 10.00 V
0 13 0 Text
0 1 0 Text
0 = bipolar -11V…0V…+11V
1 = unipolar 0V…+11V
6.10
Wizard
AO2 Scale 100%
Scaling of analog output 2:
input of a voltage value in volts, which corresponds to
100% of the output signal.
0.00 11.00 10.00 V
(1) no changes possible if the drive is in ON-status
(1)
custom.
setting
II K 4-60
Page 85

Overview of Software
ParNo. Parameter name and significance Min Max Default Unit (1)
Grp 6 Input / Output (continued)
6.11
Wizard
DO1 Assign
Desired assignment of digital output 1:
0 = none
1 = Constant 1
2 = Macro depend
3 = Rdy for On
4 = Rdy for Run
5 = Running
6 = Not Eme Stop
7 = Fault
8 = Alarm
9 = Flt or Alarm
10 = Not (F or A)
11 = Main Cont On
12 = Fan On
13 = Local
14 = Comm Fault
15 = Overtemp Mot
16 = Overtemp DCS
17 = Stalled
18 = Forward
19 = Reverse
20 = Zero Speed
21 = Speed > Lev1
22 = Speed > Lev2
23 = Overspeed
24 = At Set Point
25 = Cur at Limit
26 = Cur Reduced
27 = Bridge 1
28 = Bridge 2
29 = Field Reverse
30 = Arm Cur > Lev
31 = Field Cur ok
32 = SpeedMeasFlt
33 = MainsVoltLow
34…63 = Reserved
64 = Dataset 3.1
0 constant (for test purposes)
1 constant (for test purposes)
the output is defined by macro, see macro
description.
Ready for ON Command. The electronic
supply is switched on, there are no faults.
but the drive is still switched OFF (ON=0).
Ready for RUN Command. Drive is ON
(ON=1) but not yet enabled (RUN=0).
Main contactor, fan and field supply are
switched on.
The drive is enabled (RUN=1).
No emergency stop.
A fault has occurred
A warning has been output.
Summary alarm. A fault has occurred OR
a warning has been output.
Summary alarm as above, but inverted.
Control signal to switch ON the main
contactor. Main Cont On depends on ON
command.
Control signal to switch ON the fan. Fan
On depends on ON command.
The drive is controlled LOCALly from the
control panel or the PC tool.
The communication between PLC and the
drive is faulty.
The motor overtemperature protection has
occured (PTC to AI2) - depends on PTC
Mode (2.12).
The converter overtemperature protection
has occured (Alarm or Fault).
The motor is stalled.
The motor is rotating clockwise - only valid
if speed actual >
The motor is rotating counter-clockwise only valid if speed actual >
Lev (5.15)
Standstill message, speed actual <
Speed Lev (5.15).
Speed 1 reached, speed actual > or equal
Speed Level 1 (5.16).
to
Speed 2 reached, speed actual > or equal
Speed Level 2 (5.17).
to
Overspeed, speed actual > or equal to
Overspeed Trip (5.18).
Speed reference reaches reference value
before the ramp corresponding to actual
value.
Armature current is being limited, value of
Arm Cur Max (3.04)
Reduced armature current, recovery
current after high current dosage s. chap.
4.5.5.
Bridge 1 is active; only valid if RUN=1.
Bridge 2 is active; only valid if RUN=1.
Field reversal is active.
Armature current actual > Arm Cur Lev
(3.25)
Field current actual is okay. Is in a range
between Fld Ov Cur Trip (4.05) and Field
Low Trip (4.06)
Speed measurement fault. The
comparison of the speed feed back signal
from tacho generator or pulse encoder has
failed or overflow of analogue input AITAC
Warning, main supply is too low
respectively is not in accordance with Arm
Volt Nom (1.02). See also Table 2.2/4 and
chapter 4.5.1 Monitoring the Mains
Voltage
not used
DO is controlled by Dataset 3.1
Zero speed Lev (5.15)
.
has been reached
0 64 2 Text
.
Zero speed
Zero
.
(1) no changes possible if the drive is in ON-status
custom.
setting
II K 4-61
Page 86

Overview of Software
ParNo. Parameter name and significance Min Max Default Unit (1)
Grp 6 Input / Output (continued)
6.12
Wizard
6.13
Wizard
6.14
Wizard
6.15
Wizard
6.16 Panel Act 1
6.17 Panel Act 2
6.18 Panel Act 3
6.19 Panel Act 4
(1) no changes possible if the drive is in ON-status
DO2 Assign
esired assignment of digital output 2:
D
Assignment identical with DO1 (6.11).
DO3 Assign
Desired assignment of digital output 3:
Assignment identical with DO1 (6.11).
DO4 Assign
Desired assignment of digital output 4:
Assignment identical with DO1 (6.11).
DO5 Assign
Desired assignment of digital output 5:
(relay X98:1-2):
Assignment identical with DO1 (6.11).
Selection of the desired panel display of actual
value 1:
(top left corner of display)
0 = Speed Act / speed actual value (5.05)
1 = Speed Ref / speed reference value (5.04)
2 = Arm Volt Act / armature voltage act. value (3.03)
3 = Arm Cur Ref / armature current ref. (3.01)
4 = Arm Cur Act / armature current act. value (3.02)
5 = Power Act / actual power (3.21)
6 = Torque Act / torque actual value (3.23)
7 = Fld Cur Act / field current actual value (4.02)
8 = AI1 Act / Analogue Input 1 actual value (6.26)
9 = AI2 Act / Analogue Input 2 actual value (6.27)
10 = DI Act / Actual value DI1…8 (6.28)
11 = Ramp In Act / Speed ref. at ramp gen. input (5.23)
Selection of the desired panel display of actual
value 2:
(top centre of display)
Assignment identical with Panel Act 1 (6.16)
Selection of the desired panel display of actual
value 3:
(top right corner of display)
Assignment identical with Panel Act 1 (6.16)
Selection of the desired panel display of actual
value 4:
(bottom of display)
Assignment identical with Panel Act 1 (6.16)
0 64 2 Text
0 64 2 Text
0 64 2 Text
0 64 2 Text
0 11 2 Text
0 11 4 Text
0 11 1 Text
0 11 0 Text
custom.
setting
II K 4-62
Page 87

Overview of Software
ParNo. Parameter name and significance Min Max Default Unit (1)
Grp 6 Input / Output (continued)
6.20 Dataset 2.2 Asn
Selection of the desired assignment for fieldbus
dataset 2.2:
0 = Speed Act / speed actual value (5.05)
1 = Speed Ref / speed reference value (5.04)
2 = Arm Volt Act / armature voltage act. value (3.03)
3 = Arm Cur Ref / armature current ref. val. (3.01)
4 = Arm Cur Act / armature current act. value (3.02)
5 = Power Act / actual power (3.21)
6 = Torque Act / torque actual value (3.23)
7 = Fld Cur Act / field current actual value (4.02)
8 = Dataset 3.2
9 = Dataset 3.3
10 = AI1 Act / Analogue Input 1 actual value (6.26)
11 = AI2 Act / Analogue Input 2 actual value (6.27)
12 = Ramp In Act / Speed ref. at ramp gen. input (5.33)
6.21 Dataset 2.3 Asn
Selection of the desired assignment for fieldbus
dataset 2.3:
Assignment identical with Dataset 2.2 Asn (6.20)
0 12 0 Text
0 12 4 Text
(1) no changes possible if the drive is in ON-status
custom.
setting
II K 4-63
Page 88

Overview of Software
ParNo. Parameter name and significance Min Max Default Unit (1)
Grp 6 Input / Output (continued)
MSW Bit 11 Asn
6.22
0 67 2 Text
Function assignement for bit 11 in the main fieldbus
status word (2.06):
0 = none
1 = Constant 1
2 = Macro depend
3 = Rdy for O n
4 = Rdy for R un
5 = Running
6 = Not Eme Stop
7 = Fault
8 = Alarm
9 = Flt or A larm
10 = Not (F or A)
11 = Main Cont On
12 = Fan On
13 = Local
14 = Comm Fault
15 = Overtem p Mot
16 = Overtemp DCS
17 = Stalled
18 = Forward
19 = Reverse
20 = Zero Speed
21 = Speed > Lev1
22 = Speed > Lev2
23 = Overspeed
24 = At Set Point
25 = Cur at Limit
26 = Cur Redu ced
27 = Bridge 1
28 = Bridge 2
29 = Field Reverse
30 = Arm Cur > Lev
31 = Field Cur ok
32 = SpeedMeasFlt
33 = MainsVoltLow
34…63 = Reserved
64 = DI1
65 = DI2
66 = DI3
67 = DI4
0 constant (for test purposes)
1 constant (for test purposes)
the output is defined by macro, see macro
description.
Ready for ON Command. The electronic
supply is switched on, there are no faults.
but the drive is still switched OFF (ON=0).
Ready for RU N Command. Drive is ON
(ON=1) but not yet enabled (RUN=0).
Main contactor, fan and field supply are
switched on.
The drive is enabled (RUN=1).
No emergency stop.
A fault has occurred
A warning has been output.
Summary alarm. A fault has occurred OR
a warning has been output.
Summary alarm as above, but inverted.
Control signal to switch ON the main
contactor. Main Cont On depends on ON
command.
Control signal to switch ON the fan. Fan
On depends on ON command.
The drive is controlled LOCALly from the
control panel or the PC tool.
The communication between PLC and the
drive is faulty.
The motor overtemperature protection has
occured (PTC to AI2) - depends on PTC
Mode (2.12).
The converter overtemperature protection
has occured (Alarm or Fault).
The motor is stalled.
The motor is rotating clockwise - only valid
if speed actual >
The motor is rotating counter-clockwise only valid if speed actual >
Lev (5.15)
Standstill message, speed actual <
Speed Lev (5.15).
Speed 1 reached, speed actual > or equal
Speed Level 1 (5.16).
to
Speed 2 reached, speed actual > or equal
Speed Level 2 (5.17).
to
Overspeed, speed actual > or equal to
Overspeed Trip (5.18).
Speed reference reaches reference value
before the ramp corresponding to actual
value.
Armature current is being limited, value of
Arm Cur Max (3.04)
Reduced armature current, recovery
current after high current dosage s. chap.
4.5.5.
Bridge 1 is active; only valid if RUN=1.
Bridge 2 is active; only valid if RUN=1.
Field reversal is active.
Armature current actual > Arm Cur Lev
(3.25)
Field current actual is okay. Is in a range
between Fld Ov Cur Trip (4.05) and Field
Low Trip (4.06)
Speed measurement fault. The
comparison of the speed feed back signal
from tacho generator or pulse encoder has
failed or overflow of analogue input AITAC
Warning, main supply is too low
respectively is not in accordance with Arm
Volt Nom (1.02). See als o Table 2.2/4 and
chapter 4.5.1 Monitoring the Mains
Voltage
not used
actual state of Digital Input 1
actual state of Digital Input 2
actual state of Digital Input 3
actual state of Digital Input 4
Zero speed Lev (5.15)
.
has been reached
Zero speed
Zero
.
.
(1) no changes possible if the drive is in ON-status
custom.
setting
II K 4-64
Page 89

Overview of Software
ParNo. Parameter name and significance Min Max Default Unit (1)
Grp 6 Input / Output (continued)
6.23 MSW Bit 12 Asn
0 67 2 Text
Function assignment for bit 12 in the main fieldbus
status word (2.06):
Assignment identical with MSW Bit 11 Asn (6.22)
6.24 MSW Bit 13 Asn
0 67 2 Text
Function assignment for bit 13 in the main fieldbus
status word (2.06):
Assignment identical with MSW Bit 11 Asn (6.22)
6.25 MSW Bit 14 Asn
0 67 2 Text
Function assignment for bit 14 in the main fieldbus
status word (2.06):
Assignment identical with MSW Bit 11 Asn (6.22)
6.26
Signal
6.27
Signal
6.28
Signal
AI1 Act
Reference display of analogue input 1
AI2 Act
Reference display of analogue input 2
DI Act
Status display of the eight digital inputs
- - - %
- - - %
- - - hex
(1) no changes possible if the drive is in ON-status
custom.
setting
II K 4-65
Page 90

Overview of Software
ParNo. Parameter name and significance Min Max Default Unit
Grp 7 Maintenance
7.01
Wizard
7.02
Action
Language
Selection of the panel language:
0 = English
1 = Deutsch
2 = Français
3 = Italiano
4 = Español
Contr Service
Selection of the desired service activity:
0 = None
1 = Arm Autotun / armature current controller auto tuning
2 = Fld Autotun / field current controller autotuning
3 = Flux Adapt / flux adaptation
4 = Sp Autotun / speed controller autotuning
5 = Arm Man Tun / armature current controller
manual tuning (not yet released)
6 = Fld Man Tun / field current controller
manual tuning
7 = Thyr Diag / thyristor diagnosis
040Text
070Text
(1) no changes possible if the drive is in ON-status
(1)
custom.
setting
II K 4-66
Page 91

Overview of Software
ParNo. Parameter name and significance Min Max Default Unit
Grp 7 Maintenance (continued)
7.03
Signal
Diagnosis
Display of all diagnostic messages:
---Text
Further information see chapter ’Troubleshooting’
0 = none
1…10 = 1…10 (internal software causes)
11 = Tune Aborted
12 = No Run Cmd
13 = No ZeroSpeed
14 = Fld Cur <> 0
15 = Arm Cur <> 0
16 = Arm L Meas
17 = Arm R Meas
18 = Field L Meas
19 = Field R Meas
20 = TuneParWrite
21 = 21 (internal software causes)
22 = Tacho Adjust
23 = Not Running
24 = Not At Speed
25 = TachPolarity
26 = Enc Polarity
27 = No EncSignal
28 = StillRunning
29 = 29 (internal software causes)
30 = Wiz ParWrite
31 = 31 (internal software causes)
32 = UpDn Aborted
33 = reserved
34 = Par Checksum
35 = 35 (internal software causes)
36 = 36 (internal software causes)
37…69 = reserved
70 = Fld Low Lim
71 = Flux Char
72 = Field Range
73 = Arm Data
7.04
Const.
7.05
Const.
74
75 = RecoveryTime
76 = Grp9 Disable
77…79 = reserved
80 = Speed does not reach setpoint
81 = Motor is not accelerating
82 = Not enough measurement for speed KP and TI
83…89 = reserved
90 = Shortcut V11
91 = Shortcut V12
92 = Shortcut V13
93 = Shortcut V14
94 = Shortcut V15
95 = Shortcut V16
96 = Result False
97 = ShortcV15/22
98 = ShortcV16/23
99 = ShortcV11/24
100 = ShortcV12/25
101 = ShortcV13/26
102 = ShortcV14/21
103 = Ground Fault
104 = NoThrConduc
SW Version
Display of the DCS 400 software version used.
Conv Type
Display of the converter type:
= AI2 vs PTC
---integer
---Text
0 = DCS401 (2Q)
1 = DCS402 (4Q)
2 = DCS401 Rev A (2Q)
3 = DCS402 Rev A (4Q)
(1) no changes possible if the drive is in ON-status
(1)
custom.
setting
II K 4-67
Page 92

Overview of Software
ParNo. Parameter name and significance Min Max Default Unit
Grp 7 Maintenance (continued)
7.06
Const.
7.07
Const.
7.08
Signal
7.09
Signal
Conv Nom Cur
Display of the converter’s nominal current in amperes.
Conv Nom Volt
Display of the converter’s nominal voltage in volts.
Volatile Alarm
Display of the last alarm.
Fault Word 1
All the pending faults are displayed if the
---A
---V
---Text
- - - hex
corresponding bits are set to log. "1".
Bit hex Fault definition
00 0001 01 Aux Voltage Fault
01 0002 02 Hardware Fault
02 0004 03 Software Fault
03 0008 04 Par Flash Read Fault
04 0010 05 Compatibility Fault
05 0020 06 Typecode Read Fault
06 0040 07 Converter Overtemp
07 0080 08 Motor Overtemp
08 0100 09 Mains Undervoltage
09 0200 10 Mains Overvoltage
10 0400 11 Mains Sync Fault
11 0800 12 Field Undercurrent
12 1000 13 Field Overcurrent
13 2000 14 Armature Overcurrent
14 4000 15 Armature Overvoltage
15 8000 16 Speed Meas Fault
7.10
Signal
Fault Word 2
Fault word 2. Significance of the individual bits:
- - - hex
All the pending faults are displayed if the
corresponding bits are set to log. "1".
Bit hex Fault definition
00 0001 17 Tacho Polarity fault
01 0002 18 Overspeed
02 0004 19 Motor Stalled
03 0008 20 Communication Fault
04 0010 21 Local Control Lost
05 0020 22 External Fault
06 0040 23 07 0080 24 08 0100 25 09 0200 26 10 0400 27 11 0800 28 12 1000 29 13 2000 30 14 4000 31 15 8000 32 -
7.11
Signal
Fault Word 3
Fault word 3. Significance of the individual bits:
- - - hex
All the pending faults are displayed if the
corresponding bits are set to log. "1".
Bit hex Fault definition
00 0001 33 01 0002 34 02 0004 35 03 0008 36 04 0010 37 05 0020 38 06 0040 39 07 0080 40 08 0100 41 09 0200 42 10 0400 43 11 0800 44 12 1000 45 13 2000 46 14 4000 47 15 8000 48 -
(1) no changes possible if the drive is in ON-status
(1)
custom.
setting
II K 4-68
Page 93

Overview of Software
ParNo. Parameter name and significance Min Max Default Unit
Grp 7 Maintenance (continued)
7.12
Signal
Alarm Word 1
Alarm word 1. Significance of the individual bits:
- - - hex
All the pending alarms are displayed if the
corresponding bits are set to log. "1".
Bit hex Alarm definition
00 0001 01 Parameters Added
01 0002 02 Mains Voltage Low
02 0004 03 Arm Circuit Break
03 0008 04 Converter Temp High
04 0010 05 Motor Temp High
05 0020 06 Arm Current Reduced
06 0040 07 Field Volt Limited
07 0080 08 Mains Drop Out
08 0100 09 Eme Stop Pending
09 0200 10 Autotuning Failed
10 0400 11 Comm Interrupt
11 0800 12 External Alarm
12 1000 13 ill Fieldbus Setting
13 2000 14 Up/Download Failed
14 4000 15 PanTxt Not UpToDate
15 8000 16 Par Setting Conflict
7.13
Signal
Alarm Word 2
Alarm word 2. Significance of the individual bits:
- - - hex
All the pending alarms are displayed if the
corresponding bits are set to log. "1".
Bit hex Alarm definition
00 0001 17 Compatibility Alarm
01 0002 18 Parameter restored
02 0004 19 03 0008 20 04 0010 21 05 0020 22 06 0040 23 07 0080 24 08 0100 25 09 0200 26 10 0400 27 11 0800 28 12 1000 29 13 2000 30 14 4000 31 15 8000 32 -
7.14
Signal
Alarm Word 3
Alarm word 3. Significance of the individual bits:
- - - hex
All the pending alarms are displayed if the
corresponding bits are set to log. "1".
Bit hex Alarm definition
00 0001 33 01 0002 34 02 0004 35 03 0008 36 04 0010 37 05 0020 38 06 0040 39 07 0080 40 08 0100 41 09 0200 42 10 0400 43 11 0800 44 12 1000 45 13 2000 46 14 4000 47 15 8000 48 -
(1) no changes possible if the drive is in ON-status
(1)
custom.
setting
II K 4-69
Page 94

Overview of Software
ParNo. Parameter name and significance Min Max Default Unit
Grp 7 Maintenance (continued)
7.15 Commis Ref 1
Commissioning reference value 1
-32768 32767 0 integer
Scaling:
Field current 0…100% = 0…4096
Torque 0…100%= 0…4096
Armature current 0…100%= 0…4096
Speed 0…max = 0…max rpm
7.16 Commis Ref 2
Commissioning reference value 2
-32768 32767 0 integer
Scaling:
Field current 0…100% = 0…4096
Torque 0…100%= 0…4096
Armature current 0…100%= 0…4096
Speed 0…max = 0…max rpm
7.17 Squarewave Per
Duration of cycle of the square-wave generator.
7.18
Signal
7.19
Signal
7.20
Signal
7.21
Signal
Squarewave Act
Actual value of the square-wave generator.
Pan Text Vers
Display of text version in the control panel
CPU Load
Operating performance of CPU in %
Con-Board
Signal which Controller Board SDCS-CON-3 is in
0.01 60.00 2.00 s
- - - integer
integer
%
- - - Text
use.
0 = CON-3A
1..15 = unused
16 = CON-3
(1) no changes possible if the drive is in ON-status
(1)
custom.
setting
II K 4-70
Page 95

For detailed description see "Fieldbus Description"
Overview of Software
ParNo.
Parameter name and significance
Grp 8 Fieldbus
Long Parameter Menu
8.01 Fieldbus Par 1
0 = Disable
no communication with PLC
1 = Fieldbus
PLC communication via fieldbus adapter
2 = RS232-Port
PLC communication via RS232 Port / Modbus
protocol
3 = Panel-Port
PLC communication via Panel Port / Modbus
protocol
4 = Res Fieldbus
Reset all fieldbus parameter (8.01...8.16) to zero
8.02 Fieldbus Par 2
further information see chapter 7
8.03 Fieldbus Par 3
further information see chapter 7
8.04 Fieldbus Par 4
further information see chapter 7
8.05 Fieldbus Par 5
further information see chapter 7
8.06 Fieldbus Par 6
further information see chapter 7
8.07 Fieldbus Par 7
further information see chapter 7
8.08 Fieldbus Par 8
further information see chapter 7
8.09 Fieldbus Par 9
further information see chapter 7
8.10 Fieldbus Par 10
further information see chapter 7
8.11 Fieldbus Par 11
further information see chapter 7
8.12 Fieldbus Par 12
further information see chapter 7
8.13 Fieldbus Par 13
further information see chapter 7
8.14 Fieldbus Par 14
further information see chapter 7
8.15 Fieldbus Par 15
further information see chapter 7
8.16 Fieldbus Par 16
further information see chapter 7
(1) no changes possible if the drive is in ON-status
Min Max Default Unit (1)
0 4 0 Text
0 65535 0 integer
0 65535 0 integer
0 65535 0 integer
0 65535 0 integer
0 65535 0 integer
0 65535 0 integer
0 65535 0 integer
0 65535 0 integer
0 65535 0 integer
0 65535 0 integer
0 65535 0 integer
0 65535 0 integer
0 65535 0 integer
0 65535 0 integer
0 65535 0 integer
custom.
setting
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
II K 4-71
Page 96

Overview of Software
ParNo. Parameter name and significance Min Max Default Unit
Grp 9 Macro Adaptation
Long Parameter Menu
9.01 MacParGrpAction
Before a new function can be assigned to a digital input
or control bit, the actual function has to be disabled. This
can be done in two ways. With par. 9.01 the function of all
assigned parameters 9.02...9.20 can be preset to disable.
The same can be achieved by setting the parameters
9.02...9.20 individually.
0=unchanged no parameters changes
1=Macro depend set parameters 9.02...9.20 to macro depend
2=Disable set parameters 9.02...9.20 to disable
0 2 0 Text x
Macro adaptation not possible for Macro 2, 3, 4
9.02 Jog 1
Jog function will be controlled from a binary signal which
is assigned in this parameter:
0=Macro depend
1=Disable
2=DI1
3=DI2
4=DI3
5=DI4
State of binary signal:
0=no Jog 1
1=Jog 1
Jog 1 function can also be controlled by bit 8 of Main
Control Word via serial communication - depending on
Cmd Location (2.02)
9.03 Jog 2
Jog function will be controlled from a binary signal which
is assigned in this parameter.
Assignment identical with 9.02
State of binary signal:
0=no Jog 2
1=Jog 2
Jog 2 unction can also be controlled by bit 8 of Main
Control Word via serial communication - depending on
Cmd Location (2.02)
9.04 COAST
Coast function will be controlled from a binary signal
which is assigned in this parameter.
Assignment identical with 9.02
Only effective if
State of binary signal:
0=COAST
1=no COAST
Decelerate the motor by using Jog Decel Ramp
(5.20) till zero speed afterwards disable of
current controller .
enable current controller and accelerate the
motor by using Jog Acel Ramp (5.19) up to
Fixed Speed 1 (5.13)
.
Decelerate the motor by using Jog Decel Ramp
(5.20) till zero speed afterwards disable of
current controller .
enable current controller and accelerate the
motor by using Jog Acel Ramp (5.19) up to
Fixed Speed 2 (5.14)
.
Panel or PC tool
disable current controller, switch Main
Contactor Off, motor is coasting till zero
speed
Closed-circuit principle, must be closed for
operation
is not in LOCal Mode.
0 5 0 Text x
0 5 0 Text x
0 5 0 x
The Coast function is also controlled by bit 1 of Main
Control Word via serial communication.
(1) no changes possible if the drive is in ON-status
(1)
custom.
setting
II K 4-72
Page 97

Overview of Software
ParNo. Parameter name and significance Min Max Default Unit
Grp 9 Macro Adaptation (continued)
9.05 User Fault
Fault function will be controlled from a binary signal
which is assigned in this parameter:
0=Macro depend
1=Disable
2=DI1
3=DI2
4=DI3
5=DI4
6=MCW Bit 11
7=MCW Bit 12
8=MCW Bit 13 effective independent of Cmd
9=MCW Bit 14 Location (2.02)
10=MCW Bit 15
State of binary signal:
0=no Fault
1=Fault Triggers an External Fault (F22) and
trips the drive
9.06 User Fault Inv
Fault (inv) function will be controlled from binary signal
which is assigned in this parameter:
Assignment identical with 9.02
State of binary signal:
0=Fault Triggers an External Fault (F22) and
trips the drive
1=no fault Closed-circuit principle, must be
closed for operation
9.07 User Alarm
Alarm function will be controlled from binary signal
which is assigned in this parameter:
Assignment identical with 9.05
0 10 0 Text x
0 5 0 Text x
0 10 0 Text x
(1)
custom.
setting
State of binary signal:
0=no Alarm
1=Alarm Triggers an External Alarm (A12) in
DCS400
9.08 User Alarm Inv
Alarm (inv) function will be controlled from binary
signal which is assigned in this parameter:
Assignment identical with 9.02
State of binary signal:
0=Alarm Triggers an External Alarm (A12) in
DCS400
1=no Alarm Closed-circuit principle, must be
closed for operation
9.09 Dir of Rotation
Direction of rotation will be controlled from binary
signal which is assigned in this parameter:
Assignment identical with 9.05
State of binary signal:
0=forward
1=reverse
Effective only when the drive is speed controlled.
(1) no changes possible if the drive is in ON-status
0 5 0 Text x
0 10 0 Text x
II K 4-73
Page 98

Overview of Software
ParNo. Parameter name and significance Min Max Default Unit
Grp 9 Macro Adaptation (continued)
9.10 MotPot Incr
MotorPot Increase speed function will be controlled
from a binary signal which is assigned in this
parameter.
Assignment identical with 9.05
only effective if MotPot Decr (9.11) is not set to
1 = Disable
State of binary signal:
0=hold speed
1=increase speed
accelerate speed at Acel Ramp (5.09 ) until
Max Speed (1.06)
9.11 MotPot Decr
MotorPot Decrease speed function will be controlled
from a binary signal which is assigned in this
parameter.
Assignment identical with 9.05
State of binary signal:
0=hold speed
1=decrease speed
decelerate speed at Decel Ramp (5.10) until
zero speed respectively MotPotMinSpeed (9.12)
if active. MotPot Decr has precedence
above MotPot Incr
9.12 MotPotMinSpeed
MotorPot minimum speed function will be controlled
from a binary signal which is assigned in this
parameter.
Assignment identical with 9.05
only effective if MotPot Decr (9.11) is not set to
1 = Disable
0 10 0 Text x
0 10 0 Text x
0 10 0 Text x
(1)
custom.
setting
State of binary signal:
0=Start from zero.
MotPotMinSpeed is inactive.
1=Start from MotPotMinSpeed
activate MinimumSpeed. Speed can be
defined in parameter Fixed Speed 1 (5.13).
When the drive is started the speed will be
accelerated to this minimum speed and it is
not possible to set the speed below this
minimum with motor pot function.
9.13 Ext Field Rev
External field reversal will be controlled from a binary
signal which is assigned in this parameter.
Assignment identical with 9.05
State of binary signal:
0=no field reversal
1=field reversal
External field reversal with external field
reversing switch. Only for 2-Q application.
Depend on field reversal the signal „Field
reversal active“ has log. state „1“.
Field reversal is only possible when the
drive is OFF (DI7=0). When field reversal is
active the polarity of speed actual value is
changed in the software. It’s recommended
to use a remanence contactor relay to store
the state of this relay when the main supply
failes. Otherwise the relay contactors can
burn due to the field inductance.
(1) no changes possible if the drive is in ON-status
0 10 0 Text x
II K 4-74
Page 99

Overview of Software
(1)
ParNo. Parameter name and significance Min Max Default Unit
Grp 9 Macro Adaptation (continued)
9.14 AlternativParam
0 10 0 Text x
Alternative parameter set will be controlled from a
binary signal which is assigned in this parameter.
Assignment identical with 9.05
State of binary signal:
0= Standard parameter set for speed controller effective
1= IF Alt Par Sel (5.21) = Macro depend
9.15 Ext Speed Lim
5.07 Speed Reg KP
5.08 Speed Reg TI
5.09 Accel Ramp
5.10 Decel Ramp
THEN
alternativ parameter set for speed controller
effective
5.22 Alt Speed KP
5.23 Alt Speed TI
5.24 Alt Accel Ramp
5.25 Alt Decel Ramp
ELSE
alternativ parameter set for speed controller
effective depending on an event selected in Alt
Par Sel (5.21)
0 10 0 Text x
External speed limitation will be controlled from a
binary signal which is assigned in this parameter.
Assignment identical with 9.05
State of binary signal:
0=no speed limitation
1=speed limitation to parameter Fixed Speed 1 (5.13)
9.16 Add AuxSpRef
0 10 0 Text x
Additional aux speed reference will be controlled from
a binary signal which is assigned in this parameter.
Assignment identical with 9.05
State of binary signal:
0=no additional aux. speed reference
1= IF Aux Sp Ref Sel (5.26) = Macro depend
THEN
value of Fixed Speed 2 (5.14) is added to
speed reference.
ELSE
value in Aux Sp Ref Sel (5.26) is added to
speed reference.
9.17 Curr Lim 2 Inv
0 10 0 Text x
Second current limitation will be controlled from a
binary signal which is assigned in this parameter.
Assignment identical with 9.05
State of binary signal:
0=current limitation 2 effective (3.24 Arm Cur Lim 2)
1=current limitation 1 effective (3.04 Arm Cur Max)
Value of Arm Cur Max (3.04) has to be greater
than value of Arm Cur Lim 2 (3.24).
9.18 Speed/Torque
0 10 0 Text x
Speed/torque function will be controlled from a binary
signal which is assigned in this parameter.
Assignment identical with 9.05
State of binary signal:
0= drive is speed controlled
1= IF Cur Contr Mode (3.14) = Macro depend
THEN
drive is torque controlled
ELSE
drive is controlled as selected in Cur Contr
Mode (3.14)
no changes possible if the drive is in ON-status
(1)
custom.
setting
II K 4-75
Page 100

Overview of Software
ParNo. Parameter name and significance Min Max Default Unit
Grp 9 Macro Adaptation (continued)
9.19 Disable Bridge1
Bridge 1 will be controlled from binary signal which is
assigned in this parameter.
Assignment identical with 9.05
State of binary signal:
0= Enable Bridge 1
1= Disable Bridge 1. Set affected Torque Ref to zero.
9.20 Disable Bridge2
Bridge 2 will be controlled from binary signal which is
assigned in this parameter.
Assignment identical with 9.05
State of binary signal:
0= Enable Bridge 2
1= Disable Bridge 2. Set affected Torque Ref to zero.
0 10 0 Text x
0 10 0 Text x
(1) no changes possible if the drive is in ON-status
(1)
custom.
setting
II K 4-76
 Loading...
Loading...