


P1000
Table of contents
 Loading...
Loading...
YASKAWA AC Drive P1000
AC Drive Bypass for Inustrial Fans and Pumps
Technical Manual
Type: P1B
Models:
To properly use the product, read this manual thoroughly and retain
for easy reference, inspection, and maintenance. Ensure the end user
receives this manual.
208 V: 1/2 to 100 HP
480 V: 3/4 to 500 HP
Receiving
Mechanical Installation
Electrical Installation
Start-Up Programming & Operation
Programming
Diagnostics & Troubleshooting
Periodic Inspection & Maintenance
Specifications
Parameter List
BACnet Communications
MEMOBUS/Modbus Communications
1
2
3
4
5
6
7
A
B
C
D
MANUAL NO. SIEP YAIP1B 01A
Standards Compliance
Apogee FLN Network Protocol
Metasys N2 Network Protocol
Quick Reference Sheet
E
F
G
H

Copyright © 2014 YASKAWA AMERICA, INC. All rights reserved.
No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in any form or by any means,
mechanical, electronic, photocopying, recording, or otherwise, without the prior written permission of Yaskawa. No patent
liability is assumed with respect to the use of the information contained herein. Moreover, because Yaskawa is constantly
striving to improve its high-quality products, the information contained in this manual is subject to change without notice.
Every precaution has been taken in the preparation of this manual. Yaskawa assumes no responsibility for errors or omissions.
Neither is any liability assumed for damages resulting from the use of the information contained in this publication.
Table of Contents
i. PREFACE & GENERAL SAFETY.................................................................. 13
i.1 Preface ....................................................................................................................... 14
Product Description................................................................................................................. 14
Applicable Documentation....................................................................................................... 14
Symbols................................................................................................................................... 15
Terms and Abbreviations ........................................................................................................ 15
Trademarks ............................................................................................................................. 15
i.2 General Safety ........................................................................................................... 16
Supplemental Safety Information ............................................................................................ 16
Safety Messages.....................................................................................................................17
General Application Precautions............................................................................................. 18
Motor Application Precautions................................................................................................. 20
Drive Label Warning Example................................................................................................. 22
Bypass Label Warning Example ............................................................................................. 23
Warranty Information...............................................................................................................24
1. RECEIVING .................................................................................................... 25
1.1 Section Safety............................................................................................................ 26
1.2 General Description .................................................................................................. 27
Control Mode Details...............................................................................................................27
1.3 Model Numbers and Nameplate Checks ................................................................. 28
Drive Nameplate...................................................................................................................... 28
Bypass Nameplate .................................................................................................................. 29
Bypass Enclosures..................................................................................................................31
Bypass Product Options..........................................................................................................31
1.4 Bypass Component Descriptions............................................................................ 32
Bypass Front Control Panel .................................................................................................... 32
Front Views ............................................................................................................................. 33
2. MECHANICAL INSTALLATION..................................................................... 35
2.1 Section Safety............................................................................................................ 36
2.2 Mechanical Installation ............................................................................................. 38
Installation Environment.......................................................................................................... 38
3. ELECTRICAL INSTALLATION ...................................................................... 39
3.1 Section Safety............................................................................................................ 40
3.2 Standard Connection Diagram................................................................................. 42
YASKAWA
SIEP YAIP1B 01A YASKAWA AC Drive – P1000 Bypass Technical Manual
3

Table of Contents
3.3 Main Circuit Wiring..............................................................................................................43
Factory Recommended Branch Circuit Protection ............................................................................ 43
Drive Main Circuit Terminal Functions .............................................................................................. 43
Wire Gauge and Tightening Torque Specifications........................................................................... 43
Main Input Circuit and Motor Wiring.................................................................................................. 43
Wiring the Main Input Circuit ............................................................................................................. 45
3.4 Control Circuit Wiring .........................................................................................................46
Electronic Bypass Control Terminal Board A2 .................................................................................. 46
Bypass Analog Outputs..................................................................................................................... 47
Serial Communications ..................................................................................................................... 48
Drive Cover Removal ........................................................................................................................ 49
Wiring the Drive Control Circuit Terminal .......................................................................................... 50
Switches and Jumpers on the Terminal Board.................................................................................. 51
3.5 Bypass and Drive Control I/O Connections......................................................................52
Terminals A1, A2, and A3 Input Signal Selection.............................................................................. 52
Terminal FM/AM Signal Selection..................................................................................................... 52
3.6 External Interlock ................................................................................................................54
Annunciation Contact Outputs........................................................................................................... 54
Building Automation System Run/Stop Circuit .................................................................................. 54
Safety Interlock Circuit ...................................................................................................................... 54
Building Automation System Interlock Circuit (Drive and Bypass Enable Input)............................... 54
Remote Transfer to Bypass............................................................................................................... 55
Smoke Purge Operation.................................................................................................................... 55
Spare Multi-Function Digital Inputs ................................................................................................... 55
4. START-UP PROGRAMMING & OPERATION....................................................... 57
4.1 Section Safety......................................................................................................................58
4.2 Using the HOA Keypad .......................................................................................................59
HOA Keypad Keys and Displays....................................................................................................... 59
LCD Display ...................................................................................................................................... 60
Bypass Control Board LEDs.............................................................................................................. 62
ALARM (ALM) LED Displays............................................................................................................. 62
AUTO LED and HAND LED Indications............................................................................................ 62
HOA Keypad Menu Structure............................................................................................................ 64
HOA Keypad Parameter Display (Drive Off) ..................................................................................... 64
4.3 The Drive and Programming Modes..................................................................................66
Changing Parameter Settings or Values........................................................................................... 66
Verifying Parameter Changes: Modified Constants .......................................................................... 67
Simplified Setup Using the Quick Setting Group............................................................................... 68
4.4 Powering Up the Drive ........................................................................................................70
Powering Up the Drive and Operation Status Display....................................................................... 70
4.5 Start-Up Procedure .............................................................................................................71
Bypass Start-Up Preparation............................................................................................................. 71
Bypass Start-Up Procedure............................................................................................................... 72
4.6 Application Selection..........................................................................................................75
4.7 Auto-Tuning .........................................................................................................................76
Types of Auto-Tuning........................................................................................................................ 76
Before Auto-Tuning the Drive............................................................................................................ 76
Auto-Tuning Interruption and Fault Codes ........................................................................................ 77
4
YASKAWA SIEP YAIP1B 01A YASKAWA AC Drive – P1000 Bypass Technical Manual

Table of Contents
Auto-Tuning Operation Example....................................................................................................... 77
T1: Parameter Settings during Induction Motor Auto-Tuning............................................................ 79
5. PROGRAMMING .................................................................................................... 81
5.1 A: Initialization.....................................................................................................................82
A1: Initialization ................................................................................................................................. 82
5.2 b: Application.......................................................................................................................83
b1: Operation Mode Selection........................................................................................................... 83
b2: DC Injection Braking and Short Circuit Braking........................................................................... 85
b3: Speed Search.............................................................................................................................. 85
b5: PID Control.................................................................................................................................. 90
5.3 C: Tuning............................................................................................................................103
C1: Acceleration and Deceleration Times....................................................................................... 103
C2: S-Curve Characteristics............................................................................................................ 103
C4: Torque Compensation .............................................................................................................. 104
C6: Carrier Frequency..................................................................................................................... 104
5.4 d: Reference Settings .......................................................................................................106
d1: Frequency Reference................................................................................................................ 106
d2: Frequency Upper/Lower Limits ................................................................................................. 107
d3: Jump Frequency........................................................................................................................ 108
5.5 E: Motor Parameters .........................................................................................................109
E1: V/f Pattern for Motor 1............................................................................................................... 109
E2: Motor 1 Parameters .................................................................................................................. 113
5.6 F: Options...........................................................................................................................114
F6: Drive/Bypass Communications ................................................................................................. 114
5.7 H: Terminal Functions.......................................................................................................115
H1: Multi-Function Digital Inputs ..................................................................................................... 115
H3: Multi-Function Analog Inputs .................................................................................................... 117
H4: Multi-Function Analog Outputs ................................................................................................. 123
H5: MEMOBUS/Modbus Serial Communication ............................................................................. 125
5.8 L: Protection Functions ....................................................................................................126
L1: Motor Protection........................................................................................................................ 126
L2: Momentary Power Loss Ride-Thru............................................................................................ 127
L3: Stall Prevention ......................................................................................................................... 128
L4: Reference Detection.................................................................................................................. 131
L5: Fault Restart.............................................................................................................................. 131
L6: Torque Detection....................................................................................................................... 134
L8: Drive Protection......................................................................................................................... 136
5.9 n: Special Adjustments.....................................................................................................139
n1: Hunting Prevention.................................................................................................................... 139
n3: High Slip Braking (HSB) and Overexcitation Braking................................................................ 139
5.10 o: Operator-Related Settings ...........................................................................................141
o1: HOA Keypad Display Selection................................................................................................. 141
o2: HOA Keypad Functions............................................................................................................. 142
o4: Maintenance Monitor Settings................................................................................................... 142
5.11 S: Special Parameters.......................................................................................................143
S1: Dynamic Audible Noise Control Function ................................................................................. 143
S2: Sequence Timers...................................................................................................................... 144
Examples of Sequence Timers ....................................................................................................... 146
YASKAWA SIEP YAIP1B 01A YASKAWA AC Drive – P1000 Bypass Technical Manual
5

Table of Contents
T: Motor Tuning............................................................................................................................... 149
5.12 U: Monitor Parameters......................................................................................................150
UB: Bypass Monitors....................................................................................................................... 150
U1: Operation Status Monitors........................................................................................................ 150
U2: Fault Trace................................................................................................................................ 150
U3: Fault History.............................................................................................................................. 150
U4: Maintenance Monitors .............................................................................................................. 150
U5: PID Monitors............................................................................................................................. 150
5.13 Z: Bypass Parameters.......................................................................................................151
Z1: Bypass Control System............................................................................................................. 151
Z2: Bypass Control Input/Output..................................................................................................... 161
Z3: Bypass Control Communication................................................................................................ 164
Z4: Ethernet Option Bypass Control................................................................................................ 166
6. DIAGNOSTICS & TROUBLESHOOTING ............................................................ 169
6.1 Section Safety....................................................................................................................170
6.2 Motor Performance Fine-Tuning......................................................................................172
Fine-Tuning V/f Control ................................................................................................................... 172
Parameters to Minimize Motor Hunting and Oscillation .................................................................. 172
6.3 Drive Alarms, Faults, and Errors .....................................................................................173
Types of Alarms, Faults, and Errors................................................................................................ 173
Alarm and Error Displays ................................................................................................................ 174
6.4 Fault Detection ..................................................................................................................176
Fault Displays, Causes, and Possible Solutions ............................................................................. 176
6.5 Alarm Detection.................................................................................................................190
Alarm Codes, Causes, and Possible Solutions............................................................................... 190
6.6 Programming Errors .........................................................................................................197
Programming Error Codes, Causes, and Possible Solutions.......................................................... 197
6.7 Auto-Tuning Fault Detection ............................................................................................200
Auto-Tuning Codes, Causes, and Possible Solutions..................................................................... 200
6.8 Diagnosing and Resetting Faults.....................................................................................202
Fault Occurs Simultaneously with Power Loss ............................................................................... 202
If the Drive Still has Power After a Fault Occurs ............................................................................. 202
Viewing Fault Trace Data After Fault .............................................................................................. 202
Fault Reset Methods ....................................................................................................................... 203
6.9 Troubleshooting without Fault Display...........................................................................204
Common Problems.......................................................................................................................... 204
Cannot Change Parameter Settings ............................................................................................... 204
Motor Does Not Rotate Properly after Pressing AUTO Button or after Entering External Run
Command ...................................................................................................................................... 205
Motor is Too Hot.............................................................................................................................. 206
oPE02 Error Occurs When Lowering the Motor Rated Current Setting .......................................... 206
Motor Stalls during Acceleration or Acceleration Time is Too Long................................................ 207
Drive Frequency Reference Differs from the Controller Frequency Reference Command............. 207
Excessive Motor Oscillation and Erratic Rotation............................................................................ 208
Deceleration Takes Longer Than Expected.................................................................................... 208
Noise From Drive or Motor Cables When the Drive is Powered On ............................................... 208
Ground Fault Circuit Interrupter (GFCI) Trips During Run .............................................................. 208
Connected Machinery Vibrates When Motor Rotates ..................................................................... 208
6
YASKAWA SIEP YAIP1B 01A YASKAWA AC Drive – P1000 Bypass Technical Manual
Table of Contents
PID Output Fault.............................................................................................................................. 209
Motor Rotates after the Drive Output is Shut Off (Motor Rotates During DC Injection Braking) ..... 209
Output Frequency is Not as High as Frequency Reference............................................................ 209
Sound from Motor............................................................................................................................ 209
Motor Does Not Restart after Power Loss....................................................................................... 210
7. PERIODIC INSPECTION & MAINTENANCE ...................................................... 211
7.1 Section Safety....................................................................................................................212
7.2 Inspection ..........................................................................................................................214
Recommended Daily Inspection...................................................................................................... 214
Recommended Periodic Inspection................................................................................................. 215
7.3 Periodic Maintenance .......................................................................................................217
Replacement Parts.......................................................................................................................... 217
7.4 HOA Keypad Battery Replacement..................................................................................219
Real-Time Clock Adjustment........................................................................................................... 219
7.5 Drive Cooling Fan Replacement ......................................................................................221
A. SPECIFICATIONS ................................................................................................ 223
A.1 Power Ratings ...................................................................................................................224
Three-Phase 208 Vac Bypass Drive Models D002 to D030 ........................................................... 224
Three-Phase 208 Vac Bypass Drive Models D046 to D211 ........................................................... 224
Three-Phase 208 Vac Bypass Drive Models D273 to D396 ........................................................... 225
Three-Phase 480 Vac Bypass Drive Models B001 to B027............................................................ 225
Three-Phase 480 Vac Bypass Drive Models B034 to B156............................................................ 226
Three-Phase 480 Vac Bypass Drive Models B180 to B590............................................................ 226
A.2 Drive Specifications ..........................................................................................................227
A.3 Drive Watt Loss Data ........................................................................................................229
A.4 Drive Derating Data ...........................................................................................................231
Rated Current Depending on Carrier Frequency ............................................................................ 231
Altitude Derating.............................................................................................................................. 232
A.5 Bypass Options .................................................................................................................233
Option PA........................................................................................................................................ 233
Option PK........................................................................................................................................ 233
Option PM ....................................................................................................................................... 233
Option PN........................................................................................................................................ 233
Option PR........................................................................................................................................ 233
Option PX........................................................................................................................................ 233
Option PY........................................................................................................................................ 233
Option TD........................................................................................................................................ 233
Option TG........................................................................................................................................ 233
Option TH........................................................................................................................................ 233
Option TL......................................................................................................................................... 233
Option TQ........................................................................................................................................ 233
Option TW ....................................................................................................................................... 233
B. PARAMETER LIST............................................................................................... 235
B.1 Parameter Groups .............................................................................................................236
B.2 A: Initialization Parameters ..............................................................................................237
A1: Initialization ............................................................................................................................... 237
YASKAWA SIEP YAIP1B 01A YASKAWA AC Drive – P1000 Bypass Technical Manual
7

Table of Contents
B.3 b: Application.....................................................................................................................238
b1: Operation Mode Selection......................................................................................................... 238
b2: DC Injection Braking and Short Circuit Braking......................................................................... 238
b3: Speed Search............................................................................................................................ 238
b5: PID Control................................................................................................................................ 239
B.4 C: Tuning............................................................................................................................242
C1: Acceleration and Deceleration Times....................................................................................... 242
C2: S-Curve Characteristics............................................................................................................ 242
C4: Torque Compensation .............................................................................................................. 242
C6: Carrier Frequency..................................................................................................................... 242
B.5 d: References.....................................................................................................................243
d1: Frequency Reference................................................................................................................ 243
d2: Frequency Upper/Lower Limits ................................................................................................. 243
d3: Jump Frequency........................................................................................................................ 243
B.6 E: Motor Parameters .........................................................................................................244
E1: V/f Pattern for Motor 1............................................................................................................... 244
E2: Motor Parameters ..................................................................................................................... 244
B.7 F: Options...........................................................................................................................245
F6: Drive/Bypass Communications ................................................................................................. 245
B.8 H Parameters: Multi-Function Terminals ........................................................................246
H1: Multi-Function Digital Inputs ..................................................................................................... 246
H3: Multi-Function Analog Inputs .................................................................................................... 247
H4: Analog Outputs......................................................................................................................... 248
H5: MEMOBUS/Modbus Serial Communication ............................................................................. 249
B.9 L: Protection Function ......................................................................................................250
L1: Motor Protection........................................................................................................................ 250
L2: Momentary Power Loss Ride-Thru............................................................................................ 250
L3: Stall Prevention ......................................................................................................................... 250
L4: Speed Detection........................................................................................................................ 251
L5: Fault Restart.............................................................................................................................. 251
L6: Torque Detection....................................................................................................................... 252
L8: Drive Protection......................................................................................................................... 252
B.10 n: Special Adjustment.......................................................................................................253
n1: Hunting Prevention.................................................................................................................... 253
n3: High Slip Braking (HSB) and Overexcitation Braking................................................................ 253
B.11 o: Operator-Related Settings ...........................................................................................254
o1: HOA Keypad Display Selection................................................................................................. 254
o2: HOA Keypad Functions............................................................................................................. 254
o4: Maintenance Monitor Settings................................................................................................... 254
B.12 S: Special Application.......................................................................................................255
S1: Dynamic Noise Control Function .............................................................................................. 255
S2: Sequence Timers...................................................................................................................... 255
T: Motor Tuning............................................................................................................................... 257
T1: Induction Motor Auto-Tuning..................................................................................................... 257
B.13 U: Monitors.........................................................................................................................259
UB: Bypass Control Monitors .......................................................................................................... 259
U1: Operation Status Monitors........................................................................................................ 260
U2: Fault Trace................................................................................................................................ 262
U3: Fault History.............................................................................................................................. 263
8
YASKAWA SIEP YAIP1B 01A YASKAWA AC Drive – P1000 Bypass Technical Manual

Table of Contents
U4: Maintenance Monitors .............................................................................................................. 264
U5: PID Monitors............................................................................................................................. 266
B.14 Z: Bypass Parameters.......................................................................................................267
Z1: Bypass Control System............................................................................................................. 267
Z2: Bypass Control Input/Output..................................................................................................... 270
Z3: Bypass Control Communication................................................................................................ 271
Z4: Bypass Control Option Boards.................................................................................................. 272
B.15 Defaults by Drive Model....................................................................................................275
C. BACNET COMMUNICATIONS ............................................................................ 287
C.1 BACnet Configuration.......................................................................................................288
C.2 Communication Specifications........................................................................................289
C.3 Connecting to a Network ..................................................................................................290
Network Cable Connection.............................................................................................................. 290
Wiring Diagram for Multiple Connections........................................................................................ 291
Network Termination ....................................................................................................................... 291
C.4 BACnet Setup Parameters................................................................................................292
BACnet Serial Communication........................................................................................................ 292
C.5 Bypass Operations by BACnet ........................................................................................294
Observing the Bypass Operation .................................................................................................... 294
Controlling the Bypass .................................................................................................................... 294
C.6 BACnet Objects Supported ..............................................................................................295
Present Value Access ..................................................................................................................... 295
Supported Properties of Objects ..................................................................................................... 295
Analog Input Objects....................................................................................................................... 296
Analog Output Objects .................................................................................................................... 296
Analog Value Objects...................................................................................................................... 296
Binary Input Objects........................................................................................................................ 297
Binary Output Objects ..................................................................................................................... 298
Binary Value Objects....................................................................................................................... 298
Device Object.................................................................................................................................. 300
C.7 Accessing Bypass Parameters and the Enter Command .............................................301
Reading Bypass Parameters........................................................................................................... 301
Writing Bypass Parameters............................................................................................................. 301
Enter Command .............................................................................................................................. 301
C.8 Communication Errors .....................................................................................................302
C.9 BACnet Protocol Implementation Conformance Statement..........................................303
D. MEMOBUS/MODBUS COMMUNICATIONS........................................................ 305
D.1 MEMOBUS/Modbus Configuration ..................................................................................306
D.2 Communication Specifications........................................................................................307
D.3 Connecting to a Network ..................................................................................................308
Network Cable Connection.............................................................................................................. 308
Wiring Diagram for Multiple Connections........................................................................................ 309
Network Termination ....................................................................................................................... 309
D.4 MEMOBUS/Modbus Setup Parameters ...........................................................................310
MEMOBUS/Modbus Serial Communication.................................................................................... 310
D.5 Bypass Operations by MEMOBUS/Modbus....................................................................312
YASKAWA SIEP YAIP1B 01A YASKAWA AC Drive – P1000 Bypass Technical Manual
9

Table of Contents
Observing the Bypass Operation .................................................................................................... 312
D.6 Communications Timing...................................................................................................313
Command Messages from Master to Bypass ................................................................................. 313
Response Messages from Bypass to Master.................................................................................. 313
D.7 Message Format ................................................................................................................314
Message Content ............................................................................................................................ 314
Slave Address ................................................................................................................................. 314
Function Code................................................................................................................................. 314
Data................................................................................................................................................. 314
Error Check ..................................................................................................................................... 314
D.8 Message Examples ...........................................................................................................316
Reading Drive MEMOBUS/Modbus Register Contents .................................................................. 316
Loopback Test................................................................................................................................. 316
Writing to Multiple Registers............................................................................................................ 317
D.9 MEMOBUS/Modbus Data Table........................................................................................318
Command Data ............................................................................................................................... 318
Monitor Data.................................................................................................................................... 319
Broadcast Messages....................................................................................................................... 328
Fault Trace Contents....................................................................................................................... 328
Bypass Fault Codes ........................................................................................................................ 330
Alarm Register Contents ................................................................................................................. 330
D.10 Enter Command.................................................................................................................331
Enter Command Behavior............................................................................................................... 331
D.11 Communication Errors .....................................................................................................332
MEMOBUS/Modbus Error Codes.................................................................................................... 332
Slave Not Responding..................................................................................................................... 332
E. STANDARDS COMPLIANCE .............................................................................. 333
E.1 Section Safety....................................................................................................................334
E.2 European Standards .........................................................................................................336
CE Low Voltage Directive Compliance............................................................................................ 336
EMC Guidelines Compliance .......................................................................................................... 336
E.3 UL/cUL Standards .............................................................................................................337
UL Standards Compliance .............................................................................................................. 337
F. APOGEE FLN NETWORK PROTOCOL.............................................................. 339
F.1 APOGEE FLN Set-Up.........................................................................................................340
Bypass Parameter Settings for APOGEE FLN Communications.................................................... 340
F.2 Connecting to a Network..................................................................................................341
Network Cable Connection.............................................................................................................. 341
Wiring Diagram for Multiple Connections........................................................................................ 342
Network Termination ....................................................................................................................... 342
Recommended Cable...................................................................................................................... 342
F.3 Slope and Intercept Conversion ......................................................................................343
Drive Controlled Feedback.............................................................................................................. 343
Field Panel Controlled Feedback .................................................................................................... 343
Other Functionality .......................................................................................................................... 344
F.4 APOGEE FLN Point List Summary ..................................................................................345
10
YASKAWA SIEP YAIP1B 01A YASKAWA AC Drive – P1000 Bypass Technical Manual

Table of Contents
F.5 Cable Loss Configuration and Behavior.........................................................................349
Drive Behavior at Loss of Communication ...................................................................................... 349
Apogee FLN Points ......................................................................................................................... 349
F.6 Mailbox Function...............................................................................................................351
Mailbox Function Points .................................................................................................................. 351
F.7 Fault Codes........................................................................................................................352
Communications Fault..................................................................................................................... 352
Bypass Faults–Apogee FLN Configuration ..................................................................................... 352
G. METASYS N2 NETWORK PROTOCOL .............................................................. 355
G.1 N2 Specifications and Configuration...............................................................................356
G.2 Connecting to a Network ..................................................................................................357
Network Cable Connection.............................................................................................................. 357
Wiring Diagram for Multiple Connections........................................................................................ 358
Network Termination ....................................................................................................................... 358
G.3 N2 Setup Parameters ........................................................................................................359
N2 Serial Communication................................................................................................................ 359
G.4 Bypass Operations by N2 .................................................................................................361
Observing the Bypass Operation .................................................................................................... 361
Controlling the Bypass .................................................................................................................... 361
G.5 Communications Timing...................................................................................................365
Command Messages from Master to Bypass ................................................................................. 365
Response Messages from Bypass to Master.................................................................................. 365
G.6 Metasys N2 Point Database..............................................................................................366
Metasys N2 Analog Input (AI) Summary......................................................................................... 366
Metasys N2 Analog Output (AO) Summary .................................................................................... 367
Metasys N2 Binary Input (BI) Summary.......................................................................................... 367
Metasys N2 Binary Output (BO) Summary ..................................................................................... 368
G.7 Mailbox Function ...............................................................................................................369
Reading Drive Parameters.............................................................................................................. 369
Writing Drive Parameters ................................................................................................................ 369
H. QUICK REFERENCE SHEET .............................................................................. 371
H.1 P1000 Bypass and Motor Specifications ........................................................................372
P1000 Bypass Specifications.......................................................................................................... 372
Motor Specifications........................................................................................................................ 372
H.2 Basic Parameter Settings .................................................................................................373
Quick Setting Parameters ............................................................................................................... 373
Motor Setup..................................................................................................................................... 373
Multi-Function Digital Inputs............................................................................................................ 373
Analog Inputs .................................................................................................................................. 373
Multi-Function Digital Outputs ......................................................................................................... 374
Monitor Outputs............................................................................................................................... 374
H.3 User Setting Table.............................................................................................................375
INDEX ................................................................................................................... 381
YASKAWA SIEP YAIP1B 01A YASKAWA AC Drive – P1000 Bypass Technical Manual
11

Table of Contents
This Page Intentionally Blank
12
YASKAWA SIEP YAIP1B 01A YASKAWA AC Drive – P1000 Bypass Technical Manual
i
Preface & General Safety
This section provides safety messages pertinent to this product that, if not heeded, may result in fatality,
personal injury, or equipment damage. Yaskawa is not responsible for the consequences of ignoring
these instructions.
i.1 PREFACE...............................................................................................................14
i.2 GENERAL SAFETY...............................................................................................16
YASKAWA SIEP YAIP1B 01A YASKAWA AC Drive – P1000 Bypass Technical Manual
13
i.1 Preface
i.1 Preface
Yaskawa manufactures products used as components in a wide variety of industrial systems and equipment. The selection and
application of Yaskawa products remain the responsibility of the equipment manufacturer or end user. Yaskawa accepts no
responsibility for the way its products are incorporated into the final system design. Under no circumstances should any
Yaskawa product be incorporated into any product or design as the exclusive or sole safety control. Without exception, all
controls should be designed to detect faults dynamically and fail safely under all circumstances. All systems or equipment
designed to incorporate a product manufactured by Yaskawa must be supplied to the end user with appropriate warnings and
instructions as to the safe use and operation of that part. Any warnings provided by Yaskawa must be promptly provided to
the end user. Yaskawa offers an express warranty only as to the quality of its products in conforming to standards and
specifications published in the Yaskawa manual. NO OTHER WARRANTY, EXPRESS OR IMPLIED, IS OFFERED.
Yaskawa assumes no liability for any personal injury, property damage, losses, or claims arising from misapplication of its
products.
This manual is designed to ensure correct and suitable application of the P1000 Bypass. Read this manual before attempting
to install, operate, maintain, or inspect the bypass unit and keep it in a safe, convenient location for future reference. Be sure
you understand all precautions and safety information before attempting application.
u
Product Description
The P1000 Bypass provides a means of bypassing the drive while allowing the motor to operate at full speed, directly from
the AC line. It incorporates an AC Drive and a three-contactor bypass arrangement in a single UL listed enclosure. The two
electrically interlocked IEC rated drive output and bypass contactors isolate the drive from the load when operating in Bypass
mode. An IEC rated drive input contactor also isolates the drive from the line when operating in Bypass mode.
Control logic provides industry standard Hand/Off/Auto functions, BAS Interlock, and safety circuit interlocks in both Drive
and Bypass operating modes.
Bypass components include: a fused 120 Vac control circuit transformer, drive input fuses, motor overload, and an HOA
keypad with LCD display.
The P1000 drive, a component of the P1000 Bypass package, is a pulse width modulated drive for three-phase AC induction
motors. This type of drive is also known as an adjustable frequency drive, variable frequency drive, AC Drive, AFD, ASD,
VFD, and inverter.
The drive is a variable torque AC drive, designed specifically for fans, blowers, and pumps.
The P1000 Bypass has BACnet and Modbus® embedded communications.
The LCD keypad/operator is equipped with Hand/Off/Auto functions. Optional DriveWizard software allows upload/
download, as well as graphing and monitoring of drive parameters from a PC for ease of drive management.
Built-in PI control eliminates the need for closed loop output signals from a building automation system. It includes feedback
display, inverse, square root and differential control functions, and maintains setpoint for closed loop control of fans and pumps
for pressure, flow, or temperature regulation. An additional independent PI control is also provided for external devices.
u
Applicable Documentation
The following manuals are available for the P1000 Bypass:
P1000 Bypass Technical Manual (SIEPYAIP1B01)
Read this manual first. This manual is packaged together with the product and contains basic information required to install
and wire the bypass. It also gives detailed information on fault diagnostics, parameter settings, and BACnet specifications.
The purpose of this manual is to prepare the P1000 Bypass for a trial run with an application and for basic operation. This
manual is also available for download on the Yaskawa documentation website, www.yaskawa.com.
P1000-Series AC Drive Quick Start Guide (TOEPYAIP1U01)
This manual contains basic information required to install and wire the drive. It also gives detailed information on fault
diagnostics, parameter settings, and BACnet specifications. The purpose of this manual is to prepare the drive for a trial
run with an application and for basic operation. This manual is available for download on the Yaskawa documentation
website, www.yaskawa.com.
P1000-Series AC Drive Technical Manual (SIEPYAIP1U01)
This manual provides detailed information on parameter settings, drive functions, maintenance, and MEMOBUS/Modbus
specifications. Use this manual to expand drive functionality. This manual is available for download on the Yaskawa
documentation website, www.yaskawa.com.
14
YASKAWA SIEP YAIP1B 01A YASKAWA AC Drive – P1000 Bypass Technical Manual
u
TERMSTERMS
TERMSTERMS
Symbols
Note: Indicates a supplement or precaution that does not cause drive damage.
Indicates a term or definition used in this manual.
u
Terms and Abbreviations
• Bypass: Yaskawa P1000 Bypass
• Drive: Yaskawa P1000-Series Drive
• BCD: Binary Coded Decimal
• H: Hexadecimal Number Format
• IGBT: Insulated Gate Bipolar Transistor
• kbps: Kilobits per Second
• MAC: Media Access Control
• Mbps: Megabits per Second
• PCB: Printer Circuit Board
• r/min: Revolutions per Minute
• V/f: V/f Control
u
Trademarks
i.1 Preface
•
APOGEE™ FLN, trademark of Siemens Building Technologies, Inc.
• BACnet is a trademark of the American Society of Heating, Refrigerating, and Air-Conditioning Engineers (ASHRAE).
• CANopen is a trademark of CAN in Automation (CiA).
• CC-Link is a trademark of CC-Link Partner Association (CLPA).
• CompoNet is a trademark of Open DeviceNet Vendor Association, Inc. (ODVA).
• DeviceNet is a trademark of Open DeviceNet Vendor Association, Inc. (ODVA).
• EtherCAT is a trademark of Beckhoff Automation GmbH, Germany.
• EtherNet/IP is a trademark of Open DeviceNet Vendor Association, Inc. (ODVA).
• LONWORKS®, trademark of Echelon Corporation
• MECHATROLINK-I/MECHATROLINK-II are trademarks of MECHATROLINK Members Association (MMA).
• Metasys®, trademark of Johnson Controls Inc.
• Modbus®, trademark of Schneider Automation, Inc.
• PROFIBUS-DP is a trademark of PROFIBUS International (PI).
• PROFNET is a trademark of PROFIBUS International (PI).
• Other companies and product names mentioned in this manual are trademarks of those companies.
YASKAWA SIEP YAIP1B 01A YASKAWA AC Drive – P1000 Bypass Technical Manual
15
i.2 General Safety
i.2 General Safety
u
Supplemental Safety Information
General Precautions
• The diagrams in this manual may be indicated without covers or safety shields to show details. Replace the covers or shields before
operating the drive and run the drive according to the instructions described in this manual.
• Any illustrations, photographs, or examples used in this manual are provided as examples only and may not apply to all products to
which this manual is applicable.
• The products and specifications described in this manual or the content and presentation of the manual may be changed without notice
to improve the product and/or the manual.
• When ordering a new copy of the manual due to damage or loss, contact your Yaskawa representative or the nearest Yaskawa sales
office and provide the manual number shown on the front cover.
• If nameplate becomes worn or damaged, order a replacement from your Yaskawa representative or the nearest Yaskawa sales office.
WARNING
Read and understand this manual before installing, operating or servicing this bypass. The bypass must be installed according
to this manual and local codes.
The following conventions are used to indicate safety messages in this manual. Failure to heed these messages could result
in serious or fatal injury or damage to the products or to related equipment and systems.
DANGER
Indicates a hazardous situation, which, if not avoided, will result in death or serious injury.
WARNING
Indicates a hazardous situation, which, if not avoided, could result in death or serious injury.
WARNING! may also be indicated by a bold key word embedded in the text followed by an italicized safety message.
CAUTION
Indicates a hazardous situation, which, if not avoided, could result in minor or moderate injury.
CAUTION! may also be indicated by a bold key word embedded in the text followed by an italicized safety message.
NOTICE
Indicates a property damage message.
NOTICE: may also be indicated by a bold key word embedded in the text followed by an italicized safety message.
16
YASKAWA SIEP YAIP1B 01A YASKAWA AC Drive – P1000 Bypass Technical Manual
i.2 General Safety
u
Safety Messages
DANGER
Heed the safety messages in this manual.
Failure to comply will result in death or serious injury.
The operating company is responsible for any injuries or equipment damage resulting from failure to heed the warnings in
this manual.
Electrical Shock Hazard
Before servicing, disconnect all power to the equipment.
The internal capacitor remains charged even after the power supply is turned off. The charge indicator LED will extinguish
when the DC bus voltage is below 50 Vdc. To prevent electric shock, wait for at least the time specified on the warning label,
once all indicators are OFF, measure for unsafe voltages to confirm the drive is safe prior to servicing.
Failure to comply will result in death or serious injury.
WARNING
Sudden Movement Hazard
System may start unexpectedly upon application of power, resulting in death or serious injury.
Clear all personnel from the drive, motor and machine area before applying power. Secure covers, couplings, shaft keys and
machine loads before applying power to the drive.
Electrical Shock Hazard
Do not attempt to modify or alter the drive in any way not explained in this manual.
Failure to comply could result in death or serious injury.
Yaskawa is not responsible for any modification of the product made by the user. This product must not be modified.
Do not allow unqualified personnel to use equipment.
Failure to comply could result in death or serious injury.
Maintenance, inspection, and replacement of parts must be performed only by authorized personnel familiar with installation,
adjustment and maintenance of AC drives.
Do not remove covers or touch circuit boards while the power is on.
Failure to comply could result in death or serious injury.
Make sure the protective earthing conductor complies with technical standards and local safety regulations.
Because the leakage current exceeds 3.5 mA in models 4A0414 and larger, IEC/EN 61800-5-1 states that either the power
supply must be automatically disconnected in case of discontinuity of the protective earthing conductor or a protective
earthing conductor with a cross-section of at least 10 mm2 (Cu) or 16 mm2 (Al) must be used. Failure to comply may result
in death or serious injury.
Always use appropriate equipment for Ground Fault Circuit Interrupters (GFCIs).
The drive can cause a residual current with a DC component in the protective earthing conductor. Where a residual current
operated protective or monitoring device is used for protection in case of direct or indirect contact, always use a type B GFCI
according to IEC/EN 60755.
Fire Hazard
Do not use an improper voltage source.
Failure to comply could result in death or serious injury by fire.
Verify that the rated voltage of the drive matches the voltage of the incoming power supply before applying power.
YASKAWA SIEP YAIP1B 01A YASKAWA AC Drive – P1000 Bypass Technical Manual
17
i.2 General Safety
WARNING
Install according to applicable local codes and this Installation Manual. Failure to comply could result in fire and
damage to the drive or injury to personnel.
The Bypass includes branch circuit protection and is suitable for use on a circuit capable of delivering not more than 65,000
RMS symmetrical amperes (100,000 RMS with 100 kA Input Circuit Breaker option (PM) added), 208 Vac maximum and
480 Vac maximum.
Crush Hazard
Do not use this drive in lifting applications without installing external safety circuitry to prevent accidental dropping
of the load.
The drive does not possess built-in load drop protection for lifting applications.
Failure to comply could result in death or serious injury from falling loads.
Install electrical and/or mechanical safety circuit mechanisms independent of drive circuitry.
NOTICE
Observe proper electrostatic discharge procedures (ESD) when handling the drive and circuit boards.
Failure to comply may result in ESD damage to the drive circuitry.
Do not perform a withstand voltage test on any part of the drive.
Failure to comply could result in damage to the sensitive devices within the drive.
Do not operate damaged equipment.
Failure to comply could result in further damage to the equipment.
Do not connect or operate any equipment with visible damage or missing parts.
If a fuse is blown or a Ground Fault Circuit Interrupter (GFCI) is tripped, check the wiring and the selection of the
peripheral devices.
Contact your supplier if the cause cannot be identified after checking the above.
Do not restart the drive immediately operate the peripheral devices if a fuse is blown or a GFCI is tripped.
Check the wiring and the selection of peripheral devices to identify the cause. Contact your supplier before restarting the
drive or the peripheral devices if the cause cannot be identified.
Do not expose the drive to halogen group disinfectants.
Failure to comply may cause damage to the electrical components in the drive.
Do not pack the drive in wooden materials that have been fumigated or sterilized.
Do not sterilize the entire package after the product is packed.
u
General Application Precautions
Selection
n
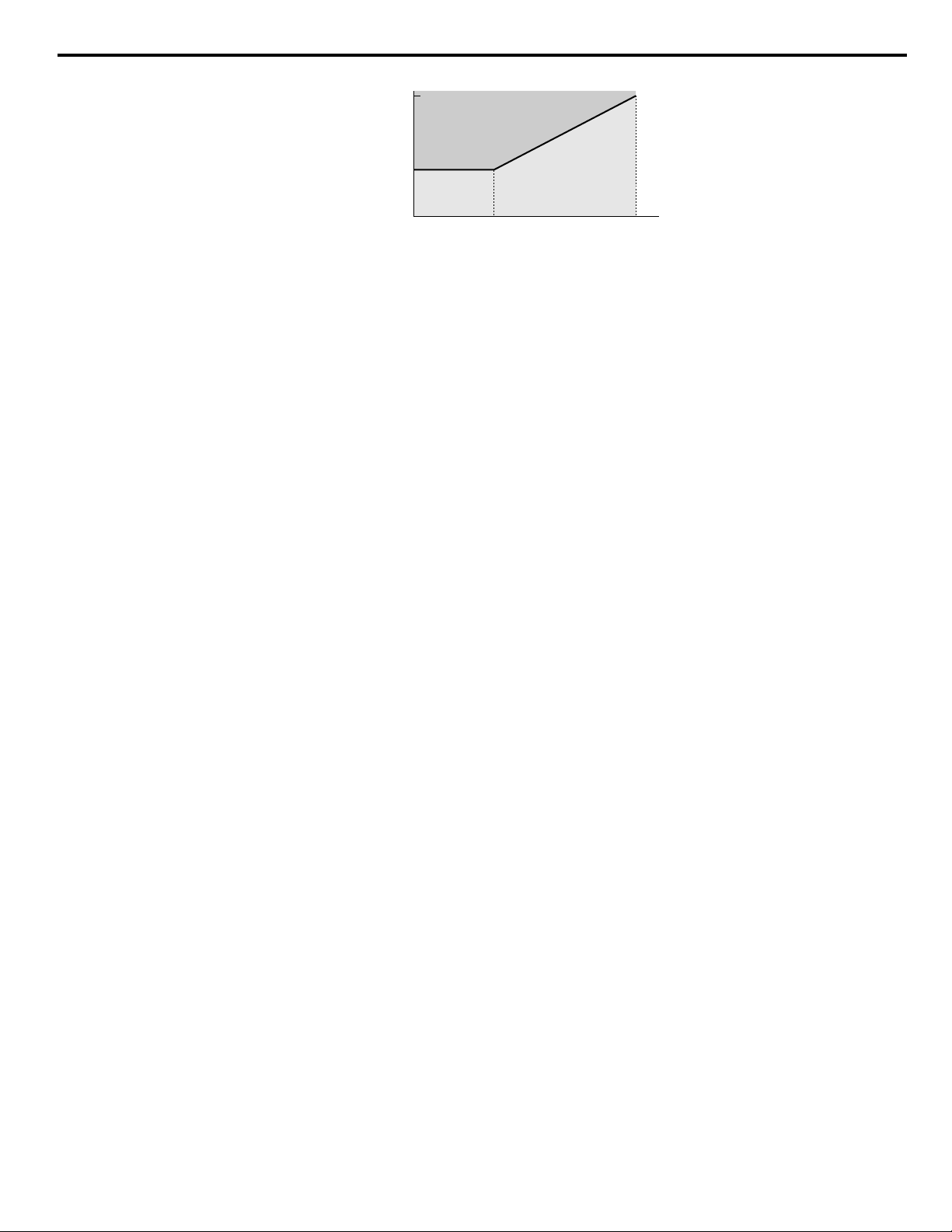
Installing a Reactor
Use an AC reactor or DC link choke in the following situations:
• to suppress harmonic current.
• to smooth peak current that results from capacitor switching.
• when the power supply is above 600 kVA.
• when the drive is running from a power supply system with thyristor converters.
Note: A DC link choke is built in to models B052 to B590 and D088 to D396.
18
YASKAWA SIEP YAIP1B 01A YASKAWA AC Drive – P1000 Bypass Technical Manual
i.2 General Safety
4000
Power supply harmonics
reactor required
Power Supply
Capacity (kVA)
600
0
Drive Capacity (kVA)
Figure i.1 Installing a Reactor
Reactor
unnecessary
60 400
Drive Capacity
For specialized motors, make sure that the motor rated current is less than the rated output current for the drive.
When running more than one motor in parallel from a single drive, the capacity of the drive should be larger than [total motor
rated current × 1.1].
Starting Torque
The overload rating for the drive determines the starting and accelerating characteristics of the motor. Expect lower torque
than when running from line power. To get more starting torque, use a larger drive or increase both the motor and drive capacity.
Emergency Stop
During a drive fault condition, the output shuts off but the motor does not stop immediately. A mechanical brake may be
required when it is necessary to stop the motor faster than the ability of the Fast Stop function of the drive.
Options
NOTICE: The B1, B2, ⊖, ⊕1, ⊕2, and ⊕3 terminals are used to connect optional drive-specific compatible devices only. Connecting non-
Yaskawa-approved devices to these terminals may damage the drive.
Repetitive Starting/Stopping
Laundry machines, punching presses, and other applications with frequent starts and stops often approach 150% of their rated
current values. Heat stress generated from repetitive high current will shorten the life span of the IGBTs.
Yaskawa recommends lowering the carrier frequency, particularly when audible noise is not a concern. It is beneficial to
reduce the load, increase the acceleration and deceleration times, or switch to a larger drive to help keep peak current levels
under 150%. Be sure to check the peak current levels when starting and stopping repeatedly during the initial test run, and
make adjustments accordingly.
Installation
n
Enclosure Panels
Keep the drive in a clean environment by installing the drive in an enclosure panel or selecting an installation area free of
airborne dust, lint, and oil mist. Be sure to leave the required space between drives to provide for cooling, and take proper
measures so the ambient temperature remains within allowable limits and keep flammable materials away from the drive.
Yaskawa offers protective designs for drives that must be used in areas subjected to oil mist and excessive vibration. Contact
Yaskawa or your Yaskawa agent for details.
Installation Direction
NOTICE: Install the drive upright as specified in the manual. Refer to Mechanical Installation on page 38 for more information on
installation. Failure to comply may damage the drive due to improper cooling.
Settings
n
Upper Limits
NOTICE: The drive is capable of running the motor up to 400 Hz. Be sure to set the upper limit for the frequency of the drive to prevent the
possible danger of accidentally operating equipment at higher than rated speed. The default setting for the maximum output frequency is
60 Hz.
DC Injection Braking
NOTICE: Excessive current during DC Injection Braking and excessive duration of DC Injection Braking can cause motor overheat.
YASKAWA SIEP YAIP1B 01A YASKAWA AC Drive – P1000 Bypass Technical Manual
19
i.2 General Safety
Acceleration/Deceleration Times
Acceleration and deceleration times are affected by the amount of torque generated by the motor, the load torque, and the
inertia moment. Set a longer accel/decel time when Stall Prevention is enabled. The accel/decel times are lengthened for as
long as the Stall Prevention function is in operation. Install one of the available braking options or increase the capacity of the
drive for faster acceleration and deceleration.
General Handling
n
Wiring Check
NOTICE: Do not connect power supply lines to output terminals U/T1, V/T2, or W/T3. Failure to comply will destroy the drive. Be sure to
perform a final check of all sequence wiring and other connections before turning on the power and also check for short circuits on the
control terminals, which may damage the drive.
Inspection and Maintenance
WARNING! Electrical Shock Hazard. Capacitors in the drive do not immediately discharge after shutting off the power. Wait for at least the
amount of time specified on the drive before touching any components after shutting off the power. Failure to comply may cause injury to
personnel from electrical shock.
Transporting the Drive
NOTICE: Never steam clean the drive. During transport, keep the drive from coming into contact with salts, fluorine, bromine, phthalate
ester, and other such harmful chemicals.
u
Motor Application Precautions
Insulation Tolerance
NOTICE: Consider motor voltage tolerance levels and motor insulation in applications with an input voltage of over 480 V or particularly
long wiring distances.
High-Speed Operation
NOTICE: Problems may occur with the motor bearings and dynamic balance of the machine when operating a motor beyond its rated speed.
Contact the motor or machine manufacturer.
Torque Characteristics
Torque characteristics differ compared to operating the motor directly from line power. The user should have a full
understanding of the load torque characteristics for the application.
Vibration and Shock
The drive allows selection of high carrier PWM control and low carrier PWM. Selecting high carrier PWM can help reduce
motor oscillation.
Take particular caution when adding a variable speed drive to an application running a motor from line power at a constant
speed. If resonance occurs, install shock-absorbing isolation mounts around the base of the motor and enable the Jump
frequency selection to prevent continuous operation in the resonant frequency range.
Audible Noise
The audible noise of the motor varies based on the carrier frequency setting. However, drive current derating may be required.
When using a high carrier frequency, audible noise from the motor is comparable to the motor noise generated when running
from line power.
Specialized Motors
n
Multi-Pole Motor
The rated current of a multi-pole motor differs from that of a standard motor, so be sure to check the maximum current when
selecting a drive. Always stop the motor before switching between the number of motor poles. The motor will coast to stop if
a regen overvoltage (ov) fault occurs or if overcurrent (oC) protection is triggered.
Submersible Motor
The rated current of a submersible motor is greater than that of a standard motor, so select the drive capacity accordingly. Use
a motor cable large enough to avoid decreasing the maximum torque level from voltage drop caused by a long motor cable.
Explosion-Proof Motor
The motor and the drive must be tested together to be certified as explosion-proof. The drive is not designed for explosionproof areas.
20
YASKAWA SIEP YAIP1B 01A YASKAWA AC Drive – P1000 Bypass Technical Manual

i.2 General Safety
Geared Motor
Make sure that the gear and the lubricant are rated for the desired speed range to avoid gear damage when operating at low
speeds or very high speeds. Consult with the manufacturer for applications that require operation outside the rated speed range
of the motor or gear box.
Single-Phase Motor
Variable speed drives are not designed to operate with single phase motors. Using capacitors to start the motor causes excessive
current to flow and can damage drive components. A split-phase start or a repulsion start can burn out the starter coils because
the internal centrifugal switch is not activated. The drive is for use with three-phase motors only.
Motor with Brake
Take caution when using the drive to operate a motor with a built-in holding brake. If the brake is connected to the output side
of the drive, it may not release at start due to low voltage levels, so be sure to install a separate power supply for the motor
brake. Note that motors with built-in brakes tend to generate a fair amount of noise when running at low speeds.
YASKAWA SIEP YAIP1B 01A YASKAWA AC Drive – P1000 Bypass Technical Manual
21
Warning Label
600V 3Phase 5.5kW/3.7kW
i.2 General Safety
u
Drive Label Warning Example
Always heed the warning information listed in Figure i.2 in the position shown in Figure i.3.
WARNING
Risk of electric shock.
●
Read manual before installing.
●
Wait 5 minutes for capacitor
discharge after disconnecting
power supply.
●
To conform to requirements,
make sure to ground the supply
neutral for 400V class.
●
After opening the manual switch
between the drive and motor,
please wait 5 minutes before
inspecting, performing
maintenance or wiring the drive.
Hot surfaces
●
Top and Side surfaces may
become hot. Do not touch.
Figure i.2 Warning Information Example
22
Figure i.3 Warning Information Position
YASKAWA SIEP YAIP1B 01A YASKAWA AC Drive – P1000 Bypass Technical Manual
i.2 General Safety
u
Bypass Label Warning Example
Always heed the warning information listed in Figure i.4 and Figure i.5 affixed to the bypass cabinet door.
Figure i.4 Warning Information Example A
Figure i.5 Warning Information Example B
YASKAWA SIEP YAIP1B 01A YASKAWA AC Drive – P1000 Bypass Technical Manual
23

i.2 General Safety
u
Warranty Information
Scope of Warranty
n
Inspections
Customers are responsible for periodic inspections of the drive. Upon request, a Yaskawa representative will inspect the drive
for a fee. If the Yaskawa representative finds the drive to be defective due to Yaskawa workmanship or materials and the
defect occurs during the warranty period, this inspection fee will be waived and the problem remedied free of charge.
Repairs
If a Yaskawa product is found to be defective due to Yaskawa workmanship or materials and the defect occurs during the
warranty period, Yaskawa will provide a replacement, repair the defective product, and provide shipping to and from the site
free of charge.
However, if the Yaskawa Authorized Service Center determines that the problem with the drive is not due to defective
workmanship or materials, the customer will be responsible for the cost of any necessary repairs. Some problems that are
outside the scope of this warranty are:
Problems due to improper maintenance or handling, carelessness, or other reasons where the customer is determined to be
responsible.
Problems due to additions or modifications made to a Yaskawa product without Yaskawa’s understanding.
Problems due to the use of a Yaskawa product under conditions that do not meet the recommended specifications.
Problems caused by natural disaster or fire.
After the free warranty period elapses.
Replenishment or replacement of consumables or expendables.
Defective products due to packaging or fumigation.
Other problems not due to defects in Yaskawa workmanship or materials.
Warranty service is only applicable within the country where the product was purchased. However, after-sales service is
available for customers outside of the country where the product was purchased for a reasonable fee.
Contact your local Yaskawa representative for more information.
Exceptions
Any inconvenience to the customer or damage to non-Yaskawa products due to Yaskawa’s defective products whether within
or outside of the warranty period are NOT covered by warranty.
Restrictions
n
The drive is not designed or manufactured for use in devices or systems that may directly affect or threaten human lives or
health.
Customers who intend to use the product described in this manual for devices or systems relating to transportation, health
care, space aviation, atomic power, electric power, or in underwater applications must first contact their Yaskawa
representatives or the nearest Yaskawa sales office.
WARNING! Injury to Personnel. This product has been manufactured under strict quality-control guidelines. However, if this product is to
be installed in any location where failure of this product could involve or result in a life-and-death situation or loss of human life or in a facility
where failure may cause a serious accident or physical injury, safety devices must be installed to minimize the likelihood of any accident.
24
YASKAWA SIEP YAIP1B 01A YASKAWA AC Drive – P1000 Bypass Technical Manual
1
Receiving
This chapter explains how to inspect the P1000 Bypass upon receipt, and gives an overview of the
different enclosure types and components.
1.1 SECTION SAFETY.................................................................................................26
1.2 GENERAL DESCRIPTION.....................................................................................27
1.3 MODEL NUMBERS AND NAMEPLATE CHECKS................................................28
1.4 BYPASS COMPONENT DESCRIPTIONS.............................................................32
YASKAWA SIEP YAIP1B 01A YASKAWA AC Drive – P1000 Bypass Technical Manual
25
1.1 Section Safety
1.1 Section Safety
NOTICE
Observe proper electrostatic discharge procedures (ESD) when handling the drive and circuit boards.
Failure to comply may result in ESD damage to the drive circuitry.
A motor connected to a PWM drive may operate at a higher temperature than a utility-fed motor and the operating
speed range may reduce motor cooling capacity.
Ensure that the motor is suitable for drive duty and/or the motor service factor is adequate to accommodate the additional
heating with the intended operating conditions.
26
YASKAWA SIEP YAIP1B 01A YASKAWA AC Drive – P1000 Bypass Technical Manual
1.2 General Description
u
Control Mode Details
Table 1.1 gives an overview of the various features associated with the P1000 Bypass.
Table 1.1 Control Mode Features
Motor Type Induction Motors Comments
Control Mode V/f –
Basic Description V/f control –
Motor Type IM –
Type of Applications
Control Characteristics
Application-Specific
Multi Motor YES –
Motor data unknown YES –
High Speed Accuracy – –
Speed Control Range 1:40 May fluctuate with characteristics and motor temperature.
Speed Accuracy ±2 to 3%
Speed Response 3 Hz (approx.)
Starting Torque 140% at 3 Hz
Speed Search YES
Energy-Saving Control YES
High Slip Braking YES
Kinetic Energy Buffering YES
Overexcitation Deceleration YES Provides fast deceleration without using a braking resistor.
Overvoltage Suppression YES Prevents overvoltage by increasing speed during regeneration.
Speed deviation when operating at constant speed may fluctuate
with characteristics and motor temperature.
Max. frequency of a speed reference signal that the drive can follow
may fluctuate with characteristics and motor temperature.
Starting torque may fluctuate with characteristics and motor
temperature.
Performance may differ by capacity.
Bi-directional speed detection of a coasting motor to restart it
without stopping.
Saves energy by always operating the motor at its maximum
efficiency.
Increases motor loss to allow for faster deceleration. Effectiveness
may vary based on motor characteristics.
Decelerates the drive to allow it to ride through a momentary power
loss and continue operation.
1.2 General Description
Receiving
1
YASKAWA SIEP YAIP1B 01A YASKAWA AC Drive – P1000 Bypass Technical Manual
27
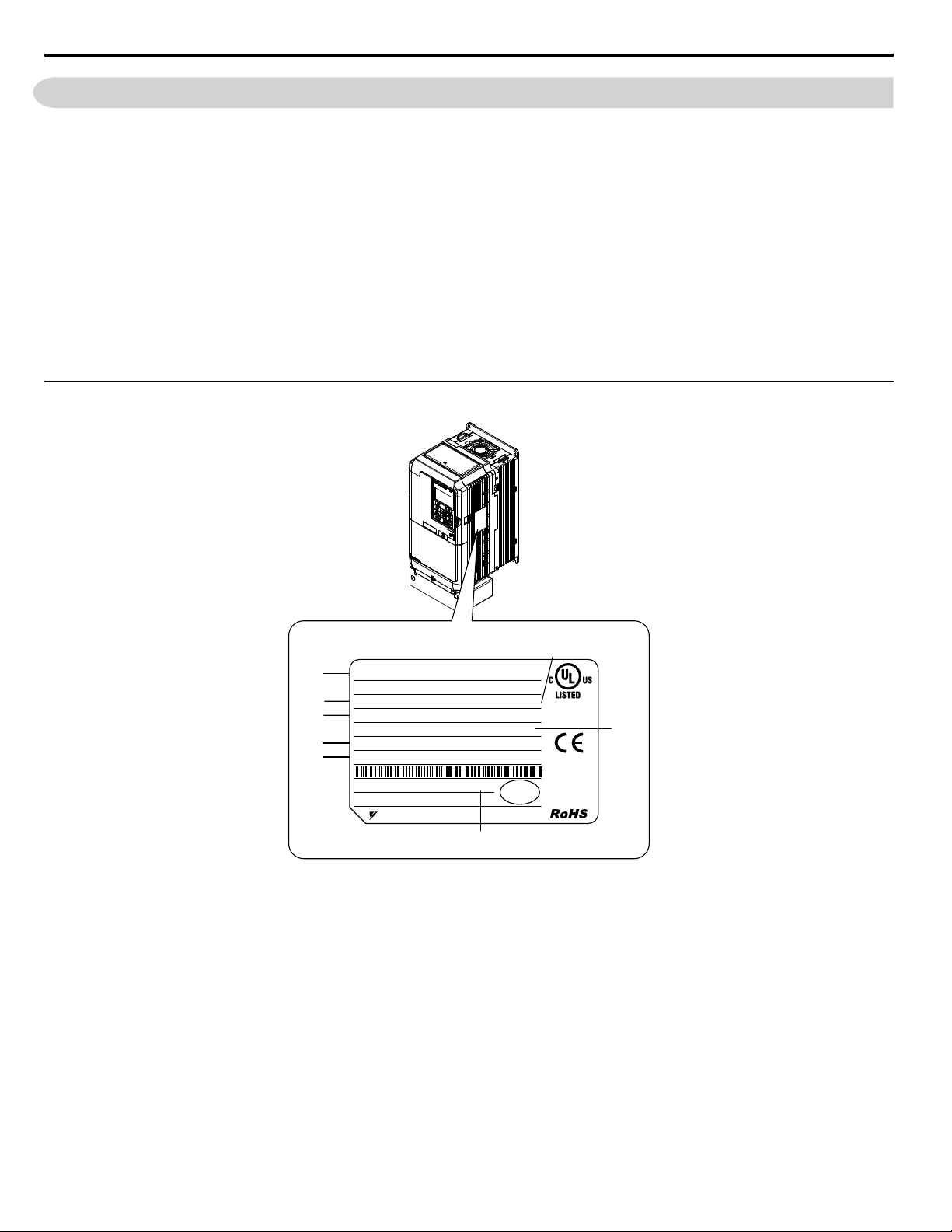
H
G
F
E
D
B
C
A
PRG : 8500
IND.CONT.EQ.
7J48 B
YASKAWA ELECTRIC CORPORATION
Assembled in USA
:
CIMR-PU2A0004FAA
PASS
MODEL
INPUT
OUTPUT
MASS
O / N
S / N
FILE NO
REV : A
: AC3PH 200-240V 50/60Hz 3. 9A
: AC3PH 0-240V 0-400Hz 3. 5A
: 3. 3 kg
:
:
: E131457 IP20
C/C
CIMR-PU2A0004FAA:
6W3050-0-100 VAJ123456
J0073D207410100
1.3 Model Numbers and Nameplate Checks
1.3 Model Numbers and Nameplate Checks
Please perform the following tasks after receiving the P1000 Bypass
• Inspect the P1000 Bypass for damage.
If the P1000 Bypass appears damaged upon receipt, contact the shipper immediately.
• Verify receipt of the correct model by checking the information on the nameplate.
• If you have received the wrong model or the P1000 Bypass does not function properly, contact your supplier.
If you find any irregularities in the above items, contact the shipping company, the distributor or representative you purchased
the P1000 Bypass from or your Yaskawa office immediately. The P1000 Bypass is thoroughly tested at the factory. Any
damages or shortages evident when the equipment is received must be reported immediately to the commercial carrier that
transported the material. Shipping damage is not covered by the Yaskawa warranty. After unpacking and inspecting for damage,
verify that internal wire connections have not come loose during shipment by spot checking wire terminations with a
screwdriver or the appropriate tool. P1000 Bypass storage must be in a clean and dry location. Maintain the factory packaging
and provide covering as needed to protect the P1000 Bypass from construction site dirt, water, debris and traffic prior to and
during construction.
u
Drive Nameplate
A – Normal Duty Amps
B – Software version
C – Enclosure type
D – Serial number
E – Lot number
F – Output specifications
G – Input specifications
H – AC drive model
Figure 1.1 Drive Nameplate Information Example
28
YASKAWA SIEP YAIP1B 01A YASKAWA AC Drive – P1000 Bypass Technical Manual
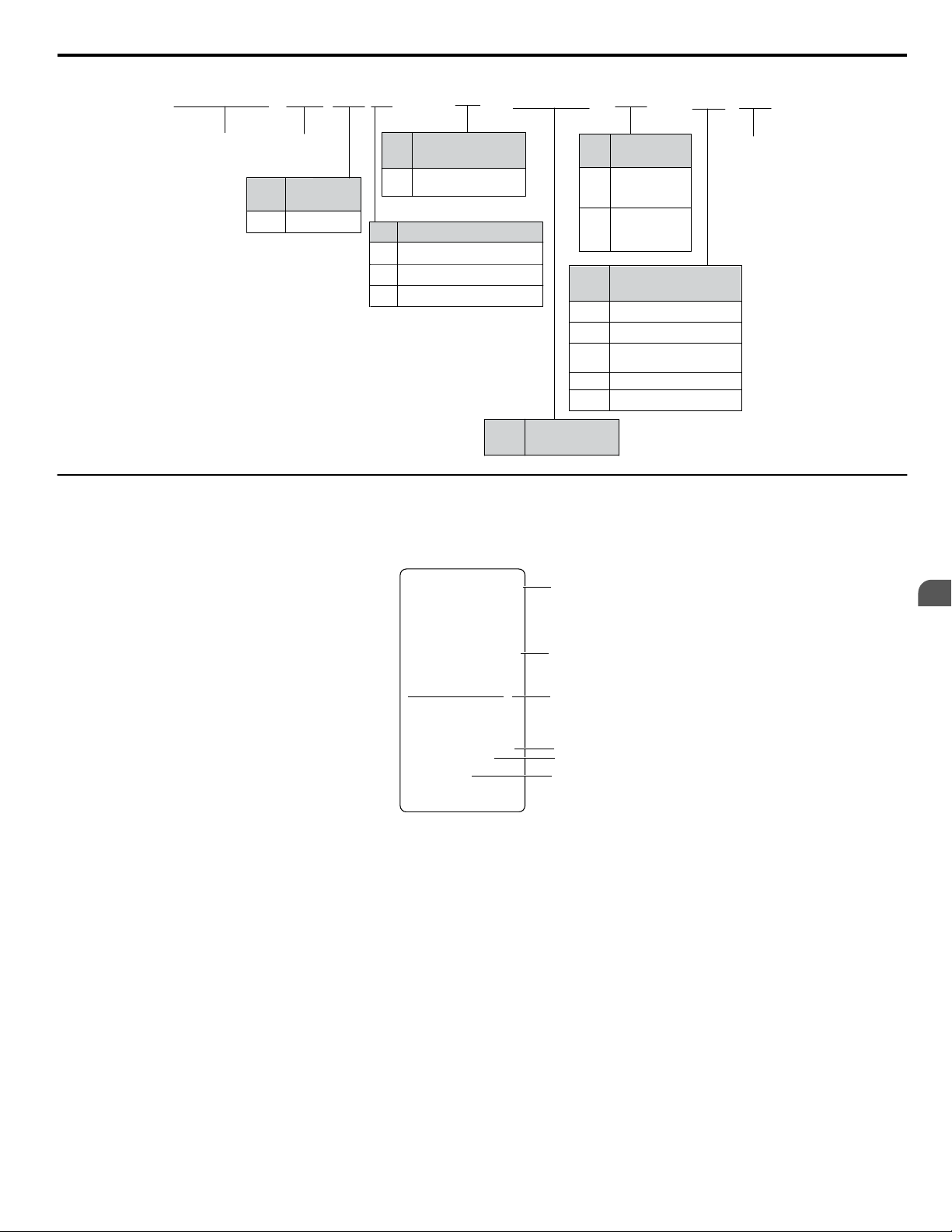
CIMR
-
P U 2 A
0021 F
A A
Drive
P1000
Series
No.
Enclosure
Type
Design
Revision
Order
No.
Customized
Specifications
A Standard model
IP00/Open
Type
F
IP20/NEMA
Type 1
A
No.
Environmental
Specification
K Gas-resistant
A
M
N
S
Standard
Humidity- and
dust-resistant
Oil-resistant
Vibration-resistant
No.
Region
Code
USA
U
No. Voltage Class
3-phase, 380-480 Vac
3-phase, 200-240 Vac
2
4
3-phase, 500-600 Vac 5
No.
Drive Model
Amp Rating
u
A
A.C. INPUT
A.C. OUTPUT
Designator Rating
Serial No.:4W11X2888880001
Model No. :P1B1D002PM
Type: P1000 BYPASS
W.D.: DS.P1B1.01
Inst. Manual:SIEPYAIP1B01,
TOECC71061615
F1,F2 FNQ-R1.5A,600V
Type
Volts: 208
Volts: 0-208
Hz: 50/60
Hz: 0-60
Phase: 3
Phase: 3
SCCR: 100kA rms sym.,208V max.
Amps: 2.9
Amps: 2.4
B
F
C
D
E
Bypass Nameplate
1.3 Model Numbers and Nameplate Checks
The nameplate is located on the inside of the P1000 Bypass enclosure door.
The nameplate shown below is an example for a standard P1000 Bypass.
YASKAWA SIEP YAIP1B 01A YASKAWA AC Drive – P1000 Bypass Technical Manual
A – Input specifications
B – Output specifications
C – Replacement fuse specifications
Figure 1.2 Bypass Nameplate Information Example
D – Serial number
E – Bypass model number
F – Schematic document number
(document included in packaging)
Receiving
1
29
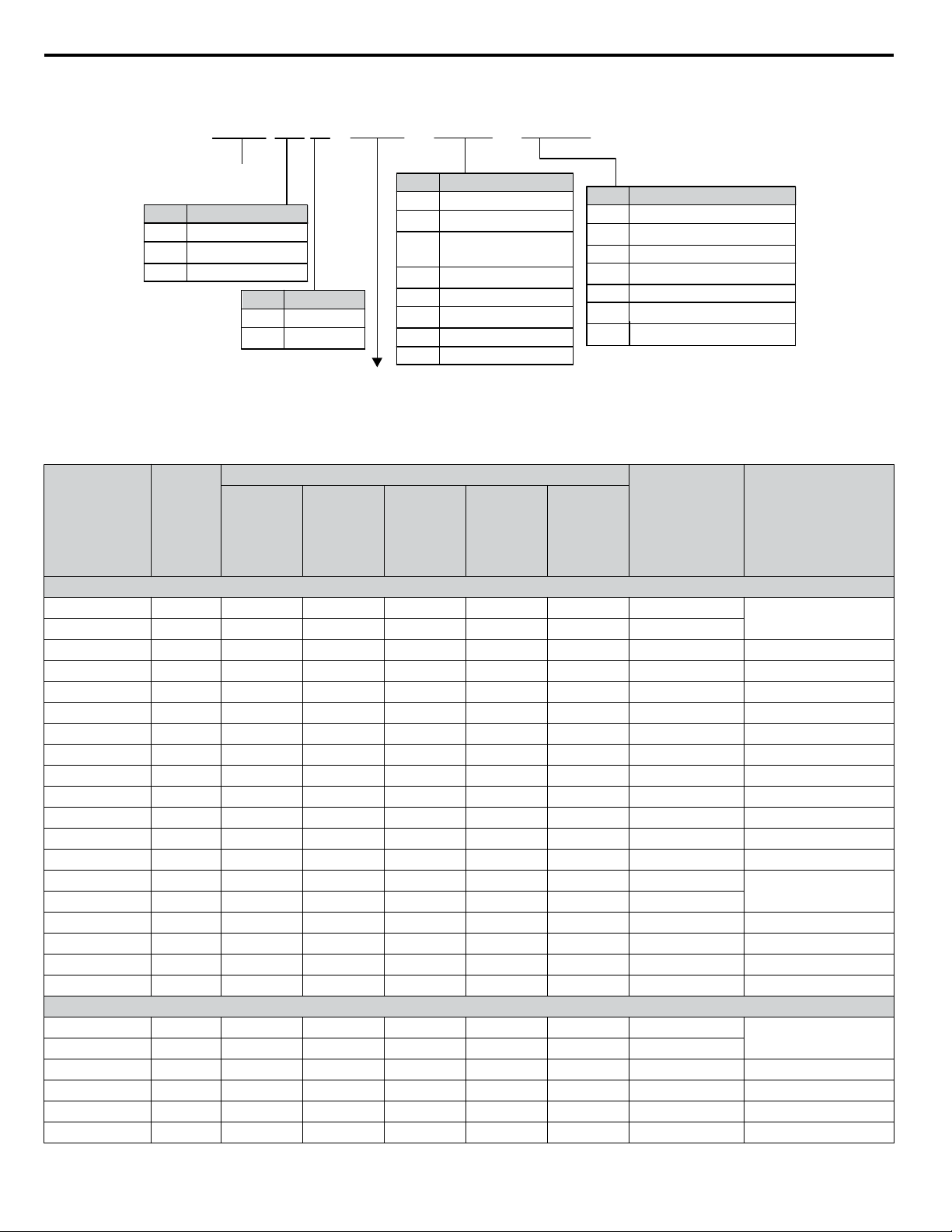
P1B 1 B
P1000
Bypass
No. Voltage
Refer to the following table
D 208 Vac
B 480 Vac
040 P T
A/K/R/X/Y
D/G/H/L/Q
W
M
No. Power Options
M
100 kA Input
Circuit Breaker
K Output Reactor 5%
A Two Motor “AND”
R Input Reactor 3%
N RFI Cap Filter
Y Two Motor “OR”
X DC Bus Reactor 3%
No. Control Options
H Profibus
G DeviceNet
D EtherNet/IP
M Keypad Viewing Window
L LonWorks
Q EtherNet MODBUS TCP/IP
No. Enclosure Type
3 NEMA Type 3R
2 NEMA Type 12
1 NEMA Type 1
3 50 ˚C Ambient
W Custom Nameplate
<1>
<1>
M
N
3
1.3 Model Numbers and Nameplate Checks
<1> Available for NEMA 3R enclosures only.
Bypass Models, Drive Models, and Capacities
n
P1B1
Bypass Model HP
D002 0.5 2.7 2.7 2.7 2.7 4.6 2.4
D003 0.75 3.9 3.9 3.9 4.6 5.8 3.5
D004 1 5.6 5.6 5.6 6.3 7.5 4.6 2A0006
D007 2 8.3 8.3 8.3 9.0 10.2 7.5 2A0008
D010 3 12.3 12.3 12.3 13.0 14.2 10.6 2A0012
D016 5 17.7 17.7 17.7 18.4 19.6 16.7 2A0018
D024 7.5 29.8 30.6 29.8 30.6 31.5 24.2 2A0030
D030 10 40.0 40.8 40.0 40.8 41.7 30.8 2A0040
D046 15 56.1 56.8 56.8 56.8 57.8 46.2 2A0056
D059 20 68.9 69.6 69.6 69.6 70.6 59.4 2A0069
D074 25 89.4 90.1 90.1 90.1 90.3 74.8 2A0081
D088 30 89.5 89.5 89.5 89.5 92.4 88.0 2A0110
D114 40 113.1 113.1 113.1 113.1 116.0 114.0 2A0138
D143 50 140.2 140.2 140.2 140.2 142.4 143.0
D169 60 165.4 165.4 165.4 165.4 167.6 169.0
D211 75 201.4 201.4 201.4 201.4 203.6 211.0 2A0211
D273 100 284.9 284.9 284.9 284.9 287.1 273.0 2A0312
D343 125 376.8 376.8 376.8 376.8 380.2 343.0 2A0360
D396 150 450.9 450.9 450.9 450.9 454.2 396.0 2A0415
B001 0.75 1.6 1.6 1.6 2.3 2.4 1.6
B002 1 2.1 2.1 2.1 2.8 2.9 2.1
B003 2 3.6 3.6 3.6 4.3 4.4 3.4 4A0004
B004 3 5.2 5.2 5.2 6.0 6.1 4.8 4A0005
B007 5 8.1 8.1 8.1 8.8 9.0 7.6 4A0009
B011 7.5 13.9 13.9 13.9 14.6 14.7 11.0 4A0011
30
Models
without
Power
Options
Models
PY Option
P1B1
with
Input (A)
P1B2 and
P1B3
Models
without
Power
P1B2
Models
with
PY Option
Options
208 Vac Bypass Drive
480 Vac Bypass Drive
YASKAWA SIEP YAIP1B 01A YASKAWA AC Drive – P1000 Bypass Technical Manual
P1B3
Models
with
P3 and PY
Options
Output (A) Drive Model
2A0004
2A0169
4A0002
Loading...