


EPSON G10-651S, G20-854S, G10-654SR, G20-854C, G10-654C User Manual [de]
...SCARA-ROBOTER
G10 / G20-Serie
MANIPULATOR HANDBUCH
Rev.3 |
EM083R1673F |
MANIPULATOR HANDBUCH |
G10 / G20-Serie Rev. 3 |
SCARA-ROBOTER
G10 / G20-Serie Manipulator Handbuch
Rev. 3
Copyright |
2007-2008 SEIKO EPSON CORPORATION. Alle Rechte vorbehalten. |
G10 / G20 Rev.3 |
i |
VORWORT
Vielen Dank, dass Sie unsere Roboterprodukte erworben haben.
Dieses Handbuch beinhaltet die erforderlichen Informationen für die richtige Bedienung des Manipulators.
Bitte lesen Sie dieses Handbuch und andere in Beziehung stehende Handbücher sorgfältig, bevor Sie das Robotersystem installieren.
Bewahren Sie dieses Handbuch so auf, dass es jederzeit griffbereit ist.
GARANTIE
Der Manipulator sowie alle Optionen werden vor Versand an den Kunden sehr strengen Qualitätskontrollen, Tests und Untersuchungen unterzogen, um sicher zu stellen, dass das System in einwandfreiem Zustand ist und unseren hohen Leistungsanforderungen genügt.
Alle Schäden bzw. Fehlfunktionen, Handhabung entstanden sind, werden repariert. (Bitte informieren Sie sich übliche Garantiezeit.)
Für die Reparatur folgender Schäden innerhalb der Garantiezeit auftreten):
die trotz normaler Betriebsbedingungen und innerhalb der normalen Garantiezeit kostenlos bei Ihrem regionalen EPSON-Vertrieb über die
muss der Kunde aufkommen (selbst wenn sie
1.Schäden oder Fehlfunktionen, die durch nachlässige Bedienung oder Bedienvorgänge verursacht wurden, welche nicht in diesem Handbuch beschrieben sind.
2.Unerlaubte kundenseitige Modifikation oder Demontage.
3.Schäden oder Fehlfunktionen, die durch unerlaubte Einstellungen oder Reparaturversuche verursacht wurden.
4.Durch Naturkatastrophen (wie z. B. Erdbeben, Wasserschäden usw.) hervorgerufene Schäden.
Warnungen, Vorsichtsgebote, Nutzung:
1.Wird der Manipulator oder mit diesem verbundene Ausrüstung außerhalb der dafür bestimmten Betriebsbedingungen und Produktspezifikationen betrieben, verfällt der Garantieanspruch.
2.Sollten Sie sich nicht an die in diesem Handbuch dargelegten Warnungen und Vorsichtsgebote halten, müssen wir die Verantwortung für Fehlfunktionen und Unfälle zurückweisen, selbst wenn diese zu Verletzungen oder Todesfolge führen.
3.Wir können nicht alle möglichen Gefahren und die daraus resultierenden Konsequenzen vorhersehen, weshalb dieses Handbuch den Nutzer nicht vor allen Gefahrmomenten warnen kann.
ii |
G10 / G20 Rev.3 |
WARENZEICHEN
Microsoft, Windows und das Windows-Logo sind Warenzeichen oder eingetragene Warenzeichen der Microsoft Corporation in den USA und / oder in anderen Ländern. Andere Marken und Produktnamen sind Warenzeichen oder eingetragene Warenzeichen der jeweiligen Inhaber.
HINWEIS
Kein Teil dieses Handbuches darf ohne Genehmigung vervielfältigt oder reproduziert werden.
Wir behalten uns vor, die in diesem Handbuch enthaltenen Informationen ohne Vorankündigung zu ändern.
Bitte benachrichtigen Sie uns, wenn Sie in diesem Handbuch Fehler finden oder uns einen inhaltsbezogenen Kommentar übermitteln wollen.
ANFRAGEN
Bei Reparaturen, Wartungsmaßnahmen oder Neueinstellungen, wenden Sie sich bitte an Ihr EPSON Service-Center.
Sollten an dieser Stelle keine Information bezüglich Ihres Service-Centers angegeben sein, wenden Sie sich bitte an Ihren regionalen EPSON-Vertrieb.
Bitte halten Sie folgende Informationen bereit, wenn Sie sich an uns wenden.
-Das Steuerungsmodell und die Seriennummer
-Das Manipulatormodell und die Seriennummer
-Die Softwareversion Ihres Roboters
-Die Beschreibung des Problems
SERVICE-CENTER
G10 / G20 Rev.3 |
iii |
HERSTELLER UND LIEFERANTEN
Japan & Andere |
SEIKO EPSON CORPORATION |
|
Suwa Minami Plant |
|
Factory Automation Systems Dept. |
|
1010 Fujimi, Fujimi-machi, |
|
Suwa-gun, Nagano, 399-0295 |
|
JAPAN |
|
TEL : : +81-(0)266-61-1802 |
|
FAX : : +81-(0)266-61-1846 |
LIEFERANTEN
Nord- & Südamerika EPSON AMERICA, INC.
|
Factory Automation/Robotics |
|
18300 Central Avenue |
|
Carson, CA 90746 |
|
USA |
|
TEL : : +1-562-290-5900 |
|
FAX : : +1-562-290-5999 |
|
E-MAIL: : info@robots.epson.com |
Europa |
EPSON DEUTSCHLAND GmbH |
|
Factory Automation Division |
|
Otto-Hahn-Str.4 |
|
D-40670 Meerbusch |
|
Deutschland |
|
TEL : : +49-(0)-2159-538-1391 |
|
FAX : : +49-(0)-2159-538-3170 |
|
E-MAIL: : robot.infos@epson.de |
iv |
G10 / G20 Rev.3 |

Bevor Sie das Handbuch lesen…
In diesem Abschnitt finden Sie die Informationen, die Sie benötigen, bevor Sie dieses Handbuch lesen.
Zusammensetzung des Steuerungssystems
Manipulatoren der G10 / G20-Serie können mit den folgenden Kombinationen aus Steuerungen und Software betrieben werden.
Die Betriebs-Methoden und Beschreibungen sind abhängig davon, welche Software Sie verwenden, unterschiedlich. Die folgenden Zeichen sind bei Bedarf neben dem entsprechenden Text eingefügt. Verwenden Sie die Beschreibungen, die Ihre verwendete Software betreffen.
Steuerung : RC180
Software : EPSON RC+ 5.0 Ver. 5.2 oder höher
Für Details zu den Befehlen, sehen Sie bitte im Benutzerhandbuch oder in der "Online-Hilfe" nach.
Steuerung EIN/AUS schalten
Wenn Sie die Anweisung „Die Steuerung EIN/AUS schalten“ in diesem Handbuch sehen, schalten Sie alle Hardwarekomponenten EIN/AUS. Für die Zusammensetzung des Steuerungssystems lesen Sie die Tabelle oben.
Form der Motoren
Die Form der Motoren, die für Ihren verwendeten Manipulator benutzt werden, kann sich aufgrund der technischen Bedingungen von der Form der Motoren unterscheiden, die in diesem Handbuch beschrieben werden.
Einstellungen in der Software
In diesem Handbuch werden Einstellungen beschrieben, die in der Software vorgenommen werden. Die betreffenden Textabschnitte sind mit dem folgenden Icon markiert.
EPSON
RC+
G10 / G20 Rev.3 |
v |
vi |
G10 / G20 Rev.3 |
INHALTSVERZEICHNIS
Bevor Sie das Handbuch lesen… .................................................................... |
v |
Einrichten und Betrieb
1. Sicherheit (Safety) |
3 |
|
1.1 |
Konventionen........................................................................................... |
3 |
1.2 |
Konstruktion und Installations sicherheit.................................................. |
4 |
1.3 |
Betriebssicherheit .................................................................................... |
5 |
1.4 |
Not-Aus.................................................................................................... |
7 |
1.5 |
Manuelle Manipulatorbewegung im Not-Aus-Modus ............................... |
8 |
1.6 |
Beschriftungen am Manipulator ............................................................... |
9 |
2. Spezifikationen |
11 |
||
2.1 |
Eigenschaften der Manipulatoren der G10und der G20-Serie |
.............11 |
|
2.2 |
Modellbezeichnung und Modellunterschiede......................................... |
12 |
|
2.3 |
Bauteilenamen und Außenabmessungen .............................................. |
14 |
|
|
2.3.1 |
Tischplattenmontage.................................................................. |
14 |
|
2.3.2 |
Wandmontage............................................................................ |
20 |
|
2.3.3 |
Deckenmontage......................................................................... |
26 |
2.4 |
Spezifikationen ...................................................................................... |
32 |
|
2.5 |
Einstellen des Modells........................................................................... |
36 |
|
3. Umgebungen und Installation |
37 |
||
3.1 |
Umgebungsbedingungen....................................................................... |
37 |
|
3.2 |
Basis-Tisch ............................................................................................ |
39 |
|
3.3 |
Montageabmessungen .......................................................................... |
40 |
|
3.4 |
Auspacken und Transport...................................................................... |
43 |
|
|
3.4.1 Sicherheitsvorkehrungen für den Transport ............................... |
43 |
|
|
3.4.2 |
Transport.................................................................................... |
44 |
3.5 |
Installationsvorgang............................................................................... |
45 |
|
|
3.5.1 |
Tischplattenmontage.................................................................. |
45 |
|
3.5.2 |
Wandmontage............................................................................ |
46 |
|
3.5.3 |
Deckenmontage......................................................................... |
47 |
|
3.5.4 |
Reinraum-Modell........................................................................ |
48 |
|
3.5.5 |
Protected-Modell........................................................................ |
48 |
3.6 |
Anschluss der Kabel.............................................................................. |
49 |
|
3.7 |
Anwenderkabel und Pneumatikschläuche ............................................. |
52 |
|
3.8 |
Standortwechsel und Lagerung ............................................................. |
55 |
|
|
3.8.1 Vorkehrungen für Standortwechsel und Lagerung ..................... |
55 |
|
|
3.8.2 |
Tischplattenmontage.................................................................. |
56 |
|
3.8.3 |
Wandmontage............................................................................ |
57 |
|
3.8.4 |
Deckenmontage......................................................................... |
58 |
G10 / G20 Rev.3 |
vii |
INHALTSVERZEICHNIS |
|
|
4. Einstellung des Greifers |
59 |
|
4.1 |
Anbringen eines Greifers ...................................................................... |
59 |
4.2 |
Anbringen der Kameras und Ventile...................................................... |
61 |
4.3 |
Einstellen von Weight (Gewicht) und Inertia (Trägheit) ......................... |
62 |
|
4.3.1 Einstellen von Weight (Gewicht)................................................ |
62 |
|
4.3.2 Einstellen von Inertia (Trägheit)................................................. |
66 |
4.4Vorkehrungen für die Auto-Beschleunigung/Verzögerung der 3. Achse ... 71
5. Arbeitsbereich |
72 |
|
5.1 |
Einstellung des Arbeitsbereiches durch den Pulse-Bereich |
|
|
(für alle Achsen).................................................................................... |
73 |
|
5.1.1 Max. Pulse-Bereich der 1. Achse ................................................. |
73 |
|
5.1.2 Max. Pulse-Bereich der 2. Achse ................................................. |
74 |
|
5.1.3 Max. Pulse-Bereich der 3. Achse ................................................. |
75 |
|
5.1.4 Max. Pulse-Bereich der 4. Achse ............................................... |
75 |
5.2 |
Arbeitsbereich-Einstellung durch mechanische Stopper ....................... |
76 |
|
5.2.1 Einstellen der mechanischen Stopper |
|
|
der 1. Achse und der 2. Achse ..................................................... |
78 |
|
5.2.2 Einstellen des mechanischen Stoppers der 3. Achse................... |
81 |
5.3 Einstellen des kartesischen (rechteckigen) Bereichs im X, |
|
|
|
Y-Koordinatensystem des Manipulators (für 1. und 2. Achse) .............. |
84 |
5.4 |
Standard Arbeitsbereich ........................................................................ |
85 |
Wartung und Ersatzteilliste
1. |
Sicherheit Wartung |
90 |
|
|
|
|
|
2. |
Allgemeine Wartung |
92 |
|
|
2.1 |
Zeitplan für die Inspektion ..................................................................... |
92 |
|
2.2 |
Inspektionspunkt ................................................................................... |
93 |
2.2.1Inspektion während der Strom AUSgeschaltet ist
(Manipulator außer Betrieb) ...................................................... |
93 |
2.2.2Inspektion während der Strom EINgeschaltet ist
|
(der Manipulator arbeitet) .......................................................... |
94 |
2.3 |
Schmieren............................................................................................. |
95 |
2.4 |
Festziehen der Innensechskantschrauben............................................ |
97 |
2.5 |
Anpassen der Ursprungspositionen ...................................................... |
98 |
2.6 |
Anordnung der Ersatzteile..................................................................... |
99 |
viii |
G10 / G20 Rev.3 |
3. Abdeckungen |
101 |
|
3.1 |
Obere Arm-Abdeckung ........................................................................ |
102 |
3.2 |
Untere Armabdeckung ......................................................................... |
104 |
3.3 |
Abdeckung 1. Arm ............................................................................... |
105 |
3.4 |
Anschlussplatte ................................................................................... |
106 |
3.5 |
Kabeldurchführungsplatte.................................................................... |
107 |
3.6 |
Anwender-Anschlusseinheit ................................................................ |
108 |
3.7 |
Wartungsplatte..................................................................................... |
109 |
3.8 |
Untere Sockelabdeckung..................................................................... |
109 |
4. Kabeleinheit |
110 |
||
4.1 |
Austauschen der Kabeleinheit |
.............................................................. 111 |
|
4.2 |
Verkabelungspläne............................................................................... |
119 |
|
|
4.2.1 |
Signalkabel ............................................................................... |
119 |
|
4.2.2 |
Stromkabel................................................................................ |
120 |
|
4.2.3 |
Anwenderkabel ......................................................................... |
121 |
5. |
1. Achse |
122 |
|
|
5.1 |
Austausch des Motors der 1. Achse ..................................................... |
123 |
|
5.2 |
Austausch des Untersetzungsgetriebes der 1. Achse .......................... |
125 |
6. |
2. Achse |
127 |
|
|
6.1 |
Austausch des Motors der 2. Achse ..................................................... |
128 |
|
6.2 |
Austausch des Untersetzungsgetriebes der 2. Achse .......................... |
131 |
7. |
3. Achse |
133 |
|
|
7.1 |
Austausch des Motors der 3. Achse ..................................................... |
134 |
|
7.2 |
Austausch des Zahnriemens ................................................................ |
138 |
|
|
7.2.1 Austausch des Zahnriemens: G10............................................ |
138 |
|
|
7.2.2 Austausch des Zahnriemens: G20............................................ |
142 |
|
7.3 |
Austausch der Bremse ......................................................................... |
143 |
8. |
4. Achse |
145 |
|
|
8.1 |
Austausch des Motors der 4. Achse ..................................................... |
146 |
|
|
8.1.1 Austausch des Motors der 4. Achse: G10................................. |
146 |
|
|
8.1.2 Austausch des Motors der 4. Achse: G20................................. |
150 |
|
8.2 |
Austausch des Zahnriemens ................................................................ |
152 |
|
|
8.2.1 Austausch des Zahnriemens: G10............................................ |
152 |
|
|
8.2.2 Austausch des Zahnriemens: G20............................................ |
156 |
|
8.3 |
Austausch der Bremse ......................................................................... |
160 |
|
8.4 |
Austausch des Untersetzungsgetriebes ............................................... |
163 |
|
|
8.4.1 Austausch des Untersetzungsgetriebes (Getriebe): G10.......... |
163 |
|
|
8.4.2 Austausch des Untersetzungsgetriebes: G20........................... |
165 |
9. |
Faltenbälge |
167 |
|
G10 / G20 Rev.3 |
|
|
ix |

INHALTSVERZEICHNIS
10. Kugelumlaufspindel |
170 |
|
10.1 |
Schmieren der Kugelumlaufspindel ..................................................... |
172 |
|
10.1.1 Standard-Modell (S-Typ) ........................................................ |
172 |
|
10.1.2 Reinraum-Modell / Protected-Modell |
|
|
(C-Typ / D-Typ mit Faltenbalg / P-Typ) .................................... |
173 |
10.2 |
Austausch der Kugelumlaufspindel...................................................... |
175 |
|
10.2.1 Austausch der Kugelumlaufspindel: G10 ............................... |
175 |
|
10.2.2 Austausch der Kugelumlaufspindel: G20 ............................... |
181 |
11. |
Lithium-Batterie |
186 |
|
11.1 Austausch der Batterie (Lithium-Batterie) |
............................................ 187 |
||
11.2 Austausch des Batterie-Boards ........................................................... |
189 |
||
|
|
|
|
12. |
LED-Lampe |
191 |
|
|
|
|
|
13. |
Kalibrierung |
193 |
|
13.1 |
Über die Kalibrierung......................................................................... |
193 |
|
13.2 |
Kalibrierungsverfahren ...................................................................... |
194 |
|
13.3 |
Genaue Kalibrierung der 2. Achse..................................................... |
201 |
|
|
|
|
|
14. |
Ersatzteilliste |
203 |
|
14.1 |
Teile aller Modelle.............................................................................. |
203 |
|
14.2 |
Teile je Modell.................................................................................... |
204 |
|
x |
G10 / G20 Rev.3 |

Einrichten und Betrieb
Dieser Band beinhaltet Informationen über das Einrichten und den Betrieb der Manipulatoren der G10 / G20-Serie.
Bitte lesen Sie dieses Handbuch gründlich, bevor Sie den Manipulator einrichten und betreiben.
Einrichten und Betrieb 1. Sicherheitshinweise
1. Sicherheit (Safety)
Die Installation sowie der Transport von Robotern und Roboterausrüstung darf nur von qualifiziertem Personal in Übereinstimmung mit nationalen und örtlichen Vorschriften durchgeführt werden. Lesen Sie dieses Handbuch und andere in Beziehung stehende Handbücher, bevor Sie das Robotersystem installieren oder bevor Sie Kabel anschließen.
Bewahren Sie dieses Handbuch so auf, dass es jederzeit griffbereit ist.
1.1 Konventionen
Wichtige Sicherheitsaspekte sind in diesem Handbuch durch folgende Symbole gekennzeichnet. Lesen Sie die Beschreibungen zu jedem Symbol.
|
Dieses Symbol weist Sie auf die Gefahr schwerer |
|
Verletzungen oder Lebensgefahr hin, die besteht, wenn |
WARNUNG |
die zugehörigen Anweisungen nicht befolgt werden. |
|
|
|
|
|
Dieses Symbol weist Sie auf die Gefahr möglicher |
|
schwerster Verletzung oder Todesfolge durch elektrischen |
|
Schlag hin, die besteht, wenn diese Anweisungen nicht |
WARNUNG |
richtig befolgt werden. |
|
|
|
Dieses Symbol weist Sie auf mögliche Personenoder |
|
Sachschäden an der Ausrüstung oder am System hin, die |
|
entstehen können, wenn die zugehörigen Anweisungen |
VORSICHT |
nicht befolgt werden. |
|
|
G10 / G20 Rev.3 |
3 |
Einrichten und Betrieb 1. Sicherheitshinweise
1.2Konstruktion und Installationssicherheit
Nur geschultes Personal darf das Robotersystem zusammenbauen und installieren. Geschultes Personal ist Personal, das an Robotersystemschulungen und Wartungsschulungen teilgenommen hat, die durch den Hersteller, Händler oder örtlich einbezogene Firmen abgehalten werden. Geschultes Personal ist auch das Personal, das die Handbücher vollständig versteht und über das Wissen und die Qualifikationen verfügt, welche dem Stand des Personals entsprechen, das an den Schulungen teilgenommen hat.
Um Sicherheit zu gewährleisten, muss eine Sicherheitsabschrankung für das Robotersystem installiert werden. Für nähere Informationen zur Sicherheitsabschrankung lesen Sie den Abschnitt Vorkehrungen für die Installation und den Aufbau im Kapitel Sicherheit im EPSON RC+ Benutzerhandbuch.
In den folgenden Abschnitten werden Sicherheitsvorkehrungen für das Konstruktionspersonal beschrieben:
■Personal, welches das Robotersystem mit diesem Produkt gestaltet und / oder konstruiert, muss das Kapitel Sicherheit im EPSON RC+ Benutzerhandbuch lesen, um die Sicherheitsanforderungen zu verstehen, bevor es das Robotersystem gestaltet oder konstruiert. Der Zusammenbau und / oder die Konstruktion des Robotersystems ohne die Sicherheitsanforderungen zu verstehen, ist extrem gefährlich. Dies kann schwere Verletzungen und / oder Schäden am Robotersystem zur Folge haben und ernste Sicherheitsprobleme verursachen.
■Der Manipulator und die Steuerung müssen mit den Umgebungsbedingungen betrieben werden, die in den entsprechenden Handbüchern beschrieben werden.
WARNUNG |
Dieses Produkt ist ausschließlich für den Gebrauch in normaler |
Innenraumumgebung entworfen und hergestellt worden. Die Verwendung des |
|
|
Produkts in einer Umgebung mit anderen als den vorgegebenen |
|
Umgebungsbedingungen kann nicht nur die Lebensdauer des Produkts |
|
verkürzen, sondern auch ernste Sicherheitsprobleme verursachen. |
■Das Robotersystem muss gemäß der Installationsanforderungen verwendet werden, die in den Handbüchern beschrieben werden. Die Verwendung des Robotersystems unter Nichterfüllung der Installationsanforderungen kann nicht nur die Lebensdauer des Produkts verkürzen, sondern auch ernste Sicherheitsprobleme verursachen.
Weitere Vorkehrungen für die Installation sind im Kapitel Einrichten und Betrieb beschrieben: 3. Umgebungen und Installation. Bitte lesen Sie dieses Kapitel vor der Installation der Roboter und der Roboterausrüstung sorgfältig durch, damit Sie mit den Sicherheitsvorkehrungen bei der Installation vertraut sind.
4 |
G10 / G20 Rev.3 |
Einrichten und Betrieb 1. Sicherheitshinweise
1.3Betriebssicherheit
In den folgenden Abschnitten werden Sicherheitsvorkehrungen für qualifiziertes Bedienpersonal beschrieben:
■Bitte lesen Sie sorgfältig den Abschnitt Sicherheitsbezogenen Anforderungen im Kapitel Sicherheit des EPSON RC+ Benutzerhandbuchsdurch, bevor Sie das Robotersystem in Betrieb nehmen. Der Betrieb des Robotersystems, ohne die Sicherheitsanforderungen zu verstehen, ist extrem gefährlich und kann zu schweren Verletzungen und / oder schweren Schäden an Geräten des Robotersystem führen.
■Betreten Sie den Arbeitsbereich des Manipulators nicht, während der Strom für das Robotersystem eingeschaltet ist. Das Betreten des Arbeitsbereichs bei
eingeschaltetem Strom ist extrem gefährlich und kann ernste Sicherheitsprobleme verursachen, da sich der Manipulator bewegen kann, auch wenn es so aussieht, als wäre er angehalten.
■ Bevor Sie das Robotersystem betreiben, stellen Sie sicher, dass sich niemand WARNUNG innerhalb der Sicherheitsabschrankung aufhält. Das Robotersystem kann im Teach-Modus betrieben werden, auch wenn sich jemand innerhalb der
Sicherheitsabschrankung aufhält.
Die Bewegung des Manipulators findet immer im begrenzten Status (niedrige Geschwindigkeiten und Low Power) statt, um die Sicherheit des Bedieners nicht zu gefährden. Während sich jemand im geschützten Bereich befindet, ist der Betrieb des Manipulators extrem gefährlich und kann ernste Sicherheitsprobleme verursachen, wenn der Manipulator sich unerwartet bewegt.
■Drücken Sie den Not-Aus-Taster, wann immer sich der Manipulator während des Robotersystem-Betriebes unnormal bewegt.
■Um die Spannungsversorgung des Robotersystems abzustellen, ziehen Sie den Netzstecker aus der Steckdose. Schließen Sie das Netzanschlusskabel an eine geeignete Netzsteckdose an. Schließen Sie es NICHT direkt an die Fabrik-Spannungsversorgung an.
■Bevor Sie einen Auswechselvorgang durchführen, schalten Sie die Steuerung und die damit zusammenhängende Ausrüstung AUS und trennen Sie dann den Netzstecker von der Spannungsversorgung. Das Ausführen eines Austauschs
|
bei EINgeschalteter Spannung ist extrem gefährlich und kann zu einem |
WARNUNG |
elektrischen Schlag und/oder zur Fehlfunktion des Robotersystems führen. |
|
■Die Motorstecker dürfen nicht abgezogen oder eingesteckt werden, solange Spannung am Robotersystem anliegt. Das Einstecken oder Herausziehen der Motorstecker bei anliegender Spannung ist extrem gefährlich und kann zu schweren körperlichen Verletzungen führen, da sich der Manipulator unnormal bewegen kann. Es kann auch zu einem elektrischen Schlag und / oder Fehlfunktion des Robotersystems führen.
G10 / G20 Rev.3 |
5 |
Einrichten und Betrieb 1. Sicherheitshinweise
■Wann immer möglich, sollte nur eine Person das Robotersystem betreiben. Wenn es erforderlich ist, das Robotersystem mit mehr als einer Person zu betreiben, stellen Sie sicher, dass alle beteiligten Personen miteinander darüber
VORSICHT |
kommunizieren, was sie tun, und treffen Sie alle nötigen |
|
Sicherheitsvorkehrungen. |
||
|
6 |
G10 / G20 Rev.3 |
Einrichten und Betrieb 1. Sicherheitshinweise
1.4 Not-Aus
Wenn sich der Manipulator während des Betriebes unnormal bewegt, drücken Sie sofort den Not-Aus-Taster. Der Taster stoppt die Stromversorgung des Motors, sodass der Arm so schnell wie möglich mithilfe der generatorischen Bremse und der mechanischen Bremse angehalten wird.
Vermeiden Sie es jedoch, den Not-Aus-Taster unnötig zu drücken, während der Manipulator normal arbeitet. Andernfalls kann der Manipulator gegen die Peripheriegeräte schlagen, da sich die Bewegungsbahn während des Anhaltens des Robotersystems von der Bewegungsbahn im normalen Betrieb unterscheidet.
Um das System während des normalen Betriebes in den Not-Aus-Modus zu versetzen, betätigen Sie den Not-Aus-Taster, wenn sich der Manipulator nicht bewegt.
Lesen Sie im Steuerungshandbuch nach, wie der Not-Aus-Stromkreis zu verdrahten ist.
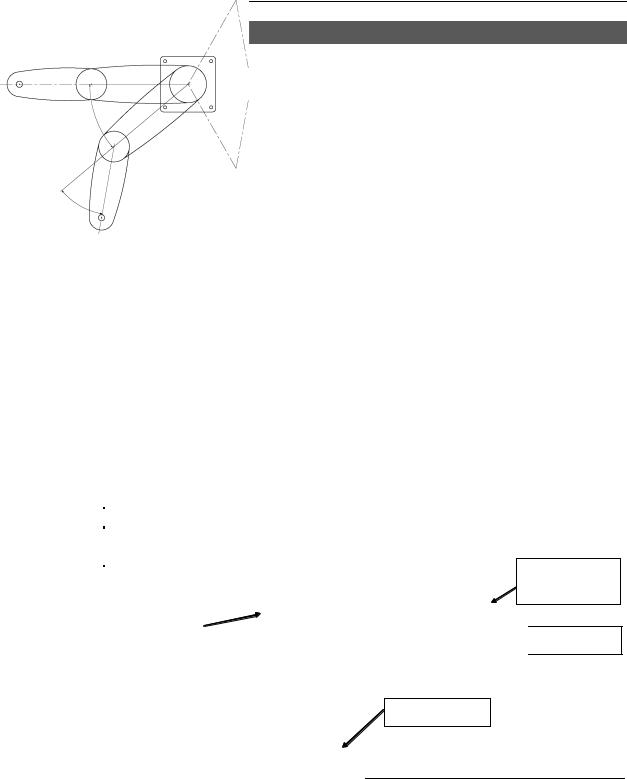
Freischwingende Strecke beim Not-Aus
Der betriebene Manipulator kann nicht unmittelbar, nachdem der Not-Aus-Taster gedrückt wurde, anhalten.
Die freie Laufzeit / -weite und der freie Laufwinkel des Manipulators sind unten
dargestellt. |
Beachten Sie jedoch, dass die Werte abhängig von den folgenden |
|||
Bedingungen variieren. |
|
|
|
|
Gewicht des Greifers |
Gewicht des Werkstücks |
Arbeitsposition |
|
|
Weight |
Speed |
Accel |
etc. |
|
Messbedingungen
|
|
|
G10 |
G20 |
|
|
|
|
|
|
|
|
|
|
|
Accel-Einstellung |
100 |
100 |
|
|
|
|
|
|
|
Speed-Einstellung |
100 |
100 |
|
|
|
|
|
|
|
Last [kg] |
10 |
20 |
|
|
|
|
|
|
|
Weight-Einstellung |
10 |
20 |
|
|
|
|
|
|
|
|
|
|
|
|
Stelle, an der das |
|
|
|
|
Not-Halt-Signal |
|
|
1. Achse |
|
eingegeben wird |
|
|
|
|
|
|
|
|
Startposition der Bewegung
 Zielpunkt
Zielpunkt
Stoppposition
|
|
2. Achse |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Steuerung |
|
|
|
|
|
RC180 |
|
|
Manipulator |
|
|
|
G10-65*** |
G10-85*** |
G20-85*** |
G20-A0*** |
|
Freie Laufzeit |
1. |
+ 2. Achse |
[s] |
0,6 |
0,7 |
|
1.0 |
1,3 |
|
3. |
Achse |
[s] |
0,6 |
0,5 |
|
0,5 |
0,8 |
Freier |
1. |
Achse |
[Grad] |
80 |
70 |
|
80 |
110 |
Laufwinkel |
2. |
Achse |
[Grad] |
70 |
50 |
|
40 |
50 |
|
1. |
+ 2. Achse |
[Grad] |
110 |
120 |
|
110 |
160 |
Freischwingende |
3. |
Achse G10/G20-**1** [mm] |
90 |
80 |
|
70 |
90 |
|
Strecke |
|
G10/G20-**4** |
210 |
160 |
|
200 |
170 |
|
G10 / G20 Rev.3 |
7 |
Einrichten und Betrieb 1. Sicherheitshinweise
1.5Manuelle Manipulatorbewegung im Not-Aus-Modus
Wenn sich das System im Not-Aus-Modus befindet, bewegen Sie den Arm oder die Achse des Manipulators wie unten beschrieben.
1. Arm |
Bewegen Sie den Arm manuell. |
|
|
|||
2. Arm |
Bewegen Sie den Arm manuell. |
|
|
|||
3. Achse |
Die Achse kann nicht manuell aufoder abbewegt werden, solange die |
|||||
|
|
elektromagnetische Bremse der Achse nicht gelöst wird. Drücken Sie |
||||
|
|
den Bremsfreigabetaster und bewegen Sie die 3. Achse auf/ab. |
||||
4. Achse |
Die Z-Achse kann nicht manuell gedreht werden, solange die |
|||||
|
|
elektromagnetische Bremse der Z-Achse nicht gelöst wurde. |
||||
|
|
Bewegen Sie die Z-Achse, während Sie gleichzeitig den |
||||
|
|
Bremsfreigabetaster drücken. |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
2. Achse |
1. Achse |
|
|
|
3. und 4. Achse |
− |
(dreht) |
||
|
|
|
(dreht) |
|||
|
Bremsfreigabetaster |
|
||||
|
|
+ |
|
|
||
|
|
|
|
− |
||
|
|
|
|
|
||
|
|
|
|
|
+ |
|
|
|
|
|
|
1. Arm |
|
2. Arm
 Sockel
Sockel
|
+ |
|
3. Achse |
Z-Achse |
|
(auf und ab) |
||
− − |
||
|
||
|
+ |
|
|
4. Achse |
|
|
(dreht) |
HINWEIS Der Bremsfreigabetaster ist mit den Bremsen der 3. und der 4. Achse verbunden. Wenn
)dieser Taster im Not-Aus-Modus betätigt wird, werden gleichzeitig die Bremsen beider Achsen gelöst.
Seien Sie vorsichtig, da sich die Z-Achse während der Betätigung des Bremsfreigabetasters aufgrund des Gewichts eines Greifers absenken bzw. drehen kann.
8 |
G10 / G20 Rev.3 |
Einrichten und Betrieb 1. Sicherheitshinweise
1.6Beschriftungen am Manipulator
Die folgenden Aufkleber sind in der Nähe von Stellen am Manipulator angebracht, an denen besondere Gefahr besteht.
Befolgen Sie die Beschreibungen und Warnungen auf den Aufklebern, um den Manipulator sicher zu betreiben und zu warten.
Reißen Sie die Aufkleber nicht ab, beschädigen oder entfernen Sie sie nicht. Seien Sie äußerst sorgsam, wenn Sie mit den Teilen oder Einheiten arbeiten, an welchen die folgenden Aufkleber angebracht sind, oder wenn Sie sich in deren Nähe befinden:
Position der |
Labels |
|
Aufkleber |
|
|
|
|
|
A |
|
|
|
|
|
B
C
D
E
HINWEIS
Bevor Sie die Sockel-Befestigungsschrauben lösen, halten Sie den Arm und binden Sie ihn fest, um Hände und Finger davor zu schützen, im Manipulator eingeklemmt zu werden.
Es besteht gefährliche Spannung, während der Manipulator eingeschaltet ist. Um einen elektrischen Schlag zu vermeiden, berühren Sie keine inneren elektrischen Teile.
Wenn sie zu nah an bewegliche Teile kommen, können Hand oder Finger zwischen Z-Achse und Abdeckung gequetscht werden.
Nur autorisiertes Personal darf einen hängenden Transport durchführen und einen Kran bedienen. Das Ausführen dieser Tätigkeiten von nicht autorisiertem Personal ist extrem gefährlich und kann zu schweren Verletzungen und / oder Schäden an Geräten des Robotersystems führen.
HINWEIS Auf Manipulatoren mit Faltenbälgen ist der Aufkleber D als Warnung vor einer
)Quetschgefahr für Hand und Finger nicht angebracht.
G10 / G20 Rev.3 |
9 |
Einrichten und Betrieb 1. Sicherheitshinweise
Tischplattenmontage: G10/G20-****
C
E
D
 B
B
 A C
A C
Wandmontage: G10/G20-****W
C
A
B
D
Deckenmontage: G10/G20-****R
A
C
C
B
D
10 |
G10 / G20 Rev.3 |

Einrichten und Betrieb 2. Spezifikationen
2.Spezifikationen
2.1Eigenschaften der Manipulatoren der G10und der G20-Serie
Die Manipulatoren der G10und der G20-Serie sind Hochleistungs-Manipulatoren, die für hohe Geschwindigkeit, hohe Genauigkeit, Platzeinsparung und ein sehr gutes Preis-Leistungsverhältnis stehen.
Die Manipulatoren der G10-Serie sind für den schnellen Zusammenbau und die schnelle Handhabung mit einem Mehrfachgreifer optimiert.
Die Manipulatoren der G20-Serie sind für den Transfer von hohen Nutzlasten und das Anordnen von Verpackungen optimiert. Durch den 1000 mm langen Arm der Manipulatoren der G20-Serie ist der Arbeitsbereich sehr groß.
Die Manipulatoren der G10und der G20-Serie haben folgende Eigenschaften:
Kompatibilität mit Manipulatoren der E2H-Serie (unsere Modelle)
Die Installationsart und die Montageabmessungen des Greifers sind mit denen der Manipulatoren der E2H-Serie kompatibel (unsere Modelle).
Platzeinsparung
Kompakt durch Ausführung ohne Schläuche.
Reduzierung der Höhe des Systems durch den neuen Kurzhub (Z: 180 mm).
Erweiterter Arbeitsbereich
Der Arbeitsbereich wurde gegenüber der E2-Serie um 20 % erweitert.
Verbesserte Leistung
Die Anzahl der Anwenderkabel und der Pneumatikschläuche wurde erhöht.
Die Geschwindigkeit der 1., 2., 3. und 4. Achse wurde erhöht.
Die Zykluszeit wurde verbessert.
Erhöhte Nutzlast
Die Nutzlast wurde erhöht, damit der Manipulator für eine höhere Arbeitsbelastung geeignet ist.
G10: Max. 10 kg G20: Max. 20 kg
Erhöhte Trägheit
Die Kapazität des Greifers wurde erhöht, sodass Mehrfachgreifer mit mehr Greifern installiert werden konnten, die verschiedene Arten und Formen von Werkstücken halten.
Das zulässige Trägheitsmoment wurde entsprechend der Last erhöht. G10: Max. 0,25 kgm2
G20: Max. 0,45 kgm2
Verfügbar in verschiedenen Modellen
Langhub (Z: 420 mm)
Kurzhub (Z: 180 mm)
G10 / G20 Rev.3 |
11 |
Einrichten und Betrieb 2. Spezifikationen
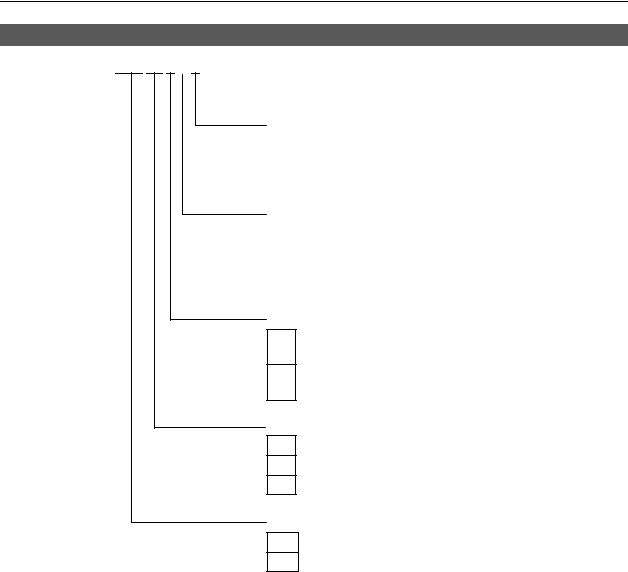
2.2 Modellbezeichnung und Modellunterschiede
G10-85 4 S □
Typ
□ |
: Tischplattenmontage |
W |
: Wandmontage |
R |
: Deckenmontage |
Umgebung
S |
: Standard |
|
C |
: Reinraum |
|
D |
: Protected |
: IP54 (mit Faltenbalg-Option) |
P |
: Protected |
: IP65 |
3. Achse Hub
1 : 180
:150
:420
4
: 390
mm (G10/G20***S* / D*)
mm (G10/G20***C* / P* / D* Faltenbalg-Option) mm (G10/G20***S* / D*)
mm (G10/G20***C* / P* / D* Faltenbalg-Option)
Armlänge
65 : 650 mm (nur G10-Serie)
85 : 850 mm
A0 : 1,000 mm (nur G20-Serie)
Serie
G10 : G10-Serie
G20 : G20-Serie
Umgebung
Reinraum-Modell
Reinraum-Modell-Manipulatoren haben zusätzliche Vorrichtungen, die den Staub reduzieren, der durch den Manipulator abgegeben wird, um den Gebrauch in Reinraum-Umgebungen zu ermöglichen.
Protected-Modell (IP54 / IP65)
Die Protected-Modell-Manipulatoren werden unter widrigen Bedingungen mit Staub und ölhaltigem Dunst betrieben.
G10/G20-***D*
Standard G10/G20-***D*-Manipulatoren haben keine Faltenbälge. Der Standard G10/G20-***D*-Manipulator (ohne Faltenbalg-Option) wird unter widrigen Bedingungen mit ölhaltigem Dunst betrieben.
Wenn Sie Faltenbälge benötigen, wählen Sie bei der Bestellung einen Manipulator mit Faltenbalg-Option.
Die Manipulatoren mit Faltenbälgen (Option) erfüllen die Anforderungen der Schutzart IP54 (IEC 60529, JIS C0920).
12 |
G10 / G20 Rev.3 |

Einrichten und Betrieb 2. Spezifikationen
G10/G20-***P*
Die G10/G20-***P*-Manipulatoren erfüllen die Anforderungen der Schutzart IP65 (IEC 60529, JIS C0920).
Für nähere Informationen zu den Spezifikationen lesen Sie Einrichten und Betrieb: 2.4 Spezifikationen.
G10 / G20 Rev.3 |
13 |
Einrichten und Betrieb 2. Spezifikationen
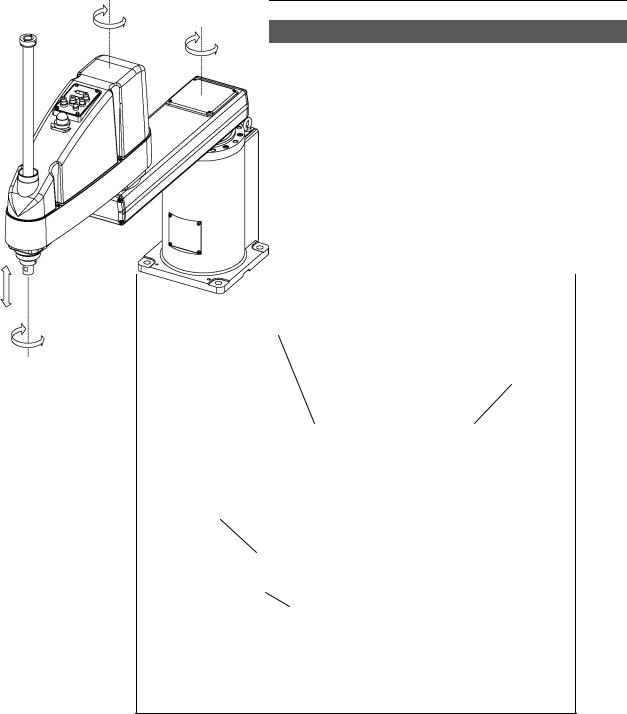
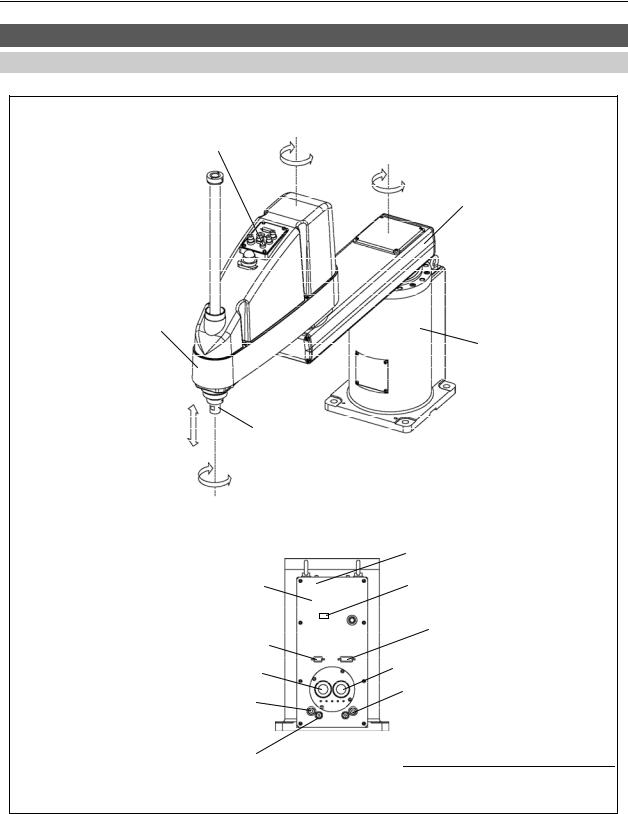
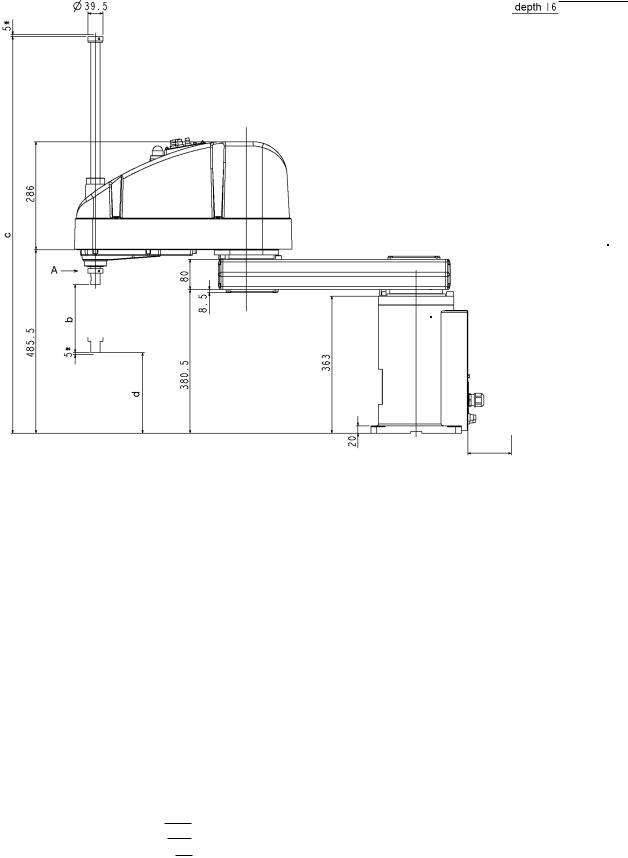
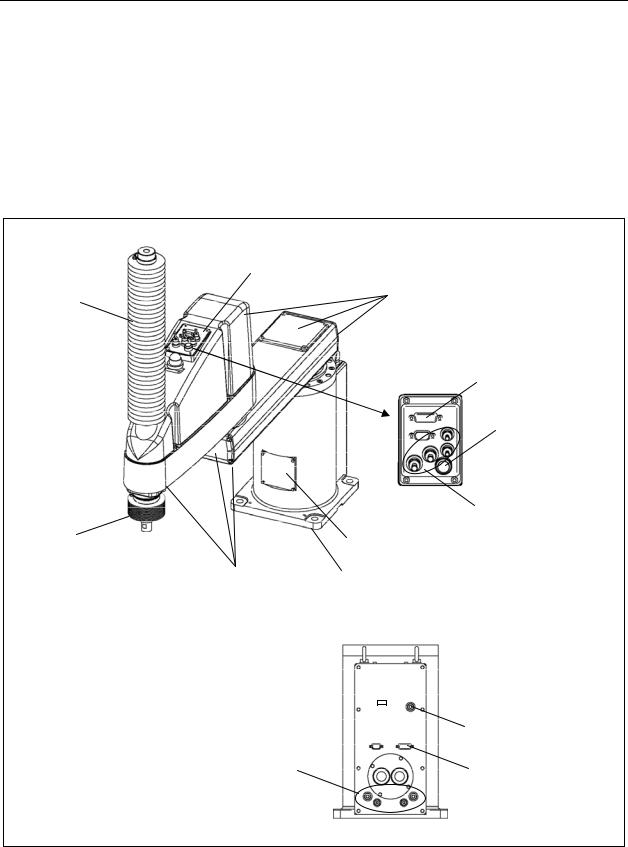
2.3Bauteilenamen und Außenabmessungen
2.3.1Tischplattenmontage
Standard-Modell: G10/G20-***S
|
2. Achse |
|
|
3. und 4. Achse |
(dreht) |
1. Achse |
|
− |
|||
Bremsfreigabetaster |
(dreht) |
||
+ |
|||
|
− |
||
|
|
||
|
|
+ |
1. Arm
2. Arm
|
|
|
|
|
Sockel |
+ |
|
|
|
|
|
3. Achse |
Z-Achse |
|
|
|
|
(auf und ab) |
|
|
|
|
|
|
|
|
|
|
|
−− |
|
|
|
|
|
+ |
|
|
|
|
|
4. Achse |
|
|
|
|
|
(dreht) |
|
|
|
|
|
|
|
|
|
|
MT-Aufkleber |
Signatur-Aufkleber |
|
|
|
|
(nur für Kundenspezifikation) |
(Seriennummer des Manipulators) |
|
|
|
CE-Kennzeichen |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
Anwenderverkabelung |
|
|
|
Anwenderverkabelung |
|
|
|
|
|||
(9-Pin D-Sub-Anschluss) |
|
|
|
(15-Pin D-Sub-Anschluss) |
|
Signalkabel |
|
|
|
Stromkabel |
|
|
|
|
|
||
Pneumatikschnellkupplung (weiß) für |
|
|
|
Pneumatikschnellkupplung (schwarz) |
|
Pneumatikschlauch mit ø 6 mm |
|
|
|
|
für Pneumatikschlauch mit ø 6 mm |
 Pneumatikschnellkupplung (schwarz) Pneumatikschnellkupplung (weiß) für für Pneumatikschlauch mit ø 4 mm Pneumatikschlauch mit ø 4 mm
Pneumatikschnellkupplung (schwarz) Pneumatikschnellkupplung (weiß) für für Pneumatikschlauch mit ø 4 mm Pneumatikschlauch mit ø 4 mm
HINWEIS Der Bremsfreigabetaster ist mit den Bremsen der 3. und der 4. Achse verbunden. Wenn dieser Taster
)im Not-Aus-Modus betätigt wird, werden gleichzeitig die Bremsen beider Achsen gelöst.
14 |
G10 / G20 Rev.3 |
Einrichten und Betrieb 2. Spezifikationen
2-M8 Tiefe 16
2-M4Tiefe 12
|
|
|
|
(Transportösen |
|
|
|
|
|
befestigen) |
|
|
|
|
|
|
|
|
G10-65*S |
G10/G20-85*S |
G20-A0*S |
||
|
|
|
|
|
|
a |
250 |
450 |
|
600 |
|
|
|
|
|
|
|
|
G10/G20-**1S |
G10/G20-**4S |
|
|
|
b |
180 |
420 |
|
|
|
c |
813,5 |
1053,5 |
|
|
|
d |
213,5 |
-26,5 |
|
|
|
(*) Zeigt Hubweite durch mechanischen Stopper an.
90 oder mehr Platz für Kabel
1 mm flacher
Schnitt |
|
konische |
|
Öffnung |
|
ø4,90° |
|
Max.ø18 Durchgangsbohrung |
|
ø25 h7 Durchmesser Z-Achse |
|
ø39,5 Durchmesser mechanischer |
Fuß beide Seiten Fase C0,5 |
Detail von “A”Stopper |
Referenz-Durchgangsbohrung |
(Position der Kalibrierungspunkte der 3. und 4. Achse) |
(Ansicht Sockelboden) |
G10 / G20 Rev.3 |
15 |

Einrichten und Betrieb 2. Spezifikationen
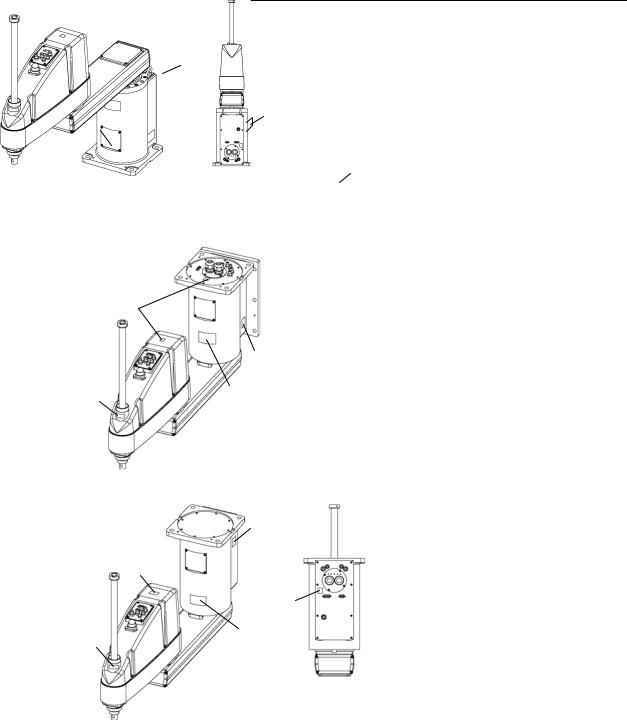
Reinraum-Modell G10/G20-***C
Die folgende Abbildung zeigt die zusätzlichen Teile und Spezifikationen des Reinraum-Modells für die Tischplattenmontage im Vergleich zum Standard-Modell, bezogen auf Äußerlichkeiten.
Oberer
Faltenbalg Blechabdeckung
(gegen statische
Elektrizität)
Unterer
Faltenbalg
Blechabdeckung |
Abdeckung |
|||||
als Oberfläche für die |
||||||
(gegen statische |
||||||
Tischplattenmontage |
||||||
Elektrizität) |
||||||
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Abluft-Ausgang
16 |
G10 / G20 Rev.3 |

Einrichten und Betrieb 2. Spezifikationen
2-M4 Tiefe 11
|
|
|
|
|
|
|
|
2-M4 Tiefe 11 |
|
||
|
|
|
|
|
|
|
|
(Transportösen befestigen) |
|||
|
|
|
|
|
|
|
|
|
|||
|
|
G10-65*C |
|
G10/G20-85*C |
|
G20-A0*C |
|
|
|
||
|
a |
250 |
|
450 |
|
600 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
G10/G20-**1C |
|
G10/G20-**4C |
|
|
|
|
|
||
|
b |
150 |
|
|
390 |
|
|
|
|
|
|
|
c |
870,5 |
|
|
1129,5 |
|
|
|
|
|
|
|
d |
205,5 |
|
|
-34,5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(*) Zeigt Hubweite durch mechanischen Stopper an.
1 mm flacher Schnitt
Konische Öffnung ø4,90°
Max. ø18 Durchgangsbohrung
ø25 h7 Durchmesser Z-Achse ø39,5 Durchmesser mechanischer Stopper
90 oder mehr Platz für Kabel
Fuß beide Seite Fase C0,5
Detail von „A“ |
Referenz-Durchgangsbohrung |
(Position der Kalibrierungspunkte der 3. und 4. Achse |
(Ansicht Sockelboden) |
G10 / G20 Rev.3 |
17 |
Einrichten und Betrieb 2. Spezifikationen
Protected-Modell G10/G20-***D / P
Die folgende Abbildung zeigt die zusätzlichen Teile und Spezifikationen des Protected-Modells für die Tischplattenmontage im Vergleich zum Standard-Modell, bezogen auf Äußerlichkeiten.
Standard G10/G20-***D*-Manipulatoren haben keine Faltenbälge. Sie bei der Bestellung einen Manipulator mit Faltenbalg-Option. Manipulator mit Faltenbalg-Option.
Wenn Sie Faltenbälge benötigen, wählen Die folgende Abbildung zeigt einen
Die Kantenabmessungen der Arme eines Standard G10/G20-***D*-Manipulators (ohne Faltenbalg-Option) siehe G10/G20-***S.
|
Edelstahlplatte |
Oberer |
nur G10/G20-***P |
Faltenbalg |
Blechabdeckung (ölbeständig) |
|
|
|
|
|
|
Anwenderverkabelung |
|
|
|
|
|
|
(Protected-model) |
|
|
|
|
|
|
3. und 4. Achse |
|
|
|
|
|
|
Bremsfreigabetaster |
|
|
|
|
|
|
(Protected-model) |
|
|
|
|
|
|
Pneumatikschnell- |
|
|
|
|
|
|
kupplungen mit |
Unterer |
Edelstahlplatte |
Abdeckung |
||||
(Protected-model) |
||||||
Faltenbalg |
|
|
|
|
|
|
nur G10/G20-***P |
Edelstahlplatte als Oberfläche |
|||||
Blechabdeckung (ölbeständig) |
zur Tischplattenmontage |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Abluft-Ausgang |
Pneumatikschnell- |
Anwenderverkabelung |
kupplungen mit |
|
Abdeckung |
(Protected-model) |
(Protected-model) |
|
HINWEIS Bei dem Protected-Modell sind alle äußeren Schrauben aus Edelstahl.
)
18 |
G10 / G20 Rev.3 |
 Loading...
Loading...