


AATA INTERNATIONAL B.V.
Manual Stair Robot SR1750 HE
Manual Stair Robot SR1750 HE
AATA INTERNATIONAL B.V. |
Manual Stair Robot SR1750 HE |
||
Publication: 29-07-04 |
|||
|
|
||
|
|
|
|
Stairrobot |
|
|
|
Type number |
: SR 1750 HE |
|
|
Serial number |
: |
|
|
Year of construction |
: 2001 |
|
|
Owner |
: |
|
|
Manufacturer :
AATA International b.v Willem 2 straat 1e 6021 EA Budel
The Netherlands
Tel |
: 0031-(0) 495 518214 |
Fax |
: 0031-(0) 495 518515 |
e-mail: aata@aata.nl http:www.aata.nl
No part of this publication may be reproduced, stored in a retrieval system or transmitted in any form or by any means, electronic, mechanical, photocopying, recording or otherwise without the written permission of AATA International b.v.
The content of this manual is subject to change without notice. Product specification and design are subject to change without notice.
Page 2 of 28
AATA INTERNATIONAL B.V. |
Manual Stair Robot SR1750 HE |
|
Publication: 29-07-04 |
||
|
Preface
AATA International is an innovative and dynamical company, specialised in stair climbing equipment. Stairrobots are active in over 30 countries worldwide.
This manual is written for machine operators and for technician who take care for the maintenance of the machine. Although the tiniest details are not set out, the manual is a useful help for people who are dealing with the machine on a daily basis.
The stairrobot SR 1750 HE has been used for over 20 years by many well known companies and transport contractors worldwide who are involved in the movement of heavy loads into and out of customers premises.
The stairrobot SR 1750 HE is designed to carry unit loads weighing up to 1000 kg upand down stairs. The accessory equipment, stair approach ramp, manoeuvring dolly and the turntable, have been designed to assist the movement up to and onto the stairs and the take off from the top and journey to the final destination.
This manual should be used in conjunction with the cd-rom instruction video, which is placed on the inside of the manuals cover.
Read this manual and view the instruction cd-rom carefully before putting the SR 1750HE into operation. Always take note of the safety rules as mentioned in chapter “safety”.
A copy of this manual should be kept with the machine, so the operator has it at his disposal.
AATA International b.v.
Page 3 of 28

AATA INTERNATIONAL B.V. |
Manual Stair Robot SR1750 HE |
|
Publication: 29-07-04 |
||
|
Table of contents
Preface…………………………………………………………………………………………… |
3 |
Table of contents .……………………………………………………………………………… |
4 |
Survey of standards……………………………………...……………………………………… |
5 |
Survey of standards………………………………………………………………………...…… |
5 |
1. Technical data…..………………..………………………………………………………… |
6 |
2.Description main components stair robot SR 1750 HE
2.1Drive………………………………………………………………………………… 7
2.2Transmission and brake………………………………………………………….. 7
2.3Tracks………………………………………………………………………………. 7
2.4Controls…………………………………………………………………………….. 8
2.5Hydraulic levelling platform………………………………………………………. 8
2.6Descent adjuster ………………………………………………………………….. 9
2.7Hydraulic motor and Pump
3.Ancillary equipment
3.1Loading ramp……………………………………………………………………………10
3.2Turntable…………………………………………………………………………………11
3.3Winch …………………………………………………………………………………..11
3.4Dolly .…………………………………………………………………………………….11
4.Safety
4.1General safety precaution……………………………………………………………...12
5.Operators procedure
5.1Pre-use inspection…………………………………………………………………….. 14
5.2Loading…………………………………………………………………………………. 15
5.2.1The correct position of the load…………………………………………….15
5.2.2Loading procedure ……………………………………………………… …16
5.3Ascending………………………………………………………………………………..17
5.4Descending ……………………………………………………………………………18
5.5Unloading ………………………………………………………………………………19
6.Trouble shooting chart………………………………………………………………………20
7.Track replacement …………………………………………………………………………22
8.Electrical system chart………………………………………………………………………24
9.Hydraulic system chart …………………………………………………………………… 25
10.Parts………………………………………………………………………………………… 26 10.1 Parts list……………………………………………………………………………… 27
11.CD-rom video……………………………………………………………………………… 28
Page 4 of 28
AATA INTERNATIONAL B.V. |
Manual Stair Robot SR1750 HE |
|
Publication: 29-07-04 |
||
|
Survey of standard
We declare that the construction of the stairrobot SR1750HE is according to the provisions of EC-Directives 89/392/EWG.
Applied harmonized standard:
NEN-EN 60034-5; NEN 10034-6; NEN 10072-2
Applied national standards, directives and technical specifications:
IEC 34-5; IEC 34-7; IEC 72-1
Survey of symbols
Not (or not completely) observing the operating instructions can lead to serious accidents or damage
Danger as a result of electric tension
Page 5 of 28

AATA INTERNATIONAL B.V. |
Manual Stair Robot SR1750 HE |
|
|
Publication: 29-07-04 |
|
|
|
|
|
|
|
1. Technical data SR 1750 HE |
|
|
|
|
|
Description |
Value |
Units |
|
|
|
Speed |
3 |
Metres p/minute |
Lifting capacity |
max. 1000 |
Kg. |
Maximum angle |
Max. 45 |
º Degrees |
Weight |
175 |
Kg. |
Weight including standard accessories |
232 |
Kg. |
Colour |
~~ |
~~ |
Length |
1185 |
Mm |
Width |
720 |
Mm |
Height |
320 |
Mm |
Length loading ramp |
1180 |
Mm |
Width loading ramp |
720 |
Mm |
Drive-motor: single phase low noise AC |
|
|
Thermal cut-out |
|
|
Drive-motor capacity |
0,75 |
KW |
|
1 |
Hp |
Drive-motor power |
220 or 110 |
V |
Hydraulic-motor: single phase low noise AC |
|
|
with thermal cut out |
|
|
Hydraulic-motor capacity |
0,375 |
KW |
|
0,5 |
Hp |
Hydraulic-motor power |
220 or 110 |
V |
Hydraulic-pump: built directly on the hydraulic |
|
|
Motor |
|
|
Hydraulic-pump capacity |
0,8 |
ltr/per minute |
Action pressure max. |
100 |
Bar |
Capacity oil tank |
0,5 |
Ltr |
Control: remote control manually operated |
|
|
4-button switch |
24 |
V |
Mains |
220/110 |
V |
|
50 |
Hz |
Extension cord (cupper wire) |
3x2,5 |
Mm2 |
Extension cord length |
25 |
Mtr |
|
|
|
Page 6 of 28
AATA INTERNATIONAL B.V. |
Manual Stair Robot SR1750 HE |
|
Publication: 29-07-04 |
||
|
2 Description main components stairrobot SR 1750 HE
2.1.Drive
•Single phase low-noise AC motor with thermal cut-out
2.2.Transmission and brake
•Worm-gearbox built directly onto the driving motor
•The worm-wheel reduction forms an affective brake for the (loaded) StairRobot on the staircase
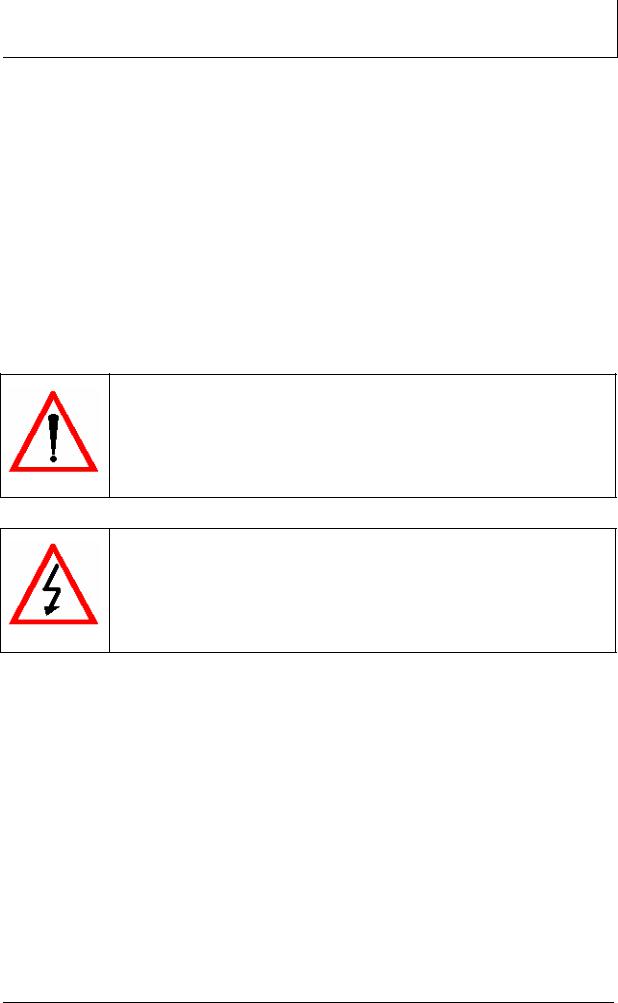
2.3. Tracks
•Internally and externally toothed caterpillar tracks, specially designed for smooth stair climbing
Page 7 of 28

AATA INTERNATIONAL B.V. |
Manual Stair Robot SR1750 HE |
|
Publication: 29-07-04 |
||
|
2. 4. Controls
•Remote control (2 metres cable attached) manually operated 4-button switch
Press a button to drive
2.5. Hydraulic-levelling platform
•To increase stability the platform can be adjusted to the angle of the staircase by a hydraulic cylinder
Page 8 of 28
AATA INTERNATIONAL B.V. |
Manual Stair Robot SR1750 HE |
|
Publication: 29-07-04 |
||
|
||
|
|
2. 6. Descent adjuster
•The descent adjuster is located at the rear end of the machine and is used to adjust the descent of the lifting platform depending on the weight of the load.
•Turn maximum clockwise for speed : 0
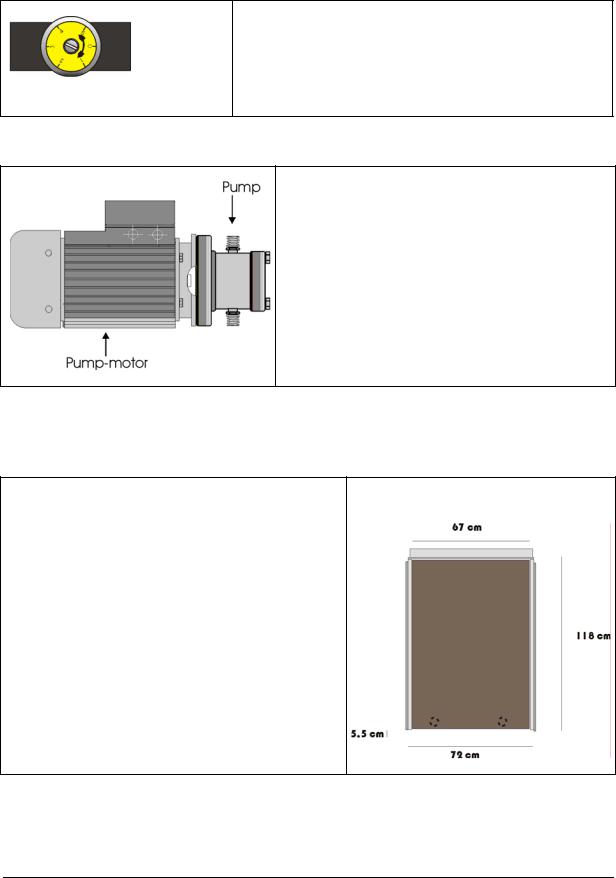
2.7. Hydraulic motor and pump
• The hydraulic-motor is placed on the drive motor with the pump built directly onto the motor
3. Ancillary equipment
3.1.Loading ramp
•The loading ramp is designed to fit neatly into the stairrobots lifting platform. It provides a safe ridged platform to transport the load from the floor-surface to the loadposition on the robot.
Page 9 of 28
 Loading...
Loading...