


 Loading...
Loading...

Preface
Thank you very much for purchasing DELTA’s AC servo products.
This manual will be helpful in the installation, wiring, inspection, and operation of Delta AC servo drive and motor. Before using the product, please read this user manual to ensure correct use.
You should thoroughly understand all safety precautions (DANGERS, WARNINGS and STOPS) before proceeding with the installation, wiring and operation. If you do not understand please contact your local Delta sales representative. Place this user manual in a safe location for future reference.
Using This Manual
Contents of this manual
This manual is a user guide that provides the information on how to install, operate and maintain ASDA-B series AC servo drives and ECMA series AC servo motors. The contents of this manual are including the following topics:
z Installation of AC servo drives and motors z Configuration and wiring
z Trial run steps
z Control functions and adjusting methods of AC servo drives z Parameter settings
z Communication protocol
z Inspection and maintenance z Troubleshooting
z Application examples
Who should use this manual
This user manual is intended for the following users: z Those who are responsible for designing.
z Those who are responsible for installing or wiring.
z Those who are responsible for operating or programming.
z Those who are responsible for maintaining or troubleshooting.
Important precautions
Before using the product, please read this user manual thoroughly to ensure correct use and store this manual in a safe and handy place for quick reference whenever necessary. Besides, please observe the following precautions:
z Do not use the product in a potentially explosive environment.
z Install the product in a clean and dry location free from corrosive and inflammable gases or liquids.
Revision January, 2009 |
i |
Preface|ASDA-B Series
zDo not connect a commercial power supply to the U, V, W terminals of motor. Failure to observe this precaution will damage either the Servo motor or drive.
zEnsure that the motor and drive are correctly connected to a ground. The grounding method must comply with the electrical standard of the country (Please refer to NFPA 70: National Electrical Code, 2005 Ed.).
zDo not disconnect the AC servo drive and motor while the power is ON.
zDo not attach, modify and remove wiring when power is applied to the AC servo drive and motor.
zBefore starting the operation with a mechanical system connected, make sure the emergency stop equipment can be energized and work at any time.
zDo not touch the drive heat sink or the servo motor during operation. Otherwise, it may result in serious personnel injury.
PLEASE READ PRIOR TO INSTALLATION FOR SAFETY.
ASDA-B series drives are open type servo drives and must be installed in an NEMA enclosure such as a protection control panel during operation to comply with the requirements of the international safety standards. They are provided with precise feedback control and high-speed calculation function incorporating DSP (Digital Signal Processor) technology, and intended to drive three-phase permanent magnet synchronous motors (PMSM) to achieve precise positioning by means of accurate current output generated by IGBT (Insulated Gate Bipolar Transistor).
ASDA-B series drives can be used in industrial applications and for installation in an end-use enclosure that do not exceed the specifications defined in the ASDA-B series user manual (Drives, cables and motors are for use in a suitable enclosure with a minimum of a UL50 type 1 or NEMA 250 Type 1 rating).
Carefully notice and observe the following safety precautions when receiving, inspecting, installing, operating, maintaining and troubleshooting. The following words, DANGER, WARNING and STOP are used to mark safety precautions when using the Delta’s servo product. Failure to observe these precautions may void the warranty!
The words, DANGER, WARNING and STOP, have the following meaning:
Indicates a potentially hazardous situation and if not avoided, may result in serious injury or death.
Indicates a potentially hazardous situation and if not avoided, may result in minor to moderate injury or serious damage to the product.
Indicates an improper action that it is not recommended to do and if doing it may cause damage, malfunction and inability.
ii |
Revision January, 2009 |

Preface|ASDA-B Series
Unpacking Check
¾Please ensure that both the servo drive and motor are correctly matched for size (power rating). Failure to observe this precaution may cause fire, seriously damage the drive / motor or cause personal injury.
Installation
¾Do not install the product in a location that is outside the stated specification for the drive and motor. Failure to observe this caution may result in electric shock, fire, or personal injury.
Wiring
¾ Connect the ground terminals to a class-3 ground (Ground resistance should not exceed 100Ω). Improper grounding may result in electric shock or fire.
¾Do not connect any power supplies to the U, V, W terminals. Failure to observe this precaution may result in serious injury, damage to the drive or fire.
¾Ensure that all screws, connectors and wire terminations are secure on the power supply, servo drive and motor. Failure to observe this caution may result in damage, fire or personal injury.
Operation
¾ Before starting the operation with a mechanical system connected, change the drive parameters to match the userdefined parameters of the mechanical system. Starting the operation without matching the correct parameters may result in servo drive or motor damage, or damage to the mechanical system.
¾Ensure that the emergency stop equipment or device is connected and working correctly before operating the motor that is connected to a mechanical system.
¾Do not approach or touch any rotating parts (e.g. shaft) while the motor is running. Failure to observe this
precaution may cause serious personal injury.
¾ In order to prevent accidents, the initial trial run for servo motor should be conducted under no load conditions (separate the motor from its couplings and belts).
¾For the initial trial run, do not operate the servo motor while it is connected to its mechanical system. Connecting the motor to its mechanical system may cause damage or result in personal injury during the trail run. Connect the servo motor once it has successfully completed a trail run.
¾Caution: Please perform trial run without load first and then perform trial run with load connected. After the servo motor is running normally and regularly without load, then run servo motor with load connected. Ensure to perform trial run in this order to prevent unnecessary danger.
¾Do not touch either the drive heat sink or the motor during operation as they may become hot and personal injury may result.
Maintenance and Inspection
¾Do not touch any internal or exposed parts of servo drive and servo motor as electrical shock may result.
¾Do not remove the operation panel while the drive is connected to an electrical power source otherwise electrical shock may result.
¾Wait at least 10 minutes after power has been removed before touching any drive or motor terminals or performing any wiring and/or inspection as an electrical charge may still remain in the servo drive and servo motor with hazardous voltages even after power has been removed.
¾Do not disassemble the servo drive or motor as electric shock may result.
¾Do not connect or disconnect wires or connectors while power is applied to the drive and motor.
¾Only qualified personnel who have electrical knowledge should conduct maintenance and inspection.
Main Circuit Wiring
¾ Install the encoder cables in a separate conduit from the motor power cables to avoid signal noise. Separate the conduits by 30cm (11.8inches) above.
¾ Use multi-stranded twisted-pair wires or multi-core shielded-pair wires for signal, encoder (PG) feedback cables. The maximum length of command input cable is 3m (9.84ft.) and the maximum length of encoder (PG) feedback cables is 20m (65.62ft.).
¾As a charge may still remain in the drive with hazardous voltages even after power has been removed, be sure to wait at least 10 minutes after power has been removed before performing any wiring and/or inspection.
Revision January, 2009 |
iii |
Preface|ASDA-B Series
¾ It is not recommended to frequently power the drive on and off. Do not turn the drive off and on more than once per minute as high charging currents within the internal capacitors may cause damage.
Main Circuit Terminal Wiring
¾ Insert only one wire into one terminal on the terminal block.
¾ When inserting wires, please ensure that the conductors are not shorted to adjacent terminals or wires. ¾ Please use Y-type terminals to tighten the ends of wires.
¾ Ensure to double check the wiring before applying power to the drive.
|
|
|
NOTE |
1) In this manual, actual measured values are in metric units. Dimensions in (imperial |
|
|
|
||
|
|
|||
|
|
|
|
units) are for reference only. Please use metric for precise measurements. |
|
|
|
|
2)The content of this manual may be revised without prior notice. Please consult our distributors or download the most updated version at http://www.delta.com.tw/industrialautomation.
iv |
Revision January, 2009 |

Table of Contents
Chapter 1 Unpacking Check and Model Explanation............................................................. |
1-1 |
||
1.1 |
Unpacking Check ........................................................................................................................ |
1-1 |
|
1.2 |
Model Explanation....................................................................................................................... |
1-3 |
|
|
1.2.1 |
Nameplate Information ..................................................................................................... |
1-3 |
|
1.2.2 |
Model Name Explanation ................................................................................................. |
1-4 |
1.3 |
Servo Drive and Servo Motor Combinations............................................................................... |
1-6 |
|
1.4 |
Servo Drive Features................................................................................................................... |
1-7 |
|
1.5 |
Control Modes of Servo Drive ..................................................................................................... |
1-8 |
|
Chapter 2 Installation and Storage......................................................................................... |
2-1 |
||
2.1 |
Installation Notes ......................................................................................................................... |
2-1 |
|
2.2 |
Storage Conditions...................................................................................................................... |
2-1 |
|
2.3 |
Installation Conditions ................................................................................................................. |
2-2 |
|
2.4 |
Installation Procedure and Minimum Clearances........................................................................ |
2-3 |
|
Chapter 3 Connections and Wiring ........................................................................................ |
3-1 |
||
3.1 |
Connections................................................................................................................................. |
3-1 |
|
|
3.1.1 Connecting to Peripheral Devices .................................................................................... |
3-1 |
|
|
3.1.2 Servo Drive Connectors and Terminals ........................................................................... |
3-2 |
|
|
3.1.3 |
Wiring Methods................................................................................................................. |
3-4 |
|
3.1.4 Motor Power Cable Connector Specifications.................................................................. |
3-5 |
|
|
3.1.5 |
Encoder Connector Specifications ................................................................................... |
3-7 |
|
3.1.6 Cable Specifications for Servo Drive and Servo Motor .................................................... |
3-8 |
|
Revision January, 2009
Table of Contents|ASDA-B Series |
|
||
3.2 |
Basic Wiring................................................................................................................................. |
3-9 |
|
3.3 |
Input / Output Interface Connector -CN1..................................................................................... |
3-12 |
|
|
3.3.1 |
CN1 Terminal Identification .............................................................................................. |
3-12 |
|
3.3.2 Signals Explanation of Connector CN1 ............................................................................ |
3-13 |
|
|
3.3.3 User-defined DI and DO signals....................................................................................... |
3-18 |
|
|
3.3.4 Wiring Diagrams of I/O Signals (CN1).............................................................................. |
3-20 |
|
3.4 |
Encoder Connector CN2 ............................................................................................................. |
3-24 |
|
3.5 |
Serial Communication Connector CN3 ....................................................................................... |
3-25 |
|
|
3.5.1 CN3 Terminal Layout and Identification ........................................................................... |
3-25 |
|
|
3.5.2 Connection between PC/Keypad and Connector CN3 .................................................... |
3-26 |
|
3.6 |
Standard Connection Example.................................................................................................... |
3-27 |
|
|
3.6.1 |
Position Control Mode ...................................................................................................... |
3-27 |
|
3.6.2 |
Speed Control Mode......................................................................................................... |
3-28 |
|
3.6.3 |
Torque Control Mode........................................................................................................ |
3-29 |
Chapter 4 Display and Operation........................................................................................... |
4-1 |
||
4.1 |
ASD-PU-01A ............................................................................................................................... |
4-1 |
|
|
4.1.1 Description of Digital Keypad ASD-PU-01A ..................................................................... |
4-1 |
|
|
4.1.2 |
Display Flowchart ............................................................................................................. |
4-3 |
|
4.1.3 |
Status Display................................................................................................................... |
4-8 |
|
4.1.4 Fault Code Display Operation .......................................................................................... |
4-11 |
|
|
4.1.5 |
JOG Operation.................................................................................................................. |
4-12 |
|
4.1.6 DO Force Output Diagnosis Operation ............................................................................ |
4-14 |
|
|
4.1.7 |
DI Diagnosis Operation .................................................................................................... |
4-15 |
|
4.1.8 |
DO Diagnosis Operation................................................................................................... |
4-15 |
|
4.1.9 Parameters Read and Write ............................................................................................. |
4-16 |
|
Revision January, 2009
|
|
|
Table of Contents|ASDA-B Series |
4.2 |
ASD-PU-01B ............................................................................................................................... |
4-18 |
|
|
4.2.1 Description of Digital Keypad ASD-PU-01B ..................................................................... |
4-18 |
|
|
4.2.2 |
Display Flowchart ............................................................................................................. |
4-19 |
|
4.2.3 |
Status Display................................................................................................................... |
4-28 |
|
4.2.4 Fault Code Display Operation .......................................................................................... |
4-31 |
|
|
4.2.5 |
JOG Operation.................................................................................................................. |
4-31 |
|
4.2.6 DO Force Output Diagnosis Operation ............................................................................ |
4-33 |
|
|
4.2.7 |
DI Diagnosis Operation .................................................................................................... |
4-34 |
|
4.2.8 |
DO Diagnosis Operation................................................................................................... |
4-35 |
|
4.2.9 Parameters Read and Write ............................................................................................. |
4-36 |
|
Chapter 5 Trial Run and Tuning Procedure ........................................................................... |
5-1 |
||
5.1 |
Inspection without Load............................................................................................................... |
5-1 |
|
5.2 |
Applying Power to the Drive ........................................................................................................ |
5-3 |
|
5.3 |
JOG Trial Run without Load ........................................................................................................ |
5-7 |
|
|
5.3.1 |
ASD-PU-01A Tuning Flowchart........................................................................................ |
5-7 |
|
5.3.2 |
ASD-PU-01B Tuning Flowchart........................................................................................ |
5-8 |
5.4 |
Speed Trial Run without Load ..................................................................................................... |
5-9 |
|
5.5 |
Tuning Procedure........................................................................................................................ |
5-11 |
|
|
5.5.1 |
Tuning Flowchart .............................................................................................................. |
5-13 |
|
5.5.2 Load Inertia Estimation Flowchart .................................................................................... |
5-14 |
|
|
5.5.3 AutoMode (PI) Tuning Flowchart...................................................................................... |
5-15 |
|
|
5.5.4 AutoMode (PDFF) Tuning Flowchart................................................................................ |
5-17 |
|
|
5.5.5 Limit of Load Inertia Estimation ........................................................................................ |
5-18 |
|
|
5.5.6 Relationship between Tuning Modes and Parameters .................................................... |
5-19 |
|
|
5.5.7 Gain Adjustment in Manual Mode .................................................................................... |
5-20 |
|
Revision January, 2009
Table of Contents|ASDA-B Series
Chapter 6 Control Modes of Operation .................................................................................. |
6-1 |
||
6.1 Control Modes of Operation ........................................................................................................ |
6-1 |
||
6.2 |
Position Control Mode ................................................................................................................. |
6-2 |
|
|
6.2.1 Command Source of Position Control Mode .................................................................... |
6-2 |
|
|
6.2.2 Structure of Position Control Mode .................................................................................. |
6-3 |
|
|
6.2.3 Pulse Inhibit Input Function (INHIBIT).............................................................................. |
6-4 |
|
|
6.2.4 |
Electronic Gear Ratio ....................................................................................................... |
6-4 |
|
6.2.5 |
Low-pass Filter ................................................................................................................. |
6-6 |
|
6.2.6 Position Loop Gain Adjustment ........................................................................................ |
6-6 |
|
6.3 |
Speed Control Mode.................................................................................................................... |
6-9 |
|
|
6.3.1 Command Source of Speed Control Mode ...................................................................... |
6-9 |
|
|
6.3.2 Structure of Speed Control Mode..................................................................................... |
6-10 |
|
|
6.3.3 Smoothing Strategy of Speed Control Mode.................................................................... |
6-11 |
|
|
6.3.4 Analog Speed Input Scaling ............................................................................................. |
6-14 |
|
|
6.3.5 Timing Chart of Speed Control Mode............................................................................... |
6-15 |
|
|
6.3.6 Speed Loop Gain Adjustment........................................................................................... |
6-15 |
|
|
6.3.7 |
Resonance Suppression .................................................................................................. |
6-23 |
6.4 |
Torque Control Mode................................................................................................................... |
6-25 |
|
|
6.4.1 Command Source of Torque Control Mode ..................................................................... |
6-25 |
|
|
6.4.2 Structure of Torque Control Mode.................................................................................... |
6-26 |
|
|
6.4.3 Smoothing Strategy of Torque Control Mode................................................................... |
6-27 |
|
|
6.4.4 Analog Torque Input Scaling ............................................................................................ |
6-27 |
|
|
6.4.5 Timing Chart of Speed Control Mode............................................................................... |
6-28 |
|
6.5 |
Control Modes Selection ............................................................................................................. |
6-29 |
|
|
6.5.1 Speed / Position Control Mode Selection......................................................................... |
6-29 |
|
Revision January, 2009
|
|
Table of Contents|ASDA-B Series |
6.5.2 Speed / Torque Control Mode Selection .......................................................................... |
6-30 |
|
6.5.3 Torque / Position Control Mode Selection........................................................................ |
6-30 |
|
6.6 Others |
.......................................................................................................................................... |
6-31 |
6.6.1 |
Speed Limit....................................................................................................................... |
6-31 |
6.6.2 |
Torque Limit...................................................................................................................... |
6-31 |
6.6.3 |
Regenerative Resistor ...................................................................................................... |
6-32 |
6.6.4 |
Electromagnetic Brake ..................................................................................................... |
6-36 |
Chapter 7 |
Servo Parameters ................................................................................................. |
7-1 |
|
7.1 |
Definition...................................................................................................................................... |
7-1 |
|
7.2 |
Parameter Summary ................................................................................................................... |
7-2 |
|
7.2.1 Parameters List by Group................................................................................................. |
7-2 |
||
7.2.2 Parameters List by Function............................................................................................. |
7-10 |
||
7.3 |
Detailed Parameter Listings ........................................................................................................ |
7-19 |
|
Chapter 8 |
MODBUS Communications................................................................................... |
8-1 |
|
8.1 |
Communication Hardware Interface............................................................................................ |
8-1 |
|
8.2 |
Communication Parameter Settings............................................................................................ |
8-4 |
|
8.3 |
MODBUS Communication Protocol ............................................................................................ |
8-8 |
|
Chapter 9 Maintenance and Inspection ................................................................................. |
9-1 |
||
9.1 |
Basic Inspection .......................................................................................................................... |
9-1 |
|
9.2 |
Maintenance ................................................................................................................................ |
9-2 |
|
9.3 |
Life of Replacement Components ............................................................................................... |
9-2 |
|
Chapter 10 |
Troubleshooting..................................................................................................... |
10-1 |
|
10.1 |
Fault Messages Table ................................................................................................................. |
10-1 |
|
10.2 |
Potential Cause and Corrective Actions...................................................................................... |
10-3 |
|
10.3 |
Clearing Faults ............................................................................................................................ |
10-12 |
|
Revision January, 2009
Table of Contents|ASDA-B Series
Chapter 11 Specifications ........................................................................................................ |
11-1 |
|
11.1 |
Specifications of Servo Drive (ASDA-B Series) .......................................................................... |
11-1 |
11.2 |
Specifications of Servo Motor (ECMA Series) ............................................................................ |
11-4 |
11.3 |
Dimensions of Servo Drive.......................................................................................................... |
11-7 |
11.4 |
Servo Motor Speed-Torque Curves (T-N Curve) ........................................................................ |
11-10 |
11.5 |
Overload Characteristics ............................................................................................................. |
11-11 |
11.6 |
Dimensions of Servo Motor ......................................................................................................... |
11-18 |
11.7 |
EMI Filters Selection.................................................................................................................... |
11-22 |
Chapter 12 Application Examples ............................................................................................ |
12-1 |
|
12.1 |
Connecting to DVP-EH PLC and DOP-A HMI ............................................................................ |
12-1 |
12.2 |
Connecting to DVP-EH PLC and Delta TP04 Series .................................................................. |
12-12 |
12.3 |
External Controller Connection Examples................................................................................... |
12-15 |
Appendix A Accessories ........................................................................................................... |
A-1 |
|
Revision January, 2009
Table of Contents|ASDA-B Series
About this Manual…
User Information
Be sure to store this manual in a safe place.
Due to constantly growing product range, technical improvement and alteration or changed texts, figures and diagrams, we reserve the right of this manual contained information change without prior notice.
Coping or reproducing any part of this manual, without written consent of Delta Electronics Inc. is prohibited.
Technical Support and Service
Welcome to contact us or visit our web site (http://www.delta.com.tw/industrialautomation/) if you need any technical support, service and information, or, if you have any question in using the product. We are looking forward to serve you needs and willing to offer our best support and service to you. Reach us by the following ways.
ASIA
DELTA ELECTRONICS, INC.
Taoyuan Plant 1
31-1, XINGBANG ROAD, GUISHAN INDUSTRIAL ZONE,
TAOYUAN COUNTY 33370, TAIWAN, R.O.C. TEL: 886-3-362-6301
FAX: 886-3-362-7267
NORTH/SOUTH AMERICA
DELTA PRODUCTS CORPORATION (USA)
Raleigh Office
P.O. BOX 12173 5101 DAVIS DRIVE,
RESEARCH TRIANGLE PARK, NC 27709, U.S.A. TEL: 1-919-767-3813
FAX: 1-919-767-3969
JAPAN
DELTA ELECTRONICS (JAPAN), INC.
Tokyo Office
DELTA SHIBADAIMON BUILDING 2-1-14 SHIBADAIMON, MINATO-KU, TOKYO, 105-0012, JAPAN
TEL: 81-3-5733-1111
FAX: 81-3-5733-1211
EUROPE
DELTRONICS (THE NETHERLANDS) B.V.
Eindhoven Office
DE WITBOGT 15, 5652 AG EINDHOVEN, THE NETHERLANDS
TEL: 31-40-259-2850
FAX: 31-40-259-2851
Revision January, 2009
Table of Contents|ASDA-B Series
This page intentionally left blank
Revision January, 2009

Chapter 1 Unpacking Check and Model Explanation
1.1Unpacking Check
After receiving the AC servo drive, please check for the following:
Ensure that the product is what you have ordered.
Verify the part number indicated on the nameplate corresponds with the part number of your order (Please refer to Section 1.2 for details about the model explanation).
Ensure that the servo motor shaft rotates freely.
Rotate the motor shaft by hand; a smooth rotation will indicate a good motor. However, a servo motor with an electromagnetic brake can not be rotated manually.
Check for damage.
Inspect the unit to insure it was not damaged during shipment.
Check for loose screws.
Ensure that all necessary screws are tight and secure.
If any items are damaged or incorrect, please inform the distributor whom you purchased the product from or your local Delta sales representative.
A complete and workable AC servo system should be including the following parts: Part I : Delta standard supplied parts
(1)Servo drive
(2)Servo motor
(3)Quick Start
Part II : Optional parts, not Delta standard supplied part (Refer to Appendix A)
(1)One power cable, which is used to connect servo motor and U, V, W terminals of servo drive. This power cable is with one green grounding cable. Please connect the green grounding cable to the ground terminal of the servo drive.
(2)One encoder cable, which is used to connect the encoder of servo motor and CN2 terminal of servo drive.
(3)CN1 Connector: 25 PIN Connector (D-sub Connector)
(4)CN2 Connector: 9 PIN Connector (D-sub Connector)
(5)CN3 Connector: 8 PIN Connector (DIN Cable Mount Male)
Revision January 2009 |
1-1 |
Chapter 1 Unpacking Check and Model Explanation|ASDA-B Series
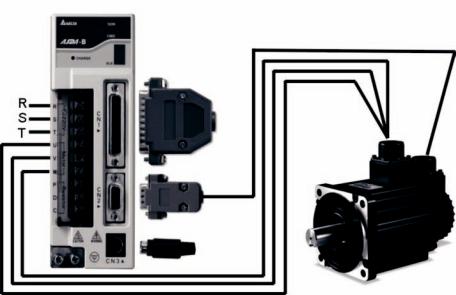
Delta AC Servo Drive and Motor
1-2 |
Revision January 2009 |
Chapter 1 Unpacking Check and Model Explanation|ASDA-B Series
1.2Model Explanation
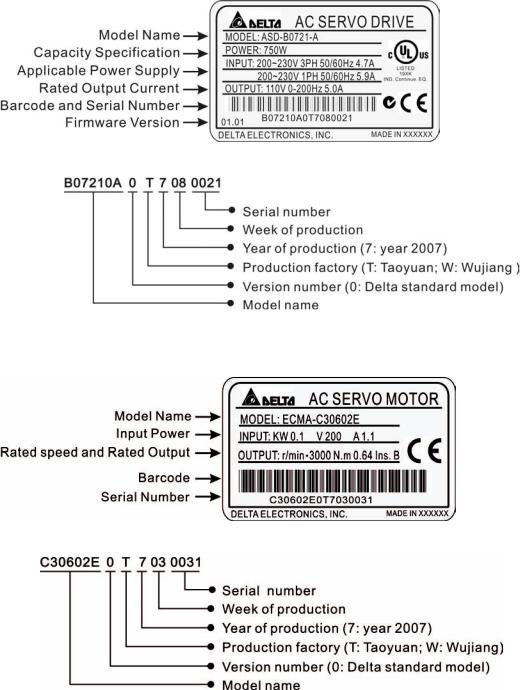
1.2.1 Nameplate Information
ASDA-B Series Servo Drive
Nameplate Explanation
Serial Number Explanation
ECMA Series Servo Motor
Nameplate Explanation
Serial Number Explanation
Revision January 2009 |
1-3 |
Chapter 1 Unpacking Check and Model Explanation|ASDA-B Series
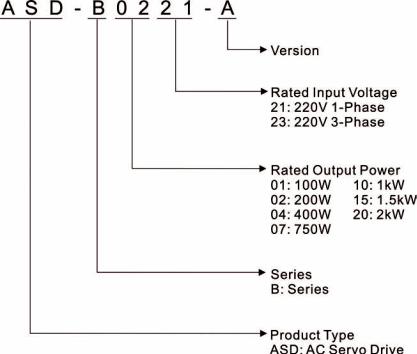
1.2.2 Model Name Explanation
ASDA-B Series Servo Drive
1-4
Revision January 2009
Chapter 1 Unpacking Check and Model Explanation|ASDA-B Series
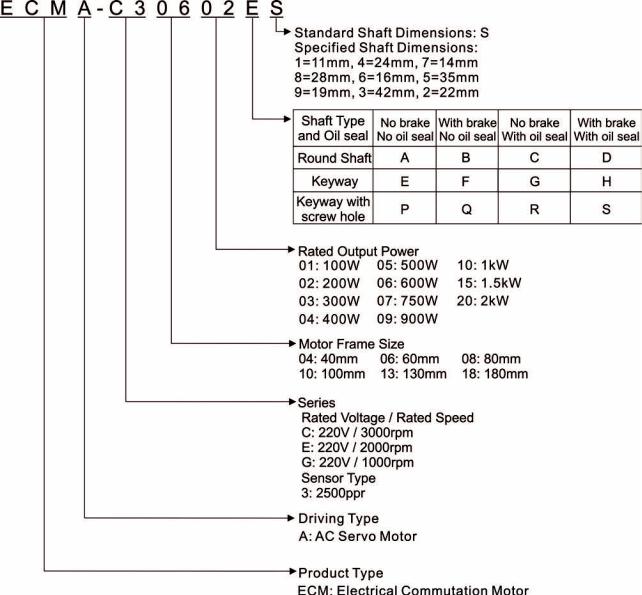
ECMA Series Servo Motor
Revision January 2009 |
1-5 |
Chapter 1 Unpacking Check and Model Explanation|ASDA-B Series
1.3Servo Drive and Servo Motor Combinations
The table below shows the possible combination of Delta ASDA-B series servo drives and ECMA series servo motors. The boxes ( ) in the model names are for optional configurations. (Please refer to Section 1.2 for model explanation)
Servo Drive |
|
Servo Motor |
||
100W |
|
ASD-B0121-A |
ECMA-C30401 S (S=8mm) |
|
|
|
|
|
|
200W |
|
ASD-B0221-A |
ECMA-C30602 S (S=14mm) |
|
|
|
|
|
|
|
|
|
ECMA-C30604 S (S=14mm) |
|
400W |
|
ASD-B0421-A |
ECMA-C30804 7 |
(7=14mm) |
|
ECMA-E31305 S (S=22mm) |
|||
|
|
|
||
|
|
|
ECMA-G31303 S (S=22mm) |
|
|
|
|
|
|
750W |
|
ASD-B0721-A |
ECMA-C30807 S (S=19mm) |
|
|
ECMA-G31306 S (S=22mm) |
|||
|
|
|
||
|
|
|
|
|
|
|
|
ECMA-C31010 S (S=22mm) |
|
1000W |
|
ASD-B1021-A |
ECMA-E31310 S (S=22mm) |
|
|
|
|
ECMA-G31309 S (S=22mm) |
|
|
|
|
|
|
1500W |
|
ASD-B1521-A |
ECMA-E31315 S (S=22mm) |
|
|
|
|
|
|
|
|
|
ECMA-C31020 S (S=22mm) |
|
2000W |
|
ASD-B2023-A |
ECMA-E31320 S (S=22mm) |
|
|
|
|
ECMA-E31820 S (S=35mm) |
|
|
|
|
|
|
The drives shown in the above table are designed for use in combination with the specific servo motors. Check the specifications of the drives and motors you want to use.
Also, please ensure that both the servo drive and motor are correctly matched for size (power rating). If the power of motor and drive is not within the specifications, the drive and motor may overheat and servo alarm would be activated. For the detail specifications of servo drives and motors, please refer to Chapter 11 “Specifications”.
The drives shown in the above table are designed according to the three multiple of rated current of motors shown in the above table. If the drives which are designed according to the six multiple of rated current of motors are needed, please contact our distributors or your local Delta sales representative.
1-6 |
Revision January 2009 |
Chapter 1 Unpacking Check and Model Explanation|ASDA-B Series
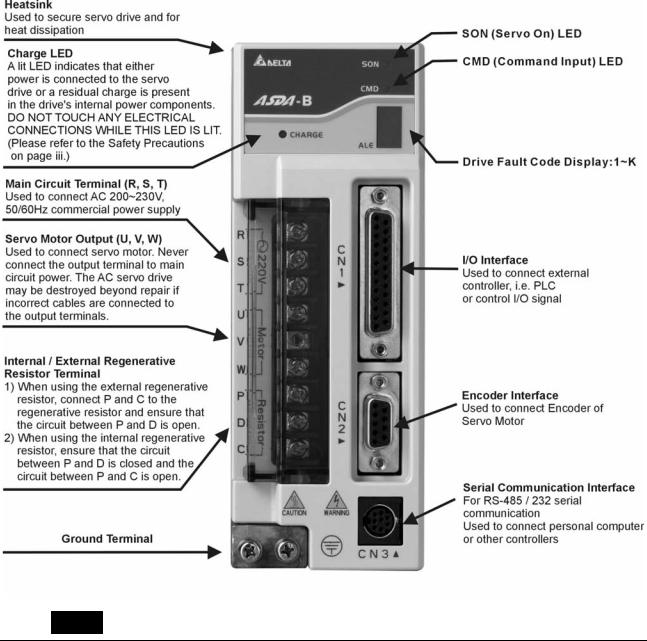
1.4Servo Drive Features



 NOTE
NOTE
1)Only 750W and above servo drives are provided with built-in regenerative resistors. The servo drives below 400W are not.
2)CMD LED: A lit CMD LED indicates that the servo drive is ON (Servo On) or the motor speed is equal to or higher than the setting value of P1-38 (>=P1-38 (ZSPD)).
Revision January 2009 |
1-7 |
Chapter 1 Unpacking Check and Model Explanation|ASDA-B Series
1.5Control Modes of Servo Drive
The Delta Servo can be programmed to provide five single and three dual modes of operation. Their operation and description is listed in the following table.
|
Mode |
Code |
Description |
|
|
|
|
|
|
|
External Position Control |
P |
Position control for the servo motor is achieved via an |
|
|
external pulse command. |
|||
|
|
|
||
|
|
|
|
|
|
|
|
Speed control for the servo motor can be achieved via |
|
|
|
|
parameters set within the servo drive or from an external |
|
|
Speed Control |
S |
analog -10 ~ +10 Vdc command. Control of the internal |
|
|
|
|
speed parameters is via the Digital Inputs (DI). (A |
|
|
|
|
maximum of three speeds can be stored internally). |
|
|
|
|
|
|
|
|
|
Speed control for the servo motor is only achieved via |
|
Single |
Internal Speed Control |
Sz |
parameters set within the servo drive. Control of the |
|
internal speed parameters is via the Digital Inputs (DI). (A |
||||
|
|
|||
Mode |
|
|
maximum of three speeds can be stored internally). |
|
|
|
|
|
|
|
|
|
Torque control for the servo motor can be achieved via |
|
|
|
|
parameters set within the servo drive or from an external |
|
|
Torque Control |
T |
analog -10 ~ +10 Vdc command. Control of the internal |
|
|
|
|
torque parameters is via the Digital Inputs (DI). (A |
|
|
|
|
maximum of three torque levels can be stored internally). |
|
|
|
|
|
|
|
|
|
Torque control for the servo motor is only achieved via |
|
|
Internal Torque Control |
Tz |
parameters set within the servo drive. Control of the |
|
|
internal torque parameters is via the Digital Inputs (DI). (A |
|||
|
|
|
||
|
|
|
maximum of three torque levels can be stored internally). |
|
|
|
|
|
|
|
|
S-P |
Either S or P control mode can be selected via the Digital |
|
|
|
Inputs (DI). (Please refer to Chapter 7 for more detailed DI |
||
|
|
|
setting.) |
|
|
|
|
|
|
|
Dual Mode |
T-P |
Either T or P control mode can be selected via the Digital |
|
|
Inputs (DI). (Please refer to Chapter 7 for more detailed DI |
|||
|
|
|
setting.) |
|
|
|
|
|
|
|
|
S-T |
Either S or T control mode can be selected via the Digital |
|
|
|
Inputs (DI). (Please refer to Chapter 7 for more detailed DI |
||
|
|
|
setting.) |
The above control modes can be accessed and changed via by parameter P1-01. If the control mode is changed, switch the drive off and on after the new control mode has been entered. The new control mode will only be valid after drive off/on action. Please see safety precautions on page iii (switching drive off/on multiple times).
1-8 |
Revision January 2009 |

Chapter 2 Installation and Storage
2.1Installation Notes
Pay close attention on the following installation notes:
Do not bend or strain the connection cables between servo drive and motor.
When mounting servo drive, make sure to tighten screws to secure the drive in place.
If the servo motor shaft is coupled directly to a rotating device ensure that the alignment specifications of the servo motor, coupling, and device are followed. Failure to do so may cause unnecessary loads or premature failure to the servo motor.
If the length of cable connected between servo drive and motor is more than 20m (65.62ft.), please increase the wire gauge of the encoder cable and motor connection cable (connected to U, V, W terminals).
Make sure to tighten the screws for securing motor.
2.2Storage Conditions
The product should be kept in the shipping carton before installation. In order to retain the warranty coverage, the AC servo drive should be stored properly when it is not to be used for an extended period of time. Some storage suggestions are:
Store in a clean and dry location free from direct sunlight.
Store within an ambient temperature range of -20°C to +65°C (-4°F to 149°F).
Store within a relative humidity range of 0% to 90% and non-condensing.
Do not store in a place subjected to corrosive gases and liquids.
Correctly packaged and placed on a solid surface.
Revision January 2009 |
2-1 |
Chapter 2 Installation and Storage|ASDA-B Series
2.3Installation Conditions
Operating Temperature |
|
|
ASDA-B Series Servo Drive |
: |
0°C to 45°C (32°F to 113°F) |
ECMA Series Servo Motor |
: |
0°C to 40°C (32°F to 104°F) |
The ambient temperature of servo drive for long-term reliability should be under 45°C (113°F).
If the ambient temperature of servo drive is greater than 45°C (113°F), please install the drive in a wellventilated location and do not obstruct the airflow for the cooling fan.
Caution
The servo drive and motor will generate heat. If they are installed in a control panel, please ensure sufficient space around the units for heat dissipation.
Pay particular attention to vibration of the units and check if the vibration has impacted the electric devices in the control panel. Please observe the following precautions when selecting a mounting location. Failure to observe the following precautions may void the warranty!
Do not mount the servo drive or motor adjacent to heat-radiating elements or in direct sunlight.
Do not mount the servo drive or motor in a location subjected to corrosive gases, liquids, or airborne dust or metallic particles.
Do not mount the servo drive or motor in a location where temperatures and humidity will exceed specification.
Do not mount the servo drive or motor in a location where vibration and shock will exceed specification.
Do not mount the servo drive or motor in a location where it will be subjected to high levels of electromagnetic radiation.
2-2 |
Revision January 2009 |

Chapter 2 Installation and Storage|ASDA-B Series
2.4Installation Procedure and Minimum Clearances
Installation Procedure
Incorrect installation may result in a drive malfunction or premature failure of the drive and or motor. Please follow the guidelines in this manual when installing the servo drive and motor.
The ASDA-B servo drive should be mounted perpendicular to the wall or in the control panel. In order to ensure the drive is well ventilated, ensure that the all ventilation holes are not obstructed and sufficient free space is given to the servo drive. Do not install the drive in a horizontal position or malfunction and damage will occur.
Drive Mounting
The ASDA-B Servo drives must be back mounted vertically on a dry and solid surface such as a NEMA enclosure. A minimum spacing of two inches must be maintained above and below the drive for ventilation and heat dissipation. Additional space may be necessary for wiring and cable connections. Also, as the drive conducts heat away via the mounting, the mounting plane or surface should be conductor away and not conduct heat into the drive from external sources
Motor Mounting
The ECMA Servo motors should be mounted firmly to a dry and solid mounting surface to ensure maximum heat transfer for maximum power output and to provide a good ground.
For the dimensions and weights specifications of servo drive or motor, please refer to Chapter 11 “Specifications".
Minimum Clearances
Install a fan to increase ventilation to avoid ambient temperatures that exceed the specification. When installing two or more drive adjacent to each other please follow the clearances as shown in the following diagram.
Revision January 2009 |
2-3 |

Chapter 2 Installation and Storage|ASDA-B Series
Minimum Clearances
2.0in (50mm) min.
|
0.8in |
|
0.8in |
||
(20mm) |
(20mm) |
||||
|
min. |
|
min. |
||
|
|
|
|
|
|
2.0in (50mm) min.
Side by Side Installation
|
4.0in |
|
|
|
|
|
4.0in |
|
||
|
|
|
|
|
|
|
||||
|
FAN |
|
FAN |
|
||||||
|
(100mm) |
|
(100mm) |
|
||||||
|
|
min. |
|
|
|
|
|
min. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.6in |
0.4in |
0.4in |
0.4in |
|
1.6in |
||||||||
(40mm) |
(10mm) |
(10mm) |
(10mm) |
(40mm) |
||||||||||
|
min. |
|
min. |
min. |
min. |
|
min. |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4.0in |
Air flow |
Air flow |
4.0in |
(100mm) |
|
|
(100mm) |
min. |
|
|
min. |
2-4 |
Revision January 2009 |

Chapter 3 Connections and Wiring
This chapter provides information on wiring ASDA-B series products, the descriptions of I/O signals and gives typical examples of wiring diagrams.
3.1Connections
3.1.1 Connecting to Peripheral Devices
In Figure 3.1, it briefly explains how to connect each peripheral device.
Figure 3.1
Revision January 2009 |
3-1 |
Chapter 3 Connections and Wiring|ASDA-B Series
3.1.2 Servo Drive Connectors and Terminals
Terminal |
Terminal |
|
Notes |
|
||
Identification |
Description |
|
|
|||
|
|
|
|
|||
|
|
The Main Circuit Terminal is used to supply the servo with |
||||
R, S, T |
Main circuit terminal |
line power. If a single-phase supply, is used connect the R |
||||
and S terminals to power. If 3-phase, connect all three R, S, |
||||||
|
|
|||||
|
|
& T terminals. |
|
|
|
|
|
|
|
|
|
||
|
|
Used to connect servo motor |
||||
|
|
|
|
|
||
|
|
Terminal Symbol |
Wire Color |
|
||
U, V, W |
Servo motor output |
U |
Red |
|
|
|
FG |
V |
White |
|
|
||
|
|
|||||
|
|
|
|
|
||
|
|
W |
Black |
|
|
|
|
|
|
|
|
||
|
|
FG |
Green |
|
|
|
|
|
|
|
|
||
|
|
|
Ensure the circuit is closed between P |
|||
|
|
Internal resistor |
and D, and the circuit is open between |
|||
|
|
|
P and C. |
|||
|
|
|
|
|||
|
Regenerative |
|
Connect regenerative resistor to P and |
|||
P, D, C |
External resistor |
C, and ensure an open circuit between |
||||
resistor terminal |
|
P and D. |
||||
|
|
|||||
|
|
|
|
|
|
|
Only 750W and above servo drives are provided with builtin regenerative resistors. Ensure to leave the circuit closed between P and D when using a built-in (internal) regenerative resistor.
|
|
|
|
|
two places |
Ground terminal |
Used to connect grounding wire of power supply and servo |
||
|
|
|
|
|
|||||
|
|
|
|
|
motor. |
|
|
||
|
|
|
|
|
|
|
|
|
|
CN1 |
I/O connector |
Used to connect external controllers. Please refer to section |
|||||||
3.3 for details. |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Used to connect encoder of servo motor. Please refer to |
||
|
|
|
|
|
|
|
section 3.4 for details. |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Terminal Symbol |
Wire Color |
|
|
|
|
|
|
|
|
A |
Black |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
/A |
Black/Red |
|
|
|
|
|
|
|||||
CN2 |
Encoder connector |
B |
White |
|
|||||
|
|
|
|
|
|
|
/B |
White/Red |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z |
Orange |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
/Z |
Orange/Red |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+5V |
Brown & Brown/White |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
GND |
Blue & Blue/White |
|
|
|
|
|
|
|
|
|
|
|
CN3 |
Communication |
Used to connect PC or keypad. Please refer to section 3.5 |
|||||||
connector |
for details. |
|
|
||||||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|



 NOTE
NOTE
1) U, V ,W , CN1, CN2, CN3 terminals provide short circuit protection.
3-2 |
Revision January 2009 |
Chapter 3 Connections and Wiring|ASDA-B Series
Wiring Notes
Please observe the following wiring notes while performing wiring and touching any electrical connections on the servo drive or servo motor.
1.Ensure to check if the power supply and wiring of the "power" terminals (R, S, T, U, V, & W) is correct.
2.Please use shielded twisted-pair cables for wiring to prevent voltage coupling and eliminate electrical noise and interference.
3.As a residual hazardous voltage may remain inside the drive, please do not immediately touch any of the "power" terminals (R, S, T, U, V, & W) and/or the cables connected to them after the power has been turned off and the charge LED is lit. (Please refer to the Safety Precautions on page iii).
4.The cables connected to R, S, T and U, V, W terminals should be placed in separate conduits from the encoder or other signal cables. Separate them by at least 30cm (11.8inches).
5.If the encoder cable is too short, please use a twisted-shield signal wire with grounding conductor. The wire length should be 20m (65.62ft.) or less. For lengths greater than 20m (65.62ft.), the wire gauge should be doubled in order to lessen any signal attenuation.
6.As for motor cable selection, please use the 600V PTFE wire and the wire length should be less than 30m (98.4ft.). If the wiring distance is longer than 30m (98.4ft.), please choose the adequate wire size according to the voltage.
7.The shield of shielded twisted-pair cables should be connected to the SHIELD end (terminal marked  ) of the servo drive.
) of the servo drive.
8.For the connectors and cables specifications, please refer to section 3.1.6 for details.
9.In this manual, actual measured values are in metric units. The recommended wire lengths in (imperial units) are for reference only. Please use metric for precise measurements.
Revision January 2009 |
3-3 |
Chapter 3 Connections and Wiring|ASDA-B Series
3.1.3 Wiring Methods
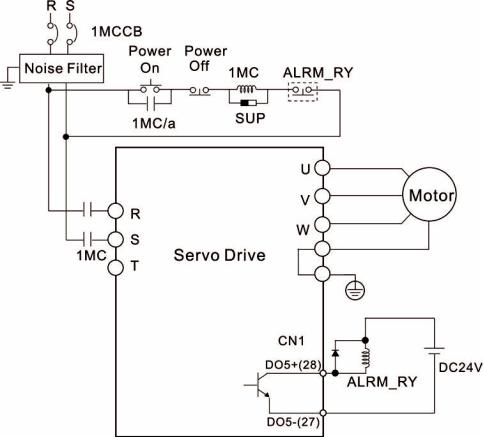
For servo drives 1.5kW and below the input power can be either single or three-phase. For drives 2kW and above only three-phase connections are available.
In the wiring diagram figures 3.2 & 3.3:
Power ON : contact “a” (normally open)
Power OFF or Alarm Processing : contact “b” (normally closed)
1MC/x : coil of electromagnetic contactor
1MC/a : self-holding power
1MC : contact of main circuit power
Figure 3.2 Single-Phase Power Supply Connection
3-4 |
Revision January 2009 |
Chapter 3 Connections and Wiring|ASDA-B Series
Figure 3.3 Three-Phase Power Supply Connection
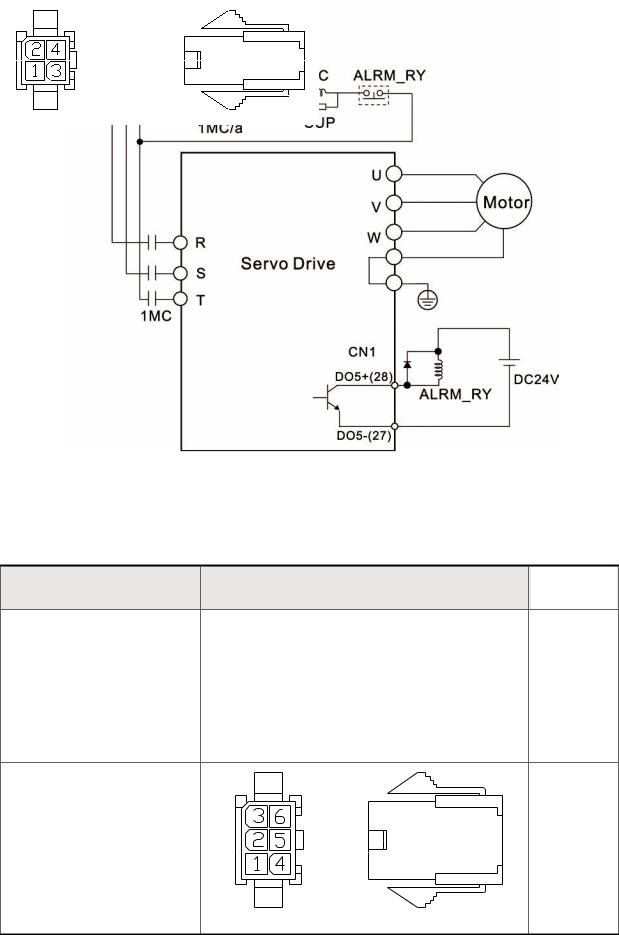
3.1.4 Motor Power Cable Connector Specifications
The boxes ( ) in the model names are for optional configurations. (Please refer to section 1.2 for model explanation.)
Motor Model Name U, V, W / Electromagnetic Brake Connector
Terminal
Identification
ECMA-C30401 S (100W)
ECMA-C30602 S (200W)
ECMA-C30604 S (400W) A ECMA-C30804 7 (400W)
ECMA-C30807 S (750W)
HOUSING: JOWLE (C4201H00-2*2PA)
ECMA-C30602 S (200W)
ECMA-C30604 S (400W)
B
ECMA-C30804 7 (400W)
ECMA-C30807 S (750W)
HOUSING: JOWLE (C4201H00-2*3PA)
Revision January 2009 |
3-5 |
Loading...